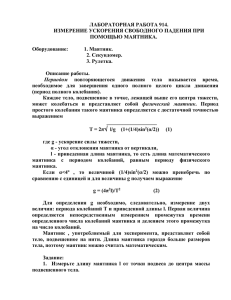
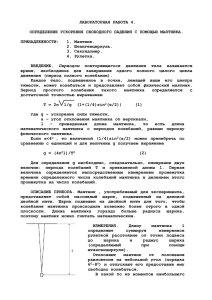
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное Учреждение высшего образования ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР) Кафедра физики ОТЧЕТ Лабораторная работа по курсу общей физики КИНЕМАТИКА РАВНОУСКОРЕННОГО ВРАЩЕНИЯ Преподаватель Студенты гр.243П _________Быков В.И. ________Абакумов Н.М. _________Никоненко А.В. ________Латушкин А.С « ________Латушкин П.С. »_____________2024г. « 2024 »_____________2024г. 2 ВВЕДЕНИЕ Целью данной работы является необходимость подтвердить неизменность углового ускорения вращающегося тела при действии постоянного момента сил и определить кинематические характеристики (угловые и линейные) вращающегося тела в целом и его отдельных частей. 1 ОПИСАНИЕ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ И МЕТОДИКА ИЗМЕРЕНИЙ Экспериментальная установка представляет собой крестообразный маятник (маятник Обербека) смонтированный на основании, содержащем электронный счётчик времени (таймер) заданного числа оборотов. Передняя панель установки содержит рукоятку выбора числа оборотов, кнопку «Сброс» и шкалу таймера. Схема экспериментальной установки представлена на рисунке 1.1. Схема передней панели установки представлена на рисунке 1.2. Рисунок 1.1 – Схема экспериментальной установки. 3 Рисунок 1.2 – Передняя панель установки. Методика эксперимента заключается в следующем: выставляется количество оборотов, сбрасывается время на таймере, маятник Обербека приводится в движение посредством опускания груза. Показания снимаются и записываются для дальнейшего анализа. 2 ОСНОВНЫЕ РАСЧЕТНЫЕ ФОРМУЛЫ Случайная погрешность величины <t> рассчитывается по формуле: ∑𝐾 (𝑡 −<𝑡>)2 𝑖 𝜎(< 𝑡 >) = √ 𝑖=1𝐾(𝐾−1) , (2.1) где K – число измерений в неизменных условиях. Выражение для расчета абсолютной погрешности косвенного измерения < 𝑡 >2 : 𝜎(< 𝑡 >2 ) = 2 ∗< 𝑡 >∗ 𝜎 < 𝑡 >, (2.2) где <t> - среднее время; σ<t> - случайная погрешность величины <t>. Выражение для расчета доверительных интервалов : 𝛥𝑥 = 𝑡𝑎∗𝑛 ∗ 𝜎(< 𝑡 >)^2, (2.3) где 𝑡𝑎∗𝑛 - Коэффициент Стьюдента равный 2.8. Выражение для расчета углового ускорения: 𝛥𝜑 𝜀 = 𝛥(𝑡)2 , (2.4) 4 Где Δφ – разность угловых поворотов; Δ(t)^2 – разность квадрата времени; 3 РЕЗУЛЬТАТЫ РАБОТЫ И ИХ АНАЛИЗ Результаты измерений представлены в таблице 3.1. Таблица 3.1 – Результаты измерений. 1 2 3 4 5 Угол, рад. 2П 4П 6П 8П 10П 1 2,08 3.00 3.73 4.34 4.88 2 2,10 3,04 3,76 4,38 4,92 3 2,04 2,98 3,70 4,32 4,87 4 2,05 2,98 3,71 4,32 4,87 5 2,06 3,00 3,71 4,33 4,87 2,07 3,00 3,72 4,34 4,88 Номер измерения Число оборотов Среднее время <t>, с <t>^2, c^2 4,27 9,00 13,85 18,82 23,83 Используя данные из таблицы 3.1 построим график экспериментальной зависимости <t> от числа оборотов N. И с целью точного установления характера зависимости угла поворота от времени построим график φ от < 𝑡 >2 . 