")
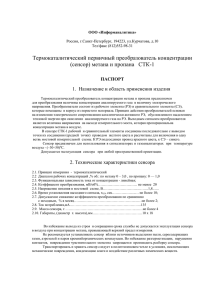
О применении акселерометра в датчиках давления Давление – одна из базовых физических величин, измерение которой требуется в большинстве систем управления техническими объектами. Виды измеряемого давления: - абсолютное - значение давления относительно вакуума; - избыточное - значение давления относительно давления окружающей среды (в большинстве случаев - относительно атмосферного давления); - дифференциальное - значение разности измеряемого и «опорного» давления. Для измерения давления используются датчики (измерительные преобразователи) давления (ДД) с различными видами выходного электрического сигнала. Наиболее распространенными видами выходного сигнала ДД являются: - постоянного тока от 4 до 20 мА, двухпроводная линия подключения; - постоянного тока от 4 до 20 мА, двухпроводная линия подключения, совмещенный с цифровым выходным сигналом по HART-протоколу; - постоянного тока от 4 до 20 мА, четырехпроводная линия подключения; - цифровой выходной сигнал по протоколу типа RS-485; - цифровой выходной сигнал по протоколу типа CAN. Конструкция чувствительных элементов (сенсоров) давления и силы, используемых многими изготовителями ДД в РФ приведены в Приложении 1. Конструкция приемников давления ДД (узла ДД в котором устанавливается сенсор давления или силы) приведены в Приложении 2. Для ДД важнейшей метрологической характеристикой является предел допускаемой суммарной относительной (приведенной) погрешности преобразования (измерения) давления, который, как правило, нормируется по отношению к верхнему пределу измерения (ВПИ) давления, обозначаемому как Рвпи, и состоит из нескольких составляющих – основной и дополнительных. Основная приведенная погрешность – базовая метрологическая характеристика ДД, определяется в НКУ, как правило нормируется в процентах по отношению к верхнему пределу измерения диапазона измеряемого давления (ВПИ), и, как правило – включает в себя нелинейность и вариацию (гистерезис) фактической характеристики выходного сигнала ДД по отношению к номинальной статической характеристике преобразования (НСХ) ДД. НСХ для подавляющего большинства ДД – линейная. Дополнительные приведенные погрешности – это погрешности, вызванные изменением характеристики выходного сигнала ДД под воздействием различных факторов – как правило – температуры измеряемой (контролируемой) среды и/или температуры окружающей среды, а также в общем случае вибрации, магнитных и электрических полей, наклонов и.т.д. Дополнительные приведенные погрешности также, как правило, нормируются в процентах к ВПИ и по отношению к единице измерений воздействующего фактора, например - дополнительная погрешность от температуры нормируется в % к ВПИ на каждые 10 °С изменения температуры. В современных ДД выходной электрический сигнал формируется после цифровой обработки сигнала (ЦОС) сенсора давления в электронном блоке (ЭБ) ДД. Целью цифровой обработки в ЭБ сигнала сенсора давления является минимизация суммарной погрешности преобразования давления для НСХ, реализуемой в ДД. ЦОС сенсора в ЭБ осуществляется микроконтроллером, реализующим НСХ как обобщенную функцию преобразования измеряемого давления Ризм вида Y(Pизм), которую в общем виде можно представить как сумму полиномиальных функций, использующих в качестве аргументов значения сигнала от сенсора, пропорциональный Ризм, а также значения электрических сигналов, зависящих от различных факторов, в том числе внешних воздействующих факторов (ВВФ): - напряжения электропитания Uпит; - температуры измеряемой среды Тизм; - температуры окружающей среды Токр; - виброускорения (в общем случае по трем осям) Ax, Ay, Az; - угла наклона (в общем случае по трем осям) αx, αy, αz; В функции Y(Ризм) также учитываются погрешности (нелинейности) преобразования Ризм, которые вносят компоненты ЭБ: - аналого-цифровой преобразователь (АЦП) - δацп; - цифро-аналоговый преобразователь (ЦАП) - δцап - для ДД с аналоговым выходным электрическим сигналом. В общем случае в функции Y(Ризм) необходимо учитывать изменение выходного сигнала ДД, обусловленное изменением во времени tэкспл (при эксплуатации) характеристик сенсора давления, конструкции ДД, характеристик электронной компонентной базы (ЭКБ), используемой в ДД. Для ДД специального исполнения также требуется учитывать воздействие на конструкцию ДД и ЭКБ факторов радиационных излучений Фрад и воздействия других специальных факторов Фспец. Таким образом, общий вид НСХ, описываемой обобщенной функцией преобразования давления Y(Ризм) можно представить аналитическим выражением вида (1). Y(Pизм) = f1(Ризм,Тизм,Токр,Uпит) + f2(Ax, Ay, Az) + f3(αx, αy, αz) + + f4(δацп,δцап,Токр,Uпит) + f5(tэкспл) + f5(Фрад) + f5(Фспец) (1) В качестве аргументов в функциях, составляющих обобщенную функцю преобразования давления Y(Ризм), используются данные от сенсоров или датчиков, или измерительных электрических цепей, измеряющих или преобразующих соответствующие физические или электрические величины, например: - датчики температуры для аргументов Тизм, Токр; - акселерометры для аргументов Ax, Ay, Az и αx, αy, αz. Определение вида функции преобразования Y(Ризм) и реализация этой функции в ДД, с учетом критерия «цена-качество», является нетривиальной и сложной математической и инженерной задачей, можно сказать - «ноу-хау» каждого изготовителя ДД, поэтому качество решения этой задачи фактически определяет тот факт, что на рынке ДД присутствует достаточно большое количество предприятий-изготовителей ДД, у каждого из которых имеются свои преимущества и недостатки. Разработчики и изготовители ДД используют различные конструктивные, аппаратные, программные способы, а также методы производственных испытаний для минимизации суммарной погрешности ДД путем минимизации основной погрешности и минимизации или устранения (компенсации) дополнительных погрешностей. Применение акселерометра в ДД необходимо для минимизации дополнительной относительной погрешности - γдопнакл - начального выходного сигнала (при нулевом измеряемом давлении Ризм=0), вызванной наклоном ДД. Использование ДД по условиям их движения при эксплуатации можно условно разделить на «статическое» использование и «динамическое» использование. «Статическое» использование ДД – в случае, если ДД, подключенный к магистрали давления – неподвижен в процессе эксплуатации. Это характерно для ДД общепромышленного назначения в наземных системах управления, установленных на неподвижных магистралях давления, проложенных стационарно «на земле». Если ДД неподвижен при эксплуатации, то значение γдопнакл – величина постоянная (может даже быть нулевой) и определяется проекцией центра масс измерительной мембраны в конструкции ДД на плоскость, перпендикулярную оси монтажа. В конструкции подавляющего большинства ДД (соответственно - в руководствах по эксплуатации) как правило, предусмотрена процедура регулировки («подстройки») начального выходного сигнала, которая учитывает постоянный статический наклон ДД и минимизирует (в идеале «обнуляет») значение γдопнакл. «Динамическое» использование ДД – в случае, если ДД, подключенный к магистрали давления, установлен на движущемся объекте (на движущейся конструкции) и в процессе эксплуатации подвергается изменяющимся наклонам: - для наземных движущихся объектов (конструкций) – это статические продольные и бортовые наклоны, динамическая продольная и бортовая качка, сочетание этих видов наклонов и качки, а также вращения; - для морских движущихся объектов – это статические килевые (продольные) и бортовые наклоны, динамическая килевая и бортовая качка, сочетание этих видов наклонов и качки, а также вращения; - для воздушных движущихся объектов – это статические наклоны по тангажу (продольные) и крену (бортовые), качка по тангажу и крену (динамические наклоны), сочетание этих видов наклона и качки, а также вращения; Для каждого из этих случаев имеется своя специфика в части значений углов наклона или диапазона изменения углов наклона, а также ускорений, возникающих при движении – можно выделить три основных варианта движения результирующего вектора ускорения центра масс (ЦМ) ДД относительно оси первоначального монтажа (без учета аварийных ситуаций): 1) движение по «конусу» (в трех плоскостях с ограничением значений вектора ускорения ЦМ ДД) - как пример - это отклонение наземной конструкции (трубопровода с ДД, смонтированном на вертикальной мачте) под действием ветровых нагрузок или ДД на неподвижной морской платформе (бортовая качка в любом направлении). Для медленноменяющихся наклонов этот вариант движения может быть заменен эквивалентным набором статических наклонов при калибровке ДД и испытаниях ДД в процессе производства; 2) движение в трех плоскостях с ограничением значений вектора ускорения ЦМ ДД по вертикали – это наземные транспортные средства, морские суда, БПЛА, когда «переворот» - это авария; 3) движение во всех трех плоскостях с любым знаком вектора ускорения ЦМ ДД (в том числе «с переворотом») - это свободно маневрирующий в трехмерном пространстве объект – например самолет или подводный аппарат. Для датчиков разности давлений (датчиков дифференциального давления) изменение положения ДД в пространстве более всего влияет на погрешность (точность) измерения давления. В большинстве датчиков разности давлений (датчиков дифференциального давления) используется приемник давления, в котором: - установлен сенсор силы, воздействие на который передает шток, закрепленный на разделительных мембранах, - используется заполнение внутреннего объема между мембранами разделительной жидкостью для выполнения требований к обеспечению стойкости при перегрузке по давлению и обеспечению стойкости к воздействию измеряемых (рабочих) сред. Наклон (ускорение) ДД вызывает дополнительную деформацию измерительных мембран мембранного блока приемника давления, которая передается через шток на мембрану сенсора силы, дополнительно к деформации, вызванной измеряемой разностью давлений. Эти особенности конструкции приемников давления обуславливают наличие дополнительной погрешности γдопнакл и ее большое влияние на суммарную погрешность (точность) ДД. Для датчиков абсолютного и избыточного давления прямого действия (без использования разделительной среды в приемнике давления), у которых в качестве сенсора (первичного преобразователя) используется сенсоры (тензопреобразователи) мембранного типа влияние наклонов существенно меньше и как правило, проявляется для ДД с ВПИ менее 2,5 МПа. Наличие γдопнакл в таких ДД обусловлено конструкцией мембран, жесткостью мембран сенсора. Наклон (ускорение) ДД вызывает дополнительную деформацию деформацию мембраны и деформацию чувствительного элемента сенсора, дополнительно к деформации, вызванной измеряемым давлением. Использование в ДД общепромышленного транспортного и морского исполнения акселерометров, например, интегральной микросхемы (ИМС) акселерометра типа LIS2DW12 (ф. ST Microelectronics) позволяет минимизировать составляющую дополнительной погрешности, вызванной наклонами ДД применение ДД в жестких условиях эксплуатации. γдопнакл и обеспечить ИМС LIS2DW12 имеет следующие основные технические характеристики, которые соответствуют требованиям, которые предъявляют разработчики ДД: - акселерометр является трехосевым (реализовано одновременное измерение ускорения по трем координатным осям) и обеспечивает однозначное определение угла наклона и ускорения объекта в пространстве; - цифровой выходной сигнал стандартов I2C/SPI обеспечивает совместимость с микроконтроллерами, осуществляющими ЦОС в ДД; - большая разрядность выходного сигнала -14 бит (у ИМС LIS2DH12 - 12 бит), что существенно для обеспечения