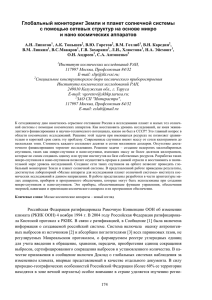
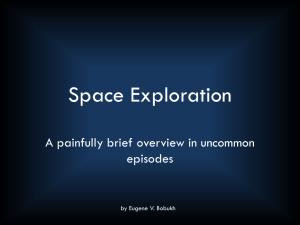
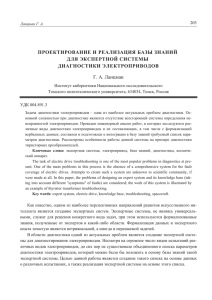
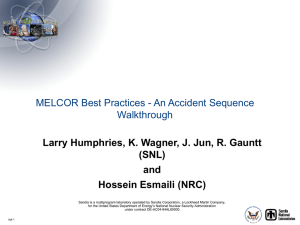
Chinese Journal of Aeronautics, (2022), 35(3): 128–154 Chinese Society of Aeronautics and Astronautics & Beihang University Chinese Journal of Aeronautics [email protected] www.sciencedirect.com REVIEW Solid rocket propulsion technology for de-orbiting spacecraft Adam OKNINSKI Center of Space Technologies, Lukasiewicz Research Network - Institute of Aviation, Warsaw 02-256, Poland Received 1 November 2020; revised 7 December 2020; accepted 25 January 2021 Available online 21 October 2021 KEYWORDS De-orbit; De-orbiting technology; End-of-life disposal; Satellite propulsion system development; Solid propellant; Solid rocket motor; Space debris mitigation; Space traffic management Abstract This paper presents the topic of using solid rocket propulsion for de-orbiting spacecraft, in order to fulfil space debris mitigation requirements. The benefits and disadvantages of using such means are discussed. A dedicated system can be implemented in the satellite design phase and shall be a key subsystem of platforms inserted into orbit. Uncontrolled, semi-controlled and controlled de-orbit can be completed using solid rocket motors. Their impact on the space debris environment is discussed. Specific requirements for dedicated propellants and systems are provided. While the majority of presently developed rocket systems worldwide require high burn rates, several applications, including de-orbiting, benefit from solid propellants with decreased regression rates. This allows limiting spacecraft accelerations and loads during de-orbit manoeuvres. Moreover, the requirement of minimising solid particle generation is presented. Heritage technology from the Mercury and Gemini human spaceflight programmes, where de-orbit motors were used, is shown. Historical Soviet, American and Chinese film-return-capsule solid propellant retrorockets, enabling deorbit, are also presented. A detailed survey of current work worldwide on end-of-life disposal using solid propulsion is included. Challenges of developing dedicated systems are discussed. Finally, an outlook on solid rocket motor utilisation for space debris mitigation is provided. Ó 2021 Chinese Society of Aeronautics and Astronautics. Production and hosting by Elsevier Ltd. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/). 1. Introduction While initial research on threats possible due to human-made space debris began in the United States during the 19700 s, first recommendations were stated by Kessler and Cour-Palais in 1978 and early standards (titled ‘‘System safety requirements for ESA space systems”) were formulated in Europe by 1988. However at that point they were not yet directly devoted to Space Debris Mitigation.1 This was followed by dedicated standards in the United States, Japan and France in the last years of the 20th century.2 It became clear that the key method to limit new space debris generation is to avoid allowing new E-mail address: [email protected] Peer review under responsibility of Editorial Committee of CJA. Production and hosting by Elsevier https://doi.org/10.1016/j.cja.2021.07.038 1000-9361 Ó 2021 Chinese Society of Aeronautics and Astronautics. Production and hosting by Elsevier Ltd. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/). Solid rocket propulsion technology for de-orbiting spacecraft 129 Abbreviations ADN AP EoL ESA HNF HTPB ICBM IPOL ISS LEO Ammonium Dinitramide Ammonium Perchlorate End-of-Life European Space Agency Hydrazinium Nitroformate Hydroxyl-Terminated Polybutadiene Intercontinental Ballistic Missile Internal Policy International Space Station Low Earth Orbit objects to remain in orbit after their end-of-life.3,4 Extensive work during the last two decades enabled raising the awareness of the space technology community. One of the forums allowing global discussion is the Inter-Agency Space Debris Coordination Committee (IADC).5,6 Since 2009 the problem of space debris became more evident due to the collision of Iridum-33 and Kosmos-2251 satellites and an earlier successful antisatellite weapon test by China in 2007. It became clear that post-mission disposal is crucial for limiting the speed of growth of the debris population.7 While Active Debris Removal is necessary to decrease the number of existing large debris8–10, it is a very costly approach and the main solution is to make sure that all new objects delivered to orbit will have a system enabling decreasing their orbital lifetime after the end of their operations. This is crucial in order to secure existing orbital assets, such as the International Space Station.11 The problem becomes even more serious due to the growing concentration of satellites on relatively similar orbits, as shown in Fig. 1.12 The MASTER debris model is constantly updated and the significant change in debris spatial density can be analyzed. Moreover, numerous smaller spacecraft, unlike few large ones, are planned to be used in LEO mega constellations. Satellites are expected to be launched more frequently with limited lifetime due to the present business approach and technology becoming obsolete since the beginning of the given satellite’s payload development. Within the Space 4.0 trend numerous new players occur, some with limited experience and a multitude of small satellites with questionable reliability are close Fig. 1 Debris spatial density distribution on LEO: data from 2009 and 201812. GEO Geostationary Orbit GTO Geostationary Transfer Orbit RESI Reduced Signature SDM Space Debris Mitigation SPADES Solid Propellant Autonomous DE-orbit System SSO Sun Synchronous Orbit SRM Solid Rocket Motor TRL Technology Readiness Level TVC Thrust Vector Control to getting to orbit. With over 1000 satellites being launched per year in a few-year horizon, a significant market for endof-life disposal can be seen. The establishment of the Clean Space initiative at ESA confirmed Europe being one of the leaders in Space Debris Mitigation.13,14 As of 2020 ESA has its dedicated Space Safety programme, including work on SDM. Meanwhile efforts worldwide continue to unify international standards15 and space law. While a few years back spent satellites were to be de-orbited or re-orbited to higher cemetery orbits, recent guidelines propose not to use the concept of reorbiting for LEO, due to it not being forward-thinking in the age of intensive orbital infrastructural expansion.1 More details on the current status of SDM can be found in Refs.16,17. Discussions lead to the conclusion that apart from EoL disposal, Just-in-time-Collision Avoidance capability18,19 and a Space Traffic Management are needed in order to ensure sustainability of orbital operations.20,21 In case of Just-in-time Collision Avoidance recent concepts include use of SRM plume for debris deceleration.22 However this review shall focus solely on EoL propulsive disposal. The key current requirement concerning spacecraft de-orbit is to conduct re-entry within 25 years from the satellite’s EoL.23 This means that all satellites on orbits above approximately 600 km (value depending on the exact orbit, solar activity, the mass-to-area ratio of the object and aerodynamic configuration) shall require a system enabling their deorbitation in order to fulfill the 25-year rule. The probability of successful EoL disposal is to be at least 90%. The manoeuvre shall ensure that the risk of casualties on ground is less than 104, what can be assessed analytically using dedicated tools for re-entry breakup analysis.24 The amount of generated debris while using propulsion, shall be limited. In particular debris over 1 mm of size are unacceptable. ESA Internal Policy (IPOL) on SDM excludes the release of particulate matter in orbit. Most recent recommendations are provided in Ref.15. However a lot is yet to be done, especially taking into account numerous planned commercial mega constellations. The European Cooperation on Space Standardization (ECSS) adopted ISO24113 in the space sustainability branch.23 Particular SDM standards adopted by specific countries can be found in Ref.25. Methods for end-of-life de-orbiting of spacecraft include chemical rocket propulsion, electric propulsion, sails, tethers etc.10,26 Several de-orbiting strategies can be used: uncontrolled, semi-controlled and controlled de-orbit. In most cases only chemical propulsion enables obtaining relatively large 130 A. OKNINSKI itage, while most commonly used mono- and bipropellants include toxic compounds and are to be replaced in the longer term. The key benefit of solid propulsion is its high density performance, storability and autonomy. Several trade-offs show good potential for use of solid rocket propulsion for EoL disposal29,33,34 and this technology shall be discussed in this paper. Other analyses considering use of SRM can be found in Refs.35,36, but no survey of existing technical solutions and heritage is commonly available. From the technical point of view, each of the four mentioned chemical propulsion methods is feasible for use for de-orbiting. In today’s market the economic and operational factors shall be decisive. Chemical propulsion allows de-orbitation for all spacecraft sizes as well as for launch vehicle upper-stages and jettisoned components (such as Sylda, Speltra).30 De-orbit manoeuvers are done for SDM, but also for re-entry and recovery of payloads. This relates to human spaceflight, biological payloads and recovery of reconnaissance film capsules. It can also be due to safety measures, as in one of the first concepts mentioned in 1966 - due to nuclear waste hazards of Systems for Nuclear Auxiliary Power (SNAP) satellites.37 Typical deorbit manoeuvres for objects on LEO require delta-Vs of up to a few hundred m/s, depending on the initial orbit, re-entry flight path, satellite configuration and type of disposal (uncontrolled or controlled de-orbit). Example data is presented in the following paragraphs. 