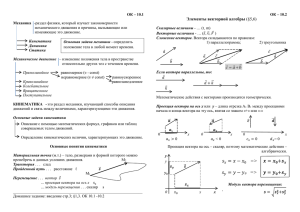
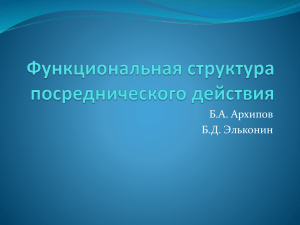
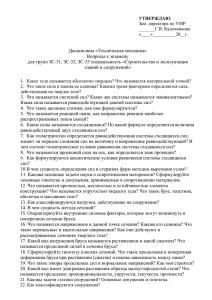
Тема1.1 Основы статики Основные понятия и аксиомы статики. Способы сложения сил. Определение равнодействующей. Связи и реакции связей. Плоская система сходящихся сил. Проекции силы на оси координат. Условия равновесия плоской системы сходящихся сил. Приступая к изучению статики, следует определить основные понятия, встречающиеся в этом разделе. Материальной точкой называют материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать. Материальная точка обладает массой и способностью взаимодействовать с другими телами. Например, автомобиль можно считать материальной точкой при изучении его движения по дороге. Системой материальных точек (механической системой) называют такую совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы. Абсолютно твердым теломназывается тело, в котором расстояния между любыми его точками остаются неизменными. Реальные тела обычно могут изменять свою форму, при этом изменяются и расстояния между отдельными точками тел. Однако, в ряде случаев эти изменения (деформации) настолько малы, что ими можно пренебречь. Это значительно упрощает изучение действия сил на тело и условий, при которых эти силы уравновешиваются. Важнейшим понятием в теоретической механике понятие силы. Сила - это мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия. Сила определяется тремя элементами: числовым значением (модулем), направлением и точкой приложения. Сила изображается вектором (рис. 1.1). Рис. 1.1 Прямая, по которой направлена сила, называется линией действия силы. За единицу силы в Международной системе единиц - СИ принимается ньютон (Н). Системой сил называют совокупность нескольких сил, действующих на данное тело. Системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии, называются эквивалентными. Сила, эквивалентная некоторой системе сил, называется равнодействующей. Сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону, называется уравновешивающей.Приложенная система сил к твердому телу, находящемуся в покое, не выводит его из этого состояния, называется системой взаимно уравновешивающихся сил. Силы, действующие на механическую систему, делятся на две группы: внешние и внутренние. Внешними называются силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе. Внутренними называются силы взаимодействия между материальными точками (телами), рассматриваемой системы. Системы сил могут быть плоскими или пространственными (рис. 1.19). По расположению сил плоские и пространственные системы сил бывают: сходящимися, параллельными и произвольно расположенными. Рис. 1.19 Рис. 1.20 Рис. 1.21 Рис. 1.22 Силы, приложенные к телу в какой-нибудь одной его точке называются сосредоточенными. Силы, действующие на все точки данного тела или данной части тела, называются распределенными. (рис. 1.21, 1.22). ; 1. Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно. Аксиома инерции выражает установленный Галилеем закон инерции. 2. Аксиома равновесия двух сил. Две силы, приложенные к твердому телу, взаимно уравновешиваются только в том случае, если их модули равны и если они направлены по одной прямой в противоположные стороны(рис. 1.2). Рис. 1.2 Рис. 1.3 З. Аксиома присоединения или исключения уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему взаимно уравновешивающихся сил (рис. 1.3). Следствие. Не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль линии ее действия, сохраняя неизменными ее модуль и направление. Рис. 1.4 Рис. 1.5 4. Аксиома параллелограмма сил. Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах(рис. 1.5). Это положение выражается следующим геометрическим равенством: . Модуль равнодействующей силы определяется по следующей формуле: , где - угол между направлениями сил и . 5. Аксиома равенства действия и противодействия. Всякому действию соответствует равное и противоположно направленное противодействие. Эта аксиома утверждает, что силы действия друг на друга двух тел равны по модулю и направлены по одной прямой в противоположные стороны. Таким образом, в природе не существует одностороннего действия силы. Будучи приложенными к разным телам, эти силы не уравновешиваются. Аксиома действия и противодействия установлена Ньютоном и известна как один из основных законов классической механики. Способы сложения сил Большинство задач статики связано с операцией сложения сил и разложения их на составляющие. Величину, равную геометрической сумме сил, называют главным вектором. Рассмотрим способы сложения сил. 1. Геометрический способ сложения сил. Если к телу приложены две силы, то сложить их можно по правилу параллелограмма (рис. 1.6, а) или треугольника (рис. 1.6, б): Главный вектор системы сил определяется либо последовательным сложением сил по одному из описанных выше правил, либо построением силового многоугольника (рис. 1.6, в): 2. Аналитический способ сложения сил основывается на понятии проекции силы на ось, и в его основе лежит