1.4. Состав и структура системы АСУ-Ш-2
реклама

Российская Федерация
Министерство путей сообщения
ГОУ ВПО «Дальневосточный государственный университет
путей сообщения МПС России»
Е. Р. Крамаренко
СИСТЕМЫ СБОРА ИНФОРМАЦИИ НА
ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ
Хабаровск
Издательство ДВГУПС
2005
УДК.681.3
К 777
Рецензенты:
доктор технических наук, профессор, заведующий кафедрой
Автоматизация и системотехника ХГТУ
Главный инженер службы сигнализации и связи ДВЖД
С. Н. Рябов
Крамаренко Е.Р.
К 777
Системы сбора информации на железнодорожном транспорте.
Курс лекций / Е. Р. Крамаренко - Хабаровск: Изд-во ДВГУПС, 2005. - 145 с.:
ил.
Конспект лекций соответствует Государственному образовательному
стандарту по специальности 0719 Информационные системы на ж.-д.
транспорте.
В курсе лекций даны классификация и характеристика основных
систем сбора информации, принцип действия датчиков, функционирующих
на
ж.-д.
транспорте.
Рассмотрены
вопросы
диагностики
и
метрологического обеспечения устройств.
Конспект лекций предназначен для студентов дневной формы
обучения специальности 0719 Информационные системы на ж.-д.
транспорте, а также может быть полезен студентам специальности 2107
«Автоматика, телемеханика и связь».
УДК 681.3
ББК
ГОУ ВПО «Дальневосточный государственный университета
путей сообщения МПС России» (ДВГУПС), 2005
2
ВВЕДЕНИЕ
Сущность деятельности железнодорожного транспорта состоит в
выполнении перевозочного процесса при неукоснительном соблюдении
безопасности движения поездов. Перевозочный процесс сложен своей
динамичностью, взаимозависимостью работы его участников, непрерывно
меняющимися ситуациями, воздействиями на него большого числа
дестабилизирующих факторов и территориальной рассредоточенностью
объектов. Поэтому автоматизация управления является важным
фактором
совершенствования
перевозочного
процесса.
Автоматизированные системы управления (АСУ) строятся на основе
современных технических средств и, в частности, средств вычислительной
техники. Поступившие в распоряжение разработчиков автоматизации
вычислительные машины открывают широкие возможности использования
математических методов для управления сложными процессами.
Однако, технические средства управления состоят не только из
устройств переработки всей информации для получения команд или
рекомендаций по управлению и отображению информации человеку.
Важную роль играет подсистема подготовки, получения и первичной
обработки информации о ходе технологического процесса. Именно эти
вопросы и рассматриваются при изучении дисциплины «Системы сбора
информации
на
ж.-д.
транспорте».
Дисциплина
служит
для
формирования у студентов знаний об основных принципах построения,
метрологического обеспечения и функционирования систем сбора
информации (ССИ) о транспортных процессах и технических объектах
железнодорожного транспорта. Для более глубокого изучения студент
может обратится к другим источникам литературы, ориентировочный
список которых приведен в конце конспекта.
В курсе лекций автором собран материал, показывающий назначение
измерительного оборудования, основные принципы построения и
метрологические показатели ССИ. Он ориентирован на студентов
специальности Информационные системы, но может быть полезен и
студентам специальности «Автоматика, телемеханика и связь на
железнодорожном транспорте».
3
СОКРАЩЕНИЯ ИСПОЛЬЗУЕМЫЕ В ТЕКСТЕ
АБ - автоматическая блокировка
АСК ПС - автоматизированная система
контроля подвижного состава
АЛС - автоматическая локомотивная
сигнализация
АТ – автоматика и телемеханика
АПД - аппаратура передачи данных
АРМ - автоматизированное рабочее
место
АРС – автоматический роспуск составов
АСК ПС - автоматизированная система
контроля подвижного состава
АСОУП - автоматизированная система
оперативного управления грузовыми
перевозками;
АСУ - автоматизированные системы
управления
АЦП - аналого-цифровой
преобразователь
БД – база данных
ВТ – вычислительная техника
ГАЦ – горочная автоматическая
централизация
ДДК - детектор дефектных колес
ДИСК – дистанционная информационная
система комплексная для задач
ПОНАБ
ДСО - датчики для счета осей
ДНЦ – поездной диспетчер
ДСП – дежурный по станции
ДЦ - диспетчерская централизация
ДЦ ФТО – дорожный центр фирменного
транспортного обслуживания
ЕКС - единая комплексная система
управления и обеспечения
безопасности движения
ЖАТС – ж.-д.автоматика и связь
ИВЦ - информационно вычислительный
центр
ИИС - информационно-измерительные
системы
ИП - измерительный преобразователь
КБД - кодовый бортовой датчик
КВЛ - комплекс вагона-лаборатории
КЛУБ
- комплексное локомотивное
устройство безопасности
4
КТСМ – комплекс технических средств
многофункциональный для ПОНАБ
ЛС – локомотивный светофор
МПС – министерство путей сообщения
МФД - многофункциональный датчик
НИС – служба информатизации и связи
НОД – отделение железной дороги
НСУ - напольное считывающее
устройство
ПАБ - полуавтоматическая блокировка
ПД - путевой датчик
ПК – перефирийный контроллер
ПО - программное обеспечение
ПОНАБ – приборы обнаружения
перегретых букс
ПП - первичный преобразователь
ПТО - пункт технического обслуживания
ПЧ - дистанция пути
РТУ - ремонтно-технологический участок
РЦ - рельсовые цепи
САУТ - система автоматического
управления тормозами
СПД - сеть передачи данных
СИ – средство измерений
ССИ - системы сбора информации
СЦБ – сигнализация, централизация и
блокировка
ТД – техническая диагностика
ТО - техническое обслуживание
ТП - технологические процессы
ТУ,ТС – сигналы ДЦ (телеуправления,
телесигнализации)
ТПС - тяговый подвижной состав
ТЧ – локомотивное хозяйство
УВК - управляющий вычислительный
комплекс
УКТП - устройство контроля тормозов
поезда
ЦАП - цифро-аналоговый
преобразователь
ЦУП - центр управления перевозками
ФВ – физическая величина
Ш – служба СЦБ
ШЧ - дистанции сигнализации, связи и
вычислительной техники
ЭЦ - электрическая централизация
ЛЕКЦИЯ 1. ОРГАНИЗАЦИЯ СИСТЕМ СБОРА ИНФОРМАЦИИ
1.1. Понятия и определения в информационно-измерительной
технике
Измерение
представляет
собой
информационный
процесс,
результатом которого является получение информации. Измерительная
информация обязательно представляется в числовой форме и в
дальнейшем
используется
либо
человеком-оператором,
либо
автоматизированной системой, осуществляющей обработку, хранение и
передачу этой информации.
Объектом измерения является та или иная физическая величина (ФВ).
Физическая величина определяется как свойство, общее в качественном
отношении многим физическим объектам (физическим системам, их
состояниям и происходящим в них процессам), но в количественном
отношении индивидуальное для каждого объекта. Например, ФВ
являются
масса,
расстояние,
давление,
сила,
электрическое
сопротивление и т. п.
Очевидно, что не все физические свойства реальных объектов
являются ФВ. К таким физическим свойствам относятся, например, форма
тела или фигуры, запах, цвет. Указанные физические свойства не относятся к физическим величинам и не могут быть измерены. Поэтому ФВ
иногда определяют как физические свойства, поддающиеся измерению
[22, 25].
Из определения измерения следует, что для получения измерительной
информации необходимо сравнить измеряемую величину с физически
однородной ей величиной известного размера. Для числового
представления результата сравнения используется единица измерения.
Единица изменения — это ФВ, которой по определению присвоено
числовое значение, равное единице [12].
При выбранной единице измерения результат сравнения можно
записать в виде формулы
Q
a,
(1.1)
q
где Q — измеряемая величина; q - единица измерения; a — числовое
значение измеряемой величины в принятых единицах измерения.
Истинное значение физической величины — значение ФВ, которое
идеальным образом отражало бы в качественном и количественном
отношениях
соответствующее
свойство
объекта.
Определить
экспериментально истинное значение ФВ невозможно, оно остается
неизвестным экспериментатору. В связи с этим при необходимости (напр.,
при проверке средств измерений) вместо истинного значения ФВ
используют ее действительное значение.
Действительное значение физической величины – значение ФВ,
найденное экспериментальным путем и настолько приближающееся к
5
истинному значению, что для данной цели может быть использовано
вместо него. Действительное значение ФВ определяют по образцовым
мерам и приборам, погрешностями которых по сравнению с
погрешностями поверяемых средств измерений можно пренебречь.
Наука об измерениях называется метрологией. Метрология
поддерживает следующие цели: достоверность измерений; точность
измерений; единство измерений [32, 35].
Погрешность измерений – отклонение результата измерений от
действительного значения измеряемой величины. Она возникает из-за
несовершенства используемых средств и методов измерений.
Средство измерений – это техническое средство (или их комплекс),
предназначенное
для
измерений,
имеющие
нормированные
метрологические характеристики, воспроизводящие и (или) хранящие
единицу физической величины, размер которой принимается неизменным
(в пределах установленной погрешности) в течение известного интервала
времени.
Под метрологическими характеристиками понимаются такие свойства средств измерения, которые позволяют судить об их пригодности для
измерения определенной ФВ с заданной точностью и в заданном
диапазоне.
Методы измерений представляет собой совокупность приемов
использования средств измерений [24, 41]. Существует несколько видов
измерений.
По характеру зависимости измеряемой величины от времени
измерения разделяются на статические, при которых измеряемая
величина остаётся постоянной во времени, и динамические, которые
изменяются во времени. Статистическими измерениями являются,
например,
измерения
размеров
тела,
постоянного
давления,
динамическими – измерения пульсирующих давлений, вибраций.
По способу получения результатов измерений их разделяют на
прямые, косвенные, совокупные, совместные. Прямые – это измерения,
при которых искомое значение ФВ находят непосредственно из опытных
данных. Прямые измерения можно выразить формулой Q X , где Q –
искомое значение измеряемой величины, а
– значение,
X
непосредственно получаемое из опытных данных. При прямых измерения
измеряемую величину сравнивают с мерой непосредственно или же с
помощью измерительных приборов, градуированных в требуемых
единицах.
Косвенные – это изменения, при которых искомую величину
определяют на основании известной зависимости между этой величиной и
величинами, подвергаемыми прямым измерениям. Значения измеряемой
величины находят путем вычисления по известной формуле
Q f (a, b, c...) , где f – знак функциональной зависимости, форма которой
6
и природа связанных с ею величин заранее известны; a, b, c... - значения
величин, измеренных прямым способом.
Примерами косвенных измерений могут служить определение объема
тела по прямым измерениям его геометрических размеров, определения
массы жидкости по измеренному объему, плотности, температуре,
давлению и др. Косвенные измерения широко распространены в тех
случаях, когда искомую величину невозможно или слушком сложно
измерить непосредственно или когда прямое измерение дает менее
точный результат. Роль косвенных измерений особо велика при
измерении
величин,
недоступных
непосредственному
экспериментальному сравнению, например, размеров астрономического
или внутриатомного порядка.
Совокупные – это измерения, производимые одновременно для
нескольких одноименных величин, при которых искомую величину
определяют решением систем уравнений, получаемых при прямых
измерениях.
Совместные
измерения
–
это
измерения,
производимые
одновременно (прямые или косвенные) двух или нескольких не
одноименных величин. Целью совместных измерений является
нахождение функциональной зависимости между величинами, например,
зависимости размеров тела от температуры, объема жидкости от
давления и т.д.
При
проведении
измерений
требуются
следующие
виды
совместимости. Информационная совместимость обеспечивается
согласованностью входных и выходных сигналов; стандартными
интерфейсами, под которыми понимаются как средства сопряжения
отдельных модулей и блоков, так и правила обмена информацией между
блоками,
перечень
команд.
Метрологическая
совместимость
обеспечивается
согласованностью
метрологических
характеристик
отдельных блоков и модулей. Энергетическая совместимость
достигается унификацией параметров энергопитания, схем, конструкций и
технических характеристик
источников и
трасс энергопитания.
Конструктивная совместимость достигается унификацией форм и
разновидностей элементов конструкций, типоразмеров элементов,
использованием единых прогрессивных технологических процессов и
сборки конструкций, обеспечения удобства использования и соблюдения
единого
стиля
оформления.
Программная
совместимость
обеспечивается унификацией, согласованностью и нормированием правил
обмена информацией между функциональными блоками и модулями.
7
1.2. Автоматизация сбора и обработки данных
Различают три способа сбора, регистрации данных: ручной;
механизированный (с помощью специальных средств автоматизации
сбора и регистрации); автоматический.
При ручном способе данные вручную заносятся на первичные
документы, а затем с помощью устройств подготовки данных переносятся
на машинные носители для автоматического ввода их в ЭВМ.
При механизированном способе используют машиночитаемые
документы, представляющие собой первичные документы, совмещенные с
машинным носителем (дуаль-карты, типизированные бланки для
читающих автоматов, регистраторы). В машиночитаемых документах
данные записываются специальными знаками, например в банковских
чеках, железнодорожных билетах, накладных и др.
Автоматизированный сбор информации
осуществляется со
специальных систем сбора и регистрации информации, позволяющих
собирать информацию одновременно с большого количества абонентских
пунктов. Это позволяет непрерывно фиксировать состояние перевозочного
процесса, выполнение графика движения поездов, подсчитывать
основные и итоговые показатели работы различных ведомств МПС [6].
В самом общем случае компьютеризированная измерительная
система может быть спроектирована двумя способами: как
централизованная система и как децентрализованная система.
На рис 1.1 показана измерительная система [22, 39] с
«децентрализованной» архитектурой. В этой системе каждый канал
содержит свои собственные узлы преобразования, и только цифровой
процессор работает в режиме временного мультиплексирования. Такой
принцип позволяет производить оптимизацию в каждом канале
независимо. Кроме того, блоки преобразования при такой архитектуре
могут быть в k - раз более медленными, чем те же узлы в
централизованной системе. Следовательно, эти отдельные блоки
преобразования будут менее дорогими. В такой системе преобразование
можно выполнять локально в месте расположения источника сигнала, а
это означает, что сигналы от измерительного источника к процессору
можно передавать в цифровом виде
Схема выборки и
хранения
АЦП
УИ
В
Ф
8
УВ
АЦП
В
процессор
память
Шина для связи с
другими
процессорами
В
ЦАП
Ф
У
В
ЦАП
Ф
У
ЦМ
УВ
ЦМ
Ф
Ф – фильтры; УВ – устройства взятия выборок; ЦАП – преобразователи; В – буферные
схемы; ЦМ – цифровой мультиплексор; УИ – устройство индикации; У – усилители.
Рис. 1.1. Децентрализованная измерительная схема
(а не в виде аналоговых сигналов, которые очень чувствительны к
помехам). Далее, используя микрокомпьютеры, каждый из каналов можно
снабдить своим препроцессором, разгружающим главный компьютер.
Соединение между процессорами в измерительной системе может быть
реализовано в виде «шины». О системе с такой архитектурой говорят как о
распределенной измерительной системе. Процессор может быть соединен
также с другими, автономно работающими измерительными системами, не
входящими в состав сбора данных. Часто это осуществляют с помощью
той или иной стандартной шины (например, с помощью IEEE-488).
В
централизованной
системе
части,
ответственные
за
преобразование сигнала, используются для обработки всех сигналов
последовательно. Поэтому соответствующая электроника размещается
обычно в центральном компьютере. Достоинства этой системы очевидны:
благодаря использованию частей, ответственных за преобразование
сигнала, по принципу разделения времени стоимость системы низка [22].
Если в централизованной системе сбора данных сигналы в отдельных
каналах сильно различаются по величине, то можно в центральную часть
системы добавить программируемый усилитель. Тогда его коэффициент
усиления будет изменятся процессором одновременно с изменением
адреса канала. Однако переключение усилителя на новое значение
коэффициента усиления потребует определенного времени и из-за этого
максимальная скорость сканирования в системе понизится. Поэтому важно
разбивать каналы на группы с примерно одинаковым уровнем сигналов.
Тогда можно будет программируемый усилитель переключать не каждый
раз при обращении к новому каналу. Еще лучше воспользоваться
субкоммутацией, предусмотрев, например, три входных мультиплексора
(для работы с сигналами низкого, среднего и высокого уровня) и включив
на выходе каждого из них свой усилитель с фиксированным
коэффициентом усиления так, чтобы только после этого происходило
окончательное мультиплексирование сигналов в один канал.
На вход одного из каналов системы часто подают «опорный сигнал»
или «сигнал калибровки». Тогда можно обнаружить уход коэффициентов
передачи и запрограммировать цифровой процессор на коррекцию этих
ошибок.
Нередко система сбора данных должна воспринимать также ряд
двоичных сигналов, таких, например, как положение переключателей или
9
входные сигналы датчиков обнаружения (пожара, перегрузки и других
нежелательных событий). Система сбора данных должна содержать также
«блок синхронизации и управления», работающий под управлением
компьютера.
Этот
блок
вырабатывает
управляющие
сигналы,
необходимые для надлежащего функционирования самой системы, на
основе которых генерируются адреса каналов, выдаются команды
перехода в режим хранения и команды преобразования, устанавливаются
коэффициенты усиления и т.д.
Поскольку фактически все измеряемые параметры и переменные
макроскопических физических процессов в окружающем нас мире
являются аналоговыми по своей природе. Поэтому мы принимаем в
качестве определения, что аналоговый измерительный сигнал – это такой
сигнал, величина (амплитуда) которого известна для каждого момента в
пределах выделенного отрезка и может принимать любые значения в
интервале между определёнными нижним и верхним пределами. Таким
образом, аналоговый сигнал является непрерывным как по времени, так и
по величине.
Цифровые компьютеры не могут манипулировать с такими сигналами
непосредственно; они могут обрабатывать и вырабатывать только
цифровые сигналы. Чтобы переходить от аналоговых сигналов к
цифровым (и обратно), нам необходимо выполнить процедуру, носящую
название «преобразование сигнала». Частью такого преобразования
является отображение непрерывного по времени сигнала в дискретный по
времени сигнал. Дискретный по времени сигнал определён только в
отдельных точках на оси времени. Он получается из аналогового сигнала
путём дискретизации по времени. Такой сигнал легко получить с помощью
электронной схемы взятия выборок.
Помимо способности
обрабатывать только те данные, которые
относятся к дискретным моментам времени, компьютер имеет дело со
словами ограниченной длины. Поэтому он может воспринимать величину
сигнала лишь с конечным разрешением. Компьютер является
устройством, для которого не только время является дискретным, но и
величина также является квантованной. Поэтому необходимо сделать так,
чтобы значение входного сигнала изменялось только скачками конечной
величины. Такое преобразование называют « квантование по величине».
Оно осуществляется аналого-цифровым преобразователем. Таким
образом , до того, как измерительный сигнал можно будет ввести в
компьютер,
необходимо
получить
выборки
этого
сигнала
(дискретизировать по времени) и их проквантовать (дискретизировать по
величине). Сигнал такого типа, дискретизированный по времени и
квантованный по величине, называют «цифровым сигналом».
10
1.3. Состав комплексной информационной системы
железнодорожного транспорта
Железнодорожный транспорт обрабатывает большое количество
информации. Напр., по существующей системе ручного ввода
информации в хозяйстве перевозок разрабатывается и составляется 15
форм отчетности о вагонных парках. Они содержат в среднем за сутки 969
показателей. При этом учитывается, что 11 форм составляются с
ежесуточной периодичностью, три – с ежемесячной и одна – с годовой.
Ручная система сбора и оперативной отчетности на железнодорожном
транспорте, технология передачи и обработки отчетности мало
эффективна, приводит к большим и нерациональным затратам труда и
средств. При рыночной экономике объективная необходимость выдвигает
на первый план сокращение этих трудозатрат. Поэтому в настоящее
время активно внедряется автоматизация рабочих мест (АРМ) служащих
на основе средств вычислительной техники (ВТ). Новая технология
основана на использовании АРМ, представляющего собой проблемно ориентированный программно-технический комплекс, вынесенный на
рабочее место пользователя и автоматизирующий его основные
производственные функции. Функциональная структура АРМ, состав его
программного обеспечения зависят от множества задач, вытекающих из
предметной области пользователя.
Основные области применения АРМ – автоматизация принятия
управленческих решений и автоматизация технологической деятельности.
Использование АРМ повышает оперативность управленческого труда и
позволяет осуществить учет трудно
формализуемых факторов,
характеризующих экономическую среду, в которой функционирует
предприятие; поиск эффективных решений оптимизационных задач.
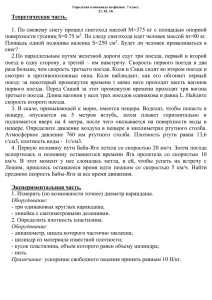
Многоуровневая система управления [37] и обеспечения безопасности
на ж.-д. транспорте реализуется (рис.1.2) как совокупность трех
взаимодействующих аппаратно-программных комплексов:
11
Региональный уровень (ЕДЦУ, ЦУПР…)
ГИД «Урал», АСОУП, ДИСПАРК и др.
АСУ БД
РС
«Шлюз»
МС-СЦБ
ДЦ, ДК
АРМ ДНЦ
Модуль стыковки
МС-СЦБ с АСУ МС
АСУ МС
I
II
МАЛС
Средства
автоматики и
централизации
АРМ ДСП
УВК СИР
Радиомодем
160 МГц
460 МГц
III
ЕКС
Радио модем
180 МГц
ТОР
Светофоры
Рельсовые цепи
Переезды
Стрелки
УКСПС
Другие средства диагностики...
ПОНАБ, ДИСК
Рис. 1.2. Технические средства и системы СЦБ
на тяговом подвижном составе – единая комплексная система
управления и обеспечения безопасности движения (ЕКС); на базе средств
СЦБ – многоуровневая система управления и обеспечения безопасности
(МС-СЦБ); работа всех средств СЦБ контролируется специально
создаваемым управляющим вычислительном комплексом (УВК); на базе
АСУ хозяйствами с использованием информационных систем ОАО «РЖД»
- информационная подсистема АСУ МС.
Главное назначение АСУ МС – автоматизированное обеспечение
соблюдения технологии работы железнодорожного транспорта путем
сбора, обработки и анализа соответствующей информации АСУЖТ с
последующим воздействием на МС-СЦБ и ЕКС. АСУ МС (рис.1.2)
обеспечивает взаимодействие информационно-управляющих систем с
многоуровневой системой. Взаимодействие с ЕКС происходит по
цифровой системе радиосвязи. Информация о работе дорожного уровня
отражается на сайте МС, расположенного на ГВЦ.
Система АСУ МС состоит из нескольких уровней. Уровни управления
движением поездов включает:
− аппаратуру и устройства управления и контроля объектами
(стрелки, светофоры, локомотивы, поезда, маршруты, УКПС и др.);
12
− микропроцессорные системы локального (локомотив, станция)
назначения, формирующие управляющие команды и контролирующие
состояние объектов управления; эти системы обеспечивают выявление,
регистрацию и передачу на следующий уровень информации об
отклонениях состояния технических средств от заданных алгоритмов
действия;
− микропроцессорные
(компьютерные)
системы
ограниченного
назначения (участок железной дороги, отделение дороги), связанные с
локальными системами цифровыми каналами связи и обеспечивающие
концентрацию и распределение информации для верхних уровней
управления, а также для организации технического обслуживания (ТО)
средств ЖАТ;
− аппаратно-программный комплекс в региональном (дорожном)
центре управления перевозками, связанный каналами связи с нижними
уровнями системы и обеспечивающий режим для оперативного персонала,
управляющего перевозками и обслуживанием технических средств.
К АСУ ж.д. транспорта относят три уровня программно-технических
комплексов: сетевой (ОАО РЖД, МПС, ГВЦ); дорожный (ИВЦ дорог,
центры управления перевозками ЦУП, дорожный центр фирменного
транспортного обслуживания ДЦФТО); линейный (абонентские пункты
АСОУП, АРМ линейных предприятий). На рис.1.3 показана структурная
схема сбора информации в службах НИС, СЦБ.
Эффективным
средством
совершенствования
организации
перевозочного процесса являются системы ж.-д. автоматики (СЖАТ). За
счёт внедрения СЖАТ увеличивается пропускная способность, участковая
скорость, степень безопасности движения поездов, производительность и
условия труда, уменьшаются эксплуатационные расходы. Дистанции
сигнализации и связи (ШЧ) производят ТО устройств ЖАТС.
13
Управление техническими
средствами и персоналом
системы техн.обслуживания
СТДМ
Долговременное
управление, планирование,
определение стратегии
Обеспечение оперативного
управления персоналом и
администрирование СТДМ
Хранилище
данных других
систем ШСЦБ
СО
Комплексный анализ данных
СО
НО,
СО
Прогноз состояний
устройств
Выявление неисправностей
и неправильных действий.
Поиск неисправностей
ОУ
Хранилище
данных по ИО и
ПО СТДМ
ТСД
ТСД
А
Мониторинг состояний
устройств, поездного
положения, действий
персонала
ТС
ТС
Контроль состояний
устройств, поездного
положения, действий
персонала
Технические
средства
СТДМ
А
Р
Р
Поездные единицы
СТ
СВ
ПЕР
П
ПИТ
РЦ
Обслуживающий
персонал
ТС – данные о текущем состоянии; А – администрирование; НО – наработка на отказ;
ТСД – данные о текущем состоянии в динамике; УО – учетные данные об отказе; СО –
статистика отказов; РР – рекомендации персонала; СТ – стрелочный перевод; СВ –
светофор; ПЕР – переезд; П – пути; ПИТ – питание; РЦ – рельсовые цепи
Рис.1.3. Структурная схема сбора информации в службах НИС, СЦБ ж.-д. тр-те
Для обеспечения координации работы подразделений, обслуживающих
ЖАТ и связи, вычислительной техники созданы службы соответственно
СЦБ и НИС.
Начальным пунктом зарождения информации является линейная
станция. Оттуда данные поступают в отделение или в управление дороги,
14
в ИВЦ, оттуда в ГВЦ и потом пользователям. Для обеспечения высокой
эффективности работы действующих и вновь создаваемых АСУ
технологическими процессами (ТП) – АСОУП, ДИСПАРК, АКС ФТО,
ДИСКОР и др. объединены в комплексы информационных технологий
КИТ1 и КИТ3 [37].
Для ж.-д. транспорта основным направлением является управление
перевозками грузов и пассажиров, а также связанные с ним
технологические процессы (ТП). Для реализации этого направления
функционирует автоматизированная система оперативного управления
грузовыми перевозками (АСОУП). Задача этой системы – получение
информационного отображения перевозочного процесса на любой момент
времени [16]. Сбор информации для АСОУП осуществляется от различных
(рис.1.4) автоматизированных подсистем сортировочных и грузовых
станций, терминалов на контейнерных пунктах, диспетчерских участков и
пр.
АСОУП
АРМ ДНЦ
АРМ-Ш
ДИСПАРК
Поездная
модель
САИД
АРМ ДСП
АРМ-ШЧ
Локомотивная
модель
Устройства АТ и СПД
ЭЦ АБ ДИСК ПС
И т.д.
Рис.1.4. Упрощенная структурная схема сбора информации для АСОУП
АСОУП обеспечивает контроль дислокации и повагонный состав
поездов, дислокацию локомотивов; прогнозирует подход поездов, вагонов
и грузов; информирование грузополучателей; слежение за отдельными
видами перевозок; контроль передачи поездов через стыковые пункты;
поездное положение на участках.
На базе АСОУП разрабатываются и внедряются системы по
управлению парком грузовых вагонов (ДИСПАРК), контейнерным парком
(ДИСКОН), локомотивным парком (ДИСЛОК), перевозками опасных грузов
(СМОГ), расследованию случаев коммерческой несохранности грузов
15
(ЕАСАПР), перевозкой негабаритных грузов (ТРАНСПОРТЕР). Кроме того,
на информации АСОУП работают диспетчерские центры управления
перевозками на дорогах и БД на сетевом уровне [18, 40].
Сбор данных со станции и из вагонных депо об дислокации и
использовании вагонного парка
производится системой ДИСПАРК.
Данная система контролирует проследование вагонов, их состояние,
имеет базу данных с техническими паспортами всего парка вагонов
(форма ВУ-4), автоматизированное составление натурных листов поезда,
отчетов формы ДО-1,ДУ-11, ДО-15 и пр.
Составной частью интегрированной автоматизированной системы
управления ж.-д. транспортом является система управления линейного
уровня контейнерными пунктами (АСУ КП). Структурно АСУ КП
представляет собой локальную вычислительную сеть, объединяющую
АРМ работников контейнерного пункта (рис.1.5).
сервер
АРМ товарной конторы
АРМ приемосдатчиков
АСОУП
ЕК ИОДВ
БД ПК
АРМ КПП
Рис.1.5. Структурная схема АСУ КП
В АРМ приемосдатчиков решается более 100 функциональных задач,
которые могут быть сформированы в следующие комплексы:
планирование, оперативная работа, выдача оперативных документов,
справки, анализ ситуации, отчетность, работа с архивом, поддержка
кассовых терминалов «Экспресс». Для просмотра и анализа показателей и
создания различных выходных форм работы предприятий, НОД, дороги
создана
система
ДИСКОР.
Кроме
того,
к
технологическим
информационным системам относят: единый комплекс интегрированной
обработки дорожной ведомости ЕК ИОДВ; комплекс по интегрированной
16
обработке
маршрутов
машинистов
ИОММ;
автоматизированную
комплексную систему управления сортировочными станциями АСУ СС.
Они позволяют достичь высокого качества планирования поездной и
маневровой работы.
К оперативно-технологической информации, вводимой в АСУ СС,
относится время прибытия поезда и его номер, уход поездного
локомотива, подача маневрового локомотива, готовность состава к
роспуску, ход накопления составов, готовность поезда к отправлению,
ситуация на подходе к станции и т.д. Существующие системы управления
станционной работой (ГАЦ, ЭЦ, АБ) не позволяют непосредственно, без
промежуточных устройств, вводить вышеперечисленную информацию в
АСУ СС. На первом этапе она вводится операторами вручную, что может
привести к ошибкам и потерям информации и запоздалых принятий
решений. На втором этапе управления сортировочной станцией в
реальном масштабе времени исходная информация поступает с ИВЦ и с
АРМ на станции. На основании этой информации составляется и ведется
сортировочный лист, натурный лист на отправляемые поезда, учитывается
наличие вагонов и поездов в парке; прогнозируется текущая работа
станции и пр.
В области развития пассажирских перевозок наибольшее развитие
получила система
«Экспресс». В функциональном плане система
управляет ТП пассажирского хозяйства: информационно-справочное
обслуживание пассажиров; оформление и учет багажа; управление парком
пассажирских вагонов, включая эксплуатацию и ремонт; предоставление
сервисных услуг пассажиров и др.
В управлении экономикой и финансами (КИТ2) реализована единая
корпоративная система управления финансами и ресурсами (ЕК АСУФР)
на основе программного обеспечения R/3 фирмы SAP AG. Она
обеспечивает [4] контроль и анализ финансово-хозяйственной
деятельности предприятия. Система охватывает несколько сфер
деятельности: бухгалтерский учет; управление финансовыми потоками,
затратами,
основными
фондами,
производством,
материальнотехническими ресурсами, инвестициями, проектам, персоналом, включая
расчет заработной платы; реализацию продукции и услуг. Таким образом,
это единая система управления крупным предприятием. Система SAP R/3
реализована в трехуровневой архитектуре клиент-сервер.
Все информационные потоки, зарождающиеся на линейных
предприятиях различных отраслей ж.-д. транспорта, стекаются в ИВЦ.
Основу программно-технического комплекса ИВЦ составляет ЭВМ IBM9672 с дисковыми массивами общей емкостью 2,7 Тбайт,
производительностью 345 mips и ОС/390. Управление информационными
потоками между подсистемами осуществляется с помощью применения
сетевых технологий. Сеть передачи данных МПС – сложная
17
разветвленная структура, включающая региональные и периферийные
узлы, различные АРМ линейных подразделений.
1.4. Состав и структура системы АСУ-Ш-2
В хозяйстве сигнализации, централизации и блокировки (СЦБ)
находится в эксплуатации огромное число АРМ, большая часть которых
включена в корпоративную дорожную и локальные сети и решает задачи
КИТ3. Система позволяет осуществить: планирование, контроль и анализ
выполнения организационно-технических мероприятий по повышению
безопасности движения; подготовку мероприятий к зиме; планирование и
анализ выполнения капитального ремонта; анализ состояния рельсовых
цепей (РЦ) по ежедневным, недельным, месячным данным для каждой
станции; учет и анализ повреждений приборов СЦБ, вызвавших сбои или
отказы в работе устройств; оперативный учет отказов устройств СЦБ,
ПОНАБ, САУТ, АЛСН, связи, радиосвязи; организацию технологических
окон.
В состав АСУ-Ш-2 входят функциональные комплексы задач:
общесетевые, дорожные, уровня дистанций (ШЧ) и обеспечивающие
подсистемы: подсистема формирования и ведения БД
коллективного
пользования АСУ-Ш-2 и подсистема взаимодействия с другими
автоматизированными интегрированными системами железнодорожного
транспорта.
Комплекс «Учет и анализ нарушений работы устройств
автоматической
локомотивной
сигнализации
и
системы
автоматического управления тормозами» (КЗ-АЛСН) предназначен для
ведения учета и анализа информации о нарушениях работы устройств
АЛСН, САУТ, комплексных локомотивных устройств безопасности (КЛУБ) с
передачей и интеграцией данных по вертикалям ТЧ-ШЧ-Ш-ЦШ.
Комплекс «Учет и анализ состояния (РЦ) по конструктивным
признакам» (КЗ-РЦ) представляет специалистам и руководству
подразделений хозяйств СЦБ и пути на всех уровнях информацию о
состоянии (РЦ). При этом первичная информация о состоянии РЦ по
конструктивным признакам (соединители, балласт, смазка) вводится в
базу данных в ШЧ на основании совместных актов ШЧ и дистанции пути
(ПЧ) и записей в журнале ДУ-46 с последующей передачей и интеграцией
по вертикалям ШЧ-НОДШ и ШЧ- ШЦ-ЦШД.
Комплекс «Разработка и контроль выполнения специализированных
организационно-распорядительных документов» (КЗ-ОРД-Ш) охватывает
весь спектр работ по автоматизации сбора предложений, формирования,
распечатки, рассылки и контроля исполнения общесетевых планов и
мероприятий по повышению безопасности движения поездов, подготовке
устройств к зиме, капитальному ремонту, предотвращению умышленных
18
порч
и
краж
оборудования
СЦБ,
повышению
надежности
функционирования РЦ. Программа предназначена для работников ШЧ,
службы Ш, НОД и ЦШ.
Комплекс «Учет и анализ отказов, повреждений и неисправностей
устройств
ЖАТС» (КЗ-УО-ЖАТС) автоматизирует функции учета
отказов с передачей данных по вертикалям ШЧД-ШД и ШЧД-НОДШ.
Комплекс «Учет и анализ технической оснащенности устройствами
ЖАТ с ведением паспортов по объектам» (КЗ-ТехОС-Ц) должен
формировать базу данных и оснащенности объектов обслуживания ШЧ
системами СЦБ, дистанционного контроля подвижного состава и иными
устройствами автоматики и телемеханики (АТ). База предназначена для
анализа технической оснащенности дистанции с выдачей отчетных и
справочных форм, а также для использования рядом других задач АСУШ-2.
Основными задачами комплекса «Технико-экономическое обеспечение
работы хозяйства Ш» (КЗ ТЭО-Ш) являются: расчет работ в технических
единицах; расчет нормативной численности работников ШЧ; оценка
качества ТО устройств ЖАТС.
Комплекс «Планирование, оптимизация, нормирование и контроль
исполнения работ по ТО устройств ЖАТ» (КЗ КТО- ЖАТС) охватит
весь спектр работ по ТО устройств СЦБ, проводной связи, радиосвязи,
устройств механизации и автоматизации сортировочных горок (ГАЦ) и
иных устройств АТ, выполняемых линейными подразделениями СЦБ и
связи и контролируемых диспетчерским аппаратом ШЧ и Ш. Комплекс
включает функции планирования и контроля исполнения
работ
в
соответствии с нормативной базой ЦШ и дорог.
Комплекс «Учет приборов и планирование работы РТУ» (КЗ УП –
РТУ) включает четыре задачи для ремонтно-технологических участков
(РТУ СЦБ), контрольно-ремонтных пунктов ( КРП-АЛСН), РТУ радио, РТУ
метрологии. Базы данных (БД) передаются в службы Ш и НИС для
контроля за наличием и состоянием приборов, перемещения их между
дистанциями и т.д.
Комплекс «Ведение технической документации по СЦБ» (КЗ-ВТД-Ш)
включает три задачи:
− ведение БД
в ШЧ, Ш с возможностью объединения баз
дистанций в службе;
− доступ к базам данных специалистов хозяйства Ш и, возможно,
специалистов других служб и хозяйств железной дороги;
− работу с базами технической документации, входящими в СБД-Ш.
В комплекс «Ведение журналов диспетчера дистанции» (КЗ ИО-ШЧД)
входят задачи ведения журналов, закрепленных за диспетчером ШЧ
(ШЧД) согласно положения ЦШ-601, журналов учета состояния устройств,
неисправности которых не могут быть устранены немедленно и требуется
19
контроль со стороны в течение длительного времени. В состав КЗ ИОШЧД входят задачи, позволяющие вести такие журналы как, например,
журнал учета разрешений на производство работ с выключением
устройств СЦБ и учета распоряжений. Помимо ведения журналов данный
комплекс выполняет функцию оперативного анализа выполнения работ с
выключением устройств на дистанциях.