класса точности ДД не более 0,15; - малая потребляемая мощность (ток потребления около 90 мкА при напряжении электропитания 1,8 В на максимальной частоте опроса 1600 Гц при разрядности 14 бит), позволяющий применять ИМС в ДД с выходным сигналом от 4 до 20 мА по двухпроводной схеме подключения, для которой суммарный ток потребления ДД, как правило, не должен превышать 3,6 мА; - низкий уровень шумов; - возможность программной перестройки диапазона измерения ускорений по осям с пределами значения диапазона ± 2g; ± 4g; ± 8g; ± 16g; - возможность программной перестройки частоты опроса (считывания) выходного сигнала от 1,6 Гц до 1600 Гц, что позволяет выполнять как «мгновенное», так и «интегральное» измерение ускорений, при этом требуется учитывать, что в ИМС используются сигма-дельта АЦП, поэтому при большей частоте опроса разрядность цифрового выходного сигнала снижается, если требуется максимальная точность данных измерений ускорений, то обмен данными производится на минимальной частоте; - возможность самотестирования исправности; - возможность использования выходного сигнала ИМС для «выделения», при необходимости, виброускорений и ударных ускорений, путем специальной программной обработки данных; - имеет встроенный датчик температуры; - диапазон рабочих температур от минус 40 °С до плюс 80 °С - позволяет применять ИМС для большинства ДД общепромышленного, транспортного и морского исполнения; - стойкость к ударным нагрузкам до 3000 g длительностью до 0,5 мс; - конструктивное исполнение - малогабаритный корпус типа LGA-12 с размерами (2,0 х 2,0 х 0,7) мм, пригодный для поверхностного монтажа на плату в электронном блоке ДД; - сравнительно низкая цена; - доступность для закупки и приемлимые сроки поставки. Для ДД, которые эксплуатируются в «статическом» состоянии и при медленноменяющихся наклонах, достаточно диапазона измерения ускорений по осям ± 2g, а при эксплуатации ДД в условиях быстроменяющихся наклонов по всем трем осям достаточно диапазона измерения ускорений по осям ± 4g, при этом ИМС LIS2DW12 позволяет увеличить диапазон измерения ускорений по осям при необходимости (при наличии резких ускорений и торможений объекта, на котором смонтирован ДД),. Для датчиков дифференциального давления (разности давлений) с использованием сенсора силы и разделительной среды в приемнике давления, влияние наклонов ДД существенно при эксплуатации ДД и в условиях статического положения ДД и при динамическом изменения положения ДД, поэтому для обеспечения метрологических характеристик ДД обязательным условием является использование акселерометра в конструкции ДД для минимизации дополнительной погрешности, вызванной наклоном ДД. Для датчиков абсолютного и избыточного давления прямого действия (без использования разделительной среды в приемнике давления), у которых в качестве сенсора (первичного преобразователя) используется сенсоры (тензопреобразователи) мембранного типа, влияние наклонов на погрешность ДД существенно меньше и для ДД с ВПИ более 2,5 МПа использование акселерометра в конструкции ДД необходимо только для высокоточных ДД. В таблице 1 приведены данные оценки предела γдопнакл по результатам измерения выходного сигнала различных моделей приемников разности давлений при наклонах в НКУ при нулевой разности измеряемого давления при отсутствии акселерометра и при использовании акселерометра при обработке выходного сигнала приемника давления. Таблица 1 – Оценка дополнительной погрешности измерения давления от наклонов ДД для приемников разности давлений (определение Кр см. Приложение 2) предел γдопнакл Модель приемника давления Модель 1 Pmax = = 10 кПа Модель 2 Pmax = = 40 кПа Модель 3 Pmax = = 250 кПа ВПИ, кПа Кр прибл 0,63 1,0 1,6 2,5 4 6,3 10 16 25 40 63 100 160 250 15 10 6 4 2,5 1,5 1 2,5 1,5 1 4 2,5 1,5 1 , в % от ВПИ без акселерометра с акселерометром при наклоне ± 15º при наклоне ± 45º при