Задание на курсовой проект №
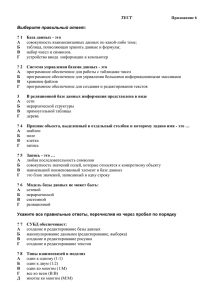
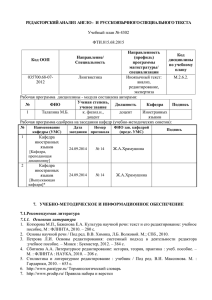
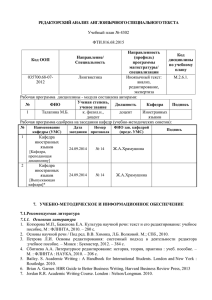
advertisement

Задание на курсовой проект № 1 Моделирование наблюдающего устройства Математическая модель объекта описывается уравнениями состояния: x1 x 2 , x 2 x3 , x 3 x1 3.5 x 2 3.5 x3 u, y x1 , где х- вектор состояния, у – выход, u - управление. Уравнение наблюдающего устройства, с помощью которого по значениям выходного и входного сигналов восстанавливаются переменные состояния: xˆ1 2.5 y 2.5 xˆ1 xˆ 2 , xˆ 1.5 y 1.25 xˆ xˆ , 2 1 3 xˆ 3 0.625 y 1.62 xˆ1 3.5 xˆ 2 3.5 xˆ 3 u , yˆ xˆ1 , где x̂ - вектор состояния наблюдающего устройства. Разрабатываемая программа моделирования должна обеспечивать: ввод, редактирование и сохранение в файле начальных условий объекта x(t0), начальных условий наблюдающего устройства x̂ (t0), и значение входного воздействия u = const; - ввод, редактирование и сохранение в файле параметров моделирования: шага моделирования t , времени моделирования tк; - вывод результатов моделирования в виде таблицы и в виде графика. Должны выводится следующие переменные y, ŷ , ei xi xˆi , i 1..3 . Моделирование произвести: T T 1) при u = 0 и начальных условиях x(t 0 ) 1 1 1 , xˆ(t 0 ) 0 0 0 ; - T T 2) при u = 1 и начальных условиях x(t 0 ) 0 0 0 , xˆ(t 0 ) 1 1 1 . Задание на курсовой проект № 2 Моделирование процесса изменения уровня в цилиндрическом резервуаре Математическая модель цилиндрического резервуара (рис.1) имеет вид: x1 bu, x 2 F 2 gx 2 x1 , S где x1 – расход жидкости, втекающей в резервуар (м3/с), х2 – уровень жидкости в резервуаре (м), F – площадь проходного сечения сливной трубы (м2), 1 коэффициент гидравлического сопротивления, g – ускорение свободного падения (м/с2), S – площадь поверхности жидкости (м2). u(t) 1 х1 0 -1 t0 t1 t x1(t) х2 F t Рис.1 Рис. 2 Входное воздействие u = const задает скорость открытия вентиля на входном трубопроводе, поэтому для изменения расхода x1 входное воздействие необходимо задавать в виде прямоугольного импульса (рис.2). Разрабатываемая программа моделирования должна обеспечивать: - ввод, редактирование и сохранение в файле параметров математической модели: b, F, , S. - ввод, редактирование и сохранение в файле начальных условий объекта x(t0), и значение входного воздействия u = const, промежутка времени [t0,t1], на котором действует входное воздействие; - ввод, редактирование и сохранение в файле параметров моделирования: шага моделирования t , времени моделирования tк; - вывод результатов моделирования в виде таблицы и в виде графика. Должны выводится следующие переменные u, x1, x2. Задание на курсовой проект № 3 Моделирование процесса изменения уровня в сферическом резервуаре Математическая модель сферического резервуара (рис.1) имеет вид: x1 bu, x 2 F 2 gx 2 x1 (2 Rx 2 x22 ) , где x1 – расход жидкости, втекающей в резервуар (м3/с), х2 – уровень жидкости в резервуаре (м), F – площадь проходного сечения сливной трубы (м2), 1 коэффициент гидравлического сопротивления, g – ускорение свободного падения (м/с2), R – радиус резервуара (м). u(t) 1 х1 0 -1 t0 t1 t x1(t) х2 F t Рис.1 Рис. 2 Входное воздействие u = const задает скорость открытия вентиля на входном трубопроводе, поэтому для изменения расхода x1 входное воздействие необходимо задавать в виде прямоугольного импульса (рис.2). Разрабатываемая программа моделирования должна обеспечивать: - ввод, редактирование и сохранение в файле параметров математической модели: b, F, , S. - ввод, редактирование и сохранение в файле начальных условий объекта x(t0), и значение входного воздействия u = const, промежутка времени [t0,t1], на котором действует входное воздействие; - ввод, редактирование и сохранение в файле параметров моделирования: шага моделирования t , времени моделирования tк; - вывод результатов моделирования в виде таблицы и в виде графика. Должны выводится