Комплекс «Анализ и прогнозирование состояния устройств ЖАТ» (КЗ
ПСУ ЖАТ) предназначен для прогнозирования периодов безотказной
работы устройств ЖАТ, сроков выхода параметров устройств за пределы
нормативных значений. Основная задача КЗ ПСУ ЖАТ состоит в
выполнении функции прогнозирования отказов устройств на основе
комплексного анализа следующих данных статистики отказов и иных
нарушений работы, отслеживания технических параметров устройств,
данных о выработке ресурса.
Комплекс «Организация работ по поиску и устранению отказов
устройств ЖАТ» предназначен для автоматизации функций ШЧД и
электромехаников (ШН) по сбору информации, организации работ и
принятию решений по поиску и устранению отказов.
Задача «Формирование рекомендаций по планированию технического
обслуживания» формирует рекомендации по планированию ТО на базе
результатов, полученных при решении задачи «Организация работ по
поиску и устранению отказов устройств ЖАТ».
1.5. Заключение
Одним из основных требований, предъявляемых к АСУ является
обеспечение гибкости при выполнении различных плановых заданий.
Значительные объемы
используемой информации
и большая
размерность
решаемых задач требуют пристального внимания
к
организации сбора данных. Сбор информации представляет собой ничто
иное, как процесс измерений.
Обследование технологической цепочки
прохождения отчетной
информации от линейных предприятий до отделения и управления
дороги показало, что во всех звеньях технологии присутствуют
рутинные операции. К таким операциям относятся сбор информации по
телефону, запись данных в журнале, подсчеты итогов, передача их по
телефону, подготовка стандартных справок.
Автоматизация рутинных операций обеспечивает перенос данных на
машинные носители информации, снижает число обращающихся в
системе оперативной отчетности бумажных документов, уменьшает
потребности в дублировании данных и их повторных вводах в ПЭВМ.
Широкое внедрение на железнодорожном транспорте персональных
ЭВМ, развитие современных средств передачи данных позволяет найти
20
более рациональной решение обработки оперативной информации [14].
Создание единой информационной базы для различного круга задач
избежать дублирования по вводу информации и позволит доставить
достоверные данные в центр ситуационного управления при МПС (ОАО
РЖД).
ЛЕКЦИЯ 2. ТЕХНИЧЕСОКЕ ОБЕСПЕЧЕНИЕ СИСТЕМ СБОРА
ИНФОРМАЦИИ
2.1. Принципы построения средств измерений
Средство измерений (СИ) является обобщенным понятием,
объединяющим самые разнообразные, конструктивно законченные
устройства, которые реализуют одну из двух функций:
− воспроизводят величину заданного (известного) размера (например,
гиря - заданную массу, магазин сопротивлений - ряд дискретных значений
сопротивления);
− вырабатывают сигнал (показание), несущий информацию о
значении измеряемой величины. Показания СИ либо непосредственно
воспринимаются органами чувств человека (например, показания
стрелочного или цифрового приборов), либо используются для
преобразования другими СИ.
Последняя функция, являющаяся основной, может быть реализована
посредством измерения. СИ должны содержать устройства, которые
выполняют операции. В их число входят измерительные преобразователи,
меры и устройства сравнения (компараторы) [12, 35].
Обобщенная структурная схема СИ показана на рис. 2.1. Сигнал с
выхода измерительного преобразователя (ИП) поступает на первый вход
устройства сравнения, на второй вход которого подается известный сигнал
с выхода многозначной меры. Сравнение измеряемой и известной
величин осуществляется при помощи устройства сравнения. Роль
последнего в простейших СИ выполняет человек. Процесс изменения
прекращается при достижении равенства между величинами X 1 и X M с
точностью до кванта Q .
21
X
X1 F ( X )
Измерительный
преобразователь
F
Устройство
сравнения
X M X 1 Q
X M N Q
Управляющее
устройство
или оператор
Многозначная
мера (Q)
Y1 N
Y2 X M
Y3 X 1
Рис. 2.1. Обобщенная структурная схема средства измерения
Структурная схема, показанная на рис.2.1, описывает три возможных
результата:
− СИ включает все блоки и вырабатывает цифровой сигнал Y1 ,
доступный
восприятию
органами
чувств
человека.
Возможно
формирование выходных сигналов Y1 и Y2 , предназначенных только для
преобразования другими СИ;
− СИ состоит только из измерительного преобразователя, выходной
сигнал которого равен Y3 ;
− СИ содержит только меру, выходной сигнал которого равен
аналоговому Y2 .
Работать СИ могут в двух режимах: статическом и динамическом.
Статический режим — это такой режим работы СИ, при котором
изменением измеряемой величины за время, требуемое для проведений
одного измерения, можно пренебречь. В динамическом режиме такое
пренебрежение недопустимо, поскольку указанное изменение превышает
допустимую погрешность.
2.2 Классификация средств измерений
По уровню автоматизации все СИ делятся на три группы:
− неавтоматические;
− автоматизированные, производящие в автоматическом режиме одну
или часть измерительной операции;
− автоматические, производящие в автоматическом режиме измерения
и все операции, связанные с обработкой их результатов, регистрацией,
передачей данных или выработкой управляющих сигналов.
По уровню стандартизации средства измерений подразделяются на:
− стандартизированные,
изготовленные
в
соответствии
с
требованиями государственного или отраслевого стандарта;
− нестандартизованные (уникальные), предназначенные для решения
специальной измерительной задачи, в стандартизации требований к
которым нет необходимости.
По отношению к измеряемой ФВ средства измерений делятся на:
22
− основные – это СИ той ФВ, значение которого необходимо получить
в соответствии с измерительной задачей;
− вспомогательные – это СИ той ФВ, влияние которой на основное
средство измерений или объект измерения необходимо учесть для
получения результатов измерений требуемой точности.
Классификация средств измерений по их роли в процессе измерения и
выполняемым функциям показана на рис.2.2.
2.2.1. Элементарные средства измерений
Элементарные средства измерений предназначены для реализации
отдельных операций прямого измерения. К ним относятся меры,
устройства равнения и измерительные преобразователи. Каждое из них,
взятое по отдельности, не может осуществить операцию измерения.
Мера
–
это
средство
измерений,
предназначенное
для
воспроизведения и (или) хранения ФВ одного или нескольких размеров,
значения которых выражены в установленных единицах и известны с
необходимой точностью.
Средства измерений
Элементарные
Меры
Устройства
сравнения
(компараторы)
Измерительные
преобразователи
Комплексные
Измерительные
приборы
Измерительные
системы
Измерительные
установки
Однозначные
Первичный
Многозначные
Промежуточный
Наборы мер
Масштабный
Магазины мер
Аналоговый
Установочные
Аналого-цифровой
Регистрирующие
Ввозимые
Цифро-аналоговый
Показывающие
Измерительновычислительные
комплексы
Аналоговые
Цифровые
Встроенные
Рис. 2.2. Классификация средств измерений по их роли в процессе измерения и
выполняемым функциям
Меры подразделяются на следующие типы:
− однозначные, воспроизводящие ФВ одного размера, напр., гиря 1кг;
− многозначные, воспроизводящие ФВ разных размеров, напр.,
конденсатор переменной емкости.
Устройство сравнения (компаратор) – это средство измерений,
дающее возможность сравнивать друг с другом меры однородных величин
или же показания измерительных приборов. Во многих относительно
23
простых СИ роль компаратора выполняют органы чувств человека,
главным образом зрение, например при сравнении отклонения указателя
прибора и числа делений, нанесенных на его шкале.
Измерительный преобразователь - это техническое устройство,
построенное на определенном физическом принципе и выполняющее
одно
частное
измерительное
преобразование,
т.е.
операцию
преобразования входного сигнала X
в выходной Y1, информативный
параметр которого с заданной степенью точности функционально связан с
информативным параметром входного сигнала и с достаточной степенью
точности.
Измерительный преобразователь (ИП) предназначен для выполнения
одного
измерительного
преобразования
(рис.2.3,а).
Важнейшей
характеристикой ИП является функция преобразования (рис.2.3,б) в виде
Отклонения реальной передаточной функции ИП от
Y f ( X , Z1) .
идеальной приводят к возникновению аддитивности, мультипликативной и
нелинейной составляющих погрешности.
Линейный преобразователь – это ИП, имеющий линейную связь между
входной и выходной величинами. Их важной разновидностью является
Реальная
Y
ИП
X
F(X )
Y f ( X , Z1 )
X
Идеальная
Z1
а)
б)
Рис. 2.3. Структурная схема измерительного преобразователя (а) и его функция
преобразования (б)
масштабный ИП, предназначенный для изменения размера величины или
измерительного сигнала в заданное число раз. Его уравнение
преобразования имеет вид Y kX , где X , Y - однородные входная и
выходная величины; k - постоянный коэффициент передачи.
По виду входных и выходных величин ИП делятся на:
− аналоговые, преобразующие одну аналоговую величину в другую
аналоговую величину;
− аналого-цифровые (АЦП), предназначен для преобразования
аналогового измерительного сигнала в цифровой код;
− цифроаналоговые (ЦАП), предназначенные для преобразования
цифрового кода в аналоговую величину.
24
2.2.2. Комплексные средства измерений
Комплексные средства измерений предназначены для реализации всей
процедуры измерения. К ним относятся измерительные приборы и
установки и измерительные системы.
Измерительный прибор – средство измерений, предназначенное для
получения значений измеряемой физической величины в установленном
диапазоне ее измерения и выработки сигнала измерительной
информации,
доступной
для
непосредственного
восприятия
наблюдателем.
Измерительные системы – это совокупность функционально
объединенных средств измерений, средств вычислительной техники и
вспомогательных устройств, соединенных между собой каналами связи,
предназначенных для выработки сигналов измерительной информации о
физических величинах, свойственных данному объекту, в форме, удобной
для автоматической обработки, передачи и (или) использования в
автоматических
системах
управления.
Рассмотрим
подробнее
классификацию информационно-измерительных систем.
2.2.3. Информационно-измерительные системы
Информационно-измерительные системы (ИИС) — это совокупность
технических средств, выполненных в блочно-модульном исполнении,
объединенных общим алгоритмом функционирования, обладающих
набором нормированных метрологических характеристик и предназначенных для автоматического (автоматизированного) получения
информации непосредственно от объекта, преобразования ее, передачи,
измерения, обработки, хранения и представления в форме, доступной для
восприятия оператором и (или) ввода в управляющую систему.
ИИС позволяет осуществлять:
− непосредственную связь с объектом исследования;
− обработку измерительной информации;
− централизованное
автоматическое
(автоматизированное)
управление;
− многоканальные измерения различных физических величин.
Эти наиболее характерные признаки в комплексе присущи только
измерительной системе.
В зависимости от выполняемых функций ИИС классифицируются по
назначению на измерительные; автоматического контроля; технической
диагностики; идентификации.
Измерительные ИИС, выполняющие прямые, косвенные, совокупные
измерения с соответствующей математической обработкой и выдачей
численного значения физической величины (телеизмерительные ИИС,
если исследуемый объект находится на очень большом расстоянии);
ИИС автоматического контроля, предназначенные для установления
соответствия между состоянием (свойством) объекта контроля и заданной
нормой, определяющей качественно различные области его состояния. В
25
результате система контроля выдает информацию о состоянии объекта
контроля и об отклонениях от заданной нормы.
ИИС технической диагностики, дающие информацию о неисправностях
и повреждениях какой-либо системы, на основании которой решается
задача отыскания места повреждений и установления причин этих
повреждений и неисправностей; выявления элементов, послуживших
причиной
неправильного
функционирования
и
восстановления
нормальной работы объекта.
ИИС идентификации (распознавания образов) предназначены для
установления соответствия между объектом и заданным образом. Так же
как и норма при контроле, при опознании образ может быть задан в виде
образцового изделия или в виде перечня определенных свойств и
значений параметров (признаков) с указанием полей допуска.
Структурную схему ИИС можно представить в виде совокупности (рис.
2.4) связанных между собой функциональных блоков. К ним относят,
первичные преобразователи (ПП), размещены в определенных точках
пространства.
В
качестве
первичных
преобразователей
могут
использоваться
резистивные,
емкостные,
индуктивные,
термоэлектрические, интегральные, голографические, телевизионные,
рентгенографические ИП.
ПП
ОИ
ПП
Аналого
вые
преобра
зователи
ИФУ
АЦП
Цифров
ые
устройс
тва
ЦАП
ИФУ
ИФУ
ИФУ
ПП
ИУ
ИФУ
Система шин
УУ
Рис. 2.4. Обобщенная структурная схема ИИС
Аналоговыми
преобразователями
являются
нормирующие
преобразователи аналоговых сигналов (масштабные преобразователи,
преобразователи различного вида модуляции сигнала). Подробно
первичные преобразователи рассматриваются в лекции 3.
Функциональные блоки могут соединяться между собой через
стандартные интерфейсы, технические средства которых содержат
26
системы шин, интерфейсных узлов (ИФУ) и устройств управления (УУ).
Устройство управления принимает информацию от ПП, подает команды на
исполнительные устройства (ИУ) для формирования воздействия на
объект исследования (ОИ) в виде электрических, механических, тепловых,
оптических, акустический и других величин.
Разнообразие требований к ИИС и условий их эксплуатации привели к
необходимости иметь различные ИИС по назначению, характеристикам, а
следовательно,
по
существенно
различающимся
структурам,
функциональным схемам, основным блокам, средствам измерения,
автоматизации и алгоритму работы. Существенно расширяется
применение
устройств
памяти,
широко
используются
наборы
функциональных устройств, объединяемых стандартными интерфейсами.
Большое значение приобретают диалоговые режимы работы оператора с
ИИС; измерительные, контрольные и другие работы.
Интерфейс — система сопряжения между составляющими частями
(подсистемами) системы обработки данных, включающая в себя
аппаратные средства, линии связи (шины), протокол (совокупность правил,
устанавливающих единые принципы взаимодействия подсистем) и
программное обеспечение процесса обмена информацией.
Система КАМАК (САМАС — Computer Applications for Measurement and
Control)
рекомендована
к
использованию
Международной
электротехнической
комиссией.
КАМАК
—
это
стандартная
однопроцессорная
модульная
система,
удовлетворяющая
международным требованиям, в которой измерительные и управляющие
системы создают путем установки соответствующих вставных модулей в
стандартные секции.
Интерфейс КАМАК предусматривает возможность построения систем с
двумя и более уровнями централизации; раздельные системы шин для
информационных и управляющих потоков; магистральную систему шин,
работающую
совместно
с
несколькими
радиальными
шинами,
связывающими все блоки управления, параллельный порядок выполнения
операций обмена информацией; объединение активных блоков
приемник— источник; синхронный обмен информацией; работу с любой
ЭВМ; унификацию конструкции; унификацию питания.
В ИФУ КАМАК унифицированы 86-контактные разъемы и соединение
всех шин с контактами разъемов. К достоинствам ИФУ КАМАК можно
отнести модульную структуру, приспособленную к гибкому построению и
относительно несложному изменению состава системы к широкой
кооперации в производстве устройств ИФУ, высокую пропускную
способность,
строго
формализованную
организацию
обмена
информацией. С другими стандартными интерфейсами можно
ознакомиться в дополнительной литературе [7].
2.2.4. Измерительно-вычислительные комплексы
Системы,
содержащие
программно-управляемые
цифровые
вычислительные средства (микропроцессоры, малые ЭВМ), обладают
27
определенной универсальностью и при соответствующем программном
обеспечении могут выполнять функции систем различного назначения.
Измерительные системы, содержащие такие вычислительные
средства,
называют
измерительно-вычислительными
(ИВС).
Универсальное ядро ИВС называют измерительно-вычислительным
комплексом (ИВК).
Измерительно-вычислительный комплекс — автоматизированные
средства измерения и обработки информации, предназначенные для
исследования сложных объектов и представляющие собой совокупность
программно-управляемых средств (измерительных и вычислительных) и
средств воздействия на объект исследования.
Измерительно-вычислительные комплексы, производимые серийно,
проходят государственные контрольные испытания и аттестацию.
2.3. Системы видеонаблюдения
Телекамера
…
...
Телекамера
ПЭВМ
Блок
коммутации
Телевизионные системы сбора и регистрации информации на ж.-д.
транспорте [21] применяются для обзора сортировочных станций и
пассажирских платформ, территорий вокзала, переездов, контейнерных
площадок; для коммерческого осмотра поездов; для наблюдения за
экипировкой локомотивов и проверки прибытия поезда в полном составе.
Телевизионные установки (рис.2.5) в упрощенном виде содержат
несколько передающих камер и дистанционное управление (фокусировка,
диафрагмирование, поворот и наклон камеры и пр.). Рассмотрим,
например, блок схему устройства считывания номеров единиц подвижного
состава с помощью видеокамер (рис.2.6).
ЛС
ЛБ
по видеосигналу
ЛС
ПУ
ВУ
Видеомагнитофон
Рис. 2.5. Упрощенная структурная схема систем видеонаблюдения
28
ЧМ
камера
КЗ
БУ
БАР
Н
ЧД
КВ
БУ
поз
БСРЗ
АЦП
БИС
ВУ
ВМ
Рис. 2.6. Блок-схема устройства считывания номеров единиц
подвижного состава с помощью видеокамер
Устройство (рис.2.6.) работает следующим образом. Видеосигнал с
импульсной телекамеры по кабельной линии связи поступает в блок
управления БУ на усилитель и селектор, выделяющий синхросигналы из
телевизионного сигнала. Синхросигналы, усиливаясь, передаются в блок
автоматического регулирования скорости вращения магнитного диска БАР
и делителя частоты. С выхода делителя частоты кадровые
синхроимпульсы поступают на блок синхронизации разрешения записи и
позиционирования БСРЗ.
При «записи» видеосигнал поступает на видеоконтрольное устройство
ВУ, аналого-цифровой преобразователь АЦП и частотный модулятор ЧМ.
Телевизионный сигнал от ЧМ поступает в канал записи КЗ и записывается
на магнитный диск. Видеомагнитофон ВМ производит запись
телевизионного сигнала. При «чтении» частотно-модулированный сигнал
считывается с магнитного диска, усиливается в канале воспроизведения
КВ накопителя Н и поступает на частотный демодулятор ЧД и через БУ
включается ВУ. Разрешение записи управляется с помощью блока
управления позиционированием видеоголовок «БУпоз».
2.4. Заключение
Ввиду ограничения объема конспекта лекций были рассмотрены не все
вопросы, касающиеся технического обеспечения ССИ. Сопряжение
компьютеров и микропроцессорных устройств с датчиками, построение
информационных систем на базе агрегатных комплексов, техническое
исполнение и характеристики преобразователей будут рассмотрены
отдельно в специальном методическом пособии.
29
ЛЕКЦИЯ 3. КЛАССИФИКАЦИЯ И РАЗНОВИДНОСТИ ДАТЧИКОВ
3.1. Преобразование измеряемой величины в процессе измерений
Если проанализировать известные процессы измерений, то в
подавляющем большинстве числовое значение измеряемой величины
получается, только после того, как тем или иным способом видоизменим
ее.
Рассмотрим в качестве примера массу тела, которую мы измеряем с
помощью обыкновенных равноплечих весов. Под действием земного
притяжения создаются силы. Масса тела вместе с этими силами давит на
одну чашку, а масса гирь – на другую. Подбирая гири, мы добиваемся,
равновесия массе гирь, принимая, что сила земного притяжения на
расстоянии между чашками остается одной и той же. Как видим, для
измерения массы нам пришлось преобразовать массы тела и гирь в силы,
а для сравнения сил между собой преобразовать их действие в
механическое перемещение рычагов весов.
Другой пример – измерение давления газа при помощи трубчатого
манометра. Металлическая трубка манометра, изогнутая по дуге, одним
концом соединяется с резервуаром, в котором необходимо измерить
давление газа. Другой конец трубки запаян. Под действием давления газа
трубка разгибается и тем больше, чем больше давление. Свободный
конец трубки перемещается в пространстве. Так осуществляется первая
ступень преобразования. Перемещение конца при помощи системы
рычагов и зубчаток преобразуется во вращение оси (вторая ступень
преобразования). На оси находится стрелка, конец которой перемещается
по дуге над шкалой с делениями. Эта третья ступень преобразования,
позволяющая получить числовое значение измеряемого давления.
Приведенные примеры показывают, что даже простые измерения
проводятся путем преобразования измеряемой величины. Для этого
преобразования используются различные первичные преобразователи.
В автоматических устройствах широко используют электрическую
энергию, обладающую рядом преимуществ по сравнению с другими
видами энергии, такими как: простота передачи на большие расстояния,
возможность аккумулирования и т. д. В то же время
величины,
характеризующие большинство процессов на транспорте, неэлектрические
— скорость, перемещение, температура, давление и т. д. В связи с
этим
часто
возникает
задача
преобразования
разнообразных
неэлектрических величин в электрические сигналы, изменяющиеся в
соответствии с изменением неэлектрических величии. Элементы,
осуществляющие указанную задачу,
называют датчиками (или
преобразователями).
30
Электрические датчики, преобразующие неэлектрические входные
величины в электродвижущую силу или напряжение, называют
генераторными (активными) датчиками. Эти датчики не требуют
постороннего источника питания. Датчики, в которых изменение
неэлектрической величины сопровождается соответствующим изменением
того или иного электрического параметра (индуктивности, емкости,
сопротивления),
называют
параметрическими
(пассивными).
Параметрические датчики получают энергию от вспомогательного
источника.
К датчикам предъявляют следующие требования: непрерывность и
линейность статической характеристики, высокая чувствительность,
низкая инерционность, высокая надежность, минимальная стоимость,
габаритные размеры и масса.
3.2. Область применения датчиков на ж.–д. транспорте
На отечественных и зарубежных железных дорогах датчики [44]
применяют в системах:
− полуавтоматической и автоматической блокировки (ПАБ, АБ) для
контроля занятости перегона и блок– участков;
− автоматической локомотивной сигнализации(АЛС), автоматического
регулирования скорости и автоматического управления тормозами (САУТ)
для получения информации о фактической скорости и местонахождении
поездов;
− переездной сигнализации (ПС) и ограждающих устройствах для сигнализации о приближении поезда, контроля скорости приближения и
движения подвижного состава;
− горочной автоматизации (ГАЦ, АРС) для определения скоростей и
ускорений отцепов для управления тормозными средствами, а также для
контроля свободности стрелочных участков и измерения веса отцепов;
− обнаружения перегревшихся букс (ПОНАБ), наличия ползунов на
колесах в проходящих поездах для определения нарушения нормальных
условий эксплуатации и регистрации числа осей, проходящих через
контрольную точку;
− в измерительных вагон- лабораториях;
Рассмотрим наиболее распространенные типы датчиков.
3.3. Типы датчиков
3.3.1. Емкостные датчики
Емкостным датчиком называют такие датчики, в которых измеряемая
величина преобразуется в значение емкости непосредственно или при
механических
перемещениях.
Известно,
что
емкость
плоского
31
конденсатора C пропорциональна диэлектрической проницаемости среды
и рабочей площади пластин S и обратно пропорционально расстоянию
между ними :
C
1
S
,
4
(3.1)
где - относительная диэлектрическая проницаемость среды между
обкладками; S - активная площадь обкладок; - расстояние между
обкладками.
Принцип действия емкостных датчиков основан на изменении одной из
величин , S , . Как правило, емкостные датчики включают в мостовые
схемы переменного тока или колебательные контуры высокочастотных
генераторов. Характерные области применения емкостных датчиков –
измерения механических перемещений (емкостные микрометры),
измерения уровней, измерения давлений и т.д.
Существуют
различные типы емкостных преобразователей. Это
может быть преобразователь, представляющий собой конденсатор,
одна пластина которого перемещается относительно другой так, что
изменяется расстояние между пластинами. Функция преобразования
C f нелинейная, причем чувствительность возрастает с
уменьшением . Минимальное значение определяется напряжением
пробоя конденсатора. Такие преобразователи используются для
измерения малых перемещений (менее 1 мм).
Применяют также дифференциальный емкостный преобразователь, в
котором при перемещении центральной пластины емкость одного
конденсатора увеличивается, а другого уменьшается. Дифференциальная
конструкция позволяет уменьшить погрешность нелинейности или
увеличить рабочий диапазон перемещений.
Возможно использование емкостного преобразователя для измерения уровня жидкости. Емкость между электродами зависит от уровня
жидкости, так как диэлектрическая проницаемость контролируемой
жидкости отличается от диэлектрической проницаемости воздуха.
Емкостные преобразователи обычно питаются током повышенной
частоты (до десятков мегагерц), что позволяет увеличить мощность
выходного сигнала и снизить шунтирующее действие сопротивления
изоляции. Емкостные преобразователи просты по конструкции, имеют
высокую чувствительность и относительно малую инерционность. К их недостаткам следует отнести влияние внешних электрических полей, паразитных емкостей, температуры, влажности.
3.3.2. Индуктивные датчики
Принцип действия индуктивных преобразователей основан на
зависимости индуктивности или взаимной индуктивности обмоток от
32
положения, геометрических размеров и магнитного состояния элементов
их магнитной цепи.
Индуктивности и взаимные индуктивности обмоток, расположенных на
магнитопроводе,
при
отсутствии
рассеяния
магнитного
потока
определяются формулами
Li
i2
ZM
Mi j
где i и j - число витков i -й и
магнитное
сопротивление,
,
(3.2)
i j
ZM
,
(3.3)
2
2
j -й обмоток; Z M RM
XM
-
- активная
S
S
k 1 0 k k
0
сопротивления, здесь k , S k , k где
n
RM
k
составляющая магнитного
соответственно длина, площадь поперечного сечения и относительная
магнитная проницаемость k -го участка магнитопровода; 0 - магнитная
проницаемость пустоты; - длина воздушного зазора; S - площадь
поперечного сечения воздушного участка магнитопровода; X M
P
2
-
реактивная составляющая магнитного сопротивления, здесь P - потери в
магнитопроводе на частоте , обусловленные вихревыми токами и
гистерезисом; - магнитный поток в магнитопроводе.
Из приведенных формул следует, что индуктивность и взаимную
индуктивность можно изменять, воздействуя на длину или площадь
поперечного сечения воздушного участка магнитной цепи, на магнитную
проницаемость или на потери в магнитопроводе.
Некоторые типы индуктивных преобразователей схематически
показаны на рис.3.1.
1
2
x
x
3
x
a)
б)
в)
33
x
F
x
г)
д)
ж)
x
е)
Рис.3.1. Индуктивные преобразователи
Индуктивный преобразователь (рис.3.1,а) с переменной длиной
воздушного зазора
характеризуется нелинейной (близкой к
гиперболической) зависимостью с перемещением 0,01 —10 мм.
Преобразователь с изменяющейся площадью воздушного зазора
позволяют измерять перемещения до 15—20 мм (рис.3.1,б).
Преобразователь с разомкнутой магнитной цепью применяется для
измерения
перемещений от 1мм до 100 мм (рис.3.1,г). Широкое
распространение
на
практике
получили
дифференциальные
преобразователи, в которых перемещение подвижного элемента
вызывает увеличение индуктивности одной обмотки и уменьшение
индуктивности другой (рис.3.1,д,е.).
Индукционные преобразователи применяются для измерений скорости линейных и угловых перемещений. Наибольшее применение они
получили в приборах для измерения угловой скорости (тахометрах) и в
приборах для измерения параметров вибраций, т. е. для измерения
линейных и угловых перемещений и ускорений (в виброметрах и акселерометрах).
3.3.3. Датчики пути и скорости
Датчик используют, напр., в системы автоматического управления
тормозами (САУТ) и устанавливают в корпус скоростемера на буксе
колесной пары. Он содержит в качестве основного элемента
транзисторный автогенератор с задающим LC-контуром и ротор,
выполненный из стальной шестерни, которая имеет 16 импульсов. При
введении в зазор между базовой и коллекторными обмотками
автогенератора металлической пластины уменьшается коэффициент
обратной связи, вызывающий срыв генерации.
Ротор датчика приводится во вращение от шейки оси колесной пары.
Каждый зубец при вращении ротора выполняет функцию металлической
пластинки. За каждый оборот колесной пары датчик выдает 16 импульсов.
34
Таким
образом,
число
импульсов,
выработанных
датчиком,
пропорционально пройденному пути, а их частота – скорости движения.
Коэффициент пропорциональности определяется диаметром колеса.
Другой разновидностью датчика скорости используют в системе
автоматического
регулирования
скорости
на
метрополитене
и
высокоскоростном наземном транспорте. Основными частями такого
датчика являются два постоянных магнита, сердечник и обмотка.
Зубчатый ротор вращается вместе с колесной парой. Датчик
устанавливают на специальной крышке буксы подвижного состава.
Магнитный поток постоянных магнитов замыкается через зубья ротора и
при вращении колеса за счет изменения магнитного потока в сердечнике в
обмотке наводится ЭДС, частота которой пропорциональна скорости
вращения колеса, т.е. скорости движения поезда. Таким образом, датчик
скорости преобразует скорость движения поезда в частоту электрических
сигналов.
Датчик пути решает задачу измерения скорости вращения оси колесной
тележки путём фотоэлектрического преобразования сигнала прерываний
светового потока щелевой маски (диском с радиальными прорезями),
усиления и порогового формирования электрических сигналов импульсов.
3.3.4. Датчики контроля проследования поезда
В контактных датчиках измеряемому механическому перемещению
соответствует замкнутое или разомкнутое состояние контактов,
управляющих электрической цепью. Их применяют в системах
автоматического контроля, сортировки деталей по размерам и
автоматической сигнализации.
В системах ЖАТ распространение получили контактные датчики,
выполняющие функции контроля проследования подвижного состава и
называемые рельсовыми педалями, а так же путевые датчики весомера.
Педали выдают электрический сигнал при срабатывании контактов их
выходных
элементов
в
результате
воздействия
колеса
на
воспринимающий пружинно-рычажный механизм датчика [5].
Примером может служить педаль рельсовая, состоящая из корпуса,
который крепят на бетонном основании, контактной схемы с выводами,
предохранительного кожуха и прихвата на рельсе, соединенном
посредством рычага с осью. Когда колесо въезжает в зону действия
педали и рельс просаживается на глубину 0,8 мм и более, рычаг
поворачивает ось с коромыслом, переключая контакты педали и
возвращая их в исходное положение при выходе колеса из этой зоны.
Действие мембранной педали основано на передаче давления от
прогиба рельса под подвижным составом через нажимное приспособление
на сжимаемую воздушную камеру, расположенную под рельсом, и
воздействия вытесняемого из этой камеры воздуха на мембрану, с
которой связана контактная схема.
35
Рассмотренные контактные датчики применяют для счета осей
подвижного состава только в ограниченном диапазоне нагрузок на ось и
скоростей подвижного состава. Вне этих пределов педали не фиксируют
группу проходящих осей или не выделяют отдельные оси.
Магнитоэлектронный датчик применяют в устройствах реверсивного
счета осей на пути. Датчик работает в диапазоне скоростей 0-200 км/ч. По
принципу действия он близок к рассмотренному выше датчику пути и
скорости и описан в лекции 7.
3.3.5. Потенциометрические датчики
Для
преобразования
угловых
или
линейных
механических
перемещений в соответствующие изменения сопротивления, напряжения
или тока служит потенциометрический датчик, который представляет
собой резистор, включенный по схеме потенциометра.
На каркасе из изоляционного материала размещена обмотка. По
кромке провода обмотки перемещается контакт щетки, приводимой во
вращение осью. Движок соединяет контакт щетки с щеткой токосъемного
кольца. Ось вращения и движок электрически изолированы друг от друга.
Напряжение питания подается на зажимы потенциометра, выходное
напряжение снимается между одним из зажимов, на которые подается
питание, и контактом, соединенных с токосъемным кольцом.
Элемент, угловое перемещение которого нужно преобразовать,
механически связывается с осью, положение которой определяет
сопротивление, а следовательно, выходное напряжение и ток в нагрузке. В
качестве нагрузки Rн может быть использован электроизмерительный
прибор, например вольтметр, отградуированный в значениях угловых
перемещений. Статическая характеристика потенциометрического датчика
показывает зависимость выходного напряжения от контролируемого угла
поворота подвижного контакта щетки в режиме холостого хода и при
наличии нагрузки. Обычно стремятся к реализации линейной статической
характеристики. Для этого необходимо выполнить соотношение Rн R ,
где R – сопротивление потенциометра.
Потенциометрические датчики используют на тепловозах в качестве
датчиков давления масла. Под давлением масла мембрана,
воздействующая на шток, рычажную передачу и далее подвижной контакт
потенциометра, прогибается.
Реостатные преобразователи с проволочной обмоткой являются ступенчатыми (дискретными) преобразователями, поскольку непрерывному
изменению перемещения соответствует дискретное изменение сопротивления. Дискретный характер выходной величины определяет возникновение
соответствующей
погрешности
дискретизации,
которая
уменьшается с увеличением числа витков обмотки. Поэтому реостатные
преобразователи обычно имеют не меньше 100—200 витков обмотки.
36
Указанная погрешность дискретизаций отсутствует в реохордных
преобразователях, в которых щетка скользит вдоль оси калиброванной
проволоки.
3.3.6. Гальванический преобразователь
Гальванические преобразователи основаны на зависимости ЭДС
гальванической цепи от концентрации ионов в электролите и окислительно-восстановительных процессов, происходящих на электродах [7,
35]. Наиболее широко гальванические преобразователи используются в
качестве приборов для измерения активности (концентрации) водородных
ионов. Они основаны на свойствах различных растворов (нейтральных,
кислых, щелочных), которые зависят от концентрации в них водородных
ионов.
Гальванический преобразователь состоит из двух элементов:
измерительного электрода, помещенного в исследуемый раствор, и вспомогательного элемента, электродный потенциал которого должен
оставаться
постоянным.
Измерение
ЭДС
гальванических
преобразователей должно производиться таким образом, чтобы через
преобразователь не проходил ток, вызывающий погрешности от
поляризации электродов и падения напряжения на внутреннем
сопротивлении
преобразователя,
которое
при
использовании
7
9
стеклянных электродов составляет 10 -10 Ом. Указанное требование
делает необходимым применение электрометрических усилителей или
компенсационных измерительных приборов. Следует также учитывать, что
измерение давления с помощью гальванических преобразователей
требует введения поправки на температуру.
3.3.7. Термоэлектрические преобразователи
Термоэлектрические преобразователи (термопары) [7] основаны на
термоэлектрическом эффекте, заключающемся в том, что в замкнутом
контуре, состоящем
из двух разнородных
проводников
(или
полупроводников), течет ток, если места спаев проводников имеют
различные температуры.
Если взять замкнутый контур, состоящий из разнородных проводников
(термоэлектродов), то на их спаях и возникнут термо-ЭДС eAB t и
e AB t0 , зависящие от температур t и t0 этих спаев. Так как эти термоЭДС оказываются включенными встречно, то результирующая термоЭДС E AB t , t0 , действующая в контуре, равна
E AB t , t0 eAB t eAB t0 .
(3.4)
37
При равенстве температур обоих спаев результирующая термо-ЭДС
равна пулю. Спай, погружаемый в контролируемую среду, называется
рабочим концом термопары, а другой - свободным.
3.3.8. Оптические датчики
В качестве приемных элементов в оптических датчиках используют
фоторезисторы,
фотодиоды
и
фототранзисторы.
Действие
фототранзисторов основано на явлении внутреннего фотоэффекта,
состоящего в том, что в результате поглощения света в полупроводнике
фоторезистора появляются свободные электроны. Под действием
приложенного напряжения первичные электроны приходят в движение и
сталкиваются
с
атомами
кристаллической
решетки,
вызывая
дополнительный вторичный поток электронов. Таким образом, при
освещении фоторезистора его проводимость резко увеличивается, что
приводит к увеличению тока I н в цепи нагрузки. Изменение интенсивности
излучение влияет на их сопротивление в непроводящем направлении. В
фоторезисторах светом излучается базовая область. При этом действие
светового потока (подобно действию напряжения, прикладываемого между
базой и эмиттером в обычном транзисторе) приводит к увеличению тока
эмиттера и соответственно выходного тока коллектора.
Оптические датчики используют в СЖАТ на метрополитене для
контроля скорости движения поездов в районе остановочных платформ; в
устройствах пассажирской автоматики (турникетах); в устройствах
контроля прохода в тоннель и пр. На сортировочных горках оптические
датчики
контролируют
свободность
стрелочных
участков
при
проследовании длиннобазных вагонов.
В системах, предназначенных для автоматического обнаружения
перегретых букс подвижного состава (ПОНАБ), применяют датчики,
реагирующие на инфракрасное излучение от корпусов греющихся букс.
Они называются болометрами. Эти датчики преобразуют инфракрасное
излучение от нагретых букс в электрические сигналы. Приемные
устройства срабатывают при достижении температуры шеек осей
колесных пар определенного значения, зависящего от настройки прибора.
В сочетании с рельсовыми педалями система ПОНАБ контролирует
наличие нагретых букс и определяет их порядковый номер.
Оптоэлектрические преобразователи используются для бесконтактных
измерений разнообразных физических величин. Чаще всего под
действием измеряемой величины изменяется интенсивность излучения,
например, вследствие изменения температуры излучателя, изменения
поглощения или рассеяния оптического канала, однако могут изменяться
также фазовый сдвиг между колебаниями в двух лучах, вызываемый
разностью оптического хода этих лучей, частота и длина волны
излучения, генерируемого источником.
38
В преобразователях излучений выходная электрическая величина
функционально связана с характеристиками излучения. В зависимости от
вида излучения различают оптоэлектрические и ионизационные
преобразователи.
В оптоэлектрических преобразователях используется оптическое
излучение видимого, инфракрасного или ультрафиолетового диапазона.
Источниками излучения могут служить лампы накаливания, газоразрядные лампы, светодиоды и лазеры. В качестве приемников излучения
чаще всего применяют фотоэлементы, фотоумножители, фоторезисторы,
фотодиоды и фототранзисторы. Следует отметить, что фотоэлементы
являются генераторными преобразователями, а фотодиоды могут быть
генераторными или параметрическими преобразователями.
Оптоэлектрический преобразователь измеряемой величины x1 или
x2 в выходную электрическую величину y содержит источник излучения
ИИ потока Ф1, некоторый оптический
канал ОК и
приемник
излучения ПИ, воспринимающий поток и преобразующий его в
электрическую величину y (рис.3.2).
ИИ
x1
Ф1
ОК
Ф2
ПИ
y
x2
Рис.3.2. Структурная схема оптоэлектрического преобразователя
Воздействие измеряемой величины на поток излучения Ф2 может
осуществляться двумя путями. В первом случае измеряемая величина x1
воздействует непосредственно на источник излучения и изменяет тот или
иной параметр излучаемого потока Ф1. Во втором случае измеряемая
величина x2 модулирует соответствующий параметр потока Ф2 в
процессе его распространения по оптическому каналу.
3.3.9.Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи основаны на использовании
прямого пьезоэлектрического эффекта, заключающегося в появлении
электрических зарядов на поверхности некоторых кристаллов (кварца,
сёгнетовой соли и др.) под влиянием механических напряжений. Это
преобразователи генераторного типа, однако, их выходная мощность
мала, поэтому к выходу преобразователя должен быть подключен измерительный усилитель с возможно большим входным сопротивлением
(1011Ом и более).
39
В пьезоэлектрических преобразователях применяют главным образом кварц, который обладает высокой
механической
прочностью
и очень слабой зависимостью параметров от температуры.
3.3.10. Тензочувствительные преобразователи (тензорезисторы)
Принцип
действия
термопреобразователей
сопротивления
(терморезисторов) основан на зависимости электрического сопротивления
проводников и полупроводников от температуры. В основе работы
тензорезисторов [7] лежит явление тензоэффекта, заключающееся в
изменении сопротивления резисторов, выполненных из проводников или
полупроводников, при их механической деформации.
Характеристикой тензоэффекта материала является коэффициент
относительной тензочувствительности
k
где R
R
R
R
,
(3.5)
- относительное изменение сопротивления резистора;
- относительное изменение линейного размера резистора.
В настоящее время наиболее широко используются наклеиваемые
тензопреобразователи (рис.3.3).
1
2
3
Рис. 3.3. Тензочувствительный преобразователь
Преобразователь представляет собой тонкую зигзагообразно
уложенную и приклеенную к полоске бумаги (подложке 1) проволоку 2
(проволочную решетку). Преобразователь включается в схему с
помощью
привариваемых
или
припаиваемых
выводов
3.
Преобразователь наклеивается на поверхность исследуемой детали
так, чтобы направление ожидаемой деформации совпадало с продольной
осью решетки.
Для изготовления преобразователей применяется главным образом
проволока диаметром 0,02—0,05 мм из константана, имеющего
коэффициент k 1,9 2,1. Применяются также фольговые и пленочные
тензорезисторы, габаритные размеры которых меньше габаритных
размеров проволочных тензорезисторов.
Изменение температуры
вызывает
изменение функции
преобразования тензорезисторов, что объясняется температурной
40
зависимостью
сопротивления
преобразователя
и
различием
температурных коэффициентов линейного расширения материала
тензорезистора и исследуемой детали.
Влияние температуры
устраняется обычно путем применения соответствующих методов
температурной компенсации.
Для измерения выходной величины тензорезисторного преобразователя чаще всего применяют мостовые схемы. Тензорезисторы всех
типов находят широкое применение для измерения деформаций, усилий,
давлений, моментов и т. п.
Широкое распространение на практике получили более дешевые
медные терморезисторы, имеющие линейную зависимость сопротивления
от температуры:
Rt R0 1 t , при 50 t 180 ,
(3.6)
1
где 4,26 10 3 C
Недостатком меди является небольшое ее удельное сопротивление и
легкая окисляемость при высоких температурах, вследствие чего
конечный предел применения медных термометров сопротивления
ограничивается
температурой
180 C .
По
стабильности
и
воспроизводимости характеристик медные терморезисторы уступают
платиновым.
Стандартные платиновые термометры сопротивления имеют обозначение ТСП, а медные ТСМ. При температуре 0 C сопротивления R0
термометров равно: платиновых 1; 5; 1О; 50; 100; 500 Ом, медных 10, 50,
100 Ом.
По сравнению с металлическими тензорезисторами более высокой
чувствительностью
обладают
полупроводниковые
терморезисторы
(термитсоры). Они имеют отрицательный температурный коэффициент
сопротивления,
значение
которого
при
20 C
составляет
2 8 10 2 C
1
, т. е. на порядок больше, чем у меди и платины.
Полупроводниковые терморезисторы при весьма малых размерах имеют
высокие значения сопротивления (до 1МОм).
Для
измерения
температуры
наиболее
распространены
полупроводниковые терморезисторы типов КМТ (смесь окислов кобальта и
марганца) и ММТ (смесь окислов меди и марганца).
Термисторы имеют нелинейную функцию преобразования, которая
достаточно хорошо описывается формулой
Rt Ae B / T ,
(3.7)
41
где T - абсолютная температура; A - коэффициент, имеющий
размерность сопротивления; B - коэффициент, имеющий размерность
температуры.
Кроме
нелинейности
функции
преобразования,
недостатком
термисторов является плохая воспроизводимость характеристик, т.е.
значительное отличие характеристик одного экземпляра от другого.
3.4. Заключение
В современных ИИС используется большое количество разнообразных первичных измерительных преобразователей. Они различаются и
по физическим принципам работы, и по видам естественных выходных
сигналов, так и по их динамическим диапазонам и мощностям.
Для согласования первичного преобразователя с устройствами системы его выходной сигнал должен быть унифицирован, т. е. отвечать
некоторым требованиям по уровню, мощности, виду носителя информации и т. д., которые определяются соответствующими стандартами.
ЛЕКЦИЯ 4. МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ СБОРА
ИНФОРМАЦИИ
4.1. Метрологическое обеспечение железнодорожных объектов
Метрологическая деятельность, являясь неотъемлемой частью технологических процессов, представляет реальный инструмент управления и
контроля качества эксплуатации и ремонта технических средств. Это связано в первую очередь с тем, что измерения обеспечивают получение количественной информации об объекте управления или контроля, без которой невозможно точное воспроизведение всех заданных условий ТП, обеспечение высокого качества изделий и эффективного управления объектом.
О важности измерительной информации на транспорте свидетельствует то, что до 25% рабочего времени работников предприятий вагонного,
локомотивного хозяйства, СЦБ и связи, пути, электроснабжения уходит на
контрольно-измерительные операции. Поэтому метрологическое обеспечение и стандартизация как система управления качеством измерений –
важное звено в обеспечении эффективности работы транспорта.
В настоящее время выполнение работ по обеспечению единства и требуемой точности измерений, метрологическому контролю и надзору за состоянием и применением ССИ, соблюдение метрологических правил и
норм, нормативных документов, по обеспечению измерений на федеральном железнодорожном транспорте возложено на метрологическую службу
МПС России [34]. Структурная схема метрологической службы представлена на рис. 4.1.
42
Государственные метрологические
центры и территориальные органы
госстандарта России
Главный инженер дороги
Главный инженер дороги начальник ДЦСМ
Дорожный центр
стандартизации и метроогии
Службы, дерекции, отделения
дороги, самостоятельные отделы
Главный инженер (первый замиститель)
Метрогол службы, дирекции, самостоятельного
отдела, главный метролог отделения дороги
Аккредетивные опорные дорожные
лаборатории, лаборатории
отделений, подведомственных
подразделени метрологической
службы дороги
Электрическая лаборатория
Лаборатория автоматики,
телемеханики и связи (ШЛ)
Лаборатория средств
неразрушающего контроля
Производственные лаборатории
по контролю за вредными
сбросами в окружающую среду
Химико-бактериалогические
лаборатории
Химико-технические лаборатории
Подразделения
железной дороги
Главный инженер
Аккредитованная
метрологическая
служба
Метролог
Калибровочные
подразделения
Подразделения
железной дороги
Главный инженер
Метролог
Рис. 4.1. Структурная схема метрологической службы железнодорожного
транспорта
Метрологическая служба в системе МПС России представляет собой
[34] централизованную систему с развитой структурой. Она включает в себя:
− службу главного метролога в центральном аппарате МПС России;
− головную организацию метрологической службы на железнодорожном транспорте (ГОМС) - Государственное унитарное предприятие – Всероссийский научно-исследовательский институт железнодорожного транспорта (ГУП ВНИИЖТ МПС России);
− базовые организации метрологической службы (по хозяйствам) на
железнодорожном транспорте (БОМС);
− метрологические службы железных дорог, возглавляемые дорожными центрами стандартизации и метрологии (ДЦСМ).
Главные задачи метрологической службы дороги:
43
− обеспечение единства и требуемой точности измерений в целях
повышения безопасности и качества перевозочного процесса, повышение
уровня и техники измерений, улучшение качества выпускаемой продукции,
достоверного учета материальных ценностей;
− внедрение современных методов и СИ, автоматизированного контрольно-измерительного оборудования, измерительных систем, эталонов,
применяемых при поверке средств измерений, ремонте подвижного состава и других технических средств дороги;
− осуществление метрологического контроля и соблюдение метрологических правил и норм, нормативных документов по обеспечению единства измерений;
− развитие, совершенствование и укрепление метрологической
службы (МС) дороги.
Метрологическая служба хозяйства сигнализации и связи (ХСС) и
дороги, структурная схема которой представлена на рис. 4.2, представляет собой централизованную систему (СЦБ), которая включает: службу сигнализации, централизации и блокировки, службу информатизации и связи
(НИС). Функции главного метролога по названным службам возлагаются
на заместителя начальника дорожной лаборатории автоматики, телемеханики и связи (АТиС). Метрологические службы подразделений ХСС, возглавляемые метрологами, подчиняются главному инженеру предприятия.
Работы по обеспечению единства измерений относятся к основным видам
работ, а подразделения МС – к основным производственным или технологическим подразделениям ХСС.
Руководители подразделений ХСС отвечают за соблюдение метрологических правил и норм, направленных на обеспечение единства и требуемой точности измерений, правил проверки, состояние и применение
СИ. Каждое подразделение ХСС разрабатывает свое положение о МС,
применительно к конкретным условиям своей деятельности по обеспечению единства и требуемой точности измерений, метрологическому контролю и надзору в соответствии с Законом Российской Федерации «Об обеспечении единства измерений» и на основе положений о МС
МПС.
44
ХЦСМ
ГЛАВНЫЙ ИНЖЕНЕР ДВЖД
БОМС
ГЛАВНЫЙ МЕТРОЛОГ ДВЖД НАЧАЛЬНИК ДЦСМ
Главный метролог
ГУП ЦСС МПС
ДОРОЖНЫЙ ЦЕНТР
СТАНДАРТИЗАЦИИ И
МЕТРОЛОГИИ (ДЦСМ)
СЛУЖБЫ СИГНАЛИЗАЦИИ,
ЦЕНТРАЛИЗАЦИИ И БЛОКИРОВКИ
СЛУЖБЫ ИНФОРМАТИЗАЦИИ
И СВЯЗИ
ГЛАВНЫЙ ИНЖЕНЕР
ГЛАВНЫЙ ИНЖЕНЕР
ГЛАВНЫЙ МЕТРОЛОГ - заместитель начальника дорожной лаборатории АТиС
АККРЕДИТОВАННАЯ ОПОРНАЯ ЛАБОРАТОРИЯ - Дорожная лаборатории АТиС
ПОДРАЗДЕЛЕНИЯ ХОЗЯЙСТВА
СИГНАЛИЗАЦИИ И СВЯЗИ
ШЧ № 2, 3, 4, 6, 7, 8, 9, 10, 12, 13, 14
ГЛАВНЫЙ ИНЖЕНЕР
МЕТРОЛОГИЧЕСКАЯ СЛУЖБА
МЕТРОЛОГ
Рис. 4.2. Структурная схема метрологической службы хозяйства сигнализации и
связи
Обязанности метрологической службы, дистанции сигнализации, связи
и вычислительной техники (ШЧ):
− проводить единую техническую политику и осуществлять контроль
за проведением работ по обеспечению единства и требуемой точности измерений в цехах дистанции;
− проводить систематический анализ состояния СИ и испытательного
оборудования в ШЧ с целью разработки предложений по совершенствованию метрологического обеспечения производства, ведения паспорта метрологического обеспечения ШЧ;
− составлять планы метрологического обеспечения и укомплектования СИ согласно требованиям регламента технической оснащенности, эталонами, испытательным оборудованием, необходимыми для эксплуатации
и ремонта устройств АТ и С и вычислительной техники;
− вести учет средств измерений, организовывать их обменный фонд;
− проводить метрологический контроль и надзор за состоянием и применением СИ и испытательного оборудования, в цехах дистанций;
45
− составлять и согласовывать с территориальными органами Госстандарта графики поверки эталонов и рабочих СИ, обеспечивать их своевременную доставку и поверку;
− составлять годовые графики метрологической аттестации испытательного оборудования, принимать непосредственное участие в метрологической аттестации испытательного оборудования;
− обеспечивать внедрение ГОСТов, ОСТов и других нормативных документов, регламентирующих нормы точности измерений, методики выполнения измерений, метрологические характеристики СИ, требования к
метрологическому обеспечению предприятия;
− участвовать в анализе причин нарушения технологических режимов, брака, производительного расхода сырья, материалов, энергии
и других потерь, связанных с состоянием СИ, контроля, испытания и
выполнением контрольно-измерительных операций;
− оформлять списание, утилизацию СИ в установленном порядке;
− организовывать работы по повышению квалификации работников,
связанных с метрологическим обеспечением и выполнением измерений;
− участвовать в создании на дистанции справочно-информационного
фонда нормативно-технической документации по метрологии.
4.2. Метрологические характеристики средств измерений
4.2.1. Статические характеристики и параметры средств измерений
Основной характеристикой СИ в статическом режиме является
уравнение преобразования — зависимость информативного параметра
выходного сигнала от информативного параметра его входного сигнала [7,
35]. В общем виде она может быть записана в виде
Y b0 X ,b1,...,bm , S1,..., Sl , 1,...,k FX a0 t , a1, a2 ,..., an , S1,..., Sl ,(4.1)
где F - некоторый функционал, описывающий ряд определенных
математических операций, производимых над входной величиной X .
Различают три вида функции преобразования:
− номинальную F , которая укалывается в нормативно-технической
документации на данный тип СИ. Она устанавливается для
стандартизованных средств измерений массового производства;
− индивидуальную Fи , которая принимается для конкретного
экземпляра СИ и устанавливается путем экспериментальных исследований (индивидуальной градуировки) этого экземпляра при
определенных значениях влияющих величин;
− действительную
Fд , которая совершенным образом (без
погрешностей) отражает зависимость информативного параметра
выходного сигнала конкретного экземпляра СИ от информативного
46
параметра его входного сигнала в тех условиях и в тот момент времени,
когда эта зависимость определяется.
Важной характеристикой СИ является его чувствительность S –
свойство, определяемое отношением изменения Y выходного сигнала Y
к вызывающему его изменению X входного сигнала X . Различают
абсолютную
Y
,
X
(4.2)
Y
,
X / X
(4.3)
S
и относительную чувствительность
S
Наименьшее значение изменения ФВ, начиная с которого может
осуществляться её измерение, называется порогом чувствительности
данного средства измерений.
Существует ряд характеристик и параметров СИ, которые описывают
некоторые их свойства СИ отбирать или отдавать энергию через свои
входные или выходные цепи. Для электрических СИ это прежде всего
входные и выходные сопротивления и емкости.
4.2.2. Динамические характеристики и параметры средств измерений
В статических режимах выходной сигнал СИ в точности соответствует
входному (при условии отсутствия статических погрешностей) и,
следовательно, коэффициент преобразования K равен номинальному
коэффициенту K 0 во всем диапазоне изменения входной величины X t .
Уравнение преобразования соответствует идеальному (безинерционному)
линейному преобразованию. Реальные СИ обладают инерционными
(динамическими)
свойствами,
обусловленными
особенностями
используемых элементов. Это приводит к более сложной зависимости
между входным и выходным сигналами.
Полная динамическая характеристика описывается приятной
математической моделью динамических свойств СИ. В качестве нее
используют: дифференциальные уравнения; переходную, импульсную
переходную,
амплитудно-фазовую
и
амплитудно-частотную
характеристики; совокупность амплитудно-частотной и фазочастотной
характеристик; передаточную функцию.
Наиболее
полно
описывают
динамические
свойства
СИ
дифференциальные уравнения. Общий вид уравнения с нулевыми
начальными условиями:
47
d mY t
d m 1Y t
bm
bm 1
... Y t
m
m 1
dt
dt
d n X t
d n 1X t
Kn
K n 1
... K 0 X t
dt n
dt n 1
,
(4.4)
где b1, K1 - постоянные коэффициенты.
d mY t
d m 1Y t
(4.5)
bm
bm 1
... Y t K 0 X t .
dt m
dt m 1
Переходная характеристика ht - это временная характеристика СИ,
полученная в результате подачи на его вход сигнала в виде единичной
функции заданной амплитуды
X t X m 1t .
(4.6)
Она описывает инерционность СИ, обуславливающую запаздывание и
искажение выходного сигнала относительно входного.
Импульсная переходная характеристика g t - это временная
характеристика СИ, полученная в результате приложения к его входу
сигнала в виде дельта-функции.
t
ht g t d t .
0
В практике измерений получила большое
амплитудно-частотная характеристика (АЧХ)
A G j
Ym
,
X m
(4.7)
распространение
(4.8)
представляющая собой зависящее от круговой частоты отношение
амплитуды выходного сигнала линейного СИ в установившемся режиме к
амплитуде входного синусоидального сигнала.
Фазочастотная характеристика (ФЧХ) - это зависящая от
частоты разность фаз между выходным сигналом и входным
синусоидальным сигналом линейного СИ в установившемся режиме.
4.3. Классификация погрешностей измерений
Погрешности измерений могут быть вызваны различными причинами и
по-разному проявляться в эксперименте. В связи с этим существенно
отличаются и пути уменьшения тех или иных составляющих погрешности.
Все это делает целесообразным классификацию погрешностей по тому
или иному признаку.
Погрешности бывают абсолютные и относительные. Относительная
погрешность измерения обычно выражаете в процентах. Так же как и
48
истинное значение измеряемой величины погрешность измерения не
может быть определена абсолютно точно, поэтому используют
приближенные ее оценки.
При анализе погрешностей средств измерений и выборе способов их
уменьшения весьма важным является разделение погрешностей в
зависимости от значения измеряемой (преобразуемой) величины. По
этому
признаку
погрешности
делятся
на
аддитивные
и
мультипликативные.
Аддитивная погрешность (абсолютная) не зависит от значения
измеряемой величины, а мультипликативная — ему пропорциональна.
Соответственно относительная аддитивная погрешность обратно
пропорциональна значению измеряемой величины, а относительная
мультипликативная — от него не зависит. Аддитивную погрешность
иногда называют погрешностью нуля, а мультипликативную — погрешностью чувствительности. Реально погрешность средства измерений
включает в себя обе указанные составляющие.
Кроме того, номинальная функция преобразования средства
измерений — это в большинстве случаев более простая функция (обычно
линейная), чем градуировочная характеристика. Их различие вызывает
погрешность (погрешность нелинейности), которая в общем случае
является некоторой произвольной функцией значения измеряемой
величины.
Средства измерений могут использоваться в статическом или
динамическом режиме работы. В статическом режиме измеряемая
величина не изменяется во времени, а отсчет выполняется тогда, когда
практически окончены переходные процессы, вызванные подключением
измеряемой величина ко входу средства измерений. В динамическом
режиме измеряемая величина изменяется во времени. В соответствии с
этим различают статическую и динамическую погрешность СИ.
Очевидно, что погрешность средства измерений в динамическом
режиме включает в себя статическую погрешность и погрешность,
обусловленную инерционностью СИ. Последняя погрешность носит
название динамической погрешности средства измерений и определяется
как разность между погрешностью средства измерений в динамическом
режиме и его статической погрешностью, соответствующей значению
величины в данный момент времени.
В зависимости от причин возникновения погрешности подразделяются
на инструментальные, методические и субъективные (личные).
Инструментальная погрешность измерения — погрешность из-за
несовершенства СИ. Эта погрешность в свою очередь обычно
подразделяется на основную погрешность СИ и дополнительную.
Основная погрешность СИ — это погрешность в условиях, принятых
за нормальные, т. е. при нормальных значениях всех величин, влияющих
49
на результат измерения (температуры, влажности, напряжения питания и
т. п.). Дополнительная погрешность возникает при отличии значений
влияющих величин от нормальных. Обычно различают отдельные
составляющие дополнительной погрешности, например температурную
погрешность, погрешность из-за изменения напряжения питания и т. п.
Методическая
погрешность
—
погрешность
измерения
происходящая от несовершенства метода измерений. Эта погрешность
может возникать из-за принципиальных недостатков используемого
метода, из-за неполноты знаний о происходящих при измерении
процессах, из-за неточности применяемых расчетных формул. Если
предел допускаемо инструментальной погрешности СИ нормируется
соответствующими документами, то методическая погрешность может и
должна быть оценена только самим экспериментатором с учетом
конкретных условий эксперимента, что во многих случаях представляет
собой достаточно сложную задачу.
Субъективная,
или
личная,
погрешность
обусловлена
индивидуальными особенностями лица, выполняющего измерения.
Примерами таких погрешностей являются погрешности напр., из-за
неправильного отсчитывания десятых долей деления шкалы прибора.
При
использовании
СИ
на
практике
их
метрологические
характеристики должны быть известны. Основные параметры, такие как
предел измерения, параметры номинальной функций преобразования,
цена деления шкалы и т. п., указываются в технической документации на
измерительный прибор.
4.4. Заключение
Общим направлением совершенствования устройств является
повышение уровня автоматизации, снижение объемов работ по
эксплуатации, перевод объектов в режим периодического обслуживания
без постоянного присутствия технического персонала. Это вызывает
необходимость дальнейшего совершенствования измерений. Оно идет в
направлении разработки и внедрения автоматизированных измерительных комплексов, применения телеконтроля, телеизмерений, систем
технической диагностики состояния устройств, которые обеспечивают
сбор информации с контрольных точек оборудования, ее обработку с
помощью микроЭВМ и сравнение полученных значений с нормами,
заложенными в программу. Использование электроизмерительной техники
во
всех
областях
применения
электротехнических
устройств
железнодорожного транспорта повышает надежность их работы,
оперативность устранения отклонений от норм, безопасность движения
поездов.
50
ЛЕКЦИЯ 5. СИСТЕМЫ ТЕХНИЧЕСКОЙ ДИАГНОСТКИ И
МОНИТОРИНГА УСТРОЙСТВ ЖАТ
5.1. Системы технической диагностики
5.1.1. Общие положения
Техническая диагностика(ТД) - научно-техническая дисциплина,
изучающая и устанавливающая признаки дефектов технических объектов, а
также методы и средства обнаружения и поиска дефектов. Основной
предмет диагностики - организация эффективной проверки исправности,
работоспособности,
правильности
функционирования
технических
объектов. Организация процессов диагностирования технического состояния
элементов или блоков при их изготовлении и эксплуатации – одна из
важных мер обеспечения и поддержания надёжности технических объектов
[33].
Диагностирование осуществляется либо человеком непосредственно
(например, внешним осмотром, "на слух"), либо при помощи аппаратуры.
Электронная технология диагностики на базе протоколов измерения
технических параметров позволяет получить оценку состояния объекта и
определить виды неисправностей.
Объект и средства его диагностирования в совокупности образуют
систему диагностирования. Взаимодействуя между собой, объект и средства
реализуют некоторый алгоритм диагностирования. Результатом является
заключение о техническом состоянии объекта - технический диагноз,
например: "датчик исправен", "деталь неработоспособна", "в компьютере
отказал блок электропитания" [10, 11].
По взаимодействию объекта и средств диагноза между собой
различают тестовое и функциональное диагностирование. Системы
первого вида (см.рис.5.1) применяют при изготовлении объекта, во время
его ремонта и профилактики и при хранении, а также перед применением и
после него, когда необходимы проверка исправности объекта или его
работоспособности и поиск дефектов. В этом случае на объект
диагностирования
подаются
специально
организуемые
тестовые
воздействия. Системы второго вида применяют при использовании объекта
по
назначению,
когда
необходимы
проверка
правильности
функционирования и поиск дефектов, нарушающих последнее. При этом на
объект
поступают
только
предусмотренные
его
алгоритмом
функционирования (рабочие) воздействия.
Так, при тестовом диагнозе специальное воздействие (рис.5.1)
поступает от источника воздействия ИВ средств диагноза на объект
диагноза ОД. Ответная реакция через устройства связи УС принимается
датчиком Д. Блоком расшифровки результатов БРР сигнал сравнивается с
51
различными известными реакциями состояния ОД, заданными физической
или
ПУ
во Тес
з д то
ей в ы
ст е
ви
я
БУ
вх
ИВ
УС
в
От
ФМ
ОД
ет
Д
вых
БРР
Результат диагноза
Рис. 5.1.Функциональная схема тестового диагноза
математической моделью ФМ. Блок управления БУ связан с пультом
управления ПУ и осуществляет управление программой диагноза.
Функциональная диагностика, которая проводится только на
работающем объекте и, как правило, выполняется с точностью до
определения одного из двух его состояний: (исправен - неисправен,
работоспособен – неработоспособен, функционирует – неправильно
функционирует). Однако, в большинстве случаев такая оценка состояния
объектов не удовлетворяет их владельцев и тогда применяется
функциональная диагностика c использованием трехуровневой оценки
состояния (исправен – неисправен, но и работоспособен – не
работоспособен).
В том и в другом случае речь идет об общей функциональной
диагностики или общей оценки состояния объекта и диагностика
сводится к определению одного из вышеназванных состояний объекта с
помощью моделей переходов состояний. Главным недостатком общей
функциональной диагностики является то, что она не дает ответы на такие
важные для пользователя вопросы, как:
- Какие детали и узлы элемента объекта неисправны?
52
- Какие виды неисправностей имеют детали, узлы, элементы и
объекты в целом?
- Когда произойдет отказ детали, узла , элемента, объекта?
Ответить на первый вопрос можно в том случае, если воспользоваться
функциональной диагностикой с оценкой состояния объекта по
совокупности технических и технологических параметров его деталей,
узлов и элементов. В этом случае речь идет о параметрической
функциональной диагностики, и совершенно очевидно, что для такого
контроля необходим строго определенный набор диагностических
параметров, характеризующей состояния детали, узла, элемента и
объекта в целом, и, если речь идет о трехуровневом состоянии объекта,
нужно точное значение их допустимых, предельных и запредельных
значений. В этом случае диагностика сводится к измерению
диагностических параметров и сравнению их с
допустимыми,
предельными и запредельными значениями. При этом, совокупность
измеренных значений параметров представляет собой протокол состояния
объекта, а совокупность параметров, значения которые находятся вне
допуска, представляет собой протокол исключения параметров. Однако, и
в этом случае, после проведения параметрической функциональной
диагностики можно только констатировать то или иное состояние, и
невозможно указать виды неисправностей и когда произошел или
произойдет отказ детали, узла или полный отказ самого объекта. В
настоящее время функциональная диагностика в чистом виде, как
правило, не используется. Она, как минимум, дополняется функцией
прогнозирования значения наблюдаемых параметров по их тренду во
времени и функцией определения дат ближайшего ТО контролируемого
объекта.
Разработка и создание систем диагностирования включают: изучение
объекта, его возможных дефектов и их признаков; составление
математических моделей (формализованного описания) исправного
(работоспособного) объекта и того же объекта в неисправных состояниях;
построение алгоритмов диагностирования; отладку и опробование системы.
Математическая модель объекта диагностирования (детерминированная
или вероятностная) представляет собой описание объекта в исправном и в
неисправном его состояниях в виде формальных зависимостей между
возможными воздействиями на объект и его реакциями на эти воздействия.
Модели (даже исправных объектов) используемые при диагностировании,
могут отличаться от моделей, используемых при проектировании тех же
объектов. Например, для диагностирования технического состояния
шумящих объектов моделями могут служить кривые шума или вибрации
(при так называемых акустических методах диагностики), а в микроэлектронной технологии или в сварочном производстве - изображения
объектов в рентгеновских лучах (при неразрушающем контроле).
53
Алгоритм диагностирования предусматривает выполнение некоторой
условной
или
безусловной
последовательности
определённых
экспериментов с объектом. Эксперимент характеризуется тестовым или
рабочим
воздействием
и
составом
контролируемых
признаков,
определяющих реакцию объекта на воздействие. Различают алгоритмы
проверки и алгоритмы поиска. Алгоритмы проверки позволяют обнаружить
наличие
дефектов,
нарушающих
исправность
объекта,
его
работоспособность или правильность функционирования. По результатам
экспериментов, проведённых в соответствии с алгоритмом поиска, можно
указать, какой дефект или группа дефектов (из числа рассматриваемых)
имеются в объекте.
Средства диагностирования являются носителями
алгоритмов
диагностирования, хранят возможные реакции объекта на воздействия,
вырабатывают и подают на объект тестовые воздействия.
Мониторинг технического состояния - процесс дистанционного
контроля
(телеконтроля)
технического
состояния
объекта,
по
определенному алгоритму с накоплением информации и оценкой
полученной информации в течении времени с целью идентификации
текущего состояния объекта и обеспечения прогнозирования изменения его
состояния.
Администрирование системы технического диагностирования и
мониторинга - управление аппаратными и программными средствами
системы
с
целью
изменения
конфигурации,
поддержания
работоспособного состояния и правильности функционирования.
Прогнозирование
технического
состояния
определение
технического состояния объекта с заданной (расчетной) вероятностью на
предстоящий интервал времени.
5.1.2. Прогнозирование случайных процессов
Прогнозирование, в узком значении – специальное
научное
исследование конкретных перспектив развития какого либо явления.
Различают поисковое (генетическое, изыскательское, исследовательское)
и нормативное прогнозирование. Первое
имеет целью получить
предсказание состояния объекта исследования в будущем при
наблюдаемых тенденциях, если допустить, что последние не будут
изменены посредством решений (планов, проектов и т.п.). Нормативное
прогнозирование
предпологает
предсказание
путей
достижения
желательного состояния объекта на основе заранее заданных критериев,
целей, норм. Важную роль в прогнозировании играет обратная связь
между предсказанием и решением, интенсивность её неодинакова для
различных объектов исследования. Теоретически она нигде не равна
нулю: человек в отдалённой перспективе сможет изменять посредством
решений и действий всё более широкий круг объектов предсказания.
54
Прогнозирование случайных процессов (ПСП) - есть предсказание
значения случайного процесса (экстраполирование) в некоторый будущий
момент времени по наблюдённым значениям этого процесса в прошлом и
настоящем. Практически во всех представляющих интерес ситуациях
предсказываемое значение процесса X (t ) в момент t t1 не может быть
точно определено по имеющимся данным наблюдений и можно лишь
добиваться, чтобы случайная ошибка прогноза D X (t1) X1t1 {где
в среднем была бы по
X 1(t1) - предсказанное значение X (t1) }
возможности наименьшей. В теории ПСП оптимальным обычно считается
прогноз, для которого минимально математическое ожидание квадрата
ошибки D . Такой оптимальный прогноз совпадает с условным
математическим ожиданием случайной величины X (t1) при условии, что
наблюдаемые величины, по которым строится прогноз, принимают
фиксированные (известные из наблюдений) значения. Большое место в
теории ПСП занимает теория оптимального линейного ПСП, посвящённая
методам нахождения линейной функции от данных наблюдений такой, что
для неё средний квадрат её отклонения от X (t1) меньше, чем для всех
других линейных функций.
Общая теория оптимального линейного ПСП для случайных процессов
была разработана А. Н. Колмогоровым и Н. Винером. Большое развитие
получила также теория оптимального (и линейного, и общего нелинейного)
прогнозирования процессов, являющихся компонентами марковских
случайных процессов.
Большинство
методов
прогнозирования
длительной
работоспособности изделий электронной техники предполагают наличие
исходной информации о поведении большого числа образцов
рассматриваемых элементов на отрезке времени испытаний. Но для
многих приборов приходится иметь дело с малыми и предельно малыми
выборками.
Обработка результатов ведется с использованием математической
статистики [23], напр., интервальное оценивание, которое предполагает
наличие математического аппарата вычисления искомых оценок. Если
такой аппарат построить нельзя, то единственной возможностью
обоснованного проведения прогноза является экспертный подход. На
основании
опыта
эксплуатации
и
испытаний
можно
считать
установленным допустимость использования теории марковских и
полумарковских процессов, как процедуры прогнозирования. Тогда задача
прогноза сводится к выбору конкретного типа случайного процесса, в
пределах упомянутых классов, и определению параметров описания
избранного процесса.
55
5.1.3. Выбор прогнозирующих параметров
Оптимальное число контрольного параметра
- это когда
обеспечивается min цена отказа, т.е. за время эксплуатации объекта
достигается max среднее падение цены отказа
D(W jk )
1
n
max
1
(5.1)
y
Ty Pi (t ) Ei (W jk )dt
0
где W jk - j-й набор параметров; k – число параметров в объекте
диагностирования; T y – срок эксплуатации системы диагностирования;
Pi (t ) – вероятность отказа i-го элемента при отказе устройства;
Ei (W jk ) -
экономия от W jk при устранении i-й неисправности.
Предположим, что время безотказной работы любого из элементов
объекта диагноза подчинена экспоненциальному закону распределения и
Pi (t )
i t
(5.2)
n
j t
1
где Pi (t ) - вероятность безотказной работы i-ого элемента в момент
времени (0 t ) ; i - интенсивность отказов i-го элемента в момент
времени t , n - количество элементов.
То задача максимизации функционала D(Wjk ) эквивалентна его
минимизации
n
k
d W j Pi F Tb
1
i
(5.3)
где F Tbi - функция времени восстановления.
Таким образом, большему значению числа контролируемых
параметров должно соответствовать меньшее значение функционала
(5.3). Выбор требуемого количества контролируемых элементов
описывается в [11,33].
5.2. Задачи систем диагностирования устройств ЖАТ
К объектам диагностирования относят устройства: электрической
централизации (ЭЦ); диспетчерской централизации (ДЦ); путевой
автоблокировки (АБ), путевого оборудования автоматической локомотивной
сигнализации (АЛС, САУТ); сортировочных горок (ГАЦ, АРС); переездной
сигнализации, заграждения и управления шлагбаумами; контроля
56
технического состояния подвижного состава на ходу поезда; оповещения,
пожарно-охранной сигнализации, освещения, кондиционирования, отопления
технологических помещений.
Для диагностирования объектов ЖАТ применяют стационарные,
мобильные и переносные системы диагностирования.
Стационарные
системы диагностирования
разделяются
на
специализированные для диагностирования отдельных видов устройств ЖАТ
(рельсовых цепей, кабельных сетей, устройств электропитания и др.) и
универсальные для комплексного диагностирования систем ЖАТ. Они могут
быть распределенными, когда отдельные компоненты системы
диагностирования разнесены в пространства и связь между ними
осуществляется по каналам передачи данных (дистанционное
диагностирование) или локальными.
Мобильные системы диагностирования размещают на подвижном
составе (вагоне-лаборатории, дрезине и т.п.) или на автотранспорте и
применяют там, где по технологическим или экономическим условиям
нецелесообразно или невозможно применение стационарных систем.
Переносные диагностические комплексы реализуемые на базе
переносных ПК применяются для повышения эффективности поиска
неисправностей, проведения ремонтно-восстановительных работ.
Цели создания системы диагностирования и мониторинга устройств
ЖАТ включают:
− обеспечение
требуемого
уровня
технического
состояния
эксплуатируемых устройств при сокращении финансовых, материальных
трудозатрат на ТО и ремонт;
− повышение достоверности контроля информации, исключение
субъективности оценок и необходимости применения разнообразных
приборов и приспособлений;
− обеспечение перехода на качественно новые методы контроля и
управления системой технического обслуживания ЖАТ.
Система диагностирования и мониторинга устройств ЖАТ должна
обеспечить решение следующих основных задач:
− автоматизация контроля эксплуатации устройств ЖАТ, обеспечение
оперативного и управляющего персонала достоверной информацией для
выработки решений;
− локализация мест нарушения нормальной работы устройств ЖАТ и
определение неисправной аппаратуры, автоматическое оповещение
оперативного персонала о аварийных ситуациях;
− создание общесетевой системы мониторинга состояния и
функционирования устройств ЖАТ;
− формирование БД, алгоритмов их обработки, прогнозирование по
результатам обработки полученной информации тенденций и динамики
изменения параметров контроля для целей планирования процесса ТО и
57
ремонта устройств ЖАТ, выработки новых подходов к определению
технического состояния устройств ЖАТ;
− расширение
номенклатуры
контролируемых
и
измеряемых
параметров напольного оборудования ЖАТ,
− интеграция с действующими и создаваемыми информационными и
управляющими системами различных служб железнодорожного транспорта.
