ЛЕКЦИЯ 1
реклама

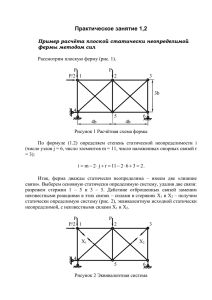
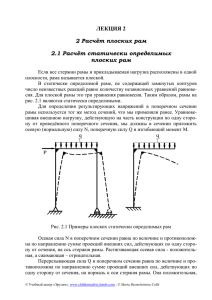
ЛЕКЦИЯ 1 В курсе технической механики рассматривались объекты, представляющие отдельный стержень, расчётная схема которого – одномерная. При соединении стержней получаем стержневую систему. При изучении курса рекомендуется следующая литература: 1. Андреев В.И. Техническая механика [Текст] : учебник / В.И. Андреев, А.Г. Паушкин, А.Н. Леонтьев. - М. : АСВ, 2012. - 256 с. 2. Строительная механика / под ред. В.А. Смирнова. – М., 2013 Введение Расчёт статически неопределимых балок методом сил Напомним, что статически неопределимой системой называется такая система, в которой число наложенных связей превышает число уравнений статики. В статически неопределимых системах невозможно определить все силы, пользуясь только уравнениями статики. Необходимо привлекать дополнительные уравнения. В случае расчёта балки статическая неопределимость её обусловлена наличием «лишних» с точки зрения статики опорных связей. Если балка, опорные связи и приложенная нагрузка находятся в одной плоскости, то на плоскости достаточно трёх связей для того, чтобы балка была геометрически неизменяемой системой и могла воспринимать нагрузки. Число «лишних» связей степень статической неопределимости системы. Рассмотрим примеры – рис. 1.1. P А q B а A B С D б Рис. 1.1 Примеры статически неопределимых балок Так как заделка накладывает три связи, что достаточно на плоскости для геометрической неизменяемости, то балка на рис. 1.1 а является один раз статически неопределимой (одна «лишняя» связь). Балка же на рис. 1.1 б – дважды статически неопределима (две «лишних» связи). © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 2 Методика составления канонических уравнений метода сил Рассмотрим один раз статически неопределимую балку (рис. 1.2 а). Отбросим «лишнюю» связь – опору в точке В – получим статически определимую балку (рис. 1.2 б). Назовём статически определимую систему, которая получается из исходной системы после отбрасывания «лишних» связей основной системой. Чтобы из неё получить систему, эквивалентную исходной, необходимо приложить нагрузку и реакцию отброшенной связи, которую мы не знаем. Обозначим её через Х1 (рис. 1.2 в). Приложим к основной системе внешнюю нагрузку – силу Р (рис. 1.2 г). Перемещение в направлении Х1 от действия внешней нагрузки – силы Р обозначим через Δ1Р. Но в направлении Х1 действует ещё нагрузка – сама сила Х1. Она неизвестна. Приложим вначале в направлении Х1 единичную силу – получим перемещение δ11. Теперь приложим силу в Х1 раз больше единичной – получим перемещение в Х1 раз больше, чем от единичной силы, т.е. δ11Х1. Суммарное же перемещение в точки приложение реакции опоры будет δ11Х1 + Δ1Р и оно будет равно нулю, так как в исходной системе эта точка под действием внешней нагрузки – силы Р и реакции опоры Х1 равно нулю, так как опора остаётся на месте: 11X1 1P 0 . (1.1) Уравнение (1.1) называется каноническим уравнением метода сил. Физический смысл его – перемещение в направлении отброшенной связи от внешней нагрузки и неизвестных реакций в отброшенных связях равно нулю. В общем случае n раз статически неопределимой системы, отброшенных связей будет n. Столько же будет неизвестных реакций в отброшенных связях, и перемещение в направлении каждой из отброшенных связей от внешней нагрузки и этих неизвестных реакций будут равны нулю. Итак, система канонических уравнений для n раз статически неопределимой системы запишется: 11X1 12 X 2 ... 1n X n 1P 0 21X1 22 X 2 ... 2n X n 2P 0 ... ... ... ... n1X1 n 2 X 2 ... nn X n nP 0 © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé (1.2) Расчёт стержневых систем. Лекция 1 P А B а Основная система б Р Эквивалентная система в Х1 Р Δ1Р г δ11 1 д δ11Х1 Х1 е Рис. 1.2 Идея метода сил где коэффициенты и свободные члены системы уравнений определяются, согласно интегралу Максвелла-Мора (см. курс «Техническая механика»), формулами: Mi M j MM ij dz, ip i P dz, i 1,2,...n . (1.3) EI EI l l Интегралы в (1.7) могут быть вычислены по правилу Верещагина. 