5 График зависимости <t> от N изображен на рисунке 3.1. <t> от N 6,00 5,00 <t> ,с 4,00 3,00 2,00 1,00 0,00 0 1 2 3 4 5 6 N График зависимости φ от < 𝑡 >2 изображен на рисунке 3.2. φ от <𝑡>^2 30,00 25,00 <𝑡>^2 20,00 15,00 10,00 5,00 0,00 0 5 10 15 20 φ 25 30 35 6 Рассчитаем абсолютные погрешности измерения величин < 𝑡 >2, для чего сначала рассчитаем величины (𝑡𝑖 −< 𝑡 >) и (𝑡𝑖 −< 𝑡 >)2, занесем результаты в таблицу 3.2. Таблица 3.2 1 2 3 4 5 N i 𝑡𝑖 𝑡𝑖 - (𝑡𝑖 - <t> <t>)^2 𝑡𝑖 𝑡𝑖 - (𝑡𝑖 - <t> <t>)^2 𝑡𝑖 𝑡𝑖 - (𝑡𝑖 - <t> <t>)^2 𝑡𝑖 𝑡𝑖 - (𝑡𝑖 - <t> <t>)^2 𝑡𝑖 - (𝑡𝑖 - <t> <t>)^2 𝑡𝑖 1 2,08 0,01 0,00020 3.00 0,00 0 3.73 0.17 0.03 4.34 0,01 0,00006 4.88 0,00 0,00000 2 2,10 0,03 0,00116 3,04 0,04 0,0016 3,76 0.21 0.05 4,38 0,04 0,00144 4,92 0,04 0,00144 3 2,04 -0,03 0,00068 2,98 -0,02 0,0004 3,70 0.10 0.01 4,32 -0,02 0,00048 4,87 -0,01 0,00014 4 2,05 -0,02 0,00026 2,98 -0,02 0,0004 3,71 0.12 0.01 4,32 -0,01 0,00014 4,87 -0,01 0,00014 5 2,06 -0,01 0,00004 3,00 0,00 0 3,71 0.28 0.08 4,33 -0,01 0,00014 4,87 -0,01 0,00014 ∑(𝑡𝑖 −< 𝑡 >)2 ∑(𝑡𝑖 −< 𝑡 >)2 ∑(𝑡𝑖 −< 𝑡 >)2 ∑(𝑡𝑖 −< 𝑡 >)2 ∑(𝑡𝑖 −< 𝑡 >)2 = 0,00232 = 0,0024 = 0.18 = 0,00228 = 0,00188 σ <t1> = 0.01 σ <t2> = 0.01 σ <t3> = 0.01 σ <t4> = 0.011 σ <t5> = 0.009 С помощью формулы (2.1) рассчитаем случайные погрешности измерения величин < 𝑡 > : σ(< 𝑡1 >) = 0.01 σ(< 𝑡2 >) = 0.01 σ(< 𝑡3 >) = 0.01 σ(< 𝑡4 >) = 0.011 σ(< 𝑡5 >) = 0.009 Для расчета погрешности косвенного измерения воспользуемся формулой (2.2): σ1(< 𝑡 2 >) = 2 ∗ 2.07 ∗ 0.01 = 0.37 σ2(< 𝑡 2 >) = 2 ∗ 3 ∗ 0.01 = 0.54 σ3(< 𝑡 2 >) = 2 ∗ 3.72 ∗ 0.01 = 0.69 σ4(< 𝑡 2 >) = 2 ∗ 4.34 ∗ 0.011 = 0.79 7 σ5(< 𝑡 2 >) = 2 ∗ 4.88 ∗ 0.009 = 0.89 Рассчитаем доверительные интервалы по формуле (2.3): 𝛥𝑥1 = 2.8 ∗ 0.37 = 1.04 𝛥𝑥2 = 2.8 ∗ 0.54 = 1.52 𝛥𝑥3 = 2.8 ∗ 0.69 = 1.92 𝛥𝑥4 = 2.8 ∗ 0.79 = 2.22 𝛥𝑥4 = 2.8 ∗ 0.89 = 2.48 Воспользуемся методом наименьших квадратов: a = 0.2 b = 0.17 y1 = a*x + b, при x=0 y1 = 0.17; y2 = a*x + b, при x =25 y2 = 5.17. Рассчитаем угловое ускорение крестовины маятника с помощью формулы (2.4): 𝜀= 𝜀 = 2∗ 𝛥𝜑 𝛥(𝑡)2 8П рад = 2.57 2 19.56 с 8 Заключение Результаты обработки измеренных величин свидетельствуют о том, что условия эксперимента обеспечили равноускоренное вращение маятника. К таким условиям следует отнести постоянство результирующего момента сил и постоянство момента инерции маятника. Экспериментальная зависимость теоретической: ε = 2.57 рад с2 угла поворотов маятника от времени соответствует