úÏÎÄ ÇÏÒÉÚÏÎÔÁÌØÎÏÇÏ ÐÒÏÆÉÌÉÒÏ×ÁÎÉÑ úçð
advertisement

Зонд горизонтального профилирования ЗГП-2004.
1 Программное обеспечение
1.1 Описание программ
Программное обеспечение зонда представляет собой специализированный
словарь (тулбокс), функционирующий в операционной системе Windows
9x/ME/NT/2000/XP под управлением инструментальной аналитической системы
MATLAB [1] версии 5.3 и выше. Программное обеспечение выполнено с
использованием графического пользовательского интерфейса системы
MATLAB и требует разрешающей способности экрана не менее 1024x768 точек.
Состав словаря и назначение отдельных компонент приведено в табл. 1.
Таблица 1
Назначение
Обработчик архива.
Сервис обработки избыточного помехозащитного
кода.
rst.m
rst
Остановка опроса прибора.
salinity.m
salinity
Расчёт солёности на основе электропроводности и
температуры.
tcom.dll*
tcom
Сервис обслуживания асинхронной связи.
updt.m
updt
Обработчик расчётов и отображения в реальном
масштабе времени.
zgp
Файл настроек последовательного канала связи.
zgp2004.m
zgp2004
Запуск основной программы (интерфейса
пользователя).
zgpstart.m
zgpstart
Запуск опроса прибора.
*- данные компоненты не являются принадлежностью конкретного словаря и
имеют общее назначение (могут быть использованы для обработки потока
информации независимо от типа и назначения прибора).
Файл
archtool.m
dowcrc8.dll*
Слово
archtool
dowcrc8
Исходный текст большинства программ (программных реализаций слов с
расширением .m) выполнен на внутреннем языке MATLAB Script и доступен
для просмотра редактирования. Слова, реализованные в виде динамических
библиотек (.dll) для редактирования и просмотра недоступны, поскольку
данные слова являются универсальными и необходимость их изменения
отсутствует. Исходные тексты этих компонент являются собственностью
авторов и поставке в комплекте программного обеспечения не подлежат.
При запуске и исполнении трансляция программных компонент производится
ядром системы MATLAB автоматически, поэтому словарь является
самодостаточной программной системой и не требует хранения
оттранслированных программ. В некоторых случаях, при исполнении в режиме
реального времени (слово updt) и модификации исходного текста при помощи
встроенного редактора системы MATLAB происходит повторная трансляция
изменённого слова «на лету». Это позволяет производить изменение
коэффициентов (при проведении градуировки) или изменение расчётных
формул (в случае экспериментальной необходимости) без необходимости
повторной трансляции всей программы и связанной с этим необходимости
остановки работы прибора. Результат достигается незамедлительно после
сохранения произведённых изменений. В случае наличия ошибок синтаксиса на
командное окно системы MATLAB выводятся сообщения о возникших
ошибках. Применение системы MATLAB в качестве обработчика данных
открывает практически неограниченные возможности для вычислительной
обработки с известыми пределами погрешности вычислений, а также удобный
формат вывода сообщений о критических ошибках (на английском языке с
указанием местоположения ошибки в исходном тексте), что делает возможным
диагностику даже серъёзных неисправностей непосредственно пользователем и
упрощает восприятие и анализ ошибки специалистом.
1.1.1 Слово archtool
Предназначено для создания файла архива, записываемого в файл в виде
колонок ASCII-строк рассчитанных гидрофизических параметров. Файл
формируется в виде, доступном для прочтения при помощи любого текстового
редактора или табличных процессоров, например Microsoft Excel. Имя файла
архива назначается словом archtool автоматически и формируется из текущей
даты (число, месяц) и времени (часы, минуты, секунды). Файлы архива
располагаются в подкаталоге /DATA основного рабочего каталога словаря
(например, /ZGP2004). Подкаталог при его отсутствии создаётся автоматически
(рис. 1).
Рис. 1
Имя файла архивных данных имеет следующий вид и расшифровку:
DDMMHHmm.zSS,
где DD – текущая дата (от 01 до 31),
MM – текущий месяц (от 01 до 12),
HH – текущий час в 24-часовом формате суток (от 00 до 23),
mm – текущая минута (от 00 до 59),
z – фиксированный символ (zond),
SS – текущая секунда (от 00 до 59).
Пример:
11030927.z21
-
файл создан 11 марта (3-й месяц) в 09 часов 27 минут на 27 секунде. Символ
«z» обозначает принадлежность к зонду.