следующие переменные u, x1, x2. Задание на курсовой проект № 4 Теплообменник для разогрева протекающей жидкости Математическая модель теплообменника (рис.1) имеет вид: 1 Fk Fk Fk TНП QНП TНП (T1M T1НП ) TM , m НП 2C НП m НП C НП m НП C НП m НП TM ( 1 Fk Fk Fk QM )TM (T1НП T1M ) TНП , mM 2C M mM C M mM C M mM TНП T2 НП T1НП , TM T2 M T1M , где: T1НП – температура нефтепродукта на входе в теплообменник; T2НП – температура нефтепродукта на выходе из теплообменника; TНП – разность температур нефтепродукта на выходе и входе; T1М – температура масла на входе в теплообменник; T1М – температура масла на выходе из теплообменника; TМ – разность температур масла на выходе и входе; Q НП – массовый расход нефтепродукта; Q M – массовый расход масла; m НП – масса нефтепродукта, находящегося в теплообменнике; m M – масса масла, находящегося в теплообменнике; F – площадь, на которой происходит теплообмен; k – коэффициент теплопередачи от масла к нефтепродукту. Т2НП Т1НП Т2М Т1М Котел (масло) Рис. 1. Входным воздействием для системы является расход масла QМ (кг/с), расход нефтепродукта QНП (кг/с) является возмущающим воздействием на систему. Разрабатываемая программа моделирования должна обеспечивать: - ввод, редактирование и сохранение в файле параметров теплообменника: массы масла и нефтепродукта в теплообменнике, теплоемкости масла и нефтепродукта, площадь теплообмена, коэффициента теплопередачи. - ввод, редактирование и сохранение в файле начальных условий объекта: TНП, TМ; - ввод, редактирование и сохранение в файле параметров моделирования: шага моделирования t , времени моделирования tк; - вывод результатов моделирования в виде таблицы и в виде графика. Должны выводится следующие переменные TНП, TМ. Задание на курсовой проект № 5 Нагревательная установка Математическая модель нагревательной установки (рис.1) имеет вид: x1 a11 x1 a12 x2 bu 2 , x 2 a 21 x1 a 22 x 2 , где: х1 – температура водяной рубашки, х2 – температура жидкости в нагревательной установке, u = const – напряжение на нагревательном элементе. x1 x2 U Рис. 1. Входным воздействием для системы является напряжение на нагревательном элементе (В). Разрабатываемая программа моделирования должна обеспечивать: - ввод, редактирование и сохранение в файле параметров нагревательной установки аij. - ввод, редактирование и сохранение в файле начальных условий объекта: x1(t0), x2(t0); - ввод, редактирование и сохранение в файле параметров моделирования: шага моделирования t , времени моделирования tк; - вывод результатов моделирования в виде таблицы и в виде графика. Должны выводится следующие переменные x1, x2. Тестовое моделирование провести при следующих значении параметров: а11 = 0.1, а12 = 0.2, а21 = 0.08, а22 = 0.18, b = 30. Задание на курсовой проект № 6 "Разработка программных средств моделирования магнитного подвеса" Целью курсового проекта является разработка программных средств моделирования системы управления высотой подвеса тела в магнитном поле (рис.1). КЦ С УН УМ ЭМ Iэм Uз U R2 ФТ Uh h Рис.1. Ферромагнитное тело (ФТ) подвешивается в пространстве в поле электромагнита (ЭМ) с регулируемым током Iэм. Высота подвеса h измеряется при помощи фотооптической системы, состоящей из лампочки-осветителя (О) и фотоэлемента (ФЭ), вырабатывающего ЭДС Uh, пропорциональную высоте подвеса h. ЭДС Uh сравнивается с задающим напряжением Uз, величина которого определяет высоту подвеса h . Разность напряжений Uз - Uh = U составляет ошибку регулирования, которая усиливается по величине и мощности усилителями напряжения (УН) и мощности (УМ), и определяет ток, а следовательно, и силу притяжения ФТ электромагнитом. При движении ФТ вниз ЭДС Uh уменьшается, т.к. ФТ больше перекрывает световой поток освещающий ФЭ. При этом напряжение ошибки регулирования, ток ЭМ и сила притяжения тела ЭМ увеличиваются, что обеспечивает стабилизацию высоты подвеса тела. Корректирующая RC- цепь (КЦ) служит для обеспечения устойчивости системы управления. Математическая модель данной системы выводится на основе 2-го закона Ньютона и уравнений теории электрических цепей. На основании 2-го закона Ньютона можно записать m d2h Fэм P dt (1) где m - масса тела; Fэм - сила, создаваемая ЭМ; P = mg - вес тела. Сила, создаваемая ЭМ, пропорциональна току ЭМ, т.е. Fэм k эм P где kэм - коэффициент пропорциональности. (2) Ток ЭМ связан с напряжением ошибки дифференциальным уравнением L эм d I эм R эм I зм k у U dt (3) где Lэм - индуктивность обмотки; Rэм - активное сопротивление; Ку - коэффициент усиления усилителей УН и УМ. Последнее уравнение определяет ошибку регулирования U U э U h (4) где Uh = Kфэ h; Кфэ - коэффициент передачи датчика высоты подвеса. Уравнения (1 - 4) представляют собой упрощенную математическую модель системы управления. При включении корректирующей цепи КЦ до бавляется еще одно уравнение aT1 dU кц dt U кц a(T1 dU U) dt (5) где T1 = R1 C; a = R2 / (R1 + R1). Если при моделировании используется КЦ, то в уравнение (3) вместо U следует записать Uкц. Численные значения коэффициентов математической модели: m = 100г = 0,1кг Ку = 10 Lэм = 5 Гн Кэм = 10 н/А, Rэм = 100 ом Т1 = 1с а = 0,05 Кфэ = 1 в/м Исходные данные для моделирования: параметры математический модели; начальные условия; значение входного воздействия; det - шаг численного решения диф. уравнений; fintim - промежуток времени моделирования; outdel - шаг по времени для табличного вывода результатов моделирования. Все исходные данные должны сохраняться в файле с расширением dat. Задание на курсовой проект № 7 Моделирование уравнений теплопроводности Целью курсового проекта является разработка программных средств моделирующих изменение температуры в тонком металлическом стержне, вытянутом вдоль оси x (рис.1). 0 1 x Рис.1. Стержень является полностью теплоизолированным. Поток тепла распространяется только в направлении оси x. Уравнения теплопроводности имеют вид U t CU xx , 0 x 1, (1) где U - температура; Ut- производная по времени; Uxx- вторая производная по пространственной координате x; C = k/(s ) = 1 - постоянный коэффициент, численное значение которого зависит от коэффициента теплопроводности k, удельной теплоемкости материала s, плотности материала . При решении дифференциальных уравнений в частных производных используются начальные условия, задающие распределение температуры по стержню в нулевой момент времени U(0, x) sin(314 . x), 0 x 1 (2) и граничные условия, задающие температуру на концах стержня для всех значений времени U( t , 0) a , U( t ,1) b, t 0. (3) Для моделирования изменения температуры в стержне можно использовать конечно разностную аппроксимацию U mj 1 U mj t c U mj1 2 U mj U mj1 (4) ( x) 2 уравнений теплопроводности (1). Исходными данными для моделирования являются: начальные условия ( 2 ); граничные условия ( 3 ); параметры моделирования, к которым относятся шаг сетки по времени t , шаг сетки по пространственной координате x , промежуток времени моделирования fintim, шаги вывода результатов моделирования по времени t и по пространственной переменной x. Результаты моделирования должны представляться в виде таблицы: t x0 x1 … ti, i = 0..k xn+1 Задание на курсовой проект № 8 Моделирование линейных динамических систем Целью курсового проекта является разработка программных средств моделирования линейных динамических систем: x Ax Bu, x( t 0 ) x 0 , u const , y Cx Du, (1) где xRn - вектор систояния; uRm - вектор управления; yRm - вектор выхода; ARnxn, BRnxm , CRlxn , DRlxm - матрицы постоянных коэффициентов; x0 - начальные условия. Исходные данные для моделирования: n, m, l - размеры векторов; A, B, C, D - матрицы системы управления; x0 - начальные условия; u - значение входного воздействия; t - шаг численного решения диф. уравнений (1); tк - промежуток времени моделирования; outdel - шаг по времени для табличного вывода результатов моделирования.