Document 886459
advertisement

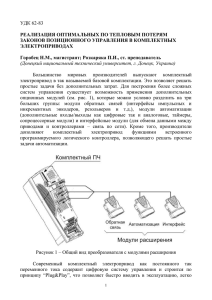
УДК 681.5:62-83 РОБАСТНОСТЬ АЛГОРИТМОВ КОСВЕННОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ОРИЕНТАЦИЕЙ ПО ВЕКТОРУ ПОТОКОСЦЕПЛЕНИЯ СТАТОРА: ТЕОРЕТИЧЕСКИЙ АНАЛИЗ И РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНОГО ТЕСТИРОВАНИЯ С. М. Пересада, д.т.н., проф., С. Н. Ковбаса, к.т.н., доц., А. Ю. Онанко асс., А. Б. Воронко аспирант Национальный технический университет Украины «Киевский политехнический институт» г. Киев, пр-т. Победы 37, ФЭА, каф. АЭМС-ЭП, www.epa.kpi.ua E-mail: sergei.peresada@gmail.com, skovbasa@ukr.net, arturvoronko@gmail.com В статье представлено решение задачи синтеза алгоритма векторного управления скоростьюпотокосцеплением асинхронного двигателя с ориентацией по вектору потока статора. Алгоритм гарантирует асимптотическую отработку угловой скорости и потокосцепления статора, асимптотическую косвенную ориентацию по вектору потокосцепления статора, декомпозицию исходной структуры асинхронного двигателя на две связанные подсистемы – электрическую и механическую. Структура алгоритма управления предоставляет дополнительную степень свободы для формирования динамических характеристик и свойств робастности к параметрическим возмущениям. Представлены результаты сравнительного экспериментального тестирования, подтверждающие достоверность теоретических выводов. Ключевые слова: асинхронный двигатель, векторное управление, статорное полеориентирование. Введение. Алгоритмы векторного управления асинхронными двигателями (АД) на сегодня являются фактически промышленным стандартом и неотъемлемой опцией большинства преобразователей частоты мировых производителей. Электромеханические системы, построенные на их основе, демонстрируют высокие показатели качества регулирования механических координат в условиях, когда параметры АД являются известными. Вместе с тем, проблема обеспечения робастности алгоритмов управления к параметрическим возмущениям АД до настоящего времени открыта и является предметом значительного числа исследований [1]. Одним из известных способов повышения робастности систем векторного управления является использование ориентирования по вектору потокосцепления статора. Такие решения являются более сложными с точки зрения практической реализации, однако их структура предоставляет дополнительную степень свободы для формирования динамических характеристик и свойств робастности к параметрическим возмущениям [2]. Целью данной работы является дальнейшее развитие теоретического результата [2] за счет проведения анализа структурных свойств алгоритмов векторного управления, основанных на статорном полеориентировании, а также их полномасштабного экспериментального тестирования. Алгоритм управления. Современная постановка задачи синтеза алгоритма векторного управления предусматривает нахождение нелинейного динамического контроллера по измеряемому выходу, который при выполнении стандартных допущений [3] обеспечивает: О.1. Асимптотическую отработку регулируемых координат. О.2. Асимптотическую ориентацию по вектору потокосцепления статора. О.3. Асимптотическую развязку динамики регулирования механических координат и потокосцепления. О.4. Робастность по отношению к параметрическим возмущениям АД. В работе, следуя процедуре синтеза [2], [3], с использованием непрямого полеориентирования по вектору потокосцепления статора, разработан алгоритм векторного управления, который задается: - динамическим регулятором потокосцепления i*d L m 1 i*d 2i*q z* z* v d , (1) 0 0 Lm 1 i*q i*q vq z* i*d , где 0 , 0 – угловое положение и скорость вращения синхронной системы координат d q относи- a b ; – тельно стационарной угловая скорость ротора, 2 0 ; i , i - заданные значения то* q * d ков статора i d ,i q , id id i*d , iq i q i*q – ошибки отработки токов статора по осям d и q; z * 0 , * – заданное потокосцепление статора; vd Lm id , vq Lm iq – робастифицирующие корректирующие связи, R 2 L2 , Lm L2 , L1 L L 2 , R 2 – активное сопротивление ротора, L1 , L2 – индуктивности статора и 2 m ротора соответственно, L m – индуктивность намагничивающего контура; z* i*d >0. - регулятором угловой скорости 2J