При создании системы диагностирования и мониторинга необходимо
обеспечить возможность совместного использования разработок различных
групп и фирм, для чего архитектура средств диагностирования должна
быть модульной, иметь стандартизованный выходной интерфейс и
интеграцию в ПО информационных систем верхнего уровня.
В перспективе система диагностирования и мониторинга должна
рассматриваться как подсистема АСУ и контроля объектов ЖАТ (при
встроенных средствах диагностирования), либо взаимодействовать с этими
системами (при внешних средствах диагностирования). При этом должно
предусматриваться использование общих точек съема информации и
реализация методов пассивного диагностирования (без воздействий на
объект контроля).
Разработку диагностического обеспечения вновь создаваемых систем и
средств ЖАТ целесообразно выполнять на этапе их проектирования с тем,
чтобы предусмотреть необходимый уровень контролепригодности.
Эффективность применения диагностирования и мониторинга СЖАТ в
большой степени определяется качеством нормативного обеспечения
процесса разработки, проектирования и эксплуатации средств и систем
диагностирования, выбором датчиков, средств передачи и интерфейсов.
Прогнозирование возможного изменения состояния контролируемых
устройств может быть обеспечено путем формирования БД
о
функционировании устройств ЖАТ, применением аналитических и
статистических методов обработки результатов диагностирования.
Построение распределенной системы диагностирования и мониторинга
должно основываться на следующих принципах:
− открытость (технология открытых систем);
− многоуровневость (строится по многоуровневому иерархическому
принципу на основе типовых технических решений);
− масштабируемость (возможность наращивания количества модулей и
функций);
− безопасность;
− инвариантность (независимость от внешних мешающих воздействий);
− независимость каналов передачи информации;
− внешнего дополнения (самодостаточность с точки зрения
выполняемых функций).
Система диагностирования должна обеспечивать:
− сбор, первичную обработку и передачу информации о процессах
58
на объектах контроля;
− автоматическую регистрацию событий изменения параметров или
состояния устройств ЖАТ;
− формирование БД, прогнозирование по результатам обработки
полученной информации тенденций и динамики изменения контролируемых
параметров;
− локализацию мест нарушения нормальной работы устройств ЖАТ и
определение неисправной аппаратуры;
− контроль работоспособности, автоматическое тестирование системы
и средств диагностирования,
автоматизированную
калибровку
измерительных подсистем;
− интеграцию с действующими и создаваемыми системами контроля и
управления, взаимодействие с базами данных АСУ-Ш.
Система мониторинга должна обеспечивать:
− отображение состояния устройств ЖАТ, сообщений о нарушениях
нормальной работы устройств ЖАТ, пути, электроснабжения с уровнями
детализации, контроль работы ДСП;
− регулируемую централизацию данных и регулируемый доступ к базам
данных для решения задач управления, планирования, сервисного и
фирменного обслуживания устройств ЖАТ;
− возможность удаленного доступа к распределенным компонентам
СЖАТ для целей мониторинга и администрирования, изменения алгоритма
диагностирования.
Система диагностирования имеет следующие режимы работы:
− режим обнаружения неисправных приборов, блоков и участков
электрических цепей при штатной проверке функционирования;
− режим комплексного или выборочного измерения параметров
устройств ЖАТ установленным требованиям;
− диалоговый режим (рекомендации по выполнению необходимых
управляющих воздействий на проверяемую систему, по проверке и
настройке соответствующих параметров).
5.3. Лаборатория автоматики, телемеханики и связи
Лаборатория АТ и С дороги (далее — дорожная лаборатория) является
структурным подразделением железной дороги, непосредственно
подчиняется начальнику службы СЦБ, а по вопросам связи находится в
оперативном подчинении начальника службы НИС.
Лаборатория АТ и С железной дороги осуществляет методическое
руководство технологическим процессом ремонта и проверки аппаратуры
на участках железных дорог.
Дорожная лаборатория осуществляет:
59
− периодический технический контроль за состоянием и содержанием
эксплуатируемых устройств АТ и С;
− анализ работы устройств ЖАТС и разработку мероприятий,
направленных на повышение надежности функционирования этих
устройств;
− расследование опасных, наиболее сложных отказов в работе
устройств;
− эксплуатационные испытания новой техники АТ и С, проводимые в
рамках НИОКР, внедрение и сопровождение задач в рамках развития
комплексных информационных технологий по хозяйству сигнализации и
связи;
− подготовку и проведение школ передового опыта, семинаров,
конкурсов и курсов повышения квалификации.
Для выполнения основных задач дорожной лаборатории необходимы:
− технологическое обеспечение процесса эксплуатации устройств
ЖАТС, в том числе внедрение типовых технологических процессов (ТП)
технического обслуживания (ТО) и ремонта устройств;
− разработка ТП ремонтных и пусконаладочных работ;
− методы измерений и испытаний, дополняющих и уточняющих
типовые методики;
− мероприятия, направленные на повышение безопасности движения
поездов, надежности эксплуатируемых устройств, дающих экономический
эффект;
− обобщение передового опыта применения и распространения
средств малой механизации, измерительного и испытательного
оборудования, имеющегося на сети дорог, методов ТО и разработка
рекомендаций по их внедрению;
− координация разработок и внедрений АСУ процессом эксплуатации
устройств, периодический контроль за работой устройств СЦБ, АЛС,
САУТ, поездной радиосвязи (ПРС), устройств контроля подвижного
состава на ходу поезда (ПОНАБ, ДИСК, КТСМ, УКСПС, КГН КГУ), а также
оценка работы РЦ при помощи вагона-лаборатории согласно
утвержденному графику;
− участие в технических ревизиях, проводимых по планам служб;
− проверка качества работы и соблюдения технологической
дисциплины в ремонтно-технологических участках (РТУ), дистанционных
мастерских, дорожных электротехнических мастерских;
− оказание технической помощи ШЧ в определении и устранении
сложных отказов устройств, проведении измерений и паспортизации
аппаратуры, ремонте отдельных видов аппаратуры, выполнении
пусконаладочных работ при вводе новой техники;
− метрологический контроль за состоянием и применением средств
измерений;
60
− проведение калибровки (поверки) средств измерений и аттестации
испытательного оборудования на предприятиях хозяйства и в вагонелаборатории;
− участие во внедрении современных методов и средств измерений
автоматизированного
контрольно-измерительного
оборудования,
измерительных систем, эталонов для калибровки (поверки) средств измерений;
− анализ и согласование технической документации на устройства,
поступающие на утверждение в службу;
− рассмотрение и обобщение по заданиям службы изобретений и
рационализаторских предложений и, при необходимости, проведение их
экспериментальной проверки;
− оказание помощи дистанциям во внедрении изобретений и
рационализаторских предложений;
− проведение исследовательской работы с целью определения
показателей и разработки мероприятий по повышению надежности
действующих и вновь разрабатываемых устройств;
− аттестация электромехаников РТУ, контрольно-ремонтных пунктов
(КРП АЛС) дистанций на право приемки аппаратуры СЦБ и АЛС;
− инструктаж и консультирование специалистов по техническому
содержанию и ремонту устройств ЖАТС.
В ведении дорожной лаборатории находятся специальные автомобили,
служебные
вагоны-лаборатории,
станочное
и
испытательное
оборудование и средства измерений. Функции главного метролога ХСС
возлагаются на заместителя начальника дорожной лаборатории.
5.4. Заключение
Вновь разрабатываемые процессорные устройства ЖАТ должны иметь
строенные средства самодиагностики и обеспечивать интеграцию в систему
диагностирования ЖАТ. В системе диагностирования и мониторинга должны
найти широкое применение не требующие периодического ТО датчики,
преобразователи, устройства бесконтактного съема информации.
Сопряжение с устройствами ЖАТ средств диагностирования
должно
осуществляться
через
устройства
сопряжения,
обеспечивающие требования безопасности. В разрабатываемых системах
диагностирования целесообразно предусмотреть возможность замены
блоков и модулей без выключения питания (режим горячей замены).
61
ЛЕКЦИЯ 6. ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИЧЕСКИЕ СИСТЕМЫ
6.1. Система автоматического считывания информации с
движущегося подвижного состава
6.1.1. Назначение и принцип действия системы
Система автоматического считывания информации с движущегося
подвижного состава используется в рамках информационно-управляющей
системы и предназначена для автоматической фиксации подвижного
состава (локомотивов, грузовых и пассажирских вагонов, вагоновмеханизмов) через заранее выбранные пункты считывания.
Автоматическая идентификация заменяет ручное и визуальное
натурное списывание подвижного состава. Система обеспечивает
качественное улучшение сведений о подвижных объектах в части
достоверности информации и оперативности ее доставки пользователям
на всех уровнях управления. Система функционирует в реальном
масштабе времени. Развертывание системы имеет целью организацию и
ведение достоверной оперативно контролируемой БД на уровне ИВЦ
железных дорог и отрасли в целом.
Для достижения поставленной цели весь подвижной состав
оборудуется кодовыми бортовыми датчиками (КБД), несущими
информацию о каждом подвижном объекте, а в выбранных точках
полигона сети устанавливаются пункты считывания, включающие в себя
напольные считывающие устройства (НСУ), которые автоматически
снимают информацию с укреплённых на подвижном составе кодовых
датчиков и передают ее к месту ведения БД .
На рис. 6.1 показана структура систем автоматического считывания
номеров вагонов, где: ЭП – электронная педаль; СУ – считывающее
устройство; СО – счётчик осей; СДС – схема дешифрации сигналов; Н –
накопитель; К – кодер; П – передатчик; ЛС – линия связи.
ВД
ЭП
СУ
СДС
СО
Н
К
П
ЛС
Рис. 6.1. Структура систем автоматического считывания номеров
62
Идея считывания заключается в следующем. На вагоне укрепляют
датчик ВД, несущий информацию о номере в закодированном виде. При
проходе поезда по контрольному участку эта информация считывается и
дешифрируется. Процесс считывания активизируется специальными
устройствами контроля приближения поезда, в качестве которых обычно
применяют короткие РЦ наложения (электронные педали) или
электромагнитные точечные датчики. В процессе считывания выполняется
счёт осей вагонов. Схемы счётчиков осей вагонов позволяют
устанавливать направления движения, определяют порядок обработки
считанных сигналов.
Технически и организационно проблема считывания номеров вагонов
достаточно сложна, поскольку: считывание необходимо проводить без
снижения скорости поезда, которая может достигать 150-160 км/ч;
содержание и качество считанной информации не должно зависеть от
направления движения поезда; требуется выявлять вагоны с
поврежденными или отсутствующими датчиками; датчики должны быть
простыми в настройке, легкосъемными, приемлемыми для любых типов
вагонов, долговечными, а также работать без источника питания;
достоверность считывания не должна ухудшаться при плохой видимости,
загрязнениях датчика, а также при изменениях климатических условий.
Сочетать оптимальное решение этих задач в одном устройстве
достаточно трудно. Известны системы считывания, основанные на
различных физических принципах взаимодействия датчиков и приемников
устройств считывания, среди которых можно выделить оптические,
акустические,
радиоактивные,
магнитные,
электромагнитные,
индуктивные, радиочастотные и телевизионные [18, 36].
В настоящее время оборудуется датчиками весь подвижной состав
сети железных дорог и пункты считывания, сопряженные каналами
передачи информации с центрами обработки данных. Система
идентификации предназначается для решения следующего набора
основных прикладных задач:
1. система полностью берет на себя функции контроля фактического
состава поездов, высвобождает контингент сотрудников на станциях,
занятых списыванием и контролем составов поездов;
2. создает
базу
реализации
безбумажных
информационных
технологий;
3. решает проблему отчетности информационных структур по
вагонным паркам, снимая имеющиеся противоречия и автоматизируя
взаиморасчеты за пользование вагонами между железнодорожными
администрациями государств СНГ и стран Балтии – участницами
Соглашения о совместном пользовании грузовыми вагонами;
63
4. обеспечивает информационный сервис в транзитных перевозках и в
обслуживании отправителей и получателей грузов во внутреннем и
межгосударственном сообщении железных дорог;
5. создаёт надёжную информационную базу для перехода к системе
ремонтов и технического содержания грузового вагонного парка по
нормативным фактически выполненного пробега;
6. обеспечивает достоверность и оперативность ведущихся АСУ
железнодорожного транспорта в составе комплекса «ДИСПАРК» моделей
дислокации подвижного состава на элементах сети железных дорог,
повышая за счёт этого реальную эффективность решаемых в составе АСУ
задач.
В настоящее время на отечественных железных дорогах наибольшее
распространение получили системы считывания номеров вагонов типа
«Пальма» и ЛОТОС.
В зависимости от решаемой технологической задачи пункт считывания
системы автоматической идентификации может располагаться в
следующих местах:
1. На входах станций между входным светофором и первой стрелкой.
2. На выходах станций между последней стрелкой и указателем
«Граница станции».
3. На контрольных пунктах локомотивных или вагонных депо.
Схема сбора и передачи информации для пункта считывания имеет
следующий вид. Информация с каждого пункта через низкотемпературный
модем передается на концентратор информации системы автоматической
идентификации, расположенный на станции (как правило, в Доме связи,
товарной конторе и т.п.). Концентратор информации формирует
стандартное сообщение и передает его по системе передачи данных
(СПД) пользователям.
Сервер станции обеспечивает накопление нормативной информации о
движении поездов, обработку считанной информации, протоколирование
выполненной станцией поездной работы с детализацией до времени
прибытия и отправления поезда и номера приёмоотправочного пути,
распределение и вывод соответствующей информации на АРМ
пользователей.
Система обеспечивает: считывание данных с КБД локомотива или
вагона и учёт числа осей единицы подвижного состава при любом
направлении движения; надёжное считывание данных при скорости
движения от 0 до 140 км/ч (допустимая вероятность возникновения одной
обнаруживаемой средствами системы ошибки не более 0,000001);
распознавание и локализацию сведений о тех подвижных единицах,
бортовой прибор на которых неисправен или отсутствует; работу в
диапазоне температур от +70 до –500С в любых климатических условиях;
невосприимчивость к загрязнения, пыли от тормозных колодок, льду,
64
снегу, туману, пару и дыму, воздействию посторонних электромагнитных
полей. Кодовый датчик работает без источника автономного
электроснабжения. Система не должна создавать никаких помех в
нормальной эксплутационной работе, экологических проблем пассажирам
и персоналу. Кодовые датчики системы адаптированы к условиям
выполнения пропарки и промывки цистерн, к методам оттаивания сыпучих
смерзаемых грузов.
6.1.2. Структура системы «Пальма»
Элементами системы являются КБД, стационарное напольное
устройство считывания закодированных в датчике сведений НСУ,
средства передачи считанных данных в центр обработки с
использованием вычислительной сети АСУ железнодорожного транспорта.
Сообщение о факте проследования подвижного состава через пункт
считывания содержит следующий перечень обязательных данных: код
пункта считывания, направление следования, время проследования,
идентификационные
данные
подвижных
единиц,
данные
о
проследовавших подвижных единицах, у которых КБД неисправен или
отсутствует.
Кодовый бортовой датчик КБД крепится на каждом подвижном средстве
и представляет собой пассивный элемент, включающий полосковую
антенну, модулятор волнового сопротивления и интегральную микросхему
функционального
преобразователя,
которая
содержит
идентификационный код подвижного объекта. При прохождении мимо
пункта считывания СВЧ–излучение от облучающей считывающей
аппаратуры поглощается КБД и отражается обратно в облучающую
считывающую аппаратуру в модулированном виде, где декодируются и
затем передается в систему передачи данных.
Датчик СВЧ сигналы не регулирует, а модулирует
отражаемые
сигналы, которые поступают от НСУ – стационарно устанавливаемого на
расстоянии в несколько метров от железнодорожного пути в точках
контроля движения поездов. Для выполнения своих функций КБД имеет
полосковую антенну, модулятор волнового сопротивления и интегральную
микросхему функционального преобразователя кода с постоянным
запоминающим устройством. НСУ передает в направлении КБД сигналы в
диапазоне сверхвысоких частот, КБД поглощает часть этих сигналов и
отражает поступающие СВЧ– облучения обратно в НСУ где отраженные
радиосигналы декодируются. Расшифрованная информация по каналам
передачи данных доставляется обрабатывающей ЭВМ.
НСУ излучает СВЧ-колебания лишь в периоды, когда РЦ БУ, к которой
“привязан” излучатель занята подвижным составом. При отсутствии
подвижного состава НСУ находится в дежурном состоянии. Память НСУ
имеет емкость на 512 КБД. После прохода поезда блок накопленной
65
информации по каналу связи передается в обрабатывающий компьютер
ИВЦ.
Программирование КБД на конкретную информацию можно выполнять
с помощью специальных устройств-программаторов. За срок эксплуатации
данные КБД можно изменить до 5 раз. Расчетный срок эксплуатации КБД
не менее 10 лет.
Запоминающее устройство КБД содержит 128 бит информации. Из них
26 бит используется для технологических целей (контроль ошибок,
расходование информационного кадра, определение формата данных
защита от несанкционированного дублирования датчиков), а 102 бита
образуют содержательную область памяти общего назначения.
Для датчиков КБД принята и должна строго соблюдаться следующая
схема использования информационных полей - единый для сети железных
дорог колеи 1520 мм идентификатор подвижной железнодорожной
единицы (вагон, секция локомотива, механизм или устройство
на
железнодорожном ходу), состоящий из 12 десятичных цифровых
разрядов, записанных в датчике двоичными тетрадами (48 бит: 8 битусловный режим обмена, 8 бит –код государства собственника, 32 бита –8
–значный номер подвижной железнодорожной единицы);
Идентификатор представляет собой пассивный режекторный фильтр,
выполненный
с
учетом
используемого
для
считывания
сверхвысокочастотного спектра в виде отрезка прямоугольного волновода,
одна сторона которого заканчивается короткозамкнутой стенкой, а другая
переходит в приемопередающую рупорную антенну. На широких стенках
волновода размещены настроенные на определенные частоты в
соответствии с номером подвижного объекта резонаторы. Во избежание
попадания внутрь идентификатора влаги и грязи, что может нарушить
настройку резонаторов и исключить нормальную работу системы,
открытый конец антенны закрыт радиопрозрачной крышкой.
Идентификатор
содержит
16
симметрично
расположенных
резонаторов, что позволяет координировать 8 десятичных знаков номера
любого подвижного объекта, и размещается между тележками подвижного
объекта на его продольной оси таким образом, чтобы раскрыв антенны
был направлен в сторону колеи.
Напольное считывающее устройство работает в сантиметровом
диапазоне радиоволн, причем излучаемая в открытое пространство
мощность сигнала опроса идентификаторов не превышает единиц
милливатта. Оно состоит из антенного блока, приемопередатчика,
радиоэлектронного блока, формирователя сообщения о прошедшем
поезде и блока питания.
66
6.2. Автоматизация сбора информации о перевозочном
процессе
Одной из подсистем автоматизации управления на ж.-д. транспорте
является система управления движением поездов [1]. Особенности
движения рельсового транспорта предопределяют три основные
составные части процесса движения: диспетчерское руководство
движением в целом на участке, разграничение попутных и встречных
поездов и ведение поезда (рис.6.2). Все три составляющих процесса
образуют взаимосвязанный комплекс, определяющий движение на участке
и поэтому подлежащий автоматизации.
Автоматизированное управление движением поездов предусматривает решение комплекса задач, определяющих продвижение поездов по
участку, таких, как анализ, контроль и корректировка заданий диспетчером
на основании моделирования различных вариантов режима пропуска
поездов с расчетом их показателей, автоматический выбор оптимального
порядка пропуска поездов по одному или нескольким критериям,
выполнение принятых решений по команде диспетчера, номерной учет
продвижения поездов, указание на табло их размещения на участке, сбор
информации об отклонениях в продвижении поездов, отказах технических
средств и составление оперативной отчетности.
Организация поездным диспетчером (ДНЦ) самого процесса
продвижения поездов по участку ведется при соблюдении требований
безопасности с применением технических средств автоматики
разграничения поездов на перегонах (АБ) и станциях (ЭЦ).
д ом
П3 по
ст
пое
з
Об
гон
Пропу
ск
ение
анич
Ст. Б
П1
ие
с
П2
П7
Ст. Д
Ведение
поезда
Разграничение
поезда
ще
н
ст. Д
р
Разг
ие с П4
Ст. А
Ск
ре
по
пуск
Про
.АиБ
3
3
сП
Скрещен
П4
р
Ск
е
ещ
е
ни
Диспетчерское руководство
движением (автодиспетчер)
Ст. В
П2
П3
П5
Разграничение поездов (Автоблокировка, АЛС)
67
Рис. 6.2.Основные задачи по управлению движения поездов
При АБ перегон делят на блок – участки, а на их границах
устанавливают проходные светофоры, показаниями которых управляют
сами движущиеся поезда с помощью аппаратуры размещенной в
релейных шкафах. С целью повышения пропускной способности на
перегонах, при безусловном выполнении безопасности движения поездов,
применяют различные системы АБ [17, 19, 36].
При
локомотивной
сигнализации
(АЛС),
применяемой
как
самостоятельное средство сигнализации, раздельными пунктами служат
границы между блок-участками, а движение осуществляется по сигналам
ЛС . При этом нормальное движение может происходить только при
действующих устройствах на локомотиве [13].
Что касается технической базы устройств автоматики, то она все время
совершенствуется, внедряются новые более прогрессивные технические
решения, повышающие надежность и дающие новые эксплуатационные
качества.
Для определения подвижного состава на участках пути каждый блокучасток оборудуется РЦ. На рис. 6.3 приведены схемы поясняющие
принцип действия двухзначной системы АБ [17, 19].
На границах смежных блок - участков, в створе с проходными свето
форами устанавливаются изолирующие стыки. На одном из концов блок участка 1БУ и 3БУ к рельсам подключаются источники питания ПБ1, ПБ3.
На противоположных концах блок - участков включаются путевые
приемники П1, П3 (реле) а рельсовые нити железнодорожного пути служат
проводниками сигнального тока.
3БУ
1БУ
R0
П3
п
к з
П3
-
м
светофор 3
R0
П1
п
ПБ3
к з
П1
м
ПБ1
светофор 1
Рис. 6.3 Схемы автоматического управления проходными светофорами
68
Если блок-участок 1БУ свободен от подвижной единицы, то ток от
путевой батареи ПБ1 через ограничивающий резистор Rо и рельсовые
нити будет протекать через обмотку путевого приемника П1. Реле
притянет свой якорь и фронтовым контактом создаст цепь для включения
лампы зеленого огня на светофоре 1 от источника питания с полюсами П
и М. Зеленый огонь светофора указывает, что ограждаемый им блокучасток свободен и рельсы не повреждены [19].
При вступлении поезда на блок-участок 3БУ, ограждаемый светофором
3, РЦ шунтируется его колесными парами, имеющими очень малое
сопротивление. Это приводит к значительному снижению напряжения на
путевом реле П3. Реле отпускает свой якорь и замыкает тыловой контакт.
На светофоре 3 к источнику питания подключается лампа красного огня.
Благодаря горению красного огня на светофоре 3 въезд второго поезда
на занятый блок-участок запрещается, пока он не освободится от
подвижной единицы. Как только блок-участок 3БУ освободится,
напряжение на путевом реле П3 увеличится до напряжения срабатывания
и его фронтовыми контактами на светофоре 3 включится лампа зеленого
огня. В этом и заключается
автоматический съем информации от
нахождении поезда на БУ, за счет чего обеспечивается управление
проходными светофорами.
6.3. Классификация систем управления поездной работой
Во многих случаях возникает необходимость сбора данных,
приведение их к удобному для дальнейшей обработки виду и передачи на
более высокий уровень. Такие задачи решаются и на ж.-д. транспорте
в
69
Рис. 6.4. Автоматизированное рабочее место поездного диспетчера
системах диспетчерского управления (ДЦ) и контроля (ДК) за движением
поездов (рис. 6.4). Централизация управления поездной работой в единых
дорожных
и региональных центрах (ЦУП) выполняется с помощью
интегрированных многоуровневых управляющих системах.
Автоматизации подлежит технология работы аппарата поездных
диспетчеров, а также технология работы ШЧ по контролю за состоянием
устройств, с возможностью передачи оперативной информации о
поездном положении и состоянии устройств работникам других служб.
Основным назначением ДЦ и ДК является своевременное обеспечение
диспетчерского аппарата ШЧ и отделения дороги полной и достоверной
информацией о показаниях сигналов, положении стрелок, маршрутов
приема и отправления поездов, состоянии устройств и действиях
эксплуатационного штата на станциях и перегонах с целью улучшения
диспетчерского руководства эксплуатационной и оперативной работой
[28,30].
Устройства ДК представляет поездному диспетчеру информацию о
установленном направлении движения (на однопутных перегонах
оборудованных АБ), занятость БУ, главных и приёмо-отправочных путей
на промежуточных станциях, а также повторяют показания входных и
70
выходных светофоров.
Кроме того, ДК предназначен для обеспечения
первичной информацией о поездном положении и состояниях устройств
других пользователей, посредством функционирования в ЛВС или СПД
[1,42].
На отечественных железных дорогах в 1936 начали применять ДЦ
временного кода. Затем была разработана частотная ДЦ. Дальнейшая
модернизация привела к созданию в 1967 г ДЦ системы «Нева» с
циклическим способом передачи сигналов. Она получила наибольшее
распространение на сети дорог страны [50,17]. В 1978 введена в
эксплуатацию система «Луч» с трехзначной относительной фазовой
манипуляцией. Сдвиг фазы в сторону опережения кодируется как сигнал
логического 0, а в сторону отставания – как логическая 1. В настоящее
время разрабатываются и широко внедряются микропроцессорные ДЦ. К
таким системам относятся ДЦ и ДК, разработчики которых приведены в
табл. 6.1. Функционально они отличаются незначительно, поэтому для
примера рассмотрим АПК-ДК (рис.6.5).
Таблица 6.1
Компьютерные системы диспетчерского управления и контроля
Название
Разработчик
ДЦ «Юг»
Северо-Кавказская
дорога
и
НТП
«Промавтоматика», прототип система «ДОН»
ДЦ Тракт
«Техтранс» г.Санкт-Петербург
Диалог-Ц
РГТУПС, Москва
ДЦ Сетунь
ВНИИСА
(использование
центрального
оборудования, линейные пункты существующих
систем Нева, Луч, ЧДЦ)
ДЦ-ПК,АПК-ДК
ПГУПС, Санкт-Петербург
АСДК -Сектор
ГТСС
Подсистема диспетчерского управления движением поездов входит в
состав АПК-ДК и предназначена для обеспечения диспетчерского
аппарата отделения достоверными данными о движении поездов на
основе информации, получаемой от устройств АПК-ДК, других
существующих систем ДК(ДЦ) и дорожной АСОУП.
Подсистема автоматически ведет исполненный и прогнозный график
движения по диспетчерским участкам, обеспечивает персонал справочной
и нормативной информацией по станциям и перегонам, а также ведет
обмен информацией с системой АСОУП.
Основа подсистемы - территориальная диспетчерская вычислительная
сеть, объединяющая в единую информационную структуру все звенья,
связанные с процессом управления движением поездов:
− станции, оборудованные станционной аппаратурой АПК-ДК;
− существующие центральные посты ДЦ;
71
− сетевые компьютеры на рабочих местах ДНЦ, ЭЧЦ, ШНД, ШД.
72
М
НСД
др. ДЦ
к ЛВС НСД
АСОУП
АРМ
М
АРМ
оператор
М
к ЛВС ШЧ
АРМ-УО
к АСШ
АРМ-ШЧД
М
М
М
М
Концентратор
М
СтА
стЮ
ст
АКСТ
переезд
стЮ
АКСТ
АКСТ
Рис. 6.5. Структура АПК-ДК
стЮ
ст
АКСТ
АКСТ
ДИСК
РЕЛЕЙНАЯ
ПУЛЬТ
ЭЦ
ПИК-10
АЛП
ЛП
М Физическая
линия
Концентратор
М
ПИК-120
Ю
ЦП
Ю
М
ПУЛЬТ
стЮ
ст
АКСТ
стЮ
АКСТ
М
СтВ
АКСТ
ЛП
АЛП
ЭЦ
стЮ
стЮ
ст
АКСТ
РЕЛЕЙНАЯ
ПИК-10
М
Аппаратура
уплотнения
Концентратор
М
ПИК-120
ДИСК
Ю
Аппаратура
уплотнения
Ю
73
Структура АПК-ДК трехуровневая. Первый уровень представляет собой
станционный аппаратно-программный комплекс (аппаратура контроля
сигнальной точки, аппаратура
контроля аналоговой информации).
Технологический комплекс контроля и диагностики состояния устройств
СЦБ в ШЧ включается во второй уровень системы. Технологический
комплекс диспетчерского управления движением поездов в ЦУП – 3-ий
уровень системы.
Структура технических средств обеспечивает работоспособность
системы в целом при возникновении сбоев, отказов в ее отдельных узлах
и устройствах. Имеется возможность приема и передачи информации по
стандартизированным СПД и работы в стандартных ЛВС (Novell NetWare,
Microsoft Networks, Banyan, QNX с различными протоколами - TCP/IP,
NetBEU, IPX/SPX и др.). Для работы АПК-ДК использованы многозадачные
операционные системы реального времени QNX, WINDOWS NT.
Системное ПО включает в себя:
− сетевую операционную систему WINDOWS NT 4.0 SERVER или
выше, интерфейс RS-485, RS-232;
− программное обеспечение системы управления базой данных,
поддерживающее SQL-запросы;
− сетевое
программное
обеспечение
поддерживающее
функционирование администратора сети WINDOWS NT 4.0 SERVER
RESOURS KIT или выше;
− сетевое
программное
обеспечение,
поддерживающее
функционирование TCP/IP;
− сетевое
программное
обеспечение
для
управления
маршрутизаторами.
Основными целями создания ДЦ и ДК является:
− автоматизация основных функций поездного диспетчера ДНЦ;
− получение своевременной, полной и достоверной информации об
устройствах ЖАТС за счет, непрерывного контроля за их техническим
состоянием с помощью сигналов ТС (информация о состоянии объектов
передается в устройства ДК с периодичностью 50 мс, время передачи
команд ТУ– не более 0,2 с; сигналов ТС – не более 1 с);
− повышение надежности работы устройств, за счет своевременного
выявления предотказных состояний и профилактики сбоев.
Источниками информации в этих системах [28,42,50] являются:
− приборы линейных пунктов, сигнальных точек и переездов участков
железных дорог;
− станционные устройства автоматики, позволяющие контролировать
поездную и технологическую ситуацию на станции (РЦ, сигналы, стрелки);
− аппаратура центрального поста ДК, ДЦ и ЭЦ станций;
− станционные приборы и устройства, позволяющие контролировать
технические и технологические нарушения в работе систем (повреждение
74
источников питания, перегорание предохранителей, нажатие аварийных
кнопок и т. д.);
− аппаратура контроля аналоговых сигналов (напр., ПИК-10);
− аппаратура ДИСК (ПОНАБ);
− приборы и устройства специальных систем крупных сортировочных
станций, обеспечивающих технологию сортировочной работы (АРС, ГАЦ и
пр.);
− аппаратура передачи данных (для приема информации с СПД);
− пожарно-охранная сигнализация;
− прочие устройства.
Съем информации с приборов и устройств предусматривает:
− непосредственное подключение входных цепей контроллеров с
использованием гальванических (опто- и релейных) развязок;
− использование релейных повторителей в необходимых случаях;
− использование бесконтактного способа подключения;
− подключение к пульту-табло, выносному табло и пультуманипулятору станций.
6.4 Программируемый индустриальный контроллер
Совокупность контроллеров создает распределенную систему сбора и
обработки информации. В распределенной системе сбор информации
выполняется контроллерами, рационально приближенными к объекту.
Программируемые индустриальные контроллеры ПИК-120M или ПИК-10
используется в системе АПК-ДК.
6.4.1 Прибор ПИК-120М
Прибор ПИК-120М предназначен:
− для преобразования в стандартный цифровой вид постоянного или
переменного напряжения, поступающего на цифровые входы. Присутствие
напряжения на конкретном входе
преобразуется
в
логическую
единицу, отсутствие - в логический ноль в соответствующем бите байта;
− для передачи полученного в результате преобразования массива
данных на внешний хост-процессор по его запросу;
− для формирования сигнала включения внешнего модема
радиоканала или других средств связи.
Система АПК ДК работает с дискретными сигналами, снимаемыми с
пульта управления, и аналоговыми сигналами, снимаемыми с путевых
реле. По этой причине шкафы с контроллерами, реализующие сбор
дискретной информации, целесообразно разместить в помещении, где
расположен пульт ДСП.
75
преобразова
тель
Резистор
ы
Оптронный
преобразова
тель
Стабилизатор +5 В
напряжения
Микроконтроллер
Цифровые
Связь с
входы
1…….120 концентратором
На рис 6.6 изображена функциональная схема прибора ПИК-120М. В
состав прибора ПИК -120М входят: плата микроконтроллера; корпус с
одним разъёмом СН2-10ШБ и пятью блочными разъёмами РП14/30.
Преобразователь
уровня
Рис. 6.6. Функциональная схема прибора ПИК-120М.
На сто двадцать цифровых дифференциальных входов оптронного
преобразователя могут поступать постоянные напряжения в диапазоне 36В ÷+36В или переменные напряжения амплитудой 36В и частотой 50Гц.
Эти напряжения через ограничительные резисторы прикладываются к
оппозитно включённым светодиодам входных оптронов.
Эмиттерные выводы фототранзисторов оптронов каждой группы через
последовательно соединённые с ними диоды также объединены в одну
цепь.
Далее, цепи поступают на выходы порта микроконтроллера.
Устанавливая высокий уровень напряжения на каком-либо проводе, можно
блокировать выходы соответствующей группы оптронов.
Коллекторы фототранзисторов одноимённых групп оптронов нагружены
на общий резистор, образуя схему "ИЛИ" (в каждой из восьми сборок по 15
коллекторов). Для фототранзисторов первых оптронов в группах это цепь
"OUT1", для вторых "OUT2",..., для восьмых "OUT8". Эти цепи
"OUT1"..."OUT8" соединены с восемью входами преобразователя уровня,
формирующего на своих выходах напряжения с уровнями ТТЛ. Если на
каком-либо цифровом входе активной группы оптронов есть напряжение,
то на соответствующем выходе преобразователя присутствует низкий
уровень напряжение. В противном случае на выходе формируется
постоянное напряжение +5В.
В каждый момент времени активной может быть только одна группа
оптронов. На выходе преобразователя формируются напряжения,
соответствующие этой группе оптронов, и подаются на восемь входов
76
порта микроконтроллера для дальнейшего преобразования этого ряда
сигналов в один байт.
Независимо от посылок ХОСТ-процессора прибор ПИК-120М
непрерывно ведёт обработку сигналов, поступающих на цифровые входы.
Электропитание микроконтроллера и других активных и пассивных
компонентов ПИК-120М осуществляется от стабилизатора напряжения
+5В. На вход стабилизатора подаётся нестабильное напряжения +10В от
внешнего выпрямителя. Связь микроконтроллера с управляющим ХОСТпроцессором осуществляется по двум последовательным линиям типа
"токовая петля". Выходы микроконтроллера и линия связи соединены
через развязывающие оптронные преобразователи.
Одновременно к линии связи может быть подключено 16 приборов
ПИК-120М. Для исключения воздействия наводок, все светодиоды
оптронов зашунтированы резисторами сопротивлением 10 кОм.
6.4.2 Аппаратура съема аналоговой информации (ПИК-10)
Прибор ПИК-10 имеет 10 аналого-цифровых входов, и предназначен:
− для
измерения
средних
значений
напряжений
сигналов
переменного тока;
− для измерения сопротивления изоляции электрических цепей
(кабель, монтаж и т.д.) контрольных объектов;
− для преобразования в стандартный цифровой вид сигналов
переменного и постоянного тока, поступающих на цифровые входы;
− для передачи измеренных значений напряжений и сопротивления
изоляции в виде последовательного цифрового кода в концентратор по
его запросу;
− для передачи, полученного в результате преобразования, состояния
дискретных датчиков в концентратор по его запросу.
В состав прибора ПИК-10 входят: плата микроконтроллера, плата
источника питания и реле, корпус и колодка для установки на релейный
статив.
Принцип работы ПИК-10 заключается в следующем. К десяти
аналоговым дифференциальным входам релейного коммутатора могут
прикладываться переменные напряжения амплитудой 0 В U 50 В и
частотой 25 Гц, 50 Гц или 75 Гц. Эти напряжения подаются через контакты
релейного коммутатора. Для каждого канала свое реле. Нормальное
состояние контактов всех реле – разомкнутое. Реле начинают включаться
последовательно командам микроконтроллера только после того, как на
микроконтроллер от концентратора поступило проведение измерений
напряжения и сопротивления изоляции. На выход релейного коммутатора
подается напряжение через контакты одного из десяти реле, которое
включено в данный момент. Во включенном режиме может находиться
только одно реле. С выхода релейного коммутатора напряжение
77
поступает на дифференциальный вход аналогового преобразователя.
Таким
образом,
к
дифференциальному
входу
аналогового
преобразователя последовательно прикладывается напряжение каждого
аналогового канала для преобразования в восьмибитный код.
Для измерения сопротивления изоляции используется входящий в
состав ПИК-10 источник напряжения, создающий токи утечки в
измеряемой цепи, цепи аналого-цифрового преобразователя и
коммутатора. Способ измерения сопротивления изоляции основан на
измерениях токов утечки, протекающих между защитным заземлением
релейного статива и одной из внешних аналоговых цепей, которой в
данный момент релейный коммутатор подключен к ПИК-10. Измеренные
токи утечки подаются на АЦП микроконтроллера и преобразуются в
цифровой код.
