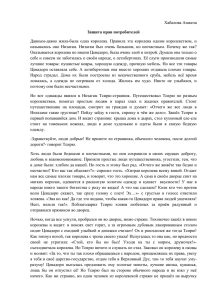
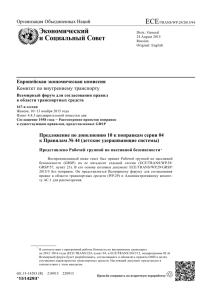
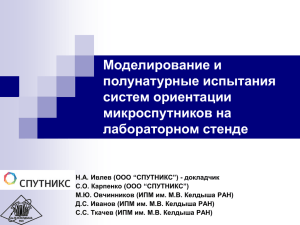
1 Московский государственный технический университет имени Н.Э.Баумана Г.В.Попов, В.Г.Попов Интерактивная программа калибровки микромеханического инерциального измерительного блока Лабораторная работа 2022 г. 2 Факультет «Приборостроение» Попов Г.В., Попов В.Г. Интерактивная программа калибровки микромеханического инерциального измерительного блока: лабораторная работа / Г.В.Попов, В.Г.Попов. – Москва: Издательство МГТУ им. Н. Э. Баумана, 2022. – 32 с.: ил. Приведена блок-схема, дано описание внутреннего устройства микросхемы MPU6000 фирмы IvenSense Inc, представляющей собой микромеханический инерциальный измерительный блок. По материалам производителя приведены характеристики каналов акселерометров, каналов датчиков угловой скорости и канала измерения температуры. Составлена линейная модель погрешностей микромеханического инерциального измерительного блока. Процедура его калибровки в нормальных климатических условиях представлена как двухэтапная процедура: на первом этапе в шести статических ориентациях, а на втором этапе – посредством интегрального метода калибровки каналов угловой скорости. При этом перевод объекта испытаний в ориентационном приспособлении из одной ориентации в другую и создание тестовых воздействий при использовании интегрального метода калибровки осуществляются вручную. Приведены формулы для определения калибровочных констант. Дано описание экспериментальной установки для проведения калибровки при помощи интерактивной программы ПЭВМ. Приведен итоговый Протокол испытаний. Для студентов приборостроительных специальностей МГТУ им. Н.Э. Баумана. 3 Предисловие В результате фантастического технологического прорыва создан новый класс инерциальных датчиков (акселерометров и гироскопов) по MEMS (Micro-ElectroMechanical Systems) технологии, которые имеют микроскопические габариты, ничтожно малую массу, исчезающее малое энергопотребление, низкую стоимость при серийном производстве. Инерциальные датчики, созданные по MEMS технологии, предоставляют также дополнительные, удобные для пользователя свойства: - электропитание всего от одного номинала постоянного напряжения обычно в диапазоне от 3,0 В до 5 В; - наличие режима пониженного энергопотребления; - наличие режима самотестирования для проверки одновременно механической и электронной частей микромеханического инерциального датчика; - наличие нескольких (обычно до четырех) диапазонов измерения, назначаемых пользователем внешними командами логического уровня; - представление выходной цифровой информации в виде одного или нескольких стандартных интерфейсов. В настоящей персонального лабораторной работе рассматривается интерактивная программа компьютера для калибровки микромеханического инерциального измерительного блока - микросхемы MPU-6000 фирмы IvenSense Inc [1], где в одном корпусе содержится полный набор оборудования для построения бескарданной инерциальной навигационной системы или автопилота. Состав оборудования микросхемы - три акселерометра, три датчика угловой скорости (ДУС), встроенный канал измерения температуры инерциальных датчиков, аналого-цифровые преобразователи (АЦП), микропроцессор, интерфейсные устройства для выдачи информации потребителям и приема информации от средств внешней коррекции. Термин инерциальный измерительный блок (ИИБ), англ. Inertial Measurement Unit – IMU, введен для обозначения устройства, измеряющего параметры движения основания, на котором он установлен. Для систем, построенных на базе гиростабилизированной платформы, понятию ИИБ соответствует гиростабилизированная платформа вместе с сопутствующей сервисной электроникой, а для бесплатформенных гироскопических систем – любое устройство, содержащее набор инерциальных датчиков сопутствующую сервисную электронику. (гироскопов и акселерометров) и 4 Цели лабораторной работы: - дать сведения о современных микромеханических ИИБ; - представить линейные модели погрешностей микромеханических ИИБ; - привить практические навыки работы с микромеханическим ИИБ; - научить методикам испытаний и методам калибровки микромеханических ИИБ; - дать сведения о составе контрольно-испытательного оборудования, целевом назначении каждого прибора и устройства, их характеристиках; - научить приемам работы с информационно-измерительными системами, построенными на базе современной измерительной и вычислительной техники; - ознакомить с методами обработки экспериментальных данных; - привить навыки составления технических отчетов. После выполнения лабораторной работы студент должен: - знать устройство, принцип действия, режимы работы, основные характеристики микромеханического ИИБ; - знать модель погрешностей каналов ускорения и каналов ДУС микромеханического ИИБ; - знать план эксперимента по определению калибровочных констант ИИБ; - знать основные расчетные формулы вычисления калибровочных констант ИИБ; - владеть методикой проведения эксперимента; - уметь обрабатывать экспериментальные данные; - дать ответы на контрольные вопросы; - представить отчет о лабораторной работе. 