Международная конференция тезисы. Троян Д.И.
advertisement

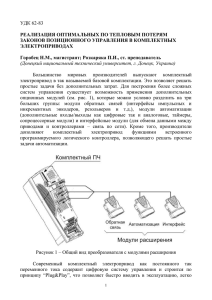
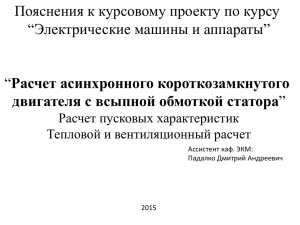
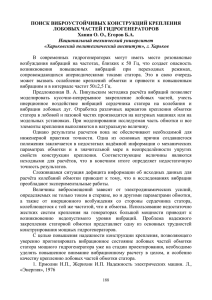
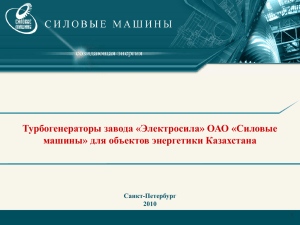
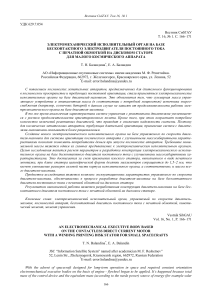
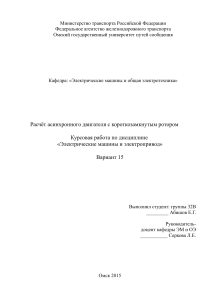
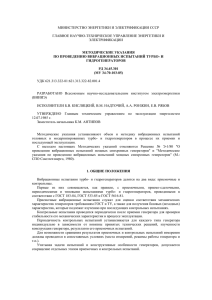
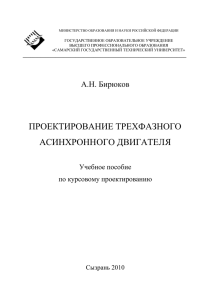
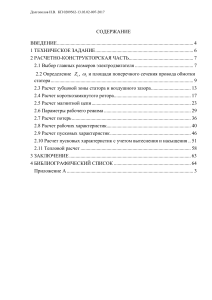
МОДЕЛИРОВАНИЕ СИЛОВЫХ ЧАСТЕЙ ЭЛЕКТРОПРИВОДА ВАГОНООПРОКИДЫВАТЕЛЯ Троян Д.И., СПГУВК Вагоноопрокидыватель является наиболее производительным средством разгрузки полувагонов. Электропривод механизма поворота вагоноопрокидывателя представляет сложную электромеханическую систему, главной частью которой является электродвигатель. Моделирование электрической части электромеханического преобразователя (ЭМП) позволяет изменить характер динамических процессов и снизить нагрузку на электродвигатель, что приводит к уменьшению времени переходного процесса, увеличению быстродействия системы и повышению производительности всей машины в целом. При моделировании электропривода вагоноопрокидывателя возможно применение математической модели в виде обобщённой двухполюсной двухфазной электрической машины. Обобщённая машина имеет по две обмотки на статоре и роторе, которые сдвинуты в пространстве на угол 90 (рис.1). Если такие обмотки питать переменными токами i и i , сдвинутыми во времени на 90 , то в воздушном зазоре будет создаваться круговое вращающееся магнитное поле. На рис.1. приведены оси координат, совпадающие с осями обмоток. Оси и связаны с обмотками статора и неподвижны в пространстве, а оси d и q вращаются вместе с ротором. Пусть синусоидальные потокосцепления обмоток статора равны по величине и сдвинуты по фазе на угол 90 . При этом: m sin 1t m sin 1t m cos 1t . 2 1 Re (+1) i1 i q q d d i Im( j) Рис.1. Схема обобщённой электрической машины В пространстве каждое потокосцепление может быть представлено вектором, направление которого совпадает с осью соответствующей обмотки. Результирующее потокосцепление статора образуется одновременным действием двух обмоток, расположенных соответственно на осях и и может быть представлено векторной суммой 1 . Поскольку векторы и расположены по ортогональным осям, модуль вектора потокосцепления статора 1 2 2 m sin 2 1t cos2 1t m . Таким образом, в симметричной магнитной системе модуль результирующего вектора не зависит от времени и является величиной постоянной, равной амплитуде потокосцеплений в обмотках статора. Сложим вектора и , воспользовавшись комплексной формой записи. Мнимую ось Im совместим с осью , действительную ось Re – с осью , тогда: 1 m cos 1t j m sin 1t 1 e j , t . Умножение вектора на величину e j означает его поворот на угол . Если угол изменяется с постоянной скоростью, то вектор 1 не изменяется во времени, но вращается в пространстве с постоянной угловой скоростью, численно равной угловой частоте тока статора: 0 1 2f1 . Таким образом, две неподвижные обмотки статора, питаемые переменными токами i и i , можно заменить одной эквивалентной I1 . вращающейся