наклоне ± 15º при наклоне ± 45º 26 20,5 15,1 12,5 7,3 3,1 1,5 20,1 2,3 0,8 0,9 0,65 до 0,39 до 0,21 56 42,7 35,2 23,4 15,4 5,9 3,7 13,9 5,8 1,9 1,9 1,2 до 0,8 до 0,5 0,07 0,05 0,035 0,02 0,017 0,012 0,01 0,04 0,015 0,01 0,012 0,01 до 0,01 до 0,01 0,1 0,08 0,06 0,04 0,03 0,025 0,02 0,06 0,03 0,02 0,02 0,018 до 0,015 до 0,01 В таблице 2 приведены, данные оценки предела γдопнакл по результатам измерения выходного сигнала при наклонах приемников давлений в НКУ при отсутствии акселерометра и при использовании акселерометра при обработке сигнала от различных моделей приемников абсолютного и избыточного давления. Таблица 2 – Оценка дополнительной погрешности от наклонов ДД для приемников избыточного и абсолютного давления (определение Кр см. Приложение 2) Вид давления Модель приемника давления Абсолютное Модель 1 Pmax = = 400 кПа Абсолютное Модель 2 Pmax = = 600 кПа Избыточное Модель 3 Pmax = = 1 МПа предел γдопнакл , в % от ВПИ без акселерометра ВПИ, кПа Кр прибл 40 160 250 400 40 160 600 100 250 400 1000 с акселерометром при наклоне ± 15º при наклоне ± 45º при наклоне ± 15º при наклоне ± 45º 10 2,5 1,5 1 15 0,5 0,25 0,15 0,07 0,05 1,1 0,4 0,25 0,16 0,09 0,06 0,025 0,015 0,003 0,025 0,11 0,05 0,03 0,006 0,045 4 1 10 4 2,5 1 0,03 0,01 0,18 0,06 0,05 0,03 0,06 0,02 0,4 0,13 0,1 0,07 0,007 0,001 0,01 0,005 0,003 0,001 0,013 0,003 0,02 0,01 0,007 0,005 Вывод: Опыт разработки, изготовления и эксплуатации датчиков давления общепромышленного, транспортного и морского исполнения показал, что для обеспечения требуемых метрологических характеристик при изменении пространственного положения датчиков требуется применение акселерометра: 1) в конструкции датчиков разности давлений с приемниками давления мембранного типа и 2) в конструкции датчиков абсолютного и избыточного давления с ВПИ не более 2,5 МПа; 3) в конструкции высокоточных (класса точности 0,15 и менее) датчиков абсолютного и избыточного давления. Для ДД общепромышленного, транспортного и морского исполнения требуемые метрологические характеристики при изменении пространственного положения датчиков могут быть обеспечены применением интегрального акселерометра LIS2DW12 (ф. ST Microelectronics). Приложение 1 Описание КНС-сенсоров датчиков давления Сенсор (первичный преобразователь) - это элемент ДД, который непосредственно преобразует физическую величину - давление - в электрический сигнал. В ДД широко используются сенсоры на основе чувствительного элемента (ЧЭ) кристалла, изготавливаемого по микроэлектронной технологии из исходных структур «кремний на сапфире» (КНС). Выбор материала сапфир в качестве подложки для структуры «кремний на сапфире» обусловлен тем, что монокристаллический сапфир является диэлектриком (изолятором) с коэффициентом теплового расширения близким к коэффициенту теплового расширения кремния. При производстве ЧЭ используются методы группового изготовления по технологии микроэлектроники. Тензочувствительные резисторы, сформированные в эпитаксиальном слое кремния структуры КНС на кристалле ЧЭ, электрически соединены металлизацией по схеме «мост Уитстона» и топологически размещены на определенном расстоянии от центра кристалла – в зоне расчетной деформации. Чувствительный элемент (кристалл) с тензорезисторами жестко установлен на измерительную мембрану сенсора, непосредственно деформирующуюся при воздействии на нее преобразуемого давления рабочей среды в полости сенсора давления мембранного типа или преобразуемой силы перемещения рычага сенсора силы мембранно-рычажного типа. Деформация мембраны передается на ЧЭ, в кристалле ЧЭ появляются механические напряжения, соответственно деформируются тензорезисторы, размещенные в зоне деформации. Тензорезисторы в виде меандра на кристалле топологически ориентированы таким образом, что при механических напряжениях в кристалле при деформации ЧЭ под воздействии давления одна пара тензорезисторов