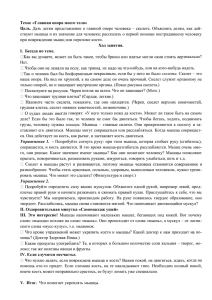
Лекция 1 1.5. Контрольные вопросы 1. Кто считается первым биомехаником и почему? a) Аристотель; 2. Кто из ученых древности был врачом римского императора Марка Аврелия? b) Клавдий Гален; 3. Книга какого ученого вышла в свет в 1680 году? ; c) Джованни Борелли 4. Кто разработал первый практической способ фотографии? a) Жак Луи Дагер 5. Какой ученый разработал пневмографию? маре 6. Назовите фамилию ученого, который изобрел фотографическое ружье и хронофотографию ; b) Этьен Жюль Маре; 7. Какие ученые опытным путем определили относительный вес Предмет биомеханики. История развития биомеханики 21 частей тела?; b) Вильгельм Брауне и Отто Фишер 8. Кто из российских ученых предложил разделять скелетные мышцы на сильные и ловкие? b) П.Ф. Лесгафт; 9. Назовите ученого, автора книги «О построении движений») Н.А. Бернштейн 10.Назовите ученого, получившего Нобелевскую премию «За открытия в области теплообразования в мышце») b) А. Хилл; 1. Что представляет собой ОДА человека с точки зрения биомеханики? Под опорно-двигательным аппаратом человека понимается система, состоящая из следующих элементов: Жесткий скелет – 206 костей (85 парных и 36 непарных), соединенных суставами и связками. Это пассивная часть аппарата движения. Скелетные мышцы (более 600). Это активная часть аппарата движения. Мышца выполняет несколько функций. Вопервых, мышца – это двигатель, то есть преобразователь химической энергии в мышечное сокращение; во-вторых – это движитель, то есть преобразователь мышечного сокращения в движение звена; в-третьих, мышца – это рецептор. Двигательные нейроны (мотонейроны). Мотонейроны расположены в сером веществе продолговатого и спинного мозга. По длинным отросткам (аксонам) этих клеток в соответствии с двигательной программой сигналы (команды) поступают из центральной нервной системы ЦНС к исполнительным элементам (эффекторам) – мышцам. Проприорецепторы. Проприорецепторы – нервные образования, расположенные в мышцах, сухожилиях, связках, суставных сумках. При сокращении или растяжении мышцы или сухожилия, а также изменении положения звена ОДА от чувствительных приборов (мышечных веретен, телец Паччини и Руффини, сухожильных органов Гольджи) в ЦНС поступает информация о текущей длине и скорости изменения длины мышцы, о значениях межзвенного угла и скорости его изменения, об уровне напряжений в сухожильносвязочном аппарате. Чувствительные нейроны. Чувствительные нейроны передают информацию, поступающую от рецепторов в центральные отделы нервной системы. Эта информация на различных уровнях ЦНС сличается с исходной программой движения, обеспечивая необходимую корректировку в управлении мышечной активностью 2. Сколько степеней свободы имеет твердое тело, закрепленное в двух точках? б) одну; 3. Существует ли в теле человека раз и навсегда замкнутая кинема- БИОМЕХАНИКА ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ 38 тическая цепь? а) да; 4. Возможны ли в замкнутой кинематической цепи изолированные движения в каждом суставе? б) нет. 5. Если кинематическая цепь «бедро – голень – стопа» замыкается через опору, то: а) управление движением этой цепи со стороны ЦНС становится проще или сложнее? б) возможностей движения в этой цепи становится больше или меньше? 6. Количество степеней свободы ОДА человека – это: в) число независимых линейных и угловых координат, которые определяют положение тела в пространстве. 7. В чѐм состоит задача превращения ОДА человека из «неполносвязного механизма» в «полносвязный механизм», и как она решается нервно-мышечной системой? Как указывал Н.А. Бернштейн (1935), основная задача управления движением состоит в преодолении избыточных степеней свободы движущегося звена (или системы звеньев тела). Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Такое устройство пассивного аппарата обусловливает неопределенность движений, множество возможных движений («неполносвязный механизм»). Управляющие воздействия мышц накладывают на сустав дополнительные связи и оставляют только одну степень свободы, только одну-единственную возможность движения (ту, которая требуется в каждом конкретном случае). Происходит превращение движущегося звена (или системы звеньев) из «неполносвязного механизма» (обладающего несколькими возможностями движения) в «полносвязный механизм», обеспечивающий движение в требуемом направлении по требуемой траектории. Любое целенаправленное движение человека возможно только при строго определенном ограничении подвижности в одних сочленениях и направленном изменении углов в других. Таким образом, техника движений реализуется раз и навсегда заданной цепью костных рычагов и единственно управляемым элементом ОДА- мышечной системой, превращающей неполносвязную кинематическую цепь в полносвязный механизм с направленным двигательным эффектом. 