2. Scenarios for modern application of SRM technology for SDM Fig. 2 Outcome of ESA Solid Propellant Autonomous DEOrbit System (SPADES) study comparison regarding use of different chemical propulsion systems for de-orbit30. thrust, which allows for controlled and semi-controlled deorbit.8,27 Chemical propulsion includes solid rocket motors, hybrid rocket motors, monopropellant thrusters, bipropellant engines and cold gas systems.28 While the last technology is usually discarded due to very low performance, the other four are commonly compared considering SDM.29 Monopropellants and bipropellants are often assumed as natural candidates due to their wide use on satellites and their significant flight heritage. Fig. 230 presents results of a dedicated ESA study comparing liquid and solid propulsion for deorbit─relative costs, mass budget differences due to required spacecraft velocity increase (delta-V) and expected reliability have been computed for different spacecraft sizes. Bipropellants were not considered for satellites below 200 kg of mass due to system complexity. Reference missions considered SSOs. Solid propulsion was identified as very promising. More details on the study and its assumptions can be found in Ref.29. Several modern concepts consider hybrid propulsion as one of the best technical solutions for EoL disposal.31,32 Unlike for typical SRM, reignition and adapting the delivered total impulse is possible. However, hybrids lack in-orbit flight her- Three typical approaches are discussed for EoL disposal using chemical propulsion. These include: uncontrolled, semicontrolled and controlled de-orbitation, presented in Fig. 3.38 The primary driver affecting the decision on the necessary re-entry scenario is the ground casualty risk. This decision must be taken already during the spacecraft initial development phase, since it is the key aspect influencing propulsion system sizing and autonomous SRM implementation in the platform. Typical components and subsystems which are decisive regarding spacecraft demisability include: propellant and pressurant tanks, reaction wheels, magneeters and solar array drive mechanisms. The first solution, uncontrolled de-orbit, requires transferring the given satellite to an orbit, which ensures that the 25 year disposal rule is fulfilled.29 This leads to a long de-orbit duration. One will not know exactly when and where the debris will re-enter the dense layers of Earth’s atmosphere. Therefore, large, not-fully-demisable objects should not be subject to this scenario. Only satellite disposal with ground casualty risk below 104 can be allowed for this type of re-entry. The second approach – semi-controlled reentry – enables ensuring that the debris will fall within a few or preferably one orbit.39,40 This way it is possible to limit casualty risk, despite a large possible impact area, via targeting re-entry to occur over ocean areas. It is the most expensive and complex scenario and is inevitable for large satellites and launch vehicle upper-stages.39 Objects are targeted to enter the thicker layers of the atmosphere with an angle of approximately 1.5° and fall into the South Pacific Ocean Uninhabited Area (SPOUA), which is believed to be the safest place for re-entry in order to mitigate casualties: both in lives and property. Since 1971 over 260 satellites have been directed into this Solid rocket propulsion technology for de-orbiting spacecraft Fig. 3 131 EoL spacecraft removal strategy decision tree by Airbus Defence & Space38. area.40 Considering a single burn and a Hohmann-like manoeuvre, the spacecraft will have its new perigee in the dense layers of the atmosphere, re-entering half an orbit after the burn delivery. Commonly a perigee altitude of 80 km or lower is assumed to allow immediate EoL disposal. Direct controlled de-orbitation limits the overall disposal time to a minimum.41 While a single burn scenario is considered in most cases, ESA data on the difference in delta-V for a two-SRMburn scenario for de-orbit is also available in Ref. 30. Delivering a few consecutive burns is possible using an SRM cluster. Clusters are anyhow expected in many satellite applications since long total burn durations are needed to limit maximum thrust and acceleration for spacecraft with fragile appendages. To ensure having the thrust vector aligned with the spacecraft’s centre of mass, firings of SRM pairs are typically proposed.27,30,41 In case of firing a single SRM, it is difficult to precisely control the impact location when initial high LEO is considered.42 Therefore a stepped scenario of controlled de-orbitation has been proposed by European Large Satellite Integrators. This way the first step would be performed by the satellite’s main propulsion system (potentially electric) and would lower the orbit from the nominal operational orbit of the given satellite to a circular orbit of approximately 300 km of altitude. The second manoeuvre, completed using the dedicated SRM system, would lower the orbital perigee altitude from 300 km to below 80 km, thus allowing controlled re-entry. For a conservative perigee altitude of 40 km, the theoretical delta-V is 77 m/s. This approach allows precise control of the re-entry footprint and makes efficient use of the SRM’s high thrust, while combining the SRM firing with an earlier delta-V delivered by a potentially higher specific impulse system. Another propellant-efficient method for controlled deorbitation assumes an active propulsive phase, followed by a passive phase when drag furtherly decreases the satellite’s orbit and a final firing is concluded after the passive phase.33 However, while limiting the total necessary delta-V, it requires lengthening the mission duration in comparison to direct controlled de-orbitation, thus increasing costs. While as mentioned, for circular orbits below approximately 600 km no propulsion system firing is required to limit the orbital lifetime to 25 years, higher orbits require delta-V capabilities of spacecraft. For example for a typical 800 km cir- 132 Fig. 4 Effect of initial circular orbit altitude and re-entry flight path angle on necessary delta-V to de-orbit34. cular SSO, lowering the orbit perigee to 80 km via a Hohmann transfer, thus allowing re-entry, is equivalent to a 200 m/s delta-V.43 Initial circular orbits were found to be the most demanding in terms of delta-V budget.43 There are cases when propulsion system firing is needed for very low orbits. This occurs in the case of controlled re-entry requirements. In general controlled re-entry leads to higher delta-V requirements for de-orbit propulsion systems for a given initial orbit (unless the de-orbit propulsion system is only used for the final burn and the majority of the orbital altitude change is done utilising the satellite’s main propulsion system). Different levels of thrust can be used. 34 explains that a low-thrust continuous firing manoeuvre results in a spiral-type trajectory and leads to a higher delta-V than in case of impulsive manoeuvres. Fig. 434 shows the necessary delta-V to enable a Hohmann transfer manoeuvre for several initial circular orbits in order to have reach a flight path angle in the range of 1.5° to 2.5° at 120 km of altitude.34 3. Up to date use of solid rocket propulsion for space applications Solid propellant motors are the first historical developments for both military and civil rocket propulsion applications. World War 2 advancements in the field of efficient castable composite solid propellants led to increased work on novel compositions and brought the introduction of Ammonium Perchlorate, which replaced Potassium Perchlorate as oxidizer in the late 1940’s.44 Further developments included work on new binder systems and in 1958 aluminium fuel was proposed by Rumbel and Henderson for performance improvement. Major relevant work in the Soviet Union took place in the 19600 s, however significant theory of combustion was introduced in the preceding decades.45 Space applications include use of solid propellants in i.e. boosters, main-core propulsion, ullage motors, separation motors, spin-control motors, launch abort systems, gas generators, landing, deceleration, descent and recovery systems. Further in-space use of SRMs has been performed numerously through utilisation of SRM kick stages.46 The first successful use of an SRM in orbit, apart from ullage SRMs etc., was in the third stage of the Vanguard vehicle in March 1958. The Grand Central 33KS2800 SRM used a polysulfide and AP composite propellant, designated GCR-201C.47 Other historical solid propellant upper stages were present in vehicles including: Thor-Delta (since 1960), Delta (1962), Scout A. OKNINSKI (1964), Thor-Burner (1965), Lambda 4 (1970), Mu vehicle family (1971), Long March 1 (1970) and Black Arrow (1971). Up till today several active launchers use SRMs in their upper-stages, although most new architectures under development utilise liquid upper-stages for enhanced mission flexibility for a wide range of payloads. Historical in-orbit use of SRMs also includes propulsion for reaching GEO from GTO and to perform interplanetary trajectories. Example kick motors include STAR systems from ATK and European MAGE motors.48,49 One of the SRM which was the beginning of the STAR motor family is the retrorocket of the Surveyor unmanned lunar lander, the STAR-37.50 The B-4 Surveyor retrorocket used over 600 kg of propellant, having a burn duration of approximately 40 s and a thrust level of 44 500 N.51 While it was the main contributor to the spacecraft deceleration, it was ejected before final touchdown.52 Similarly, the Europa lander mission currently planned by the Jet Propulsion Laboratory, considers an SRM for final vehicle deceleration.53 An off-loaded STAR-48B SRM is proposed for the de-orbit burn.54 The topic of this paper, however, focuses on applications of dedicated de-orbit motors, used in Earth orbit, thus solid propulsion for exploration descent elements is only mentioned. Several other applications are shown, in case of similar propellant or system requirements. 4. Aluminised propellant impact on space debris environment Current state-of-the-art solid propellants usually include aluminium powder. For typical SRMs more than 30% of the initial propellant mass is expelled as Al2O3.55,56 However, most particles rapidly re-enter the thicker layers of the atmosphere57 and less then 5% of aluminium oxide particles survive over 1 year in orbit.58 This is naturally highly dependent on the orbit considered and SRM firing conditions.59,60 Particle size, area and surface shape affect drag and particle orbital lifetime, while J2 gravitational potential zonal harmonics, solar radiation pressure and luni-solar attraction also play a role.61 Dust particles have exhaust velocities up to 3000 m/s. While metalized formulations generate small particles during nominal operation, tail-off burning at lower combustion chamber pressures leads to significant oxide slag. This is presented in Fig. 562, where nominal and tail-off SRM performance in high-altitude conditions are shown for the first stage of the Pegasus launch vehicle and in Fig. 662 with the STAR-37 SRM during vacuum ground testing. While most debris from SRM firings are below 10 lm of diameter, research shows that bits of Al2O3 exceeding 10 mm in diameter are common for SRM burn tail-offs. Some sources mention particles up to 50 mm of size, with velocity emissions in the order of tens of metres per second.62 The mass ejected during tail-off is approximated as in the range of 0.04%-0.65% of the initial propellant mass. Since during this transient period low ejection velocities occur, low relative velocities are present and lead to slag orbits being close to the orbits of the SRM themselves.63 Ref. 60 discusses various non-numerical methods of studying the effect of SRM solid ejecta. Examples from radar observations, particle impacts on space vehicle surfaces and data from ground tests of SRMs are available. The relation between expelled particle size and SRM nozzle throat diameter is discussed in Ref. 64. However, the dependance of Al2O3 size on SRM dimensions was already suggested in Refs. 56,65. Solid rocket propulsion technology for de-orbiting spacecraft 133 Fig. 5 Pegasus launch vehicle first stage SRM firing: caption before burn tail-off (left) and caption taken 15.5 s after burn tail-off (right)62. Fig. 6 STAR-37 SRM tests at a vacuum facility: steady-state burning with chamber pressure above 3.1 MPa (left) and burn tail-off with chamber pressure below 7 kPa (right) 62. Ref. 66 presents the key sources of large objects in orbits up to 2000 km in altitude. One can see the large impact of SRM slag, which is larger than of sodium–potassium alloy (NaK) droplets released from orbital nuclear reactors before the end of the 19800 s, and significantly larger than that of LMRO (Launch and Mission Related Objects). The main source of large debris are fragments of vehicles. Ref. 66 also shows the spatial density