3. Методические указания к моделированию и рекомендации к
реклама

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РЕСПУБЛИКИ КАЗАХСТАН
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
имени ШАКАРИМА города Семей
Документ СМК 3уровня
УМКД
УМКД
Редакция №1
УМКД 042-14-0203.1.20.95/03-2008
Учебно-методические
материалы по
дисциплине«Теория
линейных систем
автоматического
регулирования»
УЧЕБНО-МЕТОДИЧЕСКИЙ КОМПЛЕКС
ДИСЦИПЛИНЫ
«Теория линейных систем автоматического регулирования»
для специальности 5В070200-Автоматизация и управление
УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ
Семей
2013
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 2 из 100
Содержание
1.
2.
3.
4.
Глоссарий.
Лекции.
Практические и лабораторные занятия.
Самостоятельная работа студента.
3
6
60
98
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 3 из 100
1 Глоссарий
Совокупность объекта управления и управляющего устройства образуют
систему автоматического управления (САУ).
Машины, аппараты и другие механические устройства нуждающиеся в
специально организованных воздействиях извне для их правильного
функционирования называется объектом управления.
Технологическое устройство, с помощью которого осуществляется
автоматическое управление, называется управляющим устройством.
Управляющее воздействие – это сигнал, величина которого изменяет
состояние объектов управления в соответствии с реализуемым законом управления.
Возмущающее воздействие – это сигнал, величина которого изменяет
состояние объекта управления, препятствуя управлению.
Совокупность управляющих и возмущающих воздействий образуют
внешнее воздействие на объект управления.
Контролируемое воздействие – это воздействие, которое может быть
измерено или которое можно пронаблюдать.
Неконтролируемое воздействие – это воздействие, которое невозможно
измерить и пронаблюдать.
Задающее воздействие – это воздействие, подаваемое на вход
управляющего устройства и содержащий информацию о требуемом значении
управляемой координаты.
Управляемая координата – это величина, характеризующая реакцию
объекта управления на внешнее воздействие.
Линейной называется система, которая описывается только линейными
уравнениями. Чтобы система была нелинейной, достаточно иметь в ее составе хотя
бы одно нелинейной звено.
Для линейных САУ применим принцип суперпозиции: реакция системы на
любую комбинацию внешних воздействий равна сумме реакций на каждое из этих
воздействий, поданных на систему порознь.
Стационарной называется система, все параметры которой не изменяются
во времени.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 4 из 100
Нестационарная система – это система с переменными во времени
параметрами. При математическом описании такой системы некоторые
коэффициенты являются функциями времени.
Передаточной функцией системы (звена) называется отношение
изображения по Лапласу выходной величины к изображению по Лапласу входной
величины при нулевых начальных условиях.
Функцию U() называют вещественной частотной характеристикой, а
функцию V()- мнимой частотной характеристикой.
Зависимость отношения А() амплитуды выходного сигнала к амплитуде
входного
сигнала
от
частоты
называется
амплитудной
частотной
характеристикой (АЧХ) системы.
Зависимость фазового сдвига () между входным и выходным сигналами от
частоты называется фазовой частотной характеристикой (ФЧХ) системы.
Логарифмической амплитудной частотной характеристикой (ЛАХ)
называется кривая, соответствующая выражению
L() 20lgA()
и построенная в логарифмическом масштабе частот.
Логарифмической фазовой частотной
называется фазовая частотная характеристика
логарифмическом масштабе частот.
характеристикой
(ЛФХ)
(), построенная в
Временные характеристики представляют собой зависимость выходного
сигнала системы от времени при подаче на ее вход некоторого типового
воздействия.
В качестве типовых воздействий широкое применение находят единичное
ступенчатое воздействие и единичное импульсное воздействие.
Графическое изображение реакции системы на единичное ступенчатое
воздействие называется переходной характеристикой.
Аналитическое выражение переходной характеристики h(t) называется
переходной функцией.
Математическое выражение единичного ступенчатого воздействия может
быть записано в виде:
0 при t 0
1(t )
1 при t 0
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 5 из 100
Графическое изображение реакции системы на единичное импульсное
воздействие называется импульсной переходной характеристикой.
Аналитическое выражение импульсной переходной характеристики
обозначается ω(t) и называется импульсной переходной функцией или весовой
функцией (функцией веса).
Под единичным импульсным воздействием понимается предельно
короткий импульс
0 п р и t <
t п ри t =
0 при t >
площадь которого равна единице.
Выражение для единичного импульса δ(t) в математике принято называть
дельта-функцией.
В теории линейных систем автоматического регулирования под
структурной схемой понимается графическое обозначение математического
описания.
Сумматоры предназначены для суммирования сигналов (с учетом знака
сигнала), как и на функциональных схемах.
Для распределения сигналов по различным направлениям используются
узлы, которые обозначаются точками в местах пересечения линий связи.
Звено называется минимально-фазовым, если все нули и полюса его
передаточной функции имеют отрицательные или равные нулю вещественные
части.
Звено называют неминимально-фазовым, если хотя бы один нуль или
полюс его передаточной функции имеет положительную вещественную часть.
Объект управления называется устойчивым, если после устранения
внешнего воздействия его управляемая координата возвращается в исходное
равновесное состояние.
Объект управления называется неустойчивым, если после устранения
внешнего воздействия, как бы ни были малы его величина и продолжительность,
управляющая координата продолжает удалятся от исходного состояния.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 6 из 100
Объект управления называется нейтральным, если после устранения
внешнего воздействия управляющая координата принимает постоянное значение,
отличное от первоначального, и зависимое от величины и продолжительности
внешнего воздействия.
Время переходного процесса характеризует быстродействие системы.
Определяется как интервал времени от начала переходного процесса до момента,
когда отклонение выходной величины от ее нового установившегося значения
становится меньше определенной достаточно малой величины. Обычно это 5 %.
x(t ) x()
Перерегулирование δ называется максимальное отклонение выходной
величины хмакс на интервале переходного процесса от установившегося после
окончания перехоного процесса значения хуст, выраженное в процентах:
xmax x ycm
x ycm
100%,
Колебательность характеризуется обычно числом колебаний переходной
характеристики за время переходного процесса. В зависимости от характера
затухания различают следующие типы переходных характеристик: монотонная;
апериодическая; колебательная.
2 Лекции
Лекции – форма учебного занятия, цель которого состоит в рассмотрении
теоретических вопросов излагаемой дисциплины в логически выдержанной форме.
ТЕМА 1 Введение. Предмет и задачи курса теории автоматического управления
Теория автоматического управления – это дисциплина, служащая для
изучения статики и динамики процессов автоматического управления техническими
объектами производственными, энергетическими и транспортными.
Общая теория управления охватывает как живую, так и неживую природу,
является предметом науки кибернетики.
Принцип действия всякой системы автоматического регулирования (САР)
заключается в том, чтобы обнаруживать отклонения регулируемых величин,
характеризующих работу объекта или протекание процесса от требуемого режима и
при этом воздействовать на объект или процесс так, чтобы устранять эти
отклонения.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 7 из 100
В теории автоматического регулирования основными являются проблемы:
устойчивости, качества переходных процессов, статической и динамической
точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации).
Задачи общей теории автоматического регулирования заключаются в
решении перечисленных проблем. При поиске решений используются:
1.
2.
3.
4.
5.
Методы анализа устойчивости замкнутых САР
Методы оценки качественных показателей САР
Методы повышения точности САР
Методы коррекции динамических свойств САР
Методы синтеза САР
Разработка же методов решения прикладных инженерных задач стоящих при
проектировании САР есть глобальная цель теории систем автоматического
регулирования.
ТЕМА 2 Основные понятия и определения курса теории автоматического
управления
В общем виде САУ с одной выходной координатой, одним задающим и одним
возмущающим воздействиями представлена на рис. 1, на котором обозначено,
О – объект управления;
УУ – управляющее устройство (регулятор);
Х – выходная величина, характеризующая состояния объекта;
Y – регулирующее воздействие;
G – задающее воздействие;
F - возмущающее воздействие.
F
G
Y
УУ
ОУ
X
Рис.2.1 Общий вид САУ
На вход УУ помимо задающего воздействия поступает информация о
возмущающем и о текущем реальном значении выходной величины. В соответствии
с этим УУ полученную информацию преобразует и формирует регулирующее
воздействие.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 8 из 100
Для ознакомления с основными видами САУ и соответствующей
терминологией рассмотрим классификацию систем по ряду существенных с
позиции теории автоматического управления признаков.
А) Системы разомкнутые, замкнутые и комбинированные
В зависимости от видов используемых УУ информации различают 2 вида
САУ: разомкнутые и замкнутые.
Возможны разомкнутые САУ, в которых УУ измеряет одно задающее
воздействие «g», одно контролируемое возмущение «v» и оба сигнала
одновременно. В первом случае принято говорить, что управление осуществляется
по задающему воздействию, во втором – по возмущающему воздействию (такие
системы называют еще системами, реализующими принцип управления по
возмущению).
В замкнутых САУ на вход УУ подаются задающее воздействие g и выходная
величина объекта Х. Исходя из величины задающего воздействия управляющее
устройство определяет соответствующее требуемое значение Х и, имея
информацию о текущем значении У обеспечивает необходимое соответствие между
Х и g.
САУ такого типа представляют собой замкнутый контур, образованный ОУ и
УУ. Управляющее устройство создает обратную связь вокруг объекта, связывая его
выход с входом. Замкнутые САУ называют, поэтому еще системами с обратной
связью или системами, реализующими принцип управления по отклонению.
Именно системы с обратной связью представляют основной тип САУ.
При использовании в одной системе принципов управления по отклонению и
по возмущению получают комбинированную САУ. В этом случае повышается
качество управления, так как увеличивается информация о состоянии объекта и
внешней среды.
В) Системы линейные и нелинейные
Линейной называется система, которая описывается только линейными
уравнениями. Для линейных САУ применим принцип суперпозиций: реакция
системы на любую комбинацию внешних воздействий равна сумме реакций на
каждое из этих воздействий, поданных на систему порознь.
Нелинейной называют САУ, в составе которой имеется хотя бы одно звено,
описываемое нелинейным уравнением. К нелинейным САУ принцип суперпозиции
не применяется.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 9 из 100
С) Системы непрерывного, дискретного действия и релейные САУ
В зависимости от непрерывности динамических процессов СУ подразделяется на
САУ непрерывного действия, дискретные (импульсные, цифровые САУ) и
релейные САУ.
САУ непрерывного действия – это такая САУ, в каждом из звеньев которой
непрерывному изменению во времени входной величины соответствует
непрерывное изменение выходной величины.
САУ дискретного действия – это такая САУ, в которой хотя бы в одном
звене непрерывному изменению входной величины соответствует импульсный
характер изменения выходной величины.
Релейная САУ – это такая САУ, в которой хотя бы в одном звене
непрерывному изменению входной величины соответствует скачкообразное
изменение выходной величины в моменты времени, зависящие от значения входной
величины.
D) Системы стационарные, нестационарные и линейные с
распределенными параметрами
САУ называется обыкновенной линейной или стационарной САУ, если она
описывается обыкновенными линейными дифференциальными уравнениями с
постоянными коэффициентами.
САУ называется линейной с переменными параметрами или нестационарной,
если в системе описываемых ее линейных дифференциальных уравнений имеется
хотя бы одно уравнение, содержащее коэффициенты, являющиеся функциями
времени.
САУ называется линейной с распределенными параметрами, если в
системе описываемых ее линейных дифференциальных уравнениях имеется хотя бы
одно уравнение, содержащее частное уравнение.
Е) Одномерные и многомерные САУ
Разделение на данном уровне классификации производится по числу
выходных координат объекта управления.
F) Системы стабилизации, программного управления, следящие и с
самонастройкой
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 10 из 100
Задачей стабилизации является поддержание с установленной точностью
постоянного значения управляемой координаты. Желаемый закон в системах
стабилизации имеет вид: Y=const;
Задачей программного управления является изменение управляемой
координаты по заранее заданному закону. Существует два типа программного
управления: временное и пространственное.
Задачей управления с отслеживанием некоторого параметра являются
воспроизведение управляемой координатой изменений выбранного параметра или
некоторой ее функции.
Задачей САУ с самонастройкой является:
1 поддержание экстремального значения управляемой координаты, при
влиянии на ОУ некоторых возмущений, а также контролируемых возмущений,
закон изменения которых неизвестен;
2 поддержание оптимального сочетания контролируемых параметров или
зависящей от них вспомогательной функции (оптимальные САУ);
3 приспособление закона управления к изменившимся условиям внешней
среды (адаптивные САУ).
ТЕМА 3 Математическое описание автоматических систем
При исследовании САУ широкое применение нашли методы математической
формализации решаемых задач, составление и решение или анализ
дифференциальных уравнений отдельных звеньев или системы в целом. Для
реализации этих методов необходимо:
I указать:
1 внешнее воздействие, рассматриваемое в качестве причины изменения
состояния ОУ;
2 управляемые координаты (такие характеристики, которые могут быть
непосредственно измерены);
II установить логическую причинно-следственную зависимость между
выбранными величинами. Для этого нужно выявить параметры состояния объекта и
константы определяющие связь между контролируемыми внешними воздействиями
и управляемыми координатами;
III на основании результатов записать уравнение связи между выбранными
величинами;
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 11 из 100
IV с помощью уравнении связи получить аналитическую или структурную
модель. Структурную модель удобно использовать при исследовании САУ с
помощью аналоговых вычислительных машин. Аналитическую модель – при
использовании цифровых вычислительных машин.
ТЕМА 4 Передаточная функция объекта. Амплитудная, фазовая и
логарифмические характеристики
Целью рассмотрения САУ может быть решение одной из двух задач: задачи
анализа или задачи синтеза. Но в любом случае порядок исследования САУ
включает в себя следующие этапы: математическое описание, исследование
установившихся режимов, исследование переходных режимов.
При описании САУ очень часто используют символическую запись линейных
дифференциальных уравнений.
a n y n a n1 y
n1
.. a0 y
m
m1
k
k1
= b m u b m1 u .... c k g c k1 g .... c0 g (4.1)
n k; n m
Введем обозначение:
d
dr
r
d t =р; d t r = p
По формуле (1) это подстановка будет выглядеть таким образом:
dl
dt
l
g
di
l
= p g ; dt
i
y
d
i
= p y ; dt
u
= p u
(4.2)
После всех преобразований она будет выглядеть так:
a
n
n
p a n1 p
n 1
.. a0 y
m
m1
k
k1
= b m p b m1 p b0 u + c k p c( k1) p
Q( p) y = R1( p) u + R2( p) g
Q( p)
R1( p)
.. c0 g
(4.3)
( 4.4)
- собственный оператор;
, R2( p) - операторы воздействия
Отношение
оператора
воздействия
передаточной функцией в операторной форме.
к
собственному
называется
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 12 из 100
Передаточная функция в операторной форме по управляющему воздействию
выглядит следующим образом:
R1( p )
= Q( p ) - по управляющему воздействию;
W 1( p)
R2( p )
W 2( p)
=
Q( p )
- по возмущающему воздействию.
Используя передаточную функции в операторной форме, запишем уравнение
(4.3) в виде:
у=
W1( p) u W2( p) g
Передаточной функцией или передаточной функцией в форме изображения
Лапласа называется отношение изображение выходной величины к изображению
входной величины при нулевых начальных условиях.
Если система имеет несколько входов, то при определении передаточной
функции относительно какой-либо одной входной величины остальные величины
полагают равными нулю.
Если на вход линейной непрерывной системы (или отдельного звена) подать
синусоидальные (гармонические) колебания с постоянными амплитудой и
частотной
, то после затухания переходных процессов на выходе
также возникают синусоидальные колебания
с той же
частотой, но с другой амплитудой и сдвинутые по фазе относительно входных
колебаний. Как известно из курса "Основы теории цепей, часть 1", синусоидально
изменяющиеся величины удобно изображать с помощью комплексных амплитуд.
Комплексные амплитуды рассматриваемых здесь входных и выходных колебаний
можно записать как
и
Подавая на вход системы гармонические колебания с постоянной амплитудой,
но различными частотами, на выходе системы тоже получаем гармонические
колебания с теми же частотами, но различными амплитудами и фазами
относительно входных колебаний.
Введем в рассмотрение отношение комплексных амплитуд выходных и
входных колебаний:
(4.5)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 13 из 100
Функция
называется комплексной частотной и получается чисто
формально, без каких-либо вычислений, путем замены в выражении передаточной
функции переменной р на переменную
:
(4.6)
В различных формах записи функцию
следующем виде:
можно представить в
(4.7)
где
и
части комплексной частотной функции,
и
- действительная и мнимая
- модуль и аргумент комплексной частотной
функции.
При фиксированном значении частоты
комплексную частотную функцию
можно изобразить вектором на комплексной плоскости, как показано на рис.4.1.
Рис.4.1
Изменение частоты приведет к изменению величины и расположения
вектора на комплексной плоскости, а конец вектора опишет некоторую траекторию.
Геометрическое место концов векторов комплексной частотной функции при
изменении частоты от нуля до бесконечности называется амплитудно-фазовой
частотной характеристикой (АФЧХ).
В свою очередь все величины, представленные в (4.7), являются
соответствующими частотными функциями, а построенные по выражениям для
функций графики - частотными характеристиками.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
называется вещественной частотной, а
характеристикой.
Страница 14 из 100
- мнимой частотной
показывает
отношение
амплитуд
выходного
и
входного
гармонических сигналов при изменении частоты и называется амплитудной
частотной характеристикой.
показывает сдвиг фазы выходного гармонического сигнала
относительно входного при изменении частоты и называется фазовой частотной
характеристикой.
Между всеми частотными характеристиками существует непосредственная
связь, вытекающая из тригонометрических соотношений и поясняемая рис.4.1.
В практических расчетах чаще всего амплитудную и фазовую частотные
характеристики изображают в логарифмическом масштабе, что позволяет в
значительной степени сократить объем вычислительных работ.
Логарифмической единицей усиления или ослабления мощности сигнала
при прохождении его через какое-либо устройство при выражении десятичным
логарифмом величины отношения мощности на входе Pвых к мощности на входе Pвх
в технике принят бел. Так как мощность сигнала пропорциональна его амплитуде,
получим:
Но так как бел является достаточно крупной единицей усиления
(ослабления) мощности (увеличению мощности в 10 раз соответствует 1 Б), то за
единицу измерения ее принят децибел 1дБ=0,1 Б.
С учетом этого можно записать:
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 15 из 100
Величина логарифма амплитудной частотной характеристики, выраженная в
децибелах
xвх(t)=1(t)
называется логарифмической амплитудно-частотной характеристикой
(ЛАЧХ).