Вызов: archtool(‘create’)
Вызывающее слово должно поддерживать глобальную переменную с именем hf
(объявление global hf), в которую будет записан файловый дескриптор,
указывающий на только что созданный файл архива. Дескриптор необходим для
записи и чтения файла архива при помощи слов fwrite и fread, а также
корректного закрытия файла при помощи слова fclose. Наличие глобальной
переменной hf обязательно.
В составе словаря вызов происходит скрыто при активации пункта меню
«Архив->Создать» основного графического интерфейса, а также каждые 30
минут при исполнении слова updt. Обращения пользователя к этому слову
непосредственно из командной строки в процессе работы зонда не требуется.
Файл архива открывается в режиме разделения доступа запись/чтение. Запись
производится системой MATLAB, чтение может осуществлять любое
приложение.
1.1.2 Слово dowcrc8
Служит для обработки низкоуровневого протокола двоичного обмена с зондом
– генерации и проверки 8-разрядного циклического кода Хэмминга,
добавляемого к командам, идущим по каналу связи в сторону зонда и данным,
идущим в обратном направлении, с целью обнаружения ошибок и защиты от их
воздействия на достоверность приёма информации. При несовпадении
избыточного кода данные, на которых были обнаружены ошибки,
игнорируются и используется предыдущее значение. В случае исполнения
команд зондом при наличии несовпадения команда на зонде не исполняется и
требуется её повторная выдача.
Генератор 8-разрядных циклических контрольных кодов на основе многочлена
Хэмминга X8+X5+X4+1 рекомендован международными стандартами ISO, IEEE
и CCITT для организации обмена последовательностями данных длиной до 64
разрядов по последовательным каналам связи в условиях повышенного уровня
импульсных помех. Код позволяет выявлять следующие дефекты потока:
1) Любое нечётное число ошибок в пределах 64-разрядного «окна»,
2) Все двойные ошибки в пределах 64-разрядного «окна»,
3) Любую пачку ошибок (1-8 искажений) в пределах 8-разрядного «окна».
4)
Вычисление производится циклическим методом на основе системы логических
уравнений обратной связи.
Вызов: dowcrc8(uint8(datavect))
или
с=dowcrc8(uint8(datavect));
где datavect – имеющаяся в рабочем пространстве переменная, содержащая
вектор данных длиной 7 8-ми разрядных символов. с – переменная для
хранения вычисленного значения избыточного кода (1 байт).
Пример:
>>d=[170 55 01 255 255 255 255];
>>crc=dowcrc8(uint8(d))
crc =
219
Полученное значение является избыточным циклическим кодом контроля для
вектора d по модулю многочлена X8+X5+X4+1.
В составе словаря вызов происходит скрыто при нажатии кнопок «Пуск» и
«Стоп» (передача команд на зонд: слова zgpstart и rst соответственно), а также
при декодировании потока данных зонда (каждого пакета) в реальном масштабе
времени. Обращения пользователя к этому слову непосредственно из
командной строки в процессе работы зонда не требуется.
1.1.3 Слово rst
Служит для остановки работы прибора. Является функцией, вызываемой
кнопкой «Стоп». Приводит прибор и графический интерфейс пользователя в
исходное состояние (ожидания). При отсутствии отклика от прибора в режимах
«Работа» и «КФ» по истечении 20 попыток связи выдаёт сообщение «Истечение
таймаута. Ответ от прибора не получен» на командное окно системы MATLAB
и окна графического интерфейса, сообщающего об ошибке. Вид этого окна
приведён на рис. 2
Рис. 2
В процессе подачи команд на зонд каждая попытка связи отмечается на
командном окне системы MATLAB точкой:
Пример (ошибочная остановка):
» Остановка ........................Истечение таймаута. Ответ от прибора не получен.
OK.
Вызов: rst
Параметров не требуется.
Ввод слова rst пользователем непосредственно в командную строку системы
MATLAB приводит к тому же результату, что и нажатие кнопки «Стоп» в
графическом интерфейсе пользователя. Это альтернативный способ остановки
работы прибора.
1.1.4 Слово salinity
С помощью этого слова производится расчёт солёности на основе стандартной
формулы [2] исходя из значений удельной электрической проводимости и
температуры, получаемых по каналу связи с зонда.
Вызов: salinity(cond, temp)
или
s= salinity(cond, temp);
где cond – имеющаяся в рабочем пространстве переменная, содержащая вектор
значений электропроводности ( в мСм/м ), temp - переменная, содержащая
соразмерный с длиной вектора cond вектор значений температуры ( в C ). s –
переменная для хранения вычисленного значения солёности ( в промилле ).