of debris on LEO. It can be seen that a relatively constant spatial density is present in case of SRM slag, decreasing for altitudes below 400 km, where orbital residence time is low. In Ref. 63 , results of slag spatial density modelling for LEO, GTO and GEO SRM firings are shown. Fig. 7 and Fig. 8, taken from Ref. 67, provide insight into debris source population fluxes as of 2014, based on the ESA MASTER2009 model (Meteoroid and Space Debris Terrestrial Environment Reference). Data for the International Space Station (ISS) orbit, a typical SSO (used by Defense Meteorological Satellites), as well as GTO and GEO is presented. The highest cumulative debris flux originating from SRMs among the four orbits considered is visible for the SSO. Fig. 7 and Fig. 8 show the distinction between SRM dust and slag. The range of debris between 1 and 10 mm is marked and referenced as the critical size range. This is due to its particular importance for human and robotic space programmes since such debris are usually not tracked, while being large enough to pose threat to missions.67 Fig. 963 presents the expected growth of debris spatial density in case of continuing the use of aluminised propellants in-orbit. It can be seen that, apart from orbits below 1000 km of altitude, peaks of SRM-related debris occur for approximately 20 000 km and 36 000 km altitudes. These represent firings dedicated to the circularization of orbits of the GPS constellation and transfer orbits into GEO.63 Ref. 59 shows that the slag population growth will continue, even taking into account presently limited in-space use of SRMs and a recommendation to forbid orbital use of SRMs is given. The same reference provides information that the largest amount of particles are approximately 100 mm in diameter and the most slag residue comes from apogee kick motors. Ref. 63 recommends limiting orbital SRM use, in particular for Medium Earth Orbits and GEO regions, where particle residence times are long. More data can be found in ESA MASTER, which allows to assess the distribution of SRM ejecta on Earth orbits. Over 1100 in-orbit SRM firings have been registered since 1958. More information is provided in Refs. 59,60,68. The ESA Clean Space initiative has been looking into the topic and non- 134 A. OKNINSKI Fig. 7 MASTER-2009 debris source population fluxes for ISS orbit (left) and example SSO (right) Fig. 8 MASTER-2009 debris source population fluxes for GTO (left) and GEO (right) 67 . 67 . 5. American de-orbit SRMs Fig. 9 Prediction of debris spatial density growth assuming current SRM rate of utilisation 63. aluminised propellant research was initiated in 2013 to ensure the possibility to use solid propulsion for EoL spacecraft disposal. Limiting solid combustion products is critical for modern SDM propellant compositions. This ensures compliance with SDM requirements and safety of solar arrays and other critical satellite components, as well as human spaceflight missions. Use of SRM for de-orbiting applications began at the very beginning of the space age. However, re-entry was attempted not for the need of SDM, but to recover valuable hardware with data or to recover human spaceflight capsules. The Corona spacecraft family used capsules to recover photoreconnaissance films.69 Each satellite had one or two capsules, each with a STAR-12 SRM attached.70 The first launch of a Corona spacecraft took place in 1959. Fig. 1071 presents Corona J-1, which had two recoverable capsules, which was the spacecraft’s version used most extensively (52 satellites with 94 film recoveries during 1963–1969).72 The STAR-12 SRM had a gross mass of 28 kg, propellant mass of 18.28 kg, vacuum thrust of 4450 N and burn duration of 10.4 s, providing a vacuum specific impulse of 256 s. It had an external diameter of 305 mm and a compact envelope due to the use of an end-burning grain configuration. Use of small film re-entry capsules was continued through a few decades via operations of the Corona spacecraft, as well as KH-5 Argon, KH-6 Lanyard, KH-7 Gambit, KH-8 Gambit 3 and the much larger KH9 HEXAGON, which included five return capsules using one SRM each. It is shown in Fig. 11.71 More recent American photoreconnaissance satellites used electro-optical and syn- Solid rocket propulsion technology for de-orbiting spacecraft Fig. 10 Fig. 11 135 Corona spacecraft draft with de-orbit SRMs 71 . HEXAGON spacecraft draft with de-orbit SRMs71. thetic aperture radar payloads, thus not requiring retromotors for film re-entry. As for human spaceflight, SRMs also developed by Thiokol Chemical Corporation were used for de-orbiting the Mercury spacecraft. A design very similar to TE-M-236 (STAR-12) from the Corona programme was used. The Mercury capsule was fitted with 3 retrograde motors also called retrorockets (term not to be confused with retrorockets used for launch vehicle stage separation). Each SRM had a burn duration of 10 s. The motors were fired with 5 s intervals between the end of one firing and the initiation of the firing of the next one. Successful de-orbitation was possible even if one of the SRMs failed, due to the corrections of the automatic control system. Each of the SRMs had a mass of 30.1 kg and 5100 N of thrust.73 Their position in the vehicle is shown in Fig. 12.73 SRMs were protected from contamination and micrometeor damage due to the use of a metal housing. The SRM had a length of 368 mm and diameter of 305 mm. The de-orbit subsystem was jettisoned after performing the burn.73,74 The Mercury de-orbit motor is shown in Fig. 1375 (next to the Gemini SRM). Key SRM parameters are provided in Table 1. Similar SRMs of Thiokol Chemical Corporation were used in the Gemini spaceflight programme. The TE-385 was a 136 A. OKNINSKI Bottom view of Mercury capsule (left) and Mercury retrograde rocket system (right)73. Fig. 12 Fig. 13 Table 1 Mercury TE-316 (left)75 and Gemini TE-385 (right)77 used for de-orbiting manned capsules. Key data of Mercury and Gemini SRMs for capsule de-orbiting. Application Designation Mass of motor (kg) Empty mass (kg) Burn duration (s) Total impulse (Ns) Nominal thrust (N) Length (mm) Diameter (mm) Specific impulse (s) Mercury TE-316/TE-M316 TE-385/TE-M385/Star-13E 30.1 8.16 10 45800 5100 368 305 206 31 6.00 5.4–5.7 63160 11500 559 330 211 Gemini derivative of the STAR-13 TE-M-485 orbit insertion motor.76 Four TE-385 motors were used for de-orbiting the capsule and fired in ripple fashion.77 Apart from this, the SRM could be used during a high altitude launch abort, separating the capsule from the launch vehicle. This however never took place. SRMs were used for mission de-orbit in ten manned Gemini flights in 1965 and 1966. Details on the Gemini TE-385 design can be found in Ref. 78. Key motor parameters and its comparison to the Mercury TE-316 can be seen in Table 1. The motor had a star grain configuration and used a polysulfide-based propellant. A spherical titanium alloy combustion chamber was used. The SRM had a submerged nozzle configuration, the expansion cone was made from molded vitreous silica phenolic resin and the throat insert was made from high density Graph-I-Tite G-90 graphite. While Mercury and Gemini capsules used SRMs for deorbiting manned spacecraft, future American designs did not include SRMs for de-orbiting manned capsules. Neither has this approach been utilised in Russian or Chinese vehicles (Soyuz and Shenzhou). Use of SRM for de-orbiting manned capsules is expected to remain only a historical solution. Solid rocket propulsion technology for de-orbiting spacecraft As for newer designs, a wide range of SRMs is provided in the ATK SRM catalogue.48 The document features the STAR3A motor being advertised as useful for de-orbitation missions. This motor thrust peaks at 800 N but burns only for 0.5 s, providing an effective specific impulse of 241.2 s. Such a short boost either generates too high accelerations for small satellites or requires clustering for bigger ones since its total impulse is equal to 284 Ns. The STAR-4A on the other hand has an end-burning configuration,79 giving a burn duration of 10.3 s and a total impulse close to 2650 Ns, while having a propellant mass fraction of 0.65 and delivered specific impulse of 269.4 s. The ATK catalogue also provides another SRM for minimum acceleration and extended burn duration delta-V impulse, which is the STAR-5A,48 which has a burn duration of 24.7 s and a total impulse of 6000 Ns, providing an effective specific impulse of 250.8 s. This SRM has 2.3 kg of propellant and a propellant mass fraction close to 0.50.80 Another example of using an American SRM for de-orbit is the Japanese concept of the Lunar-A penetrator, which was to use ATK Thiokol’s STAR-30BP motor to provide 84% of the required total deceleration delta-V.81 Fig. 14 presents the penetrator with the attached SRM for de-orbit.82 However, the Lunar-A project was never finalised. 137 Fig. 15 Mass of released orbital dust and slag due to in-orbit firings of Soviet and Russian SRMs84. 6. Soviet and Russian de-orbit SRMs Numerous Soviet and Russian photoreconnaissance missions utilised SRM for de-orbiting capsules, as well as satellites. The primary objective was to return exposed film to Earth.83 Three different systems have been used extensively: Zenit, Yantar, and Orlets. Their sketches are shown in Ref. 84. Fig. 1584 presents the timeline of major technology utilisation. The maximum of de-orbits was achieved in the mid-1980’s at southern latitudes between 60° and 80°. The contribution of the Zenit retro-firings is dominant. Almost all firings took place between 150 and 400 km of altitude.59 Key SRM data are presented in the following paragraphs.84–86 Fig. 1684 shows parts of Zenit, Yantar, and Orlets, which were recovered, using SRMs. The de-orbit propulsion system of the Vostok used a liquid propellant engine of OKB-1, but the NII-125 design bureau in parallel developed an SRM alternative, the Vostok-Meteor Fig. 14 Fig. 16 Zenit with the TTDU SRM (top), Yantar-2 K’s SpK with the 11D864 SRM (bottom left), and Orlets-1 capsule with TOR (17D712) (bottom right) (drawing of Orlets-1 film return system is an artist view) 84. kick stage. It was implemented in the Zenit satellite series (and flew on Zenit-4 M, 4MT and 4MK).87 The SRM was used to de-orbit the whole 6000 kg satellite. The SRM was named TTDU and had a designation 11D82M. It is shown in Fig. 1788. Ref. 84 states that 508 in-orbit firings were com- Lunar-A penetrator with its SRM for deceleration82. 138 A. OKNINSKI Fig. 19 Fig. 17 TOR (17D712) propulsion module85. Zenit spacecraft’s TTDU SRM assembly88. pleted. 11D82M had a thrust level of 30.7 kN, a propellant mass of 246 kg and a burn duration of 23 s. The fourth generation reconnaissance satellite Yantar-2K used 11D864 MKB Iskra SRMs for de-orbiting its two small capsules named SpK (Spuskayemaya Kapsula). Initial inspace testing of the capsules with the dedicated SRM took place on the Gektor spacecraft.89 The SRM is can be seen in Fig. 1889 and its location on-board the Yantar spacecraft is visible in the left photograph. A toroidal gas reaction engine (8005D-0) was present around the SRM. It was used for stabilizing the capsule after braking and for angular velocity control.83 In total 250 in-orbit firings are known to have taken place.84 The SRM had a mass of 52 kg and a burn duration of 13 s at a nominal chamber pressure of 8 MPa. Being 450 mm long, it had a diameter of 380 mm. The de-orbited mass was 274 kg, including 29 kg of payload. The 11D864 had a thrust of 5.9 kN.83 The third major SRM for de-orbit in Soviet programmes was used in Orlets capsules. 