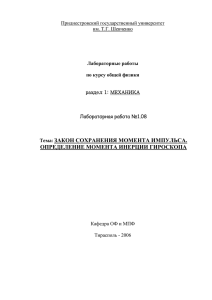
Рисунок 1 – Схема трехстепенного гироскопа в кардановом
реклама

Серия изданий «Научно-образовательные и научно-информационные материалы МГТУ им. Н.Э. Баумана — национального исследовательского университета техники и технологий» Департамент образования города Москвы Ассоциация московских вузов Московский государственный технический университет имени Н.Э. Баумана Научно-учебный комплекс «Информатика и системы управления» В.А. Матвеев Лекция для абитуриентов и студентов на I Всероссийском Фестивале Науки в МГТУ имени Н.Э. Баумана «Гироскоп – это просто!» Москва МГТУ им. Н.Э. Баумана 2011 В последнее время развитие авиации, включая создание современных беспилотных аппаратов, тактического ракетостроения, автомобильного транспорта, робототехники, малых космических летательных аппаратов и др. потребовало создания нового поколения миниатюрных гироскопов для систем ориентации, стабилизации и навигации. Получившие название микромеханические гироскопы (ММГ) обладают малыми массой и габаритными характеристиками, имеют малое время готовности, высокие надежность и срок службы, малые энергетические затраты и низкую стоимость. Практически все развитые страны: США, Франция, Япония, Китай и др. в настоящее время производят ММГ, различающиеся конструктивным исполнением, точностью и стоимостью. При разработке и производстве ММГ используются достижения вычислительной техники, микроэлектроники, применяются новейшие технологии, в частности, связанные с применением монокристаллического кремния, используются автоматизированные системы разработки и изготовления, а при эксплуатации применяются современные системы коррекции выходной информации ММГ. История гироскопии начинается с известных опытов Л. Фуко, который с помощью быстровращающегося ротора, помещенного в кардановый подвес, экспериментально показал наличие суточного вращения Земли. Отсюда и возникло у автора само название такого устройства – гироскоп, что означает по-гречески «гиро» - вращение, «скопео» - наблюдаю. Одно из первых определений гироскопа – это быстровращающийся ротор, имеющий одну неподвижную точку, а эллипсоид инерции которого есть эллипсоид вращения. Важнейшей характеристикой гироскопа является собственный кинетический момент Н гироскопа, который равен произведению полярного (осевого) момента инерции С ротора на его угловую скорость собственного вращения, т.е. Н=С . Начиная с 30-х годов XX века в качестве привода ротора наиболее часто применяются электрические двигатели (гиродвигатели): асинхронные, синхронные гистерезисные, вентильные на постоянном токе и др. Синхронный и вентильный гиродвигатели обеспечивают высокое постоянство угловой скорости . Трехстепенной гироскоп (рис. 1) обладает замечательными свойствами. Первое свойство трехстепенного гироскопа: трехстепенной гироскоп сохраняет свое первоначальное положение в инерциальном пространстве неизменным (положение относительно инерциальной (абсолютной) системы координат ) при отсутствии внешних моментов . С помощью гироскопа можно реализовать на подвижном объекте некоторую базовую систему координат (СК), относительно которой можно определять ориентацию объекта в инерциальном пространстве. Второе свойство трехстепенного гироскопа – свойство прецессии гироскопа, которое заключается в реакции гироскопа на внешний момент. Свойство прецессии: под действием внешнего момента гироскоп прецессирует так, что стремится совместить вектор кратчайшим путем с вектором внешнего момента с угловой скоростью (скоростью прецессии) в инерциальном пространстве: (1) Рисунок 1 – Схема трехстепенного гироскопа в кардановом подвесе 1 – ротор; 2 – внутренняя рамка подвеса; 3 – наружная рамка подвеса; 4 – опоры ротора – «главные» опоры гироскопа; 5, 6 – опоры рам карданова подвеса – «чувствительные» опоры гироскопа; 7 – индикатор, жестко связанный с осью наружной рамы 3 и шкала, установленная на корпусе прибора (датчик угла); O – инерциальная система координат (СК); Ox1 y1z1 – СК, связанная с наружной рамой 3; Oxyz – СК, связанная с внутренней рамкой 2 – система осей Резаля; M M y1 – внешние моменты, действующие вокруг осей Oy1 и Ox карданова подвеса. Из (1) следует, что при М=0 , т.