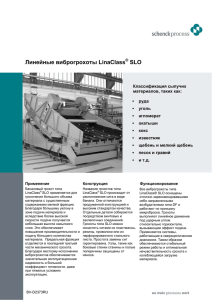
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ РАБОТА СТУДЕНТА по специальности 5В072400 – «Технологические машины и оборудование» на тему: «Моделирование работы вибрационного грохота» Выполнил: студент группы ТМиО-14ск Оразбеков Н.Б. Научный руководитель: старший преподаватель, к.т.н. Ногаев К.А. Темиртау, 2015 Содержание Введение 3 1 Общие сведения о вибрационных машинах 5 2 Вибрационные грохоты 7 3 Создание геометрической модели вибрационного грохота 10 4 Динамическое моделирование работы вибрационного грохота 13 Список использованных источников 16 2 Введение Вибрационные машины и процессы получили широкое и разнообразное применение во многих отраслях промышленности. Вибровозбудители общего назначения и глубинные вибровозбудители выпускаются в массовом масштабе. Вибрационные процессы формования железобетонных изделий и изделий из неармированного бетона заняли господствующее положение. Вибрационные грохоты эксплуатируются на множестве строек, карьеров и предприятий. Значительное распространение получили вибрационные машины для уплотнения грунта, дорожных оснований и покрытий. Уплотнение и измельчение, смешение и сепарация, забивка свай и бурение скважин, разгрузка смерзшихся материалов из транспортных средств и разработка мерзлых грунтов, погрузка насыпных материалов и отмывка песка и гравия — это далеко не полный перечень технологических переделов, в которых целенаправленное применение вибрационных машин приносит большую пользу [1]. При конструктивной простоте большинства вибрационных машин их динамика и динамика вибрационных процессов оказываются весьма сложными. Для успешной работы в области вибрационной техники и технологии необходимо изучение с единой точки зрения определенного комплекса теоретических методов анализа, практических сведений и рекомендаций. Современное развитие информационных технологий и систем инженерного анализа позволяет эффективно проводить исследование вибрационных процессов путем имитационного моделирования. Моделирование рабочих процессов машин может быть осуществлено с использованием современных пакетов автоматизированного инженерного анализа (CAE-систем). Одним из таких пакетов является система трёхмерного твердотельного и поверхностного параметрического проектирования (САПР) Autodesk Inventor — компании Autodesk, предназначенная для создания цифровых прототипов промышленных изделий. Инструменты Inventor 3 обеспечивают полный цикл проектирования и создания конструкторской документации: 2D-/3D-моделирование; создание изделий из листового материала и получение их разверток; разработка электрических и трубопроводных систем; проектирование оснастки для литья пластмассовых изделий; динамическое моделирование; параметрический расчет напряженно-деформированного состояния деталей и сборок; визуализация изделий; автоматическое получение и обновление конструкторской документации (оформление по ЕСКД). Образовательным сообществом Autodesk предоставляется бесплатные студенческие версии Autodesk Inventor для использования студентами и преподавателями в образовательных целях. Функционально такая версия Autodesk Inventor ничем не отличается от полной. Целью работы является проверка возможности систем инженерного анализа Autodesk Inventor для исследования рабочих процессов вибрационных машин на компьютере. Для достижения поставленной цели необходимо решить такие задачи исследований: – разработать 3D модель вибрационной машины; – провести компьютерное моделирование рабочего процесса. 4 1 Общие сведения о вибрационных машинах Машины, в которых технологический процесс выполняется на основе возбужденных колебаний, называют вибрационными машинами. В вибрационных машинах исполнительному органу сообщают вибрацию для осуществления или интенсификации выполняемого процесса либо для повышения качества выполняемой работы [1]. Для возбуждения вибрации в этих машинах используют специальные устройства — вибровозбудители. В различных отраслях техники широко применяются следующие типы вибровозбудителей: 1) механические преобразователи вращательного движения в колебательное; 2) пневмо- и гидромеханические преобразователи, в которых энергия газообразного или жидкого рабочего тела преобразуется в энергию механических колебаний; 3) электромеханические преобразователи, в которых электрическая энергия преобразуется в энергию механических колебаний; 4) инерционные вибровозбудители, вынуждающая сила которых вызывается колебательным или вращательным движением инерционных элементов. К числу механических преобразователей вращательного движения в возвратно-поступательное относятся кривошипно-шатунные, эксцентриковые, кулачковые механизмы, отдельные звенья которых могут быть деформируемыми. К числу пневмо- и гидромеханических преобразователей относятся: поршневые, гидроударные диафрагмовые, сильфонные, вибровозбудители; баллонные сирены; вибровозбудители; свистки; язычковые автоколебательные устройства. Сирены, свистки и язычковые автоколебательные устройства находят применение