122 SRM retro-burns took place in the Orlets programme till 2009.84 Sixth generation photore- Fig. 20 Impact of Soviet and Russian SRM firings on space debris84. connaissance satellites with return film capsules (Orlets-1) had 8 capsules, while the seventh generation of the spacecraft (Orlets-2) has 22 capsules.59 Each of the capsules uses a dedicated TOR (17D712) SRM for de-orbit, which has a toroidal shaped combustion chamber and utilises four nozzles.85 It is shown in Fig. 1985. The SRM length is 190 mm, outer diameter 350 mm and inner diameter 205 mm.84 Its mass is 17 kg, out of which 8 kg is the mass of the propellant. Ref. 90 mentions that the 17D712, developed at the Federal State Unitary Enterprise Fig. 18 Yantar-2 K spacecraft (left) and its descent capsule with the 11D864 SRM (right) (photos obtained with permission from Mr. Jakob Terweij)89. Solid rocket propulsion technology for de-orbiting spacecraft 139 Design Bureau ‘‘Arsenal”, could be regulated and deliver a precise impulse. Another example of SRM de-orbit technology application is the Mars 96 de-orbit retrorocket, which was to provide a de-orbit burn with a delta-V of 30 m/s to land the Mars soil penetrator.82 However, this has not been demonstrated due to a failure of the launch vehicle. In summary, a large amount of the known in-space SRM firings are due to Soviet and Russian activity. Fig. 2084, however, shows that these firings are not the major contributor to the orbital SRM dust. Russian retro-burns pose no ongoing long-term impact on the debris environment. This is mainly due to the fact that very low altitude firings were done, mainly in order to recover photoreconnaissance capsules. As for slag, the exhaust velocity was very low and the objects were expelled during the end of the burn only, when the orbit of the capsule was already significantly lowered. This occurred in near-tocircular orbits for slag released from the TTDU and 11D864 motors and resulted in immediate re-entry. Generated particle clouds are considered to have had orbital lifetimes of up to half a year.59 the re-entry system was fired very steeply downward from orbit. Ref. 101 mentions that the SRM injected the capsule into a 179 km 3031 km orbit with an inclination of 56°. This required a very large delta-V, significantly exceeding delta-Vs of similar Soviet and American missions, which are estimated as about 175 m/s. Ref. 100 mentions a delta-V of 650 m/s – such a manoeuvre was used and ensured that the re-entry command could be given to the spacecraft while it was over China and the direct descent trajectory provided near certainty that the capsule would be recovered on Chinese territory. Since the FSW-2 vehicle configuration, the SRM was jettisoned after its firing in order to limit the mass necessary to be recovered later by parachute.102 Several FSW missions and the later evolution of the FSW spacecraft allowed its use as a microgravity platform. The version without film capsules (after the FSW programme) was called the SJ (Shi Jian). Experimental payload re-entry capability was maintained. 7. Chinese de-orbit SRMs China became the third nation to successfully recover its payload from space.91 This was achieved by the Fanhui Shi Weixing (FSW) photoreconnaissance spacecraft. Film capsules were de-orbited in a blunt re-entry vehicle of 1.5 m length, propelled by one SRM. Several versions of the FSW satellite were used in orbit between 1975 and 2005, while the first launch in 1974 was not successful due to the launch vehicle’s failure.92 Five series of FSW spacecraft were developed: FSW-0, FSW1, FSW-2, FSW-3 and FSW-4.93–95 They used SRMs produced by China Hexi Chemical & Mechanical Company. This included: FG-14, FG-23 (also designated as SpaB/68 shown in Fig. 2196) and FG-23 SRM variants.96 Several differences in the SRM designs included using different combustion chamber technology (steel or titanium) and different propellants (ranging from Carboxyl-Terminated-Polybutadiene (CTPB)based to HTPB-based) and propellant mass. All motors utilise internal burning grain with a total impulse exceeding 520 kNs and later versions had increased performance. More on the FSW and its SRMs can be found in Refs. 96–99. In particular, details on FSW missions and their outcomes are discussed in Ref. 100. Typical perigee altitude was between 170 and 200 km and the apogee altitude between 350 and 400 km. The orbit inclination was equal to 63°-65°.93 Importantly, Fig. 21 FG-23 (SpaB/68) SRM96. 8. Revisiting idea of using SRMs for de-orbiting spacecraft While multiple sources discuss the use of SRMs for SDM, the goal of this review is to collect current and historical developments worldwide in the field of SRMs for de-orbit and associated technologies in one paper. Solid propulsion for end-of-life disposal is considered, assuming use of a dedicated SRM system or an SRM cluster, implemented in a given spacecraft during its design and integration. While Active Debris Removal is also possible to be carried out by using solid propellant space-tugs,8,103,104 it is not considered widely for such applications due to the need of precise attitude and orbital control, while SRM provide a given total impulse. The topic of rendezvous with a non-cooperative, un-prepared, tumbling debris is a difficult field itself and is not discussed herein.8 Table 230,105–108 presents a summary of advantages and disadvantages of using solid propulsion for EoL disposal of spacecraft. This analysis shows that dedicated SRMs for EoL disposal may be a good solution for SDM. 9. Requirements for SRMs for modern end-of-life de-orbitation Key modern requirements for effective and safe use of SRM technology for de-orbitation include: (1) Limiting the inert mass of the system and minimising the necessary SRM size.27 Effect: use of high performance propellant and a high propellant mass fraction SRMs (efficient material selection - in particular low-regression-rate ablative insulation). (2) Limiting the thrust level to limit spacecraft accelerations during SRM firing – maximum accelerations depend on the design of the spacecraft, however, for typical large platforms of European Large Satellite Integrators the limit is 0.04 g if large appendages are used109 – this leads to relatively low thrust of solid rocket motors and very demanding long firing durations. However, if the SRM is used just for the final burn during direct controlled de-orbitation, some break-up is possible at altitudes below 600 km, where debris residence time is below 25 years. As for smaller spacecraft, without delicate appendages, relatively large thrust may be possible – accelerations above 1 g are acceptable for typical CubeSats and for many other small satellites without foldable solar panels and antennas. 140 Table 2 A. OKNINSKI Advantages and disadvantages of SRMs for EoL disposal.30,105–108 Advantages of SRMs for EoL disposal Disadvantages of SRMs for EoL disposal 1. Low propulsion system complexity 2. Good propellant storability (limited effect of space radiation,105 wide temperature range survival, resilience to thermal cycling) 3. Minimisation of the duration of the de-orbit manoeuvre, what limits the chance of collision with other satellites and debris, reduces the number of avoidance manoeuvres needed to be done by other satellites and limits the need of long-duration tracking etc.;106 moreover manoeuvre duration minimisation reduces the chance that batteries, tanks etc. may explode 4. Very high reliability107 1. Satellite platform system-level modifications may be required 2. May lead to extra mass if another propulsion system is also onboard the spacecraft 3. In case very long burn durations are needed, an end-burning SRM configuration must be used, what leads to lower propellant mass fractions and large shifts of the system’s centre of gravity 5. Very low power demand 6. No propellant preheating is required 7. All propellant on-board is used (no dribble volumes etc. exist) 8. Relatively low cost of SRMs 9. Ease of chopping and clustering of several SRMs, ability to slightly under- or overload propellant30 10. Full autonomy of the propulsion system during its firing 11. Relatively high performance, the highest density specific impulse among chemical propellants 12. No temptation to use propellant for mission duration extension (unlike if using liquid/hybrid propellant systems) 13. Near-to-constant thrust delivery capability (unlike in liquid propellant blowdown systems) 14. Does not require propellant management, no issues with sloshing etc. occur108 15. High propulsion system propellant mass fraction for SRMs with low-burn durations 16. Significant heritage considering relevant technologies 17. Existing industrial setups for producing large quantities of such systems 18. Does not require lengthy propellant loading procedures during spacecraft pre-flight-preparations 19. High thrust enables conducting controlled and semi-controlled deorbit manoeuvres 20. Lower quantity of large non-demisable components such as titanium-alloy propellant tanks in case of spacecraft architectures that do not have any propulsion system apart of the one used for deorbiting 21. Ease of passivation (no pressurized components are present after SRM firing, no need for further power supply) 22. Relatively little system level modification of spacecraft with no propulsion systems is needed to include a small SRM 23. Lower heat flux reaching system structure than in case of liquid propellant thrusters 24. Practically no lead time, easy initiation108 Effect: very low-burn-rate propellant and an end-burning configuration of the SRM (especially for spacecraft with appendages), use of clusters of SRMs in case of high total impulse requirements. (3) Limiting generation of debris occurring due to the presence of solid particles in the SRM exhaust (both combustion products, as well as bits of eroded insulation and other parts of the system).14 4. In case very long burn durations are needed, high slenderness of the SRM may be an issue for satellite mechanical configuration 5. At least two SRMs are needed for disposal manoeuvres requiring the delivery of two separate burns 6. There is no option to change the burn profile during mission execution 7. There may be need to develop a few sizes of SRMs30 8. More complex assembly integration and testing of satellites, minimal possibility for testing during integration and before launch108 9. Potential difficulty of on-ground performance validation and flight qualification 10. Lower Technology Readiness Level (due to the requirement to develop dedicated propellants and ignition systems, which limit generation of solid particles) 11. Potentially difficult spacecraft Attitude Control 12. Challenging development of Thrust Vector Control for small SRM systems 13. May include some small non-demisable components, depending on the technical approach used: nozzle throat, TVC flaps/vanes etc. 14. Requires management of pyrotechnical devices during mission finalisation Effect: use of non-metalised propellants, SRM design shall utilise a conditioning and ignition system that does not generate debris during firing initiation, while internal thermal insulation technology shall prevent injection of particles into the exhaust, especially during burn tail-off. (4) Ensuring storability and reliability of the motor.30 Effect: well-known propellant type with good aging properties, immune to radiation and with a