ˆ i*q M c * 1 , 3z* M̂ c k i , (2) 1 k 1 , где k , k i – коэффициенты пропорциональной и интегральной частей регулятора скорости, – постоянная времени фильтра, J – момент инерции; - регуляторами токов u d i*d 2i*q z* i*d k i id vq , (3) u q i*q 2i*d z* i*q k i id vd , где u d , u q – компоненты управляющего вектора напряжений статора, R1 Lm , R1 – актив- ное сопротивление статора, k i 0 коэффициент пропорциональной части регуляторов тока. Без потери общности, в модели АД и алгоритме (1) – (3) принята одна пара полюсов. В работе, с использованием второго метода Ляпунова показано, что алгоритм (1) – (3) гарантирует достижение целей управления О.1 – О.3, а также предоставляет дополнительную степень свободы для формирования динамических характеристик и свойств робастности к параметрическим возмущениям. Выполнен анализ структурных свойств уравнений динамики ошибок отработки в электрической подсистеме, которая формируется при действии алгоритма (1) – (3). Установлено, что использование статорного полеориентирования позволяет сформировать полный вектор корректирующих обратных связей электрической подсистемы, в то время как при роторном полеориентировании для его формирования необходимо использовать наблюдатель потокосцепления полного порядка, что существенно усложняет алгоритм управления. Результаты экспериментального тестирования. Полномасштабное сравнительное экспериментальное тестирование алгоритмов векторного управления выполнено на станции быстрого прототипного тестирования, которая состоит (рис.1) из асинхронного двигателя мощностью 5.5 кВт; нагрузочной машины постоянного тока; трехфазного инвертора с номинальным током 25 А, напряжением 380 В и несущей частотой ШИМ 2.5 кГц; системы управления, на базе цифрового сигнального процессора (TMS320F28335), которая позволяет реализовать алгоритмы векторного управления и передачу выбранных переменных на персональный компьютер. Скорость двигателя измеряется с помощью оптического энкодера с разрешающей способностью 2500 имп/об. интервала времени 00.25 с машина возбуждается, траектория заданного потокосцепления начинается с * (0) 0.02 Вб и достигает значения 1.04 Вб; начиная с t = 0.6 с двигатель без нагрузки разгоняется по заданной траектории скорости от 0 до 50 рад/с (30 % от номинальной) за 0.25 с; в момент времени t = 1.25 с к валу двигателя прикладывается, а при t = 2.25 с снимается постоянный момент нагрузки, равный номинальному значению; при t=3 с, двигатель замедляется до 10 рад/с (6,7 % от номинальной) за 0.2 с; на интервале 45.25 с к валу двигателя прикладывается номинальный момент нагрузки. Заданная скорость, рад/с, профиль момента нагрузки, Нм Заданное потокосцепление, Вб 60 ω* 1 Мс 40 0.5 20 0 0 CS2 + Voltage sensor ~380 V ~380 V C CS1 Ошибка отработки скорости, рад/с 5 is1 is2 ω Load control PWM PC DSP-controller based on TMS320F28335 (32 bit, floating point) Рисунок 1 – Функциональная схема лабораторной установки Параметры использованного в экспериментах АД следующие: номинальный момент – 36.7 Нм, число пар полюсов – 2, R1 0.94 Ом, R 2 0.65 Ом, L1 L2 0.1228 Гн, Lm 0.117 Гн, J 0.169 кг·м2. При тестировании использовались следующие значения настроечных коэффициентов: k 50 , k i k 2 4 625 , 0.001 с; k i 700 . Экспериментальные тесты выполнены с использованием представленной на Рис. 2 последовательности операций управления. Во время начального 2 4 t, c Ток статора по оси q, А 20 0 0 0 -20 2 4 t, c 0 Активная мощность, кВт 4 2 4 t, c Ток статора по оси d, А 20 2 Encoder 0 t, c 0 качества регулирования и энергетической эффективности. -5 DC 4 Рисунок 2 – Последовательность операций управления Графики переходных процессов ошибки отработки угловой скорости, токов статора и потребляемой активной мощности при выполнении теста в условиях известных параметров показаны на Рис. 3. Установлено, что при известных параметрах как робастифицированный алгоритм (1) – (3), так и его упрощенная версия, которая формируется при vd vq 0 , обеспечивают одинаковые показатели R IM 2 10 0 -2 0 0 2 4 t, c 0 2 4 t, c Рисунок 3 – Переходные процессы при известных параметрах Для оценки влияния робастифицирующих связей vd , v q на динамические и