PEO_LK2
реклама

2.1. Характеристика и классификация
аналитических методов оптимизации
Современное состояние теории электромеханических преобразователей
энергии характеризуется наличием развитой системы математических
моделей и алгоритмов анализа различных физических процессов в ЭМУС.
Это открывает возможности для построения подхода к задачам поиска и
оптимизации проектных решений на математической основе, с сокращением
до минимума дорогостоящих и длительных процедур физического
моделирования.
Различают аналитические и поисковые методы оптимизации.
Аналитические или классические методы оптимизации связаны с
использованием возможностей и применением средств дифференциального
и вариационного исчислений для определения экстремума функции цеди.
Эти методы позволяют определить точки, удовлетворяющие лишь
необходимым признакам локальных экстремумов, для чего используются
частные производные функции цели по параметрам. Поэтому применение
классических методов возможно, только:
1) Если известно аналитическое выражение функции цели от
параметров;
2) если эта функция дважды дифференцируема по параметрам.
Как известно, в точке экстремума все частные производные функции
обращаются в нуль, т. е.
Q
0 , i=1, 2, . . . , n.
xi
(2.1)
В соответствии с этим для определения местоположения экстремума
Qx используют необходимые и достаточные условия экстремума. Эти
условия легко получить с помощью разложения Q x в ряд Тейлора в
окрестности точек x :
Q x
xi xi
i 1 xi
2
1 n n Qx
xi xi xk xk
2 i 1 k 1 xi xk
Q x Q x
n
.
(2.2)
Необходимое условие экстремума:
Q
Q x Q Q
0 .
grad Q x
,
,...,
x
x
x
x
1
2
n
(2.3)
Точки в пространстве параметров, для которых выполняется это
условие, называются стационарными.
Достаточным условием максимума является отрицательность суммы
членов со вторыми частными производными в окрестности точек , то
x
есть:
Δx T ΓΔx
0,
(2.4)
T T
где Δx x x – вектор-столбец; Δx (x x ) – вектор-строка;
2Q
x12
2
2Q
x1 x2
Q
x1 x2
ΓΔx
2Q
x22
2Q
x1 xn
2Q
x2 xn
2Q
x1 xn
2Q
x2 xn
(2.5)
2Q
xn2
– матрица Гессе или гессиан.
Матрицу x , удовлетворяющую условию (2.4) при любых x ,
называют отрицательно определённой, а если выполняется условие
T
x x 0 ,
(2.6)
то – положительно определённой.
Поэтому достаточные условия экстремума можно представить как
требование отрицательной определённости матрицы Гессе для точки
максимума Q x или положительной определённости – для минимума
Qx в экстремальной точке.
Ограниченное применение аналитических методов для решения
задач оптимального проектирования или для оптимизации технических
объектов и систем и, в частности, ЭМУС, обусловлено следующими
причинами:
1) Всё сказанное относится к определению точки безусловного
экстремума Q x . А это условие, как правило, и не выполняется при
оптимизации технических объектов, в частности ЭМУС
2) Отмеченные ранее неявновыраженность и частичная дискретность
Qx , наличие ограничений в виде равенств и неравенств вынуждают
применять различные методы исследования
внутренних и граничных точек в
области допустимых значений x D .
3) Условия (2.1) справедливы не только для точек экстремума, но и для
точек перегиба. Вся совокупность точек пространства параметров,
удовлетворяющих условиям (2.1), как отмечено ранее, носит название
стационарных точек. Поэтому при решении задач оптимизации
необходимо определить все стационарные точки, а затем уже выделить из
них точку глобального экстремума функции цели. Учитывая
неявновыраженность функции цели относительно параметров оптимизации,
характерную для математического описания ЭМУС, необходимо говорить,
как правило, лишь о численных методах решения уравнений (2.1).
4) Ещё более проблематичным представляется применение аналитических методов при отыскании условных экстремумов функции цели, что
характерно для решения задач оптимизации при наличии ограничений, т. е. в
реальных задачах проектирования ЭМУС. Ограничения, накладываемые на
область определения функции цели, приводят к возможному несовпадению
условных и локальных экстремумов, а поэтому уравнения (2.1) в данном
случае нельзя рассматривать в качестве необходимых условий для
определения точек экстремума.
5) Для определения экстремума Q в задачах с ограничениями
рекомендуется отдельно рассматривать множества точек внутри и на границе
области допустимых значений параметров S. Однако в настоящее время не
существует общих методов исследования граничных точек на экстремум. В
частности, для ЭМУС, как правило, не имеется и явных выражений для
ограничений, поэтому затруднительно даже само определение множества
граничных точек.
2.2. Характеристика и классификация
поисковых методов оптимизации
Наибольшее распространение в решении задач оптимизации ЭМУС
получили
численные
методы
нелинейного
математического
программирования – так называемые методы поиска или поисковые
методы. Последнее название точно отражает существо методов, состоящее в
организации движения точки, соответствующей варианту проекта
(изображающей точки), в пространстве параметров x1, x2, . . . , xn.
Такое движение точки соответствует, в частности, при проектировании
ЭМУС последовательному рассмотрению вариантов, например, синхронного
генератора с возбуждением от постоянных магнитов, отличающихся
отношением наружного диаметра к активной длине статора. Каждая точка –
один вариант генератора. В результате такого, специальным образом
организованного, движения от некоторой начальной точки достигается
приближение к точке, дающей экстремум функции цели, например,
максимум КПД генератора. Применение этих методов связано с
многократным вычислением значений функций цели и ограничений, что для
ЭМУС представляется достаточно объёмной вычислительной задачей.
Поэтому методы поиска получили повсеместное распространение, прежде
всего, благодаря возможности применения вычислительной техники.
Существует большое число методов поисковой оптимизации, различных
по способу организации движения изобретающей точки в пространстве
параметров и условиям окончания поиска. Вместе с тем существуют и общие
особенности поисковых методов, позволяющие рассматривать их в качестве
отдельной группы методов оптимизации. Прежде всего, методы поиска – это
численные методы, дающие только некоторое приближение к оптимуму
функции цели, т. е. решающие задачу с определенной степенью точности,
задаваемой конечной величиной шага по параметрам оптимизации. Далее,
все методы поиска характеризует одна и та же последовательность действий.
Логическая схема алгоритмов поиска следующая:
1) Вводятся исходные данные для расчёта объекта проектирования, в
частности, в случае ЭМУС, например, исходные данные для
электромагнитного поверочного расчёта синхронного генератора с
возбуждением от постоянных магнитов; из этих данных один или несколько
параметров изменяются при переходе от одного варианта объекта
проектирования к другому, например, при переходе от варианта генератора с
одним значением отношения наружного диаметра к активной длине статора,
к варианту генератора с другим значением этого отношения.
2) Формируется очередная изображающая точка в пространстве
параметров оптимизации, в частности, в случае ЭМУС, проводится,
например, электромагнитный поверочный расчёт очередного варианта
синхронного генератора с возбуждением от постоянных магнитов с
конкретным значением отношения наружного диаметра к активной длине
статора.
3) Осуществляется в результате обращения к цифровой модели объекта
проектирования и соответствующим алгоритмам анализа проверка
выполнения ограничений. Например, в результате обращения к цифровой
модели электромагнитных процессов в синхронном генераторе с
возбуждением от постоянных магнитов, реализующей на ЭВМ алгоритм
электромагнитного поверочного расчёта такого генератора, осуществляется
проверка размещения генератора в заданных ТЗ габаритах, проверка
максимально допустимого значения тока и др.
4) Если хотя бы одно из ограничений оказалось невыполненным, то
формируется следующая точка в пространстве параметров, что соответствует
выбору нового варианта проекта. В рассматриваемом примере это
соответствует выбору нового варианта синхронного генератора с
возбуждением от постоянных магнитов с другим значением отношения
наружного диаметра к активной длине статора. Затем действия по проверке
ограничений повторяются. Если все ограничения выполняются, это означает,
что найден один из допустимых вариантов проекта, в частности генератора.
5) Для этого варианта с помощью цифровой модели объекта проектирования и соответствующих алгоритмов анализа определяется в числе
других рабочих показателей значение функции цели. Например, с помощью
цифровой модели электромагнитных процессов в синхронном генераторе с
возбуждением от постоянных магнитов, реализующей на ЭВМ алгоритм
электромагнитного поверочного расчёта такого генератора, определяется в
числе других рабочих показателей генератора значение КПД варианта
генератора с конкретным значением отношения наружного диаметра к
активной длине статора.
6) Проверка условий окончания поиска. Она завершает очередной шаг
поиска, на котором было рассмотрено и сопоставлено с другими ещё одно
проектное решение, Например, был рассмотрен вариант синхронного
генератора с возбуждением от постоянных магнитов с конкретным
значением отношения наружного диаметра к активной длине статора и
сопоставлен с вариантами такого генератора с другими значениями
указанного отношения.
7) Вывод результатов, например, результатов электромагнитного
поверочного расчёта варианта синхронного генератора с возбуждением от
постоянных магнитов, имеющего максимальный КПД.
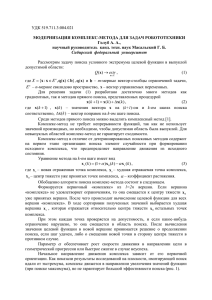
Логическая схема поиска, соответствующая приведённому описанию,
показана на рис.2.1.
Рис.2.1. Логическая схема алгоритмов поиска
Из описания и схемы видно, что процесс поиска характеризуется
циклическими действиями по определению как допустимых, так и
оптимальных проектных решений. При этом поиск проводится для
некоторой конечной совокупности точек в пространстве параметров, которая
задаётся заранее или определяется в процессе поиска в зависимости от
результатов, полученных на предыдущих шагах.
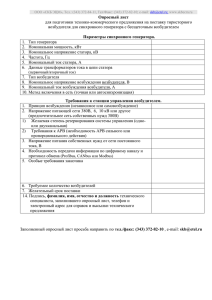
Одна из возможных классификаций методов поисковой оптимизации
представлена на рис.2.2. На верхнем уровне вся совокупность методов
подразделяется на две основные классификационные группы:
1) методы пассивного поиска;
2) методы направленного поиска.
Для пассивного поиска характерно:
1) равномерный
просмотр
совокупности
вариантов
проекта,
принадлежащих заранее заданной области в пространстве параметров
оптимизации;
2) при этом никак не учитывается информация о результатах,
полученных на предыдущих шагах поиска (отсюда и название этой группы
методов);
3) после того, как определены значения функции цели во всех заданных
точках, нужно найти вариант проекта, обладающий экстремальным
значением Q.
Существо методов направленного поиска состоит в следующем:
1) выбор движения из каждой точки в пространстве параметров таким
образом, чтобы при этом улучшались результаты, полученные на
предыдущих шагах;
2) поиск в данном случае продолжается до тех пор, пока ещё удаётся
улучшать значения функции цели;
3) для того чтобы в данном случае сделать поиск конечным (г. е.
ограничить число шагов поиска), необходимо задавать требования по точности определения положения экстремума Q в пространстве параметров;
4) В отличие от предыдущей группы методов, в направленном поиске
для формирования следующего варианта проекта используется информация,
полученная на предыдущих шагах.
2.3. Основные требования к методам оптимизации
Основные требования, которым должны отвечать методы оптимизации
с позиций их применимости в САПР.
1) Способность с помощью методов находить приближение к
глобальному экстремуму функции цели в условиях действия ограничений
или возможность определения точки глобального экстремума.
2) Приемлемость затрат на решение задач, простота соответствующих
алгоритмов и программ.
3) Минимальные требования к виду математических моделей ОП со
стороны метода оптимизации.
4) Достаточная точность определения точки экстремума в пространстве
параметров оптимизации. Поскольку лучшее значение функции цели Q
заранее неизвестно, то целью оптимизации является определение точки x ,
дающей неулучшаемое в некоторых условиях значение Q. Точность
определения x задаётся, как правило, значениями x.
5) Сохранение работоспособности метода в условиях действия
ограничений.
6) Минимальные затраты на поиск оптимального проектного решения.
Практически речь идёт о затратах машинного времени, т. к. подавляющее
большинство задач оптимизации решается с применением ЭВМ.
7) Минимальная чувствительность метода к размерности решаемой
задачи оптимизации, то есть к числу параметров оптимизации, принимаемых
во внимание.
8) Простота настройки метода на конкретные условия применения.
Метод даёт только общие соотношения. Настройка должна обеспечивать
работоспособность метода, повышать точность и уменьшать затраты
времени на решение задачи.