wide operating temperature range shall be used. Solid rocket propulsion technology for de-orbiting spacecraft 141 (5) Ensuring passivation of the spacecraft by limiting energy reservoirs and ensuring their depletion at end-of-life.27 Effect: limited impact on the SRM due to its single-burn capability (however at system-level battery discharge and inhibiting pyrotechnical devices is needed and de-pressurization of the Thrust Vector Control is required if a pressurized medium is utilised). (6) Design for demise.27 Effect: Limiting use of refractory materials and titanium alloys in overall system design. More on this topic can be found in publications showing results from recent ESA projects.27,30,43 cepts.127 AP remains the baseline oxidizer due to its prevalence and novel oxidizers lack industrial-size facilities, what is linked to the evaluation of the economic impact regarding the potential necessary initial investment required for use of several novel compositions.128 In order to obtain high performance in terms of specific impulse, despite using no energetic additives and no metal powder or hydrates, very high AP loadings must be used. The size of AP particles are one of the key parameters effecting overall propellant burn rate.129–135 Compositions with bimodal136–138 and trimodal139 AP are advantageous for propellant packing and obtaining better combustion stability. However, very fine AP fractions must be limited not to increase burn rate. It is notable that well-tuned bimodal compositions can give lower burn rates than unimodal ones.136 There is, however, an upper limit on AP content - due to increasing the viscosity of the propellant slurry during casting, bubble contamination of grains occurs and the burn rate cannot be controlled. In practice the maximum AP mass fraction for bimodal AP is about 86%.140 For relatively coarse AP, which allows limiting the burn rate, the maximum AP mass fraction is even lower and it furtherly decreases in case of the necessity to include burn rate augmentation compounds. 10. Propellant selection One of the keys issues is to define the most promising propellant for SRMs for SDM. It is commonly assumed that it should be a composite propellant due to in-space heritage of such systems.28 Double base propellants are less attractive due to their lower specific impulse and larger challenges considering including them on-board spacecraft platforms, due to their higher sensitivity (Class 1.1. transportation hazard, which means that they can transfer from deflagration to detonation, unlike typical Class 1.3. composite propellants). Despite their shortcomings, use of double base propellants for EoL disposal is discussed in Ref. 110. However, composite propellants allow obtaining significantly higher specific impulse (and density specific impulse) and a very wide range of burn rates (from over 50 mm/s to single mm/s). Therefore composite propellants shall be discussed within this paper. 10.1. Oxidizer and energetic material selection The preferred oxidizer for dedicated composite propellants is ammonium perchlorate, due to its heritage, good performance and storability.111,112 ADN propellants deliver high specific impulse,113–115 but have very high burn rates,116 what eliminates their use in most SDM applications, despite of utilisation of ADN-based propellants in some upper stage SRMs of Soviet and Russian vehicles. Alternative oxidizers, such as HNF are not characterised well and they have little heritage, even regarding on-ground applications.112,117 HNF is considered hazardous and most research involving its use has been stopped. Several other propellants using novel oxidizers are at the laboratory stage of development.118 Some propellants are based on CL-20 (Hexanitrohexaazaisowurtzitane, HNIW), which is a missile-proven technology,119 but its costs are high since most commercially manufactured batches are small. Other explosives as 1,3,5,7-tetranitro-1,3,5,7-tetraazacyclooc tane (High Melting Explosive, HMX) and 1,3,5-trinitrohexahy dro-sym-triazine (Research Department Explosive, RDX) may also be used.120,121 Although, while contributing up to 10% of the propellant mass they do not change the propellant safety classification, use of explosives is avoided for in-space propulsion. Other well-known oxidizers have limited use due to lack of performance. For example ammonium nitrate could be an interesting oxidizer allowing to limit burn rates, 122,123 but its performance and issues with storability make it less attractive,124 although its thermal stabilisation is possible.125,126 No information in open literature was found regarding use of non-AP propellants for SDM apart from preliminary con- 10.2. Fuel and binder system Most importantly, to limit condensable combustion products, metal powders shall not be used in modern SRM for SDM. This is discussed in the following paragraphs of this paper. Similarly, several other compounds commonly used for instability suppression and damping, due to their solid phase, should be limited. As for binder systems, they have impact on propellant storability and mechanical properties. Expected mechanical properties should be optimized for end-burning grains, since this geometry shall be dominant for most spacecraft. Typical propellants based on HTPB binders are promising141 and storability data is available regarding AP/HTPB propellant shelf life.142 However new developments do not have to be limited to this binder system. Several alternative ones may actually enable a decrease of the propellant burn rate.143–145 Typically hydrocarbon burn rates decrease for compounds with higher numbers of as in a molecule.146 Higher performance binders, such as Glycidyl Azide Polymer (GAP), may also be of interest for future developments,111,147 as well as lower burn rate ones, including 3,3-bis(azidomethyl)oxetane (BAMO).130,148 This also considers use of advanced binders with explosives.130,149 More on modern energetic binders can be found in Refs. 45,150 . However, in-space use of explosive materials is expected not to be widely considered by satellite integrators, even in case of specific impulse gains. 10.3. Burn rate suppressants While most rocket application require high propellant burn rates, several sources describe various additives for standard AP-based composite propellants, enabling obtaining lowburn-rates, which are required for efficient deorbiting.141,145,151–154 Compounds enabling decreasing propellant burn rates are called suppressants, moderators or inhibitors. A detailed review of such compounds for SDM has 142 A. OKNINSKI been conducted in the recent project ‘‘Pre-Qualification of Aluminium-Free Solid Propellant” of ESA, where over 60 burn rate suppressants have been listed.43,155 Among the most promising burn rate suppressant is oxamide (C2H4N2O2), 156,157 which is one of the most commonly used burn rate suppressants in missiles. Oxamide is also used as an additive to low-regression liners and thermal insulation materials.158 Other effective propellant additives for burn rate moderation include lithium fluoride,159 titanium oxide,160 melamine161 and several ammonium salts.162,163 Particular impact of the selected compound depends on the moderator concentration, surface area and aggregation, as in case of catalysts.146 Different mechanism of decreasing burn rates are described in Refs. 145,164 . These include cooling the combustion process and propellant heating, as well as directly affecting chemical kinetics of AP decomposition. More on AP decomposition can be found in Refs. 161,165–168. However, some suppressants influence not only AP thermal decomposition, but also binder system decomposition.169–171 More burn rate suppressants can be found in Ref. 145, where 117 compounds, with reported research concerning achieving low burn rates, are listed. Other references include Refs. 172–177. 11. Modern developments of SRMs for end-of-life spacecraft disposal In Europe several studies and developments concerning the use of SRM for de-orbitation have been on-going for a number of years. The SPADES (Solid Propellant Autonomous DE-orbit System) concept developed at ESA is the workhorse of development in this area in Europe. Previous research was published since the beginning of the 19900 s by representatives of Schonenborg Space Engineering B.V. and Schöyer Consultancy B.V. Their concept is based on the idea of including SRMs on board of S/C at their design and integration phase, ensuring an autonomous, highly reliable, storable propulsion system providing the source for the delta-V needed at S/C end of life.11,109 In 2013 Dutch entities: Innovative Solutions in Space B.V, Aerospace Propulsion Products B.V. and Netherlands Organisation for Applied Scientific Research (TNO) proposed an SRM for NanoSat de-orbitation. A Nanosatellite Kick Stage (NKS) was planned to de-orbit 3-unit CubeSat class satellites in a predictable manner from a 1000 km orbit.178 With a total impulse of 600 Ns and approximately 180 N of thrust, a 3.9 kg CubeSat would find itself under 5g acceleration. Ref. 178 presents pictures from the prototype ground firing. The project never advanced to higher Technology Readiness Levels (TRLs). Outside Europe, also in 2013, the American Ad Astra Rocket Company proposed a Low Earth Orbit Large Debris Removal system, which would enable de-orbitation of inter alia spent Zenit rocket upper stages. An active space tug propelled by advanced VASIMR and solar electric propulsion systems would enable the attachment of SRMs to large objects being already in orbit. Ad Astra’s idea assumes igniting an SRM at an altitude of 400 km, enabling controlled re-entry.179 In 2016 the Los Alamos National Laboratory published research on an innovative propulsion system that could serve as a kick-stage for small satellites, as well as it could be used for de-orbiting application.180 The original SRM configuration Fig. 22 Pacific Scientific’s SRM and an example SRM cluster for in-space applications181. assumed using a separate fuel grain and a separate oxidizer grain. A newer concept, presented in 2017 by the Pacific Scientific Energetic Materials Company,181 is a configuration dedicated Fig. 23 Pacific Scientific’s PACSCISAT and its MAPS module demonstrator183. Solid rocket propulsion technology for de-orbiting spacecraft 143 to small satellites utilising dozens of small SRM in a cluster, which would be implemented as part of the S/C. It is shown in Fig. 22181. The system allows numerous in-orbit manoeuvres including final de-orbitation. While the presented version of the system consists of over 170 SRMs, the manufacturer underlines ability to maintain very high overall reliability and as described in Pacific Scientific Energetic Materials Company’s patent, up to 1000 SRMs can be effectively integrated in one system.182 MAPS heritage includes technology development for the Exo Kill Vehicle where extremely precise sequencing of SRMs was achieved.183 The company declares the use of a clean-burning propellant with a specific impulse of 210 s in vacuum, what is slightly below state-of-the-art hydrazine monopropellant thrusters. The use of MAPS has been demonstrated via orbit raising of the 3-unit PACSCISAT satellite in 2017, which included four small SRMs - two firings of two different motor pairs was carried out.183 The satellite’s mechanical configuration and the SRM assembly are shown in Fig. 23183. The company declares that the system is compatible with many other small satellites and has a lifetime of over 10 years