Длина вычисленного вектора будет соразмерна длинам входных векторов.
В процессе работы зонда слово salinity периодически вызывается при
исполнении слова updt ( при получении очередной порции данных по каналу
связи с зондом ). Непосредственного вызова этого слова пользователем не
требуется, однако пользователь может использовать это слово как
«калькулятор» солёности по результатам исследований, вычислений или
одиночных измерений:
Пример:
Дано:
Электропроводности в трёх точках диапазона: 3417, 5966 и 591 мСм/м
Температуры в этих точках: 20C, 25C, и 1C соответственно.
Найти солёности в этих точках.
» sal=salinity(3417, 20)
» sal=salinity([3417 5966 591], [20 25 1])
sal =
24.0295 39.9619
6.0418
Ответ:
Они составляют 24.0295, 39.9619 и 6.0418 промилле соответственно.
Для справки: по океанологическим таблицам [3]: 24, 40 и 6 соответственно.
1.1.5 Слово tcom
Представляет собой универсальный сервис поддержки последовательной связи
со внешними устройствами для системы MATLAB. Для инициализации канала
связи использует параметры канала, записанные в специализированном
(конкретном для данного прибора) файле настроек. Для зонда ЗГП-2004 этот
файл называется zgp ( без расширения ). Файл содержит имя последовательного
порта и стандартизованные параметры установки связи (скорость передачи,
формат и т.д.). Поскольку данный сервис не является принадлежностью
конкретного словаря, он имеет независимую документацию. Подробное
описание возможностей сервиса (синтаксис вызовов, параметры, ошибки и
принцип составления файла настроек) приведено в этой документации.
Непосредственного вызова этого слова пользователем не требуется. Вызов
осуществляется при запуске графического интерфейса пользователя словом
zgp2004 ( для инициализации ) и при закрытии основного окна графического
интерфейса пользователя ( для освобождения канала). В процессе работы сервис
tcom активен и вызывает периодическое исполнение слова updt (задаётся через
файл настроек zgp параметром \timerproc{updt}) для сбора и обновления
информации. Период исполнения ( 1 с ) задаётся в файле настроек (параметром
\period{1000}). Период выбран с учётом скорости потока данных с зонда и
минимизации расхода вычислительной мощности процессора при сохранении
комфортного отображения данных (графическое окно обновляется каждую
секунду).
При нажатии кнопки «Пуск» происходит активация сервиса, о чём
свидетельствует появившееся на командном окне системы MATLAB
сообщение:
» Режим MATLAB: GLOBAL ComOutx
Обработчик: updt
Период регенерации: 1000 мс
Запущен асинхронный таймер #182
Примечание: Номер асинхронного таймера – машинно-зависимая величина,
может иметь произвольное значение.
При нажатии кнопки «Стоп» происходит «приостановка» сервиса без его
закрытия (при удержании канала связи занятым).
1.1.6 Слово updt
Является исполнительным ядром словаря зонда. С его помощью производятся
основные операции:
-
получение и дешифрация данных от зонда через канал связи,
вычисление гидрофизических параметров на основе градуировочных
коэффициентов по всем каналам,
цифровая фильтрация в заданных диапазонах,
преобразование в ASCII-формат с необходимой точностью,
запись ASCII-строк в файл архива,
обновление и отрисовка графиков в основном окне графического
интерфейса пользователя,
обработка ошибок связи.
Исходный текст программной реализации этого слова (файл updt.m) открыт для
просмотра и редактирования. Файл снабжён внутренними комментариями к
отдельным вычислительным секциям, несущим определённую смысловую
нагрузку. Комментарии в целях переносимости выполнены на английском
языке. Вмешательство пользователя или лица, производящего градуировку
требуется только в секцию под комментарием:
% Calculating physical values by calibration data
(Вычисление физических величин по градуировочным данным).
Возможно изменение как градуировочных коэффициентов, так и расчётных
формул без необходимости полной трансляции программы. При работе зонда в
случае внесения каких-либо изменений в программную реализацию слова updt
эти изменения вступают в силу немедленно после их сохранения (нажатия
«Ctrl+S» или «Save» (Сохранить)). Применение происходит при поддержке
скрытой трансляции выполнения. Это делает
градуировки в реальном масштабе времени.
