Миллиметровые волны низкой интенсивности относятся к
реклама

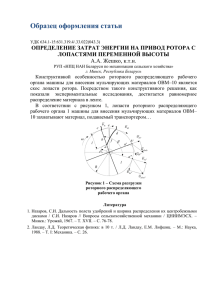
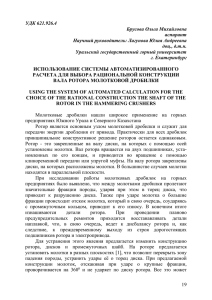
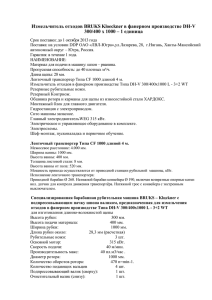
130 Вестник Нижегородского университета Лобачевского, Ф.М. Митенков,им. Е.Ф.Н.И. Сабаев, Т.А. Сабаева 2007, № 1, с. 130–136 МЕХАНИКА УДК 539.3 О СТАЦИОНАРНЫХ ДВИЖЕНИЯХ РАСПРЕДЕЛЕННОЙ И ДИСКРЕТНОЙ МОДЕЛЕЙ РОТОРА НА ЭЛЕКТРОМАГНИТНОМ ПОДВЕСЕ 2007 г. Ф.М. Митенков 1, Е.Ф. Сабаев 2, Т.А. Сабаева 2 1 ФГУП «ОКБМ им. И.И. Африкантова», Нижний Новгород 2 Нижегородский госуниверситет им. Н.И. Лобачевского [email protected] Поступила в редакцию 25.12.2006 Рассмотрен ротор, вывешенный в поле силы тяжести на электромагнитных подшипниках. За основу математической модели взяты распределенные уравнения ротора на механических подшипниках, преобразованные для данного случая. Ротор считается уравновешенным, а в качестве несовершенства конструкции принято, что пластины ротора и статора, непараллельные друг другу, развернуты на малый угол. Радиальные подшипники идеализируются граничными условиями, соответствующими шарнирному закреплению. Исследуются только стационарные круговые движения. В этом случае уравнения 8-го порядка свертываются в одно уравнение 2-го порядка. Получены точные решения с учетом угловых и поступательных движений. Из распределенных уравнений получено решение для ротора с одним диском. Показано, что решение устойчиво до первой резонансной частоты. При переходе через первую резонансную частоту появляется зона неустойчивости. По-видимому, зона неустойчивости сдвинута ко второй резонансной частоте за счет сил трения, вносимых радиальными подшипниками. В предельном случае зоны неустойчивости могут возникать за каждой нечетной резонансной частотой. Системы электромагнитного подвеса находят широкое применение в промышленности благодаря отсутствию трения и механического износа элементов подвеса, а также отсутствию загрязнения контура циркуляции и затрат на обеспечение систем смазки. С точки зрения динамики, всем роторным системам присуще наличие вибраций и, при некоторых параметрах, зон неустойчивости. Обширную библиографию работ по механическим роторам с механическими подшипниками можно найти в [1]. Из работ по электромагнитному подвесу укажем работы [28]. Ниже исследуются резонансные частоты распределенного ротора на магнитном подвесе. В качестве математической модели взяты уравнения распределенного ротора из работы [1], из которых получены уравнения одномассового ротора. Для этого случая при больших уводящих моментах осевого электроподшипника в линейном приближении обнаружена зона апе- риодической неустойчивости. В условиях минимакета, исследованного в ФГУП «ОКБМ им. И.И. Африкантова», апериодической неустойчивости не обнаружено [8], что легко объясняется малостью параметра Ml/(EJ) 1, где M коэффициент при моменте осевого подшипника, l длина вала, EJ изгибная жесткость. Однако в условиях промышленных роторов на магнитном подвесе, особенно при большом весе ротора (до 1000 Н), этот параметр может быть велик. Основное внимание уделено исследованию прямой прецессии, при которой ротор вращается вокруг своей оси и вокруг вертикальной оси с той же частотой. Для этого случая получено аналитическое решение. При вывешивании вертикальных валов используются два вида электроподшипников: осевые обозначаются как ОЭМП, а радиальные – РЭМП. Оба вида подшипников являются О стационарных движениях распределенной и дискретной моделей ротора управляемыми и характеризуются силой тяжения и моментом. Наличие момента создает дополнительные затруднения как при расчете, так и при проведении пусконаладочных работ. Поэтому создание безмоментных подшипников является желательным. Рассмотрим вначале ОЭМП (рис. 1). Положение ротора задается отклонением оси от вертикали и средним расстоянием ротора от статора x0 – x, x0 – номинальный зазор, x – отклонение. Сила тяжения (в дальнейшем пренебрегается перемещениями по высоте): F0 R 2 BH , F0 P при x 0 , ( x0 x )2 R радиус ротора, B магнитная индукция, H напряженность магнитного поля, P вес вала, момент (для малых отклонений по вертикали): M 2 R 2 4 x 0 r 3 drBH cos 2 d ( x 0 x) 2 0 R 2 BH 2 x 03 F0 можно принять условия равенства нулю отклонения и первой производной отклонений. В случае 1 подшипник (РЭМП) также создает момент и силу тяжения. Подсчитаем силу тяжения FR и момент MR для РЭМП. Обозначим через RR радиус ротора, d0 – номинальный зазор, lR – длина ротора, d – отклонение от вертикали, угол (рис. 3). Тогда FR R2 . 2 x0 Предполагается, что BH/(2x0) = const. Тогда для вывешивания ротора большого веса остается единственный путь – увеличение R. Так, если Р = 14 кг, R = 13 см, x0 = 0,4 мм., то при переходе к весу вала 14 кН требуется размеры статора и ротора увеличить в 10 раз, то есть R будет 1,3 м, что уже близко к предельно возможному хотя бы из-за температурных искажений поверхности ротора и статора. Теперь рассмотрим ЭМП, его схема приведена на рис. 2. Если измерители расположены в точках А и В, то возможны следующие три варианта управления током в катушках ЭМП: 1) iупр=khA , как принято в минимакете; 2) iупр=k(hA+ hВ); 3) вместо одной обмотки можно разместить две – верхнюю и нижнюю, на верхнюю подать ток пропорционально отклонению в точке А, а в нижнюю пропорционально отклонению в точке В. В случае 3 подшипник можно сделать безмоментным. В случае 2 при размещении подшипников на концах вывешиваемого вала можно граничные условия приближенно записать как для шарнирного закрепления, то есть значение отклонения в точке и вторую производную приравнять нулю и добавить моменты в концевых точках. В случае безмоментного подшипника (случай 3) в качестве граничных условий 2HBl R RR . d 02 Изменение воздушного зазора параллельно оси х из-за поворота ротора будет d0 – d, проекция на радиус-вектор равна d0 – 2cos dl/lR, поле в зазоре В, Н, Н(iупр), B =H на линейном участке. Таким образом, lR 131 d 8d0lR RR BH (i) cos 2 MR dl d . d04 0 2 2 2 Отсюда имеем l R2 M R FR , d0 2d . lR Замечание. В случае 1, как и в случае 2, тоже не измеряется, то есть не участвует в управлении током через обмотку магнита. Таким образом, граничные условия для достаточно жесткого вала будут теми же самыми, что и в случае 2, только в другой точке. Теперь рассмотрим вывешенный с помощью электроподшипников ротор массой m, длиной l. За основу возьмем уравнения движения, приведенные в работе [1]. Для свободного