1 Расчёт плоских ферм 1.1 Две расчётных схемы стержневых систем © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé 3 Расчёт стержневых систем. Лекция 1 4 Стержневые системы находят широкое применение в строительных конструкциях. Если нагрузка в стержневой системе прикладывается по узлам, а стержни являются длинными и тонкими, то с достаточной степенью точности напряжённо-деформированное состояние подобной стержневой конструкции описывается ферменной расчётной схемой. В этом случае соединение стержней в узлах можно считать идеально - шарнирным, а стержни - работающими только на растяжение-сжатие. Использование расчётной схемы стержневой системы в виде фермы существенно упрощает расчёт. Однако в расчётной схеме стержневых конструкций в одних случаях соединение стержней может быть принято шарнирным (рис. 1.3 а), т.е. таким, при котором в узле конструкция не сопротивляется повороту одного стержня относительно другого, а в других – жёстким (конечной или бесконечной жёсткости) (рис. 1.3 б). При бесконечной жёсткости углы между стержнями не меняются. Шарнирным соединение стержней в узлах можно принять тогда, когда, полагая наличие в каждом из узлов стержневой системы (рис. 1.4 а) шарнира, получаем такую систему (рис. 1.4 а), в которой изменение расстояний между узлами возможно только за счёт деформации стержней, т.е. система является геометрически неизменяемой. а б Рисунок 1.3 - Стержневые системы Если же изменение расстояний между узлами в случае замены их шарнирами возможно без деформаций стержней (рис. 1.4 б), т.е. система является геометрически изменяемой и представляет собой механизм, то стержневую систему нельзя рассматривать по расчётной схеме фермы. В этом случае необходимо полагать, что соединение стержней в узлах обладает бесконечной или конечной жёсткостью (рис. 1.4 в). © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 а 5 б в Рисунок 1.4 - Расчётные схемы фермы (а) и рамы (в) Таким образом, в случае, когда стержни соединяются между собой с помощью шарниров, а нагрузка в виде сил прикладывается только к узлам, то стержневая система называется фермой (рис. 1.4 а). Если же в расчётной схеме соединение стержней обладает жёсткостью (конечной или бесконечной), то система называется рамой (рис.1.4 в). 1.2 Кинематический анализ фермы Рассмотрим образование плоской фермы. Геометрически неизменяемым элементом такой фермы может быть треугольник. Его составляют три стержня, соединённых на концах тремя шарнирами (рис. 1.5 а). Если к двум шарнирам геометрически неизменяемой фермы присоединим ещё два стержня, концы которых будут соединены одним шарниром, то опять получим геометрически неизменяемую систему (рис. 1.5 б). Таким образом, продолжая операцию дальше, получим геометрически неизменяемую плоскую систему, для которой связь между числом стержней m и числом шарниров j имеет вид: m 2 j 3. (1.4) Например, плоская ферма, изображённая на рис. 1.5 в, имеет 6 шарниров, три опорных стержня и 9 стержней, т.е. удовлетворяет соотношению (1.4). Образованная плоская система должна быть закреплена с помощью опорных связей. Если опорных связей 3, то получим статически определимую плоскую систему (рис. 1.5 г). Если опорных связей или стержней будет больше, то ферма станет статически неопределимой. Таким образом, степень статической неопределимости плоской фермы можно найти по формуле: © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 2 2 4 2 6 5 4 1 а 1 3 б 4 2 1 3 1 6 3 в 4 5 2 5 1 6 3 6 3 г д Рисунок 1.5 - Образование геометрически неизменяемой фермы 6 6 i m 2 j r, (1.5) На рис. 1.5 д показана плоская ферма, которая с введением стержня 3 - 5 стала один раз статически неопределимой: i 10 2 6 3 1 . Перед началом всякого расчёта конструкции необходимо убедиться в правильности образования системы, т.е. проверить геометрическую неизменяемость системы. Геометрически изменяемые системы могут менять свой облик при нулевой нагрузке. Установим, когда это может случиться. 1. Если степень статической неопределимости, вычисленная по формуле (1.5), является отрицательным числом i < 0 , то система является геометрически изменяемой – в ней не хватает стержней или опорных связей. 