silin-l-f-projektirovanije-asinkhro-451565250
реклама

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Красноярский государственный технический университет
Л. Ф. Силин
ПРОЕКТИРОВАНИЕ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Красноярск 2002
УДК 621.313.323
С36
Рецензенты:
С. П. Жуков, канд. техн. наук, доцент кафедры электротехники Сибирского
государственного технологического университета;
А. В. Бастрон, канд. техн. наук, доцент, зав. кафедрой электроснабжения
сельского хозяйства Красноярского государственного аграрного университета
Силин, Л. Ф.
С36
Проектирование асинхронных двигателей: Учеб. пособие / Л. Ф.
Силин. Красноярск: ИПЦ КГТУ, 2002. 236 с.
ISBN 5-7636-0447-4
Рассмотрены основные вопросы инженерного проектирования асинхронных
двигателей общего назначения с короткозамкнутым или фазным ротором
номинальной мощностью 400 кВт. В качестве базовой модели объекта
проектирования приняты двигатели серии 4А и АИ.
Предназначено для студентов специальности 180400 «Электропривод и
автоматика промышленных установок и технологических комплексов» всех форм
обучения.
ISBN 5-7636-0447-4
УДК 621.313.323
КГТУ, 2002
Л. Ф. Силин, 2002
Редактор Т. И. Тайгина
Гигиенический сертификат № 24.49.04.953.П.000338.05.01 от 25.05.2001.
Подп. в печать 22.07.2002. Формат 6084/16. Бумага тип. № 1. Офсетная печать.
Усл. печ. л. 13,5. Уч.-изд. л. 12,0. Тираж 250 экз.
Заказ
С 206
Отпечатано в ИПЦ КГТУ
660074, Красноярск, ул. Киренского, 28
3
ВВЕДЕНИЕ
Асинхронные двигатели являются основным видом преобразователей электрической энергии в механическую вследствие относительно простой конструкции и низкой стоимости в сочетании с хорошими энергетическими характеристиками и высокой надежностью
при минимальном обслуживании.
В пособии рассмотрены основные вопросы учебного проектирования асинхронных двигателей общего назначения средней мощности (до 400 кВт включительно) на напряжение до 1000 В. Такие
машины составляют около 90 % всего парка электродвигателей
страны по количеству и примерно 55 % по мощности. При этом
машины мощностью от 0,75 до 100 кВт потребляют более 90 % от
общего потребления электроэнергии всеми асинхронными двигателями, составляющего около 40 % вырабатываемой в стране электроэнергии. Вследствие особо важной роли асинхронных двигателей
общего назначения в электроприводе к таким машинам предъявляют жесткие технико-экономические требования.
Высокая эффективность новых проектируемых электродвигателей достигается в основном снижением эксплуатационных расходов
за счет повышения надежности работы и улучшения энергетических
показателей без существенного увеличения затрат на изготовление
машины, что возможно при рациональном соотношении главных
размеров активных частей машины; применении современных магнитных, проводниковых и изоляционных материалов; грамотном выборе удельных нагрузок активных материалов. Стоимость двигателя
уменьшается за счет технологичности конструкции; унификации отдельных деталей и узлов при разработке серий электрических машин; уменьшения материалоемкости; снижения трудоемкости штамповочных, механических, обмоточных и изолировочных операций.
Поэтому проектирование асинхронного двигателя включает
расчеты, подтверждающие работоспособность и получение близких
к заданным эксплуатационных характеристик машины, и разработку
конструкции, обеспечивающей достаточную надежность при минимальных затратах материалов и трудоемкости изготовления с учетом
возможностей современного технологического оборудования. Обычно при проектировании нового двигателя используют ранее разработанные конструкции подобных электрических машин. В учебном
пособии в качестве базовой принята конструкция основного исполнения двигателей наиболее распространенных серий 4А и АИ.
4
1. ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ.
СОСТАВ ПРОЕКТА. ОБЩИЕ РЕКОМЕНДАЦИИ
Задание на проектирование содержит номинальные данные
проектируемого двигателя; требования к исполнению по степени защиты от воздействия окружающей среды, способам охлаждения и
монтажа; сведения об установочно-присоединительных размерах.
Задание на проект следует составить в соответствии с заданным номером варианта по приведенной в прил. 2 форме.
Студентам дневной формы обучения номер варианта, базовую
модель (серии 4А или АИР) и тип двигателя (с короткозамкнутым
или фазным ротором) задает преподаватель.
Студенты заочного факультета при отсутствии указаний преподавателя проектируют асинхронный двигатель с короткозамкнутым
ротором и выбирают номер варианта по двум последним цифрам
учебного шифра. В этом случае студентам заочного факультета рекомендуется принимать в качестве базовой серию 4А по четным
годам и серию АИР – по нечетным.
Основные номинальные технические данные проектируемого
двигателя следует выбрать по прил. 3, 4 в соответствии с номером
варианта, базовой серией и типом двигателя. При отсутствии в
прил. 3, 4 энергетических характеристик КПД ηН и коэффициента
мощности CosφН двигателя выбранной базовой серии (например, 4А),
значения ηН и CosφН следует принять по данным второй базовой
серии (АИР) для того же варианта задания.
Высота оси вращения, номинальное напряжение и другие данные двигателя, необходимые для разработки задания на курсовой
проект, могут быть получены в процессе ознакомления с устройством базовой модели двигателя в главах 2, 3, 4.
Эксплуатационные характеристики проектируемого двигателя,
не указанные в задании на проектирование: кратность максимального и пускового моментов, кратность пускового тока – должны соответствовать требованиям государственного стандарта.
В процессе разработки задания проектировщик должен составить четкое представление о конструкции и способе охлаждения
проектируемого двигателя; материалах, применяемых для изготовления сердечников и обмоток; устройстве сердечников; типах, схемах
и изоляции обмоток. При выборе схем обмоток следует отдавать
предпочтение обмоткам для механизированной укладки.
Курсовой проект состоит из расчетной и графической частей.
5
С о с т а в р а с ч е т н о - п о я с н и т е л ь н о й з а п и с к и:
титульный лист (прил. 1), задание на проект (прил. 2), график выполнения проекта, содержание, расчетная часть, список использованных источников.
В р а с ч е т н о й ч а с т и приводится окончательный вариант
расчетов, содержащий необходимые пояснения, формулы, численные
величины, эскизы пазов статора и ротора с размерами, графики рабочих и пусковых характеристик. Обоснования принятых решений
и пояснения следует формулировать грамотно и излагать ясно и
кратко. Расчеты следует выполнять в Международной системе единиц измерения физических величин (СИ). Допускается использование (в основном для определения размеров) кратных и дольных
единиц от исходных единиц измерения СИ. Для выполнения расчетов целесообразно использовать программу “Mathcad”.
При конструктивной разработке двигателя и выполнении графической части проекта следует дополнительно использовать источники /1–7/ по приведенному в конце пособия списку литературы.
Г р а ф и ч е с к а я ч а с т ь состоит из трех листов чертежей
формата А1 (594 841 мм), выполненных с помощью чертежных инструментов.
Лист 1. Общий вид двигателя в двух проекциях с простановкой размеров и позиций спецификации. На чертеже выполнить необходимые сечения и разрезы, позволяющие детально показать
внутреннее устройство и крепление основных частей и элементов
конструкции двигателя. Спецификацию желательно поместить на
этом же листе, при отсутствии места на чертеже спецификацию
включить в расчетно-пояснительную записку.
Лист 2. Для двигателя с фазным ротором начертить схемыразвертки обмоток статора и ротора, поперечные сечения пазовых
частей обмоток с размерами и позициями спецификации, поместить
спецификации пазов статора и ротора. Для машин с короткозамкнутым ротором исключить из приведенного перечня схему обмотки
ротора и спецификацию паза ротора. Начертить схему питания фазы обмотки статора от преобразователя частоты.
Лист 3. Графики рабочих и пусковых характеристик. На графиках следует нанести сетку, проградуировать оси координат, проставить обозначения и единицы измерения величин.
Чертежи 2 и 3 можно выполнить на листах миллиметровой бумаги соответствующего формата. Оформление проекта должно соответствовать требованиями ЕСКД и источников /13, 14/.
6
2. СЕРИИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Серия – это ряд машин разной мощности с близкой или одинаковой конструкцией и технологией производства. Высокий уровень унификации и стандартизации серийного производства позволяет уменьшить трудоемкость производства двигателей за счет применения прогрессивных технологических процессов с высокой степенью механизации и автоматизации. При ограниченном количестве
деталей и узлов серия содержит широкий ряд двигателей с большим числом ступеней мощности.
Для унификации и взаимозаменяемости элементов электротехнического оборудования у асинхронных двигателей современных серий стандартизованы шкала мощностей и установочно-присоединительные размеры. Соответствующие стандарты СССР и России составлены с учетом публикаций Международной электротехнической
комиссии (МЭК), разрабатывающей рекомендации по стандартизации
параметров и характеристик электротехнических изделий. Необходимость международной стандартизации в этой области обусловлена
широким развитием международной торговли электротехническим и
промышленным оборудованием.
Серия состоит из основного (базового) исполнения двигателей
и ряда модификаций и специализированных исполнений.
Двигатели основного исполнения соответствуют общим требованиям электропривода и служат двигателями общего назначения.
Это трехфазные асинхронные двигатели с короткозамкнутым ротором. Режим работы продолжительный (S1). Обмотка статора включается в сеть переменного тока c частотой 50 Гц. Номинальное напряжение и число выводных концов приведены в табл. 2.1.
Таблица 2.1
Номинальные напряжения асинхронных двигателей общего назначения
Номинальная
Номинальное
Число выводных концов
мощность, кВт
напряжение, В
обмотки статора
до 0,37
220 или 380
3 (6 по заказу потребителя)
0,55 – 11
220, 380, 660
3 (6 по заказу потребителя)
15,0 – 110
220/380* , 380/660
6
132 – 400
380/660
6
* Только для двигателей серии 4А.
При трех выводных концах обмотку статора соединяют в треугольник или звезду внутри корпуса двигателя. Схему обмотки ста-
7
тора нельзя изменить без разборки двигателя. При шести выводных
концах можно соединить обмотку статора по любой из схем перестановкой перемычек в коробке выводов.
В качестве основного размера современных серий асинхронных двигателей принята высота оси вращения машины, то есть расстояние от оси вращения до установочной поверхности (нижней
плоскости лап для основного исполнения IM1001). Увязка мощностей двигателей основного исполнения с установочными размерами
по ГОСТ 19523-81 приведена в табл. 2.2 и 2.3, машин с фазным ротором в табл. 2.4.
Для двигателей общего назначения предусмотрены два исполнения по степени защиты от воздействия окружающей среды: обдуваемое закрытое (IP44, IP54) и защищенное (IP23). Обозначение исполнения по степени защиты состоит из двух латинских букв IP
(начальные буквы английских слов International Protection) и двух
цифр (ГОСТ 17494-72, ГОСТ 14254-80). Первая цифра характеризует
степень защиты персонала от соприкосновения с токоведущими или
вращающимися частями, находящимися внутри машины, и степень
защиты машины от попадания в нее твердых посторонних тел; вторая – степень защиты от проникновения воды внутрь машины.
В обозначении исполнения по степени защиты IP44 первая
цифра 4 означает, что оболочка (корпус) защищает машину от попадания внутрь и касания с токоведущими и движущимися частями
твердых тел с диаметром более 1 мм. В обозначении IP54 (пылезащищенное исполнение) цифра 5 соответствует полной защите персонала от прикосновения к токоведущим и вращающимся частям
внутри машины и защите от проникновения пыли внутрь оболочки
в количестве, нарушающем работу машины. Вторая цифра 4 в обозначениях исполнений IP44, IP54 означает защиту от попадания
внутрь корпуса брызг воды любого направления.
В обозначении IP23 цифра 2 означает защиту от проникновения внутрь оболочки и прикосновения к токоведущим и вращающимся частям машины пальцев человека или твердых предметов с
длиной менее 80 мм и диаметром более 12 мм. Вторая цифра 3 соответствует защите машины от попадания внутрь капель воды, падающих на корпус под углом не более 60° к вертикали.
Способ охлаждения двигателя зависит от исполнения по степени защиты. Обозначение способа охлаждения состоит в самом
простом случае из латинских букв IC (начальные буквы слов International Cooling) и группы знаков из одной буквы и двух цифр.
8
Таблица 2.2
Увязка мощностей и высот оси вращения двигателей основного
исполнения серий 4А и АИР со степенью защиты IP44, IP54
Высота Услов- Длина
Номинальная мощность, кВт
оси вра- ная сердечщения, длина
ника 2р = 2 2р = 4 2р = 6 2р = 8 2р = 10 2р = 12
мм
станины статора
45
А
B
A
B
A
B
A
B
A
B
A
B
А
В
0,04
0,06
50
0,09
0,12
56
0,18
0,25
63
0,37
0,55
71
0,75
1,1
80
1,5
2,2
90
L
3,0
–
100
S
4,0
L
5,5
112
M
А
7,5
В
–
132
S
–
M
11
160
S
15
M
18,5
180
S
22
M
30
200
M
37
L
45
225
M
55
250
S
75
M
90
280
S
110
M
132
315
S
160
M
200
355
S
250
M
315
* Только для серии 4А.
0,025
0,04
0,06
0,09
0,12
0,18
0,25
0,37
0,55
0,75
1,1
1,5
2,2
–
3,0
4,0
5,5
–
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
160
200
250
315
–
–
–
–
–
–
0,18
0,25
0,37
0,55
0,75
1,1
1,5
–
–
2,2
3,0
4,0
5,5
7,5
11
15
–
18,5
22
30
37
45
55
75
90
110
132
160
200
–
–
–
–
–
–
–
–
–
0,25
0,37
0,55
0,75
1,1
–
1,5
2,2
3,0
4,0
5,5
7,5
11
–
15
18,5
22
30
37
45
55
75
90
110
132
160
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
22 (30*)
30 (–*)
37
45
55
75
90
110
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
45
55
75
90
9
Таблица 2.3
Увязка мощностей и высот оси вращения двигателей
серий 4А и АИР со степенью защиты IP23
Высота оси
вращения,
мм
160
Условная
Номинальная мощность, кВт
длина
станины 2р = 2 2р = 4 2р = 6 2р = 8 2р = 10 2р = 12
S
22*
M
30*
180
S
37*
M
45*
200
M
55
L
75
225
M
90
250
S
110
M
132
280
S
160
M
200
315
S
–
M
250
355
S
315
M
400
* Только для серии 4А.
18,5*
22*
30*
37*
45
55
75
90
110
132
160
200
250
315
400
–
–
18,5*
22*
30
37
45
55
75
90
110
132
160
200
250
–
–
15*
18,5*
22
30
37
45
55
75
90
110
132
160
200
–
–
–
–
–
–
–
–
–
45*
55*
75
90
110
132
–
–
–
–
–
–
–
–
–
–
–
55
75
90
110
Буква обозначает вид хладагента. Первая цифра условно характеризует устройство контура для циркуляции хладагента, вторая –
способ перемещения хладагента. Если у машины несколько контуров охлаждения, то после букв IC будет размещено соответствующее число групп знаков из одной буквы и двух цифр, характеризующих каждый контур охлаждения. Первой стоит группа знаков
для контура с хладоагентом, имеющим наиболее низкую температуру. Если машина охлаждается воздухом, буквенное обозначение
вида хладоагента (для воздуха буква А) не ставят.
Двигатели со степенью защиты IP44 обычно выполняют со
способом охлаждения IC0141. Первые две цифры описывают внешний контур охлаждения и определяют, что машина охлаждается окружающим воздухом (цифра 0), обдувающим под действием закрепленного на валу вентилятора внешнюю поверхность оболочки (цифра 1). Внутренний контур охлаждения машины характеризует следующая группа цифр (41), означающая, что тепло от сердечников и
обмоток передается оребренной снаружи оболочке (цифра 4) воздухом, перемещаемым внутри корпуса вентилирующим действием ротора или внутреннего вентилятора (цифра 1).
10
Таблица 2.4
Увязка номинальных мощностей и высот оси вращения
электродвигателей с фазным ротором серий 4А и АИР
Высота УсловНоминальная мощность, кВт
оси
ная
Степени защиты
Степень защиты IP23
вра- длина
IP44, IP54
щения, стамм
нины 2р = 4 2р = 6 2р = 8 2р = 4 2р = 6 2p = 8 2p = 10 2p = 12
100
112
132
S
L
M (А)
(В)
S
M
2,2
3,0
4,0
–
5,5
7,5
–
1,5
2,2
3,0
4,0
5,5
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
11
7,5
5,5
14*
–
–
–
–
15
11
7,5
17*
–
–
–
–
14*
10*
7,1*
–
–
–
–
–
180
S
–
–
–
22*
13*
11*
–
–
M
18,5
15
11
30* 18,5* 14*
–
–
200
M
22
18,5
15
37
22
18,5
–
–
L
30
22
18,5
45
30
22
–
–
225
M
37
30
22
55
37
30
–
–
250 S (А)
45
37
30
75
45
37
–
–
(В)
55
45
37
90
55
45
–
–
M
75
55
45
110
75
55
–
–
280
S
90
75
55
132
90
75
45*
–
M
110
90
75
160
110
90
55*
–
315
S
132
110
90
200
132
110
75*
55*
M
160
132
110
250
160
132
90*
75*
355
S
200
160
132
315
200
160 110* 90*
M
250
200
160
400
250
200 132* 110*
П р и м е ч а н и я: * Только для серии 4А.
1. С мощностями, приведенными в таблице левее и выше
жирной линии, выпускаются только двигатели серии АИР.
2. Двигатели серии 4А со степенью защиты IP44 выпускаются
с высотами оси вращения h < 280 мм.
Двигатели со степенью защиты IP23 выполняют со способом
охлаждения IC01. При этом способе охлаждения окружающий
воздух свободно входит через отверстия в оболочке, проходит
внутри
160
S
M
11
машины, охлаждая при этом сердечник с обмотками, и выходит наружу (цифра 0). Охлаждающий воздух перемещается закрепленным
на валу машины вентилятором (цифра 1).
Внешний вид, положение в пространстве и способ установки
двигателя определяет конструктивное исполнение по способу монтажа (ГОСТ 2479-79), в обозначение которого входят две латинские
буквы IM (начальные буквы английских слов International Mounting)
и четыре цифры. Первая цифра определяет группу конструктивного
исполнения машины, вторая и третья – способ монтажа и направление конца вала, четвертая – исполнение конца вала.
Для двигателей общего назначения основным является исполнение по способу монтажа IM1001: двигатель с двумя подшипниковыми щитами на лапах (IM1), для монтажа лапами вниз с горизонтальным направлением вала (цифры 00), с одним цилиндрическим
концом вала (последняя цифра 1). Выпускают также двигатели с
группами конструктивных исполнений: IM2 – на лапах с подшипниковыми щитами и с фланцем на подшипниковом щите; IM3 – без
лап с подшипниковыми щитами и с фланцем на одном подшипниковом щите. Другие исполнения по способу монтажа двигателей
групп IM1, IM2 и IM3 рассмотрены в /4/.
Двигатели основного исполнения серии предназначены для
эксплуатации в районах с умеренным климатом (климатическое исполнение У) и категориями размещения 2, 3 или 4 (ГОСТ 15150-69).
Эти двигатели следует устанавливать в закрытых помещениях с естественной вентиляцией: без искусственно регулируемых климатических условий (неотапливаемые помещения) для категории размещения 3 или с искусственно регулируемыми климатическими условиями (отапливаемые помещения) для категории размещения 4. Категория размещения 2 соответствует эксплуатации машины на открытом воздухе без прямого действия солнечной радиации и атмосферных осадков (под навесом).
Основные установочно-присоединительные размеры двигателей
базового исполнения (рис. 2.1) стандартизированы. Шкала установочных размеров для машин на лапах образована с учетом того,
что при каждой высоте оси вращения могут быть выполнены машины с разной длиной станины. Этим длинам станины присвоены
условные обозначения: S (Short) – короткая, M (Medium) – средняя,
L (Long) – длинная. Каждому значению высоты оси вращения h и
условному обозначению длины станины (S, M или L) соответствуют
определенные установочные размеры b10, l1, l10, l31, d10 (табл. 2.5).
12
Таблица 2.5
Установочные размеры (рис. 2.1) и примерная масса асинхронных
двигателей основного исполнения серий 4А и АИР
Высота УсловУстановочные размеры, мм
Примероси
ная
ная
l1
вра- длина
b10
l10
l31
d10
масса,
щения стакг
2p = 2 2p > 2
h, мм нины
56
–
90
71
36
5,8
23
23
4,5
63
–
100
80
40
7
30
30
6,3
71
–
112
90
45
7
40
40
11–18,6
80
–
125
100
50
10
50
50
14–20
90
L
140
125
56
10
50
50
18,6–28,7
100
S
160
112
63
12
60
60
23–36
L
160
140
63
12
60
60
29–42
112
M
190
140
70
12
80
80
41–56
132
S
216
140
89
12
80
80
58–77
M
216
178
89
12
80
80
71–93
160
S
254
178
108
15
110 110
100–135
M
254
210
108
15
110 110
120–160
180
S
279
203
121
15
110 110
160–175
M
279
241
121
15
110 110
180–255
200
M
318
267
133
19
110 140
260–270
L
318
305
133
19
110 140
280–315
225
M
356
311
149
19
110 140
355
250
S
406
311
168
24
140 140
445–490
M
406
349
168
24
140 140
495–535
280
S
457
368
190
24
140 170
715–785
M
457
419
190
24
140 170
825–835
315
S
508
406
216
28
140 170
860–900
M
508
457
216
28
140 170 940–1100
355
S
610
500
254
28
170 210 1200–1400
M
610
560
254
28
170 210 1350–1670
Примечания: 1. Меньшие значения массы соответствуют двухполюсным двигателям.
2. При h ≤ 132 мм меньшие значения массы соответствуют машинам со станинами из алюминиевого сплава.
3. При h ≥ 160 мм меньшие значения массы соответствуют машинам со степенью защиты IP23.
13
Дополнительно в табл. 2.5
приведены ориентировочные значения массы асинхронных двигателей основh
ного исполнения достаточно широко применяемых в
d10
настоящее время в России
l1 l31 l10
b10
асинхронных
двигателей
единых серий 4А и АИ.
Рис. 2.1. Основные установочные размеры
Серия 4А спроектидвигателей на лапах
рована в 1969–1971 годах,
в 80-х годах машины этой
серии выпускали в массовом количестве. Серия выполнена на 17
стандартных (ГОСТ 13267-73) высотах оси вращения от 50 до 355 мм
и охватывает диапазон номинальных мощностей от 0,06 до 400 кВт
(табл. 2.2–2.4). Для расширения шкалы мощностей на каждой из
высот оси вращения, за исключением высоты 225 мм, выпускали машины двух разных длин с различными мощностями. Ряд номинальных мощностей соответствует ГОСТ 12159-74. Двигатели основного
исполнения выпускали с исполнениями по степени защиты IP44,
IP23 и способами охлаждения IC0141, IC01 соответственно. Степень
защиты вводных устройств двигателей обоих исполнений не ниже
IP44. Основные группы конструктивных исполнений IM1, IM2, IM3.
Обозначение двигателя основного исполнения серии 4А состоит из десяти позиций:
4 А Х Х Х Х Х Х Х Х.
1 2 3 4 5 6 7 8 9 10
(2.1)
Позиции в порядке следования номеров означают:
1 – порядковый номер серии (четвертая);
2 – род двигателя (асинхронный);
3 – исполнение по степени защиты: буква Н – исполнение IP23,
отсутствие буквы – исполнение IP44;
4 – исполнение по материалу станины и щитов: буква А – станина и щиты алюминиевые, буква Х – станина алюминиевая, щиты
чугунные или наоборот, отсутствие буквы – станина и щиты чугунные или стальные;
5 – высота оси вращения (две или три цифры), мм;
6 – установочный размер по длине станины (условная длина
станины: буквы S – меньший, M – средний или L – больший);
14
7 – длина сердечника статора: буквы А – меньшая или В – большая при одинаковом установочном размере S, M или L; отсутствие
буквы означает, что при данном установочном размере делают двигатели только с одной длиной сердечника статора;
8 – число полюсов двигателя (одна или две цифры);
9 – климатическое исполнение (буква У);
10 – категория размещения (цифры 3 или 2).
Примеры условного обозначения основного исполнения трехфазных асинхронных двигателей серии 4А:
4АА71В6У3 – асинхронный двигатель четвертой серии с короткозамкнутым ротором, степень защиты IP44, щиты и станина алюминиевые, высота оси вращения 71 мм, сердечник статора большей
длины (В), шестиполюсный, для эксплуатации в условиях умеренного климата (У), в закрытых неотапливаемых помещениях (3);
4АН200М4У3 – асинхронный двигатель четвертой серии с короткозамкнутым ротором, степень защиты IP23, щиты и станина из
чугуна, высота оси вращения 200 мм, средняя длина станины (М),
четырехполюсный, для эксплуатации в условиях умеренного климата (У), в закрытых неотапливаемых помещениях (3).
Основное исполнение служит базой для разработки модификаций и специализированных исполнений.
Модификациями называют двигатели с тем же значением главного параметра (высота оси вращения), что и у двигателей основного исполнения, но отличающиеся рабочими свойствами. К модификациям относятся двигатели с повышенным пусковым моментом
(обозначают буквой Р), повышенным скольжением (С), фазным ротором (К), с встроенной температурной защитой (Б), встроенным
электромагнитным тормозом (Е), малошумные (Н), встраиваемые (В),
многоскоростные, однофазные. Характеризующие модификацию буквы занимают определенное место в обозначении двигателя (2.1):
буквы Р, С, К, В – после третьей позиции, характеризующей степень
защиты; буквы Б, Е, Н – после обозначения числа полюсов (после
восьмой позиции). Например, условное обозначение двигателя с фазным ротором имеет вид 4АНК200М4У3.
В серии 4А есть модификация на частоту сети 60 Гц, включающая основное исполнение и все названные выше модификации.
К специализированным исполнениям относят двигатели, удовлетворяющие повышенным требованиям потребителя к условиям работы. Различают специализированные исполнения по точности установочных и присоединительных размеров (высокоточные П2), по ус-
15
ловиям окружающей среды, узкоспециализированные.
Специализированные исполнения по условиям окружающей среды: тропическое (климатическое исполнение Т с категорией размещения 2 и 5, последнее для помещений с повышенной влажностью);
влагоморозостойкое (ХЛ2); для морских и речных судов (ОМ2); химостойкое (обозначают буквой Х с категориями размещения 3 и 5);
сельскохозяйственного назначения (С или СХ с категориями размещения от 1 до 5, категория размещения 1 соответствует эксплуатации
двигателя на открытом воздухе при прямом действии солнечной радиации и атмосферных осадков); пылезащищенное (П); рудничное
(РН для работы в климатических условиях У2 и У5); для моноблочных центробежных насосов (Ж при климатических условиях У3).
Буквы Т2, Т5, ХЛ2, ОМ2, характеризующие исполнения по климатическим условиям, занимают в условном обозначении (2.1) двигателя позиции 9 и 10, определяющие климатическое исполнение и
категорию размещения. Буквы П2, Х, СХ, П, РН, Ж, определяющие
технологические условия применения, пишут в обозначении двигателя после числа полюсов. Все перечисленные специализированные
исполнения, за исключением двигателей для насосов (Ж), высокоточных (П2) и общеклиматического морского исполнения ОМ, выпускают с исполнением по степени защиты IP54.
Двигатели узкоспециализированного исполнения: частотно-регулируемые для привода металлорежущих станков; для деревообрабатывающих станков; лифтовые.
Для повышения надежности и улучшения энергетических характеристик в середине 80-х годов был модернизирован ряд двигателей серии 4А с исполнением по степени защиты IP44. В условном
обозначении модернизированных двигателей после названия серии
стоит буква М – серия 4АМ, остальные позиции в обозначении двигателя те же, что и для серии 4А.
Серия АИ разработана в 80-х годах с участием стран-членов
СЭВ (Совет Экономической Взаимопомощи), входящих в организацию “Интерэлектро”, что отражено в названии серии АИ – Асинхронные Интерэлектро. Серия АИ охватывает диапазон номинальных мощностей двигателей от 0,025 до 400 кВт. Серия разработана на 18 стандартных высотах оси вращения от 45 до 355 мм
(табл. 2.2–2.4). Как и в серии 4А, двигатели одной высоты оси вращения выпускают с двумя длинами станины или с одной длиной
станины, но с двумя длинами сердечника статора. Ряд номинальных мощностей соответствует ГОСТ 12139-84.
16
В отличие от серии 4А в качестве основного исполнения двигателей серии АИ принято закрытое исполнение со степенью защиты IP54. Защищенное исполнение IP23 отнесено к модификациям.
Двигатели со степенью защиты IP54 выполняют в основном со
способом охлаждения IC0141. Для машин малой мощности предусмотрен способ охлаждения IC0041, отличающийся от предыдущего
отсутствием внешнего вентилятора. Тепло с поверхности станины
отводится свободной конвекцией. В диапазоне высот оси вращения
280–355 мм применяют способ охлаждения IC0151 с обменом тепла
между воздухом внутри и снаружи машины через теплообменник,
роль которого выполняет станина с полыми изнутри ребрами
(рис. 3.6). Группа цифр 51 обозначает, что во внутреннем контуре
охлаждения нагретый воздух прогоняется внутренним вентилятором
по полым ребрам станины и отдает тепло станине. Двигатели со
степенью защиты IP23 выполняют со способом охлаждения IC01.
Двигатели серии АИ выпускают с основными группами конструктивных исполнений IM1, IM2 и IM3.
В связи с тем, что вопросы международной стандартизации по
увязке мощностей и установочных размеров окончательно не решены, двигатели серии АИ выпускают в двух вариантах.
В первом варианте принята увязка номинальных мощностей и
высот оси вращения, согласованная странами СЭВ – членами “Интерэлектро”. Двигатели этого варианта имеют обозначение АИР и предназначены для внутренних поставок.
Второй вариант выполнен с увязкой номинальных мощностей
и высот оси вращения, принятой странами, входящими в Организацию по стандартизации электротехнических изделий стран Западной
Европы (CENELEC). Обозначение машин второго варианта начинается с букв АИС, двигатели выпускают для поставок на экспорт.
Размеры активных частей для большинства двигателей АИР и
АИС одинаковы при равных номинальных мощностях. Различие заключается в том, что двигатели АИР почти всех мощностей выпускают с меньшей на одну ступень высотой оси вращения, чем двигатели АИС. В двигателях АИС высоту оси вращения увеличивают
до требуемой стандартной за счет высоты лап. Поэтому в дальнейшем основное внимание уделено конструкции двигателей АИР.
В серии АИ различают три вида условных обозначений двигателей – базовое, основное и полное – со структурой обозначения,
подобной принятой для серии 4А.
В базовом обозначении указаны название серии, вариант увяз-
17
В базовом обозначении указаны название серии, вариант увязки мощности и высоты оси вращения, высота оси вращения, условная длина станины и сердечника статора, число полюсов. Основное
обозначение – это сочетание базового обозначения с указанием вида
защиты и охлаждения, модификации, специализированного исполнения и исполнения по условиям окружающей среды. Полное обозначение содержит данные основного обозначения и дополнительные
электрические и конструктивные характеристики машины: номинальное напряжение, исполнение по способу монтажа, исполнение вводного устройства и другие.
Основное обозначение двигателей базового исполнения:
АИ Х Х Х
1 2 3 4
Х Х Х .
5 6 7
(2.2)
Позиции в порядке следования номеров означают:
1 – название серии (АИ);
2 – вариант увязки мощности и высоты оси вращения (Р или С);
3 – исполнение по виду защиты и охлаждения: отсутствие буквы – исполнение IP54 (буква Н – модификация с исполнением IP23);
4 – высота оси вращения, мм;
5 – установочный размер по длине станины (буквы S, M или L)
и условная длина сердечника (буквы А, В или С);
6 – число полюсов двигателя (одна или две цифры);
7 – климатическое исполнение и категория размещения (У2–У4).
Пример условного обозначения основного исполнения трехфазного асинхронного двигателя серии АИ:
АИР160S6У3 – асинхронный двигатель с короткозамкнутым ротором серии АИ, вариант увязка Р, высота оси вращения 160мм,
короткая длина станины (S), шестиполюсный, для эксплуатации в
условиях умеренного климата (У), в закрытых неотапливаемых помещениях (3).
Дополнительно в серии АИ предусмотрены исполнения по виду защиты и охлаждения: закрытое с естественным охлаждением
(обозначают буквой Б, способ охлаждения IP0041); открытое (Л);
закрытое продуваемое (П); с пристроенным вентилятором, приводимым во вращение отдельным двигателем (Ф). Символы, характеризующие вид защиты и охлаждения, занимают в обозначении (2.2)
двигателя позицию 3.
В серии АИ предусмотрены практически такие же модификации первого порядка и специализированные исполнения, что и в
18
серии 4А. Обозначающие модификацию и (или) специализированное
исполнение символы и их положение в обозначении (2.2) двигателя
соответствуют принятым для серии 4А. Объединение в одном двигателе нескольких рабочих свойств и условий применения образует
модификации второго, третьего и более высоких порядков.
Результатом модернизации и совершенствования конструкции
двигателей серий АИ и 4А являются двигатели выпускаемых серий 5А, 6А и RA (Российская асинхронная).
3. КОНСТРУКЦИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Степень защиты от воздействия окружающей среды и способ
охлаждения определяют два основных вида асинхронных машин: закрытые обдуваемые двигатели (исполнения IP44, IP54) и защищенные (исполнение IP23).
В закрытых двигателях со степенями защиты IP44, IP54 более
90 % тепла, обусловленного потерями мощности, отводится охлаждающим воздухом с поверхности корпуса. Поэтому конструктивная
схема таких машин (рис. 3.1–3.7) одинакова и предусматривает:
– станину с наружными продольными ребрами, увеличивающими поверхность охлаждения;
– наружный обдув двигателя центробежным реверсивным дисковым вентилятором, закрытым кожухом.
При рассмотрении конструкции двигатели серий 4А и АИР
можно условно разделить на отрезки по высотам оси вращения:
45–63; 71–100; 112–132; 160–180; 200–250; 280–355 мм. В пределах
отрезка двигатели серии подобны по конструкции и выполнению
всех деталей. Двигатели отдельных отрезков одной серии выполнены с конструктивными различиями. Конструктивные особенности
машин одинаковых отрезков серий 4А и АИР рассмотрены ниже.
В средней части оребренной станины (рис. 3.1, 3.2) установлен
магнитопровод (сердечник) статора из изолированных листов электротехнической стали толщиной 0,5 мм с уложенной в пазы сердечника обмоткой из медного изолированного провода. У двигателей с
высотами оси вращения h = 112–250 мм сердечник в станине фиксируют от проворачивания при резких изменениях нагрузки на валу
стопорными винтами (рис. 3.3). Концы фаз обмотки статора выведены в установленное на внешней поверхности станины вводное
устройство (коробку выводов). Вводное устройство служит для подключения двигателя к сети.
19
8
9 10 12
7
11
5 6
14 15
16
13
4
3
1
2
17
19
18
20
6
Рис. 3.1. Асинхронный двигатель с короткозамкнутым
ротором 4АА80 (степень защиты IP44): 1 – вал; 2 – щит
подшипниковый; 3 – шайба
пружинная; 4 – подшипник;
21 5 – обмотка статора; 6 – шпилька крепления щитов; 7 – прилив щита; 8 – вводное устройство; 9 – станина; 10 – сердечник статора; 11 – сердечник
ротора; 12 – обмотка ротора;
13 – лопатка ротора вентиляционная; 14 – винт; 15 – кожух
вентилятора; 16 – вентилятор
из алюминиевого сплава;
17 – табличка с техническими
данными двигателя; 18 – лапа;
19 – болт заземления; 20 – оребрение станины; 21 – сварной
шов в канавке на внешней поверхности сердечника статора
20
3
5 6 7
4
A
8
9
10
2
11
1
12
15
14
13
A
Увеличено
16
10
4
8
9
Рис. 3.2. Асинхронный
двигатель с короткозамкнутым ротором АИР80
(степень защиты IP54):
1 – вал; 2 – щит подшипниковый; 3 – болт крепления
щита; 4 – прилив щита;
5 – вводное устройство;
o
6 – станина; 7 – прилив станины для крепления щита;
8 – винт крепления кожуха
вентилятора; 9 – кожух вентилятора; 10 – оребрение станины; 11 – табличка с техническими данными двигателя; 12 – вентилятор из пластмассы; 13 – отверстие для крепления; 14 – лапа; 15 – болт заземления; 16 – прокладка (шайба) резиновая
21
На валу закреплен сердечник ротора из листовой электротехнической стали толщиной 0,5 мм с обмоткой литой из алюминия у
двигателей с короткозамкнутым ротором (рис. 3.2–3.6) и из медного
изолированного провода у двигателей с фазным ротором (рис. 3.7).
Для перемещения внутреннего воздуха машины служат вентиляционные лопатки, отливаемые вместе с короткозамыкающими кольцами короткозамкнутых роторов или закрепленные на лобовых частях
обмоток фазных роторов.
С торцов машина закрыта торцевыми или подшипниковыми
щитами, в которых установлены подшипники качения, служащие
опорами для вала машины. Подшипниковые щиты крепят к станине
болтами, вворачиваемыми в приливы станины в виде ушек (рис. 3.2)
или утолщенных ребер (рис. 3.3–3.7). Допустимо для двигателей с
высотами оси вращения h ≤ 90 мм крепление подшипниковых щитов
шпильками (рис. 3.1).
Замки торцевых щитов, уплотнения вводных устройств и подшипниковых узлов практически исключают проникновение наружного охлаждающего воздуха внутрь машины и охлаждение им сердечников и обмоток. Вследствие этого тепло от активных частей к
охлаждаемому снаружи корпусу машины отводится двумя путями.
Вентиляционными лопатками вращающегося ротора внутренний
воздух перемещается в радиальном направлении от вала к станине
и обдувает лобовые части обмоток. При этом внутренний воздух
нагревается теплом более нагретых лобовых частей и охлаждает их.
Нагретый воздух отдает тепло свободным (не занятым сердечником
статора) внутренним поверхностям станины и подшипниковым щитам с более низкой температурой. Охлажденный воздух перемещается вдоль внутренней поверхности щитов к валу и снова попадает
на вентиляционные лопатки ротора.
Вследствие высокой средней температуры (80–130° С) внутренреннего воздуха отнимаемое им у лобовых частей обмоток количество тепла невелико. Поэтому часть тепла, передаваемая станине
внутренним воздухом, также невелика и в лучшем случае не превышает 25–30 % всего тепла, отводимого через оболочку машины.
Основная часть тепла от ротора машины передается через
зазор статору машины, где соединяется с теплом, выделяющимся в
обмотке и сердечнике статора. Далее тепло по листам стали сердечника статора передается к станине. Поэтому способ установки
сердечника статора должен обеспечивать хороший тепловой контакт
сердечника со станиной.
22
8
9 10 12
11 13 14
15
5
7
6
16
17
4 5
3
1
2
18
19
20
23
22 21
8
Рис. 3.3. Асинхронный
двигатель с короткозамкнутым ротором 4А160
(степень защиты IP44):
1 – вал; 2 – крышка подшипниковая наружная;
3 – подшипник; 4 – крышка
26
подшипниковая внутренняя; 5 – щит подшипниковый; 6 – обмотка ротора;
7 – обмотка статора;
25
8 – вводное устройство;
9 – рым-болт; 10 – сердечник статора; 11 – сердеч24
ник ротора; 12 – станина;
13 – лист статора крайний;
14 – лист статора изолиру23
ющий; 15 – болт крепления
щита; 16 – кожух вентилятора; 17 – вентилятор из алюминиевого сплава;онвентилятора;
18 – втулка; 1916
– кольцо
–
стопорное; 20 – шпонка; 21 – лопатка вентиляционная;
22 – груз
вентилятор
из балансироалюминиевого
сплава;
вочный; 23 – болт заземления; 24 – ребро; 25 – скоба;
26 – винт стопорный
17 – табличка с
техническими данными
двигателя; 18 – лапа; 19 –
болт заземления; 20 – оребрение станины; 21 –
23
Для улучшения охлаждения машины на внешней поверхности
станины отлиты ребра. Оребрение станины двигателей с высотами
оси вращения h ≤ 112 мм различно: у серии 4А (рис. 3.1) – радиальное; у серии АИР (рис. 3.2) – горизонтально-вертикальное. Внутреннее устройство двигателей серий 4А и АИР с высотами оси вращения h ≤ 112 мм практически одинаково.
На станине есть болт для заземления машины и табличка с
техническими данными двигателя. Двигатель крепят к фундаменту
с помощью отлитых вместе со станиной лап с отверстиями для
крепежных болтов.
Свободный выступающий конец вала (сторона механизма) служит для соединения с приводимым во вращение механизмом. На
противоположном конце вала установлен наружный вентилятор, закрытый кожухом. При вращении ротора вентилятор через отверстия
в торцевой части кожуха засасывает охлаждающий воздух и прогоняет его вдоль ребер станины. Воздух обдувает станину и отводит
тепло с ее поверхности.
В двигателях с высотами оси вращения h > 180 мм простое перемешивание внутреннего воздуха вентиляционными лопатками ротора недостаточно для удовлетворительного охлаждения лобовых
частей обмотки статора. Поэтому в машинах с h = 200–250 мм устанавливают на оребренных с внутренней стороны подшипниковых
щитках воздухонаправляющие щитки – диффузоры (рис. 3.4). Внутренний воздух под действием вентиляционных лопаток ротора продувается сквозь лобовые части обмотки статора, охлаждая их. Далее
воздух поступает в пространство между диффузором и подшипниковым щитом, отдавая последнему часть тепла, и охлажденный
вновь направляется вентиляционными лопатками ротора в зону лобовых частей обмоток.
Наиболее нагретой частью закрытых обдуваемых двигателей
(исполнение IP44, IP54) является ротор. Теплоотдача от ротора идет
в основном через статор и ухудшается с увеличением мощности и
соответственно внешнего диаметра машины. При этом также увеличивается нагрев обмотки статора. Чтобы не допустить перегрева
изоляции обмоток при рассмотренных выше схемах охлаждения,
необходимо уменьшать плотность тока в обмотках (линейную нагрузку) и соответственно мощность машины.
Для более интенсивного охлаждения и уменьшения влияния
нагрева ротора на нагрев статора в машинах с высотами оси вращения h = 280–355 мм применяют форсированное охлаждение ротора.
24
8
9 10 11 12
26 15
5
7
17
24
19
6
4
1
16
5
3
2
20
26
25
23
21
Рис. 3.4. Асинхронный двигатель с короткозамкнутым ротором АИР225
(степень защиты IP54): поз. 1–23 соответствуют обозначениям к рис. 3.3;
24 – ребро внутреннее подшипникового щита; 25 – диффузор (щиток воздухонаправляющий); 26 – прилив станины в виде утолщенного ребра для
крепления подшипниковых щитов
С этой целью в сердечнике ротора выполняют осевые охлаждающие каналы, по которым продувается воздух.
Подшипниковые щиты двигателей серии 4А (рис. 3.5) выполнены с окнами для доступа наружного воздуха к осевым каналам ротора. Со стороны свободного конца вала окна закрыты жалюзи 20.
Для защиты от доступа наружного воздуха внутрь машины на торцевых щитах установлены направляющие кольца (диффузоры) 3. На
валу ротора закреплены два диска 2 с круглыми отверстиями. В отверстиях дисков одной стороной закреплены трубки 6, вторая сторона трубок вставлена в осевые каналы сердечника ротора. Обращенные друг к другу поверхности вращающихся дисков и неподвижных направляющих колец снабжены лабиринтными уплотнениями (узел А на рис. 3.5).
На внутренней стороне вентилятора 15 наружного обдува выполнены малые вентиляционные лопатки. За счет них при вращении
ротора в пространстве между диском вентилятора и направляющим
кольцом образуется область разрежения.
25
5 6
9 10 11 12 13
7 8
A
14 15 16
4
3
14
2
1
19 18 17
20
21
A
Увеличено
2
3
Рис. 3.5. Асинхронный двигатель с короткозамкнутым ротором 4А315
(степень защиты IP44): 1 – вал; 2 – диск; 3 – кольцо направляющее; 4 – щит
подшипниковый; 5 – кольцо бандажное; 6 – трубка; 7 – шайба нажимная; 8 –
палец нажимной; 9 – сердечник статора; 10 – сердечник ротора; 11 – шпонка
кольцевая; 12 – кольцо упорное; 13 – обмотка статора; 14 – масленка; 15 –
вентилятор; 16 – кожух вентилятора; 17 – подшипник; 18 – шпонка; 19 –
буртик; 20 – жалюзи; 21 – вводное устройство
26
Охлаждающий наружный воздух входит через окна торцевого
щита со стороны свободного конца вала и протягивается по трубкам и аксиальным каналам ротора в область разрежения, охлаждая
при этом ротор машины. Далее нагретый воздух малыми лопатками
вентилятора 15 выбрасывается в камеру между кожухом вентилятора и подшипниковым щитом, где смешивается с воздухом, засасываемым основными (большими) лопатками вентилятора 15 через решетку кожуха, и направляется вдоль станины.
В двигателях серии АИР (рис. 3.6) внутренний воздух протягивается вентилятором 13 по аксиальным каналам ротора в правую
внутреннюю область машины на стороне вентилятора, охлаждая при
этом ротор. Нагретый воздух нагнетается вентилятором 13 в полые
изнутри ребра станины. При движении по полым ребрам внутренний воздух охлаждается вследствие передачи тепла через стенки
ребер наружному воздуху, продуваемому вдоль ребер вентилятором
наружного обдува 15. Станина из гофрированной листовой стали с
внутренними каналами в ребрах представляет собой охладитель типа “воздух – воздух” (способ охлаждения IC0151). Охлажденный воздух выходит во внутреннюю область машины на стороне свободного конца вала и снова поступает в аксиальные каналы ротора.
В закрытых асинхронных двигателях с фазным ротором (исполнения IP44, IP54) охлаждение активных частей машины ухудшается по сравнению с короткозамкнутыми двигателями. Изоляция обмотки ротора уменьшает теплоотдачу от лобовых частей катушек
внутреннему воздуху машины и от пазовых частей сердечнику ротора, повышая тем самым нагрев обмотки ротора. Количество тепла, передаваемое от ротора к статору через зазор, увеличивается.
При этом ухудшается охлаждение обмотки статора и повышается
ее нагрев. Наибольшая средняя температура обмоток ограничена
классом нагревостойкости применяемой изоляции. Чтобы избежать
перегрева и повреждения изоляции обмоток, приходится уменьшать
плотность тока в обмотках и электромагнитные нагрузки машины.
Поэтому во многих случаях при одинаковой высоте оси вращения
мощность асинхронных двигателей с фазным ротором меньше, чем
у машин с короткозамкнутым ротором (табл. 2.2; 2.4).
Конструкция двигателей с фазным ротором унифицирована с
машинами основного исполнения серии (с короткозамкнутым ротором): станину, подшипниковые щиты, сердечник статора, вентиляционный узел и вводное устройство выполняют такими же, как у
короткозамкнутых машин соответствующих типоразмеров.
27
5
6 7
8 9
4
3
10 11
13
12
4
3
14
15
2
1 2
16
Рис. 3.6. Асинхронный двигатель с короткозамкнутым
ротором АИР280 (степень
защиты IP54): 1 – вал; 2 – подшипник; 3 – масленка; 4 – щит
подшипниковый; 5 – вводное
устройство; 6 – обмотка ста17
тора; 7 – нажимная шайба;
8 – станина; 9 – сердечник статора; 10 – сердечник ротора;
11 – обмотка ротора; 12 – лопатка ротора вентиляционная;
13 – вентилятор внутренний; 14 – кожух вентилятора; 15 – вентилятор наружный из алюминиевого сплава; 16 – оребрение станины; 17 – лапа;
стрелкой
показана циркуляция воздуха внутри машины
28
Охлаждение двигателей с фазным ротором со степенями защиты IP44, IP54 (рис. 3.7) осуществляется вентилятором внешнего
обдува 11.
Контактные кольца и щеточный аппарат (токосъемное устройство) размещены внутри дополнительной секции станины, внутренний объем которой отделен от активных частей двигателя вращающейся перегородкой 15 с лабиринтными уплотнениями, предотвращающими попадание щеточной пыли на лобовые части обмоток.
Токосъемное устройство размещают обычно со стороны вентилятора в двигателях с высотами оси вращения h ≤ 180 мм; со стороны
свободного конца вала – в машинах с большими высотами оси вращения h > 180 мм (рис. 3.7). В последнем случае установочный раз мер l31 (рис. 2.1) увеличивают на 230–280 мм по сравнению с величиной, приведенной в табл. 2.5.
В защищенных двигателях (исполнение IP23) окружающий воздух свободно проходит внутрь корпуса и выходит наружу, охлаждая активные части машины (способ охлаждения IC01).
Вследствие значительной разницы температур холодного окружающего воздуха и нагретых обмоток машины основной отвод тепла при достаточно большой скорости движения воздушного потока
внутри машины осуществляется через лобовые части обмоток (в основном обмотки статора). Теплоотдача пазовых частей катушек обмоток нагретым сердечникам существенно меньше, поэтому температура пазовых частей обмоток значительно превышает температуру
лобовых частей.
Увеличение длины сердечника статора ухудшает общую теплоотдачу машины и увеличивает нагрев обмоток вследствие удлинения пазовой части катушек. Поэтому для лучшего охлаждения обмоток, защищенные двигатели выполняют с возможно меньшей
длиной сердечников.
Прямое охлаждение активных частей машины наружным воздухом позволяет увеличить мощность и уменьшить массу, габариты
и стоимость защищенных двигателей по сравнению с закрытыми
машинами одного типоразмера. Эти преимущества особенно заметны в машинах больших габаритов и уменьшаются с уменьшением
высоты оси вращения, в результате чего защищенные и закрытые
двигатели становятся близкими по массе, стоимости и габаритам. В
результате исследований установлено, что применение защищенных
двигателей с любым числом пар полюсов целесообразно при высотах
оси
вращения
h
≥
160–200
мм.
4
5
6
7
8
9
10
2
4
3
11
12
2
1
29
18
17
16
15 14
13
Рис. 3.7. Асинхронный двигатель с фазным ротором 4АК225 (АИРФ225) со степенью защиты IP44
(IP54): 1 – вал; 2 – щит подшипниковый; 3 – палец щеточный с щеткодержателями; 4 – станина; 5 – вводное
устройство; 6 – сердечник статора; 7 – сердечник ротора; 8 – обмотка статора; 9 – обмотка ротора; 10 – диффузор; 11 – вентилятор из алюминиевого сплава; 12 – кожух вентилятора; 13 – лапа; 14 – болт заземления;
15 – перегородка вращающаяся (диск) с лабиринтными уплотнениями; 16 – токоотвод от обмотки ротора к
контактным кольцам; 17 – кожух контактных колец; 18 – узел контактных колец
10 11 12 13 14
8 9
7
6
5
4
15
16
5
3
1
17
2
30
б)
22
20 19
18
21
Рис. 3.8. Асинхронный двигатель с короткозамкнутым ротором 4АН200 (степень защиты IP23):
1 – вал; 2 – крышка подшипниковая наружная; 3 – подшипник; 4 – крышка подшипниковая внутренняя;
5 – жалюзи для входа воздуха; 6 – диффузор (щиток, направляющий воздух); 7 – обмотка ротора; 8 – обмотка статора; 9 – вводное устройство; 10 – рым-болт; 11 – винт стопорный; 12 – сердечник статора; 13 – сердечник ротора; 14 – станина; 15 – болт крепления щита; 16 – щит подшипниковый; 17 – шайба пружинная;
18 – лапа; 19 – жалюзи на выходе воздуха; 20 – болт заземления; 21 – скоба; 22 – лопатка вентиляционная
7
8
9
10
11 12 13
14
6
5
4
1 2
16
6
15 5
16
17
3
18
6
31
19
17
22
21
20
Рис. 3.9. Асинхронный двигатель с короткозамкнутым ротором АИРН250 (степень защиты IP23):
1 – вал; 2 – крышка подшипниковая наружная; 3 – подшипник; 4 – крышка подшипниковая внутренняя;
5 – болт крепления щита; 6 – щит подшипниковый; 7 – табличка с техническими данными двигателя;
8 – рым-болт; 9 – вводное устройство; 10 – сердечник статора; 11 – сердечник ротора; 12 – обмотка статора;
13 – станина; 14 – обмотка ротора; 15 – диффузор (щиток, направляющий воздух); 16 – жалюзи для входа
воздуха; 17 – болт крепления подшипниковых крышек; 18 – шайба пружинная; 19 – шпонка; 20 – болт заземления; 21 – лапа; 22 – жалюзи на выходе воздуха
8
9 10 11 12
13 14
15
16 17 18
8
9
19
7
6
5
4
3
1
21
2
23
22
32
20
24 5
30
6
19
25
23
Рис. 3.10. Асинхронный
двигатель с короткозамкнутым ротором 4АН315
(степень защиты IP23):
33
1 – вал; 2 – крышка подшипниковая наружная (капсула
подшипника); 3 – шайба для
снятия отработанной смаз29 ки; 4 – подшипник; 5 – масленка; 6 – болт крепления
капсулы подшипника к щиту; 7 – щит подшипниковый;
8 – рама, установленная на
заточке щита; 9 – болт креп28 ления кожуха к раме; 10 – кожух; 11 – диффузор; 12 –
крышка подшипниковая внутренняя; 13 – кольцо бандажное; 14 – обмотка статора;
21
15 – сердечник статора; 16 –
26
сердечник ротора; 17 – палец
нажимной; 18 – шайба на27
жимная с заточкой для посадки сердечника в станину;
19 – жалюзи для входа воздуха; 20 – крюк для подъема двигателя (4 шт.); 21 – болт крепления подшипникового щита к станине; 22 – шпонка; 23 – вводное устройство; 24 – болт крепления внутренней подшипниковой крышки; 25 – планка, стягивающая сердечник; 26 – полустанина; 27 – болт заземления; 28 – стальная
пластина для крепления статора к полустанине; 29 – болт; 30 – жалюзи на выходе воздуха
34
С учетом особенностей охлаждения конструктивная схема короткозамкнутых асинхронных двигателей со степенью защиты IP23
(рис. 3.8–3.10) предусматривает:
– двустороннюю симметричную радиальную систему вентиляции, нагнетательными элементами которой служат вентиляционные
лопатки, отлитые заодно с короткозамыкающими кольцами обмотки
ротора;
– гладкую снаружи станину близкой к прямоугольной формы с
отверстиями для выхода нагретого охлаждающего воздуха;
– торцевые щиты с отверстиями для входа холодного охлаждающего воздуха.
Защищенные и закрытые двигатели обычно изготавливают на
одних заводах и для одинаковых типоразмеров обеих видов двигателей одной серии унифицируют листы стали статора и ротора, а
также отлитые вместе с обмоткой ротора вентиляторы. Поэтому устройство активных частей закрытых и защищенных двигателей одной серии практически одинаково.
В двигателях серии 4А с литыми станинами (рис. 3.8) охлаждающий воздух засасывается через закрытые жалюзи 5 торцевые
окна обеих подшипниковых щитов, направляется диффузорами 6 на
вентиляционные лопатки ротора 22, обдувает лобовые части обмоток и внешнюю поверхность сердечника статора и выбрасывается
наружу через закрытые жалюзи 19 окна в средней части станины.
Защищенные двигатели серии АИР с литыми станинами
(рис. 3.9) конструктивно подобны машинам серии 4А одного исполнения и отличаются устройством станин, торцевых щитов, защитных жалюзи, вводных устройств и способами соединения этих узлов. Схема радиальной вентиляции таких двигателей серии АИР
аналогична принятой для серии 4А.
Конструкция защищенных асинхронных двигателей серий 4А и
АИР с высотами оси вращения h = 280–355 мм и сварными станинами практически одинакова (рис. 3.10). Сердечник статора 15 с обмоткой крепится нижней половиной в массивной полустанине 26,
сваренной из толстых листов стали. Наружные кольцевые заточки
нажимных шайб 18 сердечника статора устанавливают на кольцевые выступы, образованные заточками внутренних стоек 2 полустастанины (рис. 4.4). Статор зафиксирован от смещения болтами 29,
соединяющими приваренные к сердечнику стальные пластины 28 с
осевыми ребрами полустанины. Сверху статор закрыт кожухом 10
из тонколистовой стали с вентиляционными отверстиями 30.
35
3
4 5 6
7 8
9
10
2
11
12
1
13
14
15
17
16
Рис. 3.11. Асинхронный двигатель с фазным ротором 4АНК200 (степень защиты IP23) с аксиальной вентиляцией: 1 – вал; 2 – щит подшипниковый с жалюзи на входе воздуха; 3 – вводное устройство; 4 – сердечник статора; 5 – сердечник ротора; 6 – обмотка статора; 7 – обмотка
ротора; 8 – вентилятор; 9 – отводы от обмотки ротора к контактным
кольцам; 10 – щит подшипниковый; 11 – палец щеточный с щеткодержателями; 12 – узел контактных колец; 13 – шина токопровода в центральном отверстии вала; 14 – кожух коробки контактных колец; 15 – жалюзи
на входе воздуха в коробку контактных колец; 16 – коробка; 17 – жалюзи на выходе воздуха из корпуса
Выполнение корпуса в виде полустанины, закрытой легким кожухом, позволило значительно уменьшить массу двигателей отрезка
серий 4А и АИР с высотами оси вращения h = 280–355 мм.
В машинах со сварными станинами охлаждающий воздух действием вентиляционных лопаток ротора втягивается внутрь корпуса
через торцевые окна обеих подшипниковых щитов 7 (рис. 3.10), обдувает лобовые части обмоток, проходит в камеры, образованные
сердечником статора 15 и кожухом 10, и выбрасывается наружу через отверстия 30 на боковых поверхностях кожуха.
Защищенные двигатели с фазным ротором (рис. 3.11–3.13) по
конструкции статора унифицированы с двигателями основного исполнения серии. Станину, один подшипниковый щит, сердечник статора и вводное устройство выполняют такими же, как у двигателей
с короткозамкнутым ротором одного типоразмера.
36
7
6
5
4
1 2
8
9
10
11 12 13
6
14 15 16
17
18 20
19
3
21
23 22
Рис. 3.12. Асинхронный двигатель с фазным ротором АИРНФ225
(степень защиты IP23) с радиальной системой вентиляции: поз. 1–14
соответствуют обозначениям к рис. 3.9; 15 – отводы от обмотки ротора к
контактным кольцам; 16 – центробежный вентилятор; 17 – жалюзи на
входе воздуха; 18 – коробка контактных колец; 19 – палец щеточный с
щеткодержателями; 20 – узел контактных колец; 21 – болт заземления;
22 – лапа; 23 – жалюзи на выходе воздуха из корпуса
Токосъемное устройство двигателей с фазным ротором со степенью защиты IP23 расположено снаружи станины на противоположной свободному концу вала стороне и защищено коробкой или
кожухом. Провода, соединяющие выводы обмотки ротора с контактными кольцами, проходят через центральное отверстие вала ротора.
При одинаковой высоте оси вращения мощность двигателей с
всыпными обмотками фазного ротора (номинальной мощностью Р2Н
до 50–60 кВт) меньше, чем у короткозамкнутых двигателей вследствие плохих условий охлаждения всыпных обмоток. Двигатели со
стержневой обмоткой фазного ротора (Р2Н более 50 кВт) могут быть
выполнены на такую же мощность, как и короткозамкнутые двигатели
одинакового
типоразмера
(табл.
2.3,
2.4).
8
7
9 10 11 12
13 14
15
16 17 18 20 8
9
19 21
22
6
5
4
37
3
1
2
23
24
Рис. 3.13. Асинхронный двигатель с фазным ротором 4АНК315 (степень защиты IP23) с радиальной системой вентиляции: поз. 1–19 соответствуют обозначениям рис. 3.10; 20 – обмотка ротора;
21 – коробка контактных колец; 22 – узел контактных колец; 23 – шпонка; 24 – вводное устройство
38
В двигателях с высотами оси вращения h ≤ 200 мм применяют
аксиальную систему вентиляции (рис. 3.11). При вращении ротора
внутренний центробежный вентилятор 8 засасывает охлаждающий
воздух со стороны свободного конца вала через окна в торцевом
щите 2. Холодный воздух обдувает лобовые части обмоток, проходит по осевым каналам и вдоль наружной поверхности сердечника
статора, охлаждая активные части машины. Нагретый воздух выходит через закрытые жалюзи 15 окна в нижней боковой части подшипникового щита на стороне контактных колец.
В двигателях с высотами оси вращения h = 225–355 мм применена, как и в машинах с короткозамкнутым ротором, двусторонняя
симметричная радиальная система вентиляции (рис. 3.12, 3.13). Нагнетательными элементами служат два внутренних центробежных
вентилятора, расположенные с двух сторон ротора (рис. 3.11), или
вентиляционные лопатки, припаянные к хомутикам лобовых частей
стержневой обмотки ротора (рис. 3.13).
Подробнее устройство отдельных частей и узлов асинхронных
двигателей рассмотрено в следующем разделе.
4. ЭЛЕМЕНТЫ КОНСТРУКЦИИ АСИНХРОННЫХ
ДВИГАТЕЛЕЙ
4.1. Станины
Станины двигателей с исполнением по степени защиты IP44,
IP54 выполняют в форме цилиндра с продольными ребрами на
внешней поверхности. Станины двигателей серии 4А с высотой оси
вращения h ≤ 100 мм и серии АИ с h ≤ 112 мм отливают из сплавов
алюминия с кремнием АЛ2 или магнием АЛ9 (ГОСТ 2685-75). Для
двигателей серии 4А с высотами оси вращения h = 112–355 мм и
серии АИ с h = 132–250 мм приняты станины из серого чугуна марок СЧ 12-28, СЧ 15-32 или СЧ 18-36 (ГОСТ 1412-70). В серии 4А
станины двигателей c h = 71–100 мм часто также отливают из чугуна. Из алюминиевых сплавов могут быть отлиты станины двигателей серии АИ с высотами оси вращения h ≤ 160–180 мм.
Станины (рис. 4.1) протачивают по внутреннему диаметру под
посадку отдельно собранного сердечника статора или набор сердечника из отдельных листов (обычно при h ≥ 280 мм). В последнем
случае в станине протачивают канавки 4 для кольцевых шпонок,
фиксирующих
сердечник
с
торцов.
39
Р
а)
3
Линия разъема литейной формы
2
СТ
DСТР
1
DСТ
4
LСТ
б)
СТ
3
2
1
DА
DСТР
LСТ
DСТ
Р
DА
Рис. 4.1. Осевое сечение стенки литой станины (степень защиты
IP44, IP54) при литье в песчаную форму (а) и металлический кокиль (б): 1 – посадочная часть; 2 – заходная часть; 3 – кольцевая заточка для
центрирования подшипникового щита; 4 – канавка для кольцевой шпонки
Для удобства запрессовки или сборки сердечника статора с
обеих сторон станины предусмотрена “заходная” часть 2, то есть
внутренняя поверхность станины проточена по большему на 1–3 мм
диаметру, чем посадочная часть 1.
На торцах станин выполняют кольцевые заточки 3 для посадки и центрирования подшипниковых щитов. Обычно у двигателей с
h ≤ 250 мм посадочная поверхность заточки внешняя, при больших
высотах оси вращения – внутренняя.
Средняя толщина стенки литой станины, мм, при литье в зем-ляные или
песчаные формы с осевым разъемом (рис. 4.1, а)
СТ (2 0,05h) ,
(4.1)
где h – высота оси вращения, мм.
При литье в металлические кокили у станин двигателей с
h ≤ 132 мм толщина стенки ΔСТ может быть уменьшена на 30–40 %.
В этом случае применяют формы с четырехсторонним радиальным
разъемом и толщина стенки станины в средней части на 2–3 мм
меньше, чем в торцевой части (рис. 4.1, б).
Внешний диаметр станины, мм,
DСТ DА 2 СТ ,
(4.2)
где DА – внешний диаметр сердечника, мм; ΔСТ – толщина стенки, мм.
40
Длина станины для большинства двигателей приближенно, мм,
LСТ l1 2 lВЫЛ1,
(4.3)
здесь l1 – длина сердечника статора, мм; lВЫЛ1 – вылет (осевая длина)
лобовых частей обмотки статора, мм; lВЫЛ1 определяется в главе 9.
Длина станины может быть больше определенной по формуле (4.3) вследствие необходимости размещения внутри корпуса диффузоров, обмоткодержателей, контактных колец в машинах с фазным ротором или по технологическим причинам. В машинах малой
и средней мощности (в основном с h ≤ 132 мм) реальная длина станины может быть меньше найденной по формуле (4.3) за счет того,
что лобовые части обмотки статора частично размещены во внутреннем пространстве подшипниковых щитов (рис. 3.1).
Таблица 4.1
Минимальное расстояние от лобовой части до торцевого щита
h, мм 45–63 71–80 90 100 112 132 160 180 200 225 250 и более
lЛЩ, мм 6
8 10 12 15 20 25 30 35 40
50
В любом случае при окончательном определении длины станины следует иметь в виду, что расстояние lЛЩ от лобовой части обмотки статора до внутренней поверхности подшипникового щита
или диффузора по условиям достаточной изоляции и технологическим соображениям должно быть не меньше, указанного в табл. 4.1.
Для двигателей серии АИР с h = 132–250 мм и всех двигателей
серии 4А приняты мало различающиеся по конструкции станины
из чугуна с радиальным оребрением (рис. 3.1, 3.3–3.5). Станины отливают с площадкой для установки вводного устройства и лапами.
В лапах выполнены отверстия для крепежных болтов.
Толщина опорной части ΔО (рис. 3.2) лап литых станин, мм,
О (0,08 0,13) h ,
( 4.4 )
где h – высота оси вращения, мм.
Станины двигателей серии АИР с h = 45–112 мм выполняют с
горизонтально-вертикальным (продольно-поперечным) оребрением с
прилитыми лапами и корпусом вводного устройства (рис. 3.2). Для
станин машин серии АИР с h = 132–180 мм из алюминиевых сплавов также применено горизонтально-вертикальное оребрение. По мере совершенствования технологии литья предполагается изготовле-
41
ние и чугунных станин с горизонтально-вертикальным оребрением
для двигателей АИР с высотами оси вращения h ≤ 250 мм, что позволит на 10–20 % снизить массу станины по сравнению с радиальным оребрением при одной и той же поверхности охлаждения.
Станины двигателей АИС отливают без лап. Лапы отливают
отдельно и приворачивают к станине.
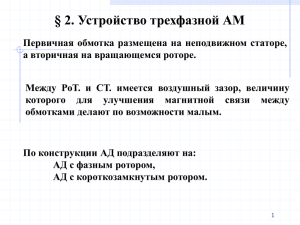
Ребра станины в поперечном сечении имеют форму трапеции
с закругленной по радиусу rP вершиной (рис. 4.2). Торцы ребер скошены под углом αР ≈ 15–45° к
γ
t
Р
Р
вертикали (рис. 4.1). Иногда
bРВ
rР bРВ
rР
ребра станин из алюминиевых
сплавов отливают с прямым
h
Р
βР
βР
обрезом (см. рис. 3.1).
hР
Основные размеры оребрения станин – средний шаг tP
bРО
и средняя высота ребра hP –
tР
bРО
приведены в табл. 4.2, 4.3.
а)
б)
При радиальном оребреРис. 4.2. Сечения ребер станины
нии средняя высота ребра, мм,
hP ≈ 0,1DA , где DA – наружный
с горизонтально-вертикальным (а)
диаметр статора, мм.
Таблица 4.2
и радиальным (б) оребрением
Параметры горизонтально-вертикального оребрения станин
двигателей серии АИ (размеры по рис. 4.2, а)
h, мм
tP, мм
hP, мм
rP, мм
K
45
10
11
56
63
12
12
1,0
14
71
9,2
17,5
80
9,5
19
90
9,7
20
100
9,8
23
1,25
112
14,8
19
132
16,5
21,5
0,79 – 0,8
Таблица 4.3
Параметры радиального оребрения станин из чугуна
двигателей серии 4А (размеры по рис. 4.2, б)
h, мм 71 80 90 100 112 132 160 180 200 225 250 280 315 355
tP, мм 11,3 12,7 14,4 16,1 14,5 15,8 20,2 23,6 24,4 27,2 32,5 42,2 52,5 63
hP, мм 14 14 16,5 20 21 24 27 30 30 34,5 40 45 50 60
rP, мм
1,5
2,5
3,0 – 4,5
K
0,58 – 0,6
0,7 – 0,71
Для алюминиевых станин rP ≈ 1,25; K ≈ 0,73.
42
Угол между стенками ребра βP = 3° при высотах оси вращения
h ≤ 71 мм; при больших высотах оси вращения βP = 4°.
Количество ребер на поверхности литой станины приближенно
NР K
DСТ
tР
.
(4.5)
Здесь K – коэффициент, определяющий занятую ребрами часть поверхности станины (табл. 4.2, 4.3); внешний диаметр станины DСТ и
шаг оребрения tP даны в миллиметрах.
Шаг оребрения tP можно приближенно выбрать по табл. 4.2, 4.3
или для радиального оребрения определить по формуле
DСТ
Р,
(4.6)
360
Здесь γР – угол между осями ребер в градусах (рис. 4.2); для двигателей с h = 71–132 мм γР ≈ 10°; с h = 160–355 мм γР ≈ 7,5°.
Ширина верхней части и основания ребра (рис. 4.2), мм,
tР
bРВ 2rP ;
bРО bРВ k hР .
(4.7)
(4.8)
Здесь k ≈ 0,0524 при βP = 3° и k ≈ 0,07 при βP = 4°; все размеры даны в миллиметрах.
Наибольший размер станины, мм, по вершинам ребер (рис. 4.1)
DСТР DСТ 2hP ,
(4.9)
где размеры DСТ и hP даны в миллиметрах.
Для крепления подшипниковых щитов на торцах станин отливают приливы или ушки, в которых сверлят отверстия и нарезают
резьбу для крепежных болтов (рис. 3.2). Приливы чугунных станин
выполняют в виде утолщенных продольных ребер (рис. 3.3–3.5).
В закрытых обдуваемых двигателях серии АИ с высотами оси
вращения 280–355 мм применены станины из гофрированной рулонной стали толщиной 2–2,5 мм (рис. 3.6). На специальной автоматической линии в стальной заготовке выдавливают ребра или гофры, после чего отрезают стальную гофрированную полосу необходимой длины, образующую заготовку оболочки станины (обечайку).
Гофрированную обечайку приваривают непосредственно к сердечнику статора. С торцов гофрированной оболочки приваривают два
43
стальных кольца с резьбовыми отверстиями для крепления подшипниковых щитов. Масса гофрированной станины в 2,5–3 раза меньше
массы литой станины.
Число и размеры ребер гофрированной станины можно приближенно определить по формулам (4.5), (4.6), приняв K ≈ 0,85–0,9;
γP ≈ 7–7,5° и hP ≈ 0,1DA . Стенки ребер практически параллельны.
Средняя ширина ребра, мм, приближенно
bP (0,35–0,5) t P ,
где tP – шаг оребрения, мм; радиус закругления ребра rP = 0,5bP.
Для защищенных двигателей серии АИ (степень защиты IP23)
приняты литые из чугуна станины четырехгранной формы с дугообразно закругленными гранями (рис. 4.3). На внутренней поверхности станины отлиты четыре (обычно при h ≤ 250 мм) или чаще
шесть продольных ребер 2
1
5
шириной bP ≈ (0,15–0,18)h
для установки сердечника
3
статора. Эти ребра несут
4
основную часть нагрузки,
Центр
создаваемой сердечником
2
станины
статора. Поэтому толщину
стенки 1 станины можно
принять на 10–25 % меньше, определяемой по форbP
муле (4.1).
Ребра
расположены
так, что центр сердечника
смещен вниз относительно
6
центра станины. Поэтому
Рис. 4.3. Сечение станины двигателя
поперечное сечение вентисерии АИ со степенью защиты IP23:
ляционных каналов в верх1 – стенка; 2 – продольное ребро; 3 – жаней части станины больше,
люзи; 4 – заточка для центрирования
чем в нижней. Ребра отподшипникового щита; 5 – отверстия с
литы с разрывом длиной
резьбой для крепления щита; 6 – крепежные отверстия в лапах
50–80 мм посередине для
устранения “воздушных
мешков”, которые возникают в области ребер и ухудшают теплоотдачу с наружной поверхности сердечника статора. Поверхность ребер протачивают под посадку сердечника, на поверхности ребер
выбирают круговые прямоугольные канавки для фиксации сердечника поперечными шпонками.
44
Площадка для установки вводного устройства размещена на
верху станины чаще всего со стороны выходного конца вала.
На боковых поверхностях станины расположены жалюзи для
выхода воздуха, отливаемые вместе со станиной. Допускается отдельное изготовление жалюзи из алюминиевого сплава или пластмассы с последующим креплением к станине болтами или винтами.
На торцах станины выполнены заточки 4 для посадки и центрирования подшипниковых щитов, а также резьбовые отверстия 5
для крепления щитов.
Станины двигателей серии 4А со степенью защиты IP23 с высотой оси вращения h ≤ 250 мм выполнены аналогично (рис. 3.8).
Отличие заключается в том, что продольные ребра сплошные, жалюзи на боковых поверхностях станины съемные.
Минимально допустимое расстояние, мм, от нижней точки литой станины до опорной плоскости лап (рис. 5.1)
h 2 3 0,017 h ,
(4.10)
где h – высота оси вращения, мм.
В двигателях со степенью защиты IP44, IP54 при достаточно
большом размере h2 в нижней части между лапами размещают охлаждающие ребра такой высоты, чтобы расстояние от верхушки ребер до опорной плоскости лап не превышало 0,5h2 .
Для двигателей серии АИ со степенью защиты IP23 с высотой
оси вращения 280–355 мм предусмотрены также сварные корпуса,
принятые ранее в серии 4А для тех же высот оси вращения. Корпус выполнен в виде полустанины цилиндрической формы, сваренной из толстолистовой стали Ст.3 (рис. 4.4).
1
7
10
8
6
2
1
5
3
2
1
3
4
7
9
4
2
5
3
Рис. 4.4. Сварная полустанина двигателя с высотой оси вращения
280–355 мм (степень защиты IP23): 1, 2 – стойки; 3 – полуцилиндрические обшивки; 4, 5 – кольцевые заточки; 6 – осевые ребра; 7– лапы;
8, 9 – отверстия с резьбой для крепления кожуха и торцевого щита;
10 – крепежные отверстия в лапах
45
Полустанина состоит из четырех вертикальных стоек 1, 2 толщиной 20–24 мм, скрепленных тремя полуцилиндрическими обшивками 3 толщиной 8–10 мм. Стойки выполнены с кольцевыми заточками. На заточках 4 торцевых стоек 1 центрируют подшипниковые
щиты, на заточках 5 внутренних стоек 2 – сердечник статора.
В верхней части стойки связаны двумя осевыми ребрами 6
толщиной 24–30 мм для крепления сердечника статора. На выступающих концах ребер 6 выполнены крюки для подъема двигателя. В
нижней части стойки соединены двумя образующими лапы 7 планками толщиной 25 или 30 мм. Минимальное расстояние от нижней
точки станины до опорной плоскости лап (рис. 5.1) h2 = 3–5 мм.
Верхнюю часть двигателя закрывают легким сварным кожухом 10 (рис. 3.10), изготовленным из тонколистовой стали Ст.3 или
Ст.5. На боковых сторонах кожуха выштампованы жалюзи 30 для
выхода охлаждающего воздуха. Кожух опирается на две рамы 8,
установленные на кольцевые заточки торцевых щитов 7 и прикрепленные болтами к верхней части щитов (рис. 3.10). Кожух 10 крепится болтами к рамам 8 и осевым ребd3
d1
рам 6 полустанины.
При массе двигателя 30 кг и более
на станине предусмотрено устройство для
подъема. В верхней части литых станин
h1
(рис. 3.3–3.5) выполнены отверстия с резьh2
d2
бой, в которые вворачивают подъемный
l1 l
рым-болт. Размеры рым-болта можно выd4
d
брать по табл. 4.4, исходя из примерной
массы двигателя, приведенной в табл. 2.5.
Рис. 4.5. Рым-болт
Таблица 4.4
Размеры и грузоподъемность рым-болтов
Резьба
рымболта d
М8
М10
М12
М16
М20
М24
М30
Размеры по рис. 4.5, мм
d1
d2
d3
d4
h1
h2
l
l1
36
45
54
63
72
90
108
20
25
30
35
40
50
60
8
10
12
14
16
20
24
20
25
30
36
40
50
63
12
16
18
20
24
29
37
6
8
10
12
14
16
18
18
21
25
32
38
45
55
12
15
19
25
29
35
44
Грузоподъемность, Н
1200
2000
3000
5500
8500
12500
20000
46
В двигателях большой мощности устанавливают два рым-болта
(рис. 3.9), на каждый приходится половина массы двигателя.
У станин с прилитым вводным устройством (рис. 3.2) вместо
рым-болта могут быть выполнены два соосных круглых отверстия в
продолжении стенок коробки выводов, параллельных оси машины.
При сварной конструкции станины для подъема двигателя предусмотрены торцевые крюки 20 (рис. 3.10).
На станине крепят табличку из нержавеющего материала (алюминий или медь) с основными техническими данными двигателя.
4.2. Магнитопроводы
Вследствие относительно небольшой длины сердечники статора
и ротора большинства двигателей выполняют в виде сплошных пакетов стали без радиальных вентиляционных каналов.
Сердечники набирают из штампованных листов рулонной холоднокатаной электротехнической стали (ГОСТ 21427.2-83) толщиной 0,5 мм. Для двигателей серии АИ с h = 45–63 мм применяют
сталь марки 2013; с h = 71–160 мм – марки 2214; с h = 160–250 мм –
марки 2212; с h = 280–355 мм – марок 2312 и 2412. В серии 4А сталь
марки 2013 применена для магнитопроводов машин с h = 50–132 мм;
для других высот оси вращения использованы те же марки стали,
что и в серии АИ.
Сталь марки 2013 поставляют в неотожженном состоянии. После штамповки листы стали сердечников подвергают рекристаллизационному отжигу для восстановления магнитных свойств и оксидации для образования изоляционного слоя толщиной до 0,05 мм с
сопротивлением не менее 1 Ом·см2. Для сталей других марок, поставляемых в отожженном состоянии и с изоляционным покрытием,
отжиг после штамповки не требуется.
Листы стали сердечника статора для двигателей с h < 280 мм,
а также 10- и 12-полюсных машин при h = 280–355 мм штампуют с
трапецеидальными полузакрытыми пазами (рис. 6.4). В листах стали
статора машин с h = 280–355 мм и числом полюсов 2p < 10 штампуют полуоткрытые пазы прямоугольной формы (рис. 6.5). В машинах
со степенью защиты IP23 такие же пазы применяют и при 2р ≥ 10.
В большинстве случаев сердечник собирают вне станины, что
упрощает последующую укладку и пропитку обмотки.
Листы стали статора набирают на сборочной оправке с базированием по внутреннему диаметру и шлицам пазов до требуемой
47
длины сердечника, спрессовывают давлением около 1,5 МПа и скрепляют по наружной поверхности. Для предотвращения распушения
зубцов с торцов статора кладут крайние листы 13 (рис. 3.3), соединенные попарно точечной сваркой.
При сборке выштампованные на внешней окружности листов
высечки прямоугольной или трапецеидальной формы образуют на
внешней поверхности сердечника продольные канавки, служащие
для стяжки сердечника.
Сердечники статоров с h ≤ 132 мм скрепляют несколькими продольными швами сварки 21 в канавках на наружной поверхности
(рис. 3.1). В машинах с h = 160–250 мм спрессованный сердечник
скрепляют выполненными в виде желобков стальными скобами
(рис. 3.3). Скобы укладывают в имеющие форму ласточкиного хвоста канавки на внешней поверхности сердечника. Затем желобки
скоб расправляют специальным приспособлением, а концы скоб загибают к торцевым поверхностям сердечника. Скобы приваривают
к внешней поверхности сердечника в нескольких точках. Сердечники статоров машин с высотами оси вращения 160 и 180 мм иногда
скрепляют сварными швами (серия 4А), двигателей с h = 200–250 мм
только скобами.
Сердечники статоров машин с h ≥ 280 мм набирают из листов
стали, лакированных после штамповки и снятия заусенцев. Листы
набирают на центрирующую оправку, спрессовывают и скрепляют
планками 25 (рис. 3.10) из полосовой стали. Планки размещают в
прямоугольных канавках на внешней поверхности сердечника и приваривают к нажимным шайбам 18 и частично к спинке сердечника
(рис. 3.10). Усилие запрессовки от нажимных шайб к листам стали
сердечника передается нажимными пальцами 17, которые размещены
радиально на осях всех зубцов статора. В качестве нажимных пальцев используют стальные пластины толщиной 10 мм, установленные
на ребро и приваренные к крайнему листу сердечника статора.
Сердечники статоров, устанавливаемые в литые станины протачивают по наружному диаметру, снимая припуск на штамповку.
Обработка наружной поверхности улучшает тепловой контакт сердечника со станиной и охлаждение закрытых двигателей со степенью защиты IP44, IP54. После укладки и пропитки обмотки сердечник статора запрессовывают в посадочную часть предварительно
нагретой станины и крепят стопорными винтами 26 (рис. 3.3).
Сердечники статоров двигателей серии АИ со степенью защиты IP54 при h ≥ 280 мм приваривают непосредственно к гофрированной обшивке станины (рис. 3.6).
48
У двигателей серии 4А со степенью защиты IP44 c h ≥ 280 мм
(рис. 3.5) сердечники статоров набраны из отдельных листов стали
непосредственно в станине, спрессованы и закреплены кольцевыми
шпонками 11.
В машинах защищенного исполнения (IP23) со сварными станинами к сердечнику статора, набранному на оправке и скрепленному планками, приваривают стальные пластины 28 (рис. 3.10) толщиной 24–30 мм. Этими пластинами сердечник опирается на осевые
ребра полустанины и крепится к ребрам болтами 29.
После установки сердечника в станину выполняют хонингование (обработку мелкозернистыми абразивными брусками, смонтированными на вращающейся головке) внутренней поверхности сердечника статора.
Листы сердечника ротора штампуют из высечки листов статора одновременно со штамповкой листов статора. При штамповке в
листах стали ротора вырубают пазы, отверстие для вала и (обычно
для машин с h ≥ 280 мм) круглые отверстия, образующие осевые
вентиляционные каналы.
У двигателей небольшой мощности с h < 160 мм листы стали
короткозамкнутых роторов, предназначенных для заливки алюминием, штампуют с полузакрытыми грушевидными (трапецеидальными)
пазами (рис. 7.5, а) с достаточно малым рассеянием. Недостатком
таких пазов является то, что при заливке и механической обработке алюминий из шлицев заволакивает поверхность ротора, образуя
хорошо проводящий слой. Вследствие этого увеличиваются добавочные потери мощности в роторе и нагрев машины.
Чтобы избежать этого явления в машинах с h ≥ 160 мм применяют закрытые пазы. Листы роторов двигателей с числом полюсов
2р > 2 при h = 160–250 мм штампуют с грушевидными (трапецеидальными) пазами, закрытыми насыщающимся мостиком (рис. 7.5, б).
Для двухполюсных машин при h = 160–225 мм применены закрытые трапецеидальные пазы (рис. 7.5, в).
Для повышения пускового момента у двигателей с высотой
оси вращения h = 280–355 мм и числом полюсов 2р > 2 трапецеидальные закрытые пазы ротора выполняют более узкими в обращенной к зазору верхней части (рис. 7.6).
Для двухполюсных двигателей с h = 250–355 мм листы ротора
штампуют с бутылочными закрытыми пазами (рис. 7.7).
Листы стали короткозамкнутого ротора набирают на оправку
49
по шихтовочному знаку. Для уменьшения магнитного шума и моментов от высших гармонических магнитного поля при наборе на
оправку выполняют скос пазов на одно зубцовое деление статора.
Обычно скос пазов ротора применяют во всех машинах с относительно малым зазором при h ≤ 160 мм. Скос пазов не делают при
h = 160 мм в двухполюсных двигателях с достаточно большим зазором. Набранный сердечник спрессовывают до требуемой длины и
без снятия давления закрепляют на оправке.
Сердечник ротора (за исключением роторов из стали 2013) нагревают до температуры 400–500 °С для образования оксидного
слоя в пазах и между листами стали и в нагретом состоянии заливают алюминием, образующим короткозамкнутую обмотку ротора.
Залитый алюминием сердечник ротора нагревают до температуры 500–550 °С и напрессовывают на гладкий вал для двигателей
с h ≤ 250 мм либо на вал со шпонкой для машин с h > 250 мм. В
последнем случае положение сердечника на валу фиксируется с одной стороны буртиком (заплечиком) 19 на валу, с другой стороны – кольцевой шпонкой или упорным кольцом 12 (рис. 3.5).
Нагрев ротора до 500–550 °С преследует цель одновременно с
насадкой ротора на вал вызвать отрыв стержней клетки ротора от
листов стали сердечника за счет разницы температурных коэффициентов объемного расширения материалов клетки и сердечника. В
результате увеличивается переходное сопротивление между клеткой
и сердечником и уменьшаются добавочные потери мощности.
После установки сердечника на валу ротор быстро охлаждают.
Для фазных роторов штампуют листы стали с трапецеидальными полузакрытыми пазами (рис. 7.1) при h ≤ 200 мм и с прямоугольными полузакрытыми пазами (рис. 7.2) при h > 200 мм. Листы
стали очищают от заусенцев и лакируют.
Сердечник фазного ротора набирают непосредственно на вал
со шпонкой (рис. 3.12, 3.13). Для фиксации сердечника вал выполнен с упорным заплечиком с одной стороны и канавкой для кольцевой шпонки или упорного кольца – с другой. Листы стали сжаты
с двух сторон нажимными шайбами 14 (рис. 4.20). После опрессовки сердечник ротора закрепляют на валу кольцевой шпонкой. Возможна фиксация сердечника на валу двумя кольцевыми шпонками
(рис. 3.11).
После сборки сердечника с валом (и укладки обмотки в пазы
фазного ротора) поверхность сердечника ротора протачивают или
шлифуют до получения необходимого наружного диаметра.
50
4.3. Обмотки статоров
4.3.1. Устройство и изоляция обмоток статора
Статорные обмотки асинхронных двигателей общего назначения
выполняют распределенными, то есть состоящими из большого числа катушек, укладываемых в пазы на внутренней поверхности сердечника статора. Устройство и способ изолирования обмотки зависит от номинальных мощности и напряжения, условий эксплуатации
машины и достигнутого уровня технологии электромашиностроения.
Для статорных обмоток большинства двигателей с номинальным напряжением до 1000 В принята система изоляции класса нагревостойкости F с предельно допустимой рабочей температурой
155 °С. Такая изоляция обеспечивает высокую степень использования активных частей машины и применена для всей серии АИР и
двигателей серии 4А с высотой оси вращения более 132 мм. В машинах серии 4А с высотой оси вращения менее 160 мм принята
система изоляции более низкого класса нагревостойкости В с предельно допустимой рабочей температурой 130 °С. Возможно применение изоляции класса нагревостойкости В и для машин серии АИ
с высотами оси вращения 45–63 мм.
Использование изоляции класса нагревостойкости Н повышает
использование машины на 14 %. При этом активные части машины
нагреты до 165–175 °С и температура станины достигает небезопасных для прикосновения значений, вследствие чего возникает необходимость разработки специальных оболочек усложненной конструкции. Повышенный нагрев подшипников требует применения более дорогих видов смазки. Поэтому в настоящее время использование такой изоляция для машин общего назначения неперспективно.
Возможность применения изоляции класса Н для специальных двигателей следует рассматривать в каждом конкретном случае.
При мощности двигателя до 100 кВт предпочтение отдают
всыпным обмоткам из мягких катушек, намотанных изолированным
медным проводом круглого сечения с наружным диаметром менее
1,8 мм. Основное достоинство таких обмоток – высокая технологичность и возможность механизации всего процесса изготовления. Лобовые части мягких катушек можно выполнять с малым вылетом и
соответственно уменьшить длину машины, потери мощности в обмотке и повысить КПД двигателя. Применение для всыпных обмоток трапецеидальных полузакрытых пазов с малым шлицем улучшает использование зубцовой зоны машины, уменьшает намагничи-
51
вающий ток и добавочные потери от пульсаций магнитного потока
в зазоре.
Для всыпных обмоток используют медный провод класса нагревостойкости В марок ПЭТВ, ПЭТВМ с эмалевой изоляцией на
полиэфирной основе и класса нагревостойкости F марок ПЭТ-155
(ГОСТ 21428-75) с эмалевой изоляцией на полиэфиримидной основе,
ПЭТМ с полиэфирамидимидной изоляцией (табл. 4.5). Провода марок ПЭТВ, ПЭТ-155 применяют при ручной укладке катушек в пазы. Для механизированной укладки обмоток на статорообмоточных
станках предназначены провода марок ПЭТВМ, ПЭТМ (ПЭТМ-155)
с изоляцией повышенной механической прочности.
Таблица 4.5
Размеры и сечения обмоточного медного эмалированного провода
круглого сечения марок ПЭТВ (ПЭТВМ) и ПЭТ-155 (ПЭТМ)
Диаметр
d,
мм
Сечение
неизолированного
провода, мм 2
Средний
диаметр
изолированного
провода
dИЗ , мм
Диаметр
d,
мм
Сечение Средний
Сечение Средний
Дианеизо- диаметр
неизо- диаметр
лиро- изолиро- метр лиро- изолированного ванного
d, ванного ванного
прово- провода мм прово- провода
да, мм 2 dИЗ , мм
да, мм 2 dИЗ , мм
0,20
0,0314 0,23
0,475* 0,1772 0,515 1,12 0,985
1,20
0,21* 0,0353 0,242 0,50 0,1963 0,545 1,18 1,094
1,26
0,224 0,0394 0,259 0,53* 0,221
0,585 1,25 1,227
1,33
0,236* 0,0437 0,271 0,56 0,246
0,615 1,32 1,368
1,405
0,25
0,0491 0,285 0,60* 0,283
0,655 1,40 1,539
1,485
0,265* 0,0552 0,300 0,63 0,312
0,69
1,50 1,767
1,585
0,28
0,0616 0,315 0,67* 0,353
0,73
1,60 2,011
1,685
0,30* 0,0707 0,335 0,71 0,396
0,77
1,70 2,27
1,785
0,315 0,0779 0,350 0,75 0,442
0,815 1,80 2,54
1,895
0,335* 0,0881 0,370 0,80 0,503
0,865 1,90 2,83
1,995
0,355 0,099
0,395 0,85 0,567
0,915 2,00 3,14
2,095
0,375* 0,1104 0,415 0,90 0,636
0,965 2,12 3,53
2,22
0,40
0,1257 0,440 0,95 0,709 1,015
2,24 3,94
2,34
0,425* 0,1419 0,465 1,00 0,785 1,08
2,36 4,36
2,46
0,45
0,1590 0,49
1,06 0,883 1,14
2,50 4,91
2,60
П р и м е ч а н и я: 1. Провода с диаметрами, отмеченными знаком *, применять только в технически обоснованных случаях.
2. Провода для механизированной укладки выпускаются: марки ПЭТВМ с диаметром d от 0,25 мм до 1,4 мм; марки ПЭТМ с
диаметрами 0,53; 0,67 и от 0,8 до 1,32 мм.
52
Требуемое расчетное сечение эффективного проводника получают параллельным соединением нескольких элементарных проводников меньшего сечения. Для уменьшения числа элементарных проводников увеличивают число параллельных ветвей обмотки.
Устройство и материалы изоляции пазовых и лобовых частей
всыпных обмоток приведены в табл. 4.6, 4.7.
Корпусную изоляцию выполняют в виде выстилающей паз коробочки из материала, указанного в позициях 1 и 2 таблиц 4.6., 4.7.
Таблица 4.6
Изоляция всыпных обмоток статоров асинхронных двигателей
с высотой оси вращения h ≤ 250 мм на напряжение до 660 В
ПоРисунок
Тип Высота зиоси
ция
(сечение па- обзовой части мот- враще- на
ния
риобмотки)
ки
h, мм сунке
2
45–80
1
1
2
Одно- 90–132
слойная
1
2
Материал
Наименование,
марка
Класс нагревостойкости
В
F
ОдноЧис- сторонТол- ло
няя
слощитолев
на,
щина,
мм
мм
Пленкостеклопласт
Изо- Имидо- 0,2
флекс
флекс
0,3
»
»
Пленкостеклопласт
Изо- Имидо- 0,25
флекс
флекс
»
»
1
0,2
1
0,3
1
0,25
0,35
1
0,35
Пленкостеклопласт
1
160
1
Изофлекс
Имидофлекс
0,4
1
0,4
2
»
»
0,5
1
0,5
0,4
1
0,4
3
Двух2 слой- 160–250
1 ная
Пленкостеклопласт
1
Изофлекс
Имидофлекс
0,4 1
0,4
2
»
»
»
»
0,5 1
0,5
3
Междуфазовые прокладки в лобовых частях обмотки выполняют из материала, указанного в позиции 1 рисунка.
53
Таблица 4.7
Изоляция всыпных обмоток статоров асинхронных двигателей
с высотой оси вращения h ≥ 280 мм на напряжение до 660 В
Рисунок
По(сечение па- зизовой части ция
на
обмотки)
рис.
5
1;2
3
Материал
ОдносторонЧисНаименование,
Толщина,
няя толщина
ло
марка
мм
изоляции, мм
слоКласс нагреев
Класс нагревостойкости
востойкости
В
F
B
F
Пленкосинтокартон
0,25 0,28
1* ПСК-Л ПСК-Ф
Электронит
0,3 0,3
2**
Общая толщина
–
пазовой изоляции 0,55 0,58
B
F
1
1
0,25
0,28
0,3
0,3
–
0,55 0,58
Лакотканеслюдопласт
ГИТГИП0,55 0,55 1 0,55 0,55
ЛСБЛСПЛСЛ
ЛСЛ
Пленкосинтокартон
4
4 ПСК-Л ПСК-Ф 0,25 0,28 1 0,25 0,28
*К обмотке
**К стенке паза
ПСК-Ф 0,25 0,28 1 0,25 0,28
5 ПСК-Л
Междуфазовые прокладки в лобовых частях обмотки выполняют из лакотканеслюдопласта (поз. 3 табл. 4.7).
3
Для повышения надежности изоляции на выходе из паза пазовые коробочки механически усиливают “манжетами”, образованными обычно отгибом краев коробочки на 180° или оклейкой их полосками прочного материала (см. рис. в табл. 4.6). Коробочки выступают с обеих сторон за торцы сердечника на 4÷8 мм. В двигателях с высотами оси вращения 160–250 мм для усиления изоляции
на выходе из паза на торцах сердечников могут быть установлены
крайние изоляционные листы 14 (рис. 3.3) из электронита толщиной
3–4 мм с пазами (серия 4А). Располагаясь в этих пазах, пазовая коробочка предохраняется от повреждения.
При высоте оси вращения h ≤ 250 мм пазовую изоляцию делают из пленкостеклопластов изофлекс и имидофлекс, при h > 250 мм
пазовые коробочки выполняют двухслойными из пленкосинтокартона и электронита. Пленкосинтокартон представляет собой композиционный материал из полиэтилентерефталатной пленки ПЭТФ, окле-
54
енной с двух сторон бумагой из фенилонового волокна (ПСК-Ф)
или лавсанового волокна без пропитки (ПСК-Л) или с пропиткой
(ПСК-ЛП).
Изоляционные прокладки между сторонами катушек двухслойных обмоток в пазу и междуфазовые в лобовых частях выполняют
из пленкостеклопласта или лакотканеслюдопласта соответствующего
класса нагревостойкости (табл. 4.6, 4.7). Лакотканеслюдопласт состоит из одного слоя флогопитового слюдопласта, оклеенного с двух
сторон стеклолакотканью. В качестве склеивающего материала применяют полиэфирноэпоксидные лаки.
Паз закрывают сверху крышкой из того же материала, что и
пазовая коробочка, но большей толщины (при h ≤ 250 мм) или заклинивают клином (при h > 250 мм). Клинья делают из стеклотекстолита СТЭФ-1 (ГОСТ 12652-74) толщиной 2,5 мм или из профильного
стеклопластика класса нагревостойкости F, получаемого путем непрерывного формования профиля клина из пропитанного эпоксиднофенольными или эпоксидными связующими стекложгута.
Для изолирования мест паек катушечных групп и обмотки с
выводными проводами, проводов межкатушечных соединений и выводных концов применяют изоляционные трубки на основе кремнийорганических резин с классом нагревостойкости Н: неармированные
марки ТКР и армированные стеклошнурчулком марки ТКСП. Внутренний диаметр трубок изменяется от 1 до 8 мм с шагом 1 мм,
толщина стенки равна 1–1,15 мм.
В качестве выводных концов применяют в основном провода
класса нагревостойкости F марки РКГМ (ГОСТ 16036-79) с изоляцией из кремнийорганической резины и наружной оплеткой из стекловолокна или марки ПВКФ с изоляцией из фторсилоксановой резины с защитной оболочкой из кремнийорганической резины.
Лобовые части всыпных обмоток для придания им определенной формы бандажируют крученой полиэфирной нитью при механизированной укладке и стеклошнурчулком АСЭЧ(б) или стеклолентой ЛЭС при ручной укладке обмотки.
Всыпные обмотки статоров пропитывают изоляционными составами, после тепловой полимеризации которых обеспечивается достаточная механическая и электрическая прочность обмотки, улучшается теплопередача от внутренних слоев обмотки к внешним и к
сердечнику статора. Для пропитки обмоток применяют лаки: алкидномеламиновый МЛ92 (только для изоляции класса В), полиэфирноизоциануратный ПЭ993, полиорганосилоксановый КО916-К и компа-
55
унды без растворителей: полиэфирные КП-34, КП-50, полиэфиримидный Б-ИД-9127 и эпоксидный ЭКД-14. В основном используют составы без растворителей, обеспечивающие примерно в два раза
лучшее заполнение обмоток смолой, чем у лаков с растворителями.
При мощности двигателя более 100 кВт выполнить всыпную
обмотку технологически сложно из-за большого числа параллельных
элементарных проводников. В этом случае обмотку статора выполняют из жестких полукатушек, намотанных изолированным проводом прямоугольного сечения. Преимущество таких обмоток по сравнению с всыпными – больший коэффициент заполнения паза за счет
применения проводов прямоугольного сечения и высокая надежность, так как в пазы укладывают готовые изолированные и проверенные полукатушки.
Для жестких полукатушек используют медный провод марки
ПЭТП-155 с эмалевой изоляцией на полиэфиримидной основе класса нагревостойкости F (табл. 4.8). Средняя двусторонняя толщина
эмалевой изоляции составляет 0,15 мм.
Намотанные на шаблон проводники полукатушки проклеивают
обволакивающим покрытием (лаком) и формуют с опрессовкой пазовых частей. Пазовые части полукатушек скрепляют фенилоновой
лакированной бумагой, лобовые части скрепляют в двух-трех местах
бандажами из стеклоленты (табл. 4.9). Крайние полукатушки каждой
катушечной группы дополнительно изолируют стеклолакотканью и
бандажируют одним слоем стеклоленты вполнахлеста.
Полукатушки укладывают в прямоугольные полуоткрытые пазы (рис. 6.5). Корпусная изоляция из лакотканеслюдопласта (табл. 4.9)
выполнена, как и для всыпных обмоток, в виде пазовых коробочек,
торцы которых выступают из сердечника на 15–20 мм. Пазы закрывают клиньями.
При укладке обмотки косые участки лобовых частей катушек,
состоящих из лобовых частей двух лежащих в одном слое паза полукатушек, перевязывают в шахматном порядке стеклошнурчулком
АСЭЧ(б) с предварительной установкой между катушками дистанционных прокладок из стеклотекстолита СТЭФ-1. Лобовые части
обмотки крепят стеклошнурчулком АСЭЧ(б) к бандажным кольцам
(рис. 3.5; 3.10).
Внутримашинные соединения изолируют двумя слоями стеклолакоткани ЛТСР. Прочие элементы системы изоляции: изоляционные
трубки, выводные концы, материал клиньев, пропиточные составы
такие же, как и для всыпных обмоток.
56
Таблица 4.8
Размеры медных проводов прямоугольного сечения
По меньшей стороне а , мм
По большей
стороне b, 1,00 1,06 1,12 1,18 1,25 1,32 1,40 1,50 1,60 1,70
мм
2,50
2,65
2,80
3,00
3,15
3,35
3,55
3,75
4,00
4,25
4,50
4,75
5,00
5,30
5,60
6,00
6,30
Расчетное сечение провода, мм 2
2,285 2,435 2,585 2,736 2,910 3,085 3,285 3,535 3,785 3,887
2,435 — 2,753 — 3,098 — 3,495 — 4,025 —
2,585 2,753 2,921 3,089 3,285 3,481 3,705 3,985 4,265 4,397
2,785 — 3,145 — 3,535 — 3,985 — 4,585 —
2,935 3,124 3,313 3,502 3,723 3,943 4,195 4,510 4,825 4,992
3,135 — 3,537 — 3,973 — 4,475 — 5,145 —
3,335 3,548 3,761 3,974 4,223 4,471 4,755 5,110 5,465 5,672
3,535 — 3,985 — 4,473 — 5,035 — 5,785 —
3,785 4,025 4,265 4,505 4,785 5,065 5,385 5,785 6,185 6,437
4,035 — 4,545 — 5,098 — 5,735 — 6,585 —
4,285 4,555 4,825 5,095 5,410 5,725 6,085 6,535 6,985 7,287
4,535 — 5,105 — 5,723 — 6,435 — 7,385 —
4,785 5,085 5,385 5,685 6,035 6,385 6,785 7,285 7,785 8,137
5,085 — 5,721 — 6,410 — 7,205
8,265 —
5,385 5,721 6,057 6,393 6,785 7,177 7,625 8,185 8,745 9,157
5,785 — 6,505 — 7,285 — 8,185 — 9,385
6,085 6,463 6,841 7,219 7,660 8,101 8,605 9,235 9,865 10,35
Продолжение табл. 4.8
Размеры медных проводов прямоугольного сечения
По меньшей стороне а , мм
По большей
стороне b, 1,80 1,90 2,00 2,12 2,24 2,36 2,50 2,65 2,80 3,00
мм
2,50
2,65
2,80
3,00
3,15
3,35
3,55
3,75
4,00
4,25
4,50
4,75
5,00
5,30
5,60
6,00
6,30
лл
Расчетное сечение провода, мм 2
4,137 —
—
—
—
—
—
—
—
—
4,407 —
—
—
—
—
—
—
—
—
4,677 4,957 5,237 —
—
—
—
—
—
—
5,038 — 5,638 —
—
—
—
—
—
—
5,307 5,622 5,937 6,315 6,693 —
—
—
—
—
5,667 — 6,337 — 7,141 —
—
—
—
—
6,027 6,382 6,737 7,163 7,589 7,829 8,326 —
—
—
6,387 — 7,137 — 8,037 — 8,826 —
—
—
6,837 7,237 7,637 8,117 8,597 8,891 9,451 10,65 10,85 —
7,287 — 8,137 — 9,157 — 10,08 — 11,35 —
7,737 8,187 8,637 9,177 9,717 10,07 10,70 11,38 12,05 12,95
8,188 — 9,137 — 10,28 — 11,33 — 12,75 —
8,637 9,137 9,637 10,24 10,84 11,25 11,95 12,70 13,45 14,45
9,177 — 10,24 — 11,51 — 12,70 — 14,29 —
9,717 10,28 10,84 11,51 12,18 12,67 13,45 14,29 15,13 16,25
10,44 — 11,64 — 13,08 — 14,45 — 16,25 —
10,98 11,61 12,24 12,99 13,75 14,32 15,20 16,15 17,09 18,35
57
Таблица 4.9
Изоляция обмоток статоров из провода прямоугольного сечения
с полуоткрытыми прямоугольными пазами (напряжение до 660 В)
Позиция
на
рис.
Часть
обмотки
Пазовая
1
2
6
1
1
7
8
Средние полукатушки
Лобовая
Крайние полукатушки группы
5
Наименование, марка
Класс нагревостойкости
В
F
Двусторонняя
Чистолщина
Толло
изоляции, мм
щислопо ши- по вына,
ев
рине соте
мм
Обволакивающее покрытие 0,05
1
0,09 1,5
Бумага телеБумага
обофоннная баке- фенилоновая
рота
лизированная лакированная
0,2
0,6
0,2
0,6
1
1,1
1,1
1
1,0
4
СТ
СТЭФ
1
0,5
5
СТ
СТЭФ
1
0,5
СТ
СТЭФ
6
–
Допуск на укладку обмотки
– Общая толщина изоляции в пазу
(без учета витковой и без высоты
– клина)
0,1 2,5
Скрепляющий бандаж из
–
–
–
0,3
2,2
1,0
0,5
0,5
0,6
4,5
0,5
0,5
1
0,1
0,1
0,6
0,6
0,4
0,4
1
2
3
4
Материал
Лакотканеслюдопласт
3 ГИТ-ЛСБ-ЛСЛ ГИП-ЛСП-ЛСЛ 0,55
Стеклотекстолит
7
8
оболенты стеклянной ЛЭС широта
риной 20 мм в двух местах
1
Обволакивающее покрытие 0,05
1
Стеклолакоткань
вполнаслой
ЛСБ-105/120 ЛСП-130/155 0,15 хлеста
впол1
наЛента стеклянная ЛЭС
0,1 вполнахлеста
хлеста
–
Общая толщина изоляции полукатушки
(без учета витковой)
1,6
1,6
–
Скрепляющий бандаж из
ленты стеклянной ЛЭС шириной 20 мм в трех местах
0,1
0,5
0,5
1
Обволакивающее покрытие
0,05
1
0,1
0,1
–
Общая толщина изоляции полукатушки
(без учета витковой)
0,6
0,6
2,5
оборота
58
При выполнении обмоток из жестких полукатушек с классом
нагревостойкости изоляции В (табл. 4.9) провод ПЭТП-155 заменяют
проводом марки ПЭТВП (ГОСТ 17708-72) с размерами по табл. 4.8.
4.3.2. Схемы обмоток статоров
4.3.2.1. Общие положения
Схема обмотки статора определяет положение катушек в пазах
сердечника и порядок соединения отдельных катушек в катушечные
группы, катушечных групп в фазы и фаз между собой. Наиболее
часто применяют развернутые схемы обмоток, на которых видны
все соединения между элементами обмотки.
Согласно ГОСТ 26772-85 у открытой схемы (с шестью выводами) трехфазных обмоток статора обозначают выводы первой, второй
и третьей фаз соответственно: начала U1, V1, W1; концы U2, V2, W2.
Для схем “звезда” и “треугольник” (с тремя выводами) используют
обозначения выводов буквами U, V, W. Вывод нулевой точки звезды
обозначают буквой N.
Для двигателей, разработанных до 1987 г. и модернизируемых,
выводы открытой схемы обмотки статора обозначают в соответствии с ГОСТ 184-73: начала фаз С1, С2, С3; концы – С4, С5, С6. Выводы обмоток, соединенных звездой или треугольником, обозначают
С1, С2, С3; вывод нулевой точки звезды – цифрой 0.
На схемах обмоток обычно обозначают все начала и концы
фаз, допустимо двойное обозначение точек соединения фаз в треугольник U1W2, V1U2, W1V2 (С1С6, С2С4, С3С5), выводы от точек
соединения обозначают U, V, W. Для схемы “звезда “ допускается
тройное обозначение точки соединения фаз U2V2W2 (С4С5С6) и
выводов фаз U1, V1, W1 (С1, С2, С3).
Трехфазные статорные обмотки двигателей общего назначения
выполняют петлевыми с шестидесятиградусной фазной зоной.
Чтобы составить схему обмотки следует рассчитать в пазах
или пазовых (зубцовых) делениях:
полюсное деление (число пазов, приходящееся на один полюс)
z 1 (2 p) ;
(4.11)
шаг обмотки (расстояние между активными сторонами катушки)
y1 ,
(4.12)
где z1 – число пазов (зубцов) сердечника статора; p – число пар полюсов; β – относительное укорочение шага, зависит от вида обмотки.
59
Число пазов на полюс и фазу
q 1 z 1 ( 2 p m1 ) ,
(4.13)
где m1 – число фаз обмотки.
Пазы сердечника изображают на схемах обмоток вертикальными линиями (рис. 4.7), номер паза проставлен в разрыве линии.
Каждая фаза обмотки содержит одинаковое число соединенных
определенным способом катушек: 2pq1 в двухслойной и pq1 в однослойной обмотке. Катушка состоит из соединенных лобовыми частями двух активных сторон в пазах сердечника, находящихся на расстоянии шага обмотки y1. Независимо от числа витков катушки на
схемах обмоток изображают одной линией. При этом хотя бы одна
из линий, изображающих активные стороны катушки, обычно совпадает с линией изображения паза.
Вследствие различного углового положения пазов сердечника в
пространстве ЭДС активных сторон катушек в соседних пазах смещены на электрический угол (в градусах)
360 p z1 .
(4.14)
Зная угол α, можно начертить звезду пазовых или катушечных
ЭДС всех пазов или катушек обмотки (рис. 4.6). Звезду катушечных
ЭДС используют для распределения катушек обмотки по фазам и
параллельным ветвям.
4.3.2.2. Схемы однослойных трехфазных обмоток статоров
Однослойной называют обмотку, у которой одна активная сторона катушки занимает весь паз по высоте. Принцип выполнения
схемы трехфазной обмотки рассмотрим на примере однослойной
обмотки с диаметральным или полным шагом (y1 = τ) и числом фаз
m1 = 3, пазов сердечника z1= 36, полюсов 2p = 4, параллельных ветвей a1= 1 (рис. 4.7). Укорочение шага таких обмоток β = y1/τ = 1.
В результате расчета по формулам (4.11)–( 4.14 ) y1 = τ = 9;
q1= 3; α = 20°. Звезда пазовых ЭДС изображена на рис. 4.6, а. Стрелками показаны векторы ЭДС первых восемнадцати пазов двух первых полюсных делений. Номер вектора ЭДС соответствует номеру
паза. С целью экономии места на диаграмме вместо изображения
векторов ЭДС восемнадцати пазов двух следующих полюсных делений проставлены их номера. Число окружностей номеров ЭДС
равно числу пар полюсов машины р.
60
а)
A(U)
Y(V)
C(W)
б)
36 19 20
35
1 2 21
18
3 22
34 17
16
4
Z(W)
33 15
33 15
5 23
6 24
C(W) 32 14
32 14
13
7
13
31
25
31 12
8
11 10 9 26
30
29 28 27
B(V)
A(U)
19
20
Ėк1 Ėк2 21
Ėк3
7
9 8
27
25
26
B(V)
X(U)
Рис. 4.6. Диаграммы векторов пазовых (а) и катушечных (б) ЭДС
однослойной обмотки: z1 = 36; 2p = 4; y1 = τ = 9; q1 = 3; a1 = 1; α = 20°
В соответствии с рассчитанным шагом y1= 9 первая катушка
образована встречным соединением активных сторон в первом и десятом пазах (рис. 4.7). Аналогично соединены активные стороны в
пазах 2 и 11 следующей второй катушки и всех остальных катушек
обмотки. В дальнейшем номер катушки однослойной обмотки принимаем равным номеру паза, в котором находится левая активная
сторона катушки.
Все катушки одинаковы по форме, поэтому рассматриваемая
обмотка называется однослойной равносекционной или шаблонной.
Рассмотрим образование ЭДС одной, например, первой катушки. Векторы ЭДС Ė1 и Ė10 активных сторон катушки на диаграмме
пазовых ЭДС (рис. 4.6, а) смещены на 180°. Активные стороны катушки встречно соединены лобовой частью, поэтому ЭДС первой
катушки ĖК1 равна арифметической сумме ЭДС векторов Ė1 и Ė10 .
Вследствие этого ЭДС катушки с диаметральным или полным шагом (y1 = τ) максимальна. Коэффициент укорочения такой катушки
и составленной из таких катушек равносекционной обмотки равен
единице для всех гармонических.
Распределение катушек по фазам для любой обмотки проще
всего выполнить с помощью звезды пазовых ЭДС (рис. 4.6, а) или
получаемой из нее звезды катушечных ЭДС (рис. 4.6, б). Звезду пазовых ЭДС (рис. 4.6, а) делят на 6 секторов (фазных зон) по 60° так,
чтобы линии деления не совпадали ни с одним из векторов ЭДС.
61
Первая
Вторая
катушка
катушка
1
3
2
U1
5
4
7
6
W2
9 11 13 15 17 19 21 23 25 27 29 31 33 35
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
V1
W1
U2
V2
Рис. 4.7. Схема трехфазной однослойной равносекционной
обмотки статора: z1 = 36; 2p = 4; q1 = 3; a1= 1; y1 = τ = 9
Диаметрально противоположные секторы первой фазы обозначены буквами А и Х, смещенные на 120° секторы второй фазы – буквами В и Y, смещенные на 240° секторы третьей фазы – буквами С и Z.
ЭДС первых трех катушек ĖК1 , ĖК2 , ĖК3 фазы А образованы
сложением ЭДС активных сторон Ė1, Ė2, Ė3 в пазах 1, 2, 3 фазной
зоны А и Ė10 , Ė11 , Ė12 в пазах 10, 11, 12 фазной зоны Х. Условно
принято считать, что ЭДС ĖК1 , ĖК2 , ĖК3 каждой катушки индуктируется только в одной активной стороне в пазах 1, 2, 3 соответвенно.
Вместо диаграммы пазовых ЭДС (рис. 4.6, а) фазы А, занимающей
секторы А и Х, рассматривают более простую звезду катушечных
ЭДС с векторами ЭДС катушек, занимающую сектор А (рис. 4.6, б).
На рис. 4.6, б векторы ЭДС первых трех катушек фазы А обозначены буквами ĖК1 , ĖК2 , ĖК3 , остальных катушек – цифрами.
Все q1 катушек одной пары полюсов фазы А с близкими по
фазе ЭДС ĖК1 , ĖК2 , ĖК3 соединяют последовательно и согласно (для
увеличения ЭДС), в результате чего образуется катушечная группа.
Аналогично образуются остальные катушечные группы всех фаз.
ЭДС катушечной группы ĖГР = ĖК1 + ĖК2 + ĖК3 (рис. 4.8, а) меньше арифметической суммы ЭДС ĖК1 , ĖК2 , ĖК3 отдельных катушек
вследствие распределения обмотки. Обмоточный коэффициент равносекционной однослойной обмотки с диаметральным шагом равен
коэффициенту распределения.
62
Каждая фаза содержит
р катушечных групп. Кату-Ė12
Ėк3 -Ė10
шечные группы одной фазы
Ė3
соединяют в соответствии с
Ė3
требуемым (и возможным)
Ėк2 -Ė11
Ėк2 -Ė11
числом параллельных ветвей,
ĖГР
учитывая одинаковую фазу
Ė2
Ė2
ЭДС всех групп катушек.
Число
параллельных
Ėк1 -Ė12
-Ė10
ветвей а1 с одинаковыми соĖк1
ĖГР
противлениями фазы одноĖ1
Ė1
слойной равносекционной обРис. 4.8. Диаграммы ЭДС катушечной
мотки определяют из условия р/а1 равно целому числу,
группы однослойной равносекционнаибольшее число паралной (а) и концентрической (б) обмоток
лельных ветвей а1 = р.
Однослойные равносекционные обмотки применяют только при
ручной укладке обмотки в пазы. Причина этого в том, что до укладки коротких активных сторон в пазы 7, 8, 9 катушечной группы
следующей фазы (например V) нельзя укладывать в пазы 10, 11, 12
длинные активные стороны катушечной группы предыдущей фазы
(U) или наоборот (рис. 4.7). Механизация процесса укладки обмотки возможна, если катушки обмотки укладывают в пазы статора
обеими активными сторонами одновременно (без “подъема шага”).
Наиболее пригодны для механизированной укладки однослойные концентрические обмотки (рис. 4.9), отличающиеся от равносекционных формой лобовых частей катушек.
а)
б)
Ėк3
1
3
2
U1
5
4
7
6
W2
9 11 13 15 17 19 21 23 25 27 29 31 33 35
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
V1
W1
U2
V2
Рис. 4.9. Схема трехфазной однослойной концентрической (двухплоскостной) обмотки статора: z1 = 36; 2p = 4; q1= 3; a1 = 1; y1 = 7, 9, 11
63
Катушечные группы обмотки образованы из концентрических
катушек. Лобовые части катушек группы вследствие их разной длины и ширины размещаются в одной плоскости и не пересекаются.
При целом q1 шаг внутренней самой узкой катушки
y1MIN = 1 + 2q1 ;
(4.15)
любой другой более широкой катушки
y1 (K +1) = y1 (K ) + 2 ,
(4.16)
где y1 (K ) – шаг предыдущей более узкой катушки.
Каждая фаза состоит из р катушечных групп. При четном р
половину групп выполняют из малых катушек (катушки 1, 2, 3 на
рис. 4.9) с короткими лобовыми частями, половину – из больших катушек (катушки 7, 8, 9) с длинными лобовыми частями. При ручной
укладке обмотки лобовые части групп из больших и малых катушек размещают в разных плоскостях, поэтому однослойную концентрическую обмотку часто называют двухплоскостной.
Вследствие разного шага отдельных катушек их ЭДС неодинаковы. Но ЭДС катушечных групп ЕГР концентрической и равносекционной обмоток (рис. 4.7) равны при прочих равных условиях, так
как ЕГР обеих обмоток образована суммированием ЭДС одинаковых
активных сторон в пазах 1, 2, 3 и 10, 11, 12 (рис. 4.8). Поэтому условно принято считать, что концентрические обмотки, как и все
другие однослойные обмотки, не имеют укорочения шага (β = 1) катушечных групп и коэффициент укорочения для всех гармонических равен единице. Это упрощает расчет обмоточного коэффициента однослойных обмоток, который принимают равным коэффициенту распределения. Очевидно, что при равных р, m1, q1 распределять
катушки однослойных концентрических обмоток по фазам можно с
помощью диаграммы катушечных ЭДС равносекционных обмоток
(рис. 4.6, б).
При четном р и одной параллельной ветви (а1 = 1) в фазе обмотка симметрична, так как в каждой фазе число групп из больших и малых катушек одинаково. При а1 > 1 для выравнивания активных и индуктивных сопротивлений параллельных ветвей следует
стремиться к тому, чтобы в каждую параллельную ветвь входило
одинаковое число групп из больших и малых катушек. Обмотку с
равным сопротивлением параллельных ветвей можно выполнить
только, если p/2a1 равно целому числу.
64
При нечетном р фаза содержит нечетное число групп катушек.
В этом случае укладка двухплоскостной концентрической обмотки
возможна, если одну катушечную группу (“кривую” или “переходную”) сделать несимметричной (рис. 4.10), выполнив одну ее сторону по размеру группы из больших катушек, вторую – по размеру
группы из малых катушек. Поэтому сопротивление фаз различно.
1
3
2
U1
7
5
4
W2 V1
6
9 11 13 15 17 19 21 23 25 27 29 31 33 35
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
W1
U2
V2
Рис. 4.10. Схема трехфазной однослойной концентрической (двухплоскостной) обмотки статора: z1= 36; 2р = 6; q1= 2; a1 = 1; y1= 5, 7
Если число катушек в группе велико (q1 > 4), концентрическая
двухплоскостная обмотка требует повышенного расхода обмоточного
провода из-за большой длины лобовых частей крайних (внешних)
катушек с шагом y1 > τ. При четном числе пазов на полюс и фазу q1
катушечную группу (рис. 4.11) делят на две половины. Лобовые
части катушек каждой половины отгибают в разные стороны. Число катушечных полугрупп фазы равно числу полюсов 2p. Шаг катушек полугруппы y1 < τ и его определяют по формулам (4.15), (4.16).
Из векторных диаграмм ЭДС полугрупп одной фазной зоны,
образованных из ЭДС катушек ĖК1 , ĖК2 и ĖК15 , ĖК16 (рис. 4.11, б),
следует, что ЭДС полугрупп равны и совпадают по фазе. Поэтому
возможное число параллельных ветвей фазы с равными сопротивлениями больше, чем у двухплоскостной концентрической обмотки, и
определяется из условия 2р/а1 равно целому числу. Максимально
возможное число параллельных ветвей фазы а1 = 2р.
При ручной укладке лобовые части одной фазы располагают в
одной плоскости, соответственно лобовые части трех фаз размещены в трех плоскостях. Поэтому такие обмотки называют трехплоскостными или концентрическими “вразвалку”. Лобовые части таких
обмоток короче, чем у концентрических двухплоскостных.
65
б)
б)
б)
б)
б) б) б) б) б) б) б) б) б) б) б) б)
б) 4б) б) б) б) б) б) б) б) б) б) б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
Активные и индуктивные сопротивления фаз различны, так как
каждая фаза состоит из групп катушек одного вида: малых, средних
или больших. Чтобы избежать этого, большие и малые катушки делают одинаковыми: с длинными лобовыми частями с одной стороны и короткими – с другой. Это усложняет укладку обмотки.
Обмотку “вразвалку” можно выполнить и для нечетного q1.
Катушечную группу делят на две полугруппы с отличающимся на
единицу числом катушек. Число а1 параллельных ветвей с равными
сопротивлениями фазы такой обмотки вдвое меньше, чем при четном q1, и определяется из условия р/а1 равно целому числу.
В машинах с большим числом полюсов при малом числе пазов статора однослойная концентрическая обмотка может быть выполнена и с дробным числом пазов на полюс и фазу q1 (рис. 4.12).
Последнее характерно для серийного производства при использовании штампов сердечника статора с одинаковой геометрией зубцовой
зоны в 6- и 8-полюсных или 10- и 12-полюсных машинах.
В катушечной группе возможно только целое число катушек,
поэтому для получения дробного q1 применяют катушечные группы
с разным числом катушек, обычно отличающимся на единицу.
Дробное q1 можно представить в виде
q1 b c d .
(4.17)
Здесь b – целое число; c/d – правильная несократимая дробь; d – знаменатель дробности (не должен делиться на три для симметричных
трехфазных обмоток), обычно для однослойных обмоток асинхронных двигателей d = 2.
66
Обмотка фазы состоит из p/d периодически повторяющихся
или “первоначальных” обмоток (катушки 1, 2, 10 и 19, 20, 28 на
рис. 4.12). Каждая повторяющаяся часть обмотки включает в себя d
катушечных групп, содержащих N = bd + c следующих одна за другой катушек. Из d катушечных групп в с групп входит по (b + 1)
катушек, а в (d – с) групп по b катушек.
При знаменателе дробности d = 2 шаг внутренней самой узкой
катушки в с группах по (b + 1) катушек
y1MIN = 1 + 2b,
(4.18)
в (d – c) группах по b катушек
y1 MIN = 1 + 2(b + 1).
(4.19)
Шаги более широких катушек определяют по формуле (4.16).
Как и у однослойных обмоток с целым q1, катушки образованы соединением активных сторон в пазах диаметрально противоположных секторов звезды пазовых ЭДС (рис. 4.13, а). Векторы ЭДС
показаны линиями, изображающими катушки разных фаз на схеме
обмотки (рис. 4.12).
У обмотки с дробным q1 число векторов ЭДС в диаметрально
противоположных секторах, например А и Х (рис. 4.13, а), отличается на единицу. Вследствие этого у части катушек фазы одна из катушечных сторон занимает ближайший паз соседней фазной зоны.
Например, по одной активной стороне катушек 2 и 20 фазы А уложены соответственно в пазы 5 и 23 фазы В.
Звезда катушечных ЭДС (рис. 4.13, б) равносекционной обмотки
с тем же q1 образована из векторов ЭДС активных сторон катушек
в секторах А, В, С. При этом из d кругов векторов (или номеров)
ЭДС, содержащих “первоначальную” обмотку, в с кругов входит
по (b + 1) векторов ЭДС, а в (d – c) кругов – по b векторов. Следует
иметь в виду, что действительная звезда катушечных ЭДС рассматриваемой обмотки с дробным q1 (рис. 4.13, в) состоит из совпадающих по фазе векторов ЭДС разной длины.
По условиям симметрии фаз обмоток с дробным q1 начальные
катушки фаз (катушки 1, 4, 7 на рис. 4.12) следует выбирать так,
чтобы ЭДС этих катушек были смещены на 120° (рис. 4.13, б). При
этом возможное наименьшее расстояние в пазах между начальными
катушками фаз равно N при четном знаменателе дробности d и 2N
при нечетном d.
67
б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б)
б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б) б)
б)
б)
б)
б)
б)
а)
A(U)
б)
28
20
319
10
3
1 2
A(U)
28
3
Y(V)
36
19
310
27
18
35
б)
б)
9 1 2
C(W) 34
Z(W)
20
11
12
26
21
30
C(W) 34
3
4 13
в)
22 31
5
14
15
B(V)
23
24
32
33
б) б) 8
7
б) 6
25
29
X(U)
C(W)
25
8
16
7
4 13 22
31
14
32
B(V)
A(U)
19,20; 28
1,2 ;10
7,8; 16 4; 13,14
25,26; 34 22; 31,32 B(V)
Рис. 4.13. Звезда пазовых (а) и катушечных (б, в) ЭДС трехфаз1
ной однослойной концентрической обмотки с q1= 1 /2 (рис. 4.12)
Возможное число параллельных ветвей a1 фазы однослойной
обмотки с дробным q1 можно определить из условия р/a1d равно
целому числу.
По возможности следует избегать применения обмоток статора
с дробным q1 вследствие худшего гармонического состава МДС и
магнитного потока таких обмоток по сравнению с обмотками с целым q1.
68
Применение однослойных обмоток требует повышенного расхода обмоточного провода за счет большого вылета лобовых частей. Отсутствие перекрытия фазных зон (укорочения шага) концентрических однослойных обмоток со сплошной фазной зоной не позволяет существенно уменьшить наиболее сильно выраженные пятую и седьмую гармонические МДС. Это приводит к ухудшению
формы магнитного поля в зазоре машины, увеличению добавочных
потерь, провалам в механической характеристике, магнитному шуму.
Для уменьшения этих вредных явлений в машинах с однослойными обмотками статора необходимо принимать специальные меры:
рациональное сочетание числа пазов статора и ротора, скос пазов.
Вследствие этих недостатков однослойные обмотки статора
применяют в двигателях мощностью до 10–15 кВт. В более мощных машинах обмотки статора двухслойные.
4.3.2.3. Схемы двухслойных трехфазных обмоток статоров
Двухслойными называют обмотки, у которых по высоте каждого паза уложены активные стороны двух разных катушек. Обычные двухслойные обмотки выполняют равносекционными из одинаковых катушек. Для улучшения формы магнитного поля в зазоре
машины катушки двухслойных обмоток делают с укороченным шагом y1 ≈ 5/6 τ при числе полюсов 2р > 2 и y1 ≈ (0,58–0,63)τ в двухполюсных машинах. При этом уменьшается длина лобовых частей
и расход провода по сравнению с однослойными обмотками.
Лежащие в верхнем слое паза активные стороны катушек изображают на схеме обмотки (рис. 4.14) сплошными линиями. Пунктирными линиями показаны активные стороны в нижнем слое паза.
В середине лобовых частей катушек выполняют изгиб, обеспечивающий соединение активных сторон верхнего и нижнего слоев без
пересечения лобовых частей обмотки.
Номер катушки условно считают равным номеру паза, в котором активная сторона катушки лежит в верхнем слое.
Так как в каждом пазу находятся две активные стороны, при
равном числе пазов сердечника z1 число катушек двухслойных обмоток в два раза больше, чем у однослойных, и равно z1. Поэтому
звезда катушечных ЭДС двухслойной обмотки совпадает с диаграммой пазовых ЭДС однослойной обмотки (рис. 4.6, а) при равном z1.
Каждый вектор на рис. 4.6, а соответствует ЭДС одной катушки.
В каждую фазу двухслойной обмотки с целым q1 входит 2р
69
групп катушек, состоящих из q1 последовательно и согласно соединенных катушек. Катушки одной катушечной группы занимают одну фазную зону.
Если число параллельных ветвей фазы а1 = 1, то соседние катушечные группы соединяют последовательно и встречно, так как
ЭДС этих групп, занимающих диаметрально противоположные фазные зоны (рис. 4.6, а), отличаются по фазе на 180°. Последнее обстоятельство следует учитывать и при составлении схем обмоток с
числом параллельных ветвей а1 > 1. Возможное число параллельных
ветвей фазы с равными сопротивлениями определяют из условия
2р/а1 равно целому числу. Максимальное число параллельных ветвей с одинаковыми сопротивлениями у двухслойной обмотки с целым q1 равно числу полюсов машины 2p.
1
3
5
2
4
V2
U1
7
6
9 11 13 15 17 19 21 23 25 27 29 31 33 35
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
W2
V1
W1
U2
Рис. 4.14. Схема трехфазной двухслойной петлевой (равносекционной) обмотки статора: z1 = 36; 2p = 4; q1 = 3; a1 = 1; y1 = 7
Равносекционная двухслойная обмотка с дробным q1 (рис. 4.15)
содержит в каждой фазе 2р/d повторяющихся или “первоначальных”
обмоток (две “первоначальные” обмотки фазы А(U) состоят из катушек 1, 2, 3, 9, 10 и 16, 17, 18, 24, 25). Число параллельных ветвей
двухслойных обмоток с дробным q1 определяют из условия 2р/dа1
равно целому числу.
В остальном все сказанное выше для однослойных обмоток с
дробным q1 справедливо и для двухслойных обмоток с дробным q1.
70
а)
1
3
2
5
4
V2 U1
б)
Y(V)
7
6
9 11 13 15 17 19 21 23 25 27 29
8 10 12 14 16 18 20 22 24 26 28 30
W2 V1
W1
A(U)
30 16 17
29 15 1 2 18
3
14
4 19 Z(W)
28 13
5 20
C(W) 27 12
11
26
6
10 9 8 7 21
25 24 23 22
B(V)
X(U)
U2
Рис. 4.15. Схема (а) и звезда (б)
катушечных ЭДС двухслойной
петлевой (равносекционной) об1
мотки: z1 = 30; 2p = 4; q1 = 2 /2;
a1 = 1; y1 = 6; α = 24°
Двухслойные равносекционные обмотки с перекрещивающимися лобовыми частями допускают только ручную укладку, так как
все верхние стороны катушек можно уложить в пазы только после
укладки нижних сторон. Следовательно, невыполнимо основное условие механизированной укладки: одновременная укладка в пазы
обеих активных сторон катушки.
4.3.2.4. Схемы обмоток для механизированной укладки
Для механизированной укладки применяют одно-двухслойные
и двухслойные концентрические обмотки, сочетающие в себе достоинства однослойных (возможность укладки без пересечения лобовых
частей) и двухслойных (возможность укорочения шага) обмоток.
Одно-двухслойная концентрическая обмотка (рис. 4.16) выполнима только при q1 > 2. Такая обмотка образуется из базовой равносекционной двухслойной обмотки, если в пазах с двумя активными сторонами одной фазы (пазы 1, 10, 19, 28 фазы А на рис. 4.14)
заменить эти две активные стороны одной активной стороной большой катушки с удвоенным числом витков (катушки 1, 10, 19, 28
71
фазы А на рис. 4.16, а показаны линиями удвоенной толщины). В
остальных пазах остаются активные стороны тех же катушек, что и
у базовой равносекционной двухслойной обмотки. Как у всех двухслойных обмоток пунктирными линиями показаны активные стороны катушек, расположенные в нижних слоях обмотки. Во избежание пересечения лобовых частей все катушки в катушечной группе
концентрические. Число катушечных групп равно числу полюсов 2р.
Каждая катушечная группа обычно состоит из (q1 – 1) катушек
и содержит одну большую и (q1 – 2) малых катушек.
Шаг большой (внешней) катушки катушечной группы
y1МАХ = 3q1 – 1,
(4.20)
малых катушек, расположенных концентрически внутри большой,
y1(K+1) = y1(K) – 2,
(4.21)
где y1(K) – шаг предыдущей более широкой катушки.
Одно-двухслойные концентрические обмотки укладывают в несколько операций – переходов. Схему укладки обмотки по переходам оформляют в виде таблицы, составленной по алгоритму укладки (табл. 4.10). В таблице (рис. 4.16, б) стороны катушек показаны
линиями, изображающими катушки на схеме обмотки (рис. 4.16, а).
Таблица 4.10
Алгоритмы укладки одно-двухслойных концентрических обмоток
№ перехода
1
2
3
4
5
Число пар полюсов р
Четное, любое
р=1
i
i
nГ = 1 1 i
1
i + q1 yГ = 4q1 i + q1
i + 4q1
i + 2q1 nГ = 3p/2 i + 2q1 2
i + 2q1
i + 3q1
i + 3q1
yГ = 3q1
i + q1
1
2
i + 4q1
nГ = 2
i + 3q1
р=3
1 yГ = 6q1 1
nГ = 3
2
yГ = 3q1
1 nГ = 6 2
Последовательность (алгоритм) укладки одно-двухслойной концентрической обмотки (табл. 4.10) записывают в виде двух столбцов. В правом столбце указывают шаг между катушечными группами yГ и число групп nГ, укладываемых за один переход. Шаг yГ –
это расстояние между одинаковыми активными сторонами одинаковых катушек двух соседних катушечных групп, укладываемых за
один переход. Например, шаг между большими катушками 7 и 19
соседних катушечных групп первого перехода yГ = 12. Число укла-
72
дываемых за один переход катушечных групп nГ ограничено необходимостью установки изоляционных прокладок в пазах и между
лобовыми частями катушек обмотки.
В левом столбце число строк соответствует числу переходов,
необходимому для укладки обмотки. В первой строке буква i обозначает номер произвольно выбранного базового паза, с которого
начинается укладка первой катушечной группы первого перехода.
Результат вычисления каждой следующей строки указывает номер
паза, с которого начинается укладка первой катушечной группы
данного перехода, по отношению к базовому пазу с номером i. Если yГ и nГ разных переходов неодинаково, то в обоих столбцах алгоритма (табл. 4.10) дополнительно указан индекс (1 или 2), характеризующий способ выполнения перехода.
В каждую параллельную ветвь фазы должны входить катушечные группы с одинаковым числом активных сторон малых катушек
в верхних и нижних слоях пазов. Так, в схеме обмотки на рис. 4.16
возможно образование двух параллельных ветвей фазы С(W) с равными сопротивлениями: первой последовательным согласным соединением двух групп из катушек 4, 5 и 22, 23; второй – двух групп из
катушек 13, 14 и 31, 32. Поэтому у одно-двухслойных обмоток число параллельных ветвей вдвое меньше, чем у базовой равносекционной двухслойной обмотки. Кроме того, при нечетном р активные
стороны малых катушек одной фазы укладывают в разные слои обмотки, то есть сопротивления обмоток всех фаз немного отличаются даже при числе параллельных ветвей а1 = 1.
При q1 > 4 одно-двухслойная концентрическая обмотка может
содержать две большие катушки в каждой катушечной группе, состоящей из (q1 – 2) катушек.
Одно-двухслойные концентрические обмотки более трудоемки,
чем однослойные, и поэтому не используются при массовом производстве двигателей малой мощности. Такие обмотки применяют в
машинах мощностью 15–100 кВт при q1 ≤ 6.
В двигателях с q1 > 6 применение одно-двухслойных обмоток
нецелесообразно вследствие большой длины вылета лобовых частей,
для размещения которых необходимо увеличивать длину станины и
размеры всей машины. В этом случае предпочтительно использование двухслойной концентрической обмотки без подъема шага.
Двухслойная концентрическая обмотка (рис. 4.18) отличается от
базовой равносекционной (рис. 4.14) с равными 2р и q1 соединением
лобовых частей, шагом и положением катушек в слоях обмотки.
а)
1
б)
3
2
V2
7
5
4
6
U1
9 11 13 15 17 19 21 23 25 27 29 31 33 35
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
W2
V1
W1
U2
1
2
3
4
низ
верх
низ
верх
низ
верх
низ
Рис. 4.16. Схема (а) и таблица укладки по переходам (б) трехфазной одно-двухслойной концентрической обмотки статора: z1 = 36; 2p = 4; q1 = 3; a1 = 1; y1 = 8, 6 (схема базовой обмотка на рис. 4.1
73
Номер паза
Номер
Часть
перехода 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
1
паза
верх
74
Фаза обмотки с целым числом пазов на полюс и фазу q1 состоит из 2р катушечных групп, образованных из q1 концентрических
катушек. Пунктирными линиями на схеме (рис. 4.18, а) показаны
стороны катушек, лежащие в нижнем слое обмотки. Шаг большой
(внешней) катушки равен числу пазовых делений между первой и
последней активными сторонами катушек одной катушечной группы
базовой равносекционной обмотки:
y1МАХ = y1 + (q1 – 1),
(4.22)
где y1 – шаг базовой равносекционной обмотки с равными 2р и q1.
Шаг малых катушек определяют по формуле (4.21).
Двухслойную концентрическую обмотку при четном числе пар
полюсов р и р = 1 укладывают по алгоритму соответствующих одно-двухслойных обмоток (табл. 4.10). Схему укладки по переходам
оформляют в виде таблицы (рис. 4.18, б).
Для уменьшения длины вылета лобовых частей в двухполюсных машинах с четным q1 ≥ 4 каждую катушечную группу разбивают на две равные концентрические полугруппы с числом катушек
q1П = q1/2. Способ образования полугрупп показан на рис. 4.17. Шаг
большой (внешней) катушки полугруппы определяют по формуле (4.22), заменив q1 на q1П ; шаги малых катушек полугруппы – по
формуле (4.21).
1-я полугруппа
б)
а)
2-я полугруппа
1
2
3
4
5
6
7
9 11
8 10 12
1
2
3
4
5
6
7
9 11
8 10 12
Рис. 4.17. Деление катушечной группы (а) с q1 = 4 двухслойной
концентрической обмотки на две полугруппы (б) с q1П = 2
Полугруппы соединяют последовательно-согласно. Обмотку укладывают за шесть переходов по алгоритму, приведенному в табл. 4.11
а)
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
б)
V2
W2
V1
W1
U2
75
U1
Номер паза
Номер
Часть
перехода 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
1
паза
верх
1
2
3
4
низ
верх
низ
верх
низ
верх
низ
Рис. 4.18. Схема (а) и таблица укладки по переходам (б) трехфазной двухслойной концентрической обмотки статора: z1 = 36; 2p = 4; q1 = 3; a1 = 1; y1 = 5, 7, 9 (схема базовой обмотки на рис. 4.14)
76
Таблица 4.11
Алгоритмы укладки двухслойных концентрических обмоток (q1 целое)
№
перехода
1
2
3
4
5
6
Число пар полюсов р
р=1
(укладка полугруппами)
i
yГ = 6q1П
i + 2q1П
nГ = 2
i + 4q1П
i + 5q1П
i + 3q1П
i + q1П
Нечетное, любое
i
i + q1
i + 2q1
i + 3q1
i + 4q1
i + 5q1
yГ = 6q1
nГ = р
Способ записи алгоритма и обозначения в таблице те же, что
приняты ранее для одно-двухслойных обмоток (табл. 4.10). В
табл. 4.11 также записан алгоритм укладки двухслойных концентрических обмоток при любом нечетном числе пар полюсов р.
Все сказанное выше относительно образования и числа а1 параллельных ветвей, а также симметрии фаз одно-двухслойных обмоток справедливо и для однослойных концентрических обмоток с
целым q1. Исключение составляют обмотки двухполюсных машин с
шагом базовой равносекционной обмотки y1 = 2τ/3, фазы которых
при одной параллельной ветви симметричны по укладке катушек и
имеют равное сопротивление.
При дробном числе пазов на полюс и фазу q1 фаза концентрической обмотки состоит из 2р катушечных групп с числом катушек,
отличающимся на единицу (см. пункты 4.3.2.2, 4.3.2.4). При знаменателе дробности d = 2 шаг большой (внешней) катушки
y1МАХ = y1 + (q1 ± 1/2) – 1,
(4.22,а)
здесь y1 – шаг базовой равносекционной обмотки с теми же, что и
у концентрической обмотки 2р и q1; знаки “+” и “–” для большой
(внешней) катушки катушечной группы соответственно с большим
числом (b + 1) и с меньшим числом b катушек. Шаги малых катушек определяют по формуле (4.21).
Для укладки обмоток с дробным q1 и знаменателем дробности
d = 2 можно использовать алгоритмы, приведенные в табл. 4.12. В
левых столбцах алгоритмов знак “+” означает, что первый переход
начинается катушечной группой с (b + 1) катушек, знак “–” соответвствует началу первого перехода с группы, содержащей b катушек.
77
Таблица 4.12
Алгоритмы укладки двухслойных концентрических обмоток (q1 дробное)
№
перехода
1
2
3
4
5
6
Число пар полюсов р
Четное, любое
Нечетное, любое
i
yГ = 4q1
i
yГ = 6q1
i + q1 ± 1/2
nГ = 3р/2
i + q1 ± 1/2
nГ = р
i + 2q1
i + 2q1
i + 3q1 ± 1/2
i + 3q1 ± 1/2
i + 4q1
i + 5q1 ± 1/2
4.3.2.5. Рекомендации по выбору типа обмотки статора
В табл. 4.13 приведены области возможного применения рассмотренных типов обмотки статоров асинхронных двигателей серий 4А и АИ в зависимости от высоты оси вращения h и числа
полюсов машины 2р.
Таблица 4.13
Применяемые типы обмоток статоров асинхронных двигателей
Тип обмотки
Высота оси вращения h, мм
h ≤ 132
160 – 250
280 – 355
1. Однослойная концентрическая
2р > 2
2p > 4
при Р2Н < 15 кВт
–
2. Однослойная концентрическая
“вразвалку”
2р = 2
2р ≥ 4, q1 ≥ 4
при Р2Н < 18,5 кВт
–
3. Одно-двухслойная концентрическая
–
2р > 2
–
4. Двухслойная концентрическая
–
2р = 2
2р ≥ 10
5. Двухслойная петлевая равносекционная всыпная
–
2р любое
2р ≥ 10
6. Двухслойная петлевая равносекционная из жестких полукатушек
–
–
2р < 10
2р любое*
* Для двигателей со степенью защиты IP23.
78
Пользуясь данными табл. 4.13 можно выбрать тип обмотки
статора проектируемого двигателя. При этом следует отдавать предпочтение обмоткам типа 1–4, допускающим механизированную
укладку в пазы сердечника.
4.4. Обмотки роторов
4.4.1. Устройство и изоляция обмоток фазных роторов
Обмотку фазного ротора выполняют с тем же числом полюсов 2р и числом фаз m2 = m1, что и обмотка статора. В двигателях
общего назначения (h < 400 мм) применяют два вида обмоток: всыпные при мощности до 50–55 кВт (обычно при h ≤ 200 мм) и стержневые при больших мощностях (обычно при h ≥ 225 мм). Система
изоляции обмоток ротора соответствует классу нагревостойкости F.
Мягкие катушки всыпной обмотки наматывают изолированным
медным проводом круглого сечения марок ПЭТ-155 или ПЭТМ с
наружным диаметром не более 1,7 мм (табл. 4.5). Лобовые части катушек формуют в виде трапеции. Все катушки одной фазы мотают
на шаблонах без разрыва провода для уменьшения числа соединений пайкой.
Катушки укладывают в два слоя в полузакрытые пазы трапецеидальной формы (рис. 4.19). Корпусная и межфазовая изоляция
выполнены так же, как и у статорных обмоток (см. п. 4.3.1). Материал и размеры деталей изоляции, соответствующие позициям 1 и 2
на рис. 4.19, приведены в табл. 4.6. Вместо приведенных в табл. 4.6
материалов для пазовых коробочек рото3
ра часто применяют лакотканеслюдопласт ГИП-ЛСП-ПЛ (поз. 1 на рис. 4.19)
толщиной 0,4 мм.
1
Пазовую часть катушки крепят
клиньями 3 из стеклотекстолита СТЭФ-1.
2
Лобовые части катушек привязывают к
4
изолированным обмоткодержателям 10
(рис. 4.20) бандажной стеклолентой ЛСБ.
Стержневые обмотки выполняют из
Рис. 4.19. Сечение паза
медной проволоки (шины) прямоугольнофазного ротора:
го сечения (табл. 4.14) и укладывают в
1 – пазовая коробочка;
2 – прокладка; 3 – клин;
полузакрытые пазы прямоугольной формы.
4 – обмоточный провод
79
Таблица 4.14
Размеры медных шин для стержневых обмоток фазных роторов
По большей
стороне a, 1,81
мм
10,8
19,3
11,6
20,8
12,5
22,4
13,5
24,2
14,5
26,1
15,6
28,0
16,0
—
16,8
—
18,0
—
19,5
—
20,0
—
22,0
—
25,0
—
26,3
—
28,0
—
1,95
20,9
22,4
24,2
26,1
28,0
30,2
—
32,6
—
—
—
—
—
—
—
По меньшей стороне b , мм
2,10 2,26 2,44 2,50 2,63 2,83
Расчетное сечение шины, мм 2
22,2 23,9 25,9 — 27,9 30,1
23,9 25,7 27,8 — 30,0 32,3
25,8 27,8 30,0 30,8 32,4 34,9
27,9 30,0 32,4 — 35,0 37,7
30,0 32,3 34,9 — 37,6 40,5
32,3 34,8 37,6 — 40,5 43,7
—
—
— 39,5 —
—
34,8 37,5 40,5 — 43,7 47,0
37,3 40,2 43,4 — 46,8 50,4
— 43,6 47,1 — 50,8 54,7
—
—
— 49,5 —
—
—
—
—
— 57,4 61,8
—
—
—
—
— 70,3
—
—
—
—
—
—
—
—
—
—
—
—
3,00 3,05
—
—
37,0
—
—
—
47,5
—
—
—
59,5
—
74,5
—
—
32,4
34,9
37,6
40,7
43,7
47,1
—
50,7
54,4
59,0
—
66,6
75,8
79,7
—
Продолжение табл. 4.14
Размеры медных шин для стержневых обмоток фазных роторов
По большей
стороне a,
мм
10,8
11,6
12,5
13,5
14,5
15,6
16,0
16,8
18,0
19,5
20,0
22,0
25,0
26,3
28,0
3,28 3,53
34,9
35,7
40,5
43,8
47,1
50,7
—
54,6
58,5
63,5
—
71,7
81,5
85,8
91,3
37,6
40,5
43,6
47,2
50,6
54,6
—
58,8
63,0
68,3
—
77,2
88,3
92,3
98,3
По меньшей стороне b , мм
3,80 4,0 4,1 4,4 4,7 5,0 5,1 5,5
Расчетное сечение шины, мм 2
40,5 — 43,4 46,6 49,9 — 54,2 58,5
43,6 — 46,7 50,1 53,6 — 58,3 62,9
47,0 49,5 50,4 54,1 57,9 — 62,9 67,9
50,8 — 54,5 58,5 62,6 — 68,0 73,4
54,6 — 58,6 62,9 67,3 — 74,1 78,9
58,8 — 63,1 67,6 72,4 — 78,7 84,9
— 63,5 —
—
— 79,1 —
—
63,3 — 68,0 73,0 78,1 — 84,8 91,5
67,9 — 72,9 78,3 83,7 — 90,9 98,1
73,6 — 79,1 84,3 90,8 — 98,6 106,4
— 79,5 —
—
— 99,1 —
—
83,1 — 89,1 95,8 102,5 — 111,3 120,1
94,5 99,5 101,4 109,1 116,5 124,1 126,6 136,6
99,4 — 106,9 114,3 122,7 — 133,2 143,8
105,9 111,5 113,9 122,3 130,7 — 141,9 153,1
80
В каждом пазу по высоте лежат два стержня (см. рис. а в
табл. 4.15), заранее изолированных и изогнутых по шаблону с одной
стороны. Стержни покрыты твердой изоляцией, получаемой обкаткой при температуре 200–250 °С и последующей опрессовкой материалов, образующих изоляционное покрытие стержня (табл. 4.15).
Стержни вставляют в пазы с торца ротора, после чего отгибают в нужную сторону вторую прямую сторону стержня.
Таблица 4.15
Изоляция стержневых обмоток фазных роторов асинхронных
двигателей с высотой оси вращения h ≥ 225 мм на напряжение
до 750 В (класс нагревостойкости системы изоляции F)
Часть обмотки
Двусторонняя
Пози- Наименование, Толщи- Число
толщина
ция на
марка
на,
слоев изоляции, мм
рисунматериала
мм
по ши- по выке
рине соте
1
Пазовая
5
1
2
4
3
ЛСПЭ-934-ТП
2
Стеклолако0,15
1
ткань
ЛСП-130/155
3; 4; 5 Стеклотексто- 0,5
1
лит СТЭФ-1
–
Допуск на укладку обмотки
–
Лобовая
6
6
б)
3,5
1,1
оборота
2,2
Лента стеклослюдинитовая
а)
7
Пленкосинто- 0,16
фолий ПСФ-Ф
или
7
–
Общая толщина изоляции в
пазу (без высоты клина)
Лента стекло- 0,15
1
слюдинитовая
вполнаЛСПЭ-934-ТП
хлеста
Лента стек0,1 1 вполнахлеста
лянная ЛЭС
Общая толщина изоляции
лобовой части стержня
0,3
0,3
–
0,5
0,3
0,5
1,7
4,0
0,6
0,6
0,4
0,4
1,0
1,0
81
На зачищенные от изоляции концы стержней 6 надевают медные коробочки – хомутики 7 (рис. 4.20). Для заполнения промежутков между стержнями 6 вставляют медные клинья 13 и выполняют
пайку хомутиков твердыми припоями. Для улучшения вентиляции
в часть хомутиков впаивают вентиляционные лопатки 8 из листовой стали толщиной 0,8 мм. Хомутики и места паек изолируют так
же, как и лобовую часть катушек (поз. 6, 7 в табл. 4.15).
а)
б)
в) 7
7
1 2 3;4 5 6 7
8
6
13
9
10
8
12 11
Рис. 4.20. Торцевая часть фазного ротора со стержневой обмоткой:
1 – сердечник; 2 – пазовая коробочка (поз. 2 в табл. 4.15); 3 –
лакоткане-слюдопласт ГИП-ЛСП-ЛСЛ толщиной 0,55 мм; 4 –
стеклолента ЛЭС тол-щиной и шириной 0,2 × 20 мм; 5 – лента
стеклянная бандажная ЛСБ тол-щиной и шириной 0,2 × 20 мм; 6 –
стержни; 7 – хомутик; 8 – вентиляци-онная лопатка; 9 – отвод
обмотки ротора к контактным кольцам; 10 – об-моткодержатель; 11
– вал ротора; 12 – кольцевая шпонка; 13 – медный клин; 14 –
нажимная шайба
На лобовые части катушек накладывают бандаж 5 из бандажной стеклоленты ЛСБ. Бандаж прижимает лобовые части к изолированной опорной поверхности обмоткодержателей 10 (рис. 4.20, а).
Обмоткодержатели отливают из стали заодно с нажимными шайбами 14, удерживающими в спрессованном состоянии сердечник.
14
4.4.2. Схемы обмоток фазных роторов
Трехфазные обмотки фазных роторов асинхронных двигателей
общего назначения выполняют двухслойными с шестидесятиградусной фазной зоной.
По ГОСТ 26772-85 обозначают выводы первой, второй, третьей фаз соответственно: начала K1, L1, M1; концы K2, L2, M2. В двигателях общего назначения обмотки трех фаз ротора соединяют по
82
схеме “звезда”. Три вывода, присоединяемые к контактным кольцам, обозначают буквами K, L, M. Также маркируют выводы при соединении обмотки ротора треугольником. Если нужен вывод нулевой точки звезды, то его обозначают буквой Q.
Для двигателей, разработанных до 1987 года и модернизируемых, выводы обмоток фазного ротора обозначают в соответствии с
ГОСТ 184-73: начала фаз Р1, Р2, Р3; концы – Р4, Р5, Р6. Выводы обмоток, соединенных звездой или треугольником, обозначают Р1, Р2,
Р3; вывод нулевой точки звезды – цифрой 0.
Контактные кольца обозначают так же, как присоединенные к
ним выводы обмотки ротора. На валу контактные кольца расположены в указанном выше порядке чередования фаз. Кольцо, соединенное с выводом первой фазы (К или Р1), наиболее удалено от
обмотки ротора.
Всыпные обмотки фазных роторов выполняют двухслойными
петлевыми равносекционными с укороченным шагом y2 = (0,7–0,85)τ.
Число пазов на полюс и фазу q2 всыпной обмотки ротора обычно
меньше, чем у обмотки статора:
q2 q1 K ,
(4.23)
где K = 1 или K = 1/2; иногда принимают K = –1 или K = –1/2.
Обычно число q2 целое или дробное со знаменателем дробности d = 2. Число пазов сердечника ротора
z2 z1 q2 q1 .
(4.24)
Расчет шагов и составление схем всыпных обмоток ротора выполняют так же, как и для двухслойных равносекционных обмоток
статора (см. параграф 4.3).
Для уменьшения числа соединений между катушечными группами стержневые обмотки фазных роторов выполняют двухслойными волновыми с диаметральным или близким к диаметральному
шагом y2 ≈ τ. Число пазов на полюс и фазу q2 стержневой обмотки
ротора больше, чем у обмотки статора:
q2 q1 K ,
(4.25)
1
где K = 1 или K = 1/2; иногда выполняют обмотки с K = 1 /2 .
Число пазов сердечника ротора определяют по формуле (4.24).
Волновые обмотки отличаются от петлевых тем, что последовательно соединяют катушки, занимающие одинаковое положение
83
под всеми полюсами машины. Поэтому расстояние между точками
соединения начала и конца одной катушки с другими катушками
(результирующий шаг) равно 2τ или 6q2.
Расстояние между стержнями одной катушки со стороны выводов (рис. 4.21, а) называют первым частичным или передним шагом y2П, между стержнями разных катушек со стороны противоположной выводам – вторым частичным или задним шагом y2З . Сумма
переднего и заднего шагов y2П + y2З = 2τ = 6q2. Укорочение шага одновитковых стержневых катушек не уменьшает расхода меди на
лобовые части, так как уменьшение длины лобовых частей с одной
стороны сердечника компенсируется увеличением лобовых частей с
противоположной стороны.
При целом q2 волновые стержневые обмотки выполняют с диаметральным или полным шагом (β = 0) и шаги обмотки равны
y2 П y2З 3q2 .
(4.26)
Другие требуемые для составления схемы обмотки величины определяют по формулам (4.11)–(4.14), заменив в них индекс “1” на “2”.
Образование фазы волновой стержневой обмотки с q2 = 2 показано на рис. 4.21. Чтобы исключить лишние пересечения лобовых
частей, схему волновой обмотки начинают с последней катушки
фазной зоны какой-либо пары полюсов. Так, за начало первой фазы А (К) на рис. 4.21, а принята вторая катушка (точка 2в стержня
в верхнем слое второго паза). При принятом шаге y2П = τ = 6 концом
второй катушки является точка 8н стержня в нижнем слое восьмого паза. Конец второй катушки соединяют с началом катушки 14,
отстоящим на 2τ = 12 от начала второй катушки, для чего с шагом
y2З = 6 соединяют стержень в нижнем слое паза 8 со стержнем в
верхнем слое паза 14. Аналогично соединяют все катушки с одинаковой фазой ЭДС (катушки 2 и 14 на рис. 4.21, в) и совершают первый обход обмотки. Если продолжить обход с шагом y2З = 6, то конец катушки 14 (точка 20н) должен быть соединен с началом катушки 2 (точка 2в), и обмотка замыкается после первого обхода.
Чтобы избежать этого, последний задний шаг первого обхода
укорачивают (удлиняют) на одно пазовое деление и, приняв y2ЗУ = 5,
соединяют конец последней катушки 14 первого обхода (точка 20н)
с началом первой катушки 1 (точка 1в) второго обхода. Аналогично
совершают второй и все последующие обходы обмотки. В результате q2 обходов будет последовательно соединена в одну ветвь по-
84
ловина всех катушек фазы (катушки 2, 14, 1, 13) в пределах одной
фазной зоны А(Х) на рис. 4.21, б.
Приняв за начало второй ветви последнюю катушку 8 той же
пары полюсов (точка 8в на рис. 4.21, а), что и для фазной зоны А,
последовательно соединяют катушки 8, 20, 7, 19 фазной зоны Х(К),
в результате чего получают вторую ветвь обмотки (показана на
рис. 4.21, а тонкой линией).
Соединив концы ветвей обмотки (точки 19н, 1н) короткой перемычкой, получают обмотку фазы с числом параллельных ветвей
а2 = 1. Два оставшихся вывода – начало и конец первой фазы – обозначают K1(Р1), K2(Р4). В редких случаях при большом напряжении
на контактных кольцах волновую стержневую обмотку выполняют
с а2 = 2. Соединение ветвей такой обмотки показано на рис. 4.21, б.
Соединение катушек двух других фаз выполняют аналогично.
1 обход
2 обход
а)
y2З
y2П
y2ЗУ
19 21 23 1 3 5 7 9 11 13 15 17
20 22 24 2 4 6 8 10 12 14 16 18
1в
20н
19н
б)
19н
2в
K1
2в
1н
K1
K2
1н
K2
8в
8н 14в
M1
L1
А(K
в)
Y(L)
С(M)
24 13
23 12 1 14 )
2
11
22 10
3 15
9
4 16
21
8
5
7
6
20
17
19 18
8в
X(K)
Z(M)
В(L)
Рис. 4.21. Схема одной фазы (а, б) и звезда (в) катушечных ЭДС
двухслойной стержневой волновой обмотки фазного ротора: z2 = 24;
2p = 4; q2 = 2; y2П = y2З = τ = 6; α = 30°; a2 = 1 (рис. а); a2 = 2 (рис. б)
85
б)
б)
б)
б)
б)
б)
б)
б) б) б) 26 б) б) б) б) б) б) б) б) б) б) б)
б) б) б)2526 б) б) б) б) б) б) б) б) б) б) б)
25
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б)
б) б) б) б) б)
б)
б)
б) б)
б)б)
б)б)
б) б)
б)
б)
б)
б) б) б)б) б)
б) б) б) б)
б)
б)
б)
Рис. 4.22. Схема одной фазы (а)
и звезда (б) катушечных ЭДС
двухслойной стержневой волновой обмотки фазного ротора:
1
z2 = 30; 2p = 4; q2 = 2 /2; y2П = 8;
y2З = 7; α = 24°; a2 = 1
Чтобы выводные концы и соединительные перемычки не нарушали балансировку ротора, начала фаз размещают симметрично на
1
расстоянии /3 окружности ротора или через 2p2q2 пазовых делений.
На рис. 4.21, а показаны только выводы L1 и M1 начала второй и
третьей фаз. При числе полюсов р равном или кратном трем фаз1
ные зоны, находящиеся на расстоянии /3 окружности ротора, принадлежат одной фазе и симметричное размещение выводов и перемычек невозможно.
При дробном числе пазов на полюс и фазу q2 полюсное деление τ = 3q2 не будет целым числом. Передний шаг обмотки y2П целое число и не может быть принят равным дробному τ. Поэтому
обмотку с диаметральным шагом выполнить невозможно и шаги
y2П , y2З не равны.
Обычно при знаменателе дробности d = 2 передний шаг обмотки принимают удлиненным:
у2 П 3q2 1 2 ,
(4.27)
86
а задний шаг – укороченным
y 2 З y2 П 1 .
(4.28)
Соединение катушек волновой стержневой обмотки с дробным q2 (рис. 4.22) выполняют также, как и у обмоток с целым q2.
Фаза обмотки состоит из двух ветвей, изображенных на рис. 4.22,а
линиями разной толщины. Одна ветвь образована последовательным
соединением всех катушек фазной зоны А (рис. 4.22, б) за (q2 + 0,5)
обходов, другая – соединением катушек фазной зоны Х за (q2 – 0,5)
обходов. В первую ветвь включено р(q2 + 0,5) катушек, во вторую
р(q2 – 0,5) катушек, вследствие чего ветви обмотки нельзя соединить
параллельно и при дробном q2 число параллельных ветвей a2 = 1.
4.4.3. Обмотки короткозамкнутых роторов
Обмотки короткозамкнутых роторов выполняют заливкой пазов
сердечника ротора алюминием марок А5, А7 (ГОСТ 11069-74). Одновременно отливают короткозамыкающие кольца с вентиляционными
лопатками (рис. 4.23). Число вентиляционных лопаток следует ориентировочно принять по табл. 4.16, а примерные средние размеры
определить по приведенным ниже формулам:
длина (осевой размер) лопатки, мм,
lЛ 2 K Lh ;
(4.29)
ширина (радиальный размер) лопатки, мм, при высоте оси вращения h ≤ 160 мм
hЛ 2 K H h ,
(4.30)
при h > 160 мм
hЛ 2 AH BH h ;
(4.31)
толщина (тангенциальный размер), мм, у вершины лопатки
в основании
Л 2 1,5 0,01h ,
(4.32)
Л 2ОС Л 2 KЛ 2 (l Л 2 bКЛ ) ,
(4.33)
где KδЛ2 ≈ 0,14 при h ≤ 132 и KδЛ2 ≈ 0,1 при h ≥ 160 мм.
В формулах (4.29)–(4.32) высота оси вращения h, мм; ширина короткозамыкающего кольца bКЛ, мм, определяется по формуле (7.40);
коэффициенты KL, KH, AH, BН приведены в табл. 4.17.
87
Размеры lЛ2 и hЛ2 могут быть изменены в процессе расчета и
конструирования машины, так как hЛ2 зависит от размеров короткозамыкающего кольца, а lЛ2 – от длины станины и глубины щитов.
Между вентиляционными лопатками роторов двигателей с
h ≤ 100 мм отливают кольцевые канавки (рис. 4.23, а) размером примерно 55 мм для размещения в них балансировочных грузов, которые крепят зачеканкой краев канавок. При малом осевом размере
короткозамыкающего кольца между вентиляционными лопатками
могут быть отлиты приливы, подобные штырям на рис. 4.23, б.
Приливы сошлифовывают при балансировке. На короткозамыкающих кольцах роторов машин с h > 100 мм между вентиляционными
лопатками отливают один (рис. 4.23, б) или два штыря овального
или круглого сечения диаметром 5–10 мм.
Таблица 4.16
Рекомендуемое число вентиляционных лопаток ротора
Число лопаток при числе полюсов
h, мм
45 – 63
71 – 100
112 – 160
180
200 – 250
280; 315
355
2р = 2
6
7
9
10
12
17
19
2р = 4; 6
6
9
11
12
14
22
22
lЛ 2
lЛ 2
3°
3°
1
3
bКЛ 3°
2
bКЛ
6°
δЛ2ОС
R5
R3
δЛ 2
8°
б)
6°
2р = 10; 12
—
—
—
—
—
22
22
Таблица 4.17
Значения коэффициентов
в формулах (4.29)–(4.33)
1
4
h Л2
2р = 8
—
9
11
12
14
22
22
hЛ2
2
δЛ2
Коэф- Значениe коэффициенфици- та при числе полюсов
ент 2р = 2 2р = 4 2р = 6–12
KL
KH
AH
BH
0,325 0,31
0,145 0,17
21
15
0,03 0,08
0,28
0,19
13
0,11
б)
Рис. 4.23. Торцевая часть короткозамкнутой обмотки ротора, залитой алюминием, двигателей с h ≤ 132 мм (а), с h = 160–355 мм (б):
1 – короткозамыкающее кольцо; 2 – вентиляционная лопатка; 3, 4 – канавка (при h ≤ 100 мм) и штырь для крепления балансировочных грузов
88
Выполненные в виде стальных шайб или пластин с отверстиями балансировочные грузы надевают на штыри и крепят расклепыванием концов штырей.
4.5. Валы роторов
5
9
d3
8
6
d1
4
2
3
hК
1 2
d2
d1
А
б)
d3
d2
d1
0,3
Валы роторов обычно изготавливают из углеродистой стали
марки 45 (ГОСТ 1050-74) в виде тел вращения со ступенчато изменяющимся диаметром (рис. 4.24). Число ступеней определяется необходимостью размещения сердечника, подшипников, вентиляторов,
контактных колец и других узлов машины. Диаметры основных посадочных поверхностей: выступающего конца d1, шеек под подшипники d2, утолщенной средней части d3 вала (рис. 4.24) можно выбрать по табл. 4.18 в зависимости от высоты оси вращения h.
I
а)
A–A
Увеличено
Повернуто
R
I
А
bШП
45°
5
hШП
dВШ
8
45°
2
3 7 45°
55°±10° C
C–C
dЦ0
d3
в)
45°
hБ
1 2
9
3 7
C
2
8
4
Рис. 4.24. Валы роторов двигателей с h ≤ 250 мм (а), с h > 250 мм (б):
1 – выступающий (свободный) конец вала; 2 – шейка вала под посадку
подшипников; 3 – средняя часть под посадку сердечника; 4 – хвостовик
для установки вентилятора или контактных колец; 5, 9 – шпоночные пазы; 6 – буртик; 7, 8 – канавки для кольцевых шпонок и стопорных колец
89
Таблица 4.18
К выбору размеров вала ротора
Диаметры вала (рис. 4.24)
Высота оси
d1, мм
d2, мм
d3, мм
вращения
2р = 2
2р = 4–12 2р любое
2р = 2
2р = 4–12
h, мм
56
11
11
12
17
17
63
14
14
15
20
20
71
19
19
20
27
27
80
22
22
25
32
32
90
24
24
25
32
32
100
28
28
30
37
37
112
32
32
35
43
43
132
38
38
45
54
54
160
42
48
50
60
60
180
48
55
60
70
70
200
55
60
65
75
75
225
55
65
70
80
80
250
65
75
85
100
100
280
70
80
85
110
120
315
75
90
95
110(140*) 120(140*)
355
85
100
110
130(140*) 140(150*)
* Для двигателей со степенью защиты IP23.
Для уменьшения концентрации механических напряжений в
месте перехода от одной ступени к другой диаметры ступеней должны отличаться не более чем в 1,35 раза. С той же целью в месте
перехода от одного диаметра к другому делают закругления (галтели) радиусом R, составляющим примерно (0,015–0,02) от диаметра
средней части вала d3 (рис. 4.24, а). Дополнительно в местах изменения диаметра протачивают кольцевые канавки глубиной от 0,2 до
0,5 мм и шириной от 3–5 до 10–15 мм. Большие размеры соответствуют более мощным двигателям.
У двигателей с короткозамкнутым ротором и высотой оси вращения h ≤ 250 мм валы выполняют из прокатанного цилиндрического прутка с минимальными переходами между ступенями, что снижает трудоемкость механической обработки и уменьшает отходы.
Среднюю часть вала 3 (рис. 4.24, а) под горячую посадку сердечника ротора выполняют гладкой. На выступающем конце вала 1 фрезеруют шпоночный паз 5. Размеры шпонки можно ориентировочно
определить по табл. 4.19 в зависимости от диаметра конца вала d1.
90
Таблица 4.19
К выбору размеров шпонок и шпоночных пазов, мм (рис. 4.24, а)
d1 11 14 19 22 24 28 32 38 42 48 55 60 65 70 75 80 85 90 100
hШП 4 5 6 6 7 7 8 8 8 9 10 11 11 12 12 14 14 14 16
bШП 4 5 6 6 8 8 10 10 12 14 16 18 18 20 20 22 22 25 28
dВШ 12,5 16 21,5 24,5 27 31 35 41 45 51,5 59 64 69 74,5 79,5 85 90 95 106
В двигателях с h > 250 мм сердечник ротора фиксируют на валу шпонкой от проворачивания. В средней части вала предусмотрен
шпоночный паз 9 (рис. 4.24, б) с такими же шириной и глубиной,
как и шпоночный паз 5 на свободном конце вала.
Для предотвращения осевого смещения сердечника на валу выполнют буртик 6 высотой hБ = (0,025–0,035)d3 и кольцевую шпоночную канавку 7 глубиной hК = (0,015–0,025)d3. Осевой размер буртиков и канавок может быть принят равным (0,08–0,12)d3. Также на
валу могут быть проточены кольцевые канавки 8 меньших размеров
для стопорных колец или кольцевых шпонок, фиксирующих вентиляторы, внутренние кольца подшипников и другие детали ротора.
В валах фазных роторов двигателей со степенью защиты IP23
сверлят центральное отверстие диаметром dЦО ≈ (0,3–0,35)d3 и три
наклонных отверстия диаметром (0,15–0,2)d3 (рис. 4.24, в) для размещения отводов от обмотки ротора к контактным кольцам, установленным консольно на хвостовике вала 4 за подшипниковым щитом.
4.6. Подшипниковые щиты и подшипники
В двигателях общего назначения подшипниковые щиты предназначены для защиты лобовых частей обмоток и установки подшипников, служащих опорами для вала ротора. Щиты двигателей с
высотой оси вращения h < 71 мм отливают из алюминиевых сплавов,
при h ≥ 71 мм выполняют литыми из чугуна или сварными из стали тех же марок, что применяют для изготовления станин. Обычно
оба щита делают одинаковыми.
Толщина стенки щита переменная и в месте соединения щита
со станиной должна быть не меньше толщины стенки станины ΔСТ .
Щиты двигателей с высотой оси вращения h ≤ 250 мм выполняют с
внутренней замковой поверхностью, для чего на внешнем диаметре
торцевой части щита сделан наружный кольцевой буртик, надеваемый на внешнюю кольцевую заточку торцевой поверхности стани-
91
ны (рис. 3.1–3.4). При высотах оси вращения h > 250 мм замковые
поверхности щитов наружные и кольцевой буртик на внутреннем
диаметре торцевой части щита входит во внутреннюю кольцевую
заточку станины (рис. 3.5, 3.6, 3.9).
Для увеличения жесткости щиты машин со степенью защиты
IP44, IP54 выполняют с минимально возможной глубиной (осевым
размером). У двигателей серии АИ глубина щита составляет примерно 1/8 от внешнего диаметра щита DЩ ≈ DСТ. Щиты круглые с
гладкой наружной поверхностью (конусность 15 %).
Щиты двигателей с высотами оси вращения 200–250 мм отливают с ребрами 24 (рис. 3.4) на внутренней поверхности для лучшего отвода тепла от лобовых частей обмотки статора. К ребрам 24
щитов крепят воздухонаправляющие щитки – диффузоры 25, выполненные в виде воронок из тонколистовой стали (рис. 3.4). Расстояние от торца диффузора до торцов вентиляционных лопаток ротора
должно быть минимальным и составляет 5–7 мм.
Для крепления щитов к станине предусмотрены равномерно
расположенные по наружному диаметру щитов приливы (три при
h ≤ 112 мм, четыре при 132 ≤ h ≤ 180 мм, шесть при h > 200 мм) со
сквозными отверстиями для крепежных болтов. Аналогично выполнены щиты двигателей серии 4А со степенью защиты IP44.
Подшипниковые щиты двигателей серии 4А со степенью защиты IP23 с высотами оси вращения 160–250 мм отливают из чугуна
в виде ступицы и обода, соединенных между собой шестью
ребрами Т-образного сечения (рис. 3.8). Между спицами образуются
окна для входа охлаждающего воздуха, закрытые обеспечивающими
степень защиты IP23 жалюзи. Жалюзи отливают из алюминиевого
сплава и крепят к щитам болтами. Для крепления щитов
предусмотрены шесть приливов с отверстиями.
У машин серии АИ со степенью защиты IP23 и литыми чугунными станинами подшипниковые щиты отливают из чугуна. Форма
шитов четырехгранная со скругленными гранями (рис. 3.9). Входные
отверстия для воздуха расположены на торцах щитов и закрыты
отливаемыми заодно со щитом жалюзи. Форма отверстий обеспечивает равномерное распределение воздушного потока и направление
его внутрь двигателя. Щиты крепятся к станине четырьмя болтами.
У двигателей со сварными станинами (степень защиты IP23,
h = 280–355 мм) подшипниковые щиты сварные из стали или литые
из чугуна (рис. 3.10). Щиты плоские в осевом направлении, круглые
и конструктивно подобны щитам машин серии 4А со степенью за-
92
защиты IP23 и высотой оси вращения 160–250 мм. Подшипниковые
щиты устанавливают на кольцевые заточки 4 торцевых стоек 1 полустанины (рис. 4.4) и крепят к стойкам четырьмя болтами 21
(рис. 3.10). К верхней части щитов крепят болтами стойки (рамы) 8
для установки кожуха 10 (рис. 3.10), закрывающего двигатель сверху.
С внутренней стороны щитов двигателей со степенью защиты IP23 крепят воздухонаправляющие щитки (диффузоры) из тонколистовой стали.
В центральной части щита есть втулка с отверстием для установки радиальных однорядных шариковых или роликовых подшипников качения (рис. 4.26), служащих опорами вала ротора.
Как правило, одна подшипниковая опора со стороны выступающего конца вала “плавающая”, вторая – “фиксирующая”. Установленный в “фиксирующей” опоре подшипник несет осевую и радиальную нагрузки. Поэтому оба кольца подшипника жестко зафиксированы от осевых перемещений.
Подшипник в “плавающей” опоре воспринимает только радиальную нагрузку и должен иметь возможность свободного перемещения в осевом направлении, чтобы исключить заклинивание при
сборке и вследствие теплового расширения при работе двигателя.
С этой целью в “плавающей” опоре с шариковым подшипником
предусматривают осевые зазоры между подшипниковыми крышками
и наружной обоймой (наружным кольцом). Также в “плавающей”
опоре устанавливают роликовые подшипники с гладким внутренним
или наружным кольцом (рис. 4.26, б), что делает возможным осевое
перемещение одного кольца подшипника относительно другого.
Подшипниковый узел состоит из подшипника; подшипниковых
крышек, закрывающих подшипник с одной или двух сторон; уплотнений; фиксирующих деталей – шайб, стопорных колец.
В двигателях основного исполнения с высотами оси вращения
45–132 мм в обеих опорах установлены шарикоподшипники с двусторонним уплотнением и постоянно заложенной, рассчитанной на
весь срок службы консистентной смазкой. Применены подшипники
типа: 180000 для двигателей 4А, 2RS легкой (при h = 45–100 мм) и
средней (при h = 112–132 мм) серий для машин АИР.
Конструкция подшипникового узла упрощена за счет отказа от
внутренней подшипниковой крышки и уплотняющих устройств
(рис. 4.25, а). Наружная подшипниковая крышка отлита заодно с
подшипниковым щитом.
В двигателях серии 4А с высотами оси вращения 160–355 мм
93
применены подшипники средней серии: роликовые типа 2300 с более нагруженной стороны приводимого во вращение механизма и
шариковые типа 300 с противоположной стороны (рис. 3.3–3.10).
Исключение составляют двухполюсные машины с шарикоподшипниками в обеих опорах. Подшипники закрыты съемными подшипниковыми крышками 5, 6 из чугуна (рис. 4.25, б), предназначенными
для удержания смазки и защиты подшипника от воздействия окружающей среды. Подшипниковые крышки “плавающих” опор, не несущие осевой нагрузки, могут быть выполнены из алюминиевого
сплава или термостойкой пластмассы.
В двигателях основного исполнения применена самая простая
конструкция щелевого (бесконтактного) уплотнения.
1
13
2
1
4
3
1
13
6
5
10
6
а)
1
7
12
11
7
12
в)
2
5
8
9
15
6
7
7
5
14 г)
б)
Рис. 4.25. Подшипниковые узлы с шарикоподшипниками с
двусторонним уплотнением (а); с внутренней и наружной
крышками (б); с устройствами для пополнения смазки (в, г):
1 – подшипниковый шит; 2 – подшипник; 3 – внутреннее уплотнение подшипника; 4 – пружина волнистая; 5 – наружная подшипниковая крышка;
6 – внутренняя подшипниковая крышка; 7 – кольцевые канавки; 8 – шайба;
9 – войлочное уплотнение наружной крышки; 10 – пробка; 11 – кольцо уплотнения; 12 – стопорное кольцо; 13 – масленка; 14 – пробка спускного
канала; 15 – войлочное уплотнение внутренней крышки подшипника
качения: шариковый (а);
роликовый (б)
D
d ( d2 )
D
d ( d2 )
94
Уплотняющее действие зазора между валом и подшипниковой
крышкой усилено двумя кольцевыми канавками 7 прямоугольного
сечения в крышке (рис. 4.25, б). Канавки при сборке заполняют
смазкой.
В машинах специализированных по условиям окружающей среды исполнений применяют комбинированные контактные уплотнения в виде войлочных колец 9 и 15, усиленных лабиринтом в наружной крышке и кольцевыми канавками на внутренней (рис. 4.25, г).
Подшипниковые узлы машин серии АИ с h = 250–355 мм выполнены, как и у двигателей серии 4А, соответствующих высот оси
вращения. В двигателях АИР с h = 160–180 мм в обеих опорах установлены шариковые подшипники типа 2RS средней серии с двусторонним уплотнением и постоянно заложенной смазкой. Подшипниковые узлы со стороны механизма выполнены с одной наружной
крышкой, с противоположной стороны – с двумя крышками, зажимающими подшипник. В подшипниковых узлах двигателей АИР с
высотами оси вращения 200 и 225 мм применены шариковые подшипники средней серии со стороны механизма и легкой серии со
стороны вентилятора. Подшипники закрыты двумя крышками.
С целью уменьшения вибраций и шумов, обусловленных наличием зазоров между шариками и обоймами шарикоподшипников,
применяют осевое нажатие на наружную обойму подшипника, для
чего устанавливают пружинящие шайбы 4 (рис. 4.25, а) в виде
штампованного из стальной ленты толщиной 0,4–0,5 мм волнистого
кольца. При этом обеспечивается постоянное касание с определенным усилием шариков и дорожек качения на обоймах подшипника.
Пружины осевого нажатия
б)
а)
устанавливают обычно в “фиксирующей” опоре. При примеr
нении шарикоподшипников в
r
обеих опорах пружинящие шайбы устанавливают в двух подшипниковых узлах.
В двигателях серии 4А с
h ≥ 132 мм и серии АИ с
B
h ≥ 200 мм могут быть предусмотрены
устройства
для
B
пополнения и частичной замены смазки без разборки машиРис. 4.26. Подшипники
ны (рис. 4.25, в, г).
95
Свежая смазка подается под давлением от масленки 13 по
трубке маслопровода под внутреннюю крышку 6 подшипника. Отработанная смазка сбрасывается в выдвижной или съемный контейнер либо резервуар в нижней части щита, из которого удаляется в
процессе эксплуатации. Такие устройства предусмотрены для всех
специализированных по условиям окружающей среды двигателей, а
также если при эксплуатации доступ к двигателю для его разборки
и обслуживания затруднен.
Подшипники качения выбирают по каталогам и справочникам
из условия обеспечения расчетного срока службы при заданных нагрузке на валу и частоте вращения /4, 6/. При учебном проектировании размеры и тип подшипника следует выбрать из табл. 4.20–4.23
по принятому в параграфе 4.5 диаметру цапфы вала d2, после чего
можно определить диаметр отверстия во втулке и примерную длину (осевой размер) втулки подшипникового щита.
Таблица 4.20
Подшипники радиальные с короткими цилиндрическими роликами
(средняя узкая серия)
Условное обозначение подшипника
2308
2309
2310
2311
2312
2313
2314
2315
2316
2317
2318
2319
2320
2322
Размеры по рис. 4.26, б
d, мм
D, мм
В, мм
r, мм
40
45
50
55
60
65
70
75
80
85
90
95
100
110
90
100
110
120
130
140
150
160
170
180
190
200
215
240
23
25
27
29
31
33
35
37
39
41
43
45
47
50
2,5
2,5
3,0
3,0
3,5
3,5
3,5
3,5
3,5
4,0
4,0
4,0
4,0
4,0
n, об/мин
6300
6300
5000
5000
4000
4000
4000
3150
3150
3150
2500
2500
2500
2000
96
Таблица 4.21
Подшипники шариковые радиальные однорядные с двумя уплотнениями
Условное обозначение подшипника
180500
180501
180502
180503
180504
180505
180506
180508
180509
180602
180603
Размеры по рис. 4.26, а
d, мм
D, мм
В, мм
r, мм
10
12
15
17
20
25
30
40
45
15
17
30
32
35
40
47
52
62
80
85
42
47
14
14
14
16
18
18
20
23
23
17
19
1,0
1,0
1,0
1,0
1,5
1,5
1,5
2,0
2,0
1,5
1,5
n, об/мин
8000
8000
6300
6300
5000
4000
4000
3150
3150
8000
8000
Таблица 4.22
Подшипники шариковые радиальные однорядные (легкая серия)
Условное обозначение подшипника
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
Размеры по рис. 4.26, а
d, мм
D, мм
В, мм
r, мм
10
12
15
17
20
25
30
35
40
45
50
55
60
65
70
75
30
32
35
40
47
52
62
72
80
85
90
100
110
120
125
130
9
10
11
12
14
15
16
17
18
19
20
21
22
23
24
25
1,0
1,0
1,0
1,0
1,5
1,5
1,5
2,0
2,0
2,0
2,0
2,5
2,5
2,5
2,5
2,5
n, об/мин
20000
20000
16000
16000
12500
10000
10000
8000
6300
6300
6300
5000
5000
5000
4000
4000
97
Таблица 4.23
Подшипники шариковые радиальные однорядные (средняя серия)
Условное обознаРазмеры по рис. 4.26, а
n, об/мин
чение подшипника d, мм
D, мм
В, мм
r, мм
308
40
90
23
2,5
6300
309
45
100
25
2,5
6300
310
50
110
27
3,0
5000
311
55
120
29
3,0
5000
312
60
130
31
3,5
4000
313
65
140
33
3,5
4000
314
70
150
35
3,5
4000
315
75
160
37
3,5
3150
316
80
170
39
3,5
3150
317
85
180
41
4,0
3150
318
90
190
43
4,0
3150
319
95
200
45
4,0
2500
320
100
215
47
4,0
2500
321
105
225
49
4,0
2500
322
110
240
50
4,0
2500
4.7. Вентиляционные узлы
Вентиляционные узлы двигателей со степенью защиты IP44, IP54
размещены на стороне, противоположной приводимому во вращение
механизму, и состоят из наружного вентилятора и защитного кожуха
для направления потока воздуха и
22
обеспечения необходимой степе4
ни защиты вентилятора (IP20).
1
Реверсивный вентилятор со4
стоит из несущего диска 1 с цен3
тральной втулкой для крепления
на валу и прямых радиальных лопаток 2 (рис. 4.27). Вентиляторы
3
двигателей с h ≤ 132 мм изготавливают из прочной термостойкой
1
пластмассы (рис. 3.2). Нагретый в
2
кипящей воде вентилятор насажиРис. 4.27. Вентилятор двигателя с
вают на рифленый вал. Вентиляh = 80 мм из алюминиевого сплава:
тор может быть заперт от осево1 – несущий диск; 2 – лопатка; 3 –
го смещения пружинной шайбой.
втулка; 4 – винт или болт с гайкой
98
При h = 71–132 мм допустимо применение вентиляторов из алюминиевого сплава АЛ9В. Во втулке есть центральный разрез, стягиваемый болтом с гайкой для фиксации вентилятора на валу (рис. 4.27).
Вентиляторы двигателей с h ≥ 160 мм также выполняют из сплава
АЛ9В с залитой стальной втулкой, насаживают на вал со шпонкой
и фиксируют от осевого смещения стопорным кольцом (рис. 3.3–3.7).
У большинства двигателей кожух штампованный или штампованно-сварной из листовой стали толщиной 1–2 мм. В двигателях с
h ≤ 132 мм возможно применение кожухов из пластмассы. Кожух
крепят винтами 14 (рис. 3.1) к приливам подшипникового щита. Для
уменьшения вибраций кожуха и шумов в одной или во всех точках
крепления могут устанавливаться резиновые прокладки (рис. 3.2).
На рис. 4.28 изображены схемы наиболее часто применяемых
вентиляционных узлов. Число лопаток NЛОП вентилятора и основные
размеры вентиляционного узла можно ориентировочно выбрать по
табл. 4.24 в зависимости от числа полюсов и высоты оси вращения.
Другие, остающиеся примерно постоянными размеры вентиляторов машин с h ≤ 250 мм (обозначения по рис. 4.28):
– внутренний диаметр вертикального участка лопатки D /ВЕН ≈ DД ;
– угол наклона конической части несущего диска α1 ≈ 25°;
– углы скоса лопаток вентилятора α3 ≈ 30–35°, α4 = 45° (α4 ≈ 30° при
h = 225–250 мм), α5 = 45° при h ≤ 132 мм и α5 ≈ 50° при h = 160–250 мм.
Размеры скошенных или скругленных частей лопаток: a1 = 0
при h ≤ 100 мм и a1 ≈ 0,12h при h ≤ 100 мм; a2 ≈ 0,1h.
LКОЖ
LКОЖ
bВЕН
bВЕН
a3 a1
a3
δКОЖ
α3
5
DВЕН
DСЕТ
δСЕТ
α2
DСЕТ
DД
α2
D/ВЕН
DКВН
δСЕТ
a2
α R
DД
a2
α1
hр
DКВН
α4
DВЕН
hр
a) 2p ≥ 4
б) 2p = 2
Рис. 4.28. Схемы вентиляционных узлов двигателей со степенью
защиты IP44, IP54 при числе полюсов машины: 2р ≥ 4 (а); 2р = 2 (б)
99
Таблица 4.24
Основные размеры вентиляторов двигателей со степенью
защиты IP44, IP54 (обозначения размеров по рис. 4.28)
h, мм
2р
71–80
2 10 (5*) (1,7–1,8)h
≥4
NЛОП
DВЕН
δСЕТ,
δКОЖ,
мм
α2
1,4h
6
5
10°
bВЕН
DД
0,44h
мм
2
90–100 ≥ 4 10 (5*)
1,6h
1,8h
0,44h
1,1h
1,4h
6
6
10°
112,132
2
≥4
5
8
(1,6–1,7)h
1,8h
0,44h
1,3h
1,4h
8
6
15°
160–200
2
≥4
5
8–9
1,6h
1,8h
1,1h
1,4h
10
7
225–250
2
≥4
5
8–9
1,6h
1,8h
1,1h
1,4h
12
10
(0,35–0,4)h 1,4h ≥12
2
1,6h
6
0,44h
≥4
1,8h
1,7h
9
* Двигатели АИ с вентиляторами из пластмассы.
≥15
280–355
(0,35–0,4)h
0,44h
(0,35–0,4)h
0,44h
10–15°
20–25°
10–15°
30°
45°
Для снижения вентиляционного шума толщина (тангенциальный
размер) лопатки δЛОП должна быть минимальной. По условиям прочности и технологии изготовления толщина лопаток не может быть
менее 2,5 мм. Обычно δЛОП ≈ 2,5–3 мм в машинах с h ≤ 100 мм и
увеличивается в машинах с большей высотой оси вращения.
Форма кожуха повторяет очертание ребер станины. Внутренний диаметр кожуха DКВН у двигателей серии 4А примерно равен
диаметру станины по вершинам ребер DСТР. У машин серии АИ
высота ребер станины в месте установки кожуха уменьшена. Внешний диаметр кожуха DКН равен или несколько меньше диаметра
станины по вершинам ребер DСТР.
Для уменьшения вентиляционного шума рекомендуется выбирать внешний диаметр вентилятора DВЕН и внутренний диаметр кожуха DКВН так, чтобы разница (DКВН – DВЕН ) была не менее 0,1DВЕН.
Осевая длина кожуха LКОЖ составляет (0,8–1,1)h. Глубина кожуха (занятая вентилятором часть кожуха) LКВ ≈ 0,5h. Расстояние от
точки крепления до торца цилиндрической части кожуха a3 ≈ 1,5hР,
где hР – высота ребра, найденная в параграфе 4.1.
100
а)
б)
в)
Рис. 4.29. Фрагменты кожухов вентиляторов асинхронных двигателей со степенью защиты IP44, IP54 серии 4А: с h = 71–132 мм (а),
с h ≥ 132 мм (б); серии АИ (в)
Переход от цилиндрической части кожуха к торцевой части с
меньшим диаметром (рис. 3.1–3.7) выполняют коническим или скругленным по радиусу R ≈ (0,7–0,8)h.
На торце кожуха есть отверстия для входа воздуха. У машин
серии 4А отверстия имеют вид радиальных клиновидных прорезей
шириной не более 12 мм, размещенных в один (h ≤ 132 мм) или
два (h ≥ 160 мм) ряда (рис. 4.29). У двигателей серии АИ приняты
отверстия прямоугольной формы с размерами не более 8 × 8 мм.
Диаметр сетки, образованной отверстиями и перегородками между
отверстиями, DСЕТ ≈ (1,5–1,65)h.
В нижней части кожух уплощен. Расстояние от плоской нижней части кожуха до опорной плоскости лап должно быть не менее половины найденного в параграфе 4.1 расстояния h2 от нижней точки станины до опорной плоскости лап.
4.8. Вводные устройства
Вводные устройства предназначены для присоединения к двигателю проводов, проложенных в гибком металлорукаве, или кабелей с оболочкой из резины или пластика.
У двигателей с литыми станинами вводное устройство размещают на станине сверху и чаще всего со стороны свободного конца вала (рис. 3.1–3.4). У машин серии 4А с высотой оси вращения
h ≥ 280 мм при любом исполнении станины и серии АИ со сварными станинами вводное устройство размещают на боку станины
справа, если смотреть на двигатель со стороны выступающего конца вала (рис. 3.5, 3.10, 3.13).
101
2
6
6
1 11
11
13
5
7
4
10 12
12
13
13
9 4
7
10
13
9
Рис. 4.30. Вводное устройство двидвигателя АИР80 с горизонтальновертикальным оребрением станины:
5
9
8
3
1 – стенка корпуса; 2 – крышка; 3 –
штуцер; 4 – панель; 5 – винт крепления панели; 6 – контактные шпильки;
7 – отводы обмотки статора; 8 – изолирующая трубка; 9 – отверстия в
станине; 10 – прилив корпуса с винтом заземления; 11 – резиновая прокладка; 12 – пробка; 13 – уплотнение
пробки и штуцера
У двигателей со степенью защиты IP44, IP54 с горизонтальновертикальным оребрением станины корпус вводного устройства отливается вместе со станиной. Форма корпуса прямоугольная с размерами:
высота
hКОР ≈ (0,5–0,55)h;
длина
lКОР ≈ 2,4hКОР;
ширина
bКОР ≈ (0,75–0,8)lКОР.
В корпусе (рис. 4.30) к приливу станины винтами 5 прикреплена панель 4 из изоляционного материала с установленными на ней
контактными шпильками 6. При высоте оси вращения h ≤ 100 мм
обычно устанавливают панель с тремя шпильками, по заказу может
быть установлена панель с шестью шпильками (рис. 4.31). Через отверстие 9 в станине выведены отводы 7 обмотки статора и присоединены к контактным шпилькам 6. К этим же шпилькам крепят
подводимые через штуцер 3 провода или жилы кабеля.
Вводные устройства с прилитым корпусом обычно выполняют
с одним штуцером. На противоположной штуцеру стенке корпуса
сделано отверстие, закрываемое резьбовой пробкой 12 с уплотнением, что позволяет установить штуцер на другой стороне корпуса и
102
обеспечить подвод проводов или кабеля с обеих сторон двигателя.
По периметру крышки вводного устройства сделан паз глубиной 1,5–2 мм и шириной 3,5–5 мм. В этот паз входят стенки корпуса при установке крышки (рис. 4.30). Для уплотнения в паз заложена резиновая прокладка 11 толщиной 1–1,5 мм.
Уплотнения крышки, штуцера и пробки обеспечивают требуемую степень защиты вводного устройства IP44, IP54.
У двигателей со степенью защиты IP23 и IP44, IP54 с радиальным оребрением станины вводные устройства съемные (рис. 4.31,
4.32). Корпус и крышку обычно отливают из алюминиевого сплава АЛ9 при высоте оси вращения h ≤ 250 мм; из чугуна при большей высоте оси вращения. В машинах со сварным корпусом и степенью защиты IP23 возможна комбинация корпуса вводного устройства из чугуна и крышки из пластмассы (серия АИ). Допустимо
применение пластмассовых корпусов и крышек вводных устройств
двигателей с h ≤ 100 мм.
11
7
12
6
4 5
9
1
3
14
1
2
2
8
15
15 14
10
13
13
8
16
17
5
Рис. 4.31. Вводное устройство двигателя 4АА80 с радиальным оребрением станины: 1 – корпус; 2 – патрубок;
6
15
5
14
9
3 – штуцер; 4 – панель; 5 – винт крепления панели; 6 – контактные шпильки;
7 – отводы обмотки статора; 8 – изолирующая трубка; 9 – болт заземления;
10 – резиновая прокладка; 11 – крышка;
12 – резиновое уплотнение; 13 – отверстие в станине; 14 – винт крепления корпуса к патрубку; 15 – винт крепления
патрубка к станине; 16 – площадка станины; 17 – отверстие в патрубке
103
На рис. 4.31 изображена конструкция устанавливаемого на верху станины съемного вводного устройства двигателей с h = 71–90 мм.
Корпус 1 крепят винтами 14 к приливам соединительного патрубка 2,
который, в свою очередь, крепится винтами 15 к площадке станины 16. На патрубке винтами 5 закреплена панель 4 с контактными
шпильками 6 для присоединения отводов обмотки статора и проводов сети. Соединение патрубка с корпусом и станиной уплотнено
резиновыми прокладками 10 толщиной 1,5–2 мм.
У двигателей с h ≤ 132 мм патрубок отливают со сквозным
отверстием 17 для прохода верхней шпильки 6 (рис. 3.1) при
h = 71–90 мм или утолщенного ребра станины, используемых для
соединения подшипниковых щитов со станиной.
Вводные устройства машин с h = 100–132 мм конструктивно
подобны и отличаются размерами и способом соединения деталей.
Патрубок выполняют в виде открытой сверху пустотелой коробки с
толщиной стенки 2,5–4 мм, которая крепится к площадке станины
четырьмя винтами, расположенными попарно по обеим сторонам
прилива, образующего сквозное отверстие 17 (рис. 4.31). Корпус крепят четырьмя винтами к приливам, отлитым в углах патрубка.
Верхняя резиновая прокладка 10 между корпусом и патрубком отсутствует.
Одна из применяемых конструкций вводных устройств машин
с h = 160–250 мм показана на рис. 4.32.
Для удобства подвода кабеля или провода конструкция съемных вводных устройств допускает разворот корпуса через 90° в машинах с h ≤ 100 мм и на 180° при большей высоте оси вращения.
Для поворота корпуса достаточно вывернуть винты крепления корпуса к патрубку. Панель с прикрепленными к контактным шпилькам выводными концами обмотки статора остается неподвижной.
В крышке вводного устройства выполнен паз для уплотнительной резиновой прокладки глубиной 2–4 мм и шириной 6 мм.
Размеры устанавливаемых на верху станины съемных вводных
устройств:
высота hВУ ≈ (0,48–0,56)h при h = 71–90 мм (большее значение
hВУ соответствует меньшей высоте оси вращения), hВУ ≈ (0,43–0,46)h
при h ≥ 110 мм;
длина
lВУ ≈ (2,2–2,45)hВУ при h ≤ 132 мм,
lВУ ≈ (2,6–3,2)hВУ при h ≥ 160 мм;
ширина
bВУ ≈ (0,87–0,93)lВУ при h ≤ 132 мм,
bВУ ≈ (0,6–0,65)lВУ при h ≥ 160 мм.
104
8
6
9
4
3 1
2
7
5
11
11
2
7
10
Рис. 4.32. Вводное устройство двигателей с
высотами оси вращения 160–250 мм:
1 – корпус; 2 – патрубок;
3 – штуцер; 4 – панель;
5 – винт крепления панели; 6 – шпильки контактные; 7 – отводы обмотки статора; 8 – крышка; 9 – резиновое уплотнение; 10 – винт крепления корпуса к патрубку;
11 – резиновая прокладка
Размещаемые на боку станины вводные устройства выполняют
без соединительного патрубка. Корпус вводного устройства крепят
непосредственно к специальному приливу литых станин (рис. 3.5)
или основанию для вводного устройства сварных станин (рис. 3.10).
4.9. Токосъемные устройства фазных роторов
У машин с фазным ротором со степенью защиты IP44, IP54
токосъемное устройство находится под оболочкой двигателя обычно
со стороны свободного конца вала (рис. 3.7). При высоте оси вращения h ≤ 180 мм возможна установка токосъемного устройства со
стороны вентилятора (двигатели 4АК).
Полость токосъемного устройства отделена от полости статора
перегородкой 15 (рис. 3.7) с лабиринтными уплотнениями, защищающими обмотки статора и ротора от щеточной пыли. Для замены
щеток в станине сделаны окна (отверстия), закрытые специальным
кожухом 17 со штуцером для вывода концов фаз обмотки ротора.
105
1
2
3
а)
1
4
б)
6
5
Рис. 4.33. Узел контактных
колец двигателей с высотой
оси вращения h ≤ 250 мм (а)
и высотами оси вращения
h = 280–355 мм (б): 1 – кольцо
контактное; 2 – лопатка вентиляционная; 3 – отверстие; 4 –
фланец; 5 – стяжная шпилька;
6 – дистанционная изолирующая втулка
В двигателях со степенью защиты IP23 токосъемное устройство расположено вне оболочки со стороны противоположной свободному концу вала (рис. 3.11–3.13).
Токосъемное устройство защищено литой из чугуна или сварной стальной коробкой 16 (рис. 3.11), которая крепится к фланцу
подшипникового щита 10. Коробка закрывается сварно-штампованным кожухом 14 из листовой стали. При снятии кожуха обеспечивается свободный доступ к щеточному аппарату 11 и контактным
кольцам 12. В кожухе или в коробке есть отверстия для охлаждающего воздуха, защищенные жалюзи 15.
Узел контактных колец двигателей с высотой оси вращения
h ≤ 250 мм (рис. 4.33, а) состоит из опрессованных пластмассой контактных колец 1. На торцах пластмассовой части каждого кольца
расположены вентиляционные лопатки 2, обеспечивающие засасывание охлаждающего воздуха через отверстия 3 в пространство между кольцами. При перемещении воздуха происходит охлаждение колец и удаление щеточной пыли с поверхности узла. Узел контактных колец может быть закреплен непосредственно на валу или на
106
промежуточной стальной втулке, насаживаемой на вал.
В двигателях со степенью защиты IP23 и высотами оси вращения h = 280–355 мм применена консольная конструкция узла контактных колец (рис. 4.33, б). Кольца разделены дистанционными втулками
из пластмассы 6 и крепятся тремя стяжными шпильками 5 к жестко закрепленному на валу несущему фланцу 4. Выводные концы
обмотки ротора проходят в центральном отверстии вала и крепятся
непосредственно к контактным кольцам 22 без дополнительных токоотводов (рис. 3.13).
Контактные кольца изготавливают из меди или бронзы. Вследствие дефицитности и высокой стоимости меди кольца крупных машин делают из стали Ст.5 или чугуна СЧ15-32.
Внешний диаметр контактных колец выбирают меньше внешнего диаметра подшипника, что позволяет снять подшипниковый
щит без съема контактных колец с вала. Ширину (осевой размер)
контактного кольца можно ориентировочно принять равной одному
из размеров (обычно меньшему) поперечного сечения щетки.
Щетки прессуют из угольных или графитовых порошков с добавлением меди. Для отвода тока в щетку заделан конец гибкого
токоведущего канатика из тонкой медной проволоки. Второй конец
канатика снабжен наконечником для присоединения к неподвижной
части щеткодержателя.
В асинхронных машинах с фазным ротором обычно используют металлографитные щетки марки МГ с допустимой плотностью
2
тока ΔЩ до 0,15–0,2 А/мм и электрографитированные щетки мар2
ки ЭГ с допустимой плотностью тока ΔЩ до 0,1–0,15 А/мм . По известному номинальному току фазы ротора I2Н можно определить
2
требуемое полное сечение щеток одной фазы, мм ,
S ЩП I 2 Н / Щ ,
(4.34)
2
где I2Н – фазный ток ротора, А; ΔЩ – плотность тока, А/мм .
Зная полное сечение щеток фазы, определяют число щеток на
одно контактное кольцо NЩ, сечение SЩ и размеры одной щетки
из условия SЩП = NЩ SЩ .
Размеры поперечного сечения щеток, мм, определяются рядом
чисел, любой член которого образован умножением на 1,25 предыдущего члена ряда: 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; 32; 40; 50.
Ширина щетки bЩ, мм, выбирается из приведенного ряда чисел в пределах от четырех до сорока. Длина щетки lЩ = (1,25–4)bЩ,
полученное значение lЩ, мм, следует заменить ближайшим числом
107
из приведенного выше ряда. При учебном проектировании можно
ориентировочно принять высоту щетки hЩ = (2,2–2,5)lЩ для щеток
длиной lЩ = 5–12,5 мм и hЩ = (1–2) lЩ при lЩ ≥ 16 мм. Полученное
значение hЩ, мм, заменить ближайшим числом из приведенного выше ряда.
Длину lЩ и ширину bЩ щетки следует выбирать близкими по
величине, размеры bЩ , lЩ не должны отличаться более чем вдвое.
Для направления и нажатия щеток на контактные кольца применяют щеткодержатели в основном радиального типа. У таких
щеткодержателей щетка направлена по радиусу контактного кольца
и может перемещаться в обойме щеткодержателя в радиальном направлении. Обойму щеткодержателя размещают так, что щетки устанавливаются длинной стороной lЩ по окружности контактного
кольца. Щеткодержатели укрепляют на щеточных пальцах, представляющих собой опрессованные пластмассой металлические стержни
круглого или прямоугольного сечения. Щеточные пальцы крепят к
фланцу подшипникового щита (рис. 3.11–3.13).
5. ГЛАВНЫЕ РАЗМЕРЫ ДВИГАТЕЛЯ
Главными размерами асинхронной машины называют внутренний диаметр D1 и расчетную длину lδ магнитопровода статора. Эти
размеры связаны с расчетной мощностью P / , электромагнитными нагрузками A и Bδ, угловой механической скоростью вращения магнитного поля Ω1 с помощью машинной постоянной Арнольда СА, характеризующей использование внутреннего объема статора на единицу расчетного момента:
C A D12l 1 P / 2 k B kO1 AB .
(5.1)
Из практики проектирования известны относительно малоизменяющиеся соотношения номинальной P2Н и расчетной P / мощностей
машины, значения электромагнитных нагрузок A и Bδ, обмоточного
коэффициента kO1 обмотки статора и характеризующих магнитное
поле машины коэффициентов αδ и kB. Задавая значения этих величин и угловую скорость Ω1, по формуле (5.1) можно определить
2
произведение D1 lδ. Используя известные из расчетной практики от2
ношения λ = lδ /τ (рис. 5.5), по найденному произведению D1 lδ можно найти главные размеры двигателя D1 и lδ. С внутренним диаметром непосредственно связан внешний диаметр DA сердечника стато-
108
ра, определяющий размеры активной части машины и массу статора.
Вследствие того что отношение λ = lδ /τ изменяется в определенных пределах, одна и та же машина может быть спроектирована
с разными размерами D1 , lδ и DA.
Все сказанное выше справедливо при отсутствии каких-либо
ограничений главных размеров. При проектировании нового двигателя на базе конструкций машин современных серий в качестве основного размера должна быть выбрана высота оси вращения h из
установленного государственным стандартом ряда. Выбранный конкретный размер h и особенности конструкции оболочки (станины)
двигателя ограничивают достаточно свободный выбор диаметров с
помощью машинной постоянной СА.
Поэтому в начале расчета главных размеров по заданным номинальной мощности P2Н, числу полюсов 2р и степени защиты следует выбрать из табл. 2.2–2.4 высоту оси вращения h. При проектировании двигателя с мощностью, отличающейся от приведенных в
табл. 2.2–2.4 значений, следует принять высоту оси вращения для
ближайшей номинальной мощности.
Максимально возможный внешний диаметр сердечника статора DAМАХ , мм, (рис. 5.1) допускаемый конструкцией и технологией
изготовления двигателя:
DAMAX 2 (h h 1MIN ) .
(5.2)
Здесь h – высота оси вращения, мм; h1MIN – минимально допустимое
расстояние от нижней точки наружной поверхности сердечника статора до опорной плоскости лап, мм, определяемое условиями крепления двигателя и защиты нижней части машины от случайных повреждений:
h1MIN СТ h2 ,
(5.3)
ΔCТ
где толщину стенки станины ΔСТ и размер h2 в миллиметрах следует найти
по формулам (4.1), (4.10) и рекомендациям параграфа 4.1.
DA
Кроме высоты оси вращения h
h2
h1
h
внешний диаметр статора DA зависит от
ряда других противоречивых факторов.
Для получения максимальной мощности
Рис. 5.1. К выбору внеш- него
при данной высоте оси вращения желадиаметра статора DA
тельно выбрать наибольшее значение DA.
109
Но при увеличении радиальных размеров машины со степенью
защиты IP44, IP54 возрастает расстояние между тепловыделяющими
элементами (зубцовая зона с обмотками) и теплоотдающей оребренной поверхностью станины.
Вследствие этого увеличивается нагрев машины и требуется
более нагревостойкая изоляция, усложняются системы охлаждения,
что повышает стоимость машины.
Для сохранения постоянной температуры активных частей машины с увеличением DA необходимо уменьшать электромагнитные
нагрузки A и Bδ, особенно при малом числе полюсов 2р. При этом
также увеличиваются габариты, масса и стоимость машины.
По технологическим и экономическим соображениям внешний
диаметр DA должен быть таким, чтобы были минимальны отходы
при штамповке листов статора из листовой или рулонной стали
стандартных размеров.
В табл. 5.1 приведены возможные, с учетом рассмотренных
выше факторов, границы значений внешнего диаметра DA сердечника статора. Для каждой высоты оси вращения h в табл. 5.1 большие
значения DA соответствуют минимуму отходов при штамповке,
меньшие – минимально возможным внешним диаметрам по результатам оптимизационных расчетов двигателей серии АИ. Значения DA
машин серии 4А находятся в указанных границах.
Таблица 5.1
Внешние диаметры сердечников статоров
h, мм
DA, мм
h, мм
DA, мм
h, мм
DA, мм
56
86 – 96
100
163 – 175
200
327 – 359
63
100 – 108
112
184 – 197
225
368 – 406
71
114 – 122
132
215 – 233
250
420 – 452
80
126 – 139
160
260 – 285
280
480 – 530
90
145 – 157
180
295 – 322
315 355
590 660
Внешний диаметр сердечника статора следует предварительно
выбрать по табл. 5.1, учитывая, что выбранный DA не должен быть
больше DAМАХ, найденного по формуле (5.2). В процессе расчета DA
может уточняться, но не должен превышать DAМАХ.
Так как в начале расчета размеры ярма и зубцов статора не
известны, внутренний диаметр сердечника статора D1, мм, определяют по выбранному внешнему диаметру DA приближенно
D 1 k D DA .
( 5.4 )
110
Значения коэффициента kD = D1/DA в зависимости от числа полюсов
машины 2р приведены в табл. 5.2.
Таблица 5.2
Отношение kD = D1/DA асинхронных двигателей
2р
kD
2
0,52 – 0,6
4
0,62 – 0,68
6
0,67 – 0,73
8
0,69 – 0,75
10 – 12
0,75 – 0,77
Далее определяют полюсное деление τ, м,
D 110 3 (2 p)
(5.5)
и расчетную мощность машины, В·А,
P / P2 Н k E 10 3 (Н Cos Н ) .
(5.6)
В формулах (5.5), (5.6) внутренний диаметр статора D1, мм; номинальные мощность Р2Н, кВт, КПД ηН и коэффициент мощности CosφН
в относительных единицах (о.е.) принять по заданию на проектирование. Коэффициент kЕ, равный отношению ЭДС обмотки статора к
номинальному напряжению, приближенно определяют по рис. 5.2.
При заданных номинальных мощности Р2Н и частоте вращения nН электромагнитные на1,00 kЕ
2р = 2
грузки – максимальная индук0,98
ция в зазоре Bδ, Тл, и линейная
4
0,96
нагрузка статора A, А/м, – опре10
6
деляют размеры и эксплуатаци0,94
8
2р = 12
онные технические характерис0,92
тики двигателя. Увеличение A
DА,м
0,90
и Bδ уменьшает основные раз0,08 0,1 0,15 0,2 0,3 0,4 0,6 0,8
меры и повышает использоваРис. 5.2. Значения коэффициента kЕ
ние активных материалов машины. Предельно допустимые
значения электромагнитных нагрузок определяются степенью защиты и условиями охлаждения машины, качеством электротехнической стали, классом нагревостойкости изоляции.
Соотношение значений A и Bδ должно находиться в определенных пределах, обеспечивающих требуемые технические показатели
и рабочие характеристики машины. Неоправданное увеличение A и
уменьшение Bδ приводит к увеличению электрических потерь в обмотках, повышенному нагреву обмоток и снижению КПД; сопровож-
111
дается увеличением сопротивлений рассеяния обмоток и снижением
пускового и максимального моментов двигателя. Завышенные значения Bδ при пониженных значениях A приводят к увеличению магнитных потерь, намагничивающего тока и уменьшению коэффициента мощности машины.
0,7
0,6
112
Bδ, Тл
Bδ, Тл
0,88
0,88 2p = 10; 12
2p = 6; 8
2p = 4
0,84
0,84
2p = 2
0,80
0,76
60
0,80
2p = 4
0,76
–3
A·10 ,
А/м
2p = 6; 8
2p = 2
–3
A·10 ,
0,9
А/м 2p = 2
2p = 2
2p = 4
50
60
2p = 4
2p = 6
50
40
2p = 6
30
0,26 0,30 0,34 0,38 0,42
a)
2p = 8
40
DА, м
0,5
2p = 8 2p = 10; 12
0,54 0,58 0,62 0,66 DА, м
б)
Рис. 5.4. Электромагнитные нагрузки асинхронных двигателей с короткозамкнутым ротором (исполнение по степени защиты IP23) при
высотах оси вращения: h = 160–250 мм (а); h ≥ 280 мм (б).
Поэтому индукцию в зазоре Bδ, Т, и линейную нагрузку A, А/м,
для асинхронных двигателей с короткозамкнутым ротором выбирают по графикам электромагнитных нагрузок (рис. 5.3; 5.4), соответствующих двигателям современных серий с удовлетворяющими требованиям государственных стандартов характеристиками.
Для двигателей с фазным ротором индукцию в зазоре Bδ можно выбрать по графикам рис. 5.3 и 5.4. Вследствие худших условий
охлаждения обмоток линейная нагрузка А двигателей с фазным ротором (особенно с всыпными обмотками ротора) обычно меньше,
чем у короткозамкнутых двигателей. С учетом этого предварительное значение линейной нагрузки двигателя с фазным ротором, А/м,
А ≈ k ·AКЗР ,
(5.7)
где k – коэффициент, учитывающий различие линейных нагрузок
статора двигателей с короткозамкнутым и фазным роторами, определяется в зависимости от степени защиты по табл. 5.3; АКЗР – линейная нагрузка машин с короткозамкнутым ротором, А/м, определяемая по графикам рис. 5.3, 5.4.
113
Таблица 5.3
Значения коэффициента k в формуле (5.7)
Степень
защиты
IP44,
IP54
IP23
h, мм
100 – 250
280 – 355
160 – 250
280 – 355
2р = 4
0,65 – 0,77
0,77 – 0,83
0,72 – 0,85
0,95 – 1,02
Число полюсов 2р
2р = 6
2р ≥ 8
0,66 – 0,79
0,7 – 0,82
0,9 – 0,95
0,9 – 0,95
0,73 – 0,86
0,8 – 0,93
0,98 – 1,04
0,98 – 1,06
Коэффициенты полюсного перекрытия αδ и формы поля kB , характеризующие уплощения кривой индукции в зазоре за счет насыщения зубцов сердечников статора и ротора, до расчета магнитной
цепи машины неизвестны. Поэтому считают распределение индукции
в зазоре синусоидальным и предварительно задают коэффициенты αδ
и kB для синусоидальной функции: αδ = 2/π ≈ 0,64; kB = π /(2 2 ) ≈ 1,11.
Предварительное значение обмоточного коэффициента kO1 зависит от выбранного в соответствии с рекомендациями табл. 4.13 типа обмотки статора. Для однослойных обмоток kO1 = 0,95–0,97. Для
одно-двухслойных и двухслойных обмоток при 2р = 2 и шаге обмоток y1 ≈ 2τ/3 следует принимать kO1 = 0,78–0,83, при шаге обмотки
y1 ≈ 5τ/6 в машинах с любым числом полюсов kO1 = 0,9–0,93.
Синхронная скорость вращения двигателя (угловая механическая скорость вращения магнитного поля), рад/с,
1 2 n1 60
или
1 2 f 1 p ,
(5.8)
где n1 – синхронная частота вращения, об/мин; f1 – частота изменения напряжения сети, Гц; р – число пар полюсов машины.
Из формулы (5.1) с учетом значения αδ расчетная длина магнитопровода статора, м,
l P / ( D 121 k B K O1 AB ) ,
(5.9)
где P / – расчетная мощность, В·А; D1 – внутренний диаметр статора,
м; Ω1 – угловая механическая скорость вращения магнитного поля,
рад/с; А – линейная нагрузка статора, А/м; Вδ – индукция в зазоре, Тл.
При правильном выборе главных размеров отношение λ = lδ /τ
должно находиться в пределах заштрихованной области допустимых
значений λ на рис. 5.5 для соответствующего исполнения по степени защиты проектируемого двигателя.
114
а)
λ
2
1
h ≤ 250
мм
h ≥ 280
мм
б)
λ
2
1
0
0
2
4
6 8 10 2р
2
4
6 8 10 2р
Рис. 5.5. Отношение λ = lδ /τ двигателей с исполнением по степени
защиты: IP44, IP54 (a); IP23 (б)
Если полученное расчетное λ незначительно выходит за границы допустимых значений, следует скорректировать lδ, изменяя в
нужную сторону значения DA, D1, A, Bδ в пределах, допускаемых
табл. 5.1, 5.2 и графиками рис. 5.3, 5.4. Если λ значительно превышает допустимое значение, то следует повторить расчет для ближайшей большей высоты оси врашения. При слишком малом λ расчет повторяют для ближайшей меньшей высоты оси вращения.
В двигателях общего назначения (Р2Н ≤ 400 кВт) со степенью защиты IP44, IP54 сердечники шихтуют в виде сплошного пакета без
радиальных вентиляционных каналов. Также выполняют сердечники
длиной до 250–300 мм машин со степенью защиты IP23. Длина сердечника статора l1 и длина стали статора lСТ1 совпадают с расчетной:
l 1 lСТ 1 l .
(5.10)
В защищенных двигателях (исполнение IP23) сердечники длиной более 250–300 мм делят на два пакета равной длины. Между
пакетами устанавливают распорки, образующие радиальный вентиляционный канал шириной bК = 10 мм. Длина сердечника статора
l1 = lδ. Длина стали сердечника статора
lСТ 1 l1 bК ,
(5.11)
где все размеры выражены в одинаковых единицах длины.
Длину сердечника ротора l2 в машинах с h < 250 мм принимают равной l1. При h ≥ 250 мм длина сердечника ротора, м,
l 2 l 1 0,005 ,
(5.12)
где l1 – длина сердечника статора, м.
Сердечник ротора шихтуют с тем же числом пакетов, что и
сердечник статора, и длину стали ротора lСТ2 определяют из соотношений (5.10), (5.11) при замене индекса “1” на “2”.
δ, мм
2
115
Величина воздушного зазора δ между сердечниками стато2p = 6
ра и ротора влияет на исполь2p = 8
зование активных материалов,
h ≤ 250
2p = 4
энергетические показатели и намм
1
дежность двигателя.
2p =
При малом воздушном за2p = 10;12
2
зоре требуется небольшая МДС
8
2p
=
6;
2p = 4
для образования магнитного по8
0
тока машины, вследствие чего
0,2
0,4 D1,
0
уменьшается реактивная составРис. 5.6. К выбору воздушного
м
зазора асинхронных двигателей
ляющая тока холостого хода и
повышается коэффициент мощности двигателя. Вместе с тем при уменьшении зазора возрастают
амплитуды высших гармонических магнитного поля в зазоре машины. Из-за этого увеличиваются поверхностные и пульсационные потери мощности в сердечниках и снижается КПД машины; возрастают моменты от высших гармонических магнитного поля, что ухудшает пусковые свойства двигателя. Также увеличиваются шумы и
вибрации магнитного происхождения, дополнительная нагрузка на
подшипники от сил магнитного тяжения; возникает опасность касания ротора о статор, что понижает надежность двигателя.
Определение оптимального зазора с учетом всех этих факторов представляет сложную задачу. Поэтому при учебном проектировании величину зазора можно определить по усредненным зависимостям зазора δ двигателей современных серий от внутреннего диаметра D1 статора и числа полюсов 2р машины (рис. 5.6). При этом
следует учесть, что наименьший зазор по технологическим условиям производства серий электродвигателей не может быть меньше
0,25 мм. Выбранное по рис. 5.6 значение зазора δ следует округлять
до 0,05 мм при δ ≤ 0,5 мм и до 0,1 мм при δ > 0,5 мм.
h ≥ 280
мм
2p = 2
6. РАСЧЕТ СТАТОРА
6.1. Расчет обмотки статора
В начале расчета определяют число пазов z1 сердечника статора, необходимое для размещения обмотки, тип которой выбирают в
соответствии с рекомендациями параграфа 4.3.
Число пазов z1 должно быть достаточно большим для равномерного распределения катушек обмотки статора.
116
t Z 1, м
1
0,02
4
0,01
3
2
0
0,1
0,2
0,4
τ, м
00,3
Рис. 6.1. Зубцовые деления статора с обмоткой из провода:
1 – прямоугольного сечения; 2–4 – круглого сечения при высотах
оси вращения: 2 – h ≤ 90 мм; 3 – 90 < h ≤ 250 мм; 4 – h ≥ 280 мм
В то же время число пазов ограничено величиной пазового (зубцового) деления tZ1, размеры которого не могут быть меньше допустимых по условиям хорошего заполнения паза и механической прочности зубцов статора. Отвечающие этим требованиям области допустимых значений tZ1 асинхронных двигателей приведены на рис. 6.1.
Для выбранного типа обмотки и высоты оси вращения h следует определить по рис. 6.1 максимально и минимально возможные
размеры tZ1MIN и tZ1MAX зубцового деления статора. Возможный диапазон изменения числа пазов статора:
z1MIN – z1MAX D1 t Z1MAX – D1 t Z1MIN ,
(6.1)
где все размеры выражены в одинаковых единицах длины.
Обычно в двигателях общего назначения число пазов статора z1
выбирают так, чтобы число пазов на полюс и фазу q1= z1/(2pm1)
было целым. Для размещения трехфазной обмотки с целым q1 из
диапазона ( z1MIN – z1MAX ) следует выбрать число z1 так, чтобы отношение z1/р было кратно шести.
В машинах с большим числом полюсов при малом числе пазов статора допустимо выбирать число пазов z1 для обмотки с дробным числом q1 пазов на полюс и фазу со знаменателем дробности
d = 2. В этом случае для симметрии трехфазной обмотки число z1
должно быть таким, чтобы отношение z1/р было кратно трем.
Для выбранного z1 определяют пазовое деление статора, м,
t Z1 D1 / z1 D1 /(2 pm1 q 1) ,
где D1 – внутренний диаметр сердечника статора, м.
(6.2)
117
Значение tZ1 не должно выходить за пределы диапазона допустимых значений (z1MIN – z1MAX ) более чем на 10–15 % и должно быть
больше 6 мм. В противном случае следует корректировать число пазов z1 до достижения требуемой величины пазового деления tZ1.
Число эффективных проводников в пазу статора uП1 должно
быть целым, а у двухслойных обмоток еще и четным, что требует
округления получаемых при расчете предварительных значений uП1.
Чтобы избежать грубых округлений, вначале определяют предварительное число эффективных проводников в пазу u /П1 для минимального числа параллельных ветвей фазы (a1 = 1):
u /П1 D1 A ( z1 I 1Н ) ,
(6.3)
здесь A – выбранная ранее линейная нагрузка, А/м; диаметр D1, м;
номинальный фазный ток обмотки статора, А,
I 1Н P2 Н 10 3 / (m1U1Н Н Cos Н ) ,
(6.4)
где P2Н – номинальная мощность двигателя, кВт; m1 – число фаз обмотки статора; U1Н – номинальное фазное напряжение обмотки статора, В; ηН, CosφН – номинальные КПД и коэффициент мощности
двигателя по заданию на проектирование, о.е.
Далее целесообразно определить все возможные для выбранного типа обмотки значения числа параллельных ветвей a1, из них выбрать такое a1, при котором число эффективных проводников в пазу
u П1 a1u /П1
(6.5)
требует наименьшего округления до целого.
Найденное по формуле (6.5) число uП1 округляют до ближайшего целого для однослойных или до ближайшего целого четного
для одно-двухслойных и двухслойных обмоток. Принятые значения
a1 и uП1 могут быть изменены при выборе числа и размеров элементарных проводников.
Число последовательно соединенных витков фазы статора
w1 u П1 z1 (2a1 m1 ) .
(6.6)
Линейная нагрузка, А/м,
A 2 I1Н w1 m1 ( D1 ) ,
где I1Н – ток статора, А; D1 – внутренний диаметр статора, м.
(6.7)
118
Если найденная по формуле (6.7) линейная нагрузка выходит
за пределы области допустимых значений на рис. 5.3, 5.4 (с учетом
формулы (5.7) для машин с фазным ротором), то следует изменить
uП1, w1 и А в нужную сторону до получения требуемого результата.
После определения z1 и a1 следует рассчитать и составить схему обмотки статора, пользуясь рекомендациями параграфа 4.3.
Обмоточный коэффициент обмотки статора для первой гармонической магнитного поля в зазоре машины
kО1 kУ1k Р1 ,
(6.8)
где kУ1, kР1 – соответственно коэффициенты укорочения и распределения обмотки статора.
Коэффициент укорочения
kУ1 Sin ( / 2) Sin ( 90 ) .
(6.9)
Здесь относительное укорочение шага
y 1Р / ,
(6.10)
где τ – полюсное деление в пазовых делениях по формуле (4.11);
y1Р – расчетный шаг обмотки в пазовых делениях.
Для однослойных обмоток со сплошной фазной зоной условно
принимают
(6.11)
y 1Р ,
следовательно для таких обмоток β = 1 и kУ1 = 1.
Для двухслойных равносекционных обмоток
y 1Р y 1 ,
(6.12)
где y1 – принятый при расчете шаг обмотки в пазовых делениях.
Для одно-двухслойных обмоток
y 1Р 2 (q 1 N Б ) ,
(6.13)
где NБ – число больших (с удвоенным числом витков) катушек в
катушечной группе.
Для двухслойных концентрических обмоток расчетный шаг определяют по формуле (6.12), где y1 – шаг базовой равносекционной
обмотки статора.
Коэффициент распределения для обмоток с целым числом пазов q1 на полюс и фазу
k Р1 0,5 [q 1 Sin (30 / q 1)] .
(6.14)
119
При дробном q1 в формулу (6.14) вместо q1 следует подставлять произведение dq1, где d – знаменатель дробности.
Магнитный поток полюсного деления, Вб,
Φ k ЕU1Н (4k B w1kО1 f1 ) ,
(6.15)
где U1Н – номинальное фазное напряжение, В; f1 – частота изменения
напряжения, Гц; kЕ – коэффициент, о.е., по рис. 5.2.
Амплитуда индукции в зазоре машины, Тл,
B Φ ( l ) pΦ ( D1l ) ,
(6.16)
где Ф – магнитный поток, Вб; все размеры в метрах.
Если определенная по формуле (6.16) индукция Вδ выходит за
пределы области рекомендуемых значений (рис. 5.3, 5.4) более чем
на 5–7 %, то следует изменить uП1 и повторить расчет.
Если при выбранных z1 и uП1 электромагнитные нагрузки А и
Вδ находятся в рекомендуемых пределах, то определяют полное сечение эффективного проводника, мм2,
qЭФ1 I1Н (a 1 J1 ) ,
(6.17)
где I1 – номинальный фазный ток, А; a1 – число параллельных ветвей
обмотки; J1 – допустимая плотность тока, А/мм2.
Для лучшего использования активных материалов машины желательно увеличивать плотность тока J1, но при этом возрастают
электрические потери мощности в обмотке. Поэтому наибольшее
значение J1 ограничено допустимыми максимальной рабочей температурой изоляции обмотки статора и снижением КПД машины.
Влияние первого фактора при выборе плотности тока обмотки статора J1 асинхронных двигателей является преобладающим.
Предварительно допустимая плотность тока в обмотке статора, А/мм2, определяется с учетом линейной нагрузки
J1 ( A J ) 10 6 A ,
(6.18)
здесь произведение (AJ), А2/м3, выбирают по графикам допустимых
значений (рис. 6.2, 6.3) для принятого исполнения двигателя; А – линейная нагрузка статора, А/м.
После определения сечения эффективного проводника следует
выбрать реальные обмоточные провода со стандартными размерами
и классом нагревостойкости изоляции, соответствующим заданию
на проектирование двигателя.
120
–9
(AJ)·10 ,
А2/м3
170
–9
(AJ)·10 ,
А2/м3
2p = 4; 6; 8
2p = 2
150
130
2p = 2
2p = 4
320
2p = 6
280
240
110
0,08 0,12 0,16 0,20 0,24 DА, м
a)
–9
(AJ)·10 ,
2p = 8
2 3
2p
=
6
А /м
220
200
2p = 2;4
180
0,25 0,30 0,35 0,40 0,45 DА, м
б)
–9
(AJ)·10 ,
А2/м3
2p = 2; 4
2p = 8
200
0,26 0,30 0,34 0,38 0,42
г)
–9
(AJ)·10 ,
А2/м3
2p = 2; 4
2p = 6
260
220
180
0,5
DА, м
2p = 8
2p = 10;12
0,54 0,58 0,62 0,66
д)
DА, м
Рис. 6.2. Средние значения произведения (AJ) асинхронных дви2p = 6; 8
гателей с короткозамкнутым ро170
2p = 10;12 тором со степенями защиты: IP44
(IP54) при высотах оси вращения
150
0,5 0,54 0,58 0,62 0,66 DА, м
h ≤ 132 мм (а); h = 160–250 мм (б);
в)
h = 280–355 мм для продуваемых
роторов с аксиальными каналами вмм;
сердечнике ротора (в);
IP23 при высотах оси вращения h = 160–250 мм (г); h = 280–355 мм (д).
190
Для всыпных обмоток, укладываемых в полузакрытые пазы,
применяют обмоточные провода круглого сечения (табл. 4.5) с диаметром изолированного провода dИЗ не более 1,4 мм при механизированной и не более 1,7 мм при ручной укладке обмотки.
Если найденное по формуле (6.17) расчетное сечение qЭФ1 не
превышает сечение проводов с указанными выше предельными диаметрами из табл. 4.5, то принимают число элементарных проводников в эффективном nЭЛ = 1. По табл. 4.5 подбирают провод с сечением qЭЛ, наиболее близким к расчетному значению qЭФ1, и принимают действительное сечение эффективного проводника qЭФ1 = qЭЛ.
121
–9
(AJ)·10 ,
А2/м3
–9
(AJ)·10 ,
А2/м3
2p = 8
2p = 6; 8
180
140
2p = 6
120
160
100
140
2p = 4
80
120
2p = 4
100
60
0,16 0,20 0,24 0,28 0,32 0,36 0,40 DА, м 0,5
a)
0,54 0,58 0,62 DА, м
б)
(AJ)·10 ,
А2/м3
2p = 4
–9
–9
(AJ)·10 ,
А2/м3
2p = 4
200
160
2p = 6
260
2p = 6; 8
120
0,26 0,30 0,34 0,38 0,42
в)
DА, м
220
2p = 8÷12
0
180
0,5 0,54 0,58 0,62 0,66 DА, м
г)
Рис. 6.3. Средние значения произведения (AJ) асинхронных двигателей с фазным ротором со степенями защиты: IP44 (IP54) при высотах оси вращения h ≤ 250 мм (а); h = 280–355 мм (б); IP23 при высотах оси вращения h ≤ 250 мм (в); h = 280–355 мм (г)
В дальнейших расчетах используют выбранные по табл. 4.5 диаметры провода без изоляции d и с учетом толщины изоляции dИЗ.
Если расчетное сечение qЭФ1 превышает сечение проводов с
максимально допустимыми по условиям укладки в полузакрытые пазы диаметрами из табл. 4.5, то эффективный проводник составляют
из нескольких параллельно соединенных элементарных проводников
меньшего по сравнению с qЭФ1 сечения. Для этого по табл. 4.5 подбирают число nЭЛ и сечение qЭЛ элементарных проводников, составляющих эффективный, так чтобы их диаметр с учетом изоляции dИЗ
не превышал максимально допустимых значений и суммарная площадь была близка к расчетному сечению эффективного проводника
nЭЛ qЭЛ qЭФ1 .
(6.19)
122
Для облегчения намотки катушек число элементарных проводников nЭЛ следует принимать не более шести. Чтобы уменьшить nЭЛ,
целесообразно выбирать элементарные проводники с возможно большим в пределах допустимых значений диаметром.
При nЭЛ > 6 следует, если это возможно, увеличить число параллельных ветвей обмотки a1, уточнить число эффективных проводников uП1 по формуле (6.5) и последующий расчет обмотки. Если a1 не
может быть изменено в большую сторону, допустимо увеличить nЭЛ
до 7–8. В двухполюсных машинах из-за малого числа параллельных
ветвей a1 ≤ 2 число элементарных проводников может достигать 10.
После окончательного выбора nЭЛ и qЭЛ определяют действительное сечение эффективного проводника обмотки статора, мм2,
qЭФ1 nЭЛ qЭЛ ,
(6.20)
где qЭЛ – сечение элементарного проводника, мм2.
Чтобы получить действительное сечение эффективного проводника более близким к расчетному, допустимо применение элементарных проводников с двумя разными сечениями.
В обмотках из провода прямоугольного сечения площадь сечения каждого проводника не должна превышать 16–18 мм2 по условиям ограничения потерь мощности от вихревых токов на допустимом уровне. Если расчетное значение qЭФ1 > 16–18 мм2, то эффективный проводник составляют из нескольких элементарных с меньшим сечением qЭЛ < 16–18 мм2.
Поэтому при большом номинальном токе двигателя обмотку
статора для уменьшения числа элементарных проводников nЭЛ следует выполнять с достаточно большим числом a1 параллельных ветвей. В то же время a1 не должно быть очень большим, так как в
этом случае сечение элементарного проводника qЭЛ мало и возникают трудности при намотке полукатушек из провода малого сечения.
Окончательно значения a1, nЭЛ и размеры провода прямоугольного сечения определяются при расчете размеров зубцовой зоны
статора (см. параграф 6.2).
После окончательного выбора a1, nЭЛ, qЭЛ определяют реальную
плоность тока в обмотке, А/мм2,
J1 I1Н (a1 nЭЛ qЭЛ ) I1Н (a1 qЭФ1 ) ,
(6.21)
где I1Н – номинальный ток статора, А; qЭЛ, qЭФ1 – сечения элементарного и эффективного проводников, мм2.
123
Таблица 6.1
Допустимые средние плотности тока в обмотках статоров, А/мм2,
Ротор короткозамкнутый
Ротор фазный
Высота
Исполнение по степени защиты
оси
IP44, IP54 IP23
IP44, IP54
IP23
вращения
2р = 2; 4 2р ≥ 6
2р = 2
2р ≥ 4
2р ≥ 4
2р ≥ 4
h, мм
45 – 71 6,2 – 8,5 6,3 – 7,5
–
–
–
–
80 – 160 5,4 – 7,1 6,3 – 7,3 7,5 – 9,0 6,5 – 7,5 4,4 – 5,4 4,7 – 5,7
180 – 250 4,3 – 5,9 5,3 – 6,9 5,6 – 7,0 5,1 – 6,7 3,0 – 4,5 4,0 – 5,8
≥ 280
3,2 – 3,9 3,8 – 5,0 4,4 – 5,1 4,4 – 5,6 3,7 – 4,9 4,5 – 5,6
Определенное по формуле (6.21) значение J1 не должно выходить за пределы допустимых значений (табл. 6.1) больше, чем на
5–7 %. В противном случае следует, изменяя в небольших пределах
qЭЛ или nЭЛ или обе величины, уточнить qЭФ1 и J1 по формулам
(6.19)–(6.21) до получения допустимого значения J1.
6.2. Расчет зубцовой зоны статора
b1
hА
DА
hА
DА
b2
b Z1
hS1
hП1
b Z1
//
b Z1
hПО
b Z1
hП1
b1
hПО
β1
hК
/
b Z1 b S 1
D1
б)
hS1
/
b Z1 b S 1
D1
а)
hК
Размеры пазов выбирают так, чтобы в пазу достаточно плотно
размещалось требуемое число проводников обмотки вместе с корпусной изоляцией и индукция в зубцах и ярме статора находилась
в допустимых пределах.
Всыпные обмотки из проводов круглого сечения укладывают в
полузакрытые пазы трапецеидальной формы (рис. 6.4).
//
b2
Рис. 6.4. К расчету размеров зубцовой зоны статора с полузакрытыми пазами с трапециевидной (а) или овальной (б) верхней частью
124
Сердечники для укладки всыпных обмоток выполняют с зубцами, стенки которых параллельны. Поперечное сечение зубцов и индукция BZ1 в них постоянны по высоте зубца. Поэтому магнитное
напряжение таких зубцов меньше, чем у трапецеидальных (рис. 6.5).
Полузакрытые пазы для всыпных обмоток выполняют с трапециевидной (рис. 6.4, а) или овальной (рис. 6.4, б) верхней частью, используемой для установки пазовых крышек или клиньев. Угол наклона клиновой части паза (рис. 6.4, а) β = 45° у двигателей с высотами оси вращения h ≤ 250 мм и β = 30° у машин с h ≥ 280 мм при
числе полюсов 2p = 10 или 12. При h ≤ 132 мм применяют также
пазы с овальной клиновой частью (рис. 6.4, б).
Размеры зубцовой зоны определяют по допустимым индукциям
в ярме BA и зубцах BZ1 статора, которые следует выбрать из табл. 6.3.
По выбранным индукциям находят:
высоту ярма, м,
hA Φ (2BA lСТ 1 kС1 ) ;
(6.22)
ширину зубца, м,
bZ1 B tZ 1 l ( BZ1 lСТ 1 kС1 ) ,
(6.23)
где Ф – магнитный поток, Вб; Bδ, BZ1, BA – индукции в зазоре, ярме и
зубцах, Тл; tZ1 – пазовое деление, м; lδ – расчетная длина, м; lСТ1 – длина стали статора, м; kС1 – коэффициент заполнения сердечника сталью
определяют по табл. 6.2 для выбранной марки стали (см. параграф 4.2).
Далее определяют глубину hП1 и ширину b2 паза у дна:
hП1 0,5 ( DA D1 ) hA ;
(6.24)
b2 ( D1 2 hП1 ) z1 bZ1 .