возможным
проведение
Цифровая фильтрация в заданных диапазонах осуществляется при помощи
стандартного для системы MATLAB слова filter из словаря Signal Processing
Toolbox. При запуске пользовательского интерфейса словом zgp2004 в рабочем
пространстве формируются многочлены рекурсивных эллиптических цифровых
фильтров 4-го порядка. Формирование происходит при помощи слова ellip из
словаря Signal Processing Toolbox:
% Filters
ripple=0.1;
order=4;
f_freql=0.01 ;
% от 0.01 Гц
f_freqh=1 ;
% до 1 Гц
attenuation=40 ;
[bfc, afc]=ellip(order, ripple, attenuation, [f_freql f_freqh]*2/4);
[bft, aft]=ellip(order, ripple, attenuation, [f_freql f_freqh]*2/4);
Фильтрация происходит по “эстафетному”
предшествующего состояния фильтра:
методу
с
добавлением
% Filtering Conductivity & Temperature data via selected bands.
[SigmaC, fltC]=filter(bfc, afc, UC, fltC);
[SigmaT, fltT]=filter(bft, aft, UT, fltT);
Отфильтрованный таким образом сигнал отображается на графике (SigmaT) и
записывается в архивный файл (SigmaT, SigmaC).
Вызов: updt
Параметров не требует.
Непосредственного вызова этого слова пользователем не требуется. Вызов
осуществляется периодически сервисом tcom.
1.1.7 Слово zgp2004
Осуществляет запуск основного графического окна интерфейса пользователя и
приведение системы в состояние готовности к приёму и обработке данных. Для
запуска пользователь должен вызвать слово zgp2004, напечатав это слово в
командной строке системы MATLAB и подтвердить нажатием клавиши
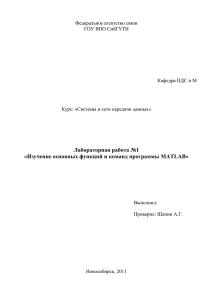
<Enter>. При этом открывается окно графического интерфейса пользователя,
показанное на рис. 3.
Рис. 3
Окно, являясь объектом системы MATLAB, содержит стандартные элементы,
известные по окнам операционной среды Windows: строку заголовка, строку
меню, кнопки, поля ввода, вывода и редактирования текстовой информации,
поля отображения графической информации. Различие заключается в
обработчике, которым является ядро системы MATLAB, а не Windows.
Обработчик перехватывает все сообщения о вводе, выводе и изменении,
проверяет корректность выполненных операций, возвращает результат и
ошибку. Последняя (в случае её наличия) отображается в командном окне
системы MATLAB, постоянно находящейся в памяти. По этой причине
функционирование программного обеспечения без системы MATLAB является
невозможным.
В строке меню расположены два пункта: «Архив» и «Режим» (рис. 4)
Рис. 4
Пункт «Архив», исходно недоступный («серый»), становится доступным при
запуске обработки нажатием кнопки «Пуск». Этот пункт служит для включения
записи информации в кодах ASCII в архивные файлы. При работе
программного обеспечения нажатие этого пункта приводит к возвращению его в
«недоступное» состояние и началу записи архива. Возвратить этот пункт в
доступное состояние можно только остановкой (нажатием кнопки «Стоп») и
последующим повторным нажатием кнопки «Пуск». Предыдущий архив при
этом закрывается и создаётся новый.
Пункт «Режим» служит для управления режимом работы прибора и
программного обеспечения. Исходно доступен. При нажатии этого пункта
появляется подменю, показанное на рис. 5.
Рис. 5
Оно содержит три пункта: «КФ», «Работа» и «Эмуляция». Выбранный пункт
(выбор происходит перемещением указателя подсветки по пунктам с помощью
«мыши» и нажатием на левую кнопку на желаемом пункте) отмечается
«галочкой». В режимах «КФ» и «Работа» при запуске и остановке происходит
попытка обращения к зонду по каналу связи. В режиме «Эмуляция» обращения
к зонду не происходит и программное обеспечение работает в
«демонстрационном» режиме с программным моделированием сигналов зонда.
Исходно установлен режим «Работа». При запуске кнопкой «Пуск» меню
«Режим» переходит в недоступное состояние и становится доступным после
остановки нажатием кнопки «Стоп». Оно также переходит в доступное
состояние после истечения таймаута (20 с) при неуспешной попытке связи с
зондом в режимах «КФ» и «Работа».
