исследование и разработка методов управления
реклама

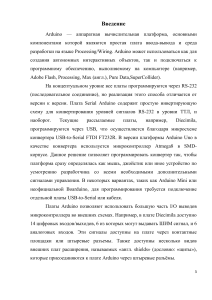
ИССЛЕДОВАНИЕ И РАЗРАБОТКА МЕТОДОВ УПРАВЛЕНИЯ АНТРОПОМОРФНЫМИ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ НА ОСНОВЕ АНАЛИЗА ПРОЦЕССОВ МОЗГОВОЙ ДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА Р.В. Олейник, И.И. Борисов, С.С. Резников СПб НИУ ИТМО, Санкт-Петербург, Россия [email protected] УДК 62-503.55 Аннотация. Доклад посвящен биомеханическим исследованиям, в частности описанию движения верхних конечностей человека с точки зрения биомеханики, и достижениям в области протезирования верхних конечностей. В докладе рассмотрены основные преимущества и недостатки существующих бионических протезов. В связи, с чем были выведены основные требования к проектируемой системе. На основе сформулированных требований была разработана и спроектирована антропоморфная система с целью описания движения кисти человека. В докладе подробно изложены принципы управления системой и дальнейшие пути развития. Объектом исследований в данной работе является кисть человека. До сих пор считается, что человеческая кисть является самым лучшим "биоманипулятором" среди аналогичных приспособлений позвоночных животных. Причем она одновременно и самый универсальный манипулятор — мы можем совершать с ее помощью множество разнообразных и одновременно высокоточных движений. Эволюция потратила тысячелетия на то, чтобы довести это весьма полезное устройство до совершенства, хотя, без сомнения, люди и сами ей в этом помогали. Традиционная точка зрения по поводу формирования этой части тела выглядит так: унаследовав от древесных предков гибкую и приспособленную к хватательным движениям кисть, древние люди начали использовать ее для манипуляций с предметами в процессе изготовления орудий труда. Это способствовало развитию гибкости пальцев и ладони, а также противопоставлению большого пальца всем остальным. В какой-то момент естественный отбор стал благоприятствовать особям с именно такой кистью, и, обеспечивающие подобное строение данной части тела, гены стали доминирующими в человеческой популяции. Проще говоря, еще со времен Фридриха Энгельса ученые считали, что развитие кисти шло по пути повышения ее способности к манипуляции с предметами. Непосредственно, задачей, которая была поставлена, является проектирование антропоморфного механического манипулятора на основе встроенного микроконтроллера и системы управлении им с целью описания движения кисти человека. Суть исследования состоит в изучении процесса управления движением сервоприводов манипулятора, по средствам удаленной передачи данных, фиксируемых с помощью электроэнцефаллографа и дальнейшей их обработке. В работе были рассмотрены методы и способы биомеханических исследований, существующие проблемы в области протезирования, а также механизм движений верхних конечностей. Исходя из полученных сведений, можно подвести итог: большинство бионических протезов на сегодняшний день имеет существенно высокую стоимость, а также недостатки в виде отсутствия или неполноценности обратной связи между протезом и человеком. В качестве метода описания движения верхней конечности человека в данной работе решено использовать анализ с помощью механической модели кисти, портативного электроэнцефаллографа с двумя контактами в качестве чувствительных элементов и необходимых программных пакетов. В ходе работ был спроектирован и испытана рука-манипулятор, в основе управляющей схемы которой находится микроконтроллер Arduino. На рисунке 1 представлена спроектированная рука-манипулятор. Рис 1. «Рука» представляет собой пятипалую «кисть» с подвижными «пальцами», «ладонь», «запястье» являющееся кронштейном из двух соединённых сервоприводов, а также «предплечье», выполненное в с использованием технологий 3D-печати, как и все прочие детали, кроме «запястья». Каждый «палец» привязан натянутым тросиком к отдельному сервоприводу, в свою очередь, сервоприводы закреплены в «предплечье» и подключены к управляющей плате (Arduino). Управляющий сигнал, поступающий на плату, генерируется портативным электроэнцефаллогафом, собранным в домашних условиях. На данном этапе