от опор и внешних воздействий вала линия, проходящая через центры тяжести поперечных сечений, называется осью жесткости, а линия, проходящая через центры масс поперечных сечений, называется осью инерции. Отклонение этих осей друг от друга определяет неуравновешенность ротора. Ниже рассматривается изотропный уравновешенный ротор. В таком роторе все оси инерции поперечных сечений являются главными. Ротор может иметь переменную по длине жесткость EJ, распределенную массу M(x), одинаковые относительно осей y, z экваториальный и полярный моменты инерции i(x) и i0(x) относительно оси х. Распределенными по длине реактивными нагрузками с коэффициентами Cyy, Cyz, Czy, Czz при перемещениях пренебрегается. Аналогично Ф.М. Митенков, Е.Ф. Сабаев, Т.А. Сабаева 132 Катушка ЭМ Вал РЭМП 1 Верхний статор Вал ОЭМП Нижний статор Ротор РЭМП 2 Рис. 1. ОЭМП (в разрезе) Рис. 2. Схематическое изображение ротора пренебрегается и распределенными моментными нагрузками при угловых перемещениях. Силы внутреннего трения учитываются. Будем считать, что ротор нагружен по длине векторной силовой нагрузкой p = = (py, ,pz) и моментной нагрузкой l =(ly, lz). Деформированное состояние в каждом сечении описывается вектором перемещений u = (uy, uz), углом поворота сечения = (y, z) и силовыми параметрами: поперечной силой Q = (Qy, Qz) и изгибающим моментом M = (My, Mz). Дифференциальные уравнения движения ротора имеют в нашем случае вид: для поступательных перемещений m 2u y Q y M y z Qz l y , t 2 t x y 2 M z i 2 z i0 Qy lz , t t x i i0 где y z u z , x 2 y y M y EJ f z xt x x , u y 2 z y z M z EJ f x x xt . x , f( t 2 2u y x t 2 m f( 2u z t 2 2u z x t 2 [ EJ x 2 2u z x x 2 )] 2 2 x 2 [ EJ 2u y x 2u y 2 l z py , x 2u z x 2 )] l y x (1) pz , где l y M ( y y ) ( x c) M (u z y ) ( x c), для угловых перемещений 2 y m 2 l z M ( z z ) ( x c) M (u y z ) ( x c), py , t x 2 u Q m 2z z p z , t x 2 2u y Если пренебречь инерцией угловых перемещений и реакцией основания, то уравнения ротора принимают вид: p y p z 0, то есть учитывается только момент, создаваемый подшипником ОЭМП. Здесь z и y – несовершенство подшипника, а (х) – функция Дирака. Далее ограничимся исследованием прямой прецессии ротора, то есть полагаем uy = uсost, uz = usint. При таком движении ротор сохраняет в подвижной системе координат свою форму. Следовательно, силы внутреннего трения не работают, поэтому исследование такого типа движения представляется важным. В результате подстановки uy = ucos t, uz = usin t уравнения спрессовываются в одно уравнение m u 2u 2 2u EJ M 2 2 2 t x x x ( x c ). x c О стационарных движениях распределенной и дискретной моделей ротора 133 Вал Магнит РЭМП Вид сбоку Вид сверху в разрезе Рис. 3 Как было показано выше, R2/(x0l) >> 1 (момент, создаваемый осевым подшипником, много больше стабилизирующего момента силы тяжести), поэтому требуется установка радиальных подшипников. Ввиду того, что момент радиальных подшипников мал, их действие на ротор будем отображать соответствующими граничными условиями. Для случаев 1 и 2 управления ими граничные условия будут: u (0) u(0) u (l ) u(l ) 0 (для случая расположения на верхнем и нижнем конце). Для некоторого упрощения задачи массу ротора сосредоточим в его центре по высоте: 2 2 u EJ M (u (c) ) ( x c) x 2 x 2 m 2 x l l u . 