В курсе лекций рассматриваются только некоторые методы, являющиеся типичными представителями определенных групп методов
поисковой оптимизации и находящие применение для решения задач
оптимизации ЭМУС. Для более подробного ознакомления с другими методами можно обратиться, например к [1].
2.4. Характеристика этапов проектирования
электромеханических устройств и систем
Знакомство с алгоритмами и программами поверочного расчёта и
поисковой оптимизации ЭМУС целесообразно провести на примере
гироскопических электродвигателей (ГД).
ГД, как и большинство других ЭМУС, представляет собой объект
проектирования с известной структурой, но заранее неизвестной элементной
базой. Задачи проектирования ГД трудноформализуемые, так как они только
частично поддаются формализации. Проектные решения в данном случае
получаются при взаимодействии человека и ЭВМ. По программе на ЭВМ
проводится расчёт, человек задаёт входные данные, оценивает полученные
результаты и определяет действия, выполняемые ЭВМ.
Подход к решению задач оптимизации во-многом определяется
особенностями математических моделей объектов проектирования, а также
выражений, представляющих ограничения. В настоящем курсе лекций
рассматриваются поисковые методы оптимизации или методы поиска.
Различные методы поиска отличаются способами задания изображающих
точек в пространстве параметров и условиями окончания поиска.
Предварительно необходимо определить место поверочного расчёта в
процессе проектирования ЭМУС. Под проектированием понимают
разработку объекта по составленному техническому заданию (ТЗ). ТЗ
определяет назначение объекта, его основные технико-экономические
показатели. Проектирование большинства ЭМУС, в том числе ГД, – это
сложный трудоёмкий процесс, требующий учёта большого количества
факторов, от которых зависят технико-экономические показатели ЭМУС,
технологичность изготовления, эксплуатационные свойства и надёжность в
работе.
Можно выделить два условно обособленных этапа проектирования:
1) Этап проектного расчёта по разработке нового изделия. Он включает
в себя следующие подэтапы:
– анализ ТЗ;
– знакомство с требованиями стандартизации и унификации для
данного класса объектов;
– знакомство с материалами и имеющимися на них государственными
и отраслевыми стандартами (ГОСТ, ОСТ);
– изучение технологических процессов изготовления ЭМУС, их
отдельных элементов и компонентов, требований и ограничений;
– выбор конструкции, материалов;
– расчёт основных размеров и обмоточных данных.
2) Этап поверочного расчёта по обеспечению требований ТЗ и оценке
качества проектируемого объекта. Для получения оптимального варианта
разрабатываемого объекта на основе первого и второго этапов целесообразна
организация итеративного цикла с коррекцией решений, принимаемых на
первом этапе, после анализа результатов второго этапа.
Важный этап предварительного проектирования ЭМУС – установление
габаритных размеров ЭМУС. Для рассматриваемого ЭМУС – ГД – основная
область применения – приборные электромеханические системы. ГД
встраивается в прибор, и его габаритные размеры определяются размерами
отведённого под него цилиндрического пространства диаметром Dн и
длиной
Ls. Обеспечение требуемых характеристик ГД зависит от
рационального распределения объёма под статор и ротор. Dн определяет для
двигателей обращённого исполнения (статор размещается внутри ротора)
(ОИ) наружный диаметр ротора Dr=Dн, а при нормальном исполнении
(ротор внутри статора) (НИ) – наружный диаметр статора Ds=Dн. Размер Ls
включает полную длину магнитопровода статора с обмоткой. Иногда задают
некоторые другие размеры, ограничивающие размещение ГД, например,
внутренний диаметр Dв или диаметр Dл, ограничивающий при НИ сверху, а
при ОИ – снизу пространство для вылета лобовой части обмотки. Для
наиболее распространенных в приборных электромеханических системах ГД
Dн=1.210 см, Ls/Dн=0.550.75, Dв/Dн=0.20.3.
Программа поверочного расчёта служит основой для всех программ
оптимизации, так как она реализует на ЭВМ модель проектируемого объекта
– прецизионного гироскопического электродвигателя (ГД). Фактически, при
использовании любого метода оптимизации производятся многократные
обращения к программе поверочного расчёта для нахождения рабочих
показателей и характеристик ГД при определенных сочетаниях его
параметров. Программа поверочного расчёта базируется на обобщённой
модели асинхронного электродвигателя, учитывающей высшие гармоники
магнитного поля, несинусоидальность и несимметрию питании, и
реализована в виде исполняемого файла для операционной системы
Windows.
Исходными данными для поверочного расчёта являются параметры ГД,
которые можно сгруппировать следующим образом:
1) Геометрические параметры ГД.
2) Размерные соотношения в ГД.
3) Параметры электропитания и нагрузки на валу ГД.
4) Обмоточные данные статора и ротора.
5) Параметры материалов статора и ротора.
После завершения расчёта программа записывает в файл исходные
данные и результаты расчёта и выдаёт рабочие показатели ГД в табличной
форме и основные рабочие характеристики ГД в графической форме.
2.5. Аналоги объектов проектирования.
Основные и неосновные показатели
В курсе лекций необходимо рассмотреть алгоритм и программы поиска
аналогов проектируемых объектов в режиме диалога с применением базы
данных по известным проектно-конструкторским разработкам ГД.
Проектирование технических объектов, как правило, проводится с
применением опыта ранее выполненных разработок. Это существенно
облегчает действия проектировщика, позволяя использовать типовые узлы и
детали в новом изделии, и организацию производства новых объектов.
На начальных этапах проектирования определяются тип и
конструктивная схема объекта проектирования на основе некоторого
конечного множества альтернативных вариантов. Для поиска проектных
решений на этих этапах необходимо предварительно проранжировать
множество альтернативных вариантов в соответствии с различными
функциями цели, что предполагает использование опыта проектирования
подобных объектов.
При этом можно рассматривать задачи выбора типа и конструктивной
схемы объекта независимо друг от друга только в тех случаях, когда лучший
для данного задания тип объекта при всех конструктивных схемах
оказывается предпочтительнее любого другого сочетания типа объекта и его
конструкции. В общем случае следует предполагать взаимное влияние типа и
конструкции объекта, что приводит к мультипликативному возрастанию
количества принимаемых к рассмотрению альтернатив. Тогда предпочтение
должно быть отдано типу объекта, который хотя бы при одной
конструктивной схеме лучше другого при любых конструктивных схемах.
Однако обоснованность таких суждений часто может быть проверена только
при конкретизации объекта до уровня параметров.
В соответствии с базовым подходом к решению проблем поиска и
оптимизации проектных решений на начальных этапах проектирования
поиск проектных решений предполагает работу со специально
организованной
базой
данных
(БД),
в
которой
хранится
систематизированная информация о ранее выполненных проектноконструкторских разработках (ПКР) электромеханических устройств и
систем (ЭМУС) данного класса. Эта информация при поступлении ТЗ на
проектирование обрабатывается с помощью ЭВМ с целью выбора аналога
проектируемого ЭМУ.
Аналоги представляют собой лишь первые и часто достаточно грубые
приближения к оптимальному варианту проекта. Каждый аналог, по
существу, является только начальной точкой для поиска оптимального ЭМУ,
но, что важно, находящейся в области допустимых значений параметров по
технологическим ограничениям и имеющей рабочие показатели, с некоторой
степенью отвечающие требованиям ТЗ.
Следует отметить, что процесс поиска аналогов может давать хорошие
приближения к оптимальному варианту проекта при наличии в БД
информации о достаточно большом количестве разнообразных разработок.
Поэтому необходимо накапливать информацию о выполненных ПКР и
периодически пополнять ею БД. При отсутствии достаточной информации о
ранее выполненных разработках можно воспользоваться рекомендациями по
выбору аналогов, полученными в результате предварительно выполненных
расчётов. Эти рекомендации также могут храниться в БД.
Таким образом, исходной информацией для поиска аналогов являются
требования ТЗ на проектирование, которые, как правило, задаются в виде
нестрогих
односторонних
или
двухсторонних
неравенств,
регламентирующих уровень рабочих показателей объекта. Следует ожидать,
что среди известных ПКР не найдется таких, которые бы в полной мере
отвечали требованиям, предъявляемым к проектируемому ЭМУ. В то же
время не все эти требования в одинаковой степени важны. Поэтому при
поиске аналога требуется, прежде всего, определить варианты проекта,
приближено удовлетворяющие ограничениям по ресурсам (масса, габариты,
материалы, параметры источника питания и др.) и наиболее важным из
условий применения рабочим показателям объекта проектирования.
Таким образом, выполнение требований по ряду показателей, которые
называются основными, является обязательным уже на начальных этапах
проектирования. По другим, неосновным, показателям можно допустить
некоторое ослабление требований ТЗ. Деление показателей объекта на
основные и неосновные зависит от конкретных условий применения объекта.
2.6. Процедура поиска аналогов
Проведя эту предварительную работу, проектировщик может поручить
ЭВМ технические действия по сопоставлению требований ТЗ с данными
известных ПКР, находящимися в БД, и выбору аналогов. Процедура поиска
аналога состоит в следующем:
1) Выполняется анализ полученного ТЗ и вводятся уступки по ряду
показателей, уровни которых оговариваются в ТЗ.
2) Последовательно просматриваются данные объектов, записанные в
БД, и определяются соответствующие значения функций принадлежности.
3) Если в БД найдётся описание объекта, обладающего необходимым
уровнем функции принадлежности, то есть удовлетворяющего требованиям
ТЗ с учётом введенных уступок, то этот объект может быть принят в
качестве аналога и его данные запоминаются.
4) Для каждого найденного аналога вычисляется значение общей
функции
принадлежности
k( y )=min{a1(y1),a2(y2),...,am(ym)},
k=1,2,...,l, где l – количество найденных аналогов. Информация об аналогах,
имеющих 0,5k( y )1,0, представляется пользователю для принятия
окончательного решения.
5) В том случае, когда просмотр БД не выявил аналог, возможно
дальнейшее ослабление требований ТЗ и повторение процедуры поиска.
Таким образом, условием окончания поиска является определение
координат изображающей точки в пространстве параметров, для которой
выполняются все ограничения.
Представленный алгоритм поиска аналогов реализован в виде системы
программ, работающей в режиме диалога, управляемого ЭВМ с помощью
последовательности директив. После ввода требований ТЗ и соответствующих уступок управление передаётся собственно программе поиска аналога, которая просматривает описания множества объектов, хранящиеся в
БД. Если в результате работы этой программы определяется достаточное
число аналогов (оно выводится на дисплей), пользователь может
ознакомиться с данными полученных аналогов и задать номера объектов,
необходимых ему для дальнейшей работы. Имеется возможность получить
данные аналогов в различных формах и для различных применений.
Когда эти действия выполнены, проектировщик решает, какие именно
аналоги из выбранных ЭВМ принять к дальнейшему рассмотрению. В этом
случае, когда из множества ПКР не выбрано ни одного аналога, также
необходимо вмешательство проектировщика для того, чтобы пересмотреть
задаваемые ограничения или самостоятельно сформировать данные аналога.
Таким образом, налицо необходимость интерактивного, непосредственного
взаимодействия разработчика с ЭВМ в процессе решения задачи.
2.7. Преобразование аналогов. Получение проектных решений
Следующая задача состоит в преобразовании найденных аналогов таким
образом, чтобы получить проектные решения, то есть варианты проекта,
удовлетворяющие всем требованиям задания на проектирование. Такие
варианты называются прототипами или допустимыми проектными
решениями. Преобразование аналогов можно выполнять, используя
различные приёмы, например такие, как изменение формы деталей и узлов
объекта, замена материалов и размеров, деталей и узлов аналога другими и
пр.
Для преобразования аналогов бывает полезно разделить всю совокупность параметров на несколько групп, и в дальнейшем при поиске
прототипов изменять параметры поочередно, по группам. Это позволяет, вопервых, сократить размерность пространства поиска на каждом шаге
преобразования аналога и, во-вторых, получать прототипы за счёт изменения
только небольшого числа параметров. Так, например, при поиске прототипа
проектируемого ЭМУ можно на первом шаге изменить только материал
магнитопровода и обмоточные данные без изменения размеров штампов
статора, что в первом приближении не требует изменения конструкции. Если
внесенные в аналог изменения не приносят желаемых результатов, в
рассмотрение включают следующие группы параметров. Таким образом,
имеется возможность получать прототипы при минимальных изменениях
аналогов. После получения некоторого множества прототипов можно
переходить к решению задач параметрической оптимизации.