Таким образом, изменению отношения двух амплитуд в 10 раз соответствует
изменение усиления на 20 дБ, в 100 раз - на 40 дБ, в 1000 раз - на 60 дБ и т.д.
Вычислим, какому отношению амплитуд соответствует один децибел, два и
т.д.
1дБ=20lg(Aвых/Aвх);
lg(Aвых/Aвх)=1/20;
То есть 1 дБ 1,222.
2 дБ ~ (1,222)2=1,259;
3 дБ ~ (1,222)3=1,259;
4 дБ ~ 1,585;
5 дБ ~ 1,778;
6 дБ ~ 1,995 2.
Фазовая
частотная
характеристика
,
построенная
в
полулогарифмическом масштабе (в координатах: угол в градусах или радианах и
), называется логарифмической фазовой частотной характеристикой (ЛФЧХ).
За единицу измерения частоты используется логарифмическая единица
декада. Декадой называется интервал частот между какой-либо величиной частоты и
ее десятикратным значением.
В логарифмическом масштабе частот отрезок в одну декаду не зависит от
частоты и имеет длину, равную
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 16 из 100
ЛАЧХ и ЛФЧХ строят обычно совместно, используя общую ось абсцисс (ось
частот). Начало координат невозможно взять в точке
, так как
.
Поэтому начало координат можно брать в любой удобной точке в зависимости от
интересующего диапазона частот.
Точка пересечения ЛАЧХ с осью абсцисс называется частотой среза
.
Ось абсцисс соответствует значению
, то есть прохождению амплитуды
сигнала в натуральную величину (поэтому еще говорят, что на частоте среза система
теряет усилительные свойства).
Из рассмотренных здесь частотных характеристик две можно получить
экспериментально-амплитудную
и фазовую Woc(p). Из этих двух
экспериментальных остальные частотные характеристики могут быть рассчитаны по
соответствующим формулам, например
- по формуле (2.8). Кроме того,
рассчитав по экспериментальным данным
, по (2.7) путем обратной
подстановки (заменив
на р) можно получить передаточную функцию, по (2.4) - из
передаточной функции дифференциальное уравнение в операторной форме и далее,
применив обратное преобразование Лапласа - дифференциальное уравнение
(уравнение динамики системы).
ТЕМА 5 Типовые звенья и их временные и частотные характеристики.
Аппроксимация реальных объектов типовыми звеньями на основании анализа
экспериментальных переходных функций
Под временными характеристиками в общем случае понимается графическое
изображение процесса изменения выходной величины в функции времени при
переходе системы из одного равновесного состояния в другое в результате
поступления на вход системы некоторого типового воздействия.
Так как дифференциальное уравнение системы тоже определяет изменение
выходной величины в функции времени при некоторых начальных условиях, то
временная характеристика изображает собой решение дифференциального
уравнения для принятого типового воздействия и, следовательно. полностью
характеризует динамические свойства системы.
Так как временные характеристики могут быть получены не только путем
решения дифференциального уравнения, но и экспериментально, то возможность
определения динамических свойств системы по временной характеристике имеет
исключительно важное практическое значение, поскольку в этом случае не
требуется выводить и решать дифференциальное уравнение.
В качестве типовых воздействий наиболее широкое применение находят
единичное ступенчатое и единичное импульсное воздействия.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 17 из 100
Математическое выражение единичного ступенчатого воздействия может
быть записано в виде
Под единичным импульсным воздействием понимается предельно короткий
импульс
площадь которого равна единице, то есть
Выражение для единичного импульса
дельта-функцией.
в математике принято называть
Графическое изображение реакции системы на единичное ступенчатое
воздействие называется переходной характеристикой.
Аналитическое выражение переходной характеристики обозначается h(t) и
называется переходной функцией.
Графическое изображение реакции системы на единичное импульсное
воздействие называется импульсной переходной характеристикой.
Аналитическое выражение импульсной переходной характеристики
обозначается
и называется импульсной переходной функцией или весовой
функцией (функцией веса).
При практических расчетах наиболее широкое применение находит
временная характеристика в виде переходной характеристики, так как ее достаточно
просто получить экспериментально и, кроме того, определяемый ею переходный
процесс часто возникает при включениях и изменениях задающего воздействия.
При поступлении на вход системы с передаточной функцией W(p) величины
xвх(t)=1(t) на выходе получаем переходную характеристику xвых(t)=h(t).
В преобразованном по Лапласу виде входная и выходная величины
запишутся
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 18 из 100
L{h(t)}=h(p)=xвых(p).
С учетом этих соотношений получим:
(5.1)
Из последнего выражения следует, что по переходной функции можно
получить передаточную функцию.
При поступлении на вход САР величины
импульсную переходную характеристику
виде:
на выходе получаем
или в преобразованном по Лапласу
В результате определим:
(5.2)
Установим связь между переходной и импульсной переходной функциями,
приравняв правые части выражений (5.2) и (5.1):
Но так как р соответствует символу дифференцирования, то
Импульсная переходная функция является производной от переходной
функции.
В общем случае какой-либо объект в теории автоматического управления
описывается передаточной функцией, содержащей полиномы от р произвольного
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 19 из 100
порядка в числителе и знаменателе. Но если передаточная функция объекта
содержит только простой множитель в числителе (знаменатель при этом
представляет собой действительное число) либо только простой множитель в
знаменателе (числитель представляет собой действительное число), то объект
называется типовым динамическим звеном (или просто типовым звеном).
Из курса алгебры известно, что полином любого порядка можно разложить
на простые множители. То есть любую САУ можно представить в виде
последовательного соединения типовых звеньев. С другой стороны, реальные звенья
САУ могут иметь самую разнообразную физическую основу (электронные,
механические, гидравлические, электромеханические и т.п.) и конструктивное
выполнение, но иметь одинаковые передаточные функции и являться одинаковыми
типовыми звеньями. Поэтому знание характеристик звеньев столь же необходимо
для расчетов САУ, как знание таблицы умножения в арифметике.
Все линейные типовые звенья разделяют на три группы: позиционные
звенья,
интегрирующие
и
дифференцирующие.
Позиционные
звенья:
апериодическое, пропорциональное, колебательное, консервативное и чистого
запаздывания - характеризуется тем, что в каждом из них, кроме консервативного,
при подаче на вход постоянной величины с течением времени устанавливается
постоянное значение выходной величины.
В звеньях, относящихся к группе интегрирующих, при постоянном входном
воздействии выходная величина неограниченно растет.
Дифференцирующие звенья характеризуются тем, что реагируют только на
изменение входной величины.
Рассмотрим типовые звенья и их характеристики.
Пропорциональное (безинерционное) звено. Описывается уравнением и
имеет передаточную функцию:
xвых(t)=kxвх(t), W(p)=k.
Параметр k называется в общем случае коэффициентом передачи звена и
может иметь любую размерность. В частных случаях, когда k является величиной
безразмерной, принято пользоваться термином "коэффициент усиления".
Частные и временные функции звена:
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 20 из 100
Примерами таких звеньев могут служить механические связи, электронные
усилители сигналов на низких частотах и др.
Интегрирующее (идеальное) звено.
Уравнение и передаточная функция звена:
или
В случае интегрирующего звена параметр k является коэффициентом
передачи звена по скорости, численно равным скорости изменения выходной
величины при единичном значении входной величины.
Частотные и временные функции звена:
Построенные по указанным функциям характеристики звена представлены
на рис.5.1.
При построении ЛАЧХ удобно отложить точку с координатами
(при
этом
);
и провести прямую с наклоном минус 20 дБ/дек, так
как с увеличением частоты на одну декаду ордината ЛАЧХ уменьшается на 20 дБ.
(При
каком-то
значении
получаем
увеличении частоты на одну декаду, т.е. при
Разность этих ординат
20 дБ).
при
, соответственно
составляет минус
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 21 из 100
Рис.5.1
Дифференцирующее (идеальное) звено.
Уравнение и передаточная функции звена:
W(p)=kp.
Выходная величина пропорциональна скорости изменения входной
величины.
Если входная и выходная величины имеют одинаковую размерность, то
коэффициент k измеряется в секундах. В этом случае его принято обозначать через
Т и называть постоянной времени дифференцирующего звена.
Выражение для основных функций:
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 22 из 100
Как передаточная функция, так соответственно и частотные характеристики
дифференцирующего звена обратны передаточной функции и соответствующим
характеристикам интегрирующего звена.
О том, что звено с представленным математическим описанием является
идеальным, говорит, к примеру, переходная функция. Ни в каком реальном
устройстве невозможно получить скачек выходной величины бесконечной
амплитуды.
Реальные дифференцирующие звенья обладают конечной инерционностью,
вследствие чего осуществляемое ими дифференцирование не является точным.
Примером может служить тахогенератор, если за его входную величину принять
угол поворота его вала, а за выходную величину - выходное напряжение. Последнее
пропорционально угловой скорости вращения вала, которая в свою очередь равна
производной от угла поворота.
Логарифмические
приведены на рис.2.13.
частотные
характеристики
рассматриваемого
При построении ЛАЧХ удобно отложить точку с координатами
звена
(при
этом
);
и провести через нее прямую с наклоном плюс 20
дБ/дек, так как с увеличением частоты на одну декаду ордината ЛАЧХ
увеличивается на 20 дБ.
Рис.5.2
Апериодическое (первого порядка) звено.
уравнением
Описывается дифференциальным
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 23 из 100
Перейдя к изображениям, получим:
TpXвых(p)+Xвых(p)=kXвх(p)
Передаточные и частотные функции:
ЛАЧХ звена показана на рис.5.3. Но эта же характеристика может быть
представлена приближенно ломаной линией, которая показана на том же рисунке.
Эта приближенная характеристика называется асимптотической ЛАЧХ. Такое
название связано с тем, что эта характеристика составлена из двух асимптот, к
которым стремится ЛАЧХ при
и
.
Рис.5.3
УМКД 042-14-02-03.1.20.95/03-2008
При малых значениях
следовательно
Редакция №1
Страница 24 из 100
можно считать
, то есть
,
Соответственно характеристика представляет собой прямую, параллельную
оси абсцисс и проходящую на уровне 20lgk. Это есть первая асимптота, к которой
стремится ЛАЧХ при
.
С другой стороны, на больших частотах
В этом случае характеристика представляет собой прямую, имеющую
наклон минус 20 дБ/дек. Действительно, при увеличении на декаду, т.е. в 10 раз,
Таким образом, величина
уменьшилась на 20lg10, т.е. на 20 дБ. Эта
линия является асимптотой, к которой стремится ЛАЧХ при
пересекаются в точке, соответствующей частоте
называется сопрягающей частотой.
. Обе асимптоты
Поэтому эта частота
Максимальное расхождение между точной (GТ) и асимптотической (Ga)
ЛАЧХ наблюдается при частоте, равной сопрягающей.
Вычислим это расхождение, подставив в соотношения для GT и Ga значения
сопрягающей частоты
:
дБ.
От параметров звена рассматриваемая величина не зависит.
На этом же рисунке показана и ЛФЧХ: при
до минус
. При этом в точке
имеем
значение
.
изменяется от 0
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
АФЧХ представляет собой полуокружность с радиусом
Страница 25 из 100
в четвертом квадранте
комплексной плоскости и центром в точке ( , j0) на действительной оси.
Переходная функция, согласно решению уравнения звена, при xвх=1(t) и нулевых
начальных условиях имеет вид
а импульсная переходная функция
Переходная характеристика представлена на рис.5.4.
Рис.5.4
Динамические свойства звена характеризуются постоянной времени Т.
Постоянная времени может быть определена как время, в течение которого
выходная величина достигла бы своего нового установившегося значения, если бы
она изменялась с постоянной скоростью, равной скорости изменения ее в начальный
момент времени.
Коэффициент передачи k определяет свойства звена в установившемся
режиме.
Очевидно, имея в распоряжении частотные либо переходные
характеристики, полученные, например, экспериментально, можно восстановить
передаточную функцию звена.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 26 из 100
ТЕМА 6 Виды соединений звеньев.
Преобразование сложных структурных схем
В теории автоматического управления под структурной схемой понимается
графическое изображение математического описания. То есть для составления
структурной схемы система дробится на элементы, каждый из которых описывается
простейшим математическим выражением (в виде передаточной функции).
Структурные схемы содержат следующие четыре типа элементов: звенья
направленного действия; устройства сравнения, или сумматоры; линии связи; точки
разветвления (узлы).
Звенья направленного действия изображаются прямоугольниками, внутри
которых записываются их передаточные функции.
Между собой звенья соединяются с помощью линий связи. На этих линиях
стрелками указывается направление распространения сигналов. Следует
подчеркнуть, что в направлениях, противоположных указанным стрелками, сигналы
не распространяются. Сами линии связи, также как и сумматоры, считаются
идеальными, то есть никакими параметрами не обладают.
Сумматоры предназначены для суммирования сигналов (с учетом знака
сигнала), как и на функциональных схемах.
Для распределения сигналов по различным направлениям используются
узлы, которые обозначаются точками в местах пересечения линий связи.
Для удобства расчетов бывает необходимо преобразовать исходную
структурную схему системы к какому-либо желаемому виду, чаще всего - к цепи
последовательно соединенных звеньев. В связи с этим рассмотрим основные
правила преобразования структурных схем.
При последовательном соединении n звеньев с передаточными функциями
Wi(p) эквивалентная передаточная функция Wэ(p) определяется их произведением:
При параллельном соединении n звеньев эквивалентная передаточная
функция определяется суммой передаточных функций Wi(p) отдельных звеньев:
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 27 из 100
Для случая обратной связи при выводе эквивалентной передаточной
функции замкнутого участка Wз(p) используем обозначения, приведенные на
рис.6.1.
Схема замкнутого участка системы
Рис.6.1
Обратная связь называется отрицательной, если
x1=xвх-xoc,
как показано на схеме, и положительно, если
x1=xвх+xoc.
В случае отрицательной обратной связи в изображениях по Лапласу с учетом
указанных направлений распространения сигналов запишем:
Xвых(p)=X1(p)W1(p)=[Xвх(p)-Xoc(p)]W(p)=
[Xвх(p)-Xвых(p)Woc(p)]W(p).
Отсюда получаем передаточную функцию
Для положительной обратной связи в знаменателе формулы знак "плюс"
меняется на "минус".
Указанные три вида преобразования структурных схем являются наиболее
часто встречающимися. Для остальных случаев сформулируем основной принцип
преобразования и поясним несколькими примерами. При преобразовании
структурной схемы передача сигнала по выбранному направлению не должна
меняться.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 28 из 100
ТЕМА 7 Случайные процессы и их характеристики(корреляционная функция,
спектральная плотность мощности). Использование корреляционной функции
и спектральной плотности для анализа систем
При изучении основ теории автоматического управления ранее
предполагалось, что задающие и возмущающие воздействия представляют собой
известные функции времени. Во многих практических случаях необходимо
исследовать качество работы САУ, когда указанные выше воздействия являются
случайными функциями, т.е. когда понятие о переходном процессе теряет смысл.
Это направление ТАУ основывается на методах теории случайных функций
и математической статистики.
Функция, которая при каждом данном значении независимой переменной
является случайной величиной, называется случайной функцией. Cлучайные
функции, для которых независимой переменной является время, часто называют
стохастическими процессами.
Основными характеристиками
математическое ожидание M, дисперсия
случайной функции (СФ) являются
D и корреляционная функция K.
Математическое ожидание определяется выражением
M x(t ) mx (t ) x(t ) f (x,t )dx.
(7.1)
Дисперсия
D x(t ) M x(t ) mx (t )
2
2
x(t ) mx (t ) f (x,t )dx.
(7.2)
Физический смысл понятия корреляционной функции заключается в
определении вероятности того, что в момент времени t 2 случайная функция
примет значение x , если в момент t t она получила значение x .
2
1
2
1
Kx (t1,t2 ) M x(t1) mx (t1) x(t2 ) mx (t2 )
где x x(t ), а
1
1
x(t1) mx (t 1) x(t2 ) mx (t2 ) f (x1, x2,t1,t2 )dx1dx2,
x2 x(t2 ).
(7.3)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 29 из 100
В приведенных выражениях:
f (x,t ) одномерный дифференциальный закон распределения,
f (x , x ,t ,t ) двумерный дифференциальный закон распределения.
1
2 1 2
В теории СФ математическое ожидание называют начальным моментом
первого порядка, дисперсию-центральным моментом второго порядка, а
корреляционную функцию - смешанным центральным моментом второго порядка.
Раздел теории СФ, оперирующий только с моментами первых двух порядков, носит
название корреляционной теории случайных функций.
Наиболее важным свойством СФ, определяющим возможность применения
особых методов исследования, является зависимость или независимость свойств ее
от начала отсчета времени. В соответствии с этим различают стационарные и
нестационарные случайные функции. Для стационарных СФ все многомерные
законы распределения зависят от взаимного расположения моментов времени
t ,t ,...,t , но не от самих значений этих величин (стационарность в узком смысле).
1 2
n
Если этому условию удовлетворяют только моменты первых двух порядков то СФ
называется стационарной в широком смысле. Процессы преобразования именно
стационарных в широком смысле СФ системами автоматического управления мы и
будем рассматривать, называя в дальнейшем эти СФ просто стационарными.
По определению стационарной СФ ее математическое ожидание и дисперсия
не зависят от времени, а корреляционная функция является функцией только
промежутка времени t t , а не самих моментов отсчета времени.
2
1
mx const;
Dx const;
x(t ) mx x(t mx f (x1, x2,dx1dx2.
Основные свойства корреляционной функции:
1. lim K ( K () 0.
x
x
2. K
x (0) Dx .
3. K
x (0) K x (
Kx ( M x(t ) mx x(t mx
не возрастающая функция.
4. K ( K ( четная функция.
x
x
(7.4)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 30 из 100
Важной характеристикой стационарной СФ является ее спектральная
плотность S , которая связана с корреляционной функцией преобразованием Фурье.
S x ( Kx (e j d
(7.5)
Kx (
j
d
S x (e
(7.6)
Учитывая свойство 2, получим
1
Dx
S x (d
2
(7.7)
Стационарный случайный процесс обладает эргодическим свойством. Это
означает, что все его статистические характеристики могут быть определены по
одной реализации достаточно большой длительности, либо по ансамблю
относительно коротких реализаций.
В практических приложениях широкое распостранение
стационарный случайный процесс типа “белый шум”,для которого
Kx ( N
где N const,
получил
(7.8)
дельта-функция.
S x ( Ne j d N .
(7.9)
Важное прикладное значение такого сигнала состоит в том, что анализ
систем относительно случайных сигналов произвольной формы с помощью
специальных формирующих фильтров можно заменить анализом относительно
белого шума, что значительно упрощает решение задачи.