Кнопка «Пуск» служит для запуска обработки данных во всех режимах Исходно
находится в доступном состоянии. При её нажатии происходит активация
сервиса tcom и начало опроса. Кнопка при этом становится недоступной. Вновь
она станет доступной при остановке нажатием на кнопку «Стоп» во всех
режимах или после истечения таймаута (20 с) при неуспешной попытке связи с
зондом в режимах «КФ» и «Работа». При успешной связи строка заголовка
отображает статус работы программы: на рис. 5, рис. 6 и рис. 7 приведены
примеры строки заголовка для работы в режимах «КФ», «Работа» и «Эмуляция»
соответственно.
Рис. 5
Рис. 6
Рис. 7
При работе и выполнении архивации данных в строке заголовка кроме режима
отображается полный путь и имя текущего файла архива, в который
записывается информация. Имя файла изменяется каждые 30 минут
(открывается новый том архива, а предшествующий закрывается и остается на
диске для последующего анализа пользователем). Пример строки заголовка для
режима «Эмуляция» с архивацией приведён на рис 8.
Рис. 8
После нажатия на кнопку «Пуск» в командном окне системы MATLAB должно
присутствовать сообщение:
.Режим MATLAB: GLOBAL ComOutx
Обработчик: updt
Период регенерации: 1000 мс
Запущен асинхронный таймер # …
Посторонних сообщений в течении всей работы присутствовать не должно. При
их появлении это свидетельствует об ошибках и сбоях, которые должны быть
возможно точнее определены, путём копирования возникших сообщений,
оформления их протоколом об отказе и последующим анализом, возможно с
привлечением специалистов.
Примечание: При первичном запуске (из отключённого состояния) может
возникнуть сообщение вида:
«Ошибка таймаута АЦП - произошла потеря данных !».
Это не является признаком отказа, если при дальнейшей работе выдача этого
сообщения не повторяется. Многократная выдача этого сообщения говорит о
нарушениях в канале связи, качестве питания зонда или неправильном
функционировании драйверов канала связи на компьютере.
Кнопка «Стоп» служит для остановки процесса обработки данных.
Программное обеспечение при её нажатии переходит в исходное состояние. Эта
кнопка всегда находится в доступном состоянии и при её нажатии из исходного
состояния в строке заголовка окна появляется сообщение о статусе остановки:
на рис. 9, рис. 10 и рис. 11 приведены примеры строки заголовка для остановки
в режимах «КФ», «Работа» и «Эмуляция» соответственно.
Рис. 9
Рис. 10
Рис. 11
Поля текстового ввода, расположенные в правой части окна возле осей
координат служат для ввода верхнего и нижнего пределов по осям значений для
каждой из графически отображаемых величин. Ввод осуществляется цифрами,
знак десятичного разделителя – символ «точка» («запятая» недопустима !!!).
После корректного ввода значения следует нажать <Enter> при нахождении
курсора в соответствующем поле для применения. Альтернативный способ
применить введённое значение – переместиться нажатием «мыши» в другое
поле. Верхнее поле задаёт верхний предел по оси ординат, нижнее – нижний.
Если верхнее поле будет иметь значение, меньшее или равное нижнему,
изменения масштаба при применении значений не произойдёт. Следует
повторить ввод корректных значений.
Ось абсцисс на всех графиках синхронизирована во времени и отображает
время от начала запуска ( в секундах ). Отображается фиксированный интервал
в 1000 с (10 периодов сигнала низшей из диапазона частот – 0.01 Гц). При
переполнении за 1000 с ось абсцисс «сдвигается» на 100 с: все значения оси
увеличиваются на 100 с, при этом от конца графика до максимального значения
выделяется незаполненный интервал в 100 с, который продолжает заполняться.
По окончании заполнения процесс повторяется. Изменения происходят
синхронно по всем графикам.
Поля осей координат позволяют осуществлять выделение участка с помощью
«мыши» (растягивать участок по осям). При наведении указателя «мыши» в
какую-либо точку внутри осей координат, нажатии левой кнопки, и
перемещении «мыши» при удержании кнопки нажатой на графике появляется
пунктирный прямоугольник, отмечающий будущую область отображения. Его
размеры меняются при перемещении «мыши». При отпускании кнопки «мыши»
значения пределов поля осей координат по абсциссе и ординате приобретают
значения координат углов этого прямоугольника, а сам прямоугольник исчезает.
Участок графика, находившийся на момент отпускания кнопки «мыши» внутри
прямоугольника, «разворачивается» на всё поле осей согласно выделенным
пределам. Система MATLAB контролирует погрешность масштабирования:
если выделенные пределы слишком малы, в командном окне появляется
предупреждение:
Warning: Requested axes limit range too small; rendering with minimum range
allowed by machine precision.