2 2 B Ml (u (c) ) (6cl 3c 2 2l 2 ) 2 EJ 6l m 2 l 2 l u . EJ 16 2 Из равенства c2 m 2 l l u(c) A B c u , 2 2 EJ 2 2 2 находим 3 m 2l 2 l 1 u( c) u . 2 1 7 / 48 Ml EJ 64 EJ Отсюда видно, что поскольку Ml/EJ = 1,08 мало, то влияние ОЭМП в условиях минимакета несущественно, u(l/2) находится из равенства l 2 Bl l u A 48 2 2 Найдем решения этого уравнения с указан- или ными выше краевыми условиями. Так как част l 2 Bl 3 m 2 l 2 l IV l ные решения однородного уравнения u xx 0 u A u 48 2 64 EJ 2 2 имеют вид: u = 1; x; x2/2; x3/6, то решение будем искать в виде: 1 M (u x ) ( x c) 2 x3 uA Bx 6 EJ 2 m 2 x l 23 l u . EJ 6 2 Очевидно, что условия при x = 0 выполняются. Из условий при x = l находим постоянные А и В, затем находим u(c) и ul 2 : A Ml (u (c) ) m 2 u l 2 , EJ EJ 2 l2 1 7 / 48 Ml EJ 3 Ml 1 m 2 l Ml 3 . 64 EJ 48 EJ (2) Заметного влияния ОЭМП на колебания ротора минимакета не оказывает (Ml/EJ = 1,08). Рассмотрим случай, когда ОЭМП оказывает существенное влияние на колебания вала. Пусть вес увеличен в 100 раз. Для того, чтобы вывесить такой вал, увеличим радиус в 10 раз, длину вала увеличим в 2 раза, а поперечные размеры Ф.М. Митенков, Е.Ф. Сабаев, Т.А. Сабаева 134 трубки вала в 2 раза. Тогда параметр Ml/(EJ) будет составлять величину 28,1 и 3 m 2 l 2 3 1 u u l 28,1 64 EJ 1 4,05 64 Отсюда имеем A M 6c(l c) 1 m 2 (c) ) ( u u, EJ 2 EJ l3 B M (l c)(l 3c) 1 m 2 (c) ) ( u lu . EJ 8 EJ l2 1 m 2l 3 u. 48 EJ Далее определяем ul / 2 и u(c) Из уравнения (1) следует, что при Ml/EJ = c2 m 2 l 2 48/7 6,3 знаменатель обращается в нуль и амu(c) A Bc , 2 EJ 32 плитуды отклонений возрастают до . Такие параметры будем называть критическими. Зна- или чение 2 резонансной частоты вращения делаM u(c) (u(c) ) (3c3 (l c) l 3 ется минимальным, что указывает на апериодиEJ ческую неустойчивость ротора. При = 0 уравc нение (2) является линейным и, если сделать (l c)(1 3c) 2 ) l подстановку uy=etucos t, uz=etusin t в исходных уравнениях (1), то при = 0 приходим к характеристическому уравнению вида 1 c( 2 2 ) , где с – коэффициент при 2 в уравнении (2). Из этого уравнения находим 2 = 2 – 1/c. Рассматриваемая система является консервативной и для устойчивости необходимо, чтобы 2 < 0, то есть при с > 0 одномассовый ротор при частоте вращения 2 > 1/c устойчиво вращаться не может. Если с < 0, то на любых частотах 0 ротор будет неустойчивым. Теперь рассмотрим одномассовый ротор с безмоментными РЭМП. Уравнения движения в этом случае будут отличаться, согласно вышеизложенному, только краевыми условиями в точках расположения радиальных подшипников. Принимая, что радиальные подшипники расположены на концах ротора, граничные условия будут такими: u (0) u(0) 0 и u (l ) u(l ) 0 . Решение ищем в виде uA x3 x 2 M ( x c) 2 B (u ) 6 2 EJ 2 m 2 x l / 23 l u . EJ 6 2 Уравнения для определения А и В имеют вид: l3 l2 M (l c) 2 m 2 l 3 l A B (u ) u , 6 2 EJ 2 EJ 48 2 l2 M m 2 l 2 l A Bl (l c)(u ) u . 