doc - Институт прикладной математики им. М.В. Келдыша РАН
реклама

Институт прикладной математики
им. М. В. Келдыша РАН
В. А. Сарычев
Равновесные ориентации и устойчивость
осесимметричного спутника-гиростата
на круговой орбите под действием
гравитационного момента
Москва, 2010г.
1
Уравнения движения спутника-гиростата (круговая орбита)
Ap (C B)qr 302 (C B)a32a33 h2r h3q 0,
Bq ( A C )rp 302 ( A C )a33a31 h3 p h1r 0,
(1)
Cr ( B A) pq 302 ( B A)a31a32 h1q h2 p 0;
p ( 0 )a21 p 0a21,
q ( 0 )a22 sin q 0a22 ,
(2)
r ( 0 )a23 cos r 0a23.
a11 cos( x, X ) cos cos ,
a12 cos( y, X ) sin sin cos sin cos ,
a13 cos( z, X ) sin cos cos sin sin ,
a21 cos( x,Y ) sin ,
a22 cos( y,Y ) cos cos ,
a23 cos( z,Y ) cos sin ,
a31 cos( x, Z ) sin cos ,
a32 cos( y, Z ) cos sin sin sin cos ,
a33 cos( z, Z ) cos cos sin sin sin .
n
n
n
i 1
i 1
i 1
(3)
Здесь h1 Jiii , h2 Ji ii , h3 Ji ii .
Более удобно использовать параметры
h1 0h1, h2 0h2, h3 0h3.
2
Положения равновесия спутника-гиростата
0, 0, 0.
Пусть A B C . Тогда из (1) – (2) имеем
(C B)(a22a23 3a32a33) h2a23 h3a22 0,
( A C )(a23a21 3a33a31) h3a21 h1a23 0,
(B A)(a21a22 3a31a32 ) h1a22 h2a21 0.
(4)
4( Aa21a31 Ba22a32 Ca23a33 ) (h1a31 h2a32 h3a33 ) 0,
Aa11a31 Ba12a32 Ca13a33 0,
( Aa11a21 Ba12a22 Ca13a23 ) (h1a11 h2a12 h3a13 ) 0.
(5)
2 a 2 a 2 1,
a11
a11a21 a12a22 a13a23 0,
12
13
2 a 2 a 2 1, a a a a a a 0,
a21
22
23
11 31
12 32
13 33
2 a 2 a 2 1, a a a a a a 0.
a31
21 31
22 32
23 33
32
33
(6)
Прямая задача: заданы параметры A, B, C, h1, h2, h3 . Необходимо
определить 9 направляющих косинусов.
4(C B)a32a33
4( A C )a33a31
4(B A)a31a32
, a12
, a13
,
F
F
F
(7)
4( I3 A)a31
4( I3 B)a32
4(I3 C )a33
a21
,
a22
,
a23
.
F
F
F
a11
2 Ba 2 Ca 2 .
Здесь F h1a31 h2a32 h3a33, I3 Aa31
32
33
3
2 a 2 (C A)2 a 2 a 2 ( A B)2 a 2 a 2 ]
16[( B C )2 a32
33
33 31
31 32
(h1a31 h2a32 h3a33 )2 ,
4( B C )(C A)( A B)a31a32a33
[h1( B C )a32a33 h2 (C A)a33a31 h3( A B)a31a32 ]
(h1a31 h2a32 h3a33 ) 0,
(8)
2 a 2 a 2 1.
a31
32
33
I. Частный случай h1 0, h2 0, h3 0. Тогда из (8) следует
2 a 2 (C A)2 a 2 a 2 ( A B)2 a 2 a 2 ] h 2a 2 ,
16[( B C )2 a32
33
33 31
31 32
2 32
(C A)[h22 4(B A)(B C )]a31a32a33 0,
(9)
2 a 2 a 2 1.
a31
32
33
Положения равновесия:
a11 1, a22 a11a33, a33 1;
a13 1, a22 a13a31, a31 1;
a11 1, a22 x, a23 a11a32 , a32 1 x 2 , a33 xa11;
a13 1, a21 a13a32 , a22 y, a31 ya13, a32 1 y 2 ;
(10)
a11 4 ya33, a12 a21a33, a21 116 y 2 , a22 4 y, a33 1;
a12 a23a31, a13 4 xa31, a22 4 x, a23 116 x2 , a31 1.