(Внимание: Требуемый диапазон пределов по осям слишком мал; произведена
компоновка масштаба, позволяемого машинной погрешностью).
Погрешность отображения сохраняется в допускаемых пределах. Для возврата к
предыдущему масштабу необходимо нажимать правую кнопку «мыши». При
достижении исходного масштаба реакция на нажатие правой кнопки
прекращается. По истечении максимум 100 с графики автоматически
возвращаются в состояние полного масштаба.
Графики отображаются различными цветами. Аналогичные цвета имеет фон
полей текстового вывода, отображающих численное значение средних величин
измеряемых гидрофизических параметров. Эти поля находятся в правом
верхнем углу над каждым из полей графиков.
ВНИМАНИЕ!
При работе прибора и программного обеспечения НЕ ДОПУСКАЕТСЯ
непосредственное использование в командном окне системы MATLAB
вызовов словосочетания вида «clear all», «close all», «tcom(‘read’)»,
«tcom(‘write’, …)» или «tcom relax». Это приводит к нарушению
целостности переменных в рабочем пространстве и дальнейшей
некорректной работе программного обеспечения (или полному её
нарушению).
1.1.8 Слово zgpstart
Служит для запуска работы прибора и обработки информации. Является
функцией, вызываемой кнопкой «Пуск». Приводит прибор и графический
интерфейс пользователя в состояние, задаваемое пунктами подменю «Режим», а
также активизирует сервис tcom на периодическое исполнение слова updt. При
отсутствии отклика от прибора в режимах «Работа» и «КФ» по истечении 20
попыток связи выдаёт сообщение «Истечение таймаута. Ответ от прибора не
получен» на командное окно системы MATLAB и окна графического
интерфейса, сообщающего об ошибке, аналогичного приведённому на рис. 2.
В процессе подачи команд на зонд каждая попытка связи отмечается на
командном окне системы MATLAB точкой:
Пример (ошибочный запуск):
» ........................Истечение таймаута. Ответ от прибора не получен.
Вызов: zgpstart
Параметров не требуется.
Ввод слова zgpstart пользователем непосредственно в командную строку
системы MATLAB приводит к тому же результату, что и нажатие кнопки
«Пуск» в графическом интерфейсе пользователя. Это альтернативный способ
запуска работы прибора.
1.2 Установка программного обеспечения
Для установки программного обеспечения зонда необходимо иметь на целевом
компьютере установленную систему MATLAB указанных версий. Установка
словаря заключается в копировании каталога /ZGP2004 с компакт-диска в
желаемый раздел жёсткого диска компьютера.
До начала работы необходимо произвести настройку коммуникаций. Если на
компьютере отсутствует последовательный интерфейс (COM-порт), следует
произвести установку USB-COM адаптера. Установка производится согласно
инструкции, прилагаемой к адаптеру. Далее, открыв «Панель управления>Оборудование->Диспетчер устройств->Порты COM и LPT» найти имя порта,
соответствующего физическому порту, к которому подключён зонд. Это имя
следует запомнить или записать.
Запустив систему MATLAB, перейти в каталог ZGP2004:
>>cd <диск>:/<путь>/ZGP2004 <Enter>
где <диск> - имя диска, на котором расположен каталог словаря zgp2004,
<путь> - полный путь до каталога словаря, <Enter> - нажатие клавиши Enter.
Вызвать на редактирование файл настроек zgp с помощью встроенного
редактора словом edit:
>>edit zgp
<Enter>
Откроется окно с текстом следующего содержания:
\confblock{COM4}\baudrate{57600}\parity{none}\databits{8}\stop{1}
\inbuflength{32768}\outbuflength{8}\readtimeout{0}
\timer{1}\timerproc{updt}\period{1000}
\endconfblock{}
Следует заменить “COM4” на найденный
и сохранить произведённые
изменения нажатием «Ctrl+S», затем закрыть окно редактора.
Далее, включив питание зонда и адаптера интерфейса произвести следующие
действия:
- запустить пользовательский интерфейс, исполнив слово zgp2004.
- Перейдя в командное окно системы MATLAB, убедиться в наличии строки
«Открыт порт COM….. ID No: 1», имя порта должно соответствовать
заданному при редактировании файла настроек. При наличии других
сообщений проверить корректность файла настроек и имя порта.
- Нажать кнопку «Стоп» в графическом интерфейсе пользователя. Строка
заголовка должна приобрести вид, показанный на рис. 9 или рис. 10. Если в
строке заголовка после нажатия кнопки «Стоп» идёт счёт секунд от 0 до 20
с последующей выдачей ошибки (рис. 2), следует проверить правильность
подключения, питание и качество кабелей, а также имя порта на
соответствие с «Панелью управления» Windows.