(6.25)
Таблица 6.2
Способ изолирования листов электротехнической стали и коэффициенты
заполнения сталью магнитопроводов асинхронных двигателей
Статор
КороткозамкнуФазный ротор
тый ротор
Способ изо- k Способ изо- k
C
C
лирования
лирования
Марка
стали Способ изо- k
C
лирования
2013,
45–250 2212, Оксидирова- 0,97 Оксидирова- 0,97 Лакировка
ние
ние
2214
2312,
Оксидирова- 0,97
280–315
Лакировка 0,95
Лакировка
2412
ние
h, мм
0,95
0,95
Таблица 6.3
Допустимые значения индукции на участках магнитной цепи асинхронных двигателей, Тл
Участок магнитной Обознацепи
чение
Степень защиты IP44 (IP54)
при числе полюсов 2р
2
4
6
8
10 и 12
1,15–1,35 1,1–1,2
1,4 – 1,6
2
Степень защиты IP23
при числе полюсов 2р
4
6
8
10
12
1
125
1,45 – 1,6
1,2 – 1,4 1,1 – 1,3
Ярмо статора
BA
Зубцы статора при
постоянном сечении BZ 1
1,6–1,9
1,6–1,8 1,8–2,05
1,7–1,95
1,6–1,9
(обмотка из провода
круглого сечения)
Зубцы статора в
1,75–1,95
1,9–2,1
1,8–2,0
наиболее узком се- BZ 1MAX
чении при полуоткрытых пазах
Ярмо ротора:
≤1,45 ≤1,4 ≤1,2
≤1,0
≤1,55 ≤1,5 ≤1,3
≤1,1
– короткозамкнутого
BJ
–
≤1,3 ≤1,15
≤0,9
–
≤1,4 ≤1,2
≤1,0
– фазного
Зубцы ротора при
1,7–1,95
1,75–2,0
постоянном сечении BZ 2
(трапецеидальные
пазы)
Зубцы ротора в наиболее узком сечении: BZ 2MAX
1,5–1,7
1,55–1,9
1,7–2,0
1,65–1,95
– короткозамкнутого
1,65–2,15
1,7–1,95
1,85–2,2
1,75–2,1
– фазного
126
Для нахождения ширины b1 паза в верхней части следует выбрать размеры шлица (открытия) паза. Высота шлица hS1 (рис. 6.4)
определяется из условия достаточной для удержания обмотки в пазу механической прочности кромок зубцов при достаточно малом
пазовом рассеянии. Обычно принимают hS1 = 0,5 мм при высоте оси
вращения h ≤ 132 мм и hS1 = 1 мм при h ≥ 160 мм.
Для свободного прохода провода через шлиц при укладке обмотки ширину шлица bS1 принимают больше суммы двусторонней
пазовой изоляции и диаметра изолированного провода dИЗ. При
ручной укладке обмоток bS1 = dИЗ + (1,5–2); при механизированной –
bS1 ≥ 2,5·dИЗ, размеры bS1, dИЗ в миллиметрах.
Рекомендуемые нормализованные значения bS1 двигателей современных серий приведены в табл. 6.4.
Таблица 6.4
Ширина шлица полузакрытых пазов статора bS1, мм
h, мм
2
1,8
2,0
3,0
3,5
4,0
4,0
–
45 – 63
71
80; 90
100; 112
132
160 – 250
280 – 355
4
1,8
2,0
3,0
3,5
3,5
3,7
–
Число полюсов 2р
6–8
10
1,8
–
2,0
–
2,7
–
3,0
–
3,5
–
3,7
–
–
4,0
12
–
–
–
–
–
–
4,0
Размер b1, мм, пазов с трапециевидной верхней частью (рис.6.4, а):
при β = 45°
b1 [ ( D1 2 hS1 bS1 ) z1 bZ1 ] ( z1 ) ,
(6.26)
при β = 30°
b1 [ ( D1 2 hS1 bS1 3) z1 bZ1 ] ( z1 3) ;
(6.27)
с овальной верхней частью (рис. 6.4,б):
b1 C1 ( z1 ) C12 bS 12 [1 ( z1 ) 2 ]
где
[1 ( z ) ],
C1 ( z1 ) ( D1 2 hS1 ) bZ1 .
1
2
(6.28)
(6.29)
В формулах (6.26)–(6.29) все размеры измерены в миллиметрах.
На параллельных оси машины поверхностях собранного сердеч-
127
ника образуются выступы и впадины (“гребенка”) за счет припусков
на штамповку листов стали и шихтовку магнитопровода. Поэтому в
собранном сердечнике размеры пазов “в свету” меньше найденных
выше размеров в штампе.
Размеры паза “в свету”, мм:
b1/ b1 bП ,
b2 / b2 bП ,
(6.30)
hП1/ hП1 hП ,
где ∆bП, ∆hП – припуски на сборку сердечника по ширине и глубине
паза, мм (табл. 6.5); b1, b2, hП1 – размеры паза в штампе, мм.
Таблица 6.5
Припуски на сборку магнитопроводов, мм,
Высота оси вращения h, мм по ширине паза ΔbП по глубине паза ΔhП
45 – 132
0,1
0,1
160 – 250
0,2
0,2
280 – 355
0,3
0,3
Верхняя клиновая часть паза (выше размерной линии b1 на
рис. 6.4) используется для крепления проводников обмотки в пазу
пазовой крышкой (при h ≤ 160 мм) или клином (при h ≥ 180 мм). Поэтому принято считать, что обмоткой занята только нижняя трапецеидальная часть паза с размером hПО /, мм, (рис. 6.4)
hПО / hП1/ (hS1 hК ) ,
(6.31)
где hК – высота свободной от обмотки верхней части паза и размеры hП1/ и hS1 приведены в миллиметрах.
Для пазов статора с трапециевидной верхней частью (рис. 6.4, а):
при β = 45°
hК 0,5 (b1 bS1 ) ,
(6.32)
при β = 30°
hК 0,5 (b1 bS1 ) 3 ;
(6.33)
с овальной верхней частью (рис. 6.4, б):
hК 0,5 b12 bS21 ,
где размеры b1 и bS1 даны в миллиметрах.
(6.34)
128
Площадь поперечного сечения паза, занятая обмоткой вместе с
изоляцией, мм2,
(6.35)
S П 0,5 (b1/ b2 / ) hПО / ,
где все размеры приведены в миллиметрах.
Площадь корпусной изоляции, мм2,
S ИЗ bИЗ (2 hП1 b 1 b2 ) ,
(6.36)
где bИЗ – односторонняя толщина корпусной изоляции, мм, по
табл. 4.6 или 4.7. Все остальные размеры даны в миллиметрам.
Площадь прокладок на дне паза, под клином, между верхней и
нижней катушками двухслойной обмотки, мм2, для машин:
с h = 180–250 мм
S ПР 0,9 b1 0,4 b2 ,
(6.37)
с h ≥ 180 мм
S ПР 0,6 (b1 b2 ) ,
(6.38)
где размеры b1 и b2 приведены в миллиметрах.
Для однослойных обмоток SПР = 0.
Площадь поперечного сечения паза, занимаемая проводом, мм2,
S П / S П S ИЗ S ПР ,
(6.39)
где SП, SИЗ, SПР – площади сечения паза, изоляции и прокладок, мм2.
Коэффициент заполнения паза изолированным проводом
kЗ u П1 nЭЛ d ИЗ 2 S П / ,
(6.40)
где dИЗ – диаметр изолированного провода, мм; SП / – площадь занимаемая проводом в пазу, мм2.
Коэффициент заполнения для обмоток с ручной укладкой должен находиться в пределах kЗ = 0,69–0,71 при числе полюсов 2р = 2
и kЗ = 0,72–0,74 при 2р ≥ 4. При механизированной укладке обмоток
коэффициент заполнения kЗ = 0,71–0,73.
Если найденный по формуле (6.40) коэффициент заполнения kЗ
меньше указанных значений, то следует уменьшить площадь паза,
увеличив высоту ярма hА или ширину зубца bZ1 или оба размера.
Индукции в ярме BА и зубцах BZ1 при этом уменьшаются. Поэтому
при изменении hА и bZ1 следует уточнить индукции BА и BZ1, Тл:
BА Φ (2 hА lСТ 1 kC1 ) ;
(6.41)
129
BZ1 B t Z1 l (bZ1 lСТ 1 kC1 ) ,
(6.42)
где Ф – магнитный поток, Вб; Bδ – индукция в зазоре, Тл; hА – высота
ярма статора, м; lСТ1 – длина стали статора, м; tZ1 – пазовое деление, м;
bZ1 – ширина зубца, м; kС1 – коэффицициент заполнения сердечника
сталью, принятый ранее по табл. 6.2.
Если полученные по формулам (6.41), (6.42) индукции BА и BZ1
меньше минимальных значений в табл. 6.3, то следует уменьшить
длину l1 или внешний диаметр DA сердечника статора или оба размера. С учетом особенностей охлаждения предпочтительно в двигателях со степенями защиты IP44 и IP54 уменьшение DА; в машинах
со степенью защиты IP23 уменьшение l1.
Допустимо с целью уменьшения электрических потерь в обмотке статора немного повысить коэффициент заполнения kЗ, увеличив
сечение эффективного проводника qЭФ1. Для этого из табл. 4.5 следует выбрать следующий за принятым ранее по условию (6.19) провод с большими диаметрами d, dИЗ и уточнить плотность тока J1 по
формуле (6.21) и kЗ по формуле (6.40). Значение J1 не должно быть
меньше минимальных величин в табл. 6.1 более чем на 5–7 %.
Если найденное по формуле (6.40) значение kЗ превышает допустимые, то нужно увеличить размеры паза, уменьшив высоту ярма hА или ширину зубца bZ1 или оба размера. При этом следует
контролировать соответствие определяемых по формулам (6.41) и
(6.42) индукций BА и BZ1 допустимым значениям в табл. 6.3.
Если индукции BА, BZ1 больше допустимых, то увеличивают длину l1 или внешний диаметр DA сердечника статора или оба размера.
Увеличение внешнего диаметра DA при неизменной высоте оси вращения h возможно только до значения DAMAX, найденного ранее по
формуле (5.2). Чтобы не ухудшить охлаждение машины, следует увеличивать длину l1 в двигателях со степенями защиты IP44, IP54 и
внешний диаметр статора в двигателях со степенью защиты IP23.
Уменьшение сечения элементарных проводников qЭЛ при постоянном их числе nЭЛ для уменьшения kЗ малоэффективно, так как
сопровождается увеличением плотности тока J1 и потерь мощности
в обмотке, и возможно если определенная по формуле (6.21) величина J1 находится вблизи нижней границы допустимых значений в
табл. 6.1. В этом случае следует выбрать по табл. 4.5 ближайший к
принятому ранее по условию (6.19) провод с меньшими диаметрами d, dИЗ и уточнить плотность тока J1 и коэффициент заполнения kЗ
130
по формулам (6.21) и (6.40). Значение J1 не должно превышать максимальных величин в табл. 6.1.
Для уменьшения kЗ можно уменьшить число nЭЛ элементарных
проводников, одновременно увеличив их сечение qЭЛ так, чтобы определяемые по формулам (6.20), (6.21) сечение эффективного проводника qЭФ1 и плотность тока J1 оставались примерно постоянными.
Размеры зубцовой зоны, длину и внешний диаметр сердечника,
сечение и число элементарных проводников следует корректировать
до тех пор, пока коэффициент заполнения kЗ, индукции BА и BZ1,
плотность тока J1 не войдут в пределы допустимых значений.
В двигателях с высотой оси вращения h ≤ 400 мм обмотки из
провода прямоугольного сечения выполняют в виде параллельно соединенных жестких полукатушек, которые укладывают в полуоткрытые прямоугольные пазы (рис. 6.5) с параллельными боковыми стенками. Поперечное сечение зубцов трапецеидальной формы и индукция BZ1 в них непостоянны по высоте зубца. Поэтому для расчета
зубцовой зоны задают допустимые значения индукции BZ1МАХ в наиболее узком сечении зубца (у коронки) и BА в ярме по табл. 6.3.
Далее определяют по формуле (6.22) высоту ярма статора hA, м,
и минимальную ширину зубца, м,
bZ1MIN B t Z1 l ( BZ1MAX lСТ 1 kC1 ) ,
(6.43)
DА
hА
hS1
hК
hП1
30°
hZ1/3
D1
где Bδ, BZ1МАХ – индукции в зазоре и зубце, Тл; tZ1 – пазовое деление, м; lδ – расчетная длина, м; lСТ1 – длина стали
bS1
bZ1MIN
статора, м; kС1 – коэффициент заполнения сердечника
статора сталью по табл. 6.2.
bZ1/3
Глубину паза предварительно определяют по
bП1
30°
формуле (6.24).
Ширина полуоткрытого прямоугольного паза
bП1
bZ1MAX
bП1 = (0,52–0,64) tZ1 в двигателях со степенью защиты
IP44(54); bП1 = (0,47–0,6) tZ1
в двигателях со степенью
Рис. 6.5. К расчету размеров зубцозащиты IP23. Большие знавой зоны статора с прямоугольнычения коэффициентов в
ми полуоткрытыми пазами
131
приведенных соотношениях характерны для меньших внешних диаметров статора DA.
По условиям свободной укладки полукатушек в паз принимают ширину шлица полуоткрытого паза bS1 ≈ 0,6bП1. Высота шлица
hS1 = (1–1,1) мм. Достаточная для крепления полукатушек в пазу высота клина hК = (2,5–3,5) мм.
Ширина полуоткрытого паза в штампе предварительно, мм,
bП1 ( D 1 2 hS1 2 hК ) z1 bZ1MIN ,
(6.44)
где D1 – внутренний диаметр статора, мм; hS1, hК – высота шлица и
клина, мм; z1 – число пазов; bZ1MIN – минимальная ширина зубца, мм.
Обмотки из жестких полукатушек, намотанных проводом прямоугольного сечения, могут быть выполнены только с четным числом элементарных проводников (не менее двух), так как полукатушки, расположенные в пазу на одной высоте, соединяют параллельно.
По ширине паза лежат рядом два элементарных проводника, ширина b, мм, каждого из них предварительно
b 0,5 (bП1 2bИЗ bП ) .
(6.45)
где bП1 – ширина паза, мм; 2bИЗ – двусторонняя толщина изоляции по
ширине паза, мм, определяется по табл. 4.9; ΔbП – припуск на сборку
сердечника по ширине паза, мм, по табл. 6.5.
Далее определяют число nЭЛ, сечение qЭЛ и высоту a реальных
обмоточных проводов прямоугольного сечения, составляющих эффективный проводник.
Обычно в машинах средней мощности (до 400 кВт) nЭЛ = 2 и
может достигать 4–6 при малом числе полюсов 2р = 4 или 2р = 2.
При этом сечение элементарного проводника qЭЛ ≤ 12 мм2. Полукатушки обмотки наматывают одним, двумя или тремя параллельными проводами при nЭЛ = 2, 4 и 6 соответственно, что усложняет изготовление обмотки с nЭЛ ≥ 2.
Поэтому сначала следует принять минимальное число nЭЛ = 2 и
определить предварительно сечение элементарного проводника, мм2,
qЭЛ qЭФ1 nЭЛ ,
(6.46)
где qЭФ1 – сечение эффективного проводника, мм2, рассчитанное ранее по формуле (6.17).
Если qЭЛ > 15–17 мм2, то можно увеличить число параллельных
ветвей обмотки a1, уточнить uП1 по формуле (6.5) и последующий
132
расчет. При невозможности увеличения a1 принимают большее число элементарных проводников nЭЛ = 4–6. Изменяя a1 или nЭЛ или
обе величины вместе, уменьшают qЭЛ до допустимых значений и
определяют высоту провода.
Высота провода a должна находиться в пределах
aMIN a aMAX .
(6.47)
Максимальная высота проводника aMAX не должна превышать
2,5–3,0 мм во избежание поверхностного эффекта, увеличивающего
добавочные потери мощности в обмотке. При изгибе на ребро провода с высотой a < 1,0 мм в процессе намотки полукатушек возможно повреждение изоляции или разрыв самого провода. Поэтому не
рекомендуется применение проводов с высотой меньше aMIN = 1 мм.
Нежелательно также использование проводов прямоугольного
сечения с близкими размерами a и b, так как при намотке катушки
такой провод перекручивается, что увеличивает возможность повреждения изоляции и снижает надежность обмотки. Поэтому размеры
поперечного сечения провода должны отвечать соотношению
a 0,5b .
(6.48)
Высота элементарного проводника, мм, предварительно
a qЭЛ b ,
(6.49)
где qЭЛ – сечение элементарного проводника, мм2, по формуле (6.46);
b – ширина провода, мм, по формуле (6.45).
Если расчетная высота провода a отвечает условиям (6.47) и
(6.48), то по табл. 4.8 выбирают стандартный провод с размерами и
сечением, ближайшими к значениям a, b и qЭЛ, определенным по
формулам (6.49), (6.45) и (6.46). Далее уточняют сечение эффективного проводника и плотность тока в обмотке по формулам (6.20),
(6.21) и рассчитывают окончательно размеры паза.
Если найденная по формуле (6.49) высота провода a > aMAX , то
увеличивают число параллельных ветвей a1 и уточняют расчет обмотки, начав с определения числа эффективных проводников uП1 по
формуле (6.5). Если a1 увеличить нельзя, то увеличивают число элементарных проводников nЭЛ до 4–6 и уточняют сечение qЭЛ и высоту a провода по (6.46), (6.49) до выполнения условий (6.47), (6.48).
Для приближения действительного сечения эффективного проводника к требуемому расчетному можно при nЭЛ = 4 и 6 составлять
эффективный проводник из проводов с двумя разными сечениями.
133
Если определенная по формуле (6.48) высота провода a < aMIN,
то следует уменьшить число параллельных ветвей a1, уточнить uП1
по формуле (6.5) и последующий расчет обмотки.
Окончательные размеры полуоткрытого паза статора в штампе:
ширина, мм,
(6.50)
bП1 2 b / 2 bИЗ bП ;
глубина, мм,
(6.51)
hП1 hПР 2 hИЗ hП hК hS1,
где hПР – высота изолированных проводов в пазу, мм; при одинаковых размерах элементарных проводников в эффективном
hПР 0,5 u П1 nЭЛ a / ;
(6.52)
hК (bП1 bS1 )
(6.53)
высота клина, мм,
3.
В формулах (6.50)–(6.53) 2bИЗ, 2hИЗ двусторонняя толщина изоляции
по ширине и высоте паза, мм, определяется по табл. 4.9; ΔbП, ΔhП –
припуски на шихтовку по ширине и высоте паза, мм, по табл. 6.5;
hК, hS1 – высота клина и шлица, мм; uП1 – число эффективных проводников; nЭЛ – число элементарных проводников в эффективном;
a /, b / - соответственно высота и ширина изолированного провода, мм:
a / a 2 ИЗ ;
(6.54)
b / b 2 ИЗ ,
(6.55)
где 2ΔИЗ – средняя двусторонняя толщина эмалевой изоляции, мм,
для применяемых марок проводов 2ΔИЗ = 0,15 мм.
Если эффективный проводник при nЭЛ > 2 составлен из проводов двух видов с разными сечением и высотой, то высота изолированных проводов в пазу, мм,
hПР 0,5 u П1 [( nЭЛ nЭЛБ ) aМ / nЭЛБ aБ / ] ;
(6.56)
сечение эффективного проводника, мм2,
qЭФ1 u П1 [( nЭЛ nЭЛБ ) qЭЛМ nЭЛБ qЭЛБ ] .
(6.57)
Здесь nЭЛБ – число элементарных проводников с большими сечением
2
qЭЛБ, мм , и высотой aБ /, мм; aМ / – высота, мм, изолированного про2
вода с меньшим сечением qЭЛМ ,мм . Размеры aБ / и aМ / определяют
по формулам (6.54), (6.55); сечения проводов qЭЛБ, qЭЛМ – по табл. 4.8.
134
После расчета размеров паза уточняют по формулам (6.20),
(6.57) сечение эффективного проводника qЭФ1 и плотность тока J1
по формуле (6.21). Далее определяют ширину зубца в наиболее узком месте
bZ1MIN ( D1 2 hS1 2 hК ) z1 bП1 ,
(6.58)
высоту ярма статора
hA 0,5 ( DA D1 ) hП1
(6.59)
и уточняют индукцию в ярме BА по формуле (6.41) и максимальную индукцию BZ1MAX в наиболее узком месте зубца, Тл,
BZ1MAX B t Z1 l (bZ1MIN lСТ 1 kC1 ) ,
(6.60)
где Вδ – индукция в зазоре, Тл; kС1 – коэффициент заполнения сердечника сталью, принятый ранее по табл. 6.2; все размеры в одинаковых единицах измерения длины.
Полученные в результате уточнения значения J1, BA, BZ1MAX
должны находиться в допустимых по табл. 6.1 и 6.3 пределах.
Если плотность тока J1 превышает допустимые значения, то
выбирают провода с большими размерами для соответствующего
уменьшения J1. При этом увеличивают размеры паза, следя за тем,
чтобы определяемые по формулам (6.41), (6.60) индукции ВА и BZ1MAX
не превышали максимальные допустимые значения в табл. 6.3.
При индукциях ВА и BZ1MAX больше допустимых значений, увеличивают в небольших пределах длину l1 или внешний диаметр DA
сердечника статора или оба размера одновременно при условии, что
DA не превосходит DAMAX, определяемого по формуле (5.2). Увеличение l1 предпочтительно для двигателей исполнений IP44, IP54; увеличение DA для машин исполнения IP23. В случае предельного внешнего диаметра DA = DAMAX допустимые уровни индукции BA и BZ1MAX
часто могут быть достигнуты только за счет уменьшения размеров
паза. Для этого уменьшают число эффективных проводников в пазу uП1 с пропорциональным увеличением магнитного потока Ф и
соответственно длины l1 статора.
Уточнение размеров сердечника статора, зубцовой зоны, числа
и размеров проводов в пазу выполняют до получения допустимых
значений плотности тока J1 и индукций BA и BZ1MAX.
135
7. РАСЧЕТ РОТОРА
7.1. Обмотка и зубцовая зона фазных роторов
В соответствии с рекомендациями параграфа 4.4 следует выбрать число фаз m2 = m1, число полюсов 2р2 = 2р и число пазов на
полюс и фазу q2 обмотки ротора; определить число пазов ротора z2
по формуле (4.24); выбрать шаг обмотки ротора y2 и найти обмоточный коэффициент обмотки ротора kО2 по формулам (6.8)–(6.14),
заменяя в них индекс “1” на “2”.
Для уменьшения тока в щеточных контактах всыпные обмотки
из провода круглого сечения рассчитывают так, чтобы напряжение
на контактных кольцах UКК при пуске было близко к номинальному линейному напряжению обмотки статора. Принимают напряжение UКК = 200–350 В и определяют предварительно действующее значение фазной ЭДС Е2 ротора. В большинстве машин обмотку фазного ротора соединяют в звезду.
Фазная ЭДС Е2, В, при соединении обмотки ротора:
в звезду
E2 U КК 3 ,
(7.1)
в треугольник
Е2 U КК .
(7.2)
Пренебрегая различием обмоточных коэффициентов kО1, kО2 обмоток статора и ротора и падением напряжения в обмотке статора
(kЕ = 1), определяют предварительное значение числа последовательно соединенных витков фазы ротора
w2 w1 E2 U1Н ,
(7.3)
здесь w1 – число последовательно соединенных витков фазы статора;
Е2 – фазная ЭДС ротора, В; U1Н – номинальное фазное напряжение
обмотки статора, В.
В большинстве случаев обмотки фазных роторов выполняют с
одной параллельной ветвью. Поэтому при первом расчете по формулам (7.4)–(7.6) принимают число параллельных ветвей a2 = 1.
Число эффективных проводников в пазу ротора
u П 2 2 a2 m2 w2 z2 a2 w2 ( p2 q2 ) ,
(7.4)
здесь число фаз ротора m2 = m1; z2 – число пазов ротора; w2 – число
136
витков фазы обмотки ротора; q2 – число пазов на полюс и фазу;
число полюсов обмотки ротора p2 = p.
Так как обмотка ротора двухслойная, рассчитанное по формуле (7.4) значение uП1 округляют до ближайшего целого четного числа и уточняют число витков фазы ротора
w2 u П 2 p2 q2 a2 .
(7.5)
В роторах с двухслойной стержневой обмоткой uП2 всегда равно двум, поэтому предварительное значение ЭДС Е2 фазы не определяют. Число последовательно соединенных витков фазы стержневой волновой обмотки ротора
w2 2 p2 q2 a2 z2 (a2 m2 ) .
(7.6)
После расчета w2 необходимо по формулам (7.1), (7.2) проверить напряжение на контактных кольцах ротора UКК. У двигателей
мощностью Р2Н ≤ 400 кВт напряжение UКК не должно превышать номинальное линейное напряжение статора: для всыпных обмоток ротора UКК ≤ 380 В; для стержневых обмоток UКК ≤ 500–690 В.
При больших значениях напряжения UКК необходимо его снизить в первую очередь за счет увеличения числа параллельных ветвей a2 и уточнить число витков фазы w2 по формулам (7.4)–(7.6).
При этом нужно помнить, что число параллельных ветвей стержневых обмоток не может быть больше двух и стержневую волновую
обмотку с a2 = 2 можно выполнить только для целого q2.
Понизить напряжение UКК можно уменьшая число витков фазы w2. У всыпных обмоток уменьшить w2 можно за счет уменьшения числа эффективных проводов uП2 при неизменном числе пазов
z2. У стержневых обмоток уменьшить w2 можно только пропорционально уменьшая z2, так как у таких обмоток uП2 = 2 = Const.
Предварительно номинальный фазный ток обмотки ротора, А,
I 2 Н k I I I1Н ,
(7.7)
здесь коэффициент, учитывающий влияние намагничивающего тока
и зависящий от принятого в задании на проектирование коэффициента мощности,
k I 0,2 0,8 Cos Н ;
(7.8)
коэффициент приведения токов
I m 1 w1 kО1 (m2 w2 kО 2 ) ;
(7.9)
137
номинальный фазный ток статора I1Н, А, по формуле (6.4).
Сечение эффективного проводника обмотки ротора, мм2,
qЭФ 2 I 2 Н (a2 J 2 ) ,
(7.10)
где J2 – плотность тока ротора, А/мм2, по табл. 7.1; I2Н – ток ротора, А.
Таблица 7.1
Допустимые плотности тока в обмотках фазных роторов, А/мм2
Тип обмотки
Всыпная петлевая
Стержневая волновая
Исполнение IP44
4,0 – 6,0
3,5 – 4,4
Исполнение IP23
4,5 – 6,5
4,0 – 6,0
Для всыпных обмоток, укладываемых в полузакрытые пазы
(рис. 7.1), применяют провод круглого сечения (табл. 4.5) с диаметром изолированного провода dИЗ не более 1,7 мм. Число элементарных проводников в эффективном nЭЛ и сечение элементарных проводников qЭЛ подбирают также, как и для всыпных обмоток статора, исходя из условия (6.19) при замене в формуле (6.19) индекса
“1” индексом “2”. В обмотках фазных роторов nЭЛ достигает 7–8.
После окончательного выбора qЭЛ и nЭЛ определяют действи2
тельное сечение эффективного проводника всыпной обмотки, мм ,
qЭФ 2 nЭЛ qЭЛ ,
(7.11)
где qЭЛ – сечение элементарного проводника, мм2, по табл. 4.5.
В стержневых обмотках эффективные проводники независимо
от их размеров не делят на элементарные, так как эффект вытеснения тока в обмотке ротора при изменении нагрузки от нуля до номинальной не проявляется из-за малой частоты f2 = sf1 тока ротора.
Поэтому сечение стержня ротора qС = qЭФ2. Размеры стержня и его
сечение окончательно уточняют при расчете зубцовой зоны ротора.
Для расчета зубцовой зоны ротора определяют внешний диаметр D2 и зубцовое (пазовое) деление tZ2 ротора:
D2 D1 2 ;
t Z 2 D2 z2 ,
(7.12)
(7.13)
где все размеры измерены в одних единицах измерения.
Всыпные обмотки из провода круглого сечения укладывают в
трапецеидальные полузакрытые пазы с трапециевидной (рис. 7.1, а)
или овальной (рис. 7.2, б) верхней частью. Зубцы ротора с параллель-
138
ными стенками имеют постоянное сечение по высоте.
По табл. 6.3 выбирают допустимую индукцию BZ2 в зубцах ротора и определяют ширину зубца ротора, м,
bZ 2 B tZ 2 l ( BZ 2 lСТ 2 kС 2 ) ,
(7.14)
где Bδ, BZ2 – индукции в зазоре и зубцах, Тл; tZ2 – пазовое деление ротора, м; lδ – расчетная длина, м; lСТ2 – длина стали ротора, м; kС2 – коэффициент заполнения сердечника ротора сталью (табл. 6.2).
Для расчета ширины b1 верхней части паза у коронок зубцов
(рис. 7.1) задают ширину нижней части паза b2 и размеры шлица hS2
и bS2. У большинства двигателей b2 = 3,5–6 мм и не может быть
меньше 3 мм из-за достаточно большой толщины корпусной изоляции в пазу ротора. Высота шлица hS2 = 1 мм при высоте оси вращения h ≥ 160 мм и hS2 = 0,5 мм при h < 160 мм. Ширину шлица
можно выбрать по табл. 6.4.
Глубина паза, мм, с трапециевидной верхней частью (рис. 7.1, а)
hП 2 0,5[ D2 z2 (bZ 2 b2 ) ] ;
(7.15)
с овальной верхней частью (рис. 7.1, б)
hП 2 0,5 [ D2 b2 z2 (bZ 2 b2 ) ] .
(7.16)
Размер b1, мм, у пазов с трапециевидной верхней частью
b1 [ ( D2 2 hS 2 bS 2 ) z2 bZ 2 ] ( z2 ) ;
с овальной верхней частью
b1 C2 ( z2 ) C22 bS 2 [1 ( z2 ) 2 ]
(7.17)
[1 ( z ) ], (7.18)
C2 ( z2 ) ( D 2 2 hS 2 ) bZ 2 .
2
2
(7.19)
В формулах (7.15)–(7.19) все размеры приведены в миллиметрах.
После определения размеров паза в штампе следует по формулам (6.30)–(6.40) рассчитать размеры паза в свету, занимаемую проводом площадь паза и коэффициент заполнения паза ротора kЗ, подставляя в формулы (6.30)–(6.40) вместо размеров паза статора соответствующие размеры паза ротора. Занятая обмоткой площадь поперечного сечения паза, изображенного на рис. 7.1, б, мм2,
S П 0,5 (b1/ b2 / ) (hПО / 0,5 b2 / ) (b2 / ) 2 8 ,
где все размеры даны в миллиметрах.
(7.20)
б)
bS2
b Z2
bS2
/
hК
/
hS2
b Z2
hК
а)
45°
hП2
b2
hПО
b Z2
hПО
b Z2
hП2
b1
D2
D2
b1
hS2
139
b2
bZ2//
//
b Z2
Рис. 7.1. К расчету зубцовой зоны ротора с всыпной обмоткой
При определении площади корпусной изоляции SИЗ в пазу по
формуле (6.36) толщину изоляции принимают по табл. 4.7.
Если коэффициент заполнения паза ротора находится в пределах kЗ = 0,72–0,74, то проверяют индукцию в зубцах ротора, Тл,
BZ 2 B tZ 2 l (bZ 2 lСТ 2 kC 2 )
(7.21)
и плотность тока в обмотке ротора, А/мм2,
J 2 I 2 Н (a2 qЭФ 2 ) ,
(7.22)
где Bδ – индукция в зазоре, Тл; kС – коэффициент заполнения сталью
по табл. 6.2; I2Н – номинальный ток ротора, А; qЭФ2 – сечение эффективного проводника, мм2; a2 – число параллельных ветвей обмотки
ротора; все размеры выражены в одних единицах измерения длины.
Найденные по формулам (7.21), (7.22) индукция BZ2 и плотность
тока J2 должны находиться в пределах области допустимых значений этих величин (табл. 6.3 и 7.1).
Если значения kЗ, BZ2 и J2 выходят за границы допустимых значений, то необходимо изменять в небольших пределах размеры зубца и паза ротора, сечение и размеры элементарных проводников обмотки ротора до достижения этими величинами допустимых значений. При этом длина сердечника ротора l2 должна оставаться постоянной, так как изменение l2 влечет за собой изменение длины l1
сердечника статора и корректировку расчета статора.
В фазных роторах со стержневыми обмотками применяют по-
140
лузакрытые пазы с размерами шлица: высота hS2 = 0,5–0,7 мм (у машин серии 4А hS2 = 0,6 мм); ширина bS2 = 1,5 мм (рис. 7.2).
Предварительно ширина паза, мм,
b S2
hК
hS2
bП 2 K tZ 2 ,
b П2
hП2
45°
hПО
D2
bZ2MAX
bZ2MIN
Рис. 7.2. К расчету зубцовой зоны фазного ротора
со стержневой обмоткой
(7.23)
где K – коэффициент, определяемый
по табл. 7.2.; tZ2 – пазовое деление ротора, мм.
Предварительные размеры стержня ротора: ширина b и высота a, мм,
b bП 2 2 bИЗ bП ;
a qC b qЭФ 2 b ,
(7.24)
(7.25)
где bП2 – ширина паза, мм; 2bИЗ – двусторонняя толщина изоляции по ширине паза, мм, (табл. 4.15); ΔbП – припуск на сборку сердечника по ширине паза, мм, (табл. 6.5); qC = qЭФ2 – сечение стержня, мм2.
Таблица 7.2
Значения коэффициента K = bП2/tZ2 в формуле (7.23)
Число полюсов 2р = 4
2р = 6
2р = 8
2р = 10
2р = 12
K
0,32–0,37 0,33–0,42 0,35–0,44 0,37–0,46 0,3–0,45
По табл. 4.14 подбирают медную шину с размерами a, b и сечением, ближайшими к найденным по формулам (7.24), (7.25), (7.10).
После этого определяют размеры паза ротора в штампе, мм:
ширина
bП 2 b 2 bИЗ bП ;
(7.26)
глубина
hП 2 2 a 2 hИЗ hП hК hS 2 ,
(7.27)
где высота клина
hК 0,5 (bП 2 bS 2 ) .
(7.28)
В формулах (7.26)–(7.28) a, b – высота и ширина стержня, мм, определены по табл. 4.14; ΔbП, ΔhП – припуски на сборку сердечника, мм,
(табл. 6.5); 2bИЗ, 2hИЗ – двусторонняя толщина изоляции, мм, по ширине и высоте паза (табл. 4.15); bS2, hS2, bП2 – размеры паза, мм, (рис. 7.2).
141
Далее определяют ширину зубца bZ2MIN и максимальную индукцию BZ2MAX в наиболее узком сечении:
bZ 2MIN ( D2 2 hП 2 ) z2 bП 2 ;
BZ 2MAX B t Z 2 l (bZ 2MIN lСТ 2 kС 2 ) ,
(7.29)
(7.30)
здесь Bδ, BZ2MAX – индукции, Тл; kC2 = 0,95 – коэффициент заполнения
сердечника сталью; размеры приведены в одних единицах измерения.
Действительную плотность тока J2 в обмотке ротора определяют по формуле (7.22), принимая сечение эффективного проводника
qЭФ2 равным сечению шины с выбранными по табл. 4.14 размерами.
Найденные по формулам (7.22), (7.30) плотность тока J2 и индукция BZ2MAX должны находиться в пределах допустимых значений
этих величин (табл. 6.3 и 7.1). В противном случае необходимо корректировать размеры паза и стержня обмотки ротора до тех пор,
пока J2 и BZ2MAX не войдут в область допустимых значений.
7.2. Обмотка и зубцовая зона короткозамкнутых роторов
Число фаз m2 и полюсов 2р2 литой из алюминия короткозамкнутой обмотки ротора не определено структурой обмотки. Число
полюсов ротора 2р2 автоматически устанавливается равным числу
полюсов обмотки статора 2р. Поэтому один и тот же ротор может
работать в машинах с разным числом полюсов обмотки статора или
в многоскоростных двигателях с переключаемым числом полюсов
обмотки статора.
Принято считать, что каждый стерФаза 2 Фаза 3
жень образует одну фазу короткозамкнутой обмотки. Поэтому число фаз обмотки
Фаза 1
равно числу пазов ротора m2 = z2. Каждая
фаза состоит из одного стержня с двумя
примыкающими с торцов ротора отрезками короткозамыкающих колец (рис. 7.3).
Стержень с отрезками колец образует поФаза 4
ловину витка, поэтому число витков фазы
Рис. 7.3. Фазы литой
ротора w2 = ½ = 0,5. Обмоточный коэффиобмотки короткозамкфициент такой обмотки равен единице, а
нутого ротора
условное число пазов на полюс и фазу
q2 z2 (2 p2 m2 ) 1 (2 p2 ) 1 (2 p) .
(7.31)
142
Число пазов z2 короткозамкнутого ротора не может быть выбрано произвольно, так как от соотношения числа пазов статора z1
и ротора z2 зависят рабочие, пусковые и виброшумовые характеристики двигателя. Неудачный выбор z2 приводит к увеличению высших
гармонических магнитного поля в зазоре машины. Вследствие этого
возрастают добавочные потери мощности, добавочные асинхронные
и синхронные моменты и радиальные силы, которые снижают момент двигателя при пуске и усиливают шумы и вибрации машины.
В результате исследований установлено, что для уменьшения
добавочных потерь в зубцах сердечников и асинхронных моментов,
обусловленных высшими (в основном зубцовыми) гармоническими
магнитных полей и пульсациями проводимости воздушного зазора,
число пазов ротора z2 должно быть близким к числу пазов статора
и находиться в пределах
0,8z1 z2 1,25 z1 .
(7.32)
Соотношения z1 и z2, снижающие синхронные моменты и шумы магнитного происхождения, более сложны и приведены в /6, 10, 12/.
Наиболее благоприятные соотношения числа пазов сердечников
статора и ротора для разного числа полюсов приведены в табл. 7.3.
Обычно в двигателях мощностью Р2Н ≤ 100–110 кВт (h ≤ 250 мм)
выбирают z2 < z1, чтобы получить достаточно большое сечение паза,
обеспечивающее качественную заливку пазов алюминием. В большинстве двигателей с однослойными обмотками статора (h ≤ 160 мм)
выполняют скос пазов ротора на величину bСК, составляющую от 0,8
до 1,5 зубцового деления статора tZ1 или ротора tZ2. В машинах серий 4А и АИ с высотами оси вращения h ≤ 160 мм пазы скошены
на одно зубцовое (пазовое) деление статора и bСК = tZ1.
В двигателях мощностью Р2Н > 100 кВт (h > 250 мм) для уменьшения тока в стержнях и более равномерного распределения стержней по окружности ротора выбирают z2 > z1.
Номинальный фазный ток в стержне ротора IСН = I2Н определяют по формуле (7.7), подставляя в нее коэффициент приведения токов короткозамкнутого ротора
I 2 m 1w1 kО1 ( z2 kСК ) ,
(7.33)
здесь коэффициент скоса, учитывающий уменьшение ЭДС стержней
за счет скоса пазов:
kСК 2 Sin ( СК 2) СК .
(7.34)
143
Таблица 7.3
Рекомендуемые числа пазов короткозамкнутых роторов
Число пазов ротора z2
Пазы без скоса
Пазы со скосом
12
9*,15*
—
18
11*, 12*, 15*, 21*, 22*
14*, (18*), 19*, 22*, 26, 28*
24
15*, (16*), 17*, 19, 32
18, 20, 26, 31, 33, 34, 35
2
30
22, 38
(18), 20, 21, 23, 24, 37
36
26, 28, 44, 46
25, 27, 29, 30, 43, 45, 47
42
32, 33, 34, 50, 52
—
48
38, 40, 56, 58
37, 39, 41, 55, 57, 59
12
9*
15*
18
10*, 14*
18*, 22*
24
15*, 16*, 17, (32)
16, 18, (20), 30, 33, 34,
36
26, 44, 46
(24), 27, 28, 30, (32), 34, 45
4
42
(34, 50), 52, 54
(33), 34, (38, 51), 53
48
34, 38, 56, 58, 62, 64
(36, 38, 39), 40, (44), 57
60
50, 52, 68, 70, 74
48, 49, 51, 56, 64, 69, 71
72
62, 64, 80, 82, 86
61, 63, 68, 76, 81, 83
36
26, 46, (48)
28*, 33, 47, 49, 50
54
44, 64, 66, 68
42, 43, 50, 51, 65,67
6
72
56, 58, 62, 82, 84, 86, 88
57, 59, 60, 61, 83, 85, 87, 90
90
74, 76, 78, 80, 100, 102, 104
75, 77, 79, 101, 103, 105
—
36
28
(34), 36, 44, 62, 64
48
35, 44, 61, 63, 65
56, 58, 86, 88, 90
8
72
56, 57, 59, 85, 87, 89
66, (68), 70, 98, 100, 102, 104 (68, 69, 71, 97, 99, 101)
84
78, 82, 110, 112, 114
96
79, 80, 81, 83, 109, 111, 113
60
44, 46, 74, 76
57, 69, 77, 78, 79
90
68, 72, 74, 76, 104, 106, 108,
70, 71, 73, 87, 93, 107, 109
110, 112, 114
10
120
86, 88, 92, 94, 96, 98, 102, 104, 99, 101, 103, 117, 123, 137,
106, 134, 136, 138, 140, 142,
139
144, 146
72
56, 64, 80, 88
69, 75, 80, 89, 91, 92
90
68, 70, 74, 88, 98, 106, 108, 110 (71, 73), 86, 87, 93, 94, (107)
108
86, 88, 92, 100, 116, 124, 128, 84, 89, 91, 104, 105, 111, 112,
12
130, 132
125, 127
144
124, 128, 136, 152, 160, 164,
125, 127, 141, 147, 161, 163
166, 168, 170, 172
П р и м е ч а н и я: * Для машин малой мощности.
1. При числах пазов в скобках возможна повышенная вибрация машины.
2p
z1
144
В формуле (7.34) центральный угол скоса пазов в радианах
СК 2 p СК z2 ,
(7.35)
где βСК – скос пазов в долях зубцового деления, βСК = bСК /tZ1 или
βСК = bСК /tZ2; все размеры измерены в одних единицах длины.
Сечение стержня ротора, мм2,
qC I CН J 2 ,
(7.36)
где IСН – номинальный ток в стержне ротора, А; J2 – плотность тока
в стержне короткозамкнутого ротора, А/мм2.
Для заливаемых алюминием роторов двигателей закрытого обдуваемого исполнения IP44, IP54 плотность тока в стержнях ротора
выбирают в пределах J2 = 2,5–3,5 А/мм2; защищенного исполнения
IP23 – на 10–15 % выше. Для машин больших мощностей следует
выбирать меньшие значения плотности тока.
Ток в короткозамыкающем кольце ротора, А,
I КЛ I СН ,
(7.37)
здесь IСН – ток стержня, А; коэффициент приведения тока кольца к
току стержня
2 Sin ( p z2 ) .
(7.38)
Для лучшего отвода тепла от стержней ротора и увеличения
пускового момента двигателя выбирают плотность тока JКЛ в короткозамыкающем кольце на 15–25 % меньше плотности тока в стержне ротора J2.
Сечение короткозамыкающего кольца, мм2,
qКЛ I КЛ J КЛ ,
(7.39)
здесь IКЛ – ток кольца, А; JКЛ – плотность тока, А/мм2.
Короткозамыкающие кольца отливают с поперечным сечением
в виде неправильной трапеции, большее основание которой плотно
прилегает к торцу ротора (рис. 7.4). После заливки ротора алюминием кольца, соединенные между собой стержнями, удерживают сердечник ротора в спрессованном состоянии.
В дальнейших расчетах используют средние размеры hКЛ и bКЛ
кольца. При высоте оси вращения h ≤ 250 мм средняя высота (радиальный размер) кольца 0,85hП2 ≤ hКЛ ≤ 1,4hП2; при h = 280–355 мм высота кольца hП2 ≤ hКЛ ≤ 1,7hП2.
hКЛ
bКЛ
hКЛ
bКЛ
DКЛСР
D2
б)
DКЛСР
D2
a)
145
Средняя ширина (осевой размер)
короткозамыкающего кольца, мм,
Рис. 7.4. Короткозамыкающие кольца роторов
bКЛ qКЛ hКЛ ,
(7.40)
где qКЛ – сечение кольца, мм2; hКЛ – высота кольца, мм.
Размеры короткозамыкающего кольца округляют до десятых долей миллиметра при h ≤ 250 мм и до 0,5 мм при
h = 280–355 мм, после чего определяют
фактическое расчетное сечение, мм2,
qКЛ bКЛ hКЛ
(7.41)
где hКЛ, bКЛ – найденные с учетом округления размеры кольца, мм.
Средний диаметр короткозамыкающих колец (рис. 7.4)
DКЛСР D2 hКЛ .
(7.42)
У большинства асинхронных двигателей с высотами оси вращения h ≤ 250 мм для литой из алюминия короткозамкнутой обмотки ротора используют трапецеидальные пазы с обращенной к зазору широкой верхней частью (рис. 7.5). Размеры паза b1, b2 и h1 желательно выбирать так, чтобы стенки зубца были параллельны.
В роторах двигателей с h < 160 мм применяют полузакрытые
пазы с узким шлицем в верхней части. Размеры шлица (рис. 7.5, а):
ширина bS2 = 1,0 мм и высота hS2 = 0,5 мм при h ≤ 100 мм; bS2 = 1,5 мм
и hS2 = 0,75 мм при h = 112–132 мм. В двигателях с h = 160–250 мм и
числом полюсов 2р ≥ 4 пазы трапецеидальные закрытые (рис. 7.5, б)
с размерами шлица bS2 = 1,5 мм и hS2 = 0,7 мм; высота перемычки над
шлицем hS2 / = 0,3 мм. В двухполюсных двигателях с h = 160–250 мм
применяют закрытые пазы: трапецеидальные без шлица (рис. 7.5, в)
с высотой перемычки hS2 / = 1,0 мм при h ≤ 225 мм и бутылочные
(рис. 7.7) с высотой перемычки hS2 / = 1,5 мм при h = 250 мм.
Размеры b1, b2, h1 изображенных на рис. 7.5 трапецеидальных
пазов рассчитывают исходя из найденного по формуле (7.36) сечения стержня qС при условии постоянства ширины зубца.
По табл. 6.3 выбирают допустимую индукцию в зубце BZ2 и по
формуле (7.14) определяют ширину зубца ротора bZ2.
hS2 /
b Z2
D2
b Z2
h1
b1
b Z2 /
D2
b Z2 /
hП2
hS2 /
h1
b Z2
bS2
b1
hП2
h1
hП2
b1
b Z2 /
D2
hS2
bS2
hS2
146
//
b 2 b Z2
//
b 2 b Z2
//
b 2 b Z2
а)
б)
в)
Рис. 7.5. Трапецеидальные пазы роторов для литой короткозамкнутой обмотки двигателей с высотами оси вращения h < 160 мм (а);
с h = 160–250 мм и 2р ≥ 4 (б); с h = 160–225 мм при 2р = 2 (в).
Размеры паза (рис. 7.5), мм:
b1 [ ( D2 2hS 2 2 hS 2 / ) z2 bZ 2 ] ( z2 ) ;
(7.43)
b2 [b12 ( z2 2) 4 qC ] ( z2 2) ;
(7.44)
h1 z2 (b1 b2 ) (2 ) ,
(7.45)
где qС – сечение стержня, мм2. Все размеры даны в миллиметрах;
здесь и далее принимать hS2 / = 0 для паза по рис. 7.5, а и hS2 = 0
для паза по рис. 7.5, в.
По условиям качественной заливки пазов алюминием диаметр
закругления нижней части паза b2 должен быть не менее 1,5–2 мм
в двигателях с h ≤ 132 мм и 2,5–3 мм в машинах с h ≥ 160 мм. Если найденный по формуле (7.44) диаметр b2 соответствует приведенным выше соотношениям, то по формулам (7.48), (7.49) определяют
глубину паза hП2 и фактическое сечение стержня qC.
Если размер b2 меньше допустимого по условиям заливки ротора алюминием, то можно немного (на 5–10 %) уменьшить сечение
стержня qC или ширину зубца bZ2 ротора или оба размера и уточнить размеры пазов по формулам (7.43)–(7.45).
Часто, особенно в двухполюсных двигателях, просто увеличивают диаметр b2 до минимально необходимого по условиям заливки
ротора алюминием. В этом случае нарушается параллельность стенок зубца. Поэтому определяют ширину нижней наиболее узкой
части зубца (рис. 7.5), мм,
147
bZ 2 // [ D2 2 (hS 2 hS 2 / ) b1 2h1 ] z2 b2
(7.46)
и максимальную индукцию в наиболее узком сечении зубца, Тл,
BZ 2MAX B tZ 2 l (bZ 2 // lСТ 2 kC 2 ) ,
(7.47)
где Bδ – индукция в зазоре, Тл; kC2 – коэффициент заполнения сердечника сталью по табл. 6.2; все размеры в миллиметрах.
Найденная по формуле (7.47) индукция BZ2MAX не должна превосходить максимально допустимого значения индукции в зубце ротора (табл. 6.3).
Размеры паза следует корректировать до тех пор, пока диаметр b2 и индукция BZ2MAX не войдут в допустимые пределы.
Размеры паза округляют до десятых долей миллиметра и определяют глубину паза (высоту зубца) hП2, мм, и фактическое сечение стержня qC, мм2:
hП 2 0,5 (b1 b2 ) h1 hS 2 hS 2 / ;
(7.48)
qC (b12 b22 ) 8 0,5 (b1 b2 ) h1 ,
(7.49)
D2
h1
hП2
hS2
где все размеры в миллиметрах.
Для повышения пускового момента в машинах с высотами оси
вращения h = 280–355 мм применяют закрытые пазы: при числе полюсов 2р ≥ 4 трапецеидальные с обращенной к зазору узкой верхней
частью (рис. 7.6), при числе полюсов 2р = 2 – лопаточные (рис. 7.7).
Для расчета трапецеидальных пазов
bZ2MAX
(рис. 7.6) по табл. 6.3 выбирают допустимую индукцию BZ2MAX в наиболее узком
сечении зубца и определяют минимальb1
ную ширину зубца
bZ 2 MIN
b2
bZ2MIN
Рис. 7.6. Трапецеидальные пазы короткозамкнутых роторов
B t Z 2 l
,
BZ 2 MAX lСТ 2 kC 2
(7.50)
где BZ2MAX, Bδ – индукции, Тл; kC2 – коэффициент по табл. 6.2; все размеры в метрах.
Диаметр закругления верхней части
паза b1 выбирают кратным 0,5 мм в пределах от 3,5 до 5,5 мм. Высота перемычки над пазом hS2 / = 0,5 мм.
148
Диаметр закругления нижней части паза предварительно, мм,
b2 C3 C32 2 b1 (C2 b1 4) 4 qC
( z2 2) ,
(7.51)
где
C2 0,5 ( D2 2 hS 2 / b1 ) z2 bZ 2 MIN (2 ) ;
(7.52)
C3 (С2 0,5 b1 z2 ) ( z2 2) ;
(7.53)
qС – сечение стержня, мм2; все размеры в миллиметрах.
Расстояние между центрами закруглений, мм,
h1 C2 z2 b2 (2 ) ,
(7.54)
где b2 – диаметр, мм; C2 определяется по формуле (7.52).
После определения размеров паза рассчитывают по формулам
(7,48), (7.49) глубину паза и фактическое сечение стержня.
Для получения возможно большего активного сопротивления
ротора и соответственно увеличения пускового момента машины за
счет вытеснения тока в стержнях при пуске высоту верхней части hВ
лопаточного паза, заливаемого алюминием (рис. 7.7), выполняют примерно равной глубине проникновения электромагнитной волны в
алюминий ΔА ≈ 15 мм. Обычно выбирают hВ = 13,5–16 мм. Высота перемычки над пазом hS2 / = 1,5 мм при h = 250 мм и hS2 / = 0,5–1,0 мм
при h = 280–355 мм. В двигателях современных серий чаще применяют изображенные на рис. 7.7, а пазы, обеспечивающие большее
сечение стержня при одинаковой глубине паза и ширине зубца.
hВ
bВ
bZ2Н
D2
bZ2MIN
b 1Н
bZ2Н
bZ2Н
h1Н
bZ2Н
bВ
b2Н bZ2Н
b2Н bZ2Н
Рис. 7.7. Лопаточные пазы короткозамкнутого ротора
D2
bZ2MAX
bZ2MIN
b 1Н
h1Н
б)
hS2
bZ2MAX
hП2
hП2
hВ
hS2
a)
149
Размеры нижней части лопаточных пазов рассчитывают исходя
из найденного по (7.36) сечения стержня qС и постоянства ширины
зубца ротора. По табл. 6.3 выбирают допустимую индукцию BZ2 в
зубце и по формуле (7.14) определяют ширину нижней части зубца bZ2Н (рис. 7.7). Размер b1Н, мм, нижней части паза:
рис. 7.7, а
(7.55)
b1Н ( D2 2 hS 2 / 2 hВ ) z2 bZ 2 Н ;
рис. 7.7, б
b1Н [ ( D2 2 hS 2 / 2 hВ ) z2 bZ 2 Н ] ( z2 ) ,
(7.56)
где все размеры в миллиметрах.
Ширину верхней части паза принимают bВ = (0,45–0,6)b1Н. В
машинах с высотой оси вращения h ≤ 355 мм bВ = 4–6 мм, большие
значения bВ соответствуют двигателям больших мощностей.
Требуемое сечение нижней части стержня
qСН qC qСВ ,
(7.57)
где сечение верхней части стержня
qСВ bВ (hВ 0,11 bВ ) .
(7.58)
Диаметр b2Н, мм, нижней части паза:
рис. 7.7, а
[b12H ( 2 z2 ) 4 qCH ] ( z2 ) ;
(7.59)
[b12H ( 2 z2 ) 4 qCH ] ( z2 2) ,
(7.60)
b2 H
рис. 7.7, б
b2 H
где qСН – сечение нижней части стержня, мм2; размеры в миллиметрах.
Глубина нижней части паза без учета закруглений
h1H z2 (b1H b2 H ) (2 ) .
(7.61)
По условиям качественной заливки пазов алюминием наименьший допустимый диаметр b2Н = 3–4 мм. Если найденный по формулам (7.59), (7.60) диаметр b2Н < 3 мм, то следует уменьшить сечение
стержня qC, увеличив плотность тока J2 в нем, или уменьшить ширину зубца bZ2H, увеличив индукцию в зубце BZ2, или изменить обе
величины и уточнить размеры нижней части паза.
Допустимо просто увеличить диаметр b2H до минимально допустимого значения. При этом нарушается параллельность стенок
150
Допустимо просто увеличить диаметр b2Н до минимально допустимого значения. При этом нарушается параллельность стенок
зубца. Поэтому определяют ширину нижней наиболее узкой части
зубца bZ2Н //, мм, для пазов:
рис. 7.7, а
(7.62)
bZ 2 Н // ( D2 2 hS 2 / 2 hB 2 h1H ) z2 b2 H ;
рис. 7.7, б
(7.63)
bZ 2 Н // ( D2 2 hS 2 / 2 hB b1H 2 h1H ) z2 b2 H ,
и максимальную индукцию BZ2MAX в наиболее узком сечении зубца
по формуле (7.47), подставив в формулу bZ2Н // вместо bZ2 //. В формулах (7.62), (7.63) все размеры даны в миллиметрах,
Найденная по формуле (7.47) индукция BZ2MAX не должна превышать максимально допустимое значение индукции в зубце ротора
в табл. 6.3.
Размеры нижней части паза следует корректировать пока диаметр b2Н и индукция BZ2MAX не войдут в допустимые пределы.
Размеры паза округляют до десятых долей миллиметра и определяют глубину паза hП2, мм:
рис. 7.7, а
hП 2 0,5 b2 H h1H hB hS 2 / ;
(7.64)
рис. 7.7, б
(7.65)
hП 2 0,5(b1H b2 H ) h1H hB hS 2 / ,
где все размеры в миллиметрах.
Фактическое сечение стержня, мм2,
qC qCB qCH ,
(7.66)
2
здесь сечение верхней части стержня qСВ, мм , определяется по формуле (7.58); сечение нижней части qСН, мм2, определяется по формуле (7.49) при подстановке в нее b1 = b1H, b2 = b2H, h1 = h1H.
7.3. Сердечники роторов
Внутренний диаметр насаживаемого непосредственно на вал
сердечника ротора Dj равен диаметру вала DB, который определяется приближенно:
DB K B DA ,
(7.67)
значения коэффициента KB даны в табл. 7.4.
151
Таблица 7.4
h, мм
2р
KB
Значения коэффициента KB в формуле (7.67)
45 – 63
71 – 250
280 – 355
2–6
2–8
2
4 – 12
0,19
0,23
0,22
0,23
Стандартизованные диаметры валов роторов в зависимости от
высоты оси вращения и числа полюсов машины даны в табл. 4.18.
Для лучшего охлаждения в сердечниках роторов большинства
двигателей с высотой оси вращения h ≥ 250 мм выполняют аксиальные каналы между зубцовой зоной и отверстием для вала (рис. 3.5,
3.6, 3.10, 3.13). В машинах с h ≤ 355 мм каналы располагают в один
ряд, обычно число каналов mК2 = 12 при h = 280–355 мм и mК2 = 10
при h = 250 мм; диаметр канала dК2 = 24–32 мм. Большие диаметры dК2 относятся к двигателям с большим числом полюсов: при
2р ≥ 4 и h ≥ 315 мм dК2 = 32 мм.
Такие же аксиальные каналы выполняют и в сердечниках роторов длиной более 0,25–0,3 м с радиальными охлаждающими каналами. Аксиальные каналы служат для прохода охлаждающего воздуха к радиальным каналам.
У двигателей с фазным ротором и аксиальной системой вентиляции в сердечниках роторов делают один ряд аксиальных каналов
(рис. 3.11) с числом каналов mК2 = 10–12 и диаметром dК2 = 15–24 мм.
Наличие аксиальных каналов в ярме ротора необходимо учитывать при расчете магнитной цепи машины.
8. РАСЧЕТ МАГНИТНОЙ ЦЕПИ
8.1. Магнитная цепь асинхронной машины
Магнитной цепью машины называют элементы магнитопроводов (сердечников) и зазоры, по которым замыкается основной магнитный поток. Вследствие радиальной симметрии сердечников асинхронной машины магнитное поле каждой пары полюсов практически одинаково. Поэтому магнитную цепь (рис. 8.1) рассчитывают для
одной пары полюсов. Пунктирной линией на рисунке изображена
средняя силовая линия основного магнитного потока, вдоль которой
проводят расчет магнитной цепи.
Магнитную цепь пары полюсов условно делят на пять однородных последовательно соединенных участков с примерно постоянными индукцией и напряженностью магнитного поля (рис. 8.1).
152
На рисунке: 1 – воздушные зазоры; 2 – зубцы статора; 3 – зубцы ротора; 4 – ярмо
(спинка) статора; 5 – ярмо
2 (hZ1)
(спинка) ротора. В скобках
2 (hZ1)
указано обозначение длины
1 ( δ)
1 ( δ)
средней силовой линии соот3 (hZ2)
3 (hZ2)
ветствующего участка магнитной цепи.
5 (LJ)
Основной задачей расчета
магнитной цепи является определение намагничивающего
Рис. 8.1. Магнитная цепь пары
тока двигателя. Магнитную
полюсов асинхронного двигателя
цепь рассчитывают для режима холостого хода при номинальном напряжении. Ход расчета заключается в определении для
каждого участка площади поперечного сечения, магнитной индукции
и по ней расчетной напряженности магнитного поля, расчетной
средней длины силовой линии, магнитного напряжения участка. Затем рассчитывают суммарную МДС пары полюсов и намагничивающий ток обмотки статора.
Вследствие малого воздушного зазора в асинхронных машинах
относительно велико насыщение зубцов статора и ротора, что приводит к несинусоидальности (уплощению) распределения индукции
в зазоре машины. Уплощение кривой магнитного поля учитывают
коэффициентами полюсного перекрытия αδ и формы поля kВ.