в ультразвуковой технике 5 и акустических, в частности музыкальных, приборах. У сирен колебания среды возбуждаются порциями газа или жидкости, периодически вырывающимися через отверстия вращающегося диска. У свистков возбуждаются автоколебания потока выпускаемого газа или жидкости. У язычковых устройств возбуждаются автоколебания язычка в потоке газа или жидкости. В гидроударных возбуждаются вибровозбудителях инерционными силами колебания потока рабочего жидкости, органа который периодически быстро перекрывается. Такой способ возбуждения ударных колебаний был использован в ряде машин для бурения скважин в твердых породах. Поршневые, диафрагмовые, сильфонные, баллонные вибровозбудители могут быть трех типов: автоколебательные; с осуществляемым извне движением управляющих элементов (клапанов, золотников и т. п.); пульсаторные, работающие в режиме вынужденных колебаний, поддерживаемых создаваемыми вне вибровозбудителя колебаниями давления рабочего тела. Пневмомеханические используются и лишь в немногих гидромеханические вибрационных преобразователи машинах, но имеют благоприятные перспективы более широкого применения. Они просты по устройству, позволяют плавно регулировать частоту или размах колебаний, дают возможность получать колебания различного спектрального состава. К числу электромеханических преобразователей относятся: электрострикционные (включая пьезоэлектрические), магнитострикционные (включая пьезомагнитные), электростатические, электродинамические, электро- магнитные. В вибрационных машинах производственного назначения гораздо шире всех остальных типов вибровозбудителей применяются электромагнитные и центробежные возбудители колебаний. 6 2 Вибрационные грохоты Вибрационные грохоты широко используют в горнорудной промышленности для разделения материалов на классы перед дроблением, промывки материала перед обогащением в тяжелых средах и последующей отмывки суспензий, обезвоживания продуктов обогащения. Для аналогичных целей вибрационное грохочение используют в горно-химической, угольной промышленности и при производстве строительных материалов. В последних двух случаях вибрационные грохоты применяют для разделения готового продукта (угля, щебня, гравийно-песчаных масс) на кондиционные товарные классы перед отправкой потребителям. В металлургической промышленности на вибрационных грохотах удаляют некондиционную по крупности мелочь из сырых окатышей, после обжига которых эту операцию повторяют. Аналогичную операцию выполняют и с агломератом после спекания – сначала горячим, а затем – охлажденным. Перед доменной плавкой контрольному грохочению для удаления мелочи подвергают все сырьевые материалы, загружаемые в печь. Вибрационный грохот – это грохот с вибрационным приводом [2], который в отличие от жесткого кинематического привода называют динамическим (или силовым). Принципиальная особенность вибрационного грохота состоит в том, что характер колебательного движения, амплитуда и форма траекторий грохота определяются исключительно динамическими факторами – силовым воздействием, генерируемым приводом (вынуждающей силой), числом и массой движущихся элементов, а также числом, расположением и характеристиками упругих элементов. Вибрационный (или динамический) привод называют вибровозбудителем. В подавляющем большинстве конструкций грохотов используют центробежные (дебалансные) вибровозбудители с вращающейся неуравновешенной массой (инерционным элементом), гораздо реже – электромагнитные. 7 Одновальный дебалансный статически неуравновешенный вибровозбудитель (рисунок 1) имеет дебаланс 1, центр массы которого расположен в точке 𝐶𝑚 . Он жестко связан с валом 2, вращающимся вокруг оси О в подшипниках, соединенных с корпусом. Статический момент массы вибровозбудителя равен произведению 𝑚𝑒, где 𝑚 – масса дебаланса; 𝑒 – эксцентриситет массы дебаланса. При вращении вибровозбудителя с угловой скоростью 𝜔 развивается центробежная вынуждающая сила 𝐹 = 𝑚𝑒𝜔2 , которая передается на корпус через подшипники. Таким образом, вынуждающая сила 𝐹 представляет собой вектор постоянного модуля, вращающийся с угловой скоростью 𝜔 . Рисунок 1 – Схема дебалансного вибровозбудителья По динамическим признакам вибрационные грохоты подразделяются: – по способу возбуждения колебаний: с дебалансным вибровозбудителем; с электромагнитным вибровозбудителем; – по числу вибровозбудителей: с одним, двумя и т. д.; – по способу синхронизации работы вибровозбудителей (если их более одного): с принудительной механической синхронизацией; самосинхронизацией; принудительной электрической синхронизацией; – по числу колеблющихся масс: одно-, двух- и трехмассные; 8 – по соотношению вынуждающей и собственной частот колебаний: дорезонансные, резонансные и околорезонансные, зарезонансные, межрезонансные; – по форме колебаний рабочего органа – короба: с круговыми и близкими к ним; эллиптическими; прямолинейно направленными; комбинированными (неоднородным полем колебаний). По технологическим признакам вибрационные грохоты различаются по числу установленных на них просеивающих поверхностей: одно-, двухситные и т. д.; расположению просеивающих поверхностей относительно горизонта: наклонные (угол наклона α = 15÷30°) и горизонтальные, или слабонаклонные (α = 5÷6°). Целесообразно также характеризовать грохот по наличию перемещений просеивающих поверхностей относительно короба в целом грохота (с или отдельных неподвижными их элементов просеивающими поверхностями и активными просеивающими поверхностями). Подавляющее настоящее время большинство выпускаемых вибрационных грохотов и эксплуатируемых являются одномассными зарезонансными машинами с дебалансными вибровозбудителями. 