подвергается деформации на растяжение (тангенциальные тензорезисторы) и посредством тензоэлектрического эффекта увеличивает свое сопротивление, а другая пара тензорезисторов подвергается деформации на сжатие (радиальные тензорезисторы) и посредством тензоэлектрического эффекта уменьшает свое сопротивление и, соответственно электрическому подключению тензоерзисторов, возникает разбаланс мостовой схемы ΔR. Значение выходного сигнала мостовой схемы (выходное напряжение) пропорционально значению ΔR и пропорционально значению электрического тока, протекающего через мостовую схему. Сенсоры КНС (тензопреобразователи) для измерения избыточного и абсолютного давления состоят из кристалла, напаянного на титановую мембрану, штуцера для установки в корпус ПД, коллектора для присоединения выводов от ЧЭ и электрического соединения сенсора с ЭБ. Сенсор давления мембранного типа (в разрезе) показан на рисунке 1. П е р в. п р и м е н . 1 2 3 4 6 В за м . и н в. № И н в. № дуб л . П о д п и сь и д а т а С п р а в. № 5 И н в. № п о дл . П о д п и сь и д а т а 1 – Внешние выводы тензопреобразователя 2 – Коллектор, изолирующий и фиксирующий внешние выводы. 3 – ЧЭ (на основе КНС структуры) установленный на мембрану 4 – Мембрана 5 – Втулка 6 – Штуцер И з м Л. и с т № д о ку м . Р а зр а б . П р о в. Т . ко н т р . Н а ч. К Б Н . ко н т р . У т в. Лит . М а сса М а сш т а б П одп. Д ат а 1 :4 Л и ст 1 Л и ст о в 1 Форм ат А3 Рисунок 1 – Устройство тензопреобразователя мембранного типа Сенсор (тензопреобразователь) силы имеет мембранно-рычажную конструкцию. На рисунке 2 показан тензопреобразователь силы мембранно-рычажного типа в разрезе. 1 2 3 4 5 1 – ЧЭ (на основе КНС структуры) установленный на мембрану 2 – Коллектор, изолирующий и фиксирующий внешние выводы 3 – Втулка 4 – Мембрана с рычагом 6 – Корпус тензопреобразователя Рисунок 2 – Устройство сенсора (тензопреобразователя) силы мембраннорычажного типа Приложение 2 Описание конструкции приемников давления в ДД Приемник давления - это конструктивный узел ДД, включающий сенсор и элементы конструкции ДД, обеспечивающие крепление сенсора и защиту сенсора (например, от перегрузки давлением, агрессивных сред, воздействия климатических и механических ВВФ). Элементы конструкции ДД вносят существенный вклад в метрологические (систематические и случайные погрешности, гистерезис и временная стабильность) характеристики и эксплуатационные параметры датчика давления. Основной характеристикой приемника давления является значение верхнего предела преобразования давления Pmaх (абсолютного, избыточного или дифференциального – в зависимости от типа приемника давления) для которого нормируются параметры выходного сигнала, нелинейности, вариации, долговременной стабильности, допустимой перегрузки, основной и дополнительных приведенных (по отношению к Pmaх) погрешностей, а также других параметров, определяемых изготовителем приемника давления. При применении приемников давления в ДД используется параметр, часто называемый как «коэффициент перестройки диапазона», который можно определить как отношение Кр=Pmax/Pвпи. Применение праметра Кр связано с тем, что изготовители приемников давления выпускают, как правило, приемники давления с значениями Рmax не для всего ряда значений верхних пределов по ГОСТ 22520-85, поэтому изготовителями ДД, использующими приемники давления с определенным Рmax, устанавливается значение ВПИ (Рвпи) равное или меньшее, чем Рmax. При этом погрешности ДД в большинстве случаев изготовителями определяются с учетом значения Кр. При Кр=1, как правило погрешности минимальные, а при больших Кр погрешности могут значительно отличаться в сторону увеличения. Значение Кр для современных ДД изменяется от 10 для бюджетных моделей до 40 у наиболее совершенных моделей ДД. Типовая конструкция приемника давления датчиков избыточного и абсолютного давления на основе