е. гироскоп сохраняет свое положение в инерциальном пространстве неизменным (первое свойство гироскопа). При снятии момента гироскоп останавливается , т.е. прецессия – «безынерционное» движение (ср. с твердым телом =M, где B – момент инерции; при М=0, , т.е. движение тела по инерции с постоянной скоростью). Отсюда возникает возможность «безынерционного» управления гироскопом: , (2) где – скорость управления; – момент управляющего устройства гироскопом (например, c помощью датчика момента). Соотношение (1) используется для оценки точности гироскопа. Под действием вредных (возмущающих) моментов гироскоп прецессирует со скоростью: , где – скорость дрейфа («ухода») гироскопа или собственная скорость прецессии; – вредные (возмущающие) моменты, действующие вокруг осей карданова подвеса. Скорость дрейфа характеризует точность гироскопа и имеет размерность , соответственно отклонение, дрейф («уход») или погрешность гироскопа где t – время эксплуатации, в часах, минутах, секундах; – угол в градусах, угловых минутах, угловых секундах, характеризующий погрешность измерения углов ориентации объекта, на котором установлен гироскоп. Рассмотрим для наглядности принцип измерения курсового угла с помощью идеального ( ) трехстепенного гироскопа при движении судна на Северном полюсе. Угол отсчитывается с помощью датчика угла 7 (ДУ), укрепленного по оси наружной рамы подвеса (рис. 1). Стрелка ДУ (или ротор ДУ) закреплена на оси наружной рамы, а шкала (или статор ДУ) жестко связана с корпусом объекта. При повороте объекта на угол шкала разворачивается относительно гироскопа на этот угол, поскольку сохраняет неизменное положение в инерциальном пространстве (гироскоп реализует в данном случае инерциальную СК). Наиболее часто применяют потенциометрические, индукционные, индуктивные и другие электрические ДУ, напряжение с которого , здесь – крутизна выходной характеристики ДУ по напряжению; в дальнейшем будем условно изображать ДУ в виде цилиндра. При оценке погрешности измерения курса относительно Земли необходимо учитывать ее суточное вращение с угловой скоростью , где t – время измерения. Наличие вредных моментов приводит к дополнительной погрешности, обусловленной собственной скоростью прецессии (ССП), при : , где , здесь – вредный момент, действующий вокруг оси Ox внутренней рамки подвеса. Например, t = 1час, , тогда . Видно, что так называемый «кажущийся уход» гироскопа 15 , обусловленный вращением Земли, значителен. Поэтому его необходимо компенсировать, например, учесть при обработке выходной информации с ДУ или приложить к гироскопу управляющий момент . В случае идеальной компенсации кажущегося ухода . Свойства гироскопа объясняются действием кориолисовых сил инерции. Рассмотрим быстровращающийся ротор 1 в корпусе (кожухе) 2, который имеет переносную угловую скорость (рис. 2). Рисунок 2 – К выводу формулы гироскопического момента Выделим элементарную массу ротора: где – плотность; – приращения; r – радиус; ра; R, h – радиус и высота ротора. – угол поворота рото- Кориолисово ускорение элементарной массы . Элементарная кориолисова сила инерции является причиной возникновения моментов вокруг осей, связанных с корпусом 2 (СК Oxyz - оси Резаля): ; Заменяя приращение получим: и дифференциалами и и интегрируя, ; Момент кориолисовых сил инерции называется гироскопическим моментом. Правило определения гироскопического момента: вектор гироскопического момента направлен таким образом, что с его конца видно совмещение вектора с вектором переносной угловой скорости кратчайшим путем против часовой стрелки; модуль величины гироскопического момента при равен произведению кинетического момента Н на угловую переносную скорость (рис. 3а, б). Рисунок 3 – К определению гироскопического момента а) e Vr , б) e Vr Если между имеется угол (рис. 3в), то по правилу гироскопического момента при ; иными словами вектор гироскопического момента равен векторному произведению: (3) Наличие