Для упрощения расчет магнитной цепи проводят по основной
гармонической магнитного потока, в соответствии с этим магнитная
индукция в зазоре Вδ принимается равной амплитуде первой гармонической индукции Вδ1m. Коэффициенты αδ и kВ принимают для синусоидальной функции αδ = 2/π ≈ 0,64; kВ = π/(2√2) ≈ 1,11. Напряженности магнитного поля в ферромагнитных участках магнитной цепи
определяют с помощью таблиц и графиков намагничивания стали
для зубцов и ярм, рассчитанных с учетом уплощения кривой индукции в зазоре машины по уточненному методу Пунга /1, 5, 6/.
Магнитную цепь рассчитывают по окончательно выбранным в
главах 5, 6, 7 размерам сердечников пазов статора и ротора; числу
последовательно соединенных витков фазы w1 и найденному для
выбранного типа обмотки обмоточному коэффициенту kО1.
D2
DJ =DB
D1
DA
4 (LА)
153
8.2. Магнитное напряжение зазора
По формулам (6.15), (6.16) рассчитывают магнитную индукцию
в зазоре Bδ, Тл, и определяют магнитное напряжение зазора на пару полюсов, А,
F 2 B k 0 ,
(8.1)
здесь Bδ – индукция, Тл; δ – зазор, м; магнитная проницаемость ваку–7
ума μ0 = 4π ·10
Г/м; коэффициент воздушного зазора, учитывающий влияние зубчатости сердечников статора и ротора на магнитное сопротивление зазора:
k k 1 k 2 ,
(8.2)
где kδ1, kδ2 – коэффициенты, учитывающие соответственно зубчатость
сердечников статора и ротора.
При полузакрытых (рис. 6.4) и полуоткрытых (рис. 6.5) пазах
статора
(8.3)
1 (bS1 ) 2 (5 bS1 ) ,
k 1 t Z1 (t Z1 1 )
(8.4)
и полузакрытых пазах (рис. 7.1; 7.2; 7.5, а) ротора
2 (bS 2 ) 2 (5 bS 2 ) ,
k 2 t Z 2 (t Z 2 2 ) ,
(8.5)
(8.6)
где tZ1, bS1 и tZ2, bS2 – соответственно зубцовое деление и ширина
шлица пазов статора и ротора, мм.
При закрытых пазах ротора (рис. 7.5, б, в; 7.6; 7.7) bS2 = 0 и
kδ2 = 1. В двигателях малой и средней мощности kδ = 1,1–1,45; большие значения соответствуют машинам малой мощности с относительно небольшим зазором.
8.3. Магнитное напряжение зубцовой зоны статора
Магнитное напряжение зубцовой зоны статора, А,
FZ1 2 hZ1 H Z1 ,
(8.7)
здесь расчетная высота зубца статора hZ1, м, и расчетная напряженность магнитного поля в зубце HZ1, А/м, определяются в зависимости от формы зубцов и пазов статора.
154
Трапецеидальные полузакрытые пазы и зубцы постоянной или
мало изменяющейся ширины (рис. 6.4)
Расчетная высота, мм, зубца статора (рис. 8.1)
hZ1 hП1 hS1 hК hПО / hП .
(8.8)
Ширина верхней и нижней части зубца статора, мм:
bZ1/ ( D1 2 hS1 2 hК ) z 1 b1 ;
(8.9)
bZ1// ( D 1 2 hП1 ) z 1 b2 .
(8.10)
В формулах (8.8)–(8.10) окончательно принятые в главе 6 размеры
зубцовой зоны (рис. 6.4) в миллиметрах; z1 – число пазов статора.
Если bZ1/ = bZ1//, то считают расчетную ширину зубца bZ1 = bZ1/.
При разнице | bZ1/ – bZ1//| ≤ 0,5 мм принимают bZ1 = 0,5( bZ1/ + bZ1//). Далее определяют индукцию в зубце по формуле (8.11).
При различии размеров | bZ1/ – bZ1//| > 0,5 мм дальнейший расчет
проводят по формулам (8.19)–(8.24) для зубцов переменной ширины, приняв в этих формулах размеры bZ1MAX и bZ1MIN равными соот/
ветственно большему и меньшему из размеров bZ1 и bZ1// (смотри
следующий пункт). При этом максимальную индукцию BZ1MAX определяют по формуле (8.11), подставляя в нее bZ1MIN вместо bZ1. В формулах (8.22), (8.23) следует принять расчетные размеры bП1PAC = b1,
bП1PAC / = b2 при более широкой верхней части зубца (bZ1/ > bZ1//) и
bП1PAC = b2, bП1PAC / = b1 при более широком основании (bZ1 // > bZ1 /).
С достаточной для практики точностью при | bZ1/ – bZ1//| > 0,5 мм
магнитное напряжение зубцов статора рассчитывают по индукции,
определяемой на расстоянии 1/3 высоты зубца от его наиболее узкой части (смотри ниже в этом пункте).
Индукция в зубце статора, Тл,
BZ1 B l tZ1 (bZ1 lСТ 1 kС1 ) ,
(8.11)
где Вδ – индукция в зазоре, Тл; kС1 – коэффициент заполнения сердечника сталью по табл. 6.2; размеры даны в одних единицах длины.
Если найденная по формуле (8.11) индукция BZ1 ≤ 1,8 Тл, то
расчетную напряженность магнитного поля HZ1 в зубце определяют
по табл. 8.1–8.3 намагничивания зубцов из выбранной в параграфе 4.2 марки стали для сердечника статора. Магнитное напряжение
зубцов статора рассчитывают по формуле (8.7).
155
Таблица 8.1
Кривая намагничивания для зубцов (сталь марки 2013)
В,
Тл
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
2,1
2,2
2,3
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
256
259
262
265
268
271
274
277
280
283
286
290
293
297
301
304
308
312
316
320
324
329
333
338
342
346
350
355
360
365
370
375
380
385
391
396
401
406
411
417
424
430
436
442
448
455
461
467
473
479
486
495
504
514
524
533
563
574
584
585
586
598
610
622
634
646
658
670
683
696
709
722
735
749
763
777
791
805
820
835
850
878
906
934
962
990 1020 1050 1080 1110
1150 1180 1220 1250 1290 1330 1360 1400 1440 1480
1520 1570 1620 1670 1720 1770 1830 1890 1950 2010
2070 2160 2250 2340 2430 2520 2640 2760 2890 3020
3150 3320 3500 3680 3860 4040 4260 4480 4700 4920
5140 5440 5740 6050 6360 6670 7120 7570 8020 8470
8920 9430 9940 10460 10980 11500 12000 12600 13200 13800
14400 15100 15800 16500 17200 18000 18800 19600 20500 21400
Таблица 8.2
Кривая намагничивания для зубцов (сталь марок 2212, 2214, 2312)
В,
Тл
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
2,1
2,2
2,3
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
292
297
302
306
311
316
322
326
331
337
342
347
353
360
366
372
379
384
390
396
403
409
417
425
433
440
450
460
470
477
488
497
509
517
527
537
547
559
570
582
593
602
613
626
638
651
663
677
695
710
724
738
755
770
790
804
820
840
857
879
897
917
936
955
977 1000 1020 1040 1060 1090
1120 1150 1170 1210 1240 1270 1310 1330 1370 1410
1450 1490 1530 1560 1610 1650 1690 1750 1790 1840
1900 1940 2000 2070 2140 2220 2300 2380 2500 2600
2700 2800 2920 3050 3220 3330 3490 3610 3710 4000
4160 4350 4600 4800 5030 5330 5430 5790 6130 6420
6750 7170 7400 7790 8150 8520 9000 9400 9750 10200
10600 11000 11500 12100 12600 13000 13500 14100 14700 15400
15900 16500 17300 17800 18500 19100 19600 20300 21100 22000
23100 24300 25500 26800 28100 29500 30900 32400 33900 36400
156
Таблица 8.3
Кривая намагничивания для зубцов (сталь марки 2412)
В,
Тл
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
2,1
2,2
2,3
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
122
124
126
128
130
132
134
136
138
140
142
144
147
149
151
155
158
160
163
165
168
171
175
177
180
184
188
191
196
200
204
207
212
216
222
227
232
237
242
247
254
259
265
272
277
284
291
298
307
316
323
333
341
351
361
372
383
394
404
421
425
432
461
480
497
518
537
554
573
596
622
644
673
700
728
756
795
828
859
890
932
976 1020 1070 1130 1180 1260 1350 1440 1520
1630 1740 1870 2020 2130 2300 2450 2630 2830 3040
3190 3410 3590 3830 4100 4400 4600 4800 5100 5400
5700 5900 6300 6600 6900 7200 7700 8100 8300 8700
9200 9700 10000 10500 10900 11400 12000 12700 13100 13700
14200 15000 15800 16500 17200 17900 18700 19800 20600 21600
22600 23700 24600 26100 26900 28700 30000 31400 33200 35400
37600 39900 42200 44600 47000 49500 52000 54600 57200 59800
При BZ1 > 1,8 Тл расчетную напряженность поля HZ1 определяют
с учетом ответвления части магнитного потока в пазы на расстоянии, равном 1/3 высоты зубца от наиболее узкой его части.
Ширину зубца, мм, и коэффициент kП1 (1/3), учитывающий ответвление магнитного потока в паз, определяют на расстоянии, равном
1
/3 высоты зубца от коронки при постоянной ширине зубца (bZ1/ =
bZ1//) и более узкой верхней части зубца (bZ1/ < bZ1//):
bZ1(1 3) bZ1/ (bZ1// bZ1/ ) 3 ;
(8.12)
k П1(1 3) l [b1 (b 2 b1 ) 3] [bZ1(1 3) lСТ 1 kC1 ] ;
(8.13)
2
/3 высоты зубца от коронки или 1/3 высоты зубца от основания
при более узком основании зубца (bZ1// < bZ1/):
bZ1( 2 3) bZ1// (bZ1/ bZ1// ) 3 ;
(8.14)
k П1( 2 3) l [b 2 (b 2 b1 ) 3] [bZ1( 2 3) lСТ 1 kC1 ] ,
(8.15)
здесь все размеры даны в миллиметрах; занятая проводом обмотки
часть высоты паза (рис. 6.4), мм,
157
hПО hПО / hП ,
(8.16)
где hПО /, ΔhП – размеры, мм, определены при расчете зубцовой зоны
статора (глава 6).
Индукцию BZ1 (1/3) или BZ1 (2/3) рассчитывают по формуле (8.11),
принимая расчетную ширину зубца bZ1 равной bZ1 (1/3) или bZ1 (2/3) в
зависимости от соотношения размеров коронки и основания зубца.
Если расчетная индукция BZ1 (1/3) или BZ1 (2/3) не превышает 1,8 Тл,
то расчетную напряженность поля HZ1 определяют по таблицам намагничивания зубцов (табл. 8.1–8.3) для выбранной марки стали сердечника статора. При расчетной индукции более 1,8 Тл напряженность поля HZ1 определяют по найденной индукции и коэффициентам kП1(1/3), kП1(2/3) с помощью кривых намагничивания зубцов
(рис. 8.2, 8.3) из выбранной марки стали сердечника статора.
Магнитное напряжение зубцов FZ1 определяют по формуле (8.7).
Полузакрытые прямоугольные пазы и зубцы переменной ширины
(рис. 6.5)
Расчетная высота зубца hZ1 равна глубине паза hП1, найденной
по окончательным размерам паза с помощью формулы (6.51).
Ширина коронки bZ1MIN и основания bZ1MAX зубца, мм:
bZ1MIN ( D1 2 hS1 2 hК ) z1 bП1 ;
(8.17)
bZ1MAX ( D1 2 hП1 ) z1 bП1 ,
(8.18)
где z1 – число пазов статора; окончательно принятые в разделе 6
размеры зубцовой зоны (рис. 6.5) даны в миллиметрах.
Расчетную напряженность магнитного поля HZ1 в зубце переменной ширины определяют как среднюю для трех сечений зубца по
1
формуле Симпсона (8.21) или в сечении на расстоянии /3 высоты
зубца hZ1(1/3) от наиболее узкой его части – коронки (рис. 6.5).
В первом случае рассчитывают в трех сечениях зубца (рис. 6.5)
индукцию магнитного поля, Тл: BZ1MAX – в наиболее узком месте – у
коронки шириной bZ1MIN по формуле (6.60); BZ1MIN – в наиболее широком месте – в основании зубца шириной bZ1MAX
BZ1MIN BZ1MAX bZ1MIN bZ1MAX ;
(8.19)
BZ1СР – в среднем сечении зубца
BZ1CP 0,5 ( BZ1MAX BZ1MIN ) .
(8.20)
158
BZ, Тл
kП = 3,0
2,8 2,4 2,0 1,6
1,2
0,8
2,5
0,4
2,4
kП = 0
2,3
2,2
2,1
2,0
1,9
1,8
–4
0
0,5
1,0
1,5
2,0 HZ·10 ,А/м
Рис. 8.2. Кривые намагничивания стали 2013 (для определения
магнитного напряжения зубцовой зоны асинхронных двигателей)
BZ, Тл
2,5
2,4
2,8 2,4 2,0
kП = 3,0
1,6 1,2
0,8
0,4
kП = 0
2,3
2,2
2,1
2,0
1,9
1,8
–4
0
1,0
2,0
3,0
4,0 HZ·10 ,А/м
Рис. 8.3. Кривые намагничивания сталей 2211, 2312, 2411 (для определения магнитного напряжения зубцовой зоны асинхронных двигателей)
159
При расчетных индукциях BZ1MAX, BZ1MIN, BZ1CP не более 1,8 Тл
напряженность магнитного поля HZ1MAX, HZ1MIN, HZ1CP в этих сечениях
зубца определяют по табл. 8.1–8.3 намагничивания зубцов из выбранной в параграфе 4.2 марки стали сердечника статора.
Расчетная напряженность магнитного поля в зубце, А/м,
H Z1 ( H Z1MAX 4H Z1CP H Z1MIN ) 6 .
(8.21)
Магнитное напряжение зубцов FZ1 находят по формуле (8.7).
Если в каком-либо из рассматриваемых сечений зубца или во
всех этих сечениях расчетная индукция превышает 1,8 Тл, то определяют коэффициент kП, учитывающий ответвление потока в пазы,
в соответствующем сечении:
с BZ1MIN
k П1MIN bП1PAC l (bZ1MAX lCT 1 kC1 ) ;
(8.22)
k П1MAX bП1PAC / l (bZ1MIN lCT 1 kC1 ) ,
(8.23)
k П1CP 0,5 (k П1MAX k П1MIN ) ,
(8.24)
с BZ1MAX
с BZ1CP
где bП1РАС = bП1РАС / = bП1 – расчетная ширина прямоугольного паза
статора (рис. 6.5).
Напряженность магнитного поля в рассматриваемом сечении
зубца определяют по найденным индукции и коэффициенту kП с
помощью кривых намагничивания зубцов (рис. 8.2, 8.3).
Расчетную напряженность магнитного поля HZ1 в зубце определяют по формуле (8.21), магнитное напряжение зубцовой зоны статора FZ1 рассчитывают по формуле (8.7).
Для определения расчетной напряженности магнитного поля в
зубце HZ1(1/3) на расстоянии 1/3 высоты зубца от коронки рассчитывают ширину зубца в рассматриваемом сечении
bZ1(1 3) ( D1 2 hП1 3) z1 bП1.
(8.25)
Магнитную индукцию BZ1(1/3) в зубце определяют по формуле (8.11), приняв в формуле bZ1 = bZ1(1/3). При BZ1(1/3) ≤ 1,8 Тл напряженность магнитного поля HZ1(1/3) определяют по табл. 8.1–8.3 намагничивания зубцов из выбранной для сердечника статора марки
160
стали. Если BZ1(1/3) > 1,8 Тл, то для расчетного сечения определяют
коэффициент, учитывающий ответвление магнитного потока в пазы,
k П1(1 / 3) bП1 l [bZ1(1 / 3) lCT 1 kC1 ] ,
(8.26)
и находят HZ1(1/3) по кривым намагничивания зубцов (рис. 8.2, 8.3)
из соответствующей марки стали.
Магнитное напряжение зубцовой зоны статора определяют по
формуле (8.7) для расчетной напряженности поля HZ1 = HZ1(1/3).
8.4. Магнитное напряжение зубцовой зоны ротора
Магнитное напряжение зубцовой зоны ротора, А,
FZ 2 2 hZ 2 H Z 2 ,
(8.27)
здесь расчетную высоту зубца ротора hZ2, м, и расчетную напряженность магнитного поля в зубце HZ2, А/м, определяют в зависимости
от формы зубцов и пазов ротора.
Трапецеидальные полузакрытые или закрытые пазы и зубцы
постоянной или мало изменяющейся ширины (рис. 7.1, 7.5)
Расчетная высота, мм, зубцовой зоны ротора (рис. 8.1) с пазами: с плоским дном (рис. 7.1, а) hZ2 = hП2; с закругленным дном
(рис. 7.1, б; 7.5)
hZ 2 hП 2 0,1b2 ,
(8.28)
здесь hП2 – глубина паза, мм, определяемая по окончательным размерам зубцовой зоны с помощью формул (7.15), (7.16), (7.48) для пазов
по рис. 7.1, а; 7.1, б; 7.5 соответственно; размер b2 дан в миллиметрах.
Ширина, мм, верхней части зубца ротора:
по рис. 7.1
bZ 2 / ( D2 2 hS 2 2 hК ) z2 b1 ;
(8.29)
по рис. 7.5
bZ 2 / ( D2 2 hS 2 2 hS 2 / b1 ) z2 b1 ,
нижней части зубца ротора:
по рис. 7.1, а
bZ 2 // ( D2 2 hП 2 ) z2 b2 ;
по рис. 7.1, б; 7.5
(8.30)
(8.31)
161
bZ 2 // [ D2 2 hП 2 b2 ] z2 b2 ,
(8.32)
где z2 – число пазов ротора; окончательно выбранные в главе 7 размеры зубцовой зоны ротора приведены в миллиметрах. При расчетах по формуле (8.30) hS2 / = 0 для пазов по рис. 7.5, а и hS2 = 0 для
пазов по рис. 7.5, в.
Если bZ2 / = bZ2 //, то считают расчетную ширину зубца bZ2 = bZ2 /.
При разнице | bZ2 / – bZ2 //| ≤ 0,5 мм принимают bZ2 = 0,5∙| bZ2 / – bZ2 //|.
Далее определяют индукцию в зубце по формуле (8.33).
При различии | bZ2 / – bZ2 //| > 0,5 мм дальнейший расчет проводят
по формулам (8.38)–(8.43) для зубцов переменной ширины, приняв
в этих формулах размеры bZ2MAX и bZ2MIN равными соответственно
/
большему и меньшему из размеров bZ2 и bZ2 // (смотри следующий
пункт). При этом максимальную индукцию BZ2MAX определяют, подставляя в формулу (8.33) bZ2MIN вместо bZ2. В формулах (8.41), (8.42)
принимают расчетные размеры bП2PAC = b1, bП2PAC / = b2 при более
широкой верхней части зубца (bZ2 / > bZ2 //) и bП2PAC = b2, bП2PAC / = b1
при более широком основании зубца (bZ2 // > bZ2 /).
При | bZ2 / – bZ2 //| > 0,5 мм магнитное напряжение зубцов часто
рассчитывают по индукции, определяемой на расстоянии 1/3 высоты
зубца от наиболее узкой его части (смотри ниже в этом пункте).
Индукция в зубце ротора, Тл,
BZ 2 B l tZ 2 (bZ 2 lСТ 2 kС 2 ) ,
(8.33)
где Вδ – индукция в зазоре, Тл; kС2 – коэффициент заполнения сердечника сталью по табл. 6.2; размеры даны в одних единицах длины.
Если найденная по формуле (8.33) индукция BZ2 ≤ 1,8 Тл, то расчетную напряженность магнитного поля HZ2 в зубце определяют по
табл. 8.1–8.3 намагничивания зубцов из выбранной в параграфе 4.2
марки стали сердечника ротора. Магнитное напряжение зубцов ротора FZ2 рассчитывают по формуле (8.27).
При BZ2 > 1,8 Тл расчетную напряженность поля HZ2 определяют
с учетом ответвления части магнитного потока в пазы на расстоянии, равном 1/3 высоты зубца от наиболее узкой его части.
Ширину зубца, мм, и коэффициент kП2, учитывающий ответвление магнитного потока в паз, определяют на расстоянии, равном
1
/3 высоты зубца от его основания при постоянной ширине (bZ2 / =
bZ2 //) и более узкой нижней части зубца (bZ2 / > bZ2 //):
162
bZ 2 (1 3) bZ 2 // (bZ 2 / bZ 2 // ) 3 ;
(8.34)
k П 2 (1 3) l [b 2 (b1 b 2 ) 3] [bZ 2 (1 3) lСТ 2 kC 2 ] ,
(8.35)
2
/3 высоты зубца от основания или 1/3 высоты зубца от коронки
при более широком основании зубца (bZ2// > bZ2/):
bZ 2 ( 2 3) bZ 2 / (bZ 2 // bZ 2 / ) 3 ;
(8.36)
k П 2( 2 3) l [b1 (b1 b 2 ) 3 ] [bZ 2 ( 2 3) lСТ 2 kC 2 ] ,
(8.37)
где все размеры в миллиметрах.
Индукцию BZ2 (1/3) или BZ2 (2/3) рассчитывают по формуле (8.33),
принимая расчетную ширину зубца bZ2 равной bZ2 (1/3) или bZ2 (2/3) в
зависимости от соотношения размеров коронки и основания зубца.
Если расчетная индукция BZ2 (1/3), BZ2 (2/3) ≤ 1,8 Тл, расчетную напряженность поля HZ2 определяют по таблицам намагничивания зубцов
(табл. 8.1–8.3). При индукциях BZ2 (1/3), BZ2 (2/3) > 1,8 Тл напряженность
поля HZ2 находят по кривым намагничивания зубцов (рис. 8.2, 8.3) с
учетом коэффициента kП2(1/3), kП2(2/3). Магнитное напряжение зубцовой зоны ротора FZ2 рассчитывают по формуле (8.27).
Полузакрытые прямоугольные (рис. 7.2), закрытые трапецеидальные
пазы с узкой верхней частью (рис. 7.6) и зубцы переменной ширины
Расчетная высота зубцовой зоны ротора (рис. 8.1) с пазами по
рис. 7.2 hZ2 = hП2; по рис. 7.6 определяется по формуле (8.28), где
hП2 – глубина паза, мм, определяемая с помощью формул (7.27), (7.48)
для окончательных размеров зубцовой зоны по рис. 7.2 и 7.6 соответственно.
Ширину bZ2MAX и bZ2MIN верхней и нижней частей зубца с прямоугольными пазами (рис. 7.2) определяют по формулам (8.29) при
b1 = bП2 и (7.29); с трапецеидальными (рис. 7.6) – по формулам (8.30)
при hS2 = 0 и (8.32). Размеры bZ2MAX и bZ2MIN рассчитывают по окончательно выбранным в главе 7 размерам зубцовой зоны ротора.
Расчетную напряженность магнитного поля HZ2 в зубце переменной ширины определяют как среднюю для трех сечений зубца
по формуле Симпсона (8.40) или в сечении, находящемся на рассто1
янии /3 высоты зубца hZ2(1/3) от наиболее узкой части зубца – его
основания (рис. 7.2, 7.6).
163
Для расчета напряженности магнитного поля по формуле (8.40)
определяют в трех сечениях зубца (рис. 7.2, 7.6) индукцию магнитного поля, Тл: BZ2MAX в наиболее узком месте – основании зубца с
шириной bZ2MIN по формуле (7.30); BZ2MIN в наиболее широком месте
– у коронки зубца шириной bZ2MAX
BZ 2MIN BZ 2MAX bZ 2MIN bZ 2MAX ;
(8.38)
BZ2СР в среднем сечении зубца
BZ 2CP 0,5 ( BZ 2MAX BZ 2MIN ) .
(8.39)
При расчетных индукциях BZ2MAX, BZ2MIN, BZ2CP не более 1,8 Тл
напряженность магнитного поля HZ2MAX, HZ2MIN, HZ2CP в рассматриваемых сечениях зубца определяют по табл. 8.1–8.3 намагничивания
зубцов из стали, выбранной для сердечника ротора.
Расчетная напряженность магнитного поля в зубце, А/м,
H Z 2 ( H Z 2MAX 4 H Z 2CP H Z 2MIN ) 6 .
(8.40)
Магнитное напряжение зубцов FZ2 находят по формуле (8.27).
Если в каком-либо из рассматриваемых сечений зубца или во
всех этих сечениях расчетная индукция превышает 1,8 Тл, то определяют коэффициент kП, учитывающий ответвление потока в пазы,
для соответствующего сечения:
с BZ2MIN
k П 2MIN bП 2 PAC l (bZ 2MAX lCT 2 kC 2 ) ,
(8.41)
с BZ2MAX
(8.42)
k П 2 MAX bП 2 PAC / l (bZ 2 MIN lCT 2 kC 2 ) ,
с BZ2CP
k П 2CP 0,5 (k П 2MAX k П 2MIN ) ,
(8.43)
здесь расчетные размеры bП2РАС = bП2 , bП2РАС / = bП2 для пазов по
рис. 7.2; bП2РАС = b1 , bП2РАС / = b2 для пазов по рис. 7.6.
Напряженность магнитного поля в рассматриваемом сечении
зубца определяют по найденным индукции и коэффициенту kП с
помощью кривых намагничивания зубцов (рис. 8.2, 8.3) из выбранной ранее марки стали сердечника ротора.
Расчетную напряженность магнитного поля HZ2 в зубце определяют по формуле (8.40), магнитное напряжение зубцовой зоны
ротора FZ2 рассчитывают по формуле (8.27).
164
Чтобы найти расчетную напряженности магнитного поля в зубце HZ2(1/3) на расстоянии 1/3 высоты зубца от его основания, рассчитывают ширину зубца в рассматриваемом сечении, мм, для зубцовой зоны ротора с прямоугольными пазами (рис. 7.2)
bZ 2(1 3) ( D2 4 hП 2 3) z2 bП 2 ;
(8.44)
с трапецеидальными пазами (рис. 7.6)
bZ 2(1 / 3) bZ 2MIN (bZ 2MAX bZ 2MIN ) 3 ,
(8.45)
где все размеры зубцовой зоны ротора приведены в миллиметрах.
Магнитную индукцию BZ2(1/3) в зубце определяют по формуле
(8.33), приняв в формуле bZ2 = bZ2(1/3). При BZ2(1/3) ≤ 1,8 Тл напряженность магнитного поля HZ2(1/3) определяют по табл. 8.1–8.3 намагничивания зубцов. При BZ2(1/3) > 1,8 Тл определяют коэффициент kП2(1/3),
учитывающий ответвление магнитного потока в паз, для расчетного
сечения зубцовой зоны с прямоугольными пазами (рис. 7.2)
k П 2(1 / 3) bП 2 l [bZ 2(1 / 3) lCT 2 kC 2 ] ;
(8.46)
с трапецеидальными пазами (рис. 7.6)
k П 2(1 / 3)
l { [ D2 4 (hП 2 0,5 b2 ) 3] z2 bZ 2(1 / 3) }
bZ 2(1 / 3) lCT 2 kC 2
(8.47)
и находят HZ2(1/3) по кривым намагничивания зубцов (рис. 8.2, 8.3).
Магнитное напряжение зубцовой зоны ротора определяют по
формуле (8.27) для расчетной напряженности поля HZ2 = HZ2(1/3).
Закрытые лопаточные пазы и зубцы переменной ширины (рис. 7.7)
Магнитное напряжение зубцовой зоны ротора с лопаточными
пазами определяют суммированием магнитных напряжений верхней
FZ2B и нижней FZ2H частей зубца
FZ 2 FZ 2 B FZ 2 H .
(8.48)
Магнитные напряжения верхней и нижней частей зубца, А,
FZ 2 B hZ 2 B H Z 2 B ;
FZ 2 H hZ 2 H H Z 2 H ,
(8.49)
(8.50)
здесь HZ2B, HZ2H – расчетные напряженности магнитного поля, А/м;
165
расчетная высота, м, верхней части зубца
hZ 2 В hB hS 2 / ;
расчетная высота, м, нижней части зубца зубцовой зоны:
по рис. 7.7, а
hZ 2 H h1H 0,4 b2 H ;
по рис. 7.7, б
hZ 2 H 0,5 b1H h1H 0,4 b2 H .
(8.51)
(8.52)
(8.53)
Вследствие значительной ширины верхней части зубца индукция в ней обычно не превышает 1,8 Тл, и с достаточной точностью
магнитную индукцию определяют в сечении, находящемся на рас1
стоянии /3 от основания, или в среднем сечении верхней части зубца с шириной bZ2B (1/3) или bZ2B, мм, соответственно
bZ 2 B(1 / 3) bZ 2MIN (bZ 2MAX bZ 2MIN ) 3 ;
(8.54)
bZ 2 B 0,5 ( bZ 2MAX bZ 2MIN ) ,
(8.55)
где максимальная ширина верхней части зубца, мм,
bZ 2 MAX ( D2 2 hS 2 / bB ) z2 bB ;
(8.56)
минимальная ширина верхней части зубца, мм,
bZ 2MIN ( D2 2 hS 2 / 2 hB ) z2 bB .
(8.57)
В формулах (8.54)–(8.57) используют определенные в главе 7
окончательные размеры зубцовой зоны, мм.
Магнитную индукцию BZ2B (1/3) или BZ2B в соответствующем сечении верхней части зубца рассчитывают по формуле (8.33) с заменой bZ2 на bZ2B (1/3) или bZ2B. При индукциях BZ2B (1/3), BZ2B ≤ 1,8 Тл расрасчетную напряженность HZ2B магнитного поля определяют по
табл. 8.1–8.3, при индукциях свыше 1,8 Тл – по кривым (рис. 8.2, 8.3)
намагничивания зубцов, определив предварительно коэффициент,
учитывающий ответвление потока в паз для соответствующего расчетного сечения зубца:
шириной bZ2B (1/3)
k П 2 B(1 / 3) bB l [ bZ 2 B(1 / 3) lCT 2 kC 2 ] ;
(8.58)
k П 2 B bB l [ bZ 2 B lCT 2 kC 2 ] .
(8.59)
шириной bZ2B
166
Магнитное напряжение FZ2B верхней части зубца рассчитывают
по формуле (8.49).
Для расчета магнитного напряжения FZ2H нижней части зубца
определяют размер bZ2H /, мм, зубцовой зоны:
по рис. 7.7, а
(8.60)
bZ 2 H / ( D2 2 hS 2 / 2 hB ) z2 b1H ;
по рис. 7.7, б
bZ 2 H / ( D2 2 hS 2 / 2 hB b1H ) z2 b1H .
(8.61)
Ширину bZ2H // основания нижней части зубца определяют по
формулам (7.62), (7.63).
При bZ2Н / = bZ2Н // принимают расчетную ширину нижней части
зубца ротора bZ2 = bZ2Н /. Если | bZ2Н / – bZ2Н //| ≤ 0,5 мм, то считают
bZ2Н = 0,5|bZ2Н / – bZ2Н //|. Далее определяют индукцию в зубце по формуле (8.33), приняв в формуле bZ2 = bZ2Н.
При разнице | bZ2Н / – bZ2Н //| > 0,5 мм дальнейший расчет проводят
по формулам (8.38)–(8.43) для зубцов переменной ширины, приняв
в этих формулах размеры bZ2MAX и bZ2MIN равными соответственно
/
большему и меньшему из размеров bZ2Н и bZ2Н //. При этом максимальную индукцию BZ2MAX определяют по формуле (8.33), подставляя в нее bZ2MIN вместо bZ2. В формулах (8.41), (8.42) принимают расчетные размеры bП2PAC = b1Н, bП2PAC / = b2Н при bZ2Н / > bZ2Н //; bП2PAC = b2Н,
bП2PAC / = b1Н при bZ2Н // > bZ2Н /.
При | bZ2Н / – bZ2Н //| > 0,5 мм допустимо определять магнитное напряжение нижней части зубцов по индукции, найденной на расстоянии 1/3 высоты нижней части зубца от наиболее узкой части зубца
(смотри ниже в этом пункте).
Если при | bZ2Н / – bZ2Н //| ≤ 0,5 мм найденная по формуле (8.33)
индукция BZ2Н ≤ 1,8 Тл, то расчетную напряженность магнитного поля HZ2Н в нижней части зубца определяют по табл. 8.1–8.3 намагничивания зубцов. Магнитное напряжение нижней части зубца ротора FZ2Н рассчитывают по формуле (8.50).
При BZ2Н > 1,8 Тл напряженность поля HZ2Н определяют с учетом
ответвления части магнитного потока в пазы на расстоянии, равном
1
/3 высоты нижней части зубца от наиболее узкой его части. Для
этого определяют ширину зубца и коэффициент, учитывающий ответвление потока в паз, по формулам (8.34)–(8.37), принимая в этих
формулах bZ2 / = bZ2Н /; bZ2 // = bZ2Н //; bZ2(1/3) = bZ2Н(1/3); bZ2(2/3) = bZ2Н(2/3).
167
Индукцию BZ2Н (1/3) или BZ2Н (2/3) в расчетном сечении определяют по формуле (8.33), принимая расчетную ширину зубца bZ2 равной bZ2Н (1/3) или bZ2Н (2/3). При индукциях BZ2Н (1/3), BZ2Н (2/3) ≤ 1,8 Тл
расчетную напряженность поля HZ2Н определяют по таблицам намагничивания зубцов (табл. 8.1–8.3). При индукциях BZ2Н (1/3), BZ2Н (2/3)
более 1,8 Тл напряженность поля HZ2Н находят по кривым намагничивания зубцов (рис. 8.2, 8.3) с учетом коэффициента kП2Н(1/3), kП2Н(2/3).
Магнитное напряжение нижней части зубцов ротора FZ2Н рассчитывают по формуле (8.50).
После расчета магнитных напряжений зазора Fδ, зубцов статора
FZ1 и ротора FZ2 определяют коэффициент насыщения зубцовой зоны
kZ ( FZ1 FZ 2 ) F .
(8.62)
Полученное значение kZ позволяет оценить правильность выбора основных размеров и обмоточных данных проектируемой машины. При чрезмерном насыщении зубцовой зоны kZ > 1,5–1,6; если
зубцовая зона мало использована или выбран излишне большой зазор между статором и ротором, то kZ < 1,2. В обоих случаях следует уточнить предыдущий расчет так, чтобы (1,5–1,6) > kZ ≥ 1,2.
8.5. Магнитное напряжение ярма (спинки) статора
Магнитное напряжение ярма статора, А,
FA LA H A ,
(8.63)
здесь HA – напряженность магнитного поля в ярме статора, А/м;
длина средней силовой линии в ярме статора (рис. 8.1), м,
LA ( DA hA ) (2 p) ,
(8.64)
где высота ярма, рассчитанная по найденным в главе 6 окончательным размерам зубцовой зоны статора, м,
hA ( DA D1 ) 2 hП 1 .
(8.65)
Индукция в ярме статора ВА, Тл,
BA Φ (2 hA lCT 1 kC1 ) ,
(8.66)
где Ф – магнитный поток, Вб; hA – высота ярма, м; lCT1 – длина стали
статора, м; kC1 – коэффициент заполнения статора сталью по табл. 6.2.
168
Для рассчитанной по формуле (8.66) индукции BA находят напряженность магнитного поля НА по табл. 8.4–8.6 намагничивания
ярма из выбранной марки стали сердечника статора.
8.6. Магнитное напряжение ярма (спинки) ротора
Магнитное напряжение ярма ротора, А,
FJ LJ H J ,
(8.67)
здесь HJ – напряженность магнитного поля в ярме ротора, А/м; длина средней силовой линии в ярме ротора (рис. 8.1), м, для машин с:
2р = 2
(8.68)
LJ 2 hJ ;
2р > 2
(8.69)
LJ ( DB hJ ) (2 p) ,
где DB – диаметр вала, м; hJ – рассчитанная по найденным в главе 7
окончательным размерам зубцовой зоны ротора высота ярма, м, при
непосредственной посадке сердечника ротора на вал
hJ 0,5 ( D2 DB ) hП 2 .
(8.70)
Таблица 8.4
Кривая намагничивания для ярма (сталь марки 2013)
В,
Тл
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
80
100
124
152
185
221
262
320
400
520
750
1150
2000
3570
5770
81
102
126
155
188
225
267
327
410
542
788
1220
2160
3800
6000
83
104
129
158
191
229
272
334
420
564
826
1290
2320
4030
6300
85
106
132
161
195
233
277
341
430
586
864
1360
2490
4260
6600
87
108
135
164
199
237
283
349
440
608
902
1430
2650
4490
7000
91
113
140
171
206
245
295
365
464
654
982
1600
2960
4930
7900
93
115
143
174
209
249
301
373
478
678
1020
1700
3110
5140
8400
95
118
146
177
213
253
307
382
492
702
1070
1800
3270
5350
9000
97
121
149
181
217
257
313
391
506
726
1110
1900
3420
5560
9700
89
111
138
168
203
241
289
357
450
630
940
1500
2810
4720
7400
169
Таблица 8.5
Кривая намагничивания для ярма (сталь марок 2212, 2214, 2312)
В,
Тл
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
131
134
136
139
141
144
147
150
153
156
159
162
166
169
172
176
180
183
186
190
194
198
201
204
208
212
216
220
223
227
231
235
239
243
248
252
255
260
265
269
274
279
284
289
295
300
305
311
318
323
332
338
344
351
357
367
374
382
390
398
410
418
426
435
444
455
466
475
487
498
509
521
533
546
558
572
585
600
618
635
656
675
695
717
740
763
789
815
843
870
905
934
965 1000 1040 1090 1130 1190 1240 1290
1370 1440 1520 1590 1660 1720 1820 1910 2010 2100
2180 2310 2410 2550 2610 2720 2840 2980 3130 3290
3460 3630 3800 3970 4140 4301 4490 4670 4850 5040
5220 5600 6000 6400 6900 7400 7900 8500 9100 9700
10400 11100 11800 12500 13300 14100 14900 15800 16700 17600
Таблица 8.6
Кривая намагничивания для ярма (сталь марки 2412)
В,
Тл
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
0
0,01
0,02
0,03
0,04 0,05
Н, А/м
0,06
0,07
0,08
0,09
63
64
65
66
67
68
69
69
70
71
72
72
73
74
75
76
76
77
78
79
81
82
83
84
85
87
88
90
92
94
96
98
100
102
104
105
107
109
112
114
116
118
121
124
126
129
132
136
139
143
146
150
154
158
162
167
172
176
182
188
192
198
204
210
216
222
230
238
246
260
272
288
300
316
330
340
358
370
386
399
410
440
460
490
530
570
610
660
710
770
820
890
960 1030 1100 1170 1230 1310 1400 1480
1560 1640 1730 1820 1920 2000 2100 2260 2440 2600
2800 2960 3100 3260 3400 3580 3740 3900 4100 4300
4500 4700 5000 5300 5500 5800 6100 6400 6800 7200
7600 8000 8500 9100 9700 10300 11100 11900 13100 14200
16000 18000 20000 22000 23800 25500 27600 29600 31500 33800
170
Индукция в ярме ротора, Тл,
BJ Φ (2 hJ / lCT 2 kC 2 ) ,
(8.71)
здесь Ф – магнитный поток, Вб; hJ / – расчетная высота ярма, м;
lCT2 – длина стали ротора, м; kC2 – коэффициент по табл. 6.2.
В двух- и четырехполюсных машинах с непосредственной посадкой сердечника ротора на вал расчетную высоту ярма hJ / определяют с учетом проникновения части магнитного потока в вал. В двигателях с числом полюсов 2р = 2, 2р = 4 при соотношении размеров
0,75 ( D2 2 hП 2 ) DB
(8.72)
hJ / [(2 p)(0,5 D2 hП 2 ) (3,2 p)] 2 d К 2 mК 2 3 .
(8.73)
расчетная высота ярма
В машинах с 2р = 4 при соотношении размеров, отличном от (8.72)
и с 2р ≥ 6
(8.74)
hJ / 0,5 ( D2 DB ) hП 2 2 d К 2 mК 2 3 .
В формулах (8.72)–(8.74) р – число пар полюсов; mК2, dК2 – выбранные в главе 7 число и диаметр аксиальных вентиляционных каналов
в ярме, при отсутствии вентиляционных каналов принимают mК2 = 0;
все размеры выражены в одних единицах измерения.
Для рассчитанной по формуле (8.71) индукции BJ находят напряженность магнитного поля НJ по табл. 8.4–8.6 намагничивания
ярма из выбранной марки стали сердечника ротора, после чего определяют магнитное напряжение ярма ротора FJ по формуле (8.67).
8.7. Намагничивающий ток двигателя
Суммарная МДС магнитной цепи на пару полюсов, А,
FЦ F FZ1 FZ 2 FA FJ .
(8.75)
Коэффициент насыщения магнитной цепи
k FЦ F .
(8.76)
Намагничивающий ток, А,
I p FЦ (0,9 m 1 w1 kO1 ) ,
(8.77)
171
в долях номинального тока (о.е.)
I* I I1H .
(8.78)
Значение I *μ позволяет оценить правильность расчета размеров
магнитопровода и выбора обмотки статора. Для большинства асинхронных двигателей средней мощности с хорошими технико-экономическими показателями 0,18 ≤ I *μ ≤ 0,3–0,4.
Расчетное значение I *μ < 0,18–0,2 указывает на то, что размеры
машины завышены, а активные материалы недоиспользованы. Для
такого двигателя характерны высокие КПД и Cosφ1 при большой
массе и габаритах.
Расчетное значение I *μ > 0,3–0,4 означает, что занижены основные размеры машины или неправильно выбраны размерные соотношения участков магнитопровода. Исключение составляют двигатели
мощностью менее 2–3 кВт, в которых I *μ достигает 0,5–0,6 вследствие относительно большого зазора между сердечниками и соответственно значительной МДС зазора Fδ.
9. ПАРАМЕТРЫ ДВИГАТЕЛЯ ДЛЯ НОМИНАЛЬНОГО
РЕЖИМА
9.1. Параметры (сопротивления) обмотки статора
Вследствие малых размеров элементарных проводников обмотки статора поверхностный эффект в них проявляется мало и активное сопротивление обмотки определяют без учета этого эффекта.
Активное сопротивление фазы статора, Ом,
r1 K R w1 lw1 (a1 qЭФ1 ) ,
(9.1)
здесь KR = 1 – коэффициент, учитывающий увеличение активного сопротивления вследствие неравномерного распределения тока по сечению провода за счет поверхностного эффекта; – удельное сопротивление, Омм, медных проводников при расчетной рабочей температуре определяют по табл. 9.1, (для обмоток статора с изоляцией класса нагревостойкости В принимают = 75 °С, класса нагревостойкости F принимают = 115 °С); w1 – число последовательно соединенных витков фазы; qЭФ1 – сечение эффективного проводника,
определенное по формуле (6.20) для окончательно выбранных числа
172
и размеров элементарных проводников, м2; a1 – число параллельных
ветвей фазы статора; lW1 – средняя длина витка обмотки статора, м.
Таблица 9.1
Удельное электрическое сопротивление металла обмоток
Тип обмотки
Материал
, Омм, при расчетной
рабочей температуре , °С
20
75
115
–
6
–
6
–6
Обмотка статора и
10
10
10
Медь
фазного ротора
57
47
41
–
6
–
6
–6
Короткозамкнутая литая Алюминий
10
10
10
обмотка ротора
30
24
22
Удельное сопротивление алюминия увеличивается вследствие
изменения структуры металла и образования воздушных включений
(раковин) при литье. Поэтому для литых алюминиевых обмоток
–6
–6
роторов = 10
/21,5 Омм при = 75 °С и = 10
/20,5 Омм
при = 115 °С.
Средняя длина витка lW1, м, равна сумме размеров прямых пазовых lП1= l1 и изогнутых лобовых lЛ1 частей катушки (рис. 9.1)
lW 1 2 (l1 l Л 1 ) ,
(9.2)
где l1 – длина статора, м; lЛ1 – расчетная длина лобовой части, м.
У всыпных обмоток из провода круглого сечения катушки выполняют с лобовыми частями прямоугольной формы (рис. 9.2, а).
При ручной укладке чаще применяют катушки с лобовыми частями
трапециевидной формы (рис. 9.2, б).
а)
б)
lП = l1(2)
lВЫЛ
bКТ
lЛ
lВЫЛ
bКТ
lЛ
lВЫЛ
lП = l1(2)
lВЫЛ
Рис. 9.1. Катушки однослойной (а) и двухслойной (б) обмоток
б)
α
lВЫЛ
а)
bКТ
lВЫЛ
173
bКТ
Рис. 9.2. Форма лобовых частей катушек всыпных обмоток при механизированной (а) и ручной (б) укладке
ширина, м, катушки обмотки статора
Основные размеры, м,
катушки всыпной обмотки
(рис. 9.1, 9.2): длина вылета
лобовой части lВЫЛ и длина
лобовой части lЛ
lВЫЛ k ВЫЛ bКТ ;
(9.3)
l Л k Л bКТ ,
(9.4)
здесь коэффициенты kВЫЛ и
kЛ – по табл. 9.2; bКТ – средняя
bКТ ( D1 hП1 ) yК z1 ,
(9.5)
где yК – шаг катушки в пазовых делениях, определяемый по формулам параграфа 4.3; D1 и hП1 – внутренний диаметр и глубина паза
статора, м; z1 – число пазов (зубцов) статора.
Таблица 9.2
К расчету размеров лобовых частей всыпных обмоток
2р
2
4
6
≥8
Лобовые части прямоуголь- Лобовые части трапециевидной
ной формы (рис. 9.2, а)
формы с α ≈ 20° (рис. 9.2, б)
kВЫЛ
kЛ
kВЫЛ
kЛ
0,27
1,35
0,35
1,4
0,31
1,40
0,40
1,5
0,40
1,55
0,45
1,6
0,52
1,65
0,60
1,9
Активное сопротивление всыпных обмоток статора рассчитывают по длине лобовой части lЛ1 средней катушки катушечной группы с шириной bКТ1, для чего в формуле (9.5) принимают yК равным
среднему шагу обмотки yК1 в пазовых делениях. Для всех однослойных, двухслойных равносекционных и двухслойных концентрических обмоток
yК1 y1Р ,
(9.6)
для одно-двухслойных концентрических обмоток
yК1 K y1P ,
(9.7)
здесь y1Р – расчетный шаг обмотки в пазовых делениях, определяе-
174
мый по формулам (6.10)–(6.13); K – коэффициент, учитывающий
уменьшение длины лобовой части средней катушки катушечной
группы одно-двухслойных обмоток, для наиболее распространенных
одно-двухслойных обмоток с одной большой катушкой (NБ = 1) значения коэффициента K приведены в табл. 9.3.
Таблица 9.3
Коэффициент К в формуле (9.7)
q1
3
4
5
6
Число катушек в катушечной группе
больших
малых
1
1
1
2
1
3
1
4
K
0,916
0,95
0,967
0,977
При расчете длины станины по формуле (4.3) для всех концентрических обмоток длину вылета лобовой части lВЫЛ1 определяют
по формуле (9.3) для самой широкой катушки с шириной bКMAX в
катушечной группе. Ширина этой катушки bКMAX определяется при
подстановке в формулу (9.5) вместо yК шага самой широкой (внешней) катушки, определяемого для выбранного типа обмотки статора
по формулам (4.16), (4.20), (4.22), (4.22, а).
У двухслойных равносекционных обмоток статора, намотанных
проводом прямоугольного сечения, с номинальным напряжением до
660 В включительно расчетная длина лобовой части катушки, м,
l Л 1 hП1 0,05 bКТ 1
1 [(bП1 0,0035 ) t Z1 ]2 ,
(9.8)
длина вылета лобовой части, м,
l ВЫЛ1 0,5 hП1 0,025
bКТ 1 (bП1 0,0035 ) t Z1
2
2 1 [(bП1 0,0035 ) t Z1 ]
,
(9.9)
где bКТ1 – средняя ширина катушки, м, определяется по формуле (9.5)
при замене yК расчетным шагом y1Р обмотки статора, найденным
по формуле (6.12); bП1, tZ1, hП1 – размеры зубцовой зоны, м.
Активное сопротивление фазы статора, о.е.,
r *1 r 1 I1H U1H ,
где U1H, I1H – номинальные фазные напряжение, В, и ток, А.
(9.10)
175
Индуктивное сопротивление рассеяния фазы статора, Ом,
x1 15,8 f1 w12 l / 1 10 6 ( p q1 ) ,
(9.11)
здесь f1 – частота, Гц; w1 – число последовательно соединенных витков фазы; р – число пар полюсов; q1 – число пазов на полюс и фазу; lδ / – расчетный размер, м,
l / l 1 nК bК ,
(9.12)
где nК, bК – число и ширина радиальных каналов, размеры в метрах;
коэффициент магнитной проводимости рассеяния обмотки статора
1 П1 Л 1 Д1 ,
(9.13)
где λЛ1, λД1, λП1 – коэффициенты магнитной проводимости лобового,
дифференциального и пазового рассеяния фазы статора.
в)
h1
hS1
b1
bS1
h2
hК h3
h1
bS1
h2
hК
b1
h2
bS 1
hS1
hS1
hК
h1
bИЗ
bИЗ
б)
bИЗ
а)
bП1
Рис. 9.3. К расчету коэффициента магнитной проводимости
рассеяния пазов статора
Коэффициент магнитной проводимости рассеяния пазов статора:
трапецеидального полузакрытого с трапециевидной клиновой частью
(рис. 9.3, а)
П1 k h1 (3 b1 ) [h2 b1 3 hК (b1 2bS1 ) hS1 bS1 ] k / ; (9.14)
трапецеидального
(рис. 9.3, б)
полузакрытого
с
овальной
клиновой
частью
П1 k h1 (3 b1 ) [ 0,785 bS1 (2b1 ) h2 b1 hS1 bS1 ] k / ; (9.15)
прямоугольного полуоткрытого (рис. 9.3, в)
176
П1
h1 h3
h
h
h
3hК
k 2
S1 k / 3 ;
3 bП1
4 bП1
bП1 bП1 2 bS1 bS1
(9.16)
здесь все размеры (рис. 9.3) в одинаковых единицах измерения; размер h2 ≈ bИЗ ; односторонняя толщина корпусной изоляции bИЗ по
табл. 4.6, 4.7, 4.9; коэффициенты kβ и kβ / зависят от относительного
укорочения шага β, определяемого по формулам (6.10)–(6.13).
Для однослойных обмоток с диаметральным шагом (β = 1)
k = k / = 1;
для обмоток с укороченным шагом:
при 2/3 ≤ β ≤ 1
k / 0,25 (1 3 ) ;
при 1/3 ≤ β ≤ 2/3
k / 0,25 (6 1) ;
(9.17)
(9.18)
(9.19)
для всех типов обмоток коэффициент
k 0,25 (1 3 k / ) .
(9.20)
Коэффициент магнитной проводимости лобового рассеяния
Л 1 K Л q1 (l Л 1 0,64 ) l / ,
(9.21)
где KЛ – коэффициент, учитывающий тип обмотки и равный 0,67 для
однослойных двухплоскостной и шаблонной равносекционной обмоток; 0,47 – для однослойной трехплоскостной; 0,34 – для двухслойных и однослойных “вразвалку”; lЛ1 – длина лобовой части средней
катушки катушечной группы, м, определяется для всех обмоток по
формулам (9.4)–(9.8), для одно-двухслойных обмоток в формуле (9.7)
следует принимать коэффициент K = 1; β – относительное укорочение
шага по формуле (6.10); τ – полюсное деление, м, по формуле (5.5);
lδ / – расчетный размер, м, по формуле (9.12).
Коэффициент магнитной проводимости дифференциального рассеяния
(9.22)
Д1 t Z1 1 (12 k ) ,
здесь ξΔ1 – коэффициент дифференциального рассеяния:
при Z 1
1 k / (1 Z1 ) ;
(9.23)
177
при Z 1
1 k / (2 Z Z2 Z1 Z ) ;
(9.24)
αZ – коэффициент, зависящий от числа пазов и скоса пазов βСК:
Z
2
( z1 z2 ) 2 СК
;
(9.25)
ΔZ1 – коэффициент, учитывающий размеры зубцовой зоны статора:
2
b 2
bS1 t Z 1 2
S
1
, (9.26)
2
Z 1 (k 1 1) k 1 1,5
t
t
1
0
,
08
b
Z 1
Z1
S1
где скос пазов βСК определен в параграфе 7.2; все размеры измерены в одних единицах измерения; при ΔZ1 < 0 принимать ΔZ1 = 0.
Индуктивное сопротивление рассеяния фазы статора, о.е.,
x * 1 x1 I1H U1H ,
(9.27)
где U1H, I1Н – номинальные фазные напряжение, В, и ток, А.
Значения относительных параметров обмоток статоров двигателей общего назначения с удовлетворительными техническими характеристиками приведены в табл. 9.4.
Таблица 9.4
Сопротивления обмоток статоров в относительных единицах
Ротор фазный
Ротор короткозамкнутый
r *1
x *1
r *1
x *1
До 1,0
—
—
0,1 – 0,2
0,05 – 0,2
1 – 15
0,025 – 0,06 0,045 – 0,12 0,04 – 0,12
0,05 – 0,15
15 – 90
0,015 – 0,05 0,055 – 0,15 0,02 – 0,07
0,07 – 0,14
90 – 400
0,015 – 0,03 0,08 – 0,18
0,01 – 0,03
0,08 – 0,14
Большие значения параметров соответствуют: машинам меньшей
мощности при одинаковой частоте вращения; машинам с большим
числом полюсов 2р при одинаковой мощности.
Р2Н, кВт
9.2. Параметры (сопротивления) обмотки фазного ротора
Активное сопротивление фазы ротора, Ом,
r2 K R w2 lW 2 (a2 qЭФ 2 ) ,
(9.28)
здесь KR – коэффициент, учитывающий увеличение активного сопро-
178
тивления за счет поверхностного эффекта, из-за малой частоты тока в роторе f2 = sf1 при близких к номинальному скольжениях считают KR = 1; – удельное сопротивление медных проводов, Омм,
при расчетной рабочей температуре для выбранного класса нагревостойкости изоляции обмотки ротора определяют по табл. 9.1, изоляция обмотки ротора имеет тот же класс нагревостойкости, что и
у обмотки статора; w2 – число последовательно соединенных витков
фазы; a2 – число параллельных ветвей фазы ротора; qЭФ2 – сечение
эффективного проводника, м2, определенное для окончательно выбранных числа и размеров элементарных проводников обмотки ротора; lW2 – средняя длина витка обмотки ротора, м,
lW 2 2 (l2 l Л 2 ) ,
(9.29)
где l2 – длина ротора, м; lЛ2 – определяемая по размерам средней катушки обмотки ротора расчетная длина лобовой части, м.
Ширина средней катушки обмотки ротора, м,
bКТ 2 ( D2 hП 2 ) yК 2 z2 ,
(9.30)
здесь D2 – внешний диаметр, м; hП2 – глубина паза ротора, м; z2 – число пазов (зубцов) ротора; yК2 – шаг средней катушки в пазовых делениях: для всыпных обмоток из провода круглого сечения yК2 = y2,
где y2 – шаг обмотки в пазовых деления, выбираемый по рекомендациям параграфа 4.4 в пределах y2 = (0,7–0,85)τ2 = 3(0,7–0,85)q2, для
стержневых волновых обмоток ротора y2 = τ2 = 3q2; q2 – число пазов
на полюс и фазу обмотки ротора.
Катушки петлевых равносекционных всыпных обмоток ротора
выполняют с трапециевидной формой лобовых частей (рис. 9.2, б).
Длину вылета lВЫЛ2 и длину всей лобовой части lЛ2 таких катушек
определяют по формулам (9.3), (9.4), выбирая коэффициенты kВЫЛ и
kЛ по табл. 9.2 для катушек с трапециевидными лобовыми частями.
У стержневых волновых обмоток ротора при напряжении на
контактных кольцах UКК ≤ 750 В средняя длина лобовой части, м,
l Л 2 hП 2 0,05 bКТ 2
1 [(bП 2 0,0035 ) t Z 2 ]2 ,
(9.31)
длина вылета лобовой части, м,
l ВЫЛ 2 0,5 hП 2 0,025
bКТ 2 (bП 2 0,0035 ) t Z 2
2
2 1 [(bП 2 0,0035 ) t Z 2 ]
,
(9.32)
179
где размеры зубцовой зоны ротора bКТ2, bП2, tZ2, hП2 даны в метрах.
Активное сопротивление фазы ротора, приведенное к статору, Ом,
r 2 / 12 r 2 ,
(9.33)
здесь коэффициент приведения сопротивлений фазного ротора
12 m1 (w1 kO1 ) 2 [ m2 (w2 kO 2 ) 2 ] ,
(9.34)
где m1, m2 – число фаз обмоток статора и ротора принимают m1= m2;
w1, w2 – число последовательно соединенных витков фазы обмоток
статора и ротора; kО1, kО2 – обмоточные коэффициенты обмоток статора и ротора.
Приведенное активное сопротивление фазы ротора, о.е.,
r * 2 / r 2 / I1H U1H ,
(9.35)
где U1H, I1H – номинальные фазные напряжение, В, и ток, А.
Индуктивное сопротивление рассеяния фазы неподвижного ротора, Ом,
(9.36)
x 2 15,8 f1 w22 l / 2 10 6 ( p q2 ) ,
здесь f1 – частота сети, Гц; р – число пар полюсов; q2 – число пазов
на полюс и фазу; lδ / – расчетный размер, м,
l / l2 nК bК ,
(9.37)
где nК – число радиальных вентиляционных каналов; bК – ширина радиальных каналов. Все размеры приведены в метрах.
Коэффициент магнитной проводимости рассеяния обмотки ротора
2 П 2 Л 2 Д 2 ,
(9.38)
где λП2, λЛ2, λД2 – коэффициенты магнитной проводимости пазового,
лобового и дифференциального рассеяния фазы ротора.
Коэффициент магнитной проводимости пазового рассеяния фазного ротора определяют: для полузакрытых трапецеидальных пазов
с трапециевидной клиновой частью (рис. 9.4, а) по формуле (9.14),
с овальной клиновой частью (рис. 9.4, б) по формуле (9.15); для полуоткрытых прямоугольных пазов (рис. 9.4,в) по формуле (9.16) при
замене в этих формулах размеров bS1, hS1, bП1 на bS2, hS2, bП2 и подстановке толщины корпусной изоляции bИЗ обмотки фазного ротора
по рекомендациям параграфа 4.4.
180
hК
h2
b2
bИЗ
h3
h1
0,1b2
h1
h1
bИЗ
hК
hК
bS2
hS2
в)
h2
b1
b S2
hS2
б)
hS2
b1
bS2
h2
а)
bП2
Рис. 9.4. К расчету коэффициента магнитной проводимости
рассеяния пазов фазного ротора
Коэффициенты kβ и kβ / обмотки фазного ротора определяют по
формулам (9.17)–(9.20) для относительного укорочения β, значение
которого принимают равным: для всыпных петлевых обмоток из
провода круглого сечения β = y2/(3q2); для стержневых волновых
обмоток с целым числом q2 пазов на полюс и фазу β = 1, с дробным q2 при знаменателе дробности d = 2
(3 q2 0,5) (3 q2 ) 1 1 (6 q2 ) .