До сих пор мы рассматривали одну случайную функцию. Рассмотрим теперь
в рамках корреляционной теории систему двух стационарных случайных функций
X и Y. Так как первый и второй моменты каждой СФ в отдельности
представляют собой уже изученные математические ожидания и корреляционные
функции, то остается рассмотреть второй смешанный момент ординат различных
СФ, взятых в различные моменты времени- так называемую взаимную
корреляционную функцию.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 31 из 100
Kxy (t1,t2 ) M x(t1) mx y(t2 ) my
Eсли взаимная корреляционная функция зависит только от промежутка
времени t t , а не от самих моментов времени, то говорят, что указанные СФ
2
1
стационарно связаны и их взаимную корреляционную функцию можно записать в
следующем виде
Kxy (
x(t ) mx y(t my f (x, y,dxdy.
(7.10)
Для взаимной корреляционной функции справедливо равенство
K xy ( K yx (
(7.11)
Остальные свойства взаимной корреляционной функции аналогичны
свойствам обычной, как часто говорят автокорреляционной функции. Если к
взаимной корреляционной функции применить преобразование Фурье, то получим
взаимную спектральную плотность.
Поступает случайный стационарный сигнал g(t ), имеющий
корреляционную функцию K ( и спектральную плотность S ( (рисунок 7.1).
g
g
G(s)
Ф(s)
s)
X (s)
Рис.7.1. САУ при случайном воздействии на входе
Известно, что выходной сигнал определяется выражением
x(t ) g (t )k ()d
-
(7.12)
Тогда математическое ожидание сигнала на выходе будет
mx M x(t )
M
g(t k (d mg k (d
Так как функция веса является оригиналом передаточной функции, то в
соответствии с теоремой о конечном значении оригинала получим
1
mx mg lim s s) mg
s0 s
(7.13)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 32 из 100
g(t
Умножим обе части выражения (7.12) на
x(t )g(t g(t g(t k (d
Применив к этому выражению операцию математического ожидания,
получим
K xg (
K g ( k (d
(7.14)
Умножив обе части (7.12) на x(t и применив снова операцию
математического ожидания, можно записать
M x(t x(t )
K x (
M
g(t x(t k (d
или
K xg ( k (d
(7.15)
Применив к выражению (7.14) преобразование Фурье, получим
Kg ( k (de
Kg ( k (de e e
S xg (
j
d
k e
j
d
j j j
d
Kg ( e j d
Отсюда
S xg ( jS g (
(7.16)
С помощью преобразования Фурье, после аналогичных преобразований, из
выражения (7.15) получим
S x ( jS xg (
Подставим (7.16) в (7.17) и будем иметь
(7.17)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
2
S x j S g (
Страница 33 из 100
(7.18)
Спектральная плотность сигнала на выходе линейной динамической
системы равна спектральной плотности входного сигнала, умноженной на квадрат
амплитудно-фазовой частотной характеристики системы.
Зная спектральную плотность, по выше приведенным формулам можно
определить корреляционную функцию и дисперсию выходного сигнала.
ТЕМА 8 Устойчивость линейных систем
Система называется устойчивой, если:
1) после снятия воздействия по окончании переходного процесса система
возвращается в исходное равновесное состояние;
2) после изменения воздействия на постоянную величину по окончании
переходного процесса система приходит в новое равновестное состояние.
Определим условия устойчивости.
Выходная и входная величины в системе связаны с помощью
дифференциального уравнения. Решение этого дифференциального уравнения при
заданном значении входной величины представляет собой закон изменения
выходной величины во времени. Но это решение состоит из двух составляющих:
x(t)=xв(t)+xсв(t),
где xв(t)- вынужденная составляющая, однозначно связанная с изменением
входной величины. Она определяется как частное решение неоднородного
дифференциального уравнения с правой частью;
xсв(t)- свободная составляющая, изменяющаяся во времени в течение
переходного процесса.
Именно свободная составляющая и определяет переходной процесс в
системе. Определяется она общим решением однородного дифференциального
уравнения
в виде суммы составляющих
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 34 из 100
где Ai- постоянные интегрирования, определяющиеся начальными условиями;
Pi- корни характеристического уравнения.
Характеристическое уравнение составляется на основании исходного
дифференциального уравнения:
anpn+an-1pn-1+...+a1p+a0=0
В общем случае корни являются комплексными. При этом они образуют
пары сопряженных корней:
где
может быть положительной или отрицательной величиной.
При этом, если
, эта составляющая будет затухать. Наоборот, при
получатся расходящиеся колебания.
Отсюда следует, что общим условием затухания всех составляющих, а
значит, и всего переходного процесса в целом является отрицательность
действительных частей всех корней характеристического уравнения системы.
Если хотя бы один корень имеет положительную действительную часть, он
даст расходящуюся составляющую переходного процесса и система будет
неустойчивой.
Изображая корни характеристического уравнения системы точками на
комплексной плоскости, как показано на рис.8.1, условие устойчивости можно
сформулировать еще так: условием устойчивости САУ является расположение всех
корней характеристического уравнения в левой комплексной полуплоскости.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 35 из 100
Рис.8.1
Мнимая ось плоскости корней служит границей устойчивости. При этом
можно выделить три случая выхода САУ на границу устойчивости, которые
характеризуются соответственно:
1) нулевым корнем p1=0;
2) парой чисто мнимых корней
3) бесконечно удаленным корнем
Бесконечность на комплексной плоскости рассматривается как бесконечно
удаленная точка, противоположная нулевой. Поэтому она тоже является границей
между правой и левой полуплоскостями.
Вычисление корней весьма просто лишь для характеристического уравнения
первой и второй степени. Но ведь для определения устойчивости не нужно знать
абсолютное значение корней, необходимо знать лишь, в какой полуплоскости они
находятся. Поэтому важное значение приобретают правила, позволяющие
определять устойчивость системы без вычисления корней. Эти правила называют
критериями устойчивости.
ТЕМА 9 Критерии устойчивости линейных систем
К основным критериям устойчивости относятся алгебраический критерий
Гурвица и частотные критерии Михайлова и Найквиста.
По критерию Гурвица условия устойчивости сводятся к выполнению ряда
неравенств,
связывающих
коэффициенты
уравнения
системы.
Пусть
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 36 из 100
характеристический полином САУ будет (характеристический полином определяет
левую часть уравнения САУ, т.е. знаменатель передаточной функции):
A(p)=anpn+an-1pn-1+...+a1p+a0
Пологая an>0(если anотрицательно, то это условие можно выполнить, умножив
весь полином на минус единицу), составляется из коэффициентов A(p)определитель
Гурвица:
В первой строке пишутся коэффициенты с условно нечетными индексами
(т.е. коэффициенты с индексами n минус нечетное число, где n - порядок
характеристического полинома), во втором - с условно четными (т.е. n минус четное
число). Концы строк заполняются нулями так, чтобы матрица имела n столбцов.
Третья и четвертая строки получаются сдвигом первых двух на одно место вправо и
т.д. ( всего строк - n).
Условия устойчивости заключаются в требовании положительности
определителя Гурвица и всех его диагональных миноров. Из этого правила можно
вывести более удобное для практического применения: САУ устойчива, если
положительны все коэффициенты характеристического полинома и предпоследний
диагональный минор определителя Гурвица (справедливо для систем не выше
четвертого порядка).
Выведем выражение для расчета предпоследнего диагонального минора
систем третьего и четвертого порядка.
Для систем третьего порядка (n=3):
A(p)=a3p3+a2p2+a1p+a0;
(9.1)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 37 из 100
Для систем четвертого порядка (n=4):
A(p)= a4p4+a3p3+a2p2+a1p+a0;
(9.2)
Критерий Рауса требует несколько меньшего объема вычислений, чем
критерий Гурвица и более удобен для программирования на ЭВМ. Для суждения об
устойчивости системы по этому критерию необходимо составить таблицу Рауса.
Был введен в 1877 английским математиком Раусом в виде некоторого
правила (алгоритма).
В первой строке таблицы Рауса записываем в порядке возрастания индексов
коэффициенты характеристического уравнения, имеющие четный индекс, т.е а0, а2,
а4 и тд.
Во второй строке – коэффициенты с нечетным индексом а1, а3, а5 и тд.
Любой из остальных коэффициентов определяется как:
Ск,i=Ck+1,i-2 – Ri*Ck+1,i-1
Ri= C1,i-2/ C1,i-1
, где к- номер столбца, i – номер строки.
Число строк таблиц Рауса равно степени характеристического уравнения плюс
единица.
Таблица
Рауса
заполняется
следующим
характеристического уравнения третьей степени):
Коэффициент,
Ri
-
Строка ,
i
1
2
образом
(пример
Столбец
1
а0
а1
2
а2
а3
для
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
R3
3
R4
4
С13= C21-R3*С22,
R3=C11/C12
С14=C22-R4*C23,
R4=C12/C13
Страница 38 из 100
С23=C31-R3*C32
С24=C32-R4*C33
Для того, чтобы корни характеристического уравнения лежали в левой
полуплоскости и система была устойчива, необходимо и достаточно, чтобы все
элементы первого столбца таблицы Рауса были строго положительны.
Критерий устойчивости Михайлова основан также на рассмотрении
характеристического полинома.
Подставим в этот полином вместо р мнимую переменную
комплексную функцию
. Получим
, где
- действительная часть, полученная из членов А(р), содержащих четные
степени р;
- мнимая часть, полученная из членов А(р) с нечетными степенями р.
Изобразим А(
рис.9.1.
) в виде графика в комплексной плоскости, как показано на
Рис.9.1
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 39 из 100
Этот график принято называть годографом Михайлова. Каждому значению
соответствуют определенные значения Х( ) и Y( ) и определенная точка на
плоскости. При
=0 функция А(
)=а0, т.е. годограф начинается на
действительной оси. При
функция А(
) тоже неограниченно возрастает.
Сформулируем критерий Михайлова: система устойчива, если годограф
А(
), начинаясь на действительной положительной полуоси, огибает против
часовой стрелки начало координат, проходя последовательно n квадрантов, где n порядок системы.
Представленный выше годограф (см. рис.9.1) соответствует устойчивой САУ
четвертого порядка.
Годограф Михайлова можно строить по точкам, изменяя частоту от нуля до
бесконечности с определенным шагом и вычисляя каждый раз значение А( ).
Можно поступить по другому: найти точки пересечения годографа с осями и
соединить их плавной линией. Для этого, определив из уравнения Х( )=0 значения
частот, соответствующих точкам пересечения годографа А( ) с мнимой осью,
подставляют их в выражение Y( ). В результате получают соответствующие
координаты. Аналогично находят точки пресечения А( ) с действительной осью,
приравнивая нулю мнимую часть Y( ).
Собственно, после того, как найдены значения , при которых годограф
А( ) пересекает оси координат, то есть нули Х( ) и Y( ), нет необходимости
строить сам годограф.
Из формулировки критерия следует, что устойчивость имеет место, если
нули Х( ) и Y( ) чередуются с ростом , начиная с =0, когда Y( )=0, а Х( )>0.
Выше отмечалось, что условием нахождения САУ на границе устойчивости
является попадание корня характеристического уравнения на мнимую ось плоскости
корней. Но если характеристическое уравнение А(р)=0 имеет корень
удовлетворяется равенство
откуда получаем
, то
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 40 из 100
Графически это означает попадание одной точки годографа Михайлова в
начало координат.
Таким образом. условием нахождения САУ на границе устойчивости
является прохождение годографа Михайлова через начало координат (при какой-то
частоте
. Физический смысл величины
границе устойчивости).
- частота колебаний системы на
Но для нахождения на границе устойчивости должен быть пропущен лишь
один квадрант. Другими словами, очертание кривой Михайлова на границе
устойчивости должно быть таким, чтобы малой деформацией ее в начале координат
можно было удовлетворить критерию Михайлова. Так, график на рис.9.2, а
соответствует нахождению САУ на границе устойчивости, а график на рис.9.2, б неустойчивости.
Рис.9.2
Критерий устойчивости Найквиста предназначен для анализа
устойчивости замкнутых систем.
Для случая, если разомкнутая цепь устойчива, условия устойчивости
замкнутой САУ сводится к требованию, чтобы амплитудно-фазовая частотная
характеристика (АФЧХ) разомкнутой цепи не охватывала точку (- 1, j0).
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Если АФЧХ разомкнутой цепи Wрц(
можно записать
Страница 41 из 100
) проходит через точку (- 1, j0) , то
Но это возможно в том случае, если
то есть годограф Михайлова замкнутой САУ проходит через начало
координат.
Таким образом, если АФЧХ разомкнутой цепи проходит через точку (- 1, j0),
то замкнутая САУ будет находится на границе устойчивости.
На рис.9.3 приведены две АФЧХ. Кривая 1 соответствует устойчивой САУ,
кривая 2 - нахождению САУ на границе устойчивости.
Если, например, уменьшить коэффициент передачи в неустойчивой САУ, то
ее АФЧХ будет сжиматься к началу координат, в результате чего система станет,
наконец, устойчивой. Аналогично этому происходит и обратное.
Для САУ, имеющих неустойчивую разомкнутую цепь, условия устойчивости
рассматривать не будем.
Рис.9.3
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 42 из 100
В соответствии с критерием Найквиста об устойчивости можно судить не
только по АФЧХ, но и совместно по амплитудной и фазовой частотным
характеристикам
разомкнутой
цепи.
Обычно
при
этом
пользуются
логарифмическими характеристиками, что представляет большое удобство в силу
простоты их построения. Но если ЛАЧХ используется асимптотическая, то расчеты
будут достаточно грубыми.
Не охватывание АФЧХ точки (- 1, j0) имеет место, если при частоте, на
которой A( )=1, абсолютное значение фазы меньше .
Но значение А=1 соответствует G=20lgA=0.
Поэтому для устойчивости замкнутой САУ необходимо, чтобы ЛАЧХ
разомкнутой цепи пересекла ось абсцисс раньше, чем фаза, спадая, окончательно
перейдет за значение - .
На рис.9.4 приведены ЛАЧХ и ЛФЧХ, соответствующие устойчивости
некоторой САУ.
Рис.9.4
Критерий Найквиста позволяет оценить устойчивость САУ, содержащих
звенья с запаздыванием.
Пусть звено с запаздыванием с передаточной функцией
(при единичном
коэффициенте передачи) включено последовательно с системой без запаздывания с
передаточной функцией W0(p).
Результирующие передаточная и комплексная частотная функции
разомкнутой цепи будут:
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 43 из 100
где
С учетом последнего
Видно, что звено с запаздыванием лишь вносит дополнительный сдвиг. При
этом изменяется АФЧХ, т.е. меняются условия устойчивости (характеристика
"закручивается" по часовой стрелке). При некотором САУ станет неустойчивой.
По АФЧХ системы без запаздывания можно определить критическое
(предельное) значение запаздывания
, что поясняется построением на рис.9.5.
Рис.9.5
Определяется точка, для которой
этой точке -
, а фаза -
Частота, соответствующая
.
При введении запаздывания условие совпадения этой точки с точкой (- 1, j0)
запишется
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 44 из 100
откуда
Физический смысл критерия Найквиста заключается в том, что при увеличении
частоты входного воздействия сигнал, проходящий по цепи обратной связи,
оказывается в противофазе с входным. А это равносильно замене
отрицательной обратной связи на положительную. Если же при этой частоте
разомкнутый контур обладает усилением (т.е. k>1), то замкнутая САУ становится
неустойчивой (любое увеличение сигнала на выходе приводит к увеличению
сигнала на входе по цепи обратной связи, что вызывает дальнейший рост выходного
сигнала и т.д.).
Для аналитических расчетов с помощью критерия Найквиста условия
нахождения системы на границе устойчивости можно записать в двух формах:
а) используя вещественную и мнимую частотные функции разомкнутой цепи
(9.3)
б) используя амплитудную и фазовую частотные характеристики разомкнутой цепи
(9.4)
Аналитические расчеты существенно упрощаются в частном случае, когда в
числителе Wр.ц.(p) присутствует только коэффициент передачи k, как, например, в
структуре на рис.3.3. При этом комплексную частотную функцию можно записать
УМКД 042-14-02-03.1.20.95/03-2008
где
и
Редакция №1
Страница 45 из 100
- соответственно действительная и мнимая части знаменателя
.
Но
в том случае, если
, значит
Тогда условия нахождения САУ на границе устойчивости (3.8) преобразуются к
виду
или
(9.5)
ТЕМА 10 Переходные процессы. Точные методы переходных процессов.
Приближенное построение переходных процессов по частотным и временным
характеристикам
Изображение переходной функции имеет вид
1
H (s) Ф(s) .
s
Оригинал переходной функции может быть получен использованием точных
и приближенных методов. Будем рассматривать только точные методы, связанные с
применением обратного преобразования Лапласа.
Построение переходной функции при использовании таблиц преобразования
Лапласа начинается с представления ее изображения в виде произведения
передаточных функций типовых звеньев.
H ( s)
B(s) n Bi (s)
.
sD(s) i 1 sD i (s)
Затем это выражение преобразуется в сумму передаточных функций с
неопределенными коэффициентами
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
H (s)
Страница 46 из 100
C s Dk
l
A m Bi
2k
.
s i 1 s i k 1 s bk s ck
(10.1)
В этом выражении A, Bi, Ck, Dk – неопределенные коэффициенты, i –
вещественные корни уравнения D(s)=0, а выражения s2+bks+ck – соответствуют
комплексно – сопряженным корням характеристического уравнения. Выражение
(4.4) необходимо привести к общему знаменателю и числитель полученного
выражения приравнять числителю изображения исходной переходной функции B(s).
Приравнивая члены при одинаковых степенях опрератора s в левой и правой частях,
получим систему уравнений относительно неопределенных коэффициентов.
Вычислив значения этих коэффициентов, обратимся к таблицам преобразования
Лапласа и определим оригиналы слагаемых формулы (4.4). Отметим, что
оригиналы, соответствующие первым двум членам суммы (4.4), определяются
непосредственно из таблиц, определение оригиналов для третьего члена этой
суммы могут потребоваться некоторые преобразования.
Оригинал переходной функции может быть получен использованием формулы
обратного преобразования Лапласа, так называемой формулы разложения. В общем
случае формула разложения имеет вид
h(t )
1
n
n
lim (s si ) i
i 1 (ni 1)! s si
B(si ) si t
e
si D(si )
(ni 1)
,
(10.2)
где si – корни уравнения sD(s)=0, ni- кратность корней. В случае только простых
корней, когда среди них имются m вещественных корней и l пар комплексно –
сопряженных корней, формула разложения принимает вид
h(t )
l
t
B(0) m B(si )
2 Ak e k cos(k t k ).
D(0) i 1 si D(si ) k 1
(10.3)
В этом выражении k и k – вещественная и мнимая части комплексно
сопряженных корней, а
Амплитуда фаза колебательных составляющих
d
D(s)
ds
D(s).