8. Почему с позиции механики мы можем рассматривать костные звенья, соединенные подвижно суставами, как рычаги первого и второго рода? Рычаг – твердое тело, способное вращаться вокруг неподвижной опоры (оси вращения), на которое действуют, по крайней мере, две силы с противоположными моментами вращения. Костные звенья, подвижно соединенные суставами, с позиции механики представляют собой рычаги. Сустав при этом является точкой опоры рычага. В механике различают двуплечие рычаги, или рычаги первого рода (действующие силы расположены по разные стороны от оси вращения), и одноплечие рычаги – рычаги второго рода (силы действуют по одну сторону от оси вращения). 9. Чем отличаются друг от друга рычаги первого и второго рода? Рычаги первого рода - действующие силы приложены по 2 стороны от точки опоры В рычаге второго рода действующие силы приложены по одну сторону от точки опоры. 10. При уравновешивании костного рычага второго рода мышца должна развивать силу: большую, чем противодействующая сила; 11. Если мышечный момент меньше момента силы тяжести костного звена, то мышца работает: в уступающем режиме. 12. Рычаги первого рода характеризуются: силами, приложенными по разные стороны от оси вращения; 13. Если мышца работает в преодолевающем режиме, то момент силы тяги мышцы больше, чем момент противодействующих сил. 14. Какой эффект оказывает нормальная (суставная) составляющая мышечной тяги на сегмент тела? б) вращение. Лекция 2 1. Что относится к биомеханическим свойствам мышц? а) сократимость; б) жесткость (упругость);; г) прочность; д) вязкость; 2. Как называется участок миофибриллы от одного б) саркомер; 3. Что происходит при последовательном расположении N саркомеров в миофибрилле? в N раз увеличивается скорость сокращения мышцы. 4. Что происходит при параллельном расположении N саркомеров (что соответствует увеличению числа миофибрилл)? а) в N раз увеличивается сила тяги мышцы; 5. Как изменяется жесткость мышцы при ее растяжении? увеличивается; 6. Как можно графически исследовать жесткость мышцы при ее растягивании? Пример. Имеются три пружины с различной жесткостью. При растягивании пружин с силой 20Н первая удлинилась на 0,05 м, вторая – на 0,1 м, третья – на 0,2 м. Определить коэффициенты жесткости пружин. Зависимость сил упругости от удлинения пружин представлена на рис. 3.12. Рис. 3.12. Зависимости сил упругости от удлинения пружин Биомеханика скелетных мышц 22 Решение. Коэффициент жесткости первой пружины равен: Н м L F k упр 400 / 0,05 20 1 Коэффициент жесткости второй пружины равен: Н м L F k упр 200 / 0,1 20 2 Коэффициент жесткости третьей пружины равен: Н м L F k упр 100 / 0,2 20 3 То есть, первая пружина – самая жесткая, а третья пружина обладает наименьшей жесткостью. 7. Для какой мышцы при растягивании на единицу длины требуется больше энергии? б) более жесткой. 8. В каком случае сила тяги, развиваемая мышцей, будет больше: а) нервный импульс активирует предварительно растянутую мышцу; 9. Как изменяется количество упругой энергии, накопленное мышцей, с увеличением промежутка времени между уступающим и преодолевающим режимами работы мышцы? а) увеличивается 10. В каком случае мышцы накапливают энергию упругой деформации? а) при растяжении 11. Когда вязкость мышцы больше? а) при слабом сокращении мышцы; 12. С учетом каких биомеханических свойств мышцы составлена ее трехкомпонентная модель? а) сократимости; б) жесткости (упругости) 13. Из какого исходного положения труднее выполнять «крест» на кольцах (объяснить почему)? а) из положения «вис» на кольцах; если гимнаст из исходного положения «упор» на кольцах опускается в положение «крест», то его мышцы для удержания положения «крест» смогут развить усилие и (статическому режиму работы предшествовал уступающий). Если же гимнаст выполняет «крест» из положения «вис» на кольцах, то статическому режиму работы мышц будет предшествовать преодолевающий, и мышцы гимнаста для удержания положения «крест» смогут проявить усилие только ин, то есть меньше, чем в предыдущем случае. 14. Почему мы подтягиваемся на перекладине медленно, а опускаемся вниз быстро? Сила тяжести 15. Зависит ли значение плеча силы тяги мышцы от межзвенного суставного угла? а) да; 16. Зависит ли значение силы тяги мышцы от межзвенного суставного угла? б) да 17. Какие биомеханические факторы влияют на формирование мышечного момента? а) длина мышцы; режим работы мышцы. Лекция 3 1. Какие силы являются внешними по отношению к ОДА человека? ; б) сила реакции опоры; ; г) сила трения; з) сила сопротивления среды 2. Какая сила не приложена к телу человека в полетной фазе бега или прыжков? б) вес тела. 3. Какие факторы определяют величину силы инерции ускоряемых спортсменом снарядов (например, легкоатлетического ядра или баскетбольного мяча), т. е. степень перегрузки ОДА спортсмена в точке контакта? а) масса снаряда; в) ускорение ЦМ снаряда; 4. Что покажет стрелка напольных весов, если спортсмен весом Р=700Н: а) стоит неподвижно на весах; б) приседает с ускорением, направленным вниз и равным а=5м/с2 ; в) встает из приседа с ускорением, направленным вверх и равным а=5м/с2 ? 5. С каким ускорением должен приседать спортсмен, чтобы стрелка весов показала ноль (т. е. спортсмен не будет оказывать давление на опору)? 6. В каком случае при выполнении прыжка вверх с места спортсмен выпрыгнет выше (объяснить почему)? б) с махом руками.