Если задача поиска аналогов на конечном множестве альтернативных
вариантов проекта может быть решена с помощью простого перебора всех
имеющихся в наличии вариантов проекта и выяснения степени их
пригодности в качестве аналога проектируемого объекта, то проблема
преобразования аналогов с целью получения прототипов имеет некоторые
особенности. В отличие от задач оптимизации здесь отсутствует функция цели в привычном виде, и необходимо определить хотя бы один вариант
проекта, попавший в область допустимых значений параметров S. Трудности
прямого использования для этих целей методов поисковой оптимизации
делают необходимой разработку специальных алгоритмов входа в
допустимую область. Рассмотрим более подробно один из возможных
алгоритмов.
1) Все действующие ограничения разделяются на технологические,
задающие, например, пределы изменения некоторых геометрических
размеров, и функциональные, определяющие требуемый уровень рабочих
показателей. Такое разделение позволяет использовать при нарушении
технологических ограничений модифицированный метод барьерной
функции.
2) При нарушении какого-либо ограничения производится возврат в
предыдущую точку пространства параметров, а затеи последовательное
приближение из неё к границе допустимой области параметров. Если при
этом не достигается выполнения всех ограничений, то следующий шаг
делается в направлении градиента функции невыполненного на предыдущем
шаге технологического ограничения.
3) Если все технологические ограничения выполнены, то поиск входа в
допустимую область осуществляется методом зигзагообразного движения
вдоль границы допустимой по уровню рабочих показателей области. При
этом, считая, что все ограничения приведены к виду
H j X 0 ,
(2.7)
рабочий шаг следует производить в направлении вектора суммы градиентов
функциональных ограничений, не выполненных в данной точке.
Предварительно необходимо произвести нормировку градиентов, например,
путём деления значения модуля градиента на значение соответствующей
функции ограничения в данной изображающей точке.
В условиях функционирования САПР опыт проектирования концентрируется в виде базы данных (БД), размещаемой на машинных носителях
информации, в качестве которых чаще всего применяются магнитные диски,
обладающие большой ёмкостью (до 10 Гбайт и более) и малым временем
доступа к необходимой информации (десятки микросекунд). В том случае,
когда САПР ориентирована на получение типовых проектных решений (а
именно это является задачей учебно-исследовательской САПР), в составе БД
целесообразно хранить следующие данные, полностью характеризующие
ранее спроектированные объекты:
1) рабочие показатели, по которым оценивается функциональная
пригодность объекта, и требования к которым указываются в ТЗ;
2) параметры объектов, которые требуются для их описания (в том
числе и в виде чертежей) и для проведения различных расчётов.
В ТЗ на проектирование гироскопических электродвигателей (ГД)
обычно оговариваются требования к следующим параметрам и рабочим
показателям ГД:
1) кинетический момент Н;
2) радиус сферы Rсф, в которую надо вписать проектируемый ГД;
3) масса;
4) время разгона до номинальной частоты вращения tр;
5) энергетические показатели в пусковом и номинальном режимах
работы, например, потребляемая мощность Р1п, Р1н и токи I1п, I1н и пр.
При этом не все требования ТЗ являются одинаково важными и поэтому
одни из показателей можно считать основными, другие – неосновными.
Назначение требований ТЗ на проектирование ГД, проводится с учётом
условий их работы в составе электромеханической системы (ЭМС). При этом
разработчик ТЗ руководствуется не физическими взаимосвязями показателей
ЭМУС, а требованиями к показателям, определяемыми объектом более
высокой степени иерархии, то есть ЭМС, что может приводить к
невозможности одновременного выполнения всех требований ТЗ.
Для расширения возможностей поиска аналогов на достаточно
ограниченном множестве известных объектов целесообразно вводить
уступки по ряду требований ТЗ к неосновным показателям. Как правило,
требования ТЗ формируются в форме односторонних неравенств вида
j y j j a j , j 1, 2, . . . , m,
где
(2.8)
1 при
αj
1 при
y j a j;
y j a j,
(2.9)
yj – значение j-го рабочего показателя объекта проектирования, aj –
ограничение на j-й показатель.
Введение уступок можно рассматривать как снятие чётких ограничений
на рабочие показатели объекта проектирования и замену их нечёткими
ограничениями. Для количественной оценки степени удовлетворения
объекта требованиям ТЗ применяются функции принадлежности его
показателей множеству ограничений ТЗ, определяемые соотношением:
α j a j y j b j b j при j y j j a j ;
a j y j
1
при j y j j a j .
(2.10)
Тем самым принимается, что при yj=ajbj, то есть когда значение
показателя находится на границе допустимой области, заданной уступкой bj,
функция принадлежности по данному показателю aj(yj)=0, а в случае
выполнения требований ТЗ, начиная с момента, когда yj=aj, aj(yj)=1.
Таким образом, изложенный выше подход к поиску проектных решений
основывается на привлечении результатов выполненных проектноконструкторских разработок и предполагает по возможности минимальное
их преобразование для получения прототипов объекта проектирования.
2.8. Характеристика оптимизации электромеханических
устройств и систем методами пассивного поиска
В курсе лекций изучаются и исследуются методы и алгоритмы
пассивного поиска оптимальных проектных решений: сканирования,
статистических испытаний, –поиска и рассматривается их применение
при параметрической оптимизации ГД.
Для ЭМУС, и в частности ГД, параметрами оптимизации могут быть
1) геометрические размеры и их соотношения;
2) обмоточные данные;
3) характеристики материалов;
4) параметры электропитания и нагрузки;
5) соотношения показателей и др. [2, 3].
При проектировании ЭМУС укрупнено выполняются следующие
действия:
1) часть исходных переменных задаётся из ТЗ, а часть – на основе
статистических данных;
2) из всего многообразия параметров ЭМУС выделяется по
возможности их минимальное количество, наиболее полно определяющее
конструкцию и процессы конкретного устройства или системы;
3) для выделенных параметров них задаются области допустимых
значений;
4) проводятся циклические проектные расчёты ЭМУС при вариации
исходных переменных.
В качестве параметров оптимизации ГД цилиндрической конструкции
обычно принимаются следующие параметры:
Kd – отношение наружного диаметра ГД (наружного диаметра статора
при нормальном исполнении или ротора – при обращённом исполнении) к
диаметру поверхности статора со стороны зазора;
n1 – относительная площадь пазов статора – отношение суммарной
площади пазов к площади пластины статора;
Kм – кратность максимального момента – отношение максимального
электромагнитного момента, развиваемого ГД, к номинальному моменту
нагрузки;
– размер воздушного зазора, см.