определяются следующим образом:
B(sk )
U k jVk ,
s k D (sk )
Ak U k2 Vk2 ; k arctg
Vk
.
Uk
При вычислениях по этим формулам, в первую подставляется только один из
пары комплексно – сопряженных корней. При вычислении фазового сдвига
необходимо учитывать квадрант, в котором находиться вектор Akejk.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 47 из 100
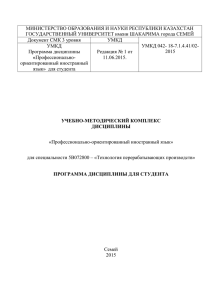
ТЕМА 11 Качество непрерывных стационарных систем управления
Устойчивость - это необходимое, но недостаточное условие эффективной
работы системы.
Комплекс требований, определяющих поведение системы в установившихся и
переходных процессах отработки заданного воздействия, определяется понятием
«качество процесса управления» или качество системы.
На этапе разработки системы управления рассматривают процессы
управления в устойчивых системах при воздействии особо "тяжелых" для них
сигналов, заданных в виде определенных или случайных функций времени.
Качество работы системы проверяется по ее реакции на:
1)
2)
3)
4)
дельта функцию (t ) ;
единичную функцию 1(t ) ;
гармонический сигнал A sin H t ;
случайные воздействия с заданными вероятностными характеристиками.
Качество отработки типовых сигналов оценивают либо непосредственно по
выходному сигналу y (t ) , либо путем сравнения этого сигнала y (t ) с реакцией
некоторой эталонной системы (рассогласование e (t ) на рис.2.46), либо по ошибке
воспроизведения командного сигнала
v (t ) v (t ) y (t ) .
v (t )
Управляемая
система
Эталонная
система
y (t )
e (t )
y e (t )
Рис. 11.1. Сравнение управляемой
системы с эталонной
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 48 из 100
На рис. 11.1 представлена реакция некоторой следящей системы на линейно
возрастающий командный сигнал
v (t ) (0.5 0.025 t )1(t ) ,
на рис. 11.2 – реакция на единичную функцию.
Tk / 2
vуст
vm
tн
tм
v (t )
2
vуст
tр
Рис. 11.2. Иллюстрация к характеристикам качества системы
(реакция на линейно изменяющийся сигнал)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 49 из 100
T
k
E
vуст
2
t
t
н
м
tр
Рис. 11.3. Иллюстрация к определению показателей качества
(реакция на единичную функцию)
С помощью этих рисунков удобно проиллюстрировать основные показатели
качества, используемуе при анализе систем управления.
1. Установившаяся ошибка:
уст ( ) lim(v (t ) y (t )) .
t
(11.1)
2. Время регулирования t р - минимальное время, в течение которого переходный
процесс перестает выходить за пределы заданной «трубки». Определяется из
условия
(t ) уст
при t t p ,
где - заранее заданное значение, определяемое требованиями к точности
системы (обычно 2-5% от значения командного или выходного сигнала в
установившемся режиме).
(11.2)
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 50 из 100
3. Максимальное перерегулирование - наибольший выброс управляемого
процесса относительно установившегося значения по отношению к разности
и (0) .
мах уст
100%
уст (0)
уст
(11.3)
Обычно требуют 30 40% .
4. Время нарастания: t н - время первого входа процесса в трубку.
5. Время максимального перерегулирования: t m .
6. Число перерегулирований N в интервале: 0 t t p число выбросов, для которых
уст m .
7. Частота или период Tk колебательной составляющей переходного процесса.
ТЕМА 12 Системы с переменными параметрами
Линейной системой с переменными (var) параметрами называется такая,
движение которой описывается ДУ с переменными во времени коэффициентами:
a0 ( t )
dn
dt
n
y .. a n 1( t)
d
y a n( t) y
dt
b0 ( t)
=
dm
dt
m
f .. b m 1( t)
d
f b m f
dt
где воздействие f может быть и задающим - g(t).
Те. ПФ подобной системы параметрическая, например:
Y( s t)
W( s t) = X( s t)
K( t)
= 1 T1 s 1 T2( t) s
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 51 из 100
где: K(t), T2(t) - зависящие от времени функции.
Очевидно, что реакции САР с var-параметрами на стандартные возмущения
1(t) и (t) будут зависеть от момента времени
поступления сигналов. Различают:
Нормальную весовую функцию w(t, ) при =const.
Сопряженную весовую функцию w(t-, ) при t=const.
Реверс-смещение сопряженной весовой функции w(, t-) при
t=const.
Заметим, что в системах с постоянными параметрами рельеф функций веса
цилиндрический и нормальная функция веса совпадает с сопряженной (с реверссмещением).
Если на систему, со свойственной ей функцией веса w(t-, ), действует
входной сигнал f(t), то элементарная реакция на выходе системы в произвольный
момент времени t= будет:
dy = w(t-, ) f() d .
Полный сигнал определяется как суперпозиция элементарных реакций:
y = ot w(t-, ) f() d .
А если использовать реверс смещение = t- (t=const):
y = ot w(, t-) f(t-) d ,
то получим интеграл свертки для квазистационарных систем.
Найти функцию веса для систем первого и второго порядков можно
аналитически. Для систем высших порядков существуют численные методы.
ПФ системы с переменными параметрами можно определить либо по
функциям веса:
W(s, t) = -Ґt т w(t-J, J) e-(t-J)s dJ = o+Ґ т w(q, t-q) e-qs dq ,
либо по переходной функции h(t-J, J):
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 52 из 100
W(s, t) = s -Ґt т h(t-J, J) e-(t-J)s dJ = s o+Ґ т h(q, t-q) e-qs dq ,
но этот подход нерационален, т.к. требует знания типовых реакций системы
h и w.
Более удобно находить ПФ W(s, t) из исходного ДУ с var-параметрами:
A(s, t) W(s, t) + N{W(s, t)} = B(s, t) ,
где:
A(s,
t)
= a0(t)sn+...+an(t) ; B(s,
N{W(s, t)} =[ dA/ds dW/dt + ... + 1/n! dnA/dsn dnW/dtn ] .
t)
= b0(t)sm+...+bm(t) ;
Решение ДУ, т.е. ПФ W(s, t) будем искать в виде ряда:
W(s, t) = W0(s, t) + W1(s, t) + ...
где: W0(s, t) = B(s, t) / A(s, t); Wk(s, t) = N{Wk-1(s, t)} / A(s, t) .
Поскольку в квазистационарных САР параметры меняются много медленней
свободного движения системы, параметрическую САР считают устойчивой, если
при всех "замороженных" комбинациях параметров она остается устойчивой.
Т.е. в параметрической ПФ W(s, t) фиксируют время t в диапазоне 0 < t < T и
многократно исследуют на устойчивость, используя любой из критериев.
Максимальное внимание надо уделить временным интервалам, где параметры
меняются быстро или происходит смена знака. Особенно эффективно
использование корневого годографа, зависимого от var-параметра, для оценки
тенденций в системе.
При оценке качества регулирования следует учитывать, что коэффициенты
ошибок получаются зависимыми от времени: Ck = [dkFx(s, t) / dsk], при s=0.
Изменение параметров можно рассматривать как возмущающее воздействие
на систему. Соответственно составляющие ошибки от var-параметра не будут
сводиться к нулю, за исключением случая, когда содержащее var-параметр звено
установлено в цепи ОС или в прямом канале до интегрирующих элементов.
Поскольку динамика изменения var-параметров в сравнении с динамикой
задающего воздействия g(t) не значительна в случае квазистационарных систем, то
соответствующие составляющие ошибок: по скорости, ускорению, ... - как правило,
меньше.
ТЕМА 13 Системы с запаздыванием
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 53 из 100
Линейной системой с запаздыванием называется такая, которая содержит
в своей структуре хотя бы одно звено, в котором есть неизменное запаздывание во
времени изменения выходной координаты после начала изменения входной.
Рассмотрим апериодическое звено
порядка, которое описывается уравнением:
первого
T dy/dt + y = K x(t) . (13.1)
Уравнение соответствующего звена с запаздыванием будет иметь вид:
T dy/dt + y = K x(t-) .
(13.2)
Оно называется дифференциально-разностным.
Обозначим x*(t) = x(t-), тогда уравнение (13.2) запишется в обыкновенном
виде:
T dy/dt + y = K x*(t) .
(13.3)
Следовательно
его
переходная
характеристика
соответствует
апериодическому звену, но задержана на с, что определено задержкой воздействия
x*(t)
Временная характеристика любого звена с запаздыванием будет такая
же, как у соответствующего обыкновенного звена, но только сдвинута по оси
времени вправо на величину .
Величину запаздывания в звене можно определить экспериментально,
путем снятия временной характеристики.
По ЧХ звена чистого запаздывания наглядно видно, что его коэффициент передачи
во всем частотном диапазоне равен единице. Причем в области низких частот и
задержка в звене пренебрежимо мала (т.е. сдвиг фазы стремится к нулю), поэтому
при исследовании точности систем с запаздыванием допустимо просто исключить
все звенья чистого запаздывания из структурной схемы. Эта операция допустима,
поскольку точность любой системы определяет только НЧ часть ее ЧХ.
ТЕМА 14 Синтез автоматических систем
Направленный расчет, имеющий конечной целью отыскание: 1) рациональной
структуры системы и 2) установление оптимальных величин параметров отдельных
звеньев.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 54 из 100
При множестве возможных решений, должен быть выбран критерий
оптимизации - цена, точность, надежность, быстродействие, затраты энергии ...
При инженерном синтезе ставятся задачи:
1. Достижение требуемой точности.
2. Обеспечение приемлемого характера переходных процессов (задача
демпфирования).
Решение первой задачи заключено в выборе средств повышающих
точность системы (усилительных, изодромных блоков; каналов КУ; не 1ОС), т.е.
фактически вида регулирования.
Решение второй задачи заключено в выборе оптимальных
корректирующих средств.
Процесс синтеза включает в себя следующие операции:
1. Построение располагаемой ЛАЧХ исходной системы Wo, состоящей из
регулируемого объекта без регулятора и без корректирующего устройства.
2. Построение НЧ части желаемой ЛАЧХ на основе предъявленных требований
точности.
3. Определение вида и параметров регулятора K, Ki, ...:
Wрег(s) = WНЧ.ж.(s) / Wo(s);
Lрег() = LНЧ.ж.() - Lo( ) .
4. Уточнение ВЧ части желаемой ЛАЧХ на основе требований к запасу
устойчивости - LНЧ&ВЧ.ж.().
5. Определение вида и параметров последовательного корректирующего
устройства:
WПЗ кор = WНЧ&ВЧ.ж. / [Wрег Wo];
LПЗ кор = LНЧ&ВЧ.ж. - Lрег - Lo .
6. Техническая реализация корректирующих устройств. В случае необходимости
- перерасчет на эквивалентные параллельное звено или ОС.
7. Поверочный расчет и построение переходного процесса.
Корневой метод синтеза позволяет получить приемлемые динамические
качества, при заданной структуре САР и заданном значении коэффициента усиления
(последний член характеристического уравнения).
Пусть имеется ХУ:
sn+A1sn-1+...+An = 0.
При
(14.1)
Сумма модулей вещественных частей всех корней равна коэффициенту A1.
заданной его величине быстродействие будет максимальным, если
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 55 из 100
вещественные части корней равны. Но это не достижимо - система будет не
устойчивой. Например, для САР состоящей из 3-х апериодических звеньев
выполнение условия эквивалентно равенству постоянных времени...
Реально всегда можно выделить 2 или 3 корня, с наименьшей по модулю
вещественной частью, которые определяют вид переходного процесса. Положим их
2 и они комплексные. Перепишем ХУ:
(sn-2+C1sn-3+...+Cn-3) (s2+B1s+B2) = 0.
(14.2)
Достаточно рассматривать только 2-ой сомножитель, поскольку им
определен вид переходного процесса:
B2 определяется значением K и должен иметь возможно большее
значение.
B1 определяется суммой 2-х низкочастотных постоянных времени
и связан с затуханием , следовательно должен быть выбран исходя из 2-х
противоречивых требований быстродействия и устойчивости.
Оптимальное соотношение между B1 и B2 может быть получено из условия
затухания за один период , выбор которого определяет отношение вещественной
части корней к мнимой:
= = 2 / ln(1/(1-1/)), где: = - B1/2; = (B2-B12/4)1/2.
Если принять, что вид переходного процесса определяют три корня, то
следует воспользоваться уравнением 3-ей степени:
(...) (s3+B1s2+B2s1+B3) = 0,
(14.3)
которое нужно представить в виде:
(s+C11) (s2+B11s+B22) = 0.
Вещественные части корней будут равны 1 = 2,3 = - B1/3. Требования к B11
и B22 уже сформулированы, а связи с (3) определены равенствами:
B1=C11+B11, B2=B22+B11C11, B3=C11B22.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 56 из 100
Выбор порядка уравнения для описания основной
переходного процесса зависит от структурной схемы САР.
составляющей
ТЕМА 15 Коррекция обыкновенных непрерывных стационарных систем
Задача синтеза и проектирования САУ заключается в таком выборе ее
структурной схемы, параметров, характеристик и способа их технической
реализации, при которых требуемые динамические и эксплуатационные свойства
системы обеспечиваются простыми и надежными техническими средствами.
С точки зрения ТАУ целью синтеза является формирование закона управления,
при котором достигаются заданные показатели устойчивости и качества системы.
Закон управления – это зависимость между отклонением регулирующего
органа и сигналом ошибки. Объект управления и исполнительные органы
образуют, так называемую, неизменяемую часть системы, параметры которой
являются исходной информацией при синтезе. Передаточную функцию
неизменяемой части обозначим как W0(s). Конечная цель синтеза заключается в
определении параметров специальных корректирующих устройств, которые,
будучи добавлены к неизменяемой части системы, придадут ей необходимые
свойства.
Существуют три способа коррекции САУ.
1). Последовательная коррекция: W(s)= Wпос(s)W0(s).
Wпос(s) – передаточная функция последовательного корректирующего устройства.
2). Параллельная коррекция: W(s)=Wпар(s) + W0(s).
Wпар(s) – передаточная функция параллельного корректирующего устройства.
3). Коррекция в виде обратных связей:
W(s)
.
W 0 ( s)
1 Woc (s)W0 (s)
Woc(s) – передаточная функция звена корректирующей обратной связи.
Приравнивая полученные передаточные функции, можно выразить передаточную
функцию любого вида коррекции через другие.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 57 из 100
Наиболее просто коррекция САУ осуществляется изменением коэффициента
передачи прямой цепи. Пусть система является статической и ее передаточная
функция в разомкнутом состоянии имеет вид
W ( s)
kB(s)
.
A(s)
Для передаточной функции замкнутой системы по ошибке получим
1
A(s)
Ф (s)
.
1W (s) A(s) kB(s)
Будем считать, что все полиномы передаточной функции приведенные, т.е. bm=1,
an=1. Если на вход системы подано ступенчатое воздействие с амплитудой N, то
для статической ошибки можно записать
cm lim sФ (s)
s 0
N
1
N.
s 1 k
(15.1)
Пусть теперь система имеет астатизм первого порядка:
W ( s)
kB(s)
sA(s)
; Ф (s)
.
sA(s)
sA(s) kB(s)
Подадим на вход системы воздействие вида
g (t ) g 0 gt
где
g 0 g
2,
s s
g0 const и g const. Для статической ошибки получим
g
g
g
cm lim sФ (s)( 0 2 ) .
s s
k
s 0
(15.2)
Из этих рассуждений следует, что для повышения точности системы в
установившемся режиме необходимо увеличивать коэффициент передачи
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 58 из 100
прямой цепи. При этом возрастает и быстродействие системы. Увеличение
коэффициента передачи приближает систему к границе устойчивости и следует
помнить, что при выборе коэффициента передачи прямой цепи только по
условиям заданной точности можно получить неустойчивую систему и
потребуются дополнительные меры по ее стабилизации.
Корректирующие устройства различных типов вводят в закон управления
производные, интегралы и их комбинации от сигнала ошибки и промежуточных
величин. Рассмотрим физический смысл введения производной и интеграла.
Структурную схему системы представим в виде
W0(s)
Wk(s)
Рис. 14.1. Коррекция САУ.
На этой схеме Wk(s) – передаточная функция корректирующего устройства.
Допустим, что Wk (s) k k s, т.е. в закон управления вводится производная от
сигнала ошибки. Тогда для АФЧХ системы можно записать
W ( j jkk W0 A0 (e j kk A0 e j( ).
Изменение АФЧХ скорректированной системы, по сравнению с исходной
показано на рис. 15.2. Из рисунка следует, что введение производной сдвигает
АФЧХ в положительном направлении и удаляет ее от критической точки.
Введение производной в закон регулирования всегда преследует цель повышения
запасов устойчивости и снижения колебательности.
Пусть теперь
Wk (s)
kk
,
s
т.е. в закон управления вводится интеграл. В этом случае
УМКД 042-14-02-03.1.20.95/03-2008
W ( j
Редакция №1
Страница 59 из 100
kk
k
)W0 ( j A0 e j k A0 e j ( )
j
Из этого выражения следует, что при введении интеграла увеличивается
коэффициент передачи на низких частотах и именно это повышает точность
системы. Основная цель введения интеграла в закон управления – это повышение
точности системы в установившемся режиме.
V()
V()
W(j)
Wk(j)W0(j)
-1
U()
kkA0()ej(j()+90)
-1
U( )
A0()ej()
W(j)
A0()ej()
Рис.15.2. Введение производной
в закон управления
Рис. 15.3. Введение интеграла
в закон управления
Из рис. 15.3. следует, что при введении интеграла АФЧХ системы смещается в
положительном направлении и приближается к критической точке. При
введении интеграла в закон управления уменьшаются запасы устойчивости
системы.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 60 из 100
3 Практические и лабораторные занятия
3.1 Лабораторные занятия
Лабораторные занятия – одна из форм учебного занятия, направленная на
развитие самостоятельности студентов и приобретение умений и навыков.
Лабораторные занятия должны способствовать углубленному изучению
наиболее сложных вопросов дисциплины и служат основной формой подведения
итогов самостоятельной работы студентов. Именно на этих занятиях студенты
учатся грамотно излагать проблемы и свободно высказывать свои мысли и
суждения, рассматривают ситуации, способствующие развитию профессиональной
компетентности. Всё это помогает приобрести навыки и умения, необходимые
современному специалисту.
Работа №1
ПРИНЦИПЫ ФУНКЦИОНИРОВАНИЯ МОДЕЛИРУЮЩИХ ПАКЕТОВ.