2 EJ EJ 8 2 M 2 l 2 c 2 lc l ( )u( ), EL 32 4 8 2 3 Bl 2 l Al u 8 2 48 m 2 l 2 l 1 Ml l u 64 EJ 2 1 21 256 Ml EJ EJ 64 m 2 l 3 1 u . EJ 256 2 По сравнению с минимакетом увеличилось значение (Ml/EJ)крит и остальные коэффициенты также увеличились. Сравним резонансные частоты: 256 EJ Ml = 0, 2 = (150 Гц /2). m t3 EJ Выводы Из проведенного исследования можно сделать следующие выводы: 1. Влияние ОЭМП на динамику ротора сильно зависит от безразмерного параметра PR 2l l Ml . 2 x0 EJ EJ При aML/EJ > 1, но близких к единице, одномассовый ротор неустойчив. 2. Коэффициент а зависит от точек расположения сосредоточенной массы и ОЭМП. Так, при граничном условии u u 0 коэффициент a = 7/48, а при граничном условии u u 0 a = 21/256 7/85. О стационарных движениях распределенной и дискретной моделей ротора Рассмотрим однородный круговой вал весом 640 Н и длиной 30 м, радиусом 30 см, вывешенный в поле силы тяжести на магнитных подшипниках, с параметрами ОЭМП: радиус ротора 70 см, зазор 0,5 мм, длина магнитопровода L = 20 см. Для такого ОЭМП сила тяжения Р = = 64 т, P BHS x0 L 2 , Ml/EJ = 6,4 (при В = 510 Гс, Н = 5 Э). Уравнения движения при прямой прецессии ненамного отличаются от приведенных ранее из-за учета инерции угловых перемещений 3 u 4 EJ x 4 i 2 u 2 x 2 Коэффициенты А, В находятся из граничных условий на другом конце ротора (граничные условия одни и те же). A M (u ) chk1 (l x 0 ) EJ (k12 k 22 )shk1l B k иk 2 k22 m 2 i 2 4 i 2 0. EJ 4( EJ ) 2 2 EJ Заметим, что i = 2i0, i0=mR /4=i. Для малых k12 k 22 2 k1 k2 m 2 EJ , что соответствует пренебрежению инерцией угловых перемещений. Для больших 2 k 2 4 R 2 mR 2 2 (4 EJ ) . Частные решения однородного уравнения имеют вид: chk1x, shk1x, sink2x, cosk2x. Из этих частных решений составим уравнение для u, удовлетворяющее граничным условиям u(0) u(0) 0 на левом конце. Решение запишется так: u=Ash k1x + Bsin k2x, если x x0 (x0 – точка расположения ОЭМП), u Ashk1 x B sin k 2 x M (u ) chk1 ( x x 0 ) cos k 2 ( x x 0 ) , k12 k 22 если x > x0 . cos k2 (l x0 ) cos k2 x0 )} . sin k2l вместе с u x . Следовательно, резонансные частоты находятся из равенства 2 2 k1 chk1 (l x 0 )chk1 x 0 k2 shk1l пропорциональны u x , то u обращается в где k1 0 и k2 0, m i 4 i 2 0, EJ 4( EJ ) 2 2 EJ k1 4 R 2 , ( k2 M 2 EJ k1 k 22 k22 , k12 2 . Поскольку все величины в выражении для u Отсюда находим: k12 EJ (k12 k 22 ) sin k 2 l u x M (u ) ( x x0 ) m 2u , 2 M (u ) cos k 2 (l x0 ) {1 EJk 4 i 2 k 2 m 2 . , Далее находим где i – разность экваториального i и радиального i0 моментов инерции вала, m – погонная масса вала. Характеристическое уравнение имеет вид: 135 chk1 (l x 0 )chk1 x 0 M ( k1 EJ shk1l cos k 2 (l x 0 ) cos k 2 x 0 ). sin k 2 l Составим безразмерное отношение для рассматриваемого вала: k2 m 2l 4 (mR2 ) 2 4l 4 1 2 1010 2 . 2 EJ 64 EJ Отсюда находим, что поправка мала вплоть до частот 2 = 108, f = 104/2 103 Гц. Таким образом, можно положить k12 k22 m 2 EJ , а этот случай подробно исследован в работе [9]. Заключение Аналитически исследована прямая прецессия вертикального вала, вывешенного в поле силы тяжести с помощью одного осевого и двух радиальных электромагнитных подшипников. Показано, что при больших опрокидывающих моментах осевых электромагнитных подшипников существенно их влияние на динамику такого рода устройств. В отличие от влияния дисбалансов, при некоторых значениях частоты вращения ротора появляются зоны апериодиче- 136 Ф.М. Митенков, Е.