Выбор указанных параметров оптимизации продиктован практикой
проектирования ГД.
Параметр Kd задаёт распределение полного объёма ГД на статор и
ротор, n1 – распределение объёма статора на магнитопровод и обмотку.
Коэффициент Kм определяет время разгона ГД и, следовательно, время
готовности гироскопа.
Размер воздушного зазора – важнейший геометрический параметр ГД,
характеризующий процесс электромеханического преобразования энергии в
ГД.
Таким образом, любое сочетание двух, трёх или четырёх из указанных
параметров однозначно определяет вариант ГД при заданных габаритах.
Разнородность параметров оптимизации, различия в диапазонах их
изменения приводят к необходимости нормирования параметров
оптимизации. При этом реальная область поиска, определяемая диапазонами
xi min xi xi max , i 1, 2, . . . , n,
(2.11)
заменяется единичным п–мерным объёмом, а
нормированных параметров вычисляются по формуле:
xi
текущие
xi xi min
,
xi max xi min
значения
(2.12)
при этом 0 xi 1, i 1, 2, . . . , n.
Рабочими показателями ГД являются:
1) потребляемые токи и мощности в пусковом (I1п , P1п) и номинальном
(I1н , P1н) режимах;
2) электромагнитный момент (M);
3) КПД ();
4) время разгона (tp);
5) крутизна механической характеристики (dM/dS);
6) номинальное относительное скольжение (Sн) и др.
Наиболее часто критериями оптимальности назначаются н, tp, dM/dS.
Реально при оптимизации ГД приходится учитывать как ограничения на
его рабочие показатели, указанные в ТЗ на проектирование, так и
ограничения технологической выполнимости размеров ГД, например,
размеров штампа статора и ротора.
Наибольшее распространение для решения задач параметрической
оптимизации ЭМУС получили численные методы нелинейного
программирования или методы поиска, позволяющие определить
приближение к экстремуму функции цели с определённой степенью
точности. В курсе лекций рассматриваются методы пассивного поиска:
сканирования, статистических испытаний, –поиска, сущность которых
состоит в организации равномерного просмотра вариантов проекта в заданной области изменения параметров. При этом процесс поиска не зависит от
результатов, полученных в ходе поиска.
Для данной группы методов заранее определяется количество
вариантов, которые должны быть проанализированы для определения
экстремума функции цели с заданной степенью точности. Отсюда очевидны
основные преимущества этой группы методов:
1) независимость процесса и результатов поиска от наличия
ограничений и поведения функции цели;
2) возможность приближения к глобальному экстремуму в заданной
области изменения параметров.
Основной недостаток – значительные затраты на поиск, связанные с
необходимостью просмотра большого количества точек для получения
достоверной информации об экстремуме функции цели.
Каждая точка во всех методах поиска – это конкретный вариант
объекта проектирования, в частности при проектировании ЭМУС –
вариант, например, гироскопического электродвигателя системы
управления летательным аппаратом или генератора системы
электроснабжения, а координаты точки – конкретные значения
переменных параметров, в зависимости от изменения которых ведётся
поиск оптимального варианта объекта проектирования.
Необходимо более подробно рассмотреть алгоритмы этих методов.
2.9. Метод сканирования
Алгоритм данного метода организует просмотр всех узлов n-мерной
решётки в области изменения параметров оптимизации, которая
определяется условиями (2.11) и (2.12).
Здесь и далее каждый узел решётки – это конкретный вариант
объекта проектирования, в частности при проектировании ЭМУС –
вариант, например, гироскопического электродвигателя системы
управления летательным аппаратом или генератора системы
электроснабжения, а координаты узла – конкретные значения
переменных параметров, в зависимости от изменения которых ведётся
поиск оптимального варианта объекта проектирования.
В данном методе:
1) диапазоны изменения
параметров
разбиваются
на
некоторое
установленное расчётчиком количество отрезков Ni, как правило, с равномерным шагом xi;
2) во всех узлах решётки, кроме тех, в которых не выполняются
ограничения, определяются значения функция цели Q;
3) путём сравнения выбирается узел с лучшим значением Q; тем самым
определяется приближение к точке глобального экстремума с точностью,
характеризуемой относительным объёмом n-мерного параллелепипеда,
ограниченного отрезками xi:
n
n
Δxi
Δxi ;
Δ
x
x
imin i 1
i 1 imax
(2.13)
количество обращений к цифровой модели объекта для расчёта значений
функций ограничений, а в случае их выполнения – и значения функции цели,
определяется как произведение
n
N p N i 1,
i 1
(2.14)
где Ni – количество отрезков разбиения диапазона по i-му параметру.
Просмотр Np точек в пространстве параметров или всех узлов решётки, и
является в данном методе условием окончания поиска
Алгоритм этого метода может быть построен как совокупность
вложенных друг в друга циклов, общим для которых является участок по
расчёту и проверке функций ограничений и критерия оптимальности.
Количество таких циклов равно числу параметров оптимизации.
2.10. Метод статистических испытаний
Этот метод известен также под названиями метода случайного
перебора или метода Монте-Карло. Алгоритм метода основывается на
процедуре просмотра изображающих точек, соответствующих вариантам
объекта проектирования, рассеянных в заданной области пространства
параметров оптимизации, также определяемой условиями (3), но рассеянных
случайным образом в соответствии с равномерным распределением
вероятности. Иными словами данный алгоритм предполагает случайное
равновероятное рассеяние изображающих точек в заданной области
пространства параметров оптимизации и поиск в данном случае строится на
предположении, что вероятность попадания изображающей точки в каждый
участок разбиения (xi,xi+xi) одинакова. Для равномерного рассеяния
изображающих точек по n-мерному объёму необходимо обеспечить
взаимную независимость случайных координат текущей изображающей
точки по всем осям xi.
Точность данного метода, как и метода сканирования, зависит от относительных размеров участков разбиения xi/(ximax–ximin) (или от количества
отрезков разбиения диапазона Ni).
Условие окончания поиска состоит в том, чтобы случайная
изображающая точка хотя бы один раз попала в каждый n-мерный объём,
выделяемый в пространстве параметров отрезками xi и определяемый
(2.13).