(ОСНОВЫ РАБОТЫ С ПРОГРАММОЙ VISSIM)
Рабочие файлы: [csd_new.scm] [rlc.vsm] [rlc.ca4]
1. Цель работы
Приобретение навыков работы с моделирующими программными пакетам
VisSim и Electronics Workbench. Ознакомление с главными этапами моделирования.
Определение общих методов представления результатов. Выяснение сути задания
параметров моделирования и начальных условий состояния системы.
2. Содержание работы
2.1. Выяснить порядок запуска используемых программных пакетов VisSim
и Electronics Workbench.
2.2. Просмотреть демонстрацию работы программы VisSim (файл
csd_new.scm). Выявить а) назначение программы, б) основные этапы работы с
программой.
2.3. Запустить программу VisSim. Ознакомиться с содержанием меню.
Загрузить файл rlc.vsm с моделью «RLC»-цепи и изучить модель. Записать
уравнение модели. Определить параметры моделируемых элементов и начальные
условия в схеме. Изменить начальные условия и параметры модели по
собственному усмотрению.
2.4. Запустить программу Electronics Workbench. Ознакомиться с
содержанием меню. Составить «RLC»-цепь получить переходный процесс
подобный полученному в пакете VisSim.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 61 из 100
2.5. По вариантам (табл. 1) спроектировать модели источников
периодического сигнала в пакете VisSim. Измерить и при необходимости
компенсировать постоянную составляющую в сигнале. Использовать блок «plot»
для осциллографирования.
Таблица 1
Вариа
Форма сигнала
нт
1
Прямоугольный
(скважность 1:2)
2
Треугольный
3
Линейно нарастающий
4
Нарастающий по
параболе
5
Модуль синусоиды
Частота,
кГц
10
Амплитуда
, ед.
10
20
30
40
20
30
40
50
50
3. Методические указания к моделированию и рекомендации к
содержанию отчета
3.1. Кратко описать принципы функционирования программных пакетов
VisSim и Electronics Workbench.
3.2. Привести распечатки, подтверждающие выполнение всех пунктов
экспериментальной части и текстовые пояснения к ним. Для модели «RLC»-цепи
записать уравнение, подставить в него параметры элементов и начальные условия, а
также полностью охарактеризовать переходный процесс.
3.3. Для измерения постоянной составляющей (см. пп. 2.5) следует составить
блок-схему соответствующую магнитоэлектрическому измерительному механизму,
который реагирует на среднее значение. Главный блок в модели измерительного
преобразователя — интегратор.
3.4. Выводы.
Работа №2.
НАБОР КОММУНИКАЦИОННЫХ СХЕМ В ПРОГРАММНОЙ СРЕДЕ
VISSIM
1. Цель работы: знакомство с принципами построения моделей, блоками и
графическим интерфейсом программы VisSim, а также приобретение навыков
создания и моделирования простейших структур, текстового и графического
оформления диаграмм.
ознакомление с принципами построения моделей в среде VisSim;
знакомство с основными видами блоков;
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 62 из 100
изучение графического интерфейса VisSim;
создание надписей;
составление простейших диаграмм;
2. Содержание работы
Работа рассчитана на одно занятие в компьютерном зале и один час
самостоятельной работы студента. Работа выполняется в компьютерном зале
бригадой из одного - двух или трех студентов, в зависимости от величины группы и
возможностей компьютерного зала.
2.1 Установить
Кириллицу:
View Fonts Кириллица.
2.2 Создать
надпись
"
Привет,
Студент!
Hi,
Student!":
Blocks Annotation Label. Переместить курсор в нужное место рабочего
пространства и щелчком левой кнопки мыши зафиксировать положение блока
надписи. Установить шрифт: правой кнопкой на надписи Font кириллица. По
желанию установить размер и вид шрифта, цвет заднего плана.
Поэкспериментировать со шрифтами и цветами.
2.3 Поместить на рабочий стол генератор синусоиды и осциллограф.
2.4 Blocks Signal Producer sinusoid. Blocks Signal Consumer plot.
2.5 Подключить генератор синусоиды к осциллографу: удерживая левую
кнопку мыши подтянуть соединительную линию от выхода генератора ко входу
осциллографа и отпустить кнопку. Линия создается, если в момент нажатия кнопки
мыши курсор установлен вблизи выхода блока так, что его вид меняется на
вертикальную стрелку. Для разрыва соединения левой кнопкой мыши отцепить
входное соединение, отнести в сторону и бросить.
2.6 Запустить программу на выполнение: кнопка с зеленым треугольником
или Simulate Go.
2.7 Поэкспериментировать с частотой, амплитудой, задержкой (начальной
фазой) синусоиды. Установить частоту 10 рад/сек, амплитуду 2.3, начальную
задержку 0.
2.8 Поменять настройки осциллографа (plot'а). Правой кнопкой мыши
щелкнуть на plot'е, поставить галочку у Greed Lines (сетка координат), подписать
заголовок и подзаголовок (Title and subtitle). Нажать OK.
2.9 Добавить блоки constant и slider (Blocks Signal Producer ...) и
подключить их к осциллографу. Запустить на счет. Поэкспериментировать, изменяя
значения константы, пределы изменения выходного сигнала слайдера и наблюдая за
изменением показаний осциллографа при запуске процесса моделирования.
2.10 Изменить время функционирования модели: Simulate Simulation Setup
Range End. Установить это время равным 4. Нажать ОК. Щелкнуть по кнопке с
зеленым треугольником "Пуск". Убедиться, что длительность развертки
осциллгорафа стало равной 4 сек.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 63 из 100
2.11 Изменить количество точек на экране осциллографа: Simulate
Simulation Setup Step Size. Увеличивая величину шага Step Size при
фиксированном значении Range End можно изменять количество точек на графике.
При этом нужно быть осторожным, чтобы уменьшение количества итераций не
исказило вид кривой. Поэтому величину Step Size следует увеличивать
последовательными приближениями, контролируя неизменность кривой.
2.12 Добавить стрелочный прибор: Blocks Signal Consumer meter.
Подключить к прибору константу constant или изменяемую вручную величину
slider. Запустить на счет. Изменить предел измерений стрелочного прибора, так
чтобы он мог измерить сигнал со слайдера, величиной 32 единицы.
2.13 Сохранение работы.
2.14 Создать
папку
по
адресу:
C:\Мои документы\Учебные группы\Группа ИСЭ-21\Иванов\Lab_Rab_1
2.15 В Vissim’e: File Save As указать путь в папку Lab_Rab_1 дать
диаграмме короткое содержательное имя убедиться, что сохранение произойдет в
нужную папку сохранить.
2.16 По возможности вычислительного зала распечатать диаграмму и
приложить ее к отчету.
2.17 Познакомиться с Help’ом.
2.18 Сделать выводы.
3. Методические указания к моделированию и рекомендации к содержанию
отчета
3.1 Выводы следует формулировать в технической форме, а не в
методической, используя безличную форму изложения. Например, вывод может
быть такой: "Изменяющиеся сигналы целесообразнее исследовать с помощью
осциллографа, а постоянные - с помощью цифрового индикатора". Не следует
констатировать что-то в виде: "Мы познакомились, научились и т.п. ... ".
3.2 Блоки VisSim’а можно условно разделить на три основных категории и
одну дополнительную:
Блоки, имеющие только выход: генераторы.
Блоки, имеющие вход и выход: преобразователи.
Блоки, имеющие только вход: индикаторы.
Блоки без входов и выходов: комментарии и др.
Важным компонентом модели является соединительная линия –
виртуальный аналог физического соединения элементов, передающего воздействия
от одного элемента к другому.
Примечание: Входные и выходные сигналы могут быть как одиночными
функциями времени, так и набором таких функций. В последнем случае сигнал
называется векторным, как и соответствующий вход или выход.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 64 из 100
Блоки, имеющие только выход: генераторы
Примерами таких блоков являются блоки:
step – генератор ступенчатой единичной функции;
ramp – генератор линейно растущего сигнала;
sinusoid – генератор синусоидального сигнала;
const – генератор постоянного сигнала, величина которого не
меняется в процессе работы модели;
slider – генератор постоянного сигнала, величину которого можно
менять в процессе работы модели.
сохранение выполненной работы, печать.
Важнейшие блоки для моделирования линейных систем:
блок transferFunction – передаточная функция, этот блок
позволяет создавать модели как простых, так и очень сложных линейных
систем;
integrator – блок интегратора, осуществляющий интегрирование
входного сигнала по времени и являющийся фундаментальным кирпичиком
любой модели линейной системы;
summingJunction – сумматор двух и более сигналов, его выходной
сигнал равен сумме входных.
gain – усилитель.
Блоки, имеющие только вход: индикаторы
Важнейшими индикаторами являются блоки:
plot – осциллограф;
display – цифровой индикатор.
Блоки без входов и выходов: комментарии
Эти блоки позволяют создавать на рабочем пространстве диаграммы VisSim
текстовые области, которые помогают понять смысл диаграммы и содержат
сведения о том, кто, когда и какую диаграмму создал. Основной блок: label –
этикетка.
Работа №3
Принципы и законы регулирования
Рабочие файлы: [open.vsm] [closed.vsm] [pid.ca4]
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 65 из 100
1. Цель работы
Ознакомление с принципами разомкнутого и замкнутого регулирования.
Исследование процессов преобразования сигналов в каналах типового ПИДрегулятора.
Изучение
свойств
непрерывных
законов
регулирования:
пропорционального (П), интегрального (И), изодромного (ПИ) и вариантов с
дифференцирующим каналом (ПД, ПИД).
2. Предварительное домашнее задание
2.1. Составить передаточные функции W(p) для всех блоков структурных
схем рабочих файлов (рис. 2).
2.2. Кратко описать назначение и принцип действия электронных схем
приведенных на рис. 10 а, б, в, г.
3.
Содержание работы
3.1. Изучить параметры сигнала задания g(t) в файле open.vsm. (определить
интервалы, где координата задания постоянна, меняется с постоянной скоростью
или с постоянным ускорением).
3.2. Включая каналы типового ПИД-регулятора по очереди, изучить, как
формируется сигнал воздействия на объект — u(t) из первичной информации — x(t)
(файл open.vsm).
3.3. В файлах open.vsm и closed.vsm коэффициенты усиления регуляторов
оптимально настроены для управления объектом в соответствии с принципами
Понселе (без ОС) и Ползунова-Уатта (с ОС). По своему усмотрению изменить
параметры объекта и вновь настроить регуляторы.
3.4. Оценить степень влияния изменений параметров объекта на ошибку
регулирования для обоих вариантов управления. При анализе следует учесть, что
статическую составляющую ошибки определяет нестабильность коэффициента
усиления объекта, а динамическую — его постоянная времени.
3.5. Изучить реализацию ПИД-регулятора на ОУ (файл pid.ca4).
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. Привести общее описание типового ПИД-регулятора (структурная
схема, дифференциальное уравнение или передаточная функция, основные
параметры).
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 66 из 100
4.2. Описать принципиальные отличия в формировании сигнала воздействия
на объект u(t) каналами типового ПИД-регулятора (сравнительный анализ): а) при
малых возмущениях в первичной информации x(t), и при больших; б) при
постоянстве входной координаты, при движении её с постоянной скоростью и с
постоянным ускорением. Привести поясняющие графические зависимости.
4.3. Привести переходные процессы: а) при оптимальных настройках
регуляторов для разных принципов регулирования объектом; б) для тех же случаев,
с теми же настройками, но при отклонениях параметров объекта. Дать пояснения.
4.4. Построить два семейства зависимостей приведенной статической
погрешности от изменения коэффициента усиления объекта при разных
коэффициентах передачи пропорционального канала регулятора. В первом
случае — для управления с ОС, во втором — без ОС. Первое семейство
погрешностей привести к сигналу задания 1(t), второе — к среднему значению
коэффициента усиления для каждой вариации (семейство вырождается в один
график). Пояснить результаты.
4.5. Определить для модели ПИД-регулятора на ОУ коэффициенты
усиления каждого канала. Для интегрального и дифференциального каналов
необходимо указать граничные (сопрягающие) частоты или соответствующие
постоянные времени. Нанести значения параметров на ЛАЧХ & ЛФЧХ регулятора.
Выявить соответствие между параметрами и элементами схемы. Описать, какие
ограничения накладывает частотная характеристика типового ОУ на параметры
ПИД-регулятора. Продемонстрировать изменения сдвига фаз сигналов на
характерных участках частотных характеристик, используя сигнал синусоидальной
формы. При выполнении экспериментов следует учитывать, что данный ПИДрегулятор инвертирует сигнал.
Работа №4
Исследование линейных типовых звеньев
Рабочие файлы: [zvenya.vsm] [k((1+tp)(1+tp))^-1.ca4]
[k(1+2etp+(tp)^2)^-1.ca4] [k(p^-1).ca4] [kp.ca4]
1. Цель работы
Исследование взаимосвязей между параметрами типовых динамических
звеньев и их характеристиками. Идентификация реальных технических устройств —
схем на операционных усилителях с типовыми звеньями (т.е. с математическим
описанием). Приобретение навыков использования типовых возмущающих
воздействий и инструментов частотного анализа для исследования систем.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 67 из 100
2. Предварительное домашнее задание
2.1. Составить уравнения и вывести передаточные функции W(p) для всех
блоков файла zvenya.vsm (рис. 9). Структурные схемы блоков приведены на
рис. 4, 5, 6, 7 и 8. Сравнить полученные передаточные функции с типовыми,
идентифицировать блоки по названиям.
2.2. Кратко описать назначение и принцип действия электронных схем
приведенных на рис. 10 д, е, ж.
3. Содержание работы
3.1. В программе VisSim ознакомиться с моделями единичной ступенчатой
функции — 1(t) и дельта-функции — 1'(t) (файл zvenya.vsm). Выявить положенные
допущения (неидеальности) в моделях.
3.2. В программе VisSim (файл zvenya.vsm) выполнить исследование
типовых динамических звеньев (см. п. «Методические указания к моделированию и
рекомендации к содержанию отчета»). По ходу работы необходимо изменить
постоянные времени, коэффициенты затухания и усиления по своему усмотрению.
Убедится, что дифференцирование переходной функции звена — h(t) дает его
функцию веса — (t); и наоборот, интегрирование функции веса звена — (t) дает
его переходную функцию — h(t).
3.3. Выполнить измерения виртуальными приборами (анализатор,
осциллограф) в схемах на операционных усилителях (файлы *.ca4 для программы
Electronics Workbench) с целью идентификации моделей с типовыми динамическими
звеньями. Настроить схемы по совпадению вида ЛАЧХ & ЛФЧХ, а так же реакций
подобных переходной функции и функции веса. Допустимо несовпадение только
коэффициентов усиления.
3.4. Подавая на вход типовых динамических звеньев синусоидальный
сигнал, убедиться, что изменение коэффициента усиления вне полосы пропускания
за одну декаду составляет либо 20 дб (10 раз), либо 40 дб (100 раз).
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. Привести названия и графики использованных типовых возмущающих
воздействий. Описать изменения в реакции типовых звеньев на варьирование
параметров воздействий.
4.2. Для каждого звена привести: а) название звена; б) структурную схему
(подписав входную величину, выходную, сигнал ошибки и обратной связи);
в) вывод передаточной функции (подставить коэффициенты усиления и постоянные
времени; проверить соответствие с линеаризованной передаточной функцией,
которую рассчитывает программа VisSim (Analyze, Transfer Function Info); записать
координаты корней и полюсов функции); г) список параметров с описанием
характера влияния (на ЛАЧХ & ЛФЧХ, переходные процессы, ); д) переходную
функцию; е) функцию веса; ж) ЛАЧХ & ЛФЧХ (определить достигает ли фаза
значения –180 градусов в диапазоне частот и если да, то имеет ли звено на данной
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 68 из 100
частоте коэффициент усиления больший единицы); з) диаграмму Найквиста
(определить охватывает ли АФХ точку (–1, j0); отметить траектории для
положительных и отрицательных частот; точки, в которых частота стремится к
нулю и к бесконечности); и) корневой годограф (определить имеются ли нулевой,
положительные, или чисто мнимые корни; если есть парные корни с мнимой
частью, то по мнимой части определить собственную частоту колебаний звена и
сравнить с колебаниями переходной функции или функции веса, сделать вывод об
устойчивости звеньев).
4.3. Указать на неидеальности, присущие свойствам, которыми обладают
реальные дифференцирующие устройства и их компьютерные дискретные модели.
Пояснить причину неидеальности в дискретных моделях.
4.4. Кроме осциллограмм, ЛАЧХ & ЛФЧХ подтверждающих результаты
настройки схем по пп. 3.3 необходимо привести схемы проведения измерений
(включая источники тест-сигналов) и дать пояснения к ним.
Работа №5
ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ: ПОСТРОЕНИЕ ВРЕМЕННЫХ
ХАРАКТЕРИСТИК С ПОМОЩЬЮ ПРОГРАММЫ VISSIM
1 Цели работы: освоение методов анализа линейных систем с помощью
программы Vissim; изучение основных характеристик типовых линейных звеньев.
Построение и анализ переходных характеристик интегратора, апериодического и
колебательного звеньев
2 Содержание работы: Построить в Vissim’e переходные характеристики
интегратора, апериодического и колебательного звеньев. Проанализировать влияние
изменения их параметров на переходные характеристики.
3
Методические указания к моделированию и рекомендации к
содержанию отчета
3.1 Поместить в рабочее пространство Vissim следующие блоки:
генератор ступенчатого единичного воздействия 1(t): Blocks -->
Signal Producer -> step;
интегратор: Blocks --> Integration -> integrator;
осциллограф: Blocks --> Signal Consumer --> plot.
Подключить выход step к входу integrator’а, выход integrator’а к входу
plot’а. Запустить программу на счет.Обратите внимание, что величина
коэффициента усиления или постоянная времени Т интегратора в Vissim’e не
поддается изменению и всегда равна единице. При необходимости изменить эту
величину следует перед интегратором поставить блок усиления gain: Blocks ->
Arithmetic -> gain, в котором и поменять усиление, что будет эквивалентно
изменению усиления k интегратора. Постоянная времени Т интегратора Т =1/k.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 69 из 100
Найдите связь между постоянной времени Т интегратора и временем, за которое его
выходная величина достигает значения входной ступеньки. Сделайте выводы по
проделанной части работы.
3.2 Поместить в рабочее пространство VisSim следующие блоки:
генератор ступенчатого единичного воздействия 1(t): Blocks -> Signal
Producer -> step;
блок линейной системы, или линейный блок, описываемый передаточной
функцией W(s): Blocks -> Linear System -> Transfer Function;
осциллограф: Blocks -> Signal Consumer -> plot.
Подключить step к входу блока Transfer Function, а его выход к входу
осциллографа plot.
Пусть требуется исследовать апериодическое звено с передаточной
функцией:
k
W(s)= 1 T s , где k = 4,7; T = 0,2 с.