Ф. Сабаев, Т.А. Сабаева ской неустойчивости. Динамика устройств определяется параметрами Ml/EJ, l, R2/[(x0+L/)]. Влияние инерции сечений при угловых перемещениях сравнительно невелико на первых резонансных частотах. Список литературы 1. Вибрации в технике: Справочник. Т. 3 / Гл. ред. В.Н. Челомей. – М.: Машиностроение, 1980. – 543 c. 2. Брюне, М. Применение активных магнитных подшипников в турбокомпрессорах и турбодетандерах газовой промышленности / М. Брюне, И. Детомб // Компрессорная техника и пневматика. – 2001. №7. С. 1719. 3. Верещагин, В.П. Особенности электромагнитных подшипников магистральных газопроводов / В.П. Верещагин, П.А. Матвейчук, А.П. Сычев // Электротехника. – 1999. № 6. С. 32–35. 4. Денисов, Г.Г. Экспериментальное исследование колебаний безопорного вращающегося вала: В сб. ст.: Теория машин и механизмов / Г.Г. Денисов, Ю.И. Неймарк, Ю.И. Поздеев, Ю.В. Цветков. – М.: Машиностроение, 1969. 5. Куинджи, А.А. Автоматическое уравновешивание роторов быстроходных машин / А.А. Куинджи, Ю.А. Колосов, Ю.И. Народницкая. – М.: Машиностроение. – 1974. 6. Лучин, Г.А. Создание магнитных опор для роторов турбомашин / Г.А. Лучин // Энергетическое машиностроение (НИИЭинформэнергомаш). – 1982. №3 (2 82-03). 7. Пюнье, Ж.-М. Технологические центробежные компрессоры, оснащенные активными магнитными подшипниками /Ж.-М. Пюнье, А. Желен, Д. Блюссе // Химическое и нефтегазовое машиностроение. – 1999. – № 5. С. 16–20. 8. Комплекс расчетно-методических и экспериментальных исследований движения ротора на электромагнитном подвесе /Ф.М. Митенков [и др]. //Атомная энергия. – 2005. Т. 99, вып. 1. – С. 26 33. 9. Митенков, Ф.М. О резонансных частотах вывешенного на электроподшипниках твердого тела / Ф.М. Митенков, Е.Ф. Сабаев, Т.А. Сабаева // 7 науч. конф. по системам мехатроники. Циттау, сентябрь 2005. ON STATIONARY MOVEMENTS OF THE DISTRIBUTED AND DISCRETE MODELS OF A ROTOR ON AN ELECTROMAGNETIC BEARING F.M. Mitenkov, E.F. Sabaev, T.A. Sabaeva We consider a rotor hung on electromagnetic bearings in a gravity field. The mathematical model is based on the distributed equations for a rotor on mechanical bearings. These equations are appropriately modified to describe the considered system. The rotor is considered to be perfectly balanced. As for the imperfection of the system, we assume that the rotor and stator plates are slightly nonparallel and make a small angle with respect to each other. The radial bearings are described by the boundary conditions corresponding to a joint-type fixing. We analyze only stationary circular movements. In this case, the equations of the 8th order are reduced to one second-order equation. Exact solutions with allowance for the angular and translational movements are obtained. A solution for a single-disk rotor is obtained for the distributed equations. It is shown, that this solution is stable up to the first resonance frequency. An instability zone appears above the first resonance frequency. The instability zone is shifted toward the second resonance frequency due probably to the friction forces stipulated by the radial bearings. In the limiting case, the instability zones can arise above each odd resonance frequency.