5 Объект испытаний - микросхема MPU-6000 Внутреннее устройство микросхемы MPU-6000 [1] представлено на блок-схеме (рис.1). Синхронизатор в левом верхнем углу рис. 1 получает извне опорную частоту, преобразует ее для внутренних нужд и одну из частот выдает наружу. Три акселерометра с взаимно ортогональными осями чувствительности (триада акселерометров) вырабатывают аналоговые сигналы, пропорциональные кажущимся ускорениям. Характеристики триады акселерометров приведены таблице 1. Три датчика угловой скорости (ДУС) с взаимно ортогональными осями чувствительности (триада ДУС) вырабатывают аналоговые сигналы, пропорциональные угловым скоростям основания. Их работа инициируется соответствующими контурами возбуждения. Характеристики триады ДУС приведены в таблице 2. В микросхеме MPU-6000 обеспечена минимальная перекрестная чувствительность между акселерометрами и ДУС. Для контроля механических и электрических частей инерциальных датчиков предусмотрены устройства самотестирования. Датчик температуры вырабатывает аналоговый электрический сигнал, пропорциональный температуре внутри микросхемы. Характеристики канала измерения температуры приведены в таблице 3. Семь 16-разрядных АЦП преобразуют аналоговые сигналы инерциальных датчиков и датчика температуры в цифровые коды. Передача этой информации в регистры датчиков осуществляется через формирователь сигнала последовательно с разделением во времени. Во внутренней памяти микросхемы ИИБ хранятся данные заводской калибровки. Цифровой процессор расчета движения (от англ.- Digital Motion Processor) управляет процессом накопления данных и обменом с внешними устройствами. Кроме того, он может автономно без иных ресурсов рассчитывать по специально созданной и загруженной программе параметры движения в соответствии с показаниями инерциальных датчиков. Буфер FIFO объемом 1024 байт, организованный по принципу (первый вошёл первый вышел), уменьшает потребление питания, позволяя внешнему процессору считывать данные большими порциями, уходя в промежутках в спящий режим, в то время как ИИБ автономно накапливает данные. 6 Регистры конфигурации, регистры датчиков и регистр прерывания состояния, обеспечивают взаимодействие датчиков с устройствами обмена. Приемник последовательных интерфейсов I2C и SPI взаимодействует с внешними устройствами в части обмена информацией. Диспетчер I2C последовательного интерфейса через мультиплексор обеспечивает обмен данными через мультиплексор со средствами внешней коррекции. В правом нижнем углу рис. 1 показано устройство, которое формирует из напряжения питания необходимые опорные напряжения и напряжения смещения. Электропитание микросхемы ИИБ осуществляется от одного номинала постоянного напряжения 2,375…3,46 В с потреблением нормальных климатических условиях: - при одновременной работе ДУС, акселерометров и цифрового процессора расчета движения 3,9 мА; - при одновременной работе ДУС и цифрового процессора расчета движения (акселерометр отключен) 3,7 мА; - при работе только ДУС (акселерометры и цифровой процессор расчета движения отключены) 3,6 мА; - при работе только акселерометров 500µА. Предусмотрены режимы экономного потребления электропитания. Микросхема MPU-6000 заключена в компактный и тонкий пластмассовый корпус QFN для портативных устройств габаритами 4х4х0,9 мм с 24 выводами (по 6 выводов на каждую сторону) под поверхностный монтаж. Рабочий диапазон температуры окружающей среды составляет минус 40ºC до 85ºC. Микромеханическая структура датчиков герметизирована и упакована на уровне подложки. Для правильной ориентации корпуса микросхемы в одном из углов нанесен ключ в виде точки. На рис.2 указана привязка осей чувствительности ИИБ к корпусу микросхемы. Микросхема устойчива к одиночным ударам до 10000 g. 7 Рис. 1. Блок-схема микросхемы MPU-6000 фирмы IvenSense Inc 8 Таблица 1 Характеристики каналов акселерометров микросхемы MPU-6000 Напряжение питания 2,375…3,46 В, Температура окружающей среды +25ºC Параметр Чувствительность акселерометров Полный диапазон Длина слова на выходе АЦП Масштабный коэффициент Допуск на масштабный коэффициент Изменение масштабного коэффициента в диапазоне температур Нелинейность Межосевая чувствительность Выходной сигнал акселерометра при нулевом ускорении Начальный допуск В диапазоне температур Шумовые характеристики акселерометра Спектральная плотность шума Условия Min 0 – код диапазона акселер. 1 – код диапазона акселер. 2 – код диапазона акселер. 3 – код диапазона акселер. Типовое значение Max ±2 ±4 ±8 ±16 16 16384 8192 4096 2048 0 – код диапазона акселер. 1 – код диапазона акселер. 2 – код диапазона акселер. 3 – код диапазона акселер. -3 +3 Размерность g g g g бит ед.мл.р/g ед.мл.р/g ед.мл.р/g ед.мл.р/g % Минус 40 ºC до +85 ºC ±0,02 0,5 ±2 %/ ºC % % Оси X и Y Ось Z Оси X и Y, 0 ºC до +70 ºC Ось Z, 0 ºC до +70 ºC ±50 ±80 ±35 ±60 mg mg mg mg Диапазон ±2 g От 10 Гц 400 µg/√Гц 9 Таблица 2 Характеристики каналов ДУС микросхемы MPU-6000 Напряжение питания 2,375…3,46 В, Температура окружающей среды +25ºC Параметр Чувствительность ДУС Полный диапазон Длина слова на выходе АЦП ДУС Масштабный коэффициент ДУС Допуск на масштабный коэффициент Изменение масштабного коэффициента в диапазоне температур Нелинейность Межосевая чувствительность Выходной сигнал ДУС при нулевой угловой скорости Начальный допуск В диапазоне температур Чувствительность к пульсации напряжения питания (1…10Гц) Чувствительность к пульсации напряжения питания (10…250Гц) Чувствительность к пульсации напряжения питания (250Гц…100КГц) Чувствительность к линейным ускорениям Шумовые характеристики ДУС Общий уровень шума (СКО) Низкочастотный шум (СКО) Спектральная плотность шума Собственные частоты ДУС Ось X Ось Y Ось Z Время установления нулевого выходного сигнала ДУС от момента подачи питания Условия Min 0 – код диапазона ДУС 1 – код диапазона ДУС 2 – код диапазона ДУС 3 - код диапазона ДУС Типовое значение Max ±250 ±500 ±1000 ±2000 16 131 65,5 32,8 16,4 0 - код диапазона ДУС 1 - код диапазона ДУС 2 - код диапазона ДУС 3 - код диапазона ДУС -3 +3 Размерность º/c º/c º/c º/c бит ед.