Настроить линейный блок: дважды щелкнуть по блоку левой кнопкой
мыши или один раз правой. В появившемся окне установить: усиление (Gain)
равным 4.7, числитель (Numerator) оставить равным 1, для знаменателя
(Denominator) набрать 0.2 (пробел) 1. Символы "s" и "+" в знаменателе не
указываются, они по принятому в VisSim соглашению заменяются при вводе одним
пробелом. Нажать ОК.
Запустить на счет.
Проанализировать график переходной функции. Найти соотношение между
постоянной времени Т апериодического звена и временем, за которое переходная
функция приближается к своему установившемуся значению на величину, меньшую
5% этого значения. Как еще по переходной характеристике апериодического звена
можно определить значение постоянной времени?
Подключить несколько звеньев к одному осциллографу. Рассмотреть
варианты с различными значениями коэффициента усиления и постоянной времени
(0.01, 0.05, 0.1, 0.5, 1.0, 5.0, 10.0, 50.0, 100.0 сек) апериодического звена. Сделать
выводы.
3.3 Построить переходную характеристику колебательного звена для k =7.8;
Т =1, 0.2 и 5.0, при изменении затухания от 0.25 до 2.0.
k
W(s)= 1 2 T T s
Оценить влияние изменения параметров передаточной функции
колебательного звена на вид и длительность его переходной характеристики.
Открыть новую диаграмму VisSim.
Поместить в рабочее пространство Vissim следующие блоки:
генератор ступенчатого единичного воздействия 1(t): Blocks -> Signal
Producer -> step;
блок линейной системы, или линейный блок, описываемый передаточной
функцией W(s): Blocks -> Linear System -> Transfer Function;
осциллограф: Blocks -> Signal Consumer -> plot.
2
2
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 70 из 100
Подключить step к входу блока Transfer Function, а его выход к входу
осциллографа plot.
Настроить линейный блок: дважды щелкнуть по блоку левой кнопкой мыши
или один раз правой. В появившемся окне установить: усиление (Gain) равным 7.8,
числитель (Numerator) оставить равным 1, для знаменателя (Denominator) в
случае, когда Т=0.2 и =2 набрать 0.04 (пробел) 0.8 (пробел) 1. Символы "s2" и "+", а
также "s" и "+" в знаменателе не указываются, они по принятому в VisSim
соглашению заменяются при вводе пробелами. Нажать ОК.
Запустить на счет.
Проанализировать графики переходных функций подобно тому, как это
делалось ранее.
Проанализировать результаты, оформить и сохранить в специально
созданной папке работу.
3.4 Это звено часто встречается в моделях реальных систем и зачастую его
присутствие ухудшает свойства системы по сравнению с тем, как если бы его не
было. Поэтому, если в реальной системе имеется такой элемент, то для обеспечения
адекватности модели важно ввести его и в модель.Поместить в новое рабочее
пространство блок задержки: Blocks -> Time Delay -> timeDelay. Поместить
слайдер, генератор ступеньки и осциллограф. На вход х блока задержки подать
ступеньку, на вход t подключить слайдер (полосу прокрутки числовых значений) и
выход блока подключить к осциллографу. Изменяя задержку и запуская на счет
посмотреть осциллограммы. Сделать выводы.
Работа №6
ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ: ПОСТРОЕНИЕ ЧАСТОТНЫХ
ХАРАКТЕРИСТИК С ПОМОЩЬЮ ПРОГРАММЫ VISSIM
1 Цели работы: освоение методов анализа линейных систем с помощью
программы Vissim; изучение частотных характеристик типовых линейных звеньев.
Построение и анализ логарифмических амплитудно-частотной (ЛАЧХ) и
фазочастотной (ЛФЧХ) характеристик апериодического и колебательного звеньев.
2 Содержание работы: Построить в среде VisSim, проанализировать и
распечатать ЛАЧХ и ЛФЧХ апериодического и колебательного звена. Открыть
диаграмму с исследованием апериодического звена и колебательного звена,
сохраненную на лабораторном занятии №6.
3 Методические указания к моделированию и рекомендации к
содержанию отчета
Заново установить кириллицу. Выделить блок апериодического звена, нажав
левую кнопку мыши за его пределами и расширив рамку до включения в нее блока.
Отпустить кнопку. Блок станет черным. В меню: Analyze --> Frequecy Response. На
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 71 из 100
рабочем пространстве появятся два графика, представляющие собой ЛАЧХ и
ЛФЧХ. Растянуть их и поместить в правой части экрана друг под другом. Ввести
сетку координат: plot --> двойной щелчок --> Grid Lines – установить флажок.
Нажать OK. На верхнем графике, ЛАЧХ, установить по оси ординат значение в
децибелах.
2.1.2. Для нижнего графика, ЛФЧХ установить значение Y Lower Bound
равным -90 градусов. Поставить флажок Fixed Number of Divisions, установить
значение Y Divisions равным 6. Нажать OK.
2.1.3. Сделать подписи графиков, кривых, осей. Установить белый цвет
фона. Сохранение. Нажать клавишу клавиатуры Print Screen. Открыть Paint (Пуск -> программы --> стандартные --> Paint). Выбрать: Правка --> Вставить. При
необходимости, вырезать в Paint’e лишние части и, нужное, сохранить (по
возможности в gif-формате) и распечатать.
Диаграмму в VisSim’e можно сохранить (в View --> Display Mode) и как
картинку с расширением .wmf, а затем распечатать.
В версии VisSim 2.0k частотные характеристики не сохраняются, поэтому
работа через Print Screen --> Paint только и позволяет получить распечатку.
Проанализировать влияние постоянной времени и коэффициента усиления
апериодического звена на вид его частотных характеристик. Найти, как по ЛАЧХ и
по ЛФЧХ апериодического звена определить его постоянную времени и
коэффициент усиления. Предъявить выполненную работу преподавателю.
РАБОТА№ 7
Анализ устойчивости линейных САР
Рабочие файлы: [mihaylo4.vsm] [d_4_k&t.vsm]
[nyquist.vsm] [ou3.vsm] [ou2+1.ca4]
1. Цель работы
Приобретение навыков использования критериев устойчивости Михайлова и
Найквиста. Исследование влияний параметров систем на их устойчивость. Изучение
методики применения D-разбиения.
2. Предварительное домашнее задание
2.1. По передаточной функции разомкнутой системы (рис. 11, файл
mihaylo4.vsm) записать ее характеристический полином D(p), определить его
коэффициенты, выделить мнимую и вещественную составляющие.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 72 из 100
2.2. Без применения программных инструментов построить асимптотические
ЛАЧХ & ЛФЧХ для передаточных функций, отмеченных звездочкой на рис. 12.
2.3. Для передаточных функций W(p) (см. рис. 12, файл nyquist.vsm) вывести
передаточные функции соответствующих замкнутых систем Ф(p).
2.4. Самостоятельно познакомиться с сутью итерационных алгоритмов.
3. Содержание работы
3.1. Исследовать границу устойчивости (типы границы устойчивости),
используя возможность пакета VisSim задать передаточную функцию с помощью
перечисления корней (нулей и полюсов её числителя и знаменателя). Убедиться, что
только корни-полюсы с неотрицательной вещественной частью приводят к
расходящемуся переходному процессу.
3.2. Исследовать влияние корней характеристического полинома на вид
годографа Михайлова (файл mihaylo4.vsm).
3.3. Изучить влияние контурного коэффициента усиления на устойчивость
системы и вид годографа Михайлова.
3.4. Задавая постоянную времени T2 по варианту (табл. 2), подбором найти
коэффициент усиления системы, при котором она будет находиться на
колебательной границе устойчивости. В качестве признака границы использовать
критерий Михайлова.
Таблица 2
Вари
ант
1
2
3
4
5
T2
0,12;
0,42;
0,72
0,18;
0,48;
0,78
0,24;
0,54;
0,84
0,30;
0,60;
0,90
0,36;
0,66;
0,96
3.5. Познакомиться с применением D-разбиения (файл d_4_k&t.vsm).
Убедиться, что параметры, см. пп. 3.4, образуют точки на границе разбиения.
Определить частоты для этих точек.
3.6. Исследовать на устойчивость передаточные функции, предложенные в
файле nyquist.vsm, применяя годограф Найквиста и логарифмические частотные
характеристики.
3.7. Изучить характер влияния контурного коэффициента усиления на
устойчивость и на полосу пропускания замкнутой системы — модели электронного
усилителя на трехкаскадном ОУ (файлы ou3.vsm и ou2+1.ca4). Менять контурный
коэффициент усиления предполагается делителем в цепи обратной связи.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 73 из 100
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. Для произвольно спроектированных передаточных функций привести
переходные процессы, соответствующие наличию: а) одного и двух нулевых
корней-полюсов; б) паре чисто мнимых корней-полюсов; в) корню-полюсу с
положительной вещественной частью.
4.2. Убедиться, что каждый корень-полюс с отрицательной вещественной
частью разворачивает годограф Михайлова на 90 градусов против часовой стрелки,
а с положительной — на 90 градусов по часовой.
4.3. Продемонстрировать влияние коэффициента усиления на вид
переходных процессов и вид годографа Михайлова (в режиме перекрытия
графиков).
4.4. Для D-разбиения, указать область устойчивости (подтвердить
моделированием) и выяснить влияние параметров на ее размер.
4.5. Среди предложенных к изучению с помощью годографа Найквиста и
логарифмических частотных характеристик найти передаточные функции,
отвечающие следующим признакам: а) астатические (указать порядок); б) имеющие
корни-полюсы с положительной вещественной частью (Transfer Function Info);
б) неустойчивые в разомкнутом состоянии; в) неустойчивые в замкнутом состоянии;
ж) в которых понижение коэффициента усиления приведет к появлению
неустойчивости в замкнутом состоянии; з) в которых повышение коэффициента
усиления приведет к появлению неустойчивости в замкнутом состоянии; д) условно
устойчивые; г) абсолютно устойчивые. Результаты свести в таблицу с отметками
«+» и «–». Методика получения результатов должна быть отображена.
4.6. Пункт 3.7 предполагает построение семейств ЛАЧХ & ЛФЧХ для
разомкнутой и замкнутой систем, при варьировании контурного коэффициента
усиления электронного усилителя. Для замкнутой системы дополнительно
требуется получить семейство переходных характеристик. Кроме пояснения
графических результатов, в отчете привести описание модели трехкаскадного ОУ.
Модель для пакета Electronics Workbench (ou2+1.ca4) предполагается использовать
для сравнительного контроля полученных результатов.
4.7. Описать с точки зрения удобства применения в исследованиях
годографы Михайлова, Найквиста и ЛАЧХ.
Работа № 9
Оценка качества регулирования
Рабочие файлы: [err_ast3.vsm] [err_s^-1.vsm]
1. Цель работы
Ознакомление с основными группами критериев качества (оценивающими
точность, устойчивость, быстродействие и обобщенные свойства САР). Изучение
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 74 из 100
методики использования интегральных оценок качества при исследовании ошибок
систем в типовых режимах движения. Приобретение навыков оценки качества по
переходной характеристике и по АЧХ замкнутой системы.
2. Предварительное домашнее задание
Приравнивая в структурной схеме (рис. 18, файл err_ast3.vsm)
коэффициенты усиления (KI1 & KI2 & KI3), или (KI2 & KI3) или (KI3) к нулю, можно
получить модели САР с астатизмом от нулевого до третьего порядков (считая
исходную).
2.1. Начальные значения коэффициентов усиления установить в
соответствии с вариантом (табл. 3). Вывести передаточные функции по ошибке
Фx(p) для четырех моделей САР при астатизме от нулевого до третьего порядка (см.
рис. 18).
Таблица 3
Вариант 1
KI1; KI2; 25;
KI3
60
2
50; 30;
70
3
50; 35;
80
4
50; 45;
90
5
50; 50; 50;
100
2.2. Для тех же моделей вывести формулы расчёта первых четырёх
коэффициентов ошибки и определить их числовые значения.
2.3. Описать суть интегральной и улучшенной интегральной оценок
качества.
2.4. Составить функцию цены из блоков пакета VisSim, подсчитывающую
количество переходов через ноль ошибки САР в переходном процессе.
3. Содержание работы
3.1. Изучить сигнал задания g(t) спроектированный для введения систем в
режимы типового движения (файл err_ast3.vsm). Заполнить табл. 4.
Таблица 4
Временной промежуток постоянства
параметров сигнала
Параметр сигнала и его значение
3.2. Измерить значения первых четырех установившихся ошибок по:
положению 0, скорости , ускорению , и приращению ускорения g''' для систем с
астатизмом от нулевого до третьего порядков (файл err_ast3.vsm). Параметры
моделей должны соответствовать расчетному заданию. Опираясь на
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 75 из 100
экспериментальные данные определить коэффициент усиления систем в области
низких частот K, а так же добротности по скорости K, ускорению K и приращению
ускорения Kg'''. Определить численные значения коэффициентов ошибок по
положению, скорости, ускорению и приращению ускорения — c0, c1, c2, c3.
Заполнить табл. 5.
Таблица 5
Система
Ошибки
W(p)=1/p0
W(p)=1/p1
W(p)=1/p2
W(p)=1/p3
\ 0 & K & K & K g''' & Kg'''
& c0
& c1
& c2
& c3
3.3. Изучить влияние (качественно) на вид переходной функции h(t) систем с
астатизмом первого второго (и третьего по указанию преподавателя) порядков
возмущающего воздействия f(t). В качестве f(t) использовать сигнал задания g(t)
спроектированный для изучения типовых режимов движения систем. Возмущающее
воздействие подавать до и после интегрирующих элементов, менять его знак и
подбирать амплитуду так, чтобы ошибка от возмущения в установившемся режиме
составляла 1030 % от h(t) и была наглядна при визуальном наблюдении
(информацию удобно представить в режиме перекрытия графиков).
3.4. Минимум три раза оптимально настроить ПИД-регулятор для модели
системы регулирования (файл err_s^-1.vsm), используя разные функции цены —
интегральные оценки качества. Для каждого случая заполнить табл. 6.
Таблица 6
KP
KI
KD
Функция цены и переходная характеристика h(t)
3.5. Оценить запас устойчивости и быстродействие по переходным
характеристикам системы при различных настройках ПИД-регулятора, используя
показатели качества: перерегулирование , длительность переходного процесса tП,
частота колебаний f, допустимое число колебаний, время запаздывания tЗ, время
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 76 из 100
нарастания tН. Величиной допустимых отклонений 2 для определения
длительности переходного процесса задаться самостоятельно.
3.6. Для тех же вариантов настроек ПИД-регулятора, используя АЧХ
замкнутой системы |Ф(j)| определить показатель колебательности М и показатели
быстродействия: резонансную частотуР, полосу пропускания П, частоту среза С,
и эквивалентную полосу пропускания Э.
3.7. Для тех же случаев, определить запас устойчивости по амплитуде
(модулю) L и по фазе , используя АФХ (годограф Найквиста). Повторить
определение по ЛАЧХ & ЛФЧХ.
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. Исследование точности в типовых режимах (пп. 3.1, 3.2, 3.3) следует
проиллюстрировать временными зависимостями с подробными пояснениями.
Внесенные в табл. 4 и 5 данные, должны быть отражены на графиках.
Рекомендуется использовать режим графического наложения результатов
моделирования при изменении знака и точки ввода воздействий.
4.2. Сравнить экспериментальные значения коэффициентов ошибки с
расчетными.
4.3. В основе функций цены для итерационного процесса оптимизации
должны быть: интегральная оценка качества; улучшенная интегральная оценка; и
оценка дополнительно использующая параметры переходного процесса —
перерегулирование или количество колебаний. Сравнить эффективность оценок,
качественно характеризуя принципиально достижимые результаты.
4.4. Показатели качества найденные в пп. 3.5 и 3.7, нанести на переходные
характеристики h(t), АЧХ замкнутой системы |Ф(j)|, АФХ и ЛАЧХ & ЛФЧХ
разомкнутой системы соответственно. Сравнить качество настроек ПИД-регулятора
в трех случаях. АЧХ замкнутой системы |Ф(j)| — это ее ЛАЧХ, у которой ось
модуля не логарифмическая (снимите соответствующую галочку в свойствах
графика). При определении ЛАЧХ & ЛФЧХ разомкнутой системы следует выделить
требуемые блоки структурной схемы и отметить точки входа и выхода сигнала
(Select Input/Output Points).
Работа №10
Повышение точности САР
Рабочие файлы: [1.vsm] [3.vsm] [2.vsm] [4.vsm] [5.vsm]
1. Цель работы
Освоение основных методов повышения точности САР: 1) увеличения
коэффициента усиления разомкнутой цепи, 2) регулирования по производным от
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 77 из 100
ошибки с увеличением контурного коэффициента усиления, 3) повышения степени
астатизма, 4) применения неединичных обратных связей или масштабирующих
устройств на входе / выходе, 5) введения комбинированного управления.
2. Предварительное домашнее задание
2.1. Дано пять систем. Каждая обладает совокупностью уникальных свойств
(табл. 7). В работе изучается пять методов повышения точности САР. Выбрать
наиболее эффективный или единственно возможный метод повышения точности
для каждой САР. Выбор обосновать.
Таблица 7
№
Метод,
п. Свойства САР (состоящих из минимально фазовых звеньев)
файл
п.
САР статическая. Контурный коэффициент мал (<10). Объект и
чувствительный элемент являются одним конструктивным
элементом (нет возможности изменить вид ЛАЧХ прямого канала)
1 ИЛИ: ЛАЧХ разомкнутой системы в области низких частот имеет
наклон –20 или –40 дб/дек. При этом либо в измерительном канале
(на входе, вне контура регулирования) неединичный коэффициент
передачи, либо в цепи обратной связи установлен делитель сигнала
Объект моделируется двумя звеньями: колебательным (с большим
подавлением)
и
апериодическим.
Сопрягающая
частота
2
апериодического звена на две декады меньше резонансной частоты
колебательного звена
ЛАЧХ разомкнутой системы имеет вид 20-0-20-40 (участок с
нулевым наклоном не продолжителен). Предъявлены требования:
3 минимально возможное перерегулирование, и малые собственные
шумы САР. В точке единичного усиления фаза, уменьшаясь,
пересекает значение –90 градусов с небольшим приращением
Объект моделируется двумя звеньями: колебательным (с большим
подавлением)
и
апериодическим.
Сопрягающая
частота
4
апериодического звена на две декады больше резонансной частоты
колебательного звена
ЛАЧХ разомкнутой системы в области низких частот имеет наклон
0 дб/дек. Контурный коэффициент объекта не стабилен в той же по5
лосе частот (в области низких частот); или предъявлено требование
равенства нулю первой или первой и второй составляющих ошибки
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 78 из 100
3. Содержание работы
3.1. Ознакомиться с предложенными моделями, идентифицировать их с
описаниями (см. табл. 7).