исследование принципиальная схема электроэнцефаллографа находится в стадии тестирования и доработки. Целью доработки является обеспечение четкого отслеживания альфа- и бета-ритмов. Альфа-ритм (α-ритм) — ритм ЭЭГ в полосе частот от 8 до 14 Гц, средняя амплитуда 30—70 мкВ, могут однако наблюдаться высоко- и низкоамплитудные α-волны. Регистрируется у 85—95% здоровых взрослых. Лучше всего выражен в затылочных отделах. Наибольшую амплитуду α-ритм имеет в состоянии спокойного бодрствования, особенно при закрытых глазах в затемнённом помещении. Блокируется или ослабляется при повышении внимания (в особенности зрительного) или мыслительной активности. Для этого ритма характерно возникновение спонтанных изменений амплитуды (модуляции α-ритма), выражающихся в чередующемся нарастании и снижении амплитуды волн с образованием так называемых «веретён», длительность которых чаще всего колеблется от 2 до 8 с. Различают α-активность (состоит из αволн с длительностью от 80 до 125 мс и регистрируется в любых мозговых структурах) и α-ритм (регулярная волновая активность с частотой порядка 10 Гц, регистрируемая в затылочных областях). Согласно некоторым исследованиям, ритмичность и чёткая периодичность α-ритма определяют его возможную роль в сканировании и квантовании поступающей информации. Бета-ритм (β-ритм) — ритм ЭЭГ в диапазоне от 14 до 30 Гц с напряжением 5—30 мкВ, присущий состоянию активного бодрствования. Наиболее сильно этот ритм выражен в лобных областях, но при различных видах интенсивной деятельности резко усиливается и распространяется на другие области мозга. Так, выраженность β-ритма возрастает при предъявлении нового неожиданного стимула, в ситуации внимания, при умственном напряжении, эмоциональном возбуждении. Бета-волны по форме близки к треугольным вследствие заострённости вершин. Относятся к быстрым волнам. Их амплитуда в 4—5 раз меньше, чем амплитуда α-волн. β-ритм характерен для стадии быстрого сна или при решении сложных вербальных задач.[5] В итоге, в данной работе был исследован механизм движений верхней конечности человека на основе методов биомеханики. Также был сделан подробный обзор существующих на данный момент бионических протезов и рассмотрены наиболее современные системы со своими преимуществами и недостатками, в результате чего сформулированы требования к разрабатываемой системе и выбраны необходимые устройства. Благодаря полученным сведениям была спроектирована конструкция, создан макет механической модели руки человека, а также разработана система управления созданной моделью. В основе управляющей системы находятся микроконтроллеры, для которых был разработан алгоритм, написана и испытана программа в среде программирования Arduino. В качестве дальнейших путей развития системы можно указать разработку способов передачи обратного сигнала человеку, с целью повышения управляемости механической модели, то есть оснащение системы функциями обратной связи, а также улучшение конструкции и дизайна для обеспечения большего подобия руке человека и обеспечение компактности устройства. ЛИТЕРАТУРА: 1. 2. 3. 4. 5. Зацисорский В.М., Аруин А.С., Селуянов В.Н. //Биомеханика двигательного аппарата человека//– М,: Физкультура и спорт. 1981. - 143 с., ил. – ( Наука - спорту). Бранков Г.:[Пер. с болгарского] Джупанова В., [Под редакцией] Кнетса И.В. //Основы биомеханики//– М,: Издательство "Мир" Москва 1981 – 256 с.: ил. BugaBooks [Электронный ресурс]: Учебник для ВУЗов. В.И. Дубровский, В.Н. Федорова// Биомеханика// – Режим доступа: – http://bugabooks.com/book/22-biomexanika/2annotaciya.html – Загл. с экрана. – Яз. рус. Соммер У. //Программирование микроконтроллерных плат Arduino/Freeduino//— Спб.: БХВ-Петербург, 2012. 256 c. ил — (Электроника) ISBN 978-5-9775-0727-1 Jensen O., Goel P., Kopell N., Pohja M., Hari R., Ermentroutf B. //On the human sensorimotorcortex beta rhythm: Sources and modeling // NeuroImage. — 2005. — Т. 26. — С. 347 – 355. — DOI:10.1016/j.neuroimage.2005.02.008 А.К.Платонов [и др.] //Методы биомехатроники тренажёра руки человека // Препринты ИПМ им. М.В.Келдыша. 2012. № 82. 40 с. URL: http://library.keldysh.ru/preprint.asp?id=2012-82 6.