Если связь установлена, программное обеспечение считается настроенным и
можно начинать работу, выбрав режим и нажав кнопку «Пуск». Для завершения
работы нажать кнопку «Стоп», дождаться корректной остановки прибора, затем
закрыть окно графического интерфейса пользователя. При этом в командном
окне системы MATLAB отобразится сообщение сервиса tcom:
Порт ID No: 1 успешно закрыт.
Можно закрыть командное окно системы MATLAB.
2 Примеры записи и отображения информации
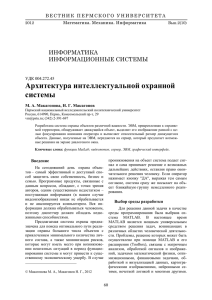
Пример обработки информации в реальном масштабе времени показан на
рис.12. Процесс протекает автоматически без участия пользователя.
Отображаются графики гидрофизических параметров и происходит запись
архивной информации.
Рис. 12
После нажатия на кнопку «Пуск» в течении первых 100 с происходит выход
цифровых фильтров на установившийся режим. Данные по каналам пульсаций в
течении этого периода являются недействительными. По этой причине
архивацию следует включать не ранее чем через 150 – 200 с, когда переходный
процесс в фильтрах полностью закончится.
Архивная информация записывается в файл в виде таблицы в ASCII-кодах.
Фрагмент начала архивного файла приведён в табл. 2
Таблица 2
Архив: начало: 09-Mar-2005 11:04:17
C
2.0588
1.9719
1.7739
SigmaC
0.0152
0.0145
0.0129
S
3.0881
2.9579
2.6609
T
4.1175
3.9439
3.5479
SigmaT
-0.0485
-0.0279
0.0342
D
-0.0485
-0.0279
0.0342
1.9415
1.8835
1.8207
2.0497
1.7021
2.0627
1.5950
2.1058
2.0687
0.0143
0.0138
0.0133
0.0151
0.0124
0.0152
0.0115
0.0156
0.0153
2.9122
2.8252
2.7311
3.0746
2.5531
3.0941
2.3925
3.1587
3.1030
3.8830
3.7670
3.6415
4.0994
3.4041
4.1254
3.1900
4.2116
4.1374
0.0386
-0.0289
-0.0397
0.0185
0.0260
-0.0114
-0.0223
-0.0107
0.0170
0.0386
-0.0289
-0.0397
0.0185
0.0260
-0.0114
-0.0223
-0.0107
0.0170
Символом разделителей величин в строках является символ табуляции. В конце
каждой строки записывается признак перевода строки и возврата каретки.
3 Функциональный контроль
Функциональный контроль осуществляется путём установки пункта подменю
«КФ» в меню «Режим» и запуска зонда кнопкой «Пуск». КФ осуществляет
контроль функционирования части электронной схемы зонда, включающей в
себя аналоговый коммутатор (мультиплексор), источник опорного напряжения,
АЦП и интерфейсные схемы, а также правильность работы драйверов
последовательного канала связи и программного обеспечения. При исправности
зонда и корректном функционировании всех систем через каждые 10 секунд на
командное окно системы MATLAB будут выводиться сообщения «КФ пройден»
или «ОТКАЗ КФ по каналу <имя канала> !», где <имя канала> может быть C –
электропроводность, T – температура, D – глубина. Далее следует дата и время
проведения контроля. В графическом интерфейсе пользователя по каналам C, T
и D должны отображаться импульсы прямоугольной (трапецеидальной) формы
со скважностью 2 (меандр). Пример для канала глубины приведён на рис. 13
(график приведён в «растянутом» с помощью «мыши» масштабе).
Рис. 13
4 Характерные неисправности и методы их устранения
Перечень характерных неисправностей и методов их устранения приведён в
табл. 3.
Проявление
неисправности
1 В режимах «Работа» и
«КФ» возникает ошибка
связи с прибором. Режим
«Эмуляция» работает
нормально.
Возможная причина
1 Нарушение контакта в
разъёмах.
2 Неправильные
настройки параметров
связи.
Таблица 3
Возможные методы
устранения
Проверить надёжность
разъёмов
Проверить содержимое
файла zgp (файл без
расширения) и номер
COM-порта по панели
управления
2 Посторонние
сообщения (об ошибках)
на командном окне
системы MATLAB,
резкие “пики” на
графиках.*
3 Нереальные значения
регистрируемых
гидрофизических
величин.
