Горобец 2
реклама

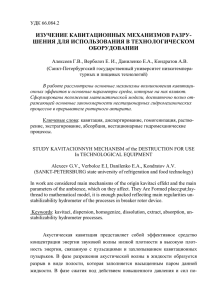
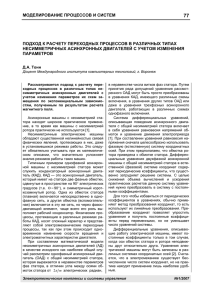
УДК 62-83 РЕАЛИЗАЦИЯ ОПТИМАЛЬНЫХ ПО ТЕПЛОВЫМ ПОТЕРЯМ ЗАКОНОВ ПОЗИЦИОННОГО УПРАВЛЕНИЯ В КОМПЛЕКТНЫХ ЭЛЕКТРОПРИВОДАХ Горобец Н.М., магистрант; Розкаряка П.И., ст. преподаватель (Донецкий национальный технический университет, г. Донецк, Украина) Большинство мировых производителей выпускают комплектный электропривод в так называемой базовой комплектации. Это позволяет решать простые задачи без дополнительных затрат. Для построения более сложных систем управления существует возможность применения дополнительных опционных модулей (см. рис. 1), которые можно условно разделить на три больших группы: модули обратных связей (интерфейсы импульсных и инкрементных энкодеров, резольверов и т.д.), модули автоматизации (дополнительные входы/выходы как цифровые так и аналоговые, таймеры, сопроцессорные модули) и интерфейсные модули (для обмена данными между приводами и контроллерами – связь по сети). Кроме того, производители дополняют комплектный электропривод функциями встроенного программируемого логического контроллера, позволяющего решать простые задачи автоматизации. Рисунок 1 – Общий вид преобразователя с модулями расширения Современный комплектный электропривод как постоянного так переменного тока содержит цифровую систему управления и строится по принципу “Plug&Play”, что позволяет быстро вводить в эксплуатацию, легко 1 обслуживать и диагностировать. С помощью параметрирования можно выбрать необходимый режим работы привода – режим управления моментом, скоростью или положением. Но для решения задач позиционирования необходимо применять специальные, так называемые модули управления движением (Motion Control). Эти модули позволяют реализовывать задающие устройства для системы управления положением и решать конкретные прикладные задачи. Вложенные в них алгоритмы управления используют треугольные или трапецеидальные тахограммы. Такие тахограммы обеспечивают управление, оптимальное по быстродействию. Реализация других законов управления позиционным электроприводом, например, оптимальных по тепловым потерям, на таких модулях невозможна. В этом случае можно использовать другие, например, сопроцессорные модули, которые позволят применить алгоритмы, отличающиеся от встроенных, для решения задач позиционирования. Целью работы является проверка результатов, полученных аналитическими методами [1, 2], на экспериментальной установке на базе комплектных электроприводов. На рисунке 2 переставлена функциональная схема позиционного электропривода на базе преобразователя частоты Control Technique и дополнительного сопроцессорного модуля SM–Application. На рисунке обозначены: ЗП – задатчик положення, РП – регулятор положення, РС – регулятор скорости, КРМ – контур регулирования момента, МЧ – механическая часть, ДС – датчик скорости, ДП – датчик положения Рисунок 2 – Функциональная схема позиционного электропривода На рисунке 3 представлена оптимальная по тепловым потерям диаграмма с ограничениями на скорость, ускорение (момент) и рывок. На рисунке обозначены: М(t) – кривая момента, развиваемого двигателем, ρ(t) – рывок, ω(t) – скорость двигателя, φ(t) – перемещение. 2 100 50 200 Рисунок Секция 202Т M R ~3РЕN, (t) 1в11 3– - 2 2 10 20 Ионы v F TA 3I Яч.№59 35Т Яч.№72 Яч.№74 Яч.№76 IЯч.№80 16 14 12 10 8 6 4 2.5 2 1.5 0 -0.5 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 Мембрана, Канал Гц + 12 11 I6 510 7 8 4 3 2 1 9 U f/f 0,8 0,6 0,4 0,2 давление fкН/м E 30 20 10 напряжен МВ/м скорость /v Ікв/Іф.