обмоткой, питаемой постоянным током Потокосцепление этой эквивалентной обмотки равно результирующему потокосцеплению, которое постоянно во времени и вращается вместе с эквивалентной обмоткой статора с постоянной скоростью 0 . Цель применения результирующих упрощении математического описания. векторов заключается в Если приложить внешнее напряжение к обмотке, то оно должно уравновесить ЭДС и падение напряжения на сопротивлении обмотки. На основании второго закона Кирхгофа для мгновенных значений напряжения, тока и ЭДС получим: u Ri e . Запишем это уравнение в виде пространственных векторов: URI . t (1.1) Если пространственные векторы выражены в комплексной форме, то U RI d j . dt (1.2) На основании уравнения (1.2) для эквивалентной обмотки статора и ротора получена система уравнений: d1 U1 R1I1 dt j0 1 . d U R I 2 j 1 2 2 2 dt Математическая модель (1.3) двухфазной электрической машины. (1.3) даёт описание обобщённой На рис. 3 и рис. 4 представлены кинематическая и расчётная схемы механической части вагоноопрокидывателя. Рис. 2. Кинематическая схема механизма опрокидывания: 1 – зубчатый венец; 2 – командоаппарат; 3 – шестерня; 4 – промежуточный вал; 5 – тормоз; 6 – муфта; 7 – редуктор; 8 – электродвигатель «подачи»; 9 – электродвигатель «выдачи». Рис. 3. Расчётная схема: Jш1, Jш2, Jш3, Jш4 – приведённые моменты инерции зубчатых шестерён; Jв1, Jв2, Jв3, Jв4 – приведённые моменты инерции венцов; Jп, Jв – суммарные моменты инерции электродвигателей «подачи» и «выдачи»; Мп, Мв – моменты, создаваемые электродвигателями «подачи» и «выдачи»; Cш1,п; Cп,ш2; Cш2,ш3; Cш3,в; Cв,ш4; Cв1,в2; Cв2,в3; Cв3,в4 – упругости между элементами системы; Mш1,п; Mп,ш2; Mш2,ш3; Mш3,в; Mв,ш4; Mв1,в2; Mв2,в3; Mв3,в4 – моменты упругих элементов; βш1, βп, βш2, βш3, βв, βш4, βв1, βв2, βв3, βв4 – коэффициенты демпфирования вращающихся масс; βш1,п; βп,ш2; βш2,ш3; βш3,в; βв,ш4; βв1,в2; βв2,в3; βв3,в4 – коэффициенты демпфирования упругих элементов. Для анализа механической системы используем понятие механического сопротивления. Под механическим сопротивлением будем понимать отношение операторных изображений крутящего момента к угловой скорости соответствующего элемента. Z мех P Z P M P ( P) Значок «~» будет отличать механическое сопротивление от электрического сопротивления. Создание математической модели узлов и элементов конструкции, позволяет оценить нагрузки, возникающие в элементах механизма, это даёт возможность прогнозировать отказы, выявлять причины, приводящие к аварийному режиму, давать рекомендации по изменению конструкции, технологии обслуживания, ремонта и эксплуатации. Список литературы 1. Саушев А. В. Математическое описание механической системы электропривода: учеб. пособие. – СПб.: СПГУВК, 2010. – 137 с. 2. Ковчин С.А., Сабинин Ю.А. Теория электропривода: учебник для вузов/ С.А Ковчин, Ю.А. Сабинин. - СПб.: Энергоатомиздат, 2000.496с. 3. Ключев В.И. Теория электропривода: учебник для вузов / В.И. Ключев. – М.: Энергоатомиздат, 2001.- 704с. 4. Самосейко В.Ф. Теоретические основы управления электроприводом: Учебное пособие. – СПб.: Элмор, 2007. – 464с., илл.