мл.р/ º/c ед.мл.р/ º/c ед.мл.р/ º/c ед.мл.р/ º/c % минус 40 ºC до +85 ºC ±2 0,2 ±2 % % % % при температуре +25ºC минус 40 ºC до +85 ºC ±20 ±20 º/c º/c синус 100мВ , =2,5В 0,2 º/c синус 100мВ , =2,5В 0,2 º/c синус 100мВ , =2,5В 4 º/c в статике Диапазон ±250 º/c Частота съема 100 Гц Частота съема 100 Гц От 10 Гц 0,1 (º/c )/g 0,05 0,033 0,005 º/c º/c º/c/√Гц 30 27 24 ±1 º/c от установившегося значения 33 30 27 30 36 33 30 КГц КГц КГц мс 10 Таблица 3 Характеристики канала измерения температуры микросхемы MPU-6000 Напряжение питания 2,375…3,46 В, Температура окружающей среды +25ºC Параметр Условия Min Чувствительность термодатчика Полный диапазон Масштабный коэффициент Смещение выходной характеристики -40 Нелинейность -1 Типовое значение Max 85 340 Размерность ºC ед.мл.р/ ºC ед.мл.р -540 (или 35) ºC +1 Здесь будет рисунок Рис. 2. Привязка осей чувствительности ИИБ к корпусу микросхемы % 11 Модель погрешностей ИИБ Измерения ИИБ типа MPU-60X0 являются комбинацией измерений триады акселерометров и триады ДУС. Линейная модель погрешности триады акселерометров (рис. 3) с номинально ортогональными входными осями, имеет вид [2], [3] AX (1 AXX )a X AXZ aY AXY a Z aOX AX (t ), AY AYZ a X (1 AYY )aY AYX a Z aOY AY (t ), (1) AZ AZY a X AZX aY (1 AZZ )a Z aOZ AZ (t ), где AX , AY , AZ - выходные показания акселерометров, м/c²; a X , aY , a Z - проекции кажущегося ускорения на оси навигационной системы координат OXYZ , м/с²; AXX , AYY , AZZ - малые относительные погрешности масштабных коэффициентов, б/р; AXZ , AXY , AYZ , AYX , AZY , AZX - малые погрешности выставки осей чувствительности, б/р; aOX , aOY , aOZ - смещения нулей акселерометров, м/с²; AX (t ), AY (t ), AZ (t ) - случайные составляющие погрешности, м/с². Рис. 3. К модели погрешности триады акселерометров 12 Линейная модель погрешности триады ДУС (рис. 4) c номинально ортогональными входными осями, имеет вид [2], [3] X (1 G XX ) X G XZ Y G XY Z G AXX a X G AXY aY G AXZ aZ GOX GX (t ), Y GYZ X (1 GYY )Y GYX Z G AYX a X G AYY aY G AYZ aZ GOY GY (t ), (2) Z GZY X GZX Y (1 GZZ )Z G AZX a X G AZY aY G AZZ aZ GOZ GZ (t ), где X , Y , Z - выходные показания ДУС по соответствующим осям, º/сек; X , Y , Z проекции угловой скорости основания на оси навигационного трехгранника OXYZ, º/сек; a X , aY , aZ - проекции кажущегося трехгранника м/сек²; OXYZ, ускорения GXX , GYY , GZZ основания - малые на оси навигационного погрешности масштабных коэффициентов ДУС, б/р; GXZ , GXY , GYZ , GYX , GZX , GZY - малые погрешности выставки осей чувствительности ДУС, б/р; GAXX , GAXY , GAXZ - коэффициенты влияния кажущихся ускорений по осям X, Y, Z на смещение нуля ДУС X, (º/сек)/g; GAYX , GAYY , GAYZ коэффициенты влияния кажущихся ускорений по осям X, Y, Z на смещении нуля ДУС Y, (º/сек)/g; GAZX , GAZY , GAZZ - коэффициенты влияния кажущихся ускорений по осям X, Y, Z на смещение нуля ДУС Z, (º/сек)/g; G0 X , G0Y , G0 Z - смещения нулей соответствующих ДУС, º/сек; GX (t ), GY (t ), GZ (t ) - случайные составляющие погрешности ДУС, º/сек. Рис. 4. К модели погрешности триады ДУС 13 Калибровка Калибровка ИИБ проводится в два этапа. Этап 1. На неподвижном основании при отсутствии вращения тестовое воздействие в виде ускорения силы тяжести прикладывается последовательно в положительном и в отрицательном направлении вдоль осей X, Y, Z. Ориентации, задаваемые ИИБ при калибровке, определены следующим образом: ориентация 1 – ось X вверх, ориентация 2 – ось X вниз, ориентация 3 – ось Y вверх, ориентация 4 – ось Y вниз, ориентация 5 – ось Z вверх, ориентация 6 – ось Z вниз. Простейшим способом создания таких тестовых воздействий является установка вручную на предварительно выставленном в горизонте основании в разные ориентации триады акселерометров и триады ДУС, закрепленных на ориентационном приспособлении (кубе с взаимно ортогональными установочными плоскостями). При этом осуществляется определение всех калибровочных констант триады акселерометров, а также смещение нулей и коэффициенты влияния кажущихся ускорений на смещения нулей триады ДУС. Сводка формул для определения калибровочных констант триады акселерометров ИИБ [2], [3]: - выражения для вычисления поправок к масштабным коэффициентам 1 [ A1 X A2 X ] 1, 2 g (3) 1 [ A A4Y ] AYY 3Y 1, 2 g (4) 1 [ A5 Z A6 Z ] 1, 2 g (5) AXX AZZ - выражения для вычисления погрешностей выставки оси чувствительности акселерометра X 1 [ A3 X A4 X ] , 2 g (6) 1 [ A 5 AX6 ] AXY X , 2 g (7) AXZ - выражения для вычисления погрешностей выставки оси чувствительности акселерометра Y 1 [ A A2Y ] AYZ 1Y , 2 g (8) 14 AYX 1 [ A5Y A6Y ] , 2 g (9) - выражения для вычисления погрешностей выставки оси чувствительности акселерометра Z AZY 1 [ A1Z A2 Z ] , 2 g 1 [ A A4 Z ] AZX 3Z , 2 g (10) (11) - выражения для вычисления смещения нуля акселерометра X aOX 1 [ A1 X A2 X ], 2 (12) aOX 1 [ A3 X A4 X ], 2 (13) aOX 1 [ A5 X A6 X ], 2 (14) - выражения для вычисления смещения нуля акселерометра Y aOY 1 [ A1Y A2Y ], 2 (15) aOY 1 [ A3Y A4Y ], 2 (16) aOY 1 [ A5Y A6Y ], 2 (17) - выражения для