гироскопического момента объясняет свойство прецессии: под действием внешнего момента гироскоп прецессирует с угловой скоростью в направлении перпендикулярном вектору , поскольку вокруг оси Ox возникает динамическое равновесие: где . Откуда определяется скорость прецессии (1): . (4) Используя различные способы управления гироскопом, можно реализовать заданные системы координат на движущемся объекте и определять положения объекта в заданной СК (например, курс, тангаж, крен). Для этого надо обеспечить заданную скорость управления , где – управляющий момент, создаваемый, например, датчиком момента. Наличие гироскопического момента объясняет свойства и двухстепенного гироскопа (рис. 4). Рисунок 4 – Двухстепенной гироскоп а) с «открытой» рамкой 1, б) с «закрытой» рамкой (кожухом), в котором вращается ротор 1 Если двухстепенной гироскоп установлен на вращающемся основании с угловой скоростью (в начальный момент ), то возникает гироскопический момент . Под действием гироскопического момента гироскоп поворачивается вокруг оси Ox до тех пор, пока не совместится с ( ; ); это устойчивое положение двухстепенного гироскопа. При наличии упругой связи 3 с корпусом (рис. 5) гироскопический момент уравновешивается упругим моментом : Рисунок 5 – Схема датчика угловой скорости (5) где К – приведенная угловая жесткость упругой связи 3. Тогда , то есть угол поворота гироскопа является мерой угловой скорости основания. Для успокоения колебаний гироскопа применяется демпфирующее устройство 4. Выходной сигнал снимается с помощью датчика угла (ДУ) 5, здесь – крутизна выходной характеристики ДУ. Такие гироприборы называют датчиками угловой скорости (ДУС), гиротахометрами, дифференцирующими гироскопами и служат для измерения угловой скорости объекта, на котором они установлены. Если гироскопический момент уравновешивается только демпфирующим моментом, то двухстепенной гироскоп становится интегрирующим гироскопом (ИГ): , где D – удельный коэффициент демпфирования. При малых и нулевых начальных условиях: ; , (6) где – угол поворота объекта вокруг оси . Заметим, что точность поплавковых прецизионных интегрирующих гироскопов достигает 10-4 град/ч. Большие массогабаритные характеристики, высокая стоимость, большое время готовности, недостаточный срок службы являются существенными недостатками гироприборов с быстровращающимся ротором. В 60-х годах XX века начинается интенсивный поиск гироскопов, построенных на иных физических принципах; «камертонные», оптические, волновые твердотельные, микромеханические и другие гироскопы. Одной из первых конструктивных схем явилась схема камертонного вибрационного гироскопа (рис. 6). Рисунок 6 – Схема камертонного гироскопа а) 1 – камертон, 2 – система возбуждения колебаний лепестков камертона; 3 – преобразователь фаз; 4, 5 – усилитель; 6 – тензодатчик; 7 – блок управления; 8 – преобразователь информации б) К пояснению принципа работы КГ Лепестки 1 гироскопа приводятся в колебания в противофазе с относительной скоростью . При наличии переносной угловой скорости основания возникает кориолисово ускорение приведенных масс m и соответствующие кориолисовы силы инерции, которые создают момент , который уравновешивается упругим моментом торсиона , где К – приведенная жесткость торсиона. Угол «закрутки» торсиона фиксируется пьезодатчиком, оптическим устройством и др. , (7) где Вводя синусное преобразование сигнала ( ную составляющую ( ) выделяют его постоян- ): , где – чувствительность прибора. Таким образом, гироскоп работает в режиме ДУС. Однако технологические возможности 60-70-х годов не позволили создать гироприборы на этом принципе. В отличие от роторных гироскопов (с быстровращающимся ротором) вмбрационные камертонные гироскопы относят к классу «осцилляторных гироскопов». Развитие идеи создания осцилляторных вибрационных гироскопов нашло отражение в разработке вибрационных рамочных, волновых твердотельных гироскопов, микромеханических и др., получивших широчайшее применение в XXI веке. Одним из первых серийных гироскопов, у которого отсутствует быстровращающийся ротор, явился