with three independent inhibits against unwanted motor firing. MAPS is capable of delivering a delta-V of over 50 m/s for a 1-unit satellite.184 Further information on the propulsion system can be found in Refs. 183,185. Another example of use of SRMs for SDM is provided by D-Orbit from Italy. The company declares the will to sell autonomous de-orbit systems. However, it is not directly involved in developing the SRMs themselves.186 The company cooperates with Bayern Chemie, from Germany, regarding the propellant and SRM to be used. Initial work of D-Orbit and Bayern Chemie on the SRM assumed a propellant with SiO2 inclusions for burn stability. The cooperation led to the DSAT 3 Unit CubeSat.186,187 The solid rocket motor had a burn time of 3.2 s and was to deliver 375 N of thrust and 836 Ns of total impulse. The SRM total mass was 0.9 kg with a 0.33 propellant mass fraction and its envelope slightly exceeded the 1unit standard. It is shown in Fig. 24108. While a case-bonded propellant grain would allow obtaining a better propellant mass fraction, a cartridge grain enabled assembling the SRM at the launch complex. The maximum expected operating pres- sure was 7 MPa, while the nominal value was 5 MPa and a specific impulse of 266 s was to be achieved. A nozzle area ratio of 20 is quoted. The 2018 in-orbit demonstration was carried out, however D-Orbit elevated the orbit instead of decreasing it.187,188 Early SRM system versions shown to the public did not meet ESA maximum acceleration requirements, however the final product is to be also useful for satellites with appendages. The Bayern Chemie propellant utilised is from the RESI (REduced SIgnature composite propellant) family. The company states that one of the RESI propellants was aged for 10.5 years at 62 °C, what is equivalent to over 100 years of storage in room temperature. The only property degradation issue concerned strain-capability at low temperatures. However, an official shelf life between 12.5 and 16 years was stated. As for the specific RESI propellant used in D-SAT, it has a burn rate of 12.5 mm/s at 10 MPa and a pressure exponent of 0.43. Its operational temperature range was 30 °C to +71 °C (while qualification took place at 34 °C). Irradiation tests were done on a propellant simulant with no oxidiser. More data on RESI propellants is provided in Ref. 108. In early 2016 the European Commission began the TeSeR (Technology for Self-Removal of Spacecraft) project with Airbus Defence and Space being the leader. The goal of the project was to develop on-ground prototypes of spacecraft EoL disposal systems. Among three different removal subsystems one was based on solid propulsion.189 However only an inert (excluding real propellant) configuration was built 190 and the project finished in 2019. Work allowed designing the system including: the SRM with a safe-and-arm device and ignition control electronics. Basing on the outcome D-Orbit included various versions of the D3 (De-orbit Decommissioning Device) subsystem in its products line.191 A newer product of D-Orbit under development is the Fenix small propulsion module for CubeSats (20 mm of diameter and under 100 mm of one SRM). The baseline configuration uses four motors of this type, situated along the vertical edges of a 1-unit CubeSat frame.192 Other developments in Europe, following the increasing impact of the ESA Clean Space,193 were stimulated by small contracts awarded by ESA in 2016 within the ‘‘CleanSat: Technology assessment and Concurrent engineering in support of LEO platform evolutions” project.194 The multidisciplinary study was supported by European Large Satellite Integrators. Numerous SDM technology building blocks were assessed using the ESA concurrent engineering environment,27,195 including use of solid propulsion for de-orbit. Two concepts were dedicated to SRMs (by Institute of Aviation from Poland and Nammo from Norway) and two were dedicated to Autonomous De-orbit Systems, which may use SRMs (by D-Orbit from Italy and GMV from Spain).27 Fig. 25,196 presents the concept of Nammo. Meanwhile the initial phase of ESAsupervised TVC development for SRM for SDM was ongoing and was done by a Swiss-Italian consortium combining Almatech, D-Orbit and Alta Space. A small study regarding use of SRMs for nanosats was also carried out in Norway, funded by the Norwegian Space Agency. After the ‘‘CleanSat: Technology assessment and Concurrent engineering in support of LEO platform evolutions” ESA initiated a more detailed engineering project ‘‘PreQualification of Aluminium-Free Solid Propellant”, which was completed in Poland and allowed obtaining unprecedented results including confirming radiation-resistance and Fig. 24 D-SAT SRM108. 144 A. OKNINSKI Fig. 25 Nammo’s SRM for small-sat de-orbiting (left) and example small-sat visualization (right)196. Fig. 26 Polish SRM for de-orbit (left) and subscale SRM atmospheric firing (right)105. 12. Thrust vector control of SRMs for EoL de-orbit Fig. 27 ESA-supported SRM design as of 2020197. storability of high performance low-burn-rate solid propellants.105 The propellant based on AP, HTPB and oxamide completed pre-qualification and obtained an ESA TRL of 6. The continuation is ongoing with further development, via a consecutive contract in ESA General Support Technology Programme (GSTP), titled ”Solid Propellant Engineering Model Development”, where the SRM technology is going to be increased to TRL = 5. Further SRM qualification and flight model development is planned. An in-orbit-demonstration would allow increasing the community’s awareness of the technology’s capabilities and prove technology readiness. Fig. 26,105 presents the Polish SRM design and successful ground firing of prototype using the newly developed dedicated propellant and Fig. 27,197 presents the design optimised as of 2020 for 1.5 t satellites, All efforts are done in-line with ESA and European Large Satellite Intergrators’ requirements in mind. D-Orbit’s issue during its in-orbit demonstration of its SRM prototype was due to an attitude control problem and lack of TVC.187 Thrust vector control has been identified by European primes as the key system-level challenge to be solved before introducing dedicated SRMs for EoL disposal to a wider range of spacecraft.27 While an alternative is to use spin stabilisation of the satellite during the final burn, this may require spin-up thrusters and is not possible for each spacecraft due to i.e. appendages. In case of Iridium satellites, 109 mentions that a maximum allowable angular acceleration of 0.42 rad/s2 and an angular velocity of 0.7 rad/s is expected to ensure spin-stabilisation of the satellite. Requisite spin-up may be achieved by using small SRMs if no thrusters are onboard or if early passivation of the main liquid propulsion system is needed. Spin-stabilisation can be also achieved by adequate geometry of the exhaust nozzle. This approach may be attractive for nanosatellites, where minimal system complexity is needed. However, caution is needed regarding nutation instability, also called the PAM-D coning anomaly (named due to its discovery during flights of the American Payload Assist Module using a STAR-48 SRM).198 This instability may occur after motor ignition and is visible via a lateral angular wobble, occurring despite gyroscopic effects, as shown in Fig. 28198. This wobble may remain post the SRM firing in case of spin stabilisation. Naturally its occurrence is dependent on the mass distribution and mass change during propellant burn out. A recent study 198 provides a major outcome showing that use of end-burning solid rocket motors allows gradual vehicle stabilization, unlike in case of radial-burning propel- Solid rocket propulsion technology for de-orbiting spacecraft Fig. 28 Nutation instability of spin-stabilised vehicles using SRM systems198. lant grains. Therefore, in case of typically envisaged SRMs for de-orbit, spin stabilisation shall be considered and may not require additional nutation control subsystems.199 In case spin-stabilisation is not possible and the existing attitude control system is not able to provide adequate torques to counteract aerodynamic effects,33 which grow with decreasing altitudes, TVC shall be necessary. The ESA SPADES study mentions two technical solutions, shown in Fig. 2930. In case of Pacific Scientific Energetic Materials Company’s MAPS, the array of small SRMs allows for firings of adequate charges in order to conduct planned manoeuvres. A combination of using reaction wheels and SRM firings is utilised. Ref. 185 states that this way all necessary orbital adjustments can be achieved, including effective attitude control and higher delta-V manoeuvres. Later ESA projects led to a larger number of concepts from industry including Almatech, Nammo and Warsaw Institute of Aviation. Fig. 3027 presents two SRM TVC configurations presented during the ESA ‘‘CleanSat: Technology assessment and Concurrent engineering in support of LEO platform evolutions” project. Gimballing of the nozzle downstream of the throat (supersonic split-line technology), gimballing of the whole nozzle, as well as gimballing of the whole SRM were considered. Moreover, a trade-off of a number of further solutions was conducted at Lukasiewicz Research Network - Institute of Fig. 29 145 Aviation (Fig. 3141). Some concepts included components which could also be used for closing the SRM nozzle outlet, thus enabling SRM conditioning with a neutral gas without the need of introducing a nozzle bladder (which is problematic in terms of opening without releasing additional debris). In the trade-off mentioned two TVC solutions were selected for further analyses – the gimballed one from Fig. 30 (left) and one using external nozzle flaps from Fig. 31 (bottom right). This topic has been also covered in the ESA ‘‘Pre-Qualification of Aluminium-Free Solid Propellant”, where initial system-level aspects have been analysed. The problem of TVC and spacecraft dynamic behavior has been studied in Ref. 200. This also includes analysis of TVC use in case of firing two SRMs at one time, while due to uneven satellite heating one motor may have a higher propellant burn rate. An ESA activity concerning dedicated TVC has been completed by a consortium led by Almatech.201 A wide range of technical solutions for TVC has been considered. Design activities led to a new patent application considering a frictionless flex-gimbal solution.202 As in one of the Polish concepts, the whole SRM is to be gimballed, what is an unprecedented approach for SRMs. Almatech’s solution allows for a nonlubricated design and has been shortlisted by its consortium. The design is shown in Fig. 32202. Importantly, earlier work assumed developing TVC with nozzle exit vanes, as successfully used in several missiles worldwide. However, issues with testing were acknowledged and no sufficiently representative cold-flow test method was identified.201 This is due to a very high envisaged expansion ratio of the SRM nozzle. Use of gas cold-flows would lead to having condensation at the nozzle exit and high-mass flow tests lead to very demanding vacuum facility requirements. With vanes located at the SRM nozzle exit, it is very difficult to provide representative testing conditions. Hot firings of SRMs with vanes could be carried out in a high-performance vacuum facility, however vacuum testing of SRM is very rare and only several adequate facilities exist worldwide. Recent ESA advancements with other building blocks of the ultimate de-orbit system, such as the dedicated propellant and long-burn-duration SRM technology, show that there is need for rapid TRL increase of TVC technology for SRMs. Naturally, the main driver is commercial interest of satellite integrators due to legal requirements concerning SDM. In late 2020, a new ESA activity titled ‘‘Solid Propellant Rocket Motor Thrust Deflection System” has been initiated in Poland. This contract, being the forth ESA activity in Poland within ESA SPADES concepts for thrust vector control systems: with deflecting nozzles (left) and vanes in nozzle exhaust (right)30. 