вычисления смещения нуля акселерометра Z aOZ 1 [ A1Z A2 Z ], 2 (18) aOZ 1 [ A3Z A4 Z ], 2 (19) aOZ 1 [ A5 Z A6 Z ], 2 (20) где A1 X , A2 X , A3 X , A4 X , A5 X , A6 X - средние значения показаний акселерометра X в соответствующих ориентациях, м/с²; A1Y , A2Y , A3Y , A4Y , A5Y , A6Y - средние значения показаний акселерометра Y ИИБ в соответствующих ориентациях, м/с²; A1Z , A2 Z , A3 Z , A4 Z , A5 Z , A6 Z - средние значения показаний акселерометра Z ИИБ в соответствующих ориентациях, м/с². 15 Здесь в выражениях (3)…(11) и далее в качестве g принято расчетное значение ускорения силы тяжести в месте проведения испытаний по формуле Гельмера с учетом поправки на высоту [2]. Сводка формул для определения калибровочных констант ДУС ИИБ [2], [3]: - выражения для вычисления коэффициентов влияния кажущихся ускорений на смещение нуля по осям X, Y, Z ДУС X G AXX 1 [ 1 X 2 X ] , 2 g (21) G AXY 1 [ 3 X 4 X ] , 2 g (22) G AXZ 1 [ 5 X 6 X ] , 2 g (23) - выражения для вычисления коэффициентов влияния кажущихся ускорений на смещение нуля по осям X, Y, Z ДУС Y 1 [ 2Y ] G AYX 1Y , 2 g (24) 1 [ 3Y 4Y ] , 2 g (25) 1 [ 6Y ] G AYZ 5Y , 2 g (26) G AYY - выражения для вычисления коэффициентов влияния кажущихся ускорений на смещение нуля по осям X, Y, Z ДУС Z G AZX 1 [ 1Z 2 Z ] , 2 g (27) G AZY 1 [ 3 Z 4 Z ] , 2 g (28) G AZZ 1 [ 5 Z 6 Z ] , 2 g (29) - выражения для вычисления смещения нуля ДУС X G0 X 1 [ 1 X 2 X ], 2 (30) G0 X 1 [ 3 X 4 X ], 2 (31) G0 X 1 [ 5 X 6 X ], 2 (32) 16 - выражения для вычисления смещения нуля ДУС Y G0Y 1 [ 1Y 2Y ], 2 (33) G0Y 1 [ 3Y 4Y ], 2 (34) G0Y 1 [ 5Y 6Y ], 2 (35) - выражения для вычисления смещения нуля ДУС Z G0 Z 1 [ 1Z 2 Z ], 2 (36) G0 Z 1 [ 3Z 4 Z ], 2 (37) G0 Z 1 [ 5 Z 6 Z ], 2 (38) где 1 X , 2 X , 3 X , 4 X , 5 X , 6 X - средние арифметические значения показаний ДУС X в соответствующих ориентациях при отсутствии тестовой угловой скорости, º/сек; 1Y , 2Y , 3Y , 4Y , 5Y , 6Y - средние арифметические значения показаний ДУС Y в соответствующих ориентациях при отсутствии тестовой угловой скорости, º/сек; 1Z , 2 Z , 3Z , 4 Z , 5 Z , 6 Z - средние арифметические значения показаний ДУС Z в соответствующих ориентациях при отсутствии тестовой угловой скорости, º/сек. Этап 2. Стандартная процедура калибровки каналов ДУС ИИБ [2], [3] предполагает создание тестовых воздействий в виде ускорения силы тяжести и вращения с постоянной скоростью относительно каждой оси чувствительности. Сравнение показаний каналов ИИБ с тестовыми воздействиями позволяет определить малые поправки к калибровочным константам ИИБ. В [2], [3] приведены формулы для определения калибровочных констант. Однако, создание тестовых вращений с постоянной угловой скоростью вызывает определенные трудности. Так, широко распространенный поворотный скоростной стол с вертикальной осью вращения – малогабаритная поворотная установка МПУ-1 - имеет следующие параметры [2]: - неравномерность угловой скорости вращения платформы 1% и более; - неточность установки скоростей по лимбу отсчетного механизма 1% и более; - несовпадение правых и левых угловых скоростей платформы 1% и более. Интегральный метод калибровки каналов ДУС микромеханического ИИБ [4], [5] предполагает замену тестовых воздействий в виде постоянных угловых скоростей 17 тестовыми воздействиями в виде поворота ИИБ на фиксированный угол с произвольной угловой скоростью за определенное время. Приложим тестовые воздействия к ИИБ в ориентационном приспособлении на горизонтальном основании (ось X направлена вверх по направлению отвесной линии) в виде ускорения силы тяжести g по оси X aX g, aY aZ 0, и в виде разворота против часовой стрелки на конечный угол, кратный целому числу полных оборотов 360 n , за время с произвольной угловой скоростью X (t ) вокруг оси X в пределах рабочего диапазона канала угловой скорости ИИБ X (t ) X (t ), XMIN X (t ) XMAX , X (t )dt 360 n, (39) 0 Y Z 0. Во время тестового разворота против часовой стрелки показания каналов скорости можно представить в следующем виде XX (t ) (1 G XX ) X (t ) G AXX g GOX GX (t ), YX (t ) GYZ X (t ) G AYX g GOY GY (t ), ZX (t ) GZY X (t ) G AZX g GOZ GZ (t ). Приложим тестовые воздействия к ИИБ в ориентационном приспособлении на горизонтальном основании (ось X направлена вверх по направлению отвесной линии) в виде ускорения силы тяжести g по оси X aX g, aY aZ 0, и в виде разворота по часовой стрелке на конечный угол, кратный целому числу полных оборотов 360 n , за время с произвольной угловой скоростью X (t ) вокруг оси X в пределах рабочего диапазона канала угловой скорости ИИБ X (t ) X (t ), XMIN X (t ) XMAX , (t )dt 360 n, X 0 Y Z 0. (40) 18 Во время тестового разворота по часовой стрелке показания каналов скорости можно представить в следующем виде XX (t ) (1 G XX ) X (t ) G AXX g GOX GX (t ), YX (t ) GYZ X (t ) G AYX g GOY GY (t ), ZX (t ) GZY X (t ) G AZX g GOZ GZ (t ). Во время разворотов осуществим запись показаний всех трех каналов угловой скорости. Выражения для интегралов показаний угловых скоростей за время поворота ориентационного приспособления вокруг оси X против часовой стрелки имеют вид I X X X X (t )dt [(1 G XX ) X (t ) G AXX g GOX GX (t )]dt, 0 0 0 0 0 0 I YX YX (t )dt [GYZ X (t ) G AYX g GOY GY (t )]dt , I ZX ZX (t )dt [GZY X (t ) G AZX g GOZ GZ (t )]dt. Выражения для интегралов показаний угловых скоростей за время (41) (42) (43) поворота ориентационного приспособления вокруг оси X по часовой стрелке