3.2. Определить цель применения изучаемых методов повышения точности
для каждой модели (повышение точности в установившихся режимах, увеличение
запаса устойчивости или повышение быстродействия).
3.3. Повысить точность систем в соответствии с выбранными методами.
3.4. Качественно описать результаты применения методов повышения
точности. Рекомендуется использовать переходную функцию h(t). Графическую
информацию удобно представить в режиме наложения (перекрытия) результатов
моделирования.
3.5.
Используя
инструменты
частотного
исследования
систем
(ЛАЧХ & ЛФЧХ) сформулировать ограничения в применении каждого метода
повышения точности.
3.6. Выполнить количественное исследование результатов применения
методов повышения точности САР на основе исследований (измерений) ошибки
x(t). Можно измерить значения первых установившихся составляющих ошибки по:
положению 0, скорости , — до и после применения методов повышения
точности. По необходимости рекомендуется использовать тест-сигналы задания g(t):
единичную ступенчатую функцию 1(t), синусоидальный, меняющийся с постоянной
скоростью или ускорением (см. сигнал g(t) в файле err_ast3.vsm). Для измерений
ошибки рекомендуется использовать: датчики скорости и ускорения
(дифференцирующие звенья), преобразователи построенные в соответствии с
интегральными оценками качества, а так же измерители действующего или
средневыпрямленного значений (см. файл rms_ex.vsm). Выбор схемы измерения
ошибки x(t) следует обосновать.
3.7. Рассмотреть все блоки (звенья), которые применялись для повышения
точности. Назвать техническое устройство их практической реализации. Рассмотрев
все модифицированные модели САР, указать необходимые диапазоны для
подстраиваемых параметров этого устройства.
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. Готовые звенья для изменений в структурных схемах моделей находятся
в блоке Instruments. Только требуемое звено и соответствующий регулятор
настройки нужно перенести и подключить к модели. Изменения в структурных
схемах отразить в отчете.
4.2. Если моделирование занимает много времени (1020 с, VisSim 1.2), то
отключите второстепенные визуализирующие приборы — такие как блок Display.
Синхронный с разверткой вывод на экран информации на каждом шаге расчёта
растягивает последний на 1/50 секунды.
4.3. В случае применения неединичных обратных связей или
масштабирующих устройств на входе / выходе или комбинированного управления
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 79 из 100
использование выходного сигнала чувствительного элемента системы (сумматора)
для исследования ошибки x(t) не имеет смысла. Необходимо вычесть выходной
сигнал y(t) из входного g(t) дополнительным сумматором.
Работа №11
Системы с запаздыванием
Рабочие файлы: [e^(-st).vsm] [Вар1 e^(-st)2.vsm]
[Вар2 e^(-st)2.vsm] [Вар3 e^(-st)2.vsm] [Вар4 e^(-st)2.vsm]
1 Цель работы
Идентификация влияния временного запаздывания на устойчивость и
точностные параметры систем. Ознакомление с различными моделямиаппроксиматорами звена временного запаздывания. Приобретение навыков
обоснования применения моделей с допущениями.
2. Предварительное домашнее задание
2.1. Рассчитать критическое запаздывание для системы (файл e^(-st)2.vsm)
(по вариантам).
2.2. Построить асимптотические ЛАЧХ & ЛФЧХ для звена с передаточной
функцией W(s)=(1-Ts)/(1+Ts).
3. Содержание работы
3.1. Ознакомиться с процессом симуляции в звене временного запаздывания,
построенном на буфере (блок "timeDelay"). Изучить структурное построение двух
предложенных линеаризовананных моделей-аппроксиматоров звена временного
запаздывания (файл e^(-st).vsm).
3.2. Оценить адекватность получаемых результатов при использовании
каждой из трех альтернатив звена в моделях систем, если ставятся задачи:
а) симуляции движения (файл e^(-st).vsm); б) оценки точности (файл e^(-st)2.vsm);
в) оценки запаса устойчивости (файл e^(-st)2.vsm).
4. Методические указания
содержанию отчета
к
моделированию
и рекомендации
к
4.1. При использовании линеаризованных моделей-аппроксиматоров звена
временного запаздывания наиболее схожими переходные процессы будут в случае
использования простейших методов интегрирования - Эйлера, и трапециидального.
В пакете VisSim все функции анализа для блока "timeDelay" не доступны.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 80 из 100
4.2. Выполняя пункт 3.1, следует назвать звенья составляющие моделиаппроксиматоры звена временного запаздывания и указать, каким образом следует
изменить их структуру для более точной аппроксимации.
4.3. Оценить адекватность симуляции движения (пп. 3.2.а) необходимо
исходя из положений: а) сигнал на входе системы имеет широкий спектр (может
меняться с большими скоростями и ускорениями); б) сигнал на входе звена, в силу
инерционных свойств системы, имеет ограниченный спектр.
4.4. Оценить адекватность результатов при исследовании точностных
параметров систем (пп. 3.2.б) необходимо для двух методик. Первая предполагает
измерение ошибок в типовых режимах движения (см. л.р. No 5). Вторая - изучение
параметров ЛАЧХ в области низких частот (см. л.р. No 8).
4.5. Оценить адекватность результатов при исследовании запасов
устойчивости систем (определении критического запаздывания), (пп. 3.2.в)
необходимо для двух методик. Первая предполагает подбор запаздывания при
симуляции движения до получения переходного процесса соответствующего
границе устойчивости. Вторая базируется на изучении частотных свойств
разомкнутой системы в области частоты среза либо по ЛАЧХ & ЛФЧХ, либо по
АФХ (годограф Найквиста).
4.6. Выводы по работе должны содержать рекомендации о том, каким из
аналогов звена временного запаздывания наиболее целесообразно пользоваться и
для каких целей.
Работа №12
Синтез САР
Рабочие файлы: [w1.vsm] [w2.vsm]
1. Цель работы
Приобретение навыков использования метода логарифмических частотных
характеристик и метода корневых годографов для синтеза САР.
2. Предварительное домашнее задание
2.1. В соответствии с вариантом (табл. 10) построить располагаемую ЛАЧХ
объекта регулирования. Учитывая требования к точности и к устойчивости, нанести
на график низкочастотную и высокочастотную запретные области.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 81 из 100
Таблица 10
Параметры
Значения
1
,
Располагае Wo p 100
1 0,33 p 1 2 0,04 p / 3000 p 2 / 3000 2
мая
а, 25, файл w1.vsm
передаточн рис. 26
100
40
1
ая функция Wo p p 1 0,0033 p 1 2 0,04 p / 3000 p 2 / 3000 2
объекта
рис. 26 б, 25 файл w2.vsm
Требования Vm=10 ед./с; Em=100 ед./с2; Xm=0,01 ед.
:
K=0,3 рад/с; =0,573e–3 град; =9e–6 %
к точности
к
M < 1,16
устойчивос
ти
Вариант
1, 2
3, 4
1, 3
2, 4
1, 2, 3, 4
2.2. Определить передаточные функции последовательных (возможно
последовательно-параллельных)
корректирующих
устройств,
которые
рекомендуется разбить на типовые звенья. Составить структурную схему системы с
устройствами коррекции.
3. Содержание работы
3.1. Дополнить структурные схемы в рабочих файлах рассчитанными
последовательными корректирующими звеньями. Проверить, имеет ли ЛАЧХ
системы желаемый вид.
3.2. Пустые блоки «1» и «2» определяют места возможного подключения
средств коррекции к реальной системе. Заменить часть последовательных
корректирующих устройств эквивалентной обратной связью, в соответствии с
заданной структурой системы.
3.3. Точно настроить устройства коррекции и выполнить измерения,
подтверждающие верность результатов синтеза, подавая тест сигналы с
необходимыми параметрами.
3.4. Используя корневой годограф, определить параметр затухания для
сопряженных комплексных корней передаточной функции синтезированной
системы при единичной обратной связи. А также определить во сколько раз должен
увеличиться контурный коэффициент усиления (добротность по скорости), чтобы
система оказалась на границе устойчивости (проверить по переходной функции).
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 82 из 100
4. Методические указания к моделированию и рекомендации к
содержанию отчета
4.1. При синтезе низкочастотных корректирующих устройств следует
полагать, что подъём ЛАЧХ от запретной области не допустим, по причине
возможного возрастания влияния помех и наводок на входе.
4.2. При выполнении измерений, цель которых — определить точность
замкнутой системы, следует подавать синусоидальные сигналы как на участках
границы запретной области с разным наклоном, так и на сопрягающей частоте.
Только фазовую ошибку допустимо измерить, прибегая к функциям частотного
анализа (необходимо задаваться очень узким частотным диапазоном).
4.3. При точной настройке системы по показателю колебательности M
следует помнить, что второй пик АЧХ замкнутой системы |Ф(j)| так же не должен
достигать уровня M.
4.4. Для построения годографа корней в пакете VisSim нужно выделять
разомкнутую систему W(p).
4.5. VisSim строит годограф корней — 1+KocW(p)=0 — характеристического
уравнения замкнутой системы Ф(p) с варьируемым коэффициентом передачи в цепи
обратной связи Koc, для выделенных блоков, которые принимает за разомкнутую
систему W(p):
а) Если Kос=0, то корни уравнения 1+KocW(p)=0 устремляются к корнямполюсам W(p), которые отмечены крестами (только при Kос=0!).
б) Если Kос стремится к бесконечности, то часть корней уравнения
1+KocW(p)=0 устремляется к корням-нулям W(p), а часть — к бесконечности.
в) Если Kос=1, то характеристическое уравнение соответствует единичной
обратной связи.
4.6. Если уточнять координаты корней на траекториях годографов, то
дополнительно будут высвечиваться три соответствующие корню параметра: 1) Koc;
2) параметр затухания — (в программе VisSim — z); 3) угловая частота свободных
колебаний — . По значению Koc, можно оценить: при каких значениях контурного
коэффициента усиления KKос система станет не устойчивой, а также
быстродействие системы. Степень быстродействия определяется по самому
ближнему к мнимой оси корню на траекториях при заданном значении Koc.
Параметр затухания — и угловую частоту свободных колебаний — легко
интерпретировать, если вспомнить, что передаточная функция замкнутой системы с
комплексными корнями Ф(p) часто может быть аппроксимирована колебательным
звеном.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 83 из 100
Работа №13
Коррекция САР
Рабочие файлы: [k1.vsm] [k2.vsm] [k3.vsm] [k4.vsm] [kor_ou3.ca4] [kor_c_in.ca4]
[kor_cout.ca4] [kor_2_ou.ca4] [kor_derv.ca4] [kor_ooc.vsm]
1. Цель работы
Освоение основных методов повышения запаса устойчивости (коррекции)
САР: 1) демпфирования с подавлением высоких частот, 2) демпфирования с
подавлением средних частот, 3) демпфирования с подавлением низких частот.
Приобретение навыков решения типовых задач коррекции схем на операционных
усилителях. Ознакомление с основными видами корректирующих обратных связей:
1) гибкими ООС, 2) жесткими ООС, 3) положительными (изодромное звено на
апериодическом звене).
2. Предварительное домашнее задание
2.1. Дано четыре системы. Каждая обладает совокупностью уникальных
свойств (табл. 8). Подобрать наиболее оптимальное или единственно возможное,
последовательное корректирующее звено для каждой САР (апериодическое,
пассивное дифференцирующее, пассивное интегрирующее, пассивное интегродифференцирующее). Выбор обосновать.
Таблица 8
№
Метод,
п. Свойства САР (состоящих из минимально фазовых звеньев)
звено,
п.
файл
ЛФЧХ разомкнутой системы чуть ниже частоты среза (в пределах
декады) меняет свое значение от –90 до –270 градусов.
1
Допустима минимально возможная потеря частотных свойств
(площади ограниченной ЛАЧХ и осью частот)
ЛАЧХ разомкнутой САР соответствует трехкаскадному
операционному усилителю без внутренней коррекции (звено с
большим коэффициентом усиления и три апериодических звена с
2
близкими сопрягающими частотами), и пересекает ось частот с
наклоном –60 дб/дек. Допустима существенная потеря полосы
пропускания
ЛФЧХ системы вплоть до частоты среза приобретает значения
около –180 градусов. Для исключения условий, при которых
3
возможно
появление
неустойчивости
в
большом,
дополнительные отрицательные фазовые сдвиги не допустимы
4 Вблизи частоты среза и ниже по частоте более декады наклон
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 84 из 100
ЛАЧХ разомкнутой системы составляет –40 дб/дек. Допустима
минимально возможная потеря частотных свойств
2.2. Составить структурную схему и построить ЛАЧХ & ЛФЧХ для
передаточной функции корректирующего звена:
W(p)=1/(1+T1p)+(0,1)+T2p/(1+T2p); T1=0,1; T2=0,0001.
Определиться с его названием. Разобраться, какие изменения в структурной
схеме звена надо сделать, чтобы получить: апериодическое, или пассивное
дифференцирующее или пассивное интегрирующее звено.
3. Содержание работы
3.1. Ознакомиться с первыми четырьмя предложенными моделями систем,
идентифицировать их с описаниями (см. табл. 8). Изменить параметры моделей так,
чтобы их логарифмические частотные характеристики сместились вдоль частотной
шкалы.
3.2. Скорректировать системы в соответствии с выбранными методами
(ввести соответствующие корректирующие звенья в контур и настроить их,
добиваясь устойчивости в замкнутом состоянии).
3.3. Дать количественную характеристику результатам коррекции, оценивая:
полученный запас устойчивости (L & или M), потери точности (K или K или K), и
уменьшение быстродействия (П, С).
3.4. По указанию преподавателя, для одной из исследуемых моделей
составить подобную на операционных усилителях в пакете Electronics Workbench.
Вспомогательную информацию смотри на рис. 10.
3.5. Изучить модели *.ca4, в которых рассмотрены стандартные задачи
коррекции схем на операционных усилителях. Описать суть способов коррекции.
Дать количественную характеристику результатам, оценивая их аналогично пп. 3.3.
Методика размыкания цепи ООС для виртуального анализа частотных свойств схем
на операционных усилителях демонстрируется на рис. 23.
3.6. В соответствии с вариантом (табл. 9), составить подобную схеме на
операционном усилителе модель из блоков пакета VisSim.
3.7. Ознакомиться с тремя наиболее часто используемыми видами
корректирующих обратных связей (файл kor_ooc.vsm). Определить, какими
последовательными корректирующими звеньями можно добиться тех же
результатов.
4. Методические указания к моделированию и рекомендации к содержанию
отчета
4.1. Определить ЛАЧХ & ЛФЧХ разомкнутой системы в пакете VisSim
можно без размыкания контура — необходимо выделить все блоки файла, а за тем
отменить выделение только для источника сигнала и сумматора. Если САР
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 85 из 100
неустойчива, то нужно разорвать контур. Для описанного выделения выполните два
действия: а) установите мышь на свободное место и нажмите Shift+[правая клавиша
мыши] (выделение всей схемы), б) повторная отметка указанной комбинацией
любого элемента схемы отменит выделение для него. В некоторых случаях
потребуется принудительно отметить вход и выход. Далее — стандартно.
Таблица 9
Вариант,
Описание типовых задач коррекции схем на ОУ
модель
Выходное сопротивление ОУ и паразитная емкость монтажа выходных
1
цепей образуют третий полюс ЛАЧХ, ведущий к неустойчивости.
kor_ou3.c
Модель можно рассматривать как схему на трехкаскадном ОУ без или с
a4
частичной внутренней коррекцией
2
Паразитная емкость монтажа входных цепей ОУ и большое
kor_c_in. сопротивление обратной связи образуют апериодическое звено первого
ca4
порядка, которое может привести к неустойчивости схем на ОУ
Необходимость работы ОУ на емкостную нагрузку приводит к тому, что
3
выходное сопротивление ОУ и емкость нагрузки образуют третий
kor_cout.
полюс ЛАЧХ, ведущий к неустойчивости. Малое сопротивление
ca4
емкости нагрузки на высоких частотах может перегрузить выход ОУ
Стремление получить в схемах высокую точность и быстродействие
приводит к необходимости использования двух ОУ (точного и
4
быстродействующего). Но простое последовательное включение
kor_2_ou.
приводит к неустойчивости схемы, поскольку минимальное фазовое
ca4
запаздывание для двух, даже корректированных ОУ составляет 180
градусов
Построение дифференциатора на ОУ вызывает затруднения: а) в петле
ОС ОУ оказывается включенным апериодическое звено с большой
постоянной времени, что увеличивает результирующее запаздывание по
5
фазе свыше значения 180 градусов и приводит к неустойчивости схемы;
kor_derv.
б) входное емкостное сопротивление дифференциатора может вызвать
ca4
неустойчивость и в предыдущем каскаде на ОУ; в) коэффициент
усиления схемы по высокой частоте велик и это ухудшает соотношение
сигнал/шум
4.2. При составлении моделей по пп. 3.4, допускается произвольная инверсия
сигналов в схемах на операционных усилителях, но следует обратить внимание на
результирующий фазовый сдвиг от инверсии.
4.3. Схемотехника инвертирующих включений операционных усилителей
предполагает введение входного сигнала в корректирующую цепь. Если при
построении моделей в пакете VisSim по пп. 3.6 это вызывает затруднения, то можно
перейти к неинвертирующему включению операционного усилителя.
4.4. В пакете Electronics Workbench методика использования виртуального
прибора — анализатора сильно упрощена. На практике, подобные подключения
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 86 из 100
прибора не позволят снять частотную характеристику операционного усилителя с
разорванной обратной связью. Дайте пояснения.
ТРЕБУЕМЫЕ ПРОГРАММНЫЕ ПАКЕТЫ
1. При использовании электронных вариантов данного руководства:
tau.html, или tau.doc или tau.pdf — рекомендуется использовать программы: Internet
Explorer (наиболее удобно), или Netscape Navigator, или Microsoft Word 97, или
Acrobat Reader — соответственно.
2. Для организации учебного процесса следует получить пакет VisSim 3.0
по «Бесплатной Академической Программе» — http://www.vissim.com/products
/academic.html. См. также сайт «VisSim в России» — http://vissim.nm.ru/.
Большинство работ можно выполнить, используя старую версию пакета —
VisSim 1.2, в которой нет годографа Найквиста и оптимизации. Достоинство этого
варианта в том, что руководство, модели и пакет умещаются на одной дискете и
легко могут быть предоставлены студентам для самостоятельной работы дома. В
первой работе имеется ссылка на демонстрационный файл csd_new.scm, который
можно получить по адресу http://www.vissim.com/downloads/demos.html. В форме
нужно отметить пункт «Control system design demo». Отсутствие файла может быть
компенсировано рассказом преподавателя о пакете.