2. Система является геометрически изменяемой тогда, когда число её стержней и связей достаточно, но она образована неправильно. Пример такой системы – плоская ферма на рис. 1.6 (чтобы система стала геометрически неизменяемой, необходимо, например, стержень 5 – 3 переставить в положение 4 – 2). Изменяемость таких систем можно установить обратным образованию фермы путём, т.е. разбирая её. © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 4 7 6 5 1 3 2 Рисунок 1.6 – Геометрически изменяемая система В случае плоской фермы убирать каждый раз следует шарнир с двумя стержнями, примыкающими к нему. Если в конце останется треугольник – система собрана правильно, если нет – ферма образована неправильно, её схему надо изменить. 3. Третьим случаем является так называемая мгновенная изменяемостью. 1.3 Расчёт статически определимых ферм Основным методом определения сил в стержнях статически определимой фермы является метод вырезанием узлов. Рассмотрим применение этого метода на примере расчёта плоской фермы (рис. 1.7) 4 2 1 1 Р 5 3 Рисунок 1.7 – Плоская ферма Последовательно вырезаем узлы: узел 1 (рис. 1.8 1 N1-2 Р N1-3 Рисунок 1.8 – Равновесие узла 1 Из двух уравнений равновесия определяем силы N1-2 и N1-3 ( Fy 0 N1-3 , Fx 0 N1-2 ). Далее вырезаем узел 2 и определяем силы © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 8 N2-3 и N2-4 и т.д. Очевидно каждый раз выбирать узел необходимо с двумя неизвестными силами для плоской фермы. 1.4 Расчёт статически неопределимых ферм методом сил Если для геометрически неизменяемой фермы из формулы (1.5) следует, что ферма n раз статически неопределима, то для определения усилий в её элементах можно применить метод сил, который рассматривался выше для балок. Суть этого метода заключается в том, что «лишние».с точки зрения статики связи отбрасываются так, чтобы полученная система была статически определима и геометрически неизменяема (основная система). Отброшенные связи заменяются неизвестными усилиями в этих связях и получаем для расчёта эквивалентную статически определимую систему, но с неизвестными реакциями в отброшенных связях. Условием её эквивалентности исходной статически неопределимой системе является условие отсутствия перемещений в направлении отброшенных «лишних» связей от действия приложенной нагрузки и неизвестных реакций в отброшенных («лишних») связях: i 0, i 1,2,...n , (а) где n – число отброшенных связей (степень статической неопределимости). Распишем систему уравнений (а), представив перемещение в направлении каждой отброшенной связи как сумму перемещений от каждой из неизвестных реакций в направлении отброшенных связей плюс перемещение в направлении этой отброшенной связи от внешней нагрузки, т.е. 11X1 12 X 2 ... 1n X n 1P 0 21X1 22 X 2 ... 2 n X n 2 P 0 , ... ... ... ... n1 X1 n 2 X 2 ... nn X n nP 0 (1.6) где коэффициенты и свободные члены системы уравнений представляют собой: ij - перемещение в направлении i – ой отброшенной связи от единичного усилия в направлении j – ой отброшенной связи; iP - перемещение в направлении i – ой отброшенной связи от внешней нагрузки. Эти величины определяются по формуле Максвелла-Мора, которая в случае произвольно нагруженного стержня (бруса) запишется: © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Расчёт стержневых систем. Лекция 1 M x M x dz l M y M y dz l M z M z dz EI x EI y EI 0 0 0 9 l l 0 l l N z N z dz Q Q dz x x x y EA GA 0 0 (1.7) Q y Q y dz GA где Мx, Му, Мz – изгибающие моменты относительно осей х и у поперечного сечения бруса и крутящий момент; Qx, Qy, N – поперечные и осевая силы в поперечном сечении бруса от приложенной внешней нагрузки к основной статически определимой системе. Величины с надчёркиванием – те же внутренние силовые факторы от действия единичных нагружений в направлении отброшенных связей. Интегрирование производится по всей конструкции. Учитывая, что в поперечном сечении фермы действуют только осевые силы и они постоянны по длине каждого стержня и считая жёсткость ЕА постоянной по длине каждого стержня, получим: ij N i N jl k k EkAk , i, j 1,2,...n - (1.8) перемещение в направлении i – ой отброшенной связи от действия Xj = 1; iP k Ni N Plk , i 1,2,...n EkAk (1.9) перемещение в направлении i – ой отброшенной связи от действия внешней нагрузки. Суммирование проводится по всем стержням фермы. © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé