Д.С. Иванов (ИПМ им. М.В. Келдыша РАН)
реклама
")
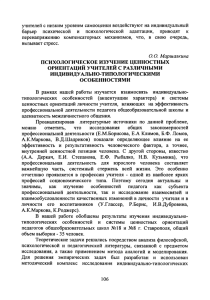
Моделирование и полунатурные испытания систем ориентации микроспутников на лабораторном стенде Н.А. Ивлев (ООО “СПУТНИКС”) - докладчик C.О. Карпенко (ООО “СПУТНИКС”) М.Ю. Овчинников (ИПМ им. М.В. Келдыша РАН) Д.С. Иванов (ИПМ им. М.В. Келдыша РАН) С.С. Ткачев (ИПМ им. М.В. Келдыша РАН) Микроспутник Чибис-М, разработка ИКИ РАН Миссия: Исследование физических процессов при атмосферных грозовых разрядах Масса: 36 кг Орбита: наклонение орбиты i=51.7º, высота орбиты h= ~ 500 км. Моменты инерции: Jx= 1.16 кг·м2, Jy= 1.61 кг·м2, Jz= 1.86 кг·м2. 2 Система ориентации и стабилизации Состав системы: Датчики определения ориентации: o Магнитометр, o Солнечный датчик, o Датчик угловой скорости. Исполнительные элементы: o Электромагнитные катушки, o Маховики. Бортовой компьютер. 3 Режимы управления и режимы определения ориентации Режим Датчики Управляющие органы Демпфирование угловой скорости Магнитометр Электромагнитные катушки Ориентация солнечных батарей на Солнце Солнечные датчики Маховики Стабилизация относительно орбитальной системы координат •Солнечные датчики, •Магнитометр, •Датчики угловой скорости Маховики Разгрузка маховиков •Солнечные •Маховики датчики, •Магнитометр, •Датчики угловой скорости •Электромагнитные катушки 4 Численное моделирование: алгоритм -B-dot (демпфирование угловой скорости) m kB 5 Численное моделирование: алгоритм маховичной стабилизации h KJ CQ DJCΩCco ΩCcw J CΩCcw h Численное моделирование: алгоритм маховичной стабилизации Ось X – значения коэффициента K, ось Y – значение коэффициента D, градация цвета показывает время, которое ушло на стабилизацию аппарата при заданных начальных условиях Ось X – модуль абсолютной угловой скорости, ось Y – модуль векторной части кватерниона ориентации связанной СО относительно орбитальной. Синяя область начальных условий, при выборе значений из которой стабилизация с использованием маховиков не гарантируется; красная - область начальных условий, при выборе значений из которой стабилизация с использованием маховиков гарантируется 7 Численное моделирование: алгоритм маховичной стабилизации Эксперименты на лабораторном стенде 9 Состав лабораторного стенда Макет малого космического аппарата (МКА); Имитатор магнитного поля; Имитатор Солнца; Аэродинамический подвес с управляемым арретиром; Система независимых измерений (видеокамера, инклинометр); Персональный компьютер; Имитаторы Грузоподъёмность Аэродинамический подвес Имитатор Солнца Имитатор магнитного поля Возможность поворота: 25 кг -относительно вертикальной оси 360° -относительно горизонтальных осей ±30° Мощность лампы 1000 Вт Угол раскрытия луча 12° Сила света 290000 кд Освещенность на расстоянии 1,55м 120700 лк Максимальная амплитуда генерируемого поля, без учёта магнитного поля Земли 160 000 нТл Дискретность реализации поля 50 нТл Размер стороны катушек 2м; 1,9м; 1,8м СКО генерируемого поля относительно заданной величины 100 нТл Диаметр сферы однородности, с неоднородностью поля: - По величине: менее 1%, - По направлению: менее 1°. 650 мм Зона однородности пары катушек имитатора магнитного поля Z=0.45мм Z=0.25мм Z=0.3мм Z=0.4мм Z=0.35мм Z=0.2мм Z=0.1мм Z=0.15мм Z=0.05мм Z=0мм X=0.25мм X=0.3мм X=0.4мм X=0.35мм X=0.2мм X=0.1мм X=0.15мм X=0.05мм X=0мм Состав макета ПК АБ АБ АБ Wi-Fi Одноплатный компьютер 12В USB Плата актуаторов АК X USB АК Y 12В 12В АК Z CPU USB ИНКЛ УДМ X0 УДМ Y0 УДМ Z0 УДМ X1 УДМ Y1 УДМ Z1 X1П USBCAN CAN X4П CPUBus Х3П FPGA CPUBus CPUBus Система ориентации и стабилизации (СОС); Крепёжная плита; Одноплатный компьютер с беспроводным каналом связи; Переходник USB-CAN; Источники питания (аккумуляторы); Плата питания Инклинометр; Система балансировки. FLASH K1 K2 K3 ЭМУ Х ЭМУ Y ЭМУ Z Х2П SPI СД МАГ ДУС +X ДУС +Y ДУС +Z БУСОС COC Обозначения Устройства макета Платы БУСОС Исполнительные элементы Датчики ориентации Ключи питания 13 Возможные области применения стенда Отработка систем ориентации различных подвижных объектов Калибровка датчиков (магнитометров, солнечных датчиков) Определение магнитного момента Определение моментов инерции и положения центра масс Обучение навыкам управления микроспутником 15