имеют вид I X X X X (t )dt [(1 G XX ) X (t ) G AXX g GOX GX (t )]dt, 0 I X Y 0 (44) 0 X Y (t )dt [GYZ X (t ) G AYX g GOY GY (t )]dt , (45) 0 0 0 I ZX ZX (t )dt [GZY X (t ) G AZX g GOZ GZ (t )]dt. (46) Разности значений интегралов (41) и (44), (42) и (45), (43) и (46) с учетом выражений (39) и (40) позволяют получить формулу для определения погрешности масштабного коэффициента ДУС канала X I XX I XX G XX 1, 2 360 n (47) и формулы для определения погрешности выставки оси X I XY I XY G XZ , 2 360 n (48) I XZ I XZ G XY , 2 360 n (49) 19 Последовательно, устанавливая ориентационное приспособление осями Y и Z вверх по направлению отвесной линии и осуществляя в каждой ориентации поворот за одно и то же время на один и тот же угол, кратный целому числу оборотов, можно получить формулу для определения погрешности масштабного коэффициента ДУС канала Y I YY I YY GYY 1, 2 360 n (50) и формулы для определения погрешностей выставки оси Y I YX I YX GYZ , 2 360 n GYX I YZ I YZ , 2 360 n (51) (52) формулу для определения погрешности масштабного коэффициента ДУС канала Z I ZZ I ZZ GZZ 1, 2 360 n (53) и формулы для определения погрешности выставки оси Z I ZX I ZX GZY , 2 360 n (54) I ZY I ZY GZX . 2 360 n (55) Таким образом, погрешность масштабного коэффициента канала ДУС, ось чувствительности которого ортогональна горизонтальной плоскости, может быть определена как отклонение от единицы отношения разностей (с учетом знаков) интегралов показаний канала ДУС за одно и то же время к удвоенному значению тестового угла поворота. Погрешности выставки осей чувствительности каналов ДУС могут быть определены как отношение разностей (с учетом знаков) интегралов показаний соответствующих каналов ДУС за одно и то же время к удвоенному значению тестового угла поворота. 20 Схема экспериментальной установки На массивном лабораторном столе расположено основание с гладкой рабочей поверхностью (рис. 5). Рабочая поверхность основания выставлена в горизонт. На рабочую поверхность основания положена линейка. Основание и линейка скреплены с лабораторным столом двумя струбцинами. На рабочей поверхности основания находится ориентационное приспособление отрезок стандартной трубы из материала сталь 35 сечением 50х50 мм толщиной 4 мм длиной 90 мм (рис. 6). В результате ручной лекальной операции обеспечена соответствующая плоскостность, параллельность и ортогональность граней и торцевых посадочных поверхностей ориентационного приспособления. Рис. 5. Схема экспериментальной установки Внутри ориентационного приспособления (рис. 6) размещен объект испытаний – устройство ArduPilot Mega v.2.6 (APM) [6], представляющее собой клон популярной платформы Arduino Mega 2560 на базе микроконтроллера Atmel ATMega 2560 [7] с подключенным по интерфейсу SPI микромеханическим ИИБ InvenSense MPU-6000 [1]. Устройство APM установлено в ориентационное приспособление без собственного корпуса (рис. 7). 21 Рис. 6. Ориентационное приспособление с объектом испытаний На одной из граней ориентационного приспособления выгравирован трехгранник XYZ, указывающий номинальное направление осей чувствительности акселерометров и датчиков угловой скорости ИИБ. Цифровая информация с инерциальных датчиков и встроенного канала измерения температуры ИИБ собирается микроконтроллером APM и передается в персональный компьютер (ПК) через стандартный кабель micro-USB. Через этот же кабель от ПК осуществляется электропитание устройства APM с микросхемой ИИБ. Обработка данных в экспериментальной установке производится на трех аппаратных уровнях: - первый (нижний) уровень – Digital Motion Processor (DMP), входящий в состав микросхемы ИИБ; - второй (средний) уровень – микроконтроллер устройства APM; - третий (верхний) уровень – управляющий ПК. Для управляющего ПК и микроконтроллера устройства АРМ написано специальное программное обеспечение на языках программирования C# и С++. Интерактивная программа руководит действиями оператора, осуществляет съем данных и обработку результатов измерений. 22 Рис. 7. Устройство APM, доработанное для установки в ориентационное приспособление. Кружком обозначена микросхема MPU-6000 Программно установлен диапазон измеряемых ускорений ±2 g. При этом номинальная цена единицы младшего разряда (дискретность) измеряемых ускорений при 16-разрядном АЦП преобразовании составляет 0,0005987 м/с². Программно установлен диапазон измеряемых угловых скоростей ±250 º/c. При этом номинальная цена единицы младшего разряда (дискретность) измеряемых угловых скоростей при 16-разрядном АЦП преобразовании составляет 0,00763 º/c или 27,5 º/ч, то есть превышает скорость вращения Земли. Программно установлена частота опроса данных примерно 50 Гц. Выставка ориентационного приспособления на нужную грань осуществляется вручную по подсказке персонального компьютера. Тестовый поворот ориентационного приспособления относительно нормали к основанию также осуществляется вручную по указанию персонального компьютера. 