3. Требуемая версия пакета Electronics Workbench не ниже 4.1. Адрес сайта
изготовителя — http://www.electronicsworkbench.com/.
5. Архив моделей (файл tau.zip) вместе с электронными версиями
документа доступен в сети по адресам:
Сайт
http://vissim.nm.ru/
http://www.exponenta.ru/
Раздел
Лабораторные по ТАУ
Методические разработки
Можно получить архив по электронной почте, направив письмо-запрос
автору ([email protected]). При возможных изменениях в адресах
рекомендуется воспользоваться поисковыми системами, используя ключевые слова:
лабораторные, моделирование, управление, системы, ТАУ, VisSim, Electronics
Workbench, дистанционное образование, remote education, Nikolay Klinachyov.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 87 из 100
3.2Практические занятия
Практические занятия – также как и лабораторные занятия направлены на
развитие самостоятельности студентов и приобретение умений и навыков.
Практические занятия должны способствовать углубленному изучению
дисциплины. Именно на этих занятиях студенты учатся высчитывать основные
метода теории линейных систем автоматизации, грамотно излагать проблемы и
свободно высказывать свои мысли и суждения, рассматривают ситуации,
способствующие развитию профессиональной компетентности. Всё это помогает
приобрести навыки и умения, необходимые современному специалисту.
Работа №1
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
Цель работы заключается в исследовании объекта регулирования, а также
определении операторной формы дифференциального уравнения объекта.
Содержание работы: Запишите дифференциальное уравнение объекта
Т2d²y/dt²+T1dy/dt+y=kобх
(1.1)
, где х – возмущающее воздействие, действующее на объект,
у – регулируемая или выходная величина объекта,
t – текущее время, с.
в операторной форме, используя функциональное преобразование Лапласа. Оно
заключается в том, что функция действительного переменного x(t) переводится в
область комплексного переменного х(р) при помощи преобразования Лапласа.
X( s)
st
dt
x( t)e
0
Операция дифференцирование в соответствии с преобразованием Лапласа
записывается следующим образом:
y(t)→ y(p),
dy(t)/dt→py(p),
d²y/dt²→p²y(p),
d³y/dt³→p³y(p).
Таким образом, дифференцирование оригинала соответствует умножению
изображения на р.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 88 из 100
Записав дифференциальное уравнение (1.1) в операторной форме, найдите
передаточную функцию объекта Wоб(р) представляющую собой отношение
преобразованной по Лапласу выходной величины объекта у(р) и преобразованной
по Лапласу входной величины х(р):
Wоб(р)=у(р)/х(р)
Как видно из уравнения (1), динамические свойства объекта характеризуются
тремя коэффициентами:
коб - коэффициентом усиления объекта.
Т1 – постоянная времени демпфирующей составляющей, с.
Т2 – постоянная времени колебательной составляющей, с.
Численные значения этих коэффициентов следует определить по формулам:
коб = (а+1)(с+1);
Т1 = F1(в+1);
Т2 = F2(в+1).
Подставьте в полученное выражение для передаточной функции найденные
численные значения параметров коб, Т1, Т2.
Варианты для выполнения задания:
Вариант
1
2
3
4
5
F1
100
120
140
200
210
F2
40
55
60
100
80
а
0
1
2
3
4
в
5
6
7
8
9
с
1
2
3
4
5
РАБОТА №2
ПРЕОБРАЗОВАНИЕ СТРУКТУРНЫХ СХЕМ
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 89 из 100
Цель работы заключается в изучении правил преобразования структурных
схем.
Содержание работы: Рассчитать передаточную функцию систему используя
правила преобразования структурных схем. Варианты исходных структурных схем
и значений параметров передаточных функций выбираются из таблицы № 2, 3.
Таблица №2.
Вариант
Номер схемы
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
Варианты схем:
Схема №1.
W4
+
W1
W3
Схема №2.
-
W2
Вариант передаточных функции
N
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 90 из 100
W4
+
W1
W2
+
W3
Схема №3.
W4
-
W1
W2
+
W3
Схема №4.
W4
W1
+
W2
-
W3
Таблица 3 Варианты передаточных функции:
Передаточная
функция
Выражение
W1
k/Т*s+1
W2
K/(T1*s+1)(T2*s+1)
W3
k/s
W4
k*(T*s+1)
N
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
К
0,5
1
20
70
11
0,5
3
7
15
100
3
7
9
11
15
3
2
Параметры
Т1
10
15
0,3
2
0,5
10
0,3
2
7
5
5
11
Т2
2
4
7
0,3
1
-
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
3
4
5
Страница 91 из 100
7
0,4
100
0,3
1
0,8
-
Работа №3
ПРЕОБРАЗОВАНИЕ СЛОЖНЫХ СТРУКТУРНЫХ СХЕМ
Цель работы заключается в изучении правил преобразования
структурных схемах.
сложных
Содержание работы: Рассчитать передаточную функцию системы.
Используя правила преобразования структурных схем. Варианты исходных
структурных схем и значений передаточных функций задаются при помощи
таблицы №4, 5.
Таблица №4.
Вариант
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Номер
схемы
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
Варианты передаточных функции
N
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 92 из 100
Таблица №5 Варианты передаточных функции:
Передаточная
функция
Выражение
W1
k/Т*s+1
W2
k/s
W3
k*(T*s+1)
N
Параметры
Т1
10
15
0,3
2
0,5
5
11
0,3
1
0,8
К
0,5
1
20
70
11
3
7
9
11
15
3
2
7
0,4
100
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
Т2
-
Варианты структурных схем:
Схема №1.
1
2
3
12
W1
+
3
W2
+
W3
-
W3
Схема №2.
g
1
2
W1
x
+
3
-
1
W2
-
2
W3
3
y
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 93 из 100
Схема №3.
W3
1
2
+
3
1
2
W1
-
W2
3
+
Схема №4.
W3
1
2
-
3
+
1
2
W1
W2
3
W1
РАБОТА №4
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМ ПО КРИТЕРИЮ РАУСА
Цель работы заключается в определении устойчивости системы
автоматического управления по алгебраическому критерию Гурвица.
Содержание работы: Записать дифференциальное уравнение объекта
регулирования (согласно таблицы № 6 по варианту). Определить передаточную
функцию по задающему и возмущающему воздействиям. Записать
характеристическое уравнение по задающему и возмущающему воздействиям.
Заполнить таблицу Рауса. Определить по таблице Рауса является ли система
устойчивой. Сделать выводы.
Таблица №7
Номер
варианта
1
2
3
Передаточная функция
замкнутой системы:
Передаточная функция
разомкнутой системы:
6
6
3
2
0 003 s 0.95 s 0.6 s 12
3
2
0.003 s 0.95 s 0.6 s 1
11
11
2
0 12s 5 s 6
2
0.12 s 5 s 1
10
3
10
2
0 00085 s 0.69 s 0.7 s 14
3
2
0.00085 s 0.69 s 0.7 s 1
УМКД 042-14-02-03.1.20.95/03-2008
4
5
6
7
8
9
10
11
12
13
14
15
16
Редакция №1
Страница 94 из 100
1
1
0 007s 0.954 s 6
0.007 s 0.954 s 1
2
2
2
2
3
2
0 006 s 0.88 s 0.4 s 18
3
2
0.006 s 0.88 s 0.4 s 1
15
15
2
2
0 005s 0.95 s 6
0.005 s 0.95 s 1
22
22
3
2
0 0068 s 0.998 s 0.7 s 68
3
2
0.0068 s 0.998 s 0.7 s 1
2
2
4
3
2
0.02 s 0.2 s 1 s 2
4
3
2
0.02 s 0.2 s s 1
5
5
3
2
3
2
0 0058 s 0.58 s 0.5 s 6
0.0058 s 0.58 s 0.5 s 1
5
5
4
3
2
0.002 s 0.5 s 1.2 s 23
4
3
15
3
15
2
3
0 8 s s 0.5 s 6
2
0.8 s s 0.5 s 1
7
4
7
3
2
0.007 s 0.05 s 1.002 s 11
4
3
2
0.007 s 0.05 s 1.002 s 1
25
3
2
0.002 s 0.5 s 1.2 s 1
25
2
3
0 09 s s 5 s 6
2
0.09 s s 5 s 1
1.5
1.5
4
3
2
4
3
0.0075 s 0.055 s 1.502 s 1
0.0075 s 0.055 s 1.502 s
11
11
3
2
0 09001 s 12s 5 s 6
3
3
2
0.09001 s 12 s 5 s 1
6.05
4
2
6.05
2
0.1075 s 0.055 s 0.502 s 10
4
3
2
0.1075 s 0.055 s 0.502 s 1
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 95 из 100
Работа №7
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ПО КРИТЕРИЮ НАЙКВИСТА.
Цель работы заключается в определении устойчивости системы
автоматического управления по частотному критерию Найквиста.
Содержание работы: Записать передаточную функцию разомкнутой
системы (согласно таблицы №Д по варианту).Найти частотную передаточную
функцию Выделить вещественные и мнимые части. Построить кривую Найквиста и
определить является ли система устойчивой согласно условию устойчивости
критерия Найквиста. Сделать выводы.
РАБОТА №8
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ПО МЕТОДУ Д-РАЗБИЕНИЯ.
Цель
параметрам.
работы
заключается
в
выделение области устойчивости по
Содержание работы: Записать передаточную функцию замкнутой
системы(согласно таблицы №Д по варианту).Найти характеристическое уравнение и
комплексный полином данной функции. Выделить вещественные и мнимые части.
Выделить область устойчивости по параметрам. Определить является ли система
устойчивой. Сделать выводы.
Работа №9
АНАЛИЗ УСТОЙЧИВОСТИ САУ ПО ЛЧХ.
Цель работы заключается в определении устойчивости
автоматического управления по ЛЧХ разомкнутой системы.
системы
Содержание работы: Записать передаточную функцию разомкнутой
системы.
Найти частотную передаточную функцию. Выделить вещественные и мнимые
части. Построить ЛАЧХ и ЛФЧХ определить является ли система устойчивой
согласно условию устойчивости, а также определить запасы по модулю и по фазе.
Сделать выводы.
Передаточные функции разомкнутой выбираем из таблицы № 8 согласно
выданному варианту.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 96 из 100
Таблица №8
Номер
варианта
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Передаточная функция
замкнутой системы:
6
3
2
0.003 s 0.95 s 0.6 s 1
10
3
2
0.00085 s 0.69 s 0.7 s 1
11
3
2
0.09001 s 12 s 5 s 1
25
3
2
0.09 s s 5 s 1
15
3
2
0.8 s s 0.5 s 1
5
3
2
0.0058 s 0.58 s 0.5 s 1
22
3
2
0.0068 s 0.998 s 0.7 s 1
2
3
2
0.006 s 0.88 s 0.4 s 1
10
3
2
0.00085 s 0.69 s 0.7 s 1
6
3
2
0.003 s 0.95 s 0.6 s 1
2
3
2
0 006 s 0.88 s 0.4 s 18
15
3
2
0 8 s s 0.5 s 6
6
3
2
0 003 s 0.95 s 0.6 s 12
10
3
2
0 00085 s 0.69 s 0.7 s 14
25
3
2
0 09 s s 5 s 6
11
3
2
0 09001 s 12s 5 s 6
Работа №10
ПОСТРОЕНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Цель работы заключается в построении кривой переходной процесса
методом трапеции.
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 97 из 100
Содержание работы: Записать передаточную функцию замкнутой системы.
Найти частотную передаточную функцию. Выделить вещественную часть.
Построить переходную характеристику методом трапеций. Сделать выводы.
Передаточные функции замкнутой системы выбираем из таблицы №9
согласно выданному варианту.
Таблица №9
Номер
варианта
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Передаточная функция
замкнутой системы:
6
3
2
0.003 s 0.95 s 0.6 s 1
10
3
2
0.00085 s 0.69 s 0.7 s 1
11
3
2
0.09001 s 12 s 5 s 1
25
3
2
0.09 s s 5 s 1
15
3
2
0.8 s s 0.5 s 1
5
3
2
0.0058 s 0.58 s 0.5 s 1
22
3
2
0.0068 s 0.998 s 0.7 s 1
2
3
2
0.006 s 0.88 s 0.4 s 1
10
3
2
0.00085 s 0.69 s 0.7 s 1
6
3
2
0.003 s 0.95 s 0.6 s 1
2
3
2
0 006 s 0.88 s 0.4 s 18
15
3
2
0 8 s s 0.5 s 6
6
3
2
0 003 s 0.95 s 0.6 s 12
10
3
2
0 00085 s 0.69 s 0.7 s 14
25
3
2
0 09 s s 5 s 6
11
3
2
0 09001 s 12s 5 s 6
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 98 из 100
Работа №11
ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
Цель работы: заключается в определении прямых показателей качества
регулятора при помощи построения кривой переходного процесса.
Содержание работы: по построенной в практической работе №10
переходной характеристики определить следующие показатели качества
переходного процесса:
-
время переходного процесса;
перерегулирование переходного процесса;
время максимального перерегулирования;
время нарастания.
ЛИТЕРАТУРА:
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического
регулирования. — M.: Наука, 1975.
2. Сборник задач по теории автоматического регулирования и управления/
Под редакцией В.А. Бесекерского. — M.: Наука, 1978.
3. Титце У., Шенк К. Полупроводниковая схемотехника: Справочное
руководство/ Пер. с нем. — М.: Мир, 1982.
4. Хоровиц П., Хилл У. Искусство схемотехники: В 3 т./ Пер. с англ. —
М.: Мир, 1993.
4 Самостоятельная работа студента
При кредитной системе обучения предъявляются высокие требования к
повышению качества организации самостоятельной работы студента, которая
включает выполнение различных домашних заданий.
Самостоятельная работа студента под руководством преподавателя – одна из
форм учебной работы при кредитной системе обучения, которая проводится в виде
аудиторного занятия в диалоговом режиме, а также в виде консультаций во
внеаудиторное время.
Содержание самостоятельной работы студентов под руководством
преподавателя и чисто самостоятельной работы студента приведено в таблице 4, 5.
Таблица 4 План СРСП
СРСП
аудиторная
внеаудиторная
УМКД 042-14-02-03.1.20.95/03-2008
Редакция №1
Страница 99 из 100
СРСП №1 Принципы функционирования
моделирующих пакетов.
( Основы
работы с программой Vissim)
СРСП №3 Исследование линейных типовых
звеньев.
СРСП №5 Типовые динамические звенья:
построение временных характеристик с
помощью программы Vissim
СРСП №7 Преобразование сложных
структурных схем
СРСП №9 Исследование устойчивости по
критерию Гурвица.
СРСП №11 Исследование устойчивости по
критерию Найквиста.
СРСП №2 Набор коммуникационных схем в
программной среде Vissim .
СРСП №13 Анализ устойчивости САУ по
ЛЧХ.
СРСП №15 Анализ устойчивости линейных
САР.
СРСП №17 Оценка качества регулирования.
СРСП №19 Системы с запаздыванием
СРСП №21 Коррекция САР
СРСП №14 Исследование устойчивости по методу
Д-разбиения.
СРСП №16 Исследование переходных процессов.
СРСП №4 Принципы и законы регулирования.
СРСП №6 Типовые динамические звенья:
построение частотных характеристик с помощью
программы Vissim
СРСП №8 Преобразование структурных схем
СРСП №10 Исследование устойчивости систем по
критерию Рауса.
СРСП №12 Исследование устойчивости по
критерию Михайлова.
СРСП №18 Повышение точности САР
СРСП №20 Синтез САР
СРСП №22 Методы повышения точности систем
автоматического управления.
Таблица 5 План СРС
Номер
СРС
СРС
№1
СРС
№2
СРС
№3
СРС
№4
СРС
№5
СРС
№6
СРС
№7
СРС
№8
СРС
№9
СРС
№10
СРС
Тема СРС
Взаимосвязь понятий: техническая кибернетика, автоматическое управление,
вычислительная техника, теории информации.
Основные понятия и определения (управления, регулирования, структурная и
функциональные схемы, входные и выходные координаты, управляющие и возмущающие
воздействия).
Принцип построения автоматических систем управления, разомкнуты и замкнутые
системы с компенсацией возмущений, с адаптацией.
Классификация автоматических систем управления (одно и многоконтурные, одно и
многомерные линейные и нелинейные, непрерывные и дискретные).
Статические и динамические характеристики объектов.
Переходная функция, импульсная переходная функция, реакция на гармоническое
воздействие.
Связь выходного и входного сигналов линейной системы на основании интеграла
свертки.
Понятия о минимально-фазовых системах. Условие физической реализуемости.
Особенности частотных реализуемых систем.
Аппроксимация реальных объектов типовыми звеньями на основании анализа
экспериментальных переходных функций
Связь спектральных плотностей на выходе и входе линейной системы. Прохождение
случайного сигнала через линейную систему.
Случайный сигнал в замкнутой системе. Уравнение Винера-Хопфа его решение.
УМКД 042-14-02-03.1.20.95/03-2008
№11
СРС
№12
СРС
№13
СРС
№14
СРС
№15
СРС
№16
СРС
№17
СРС
№18
СРС
№19
СРС
№20
СРС
№21
СРС
№22
СРС
№23
СРС
№24
СРС
№25
СРС
№26
Редакция №1
Страница 100 из 100
Вычисление среднего квадрата ошибки на выходе АСР.
Определение устойчивости динамической системы. Устойчивость движения и состояния.
Необходимое и достаточное условие устойчивости.
Определение устойчивости по логарифмическим частотным характеристика. Запасы
устойчивости. Влияние запаздывания на устойчивость. Д-разбиение по одному и двум
параметрам.
Приближенное построение переходных процессов по частотным и временным
характеристикам
Прямые показатели качества переходных процессов (время переходного процесса,
динамическая и статическая ошибки).
Интегральные критерии качества. Взаимосвязь различных критериев качества.
Суждение о качестве регулирования по частотным характеристикам замкнутой системы.
Понятия о расширенных частотных характеристиках. Типовые законы регулирования
промышленных регуляторов – П, И, ПИ, ПД, ПИД. Оптимальные настройки регуляторов.
Расчет оптимальных настроек с учетом случайных возмущений. Приближенные методы
расчета регуляторов.
Показатели качества переходных процессов
Модели временной области, дифференциальные уравнения в частных производных,
краевые и начальные условия.
Методы анализа переходных процессов и качества систем с запаздыванием. Методы
компенсации влияния запаздывания.
Системы с запаздыванием. Методы анализа устойчивости, критическое запаздыванием
систем с запаздыванием.
Синтез автоматических систем.
Коррекция обыкновенных непрерывных стационарных систем.
Комбинированное управление. Инвариантность и принцип двухканальности. Фильтрация
помех.