вибрационный рамочный гироскоп (ВРГ), схема которого показана на рис. 7. Чувствительным элементом ВРГ является латунная рамка 4 с обмоткой 5, (2,3 – элементы магнитной системы). Рамка имеет возможность поворота в камневых опорах 6, питание к рамке подводится через токоподводы. Чувствительный элемент (ЧЭ) совершает колебания с частотой вращения объекта (корпуса 1). Колебания ЧЭ преобразуются и выходной сигнал ВРГ характеризует угловую скорость объекта ( ). Кинетический момент ЧЭ создается за счет вращения объекта вокруг продольной оси. Демпфирование колебаний рамки осуществляется магнитно-индукционной системой, создавая момент , здесь D – удельный момент демпфирования. Съём сигнала по углу (датчик угла) осуществляется с помощью дополнительной обмотки при вращении рамки 5 в магнитном поле. Рисунок 7 – Схема вибрационного рамочного гироскопа (ВРГ) Составим уравнение движения ВРГ по традиционной схеме. Выберем (рис. 8) системы координат (СК): – базовая СК; СК OXYZ связана с корпусом (объектом), СК Oxyz связана с ЧЭ. Найдем проекции угловых скоростей на оси Oxyz при малом , считая : ; ; + , где – проекции скорости объекта, – угол поворота объекта относительно СК . Рисунок 8 – К составлению уравнений ВРГ При составлении уравнений движения рамки относительно Oy воспользуемся принципом Даламбера (сумма всех моментов, действующих на тело, равна нулю): , где – инерционный момент рамки при наличии ускорения ; здесь B – момент инерции рамки относительно оси Oy; – гироскопический момент; – внешний момент. Инерционный момент рамки: При и для установившегося движения рамки : . Для определения гироскопического момента найдем проекции кинетического момента (момента количества движения) рамки на оси Ox, Oz: . В соответствии с правилом гироскопического момента найдем: Момент внешних сил , здесь – вредные моменты, действующие вокруг оси Oy; при описании принципа работы ВРГ полагаем . Суммируя моменты, получим: , (8) где - кинетический момент ВРГ. Из (8) видно, что при наличии вращения объекта с угловой скоростью центробежный инерционный момент рамки в ее установившемся движении уравновешивается гироскопическим моментом (за целое число оборотов объекта вокруг продольной оси). Угол содержит информацию о проекциях угловой скорости объекта , т.е. ВРГ является двухкомпонентным датчиком угловых скоростей (ДУС): (9) Выходной сигнал с датчика угла (ДУ): , где – крутизна выходной характеристики ДУ. Далее, вводя синусно-косинусное (умножая на зование сигнала, получают: ; , где ) преобра- – чувствительность ВРГ, которая зависит от ; (10) - ко- эффициент усиления преобразователя. ВРГ – грубый прибор; порог чувствительности ВРГ составляет ; диапазон измеряемых скоростей при скорости вращения ; масса прибора без электроники – 40 г. На первых этапах развития микромеханических гироскопов [3] распространение получила схема микромеханического гироскопа рамочного типа (МГР), у которого сосредоточенная масса m находится в кардановом подвесе и является его внутренней рамой 1 (рис. 9). Внешняя 2 и внутренняя 1 рамы подвешены на упругих торсионах 3.4,5,6. Датчик момента (ДМ) 9, расположенный по оси внутренней рамки 1 и возбуждающий ее колебания , здесь – амплитуда и частота колебаний рамки 1. Выходной сигнал снимается с датчика угла (ДУ) 7 и преобразуется в блоке обработки выходной информации 8. Рисунок 9 – Микромеханический гироскоп рамочного типа Выберем системы координат, связанные с: базовая СК – с корпусом; СК - наружной рамкой; СК Oxyz – внутренней рамкой. Считая рамку 2 невесомой, рассмотрим принцип работы МГР. Наличие угловой скорости корпуса приведет к появлению гироскопического момента, действующего на опоры 4,6. Рассмотрим движение элементарной массы , здесь – плотность, S – площадь боковой грани сплошной рамки. Кориолисово ускорение массы : , где – малый угол поворота рамки 1. Соответствующая кориолисова сила инерции создает момент вокруг оси наружной рамки: . Переходя от приращений к дифференциалам и интегрируя , получим выражения для гироскопического момента: . Выделим постоянную составляющую