Кроме этого, ПИК-10 может быть использован для контроля десяти
дискретных
датчиков.
В
этом
датчике
десять
цифровых
дифференциальных
входов
оптронного
преобразователя
могут
подаваться сигналы переменного и постоянного тока амплитудой от 12 до
36 В и частотой (502)Гц. Эти напряжения через ограничители
прикладываются ко входам оптронов. С выходов оптронов сигналы
поступают
на
входы
микроконтроллера,
который
производит
окончательное преобразование десяти сигналов.
Связь ПИК-10 с концентратором осуществляются по инициативе
концентратора по последовательным портам передачи типа «токовая
петля» или RS-485. Выходы микроконтроллера ПИК-10 и канал
гальванических элементов. Максимальная скорость передачи информации
9600 бод.
6.5. Мобильный измерительный комплекс автоматики и
радиосвязи
6.5.1. Назначение и устройство измерительного комплекса вагон–
лаборатории
В данном конспекте для примера рассмотрен мобильный
измерительный комплекс автоматики и радиосвязи (МИКАР). Он
предназначен для измерения и контроля параметров устройств АЛСН, РЦ,
САУТ, ПОНАБ (ДИСК), ПРС и оценки их технического состояния из вагоналаборатории на ходу поезда.
МИКАР включает также одну или несколько ПЭВМ и диспетчеркоммутатор связи, через который системы МИКАР подключаются к этим
ПЭВМ. Он может быть сконфигурирован и использован в различных
вариантах. Варианты использования МИКАР определяются порядком
организации испытательных поездок вагона-лаборатории и рабочих мест
пользователей основных систем.
78
Диспетчер-коммутатор связи систем с ПЭВМ – модуль, конструктивно
размещенный в блоке измерения координат пути. Взаимосвязь блоков
каждой из систем со своими внешними датчиками и взаимосвязь блоков
между собой и с ПЭВМ осуществляется кабельными линиями связи с
применением разъемов.
Внутрисалонное оборудование МИКАР (рис.6.7) состоит из блоков
(АЛСН; САУТ; СКАП-М; блок координат пути и диспетчера коммутатора
(БКП-ДК); блок питания, ПЭВМ, кабельного блока ввода-вывода, вводной
антенной коробки (антенно-согласующего устройства), измерительного
приемника радиосвязи, технологической радиостанции [29, 31].
Рис. 6.7. Внутрисалонное оборудование МИКАР
На структурной схеме системы измерения параметров АЛСН
схематично изображены внутрисалонное и внесалонное оборудование
системы (рис. 6.8).
Вневагонное оборудование МИКАР состоит из датчика оборотов
колеса; индукторов и датчиков для регистрации изолирующих стыков и
сигналов тональных РЦ (ИИ1, ИИ2); измерительных антенн САУТ;
имитаторов греющихся букс; имитаторов греющихся подступичных
областей; датчиков температуры кузова вагона; измерительных катушек и
антенны АЛСН к РАДИО.
Система измерения АЛСН предназначена для применения в
технологическом и метрологическом процессе обслуживания напольных
устройств АЛСН и РЦ путем измерения и оценки эксплуатационных
параметров этих устройств из вагона-лаборатории.
79
80
ИИ1
ИИ2
ДИ1
ДИ2
Кузов вагона
Каб. ввод
ДО
Тележка
Салон вагона
АЛСН
Рис. 6.8. Структурная схема системы измерения параметров АЛСН
Тележка
Электропитание
БКП - ДК
АЛСН
БП
МИКАР
ИК2
АА
ИК1
Система измерения АЛСН обеспечивает:
- измерение амплитудных и временных параметров сигналов АЛСН;
Основа подсистемы - территориальная диспетчерская вычислительная
сеть, объединяющая в единую информационную структуру все звенья,
связанные с процессом управления движением поездов:
- станции, оборудованные станционной аппаратурой АПК-ДК;
- существующие центральные посты ДЦ;
- сетевые компьютеры на рабочих местах ДНЦ, ЭЧЦ, ДНЦО, ДНЦС,
ШНД, ШД.
- обеспечение
возможности
долговременного
хранения
измерительной информации;
- обеспечение возможности сравнения результатов последних
измерений с результатами измерений, полученными во время
предыдущих поездок вагона-лаборатории;
Система измерения АЛСН содержит:
− датчик сигналов АЛСН РЦ - навесные измерительные катушки
АЛСН, устанавливаемые на типовые локомотивные на время проведения
измерений (ИК1, ИК2);
− выносная антенна АЛСН, устанавливаемая на переднюю автосцепку
локомотива на время проведения измерений (АА);
− измерительный приемник сигналов АЛС, выполненный отдельным
блоком в конструктиве МИКАР;
− блок координат пути, в котором размещены модули для измерения
координат пути (ДО - датчик оборотов колеса);
− регистрации изолирующих стыков и контроля тональных РЦ (ДИ1,
ДИ2);
− диспетчер-коммутатор связи с ПЭВМ;
− ПЭВМ типа IBM PC;
− датчиков температуры рельса (ДТР);
− датчиков углов крена и тангажа;
− датчика пройденного пути вагона (ДПП);
− датчика географических координат с точностью определения
местоположения.
Контролируемые параметры, непосредственно измеряемые в процессе
поездки:
− ширина рельсовой колеи;
− осадки каждой рельсовой нити;
− взаимное положение рельсовых нитей по высоте;
− стрелы изгиба в плане перекосы пути на базе тележки;
− перекосы пути на базе кузова;
− уклон продольного профиля оси пути;
− кривизна пути в плане;
− горизонтальные и вертикальные ускорения кузова;
− скорость движения;
81
− величина стыковых зазоров;
− температура рельсов;
− боковой износ рельсов;
− наличия неровностей на поверхности катания рельсов.
Параметры, вычисляемые после поездки:
− отметки продольного профиля пути;
− неровности продольного профиля пути;
− горизонтальные неровности в прямых участках;
− параметры устройства кривых участков;
− и др. характеристики.
6.5.2. Протоколы обмена данных с ПЭВМ
Управление блоком АЛСН и передача информации из блока АЛСН в
компьютер производится через диспетчер-коммутатор блока координат
пути БКП-ДК посредством протоколов обмена. При этом из компьютера в
БКП-ДК для блока АЛСН передается протокол запроса, а из блока АЛСН
через БКП-ДК в компьютер передается протокол ответа. Форматы
протокола запроса из компьютера в БКП-ДК для блока АЛСН (рис. 6.9)
состоит из трех байтов:
- 1-й байт содержит число 2 - это номер системы измерения АЛСН в
МИКАР. Этот байт предназначен для диспетчера-коммутатора БКП-ДК и
необходим ему для последующей передачи протокола запроса в систему
измерения АЛСН (блок АЛСН);
- 2-й байт содержит число 2 - это номер системы измерения АЛСН в
МИКАР. Этот байт предназначен непосредственно блоку АЛСН;
- 3-й байт содержит информацию для управления блоком АЛСН.
Значения битов этого байта представлены на рис.6.9.
Номер бита 7
6
5
4
3
2
1
0
"00"
"01"
"10"
"11"
Частота
"00" - 25 Гц
"01" - 50 Гц
"10" - 75 Гц
Тип дптчика
- измерительные катушки
- антенна
- калибровочные катушки
- датчик манжетного типа
Направление движения
"0" - котловое
"1" - не котловое
Резерв
Рис.6.9. Форматы протокола запроса из компьютера в БКП-ДК для блока
АЛСН
Протоколы запроса из компьютера в блок АЛСН поступают циклически.
Время между смежными протоколами запроса может изменяться в
82
пределах от 0,3 до 1,5 секунд. На каждый такой протокол запроса блок
АЛСН немедленно отвечает протоколом ответа либо первого, либо
второго формата. Длительность передачи протокола ответа второго
формата не превышает 0,7 секунды.
6.5.3. Принцип действия и состав комплекса вагона-лаборатории
Принцип действия комплекса вагона-лаборатории (КВЛ) основан на
сборе по заданной программе информации с датчиков, приведение ее с
помощью согласующих устройств к единому формату и выдача на ПЭВМ
«Параметры» для дальнейшей обработки с помощью программных
средств. Взаимодействие всех систем через информационную магистраль
обеспечивает ПЭВМ «Параметры», которая производит вычисления в
реальном времени «миллиметровых» параметров колеи, запоминание
этих параметров на сменном магнитном носителе, регистрацию ее на
принтере и, одновременно, передачу этих параметров в ЭВМ «Оценка и
анализ» для последующей бальной оценки состояния ж.-д. пути.
Функционально в состав КВК входят три подсистемы, связанные между
собой через локальную сеть: подсистема измерений; подсистема оценки;
подсистема графики и печати.
В состав подсистемы измерений входит ПЭВМ «Параметры» с датчики
и согласующие устройства:
− интерфейсная плата связи с 6-ю датчиками букса- кузов (СУБК). В
состав платы интерфейса СУБК входит однокристальная микро ЭВМ,
предназначенная для управления процессом измерений и предобработки
их результатов, а также восьми входовая аналоговая часть, работающая
и на фазовом принципе. Первые шесть из этих входов используются для
работы с 6-ю датчиками БК, две оставшиеся - для подключения датчиков
измерения коротких неровностей. СУБК генерирует прерывание в ПЭВМ
«Параметры» каждые 4,1 мс;
− интерфейсная плата связи с датчиком пути выполнена на основе
платы специализированного вычислителя типа «Торнадо», снабженного
платой преобразователя уровня. Плата преобразователя уровня
принимает импульсы амплитудой 12В от датчика пройденного пути
500имп/об.
− интерфейсная плата связи с системой оптических датчиков. Обмен
между платой и самой системой, осуществляется по 16 разрядной одно
направленной шине данных, с использованием 9 разрядной шины адреса,
сигнала готовности и строба. Сигнал готовности СОД генерирует в ПЭВМ
«Параметры» прерывания. Кроме обмена информацией с СОД
интрейфейсная плата обеспечивает ввод информации от кнопочных
пультов и системы привязки к местности;
83
− интерфейсная плата связи с инерциальной системой. Обмен между
платой и инерциальной системой осуществляется в последовательном
коде.
Подсистема измерений осуществляет:
− опрос всех измерительных датчиков;
− отбраковку и фильтрацию недостоверных измерений;
− вычисление на основе первичной датчиковой информации
физических параметров рельсовой колеи;
− передачу параметров, а также всех значений датчиков через
локальную сеть в подсистему оценки и подсистему графики и печати.
Передача информации в оценочную и графическую подсистему
осуществляется через каждые 0,2 метра пройденного пути. Для
предотвращения
“зависания”
любой
из
3-х ПЭВМ
применен
“датаграммный” способ передачи информации без квитирования.
Подсистема измерений
запоминает всю собранную датчиковую
информацию в виде дискового файла. Кроме датчиковой информации, в
этом
файле
запоминают
все
параметры
датчиков
(весовые
коэффициенты, смещения и т.д.). Наличие файлов дает возможность на
стоянке воспроизвести поездку с любого выбранного места с целью
детальной оценки.
В состав подсистемы оценки входит ПЭВМ
“Оценка и анализ”
(измерительная ПЭВМ индустриального исполнения класса с жестким
диском 4,3Мб, ОЗУ 32 Мб и 14-ти дюймового монитора), принтер для
печати результатов оценки состояния ж.-д. полотна.
Подсистема «оценки» по мере получения по сети информации от
подсистемы «измерений» производит оценку параметров рельсов колеи в
соответствии с руководящими документами МПС. В случае обнаружения
дефектов пути с бальностью хуже 3-й степени подсистема «оценки» через
локальную сеть посылает в адрес подсистемы «графики и печати»
соответствующую информацию.
Подсистема «графики и печати» предназначена для наблюдения за
графическими представлениями измерений параметров и датчиков в
“развертке” по пути. Подсистема отображает как “параметрическую”, так и
датчиковую
информацию
в
любом
наборе,
определяемом
конфигурационными файлами. Подсистема обеспечивает печать на
принтере номер путевой ленты или участков. Она способна запоминать
данные для печати
и выдавать их на принтер после временных
перерывов в печати.
В состав системы оптических датчиков (СОД) входят:
− датчики измерения ширины колеи (ДШК) предназначены для
измерения горизонтального расстояния от головки рельса до датчика;
84
− датчики измерения стрел изгиба (ДРК) предназначены для
измерения вертикального и горизонтального расстояний от головки рельса
до датчика;
− датчики измерения стыковых зазоров (ДСЗ) измеряют величину
зазоров рельсовых стыков с учетом температуры рельсов;
− датчики измерения износа рельсов (ДИР) определяют степень
износа рельса на высоте 13 мм от поверхности катания рельса;
− кросс-соединительные устройства (КСУ);
− пульт управления системой оптических датчиков (ПУ СОД).
Принцип действия оптических датчиков основан на бесконтактном
способе измерения расстояний в оптическом диапазоне волн. Исходя из
требования работы как в светлое как и в темное время суток, принята
активная схема построения датчиков. Принцип работы датчика
заключается в передаче энергии в направлении объекта, размеры до
которого необходимо измерить, и в приеме отраженного от него
излучения.
В
качестве
источника
излучения
используется
полупроводниковый инфракрасный лазер с длиной волны излучения 810
мкм.
Оптическая система осветителя формирует на поверхности рельса
пятно диаметром от 2 до 6 мм, для датчиков РК. И поперечную полосу для
датчиков ШК. Отраженный сигнал попадает в фотоприемник, где
преобразуется в величину, пропорциональную измеряемому расстоянию.
Геометрические характеристики рельсовой колеи определяются за счет
использования либо координатного приемника (ДШК), либо сканирующей
системы (ДРК). При использовании координатного приемника каждой
чувствительной площадке последнего соответствует определенная точка
исследуемого пространства. В сканирующей системе каждой точке
исследуемого пространства соответствует определенное угловое
положение сканирующего луча.
Величина стыкового зазора определяется посредством оптических
датчиков измерения стыковых зазоров. Для этого производят измерение
времени прохождения вагонам рельсовых стыков (частота импульсов
заполнения 1 МГц). В целях исключения влияния скорости движения
вагона, ДСЗ выполнен двухканальным с калиброванным базовым
расстоянием между каналами.
При прохождении первого луча на началом стыкового зазора
включается счетчики импульсов заполнения обоих каналов. Первый отсчет
фиксируется при прохождении 1-м лучом конца стыкового зазора (n
импульсов), второй отсчет фиксируется при прохождении 2-м лучом
начала стыкового зазора (N импульсов).
Величина стыкового зазора определяется из отношения:
85
X
nB
,
N
(6.1)
где X – величина стыкового зазора; N – число импульсов калиброванного
базового расстояния; n – число импульсов стыкового зазора; B –
величина базового расстояния.
6.6. Заключение
В данной лекции были рассмотрены виды технологических систем ж.-д.
транспорта, используемые для информационного обеспечения процесса
управления перевозками и диагностическая система с помощью вагонлаборатории. Более подробно с этими системами можно ознакомится в
[18, 36, 51]. Структурные схемы и алгоритм функционирования систем
АЛС, контроля состояния подвижного состава на ходу поезда приведены в
лекциях 8÷10. В этих системах используются датчики, рассмотренные в
лекции 7. С системами маршрутизации сортировочных отцепов на
сортировочных горках и устройствами телеконтроля состояния
аппаратуры ЖАТ можно ознакомится самостоятельно в [7, 11, 36].
ЛЕКЦИЯ 7. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ ПАРАМЕТРЫ
ТОЧЕЧНЫХ ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ
Надежная работа СЖАТ, имеющих в своем составе датчики для счета
осей (ДСО), во многом зависит от достоверности первичной информации,
поступающей от них. Например, ошибки в счете осей подвижного состава
приводят к нарушению контроля теплового состояния букс в эксплуатируемых сейчас системах ДИСК-Б, ПОНАБ и КТСМ. В настоящее
время имеются различные схемные и конструктивные решения ДСО,
отличающиеся по используемым видам систем и методам обработки
первичной информации. В дальнейшем познакомимся с некоторыми
видами ДСО [2, 8, 15, 20].
7.1. Магнитный точечный датчик прохода колес
В датчиках магнитного типа, информационный сигнал формируется на
основе эффекта электромагнитной индукции. Сигнал движения оси
(биполярный импульс напряжения) возникает при перемещении гребня
колеса над датчиком. Импульс достаточно просто обрабатывается
электронными устройствами системы (например, пороговыми) и
отождествляется с проходом оси над датчиком. Амплитуда импульса
падает с уменьшением скорости состава, и при остановках колеса над датчиком напряжение практически отсутствует, поэтому рассматриваемый,
86
датчик имеет информационное ограничение по скоростному диапазону
[20].
Датчик прохода колес типа ПБМ-56, используемый в устройствах
обнаружения перегретых букс и на сортировочных горках. Принцип
действия датчика основан на наведении в катушке ЭДС индукции за счет
изменения
величины
магнитного потока
при
проходе
гребня колеса 4
(рис.7.1)
в
воздушном зазоре.
Датчик состоит
из кронштейна 1,
катушки
2,
постоянного
магнита 3, скобы
6
и
соединительного
кабеля
8.
С
помощью
кронштейна,
скобы и гайки 7
датчик крепится
к подошве рельса
5. Постоянный
магнит установлен
на кронштейне
таким
образом,
что его поток
замкнут
через
кронштейн,
рельс
и
воздушный
зазор между головкой рельса и одним из полюсов магнита.
Рис. 7.1. Датчик прохода колес ПБМ-56
Относительно простая конструкция датчика (магнит и обмотка)
обусловливает его невысокую стоимость. К недостаткам датчиков магнитного типа можно отнести большие размеры, большое содержание
меди и наличие сильного магнита. Это провоцирует вандализм и, в конечном счете, увеличивает затраты на обслуживание.
87
В момент приближения гребня колеса к зоне действия датчика
магнитный поток в цепи увеличивается и достигает своего максимального
значения, когда колесная пара находится над датчиком. При этом в
катушке индуктивности наводится колоколообразный импульс напряжения.
Когда гребень колеса удаляется из зоны действия датчика, магнитный
поток в цепи уменьшается и датчик вырабатывает импульс напряжения
обратной полярности. Амплитуда и длительность выходных сигналов датчика определяются скоростью изменения магнитного потока, т. е.
скоростью движения поезда. Нижний предел скорости движения поезда,
при котором сигналы с датчика превышают уровень наводок составляет 5
км/ч.
В магнитоиндукционном точечном путевом датчике используется
генераторный первичный преобразователь, основанный на принципе
электромагнитной индукции, закон которой выражается формулой
е w
dФ
,
dt
(7.1)
где е – индуктируемая в катушке электродвижущая сила (ЭДС); w –
число витков в катушке; Ф – магнитный поток пронизывающий витки
катушки.
7.2. Вибродатчики, используемые в подсистеме ДИСК-К
Вибродатчик
является
виброизмерительным
пpеобpазователем
инерционного действия с пьезоэлектрическим чувствительным элементом,
работающим в режиме акселерометра. Амплитуда электрического сигнала
на выходе акселерометра прямо пропорциональна амплитуде ускорения
рельса, к которому крепится вибродатчик [52] .
Вибpодатчик состоит из двух основных частей: державки и
акселеpометpа с соединительным радиочастотным коаксиальным
кабелем. Принцип действия акселеpометpа основан на использовании
прямого пьезоэффекта, то есть свойства пьезокерамики генерировать
электрический заряд под действием приложенной к пьезоэлементам
механической силы.
При установке вибpодатчика на подошву рельса корпус акселеpометpа
будет воспринимать вибрацию рельса. Если, например, корпус будет
перемещаться вверх, то, вследствие стремления инерционного груза
сохранить состояние покоя, пьезоэлементы под действием силы F = ma
(где m - масса инерционного груза; a - ускорение рельса) будут сжиматься.
Возникающий при этом на электродах пьезоэлементов электрический
заряд Q пропорционален амплитуде ускорения. Напряжение U на входе
виброизмерительного
усилителя прямо пропорционально заряду Q и
обратно пропорционально электрической емкости С,
равной сумме
88
емкостей акселерометpа с выводным кабелем Са, внешнего
соединительного кабеля Ск и входной цепи согласующего усилителя Су
U
dma
Q
Ca C k C y
С
,
(7.2)
d - пьезомодуль керамики ЦТС-19.
где
Коэффициент преобразования акселерометpа по напряжению равен
К
U n мВ
,
g
an
,
(7.3)
где U n и a n - соответственно пиковые значения напряжения на выходе
акселерометpа и ускорения (в единицах g - ускорение свободного падения,
g = 9.8 м/с2), вызвавшего появление сигнала напряжением Uп.
Таким образом, напряжение сигнала на выходе акселеpометpа будет:
U n ku an , мВ
,
(7.4)
Так как акселеpометp соединяется с виброизмерительным усилителем,
имеющим входную емкость Су, дополнительным коаксиальным кабелем с
погонной емкостью Ск, то коэффициент преобразования акселеpометpа,
приведенный ко входу ВИУ, можно определить по формуле:
Ca
K u' K u
, мВ ,
(7.5)
g
C a C k Lk C y
где Ca - собственная емкость акселерометра с инвентарным
соединительным
кабелем (с которым производилась его калибровка),
пФ;
Cк
- погонная емкость дополнительного кабеля, пФ/м;
Cу
- емкость
входной цепи усилителя (масштабного конденсатора, шунтирующего вход
согласующего усилителя), пФ.
Из приведенных формул видно, что для обеспечения высокой
чувствительности виброизмерительного тракта необходимо стремиться к
уменьшению длины соединительных кабелей и емкости масштабного
конденсатора.
Виброизмерительный усилитель предназначен для масштабного
усиления
сигналов
вибродатчиков
(пьезоакселерометров),
пропорциональных ускорениям рельсов, двухкратного интегрирования
этих
сигналов
для
получения
вспомогательного
сигнала,
89
пропорционального виброперемещениям рельсов, и формирования
выходного диагностического сигнала по максимальному значению
(модулю) виброускорений или виброперемещений рельсов при
динамическом воздействии их с дефектным колесом.
Если при ударе колеса с ползуном глубиной 1,0 мм возникают
ускорения рельса порядка 200 (для грузового вагона в зимних условиях),
то на входе согласующего усилителя будет сигнал амплитудой 0,6÷1,8 В в
зависимости от коэффициента преобразования акселерометров,
подобранных в комплект ДИСК-К.
7.3. Индуктивные датчики в системе счета осей
Следующая группа датчиков характеризуется формированием
информационных сигналов о движении оси вагона путем амплитудной модуляции выходного напряжения ДСО. К их числу относятся датчики
индуктивного типа [20]. Чувствительным элементом датчика являются
катушки индуктивности, параметры которых изменяются при движении
колеса над ними. Катушки питаются переменным током. Выходной сигнал
датчика — амплитуда напряжения.
ДСО с использованием амплитудной модуляции имеют тот же
недостаток, что и датчик магнитного типа. Передаваемая ими информация
искажается под действием электромагнитных помех, следовательно, не
обеспечивается передача информации об осях на большие расстояния
(сотни метров, километры).
Потребность в передаче информационного сообщения на эти
расстояния вызвана активным внедрением на дорогах систем контроля
занятости перегона на основе ДСО. При этих системах датчики
устанавливаются на границах станции, а станционные блоки размещаются
в помещениях.
Датчик представляет собой две катушки индуктивности, монтируемые
по разным сторонам шейки рельса напротив друг друга. Катушки имеют
длину 600 мм и подключаются специальным антивибрационным кабелем к
блоку преобразования, размещенному в нескольких метрах от рельса. В
блоке формируется напряжение питания катушек и выходное напряжение
ДСО преобразуется в помехозащищенный сигнал.
При отсутствии колеса над датчиком выходное напряжение с катушек
индуктивности преобразуется в две частотные последовательности
импульсов. Выходы формирователей последовательностей согласуются с
соединительными проводами питания "счетного пункта". В станционной
части системы две частотные последовательности выделяются
фильтрами.
От движения колеса над датчиком изменяется коэффициент
взаимоиндукции и, в зависимости от направления движения, исчезает
90
одна или другая частотная последовательность. Формирователи "счетного
пункта" отключают частотные последовательности в процессе движения и
при остановках. В станционных счетчиках осей определяется пропадание
частотного сигнала, по которому устанавливается направление движения
и выполняется счет осей.
7.4. Многофункциональные датчики
Многофункциональный датчик (МФД) с частотно-модулированным
выходным сигналом разработан и эксплуатируется на Октябрьской
железной дороге. На основе МФД и специального электронного блока
преобразования сигнала (конвертера) изготовлены комплекты аппаратуры
для системы ДИСК-Б, информационная система контроля занятости
перегона, комплект аппаратуры для счета вагонов в отцепах.
Датчик имеет небольшие габариты (210х80х30), массу 700 г и содержит
14 транзисторов. Датчик работоспособен в широком температурном
диапазоне ( - 50… +650С), виброустойчив и герметичен, устанавливается
внутри колеи между шпал. Широкая поверхность датчика ориентирована к
зоне движения гребня посредством крепежного устройства массой 1,5 кг.
Небольшая потребляемая мощность (2 Вт) и выходные токовые импульсы
свыше 50 мА допускают установку датчика на расстоянии до 5 км от
системы автоматики. Для подключения датчика к системе достаточно двух
кабельных жил. По этим жилам подается питание и передается
информационный сигнал. Для установки датчика требуется несколько
минут и в ходе эксплуатации практически не обслуживается.
Для модуляции сигнала используются два электронных генератора.
Небольшие катушки индуктивности генераторов расположены вдоль
широкой поверхности датчика вблизи зоны движения гребня и разнесены
друг от друга на расстояние в несколько сантиметров. Движущийся над
поверхностью датчика гребень изменяет частоты генераторов и вызывает
изменение выходной частоты прямоугольных импульсов датчика. Схемное
решение датчика выполнено так, что совместно с частотной модуляцией
происходит модуляция длительности выходного импульса. Это
дополнительно повышает помехозащиту и информативность МФД. В
результате многолетней эксплуатации датчиков было установлено, что
для колес вагонов средняя градуировочная характеристика имеет вид,
показанный на рис.7.2. Использование зависимости выходной частоты от
положения оси колеса над датчиком расширяет информационные
свойства датчика, так как в процессе движения оценивается их взаимное
положение. Рассмотрим наиболее простой критерий определения прохода
оси над датчиком. Считаем, что ось прошла, если частота изменялась
относительно начального значения Fo как в большую, так и в меньшую
сторону.
91
Например, при движении колеса в сторону увеличения координаты L
происходит последовательное изменение частоты от Fo до значения F+,
затем снова снижается до значения Fo (центр оси совпадает с центром
датчика по вертикали) и, наконец, после уменьшения частоты до F- вновь
увеличивается до значения Fo. При движении колеса в другом
направлении изменение частоты происходит в обратном порядке.
Остановка колеса над датчиком определяется как длительное получение
частоты одного значения, например, Fост.
F
F+
F ост
F0
F-
Зона чуствитель ности МФД
l
Рис.7.2. Градуировочная характеристика многофункционального датчика с
частотно- модулированным выходным сигналом
Частотно-модулированный сигнал может обрабатываться средствами
вычислительной техники, так как достаточно просто преобразуется в код.
Однако существование большого количества систем, воспринимающих
сигнал о движении оси в виде импульса напряжения, потребовало для согласования с ними соответствующего преобразования.
Преобразование частотного сигнала МФД в импульс напряжения
происходит в конвертере, функциональная схема которого приведена на
рис. 7.3. Кроме предоставления информации об осях, в конвертере
предусмотрены другие информационные выходы, которые допускают
использование МФД в существующих и разрабатываемых системах.
92
Рис. 7.3. Схема преобразования частотного сигнала МФД
МФД запитывается от источника питания линии (ИПЛ) через
измерительный резистор Rи и двухпроводную соединительную линию. На
измерительном резисторе выделяется напряжение, определяемое током
потребления МФД и его выходными прямоугольными токовыми
импульсами.
Источник питания конвертоера (ИПК) формирует напряжение питания
для остальных элементов.
После прохождения импульсов через интегрирующую цепь (ИЦ)
прямоугольная последовательность преобразуется в пилообразную. Это
позволяет настроить компаратор (К) на оптимальный прием и через
гальваническую развязку (ГР1) формировать импульсы на входе порта
Р1.1 микропроцессорного контроллера (МК). МК обрабатывает
мгновенные значения частотного сигнала МФД за время, равное периоду
следования входных импульсов порта Р1.1.
Алгоритм обработка сигналов МФД включает в себя измерение текущих
значений периода и длительности импульсов, сравнение их с исходными
значениями и установление факта изменения (неизменности) частоты.
Каждый период в МК принимается решение о движении оси, для чего
сравниваются результаты обработки периода и длительности импульсов.
Окончательное решение принимается по результатам сравнений за несколько периодов. Такой способ эквивалентен обработке сигналов датчика
по нескольким каналам и создает информационно надежную систему. Во
время движения колеса над датчиком в МК отслеживаются изменения
выходной
частоты
датчика
на
соответствие
градуировочной
характеристики и определяется время движения гребня через зону
чувствительности МФД. После установления факта прохода колеса
93
формируется импульс напряжения оси, например, через разряд DO
регистра РГ.
Выходные информационные сигналы конвертера передаются в систему
через
гальванические
развязки
ГР2—ГР4,
выполненные
на
оптоэлектронных парах типа АОТ123. Выходной фототранзистор оптопары
управляется записью соответствующего бита в выходные разряды
регистра РГ.
Длительность импульса оси устанавливается программно. Для системы
ДИСК-Б нужен биполярный импульс длительностью, равной времени
движения гребня над датчиком. Формирование импульса другой
полярности на "Вых. 2". обеспечивается источником питания Е2 с
полярностью, противоположной Е1. После окончания импульса с "Вых. 1"
(в разряд DO установлен логический 0) в разряд D1 контроллер записывает логическую 1, формируя импульс противоположной полярности на
"Вых. 2". Длительность этого импульса также равна времени движения
колеса над датчиком. Для системы ДИСК-Б оба выхода объединяются.
В системах ГАЦ, учитывающих направление движения, второй выход
используется для указания направления движения. На этом выходе
импульс напряжения формируется синхронно с импульсом оси только в
случае движения в определенном направлении, например, с горки.
Третий выход "Вых. 3" конвертера предназначен для диагностики
работоспособного состояния МФД и конвертера со стороны системы. Вид
сигнала диагностики определяется конкретной системой. Представление
работоспособного состояния в виде логической 1 определено
требованием использования МФД в системах, обеспечивающих
безопасность движения.
После подачи напряжения питания и выхода МК на рабочие алгоритмы
в разряде D2 инвертируется бит синхронно с поступлением импульсов
датчика. Формирователь динамической единицы (ФДЕ) при поступлении
импульсов с разряда D2 регистра зажигает диод гальванической развязки
ГР4, устанавливая логическую 1 на "Вых. З". Прекращение появления
импульсов на выходе D2 приводит к установке логического 0 на "Вых. З",
свидетельствуя о нарушении работы конвертера или датчика.
Аппаратно-программные средства конвертера выявляют основные
отказы и информируют об этом систему. Нарушение функционирования
МФД может выражаться в изменении тока потребления или в
существенном отличии частот от значений, определенных градуировочной
характеристикой. Настройка компаратора и выбор определенных
параметров интегрирующей цепи выявляет отказы, выраженные через
изменения тока потребления датчика. Определение этого отказа, как и
выявление отказа от существенного изменения частоты, происходит в
микропроцессорном контроллере на программном уровне, позволяя МК
снимать посылку импульсов в разряд D2. Отказы в ИПЛ, ИПК, обрывы
94
соединительной линии и выход из строя компаратора также вызывают
появление сигнала о неработоспособном состоянии [20].
Позиционный отказ (например, из-за несанкционированного съема МФД
с рельса) обнаруживается в МК через изменения тока потребления или
частоты. Для этого разработаны крепежные устройства МФД,
обеспечивающие изменение одного из этих параметров при его
демонтаже. Введение сигнала с ФДЕ в цепь "Вых. 3" позволяет системе
получать сведения об отказах в работе МК при "зависании" программ или
выходе контроллера из строя (в этом случае прекращается изменение
значения бита в разряде D2). Исключению "зависаний" способствует
генератор сброса ГС, формирующий импульс сброса при "сбоях"
программы МК.
Основные элементы конвертера расположены на плате размерами
100х80 мм. Стабилизаторы источников питания выносятся на отдельную
металлическую пластину. В качестве МК используется микросхема
АТ89с51, позволяющая выполнять обработку сигналов МФД при
максимальных скоростях движения 50—70 м/с.
На основе МФД и конвертеров изготовлены, всесторонне испытаны и
введены в эксплуатацию комплекты аппаратуры для систем ДИСК-Б,
информационная система контроля занятости перегона, комплект
аппаратуры для счета вагонов в отцепах.
7.5. Индукционные электромагнитные путевые датчики
Чувствительным элементом датчика являются катушки индуктивности,
параметры которых (взаимная индуктивность) изменяются при движении
колеса над ним. Выходным сигналом датчика является амплитуда
переменного тока. В данной конструкции датчика переменное магнитное
поле, создаваемое передающей катушкой W1 (рис. 7.4), пересекает витки
приемной катушкой W2, расположенной на другой стороне рельса и
генерирует в ней ЭДС выходного сигнала.
Форма и расположение обоих катушек и их ферритовых сердечников
образуют два магнитных потока Ф1 и Ф2, проходящих через первичный
преобразователь (обмотку W2) в противоположных направлениях. При
отсутствии колеса преобладает поток Ф1, который и индуктирует выходной
сигнал в виде переменного напряжения Uвых.
95
Uвых
Рис. 7.4. Индукционный электромагнитный путевой датчик
Магнитный поток катушки, без учета магнитного потока рассеивания
(Фр), определяется выражением
Ф1
W1 I1 Sint
W1 I1 Sint
,
lст
lв
Rст Rв
ст S с т S в
(7.6)
где: Rст – суммарное магнитное сопротивление всех ферромагнитных
участков магнитопровода (по которым замыкается магнитный поток
пронизывающий обе катушки);Rв - магнитное сопротивление всех
воздушных промежутков по которым замыкается магнитный поток Ф1
пронизывающий
обе катушки; lст – длина ферромагнитных магнитопроводов; lв – длина
воздушных промежутков магнитопровода.
Подставляя значение уравнения 7.6 в уравнение 7.1, получим
уравнение для определения ЭДС, наводимой в обмотке W2 первичного
преобразователя магнитным потоком Ф1
е
К W 2 S К 2W1I1
Cost ,
l ст
lв
ст S ст S в
(7.7)
где: W1
- число витков передающей катушки (источника связующего
магнитного поля); W2 - число витков приемной катушки; S k 2 эквивалентная площадь катушки первичного преобразователя (приемной
катушки); - круговая частота; I1 - амплитудное значение переменного
96
тока передающей катушки; К 1 – коэффициент связи обмоток,
учитывающий соотношение магнитных потоков полного (с учетом потоков
рассеивания) и сцепляющегося с приемной катушкой.
Аналогично, с учетом своих составляющих воздушных промежутков и
ферромагнитных
магнитопроводов,
можно
определить
значение
магнитного потока Ф2 и ЭДС, наводимую этим потоком в катушке W2.
Если между катушками датчика проходит колесо, то его металлическая
масса изменяет направление и действует как экран для потока Ф1, который
уменьшается в катушке W2. Разность ЭДС в приемной катушке,
индуктируемых потоками Ф1 и Ф2, снижается до нуля, что и является
сигналом счета оси выдаваемого точечным путевым датчиком.
По такому принципу построены точечные путевые датчики в некоторых
системах СЦБ фирмы SEL. Для повышения безопасности в системах
железнодорожной автоматики, использующих счетчики осей для контроля
участков пути, применяют два последовательно расположенных датчика,
размещенных в общем корпусе. Такая конструкция датчика позволяет
повысить достоверность фиксации проследования каждой колесной пары
методом сравнения результатов и определить направление движения
подвижной единицы по последовательности их срабатывания.
Изменяя взаимное расположение передающих и приемных катушек, а
так же частоту генерируемого сигнала можно создать индукционный
электромагнитный путевой датчик, у которого при проходе колеса сигнал в
приемных катушках возрастет. По такому принципу построен датчик в
системе счета осей AzS 350 фирмы "SIEMENS".
7.6. Путевой датчик системы УКП СО
Путевой датчик (ПД) типа ДПЭП системы УКП СО является источником
первичной информации о количестве осей подвижного состава, которые
проследовали по участку пути, контролируемому датчиком занятости
участка пути (РЦ). Датчик [43, 20] представляет собой электромагнитную
систему с переменными параметрами, входным электрическим сигналом
которой является высокочастотное переменное напряжение генератора,
расположенного в аппаратуре счетного прибора (СП) [45]. Напряжение
выходного сигнала ПД зависит от параметров магнитной системы, которые
изменяются при появлении и проследовании колеса над датчиком.
Упрощенный чертеж, поясняющий принцип действия ПД, приведен на
рис.7.5. На питающий вход ПД подается высокочастотное переменное
напряжение Uген частоты fген = 71,4 кГц. На рельсе 1 условно показано
колесо 2 подвижного состава. Параллельно оси рельса 1 расположен
индуктор 3, по которому протекает ток iинд, создающий в пространстве
около рельса 1 и колеса 2 переменное магнитное поле. Это поле создает в
выходной катушке 4 напряжение Uвых, величина которого зависит от
97
магнитного сопротивления цепи между индуктором 3 и катушкой 4.
Отсутствие или наличие колеса в этом пространстве изменяет это
магнитное сопротивление и взаимоиндуктивность Ми-к между индуктором 3
и катушкой 4, что вызывает изменение величины выходного напряжения
датчика Uвых [47, 48].