23 Выполнение эксперимента Исполняемый модуль интерактивной программы калибровки ИИБ calc_const_mpu6000.exe имеет объем 26 К. После вызова программы на исполнение на дисплее компьютера появится сообщение: Программа определения калибровочных констант ИИБ MPU-6000 v. 1.0 Прервать работу с потерей всех данных можно в любой момент времени одновременным нажатием клавиш <Ctrl> и <C>. Прервать процесс измерения можно нажатием клавиши <Esc>. Горизонтируйте основание. Подключите ИИБ к компьютеру USB кабелем. После подключения кабеля на устройстве APM в ориентационном приспособлении должен засветиться светодиод зеленого цвета. Если светодиод зеленого цвета не засветился, обратитесь к преподавателю. Далее появится сообщение: Введите серийный номер изделия: serial number <Enter> Серийный номер (до 12 позиций) передается в качестве части имени образующихся в результате испытаний файлов. Серийный номер должен быть введен обязательно. Следующее сообщение предложит: Выдержите ИИБ во включенном состоянии порядка 10 мин По готовности нажмите любую клавишу … Выдержка ИИБ во включенном состоянии порядка 10 мин позволяет исключить влияние на калибровку переходных процессов в объекте испытаний при включении. Далее компьютер предложит оператору: Провести измерения в 6 статических ориентациях < Y > или перейти к калибровке каналов ДУС интегральным методом < N >? Если выбрано < N >, то испытания в 6 статических ориентациях будут пропущены. Компьютер сразу перейдет к испытаниям каналов ДУС интегральным методом. Если выбрано < Y >, появится указание: Введите время накопления измерений в каждой ориентации, в секундах: … <Enter> 24 Никаких ограничений на время накопления измерений нет. Обычно время накопления измерений назначается начиная от 10 сек до нескольких сотен секунд. Время накопления измерений должно быть введено обязательно. После ввода времени накопления измерений появится указание: Установите ориентационное приспособление на горизонтальном основании осью X вверх По готовности нажмите любую клавишу… Далее компьютер издаст звуковой сигнал и появится сообщение с бегущей строкой в конце: Производится измерение……………. По истечении заказанного времени измерений бегущая строка остановится. Компьютер издаст звуковой сигнал. Далее компьютер предлагает оператору: Сохранить результат < Y > или повторить измерения < N > ? Если выбрано сохранение результата < Y >, компьютер предложит установить ориентационное приспособление в следующую ориентацию и произвести измерение в следующей ориентации. Если выбрано повторение измерения в той же ориентации < N >, то предыдущий результат будет отброшен и будет произведено повторение измерения. Указанный порядок действий будет продолжен до накопления измерений во всех 6 ориентациях. Для уменьшения погрешностей измерений рекомендуется устанавливать ориентационное приспособление на основание в одно и то же место. Во время измерения в каждой из 6 ориентаций происходит накопление «сырых» показаний ИИБ в шести разных файлах. Каждый файл представляет собой таблицу (массив) из 8 столбцов: - первый столбец – время после звукового сигнала о начале измерений, размерность мс; - второй, третий, четвертый столбцы – показания акселерометров X, Y, Z с четырьмя значащими цифрами после запятой, размерность м/с²; - пятый, шестой, седьмой столбцы – показания ДУС X, Y, Z с тремя значащими цифрами после запятой, размерность º/с; - восьмой столбец – показания канала температуры с одной значащей цифрой после запятой, размерность ºC. В конце каждого файла дается строка-подчеркивание. В предпоследней строчке каждого файла приводятся средние арифметические значения (англ. mean - среднее) 25 показаний акселерометров и ДУС. В последней строчке приводятся стандартные отклонения (англ. std – стандартное отклонение) показаний акселерометров и ДУС. По завершении измерений в каждой из шести ориентаций компьютер формирует таблицу с промежуточными результатами Ax : mean=…… std=…… Ay : mean=…… std=…… Az : mean=…… std=…… Wx : mean=…… std=…… Wy : mean=…… std=…… Wz : mean=…… std=…… В результате калибровки ИИБ в 6 статических ориентациях образуются 6 файлов: serialnumber_x_up.txt; serialnumber_x_dn.txt; serialnumber_y_up.txt; serialnumber_y_dn.txt; serialnumber_z_up.txt; serialnumber_z_dn.txt. Имена файлам программа присваивает автоматически. Имя каждого файла содержит серийный номер, введенный оператором в начале испытаний; наименование оси, в направлении которой осуществляется приложение тестового воздействия в виде ускорения силы тяжести. Сокращение в имени файла up (англ. up – вверх) означает ориентацию соответствующей оси чувствительности ИИБ вверх, а сокращение в имени файла dn (англ. down – вниз) – означает ориентацию соответствующей оси чувствительности вниз. Объем каждого файла составляет 48…49 К при времени накопления измерений 15 сек, и примерно 96…97 К при времени накопления измерений 30 сек. Средние арифметические значения показаний каналов акселерометров и каналов ДУС используются при вычислении калибровочных констант по формулам (3)…(38). В результате произведенных действий можно получить по три оценки смещения нуля в каждом из каналов акселерометров и ДУС. В итоговый Протокол испытаний передаются в качестве смещений нуля средние арифметические значения этих трех оценок. Наибольшие значения стандартных отклонений в каждом канале по измерениям в 6 ориентациях передаются в Протокол испытаний как значения общего уровня шума (СКО). После калибровки в 6 статических ориентациях завершается 1 этап калибровки. Программа выводит на дисплей значения всех калибровочных констант, которые передает в итоговый Протокол испытаний. 