Здесь x
h2
h2
, y
.
4(B C )
4(B A)
Условия существования положений равновесия.
Достаточные условия устойчивости положений равновесия (10)
4
Интеграл энергии (постоянство Гамильтониана) – функция
Ляпунова
1 ( Ap2 Bq 2 Cr 2 ) 3 2[( A C )a 2 (B C )a 2 ]
31
32
2
2 0
(11)
1
2
2
2
2
0 [( B A)a21 ( B C )a23] 0 (h1a21 h2a22 h3a23 ) const.
2
A C 0, ( B A) h2a22 0, 4( B C ) h2a22 0;
C A 0, (B C ) h2a22 0, 4(B A) h2a22 0;
A C 0, C B 0, h22 4( A B)(C B) or
C A 0, C B 0, h22 4( A B)(C B);
A C 0, A B 0, h22 4( A B)(C B) or
(12)
C A 0, A B 0, h22 4( A B)(C B);
A C 0, A B 0, h22 4( A B)(C B);
C A 0, C B 0, h22 4( A B)(C B).
II. Частный случай h1 0, h2 0, h3 0.
2 a 2 (C A)2 a 2 a 2 ( A B)2 a 2 a 2 ]
16[(B C )2 a32
33
33 31
31 32
(h1a31 h3a33 )2 ,
a32{4(B C )(C A)( A B)a31a33
(13)
[h1( B C )a33 h3( A B)a31](h1a31 h3a33)} 0,
2 a 2 a 2 1.
a31
32
33
5
III. Общий случай: h1 0, h2 0, h3 0.
2 a 2 (C A)2 a 2 a 2 ( A B)2 a 2 a 2 ]
16[( B C )2 a32
33
33 31
31 32
(h1a31 h2a32 h3a33 )2 ,
4( B C )(C A)( A B)a31a32a33
[h1( B C )a32a33 h2 (C A)a33a31 h3( A B)a31a32 ]
(h1a31 h2a32 h3a33 ) 0,
(8)
2 a 2 a 2 1.
a31
32
33
I. Случай h1 0, h2 0, h3 0.
R. W. Longman – 1968; R. W. Longman, P. Hagedorn, A. Beck – 1981;
В. А. Сарычев, С. А. Мирер – 2001; В. А. Сарычев, С. А. Мирер,
А. А, Дегтярев – 2005.
II. Случай h1 0, h2 0, h3 0.
R. W. Longman – 1971; В. А. Сарычев, С. А. Мирер, А. А. Дегтярев – 2008.
III. Случай h1 0, h2 0, h3 0.
В. А. Сарычев, С. А. Гутник – 1984.
6
Осесимметричный спутник-гиростат ( A B C).
4( A B)a21a31 h1a31 h2a32 h3a33 0,
( A B)a11a31 0,
( A B)a11a21 h1a11 h2a12 h3a13 0,
2 a 2 2 1, a a a a a a 0,
a11
12 13
11 21
12 22
13 23
(14)
2 a 2 a 2 1, a a a a a a 0,
a21
22
23
11 31
12 32
13 33
2 a 2 a 2 1, a a a a a a 0.
a31
32
33
21 31
22 32
23 33
Случай 1
a11 0,
4( A B)a21a31 h1a11 h2a32 h3a33 0,
h2a12 h3a13 0,
2 a 2 1,
a12
13
2 a 2 a 2 1,
a21
22
23
(15)
2 a 2 a 2 1,
a31
32
33
a12a22 a13a23 0,
a12a32 a13a33 0,
a21a31 a22a32 a23a33 0;
7
Случай 2
a31 0,
h2a32 h3a33 0,
( A B)a11a21 h1a11 h2a12 h3a13 0,
2 a 2 a 2 1,
a11
12
13
2 a 2 a 2 1,
a21
22
23
(16)
2 a 2 1,
a32
33
a11a21 a12a22 a13a23 0,
a12a32 a13a33 0,
a22a32 a23a33 0.