гироскопического момента (за целое число колебаний рамки): где – кинетический момент рамки 1; B – приведенный момент инерции рамки 1 относительно оси Ox. Гироскопический момент меняется с частотой и в установившемся движении ( ) уравновешивается упругим моментом торсионов , здесь K – приведенная угловая жесткость торсионов; угол – угол поворота наружной рамы. Выходной сигнал с датчика угла 7 (ДУ): . . После выделения постоянной составляющей сигнала в блоке обработки информации (× ): , (11) где – чувствительность МГР по угловой скорости; – коэффициент усиления преобразователя. Для уменьшения энергопотребления колебания рамки осуществляют на частоте собственных колебаний. Если центр масс рамки 1 смещен (см. пунктир рис. 9) на величину l относительно т. O пересечения осей карданова подвеса, то при ускорении вокруг оси возникает момент инерционной силы . В этом случае гироскоп может выполнять и роль акселерометра: , (12) где – чувствительность МГР по ускорению. В микромеханических гироскопах балочного типа возбуждаются колебания упругой балки, закрепленной консольно или на двух опорах; применяются балки прямоугольного и треугольного сечений. При наличии угловой скорости корпуса прибора возникают кориолисовы силы инерции (гироскопические силы) и соответствующий прогиб балки, который содержит информацию об измеряемой угловой скорости . Рассмотрим принцип измерения угловой скорости объекта с помощью колеблющейся массы m, укрепленной на упругом стержне (балке). Выберем СК (рис. 10), связанную с корпусом прибора, который вращается в инерциальном пространстве с угловой скоростью . Масса m на стержне (массой стержня пренебрегаем) принудительно колеблется с частотой v, малой амплитудой (по углу ; на рис. 10 см. пунктиром) и угловой скоростью ; линейная скорость массы . Масса при наличии переносной скорости и относительной линейной скорости движется с кориолисовым ускорением , которое является причиной возникновения кориолисовой (гироскопической) инерционной силы, создающей гироскопический момент . Гироскопический момент уравновешивается упругим моментом ; здесь K – приведенная угловая жесткость стержня: . Рисунок 10 – Схема стержневого гироскопа С помощью датчика угла (пьезоэлемента, тензодатчика и др.) фиксируется угол , здесь – крутизна характеристики ДУ по напряжению. Вводя преобразование сигнала (× ): и выделяя постоянную составляющую сигнала (по углу ), получим: , (13) где – чувствительность «стержневого» ДУС; – коэффициент усиления преобразователя. При наличии линейного ускорения возникает дополнительный момент инерциальной силы , следовательно, выходной сигнал прибора (ДУС-акселерометра) будет содержать информацию по и : , (14) где – чувствительность прибора по ускорению; – коэффициент усиления преобразователя по второму каналу – каналу обработки сигнала по ускорению. Более совершенной конструкцией (по сравнению со «стержневым» гироскопом) являются микромеханические гироскопы «балочного типа». Основным элементом такого гироскопа является вибрирующая балка прямоугольного или треугольного сечения. Для консольно закрепленной балки (рис. 11) выберем следующие СК: – базовая СК, связанная с основанием (корпусом) 3; СК Oxyz – связана с чувствительным элементом – балкой 1. Пьезоэлементы 2 возбуждают колебания балки . Изгиб балки 1 (угол ) фиксируется датчиками угла 4 (емкостными, пьезодатчики и др.), сигнал с которых подается на блок 5 преобразователя информации. Выделим элементарную массу балки массой m. При наличии угловой скорости основания возникает кориолисово ускорение , здесь - относительная линейная скорость массы . Соответствующая кориолисова сила действует на массу и вызывает гироскопический момент , здесь S – площадь сечения балки. Рисунок 11 – Схема балочного гироскопа Гироскопический момент, изгибающий балку, равен (заменяем приращение дифференциалом dz и интегрируем): . Гироскопический момент уравновешивается упругим моментом ; здесь K – приведенная жесткость балки на изгиб, - угол поворота балки вокруг оси Ox, который фиксируется пьезоэлементом 4. Угол . После преобразования