п. ТЗЛМ K1 K2 VC1 1давление R̂ М1 Мn Рисунок Рисунок Рисун R2 а б 724536tB t˚ R1 εIβ 1/R М VT2 VT1 VD R3 c01ВРи C М, , 12Э δ= δmin 2Элемент Э δδmaх С at, a10 P rc 1-1 . ; коммутаторо Загальний Втрати ТДНГ220/380 В, кВ X мембране «ротора» «статор» Q IBM PC кабi кабn ность CН3 TV 2сунок пазовая 11–-ок Схема 1 –1– 3 – 2. о.е. 4700 м (плата Lвигляд електроене 10000/110/3 50 Гц 4000 электриче 154) Модель биологич Характер Дискови Схемати Принцип Схема часть Динамич Полная Структур Эпюра Схема – інтерфейсу ргії ,15 в Блокского створеної Україні вибрацио еского истики й чне ова приєднан обмотки еская модель на напряже питания ротор схема поля схема моделі вибрацио нного электрод биологич магнітоп ІПЕВТ: зображен схема ня статора; тепловая системы моделі секции нно- 31 П Epo Io 1/Rao Uy 1 Kt*i 2 kc*w 3 1e-3 2BO p 1 c/K 1/K 1/La L K T C Т *U АЦП *.p+1 3U AO А0 В кабi кабn Д С 112 0 С УП P УП ИсICO Присв ячуєть ся 75річчю пристр нного электрог вигателя. еского –ровід ня пристро схема «квазича СС. деформи диск, кВ из 2– р кафед ою электрог енератор электрод -зубчасто ІПЕВТ ю лобовая замещен стотный осциллог рованног лопаті до з и ри діагно аенератор вигателя: ю дискови блокуван бортової часть ия преобраз рафирова АД о с н а: поверхне м ня мережі обмотки термодет ователь состояни астуван ния – – ц «Гірни авнешние; ю ротором стартера автомобі статора; ектором асинхрон параметр –ня я . и ча Рисунокп2 – Узагальнена схема системи регулювання бклеевого внешняя, типу ля ный –режим –ов елект з використанням спостерігача стану. мощност б „Сандвіч обмотка двигател режима -стыкашвидкості о ів ьротех регулиро ”: ротора; ь» работы в1 і 2 – в роботи зависимо вочная. дискові двигател ніка і– а стиасинхр магнітоп зубцы от я автом нагрузки. роводи статора; сетевого онних з с атика зубчасто насоса – х двигун ю ім. корпус №3 е ів: будовою статора Р.М. м прилегли над 1 – а Лейбов х блок пакетом а» поверхон а часови ь; статора; 3 і 4 - н ДонНТ х радіальні– а У і л позиці зубці корпус Рисунок 3 – Диаграмма отработки заданного перемещения й; 2 – о статора пази магнітоп над г блок роводів; лобовым а Аналогичные эксперименты проводились и с ПЧ Schneider Electric и виявлемодуля расширения Controller Inside. Полученные результаты показали 5 ння – и возможность реализации сложных законов позиционирования в современных дисковий л ушкодкомплектных электроприводах. ротор частями я жень типу обмотки м Перечень ссылок кіл „Сандвіч статора; б ”; датчик 6 – д 1. Толочко О.И., Коцегуб П.Х., Розкаряка П.И. Синтез задатчика шар зубцы ів та а положения с ограничением рывка при учете статического момента // Вісник провідни статора; номерКременчуцького державного політехнічного університету: Наукові праці кового – д у немагнітКДПУ. корпус і – Кременчук: КДПУ. – 2008. – №3 (50). – Ч.1. – С. 58-63 аварій ного статора о 2. Полинский С.В., Розкаряка П. И., Толочко О.И. Формирование по тепловым потерям диаграмм позиционного электропривода с ного оптимальных матеріал над д значением рывка // Автоматизація технологічних об’єктів та у двигунзаданным пакетом а Пошук молодих: Збірник наукових праць VІ Міжнародної науковоа; 3 процесів. – технічної конференції аспірантів і студентів в м. Донецьку. – Донецьк: статора; блок – 2006. – С. 151-153 сигналДонНТУ. – корпус ізації й статора надзахист у від лобовым и анорм 3 альних частями режим обмотки