С учётом случайного характера событий, это попадание должно состояться с некоторым уровнем доверительной вероятности p. Указанное
условие окончания поиска позволяет определить число изображающих точек
Np, сопоставление которых даёт решение задачи оптимизации, то есть
Np
lg1 p
.
lg1 Δ
(2.15)
где определяется по (2.13).
Особенностью реализации метода статистических испытаний является
необходимость формирования случайных значений параметров оптимизации, которые могут быть получены на ЭВМ с помощью специальных
программ – датчиков случайных чисел. При этом достаточно организовать
только один цикл, в котором бы последовательно просматривались все Np
изображающих точек, причём каждая точка формировалась бы из n
случайных значений координат, получаемых с помощью датчика случайных
чисел.
2.11. Метод –поиска
Алгоритм данного метода построен во-многом аналогично алгоритму
метода статистических испытаний. Основное отличие состоит в том, что в
данном случае изображающая точка выбирается не случайным образом, а из
так называемых –последовательностей чисел, построенных в области
изменения
нормированных
параметров
оптимизации.
Указанные
последовательности являются наиболее равномерно распределенными среди
всех известных в настоящее время последовательностей [4]. Значения
параметров оптимизации в k-й точке поиска определяются соотношением:
xik Qik xi max xi min ,
где
(2.16)
m j 1
1
Qik 2
j 1
m
2 k 2
2 l j
l
l j 1l
2 ri 2
,
(2.17)
m 1 lni ln2,
r il – значение базового числа –последовательности, [z] – целая часть,
{z} – дробная часть числа.
Точность определения экстремума функции цели методом –поиска
задаётся объёмом по (2.13), а условием окончания поиска является
аналогично методу статистических испытаний просмотр такого количества
точек Np, которое обеспечивает гарантированное попадание хотя бы одной
точки последовательности в каждый n-мерный объём области поиска, и
вычисляется следующим образом:
Np
1
.
Δ
(2.18)
2.12. Характеристика оптимизации электромеханических
устройств и систем методами направленного поиска.
Метод градиента
В курсе лекций изучаются и исследуются методы и алгоритмы
направленного поиска оптимальных проектных решений: градиентного,
случайного и покоординатного поиска и рассматривается их применение при
параметрической оптимизации ГД.
Для решения задач параметрической оптимизации ЭМУС находят
широкое применение методы направленного поиска.
В отличие от пассивного поиска для этих методов характерно:
1) целенаправленное движение в области изменения параметров
оптимизации от худшего варианта к лучшему;
2) при этом направление поиска последующей точки определяется
местоположением предыдущей, т. е. конкретный вариант объекта
проектирования, в частности при проектировании ЭМУС – вариант,
например, гироскопического электродвигателя системы управления
летательным аппаратом или генератора системы электроснабжения,
определяется, кроме всего прочего, предыдущим вариантом.
Методы направленного поиска позволяют существенно уменьшить
затраты на определение экстремума функции цели по сравнению с методами
пассивного поиска.
В то же время для методов направленного поиска характерно:
1) более сложные алгоритмы поиска по сравнению с методами
пассивного поиска;
2) они позволяют определить приближение лишь к локальному
экстремуму функции цели в допустимой области изменения параметров
оптимизации;
3) процесс поиска ими существенно затрудняется при наличии
ограничений.
Необходимо более подробно рассмотреть алгоритм этих методов.
Метод градиента
В основе метода градиента, как и других градиентных методов, лежит
организация движения изображающей точки в направлении градиента
(антиградиента) функции цели Q, который определяется соотношением
n Q
i x ,
i
i 1 xi
grad Q
(2.19)
где xi – единичный вектор по оси xi.
По определению градиент это вектор направление, которого совпадает с
направлением, в котором функция возрастает с наибольшей скоростью, а
модуль определяется совокупностью частных производных по переменным.
Алгоритм метода градиента укрупнённо состоит из следующих
основных этапов:
1) Выбирается точка начала поиска. В отличие от методов пассивного
поиска в этом случае поиск должен начинаться из некоторой точки в области
допустимых значений параметров S. Необходимость выполнения этого
требования объясняется тем, что вычисление градиента Q может оказаться
невозможным вне области S, так как нарушения некоторых ограничений
приводят к изменению математических моделей объекта или отдельных
параметров. Для математического описания ЭМУС, в том числе и для ГД,
характерно отсутствие явновыраженных зависимостей функции цели от
параметров, поскольку функциональные зависимости для показателей
объекта проектирования
y j f j x1, x2 , . . . , xn , j 1, 2, . . . , m,
(2.20)
имеют неявновыраженный характер. Поэтому на практике используется
численный метод определения градиента gradQ, в соответствии с которым
даются малые приращения xi каждому нормированному параметру в
отдельности и в результате расчётов определяются соответствующие
приращения функции цели Qi. Тогда выражение (2.19) преобразуется к
виду
n δQ
grad Q i xi ,
i 1 δxi
(2.21)
то есть частные производные заменяются отношениями приращений.
Понятно, что число обращений к модели объекта проектирования возрастает
с увеличением размерности области поиска n.
2) Нормируются изменяемые параметры. Поиск экстремума функции
цели в области нормированных параметров позволяет, во-первых,
преодолеть разнородность параметров оптимизации, во-вторых, отстроиться
от несопоставимости пределов их изменения. Нормирование параметров
осуществляется по соотношению
xi
xi xi min
.
xi max xi min
(2.22)
3) Осуществляется поиск внутри допустимой области изменения
параметров с рабочим шагом h. Для совершения очередного k-го шага в
направлении градиента Q параметры объекта проектирования (координаты
изображающей точки) преобразуются следующим образом:
δQ
h i
Q
δxi k 1
xi, k xi, k 1 b i
xi, k 1
.
x
grad
Q
i k 1
k 1
где b h gradQ
(2.23)
– коэффициент пропорциональности, определяющий
k 1
величину рабочего шага по i-му параметру.
4) На каждом рабочем проверяются ограничения и наличие улучшения
значение функции цели. Если при выполнении очередного шага нарушаются
ограничения или не удается улучшить значение функции цели,
первоначально заданная величина рабочего шага уменьшается, как правило,
в 2 раза, и действия по определению координат изображающей точки,
проверке ограничений и определению значения Q повторяются снова.