(9.39)
Коэффициент магнитной проводимости лобового рассеяния обмотки фазного ротора
Л 2 0,34 q2 (l Л 2 0,64 ) l / ,
(9.40)
где все размеры приведены в метрах.
Коэффициент магнитной проводимости
рассеяния
дифференциального
Д 2 t Z 2 2 (12 k ) ,
(9.41)
здесь ξΔ2 – коэффициент дифференциального рассеяния определяется
по приближенной формуле (более сложный и точный метод расчета
приведен в /5, 11/)
2 1 Z 2 ;
(9.42)
181
2
2
bS 2
bS 2 t Z 2 2
1,
2
Z 2 k 2 1 1,5
t
t
1
0
,
08
b
Z2
Z2
S2
(9.43)
где все размеры в одних единицах длины; при ΔZ2 < 0 считать ΔZ2 = 0.
Приведенное к статору индуктивное сопротивление рассеяния
фазы ротора, Ом,
(9.44)
x 2 / 12 x 2 ;
в относительных единицах
x *2 / x 2 / I1H U1H ,
(9.45)
где U1H, I1Н – номинальные фазные напряжение, В, и ток, А.
Значения относительных параметров обмоток роторов двигателей общего назначения с удовлетворительными техническими характеристиками приведены в табл. 9.5.
Таблица 9.5
Сопротивления обмоток роторов в относительных единицах
Ротор фазный
Ротор короткозамкнутый
/
/
r *2
x *2
r *2 /
x *2 /
До 1,0
—
—
0,07 – 0,15
0,08 – 0,3
1 – 15
0,035 – 0,1
0,07 – 0,2
0,02 – 0,1
0,08 – 0,2
15 – 90
0,02 – 0,075 0,065 – 0,25 0,014 – 0,035 0,1 – 0,25
90 – 400
0,02 – 0,055
0,1 – 0,25
0,01 – 0,025
0,2 – 0,2
Большие значения параметров соответствуют: машинам меньшей мощности при одинаковой частоте вращения; машинам с большим числом полюсов 2р при одинаковой мощности.
Р2Н, кВт
9.3. Параметры обмотки короткозамкнутого ротора
Активное сопротивление фазы короткозамкнутого ротора, Ом,
r 2 r C 2 r КЛ 2 ,
(9.46)
здесь сопротивление стержня короткозамкнутой клетки ротора, Ом,
r C k R lC qC ;
(9.47)
сопротивление участка короткозамыкающих колец между двумя
стержнями, Ом,
182
r КЛ DКЛСР ( z2 qКЛ ) ;
(9.48)
коэффициент приведения тока кольца к току стержня Δ определяется по формуле (7.38).
В формулах (9.46)–(9.48) kR – коэффициент, учитывающий увеличение активного сопротивления стержня за счет поверхностного
эффекта, при расчете рабочих режимов в диапазоне скольжений от
нуля до номинального частота тока в роторе невелика и kR = 1;
– удельное сопротивление материала клетки ротора, Омм, при расчетной рабочей температуре определяют по табл. 9.1, температуру принимают по выбранному классу нагревостойкости изоляции
статора; lC = l2 – длина стержня клетки ротора, м; qС – фактическое
сечение стержня, м2, определяемое по формулам (7.49), (7.66);
DКЛСР – средний диаметр короткозамыкающего кольца, м; z2 – число
пазов (зубцов) ротора; qКЛ – сечение короткозамыкающего кольца, м2.
Приведенное к обмотке статора активное сопротивление фазы
короткозамкнутого ротора, Ом, определяют по формуле (9.33), приняв коэффициент приведения сопротивлений короткозамкнутого ротора
2
(9.49)
12 4 m1 ( w1 kO1 ) 2 ( z2 kСК
),
где m1 – число фаз обмотки статора; w1 – число последовательно соединенных витков фазы статора; kО1 – обмоточный коэффициент обмотки статора; z2 – число пазов ротора; kСК – коэффициент скоса, определяемый по формуле (7.34).
Приведенное активное сопротивление фазы ротора r*2 / в относительных единицах рассчитывают по формуле (9.35).
Индуктивное сопротивление рассеяния фазы неподвижного ротора, Ом,
x 2 7,9 f1 l / 2 10 6 ,
(9.50)
здесь f1 – частота изменения напряжения сети, Гц; lδ / – расчетный
размер, м, по формуле (9.37); коэффициент магнитной проводимости
рассеяния обмотки ротора
2 П 2 Л 2 Д 2 СК ,
(9.51)
где λП2, λЛ2, λД2, λСК – коэффициенты магнитной проводимости пазового, лобового, дифференциального рассеяния и рассеяния скоса пазов
ротора.
183
Коэффициент магнитной проводимости рассеяния закрытых и
полузакрытых трапецеидальных пазов ротора (рис. 9.5, а, б, в, г)
h b2 2
b
0
S
2
1
S2 ,
1
0,66
П 2 k Д
2 b1
3 b1 8 qC
(9.52)
здесь λS2 – коэффициент магнитной проводимости шлица для пазов:
рис. 9.5, а
(9.53)
S 2 hS 2 bS 2 ;
рис. 9.5, б
(9.54)
S 2 hS 2 bS 2 1,12 103 hS 2 / I 2 ;
рис. 9.5, в, г
(9.55)
S 2 0,3 1,12 103 hS 2 / I 2 .
/
b1
h0
hS2
b1
b2
0,1b2
/
hS2
/
г)
h0
0,1b2
b2
b2
b1Н
bВ
h0Н
b 2Н
0,1b2Н
0,1b2
hS2
hS2
0,1b2
hS2
е)
в)
hВ
b 1Н
bВ
h0Н
0,1b2Н
b1
bS2
h0
b2
hВ
hS2
д)
б)
b1
bS2
h0
hS2
а)
b 2Н
Рис. 9.5. К расчету коэффициента магнитной проводимости рассеяния трапецеидальных и лопаточных пазов короткозамкнутого
ротора с литой обмоткой
184
Коэффициент магнитной проводимости закрытых лопаточных
пазов (рис. 9.5, д, е)
(9.56)
П 2 П 2 В 2 П 2 Н ,
здесь λП2В и λП2Н – коэффициенты магнитной проводимости потоков
пазового рассеяния соответственно верхней и нижней частей стержня ротора в лопаточном пазу:
П 2 В k ДВ [0,66 (hB 0,5bB ) (2bB )] 0,3 1,12 103 hS 2 / I 2 , (9.57)
по рис. 9.5, д
П 2 Н k ДН h0 H [1,5 (b1H b2 H )] (hB 0,1bB ) (2bB ) ;
(9.58)
по рис. 9.5, е
h
h 0,1b
2 2
b
b
0H
1
H
B
B
B
1
0,66
, (9.59)
П 2 H k ДH
2 b1
2 bB
3 b1H 8 qCH
коэффициент
r CB (r CB r CH ) ,
(9.60)
где rСВ, rСН – активные сопротивления, Ом, верхней и нижней частей
стержня рассчитывают по формуле (9.47), подставляя вместо qC сечения верхней qCB и нижней qCH частей стержня, м2, определяемые по
формулам (7.58), (7.49) для окончательно выбранных размеров паза.
В формулах (9.52)–(9.59) все размеры приведены в миллиметрах; характерный размер паза
h 0 h1 0,4 b2 ,
(9.61)
где h1 = h1Н и b2 = b2Н для лопаточных пазов, размеры h1, b2, h1Н, b2Н
определены при расчете пазов ротора в параграфе 7.2; коэффициенты kД, kДВ, kДН учитывают уменьшение проводимости пазового рассеяния за счет вытеснении тока в стержне, при расчете номинального
режима двигателя поверхностный эффект проявляется слабо и принимают kД = kДВ = kДН = 1; ток в стержне I2, А, при расчете номинального режима I2 = I2H. Номинальный ток I2H рассчитывают предварительно по формуле (7.7) при подстановке в нее коэффициента приведения токов νI короткозамкнутого ротора, определяемого по (7.33).
Коэффициент магнитной проводимости лобового рассеяния литой обмотки ротора с плотно прилегающими к торцам сердечника
185
короткозамыкающими кольцами
Л 2 [2,3 DКЛСР ( z2 l / 2 )] lg [4,7 DКЛСР (hКЛ 2 bКЛ )] , (9.62)
где DКЛСР, hКЛ, bКЛ – размеры короткозамыкающего кольца (рис. 7.4).
Все размеры в (9.62) в одинаковых единицах измерения.
Коэффициент магнитной проводимости дифференциального рассеяния обмотки короткозамкнутого ротора рассчитывают по формулам (9.41)–(9.43), принимая для закрытых (bS2 = 0) пазов ΔZ2 = 0.
Коэффициент магнитной проводимости рассеяния скоса пазов
2
СК t Z 2 СК
(12 k k ) ,
(9.63)
где βСК – скос пазов, принятый в параграфе 7.2; k – коэффициент насыщения магнитной цепи по формуле (8.76). Все размеры в (9.63)
измерены в одинаковых единицах длины.
Приведенное к обмотке статора ндуктивное сопротивление рассеяния фазы короткозамкнутого ротора x2 /, Ом, рассчитывают по
формуле (9.44), подставив в формулу коэффициент приведения сопротивлений короткозамкнутого ротора ν12, определяемый по (9.49).
Приведенное индуктивное сопротивление фазы короткозамкнутого ротора в относительных единицах x *2 / рассчитывают по формуле (9.45). Значения относительных параметров обмоток короткозамкнутых роторов приведены в табл. 9.5.
10. ПОТЕРИ МОЩНОСТИ И КПД
Потери мощности в асинхронных машинах условно делят на
магнитные (основные и добавочные), электрические, механические и
добавочные при нагрузке.
Основные магнитные потери рассчитывают только в сердечнике статора, так как при нагрузке двигателя, не превышающей номинальной, частота перемагничивания стали ротора f2 = sf1 и магнитные потери в сердечнике ротора незначительны.
Основные магнитные потери в сердечнике статора, Вт,
pMOCH p 1,0 50 ( f1 50) (k ДА BA2 mA k ДZ BZ21CP mZ1 ) ,
(10.1)
здесь р1,0/50 – удельные потери в стали, Вт/кг, при амплитуде индукции 1,0 Тл и частоте перемагничивания 50 Гц заданы в табл. 10.1;
186
β – коэффициент, учитывающий влияние частоты перемагничивания
на магнитные потери, определяют по табл. 10.1; kДА и kДZ – коэффициенты, учитывающие увеличение магнитных потерь за счет технологии обработки стали и неравномерного распределения магнитной
индукции в отдельных частях сердечника, для машин мощностью
Р2Н < 250 кВт принимают kДА = 1,6 и kДZ = 1,8, для машин большей
мощности kДА = 1,4 и kДZ = 1,7; ВА – индукция в ярме статора, Тл, по
формуле (8.66); ВZ1СР – средняя индукция в зубцах статора, Тл; для
зубцов постоянной и мало изменяющейся ширины (рис. 6.4) ВZ1СР
считают равной индукции ВZ1, найденной по (8.11); для зубцов переменной ширины (рис. 6.5) ВZ1СР определяют по (8.20); mA, mZ1 –
масса стали ярма и зубцов статора, кг,
mA ( DA hA ) hA lCT 1 kC1 C ;
(10.2)
mZ1 z1 bZ1CP hZ1 lCT 1 kC1 C ,
(10.3)
где все размеры приведены в метрах; γС – плотность электротехни3
3
ческой стали, кг/м , в расчетах принимают γС = 7800 кг/м ; hA – высота ярма статора, рассчитанная по формуле (8.65); hZ1 – расчетная высота зубца статора, определенная в параграфе 8.3; bZ1CP – средняя ширина зубца статора: для зубцов постоянной и мало изменяющейся
ширины bZ1CP считают равной расчетной ширине зубца bZ1, принятой в параграфе 8.3; для зубцов переменной ширины bZ1CP рассчитывают по найденным с помощью формул (8.17), (8.18) максимальной bZ1MAX и минимальной bZ1MIN ширине зубца
bZ1CP ( bZ1MIN bZ1MAX ) 2 .
(10.4)
Таблица 10.1
Удельные потери в стали статоров асинхронных двигателей
значения коэффициента β (толщина листов стали 0,5 мм)
Марка стали
2013
2212
2214
р10/50, Вт/кг
β
Марка стали
р10/50, Вт/кг
β
2,5
2,2
2,0
1,5
1,5
1,5
2312
2412
1,75
1,3
1,4
1,3
Добавочные магнитные потери, возникающие в зубцах сердечников условно делят на поверхностные и пульсационные.
Неравномерное распределение индукции в зазоре машины, обусловленное раскрытиями (шлицами) пазов статора (рис. 10.1, а), вы-
δ
Bδ
B0
187
зывает колебания (пульсации) магнитного потока и добавочные потери в зубцах вращающегося с частотой n ротора. Из-за малого пространственного периода tZ1 и
B
β0
высокой частоты nz1 глубина
проникновения пульсаций магнитного потока в зубцы рото0,3
ра невелика. Созданные пуль0,2
сациями потока добавочные
потери выделяются в обращен0,1
ном к статору тонком поверхностном слое зубцов ротора.
0
4 8 12 bS /δ
Поэтому эти потери называют
b S tZ
поверхностными.
a)
б)
Точно так же раскрытия
Рис. 10.1. К расчету поверхностных
пазов вращающегося ротора
потерь в асинхронной машине
создают поверхностные потери
в зубцах статора.
Амплитуда пульсаций индукции, Тл, над зубцами ротора от
раскрытий пазов статора
B02 02 k B ,
(10.5)
над зубцами статора от раскрытий пазов ротора
B01 01 k B .
(10.6)
В формулах (10.5), (10.6) коэффициенты β01 = f(bS2 /δ) и β02 = f(bS1 /δ)
определяют по рис. 10.1, б; при закрытых пазах ротора В01 = 0.
Удельные поверхностные потери, Вт/м2, на поверхности ротора
pПУД 2 0,5 kОБР 2 ( z1 n)1,5 ( B02 tZ1 ) 2 ,
(10.7)
на поверхности статора
pПУД 1 0,5 kОБР1 ( z2 n)1,5 ( B01 tZ 2 ) 2 .
(10.8)
Здесь коэффициенты kОБР1 и kОБР2 учитывают увеличение удельных потерь за счет механической обработки поверхности сердечников: при отсутствии обработки, хонинговании (статор) и обработке
ротационным резанием (ротор), а также для роторов с центробежной заливкой kОБР1 = kОБР2 = 1,4–1,8; при шлифовании поверхностей
(машины с номинальной мощностью Р2Н > 160 кВт) коэффициенты
kОБР1 = kОБР2 = 1,7–2,0; n – частота вращения ротора, об/мин, обычно
188
принимают n = n1; tZ1, tZ2 – зубцовые деления статора и ротора, м;
B01, B02 – амплитуды пульсаций индукции, Тл.
Поверхностные потери мощности, Вт, в зубцах ротора
в зубцах статора
pПОВ2 pПУД 2 (tZ 2 bS 2 ) z2 lCT 2 ,
(10.9)
pПОВ1 pПУД 1 (tZ1 bS1 ) z1 lCT 1 ,
(10.10)
в формулах (10.9), (10.10) все размеры даны в метрах.
При вращении ротора изменяется взаимное положение зубцов
статора и ротора. Вследствие этого индукция в зубцах машины меняется и возникают колебания (пульсации) магнитного потока во
всем объеме каждого зубца. Выделяющиеся при этом в зубцах добавочные магнитные потери называют пульсационными.
Амплитуда пульсаций магнитной индукции, Тл, в среднем сечении:
зубцов статора
BПУЛ 1 2 BZ1CP (2 t Z1 ) ;
(10.11)
зубцов ротора
BПУЛ 2 1 BZ 2CP (2 t Z 2 ) .
(10.12)
В формулах (10.11), (10.12) все размеры выражены в одинаковых единицах длины, коэффициенты γ1, γ2 определяют по формулам
(8.3), (8.5). Средняя индукция в зубцах статора BZ1CP, Тл, определена
при расчете основных магнитных потерь. Среднюю индукцию в зубцах ротора BZ2CP , Тл, постоянной или мало изменяющейся ширины (рис. 7.1, 7.5) рассчитывают по формуле (8.33), в зубцах переменной ширины (рис. 7.2, 7.6) – по формуле (8.39). В зубцах резко изменяющейся формы, образованных лопаточными пазами (рис. 7.7), рассчитывают амплитуду пульсаций индукции BПУЛ2В в верхней и BПУЛ2Н
в нижней частях зубца по формуле (10.12). Индукцию BZ2CPВ, Тл, в
среднем сечении верхней части зубца с шириной bZ2В определяют
по формуле (8.33); индукцию BZ2CPН, Тл, в среднем сечении нижней
части зубца – по формулам (8.33) или (8.39).
Пульсационные потери в зубцах статора, Вт,
pПУЛ 1 1,1mZ1 ( z2 n BПУЛ 1 ) 2 10 5 .
(10.13)
Пульсационные потери в зубцах ротора с трапецеидальными
(рис. 7.1, 7.5, 7.6) и прямоугольными (рис. 7.2) пазами, Вт,
189
pПУЛ 2 1,1mZ 2 ( z1 n BПУЛ 2 ) 2 10 5 .
(10.14)
В формулах (10.13), (10.14) BПУЛ1, BПУЛ2 – амплитуды пульсаций
индукции, Тл; n – частота вращения ротора, об/мин; mZ1 – масса стали
зубцов статора, кг, определяется по формуле (10.3); масса стали зубцов ротора, кг,
mZ 2 z2 bZ 2CP hZ 2 lCT 2 kC 2 C ,
(10.15)
где все размеры приведены в метрах; γС = 7800 кг/м3 – плотность стали; hZ2 – определяемая при расчете магнитной цепи расчетная высота зубца ротора; bZ2CP – средняя ширина зубца ротора: для зубцов
постоянной или мало изменяющейся ширины (рис. 7.1, 7.5) равна
принятой в параграфе 8.4 расчетной ширине зубца bZ2; для зубцов
переменной ширины (рис. 7.2, 7.6) bZ2CP определяют по найденным
при расчете магнитной цепи наибольшей bZ2MAX и наименьшей bZ2MIN
ширине зубца
bZ 2CP 0,5 (bZ 2MAX bZ 2MIN ) .
(10.16)
Пульсационные потери в зубцах роторов с лопаточными пазами (рис. 7.7), Вт,
pПУЛ 2 рПУЛ 2 В рПУЛ 2 Н .
(10.17)
Здесь рПУЛ2В и рПУЛ2Н – пульсационные потери в верхней и нижней частях зубца, Вт, определяют по формуле (10.14), заменив mZ2
массами mZ2B или mZ2H и ВПУЛ2 амплитудами пульсаций индукции
ВПУЛ2В или ВПУЛ2Н для соответствующей части зубца. Массу стали
mZ2B верхней и mZ2Н нижней частей зубцов, кг, рассчитывают по
формуле (10.15) при подстановке соответствующих размеров: вместо hZ2 расчетной высоты hZ2В или hZ2Н, определяемой по формулам
(8.51)–(8.53); вместо bZ2 расчетной ширины bZ2В или bZ2Н, найденных при расчете магнитной цепи.
У машин с короткозамкнутым и фазным ротором со стержневой обмоткой раскрытия (шлицы) пазов ротора малы. Вследствие
этого пульсационные и поверхностные добавочные потери в зубцах
статора много меньше, чем в зубцах ротора.
Полные добавочные магнитные потери, Вт,
рМДОБ рПОВ1 рПУЛ 1 рПОВ2 рПУЛ 2 .
(10.18)
190
Полные магнитные потери в асинхронном двигателе, Вт,
рМ рМОСН рМДОБ .
Электрические потери мощности, Вт, в обмотках:
статора
pЭ1 m1 I12 r1 ;
(10.19)
(10.20)
ротора
pЭ 2 m2 I 22 r 2 m1 ( I 2 / ) 2 r 2 / .
(10.21)
Здесь m1 = 3 – число фаз статора; m2 – число фаз ротора: для
фазных роторов m2 = m1, для короткозамкнутых роторов m2 = z2;
I1 – фазный ток статора, А; I2 – действительный (неприведенный) фазный ток ротора, А; I2 / – приведенный к обмотке статора фазный ток
ротора, А; токи I1 и I2 / определяют при расчете рабочих характеристик (глава 11); r1 и r2 – активные сопротивления фазы статора и ротора, Ом, определяемые по формулам (9.1), (9.28), (9.46); r2 / – приведенное к обмотке статора активное сопротивление фазы ротора, Ом,
определяется по формуле (9.33).
В машинах с фазным ротором следует учесть электрические
потери в контакте между щетками и контактными кольцами, Вт,
pЭЩ m2 U Щ I 2 К ,
(10.22)
здесь ΔUЩ – падение напряжения в скользящем контакте щетка –
кольцо, В: для металлографитных щеток марки МГ ΔUЩ ≈ (0,5–1,1) В;
для электрографитированных щеток марки ЭГ ΔUЩ ≈ (2,0–2,6) В;
I2К – ток в контактном кольце, А, при соединении обмотки ротора в
звезду I2К = I2, при соединении в треугольник I2К = √ 3 I2.
Механические потери мощности состоят из потерь на трение
в подшипниках, на вентиляцию и на трение щеток о контактные
кольца в машинах с фазным ротором.
Потери на трение в подшипниках и на вентиляцию, Вт: в закрытых обдуваемых двигателях со степенями защиты IP44, IP54 и
способами охлаждения:
IC0141 при внешнем диаметре DA < 0,5 м
pМЕХ KT n 2 DA4 10 2 ,
(10.23)
191
при внешнем диаметре DA ≥ 0,5 м
pМЕХ KT DA3 10 3 ;
(10.24)
IC0151 при высоте оси вращения h ≥ 280 мм (рис. 3.6)
pМЕХ KT DA3 10 3 0,13 n 2 DA4 10 2 ;
(10.25)
в защищенных (продуваемых) двигателях со степенью защиты
IP23 и способом охлаждения IC01:
с радиальной системой вентиляции без радиальных вентиляционных каналов с вентиляционными лопатками на торцах ротора
pМЕХ KT n 2 D31 10 3 ;
(10.26)
с радиальной системой вентиляции с радиальными вентиляционными каналами и вентиляционными лопатками на торцах ротора
pМЕХ ( 11 nК ) n 2 D31 10 3 ;
(10.27)
с аксиальной системой вентиляции
pМЕХ KT n 2 D3ВЕНТ 10 3 .
(10.28)
В формулах (10.23)–(10.28) коэффициент KT выбирают для двигателей со степенями защиты IP44, IP54 по табл. 10.2; для машин
со степенью защиты IP23 по табл. 10.3; n – частота вращения ротора, об/мин, обычно принимают n = n1; DА, D1 – внешний и внутренний
диаметры сердечника статора, м; DВЕНТ – внешний диаметр вентилятора, м; в большинстве конструкций можно принять DВЕНТ ≈ DА;
nК – число радиальных вентиляционных каналов в сердечниках машины.
Таблица 10.2
К расчету механических потерь в двигателях
с исполнениями по степени защиты IP44, IP54
Расчет
По формуле (10.23)
По формулам (10.24), (10.25)
Число
полюсов 2р
2
≥4
2
4
6
8
10–12
KT
1,3(1 – DA),
где DA, м,
1
3,65
1,5
0,7
0,35
0,2
192
Таблица 10.3
К расчету механических потерь в двигателях
с исполнением по степени защиты IP23
Расчет
DA, м,
Число полюсов 2р
KT
по формуле (10.26)
≤ 0,25
> 0,25
2
≥4
2
≥4
5
6
6
7
по формуле (10.28)
≤ 0,25
> 0,25
2 – 12
2 – 12
2,9
3,6
Для машин с фазным ротором к найденным по (10.23)–(10.28)
потерям в подшипниках и на вентиляцию необходимо добавить потери мощности на трение щеток о контактные кольца, Вт,
pТЩ KTP Щ S Щ VК ,
(10.29)
здесь KTP – коэффициент трения щеток о контактные кольца, обычно
принимают KTP = 0,16–0,17; ρЩ – давление на щетку, кПа, для щеток
применяемых марок МГ и ЭГ можно принять ρЩ ≈ 15–25 кПа; SЩ – общая площадь контактной поверхности всех щеток, м2,
S Щ 3 S ЩП 10 6 ,
(10.30)
где SЩП – полное сечение щеток одной фазы, мм2, по формуле (4.34);
VК – линейная скорость поверхности контактных колец, м/с,
VК DКК n 60 ,
(10.31)
где DКК – внешний диаметр контактных колец, м, можно приближенно найти по внешнему диаметру D (рис. 4.26) подшипника, выбранного по рекомендациям параграфа 4.6, обычно ориентировочно принимают DКК ≈ (0,85–0,95)D; n = n1 – частота вращения ротора, об/мин.
Добавочные потери мощности при нагрузке возникают за счет
потоков рассеяния и высших гармонических магнитного потока в
зазоре, образованных МДС обмоток статора и ротора. В короткозамкнутых роторах возникают потери от поперечных токов, замыкающихся между стержнями через листы стали сердечника ротора.
Эти токи увеличиваются при скосе пазов ротора и добавочные потери могут достигать 1–2 % от потребляемой двигателем мощности.
В соответствии с государственным стандартом средние расчетные добавочные потери при номинальной нагрузке принимают равными 0,5 % от мощности Р1Н, подводимой к обмотке статора,
193
p ДН 0,005 Р1Н 0,005 Р2 Н Н .
(10.32)
В режимах отличных от номинального добавочные потери пересчитывают пропорционально квадрату отношения токов статора:
p Д р ДН ( I1 I1H ) 2 ,
(10.33)
где I1, I1Н – текущий и номинальный фазные токи статора, А.
КПД двигателя в относительных единицах
P2 P1 1 Σ p P1 ,
(10.34)
здесь Р1 – подводимая мощность, Вт; сумма потерь мощности, Вт,
Σ p pM pЭ1 pЭ 2 рМЕХ р Д ,
(10.35)
для машин с фазным ротором в потери рЭ2 и рМЕХ следует включить
электрические рЭЩ и механические рТЩ потери в щеточном контакте.
Ток холостого хода двигателя, А,
2
2
.
I XX I XXP
I XXA
(10.36)
Здесь реактивная составляющая тока холостого хода
I XXP I ;
(10.37)
активная составляющая тока холостого хода
I XXA ( pM pMEX pЭ1XX ) (m1 U1H ) .
(10.38)
В формулах (10.37), (10.38) Iμ – намагничивающий ток, А; U1Н –
номинальное фазное напряжение, В; рМ, рМЕХ – потери мощности, Вт;
электрические потери при холостом ходе в обмотке статора, Вт,
pЭ1ХХ m1 I 2 r1 ,
(10.39)
где r1 – активное сопротивление фазы статора, Ом.
Коэффициент мощности при холостом ходе двигателя
Cos XX I XXA I XX .
(10.40)
У большинства двигателей общего назначения коэффициент
мощности при холостом ходе CosφХХ = 0,08–0,015.
194
11. РАСЧЕТ РАБОЧИХ ХАРАКТЕРИСТИК
Рабочими характеристиками называют зависимости Р1, I1, Cosφ1,
η, s = f (P2). Обычно к ним относят также зависимости М, М2 = f (P2)
и I2 или I2 / = f (P2).
Рабочие характеристики рассчитывают, используя соотношения
для Г-образной схемы замещения (рис. 11.1) асинхронного двигателя.
Активные и индуктивные сопротивления r1, r2 /, x1, x2 / схемы замещения являются параметрами обмоток машины и определены в главе 9.
а)
//
İ1
–İ2 =
İ2
б)
/
İ1
Ċ1
2
Ċ1 (r1 + jx1 ) + jĊ1 x2
U1
İ0
U1
Ċ1 (r12 + jx12 )
/
Ċ1
2 r2
/
s
İ2
/
Ċ1
φ1
//
φ2
İ0
İ0А
İ 0Р
Рис. 11.1. Г-образная схема замещения приведенной асинхронной
машины (а) и соответствующая ей диаграмма напряжений и токов (б)
Активное сопротивление r12 намагничивающего контура Т-образной схемы замещения, учитывающее магнитные потери мощности в асинхронной машине, Ом,
r12 pMOCH (3 I 2 ) ;
(11.1)
в относительных единицах
r*12 r12 I1H U1H ,
(11.2)
где рМОСН – основные магнитные потери, Вт, по формуле (10.1);
Iμ – намагничивающий ток, А, по формуле (8.77); U1H, I1H – номинальные фазные напряжение, В, и ток, А, статора.
Индуктивное сопротивление x12, учитывающее взаимную индуктивность обмоток статора и ротора, Ом,
x 12 U1H I x 1 ;
(11.3)
195
в относительных единицах
x *12 x 12 I1H U1H .
(11.4)
У большинства двигателей общего назначения относительные
значения сопротивлений намагничивающего контура находятся в пределах r *12 = 0,05÷0,2; x *12 = 1,5÷5,5.
Коэффициент Ċ1, учитывающий изменение магнитного потока
при нагрузке за счет падения напряжения на сопротивлении обмотки статора:
– jγ
Ċ1 = 1 + Z1/Z2 = | Ċ1 | e ,
(11.5)
где
r1 x 12 r12 x 1
.
(11.6)
arc tg
r12 (r1 r12 ) x 12 ( x 1 x 12 )
В асинхронных двигателях малой мощности (Р2Н ≤ 2–3 кВт)
угол γ > 1°, поэтому при расчетах учитывают активную С1А и реактивную С1Р составляющие коэффициента Ċ1
2
C1A [r12 (r1 r12 ) x 12 ( x 1 x 12 )] (r12
x 212 ) ;
(11.7)
2
C1P ( x 1 r12 r1 x 12 ) (r12
x 212 ) .
(11.8)
Модуль коэффициента Ċ1
C1 C12A C12P .
(11.9)
В асинхронных двигателях мощностью более 2–3 кВт сопротивления r12 и r1 много меньше x12 , вследствие этого | γ | ≤ 1° и реактивной составля-ющей С1Р можно пренебречь, тогда
C1 C1A 1 x 1 x 12 .
(11.10)
В большинстве случаев рабочие характеристики рассчитывают
по формулам, приведенным в формуляре расчета (табл. 11.1). Графический метод расчета рабочих характеристик по круговой диаграмме /1, 5, 10/ менее точен и применяется редко.
Перед началом расчета рекомендуется выписать значения постоянных величин, не зависящих от изменяющегося при нагрузке
двигателя скольжения.
196
Таблица 11.1
Формуляр расчета рабочих характеристик асинхронного двигателя:
Р2Н = … кВт; U1H = … В; I1H = … А; I0А = … А; I0Р ≈ Iμ = … А;
рМ + рМЕХ = … кВт; r1 = … Ом; r2 / = … Ом; С1 = …; а / = … Ом;
а = … Ом; b / = … Ом; b = … Ом
№
Скольжение
Единица
Расчетная формула
измерения 0 0,2sHП … 1,2sHП sH
п/п
(a /r 2 / ) /s
(b /r 2 / ) /s
R = a + (a /r 2 / ) /s
X = b + (b /r 2 / ) /s
Ом
Ом
Ом
Z = √ R2 + X 2
I2 // = U1H /Z
cos φ2 // = R /Z
Ом
8 sin φ2 // = X /Z
9 I1A = I0A + I2 //cos φ2 //
10 I1P = I0P + I2 //sin φ2 //
–
A
A
11 I1 = √I1A 2 + I1P 2
/
//
12 I2 = C1I2
13 P1 = 3U1H I1A ∙10 – 3
14 pЭ1 = 3I1 r1∙10
/ 2
/
–3
15 pЭ2 = [3(I2 ) r2 + pЭЩ*]∙10
2
–3
16 pД = pДН (I1 / I1H) ∙10
17 Σp = pM + pMEX + pЭ1 +
A
A
кВт
кВт
кВт
кВт
кВт
+ p Э2 + p Д
18 P2 = P1 – Σp
19 η = 1 – Σp / P1
20 cos φ = I1A / I1
кВт
–
–
1
2
3
4
5
6
7
2
Ом
А
–
–3
П р и м е ч а н и я: * Электрические потери в щеточном контакте pЭЩ фазного ротора определяют для каждого значения s по формуле (10.22), для машин с короткозамкнутым ротором pЭЩ = 0.
1. Для машин с фазным ротором потери на трение в щеточном контакте рТЩ включить в механические потери pMEX .
197
К таким величинам относятся: номинальная мощность Р2Н, кВт;
номинальное фазное напряжение статора U1Н, В; активные сопротивления фаз статора и ротора r1, r 2 /, Ом; сумма потерь рМ + рМЕХ,
включая потери рТЩ для машин с фазным ротором, кВт; добавочные
потери при номинальной нагрузке рДН, кВт; составляющие тока синхронного холостого хода, А, реактивная I0P ≈ Iμ и активная
I 0 A ( pMOCH 3 I 2 r1 ) (3U1H ) .
(11.11)
Следует выписать также значение коэффициента С1, определенное по формулам (11.9) или (11.10), и обозначенные в формуляре
буквами a, a /, b, b / расчетные величины, Ом, определяемые в зависимости от принятого (точного или приближенного) метода расчета С1.
Если | γ | ≤ 1°, то С1 рассчитывают по формулам (11.7)–(11.9)
точного метода, и расчетные величины a, a /, b, b / определяют по
следующим формулам:
a C1A r1 C1P x1 b / x 2/ ;
a / C 12A C 12P ;
/
b C1A x1 C1P r1 a
b 2 C1A C1P ;
/
x 2/ .
(11.12)
При | γ | > 1° используют приближенный метод расчета. В этом
случае C1P ≈ 0 и С1 ≈ С1А ≈ 1 + x1/ x12 . Тогда
a / C 12 ;
a C1 r1 ;
b/ 0 ;
b C1 ( x 1 C1 x 2 ) .
Сosφ1
η
s I1,A P1,кВт
η
Сosφ1
I1
sH
s
P1
P2H
0
P2,кВт
Рис. 11.2. Рабочие характеристики
(11.13)
Предварительно принимают номинальное скольжение
sНП = r *2 /, где r *2 / – приведенное к обмотке статора сопротивление фазы ротора в относительных единицах по (9.33).
Задавая значения скольжения s
равные 0; 0,2sНП; 0,4sНП; 0,6sНП;
0,8sНП; sНП; 1,2sНП, рассчитывают рабочие характеристики
(рис. 11.2) в последовательности, приведенной в формуляре
расчета (табл. 11.1).
198
По результатам расчета чертят рабочие характеристики двигателя (рис. 11.2). По графику зависимости s = f (P2) определяют действительное номинальное скольжение sН, соответствующее заданной
номинальной мощности Р2Н (рис. 11.2). После чего рассчитывают
характеристики для действительного скольжения sH (последний столбец в табл. 11.1), в результате расчета определяют номинальные
данные двигателя: мощность Р2Н, кВт; токи I1Н и I2Н /, А; КПД ηН
и коэффициент мощности Cosφ1Н , о.е.
12. ПУСКОВЫЕ ХАРАКТЕРИСТИКИ
12.1. Расчет параметров обмотки короткозамкнутого
ротора с учетом вытеснения тока
При пуске двигателя частота тока в роторе f2 = sf1 велика. За
счет этого в стержнях обмотки короткозамкнутого ротора происходит вытеснение тока в верхнюю часть стержня, и плотность тока в
верхней части стержня увеличивается, а в нижней – уменьшается.
Площадь сечения верхней части стержня, по которой в основном и
течет ток, меньше площади сечения всего стержня. Поэтому активное сопротивление стержня и всей обмотки ротора увеличивается.
Одновременно уменьшается потокосцепление пазового рассеяния с обтекаемой током верхней частью стержня и индуктивное
сопротивление рассеяния стержня и обмотки ротора уменьшается.
Влияние вытеснения тока на параметры обмотки ротора рассматривают при ненасыщенном магнитопроводе машины. Влияние
насыщения на параметры обмоток рассмотрено в параграфе 12.2.
Изменение параметров обмотки ротора характеризуют коэффицициентами kR и kД. Коэффициент kR показывает, во сколько раз
увеличилось активное сопротивление пазовой части стержня rCξ при
неравномерном распределении плотности тока в нем по сравнению
с его сопротивлением rC при равномерном распределении плотности
тока по всему сечению стержня
k R rC rC .
(12.1)
Коэффициент демпфирования kД показывает, как уменьшается
коэффициент магнитной проводимости рассеяния паза λП2 ξ при вытеснения тока по сравнению с коэффициентом магнитной проводи-
199
мости пазового рассеяния λП2 при равномерном распределении плотности тока по сечению стержня ротора
k Д П 2 П 2 .
(12.2)
Коэффициенты kR и kД зависят от приведенной высоты стержня ξ, равной отношению высоты стержня hC к глубине проникновевния электромагнитного поля Δ в проводник:
hC .
(12.3)
При практических расчетах приведенная высота стержня
2 hC (bC bП ) ( f 2 C ) 10 7 ,
(12.4)
где hC – высота стержня в пазу, м (рис. 12.1); bC и bП – ширина стержня и паза, м; для роторов: с литыми обмотками bC = bП, с вставными стержнями bC = 0,9bП; f2 – частота тока ротора в рассматриваемом режиме, Гц; ρС – удельное сопротивление материала стержня
при расчетной температуре, Омм.
Для машин с медными вставными стержнями ротора при час–6
тоте f1 = 50 Гц и расчетных температурах 75 °С ( ρС75 = 10 /47 Омм
–6
по табл. 9.1) и 115°С ( ρС115 = 10 /41 Омм) соответственно
96,32 hC
s (bC bП ) ;
89,96 hC
s (bC bП ) .
(12.5)
Для литой из алюминия обмотки ротора при частоте f1 = 50 Гц
–6
и расчетных температурах 75° С ( ρС75 = 10 /21,5 Омм по табл. 9.1)
–6
и 115°С ( ρС115 = 10 /20,5 Омм) соответственно
65,15 hC s ;
63,61 hC s .
(12.6)
В формулах (12.5), (12.6) высота стержня ротора hC приведена
в метрах, скольжение s в относительных единицах.
При ξ ≤ 1 проявление поверхностного эффекта незначительно
(kR ≈ 1, kД ≈ 1) и сопротивления обмотки ротора можно считать постоянными независимо от частоты тока ротора f2.
При расчетах коэффициента kR условно считают, что ток ротора равномерно распределен по верхней части стержня, ограниченной
глубиной проникновения электромагнитного поля hR (рис. 12.1), которая практически не зависит от высоты и формы сечения стержня.
200
Глубина проникновения тока (электромагнитной волны) в стержень, м,
(12.7)
hR hC (1 ) ,
где φ – коэффициент, определяемый в зависимости от ξ по рис. 12.2;
значения φ рассчитаны по формулам, приведенным в /1, 5, 6/.
Коэффициент kR принимают равным отношению площадей сечения qС всего стержня к сечению qR его верхней (заштрихованной
на рис. 12.1) части, ограниченному глубиной проникновения hR:
k R qC q R .
(12.8)
Для стержней прямоугольного сечения (рис. 12.1, а)
k R qC qR hC hR 1 .
(12.9)
Для круглых стержней (рис. 12.1, б)
k R qC qR 1 КР ,
(12.10)
где φКР – значения коэффициента для круглых стержней, определяют
по графику φКР = f(ξ) на рис. 12.2.
Для стержней в полузакрытых и закрытых трапецеидальных
пазах (рис. 12.1, в, г) коэффициент kR рассчитывают по формуле (12.8),
подставляя в нее сечение стержня qC, мм2, найденное по (7.49).
hRH
bRH
/
hS2
a)
б)
b2
b2
в)
г)
b2Н
д)
Рис. 12.1. К расчету коэффициента kR
hC
hCH
bRH
hCH
h1Н
bR
hRH
bR
b1Н
bВ
b1Н
bВ
hВ
qR
hC
qR
h1Н
/
hS2
b1
hC
dC
h1
qR
b1
bS2
h1
qR
hС
hR
hS2
hS2
bS2
b2Н
е)
201
Ограниченная глубиной проникновения hR площадь сечения qR , мм2,
при hR ≤ 0,5b1
(12.11)
qR 0,25 b12 (1 КР ) ,
где φКР определяют в зависимости от ξ по рис. 12.2;
при 0,5b1 ≤ hR ≤ h1 + 0,5b1
где
qR 0,125 b12 0,5 (b1 bR ) (hR 0,5 b1 ) ,
(12.12)
bR b1 (b1 b2 ) (hR 0,5 b1 ) h1 ;
(12.13)
при hR > h1 + 0,5b1 принимают qR ≈ qC и считают kR = 1.
Обозначения размеров стержня в формулах (12.11)–(12.13) понятны из рис. 12.1, в, г; все размеры в формулах даны в миллиметрах; глубину проникновения тока hР определяют по формуле (12.7).
Высота hВ верхней
части стержней в лопаφ,φКР
точных пазах близка к
глубине проникновения
3,5
φКР
тока hР (рис. 12.1, д, е).
В большинстве двига3,0
телей средней мощности hВ ≤ hР, поэтому вытеснение тока в верх2,5
ней части стержня не
φ
учитывают и считают
2,0
активное
сопротивление r2В верхней части
стержня постоянным.
1,5
Вытеснение тока
в нижней части стерж1,0
ня учитывают в тех
случаях, когда глубина
проникновения тока hР,
0,5
найденная по формулам (12.5)–(12.7) при
подстановке в формулы
0
ξ
1,0
1,5
2,0
2,5
3,0
3,5
hC = hCH = hП2 – hB – hS2 /,
Рис. 12.2. Зависимости φ и φКР от припревышает высоту hВ
веденной высоты стержня ξ (φ ≈ ξ – 1
верхней части стержня
4
при ξ > 4 и φ ≈ 0,089ξ при ξ < 1)
(рис. 12.1, д, е).
202
Глубина проникновения тока в нижнюю часть стержня
hRH hR hB .
(12.14)
Ширина bRH, мм, и площадь qRH, мм2, поперечного сечения нижней части стержня, соответствующие глубине проникновения hRH,
для стержней в лопаточных пазах по рис. 12.1, д при hRH ≤ h1H
bRH b1H hRH ( b1H b2 H ) h1H ;
(12.15)
qRH 0,5 ( b1H bRH ) hRH .
(12.16)
При hRH > h1H принимают qRH = qCH и коэффициент увеличения сопротивления нижней части стержня kRH = 1.
В формулах (12.14)–(12.16) все размеры даны в миллиметрах.
Ширину bRH и площадь qRH поперечного сечения обтекаемой
током нижней части стержня в пазу по рис. 12.1, е рассчитывают
по (12.11)–(12.13), заменяя hR, bR и qR соответственно на hRН, bRН и qRН.
Коэффициент вытеснения тока в стержне
k R qC (qCB qRH ) ,
(12.17)
где qC – площадь полного сечение стержня по формуле (7.66), мм2;
qCB – площадь сечения верхней части стержня по (7.58), мм2; qRH – площадь сечения нижней части стержня, ограниченная глубиной проникновения hRH, мм2.
При расчетах удобнее учитывать изменение полного сопротивления фазы ротора, поэтому используют коэффициент общего увеличения активного сопротивления фазы ротора, обусловленного вытеснением тока в стержнях:
K R [r 2 rC (k R 1)] r 2 1 rC (k R 1) r 2 .
(12.18)
Приведенное к обмотке статора активное сопротивление фазы
ротора с учетом вытеснения тока, Ом,
r 2 / K R r 2 / .
(12.19)
Для учета влияния вытеснения тока на индуктивное сопротивление ротора считают ток равномерно распределенным по верхней
части стержня высотой hX. Коэффициент демпфирования kД = φ /, где
значения φ / определяют по рис. 12.3 для найденной по (12.4)–(12.6)
приведенной высоте стержня ξ.
203
Для стержней в закрытых
и полузакрытых трапецеидальных пазах (рис. 9.5, а, б, в, г)
коэффициенты магнитной проводимости пазового рассеяния
с учетом вытеснения тока в
стержнях λП2ξ рассчитывают
по формулам (9.52)–(9.55),
подставляя в них соответствующее значение kД . При опре1,0
2,0
3,0
ξ
делении магнитной проводиРис. 12.3. Зависимость φ / от ξ
мости перемычки над закры[φ / ≈ 3/( 2ξ ) при ξ > 4]
тым пазом по формулам (9.54),
(9.55) в формулы следует подставлять действительное (не приведенное) значение тока в стержне
ротора I2 при скольжении, соответствующем рассматриваемому режиму работы двигателя.
Коэффициент обусловленного вытеснением тока изменения индуктивного сопротивления фазы ротора
1,0 /
φ
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0
KX
П 2 Л 2 Д 2 СК
,
П 2 Л 2 Д 2 СК
(12.20)
где λП2, λЛ2, λД2, λСК – коэффициенты магнитной проводимости рассеяния, найденные в главе 9 для номинального режима.
Приведенное к обмотке статора индуктивное сопротивление
фазы ротора с учетом вытеснения тока, Ом,
x 2 / K X x 2 / .
(12.21)
Обычно приведенная высота верхней части литых стержней в
лопаточных пазах ξВ ≤ 1, поэтому вытеснения тока в верхней части
стержня не учитывают и принимают коэффициент демпфирования
для верхней части стержня kДВ = 1.
Для оценки изменения магнитной проводимости рассеяния
нижней части стержня вследствие вытеснения тока определяют приведенную высоту ξ стержня по формулам (12.4)–(12.6) для всей высоты стержня hC = hП2 – hS2 / (рис. 7.7). При ξ ≤ 1 поверхностный эффект практически не проявляется, и принимают коэффициент демпфирования нижней части стержня kДН = 1. При ξ > 1 определяют φ /
204
по рис. 12.3 и эквивалентную высоту части стержня с равномерным
распределением плотности тока
hX (hП 2 hS 2 / ) / .
(12.22)
Если hX > hB, то рассчитывают высоту обтекаемой током нижней части паза
hXH hX hB .
(12.23)
Коэффициент демпфирования, учитывающий уменьшение магнитной проводимости пазового рассеяния нижней части стержня за
счет вытеснения тока,
k ДН hXH hCH ,
(12.24)
где hCH – высота нижней части стержня (рис. 12.1, д, е) и размер hX
измерены в одних единицах длины.
Определяют ширину bXH, мм, и площадь поперечного сечения qXH, мм2, соответствующие размеру hXH, для стержней по
рис. 12.1, д по формулам (12.15), (12.16) с заменой hRH, bRH и qRH соответственно на hXH, bXH и qXH; для стержней по рис. 12.1, е – по
(12.11)–(12.13) с заменой hR, bR и qR соответственно на hXH, bXH и qXH.
Коэффициент, учитывающий распределение токов между верхней и нижней частями стержня:
X q XH (q XH qCB ) ,
(12.25)
где площади сечений qXH, qCB в одних единицах измерения.
Коэффициент магнитной проводимости рассеяния стержней в
лопаточных пазах (рис. 12.1, д, е) с учетом вытеснения тока
П 2 П 2 В Х2 П 2 Н ,
(12.26)
здесь λП2Вξ и λП2Нξ – коэффициенты магнитной проводимости пазового рассеяния верхней и нижней частей стержня ротора с учетом
вытеснения тока определяют по формулам (9.57)–(9.59) при подстановке в них значений kДВ и kДН, соответствующих расчетному режиму работы двигателя. Расчет λП2В по (9.57) выполняют для действительного (не приведенного) тока ротора I2 при расчетном режиме.
Коэффициент изменения индуктивного сопротивления фазы ротора с учетом поверхностного эффекта KX и приведенное к обмотке
статора индуктивное сопротивление фазы ротора с учетом вытесне-
205
ния тока x2 ξ / рассчитывают по формулам (12.20), (12.21).
В двигателях с всыпной обмоткой фазного ротора вследствие
малого сечения проводников поверхностный эффект практически отсутствует даже при работе в области больших скольжений.
Для двигателей со стержневой обмоткой фазного ротора применяют в основном реостатный пуск. Вследствие достаточно большого сопротивления пускового реостата изменение активного и реактивного сопротивлений обмотки фазного ротора за счет вытеснения тока не оказывает столь существенного влияния на пусковые
ток и момент, как в машинах с короткозамкнутым ротором.
Поэтому в двигателях с фазным ротором влиянием эффекта
вытеснения тока можно пренебречь.
При необходимости для двигателей с фазным ротором, работащих в области больших скольжений (s > sКР) с замкнутой накоротко
стержневой обмоткой, изменение параметров обмотки ротора за счет
вытеснения тока можно определить так же, как и для обмоток короткозамкнутых роторов.
12.2. Расчет параметров обмоток двигателя
с учетом насыщения зубцов статора и ротора
При работе двигателя со скольжением s > sКР токи в обмотках
в несколько раз превышают номинальные. Образованные этими токами магнитные потоки рассеяния увеличиваются, что приводит к
насыщению коронок зубцов статора и ротора. Магнитное сопротивление заштрихованных участков коронок зубцов (рис. 12.4) увеличивается. Вследствие этого снижаются коэффициенты магнитной проводимость для потоков пазового λП и дифференциального λД рассеяния. Насыщение стали зубцов практически не влияет на магнитную
проводимость лобового рассеяния и λЛ = Const.
Из-за сложности точного учета явлелений, связанных с насыщением отдельbSN = bS + cЭ
ных участков магнитной цепи, в расчетbS
ной практике используют приближенные
способы. Наиболее часто применяют приближенный метод эквивалентного расНасыщенные участки
крытия паза.
коронок зубцов
В соответствии с этим методом наРис. 12.4. К учету
сыщение коронок зубцов учитывают ввенасыщения зубцов
дением дополнительного раскрытия паза
206
шириной сЭ (рис. 12.4), приводящим к эквивалентному уменьшению
магнитной проводимости пазового рассеяния ΔλП. При этом принимают магнитную проницаемость стали в зубцах μСТ = ∞ и коэффициенты магнитной проводимости пазового рассеяния рассчитывают
по обычным формулам, приведенным в главе 9.
С увеличением тока в обмотке увеличивается насыщение коронок зубцов, эквивалентное раскрытие сЭ паза и ΔλП, а коэффициенты магнитной проводимости λП, λД и индуктивное сопротивление обмотки уменьшаются. При этом ток в обмотке увеличивается, что
приводит к изменению насыщения коронок зубцов. Вследствие взаимного влияния сЭ и тока в обмотке расчет сЭ и коэффициентов
магнитной проводимости λП и λД проводят методом последовательных приближений.
Первоначально задают обусловленную уменьшением индуктивных сопротивлений обмоток за счет насыщения зубцов статора и
ротора ожидаемую кратность увеличения тока статора kNП = I1NП /I1,
где I1 – ток статора, найденный без учета насыщения для данного
режима работы двигателя; I1NП – ожидаемый ток статора в том же
режиме с учетом насыщения коронок зубцов потоками рассеяния.
Ориентировочно при расчете пусковых режимов (s ≈ 1) принимают
kNП = 1,25–1,45; при расчете режима максимального момента (s = sКР)
kNП = 1,1–1,2. Для машин с закрытыми и полузакрытыми пазами выбирают большие значения kNП, при полуоткрытых пазах – меньшие.
Ожидаемое значение тока статора с учетом насыщения, А,
I1NП k NП I1 .
(12.27)
Средняя расчетная МДС, отнесенная к одному пазу статора, А:
FПCР 0,7 I1NП u П1 (k / kУ1 kО1 z1 z2 ) a 1 ,
(12.28)
где I1NП – ожидаемый ток статора с учетом насыщения зубцов, А;
uП1 – число эффективных проводников в пазу статора; kβ / – коэффициент, учитывающий уменьшение МДС паза за счет укорочения шага обмотки по формулам (9.18), (9.19); kУ1 – коэффициент укорочения
по (6.9); kO1 – обмоточный коэффициент по (6.8); z1, z2 – число пазов
статора и ротора; a1 – число параллельных ветвей обмотки статора.
По МДС FПСР определяют фиктивную индукцию в зазоре, Тл,
BФ FПСР 10 6 (1,6 CN ) ,
здесь δ – зазор, м;
(12.29)
207
CN 0,64 2,5 (t Z1 t Z 2 ) ,
(12.30)
где tZ1, tZ2 – зубцовые (пазовые) деления статора и ротора; все размеры в (12.30) выражены в одних единицах длины.
Для фиктивной индукции BФδ по рис. 12.5 определяют коэффифициент χδ, характеризующий
χδ
отношение потока рассеяния с
учетом насыщения к потоку
0,8
рассеяния без учета насыщения.
Дополнительное раскрытие
0,6
пазов статора, мм,
cЭ1 (t Z1 bS1 ) (1 ) . (12.31)
0,4
0,2
0
2
4
6
8 ВФδ, Тл
Рис. 12.5. Зависимость χδ = f (BФδ)
Обусловленное насыщением зубцов уменьшение коэффициента магнитной проводимости
рассеяния пазов статора:
открытого (рис. 12.6, а)
П1N hК cЭ1 [bS1 (bS1 cЭ1 )] ;
(12.32)
полуоткрытого (рис. 12.6, б)
П1N
hS1 cЭ1
hК cЭ1
;
bS1 (bS1 cЭ1 ) (bS1 bП1 ) (bS1 bП1 cЭ1 )
(12.33)
полузакрытого (рис. 12.6, в, г)
П1N [cЭ1 (hS1 0,58 hК )] [bS1 (cЭ1 1,5 bS1 )] .
(12.34)
В формулах (12.31)–(12.34) все размеры в одних единицах измерения.
Коэффициент магнитной проводимости пазового рассеяния с
учетом насыщения зубцов машины
П1N П1 П1N .
(12.35)
Коэффициент магнитной проводимости дифференциального
рассеяния фазы статора с учетом насыщения зубцов машины
Д1N Д1 ,
(12.36)
В формулах (12.35), (12.36) λП1 , λД1 – коэффициенты магнитной
проводимости рассеяния, определенные в параграфе 9.1 для режима
номинальной нагрузки; значения χδ по рис. 12.5.
д)
hК
b1
bП2
е)
/
hS2
/
hS2
hК
hS1
hК
/
bS 2
b1
bS1
в)
hS2
bS2
bS1
б)
hS2
а)
b1
hS1
hК
bS1
hS2
bS2
hS2
bS1(bS2)
bП1
b1
b1
ж)
з)
hК
hК
bП1(bП2)
hS1
208
г)
bВ
и)
Рис. 12.6. К учету влияния насыщения коронок зубцов
Индуктивное сопротивление фазы статора с учетом насыщения
зубцов от полей рассеяния, Ом,
x1N x1 1N x1
1
( П 1 N Д 1N Л 1 )
( П 1 Д 1 Л 1 )
.
(12.37)
Дополнительное раскрытие пазов ротора, мм,
cЭ 2 (t Z 2 bS 2 ) (1 ) .
(12.38)
Уменьшение коэффициента магнитной проводимости рассеяния
пазов ротора:
открытого при hS2 = hК (рис. 12.6, а) и полузакрытого (рис. 12.6, д, е)
П 2 N hS 2 cЭ 2 [bS 2 (bS 2 cЭ 2 )] ;
(12.39)
закрытого с насыщающимся мостиком над пазом (рис. 12.6, ж)
П 2 N hS 2 cЭ 2 [bS 2 (bS 2 cЭ 2 )] S 2 S 2 N ;
( 12.40 )
закрытых (рис. 9.5, в, г; рис. 12.6, з) и лопаточных пазов (рис. 12.6, и)
П 2 N S 2 S 2 N ,
(12.41)
здесь коэффициенты магнитной проводимости λS2ξ и λS2ξ N находят
по формуле (9.55): λS2ξ – с учетом поверхностного эффекта, но без
учета насыщения зубцов при токе стержня ротора в номинальном
режиме работы двигателя I2 = I2Н; λS2ξ N – с учетом вытеснения тока
и насыщения зубцов при соответствующем расчетному режиму токе
209
стержня I2 = I2N (способ определения или задания тока I2N рассмотрен в параграфе 12.3).
Ток стержня ротора I2, А, можно рассчитать по приведенному
к обмотке статора фазному току I2 / ротора
I2 I I2/ ,
(12.42)
где νI – коэффициент приведения токов короткозамкнутого ротора,
определяемый по формуле (7.33).
Коэффициент магнитной проводимости пазового рассеяния ротора с учетом вытеснения тока и насыщения зубцов машины
П 2 N П 2 П 2 N .
(12.43)
Коэффициент магнитной проводимости дифференциального
рассеяния фазы ротора с учетом насыщения зубцов машины
Д 2 N Д 2 .
(12.44)
В формулах (12.43), (12.44) приведены коэффициенты магнитной
проводимости пазового рассеяния λП2ξ ненасыщенной зубцовой зоны
с учетом вытеснения тока, найденный в параграфе 12.1, и дифференциального рассеяния ротора λД2, рассчитанный по формуле (9.41)
для режима номинальной нагрузки; значения χδ по рис. 12.5.
Приведенное к обмотке статора индуктивное сопротивление
фазы ротора с учетом вытеснения тока в стержнях ротора и насыщения зубцов машины потоками рассеяния, Ом,
x 2 N / x2 /
( П 2 N Д 2 N Л 2 СК )
2 N
,
x2 /
(
)
2
П2
Д2
Л2
СК
(12.45)
где коэффициенты магнитных проводимостей рассеяния λП2, λД2, λЛ2,
λСК и сопротивление x2 / определены в параграфе 9.3 для режима
номинальной нагрузки.
Параметры двигателя x1N и x2ξ N / используют при расчете режимов работы со скольжением s ≥ sКР. Рассчитанный по этим параметрам ток статора I1N должен отличаться от предварительно найденного по формуле (12.27) тока I1NП не более чем на (10–15) %. В противном случае следует изменить предварительно выбранное значение коэффициента kNП и повторить расчет параметров обмоток и
тока статора I1N до выполнения указанного выше условия.
210
Большинство двигателей с фазным ротором при s ≥ sКР работают с добавочными сопротивлениями, включенными в цепь обмотки
ротора, и токи в обмотках машины редко превышают номинальные
более чем в 1,5–2 раза. При таких токах насыщение зубцов потоками рассеяния незначительно и изменение сопротивлений x1N и x2ξ N /
за счет насыщения мало. Поэтому принимают kNП = 1 и считают индуктивные сопротивления обмоток не зависящими от насыщения.
Необходимость учета влияния насыщения на индуктивные сопротивления машин с фазным ротором может возникнуть при анализе режимов работы с s ≥ sКР без добавочных сопротивлений в цепи ротора. В этом случае изменение параметров за счет насыщения
определяют так же, как и для машин с короткозамкнутым ротором.
12.3. Расчет пусковых характеристик
Пусковые свойства двигателей характеризуют начальным пусковым МП и максимальным ММ моментами и пусковым током IП.
В двигателях с фазным ротором пусковые момент и ток определяются в основном сопротивлением пускового реостата. Поэтому
в таких машинах регламентируется только максимальный момент,
характеризующий перегрузочную способность двигателя.