146 A. OKNINSKI (a) Whole SRM gimballing proposed by Warsaw Institute of Aviation Fig. 30 Fig. 31 (b) SRM nozzle gimballing proposed by Nammo ESA CleanSat study TVC concepts using gimballing27. TVC concepts for preliminary trade-off at Warsaw Institute of Aviation41. Fig. 32 Frictionless Flex-Gimbal design202. this topic is to deliver TVC technology to TRL = 5+. Latest Polish, Norwegian, Italian and Swiss experience and feedback from European primes show that a robust, low-cost TVC solution is needed, which would allow minimisation of spacecraft architecture modifications. While gimballing the whole SRM may lead to increased system envelopes, use of components in the SRM outflow, such as flaps or vanes, is also difficult due to challenges with representative vacuum testing conditions. Different providers may decide to settle upon different TVC technologies. Regardless of final technical trade-off results, in-orbit demonstrations shall be beneficial for the development, including development costs, and may be required for some of the solutions due to the mentioned issues with full on-ground validation. 13. Challenges in development of modern SRM systems for spacecraft de-orbit Typical design procedures for SRMs can be found in Refs.28,146,203,204. However, some SDM requirements lead to specific technical difficulties. One of the first trade-offs is the propellant type. Combining performance without using metal additives and low-burn rate is a major challenge itself. On the other hand, propellants with no aluminum do not exhibit Solid rocket propulsion technology for de-orbiting spacecraft Table 3 147 Technical maturity of key technologies. Technology Present status Further work needed Solid propellant meeting SDM requirements Existing heritage regarding nonmetalised solid propellants Existing heritage regarding low burn rate propellants Moderate-performance propellant qualified by Pacific Scientific and used in orbit (vacuum specific impulse of 210 s) ESA prequalified (TRL = 6) dedicated low burn rate AP/HTPB propellant (expected vacuum specific impulse exceeding 270 s) Heritage from missile systems, especially from sustainer SRMs High performance storable nonmetalised low burn rate propellant qualification and in-orbit demonstration Thermal insulation, long burn duration endburning SRMs Ignition chain and flame transfer between motors Thrust vector control System: Attitude and Orbit Control System (AOCS), power etc. Existing heritage from military systems, including safe and arm devices, through bulkhead initiators and shielded mild detonating cords Existing heritage from missile systems, multiple flightproven TVC technical solutions Existing satellite subsystems of various size and capabilities loss of performance due to aging (no Al2O3 generation occurs during aging). Lack of Al2O3 in the combustion products decreases mechanical erosion of system components such as: the nozzle, including the throat region, and the TVC subsystem. However, high-AP-loading leads to intense oxidation and chemical erosion within the SRM. A non-eroding nozzle insert is needed for high performance, while refractory and other non-demisable materials should have limited use in motors used for spacecraft EoL disposal. Long burn durations cause increased heat losses, which decrease overall system performance. Long burn durations also require using endburning configurations with significant mass of thermal insulation, what decreases overall system delta-V capabilities. Very favourable (in comparison to liquid propulsion) system dry mass estimations from Ref. 30 may be slightly optimistic if long burn durations are required. High system-level performance requires maximising the propellant mass fraction and advanced ablative insulations must be used, possibly with variable thickness along the SRM axis. Historical developments show the possibility of grain coning throughout the burn and that difficulties in reaching the desired thrust characteristic may occur. Low chamber pressure is expected to be beneficial, as in most in-orbit propulsion systems, in terms of maintaining low structural mass of the SRM and in order to limit insulation regression and the propellant burn rate. Very thin combustion chamber wall thickness may not be possible due to manufacturing challenges for high elongation motors and structural oversizing may need to be done, also in order to deal with machining, integration and handling loads. Low chamber pressure may also be a disadvantage since each propellant combination has its own low pressure limit of combustion. For some formulations low pressure ignition and steady combustion may be a challenge.205 Lack of solid particles in the combustion products may lead to issues with SRM burn stabil- Further development of thermal insulation and nozzle assembly generating minimum solid particles, qualification of components for orbital use Further development of ignition chain generating minimum solid particles, qualification of components for orbital use, definition of reliable SRM clustering solutions Optimisation for spacecraft application, development from its present status (TRL = 2 regarding de-orbit) up to in orbit demonstration Integration of existing building blocks, optimisation of control between AOCS and the TVC subsystem. Amount of work will significantly depend on the required degree of autonomy of SRM de-orbit systems ity.206 It is however possible to have stable combustion using nonmetalised propellants.105,108 While negligible amounts of solid and condensable combustion products lead to acceptable ultra-fine particles in the exhaust, attention must also be given to other motor components. A dedicated, fully combustible, thermal insulation shall be used and the nozzle burst-disc must not generate additional debris. Similar work must be also performed on optimisation of igniter subsystems in order to minimise solid particle generation. The ESA IPOL requirement of debris below 1 mm of size is valid (however combustion products are to be two-orders of magnitude smaller). Another challenge is connected to SRM in-orbit storability. Long-duration radiation exposure must not pose a threat not only to the propellant itself,207 but also to SRM components such as sealings and pyrotechnics.208,209 Recent data on the impact of space radiation on solid propellants has been presented by Nowakowski in Ref. 105 and Caffrey et al. in Ref. 210. While, the results show that radiation shall not be an issue for most cases, the combustion chamber wall may be treated as potential shielding if needed. Thermal cycling, especially significant in terms of LEO applications, must also be considered. A challenge itself is SRM testing and qualification. A limited number of facilities worldwide enable vacuum testing of SRMs. While qualification does not have to require vacuum testing, some TVC systems may need to be tested in vacuum chambers, depending on the physical phenomena utilised. Attitude control of spacecraft is a complex task and in case of introducing a solid propulsion system, which has relatively high thrust in comparison to other technical solutions, applicable Attitude Control System (ACS) margins or dedicated TVC are needed. Naturally, for many spacecraft spin stabilization is also possible, as has been historically done.69 While several challenges occurring during the development of dedicated SRM systems for de-orbit were shown herein, 148 A. OKNINSKI autonomy, by including power supply, control, a simple onboard computer etc. in de-orbit kits, regardless of the systems already present on the satellite platform. This would allow nearly full spacecraft passivation, with only the de-orbit kit remaining active during the de-orbit manoeuvre. 15. Conclusions Fig. 33 The 15D161 SRM213. available modern SRM technologies allow meeting requirements. Example solutions were discussed by Schonenborg and Schoyer11,109 and Nowakowski et al.43,155 and several on-going research and development activities worldwide address key issues regarding effective use of SRMs for EoL disposal. 14. Technical maturity In order to summarize the status of SRM development for propulsive EoL spacecraft disposal, a brief review on the technical status of key technologies has been done. It is briefly encapsulated in Table 3. While SRM technology is well established, new requirements concerning system performance and SDM issues lead to necessary further development work in this field. SRMs of relatively similar design (end burning grain, very long firing duration) are present in several sustainer rocket motors used in i.e. air-to-air missiles. Larger SRMs of this type were utilised in ICBMs for propelling nuclear warhead reentry vehicles. Systems of Yuzhnoye used nonmetalised propellants in case-bonded grain configurations with SRM burn durations up to 500 s.211,212 Fig. 33,213 presents Yuzhnoye’s 15D161 rocket motor used in the 15A14 (S-18) ICBM. Another historical example is the American Propelled Decoy motor called the Five-minute Rocket Motor, which had a burn duration exceeding 300 s (although the low burn rate baseline propellant used aluminum powder).214 More recent developments include end burning SRMs with low burn rate AP/ HTPB propellants for drone application.215 Numerous development activities could be proposed regarding even further technology development than listed in Table 3. Next generation systems could include use of nonAP/HTPB solid propellants. Moreover, some of the largest drawbacks of conventional SRMs, thus no restart-ability and no thrust termination capability, could be tackled. Appropriate technologies for small and medium size SRMs exist216 and are implemented into military designs. In case of dedicated SRMs for de-orbit, at this stage of development the goal is to have them demise during spacecraft re-entry. If payload ground recovery would be the goal, SRM recovery and reusability after refurbishing the thermal insulation and repeated propellant casting could be the long term goal. This however, is not considered within this review due to multiple challenges to be faced before this future phase. Other examples of further work include developing de-orbit kits with full Use of solid rocket motors for SDM is considered one of the most propitious solutions among high-thrust propulsive SDM methods. While the first use of solid propellants in space and for de-orbit applications goes back to the very beginning of the space-age, their utilisation was continued throughout the decades till the 21st century, mainly on-board American, Soviet and Russian spacecraft. Most applications since the late 19500 s were dedicated to recover payloads (manned and unmanned capsules) and the peak use of SRM for de-orbit occurred in the mid-1980’s. In the 1990’s Schonenborg and Schöyer identified the potential of SRMs for Space Debris Mitigation and this was one of the catalysts for the development of the concept - after 