26 Далее компьютер предлагает оператору: Провести калибровку каналов ДУС интегральным методом < Y > или перейти к выводу результатов < N > ? Если оператор выбирает вывод результатов < N >, компьютер дает указание: Для выхода из программы нажмите любую клавишу … Если оператор выбирает калибровку интегральным методом < Y >, компьютер требует: Введите число оборотов при калибровке: … <Enter> Никаких ограничений на число оборотов нет. Но, учитывая, что при тестовых разворотах происходит скручивание кабеля micro-USB, число оборотов не рекомендуется назначать больше трех. Далее появится указание: Установите ориентационное приспособление на горизонтальном основании осью X вверх По готовности нажмите любую клавишу … Следующее указание: Приготовьтесь к вращению ориентационного приспособления на … оборота против часовой стрелки. По готовности нажмите любую клавишу … После звукового сигнала осуществите … оборота против часовой стрелки Для этого в исходном положении оператор должен прижать ориентационное приспособление к горизонтальному основанию и к линейке. Затем после звукового сигнала персонального компьютера оператор, прижимая ориентационное приспособление к горизонтальному основанию, должен осуществить поворот против часовой стрелки на целое назначенное число оборотов и до появления второго звукового сигнала персонального компьютера вернуть ориентационное приспособления в исходное положение. Для удобства работы на линейке нанесены риски по длине и по ширине ориентационного приспособления. Программа осуществляет накопление показаний между двумя звуковыми сигналами: для 1 оборота в течение 7 сек, для 2 оборотов в течение 12 сек, для 3 оборотов в течение 15 сек. Программа также контролирует, чтобы показания каналов ДУС во время поворота находились в пределах рабочего диапазона (в нашем случае ±250 °/с). Превышение показаниями канала ДУС рабочего диапазона сопровождается тревожным звуковым сигналом. Программа предлагает оператору повторить неудачный тестовый поворот. 27 Сразу после завершения каждого тестового разворота компьютер вычисляет и выводит на дисплей значения интегралов показаний ДУС за время разворота. Интегрирование показаний каналов ДУС осуществляется методом трапеций. Значения интегралов каналов ДУС используются для расчетов калибровочных констант по формулам (47)…(55). Далее компьютер спрашивает: Сохранить результат < Y > или повторить измерение < N >? При выборе < N > предусмотрена возможность повторения неудачного тестового поворота. При выборе < Y > компьютер указывает: Установите ориентационное приспособление на горизонтальное основание осью X вверх По готовности нажмите любую клавишу … Следующее указание: Приготовьтесь к вращению ориентационного приспособления на … оборотов по часовой стрелке По готовности нажмите любую клавишу … После звукового сигнала осуществите … оборота по часовой стрелке Поворот по часовой стрелке производится аналогично за то же время. После проведённого измерения программа спрашивает, передавать ли накопленные данные в обработку. Таким образом, предусмотрена возможность повторения неудачного тестового поворота. Во время измерений в каждом из 6 поворотов происходит накопление «сырых» показаний ИИБ в шести разных файлах serialnumber_x_cw.txt; serialnumber_x_ccw.txt; serialnumber_y_cw.txt; serialnumber_y_ccw.txt; serialnumber_z_cw.txt; serialnumber_z_ccw.txt. Имена файлам программа присваивает автоматически. Имя каждого файла содержит серийный номер, введенный оператором в начале испытаний; наименование оси, вокруг которой осуществляется тестовое вращение; направление вращения. Сокращение в имени файла cw (англ. clockwise – по часовой стрелке) означает вращение по часовой стрелке. Сокращение ccw (англ. counter clockwise – против часовой стрелки) - вращение против часовой стрелки. Объем каждого файла составляет при одном тестовом обороте примерно 23 К, а при двух тестовых оборотах 38…39 К. Каждый файл представляет собой таблицу (массив) из 8 столбцов: 28 - первый столбец – время от звукового сигнала о начале тестового разворота до звукового сигнала по истечении времени тестового разворота, размерность мс; - второй, третий, четвертый столбцы – показания акселерометров X, Y, Z с четырьмя значащими цифрами после запятой, размерность м/с²; - пятый, шестой, седьмой столбцы – показания ДУС X, Y, Z с тремя значащими цифрами после запятой, размерность º/с; - восьмой столбец – показания канала температуры с одной значащей цифрой после запятой, размерность ºC. После 6 тестовых разворотов завершается 2 этап калибровки. Результатом работы являются значения погрешностей масштабных коэффициентов и погрешностей выставки осей чувствительности каналов ДУС, которые программа выводит на дисплей и передает в итоговый Протокол испытаний. Окончательным результатом работы интерактивной программы калибровки ИИБ является файл под именем serialnumber_result.txt объемом 2 К. Файл представляет собой готовый для распечатки Протокол испытаний (рис. 8). Заголовок Протокола испытаний содержит название объекта испытаний – MPU-6000, заводской номер изделия, дату и время, которые соответствуют моменту начала работы программы и передаются из установок компьютера. Далее в Протоколе испытаний приведены фактически измеренные значения параметров каналов ДУС и каналов акселерометров ИИБ. В одну строчку с фактически измеренными значениями параметров в Протоколе испытаний приведены допуски в соответствии с [1]. При соответствии параметра допуску программа устанавливает в той же строчке знак < + >, а при несоответствии знак < - >. В завершении Протокола испытаний выделено место для подписей Представителей Заказчика, ОТК и производства. Распечатайте Протокол испытаний и включите в отчет о лабораторной работе. Приведите экспериментальную установку в исходное состояние. 