4 Систематическое
сообщение «Ошибка
таймаута АЦП» при
работе в режимах
«Работа» и «КФ».
5 При нажатии кнопки
«Пуск» в режимах
«Работа» и «КФ»
графики не рисуются,
регистрируемые
значения не изменяются.
3 Отказ источника
питания зонда или
адаптера интерфейса.
1 Сильные импульсные
помехи в линии связи
или на питании
(неисправимые ошибки).
2 Нарушение контакта в
разъёмах.
3 Нарушение работы
операционной системы
1 Нарушение
целостности переменных
в рабочем пространстве
системы MATLAB (как
правило, следствие
некорректных действий
пользователя при
работающем приборе).
2 Нарушение работы
операционной системы
3 Выход из строя зонда в
целом или отдельных
датчиков
1 Нарушение
целостности переменных
в рабочем пространстве
системы MATLAB (как
правило, следствие
некорректных действий
пользователя при
работающем приборе).
2 Нарушение работы
операционной системы
3 Сбой микропрограммы
контроллера зонда
Проверить источники
питания и адаптер
интерфейса.
Выявить и устранить
источник помех.
Проверить надёжность
разъёмов.
Перезагрузить
компьютер.
Остановить работу
прибора, выйти из
системы MATLAB,
закрыв командное окно,
войти в систему
MATLAB заново и
запустить работу
прибора.
Перезагрузить
компьютер.
Проверить техническое
состояние зонда и
устранить повреждения.
Остановить работу
прибора, выйти из
системы MATLAB,
закрыв командное окно,
войти в систему
MATLAB заново и
запустить работу
прибора.
Перезагрузить
компьютер.
Выключить питание
зонда, отключить разъём
зонда от блока питания,
выждать время около 5
мин, восстановить
соединение и повторить
попытку запуска.
4 Помехи (неисправимые Проверить линию связи,
ошибки) в линии связи
устранить причину
возникновения помех.
Аналогично п. 4
Аналогично п. 4
Имя зонда в строке
заголовка окна
появляется.
6 При нажатии кнопки
«Пуск» или «Стоп» в
режимах «Работа» и
«КФ» графики не
рисуются,
регистрируемые
значения не изменяются.
Вместо имени зонда в
строке заголовка окна
появляется
бессмысленный набор
символов. Далее могут
быть признаки по пп. 2
или 3.
1 Нарушение работы
операционной системы
2 Сбой микропрограммы
контроллера зонда.
3 Разгерметизация или
другое нарушение
качества кабеля
Перезагрузить
компьютер.
Выключить питание
зонда, отключить разъём
зонда от блока питания,
выждать время около 5
мин, восстановить
соединение и повторить
попытку запуска.
Проверить качество
линии связи и устранить
повреждение.
4 Отказ источника
питания зонда или
адаптера интерфейса.
Проверить источники
питания и адаптер
интерфейса.
7 Неустойчивый запуск и 1 Неисправность
остановка прибора.
адаптера интерфейса
8 При нажатии кнопки
«Пуск» или «Стоп» в
режимах «КФ» или
«Работа»
соответствующая кнопка
нажимается, после
отпускания «мыши» не
«отжимается», отклик
прибора отсутствует
1 Некорректная работа
или сбой драйвера USBCOM интерфейса
вследствии воздействия
на него случайных
данных при включении
оборудования.
Проверить адаптер
интерфейса и устранить
неисправность.
Нажать Alt+Ctrl+Del
(одновременно), в
появившемся списке
«Диспетчера задач»
Windows найти
«MATLAB Command
Window» и нажать
кнопку «Снять задачу».
На предупреждение
ответить «Да» («Yes»).
Отключить разъём USB
от порта компьютера
(источники питания
зонда НЕ
ОТКЛЮЧАТЬ).
Спустя около 5 – 10 с
подключить разъём USB
заново.
Запустить MATLAB и
повторить попытку
соединения с зондом.
При систематических
неудачах переустановить
драйвер USB-COM.
*- должен быть составлен протокол с полным приведением выводимых
сообщений и произведён их анализ с привлечением специалистов или опытных
пользователей системы MATLAB.
5 Список использованных источников
1. Потёмкин В. Г. Система MATLAB: Справочное пособие. М.: «ДиалогМИФИ», 1997.
2. Калашников П. А. Первичная обработка гидрологической информации. Л.:
«Гидрометеоиздат», 1985.
3. Океанологические таблицы. Л.: «Гидрометеоиздат», 1975.