Из (15)–случай 1-получаем после достаточно простых вычислений
a11 0, a12
h3
h22 h32
, a13
a22 a13a31, a23 a12a31,
a32 a13a21, a33 a12a21,
h2
h22 h32
,
(17)
4( A B)a21a31 h1a31 a21 h22 h32 0,
2 a 2 1.
a21
31
Рассмотрим последние два уравнения системы (17), переписав их в
виде
4a21a31 ma31 na21 0,
2 a 2 1,
a21
31
(18)
h22 h32
h1
где m
, n
.
A B
A B
Систему (18) можно переписать несколько иначе:
2 8ma3 (m2 n2 16)a 2 8ma m2 0,
16a21
21
21
21
a31
na21
.
4a21 m
(19)
8
На рис. 1, 2, 3 представлены три различных варианта взаимного
расположения ветвей гипербол и окружности.
Рис.1. Взаимное расположение окружности
и ветвей гиперболы ( m n 1)
Рис.2. Взаимное расположение окружности
и ветвей гиперболы ( m n 2 )
9
Рис.3. Взаимное расположение окружности
и ветвей гиперболы ( m n 1.6 )
Таким образом, система (18), а, следовательно, и система (17) имеет
либо восемь, либо четыре решения.
Определим границы в плоскости параметров m, n , разделяющие
области с различным числом решений системы (18).
Бифуркационными точками являются точки плоскости m, n ,
принадлежащие одновременно ветвям гипербол, не проходящих
через начало координат, и окружности; в бифуркационных точках
касательные к гиперболе и окружности совпадают. Опуская
достаточно простые выкладки, приходим к уравнению астроиды
m2 / 3 n2 / 3 42 / 3.
(20)
В области m2 / 3 n2 / 3 42 / 3 существуют восемь решений, в
области m2 / 3 n2 / 3 42 / 3 существуют четыре решения.
Случай 2 может быть рассмотрен аналогично. Применив
использованный в случае 1 подход, можно показать, что и в случае
2 границей, отделяющей область существования восьми решений
10
от области существования четырех решений, также является
астроида
m2 / 3 n2 / 3 1
(21)
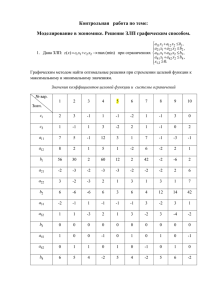
На рис.4 представлены астроиды (20) и (21), выделяющие в
плоскости m, n три области с различным числом положений
равновесия осесимметричного спутника-гиростата. В области
m2 / 3 n2 / 3 1 существуют 16 решений, в области m2 / 3 n2 / 3 1,
m2 / 3 n2 / 3 42 / 3 существуют 12 решений, в области
m2 / 3 n2 / 3 42 / 3 существуют 8 решений.
Рис.4. Области существования 16, 12 и 8 положений равновесия
11
Достаточные условия устойчивости положений равновесия
Интеграл (11) для осесимметричного спутника-гиростата ( B C )
принимает вид
1
1
2 a2 )
[ Ap 2 B(q 2 r 2 ) ( A B)(3a31
21
2
2
(h1a21 h2a22 h3a23 ) const.
(22)
Представим
0 , 0 , 0
.
Тогда интеграл энергии может быть записан следующим образом:
1
1
2 a 2 ) 2
[ Ap 2 B(q 2 r 2 ) {3( B A)(a31
11
2
2
[( B A)(3sin 2 0 1)cos20 h1a21 h2a22 h3a23] 2
(23)
2a21(h2 sin 0 h3 cos 0 ) (h2a22 h3a23) 2} const.
В случае 1 (B A 0) достаточные условия устойчивости
выполняются в областях
0 sin 0 1,
m 4sin 0 0
(24.1)
и
1 sin 0 0,
m 4sin 0 0.
(24.2)
12
В случае 2 (B A 0) достаточные условия устойчивости
выполняются в областях
0 sin 0 1,
m sin3
0
0
(25.1)
и
1 sin 0 1,
m sin3 0 0.
(25.2)
Космические исследования, 2010, №2.
Численный счет.
Осесимметричный спутник под действием гравитационного и
аэродинамического моментов
Препринт ИПМ, 2010.
13