следующая теорема геометрии: проекция вектора суммы на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось. Тогда модуль вектора R равен а направляющие косинусы — Рис. 1.6. Сложение сил: а — по правилу параллелограмма; б— по правилу треугольника; в — силовой многоугольник Задача разложения силы на составляющие сводится к нахождению нескольких сил, для которых исходная сила является равнодействующей. Эта задача имеет однозначное решение лишь при дополнительных условиях. Чаще всего сила раскладывается по заданным направлениям: на плоскости — по двум направлениям, в пространстве — по трем. Определение равнодействующей Определение равнодействующей геометрическим способом. Система сил, линии действия которых пересекаются в одной точке, называется сходящейся. Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3;…; Fn), где n – число сил, входящих в систему. В соответствии со следствиями из аксиом статики, все силы системы можно переместить вдоль линии действия, и все силы окажутся приложенными к одной точке. Используя свойство векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил. При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится. Вектор равнодействующей направлен навстречу векторам сил-слагаемых. Такой способ получения равнодействующей называется геометрическим. Многоугольник сил строится в следующем порядке. 1. Вычертить векторы сил заданной системы в некотором масштабе один за другим так, чтобы конец предыдущего вектора совпал с началом последующего. 2. Вектор равнодействующей замыкает полученную ломаную линию; он соединяет начало первого вектора с концом последнего и направлен ему навстречу. 3. При изменении порядка вычерчивания векторов в многоугольнике меняется вид фигуры. На результат порядок вычерчивания не влияет. Условие равновесия плоской системы сходящихся сил. При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец последнего вектора должен совпасть с началом первого. Если плоская система сходящихся сил находится в равновесии, многоугольник сил этой системы должен быть замкнут. Если в системе три силы, образуется треугольник сил. Геометрическим способом пользуются, если в системе три силы. При решении задач на равновесие тело считается абсолютно твердым (отвердевшим). Задачи решаются в следующем порядке. 1. Определить возможное направление реакций связей. 2. Вычертить многоугольник сил системы, начиная с известных сил, в некотором масштабе. (Многоугольник должен быть замкнут, все векторы-слагаемые направлены в одну сторону по обходу контура). 3. Измерить полученные векторы сил и определить их величину, учитывая выбранный масштаб. 4. Для уточнения определить величины векторов (сторон многоугольника) с помощью геометрических зависимостей. Определение равнодействующей аналитическим способом Проекция сил на ось определяется отрезком оси, отсекаемой перпендикулярами, опущенными на ось из начала и конца вектора. Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением сил. Проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси. Проекция силы на две взаимно перпендикулярные оси. Fx = Fcosα > 0 Fy = Fcosβ = Fsinα > 0 Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определим равнодействующую аналитическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси. Складываем проекции всех векторов на оси х и у. FΣx= F1x + F2x + F3x + F4x; FΣy= F1y + F2y + F3y + F4y. Модуль (величину) равнодействующей можно определить по известным проекциям: Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующими с осями координат: Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю. Система уравнений равновесия плоской системы сходящихся сил: При решении задач координатные оси выбирают так, чтобы решение было наиболее простым. При этом желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат. Связи и реакции связей Все тела делятся на свободные и связанные. Свободные тела – это тела, перемещение которых не ограничено. Связанные тела – это тела, перемещение которых ограничено другими телами. Тела, ограничивающие перемещение других тел, называют связями. Силы, действующие от связей и препятствующие перемещению, называют реакциями связей. Реакция связи всегда направлена с той стороны, куда нельзя перемещаться. Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей). Связи делятся на несколько типов. Связь – гладкая опора (без трения) – реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре. Гибкая связь (нить, веревка, трос, цепь) – груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута. Жесткий стержень – стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи. Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент. Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров. Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, так как не допускается только перемещение поперек опорной поверхности. Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее изображают в виде двух составляющих: горизонтальной и вертикальной (Rx , Ry ). Защемление, или «заделка». Любые перемещения точки крепления невозможны. Под действием внешних сил в опоре возникают реактивная сила и реактивный момент Мz , препятствующий повороту. Реактивная сила представляется в виде двух составляющих вдоль осей координат: R = Rx + Ry . Плоская система сходящихся сил Если все силы, приложенные к телу, расположенные в одной плоскости и линии их действия пересекаются в одной точке, то такая система сил носит название плоской системы сходящихся сил. Покажем на рис. произвольное тело, к которому приложена плоская системы сходящихся сил , , ... . При этом линии действия всех сил пересекаются в точке A. Проекции силы на оси координат Часто геометрическое сложение векторов сил требует сложных и громоздких построений. В таких случаях прибегают к другому методу, где геометрическое построение заменено вычислениями скалярных величин. Достигается это проектированием заданных сил на оси прямоугольной системы координат. Как известнее из математики, осью называют неограниченную прямую линию, которой приписано определенное направление. Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым перпендикулярами, опущенными из начала и конца вектора на ось. Проекция вектора считается положительной (+), если направление от начала проекции к ее концу совпадает с положительным направлением оси. Проекция вектора считается отрицательной (—), если направление от начала проекции к ее концу противоположно положительному направлению оси. Рассмотрим ряд случаев проектирования сил на ось. 1.Дана сила Р (рис.а), она лежит в одной плоскости с осью х. Вектор силы составляет с положительным направлением оси острый угол α. Чтобы найти величину проекции, из начала и конца вектора силы опускаем перпендикуляры на ось х, получаем Рх = ab = Р cos α. Проекция вектора в данном случае положительна. 2. Дана сила Q (рис. б), которая лежит в одной плоскости с осью х, но ее вектор составляет с положительным направлением оси тупой угол α. Проекция силы Q на ось х Qх = ab = Q cos α, но cos a = — cos β. Так как α > 90°, то cos cos α — отрицательная величина. Выразив cos α через cos β (β — острый угол), окончательно получим Qх = — Q cos β В этом случае проекция силы отрицательна. Итак, проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. При определении проекции вектора силы на ось пользуются обычно косинусом острого угла, независимо от того, с каким направлением оси — положительным или отрицательным — он образован. Знак проекции легче устанавливать непосредственно по чертежу. Силу, расположенную на плоскости хОу, можно спроектировать на две координатные оси Ох и Оу. Рассмотрим рисунок. На нем изображена сила Р и ее проекции Рх и Ру. Ввиду того что проекции образуют между собой прямой угол, из прямоугольного треугольника ABC следует: Этими формулами можно пользоваться для определения величины и направления силы, когда известны ее проекции на координатные оси. Эти же формулы могут применяться для определения величины и направления любого вектора через его проекции. Условия равновесия плоской системы сходящихся сил Для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю. 1) Геометрическое условие равновесия сходящейся системы сил: для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут (конец вектора последней слагаемой силы должен совместиться с началом вектора первой слагаемой силы). Тогда главный вектор системы сил будет равен нулю ( ). 2) Аналитические условия равновесия. Модуль главного вектора системы сил определяется по формуле . Поскольку , то подкоренное выражение может быть равно нулю только в том случае, если каждое слагаемое одновременно обращается в нуль, т.е. Rx = 0, Ry = 0, Rz = 0. Следовательно, для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трёх координат осей были равны нулю: , , . Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы суммы проекций сил на каждую из двух координатных осей были равны нулю: , . 3) Теорема о трех силах. При решении некоторых задач статики можно воспользоваться следующей теоремой: если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости (рис. 1.29), то линии их действия пересекаются в одной точке (необходимое условие равновесия твердого тела). Рис. 1.29 Это условие равновесия не является достаточным, т.к. равнодействующая этих сил может оказаться не равной нулю. Достаточным условием является наличие замкнутого силового треугольника при одновременном пересечения линий действия трех сил в одной точке. Рассмотрим тело, на которое действуют три непараллельные силы 1.30). , и (рис. Рис. 1.30 Так как эти силы непараллельны, то две любые силы, например, и должны пересечься в некоторой точке А. Перенесём силы и вдоль линии их действия и приложим их к точке А. Заменим сходящиеся силы и их равнодействующей . Следовательно, теперь на тело действуют только две силы и . Поскольку тело находится в равновесии под действием двух сил, то согласно первой аксиоме статики, эти силы должны действовать вдоль одной прямой АВ. Таким образом, линия действия силы должна проходить через точку А.