Эквивалентная электрическая схема ПД, соответствующая рис. 7.5, а
приведена на рис. 7.5, б. Здесь емкость СЭ1 эквивалентно представляет
собой сумму емкостей С1 (см. рис. 7.5, а) и распределенной емкости жил
кабеля от ПД до СП, а емкость СЭ2 – эквивалентную емкости других жил
того же кабеля. Величина взаимоиндуктивности Ми-к, как было сказано,
зависит от наличия или отсутствия колеса над магнитной системой ПД
[49].
а
2
3
1
4
Uвых
б
Ми-к
iинд
TV
Uген
C1
w2
Uген
Cэ1
w1
iинд
wкат
Cэ2
Uвых
индуктор
w1
Рис. 7.5. Упрощенная конструкция и эквивалентная схема путевого датчика устройства
контроля перегона методом счета осей УКП СО
Согласование уровней токов и напряжений в электрической цепи
генератора и индуктора осуществляется при помощи трансформатора ТV.
Он выполнен на тороидальном ферритовом сердечнике. Его первичная
обмотка w1 содержит 20 витков, вторичная w2 – 1 виток. Для повышения
эффективности работы датчика в его входную цепь включен резонансный
контур, образованный индуктивностью обмотки w1 и емкостью
конденсатора С1, настроенный на частоту fген.
Таким образом, как видно из схемы рис. 7.5, если остальные
параметры схемы неизменны, то выходное напряжение Uвых датчика
определяется только величиной взаимоиндуктивности Ми-к, изменения
которой на величину Ми-к, вызванные наличием или отсутствием колеса,
98
приводят к появлению изменения напряжения выходной катушки ПД на
значение Uвых.
Наличие высокочастотного напряжения Uген и соответствующего ему
тока iинд в индукторе накладывает ряд особенностей на процессы работы
ПД. В первую очередь это вызвано тем, что металлические массы колеса
при воздействии на них переменного высокочастотного магнитного поля
изменяют свои магнитные свойства за счет увеличения потерь на
перемагничивание, гистерезис, проявление поверхностного эффекта и т.д.
Эти изменения приводят к тому, что наличие колеса в магнитной цепи
датчика становится эквивалентным внесению в нее массы, близкой по
свойствам алюминиевой (или, например, медной, латунной). Поэтому
имитатор колеса, используемый при технологических проверках ПД,
выполнен в виде алюминиевой пластины. Снижение частоты fген
напряжения питания датчика, при котором масса колеса будет проявлять
ферромагнитные свойства, нежелательно из-за значительного снижения
чувствительности датчика.
Практическая конструкция и электрическая схема путевого датчика
существенно сложнее. Это обусловлено двумя обстоятельствами. Первое
из них заключается в том, что изменения выходного напряжения Uвых,
обусловленные проследованием над выходной катушкой колеса, малы и
не превышают нескольких сотен милливольт при наличии постоянной
амплитуды переменного напряжения на выходе катушки Uвых =10…15 В.
Поэтому для надежного выделения столь относительно малого значения
напряжения Uвых применен дифференциальный способ выделения
полезного сигнала, что потребовало введения дополнительной выходной
катушки.
7.7. Заключение
В настоящее время на отечественных железных дорогах и за рубежем
в системах счета осей наибольшее распространение нашли индукционные
датчики, которые обеспечивают работоспособность в разнообразных
климатических условиях, при наличии мощных магнитных полей тягового
тока и полей тяговых двигателей и не оказывают заметного
биологического воздействия на окружающую среду.
Индукционные датчики в силу простоты их схемных и конструктивных
решений и, как следствие повышенной надежности являются наиболее
распространенным типом бесконтактного датчика и применяются на
железных дорогах многих стран в двух основных модификациях:
магнитоиндукционных (с источником связующего поля – постоянным
магнитом) и индукционных электромагнитных (с переменным магнитным
полем).
99
Существенный выигрыш по информационным и эксплуатационным
показателям может быть достигнут при использовании частотных
параметрических модуляторов в путевых датчиках. В датчиках такого
класса фиксация прохождения колесной пары осуществляется
изменением одного из параметров генератора (например, индуктивности
приемной катушки), что приводит к изменению частоты генерируемых
колебаний.
ЛЕКЦИЯ 8. СИСТЕМЫ ТЕХНИЧЕСКОГО КОНТРОЛЯ И
ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА
8.1. Диагностика технического состояния грузового поезда
В основе функционирования транзитного пункта ТО (ПТО) сетевого
значения
лежит
кардинальное
изменение
технологии
дефектоскопирования технического состояния грузовых вагонов. Работа
осмотрщиков вагонов заменяется использованием автоматизированных
систем неразрушающего контроля, осуществляющих определение
дефектов вагонов на ходу поезда при подходе к станции. При этом
отбраковка узла или детали вагона производиться автоматически без
участия оператора. Это накладывает жёсткие требования к надёжности,
быстродействию и условиям эксплуатации используемых диагностических
средств. На центральный пункт управления ПТО должны передаваться
данные от каждой диагностической системы. Далее по ним принимается
решение о необходимости ремонта или отцепки забракованного вагона.
Данные
о
параметрах
каждого
проконтролированного
поезда
регистрируются для последующего хранения, часть из них передаётся на
следующий СПТО, так как их наличие увеличивает достоверность
диагностирования многих дефектов.
Автоматизированные
диагностические
комплексы
контроля
технического состояния вагона на ходу поезда должны выявлять
следующие неисправности вагонов:
контроль температуры буксового узла и заторможенных колёс;
контроль волочения;
контроль габаритных размеров вагонов;
контроль дефектов колеса по кругу катания;
контроль геометрических параметров колеса;
контроль параметров ударно тягового механизма;
контроль неравномерности загрузки вагонов;
контроль сползания буксы с шейки оси.
100
8.2. Классификация диагностических систем контроля параметров
грузовых вагонов
8.2.1. Комплекс технических средств многофункциональный
Комплекс технических средств многофункциональный КТСМ-02
(рис.8.1) представляет собой систему автоматического контроля,
включающая в себя одну или несколько подсистем для обнаружения
дефектных узлов и деталей подвижного состава (например: букс, колес,
тормозов, габарита и т. д.). Основное назначение КТСМ-02 заключается в
контроле параметров подвижного состава, привязанных к конкретным
осям, или подвижным единицам, а также координации работы
подключенных к нему подсистем и обеспечении информационного
взаимодействия через систему централизации с системами контроля и
управления верхнего уровня (АСК ПС, ДНЦ, ДГП). Более подробно
ознакомление системы выполнено в лекции 9.
8.2.2. Система комплексного контроля технического состояния
подвижного состава на ходу поезда ДИСК-2
Автоматизированная
система
комплексного
контроля
второго
поколения ДИСК-2 предназначена для оснащения станций с целью
наиболее полного охвата контролем неисправностей подвижного состава.
В состав системы входят подсистемы для обнаружения перегретых букс
(ДИСК-Б); заторможенных колес (ДИСК-Т); волочащихся деталей (ДИСКВ); неровностей колес по кругу катания (ДИСК-К); отклонений верхнего
габарита подвижного состава (ДИСК-Г); перегруза или неравномерной
загрузки груза (ДИСК-3).
8.2.3. Автоматизированный бесконтактный комплекс контроля
колесных пар подвижного состава
Автоматизированный бесконтактный комплекс контроля колесных пар
подвижного состава предназначен для бесконтактного контроля и анализ
параметров колесных пар подвижного состава.
Параметры диагностики: толщина гребня колеса, разность и сумма
толщин гребней на колесной паре, равномерный прокат, расстояние
между внутренними гранями ободов колес, разность расстояний между
внутренними гранями ободов, толщина обода, ширина обода, диаметр
колеса, разность диаметров колес в одной колесной паре и в тележке, счет
количества осей, определение типа подвижного состава, определение
количества вагонов в составе, регистрация скорости движения поезда,
регистрация времени контроля, направление движения состава.
101
8.2.4. Система автоматизированного контроля механизма автосцепки
«САКМА»
Данная
подсистема
применяется
для
контроля
наличия
неисправностей автосцепных устройств, по причине которых может
произойти саморасцеп автосцепок грузовых вагонов на ходу поезда. Она
контролирует:
износ замков;
излом направляющего зуба;
излом предохранителя от саморасцепа;
износ замков, поверхностей контура зацепления, перемычки между
направляющим зубом и сигнальным отростком;
полуутопленное состояния замков;
трещины в большом и малом зубе, приводящие в режиме тяги
поезда к уширению зуба;
уширение зева.
В состав системы САКМА входят напольная камера; блок лазерных
излучателей; стойка сопряжения; компьютер для обработки информации в
помещении диагностического пункта; блок бесперебойного питания и
модем.
8.2.5. Автоматизированная система контроля открытых,
незафиксированных и деформированных люков и дверей вагонов
Система предназначена для контроля технического и коммерческого
состояния грузовых вагонов в прибывающих на станцию поездах. Система
автоматизированного анализа и обработки информации обеспечивает
автоматизированное выявление деформаций, открытых люков, качки и
других неисправностей на основе обработки и суммирования данных,
поступающих от камер и датчиков.
Система осуществляет отображение данных и сигналов тревоги в
прибывающих на станцию поездах на АРМ оператора, а так же
предоставляет возможность оператору осуществлять анализ технического
и коммерческого состояния грузовых вагонов по видеозаписи.
8.2.6. Детектор дефектных колес ДДК
Аппаратура ДЦК относится к напольным средствам автоматической
диагностики технического состояния вагонов на ходу поезда и
предназначена для выявления колёсных пар с дефектами на поверхности
катания колёс, вызывающих недопустимые динамические перегрузки
неподрессоренных элементов вагонов и пути.
Принцип действия аппаратуры ДЦК основан на измерении
специальными
тензометрическими
схемами
вертикальных
сил,
действующих между колесом и рельсом при их динамическом
102
взаимодействии, и сравнении измеренных значений с допустимыми
нормируемыми уровнями сил. Превышение нормируемого уровня
означает, что на поверхности катания колеса имеется неровность (или
несколько неровностей), вызывающая недопустимые динамические
перегрузки колёс и рельсов.
Сведения о наличии в составе поезда вагонов с колёсными парами,
подлежащими осмотру и браковке, передаются по линии связи на ПТО,
перед которым установлена аппаратура ДЦК, в виде текстового файла с
выходов специализированного компьютера, установленного на посту
диагностики.
Аппаратура ДЦК включает перегонное и станционное оборудование,
связанные между собой линией связи.
Напольное
оборудование
аппаратуры ДДК
размещается
в
непосредственной близости от помещения постового оборудования. При
этом сигналы от напольного оборудования по кабелю передаются к
постовому оборудованию.
Постовое оборудование аппаратуры ДДК состоит из двух электронных
блоков: тензометрического усилителя типа «Sрider-8» и контроллера
(специализированного компьютера).
Станционное
(приёмное)
оборудование
аппаратуры
ДДК
устанавливается непосредственно на ПТО станции прибытия. При этом
возможны два варианта станционного оборудования. Первый вариант
предусматривает конечный компьютер ДДК на ПТО с устройством печати
результатов контроля и звуковыми сигналами тревоги при обнаружении
колёсных пар с дефектами. По второму варианту вывод результатов
контроля с аппаратуры ДДК производится через локальную связь в
систему централизации информации от различных устройств диагностики
с выдачей оператору ПТО единого документа - смотрового листа.
8.2.7. Автоматизированный диагностический комплекс для измерения
колесных пар вагонов на подходах к станции
Данный комплекс предназначен для измерения геометрический
параметров поверхности катания, а также выявления износа и дефектов
цельнокатаных колес на ходу поезда, регистрации неисправностей
колесных пар и оперативной передачи полученной информации на
ближайший ПТО. Он контролирует параметры поверхности катания
колесных пар грузовых вагонов: толщину и высоту гребня, толщину и
ширину обода, диаметр по поверхности катания.
8.2.8. Устройство контроля сползания буксы с шейки оси
Автоматическое устройство контроля сползания буксы с шейки оси
предназначено для выявления на ходу поезда роликовых букс, имеющих
сползание корпуса с шейки оси, вследствие разрушения торцевого
103
крепления, регистрации таких букс и оперативной передачи полученной
информации на ближайший ПТО.
8.2.9. Устройство контроля тормозов поезда УКТП
Устройство УКТП предназначено для ускоренной зарядки и
опробования тормозов поездов на ПТО. Устройство производит
автоматическую регистрацию хода опробования тормозов и расчет
параметров тормозной системы состава и локомотива с выводом данных в
реальном времени на монитор, в сеть АСУ ПТО и на бумажный носитель в
виде графиков и по форме ВУ-45.
Устройство позволяет автоматизировать процессы подготовки
тормозов подвижного состава в парках отправления, осуществлять
контроль над качеством подготовки тормозов и соблюдением
технологической дисциплины в парке отправления.
Устройство обеспечивает:
обработку тормозов при подключении тормозной сети состава и
локомотива к питательным стационарным напольным колонкам,
располагаемым в междупутье парка отправления;
обработку тормозов состава;
контроль пневматической части тормозов локомотива;
непрерывный контроль на мониторе ПК за изменением утечки и
давления воздуха в тормозной магистрали состава;
регистрацию процессов подготовки тормозов;
выдачу на основе измеренных параметров рекомендаций по
ведению обработанного на маршруте с учетом местных инструкций и
состояний автотормозов состава;
создание пакета документов о работе ПТО (ВУ-45 и др.);
зарядку и опробование тормозов в полуавтоматическом режиме с
дистанционным
управлением
процессами
при
использовании
радиостанций.
Устройство включает в себя:
пульт оператора парка ПОП, имеющий в составе: персональный
компьютер ПК; принтер ПУ; блок связи БС; радиостанцию оператора РС;
пульт дистанционного управления ПДУ, подключенный к
радиостанции осмотрщика;
блок БС;
электрические коммуникации, предназначенные для обмена
информацией между блоками устройства и подачи питающего напряжения
на БПК;
блок питательной напольной колонки БПК;
пневматические коммутации, предназначенные для подвода воздуха
от напорной сети парка к БПК;
104
блок хвостового вагона БХВ, предназначенный для контроля
давления в тормозной магистрали хвостового вагона.
8.2.10. Комплексная информационно-измерительная система
технического диагностирования подвижного состава
В качестве примера разрядности комплексной системы технической
диагностики рассмотрим комплексную информационно-измерительную
систему ТО и ремонта колесных пар депо. Анализ порч и неисправностей
колесных пар подвижного состава на железнодорожном транспорте
показывает, что они существенно влияют на безопасность движения.
Именно поэтому техническое диагностирование и предупреждение отказов
в пути следования колесных пар является одним из важнейших факторов
обеспечения безопасности движения поездов.
Комплексная информационно-измерительная ТО и ремонта депо имеет
иерархическую структуру [53], содержащую три уровня (см. рис. 8.2).
Подвижной состав
автоматическое измерение
ручное измерение
при движении
АСОК
ПОНАБ
при ремонте
КИП
Шаблон
дефектоскоп
автоматический
ввод
Норматив.
показатели
ручной ввод
электронные паспорта вагонов
I уровень
Анализ
системы
Оптимизация ТО и ремонта
Норматив. показатели
Рекомендации по оптимизация
II уровень
(Лок. депо)
III уровень
(отделения и
управление
дороги)
Показатели
эффективности
Рис. 8.2. Комплексная система диагностики подвижного состава
Первый уровень структуры включает систему контроля параметров
колесных пар, выполняющую автоматическое измерение параметров при
движении подвижного состава, ручное измерение параметров колесных
пар
при ремонте и ТО. Автоматическое измерение параметров
комплексных
пар
выполняется
с
помощью
двух
подсистем:
автоматической системы обмера колесных пар (АСОК) и автоматической
системы обнаружения трещин и дефектов поверхности катания колесных
105
пар. Ручное измерение параметров колесных пар проводится с помощью
комплексного переносного измерителя параметров колесных пар (КИП),
шаблонов и дефектоскопии. Все подсистемы автоматического и ручного
измерения параметров колесных пар сопровождаются метрологическим
обеспечением. Выходная информация с указанных подсистем поступает
на программный комплекс контроля над нормативными параметрами
колесных пар и ведением электронных паспортов колесных пар. Причем
информация с подсистем ручного измерения вводится в программный
комплекс через устройства автоматического и ручного ввода данных.
Также в программный комплекс вводятся нормативные показатели.
Программный комплекс обрабатывает информацию, поступающую с
подсистемы
измерения
параметров
колесных
пар,
формирует
электронные паспорта на каждую колесную пару соответствующий
единицы подвижного состава, сравнивает результаты измерений с
нормативными показателями, систематизирует информационный поток и
организует базу данных для передачи на следующий уровень комплексной
системы. Кроме этого, программный комплекс через устройства
аварийного предупреждения о выводах параметров колесных пар за
пределы допуска подает соответствующие сигналы в подсистемы
измерения, а также формирует фразу текущих данных обследования
колесных пар для последующего использования при обработке и
прогнозировании в службах депо.
Второй уровень структуры (см. рис. 8.2) АРМ по колесным парам,
которое включает программный комплекс анализа состояния колесного
парка депо. В данный программный комплекс обязательно вводится
нормативные технические параметры обслуживания колесных пар.
Программный комплекс также организует БД для передачи на следующий
уровень структуры комплексной системы ТД, выдает информацию для
составления отчетных форм и через подсистему планирования
обслуживания колесных пар формирует соответствующие данные.
АРМ по колесным парам должно удовлетворять общим требованиям:
анализировать диагностическую информацию, используемую для
выполнения технико-экономических расчетов; оценивать качество
диагностирования
для
периодической
корректировки
методики
диагностирования с выработкой рекомендаций по срокам и объемам ТО и
текущего ремонта каждой единицы подвижного состава, по срокам
очередного контроля составления элементов соответствующей единицы
подвижного состава и др.
Третий уровень структуры состоит из программного комплекса
оптимизации ТО и ремонта колесных пар по критериям экономической
эффективности подсистемы контроля и управления ремонта колесных
пар.
106
8.3. Автоматизированная система контроля подвижного состава
Автоматизированная система контроля подвижного состава (АСК ПС)
предназначена для автоматизации процесса сбора, передачи и обработки
показаний аппаратуры контроля перегретых букс типа ПОНАБ, ДИСК и
КТСМ с целью обеспечения централизованного контроля технического
состояния поездов на участках движения. Контроль за показаниями
аппаратуры контроля перегрева буксовых узлов вагонов осуществляется
оператором центрального поста контроля АСК ПС регионального ЦУП.
При обнаружении в составе поезда вагона (локомотива) с повышенным
уровнем нагрева буксового узла на экране монитора появляется
информационное окно и раздается звуковой сигнал. В информационном
окне выводятся данные о показании установки ПОНАБ, КТСМ, ДИСК,
которые содержат: название пункта контроля, зафиксировавшего
повышенный нагрев буксового узла с указанием направления (четное,
нечетное), порядкового номера вагона в поезде, начиная с головы,
порядкового номера оси вагона, стороны вагона и уровня нагрева
буксового узла с каждой стороны вагона.
Комплекс технических средств АСК ПС представляет собой
распределенную структуру специализированных аппаратно-программных
комплексов, объединенных единой СПД. По своему функциональному
назначению технические средства АСК ПС подразделяются на
технические средства линейных пунктов контроля (ЛПК) и оборудование
центрального поста контроля (ЦПК).
В состав технических средств ЛПК входит: один или более
периферийных контроллеров ПК, предназначенных для сбора и передачи
показаний аппаратуры контроля ПОНАБ и ДИСК-Б в АРМы ЛПК и ЦПК
соответственно. Каждый ПК может осуществлять ввод информации от 4-х
приемных (станционных) стоек аппаратуры контроля типа ПОНАБ-3 или
ДИСК-Б.
Примерная структурная схема комплекса технических средств АСК ПС
приведена на рис.8.3.
107
АРМ ЦПК
Серв ер баз
данных
АРМ ЦПК
Локальная
в ычислительная сеть
ЛВС
Серв ер СПД
Сист ема передачи данных на базе концент раторов
информации КИ -6М (СПД)
КИ -6М
КИ -6М
КИ -6М
АРМ ЛПК
ПК-01
КИ -6М
КТСМ01
сигнализация и
опов ещение
ПК-01
АРМ ЛПК
КТСМ01
от ДИ СК,
ПОНАБ
Принтер
сигнализация и
опов ещение
от ДИ СК,
ПОНАБ
Принтер
Рис.8.3. Структурная схема АСК ПС.
Оборудование АСК ПС центрального поста контроля представляет
собой локальную вычислительную сеть (ЛВС), содержащую:
1) сервер БД - ЭВМ, функционирующую под управлением сетевой
операционной системы (ОС) и системой управления базами данных
(СУБД);
2) сервер СПД - ЭВМ, обеспечивающую информационный обмен между
сетью передачи данных и сервером ЛС , а также осуществляющую
контроль работы концентраторов СПД, периферийных контроллеров и
каналов информационной связи между ними;
3) рабочие станции (АРМы) - ЭВМ, на которых выполняется прикладная
программа "АРМ ЦПК" и использующие информацию, содержащуюся на
сервере БД.
Сервер СПД принимает, осуществляет обработку и помещает в файлы
информационных баз показаний аппаратуры контроля, размещенные на
файловом сервере ЛВС. Прикладные системы (АРМы ЦПК), включенные в
локальную вычислительную сеть диспетчерского центра, осуществляют
108
чтение информации из файлов баз показаний аппаратуры контроля для
выполнения
различных
задач
формирования
оперативных
и
статистических данных. Программное обеспечение АРМов ЛПК
дополнительно к прикладным задачам содержит функции сервера СПД по
управлению и диагностике устройств.
8.4. Функции информационно-управляющего комплекса АСУ СПТО
Автоматизация функций оперативного управления техническим
обслуживанием и ремонтом грузовых вагонов и функций взаимодействия с
пользователями линейного уровня включает в себя:
1. контроль за поездами, находящимися на линии;
2. планирование ТО и текущего ремонта;
3. информационная поддержка ТО и текущего ремонта;
4. автоматизация ведения учета и анализа производственной
деятельности;
5. автоматизация ведения учета запасных частей и материалов;
6. ведение
технологической,
нормативной
и
организационной
документации;
7. организация взаимодействия причастных работников линейных
предприятий.
8.5. Информационное взаимодействие АСУ СПТО с системами
технической диагностики технического состояния вагонов
АСУ ПТО функционирует, как одна из подсистем АСУ опорной станции,
работа которой осуществляется на единой БД и не требует специального
обмена информацией между смежными подсистемами. Взаимодействие с
АСУ дорожного и сетевого уровней обеспечивается по единым правилам
обмена:
на уровне прикладных задач на основе ведомственного протокола
информационного взаимодействия систем АСУЖТ (протокол обмена
сообщениями);
на транспортном уровне на основе протокола НТТР, являющегося
основным протоколом взаимодействия подсистем АСУ ОЦ.
Рассмотрим транспортный протокол взаимодействия АСУ опорной
станции (АСУ ОЦ) с системами технической диагностики.
Он обеспечивает вызов, запуск на выполнение, передачу и прием
данных от сервера приложений АСУ ОЦ. Обращение к серверу
приложений, оформление данных выполняется в соответствии со
спецификацией протокола НТТР.
В общем виде к серверу приложений формируется в следующем виде:
http:/serverd.pvrr.mps:88/Cart?par1=val1, где serverd – имя хоста, на котором
109
находится сервер приложений; pvrr.mps – имя интернет-домена, на
котором находится требуемый хост;
88 – номер порта, на который
настроен лисенер сервера приложений; Cart – название картриджа
(прикладной задачи сервера приложений).
Адресация абонентов в АСУ ОЦ основана на применении
идентификационных кодов (обозначений) называемых логическими
номерами.
Структура логического номера имеет вид - DD.LL.ХХХХ, где
DD - номер дороги в соответствии с единой сетевой разметкой,
LL - номер линейного района,
ХХХХ - уникальный номер рабочего места в данном линейном районе.
Идентификацию по логическим номерам имеют: АРМы; серверы
разных уровней АСУЛР; внешние системы (АСОУП, КГМ, и т.д.). Формат
входных сообщений с контрольно-диагностических устройств аппаратуры
ДИСК-2 и системы КТСМ состоит из служебной фразы, содержащей
информацию о поезде, и несколько информационных фраз, содержащих
данные о тревожных вагонах.
Структура служебной фразы имеет следующий вид:
:XXXX - код сообщения;
4 знака - адрес устройства;
1-4 знака - номер поезда;
1-4 знака - число осей в поезде;
1-3 знака - число вагонов в поезде;
ччмм - время захода поезда;
ччмм - время схода поезда.
Структура информационной фразы определяется номером Ю.
Однотипных фраз может быть несколько по разным вагонам, осям.
Структура фразы Ю1 (износ колеса) состоит из: 2 знака – тип фразы;
1-3 знака - порядковый номер вагона (без учета головного локомотива); 1
знак – тип вагона (1 - холодный локомотив, 2 – пассажирский вагон, 3 –
грузовой вагон); 1-2 знака – количество осей в вагоне; 1-2 знака - номер
оси (в пределах вагона); 1-2 знака – длина неровности (в мм); 1-2 знака –
глубина неровности (в мм); 1-2 знака – уклон неровности (в мм); 1 знак тип износа (1 – ползун, 2 – навар, 3 – неравномерный прокат, 4 – тонкий
гребень, 5 – тонкий обод); 1 знак – уровень тревоги (1 – Т0, 2 – Т1, 3 – Т2).
Структура фразы Ю2 (уровень нагрева буксы, ступицы) включает в
себя: 2 знака – тип фразы; 1-3 знака - порядковый номер вагона; 1 знак –
тип вагона; 1-2 знака – количество осей в вагоне; 1-2 знака - номер оси; 1
знак – нагрев левой буксы; 1 знак – нагрев правой буксы; 1 знак – нагрев
левой ступицы; 1 знак – нагрев правой ступицы; 1 знак – уровень тревоги
левой буксы; 1 знак – уровень тревоги правой буксы; 1 знак – уровень
тревоги левой ступицы; 1 знак – уровень тревоги правой ступицы.
110
Структура фразы Ю3 (нарушение габаритов) содержит следующую
информацию:
2 знака – тип фразы; 1-3 знака - порядковый номер вагона; 1 знак – тип
вагона; 1-2 знака – количество осей в вагоне; 1 знак – верхний габарит; 1
знак - левый габарит; 1 знак – правый габарит; 1 знак – волочение (левый
наружный); 1 знак – волочение (левый внутренний); 1 знак – волочение
(правый внутренний); 1 знак – волочение (правый наружный).
Структура фразы Ю4 (неравномерность загрузки вагона) имеет:
2 знака – тип фразы; 1-3 знака - порядковый номер вагона; 1 знак – тип
вагона; 1-2 знака – количество осей в вагоне; 3 знака – вес вагона в
тоннах; 3 знака - процент неравномерности по тележкам; 3 знака процент неравномерности по сторонам; 1 знак – уровень тревоги.
Структура фразы Ю5 (уровень тревоги по тормозам) состоит из:
2 знака (Ю4) – тип фразы; 1-3 знака (--1) - порядковый номер вагона; 1
знак (1) – тип вагона; 1-2 знака (-1) – количество осей в вагоне; 1 знак (1) –
уровень тревоги по тормозам.
Структура фразы Ю6 (уровень бальности вагона) имеет:
2 знака – тип фразы; 1-3 знака - порядковый номер вагона; 1-5 знаков –
уровень бальности.
Структура фразы Ю7 (уровень сползания буксы с оси колеса)
состоит: 2 знака – тип фразы; 1-3 знака - порядковый номер вагона; 1-2
знака – номер оси; 1 знак – сторона вагона;1 знак или 1знак, 1знак (через
запятую) – размер сползания.
8.6. Заключение
Применение комплексных систем ТД подвижного состава позволяет
повысить безопасность движения за счет выработки рекомендаций об
индивидуальных объемах ремонта каждой единицы подвижного состава с
учетом действительного технического состояния. Экономический эффект
от внедрения указанной системы можно представить в виде трех
составляющих. Первая составляющая – экономический эффект,
реализуемый на сетевом уровне. Он связан с безопасностью движения, с
уменьшением затрат энергии и топлива на тяговое усилие локомотивов,
уменьшение числа повреждений стрелочных переводов и динамических
нагрузок на путь. Вторая составляющая – экономический эффект,
реализуемый в дело и обусловленный снижением затрат на ТО. Третья
составляющая – экономический эффект, реализуемый в дело и связанный
с повышением срока службы подвижного состава. Например, по данным
опыта эксплуатации систем контроля и паспортизации колесных пар в
США при профилактике достижения 50%-ного износа гребня бандажей
колес срок службы или пробег колесной пары повышается на 20%.
111
Наиболее сложным этапом при построении комплексных систем ТД
является выделение групп элементов, подлежащих диагностированию, и
недиагностируемых.
Для
такой
классификации
целесообразно
использовать технико-экономические критерии. В число диагностируемых
включаются те элементы подвижного состава, исправность которых в
наибольшей
степени
обеспечивает
безопасность
движения
и
работоспособность каждой единицы подвижного состава.
К недиагностируемым элементам каждой единицы подвижного состава
относится оборудование, диагностирование которого экономически
нецелесообразно или технически невозможно. Недиагностируемые
элементы должны иметь высокий уровень безопасности, несущественное
влияние отказов на работоспособность подвижного состава, небольшие
материальные затраты на устранение отказов.
ЛЕКЦИЯ 9. СИСТЕМЫ ОБНАРУЖЕНИЯ ПЕРЕГРЕТЫХ БУКС НА ХОДУ
ПОЕЗДА
9.1. Назначение и принцип работы аппаратуры
При движении поезда из-за трения подшипника об ось выделяется
тепло, которое рассеивается несколькими путями: через шейку оси на
колесо и ось и через подшипник на корпус буксы. При неисправностях
подшипников температура повышается. Поэтому работоспособность
буксовых узлов определяется главным образом температурой нагрева
подшипников и шейки оси. От нее зависят значения внутренних зазоров,
несущая способность баббита, вязкость и срок службы смазки и пр.
Значит
для обеспечения нормальной
работы
и
контроля
работоспособности необходим расчет температурного режима буксовых
узлов при различных условиях теплопередачи. Эту задачу можно решить с
помощью автоматизированной системы контроля состояния буксовых
узлов (ПОНАБ, ДИСК, КТСМ). Общий принцип работы таких систем
заключается в восприятии чувствительными элементами (приемниками)
импульсов инфракрасной энергии, преобразовании их в электрические сигналы, а также формировании информации о наличии и расположении
больных букс в поезде.
Устройства считывания и обработки первичной информации состоит из
напольного и постового оборудования (см.рис. 9.1).
112
П1
П2
П3
ВД3
П4
П5
ВД5
Н
КЛ
О
ВД1
ДГ
ВД6
ВД4
ВУ
НКЛВ
ВД2
НКПВ
НК
ПО
УТС
ФСНГ
РЦ
ЭП
КС АДП
ФИСО
КСВД
СП
Рис. 9.1. Структура аппаратуры ДИСК
Напольное оборудование включает: основные и вспомогательные
напольные камеры левые (НКЛО, НКЛВ) и правые (НКПО, НКПВ); датчики
прохода колес П1-П5; рельсовую цепь наложения (РЦН), выполненную в
виде ЭП; датчик габарита ДГ, вибродатчики ВД1– ВД6; виброусилитель ВУ
(см. лекцию 7).
В функции постового оборудования входят: преобразование ряда
контролируемых параметров подвижного состава в электрические
величины,
усиление
и
обработка
сигналов
от
первичных
преобразователей, выделение сигналов от перегретых букс и сигналов
отметки прохода подвижных единиц, формирование команд управления на
аппаратуру передачи данных. При отсутствии поезда на участке контроля
с РЦН выдает сигнал начальной установки на устройства перегонной
части аппаратуры. В этом случае аппаратура находится во включенном
состоянии, но заслонки напольных камер закрыты и аппаратура находится
в ждущем режиме. При приближении поезда к участку контроля
шунтируется РЦН и блок вырабатывает команду начала контроля, по
которой открываются заслонки напольных камер, снимается сигнал
запрета с устройств постового оборудования. Аппаратура вырабатывает
сигнал наличия поезда на участке контроля. Все указанные операции заканчиваются до момента захода первого колеса локомотива в зону
действия датчика П1.
При проходе колесных пар подвижного состава в зоне, образованной
датчиками П1 и П3, оптическая система каждой напольной камеры
«осматривает» стенки букс снизу вверх в полосе шириной около 80 мм.
Инфракрасная энергия, излучаемая корпусами буксовых узлов,
воспринимается болометрами и преобразуется в импульсные электричес113
кие сигналы, которые усиливаются предварительными и оконечными
усилителями. Амплитуда каждого сигнала пропорциональна уровню
инфракрасной энергии. После прохода второго колеса над датчиком П2
аппаратура вырабатывает команду, по которой в устройствах логической
обработке сигналов (УЛОС) осуществляется сравнение амплитуд двух
сигналов от букс методом «отношения» для каждой из сторон поезда. При
превышении отношения амплитуд - заданного порогового значения УЛОС
вырабатывает сигнал «тревоги», который поступает на схему накопления.
С выхода блока отметки вагонов (ОВ) выдается сигнал отметки прохода
физической подвижной единицы в момент, когда последнее по ходу
движения колесо находится над датчиком П5. Сигналы отметки прохода
подвижных единиц подаются в счетчик ОВ, где подсчитывается их
количество. Информация о текущем значении порядкового номера вагона
в поезде хранится в блоке счетчика вагонов (БСВ) в двоично-десятичном
коде.
Если в момент прохода по участку контроля очередного вагона
устройство УЛОС левой (правой) стороны поезда вырабатывает сигнал
«тревоги», то в момент отметки прохода этого вагона вырабатывается
сигнал «тревоги». Последний подает команду на передачу информации о
порядковом номере вагона с перегретой буксой и о стороне поезда, где
эта букса размещается (информация о «больном» вагоне).
При удалении хвостовой части поезда с участка контроля
вырабатывается команда, по которой закрываются заслонки напольных
камер и запускаются программа проверки аппаратуры (ППА). С помощью
этой программы имитируется проход колесных пар вагона над датчиками
П1—П5. Одновременно сигналы подаются на лампы напольных камер.
Лампы жестко закреплены на внутренней поверхности каждой из заслонок
напольных камер. После закрытия заслонок лампы находятся в зоне
обзора оптических систем приемных капсул. В момент кратковременного
их включения по сигналам с ППА инфракрасная энергия, излучаемая
лампами, воспринимается болометрами, преобразуется в электрические
сигналы. Уровень воспринимаемой болометрами энергии излучения ламп
значителен и достаточен для того, чтобы УЛОС выработало сигнал
«тревоги» вне зависимости от отношения амплитуд сигналов от пары
имитируемых букс.
Если все основные функциональные устройства аппаратуры исправны,
то в режиме автоматической проверки их работоспособности по сигналам
с ППА блок ОВ вырабатывает сигнал отметки прохода контрольного
(больного) вагона.
По окончании контроля исправности аппаратуры на АПД выдается
сигнал «конец поезда» КП, по которому передаются общие данные о
поездке (количество вагонов, количество перегретых букс и результат
114
автоконтроля). Работа аппаратуры до захода в зону контроля следующего
поезда переходит в ждущий режим.
9.2. Напольное оборудование аппаратуры обнаружения
перегретых букс
Датчики П1-П5 вырабатывают электрические сигналы при проходе
колесных пар подвижных единиц в зоне их размещения. Сигналы от
датчиков подаются через соединительные муфты к устройствам постового
оборудования. Конструкция и принцип действия датчиков рассмотрены в
лекции 7.
Основные напольные камеры (левая - НКЛ и правая - НКП),
установлены на участке контроля по обе стороны колеи под углом 130 к
оси пути. Оптическая система напольных камер ориентирована на задние
по ходу движения поезда стенки корпусов букс. При открытых заслонках
напольных камер приемные капсулы вырабатывают электрические
сигналы величиной, пропорциональной перепадам уровня теплового
излучения от корпусов букс и других элементов подвижного состава,
попадающих в поле зрения болометра. Тепловые сигналы левой и правой
приемных капсул (ТСЛ и ТСП соответственно) поступают через
регуляторы уровня, расположенные в блоке БСУ-П, в модуль обработки
тепловых сигналов МОТС периферийного контроллера ПК-02.
Напольная камера служит для приема инфракрасного излучения и
содержит
узконаправленную
оптическую
систему,
болометр,
предварительный усилитель сигналов, запирающую заслонку и другие
элементы конструкции (рис.9.2).
В состав напольной камеры аппаратуры входят наружный
обогреватель 2, корпус 9, приемная капсула 10, основание 14 и две опоры
15. Корпус напольной камеры имеет в верхней части передней стенки окно
для пропускания инфракрасного излучения от букс, перекрываемое
заслонкой при отсутствии поезда в зоне контроля. В окне укреплено
обрамление из водоотталкивающего материала для предотвращения
примерзания заслонки к корпусу камеры. Управление заслонкой
осуществляется через тяги от электромагнита 4. Возвращается заслонка в
исходное состояние после прохода поезда по участку контроля за счет
пружины. На внутренней стороне заслонки установлена на специальном
кронштейне лампа контроля 3 (рис. 3.2).