сенсоров давления мембранного типа (типа Д) показано на рисунке 1. П - штуцер ДД для подключения к магистрали давления Р - корпус сенсора давления С - мембрана сенсора давления Рисунок 1 – Конструкция (пример) приемника давления ДД избыточного и абсолютного давления Устройство мембранного блока приемника разности давлений (дифференциального давления) показано на рисунке 2а. Устройство приемника разности давлений на основе мембранного блока показано на рисунке 2б. 1 – Гермоввод 2 – Штуцер выводной 3 – Сенсор (тензопреобреобразователь) силы 4 – Приемная мембрана измеряемого далвения Р+ 5 – Тяга штока 6 – Стальной шарик для герметизации внутренней полости 7 – Корпус мембранного блока 8 – Винт фиксации шарика 1 - Гермоввод 2, 7 - Приемные мембраны (Р+ и Рсоответственно) 3 – Полость (Р+) с измеряемой средой, имеющей большее давление 4,8 – Уплотнение 5 – Корпус мембранного блока 6 – Полость (Р-) с измеряемой средой, имеющей меньшее давление а) устройство мембранного блока приемника разности давлений б) устройство приемника разности давлений с мембранным блоком Рисунок 2 – Приемник разности давлений Сенсор силы 3 мембранно-рычажного типа размещен внутри корпуса 7 в замкнутой полости, заполненной кремнийорганической жидкостью и отделен от измеряемой среды металлическими гофрированными мембранами 4. Мембраны 4 приварены шовнороликовой сваркой по наружному контуру к корпусу 7 и соединены между собой центральным штоком, который связан с концом рычага сенсора (тензопреобразователя) силы 3 с помощью тяги 5. Большее давление Р+ подается на мембрану, обозначенную на рисунке знаком «+», меньшее давление Р- (опорное) – на мембрану, обозначенную на рисунке знаком «–». Разность давлений (ΔР = Р+ - Р-) вызывает перемещение тяги штока 5, обуславливающее воздействие поперечной силы на мембрану сенсора силы 3, деформацию этой мембраны и пропорциональное изменение сопротивления тензорезисторов, определяющее соответствующий выходной электрический сигнал. Электрический сигнал поступает в электронный блок ДД через гермоввод 1. Мембранный блок выдерживает без разрушения воздействие односторонней перегрузки рабочим избыточным давлением. Это обеспечивается тем, что при перегрузке одна из мембран 4 ложится на профилированную поверхность корпуса 7. Мембранный блок приемника разности давления (без установленного сенсора) показан на рисунке 3. * Размеры для справок. - профиль мембран выполнен штамповкой. - толщина мембран - в зависимости от исполнения от 0,05 до 0,07 мм. - высота гофры мембран до 2 мм. Рисунок 3 – Мембранный блок приемника разности давления (без установленного сенсора) Внешний вид мембранного блока приемника установленного сенсора) показан на рисунке 4. разности давления Рисунок 4 – Мембранный блок приемника разности давления (без установленного сенсора) (без Пример конструкции приемника разности давлений приведен на рисунках 5, 6. Приемник разности давлений имеет две идентичные рабочие полости, образованные фланцами, стягивающими мембранный блок. Давление контролируемой (рабочей) среды в каждой из рабочих полостей передается на соответствующую мембрану мембранного блока. Контролируемая (рабочая) среда в рабочей полости (РП) раздельно контактирует с деталями П, Р, так как фланец П по краю РП отделен прокладкой В от мембраны Р. В - уплотнение мембраны приемника давления П - фланец приемника давления Р - мембрана приемника давления РП - рабочая полость (камера) приемника давления С - штуцер для подключения к магистрали давления Я - втулка Элементы, Т, У, Ф, Ц, Ч, Я из состава дренажного клапана. Вид Б показан на рисунке 6 Рисунок 5 – Элементы конструкции ДД разности давления РП - рабочая полость (камера) приемника давления В - уплотнение мембраны приемника давления П - фланец приемника давления Р - мембрана приемника давления Рисунок 6 – Элементы конструкции ДД разности давления (вид Б на рисунке 5)