энергетические процессы в условиях параметрических возмущений, введена вариация активного сопротивления ротора путем задания его значения R̂ 2 =1.7R2 в управляющем контроллере. Графики переходных процессов при использовании алгоритма (1) – (3) без корректирующих обратных связей показаны на Рис. 4, в то время как на Рис. 5 приведены процессы с включенными робастифицирующими связями. В результате выполнения тестов установлено, что в условиях вариаций использование зависимых от скорости коррек- тирующих связей позволяет сохранить показатели качества регулирования угловой скорости на номинальном уровне, см. Рис. 3. В то же время работа алгоритма при vd vq 0 сопровождается ухудшением динамики регулирования угловой скорости и завышением потребляемой двигателем активной мощности в установившемся режиме на 12.5%. Ошибка отработки скорости, рад/с 5 Ток статора по оси q, А 20 0 0 -5 0 -20 2 4 t, c 0 Активная мощность, кВт 4 2 4 t, c Ток статора по оси d, А 20 2 10 0 -2 0 0 2 4 t, c 0 2 4 t, c Рисунок 4 – Переходные процессы при работе алгоритма без коррекции, с R̂ 2 1.7R 2 Ошибка отработки скорости, рад/с 5 20 0 -5 Ток статора по оси q, А 0 -20 2 t, c 0 Активная мощность, кВт 4 2 4 t, c Ток статора по оси d, А При снижении угловой скорости динамика регулирования угловой скорости и потребляемая мощность обеими алгоритмами становятся соизмеримыми, поскольку со снижением скорости действие связей vd , v q ослабевает. Выводы. Представлено решение задачи синтеза алгоритма косвенного векторного управления с ориентированием по вектору потокосцепления статора. Показано, что благодаря целенаправленно достигнутой структуре алгоритма управления, возможно формирование как динамических характеристик, так и свойств робастности к параметрическим возмущениям. Результаты экспериментального тестирования подтверждают повышенные свойства робастности синтезированного алгоритма к вариациям активного сопротивления ротора. ЛИТЕРАТУРА 1. Krishnan R. Electric Motor Drives. – New Jersey, Upper Saddle River: Prentice Hall, 2001. – 626 p. 2. Пересада С. М., Ковбаса С. Н., Онанко А. Ю. Семейство алгоритмов отработки момента- потока асинхронного двигателя при косвенной ориентации по вектору потокосцепления статора // Электротехнические и компьютерные системы. Вип. 3/2011 (79). – С. 25 – 27. 3. Peresada S., Tilli A., Tonielli A. New passivity based speed-flux tracking controllers for induction motor // in Proc. Annual Conf. of the IEEE Industrial Electronics Society – IECON 2000. – Nagoya, Japan. – P. 1099 – 1104. 20 2 10 0 -2 0 0 2 4 t, c 0 2 4 t, c Рисунок 5 – Переходные процессы при работе алгоритма с коррекцией, с R̂ 2 1.7R 2 ROBUSTNESS OF INDUCTION MOTOR INDIRECT STATOR FIELD ORIENTED VECTOR CONTROL ALGORITHMS: THEORETICAL ANALYSIS AND EXPERIMENTAL INVESTIGATION Peresada S. M., D.Sc., Prof. Kovbasa S. N.,Ph.D., Asc. Prof., Onanko A. Y., Ass., Voronko A.B. Ph.D student National technical university of Ukraine “Kiev polytechnic institute” The passivity based induction motor speed-flux vector control algorithm is presented. Proposed control algorithm guarantees asymptotic speed-stator flux tracking, asymptotic indirect stator flux orientation, and induction motor decomposition on two interconnected systems – electrical and mechanical. Control algorithm structure provides additional degree of freedom for dynamic performance and robustness properties specification. The results of extended experimental testing are also presented and confirm the theoretical findings. Keywords: induction motor, vector control, stator field orientation. REFERENCES 1. Krishnan, R. (2001), Electric Motor Drives, New Jersey, Upper Saddle River, Prentice Hall. 2. Peresada, S., Kovbasa, S. and Onanko, A. (2011) “The set of passivity based induction motor torque-flux vector control algorithms with indirect sta- tor flux orientation”, Elektrotehnicheskie i kompyuternyie sistemy, vol. 79, no 3, pp. 25–27. 3. Peresada, S., Tilli, A. and Tonielli, A. (2000) “New passivity based speed-flux tracking controllers for induction motor”, in Proc. Annual Conf. of the IEEE Industrial Electronics Society, IECON 2000, Nagoya, Japan, pp. 1099–1104.