Для вентиляции внутренней полости корпуса в летний период в
верхней части боковых стенок корпуса имеются по четыре аэрационных
окна 7 с пылеулавливающими фильтрами. За счет вентиляции полости
корпуса
115
Рис. 9.2. Напольная камера аппаратура
удается избежать выпадения влаги на линзу оптической системы и другие
узлы напольной камеры, а также снизить температуру внутри камеры при
нагреве корпуса за счет солнечной радиации. С этой же целью в верхней
части корпуса установлен теневой щиток 8. В зимний период года
аэрационные окна корпуса камеры закрываются заглушками. Корпус
напольной камеры крепится к основанию шарнирным соединением 12 и
специальным замком, расположенным в передней части корпуса.
Шарнирное соединение позволяет открыть напольную камеру без
отделения корпуса от основания или полностью отделить корпус от
основания, чем обеспечивается доступ к узлам напольной камеры.
Положение корпуса в закрытом состоянии фиксируется двумя
направляющими, расположенными в передней части основания. На
лицевой панели приемной капсулы 10 установлены невыпадающие
крепежные винты, направляющие стержни и узел крепления болометра 6.
С помощью направляющих стержней приемная капсула устанавливается
на специальной призме так, чтобы ось оптической системы болометра
была расположена под углом 34° к плоскости основания. После установки
она крепится к призме двумя винтами. По обеим сторонам приемной
капсулы на основании установлены два узла ввода кабелей 16. Основание
напольной камеры 14 устанавливается на четырех специальных винтах
13, которые крепятся к двум опорам 15 (по два винта на каждой опоре) и
амортизаторах 11. Наружный обогреватель 2 напольной камеры
предназначен для защиты входного окна от заносов снегом и покрытия его
льдом. Он также предотвращает попадание снега и пыли на приемную
116
оптику капсул при открытой заслонке напольной камеры. При понижении
температуры внутри корпуса напольной камеры ниже значения,
установленного регулятором, контакты термодатчика замыкаются и
напряжение 24 В с трансформатора подается на нагревательные
элементы. Когда температура внутри напольной камеры достигает
установленного на термодатчике значения, контакты его размыкаются и
реле отключается.
Рельсовая цепь наложения предназначается для выработки команд
управления в момент захода и удаления поезда из зоны контроля
аппаратуры. В качестве РЦ наложения в аппаратуре можно использовать
типовую электронную педаль ЭП-1, разработанная конструкторским бюро
Главного управления сигнализации и связи МПС для аппаратуры
автоматической переездной сигнализации.
Педаль типа ЭП-1 представляет
собой
генератор
и
приемник,
которые подключаются к рельсам и
образуют короткую бесстыковую
рельсовую цепь тональной частоты
(рис. 9.3).
Генератор электронной педали
состоит из задающего каскада с самовозбуждением, собранного на
транзисторе ТЗ, и двухтактного
усилителя мощности, выполненного
на транзисторах: Т1 и Т 2.
Задающий каскад на транзисторе ТЗ выполнен по схеме с общим
эмиттером и положительной обратной связью для создания незатухающих
Рис.9.3. Принципиальная схема ЭП-1
колебаний.
В коллекторную цепь транзистора ТЗ включен колебательный контур,
состоящий из трансформатора Тр1 и конденсатора С7. Контур настроен на
частоту 5000 Гц. Генерируемые электрические колебания с вторичных
обмоток 5—6 и 7—8 трансформатора Тр1 подаются на вход двухтактного
усилителя мощности. Нагрузкой усилителя является выходной
трансформатор Тр2. Усиленные электрические колебания с вторичной
обмотки 5—6 трансформатора Тр2, являющегося одновременно согласующим с низкоомным сопротивлением РЦ, через фильтр, состоящий из
дросселя Др1 и конденсатора С2, подаются в РЦ (к первому и второму
рельсам). Фильтр Др1—С2 настроен на частоту 5 кГц и служит для защиты
трансформатора Тр2 от токов электротяги и РЦ АБ.
Приемник
электронной
педали
состоит
из
повышающего
трансформатора ТрЗ и выпрямительного моста, собранного на диодах
Д1—Д4.
117
Генератор и приемник ЭП-1 подключаются к рельсам на расстоянии 1
м. Зона действия рельсовой цепи около 50 м. Напряжение питания ±12 В.
При работе на номинальную нагрузку (последовательно соединенные
индуктивность 0,04 мГ и сопротивление 1,5 Ом) педаль ЭП обеспечивает
не менее 0,6 В пни максимальном потребляемом токе не более 100 мА.
Напряжение на выходе приемника педали при нагрузке 3 кОм не менее
10В. Генератор и приемник конструктивно выполнены в одном корпусе.
9.3. Комплекс технических средств КТСМ
Комплекс
технических
средств
КТСМ-01Д
предназначен
для
модернизации находящейся
в эксплуатации аппаратуры
обнаружения
перегретых
букс типа ПОНАБ-3 и ДИСКБ
путем
замены
электронных
блоков
в
стойке
перегонной
на
технические
средства
КТСМ-01Д.
При
модернизации
напольное оборудование и
силовой отсек стойки перегонной сохраняются.
Рис. 9.3. Внешний вид КТСМ
Станционное
оборудование
модернизированной
аппаратуры
полностью заменяется и состоит из концентратора информации КИ-6М и
комплекта АРМ оператора линейного поста контроля АРМ ЛПК
(персональная ЭВМ типа IBM PC). Указанный комплект станционного
оборудования является составной частью автоматизированной системы
контроля подвижного состава АСК ПС. АРМ ЛПК поддерживает функции
речевого оповещения и включения сигнализации, а один концентратор
информации КИ-6М обеспечивает прием информации от четырех КТСМ-01
[53].
В состав комплекса входят:
− контроллер
периферийный
ПК-02ПД,
представляет
собой
устройство с микропроцессорным управлением и является основным
устройством
комплекса,
которое
обеспечивает
электрическое
согласование с напольным и силовым оборудованием аппаратуры ДИСКБ, ПОНАБ-3, а так же выполняет все «интеллектуальные» функции по
обработке сигналов.
118
− технологический пульт ПТ-03, предназначенный для диалогового
тестирования и настройки комплекса и напольного оборудования
обслуживающим персоналом в процессе ТО, использование ПТ позволяет
практически отказаться от применения контрольно-измерительных
приборов и значительно упростить проведение регламентных работ по
обслуживанию перегонного оборудования;
− датчик температуры наружного воздуха;
− комплект эксплуатационных документов и ЗИП.
В режиме централизации контроля, когда сбор информации о нагреве
букс производится с нескольких линейных пунктов контроля,
информационное взаимодействие КТСМ-01Д с АРМом центрального поста
контроля осуществляется через СПД на базе концентраторов информации
КИ-6М.
КТСМ-01Д обеспечивает:
− выявление перегретых букс с температурой шеек осей выше 700С;
− подсчет общего количества вагонов в контролируемом поезде - до
200; количество осей в вагоне - до 32; количество уровней квантования
теплового сигнала – 70;
− определение перегретых букс при диапазоне скоростей движения
поездов по участку контроля от 5 км/час до 200 км/час;
Передача (прием) информации осуществляется методом частотной
манипуляции со скоростью 1200 бит/с, по двухпроводной физической
линии связи длиной до 40 км или выделенному каналу тональной частоты.
Выявление перегретой буксы производится как по величине теплового
уровня относительно температуры боковины тележки, так и по
дополнительному признаку в виде отношения величины теплового уровня
корпуса буксы к среднему значению тепловых уровней от остальных букс
вагона для каждой стороны вагона.
Дополнительно КТСМ-01Д осуществляет:
− определение нагрева шкивов в пассажирских вагонах;
− определение среднего теплового уровня на каждую сторону поезда
с целью контроля работы тепловых трактов;
− восстановление счетчика вагонов в случае сбоя по одному из
датчиков счета осей;
− контроль состояния каждого из датчиков счета осей;
− определение типа подвижной единицы (локомотив, пассажирский
или грузовой вагон);
− определение максимальной и минимальной скорости прохода
контролируемого поезда;
− определение скорости каждого вагона на контрольном участке;
− подсчет общего количества осей в поезде;
− автоматическую и дистанционную диагностику работы всех
составных частей комплекса и напольного оборудования;
119
− контроль момента открытия / закрытия заслонок;
− контроль температуры наружного воздуха;
− накопление и хранение информации о проконтролированных
поездах при отказе канала связи с дальнейшей передачей накопленной
информации после восстановления.
Во время прохода вагонных тележек контролируемого поезда через
поле зрения приемников ИК-излучения тепловые сигналы ТСЛ и ТСП
многократно преобразуются в восьмиразрядный двоичный код модулем
МОТС и запоминаются в оперативной памяти ПК. После прохода каждой
тележки центральный процессор ПК, производит обработку результатов
преобразования по специальному алгоритму и принимает решение о
степени аварийности проконтролированных букс с учетом показаний
датчика температуры наружного воздуха ДТНВ (рис. 9.4).
Рис. 9.4. Структурная схема комплекса КТСМ-02
Модуль МОПД периферийного контроллера по сигналам датчиков
прохода осей осуществляет отсчет порядковых номеров осей и вагонов, а
также определяет моменты начала и окончания прохода в поле зрения
приемников ИК-излучения колесных пар, тележек, вагонов и поезда.
Полученную информацию модуль МОПД передает центральному
процессору.
Если центральный процессор ПК принял решение о необходимости
выдачи сообщения о степени аварийности буксы, то он начинает передачу
в линию связи информации о вагоне, в котором обнаружена дефектная
120
букса. После выхода поезда из зоны действия РЦН по сбросу сигнала РЦ
ПК передает в линию связи информацию о проконтролированном поезде.
Информация по линии связи поступает в концентратор информации
системы СПД, а затем в АРМ ЦПК для последующей обработки,
накопления, отображения и регистрации. Из АРМ ЦПК в ПК по линии связи
периодически передаются пороговые значения тепловых уровней.
Центральный процессор ПК производит сравнение тепловых сигналов от
букс контролируемого поезда с последними принятыми от АРМа ЦПК
значениями тепловых уровней и производит передачу информации о
проконтролированном вагоне только в случае превышения значений этих
уровней.
В интервалах между поездами обслуживающий персонал может
проводить проверку и регулировку оборудования с использованием
технологического пульта ПТ. С помощью клавиатуры пульта ПТ подаются
команды периферийному контроллеру ПК на выполнение операций по
управлению заслонками и контрольными лампами напольных камер.
Периферийный контроллер в свою очередь выводит на индикатор
технологического пульта контрольную информацию, а также результаты
измерений параметров приемоусилительных трактов и данные о
состоянии путевых датчиков.
Блок сопряжения и управления БСУ предназначен для согласования
входных цепей и цепей управления ПК-02 с выходными цепями и схемами
управления аппаратуры. Помимо согласования БСУ осуществляет
дополнительную гальваническую развязку электрических цепей РЦН и
питания ЭП-1 между БСУ и ПК, для которых используется напряжение 24
В силового щита аппаратуры ПОНАБ-3.
При заходе поезда на участок контроля блок БСУ формирует сигнал
захода поезда, который поступает на вход оптронной развязки модуля
МОПД контроллера ПК. Под воздействием этого сигнала модуль МОПД
передает команду «заход поезда» и переходит в режим отметки вагонов.
Открытие заслонок в напольных камерах при заходе поезда
производится модулем МОПД. После приема команды «Заход поезда» ПК
блокирует ввод команд с клавиатуры пульта, сбрасывает включенные
ранее с пульта режимы, отключает режим автокомпенсации постоянной
составляющей приемно-усилительных трактов и переходит в режим
контроля буксовых узлов подвижного состава.
121
При проходе первой колесной пары поезда над датчиком Д2 ПК
формирует строку данных о заходе поезда на участок контроля для
передачи в АРМ ЦПК и выводит на индикатор ПТ информацию о времени
захода поезда в виде: «1235», где первая и вторая цифры соответствуют
десяткам и единицам часов, третья и четвертая цифры соответствуют
десяткам и единицам минут.
При движении поезда в правильном направлении каждая колесная
пара подвижного состава проходит поочередно над датчиками прохода
осей Д1, Д2 и Д3. Сигналы по цепям «Д1», «Д2» и «Д3» в той же
последовательности через блок БСУ поступают на входы формирователей
модуля МОПД периферийного контроллера. Приняв последовательность
сигналов МОПД переходит в режим отметки осей и вагонов. Если
последовательность сигналов отличается от приведенной выше
(движение поезда в неправильном направлении), то отметка осей и
вагонов модулем МОПД не производится. Отметка вагона производится
модулем МОПД по сигналам от датчиков Д1 и Д3, сигнал от датчика Д2
используется для восстановления отметки вагона после сбоя.
По сигналам от датчиков Д1, Д2 и Д3 (рис9.4) модуль МОПД производит
подсчет количества осей в поезде. Результат подсчета количества осей,
прошедших над каждым датчиком, по окончании контроля поезда
передается в модуль ПК.
По сигналам от датчиков Д2 и Д3 модуль МОПД передает команды
управления каналами тепловых сигналов модуля МОТС. При заходе
первой колесной пары тележки в зону действия датчика Д2 модуль МОПД
передает команду «Начало строба», по которой начинает производиться
считывание тепловых сигналов с периодом равным 1 мс, а также
определение максимального значения сигналов от букс по каждой
стороне. При заходе колесной пары тележки в зону действия датчика Д3
модуль МОПД передает команду «Конец строба», по которой ММК
записывает в память максимальные значения сигналов от букс и
переходит в режим определения минимального значения тепловых
сигналов от боковин тележки по каждой стороне до момента захода
следующей колесной пары тележки в зону действия датчика Д2. По
сигналу «Д3» от последней колесной пары тележки ММК прекращает
считывание тепловых сигналов.
При заходе остальных колесных пар тележки в зону действия датчика
Д2 модуль МОПД передает команду «Начало строба», по которой ММК
записывает в память минимальные значения сигналов от боковин тележки,
переходит в режим поиска максимального значения сигналов от букс по
каждой стороне и продолжает считывание тепловых сигналов.
При заходе последней колесной пары вагона в зону действия датчика
Д3 модуль МОПД передает команды «Конец строба» и «Отметка вагона».
После приема команды «Отметка вагона» ММК производит обработку
122
записанной в памяти информации и формирует блок данных о вагоне. В
процессе обработки сравнивается, уровень теплового сигнала от каждой
буксы с уровнем, принятым от АРМа ЦПК, если уровень теплового сигнала
хотя бы одной буксы в вагоне превысит нормативный уровень, то ПК
передает блок данных о вагоне в АРМ ЦПК.
В процессе прохода поезда по участку контроля ПК выводит на
индикатор пульта информацию следующего вида:
«02 024 04», где «02» - количество локомотивов в поезде на текущий
момент контроля (от 00 до 99); «024» - порядковый номер
проконтролированной подвижной единицы в поезде (включая локомотивы,
до 200); «04» - количество осей в проконтролированной подвижной
единице (до 32).
После освобождения поездом РЦН МОПД формирует контрольную
программу, представляющую собой имитацию прохода одного
четырехосного вагона с тепловыми сигналами. При установлении сигнала
«КРЦ» МОПД запускает программный таймер на интервал времени 6 - 8 с
(время переходного процесса в каналах тепловых трактов), затем МОПД
выдает команду «Начало строба», проверяет состояние сигналов контроля
заслонок левой камеры и правой камеры.
По окончании контрольной программы модуль МОПД передает команду
окончания контроля поезда и переходит в режим автодиагностики. Приняв
команду окончания контроля поезда ММК формирует и передает в линию
связи строку данных о поезде, переходит в режим автодиагностики и
выводит на индикатор пульта информацию о поезде:
«1239 056 0 06 08», где «1239» - время окончания контроля поезда
(часы и минуты, в данном примере 12 ч 39 мин); «056» - минимальная
скорость прохода поезда по участку контроля в км/ч (в данном примере 56
км/ч); «0» - признак сбоя отметки вагонов модуля МОПД («1» - был сбой
отметки вагонов, «0» - нет сбоев отметки вагонов); «06» - средний
тепловой уровень на поезд по левой стороне (от 0 до 70); «08» - средний
тепловой уровень на поезд по правой стороне (от 0 до 70).
Включение регулировочных режимов производится обслуживающим
персоналом вводом соответствующих команд с клавиатуры пульта ПТ.
Информативность и достоверность показаний в КТСМ повышается за
счет применения более совершенных методов обработки и передачи
данных. При использовании традиционного метода измерения амплитуды
уровня теплового сигнала состояние контролируемого буксового узла
оценивается более дифференцированно по 70 уровням нагрева (для
сравнения в аппаратуре ДИСК-Б 39 уровней). Кроме того, в аппаратуре
КТСМ использован дополнительный информативный параметр. Он
характеризует соотношение текущего значения амплитуды теплового
сигнала и среднего. Это позволяет производить слежение за динамикой
нагрева буксового узла в течение длительного времени на протяженном
123
участке движения поезда, а следовательно обнаруживать буксовые узлы
на ранней стадии развития дефекта.
При дальнейшем совершенствовании была создана система КТСМ-02.
Она представляет собой систему автоматического контроля (рис 9.4),
которая может включать одну или несколько подсистем обнаружения
дефектов узлов и деталей подвижного состава (букс, колес, тормозов,
габарита и др.). В аппаратуре КТСМ-02 применяются напольные камеры
КНМ новой конструкции с креплением на рельс (рис 9.5). Это повышает
Рис. 9.5. Расположение напольной
камеры в КТСМ-02
чувствительность и помехоустойчивость аппаратуры за счет сокращения
расстояния от приемника теплового излучения до корпуса буксы.
При данном креплении напольной камеры расстояние между корпусом
буксы и болометром сокращается. Это приводит к повышению
чувствительности и помехозащищенности метода вследствие улучшения
соотношения сигнал/шум.
Кроме этого, при таком методе крепления камеры ориентация
приемных капсул сохраняется в течение длительного времени и не
требует дополнительной юстировки, так как объект контроля и приемник
теплового
излучения
работают
в
одной
системе
координат.
Эксплуатационные расходы на трудоемкую и требующую значительных
затрат времени ориентацию оптических систем снижаются.
Одной из причин появления "ложных" показаний при обнаружении
перегретых букс является зависимость температуры смотровой крышки от
энергии солнечного излучения. В случае ориентации на нижнюю часть
корпуса указанные ошибки контроля исключаются.
Кроме того, простота крепления напольной камеры позволяет
достаточно быстро ее демонтировать, а ремонтные и регулировочные
работы квалифицированно выполнять в условиях КИП.
Актуальность использования рассматриваемых напольных камер резко
возрастет при переводе подвижного состава на кассетные буксовые узлы,
когда в эксплуатации будут одновременно буксы различных типов. Напольные камеры комплекса КТСМ-02 не потребуют переориентации, а
проблемы распознавания букс и корректировки критерия отбраковки
решаются на программном уровне.
124
В состав постового оборудования входят: блок преобразования и
контроля ВПК, блок силовой коммутационный БСК, технологический пульт
ПТ, а также датчик температуры наружного воздуха ДТНВ (рис. 9.4).
Блок БПК выполняет все "интеллектуальные" функции: преобразует и
обрабатывает сигналы от путевых датчиков, формирует и передает
подсистемам контроля управляющие сигналы, получает от этих подсистем
данные об аварийных подвижных единицах и передает эту информацию в
линию связи. Дополнительно БПК вырабатывает сигналы управления и
диагностики состояния оборудования, работающего в составе комплекса.
В блоке имеются средства тестирования и настройки комплекса
персоналом в процессе ТО.
Оборудование БПК и другие подсистемы, работающие в составе
комплекса, питаются от блока БСК. Он автоматически переключается на
резервный фидер питания при отключении основного.
Достоинством данной системы является возможность ее расширения,
так как подсистемы контроля состояния отдельных узлов и деталей
подвижного состава объединены информационно и имеют общий сетевой
интерфейс, стандартные стыки и единый протокол сообщений.
Массовое распространение комплексов технических средств для
модернизации морально и физически устаревшей аппаратуры ПОНАБ-3
на сети дорог началось в 1999 г. Таким образом, комплекс КТСМ-01Д,
КТСМ-02 являются современными техническими средствами для
обнаружения перегретых букс.
9.4. Требования к размещению оборудования средств контроля
аварийных букс
Оборудование средств контроля устанавливается на подходе к
станции, где предстоит остановка поездов в случае обнаружения в них
неисправных подвижных единиц с учетом остановки поезда с
неисправными подвижными единицами на том же пути, на который ему был
приготовлен маршрут приема.
Перегонное оборудование должно располагаться на той части
перегона, где по тяговым расчетам систематически не применяется
служебное торможение, не производится проверка действия тормозов и
частые остановки поездов, реализуются наибольшие из допустимых
скорости движения; на прямых участках пути и не менее чем на 500 м по
ходу движения поездов от кривых радиусом менее 1000 м. Напольное
оборудование
должно размещаться в местах, не подверженных
снежным заносам, скоплению талых и ливневых вод, на устойчивом
полотне, балластный слой которого не подвержен пучению и разжижению.
Напольные устройства должны устанавливаться посередине рельсового
125
звена (на участках бесстыкового пути на расстоянии не менее 10 м от
стыка).
При выборе мест размещения перегонного оборудования необходимо
учитывать возможность доставки к этим местам обслуживающего персонала
(наличие вблизи автомобильных дорог, остановочных пунктов
электропоездов и др.). Предпочтительно размещение этого оборудования
осуществлять вблизи охраняемых переездов и других обслуживаемых
сооружений.
9.5. Заключение
Использование систем идентификации подвижного состава является
важной народнохозяйственной задачей для различных отраслей
железнодорожного транспорта, актуальность которой в современных
условиях резко возрастает. Наличие дистанционной функции и
автодиагностики основных узлов комплекса КТСМ и напольных камер
существенно сокращает эксплуатационные расходы. Определить работоспособность аппаратуры любого линейного пункта можно дистанционно как
с центрального поста, так и с линейного пункта. Выполнение на перегоне
регламентных работ и устранение неисправностей по факту
электромехаником сведены до минимума.
ЛЕКЦИЯ 10. СИСТЕМЫ
СИГНАЛИЗАЦИИ
АВТОМАТИЧЕСКОЙ
ЛОКОМОТИВНОЙ
10.1. Назначение и принцип действия АЛС
Согласно ПТЭ на
станциях, расположенных на участках,
оборудованных АБ или АЛС, главные пути, пути приёма и отправления
пассажирских поездов, а также приёмо-отправочные пути для
безостановочного пропуска поездов должны быть оборудованы путевыми
устройствами АЛС.
Тяговый подвижной состав (ТПС) является одним из ключевых
элементов системы безопасности. Соблюдение скоростного режима
ведения поезда и следование показаниям напольных светофоров в
значительной степени определяют безопасность движения. Для этого на
ТПС создается единая комплексная система управления и обеспечения
безопасности движения на тяговом подвижном составе – ЕКС (рис. 10.1).
ЕКС создается на базе [37] трех объединенных на программноинтерфейсном
уровне
систем:
автоведения
поезда
(УСАВП),
126
автоматического управления тормозами
управления безопасностью (КЛУБ-У).
Модуль стыковки Клуб-У
ТС КБМ
III ВКС и АСУ МС
II
САУТ-ЦМ
I
УСАВП
ЕКС
РПАД УККНП ЛИРУ КСД-Б
Передача кодов АПС
по рельсовым цепям
МАЛС
(САУТ-ЦМ),
комплексного
ГАЛС
Тяга
Электронное торможение
Системы управления Служебное торможение
Экстренное торможение
!
Датчик
САИ «Пальма»
Взаимодействие САУТ-ЦМ
с путевыми шлейфами
Рис.10.1 Структурная схема обеспечения безопасности на локомотиве
Кроме указанных на рис.10.1 приведены следующие обозначения: ТС
КБМ – телемеханическая система контроля бодрствования машиниста;
РПАД – регистратор параметров движения автоматический; УККНП –
устройство корректировки координаты нахождения поезда; ЛИРУ –
локомотивный индикатор и регистратор ускорений; КСД-Б – бортовая
система диагностики; МАЛС – маневровая АЛС; ГАЛС – горочная АЛС.
Для обеспечения безопасности поезда в ЕКС должна быть передана
информация о показании ближайшего напольного светофора, ограничении
скорости, разрешении на отправление, в том числе при запрещающем
показании светофора. Кроме того, в ЕКС следует передавать временные
ограничения скоростей, другие предупреждения, требование немедленной
остановки или остановки на станции, запрет управления и др. В
перспективе в ЕКС следует передавать и график движения поезда,
расстояние до ближайшего впереди идущего поезда, массу поезда и его
длину и другую необходимую для ЕКС и машиниста информацию.
Локомотивные светофоры (ЛС) устанавливаются в кабине управления
локомотива,
мотор-вагонного поезда, специального самоходного
подвижного состава и дают сигнальные показания непосредственно
машинисту и его помощнику или водителю дрезины и его помощнику.
Согласно ПТЭ ЛС
должны давать показания, соответствующие
показаниям путевых светофоров, к которым приближается поезд. При
движении только по показаниям локомотивных светофоров, эти
светофоры должны давать показания в зависимости от занятости или
свободности впереди лежащих блок–участков (БУ).
Сигналы ЛС имеют следующие сигнальные значения:
127
− зеленый огонь - «Разрешается движение; на путевом светофоре, к
которому приближается поезд, горит зеленый огонь»;
− желтый огонь - «Разрешается движение; на путевом светофоре, к
которому приближается поезд, горит один желтый огонь»;
− желтый огонь с красным - «Разрешается движение с готовностью
остановиться; на путевом светофоре, к которому приближается поезд,
горит красный огонь»;
− красный огонь загорается в случае проезда путевого светофора с
красным огнем. При четырехзначной автоблокировке перед пред входным
или другим станционным светофором с желтым мигающим огнем локомотивным светофором подается желтый огонь, чтобы поезд мог снизить
заблаговременно скорость на двух блок-участках к светофору с двумя
желтыми огнями, или зеленый огонь (по соображениям ускорения
пропуска пригородных поездов), если отклонение на боковой путь
происходит далеко за светофором с двумя огнями.
− белый огонь локомотивного светофора указывает, что хотя
локомотивные устройства включены, но нет сигналов от путевых светофоров.
АЛС дополнятся устройствами безопасности, обеспечивающими
контроль: установленных скоростей движения, самопроизвольного ухода
поезда и периодической проверки бдительности машиниста [37]. В случаях
потери машинистом способности управления локомотивом, указанные
устройства должны обеспечивать автоматическую остановку поезда перед
путевым светофором с запрещающим показанием.
Структурная схема АЛС приведена на рис.10.2. Система АЛС состоит
из путевых устройств, служащих для формирования и передачи числовых
кодов, и локомотивных устройств, принимающих и дешифрирующих
кодовые сигналы и включающих огни ЛС.
128
U=U 1+U2
а
U2
U1
ЛК1
ЭПК
У
2Р
Ф
Iс
Iс
ДШ
ЛК2
1Р
б
РБ
ЛС
ЛК1
Код
Ic
Код
IАЛС
Ic
ЛК2
5
ИТ
Т
пх
П
КТ
II
I
З
м
Д
Я
3
ох
КПТШ
Ж
П
п
КЖ
Т
пх
ох
Рис. 10.2. Структурная схема кодовой АБ и АЛСН
Контроль скорости может быть двух видов: плавный и ступенчатый.
При плавном контроле непрерывно в каждый данный момент проверяется
соответствие фактической скорости – заданной. Превышение скорости
вызывает принудительную остановку поезда во избежание проезда
закрытого светофора или светофора, требующего проследования с
ограниченной скоростью [7, 30].
При ступенчатом контроле скорости допускаемая скорость сохраняет
на протяжении всего БУ одно значение, соответствующее сигналу
светофора (рис.10.3). Приведение машинистом фактической скорости
поезда в соответствие с допустимой скоростью на БУ может
предусматриваться предварительно на предыдущем БУ или на самом БУ
после проследования путевого светофора и появления сигнала,
требующего снижения скорости. В последнем случае, если фактическая
скорость превышает допустимую, то, чтобы не наступило из-за этого
экстренное торможение, машинист должен привести в действие тормоза с
требуемой интенсивностью торможения и с правом отпуска тормозов,
когда фактическая скорость будет доведена до допустимой.
129
Рис. 10.3. Ступенчатый контроль скорости:
а – с предварительным снижением скорости; б – с контролем торможения; А –
свободная зона с приведением скорости к допускаемой на следующем БУ; Б- зона
превышения скорости
В случае отказа устройств на локомотиве машинист может вести поезд
лишь со скоростью до 20 км/ч, наблюдая за свободностью пути в пределах
прямой видимости, до ближайшей станции и далее отправляться только
на свободные от поездов межстанционные перегоны.
Электрические сигналы локомотивной сигнализации, относящиеся к
известным системам, строятся с применением различных методов
селекции.
Для более ранних систем локомотивной сигнализации характерно
применение электрических сигналов с одной несущей частотой, обычно
промышленной, что объясняется ограниченными в период их создания
возможностями элементной базы для местного генерирования различных
частот. К таким кодам относится числовой код (рис.10.4, а), применяемый
в кодовой АБ и АЛС. Сигналы этого кода различаются между собой числом
импульсов в кодовой комбинации, которая всей совокупностью импульсов
и интервалов определяет соответствующее ей сообщение. Такое же
использование одной несущей частоты характерно для импульсночастотного кода (рис. 10.4, б).
Рис. 10.4. Виды кодов АЛС:
а – числовой; б – импульсно-частотный; в- частотный; г – комбинационнокачественный
130
Импульсно-частотный код характерен тем, что его электрические
сигналы различаются частотой следования импульсов переменного тока
несущей частоты. Частота следования импульсов составляет 75, 120, 180
и 270 имп/мин, и сигналы декодируются как имеющие частоту 1,5; 2,0; 3,0 и
4,5 Гц. Современные кодирующие и декодирующие элементы системы
выполняются на бесконтактных элементах.
В обеих системах электрические сигналы являются общими для РЦ и
АЛС. Системы АЛС могут отличаться способом разделения электрических
сигналов (кодовое, частотное), видом модуляции (амплитудная, частотная,
фазовая) или манипуляции и другими признаками.
10.2. Путевые устройства АЛС
Путевые устройства АЛС [17, 19, 35] состоят из кодирующих устройств
и рельсовой линии, по которой передаются электрические сигналы на
локомотив. При этом имеется в виду, что РЦ - это датчик, с помощью
которого непрерывно проверяется свободность от подвижного состава
любой части контролируемого участка пути. При совмещении передача
сообщений с пути на локомотив осуществляется одним из следующих
способов:
- теми же токами, которыми питаются непрерывные РЦ переменного
тока;
- теми же токами, которые служат для передачи сообщений между
сигнальными установками (кодовые РЦ);
- токами с частотой, отличной от частоты самой РЦ.
Подлежащие передаче сообщения о сигналах путевого светофора или
о свободных впереди БУ формируются совместно с устройствами АБ и
АЛС. Такое преобразование выполняют кодирующие устройства, в
функции которых входят: выбор сообщения, соответствующего
передаваемой информации; преобразование (кодирование) выбранного
сообщения в кодовую комбинацию; преобразование кодовой комбинации в
электрический сигнал, предназначенный для непосредственной передачи
сведений по рельсовой линии на локомотив; автоматический запуск и
передача электрических сигналов в рельсы во время прохода поезда.
Эксплуатационные требования, предъявляемые к передаче сигналов
на локомотив, состоят в следующем: сигналы, подаваемые ЛС, должны
находиться в установленном соответствии с сигналами путевых
светофоров. Посылка электрических сигналов во входные, выходные
стрелочные и путевые участки допускается лишь при условии, что поезд
принимается или отправляется при открытом входном, маршрутном или
выходном светофоре; движение по пригласительному сигналу
соответствует проследованию закрытого светофора; посылка сигналов в
131
приёмо-отправочные пути, оборудованные путевыми устройствами,
производится независимо от установки маршрута.
Включение
заградительного
светофора
перед
переездом
сопровождается прекращением передачи сигналов на локомотив. Перегорание лампы на путевом светофоре, если предусмотрена смена
сигнала на нем на более запрещающий, должна сопровождаться
приведением электрического сигнала в рельсах в соответствие со
сменой сигнала.
Совмещение путевых устройств АЛС с РЦ предусматривает:
− защиту путевых реле от опасного и мешающего воздействия
электрических сигналов локомотивной сигнализации;
− согласование уровней токов АЛС с режимом работы РЦ;
− возможность посылки сигналов АЛС с питающего или релейного
или обоих концов РЦ, трансляции сигналов из одной РЦ в другую;
− автоматическое восстановление действия кодированной РЦ по
основному назначению после освобождения ее поездом, в том числе
путей с двусторонним действием сигнализации, при случайном
шунтировании или кратковременных перерывах питания во время
перехода с основного на резервное и обратно;
− необходимую и допустимую защиту от электрического износа
контактов, которые коммутируют токи электрических сигналов АЛС;
− средства против временных и числовых искажений параметров
комбинации сигналов при передаче.
10.3. Локомотивные устройства АЛС
К локомотивным устройствам относят локомотивные фильтр и
усилитель. Фильтр настроен на частоту сигнального тока и не пропускает в
усилитель токи других частот, а так же подавляет помехи от тягового тока.
Усовершенствованный усилитель типа УК25/50 на полупроводниковых
элементах, усиливает сигналы на частотах 25, 50 и 75 Гц. Основной
элемент локомотивных устройств АЛСН – это дешифратор типа ДКСВ. С
помощью дешифратора осуществляется: расшифровка числовых кодовых
сигналов, принятых из РЦ; включение огней ЛС; смена огней ЛС при
поступлении кода другого огня с выдержкой времени 5 – 7 с; включение
белого огня с выдержкой времени 15 с (при перерыве приёма кодовых
сигналов продолжительностью не более 1,5 с показания на локомотивном
светофоре не меняются); включение белого огня на локомотивном
светофоре при прекращении приёма кода зелёного или жёлтого огня;
включение на локомотивном светофоре красного огня при прекращении
приема кода желтого огня с красным; включение на локомотивном
светофоре белого огня вместо зеленого или желтого огня, или красного
вместо желтого огня с красным при поступлении импульсов кодового
132
сигнала без длинных интервалов, или непрерывного тока; контроль
бдительности машиниста при однократном и многократном нажатии
рукоятки бдительности для предотвращения действия автостопа; контроль
скорости проезда путевого светофора с желтым или красным огнем с
последующим включением автоторможения при превышении допустимой
скорости проезда светофора.
В кабине машиниста установлены две рукоятки бдительности:
основная и дополнительная. Расположение дополнительной рукоятки
выбрано так, чтобы для её нажатия машинист вставал со своего рабочего
места, это исключает возможность рефлекторного нажатия существующей
основной рукоятки бдительности. В качестве дополнительной рукоятки
бдительности используют кнопку ВК. Кнопка ВК используется для контроля
бдительности при движении на запрещающие сигналы. Для выполнения
автоторможения поезда используется электропневматический клапан ЭПК
(рис. 10.2).
Так же к локомотивным устройствам относится скоростемер.
Локомотивный скоростемер является измерительно-регистрирующим
устройством, предназначенным для выполнения следующих функций:
показание скорости движения, пройденного пути и суточного времени;
регистрация скорости движения, пройденного пути, суточного времени
движения и стоянок, направления движения, сигнальных огней ЛС ,
положения устройств АЛС непрерывного действия, давления воздуха в
тормозной системе (режима торможения) и состояния системы
автоматического управления тормозами; сигнализация о контролируемых
скоростях.
Проверка бдительности машиниста с точки зрения выполнения
требований разграничения необходима при приближении поезда к
закрытому светофору и наиболее эффективна, как показала практика,
когда производится периодически, вступая в действие возможно реже
лишь в случаях прямой в этом необходимости. Проверка бдительности
производится однократно или периодически. Если рукоятка бдительности
не будет нажата в течение 7 с начала предупреждения свистком, то это
устройствами расценивается как потеря машинистом способности вести
поезд, и устройства, воздействуя на тормозную систему поезда,
автоматически останавливают поезд.
Периодическая проверка бдительности машиниста при локомотивной
сигнализации производится через каждые 30 - 40 с в течение времени ее
действия. При желтом огне с красным и красном огне периодическая
проверка бдительности действует независимо от скорости движущегося
поезда. Желтый огонь ЛС вводит в действие периодическую проверку
бдительности не всегда, а только тогда, когда скорость у поезда выше
скорости Vж, обычно равной скорости, установленной на данном участке
для проезда всех проходных светофоров АБ с одним желтым огнем.
133
10.4. Система автоматического управления торможением поездов
Система автоматического управления торможением поездов с
централизованным размещением аппаратуры (САУТ-Ц) предназначена
для повышения безопасности движения и исключения проезда
светофоров с запрещающими показаниями.
Система САУТ-Ц обеспечивает: контроль допустимой скорости с
индикацией машинисту резерва скорости при движении по зеленому огню
АЛСН, а в случае превышения этой скорости производить отключение тяги
и служебное торможение до заданной скорости; контроль и регулирование
скорости поезда служебным торможением при следовании на желтый
сигнал путевого светофора в зависимости от длины и уклона БУ с учетом
фактической эффективности тормоза поезда; проследовать путевой
светофор с желтым показанием со скоростью определяемой в
зависимости от длины и уклона следующего блок - участка на перегоне, а
на станциях в зависимости от допускаемых скоростей движения по
станционным путям; после проследования входного светофора станции и
движении на закрытый выходной светофор система обеспечивает
контроль и снижение скорости по входным станционным переводам,
контроль и регулирование скорости по станционным путям и
автоматическую остановку поезда служебным торможением перед
запрещающим светофором на расстоянии 50 м с точностью 40 м.