9 в 3 Создание геометрической модели вибрационного грохота Для моделирования рабочего процесса необходима геометрическая модель вибрационного грохота. В качестве прототипа для геометрической модели выбран одномассный зарезонансный вибрационный грохот (рисунок 2) с круговыми колебаниями, возбуждаемыми одним дебалансным вибровозбудителем [2]. 1 – короб; 2 – просеивающая поверхность; 3 – вибровозбудитель; 4 – приводное устройство; 5 – упругие виброизолирующие элементы; 6 – опорная рама Рисунок 2 - Схема вибрационного грохота Используя основные формообразующие операции (вращение, выдавливание) и операцию «Массив компонентов» пакета Autodesk Inventor создали 3D моделей короба, дебалансного вибровала и опорныю раму (рисунок 3, 4, 5). 10 Рисунок 3 – Короб Рисунок 4 – Дебалансный вибровал Рисунок 5 – Опорная рама 11 Созданные 3D модели элементов вибрационного грохота вставили в пространство сборки и путем наложения зависимостей установили их в соответствующие положения (рисунок 6). Таким образом, получена геометрическая модель для последующего динамического моделирования работы вибрационного грохота. Рисунок 6 – Вибрационный грохот в сборе 12 4 Динамическое моделирование работы вибрационного грохота Динамическое моделирование дает возможность определить, насколько эффективно будет функционировать машина в реальных условиях. Среда «Динамическое моделирование» пакета Autodesk Inventor позволяет задать силы, действующие на механизм, определить скорости, ускорения и усилия, возникающие в узлах механизма при движении. Процесс моделирования динамической работы механизмов в пакета Autodesk Inventor происходит по следующей схеме [3]: 1. Задаются типы соединения компонентов сборки между собой из имеющегося перечня (вращение, скольжение, качение, различные контактные взаимодействия, пружины, толкатели и т.д.). 2. Определяются параметры соединения (гравитация, трение, демпфирование, наложенные движения и различные внешние силы). 3. Запускается процесс имитации работы – задается время работы и время выполнения каждого шага. 4. Производится анализ результатов – определяются положения деталей, скорости, ускорения, реактивные силы и крутящие моменты, движущие силы и их моменты. 5. Для определения прочности деталей методом конечных элементов данные, смоделированные в среде «Динамическое моделирование», передаются в среду «Анализ напряжений», где определяется деформация деталей в процессе работы, запасы прочности и эквивалентные напряжения. Для установления массовых характеристик задали материалы компонентов (сталь углеродистая). В геометрической модели вибрационного грохота зафиксировали опорную раму и связали их с коробом с помощью силового соединения «Пружина» с назначением жесткости. В месте сопряжения короба с дебалансным вибровалом задали стандартное соединение «Вращение» и установили скорость вращения (рисунок 7). 13 В ходе моделирования определены изменения положений, скорости и ускорения подвижных компонентов, реактивные силы в пружинах. На рисунке 8 показан график изменения положения короба по времени. Динамическое моделирование в пакете Autodesk Inventor позволяет проанализировать работу механизма при различных значениях исходных параметров и установить их влияния на рабочие показатели. Например, в ходе моделирования установили влияние скорости вращения вибровала на амплитуду (рисунок 9). Таким образом, применяя в научных исследованиях компьютерное моделирование, в частности динамическое моделирование в пакете Autodesk Inventor, можно существенно снизить затраты на исследования за счет дополнения дорогостоящих физических моделей хорошо построенной компьютерной моделью. Рисунок 7 – Динамическое моделирование работы вибрационного грохота 14 Рисунок 8 - График изменения положения короба в зависимости от времени Рисунок 9 - График изменения амплитуды колебаний в зависимости от скорости вращения 15 Список использованных источников 1. Бауман В.А., Быховский И.И. Вибрационные машины и процессы в строительстве. Учебное пособие для студентов строительных и автомобильнодорожных вузов. М.: Высшая школа, 1977. – 255 с. 2. Лукашкин Н.Д., Кохан Л.С., Якушев А.М. Конструкция и расчет машин и агрегатов металлургических заводов. Учебник для вузов. — М.: Академкнига, 2003. – 456 с. 3. Злобин А. Моделирование динамической работы механизмов в Autodesk Inventor Professional 11 // http://www.pointcad.ru/about/article/362/234/. 16