сигнала (× ) выде- ляется постоянная составляющая сигнала: , где h – чувствительность прибора, – коэффициенты датчика угла 4 и преобразователя 5. Нестабильность чувствительности определяется главным образом нестабильностью жесткости (влияние температуры, старение, способом крепления и др.) и характеристикой пьезоэлемента. Для повышения точности применяют так называемые биморфные гироскопы (рис. 12). У которых две склеенные пьезоэлектрические пластины поляризованы в противоположных направлениях. К пластинам прикладывается напряжение, одна пластина сжимается, другая растягивается, возбуждая колебания балки. Рисунок 12 – Основной элемент балочного гироскопа Биморфные гироскопы имеют небольшие размеры (например, ENC03R 8 , массой 0,2 г.) с достаточно высокими характеристиками. Основной недостаток при использовании пьезокерамики – температурная нестабильность параметров. Разновидностью балочных гироскопов можно считать камертонные гироскопы. Использование в качестве чувствительного элемента гироскопа балки позволяет создать комбинированный гироскоп, выполняющий функции ДУС и акселерометра. При наличии ускорения возникает инерционная сила (рис. 11) для элементарной массы , которая на плече z создает момент . Переходя от приращений к дифференциалам и интегрируя, получим . Инерционный момент сольно закрепленной балки уравновешивается упругим моментом кон- и , т.е. угол содержит информацию об ускорении. Разделение сигналов по угловой скорости и линейному ускорению (см. аналогичное выражение (14)) осуществляется с помощью соответствующих схем фильтрации сигнала. В волновых твердотельных гироскопах цилиндрический или полусферический резонатор приводится в колебание в плоскости, перпендикулярной его оси [2]. При вращении (переносном) резонатора (корпуса прибора) возникают кориолисовы силы инерции, которые воздействуют на резонатор так, что часть резонатора растягивается, а другая – сжимается, что приводит к отставанию упругой волны резонатора на некоторый угол , содержащий информацию об угловой скорости корпуса прибора. Точность прецизионных волновых твердотельных гироскопов достигает 10-3 град/ч. Таким образом, принцип работы механических и электромеханических гироскопов основан на сообщении чувствительному элементу гироскопа (ротору, камертону, рамке, балке, упругой оболочке-резонатору и др.) относительной скорости ( ) с помощью специального привода (реже при вращении объекта). Наличие переносной угловой скорости корпуса прибора, установленного на объекте, приводит к появлению кориолисова ускорения, кориолисовых сил инерции, момента кориолисовых сил инерции (т.е. гироскопического момента) и возникновению свойств гироскопа, используемых для измерения параметров ориентации объекта. Заметим, что в литературе стал встречаться термин «кориолисовый гироскоп», что очевидно некорректно. В отличие от механических гироскопов, оптические гироскопы (волоконно-оптические и лазерные) основаны на использовании известного метода Саньяка и Майкельсона, который показал, что при вращении оптического контура расстояния, проходимые разнонаправленными лучами, в контуре отличаются на величину, пропорциональную угловой скорости вращения контура в инерциальном пространстве [1]. В настоящее время точность оптических гироскопов достигает 10-4 град/ч. На базе гироскопов и акселерометров (чувствительных элементов) созданы системы ориентации и стабилизации объектов, системы наведения, платформенные и бесплатформенные инерциальные навигационные системы, интегрированные пилотажно-навигационные комплексы, совершенствование которых требует дальнейшего улучшения их чувствительных элементов в направлении миниатюризации, повышения точности, снижения стоимости, увеличения срока работы в сложных условиях эксплуатации. Литература 1. Гироскопические системы, ч. I-III. Под ред. Д.С. Пельпора. – М.: Высшая школа, 1986-1988 г.г. 2. Матвеев В.А., Лунин Б.С., Басараб М.А. Навигационные системы на волновых твердотельных гироскопах. – М.: Физматлит, 2008. 3. Распопов В.Я. Микромеханические приборы. – М.: Машиностроение, 2007.