5) Деление рабочего шага продолжается до тех пор, пока не будет
достигнуто улучшения значения функции цели или не будет выполнено
условие окончания поиска. Это условие состоит в следующем: если в
выбранном в некоторой точке x N направлении на удаётся выполнить
рабочий шаг, дающий улучшение функции цели и по значению
превышающий некоторое положительное заранее заданное малое число ,
соответствующее, например, нормированному значению отрезка разбиения
xi в методах пассивного поиска, то поиск считается законченным.
Минимальная величина рабочего шага будет в данном случае
характеризовать точность приближения к точке, соответствующей
экстремуму Q в пространстве параметров. Таким образом, условие
окончания поиска следующее:
δQi
δ
x
i k 1
h
h xi ε ,
grad Q k 1
(2.24)
В случае действия ограничений поиск заканчивается при первом выходе
на границу области допустимых значений параметров S.
Особенности реализации алгоритма метода градиента состоят в
следующем:
1) в организации численного вычисления градиента Q, для чего надо n
раз определить значение приращения Q при изменениях параметров xi,
i=1,2,…,n.
2) точность приближения к локальному экстремуму характеризуется
объёмом
-окрестности, которая представляет собой п-мерный
параллелепипед, и определяется следующим образом:
Δ εn ,
(2.25)
2.13. Метод случайного поиска
Этот метод, как и метод градиента, по принятой классификации
относится к группе одноэтапных методов, применение которых
характеризуется одновременным изменением всех параметров оптимизации
на каждом рабочем шаге. В литературе рассматриваемый метод носит также
названия метода возможных направлений или случайного поиска.
В соответствии с этим методом:
1) из некоторой точки в пространстве параметров xk делается
несколько пробных шагов в случайных направлениях;
2) приращения функции цели, полученные на каждом пробном шаге,
сравниваются, определяется направление, в котором улучшение функции
цели наибольшее и которое принимается в дальнейшем за приближение к
градиенту Q;
3) в этом направлении выполняется рабочий шаг, который переводит
изображающую точку в положение xk 1 ;
4) действия по определению случайного градиента повторяются в
окрестности новой точки.
Таким образом, в отличие от метода градиента в данном алгоритме:
1) направление поиска определяется не градиентом функции цели, а
наиболее удачным из пробных шагов, выполненных из k-й точки в
случайных направлениях; при этом координаты текущей изображающей
точки в пространстве нормированных параметров вычисляются по формуле:
xi, k xi, k 1
δxi h
.
δ
(2.26)
где δxi – проекция наиболее удачного пробного шага на ось xi, –размер
пробного шага;
2) для формирования направлений пробных шагов здесь так же, как и в
методе статистических испытаний, нужен датчик случайных чисел; это
обстоятельство определяет особенности построения алгоритма реализации
данного метода в сравнении с методом градиента; в общем случае
количество необходимых пробных шагов определяется из требования
равномерного исследования -окрестности вокруг изображающей точки,
часто оно выбирается равным 5.
В остальном процесс поиска экстремума функции цели здесь идентичен
поиску по методу градиента и ему в равной мере присущи все особенности
метода градиента.
Если число пробных шагов принимается меньшим, чем количество
параметров оптимизации n, то при определении направления поиска
получается выигрыш по числу обращений к модели объекта проектирования
для вычисления значений Q в сравнении с методом градиента. Однако
уменьшение числа пробных шагов приводит к соответствующему
уменьшению вероятности приближения к направлению градиента, а,
следовательно, к возможному увеличению количества рабочих шагов по
определению экстремума функции цели.
2.14. Метод покоординатного поиска
Этот метод является типичным представителем группы многоэтапных
методов поисковой оптимизации и известен также под названиями метода
покоординатного улучшения функции цели и метода Гаусса-Зейделя, а
его алгоритм представляет собой реализацию метода Гаусса-3ейделя. В
соответствии с данным методом поиск на каждом этапе производится
поочерёдно по каждому параметру при зафиксированных значениях всех
остальных:
1) посредством
пробных
шагов
определяется
направление
преимущественного улучшения функции цели при изменении одного
параметра;
2) в выбранном направлении выполняются рабочие шаги h до тех пор,
пока не будет найдено местоположение частного экстремума функции цели,
причём значение изменяемого параметра фиксируется;
3) осуществляется переход на другую координатную ось и поиск
экстремума Q повторяется в той же последовательности при изменении
следующего параметра; здесь, так же как и в других методах направленного
поиска, при достижении экстремума или при приближении к границе
допустимой области производится деление рабочего шага пополам.
Условием окончания поиска по методу Гаусса-Зейделя, как и для всех
методов направленного поиска, является невозможность улучшения
значения функции цели при перемещении из текущей точки на рабочий шаг,
значение которого уменьшено до некоторого положительного заранее заданного малого числа , по каждой из координат. Точность определения
локального экстремума по данному методу вычисляется по (2.24).
При отсутствии ограничений описанный процесс поиска позволяет
определить приближение к локальному экстремуму функции цели, в
окрестности которого находится начальная точка поиска. В условиях
действия ограничений при определённом взаимном расположении линий
равного уровня Q и ограничений поиск может закончиться при первом
достижении границы допустимой области S, когда из текущей точки не
удается сделать шага по любой координате, не ухудшив значения функции
цели. В итоге поиск будет окончен далеко от действительного
местонахождения экстремума Q, и цели оптимизации не будут достигнуты.
К особенностям построения алгоритма метода покоординатного поиска
следует отнести искусственное сведение исходной многопараметрической
задачи оптимизации к однопараметрической на каждом шаге направленного
поиска, что
1) упрощает поиск частных экстремумов Q по каждой координате;
2) позволяет организовать алгоритм, в основе которого лежит
циклический участок программы, по общему правилу определяющий
местоположение частных экстремумов Q по каждому параметру.
ЛИТЕРАТУРА
1. Геминтерн В. И., Каган Б. М. Методы оптимального проектирования.
– М.: Энергия, 1980. – 160 с.
2. Орлов И. Н., Маслов С. И., Крючкова Т. Н. Алгоритмы
оптимизации в автоматизированном проектировании, электромеханических
устройств. М.: Моск. энерг. ин-т, 1983. 112 с.
3. Гиродвигатели / Ю. В. Арбузов, Б. А. Делекторский, В. Б.
Никаноров и др.: Под ред. И. Н. Орлова. М.: Машиностроение, 1983. 176 с.
4. Соболь И. М., Статников Р. Б. Выбор оптимальных параметров в
задачах со многими критериями. М.: Наука, 1981. 110 с.