Реализация перечисленных функций возможна при наличии
информации на локомотиве о показаниях впереди лежащего, по ходу
движения поезда, светофора, длине первого блок - участка, информации о
втором блок - участке. Информация о показаниях светофора поступает от
локомотивных устройств АЛСН, а о характеристиках блок - участков от
путевых устройств САУТ. Система САУТ содержит комплекс путевых и
локомотивных устройств.
Локомотивная аппаратура САУТ-Ц содержит две бортовые ЭВМ, пульт
управления, табло с индикацией, датчики для измерения пройденного
пути, скорости и направления движения, блок памяти путевых параметров
всех участков перегонов, синтезатор речи, антенну для приема сигналов
от путевых устройств.
При входе локомотива с приемной антенной САУТ в зону действия
шлейфа на ее выходе появляется напряжение с частотой питающего
генератора. Принятый сигнал будет присутствовать на выходе антенны в
течение всего времени нахождения ее над шлейфом, что позволяет
локомотивным устройствам САУТ рассчитать его длину а следовательно и
длину БУ. С помощью длины шлейфа можно закодировать и другую
необходимую для работы САУТ информацию. Конструктивно шлейф
134
А
1 Li
2
Светофор
КМ
(ТЯ)
Релейный
шкаф
Кабельная
трасса
3
4
Не менее
1300 мм
Изолирующий стык
Не менее 1500мм
может иметь различные длины и перестраиваться с помощью устройств
ЖАТ [19].
На рис.10.5 приведена схема расположения путевых устройств у
предвходного светофора САУТ-Ц. Первый шлейф Lшл1 подключен к
путевому генератору, работающему на частоте 19,6 кГц, и
расположенному в релейном шкафу. Подключение генераторов к
шлейфам выполнено с помощью кабельной линии, кабельных муфт (КМ)
или трансформаторных ящиков (ТЯ) и путевых перемычек 1 – 4 из
стального троса диаметром 5,5 мм. Крепление троса осуществляется с
помощью штепселя, забиваемого в отверстие шейки рельса. Первый
шлейф передает информацию на локомотив о длине первого БУ.
Lшл.2
(внутренняя)
Lшл.1
(внешняя)
Рис. 10.5. Схема расположения путевых устройств САУТ-Ц
Второй шлейф Lшл2
подключается к путевому генератору,
работающему на частоте 27 кГц, и передает информацию о длине
тормозного пути служебного торможения от входного светофора до места
остановки локомотива. Длина отрезка LI информацию о спрямленном
профиле первого блок участка.
На выходе станции к шлейфу подключается программируемый
генератор, который передает на локомотив информацию о номере
перегона (присвоенном ему коде) и расстоянии от места установки
генератора до первого перегонного светофора. По коду перегона
локомотивные устройства САУТ выбирают из блока памяти информацию о
135
всех его блок -участках. Границы блок - участков по ходу движения поезда
на перегоне определяют устройства АЛСН.
Применение программируемых путевых генераторов на выходе со
станций исключает необходимость установки генераторов у проходных
светофоров на перегоне, что существенно сокращает расход кабеля и
эксплуатационные расходы.
Наличие синтезатора речи на локомотивных устройствах САУТ-Ц
позволяет информировать машиниста, в удобной для восприятия форме голосом, о приближении к станциям, мостам и другим искусственным
сооружениям. С помощью синтезатора речи осуществляется также
контроль бдительности машиниста при смене показания АЛСН с зеленого
на желтый, с желтого на красно-желтый.
10.5. Комплексное локомотивное устройство безопасности
Комплексное локомотивное устройство безопасности (КЛУБ) серийно
внедряется на Российских железных дорогах с 1994 г. Оно выполнено на
микропроцессорной базе (рис. 10.6) и имеет резервирование всех
функциональных модулей. В состав устройства (рис. 10.7) входят
следующие блоки:
− блок электроники (БЭЛ), предназначенный для приема сигналов от
приемных катушек (ПК) и датчиков пути и скорости (ДПС) и для обработки
и выдачи информации;
КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ
ЛОКОМОТИВНОЕ УСТРОЙСТВО
УСТРОЙСТВО
КОМПЛЕКСНОЕ
БЕЗОПАСНОСТИ
(КЛУБ-У)
БЕЗОПАСНОСТИ (КЛУБ-У)
Рис.10.6. Внешний вид аппаратуры КЛУБ
136
Кабина 1
Кабина 2
БИЛ
БИЛ
РБ
БК
ДПС
БИЛ
БЭЛ
ПК
БВД
ПК
Рис.10.7. Структурная схема аппаратуры КЛУБ
− локомотивный блок индикации (БИЛ), отображающий сигналы АЛС,
параметры движения поезда по информации от блока БЭЛ, звуковую и
световую индикацию и др.;
− блок коммутации (БК), служащий для обработки сигналов от
датчиков и подключения к БЭЛ периферийных устройств;
− блок ввода и диагностики БВД, для тестирования аппаратуры перед
поездкой с целью выявления скрытых повреждений.
КЛУБ обеспечивает:
− прием информации из канала АЛСН;
− измерение и индикацию фактической скорости движения;
− формирование допустимой скорости движения и ее индикацию;
− контроль скорости движения и торможение при превышении
допустимой скорости;
− контроль торможения перед светофором с запрещающим сигналом;
− контроль бдительности машиниста;
− исключение самопроизвольного (несанкционированного) движения;
− регистрация параметров движения в электронной памяти;
− исключение несанкционированного выключение ЭПК;
− учет категории поезда, типа тяги и длинны БУ;
− информирование машиниста о показаниях светофоров, числе
свободных БУ, фактической скорости с точностью до 1км/ч и допустимой
скорости на данном участке, о текущем времени, координатах
137
местоположения локомотива при помощи спутниковой навигации,
соблюдении графика движения поездов и пр.
КЛУБ имеет модульную структуру, в которой равноправные
независимые модули взаимодействуют друг с другом посредством
системной шины. Языком программирования для КЛУБ выбран язык С.
Программное обеспечение системы представляет собой совокупность
независимых последовательному интерфейсу типа CAN.
10.6. Заключение
Благодаря непрерывной передаче сигналов на локомотив, что является
эксплуатационным признаком, локомотивная сигнализация облегчает
условия труда машиниста и повышает безопасность движения поездов.
Сигналы, будучи воспроизведенными, на локомотиве, легко и
безошибочно воспринимаются и осознаются машинистом, что дает ему
возможность уверенно вести поезд в любых условиях, даже при плохой
видимости сигналов, подаваемых путевыми светофорами, что,
несомненно, повышает безопасность движения.
Поскольку существующие системы получили полное, совместное с АБ
распространение на всей сети железных дорог, в дальнейшем на участках
с многозначной локомотивной сигнализацией будет иметь место действие
одновременно и существующей системы (АЛСН, АЛС-ЕН), а также
микропроцессорные системы (КЛУБ, САУТ, ТС КБМ). Локомотивы с многозначной сигнализацией в свою очередь, будучи оборудованными обеими
системами, способны обращаться и на участках с локомотивной
сигнализацией числового кода. Кроме того, на участках с многозначной
локомотивной сигнализацией при прекращении приема частотных
сигналов происходит автоматический переход на прием сигнала числового
кода, что особенно важно для участков, где локомотивная сигнализация
будет выполнять роль основного средства сигнализации и связи при
движении поездов.
ЛЕКЦИЯ 11. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА С
ПОМОЩЬЮ ТЕХНОЛОГИЙ СПУТНИКОВОЙ НАВИГАЦИИ
11.1 Назначение и принцип действия спутниковых навигационных
систем
Для отслеживания перемещения подвижных объектов возможно
применение спутниковых систем. Развитие отечественной глобальной
радионавигационной
спутниковой
системы
(ГЛОНАСС)
имеет
сорокалетнюю историю, начало которой положено, как чаще всего
считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории
138
человечества искусственного спутника Земли (ИСЗ). Измерения
доплеровского сдвига частоты передатчика этого ИСЗ на пункте
наблюдения с известными координатами позволили определить
параметры движения этого спутника.
Обратная задача была очевидной: по измерениям того же
доплеровского сдвига при известных координатах ИСЗ найти координаты
пункта наблюдения. Эффект Доплера (по имени австрийского физика
К. Доплера) состоит в изменении регистрируемой приемником частоты
колебаний или длины волны при относительном движении приемника и
источника этих колебаний.
Проведенные работы позволили перейти в 1963 г. к опытноконструкторским работам над первой отечественной низкоорбитальной
системой, получившее в дальнейшем название «Цикада». В 1979 г. была
сдана в эксплуатацию навигационная система 1-го поколения «Цикада» в
составе 4-х навигационных спутников (НС), выведенных на круговые
орбиты высотой 1000 км, наклонением 83° и равномерным
распределением плоскостей орбит вдоль экватора. Она позволяет
потребителю в среднем через каждые полтора-два часа входить в
радиоконтакт с одним из НС и определять плановые координаты своего
места при продолжительности навигационного сеанса до 5…6 мин.
В ходе испытаний было установлено, что основной вклад в
погрешность
навигационных
определений
вносят
погрешности
передаваемых спутниками собственных эфемерид, которые определяются
и закладываются на спутники средствами наземного комплекса
управления. Поэтому наряду с совершенствованием бортовых систем
спутника и бортовой приемоиндикаторной аппаратуры, разработчиками
системы серьезное внимание было уделено вопросам повышения
точности определения и прогнозирования параметров орбит НС.
Успешная эксплуатация низкоорбитальных спутниковых навигационных
систем морскими потребителями привлекла широкое внимание к
спутниковой навигации. Возникла необходимость создания универсальной
навигационной системы, удовлетворяющей требованиям всех.
Global Positioning System (GPS) создана министерством обороны США
и позволяет с точностью до 20 м определять в любой точке земного шара
место нахождения неподвижного либо движущегося объекта на земле, в
воздухе и на море в трех измерениях с очень высокой точностью. Более
того, GPS сообщает скорость передвижения объекта. Эта система
позволяет оснастить речные и морские суда, автомобили, подвижной
состав железнодорожного транспорта, самолеты электронными картами,
на которых показывается место нахождения. GPS используется также для
составления географических карт и в задачах геодезии. Система широко
используется и гражданскими абонентами. Аналогом GPS является
отечественная система ГЛОНАСС.
139
Система создана в спутниковой сети, образованной спутниками связи,
вращающимися вокруг земли по высоким орбитам. В 1995 г. сеть имела 24
спутника. Для нахождения в GPS каждый абонент должен иметь
небольшое устройство. Последнее в бытовом варианте имеет размер,
равный мобильному телефону (в последнее время появились мобильные
телефоны совмещающие в себе функции телефона и GPS-приемника),
что позволяет носить его в кармане костюма, устанавливать на подвижных
объектах транспорта (например, в системах контроля положения грузов).
Кроме высокой точности измерения координат своего местоположения и
скорости различных подвижных объектов, а также определения времени,
важным ее достоинством являются непрерывность выдачи информации,
всепогодность и скрытность.
Спутниковые системы местоопределения подвижных объектов
базируются на использовании радиолиний, обеспечивающих передачу
сигналов между подвижным объектом, ИСЗ и наземной станцией.
Наземный комплекс управления решает следующие задачи:
– программное и командное управление ИСЗ;
– мониторинг ИСЗ;
– эфемеридное и частотно-временное обеспечение (определение
параметров движения и частотно-временных поправок ИСЗ).
Эфемериды (в астрономии) – координаты небесных светил, параметры
орбит спутников и другие переменные астрономические величины,
вычисляемые для ряда последовательных моментов времени и
сведенные в таблицы.
Навигационные сигналы содержат эфемеридную информацию о
параметрах движения ИСЗ. Аппаратура потребителя принимает эти
сигналы и определяет дальность от объекта до ИСЗ [3].
Координаты местоположения вычисляются на основе измеренных
дальностей до четырех спутников. Трех измерений было бы достаточно,
если иметь на объекте сверхточные часы. На спутнике установлены
атомные часы с точностью 10-9 сек. Часы приемника из соображения
затрат не могут быть совершенные, поэтому необходимо устранить
отставание или опережение времени за счет четвертого измерения.
Расстояние до спутников определяется путем измерения промежутка
времени, который потребуется радиосигналу чтобы дойти до объекта.
На точность навигации подвижных объектов оказывают влияние
различного рода погрешности: ионосферные и атмосферные задержки
сигналов; мгогопутность распространения сигнала, инструментальная
ошибка приемника; тропосфера; геометрическое расположение спутников
и прочее. Некоторые из этих ошибок могут быть устранены математически
или путем моделирования. Другие источники ошибок оценить трудно.
140
Глобальные навигационные системы GPS и ГЛОНАСС были не только
развернуты, но и опробованы в гражданском и боевом применении,
функционирует целый ряд систем спутниковой связи.
11.2. Возможность применения систем спутниковой навигации в
системах интервального регулирования поездов
Схема построения системы местоположения и сопровождения
подвижных объектов на основе спутниковой радионавигации системы
составлена на рис. 11.1.
ГОС1
ГОС2
Наземная станция
центра сбора информации
Рис. 11.1. Эскизная схема работы систем спутниковой навигации
В системе не существует как таковых напольных устройств. Все их
функции объединяют в себе блок пользовательских портативных
навигационных систем и основная система спутниковой навигации.
Портативные
спутниковые
навигаторы
устанавливаются
непосредственно на подвижном составе (на локомотиве и на грузах,
которые включены в систему контроля положения груза).
Необходимая информация о координатах железнодорожных объектов
(напольных сигналов выходных и входных светофорах) хранится в едином
диспетчерском центре управления и по каналам связи (физическим цепям,
либо по спутниковым системам связи) передается на систему контроля
положения подвижной единицы на станции, прилегающие к перегону.
Таким образом, решается задача не только обеспечения безопасности
движения, но и организации единого информационного пространства,
соединяющего единый диспетчерский ЦУП и участковые станции.
Получив от ДСП станции А информацию о начале движения поезда,
системы слежения за объектом на соседней станции Б начинают получать
информацию о местонахождении подвижной единицы. При расхождении
141
координат подвижной единицы с координатами выходного светофора на
5 м выходной светофор станции А перекрывается на запрещающее
показание. В дальнейшем при приближении подвижной единицы к
станции Б входной светофор станции Б открывается. При проследовании
на нем загорается запрещающее показание. И ДСП станции Б получает
информацию о прибытии головы поезда.
Существующие на сегодняшний день системы ДК и ДЦ пока еще не
обладают возможностью работы с системами спутниковой навигации для
определения положения подвижных единиц, однако в сроком будущем
превосходства спутниковых систем интервального регулирования
движения поездов станут очевидны, а техническая реализация будет
обладать максимальной надежностью и безопасностью.
Вся информация автоматически заносится в протокол работы ДСП,
составляется исполненный график движения поездов, и результаты
отправляются в ЕДЦУ.
К преимуществам данной системы можно отнести широкий спектр
решаемых задач как по обеспечению безопасности движения, так и
предоставления дополнительных сервисных функций, таких как
определение местоположения грузовых вагонов, автоматическая
корректировка графика движения поездов с выдачей информации о
планируемых задержках на табло пассажирских и грузовых терминалов и
многое другое.
К недостаткам можно отнести сложность обслуживания, недоступность
обслуживания
орбитальной
группировки
систем,
некоторая
подверженность космическим явлениям (интерференция солнечных лучей
и т. д.). Главным функциональным недостатком подобных систем является
то, что несмотря на свое техническое совершенство данная система не
позволяет обеспечивать контроль состояния рельсовых нитей.
Контроль прибытия поезда в полном составе может быть осуществлен
следующими способами:
Применение счетчиков осей
Применение излучателей на локомотивах и отражателей на
хвостовых вагонах
Системы визуального контроля на малодеятельных участках
Системы спутникового контроля (на тех же приемниках
навигационной информации, что и локомотивные устройства)
Данные
системы
позволяют
помимо
ускорения
работы
железнодорожного транспорта, повышения пропускной способности,
повышения качества обслуживания, еще и повысить экономический
эффект, т. к. внедрение данных систем практически полностью исключает
затраты железной дороги на содержание рельсовых цепей, их сезонную
настройку.
142
ЗАКЛЮЧЕНИЕ
Одной из важнейших проблем информатизации железнодорожного
транспорта России является автоматизация сбора первичной оперативной
информации и сокращение до минимума времени на ее доставку
потребителям. Это необходимое условие обеспечения высокой
эффективности работы такой сложной отрасли народного хозяйства, как
железнодорожный
транспорт.
Нижний
уровень
инфраструктуры
информатизации предназначен для централизованного сбора первичной
оперативной информации о функционировании и техническом состоянии
объектов транспорта. К нему относятся устройства ЖАТ, средства
идентификации и контроля технического состояния подвижного состава и
др., обеспечивающих функционирования АСУ верхних уровней.
Структура технических средств ССИ так же разнообразна, как и
решаемые
задачи
в
комплексах
информационных
технологий
железнодорожного транспорта. Знание технических и метрологических
характеристик позволит правильно выбрать и эксплуатировать
аппаратные средства АСУ.
В настоящее время продолжает развиваться направления по сбору как
аналоговых, так и дискретных сигналов на основе программируемых
микропроцессорных контроллеров. Подобные устройства внедряются и
для автоматизации сбора информации на ж.-д. транспорте.
Изучением теоретической части учебной дисциплины не должны
ограничиваться только данным конспектом. Работа по овладению умений
и навыков будет продолжена, изучая дополнительную литературу и в
практической части курса. Желаю удачи.
143
144
РЕКОМЕНДУЕМЫЙ БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Автоматизация диспетчерского управления и регулирования, эксплуатационной работы на железнодорожных участках и узлах // Экспрессинформация. Серия - Вычислительная техника и автоматизированные
системы управления (ЦНИИ ТЭИ МПС). – М., 1997. - Вып. 4.
2. Антипов, В.И. Эксплуатация устройств контроля
состояния
перегона методом счета осей/ В.И.Антипов, С.А.Щиголев, В.А.Чеблаков //
Автоматика, связь, информатика.– 1999.– №11, - С. 26-28.
3. Болдин, В.А.Современные глобальные радионавигационные
системы/ В.А.Болдин.– М.:Транспорт, 1985.–47 с.
4. Брискина Т.С. Создание и внедрение единой корпоротивной
автоматизированной системы управления финансами и ресурсами
отрасли/Т.С. Брискрна, Н.И.Шутова //Автоматика, связь, информатика.–
2000.– №6.– С.2-7.
5. Бухгольц, В.П. Путевые датчики контроля подвижного состава на
рельсовом транспорте/ В.П.Бухгольц, Г.А.Красовский, А.Э.Штанке. – М.:
Транспорт, 1976. – 96 с.
6. Буянов, В.А. Автоматизированные информационные системы на
железнодорожном транспорте/ В.А.Буянов, Г.С.Ратин. – М.: Транспорт,
1984.– 215 с.
7. Васин, Н. Н. Системы сбора информации на железнодорожном
транспорте: Учебное пособие/ Н.Н.Васин, В.П.Мохонько.– Самара:
СамИИТ, 2001,– 120 с.
8. Галкин,
О.В.
Информационно-эксплуатационные
показатели
датчиков для счета осей/ О.В. Галкин, Г.Ф.Насонов //Автоматика, связь,
информатика.– 2002.– №2.– С. 33-35.
9. Гриненко, А.В.. Основные принципы построения диспетчерской
подсистемы в АПК-ДК/ А.В.Гриненко, А.И.Пресняков, В.И.Варченко
//Автоматика, связь, информатика.– 2000.– №9.– С.16-21.
10. Давыдов, Ю.А. Моделирование, оптимизация и контроль
информационных
потоков
локомотивного
депо:
Монография/
Ю.А.Давыдов.– Хабаровск: Изд-во ДВГУПС, 2001.– 116 с.
11. Дмитренко, И.Е. Измерение и диагностирование в системах
железнодорожной автоматики, телемеханики и связи/ И.Е. Дмитренко,
В.В.Сапожников, Д.В.Дьяков.– М.: Транспорт, 1994.–263 с.
12. Душин, Е. М. Основы метрологии и электрические измерения / Е.
М.Душин. – Ленинград: Энергоатомиздат, 1987. – 290 с.
13. Есюнин, В. И. О проблемах эксплуатации устройств АЛСН / В. И.
Есюнин //Автоматика, связь, информатика. – 2000. - № 5. – С. 32 – 34.
145
14. Ефремов, Д.И. Принципы построения дорожного центра
управления/ Д.И.Ефремов //Автоматика, связь, информатика.– 2000.–№4.–
С.11-13.
15. Зыков, В.Н. Применение аппаратуры счета осей Az350 фирмы
SIMENS в проектах автоблокировки/ В.Н.Зыков // Автоматика,
телемеханика и связь. –1995. –№11. – С. 33-34.
16. Информационная система для управления перевозочным
процессом / Ратин Г.С., Угрюмов Г.А., Писарев А.П., Рыбаков О.М. Под
ред. Ратина Г.С. – М.: Транспорт, 1989.– 240 с.
17. Казаков, А. А. Автоматизированные системы интервального
регулирования движения поездов / А. А. Казаков, В. Д. Бубнов, Е. А.
Казаков. – Москва: Транспорт, 1995. – 320 с.
18. Кириленко, А. Г. Комплексная автоматизированная система
управления
железнодорожным
транспортом.
Учебное
пособие/
А.Г.Кириленко.– Хабаровск. Издательство ХабИИЖТ, 1985.– 82 с.
19. Кириленко, А.Г. Рельсовые цепи: Курс лекций/ А.Г.Кириленко.–
Хабаровск: Изд-во ДВГУПС, 2000.-68 с.
20. Кириленко, А.Г. Счетчики осей в системах железнодорожной
автоматики и телемеханики: Учеб.пособие /А.Г.Кириленко, А.В.Груша. –
Хабаровск: Изд-во ДВГУПС, 2003.-75 с.
21. Косилов, Р.А. Основные направления использования систем
видеонаблюдения / Р.А.Косилов, Ю.И.Таныгин// Автоматика, связь и
информатика.– 20019.– №7 – С.31-32.
22. Клаассен, К. Б. Основы измерений. Электронные методы и
приборы в измерительной технике / К. Б. Клаассен. –Москва: Постмаркет,
2000. – 352 с.
23. Крамаренко,
Е.Р.
Системы
сбора
информации
на
железнодорожном транспорте: Методическое пособие на выполнение
практических занятий/ Е.Р.Крамаренко. –Хабаровск: Изд-во ДВГУПС,
2003.-66 с.
24. Куликовский, К.Л. Методы и средства измерений. Учебное пособие
для вузов/ К.Л.Куликовский, В.Я. Купер. – М.: Энергоатомиздат, 1986.– 234
с.
25. Левшина, Е.С. Электрические измерения физических величин.
Измерительные преобразователи. Учебное пособие для вузов /
Е.С.Левшина, П.В.Новицкий. – М.: Энергоатомиздат, 1983.– 345 с.
26. Леонов, А. А. Техническое обслуживание автоматической
локомотивной сигнализации / А. А. Леонов, Б. С. Рязанцев. – Москва:
Транспорт,1982. – 256 с.
27. Малинов, В.М. Применение устройств счета осей для контроля
свободности перегонов/ Малинов, В.М. // Автоматика, связь и
информатика.– 1999.– №12 – С.11-14.
28. Манаков, А.Д. Автоматизированное рабочее место поездного
146
диспетчера
в
системе
дистанционного
управления
«Диалог».
Методические указания/ А.Д. Манаков. – Хабаровск: Издательство
ДВГУПС, 1999.-15 с.
29. МИКАР. Система измерения АЛСН: руководство по эксплуатации
97Р.00.200.РЭ / Екатеринбург: НПП «Уралжелдоравтоматика», 2002.– 21 с.
30. Мирсанов, В.Д. Современные системы железнодорожной
автоматики и телемеханики, их влияние на технологию и организацию
управления процессом перевозок. Конспект лекций /В.Д. Мирсанов.–
Хабаровск: Изд-во ДВГУПС, 2001.– 50 с.
31. Мобильный измерительный комплекс автоматики и радиосвязи:
руководство по эксплуатации 97Р.00.000.РЭ / Екатеринбург: НПП
«Уралжелдоравтоматика», 2002. – 26 с.
32. Новицкий, П.В. Оценка погрешностей результатов измерений/
П.В.Новицкий, И.А.Зограф. – Л.: Энергоатомиздат, 1991.– 304 с.
33. Основы технической диагностики. /Под ред. П.П.Пархоменко.– М.:
Энергия, 1976.– 464 с.
34. Планирование
метрологического
обслуживания
средств
измерений и состава подразделений метрологической службы железных
дорог в условиях рыночной экономики: методические указания / Ю. Я.
Яныгин, Н. И. Ананьев, Т. И. Шмардов. – Москва: ВНИИЖТ МПС, 1993. –
25 с.
35. Сергеев, А. Г. Метрология: Учебное пособие для вузов/
А.Г.Сергеев, В.В.Крохин.– М.: Логос, 2000.– 408 с.
36. Системы железнодорожной автоматики и телемеханики./ Под ред.
Ю.А.Кравцова. Учебник для ВУЗов.– М.: Транспорт, 1996, 400 с.
37. Системы
железнодорожной
автоматики
и
телемеханики/
Автоматика, связь, информатика. – 2004. – №6– С.2-6
38. Талалаев, В.Н. Устройства счета осей / В.Н. Талалаев,
С.А.Щиголев, Б.С. Сергеев // Железнодорожный транспорт. –1999.– №5. –
С. 29-31.
39. Темников, Ф.Е. Теоретические основы информационной техники.
Учебное пособие для вузов/ Ф.Е.Темников, В.А. Афонин, В.И.Дмитриев. –
М.: Энергия, 1979.– 512 с.
40. Тулупов,
Л.П. Автоматизированные системы управления
перевозочными процессами на железных дорогах/ Л.П.Тулупов. – М.:
Транспорт, 1991.– 248 с.
41. Цветков, Э. И. Методы электрических измерений / Э. И.Цветков.–
Ленинград: Энергоатомиздат, 1990. – 318 с.
42. Шалягин, Д.В. Система диспетчерского управления "Диалог" / Д.В.
Шалягин, В.А. Камнев, А.Ю.Крылов // Автоматика, телемеханика и связь. –
1996. – №9.– С.21-22.
147
43. Шевцов, В.А. Технология ослуживания аппаратуры УКП СО/
В.А.Шевцов,
С.А.Шиголев,
В.А.Чеблаков
//Автоматика,
связь,
информатика.– 2001.– №11.– С. 18-21.
44. Шелухин, В.И. Датчики измерения и контроля устройств
железнодорожного транспорта/ В.И.Шелухин. – М.: Транспорт, 1990. 119 с.
45. Шиголев, С.А. Путевой датчик ДПЭП системы УКП СО/
С.А.Шиголев, В.А.Шевцов, Г.В. Хохряков, Б.С.Сергеев //Автоматика, связь,
информатика.– 2001.–№3.–С. 9-11.
46. Шиголев, С.А. Станционная аппаратура системы УКП СО/
С.А.Шиголев,
В.А.Шевцов,
Б.С.Сергеев
//Автоматика,
связь,
информатика.– 2000.– №11.– С.10–14.
47. Щиголев, С.А. Аппаратура счетных пунктов системы УКП СО /
С.А.Щиголев, В.А. Шевцов, Б.С.Сергеев // Автоматика, связь и
информатика.– 1999. –№12 – С.11-14.
48. Щиголев, С.А. Система устройств контроля перегона методом
счета осей. Учебное пособие для слушателей ФПК по дисциплине
Современные устройства СЦБ/ С.А.Щиголев, Б.С. Сергеев. –
Екатеринбург: УрГУПС. 1999. – 44 с.
49. Щиголев, С.А. Структурная и принципиальная схемы системы УКП
СО/ С.А.Щиголев, В.А. Шевцов, Б.С.Сергеев // Автоматика, связь и
информатика.– 1999. –№6 – С.12-15.
50. Ягудин, Р.Ш. Системы диспетчерского управления на основе микро-ЭВМ/ Р.Ш. Ягудин // Автоматика, телемеханика и связь – 1996. – №3.–
С.15-18.
51. Автоматизация средств контроля параметров рельсовой колеи на
базе вагон-лаборатории/ под ред. С. В. Архангельского, В. Б. Каменского,
В. П. Конакова. – Самара: Самарский науч. центр РАН, 2002. – 236 с
52. Баранов, В.А. Подсистема контроля колес/ В.А. Баранов.–
Екатеринбург: Уральский государственный университет путей сообщения,
2002- 12 с.
53. Наговицын, В.С. Комплексная информационно-измерительная
система технического диагностирования подвижного состава/ В.С.
Наговицын, А.А. Колмыков, В.И. Елфимов // Автоматика, связь и
информатика.– 1999. –№6 – С.46-49.
148
СОДЕРЖАНИЕ
ВВЕДЕНИЕ ................................................................................................... 3
СОКРАЩЕНИЯ ............................................................................................. 4
Лекция 1. ОРГАНИЗАЦИЯ СИСТЕМ СБОРА ИНФОРМАЦИИ................... 5
1.1. Понятия и определения в информационно-измерительной технике ................................................................ 5
1.2. Автоматизация сбора и обработки данных ......................................................................................................... 8
1.3. Состав комплексной информационной системы железнодорожного транспорта ......................................... 11
1.4. Состав и структура системы АСУ-Ш-2 ............................................................................................................. 18
1.5. Заключение ........................................................................................................................................................... 20
Лекция 2. ТЕХНИЧЕСОКЕ ОБЕСПЕЧЕНИЕ СИСТЕМ СБОРА
ИНФОРМАЦИИ .......................................................................................... 21
2.1. Принципы построения средств измерений ........................................................................................................ 21
2.2 Классификация средств измерений ..................................................................................................................... 22
2.2.1. Элементарные средства измерений ............................................................................................................. 23
2.2.2. Комплексные средства измерений .............................................................................................................. 25
2.2.3. Информационно-измерительные системы ................................................................................................. 25
2.2.4. Измерительно-вычислительные комплексы ............................................................................................... 27
2.3. Системы видеонаблюдения ................................................................................................................................ 28
2.4. Заключение ........................................................................................................................................................... 29
Лекция 3. КЛАССИФИКАЦИЯ И РАЗНОВИДНОСТИ ДАТЧИКОВ ........... 30
3.1. Преобразование измеряемой величины в процессе измерений ....................................................................... 30
3.2. Область применения датчиков на ж.–д. транспорте ......................................................................................... 31
3.3. Типы датчиков ..................................................................................................................................................... 31
3.3.1. Емкостные датчики ....................................................................................................................................... 31
3.3.2. Индуктивные датчики .................................................................................................................................. 32
3.3.3. Датчики пути и скорости ............................................................................................................................. 34
3.3.4. Датчики контроля проследования поезда ................................................................................................... 35
3.3.5. Потенциометрические датчики ................................................................................................................... 36
3.3.6. Гальванический преобразователь ................................................................................................................ 37
3.3.7. Термоэлектрические преобразователи ...................................................................................................... 37
3.3.8. Оптические датчики ..................................................................................................................................... 38
3.3.9.Пьезоэлектрические преобразователи ......................................................................................................... 39
3.3.10. Тензочувствительные преобразователи (тензорезисторы) ..................................................................... 40
3.4. Заключение ........................................................................................................................................................... 42
Лекция 4. МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ СБОРА
ИНФОРМАЦИИ .......................................................................................... 42
4.1. Метрологическое обеспечение железнодорожных объектов .......................................................................... 42
4.2. Метрологические характеристики средств измерений .................................................................................... 46
4.2.1. Статические характеристики и параметры средств измерений ................................................................ 46
4.2.2. Динамические характеристики и параметры средств измерений ............................................................ 47
4.3. Классификация погрешностей измерений ......................................................................................................... 48
4.4. Заключение ........................................................................................................................................................... 50
149
Лекция 5. СИСТЕМЫ ТЕХНИЧЕСКОЙ ДИАГНОСТКИ И МАНИТОРИНГА
УСТРОЙСТВ ЖАТ ...................................................................................... 51
5.1. Системы технической диагностики ................................................................................................................... 51
5.1.1. Общие положения ......................................................................................................................................... 51
5.1.2. Прогнозирование случайных процессов ..................................................................................................... 54
5.1.3. Выбор прогнозирующих параметров .......................................................................................................... 56
5.2. Задачи систем диагностирования устройств ЖАТ ........................................................................................... 56
5.3. Лаборатория автоматики, телемеханики и связи .............................................................................................. 59
5.4. Заключение ........................................................................................................................................................... 61
Лекция 6. ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИЧЕСКИЕ Системы .......... 62
6.1. Система автоматического считывания информации с движущегося подвижного состава .......................... 62
6.1.1. Назначение и принцип действия системы .................................................................................................. 62
6.1.2. Структура системы «Пальма» ..................................................................................................................... 65
6.2. Автоматизация сбора информации о перевозочном процессе ........................................................................ 67
6.3. Классификация систем управления поездной работой .................................................................................... 69
6.4 Программируемый индустриальный контроллер .............................................................................................. 75
6.4.1 Прибор ПИК-120М ........................................................................................................................................ 75
6.4.2 Аппаратура съема аналоговой информации (ПИК 10) ............................................................................... 77
6.5. Мобильный измерительный комплекс автоматики и ....................................................................................... 78
радиосвязи ................................................................................................................................................................... 78
6.5.1. Назначение и устройство измерительного комплекса вагон–лаборатории ............................................. 78
6.5.2. Протоколы обмена данных с ПЭВМ ........................................................................................................... 82
6.5.3. Принцип действия и состав комплекса вагона-лаборатории .................................................................... 83
6.6. Заключение ........................................................................................................................................................... 86
Лекция 7. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ ПАРАМЕТРЫ ТОЧЕЧНЫХ
ПУТЕВЫХ ДАТЧИКОВ СЧЕТА ОСЕЙ ....................................................... 86
7.1. Магнитный точечный датчик прохода колес .................................................................................................... 86
7.2. Вибродатчики, используемые в подсистеме ДИСК-К ..................................................................................... 88
7.3. Индуктивные датчики в системе счета осей .................................................................................................... 90
7.4. Многофункциональные датчики ........................................................................................................................ 91
7.5. Индукционные электромагнитные путевые датчики ....................................................................................... 95
7.6. Путевой датчик системы УКП СО ..................................................................................................................... 97
7.7. Заключение ........................................................................................................................................................... 99
Лекция 8. СИСТЕМЫ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИКИ
ПОДВИЖНОГО СОСТАВА ...................................................................... 100
8.1. Диагностика технического состояния грузового поезда ................................................................................ 100
8.2. Классификация диагностических систем контроля параметров грузовых вагонов .................................... 101
8.2.1. Комплекс технических средств многофункциональный ......................................................................... 101
8.2.2. Система комплексного контроля технического состояния подвижного состава на ходу поезда ДИСК-2
................................................................................................................................................................................ 101
8.2.3. Автоматизированный бесконтактный комплекс контроля колесных пар подвижного состава .......... 101
8.2.4. Система автоматизированного контроля механизма автосцепки «САКМА» ....................................... 102
8.2.5. Автоматизированная система контроля открытых, незафиксированных и деформированных люков и
дверей грузовых вагонов ...................................................................................................................................... 102
8.2.6. Детектор дефектных колес ДДК................................................................................................................ 102
8.2.7. Автоматизированный диагностический комплекс для измерения колесных пар вагонов на подходах к
станции .................................................................................................................................................................. 103
8.2.8. Устройство контроля сползания буксы с шейки оси ............................................................................... 103
8.2.9. Устройство контроля тормозов поезда УКТП ......................................................................................... 104
8.2.10. Комплексная информационно-измерительная система технического диагностирования подвижного
состава ................................................................................................................................................................... 105
8.3. Автоматизированная система контроля подвижного состава ....................................................................... 107
8.4. Функции информационно-управляющего комплекса АСУ СПТО ............................................................... 109
8.5. Информационное взаимодействие АСУ СПТО с системами технической диагностики технического
состояния вагона ....................................................................................................................................................... 109
8.6. Заключение ......................................................................................................................................................... 111
150
Лекция 9. СИСТЕМЫ ОБНАРУЖЕНИЯ ПЕРЕГРЕТЫХ БУКС НА ХОДУ
ПОЕЗДА .................................................................................................... 112
9.1. Назначение и принцип работы аппаратуры .................................................................................................... 112
9.2. Напольное оборудование аппаратуры обнаружения перегретых букс ......................................................... 115
9.3.Комплекс технических средств КТСМ. ........................................................................................................... 118
9.4. Требования к размещению оборудования средств контроля аварийных букс ............................................. 125
9.5. Заключение ......................................................................................................................................................... 126
Лекция 10. СИСТЕМЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ
СИГНАЛИЗАЦИИ ..................................................................................... 126
10.1. Назначение и принцип действия АЛС ........................................................................................................... 126
10.2. Путевые устройства АЛС ............................................................................................................................... 131
10.3. Локомотивные устройства АЛС ..................................................................................................................... 132
10.4. Система автоматического управления торможением поездов .................................................................... 134
10.5. Комплексное локомотивное устройство безопасности ................................................................................ 136
10.6. Заключение ....................................................................................................................................................... 138
Лекция 11. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА С
ПОМОЩЬЮ ТЕХНОЛОГИЙ СПУТНИКОВОЙ НАВИГАЦИИ .................. 138
11.1 Назначение и принцип действия спутниковых навигационных систем ..................................................... 138
11.2. Возможность применения систем спутниковой навигации в системах интервального регулирования поездов
.................................................................................................................................................................................... 141
ЗАКЛЮЧЕНИЕ.......................................................................................... 143
РЕКОМЕНДУЕМЫЙ БИБЛИОГРАФИЧЕСКИЙ СПИСОК ....................... 145
СОДЕРЖАНИЕ ......................................................................................... 149
151
152