29 ПРОТОКОЛ ИСПЫТАНИЙ ИИБ MPU-6000 зав.№ 29151 Дата 07.09.22 12:54 КАНАЛЫ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ Относительная погрешность масштабного коэффициента, б/р Gxx = -0,01949 Допуск = ±0.03 + Gyy = -0,00356 Допуск = ±0.03 + Gzz = -0,00176 Допуск = ±0.03 + Погрешность выставки осей чувствительности, б/р Gxz = -0,01378 Допуск = ±0.02 + Gxy = -0,00325 Допуск = ±0.02 + Gyz = 0,01520 Допуск = ±0.02 + Gyx = 0,00633 Допуск = ±0.02 + Gzy = 0,01148 Допуск = ±0.02 + Gzx = -0,00794 Допуск = ±0.02 + Смещение нуля, o/с Gox = 0,72911 Допуск = ±20 + Goy = 2,56893 Допуск = ±20 + Goz = 1,07202 Допуск = ±20 + Коэффициенты влияния кажущихся ускорений на смещение нуля, (o/с)/g Gaxx = 0,00488 Допуск = ±0.1 + Gaxy = -0,00231 Допуск = ±0.1 + Gaxz = 0,00099 Допуск = ±0.1 + Gayx = 0,00506 Допуск = ±0.1 + Gayy = -0,00157 Допуск = ±0.1 + Gayz = -0,00042 Допуск = ±0.1 + Gazx = 0,00506 Допуск = ±0.1 + Gazy = -0,00022 Допуск = ±0.1 + Gazz = 0,00276 Допуск = ±0.1 + Общий уровень шума (СКО),o/с Gstdx = 0,02089 Допуск = ±0.05 + Gstdy = 0,02244 Допуск = ±0.05 + Gstdz = 0,02559 Допуск = ±0.05 + КАНАЛЫ АКСЕЛЕРОМЕТРОВ Относительная погрешность масштабного коэффициента, б/р Axx = -0,00284 Допуск = ±0.03 + Ayy = 0,00910 Допуск = ±0.03 + Azz = 0,01313 Допуск = ±0.03 + Погрешность выставки осей чувствительности, б/р Axz = -0,00248 Допуск = ±0.02 + Axy = -0,01299 Допуск = ±0.02 + Ayz = 0,00390 Допуск = ±0.02 + Ayx = -0,00532 Допуск = ±0.02 + Azy = 0,00850 Допуск = ±0.02 + Azx = 0,00136 Допуск = ±0.02 + Смещение нуля,м/c2 Aox = 0,08362 Допуск = ±0.5 + Aoy = -0,19953 Допуск = ±0.5 + Aoz = -0,08358 Допуск = ±0.8 + Общий уровень шума (СКО), м/c2 Astdx = 0,00756 Astdy = 0,00782 Astdz = 0,01126 Представитель Заказчика____________________”__”________202__ г. Представитель ОТК_________________________”__”________202__ г. Представитель цеха_________________________”__”________202__ г. Рис. 8. Протокол испытаний ИИБ MPU-6000 30 Контрольные вопросы 1. Какие выходные данные вырабатывает микросхема инерциального измерительного блока MPU-6000? 2. Сколько и каких номиналов электропитания требуется для микросхемы MPU-6000? 3. Откуда поступает электропитание на микросхему MPU-6000 в данной лабораторной работе? 4. Какую максимальную мощность потребляет микросхема MPU-6000 при использовании всех ее ресурсов? 5. Каковы габариты корпуса микросхемы MPU-6000? 6. Какова скорость вращения Земли в размерностях º/ч и º/с? 7. Вычислите дискретности (цены единицы младшего разряда) каналов ДУС в каждом из четырех диапазонов? 8. Возможно ли определение скорости вращения Земли с помощью микросхемы MPU-6000? 9. Вычислите дискретности (цены единицы младшего разряда) каналов акселерометров в каждом из четырех диапазонов? 10. По полученному Протоколу испытаний какие параметры микросхемы MPU- 6000 выходят за пределы допусков, указанных в таблицах 1 и 2? 11. Каков рабочий температурный диапазон микросхемы MPU-6000? 12. К одиночным ударам какой предельной интенсивности устойчива микросхема MPU-6000? 13. В чем смысл интегрального метода калибровки каналов ДУС? Какие он дает преимущества перед обычным методом калибровки? 14. На основании Протокола испытаний и таблицы 1 сделайте вывод: являются ли все три канала акселерометров равноточными? 15. Какие допуски на неортогональность осей чувствительности акселерометров и ДУС в угловой мере приведены в таблицах 1 и 2? 31 Приложение 1 Общие требования к содержанию отчетов о лабораторных работах Отчеты о лабораторных работах должны содержать: - название лабораторной работы; - сведения о студенте (номер группы, фамилия, инициалы); - сведения о преподавателе (номер кафедры, должность, ученая степень, фамилия, инициалы); - название лабораторной работы; - цель лабораторной работы; - схему экспериментальной установки; - перечень используемого контрольно-испытательного оборудования с указанием основных характеристик; - план (последовательность) проведения эксперимента; - результаты измерений в виде таблиц по приведенной форме; - основные расчетные формулы; - результаты обработки экспериментальных данных в виде таблиц по приведенной форме и, там где это указано дополнительно, графиков; - анализ полученных результатов; - выводы по выполненной работе, раскрывающие поставленные в данной работе цели; - ответ на контрольный вопрос по указанию преподавателя. 32 Список литературы 1. https://invensense.tdk.com/products/motion-tracking/6-axis/mpu-6050/ 2. Попов Г.В. Микромеханические инерциальные датчики: лабораторный практикум. – Москва: Издательство МГТУ им. Н.Э.Баумана, 2015. –269, [3] c.: ил. 3. Попов Г.В., Перлина О.А. Измерение параметров и калибровка микромеханических инерциальных измерительных блоков // Авиакосмическое приборостроение.2014. № 12. С. 38-48. 4. Попов Г.В., Попов В.Г. Интегральный метод калибровки каналов угловых скоростей микромеханических инерциальных измерительных блоков. – Программа XLV Академических чтений по космонавтике памяти академика С.П.Королева, Секция 21, стр. 121. 5. Попов Г.В., Попов В.Г. Интегральный метод калибровки каналов угловых скоростей микромеханических инерциальных измерительных блоков // Авиакосмическое приборостроение, 2022, № 8, стр. 15-22. 6. https://www.arduino.cc/en/Guide/ArduinoMega2560 7. https://www.microchip.com/wwwproducts/en/ATMega2560