У двигателей с короткозамкнутым ротором пусковые момент и
ток зависят только от соотношения параметров обмоток и не могут
быть изменены в процессе эксплуатации машины. Поэтому начальный пусковой момент МП и пусковой ток IП, а также максимальный
момент ММ не должны быть меньше определяемых стандартами.
Значения пускового тока, начального пускового и максимального моментов двигателей общего назначения современных серий в
относительных единицах приведены в табл. 12.1.
Расчет пусковых характеристик осложнен необходимостью учета изменения параметров обмоток вследствие вытеснения тока в обмотке ротора и насыщения зубцовой зоны машины потоками рассеяния, так как при больших скольжениях частота тока в роторе велика и токи в обмотках могут превышать номинальные в 5–7 раз.
Для упрощения расчетов режимов работы со скольжениями s ≥ sКР пренебрегают сопротивлением r12 (рис. 11.1) схемы замещения, так как при токах, превышающих номинальные, электрические потери в обмотках много больше магнитных потерь, для учета
которых в схему замещения и введено сопротивление r12
Таблица 12.1
Начальные пусковой ток I*П и момент М*П , максимальный момент М*М асинхронных двигателей
Испол- h, мм
нение 2р
I*П
2
6,5–7,5
4
5,0–7,5
≤ 132
М*П
1,6–2,2
2,0–7,3
211
160 – 250
≥ 280
М*М
I*П
М*П
М*М
I*П
М*П
М*М
2,2–2,8 7,0–7,5 1,4–2,2 2,2–3,0 6,5–7,0 1,0–1,4 1,9–2,5
2,2–3,0 6,5–7,5 1,2–1,9 2,3–2,9 6,0–7,0 1,2–1,6 2,0–2,2
(2,2–2,5)
(2,5–4,0)
(2,1–2,2)
IP44
6
4,0–7,0 2,0–2,2 2,2–2,5 6,0–6,5 1,2–2,0 2,0–2,7 6,5–7,0 1,0–1,6 2,0–2,4
(IP54)
(2,3–2,5)
(2,5–4,0)
(2,1–2,2)
8
4,0–6,0 1,6–1,9 1,7–2,6 5,5–6,0 1,2–1,6 2,0–2,4 5,5–6,5 1,2–1,3 2,0–2,3
(2,2–3,0)
(2,1–2,2)
10
—
—
—
5,5–6,0 1,2–1,3 1,9–2,0
6,0
1,0
1,8–1,9
12
—
—
—
—
—
—
6,0
1,0
1,8
2
—
—
—
7,0
0,9–1,3 1,7–2,5
6,5
0,8–1,2 1,6–2,2
4
—
—
—
6,5
1,0–1,4 1,7–2,5
6,5
0,8–1,2 1,6–2,0
(2,3–3,5)
(2,0–2,2)
IP23
6
—
—
—
6,0–7,0 1,0–1,3 1,7–2,1 6,0–6,5 0,9–1,2 1,6–2,0
(1,9–3,0)
(1,8–2,2)
8
—
—
—
5,5–6,0 1,1–1,3 1,7–2,0
5,5
0,9–1,2 1,6–1,9
(1,8–2,5)
(1,7–2,2)
10
—
—
—
—
—
—
5,0–5,5
1,0
1,8
—
—
—
—
—
—
(1,7–1,8)
12
—
—
—
—
—
—
5,5
1,0
1,8
—
—
—
—
—
—
(1,7–1,8)
П р и м е ч а н и я: 1. В скобках приведены значения М*М для двигателей с фазным ротором.
2. В двигателях с h ≤ 80 мм при 2р = 2 I*П = 3,5–6; при 2р = 4 I*П = 2,5–4,5; при 2р ≥ 6 I*П = 3,0–4,0.
212
При больших токах увеличивается падение напряжения на сопротивлении обмотки статора. Вследствие этого уменьшаются ЭДС,
основной магнитный поток и насыщение магнитопровода на пути
основного потока (за исключением коронок зубцов). С уменьшением насыщения сердечников увеличивается индуктивное сопротивление взаимоиндукции x12, и при расчете пусковых режимов (s ≥ 0,1
или s ≥ sКР при sКР < 0,1) принимают
x12П x12 FЦ F k x12 ,
(12.46)
где kμ – коэффициент насыщения, определяемый по формуле (8.76);
x12 – сопротивление взаимоиндукции для режима номинальной нагрузки по формуле (11.3); сопротивления x12 и x12П в Омах.
При принятых выше допущениях коэффициент
C1П 1 x 1 x 12П .
(12.47)
Сопротивление главной ветви схемы замещения (рис. 11.1) без
учета насыщения зубцов полями рассеяния, Ом,
Z П С1П ( RП j X П ) ,
(12.48)
RП r1 C1П r 2 / s ;
(12.49)
X П x 1 C1П x 2 / .
(12.50)
где
При расчетах сопротивления x2ξ / в формуле (12.50) для роторов
со стержнями в закрытых пазах (рисунки 7.5, б, в; 7.6; 7.7) коэффициент магнитной проводимости пазового рассеяния λП2ξ определяют по
формулам (9.52)–(9.59) для действительного (не приведенного) тока
стержня в номинальном режиме I2 = I2Н. Ток I2Н рассчитывают по
формуле (12.42), подставляя в нее приведенный фазный ток ротора I2Н /, найденный при расчете рабочих характеристик для номинального скольжения sН (табл. 11.1).
Ток в обмотке ротора, А,
I 2 / C1П I 2 // C1П U1H
Z П U1H
RП2 X П2 .
(12.51)
Полное сопротивление схемы замещения в пусковых режимах
ZCX j C1П x 12П ( RП j X П ) [ RП j ( X П x 12П )] .
(12.52)
213
Из формул (12.48)–(12.52) ток в обмотке статора, А,
I1 U1H | ZCX | I 2 / RП2 ( X П x 12П ) 2 (С1П x 12П ) .
(12.53)
Кратность тока и момента при заданном скольжении s:
I *1 I1 I1H ;
(12.54)
M * ( I 2 / I 2 H / ) 2 K R sH s ,
(12.55)
где I1H, I2H / – токи обмоток, А, из данных расчета рабочих характеристик при номинальном скольжении sH (табл. 11.1).
С помощью соотношений (12.46)–(12.53) рассчитывают токи и
моменты двигателя при изменении скольжения от s = 1 до s = 0,1
или до sКР (если sКР < 0,1) в последовательности, указанной в формуляре расчета (табл. 12.2). Критическое скольжение приближенно
находят по рассчитанным в главе 9 параметрам рабочего режима
sКР r 2 / ( x 1 C1П x 2 / ) .
(12.56)
Если при s ≥ 0,1 полный ток паза I1П = (uП1I1/a1) ≥ 400 А, необходимо учесть влияние насыщения коронок зубцов потоками рассеяния на пусковые характеристики. Для расчетов используют зависящие от токов сопротивления x1N, x2N / и коэффициент
C1ПN 1 x 1N x 12П .
(12.57)
Вследствие взаимной зависимости токов в обмотках и сопротивлений x1N, x2N / прямое определение сопротивлений и токов невозможно и их находят методом последовательных приближений.
С целью уменьшения объема расчетов рекомендуется следующий метод первоначального задания токов.
Для режима работы со скольжением s = 1 задают ожидаемую
кратность увеличения тока kNП (см. параграф 12.2) и, подставив в
формулу (12.27) найденное без учета насыщения значение тока I1 из
табл. 12.2 (при s = 1), определяют ожидаемое значение тока статора
с учетом насыщения I1NП. Если предварительный расчет пускового
тока с учетом поверхностного эффекта не проводился, то ожидаемый ток I1NП можно ориентировочно найти по номинальному току I1Н и выбранной из табл. 12.1 кратности пускового тока I*П.
214
Таблица 12.2
Формуляр расчета пусковых характеристик асинхронного двигателя
с учетом вытеснения тока в стержнях ротора (без учета насыщения):
Р2Н = … кВт; U1H = … В; I1H = … А; I2Н / = … А; 2р = … ; sH = … ;
/
x1 = …Ом; x2 / = …Ом; x12П = …Ом; С1П = …; r1 = …Ом; r2 = …Ом
№
п/п
Расчетная формула
1
2
3
4
ξ = 2πhC√(bC /bП)( f2 /ρC) ·10
φ = f (ξ )
1
hR = hC / ( 1+ φ ) или hRH
5
KR = 1 + rC (kR – 1) /r2
/
/
r2ξ = KR r2
1
kД = φ / (ξ ) или kДН
λП2ξ
λП2ξ + λЛ2 + λД2 + λСК
KX =
λП2 + λЛ2 + λД2 + λСК
6
7
8
9
Единица Скольжение s, о.е.
измере1,0 0,8 … 0,2 0,1 sКР
ния
–7
kR = qC /qR или kR = qC /(qCB + qRН)
/
10 x2ξ = KX x2
—
—
мм
1
/
/
/
14
I1 I 2
/
RП2 X П2
RП2 ( X П x12П ) 2
C1П x 12П
15 I *1 = I1 /I1H
/
/ 2
16 M * ( I 2 I 2 H ) K R sH s
1
Ом
—
—
—
Ом
11 RП = r1 + С1П r2ξ /s
/
12 XП = x1 + C1П x2ξ
13 I2 = U1H
—
—
Ом
Ом
А
А
—
—
Для стержней в лопаточных пазах.
Пользуясь рекомендациями подраздела 12.2, рассчитывают сопротивления x1N, x2ξ N / и по формуле (12.57) коэффициент C1ПN.
При расчетах сопротивления x2ξ N / роторов с закрытыми пазами
(рис. 7.5, б, в; 7.6; 7.7) коэффициент магнитной проводимости пазового рассеяния λП2ξ N определяют по формулам (9.52)–(9.59) для тока
215
в стержне ротора I2N ≈ kNП I2 , где ток I2 находят по формуле (12.42),
подставив в нее приведенный ток ротора I2 / из табл. 12.2 при соответствующем скольжении s.
Далее рассчитывают ток статора I1N и коэффициент kN с учетом влияния насыщения (пункты 15–19 табл. 12.3). Если различие kN
и kNП или I1N и I1NП не превышает 10–15 %, то расчет режима работы с s = 1 считают законченным. При больших расхождениях корректируют первоначальное значение kNП и повторяют расчет.
Аналогично рассчитывают остальные точки пусковых характеристик при скольжениях s ≠ 1. Уменьшить объем расчетов этих точек можно следующим образом.
В режимах работы машины с s = 0,1–0,15 насыщение зубцов
полями рассеяния невелико. Поэтому для скольжения s = 0,1 или
s = sКР (при sКР < 0,1) задают начальное значение kNП = 1,05–1,15 и
так же, как при s = 1, рассчитывают ток статора I1N и коэффициент kN с учетом влияния насыщения. При различии kN и kNП или
I1N и I1NП менее 10–15 % расчет режима работы с выбранным сколжением s = 0,1 или s = sКР считают законченным.
Исходя из линейного закона изменения kNП в диапазоне скольжений от 1 до 0,1 или до sКР, для каждого расчетного значения s
выбирают начальное значение kNП. Для всех скольжений s рассчитывают ток I1N и коэффициент kN до достижения различия коэффициентов kN и kNП или токов I1N и I1NП менее 10–15 %.
Формулы для расчета пусковых характеристик с учетом насыщения зубцов и поверхностного эффекта в стержнях ротора сведены в формуляр (табл. 12.3).
После расчета всех точек пусковых характеристик уточняют
критическое скольжение
s КР
r 2 /
/
( x 1N C1ПN x 2 N )
(12.58)
и кратность максимального момента M*M (последняя колонка в
табл. 12.3). В формуле (12.58) сопротивления r2ξ /, x1N, x2ξ N / и коэффициент C1ПN определяют для предварительного значения sКР, рассчитанного по формуле (12.56).
По результатам расчета (табл. 12.3) чертят пусковые характеристики асинхронного двигателя (рис. 12.7).
216
Таблица 12.3
Формуляр расчета пусковых характеристик асинхронного двигателя
с учетом вытеснения тока в стержнях ротора и насыщения зубцов
сердечников магнитными потоками рассеяния обмоток:
Р2Н = … кВт; U1H = … В; I1H = … А; I2Н / = … А; 2р = … ; sH = … ;
/
x1 = …Ом; x2 / = …Ом; x12П = …Ом; r1 = …Ом; r2 = …Ом; СN = ….
Единица Скольжение s, о.е.
измерения 1,0 0,8 … 0,2 0,1 sКР
№
п/п
Расчетная формула
1
2
3
kNП
I1NП = kNП I1, где I1 по табл. 12.2
FПСP = 0,7I1NП uП1 (kβ / + kУ1kO1z1/z2)/a1
—
А
4
BФ FПСР 10 6 (1,6 CN )
Тл
—
мм
—
А
8
χδ = f ( BФδ )
cЭ1 (t Z1 bS1 ) (1 )
П1N П1 П1N
Д1N Д1
9
x1N x 1 1N 1
Ом
10 C1ПN 1 x 1N x 12П
11 cЭ 2 (t Z 2 bS 2 ) (1 )
12 П 2 N П 2 П 2 N
—
мм
—
13 Д 2 N Д 2
—
5
6
7
—
14
x 2 N / x2 / 2 N 2
Ом
15
RПN r1 C1ПN r 2 / s
Ом
16
X ПN x 1N C1ПN x 2 N /
Ом
17
I 2 N / U1H
А
2
2
RПN
X ПN
18
I1N I 2 N
2
RПN
( X ПN x12П ) 2
(C1ПN x 12П )
А
19
kN = I1N /I1, где I1 по табл. 12.2
—
20
I *1 = I1N /I1H
—
/
/
/ 2
21 M * ( I 2 N I 2 H ) K R sH s
—
217
I*1 М*
6
I*1
4 2
М*
Полученные в результате расчета пусковой ток I*П, начальный
пусковой M*П и максимальный М*М
моменты следует сравнить с данными табл. 12.1. Расчет выполнен
удовлетворительно, если расчетные
значения I*П, M*П, М*М находятся в
пределах, указанных в табл. 12.1.
2 1
0
0,4
0,8 s
Рис. 12.7. Пусковые характеристики двигателя
13. ТЕПЛОВОЙ РАСЧЕТ ДВИГАТЕЛЯ
Точный тепловой расчет асинхронного двигателя /15, 16/ сложен и является самостоятельной задачей. Ниже рассмотрен приближенный метод расчета нагрева наиболее ответственной части двигателя – изолированных обмоток, перегрев и выгорание изоляции которых делает машину непригодной к дальнейшей эксплуатации. В методике расчета использованы усредненные значения коэффициентов
теплоотдачи α с охлаждаемых поверхностей и теплопроводности λ
изоляции обмоток, характерные для конструкций, применяемых материалов и технологии производства двигателей серий 4А и АИ.
Нагрев обмоток рассчитывают для наиболее неблагоприятного
режима работы с предельно допустимой для выбранной изоляции
температурой: при классе нагревостойкости изоляции В – 120 °С, при
классе F – 140 °С. При этом электрические потери в обмотках увеличиваются по сравнению с режимом работы при расчетной температуре пропорционально увеличению удельного сопротивления меди
обмоток ρ , что учитывают коэффициентом увеличения электрических потерь k . Для обмоток с изоляцией класса нагревостойкости В
k = ρ120 /ρ75 = 1,15; класса нагревостойкости F k = ρ140 /ρ115 = 1,07.
Электрические потери в обмотке статора делят на потери в
пазовых рЭП1 и лобовых рЭЛ1 частях катушек, Вт,
218
pЭП1 2 l1 k pЭ1 lW 1 ;
(13.1)
pЭЛ 1 2 l Л 1 k pЭ1 lW 1 ,
(13.2)
здесь рЭ1 – электрические потери в обмотке статора, Вт, из табл. 11.1
при номинальном скольжении sН ; длина статора l1, лобовой части lЛ1
и средняя длина витка lW1 даны в одних единицах измерения.
Превышение температуры внутренней поверхности сердечника
статора над температурой воздуха внутри машины, °С,
ПC K ( pЭП 1 pМОСН ) ( D1 l 1 1 ) ,
(13.3)
где K – коэффициент, учитывающий часть потерь в пазовой части
обмотки и сердечнике статора, передаваемых воздуху внутри машины (табл. 13.1); рМОСН – основные магнитные потери в сердечнике
статора, Вт; D1 и l1 – внутренний диаметр и длина сердечника статора, м; α1 – коэффициент теплоотдачи с поверхности сердечника статора внутреннему воздуху, Вт/(м2·°С), определяют по рис. 13.1.
Таблица 13.1
Средние значения коэффициента K в формуле (13.3)
Исполнение двигателя
по степени защиты
IP44, IP54
IP23
2
0,22
0,84
Число полюсов двигателя 2р
4
6
8
10
0,20
0,19
0,18
0,17
0,80
0,78
0,76
0,74
12
0,16
0,72
Перепад температуры в изоляции пазовой части обмотки статора, °С,
pЭП1 bИЗ1
b1 b 2
(13.4)
ИП1
,
z1 П П1 l1 ЭКВ 16 ЭКВ /
здесь все размеры приведены в метрах; z1 – число пазов статора;
П1 – расчетный периметр условной поверхности охлаждения паза
статора, м: для полузакрытых трапецеидальных пазов (рис. 6.4)
П П1 2 (hП1 hS1 hК ) b1 b2 ,
(13.5)
для прямоугольных полуоткрытых пазов (рис. 6.5)
П П1 2 (hП1 bП1 ) ;
bИЗ1 – односторонняя толщина изоляции в пазу статора, м.
(13.6)
219
α1, Вт/(м2·°С)
2
α1, Вт/(м ·°С)
160
2p = 2
2p = 2
200
120
2p = 6
2p = 4
2p = 4
160
80
2p = 8
40
0,08 0,12 0,16 0,20 0,24 DА, м
a)
α1, Вт/(м2·°С)
2p = 2
2p = 6
120
80
0,26 0,30 0,34 0,38 0,42
г)
α1, Вт/(м2·°С)
160
2p = 6
2p = 4
2p = 8
DА, м
2p = 2
2p = 4
150
120
130
80
2p = 8
0,26 0,30 0,34 0,38 0,42
б)
DА, м
α1, Вт/(м2·°С)
110
2p = 8
90
2p = 10
2p = 12
70
0,5 0,54 0,58 0,62 0,66 DА, м
д)
2p = 2
120
2p = 6
2p = 4
2p = 6, 8
Рис. 13.1. Средние значения коэффициента теплоотдачи α1 асин2p = 10
хронных двигателей на напряже80
2p = 12
ние до 660 В со степенью защиты:
60
IP44, IP54 при высотах оси враще0,5 0,54 0,58 0,62 0,66 DА, м ния h ≤ 132 мм (а), h = 160–250 мм
в)
(б), h = 280–355 мм для продуваемых роторов с аксиальными каналами в сердечнике (в);
IP23 при высотах оси вращения h = 160–250 мм (г), h = 280–355 мм (д).
100
Для всыпных обмоток bИЗ1 выбирают по табл. 4.6 или 4.7, для
обмоток из провода прямоугольного сечения в полуоткрытых пазах
bИЗ1 0,5 (bП1 pШ b) ,
(13.7)
где рШ , b – число элементарных проводников по ширине паза и ширина элементарного проводника.
220
/
λЭКВ , Вт/(м·°С)
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0,5
0,7 0,8 0,9 d/dИЗ
Рис. 13.2. Средние значения
коэффициента теплопроводности λЭКВ / внутренней изоляции
катушки из эмалированного
провода круглого сечения
0,6
ИЛ 1
В формуле (13.4) для изоляции классов наревостойкости В
и F принимают средний коэффициент теплопроводности пазовой
изоляции λЭКВ = 0,16 Вт/(м·°С).
Значение среднего коэффициента теплопроводности внутренней изоляции λЭКВ /, Вт/(м·°С),
катушки из круглого провода с
учетом неплотной укладки проводников и неполного исключения воздушных прослоек между
проводами при пропитке определяют по рис. 13.2 в зависимости от соотношения диаметров
провода d/dИЗ. Для обмоток из
провода прямоугольного сечения
в формуле (13.4) принимают
(b1 + b2) / (16 λЭКВ /) = 0.
Перепад температуры в изоляции лобовых частей обмотки
статора, °С,
bИЗЛ 1
pЭЛ 1
hП1
,
2 z1 П Л 1 l Л 1 ЭКВ 12 ЭКВ /
(13.8)
здесь все размеры приведены в метрах; ПЛ1 – периметр поперечного
сечения условной поверхности охлаждения лобовой части катушки
обмотки статора, м, приближенно принимают ПЛ1 ≈ ПП1; lЛ1 – длина
лобовой части, м; bИЗЛ1 – односторонняя толщина изоляции лобовой
части, м, значение bИЗЛ1 выбирают по табл. 4.6, 4.7, 4.9; при отсутствии изоляции лобовых частей bИЗЛ1 = 0.
В формуле (13.8) принимают значения коэффициентов теплопроводности λЭКВ = 0,16 Вт/(м·°С); λЭКВ / по рис. 13.2. Для обмоток
из провода прямоугольного сечения принимают hП1 / (12 λЭКВ /) = 0.
Превышение температуры наружной поверхности лобовых частей обмотки статора над температурой воздуха внутри двигателя, °С,
ПЛ1 K pЭЛ 1 (2 D1 lВЫЛ1 1 ) ,
(13.9)
здесь lВЫЛ1 – длина вылета лобовой части обмотки статора, м; обо-
221
значения и размерность других величин соответствуют принятым в
формулах (13.2), (13.3).
Среднее превышение температуры обмотки статора над температурой воздуха внутри двигателя, °С,
1/ [2 l1 (ПС ИП1 ) 2 l Л 1 (ПЛ1 ИЛ1 )] lW 1 . (13.10)
Среднее превышение температуры воздуха внутри машины над
температурой окружающей среды, °С, определяют, пренебрегая перепадом температуры в стенке станины вследствие ее малой толщины:
B Σ pB / (S КОР B ) ,
(13.11)
где Σ рВ / – сумма потерь, отдаваемая воздуху внутри машины, Вт;
SКОР – расчетная поверхность охлаждения машины, м2; αВ – коэффициент теплоотдачи с поверхности корпуса охлаждающему воздуху, Вт/(м·°С).
Для двигателей со степенью защиты IP23 отводимая внутренним воздухом сумма потерь мощности, Вт,
Σ pB / Σ p / (1 K ) ( pЭП1 pМОСН ) ,
(13.12)
Σ p / Σ p (k 1) ( pЭ1 pЭ 2 ) ,
(13.13)
здесь
здесь Σ р – сумма всех потерь мощности, Вт, при номинальном режиме и расчетной температуре обмотки (табл. 11.1); рЭ1, рЭ2 – электрические потери мощности, Вт, в обмотках при номинальном режиме и расчетной температуре обмоток (табл.11.1).
Расчетная поверхность охлаждения корпуса двигателей со степенью защиты IP23 относительно невелика и принимается примерно равной поверхности станины, м2,
S КОР DA (l1 2 lВЫЛ1 ) .
(13.14)
Для двигателей со степенями защиты IP44, IP54 из Σ рВ / исключают мощность, потребляемую вентилятором наружного обдува, которая составляет примерно 0,9 суммы полных механических потерь:
Σ pB / Σ p / (1 K ) ( pЭП1 pМОСН ) 0,9 pМЕХ ,
(13.15)
где Σ р / – рассчитывают по формуле (13.13).
В двигателях со степенями защиты IP44, IP54 основной отвод
222
тепла идет с оребренной внешней поверхности станины и расчетная
поверхность охлаждения, м2, включает в себя поверхность ребер:
S КОР ( DA 8П Р ) (l1 2l ВЫЛ1 ) , (13.16)
0,56 ПР, м
где ПР – условный периметр поперечного
сечения ребер станины, м, определяют по
рис. 13.3.
Значения коэффициента теплоотдачи αВ с поверхности корпуса в формуле (13.11) находят по рис. 13.4, 13.5.
Среднее превышение температуры
обмотки статора над температурой окружающей среды, °С,
0,48
0,40
0,32
0,24
0,16
0,08
0
h,мм
120
240
360
1 1/ B .
Рис. 13.3. Условный периметр ребер станины
(13.17)
Вследствие приближенного характера
расчета превышение температуры обмотки Δ1 должно быть на 10 % меньше предельно допустимого значения Δ ДОП. Для изоляции класса нагревостойкости В Δ ДОП = 80 °С;
класса нагревостойкости F Δ ДОП = 100 °С.
αB, Вт/(м2·°С)
30
2p = 6
αB, Вт/(м2·°С)
30
2p = 6
2p = 2, 4
20
20
2p = 8
10
0,08 0,12 0,16 0,20 0,24 DА, м
a)
αB, Вт/(м2·°С)
30
2p = 2, 4
2p = 6 2p = 4
2p = 8
20
2p = 10 2p = 12
10 2p = 2
0,5 0,54 0,58 0,62 0,66 DА, м
в)
2p = 8
10
0,26 0,30 0,34 0,38 0,42
DА, м
б)
Рис. 13.4. Средние значения коэффициента теплоотдачи αВ с поверхности корпуса асинхронных
двигателей с исполнениями по
степени защиты IP44, IP54 и высотой оси вращения h ≤ 132 мм (а),
h = 160–250 мм (б), h = 280–355 мм
для продуваемых роторов с аксиальными каналами в сердечнике
ротора (в)
223
2
αB, Вт/(м ·°С)
αB, Вт/(м2·°С)
2p = 2
2p = 2, 4
1400
2p = 4
1000
2p = 6
1000
800
2p = 6
2p = 8
2p = 10
2p = 12
2p = 8 600
600
0,5 0,54 0,58 0,62 0,66 DА, м
0,26 0,30 0,34 0,38 0,42
DА, м
a)
б)
Рис. 13.5. Средние значения коэффициента теплоотдачи αВ с поверхности корпуса асинхронных двигателей с исполнением по степени защиты IP23 и высотами оси вращения h = 160–250 мм (а), h ≥ 280 мм (б)
Превышение температуры обмотки фазного ротора над температурой окружающей среды рассчитывают аналогично.
Превышение температуры внешней поверхности сердечника ротора над температурой воздуха внутри машины, °С,
ПP pЭП 2 ( D2 l2 2 ) ,
(13.18)
где рЭП2 – электрические потери в пазовой части обмотки ротора, Вт,
pЭП 2 2 l 2 k pЭ 2 lW 2 .
(13.19)
В формулах (13.18), (13.19) D2 и l2 – наружный диаметр и длина
сердечника ротора, м; α2 – коэффициент теплоотдачи с поверхности
сердечника ротора внутреннему воздуху, Вт/(м2·°С), определяют по
рис. 13.6 в зависимости от степени защиты двигателя; рЭ2 – электрические потери в обмотке ротора, Вт, из табл. 11.1 при номинальном
скольжении sН; lW2 – средняя длина витка обмотки ротора, м. Для
защищенных двигателей (исполнение IP23) с аксиальной системой
вентиляции (рис. 3.11) найденное по рис. 13.6,г значение α2 следует
увеличить в 3,5–4 раза.
Перепад температуры в изоляции пазовой части обмотки рототора, °С,
b1 b 2
pЭП 2 bИЗ 2
(13.20)
ИП 2
,
z 2 П П 2 l2 ЭКВ 16 ЭКВ /
здесь z2 – число пазов ротора; П2 – расчетный периметр условной
поверхности охлаждения паза ротора, м:
224
для полузакрытых трапецеидальных пазов (рис. 7.1)
П П 2 2 ( hП 2 hS 2 hК ) b1 b 2 ,
(13.21)
для прямоугольных полузакрытых пазов (рис. 7.2)
П П 2 2 (hП 2 bП 2 ) ;
(13.22)
bИЗ 2 – односторонняя толщина изоляции в пазу ротора, м, для всыпных обмоток bИЗ2 выбирают по табл. 4.6, для стержневых обмоток
из провода прямоугольного сечения в полузакрытых пазах
bИЗ 2 0,5 (bП 2 b) .
(13.23)
В формулах (13.20)–(13.23) размеры паза b1, b2, hП2, bП2, hS2, hК,
длина ротора l2, ширина стержня b приведены в метрах. Для всыпных обмоток из провода круглого сечения принимают значения коэффициентов теплопроводности λЭКВ = 0,16 Вт/(м·°С), λЭКВ / по графику рис. 13.2; для стержневых обмоток в формуле (13.20) принимают (b1 + b2) / (16 λЭКВ /) = 0.
Превышение температуры наружной поверхности лобовых частей обмотки ротора над температурой воздуха внутри двигателя,°С,
ПЛ 2 pЭЛ 2 (2 D2 lВЫЛ 2 2 ) ,
(13.24)
здесь рЭЛ2 – электрические потери в лобовых частях обмотки ротора, Вт,
pЭЛ 2 2 l Л 2 k pЭ 2 lW 2 ,
(13.25)
где рЭ2 – электрические потери в обмотке ротора, Вт, из табл. 11.1
при номинальном скольжении sН ; lЛ2 – длина лобовой части, м;
lW2 – средняя длина витка, м; lВЫЛ2 – длина вылета лобовой части обмотки ротора, м; обозначения и размерность других величин соответствуют принятым в формулах (13.18), (13.19).
Перепад температуры в изоляции лобовых частей обмотки ротора, °С,
bИЗЛ 2
pЭЛ 2
hП 2
ИЛ 2
(13.26)
,
2 z2 П Л 2 l Л 2 ЭКВ 12 ЭКВ /
здесь все размеры приведены в метрах; ПЛ2 – периметр поперечного
сечения условной поверхности охлаждения лобовой части катушки
обмотки ротора, м, приближенно принимают ПЛ2 ≈ ПП2; lЛ2 – длина
225
лобовой части катушки, м; bИЗЛ2 – односторонняя толщина изоляции
лобовой части, м, значение bИЗЛ2 выбирают по табл. 4.6 или 4.15;
при отсутствии изоляции лобовых частей bИЗЛ2 = 0.
В формуле (13.26) принимают значения коэффициентов теплопроводности λЭКВ / по графикам рис. 13.2, λЭКВ = 0,16 Вт/(м·°С). Для
стержневых обмоток принимают hП2 / (12 λЭКВ /) = 0.
α2, Вт/(м2·°С)
α2, Вт/(м2·°С)
120
140
2p = 4
2p = 6
100
80
0,08 0,12 0,16 0,20 0,24 DА, м
a)
100
2p = 10
2p = 8
2p = 6
100
2p = 8
60
0,26 0,30 0,34 0,38 0,42 DА, м
г)
α2, Вт/(м2·°С)
α2, Вт/(м2·°С)
140
2p = 4
2p = 4
140
2p = 4
100
2p = 8
2p = 6
2p = 6
60
0,26 0,30 0,34 0,38 0,42 DА, м
б)
2p = 10; 12
60
0,5 0,54 0,58 0,62 0,66 DА, м
д)
α2, Вт/(м2·°С)
Рис. 13.6. Средние значения коэффициента теплоотдачи α2 с поверх600
ности фазных роторов асинхронных
2p = 6; 8
двигателей на напряжение до 660 В
400
2p = 10; 12
с исполненями по степени защиты:
200
IP44, IP54 при высотах оси враще0,5 0,54 0,58 0,62 0,66 DА, м ния h ≤ 132 мм (а), h = 160–250 мм
в)
(б), h = 280–355 мм для продуваемых роторов с аксиальными каналами в сердечнике (в);
IP23 при высотах оси вращения h = 160–250 мм (г), h = 280–355 мм (д).
2p = 4
Среднее превышение температуры обмотки ротора над температурой воздуха внутри двигателя, °С,
2 / [2l2 (ПР ИП 2 ) 2l Л 2 (ПЛ 2 ИЛ 2 )] lW 2 . (13.27)
226
Среднее превышение температуры обмотки ротора над температурой окружающей среды, °С,
2 2 / B .
(13.28)
Соотношение превышений температуры, найденного по формуле (13.28) Δ2 и предельно допустимого ΔДОП, должно быть таким
же, как и у обмотки статора.
14. ВЕНТИЛЯЦИОННЫЙ РАСЧЕТ ДВИГАТЕЛЯ
Приближенный расчет вентиляции двигателя заключается в определении минимального расхода воздуха QB, необходимого для охлаждения машины, и расхода воздуха QВЕН, обеспечиваемого нагнетательными элементами системы вентиляции. Сравнение расходов
воздуха QB и QВЕН позволяет судить об эффективности охлаждения
двигателя. Условие нормального охлаждения двигателя QВЕН > QB.
Расход воздуха, необходимый для охлаждения двигателя с исполнением по степени защиты IP23, м3/с,
QB Σ pB / (1100 B / ) ,
(14.1)
где ΣрВ / – отводимые внутренним воздухом потери мощности по
формуле (13.12), Вт; ΔВ / – превышение температуры выходящего из
двигателя (нагретого) воздуха над температурой входящего (холодного), °С, приближенно ΔВ / = 2ΔВ , где ΔВ – по (13.11).
Расход воздуха, обеспечиваемый нагнетательными элементами,
3
м /с,
(14.2)
QBEH 0,01 m n (nК bК 0,1) DA2 ,
где m – коэффициент, учитывающий суммарное действие всех нагнетательных элементов, для машин с числом полюсов 2р = 2 принимают m = 2,6; с большим числом полюсов m = 3,15; n – частота вращения ротора двигателя, об/мин; nК, bК – число и ширина, м, радиальных
вентиляционных каналов, при их отсутствии nКbК = 0; DA – внешний
диаметр статора, м.
Полученное значение QВЕН должно быть не меньше QB, рассчитанного по формуле (14.1).
Расход воздуха, необходимый для охлаждения двигателя с исполнением по степени защиты IP44 или IP54, м3/с,
227
QB k MT Σ pB / (1100 B ) ,
(14.3)
здесь kMT – коэффициент, учитывающий изменение условий теплоотдачи с поверхности корпуса вследствие подогрева и рассеяния потока наружного охлаждающего воздуха по мере удаления от кожуха вентилятора,
(14.4)
k МТ 0,1 m n DA ,
где m – коэффициент, определяемый по табл. 14.1; n – частота вращения ротора двигателя, об/мин; DA – внешний диаметр статора, м;
ΣрВ / – отводимые внутренним воздухом потери мощности по формуле (13.15), Вт; ΔВ – превышение температуры корпуса условно принимают равным определяемому по формуле (13.11) превышению
температуры внутреннего воздуха, °С.
Таблица 14.1
Значения коэффициента m в формуле (14.4)
h, мм
≤ 132
160 – 355
Значения m
2р = 2
2,6
3,3
2р ≥ 4
1,8
2,5
Расход воздуха, обеспечиваемый наружным вентилятором, м3/с:
QBEH 0,006 n DA3 ,
(14.5)
где n – частота вращения ротора двигателя, об/мин; DA – внешний
диаметр статора, м.
Рассчитанное по (14.4) значение QBEH не должно быть меньше
найденного по формуле (14.3) значения QB.
228
ПРИЛОЖЕНИЕ 1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
КРАСНОЯРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
КАФЕДРА ЭПП
КУРСОВОЙ ПРОЕКТ
АСИНХРОННЫЙ
ДВИГАТЕЛЬ
………………
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Руководитель проекта
……...
…………………..
Разработал студент гр. ……… …………………..
КРАСНОЯРСК
229
ПРИЛОЖЕНИЕ 2
ЗАДАНИЕ №
НА КУРСОВОЙ ПРОЕКТ АСИНХРОННОГО ДВИГАТЕЛЯ
студенту гр. ……….
…………………………………………
Выполнить расчет и конструктивную разработку трехфазного
асинхронного двигателя с …………………... ротором со следующими техническими данными:
1. Номинальная мощность ……………………………… ……... кВт
2. Номинальное фазное напряжение ………………………….. В
3. Номинальная частота напряжения сети …………………… Гц
4. Номинальный КПД …………………………………………… %
5. Номинальный коэффициент мощности ……………………. о.е.
6. Число полюсов машины …………………………….………..
7. Высота оси вращения ………………………………………… мм
8. Установочный размер по длине станины …………………..
9. Конструктивное исполнение по способу монтажа ………...
10. Исполнение по способу защиты от воздействия окружающей среды ……………………………………………………….
11. Исполнение по способу охлаждения ……………….………..
12. Климатическое исполнение и категория размещения …….
13. Класс нагревостойкости изоляции …………………………...
Задание на курсовой проект выдано ”…. “ ……………… 20… г.
Руководитель проекта ………………………………………………
Изм Лист № докум. Подп. Дата
Разраб.
Проверил
АСИНХРОННЫЙ ДВИГАТЕЛЬ
…………………………………
Н.контр.
Пояснительная записка
Утверд.
Лит.
Лист Листов
230
ПРИЛОЖЕНИЕ 3
Задания на проект асинхронного двигателя с короткозамкнутым ротором
Обозначения: Р2Н – номинальная мощность; Н – номинальный КПД;
Cos Н – номинальный коэффициент мощности; 2р – число полюсов
Серия 4А Серия АИР №
Серия 4А Серия АИР
№
за- Р2Н ,
за- Р2Н ,
,
Cos
,
,
Cos
,
Н
Н
Н
Н да- кВт Н , Cos Н , Н , Cos Н ,
да- кВт
%
о.е.
%
о.е. ния
%
о.е.
%
о.е.
ния
Степени защиты IP44, IP54
2р = 2 ( n 1= 3000 об/мин)
00 2,2 83,0
01 3,0 84,5
02 4,0 86,5
03 5,5 87,5
04 7,5 87,5
05 11,0 88,0
06 15,0 88,0
07 18,5 88,5
08 22,0 88,5
09 30,0 90,5
10 37,0 90,0
11 45,0 91,0
12 55,0 91,0
13 75,0 91,0
14 90,0 92,0
15 110,0 91,0
16 132,0 91,5
17 160,0 92,0
18 200,0 92,5
19 250,0 92,5
20 315,0 93,0
0,87
0,88
0,89
0,91
0,88
0,90
0,91
0,92
0,91
0,90
0,89
0,90
0,92
0,89
0,90
0,89
0,89
0,90
0,90
0,90
0,91
83,0
84,5
87,0
88,0
87,5
88,0
90,0
90,5
90,5
91,5
91,5
92,0
92,5
93,0
93,0
92,0
92,0
92,5
92,5
93,0
93,0
0,87
0,88
0,88
0,89
0,88
0,90
0,89
0,90
0,89
0,90
0,87
0,88
0,91
0,90
0,92
0,88
0,88
0,89
0,89
0,90
0,91
2р = 4 ( n 1= 1500 об/мин)
21
22
23
24
2,2
3,0
4,0
5,5
80,0
82,0
84,0
85,5
0,83
0,83
0,84
0,85
81,0
82,0
85,0
85,5
0,83
0,83
0,84
0,86
25 7,5 87,5
26 11,0 87,5
27 15,0 88,5
28 18,5 89,5
29 22,0 90,0
30 30,0 91,0
31 37,0 91,0
32 45,0 92,0
33 55,0 92,5
34 75,0 93,0
35 90,0 93,0
36 110,0 92,5
37 132,0 93,0
38 160,0 93,5
39 200,0 94,0
40 250,0 94,5
41 315,0 94,5
0,86
0,87
0,88
0,88
0,90
0,89
0,90
0,90
0,90
0,90
0,91
0,90
0,90
0,91
0,92
0,92
0,92
87,5
87,5
90,0
90,5
90,5
92,0
92,5
92,5
93,0
94,0
94,0
93,5
94,0
93,5
94,0
94,5
94,5
0,86
0,87
0,89
0,89
0,87
0,87
0,89
0,89
0,89
0,88
0,89
0,91
0,93
0,91
0,92
0,92
0,92
2р = 6 ( n 1= 1000 об/мин)
42
43
44
45
46
47
48
49
50
51
52
53
2,2 81,0
3,0 81,0
4,0 82,0
5,5 85,0
7,5 85,5
11,0 86,0
15,0 87,5
18,5 88,0
22,0 90,0
30,0 90,5
37,0 91,0
45,0 91,5
0,73
0,76
0,81
0,80
0,81
0,86
0,87
0,87
0,90
0,90
0,89
0,89
81,0
81,0
82,0
85,0
85,5
88,0
88,0
89,5
90,0
90,0
91,0
92,5
0,74
0,76
0,81
0,80
0,81
0,83
0,85
0,85
0,83
0,85
0,85
0,85
231
Продолжение прил. 3
Серия 4А Серия АИР №
Серия 4А Серия АИР
№
за- Р2Н ,
за- Р2Н ,
да- кВт Н , Cos Н , Н , Cos Н , да- кВт Н , Cos Н , Н , Cos Н ,
%
о.е.
%
о.е. ния
%
о.е.
%
о.е.
ния
54 55,0 91,5
55 75,0 92,0
56 90,0 92,5
57 110,0 93,0
58 132,0 93,5
59 160,0 93,5
60 200,0 94,0
0,89
0,89
0,89
0,90
0,90
0,90
0,90
92,5
92,5
93,0
93,0
93,5
94,0
94,5
0,86
0,90
0,90
0,92
0,90
0,90
0,90
2р = 8 ( n 1= 750 об/мин)
61 2,2 76,5
62 3,0 79,5
63 4,0 83,0
64 5,5 83,0
65 7,5 86,0
66 11,0 87,0
67 15,0 87,0
68 18,5 88,5
69 22,0 88,5
70 30,0 90,5
71 37,0 90,0
72 45,0 91,0
73 55,0 92,0
74 75,0 92,5
75 90,0 93,0
76 110,0 93,0
77 132,0 93,5
78 160,0 93,5
0,71
0,74
0,70
0,74
0,75
0,75
0,82
0,84
0,84
0,81
0,83
0,84
0,84
0,85
0,85
0,85
0,85
0,85
76,5
79,0
83,0
83,0
87,0
87,5
89,0
89,0
90,0
90,5
92,5
92,5
92,0
93,0
93,0
93,0
93,5
93,5
0,71
0,74
0,70
0,74
0,75
0,75
0,82
0,81
0,81
0,81
0,78
0,79
0,86
0,87
0,85
0,86
0,85
0,85
2р = 10 ( n 1= 600 об/мин)
79
80
81
82
83 55,0 92,0
84 75,0 92,0
85 90,0 92,5
86 110,0 93,5
0,79
0,80
0,83
0,83
92,0
92,0
92,5
93,0
0,79
0,80
0,83
0,83
2р = 12 ( n 1= 500 об/мин)
87
88
89
90
45,0 90,5
55,0 91,0
75,0 91,5
90,0 92,0
0,75
0,75
0,76
0,76
90,5
91,0
91,5
92,0
0,75
0,75
0,76
0,76
Степень защиты IP23
2р = 2 ( n 1= 3000 об/мин)
91 22,0 88,0
92 30,0 90,0
93 37,0 91,0
94 45,0 91,0
95 55,0 91,0
96 75,0 92,0
97 90,0 92,0
98 110,0 93,0
99 132,0 93,0
100 160,0 94,0
101 200,0 94,5
102 250,0 94,5
103 315,0 94,5
104 400,0 95,0
0,88
0,91
0,91
0,91
0,90
0,90
0,88
0,86
0,88
0,90
0,90
0,91
0,92
0,92
–
–
–
–
92,5
92,5
93,0
94,0
93,5
94,5
95,0
94,5
95,0
95,0
–
–
–
–
0,88
0,89
0,87
0,87
0,87
0,89
0,89
0,90
0,92
0,92
2р = 4 ( n 1= 1500 об/мин)
22,0 –
–
86,5 0,80
30,0 88,0 0,81 88,0 0,81 105 18,5 88,5 0,87
37,0 91,0 0,78 91,0 0,78 106 22,0 90,0 0,88
45,0 91,5 0,78 91,5 0,78 107 30,0 90,0 0,84
–
–
–
–
–
–
232
Продолжение прил. 3
Серия 4А Серия АИР №
Серия 4А Серия АИР
№
за- Р2Н ,
за- Р2Н ,
да- кВт Н , Cos Н , Н , Cos Н , да- кВт Н , Cos Н , Н , Cos Н ,
%
о.е.
%
о.е. ния
%
о.е.
%
о.е.
ния
108 37,0 90,5
109 45,0 91,0
110 55,0 92,0
111 75,0 92,5
112 90,0 93,5
113 110,0 93,5
114 132,0 93,0
115 160,0 93,5
116 200,0 94,0
117 250,0 94,0
118 315,0 94,5
119 400,0 94,5
0,89
0,89
0,89
0,89
0,89
0,89
0,89
0,90
0,91
0,91
0,91
0,91
–
91,5
93,0
93,5
94,0
94,5
94,0
94,0
94,0
94,5
94,5
94,5
–
0,86
0,87
0,88
0,88
0,87
0,90
0,92
0,91
0,91
0,91
0,91
2р = 6 ( n 1= 1000 об/мин)
120 18,5 87,0
121 22,0 88,5
122 30,0 90,0
123 37,0 90,5
124 45,0 91,0
125 55,0 92,5
126 75,0 93,0
127 90,0 92,5
128 110,0 92,5
129 132,0 93,0
130 160,0 93,5
131 200,0 94,0
132 250,0 94,0
0,85
0,87
0,88
0,88
0,87
0,87
0,87
0,89
0,89
0,89
0,89
0,90
0,90
–
–
90,0
90,5
91,0
93,5
94,0
93,0
93,0
93,0
93,5
94,5
94,5
–
–
0,83
0,84
0,83
0,83
0,84
0,90
0,90
0,90
0,89
0,90
0,90
2р = 8 ( n 1= 750 об/мин)
133 15,0 86,0
134 18,5 87,5
135 22,0 89,0
136 30,0 89,5
137 37,0 90,0
138 45,0 91,0
139 55,0 92,0
140 75,0 92,0
141 90,0 92,5
142 110,0 93,0
143 132,0 93,0
144 160,0 93,5
145 200,0 94,0
0,80
0,80
0,84
0,82
0,81
0,81
0,81
0,85
0,86
0,86
0,86
0,86
0,86
–
–
89,5
90,5
90,0
92,0
93,0
92,0
92,5
93,0
93,0
93,5
94,0
–
–
0,83
0,80
0,81
0,78
0,79
0,86
0,86
0,87
0,86
0,86
0,86
2р = 10 ( n 1= 600 об/мин)
146 45,0 90,0
147 55,0 90,5
148 75,0 91,0
149 90,0 91,5
150 110,0 92,0
151 132,0 92,5
0,81
0,81
0,82
0,82
0,83
0,83
–
–
91,0
91,5
92,0
93,0
–
–
0,82
0,82
0,83
0,83
2р = 12 ( n 1= 500 об/мин)
152 55,0 90,5
153 75,0 91,0
154 90,0 91,5
155 110,0 92,0
0,78
0,78
0,77
0,77
90,5
91,0
91,5
92,0
0,78
0,78
0,77
0,77
233
ПРИЛОЖЕНИЕ 4
Задания на проект асинхронного двигателя с фазным ротором
Обозначения: Р2Н – номинальная мощность; Н – номинальный КПД;
Cos Н – номинальный коэффициент мощности; 2р – число полюсов
Серия 4А Серия АИР №
Серия 4А Серия АИР
№
Р
,
Р
,
за- 2Н
за- 2Н
,
Cos
,
,
Cos
,
Н
Н
Н
Н
да- кВт
да- кВт Н , Cos Н , Н , Cos Н ,
%
о.е.
%
о.е. ния
%
о.е.
%
о.е.
ния
Степени защиты IP44, IP54
2р = 4 ( n 1= 1500 об/мин)
00 2,2 –
01 3,0 –
02 4,0 –
03 5,5 –
04 7,5 –
05 11,0 86,5
06 14,0 88,5
07 15,0 –
08 18,5 89,0
09 22,0 90,0
10 30,0 90,5
11 37,0 90,0
12 45,0 91,0
13 55,0 90,5
14 75,0 91,5
15 90,0 –
16 110,0 –
17 132,0 –
18 160,0 –
19 200,0 –
20 250,0 –
–
–
–
–
–
0,86
0,87
–
0,88
0,87
0,87
0,87
0,88
0,90
0,86
–
–
–
–
–
–
75,0
77,0
80,0
82,0
85,0
86,0
–
88,0
89,0
89,5
89,0
90,5
91,0
91,5
92,0
92,5
92,5
93,0
93,0
93,5
93,5
0,81
0,81
0,82
0,83
0,84
0,85
–
0,86
0,88
0,87
0,86
0,86
0,87
0,89
0,86
0,88
0,90
0,91
0,90
0,91
0,92
2р = 6 ( n 1= 1000 об/мин)
21
22
23
24
2,2
3,0
4,0
5,5
–
–
–
–
–
–
–
–
70,0
72,0
78,0
81,0
0,71
0,73
0,77
0,76
25 7,5 82,5
26 10,0 84,5
27 11,0 –
28 13,0 85,5
29 15,0 –
30 18,5 88,0
31 22,0 88,0
32 30,0 89,0
33 37,0 89,0
34 45,0 90,5
35 55,0 –
36 75,0 –
37 90,0 –
38 110,0 –
39 132,0 –
40 160,0 –
41 200,0 –
0,77
0,76
–
0,80
–
0,81
0,80
0,85
0,84
0,87
–
–
–
–
–
–
–
85,0
–
86,0
–
87,5
88,0
88,5
89,0
89,5
90,0
90,5
91,0
91,5
92,0
92,5
93,0
93,5
0,76
–
0,81
–
0,81
0,81
0,78
0,84
0,83
0,87
0,86
0,88
0,89
0,90
0,88
0,89
0,90
2р = 8 ( n 1= 750 об/мин)
42
43
44
45
46
47
48
49
50
51
52
53
5,5 80,0
7,5 82,0
11,0 85,5
15,0 86,0
18,5 86,0
22,0 87,0
30,0 88,5
37,0 89,0
45,0 –
55,0 –
75,0 –
90,0 –
0,70
0,70
0,72
0,70
0,73
0,82
0,81
0,80
–
–
–
–
80,0
82,0
85,0
86,0
86,5
87,0
88,0
89,0
89,5
90,0
90,5
91,0
0,70
0,70
0,72
0,71
0,74
0,81
0,81
0,80
0,80
0,84
0,85
0,85
234
Продолжение прил. 4
Серия 4А Серия АИР №
Серия 4А Серия АИР
№
за- Р2Н ,
за- Р2Н ,
да- кВт Н , Cos Н , Н , Cos Н , да- кВт Н , Cos Н , Н , Cos Н ,
%
о.е.
%
о.е. ния
%
о.е.
%
о.е.
ния
54 110,0 –
55 132,0 –
56 160,0 –
–
–
–
91,5 0,85
92,0 0,84
92,5 0,84
Степень защиты IP23
2р = 4 ( n 1= 1500 об/мин)
0,88
0,87
0,88
0,88
0,89
0,89
90,5
91,0
91,5
92,0
92,5
93,0
0,88
0,88
0,88
0,88
0,89
0,89
2р = 8 ( n 1= 750 об/мин)
–
86 11,0 85,0 0,72
–
–
–
87 14,0 86,5 0,69
–
–
–
88 18,5 86,0 0,78 85 0,78
–
89 22,0 87,0 0,79 86 0,79
0,88 90 30,0 86,5 0,80 86,5 0,80
0,89 91 37,0 87,5 0,80 87,5 0,80
0,87 92 45,0 89,0 0,82 88,5 0,83
0,87 93 55,0 89,5 0,83 89,5 0,83
94 75,0 90,5 0,84 90,0 0,84
0,87
95 90,0 90,5 0,84 90,5 0,84
0,90 96 110,0 91,5 0,84 91,0 0,85
0,89 97 132,0 92,0 0,84 91,5 0,85
0,88 98 160,0 92,5 0,86 92,0 0,86
0,89 99 200,0 92,5 0,86 92,5 0,86
0,90
2р = 10 ( n 1= 600 об/мин)
0,90
–
–
0,90 100 45,0 89,0 0,78
101 55,0 89,5 0,79
–
–
2р = 6 ( n 1= 1000 об/мин)
102 75,0 90,0 0,80
–
–
103 90,0 90,5 0,81
–
–
73 13,0 83,5 0,81
–
–
104 110,0 90,5 0,81
–
–
74 17,0 85,0 0,82
–
–
105 132,0 91,0 0,81
–
–
74 22,0 88,0 0,81 87,5 0,81
2р = 12 ( n 1= 500 об/мин)
75 30,0 88,5 0,82 88,0 0,82
76 37,0 89,0 0,86 88,5 0,86 107 55,0 89,0 0,75
–
–
–
–
77 45,0 89,5 0,86 89,0 0,87 108 75,0 90,0 0,75
–
–
78 55,0 91,0 0,88 89,5 0,88 109 90,0 89,5 0,73
–
–
79 75,0 91,5 0,85 90,0 0,86 110 110,0 90,0 0,73
57 14,0 86,5
58 17,0 88,0
59 22,0 87,0
60 30,0 88,0
61 37,0 90,0
62 45,0 90,0
63 55,0 89,5
64 75,0 90,0
65 90,0 91,5
66 110,0 92,0
67 132,0 92,0
68 160,0 92,5
69 200,0 93,0
70 250,0 93,0
71 315,0 93,5
72 400,0 94,0
0,85
0,87
0,86
0,81
0,88
0,88
0,87
0,88
0,87
0,90
0,88
0,88
0,89
0,90
0,90
0,90
–
–
–
–
88,5
89,0
89,5
90,0
90,5
91,0
91,5
92,0
92,5
93,0
93,5
94,0
80 90,0 91,0
81 110,0 91,5
82 132,0 92,0
83 160,0 92,5
84 200,0 93,0
85 250,0 93,0
235
ЛИТЕРАТУРА
1. Проектирование электрических машин: Учеб. для вузов. – В 2-х
кн./ И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев;
Под ред. И.П. Копылова. – 2-е изд. – М.: Энергоатомиздат, 1993. –
Кн.1 – 464 с, Кн.2 – 384.
2. Унифицированная серия асинхронных двигателей Интерэлектро/
В.И. Радин, Й. Лондин, В.Д. Розенкнопф и др.; Под ред. В.И. Радина. – М.: Энергоатомиздат, 1990. – 416 с.
3. Справочник по электрическим машинам: В 2 т./ Под общей ред.
И.П. Копылова и Б.К. Клокова. – М.: Энергоатомиздат. Т.1. 1993. –
456 с.
4. Асинхронные двигатели серии 4А: Справочник/ А.Э. Кравчик,
М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. – М.: Энергоиздат,
1982. – 504 с.
5. Проектирование электрических машин: Учеб. пособие для вузов./
И.П. Копылов, Ф.А. Горяинов Б.К. Клоков; Под ред. И.П. Копылова. – 2-е изд. – М.: Энергия, 1980. – 496 с.
6. Асинхронные двигатели общего назначения/ Е.П. Бойко, Ю.В. Гаинцев, Ю.М. Ковалев и др.; под ред. В.М. Петрова и А.Э. Кравчика. – М.: Энергия, 1980. – 488 с.
7. Кокорев А.С. Справочник молодого обмотчика электрических
машин. – 5-е изд., – М.: Высш. школа, 1979. – 232 с.
8. Обмотки электрических машин/ В.И. Зимин, М.Я. Каплан, М.М.
Палей и др. – Изд. 7. – Л.: Энергия, 1975. – 488 с.
9. Гурин Я.И., Кузнецов Б.И. Проектирование серий электрических
машин. – М.: Энергия, 1978. – 480 с.
10. Сергеев П.С., Виноградов Н.В., Горяинов Ф.А. Проектирование
электрических машин. – М.: Энергия, 1969. – 632 с.
11. Копылов И.П. Электрические машины: Учеб. для вузов. – 2-е
изд., – М.: Высш. шк.; Логос; 2000. – 607 с.
12. Электрические машины: Асинхронные машины: Учеб. для вузов/
В.И. Радин, Д.Э. Брускин, А.Е. Зорохович. – М.: Высш. шк. 1988.
– 607 с.
13. Стандарт предприятия: Общие требования к оформлению текствых и графических студенческих работ. Текстовые материалы
и иллюстрации. СТП КГТУ 01-01. КГТУ. Красноярск, 2001. –
48 с.
14. Александров К.К., Кузьмина Е.Г. Электротехнические чертежи и
схемы. – М.: Энергоатомиздат, 1990. – 288 с.
236
15. Тепловые, гидравлические и аэродинамические расчеты в электрических машинах: Учеб для вузов по спец.“Электромеханика”/
Г.А. Сипайлов, Д.И. Санников, В.А. Жадан. – М.: Высш. шк., 1989.
– 239 с.
16. Охлаждение промышленных электрических машин/ А.И. Борисенко, О.Н. Костиков, А.И. Яковлев. – М.: Энергоатомиздат, 1983. –
296 с.
237
СОДЕРЖАНИЕ
Введение
3
1. Задание на проектирование. Состав проекта. Общие рекомендации
4
2. Серии асинхронных двигателей
6
3. Конструкция асинхронных двигателей
18
4. Элементы конструкции асинхронных двигателей
38
4.1. Станины
38
4.2. Магнитопроводы
46
4.3. Обмотки статоров
50
4.3.1. Устройство и изоляция обмоток статоров
50
4.3.2. Схемы обмоток статоров
58
4.3.2.1. Общие положения
58
4.3.2.2. Схемы однослойных трехфазных обмоток
статоров
59
4.3.2.3. Схемы двухслойных трехфазных обмоток
статоров
68
4.3.2.4. Схемы обмоток для механизированной
укладки
70
4.3.2.5. Рекомендации по выбору типа обмотки
статора
77
4.4. Обмотки роторов
78
4.4.1. Устройство и изоляция обмоток фазных роторов 78
4.4.2. Схемы обмоток фазных роторов
81
4.4.3. Обмотки короткозамкнутых роторов
86
4.5. Валы роторов
88
4.6. Подшипниковые щиты и подшипники
90
4.7. Вентиляционные узлы
97
4.8. Вводные устройства
100
4.9. Токосъемные устройства фазных роторов
104
5. Главные размеры двигателя
107
6. Расчет статора
115
6.1. Расчет обмотки статора
115
6.2. Расчет зубцовой зоны статора
123
7. Расчет ротора
135
7.1. Обмотка и зубцовая зона фазных роторов
135
7.2. Обмотка и зубцовая зона короткозамкнутых роторов
141
7.3. Сердечники роторов
150
238
8. Расчет магнитной цепи
151
8.1. Магнитная цепь асинхронной машины
151
8.2. Магнитное напряжение зазора
153
8.3. Магнитное напряжение зубцовой зоны статора
153
8.4. Магнитное напряжение зубцовой зоны ротора
160
8.5. Магнитное напряжение ярма (спинки) статора
167
8.6. Магнитное напряжение ярма (спинки) ротора
168
8.7. Намагничивающий ток двигателя
170
9. Параметры двигателя для номинального режима
171
9.1. Параметры (сопротивления) обмотки статора
171
9.2. Параметры (сопротивления) обмотки фазного ротора
177
9.3. Параметры обмотки короткозамкнутого ротора
181
10. Потери мощности и КПД
185
11. Расчет рабочих характеристик
194
12. Пусковые характеристики
198
12.1. Расчет параметров обмотки короткозамкнутого ротора
с учетом вытеснения тока
198
12.2. Расчет параметров обмоток двигателя с учетом насыщения зубцов статора и ротора
205
12.3. Расчет пусковых характеристик двигателя
210
13. Тепловой расчет двигателя
217
14. Вентиляционный расчет двигателя
226
Приложения
228
Литература
235