2012 global interest in commercial applications in this field has been identified. The following conclusions regarding use of SRM technology for EoL propulsive disposal of spacecraft can be drawn: (1) Initial applications of SRMs for EoL disposal occurred due to re-entry needs, not due to SDM awareness. (2) Despite the fact that Soviet and Russian applications were a major part of registered in-space uses of SRMs, their impact on the current space debris environment is minimal due to their use on very low orbits. More significant impact on the number of orbital debris is due to use of SRMs as kick-stages and upper-stage propulsion for launch vehicles. (3) Despite significant heritage in SRM retro-firings, SRMs for de-orbit have been in their nascent stages until the early years of the 21st century, if modern SDM requirements are considered. This is due to the extensive, up-todate, use of solid propellants with aluminium powder, generating significant amounts of Al2O3 and other SRM-related debris. Typical small SRMs do not ensure long burn durations and limiting acceleration levels for spacecraft with appendages. The use of small SRMs with burn durations in the order of minutes has been historically very limited. The only relevant applications known are Soviet SRMs used for propelling nuclear warheads and several experimental designs, hardly used operationally. Naturally, relevant technologies are also present in sustainer SRMs used in missiles. However, burn durations above 60 s are rare and combining clusters of such motors is unprecedented. As for propellants, dedicated solid propellants for de-orbit have not been available until recently. Modern advances led to the development of low burn rate propellants with high performance. Most technically relevant solutions are unmetalised composite propellants used for missile sustainer propulsion. Both case-bonded and free-standing grain technologies can be utilised and technically justified. Supporting cases, proving that the technical maturity is either present or can be achieved in the next few years has been shown. Solid rocket propulsion technology for de-orbiting spacecraft 149 (4) While up-to-date progress on TVC for SRMs for deorbiting spacecraft is not mature yet, major advances are expected in the 20200 s, leading to operational systems. Heritage is also largely-based on missile technologies. (5) Since heritage of SRMs for de-orbit is relevant for very short-duration reconnaissance and human spaceflight missions, thus little data on long-term in-space storability is available in open literature. However, recent advances show good resistance to radiation and no show stoppers regarding use of AP/HTPB propellants in deorbit SRMs have been identified. In fact, dedicated nonmetalised AP/HTPB propellants are considered also safe regarding potential compliance with possible future international regulations (both in terms of SDM and limiting use of toxic propellants). (6) In the past few years several European companies initiated developments of solid rocket motors for de-orbit with the goal of introducing them to satellite platforms. However up to date no existing solutions meet requirements concerning acceleration limits (0.04g for spacecraft with deployable appendages) given by ESA and European Large Satellite Integrators. It can be seen that a reliable, high performance and low-acceleration deorbitation motor has yet to be developed. The creation of the ESA Clean Space initiative led to work of several entities in this field. (7) While numerous advantages of SRM systems have been identified, challenges connected with the development and use of solid propulsion for SDM have been listed. Key challenges include attitude control during the deorbit manoeuvre and reaching high propellant mass fractions for very long SRM burn durations. (8) While low-acceleration SRM systems, and in some cases SRM clusters, are needed for spacecraft with large appendages, small satellites, especially nanosatellites, may enable conducting de-orbit manoeuvres with accelerations even exceeding 1g, thus significantly reducing SRM development challenges. Such systems will have considerable higher propellant mass fractions than systems of the same size, which have long burn durations. Therefore, it may be expected that small satellite applications of SRM de-orbit technology will serve as an important direction of de-orbit technology growth, next to developments for larger platforms within ESA and other international programmes. (9) Currently three countries worldwide are leading major SRM developments for SDM. This includes commercial initiatives (system-level work in Italy and in the United States) and ESA projects (SRM development projects in Poland). Consecutive in-orbit demonstrations of relevant technologies are expected between 2022 and 2027. The outlook on further SRM developments and utilisation for SDM looks promising. No showstoppers have been identified. (10) The key step regarding wide SRM technology application for de-orbitt is matching satellite integrators needs and industry flexibility is essential to adapt current spacecraft platforms’ mechanical configurations to integrate SRM within them. Use of SRM for uncontrolled, semi-controlled and controlled de-orbit is possible. They can be used as fully autonomous modules or in combination with other on-board propulsion systems. The NewSpace market is still shaping, thus the future of SRM for de-orbit will depend on the final commercial appeal of the technology. (11) Follow-up work should explore the impact of recent and expected advances in liquid and hybrid propulsion on the de-orbit propulsion system trade-off. This should also include an updated cost vs. reward analysis. The range of missions where high thrust manoeuvres are essential and will not be replaced by electric propulsion firings should be defined to allow market size estimation. Declaration of Competing Interest The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper. Acknowledgements This work is based on results of activities led by the Lukasiewicz Research Network - Institute of Aviation. It was prepared within the ‘‘Space Research Development” project. The project is financed by the Polish National Agency for Academic Exchange (No. PPI/APM/2018/1/00032/U/001). Work presented from projects of ESA includes work done during preliminary phases of ASPro (Pre-Qualification of Aluminium-Free Solid Propellant) and SPRODEM (Solid Propellant De-orbit Motor Engineering Model Development) projects funded within the General Support Technology Programme (GSTP). The author would like to thank all of the members of the Team who committed to the development of SDM technology and would also like to show his deepest gratitude to ESA Clean Space and all ESA technical and contractual Officers involved. Moreover, cooperation with various entities working in the field of Space Debris Mitigation, as well as individuals collecting space-related data is highly appreciated. Fruitful cooperation allowed sharing unique figures and data for the purpose of this review. References 1. Bonnal C. A brief historical overview of space debris mitigation rules. Clean space industrial days, 2016. 2. Kato A. Comparison of national space debris mitigation standards. Adv Space Res 2001;28(9):1447–56. 3. Petro AJ. Techniques for orbital debris control. J Spacecr Rockets 1992;29(2):260–3. 4. Bonnal C, Alby F. Measures to reduce the growth or decrease the space debris population. Acta Astronaut 2000;47(2–9):699–706. 5. Bonnal C. Requirements for debris mitigation. IISL-ECSL space law symposium, 2014. 6. Tuozzi A. The Inter-Agency Space Debris Coordination Committee (IADC): An overview of IADC’s annual activities. International committee on global navigation satellite systems (ICG) annual meeting, 2018. 7. Liou JC, Johnson NL. Risks in space from orbiting debris. Science 2006;311(5759):340–1. 8. Bonnal C, Ruault JM, Desjean MC. Active debris removal: Recent progress and current trends. Acta Astronaut 2013;85:51–60. 9. Mark CP, Kamath S. Review of active space debris removal methods. Space Policy 2019;47:194–206. 150 10. Shan MH, Guo J, Gill E. Review and comparison of active space debris capturing and removal methods. Prog Aerosp Sci 2016;80:18–32. 11. Schonenborg RAC, Schoyer HFR. Solid propulsion de-orbiting and re-orbiting. European conference on space debris, 2009. 12. Horstmann A, Kebschull C, Müller S, et al. Survey of the current activities in the field of modeling the space de-bris environment at TU Braunschweig. Aerospace 2018;5(2):37. 13. Innocenti L. Clean space—An overview. ESA clean space industrial days, 2016. 14. Innocenti L, Soares T, Delaval J, et al. ESA clean space initiative. Proceedings of the 6th IAASS conference, 2013. 15. ISO. Space systems—Space debris mitigation requirements. 2019. Report No.: ISO 24113. 16. Kawashima R, McKnight D. A handbook for post-mission disposal of satellites less than 100 kg. Proceedings of the 8th space debris workshop, 2019. 17. Klinkrad H, Fritsche B, Lips T, et al. Re-entry prediction and onground risk estimation.Space debris.. Berlin: Springer; 2006. p. 241–88. 18. Bonnal C. Space debris mitigation & remediation: A general update. Proceedings of the 8th space debris workshop, 2019. 19. Bonnal C, McKnight D, Phipps C, et al. Just in time collision avoidance – A review. Acta Astronaut 2020;170:637–51. 20. Bonnal C, Francillout L, Moury M, et al. CNES technical considerations on space traffic management. Acta Astronaut 2020;167:296–301. 21. Hilton S, Sabatini R, Gardi A, et al. Space traffic management: towards safe and unsegregated space transport operations. Prog Aerosp Sci 2019;105:98–125. 22. Jarry A, Bonnal C, Dupont C, et al. SRM plume: A candidate as space debris braking system for Just-In-Time Collision avoidance maneuver. Acta Astronaut 2019;158:185–97. 23. European Space Agency. Mitigating space debris generation [Internet]. Available from: https://www.esa.int/Our_Activities/ Space_Safety/Space_Debris/Mitigating_space_debris_generation. 24. Wu ZN, Hu RF, Qu X, et al. Space debris reentry analysis methods and tools. Chin J Aeronaut 2011;24(4):387–95. 25. United Nations. Compendium of space debris mitigation standards adopted. New York: United Nations; 2019. Report No.: A/ AC.105/C.2/2019/CRP.14. 26. Sánchez-Arriaga G, Sanmartı́n JR, Lorenzini EC. Comparison of technologies for deorbiting spacecraft from low-earth-orbit at end of mission. Acta Astronaut 2017;138:536–42. 27. European Space Agency. European Space Agency CleanSat concurrent engineering final presentation (public version). 2017. 28. Sutton GP, Biblarz O. Rocket propulsion elements. Hoboken: John Wiley & Sons; 2016. 29. Burkhardt H, Sippel M, Krülle G, et al. Evaluation of propulsion systems for satellite end-of-life de-orbiting. Reston: AIAA; 2002. Report No.: AIAA-2002-4208. 30. European Space Agency. ESA SPADES—Assessment of solid propellant deorbit module CDF report. 2013. 31. DeLuca LT, Bernelli F, Maggi F, et al. Active space debris removal by a hybrid propulsion module. Acta Astronaut 2013;91:20–33. 32. Tadini P. Hybrid rocket propulsion for active removal of large abandoned objects[dissertation]. Milano: Politechnico di Milano; 2014. 33. de Bruijn FJ, Bewick C, Luebke-Ossenbeck B, et al. Propellantefficient method for controlled deorbit of Leo satellites. International astronautical congress, 2013. 34. Janovsky R. End-of-life de-orbiting strategies for satellites. Reston: AIAA; 2003. Report No.: IAC-03-IAA.5.4.05. 35. Maggi F, Paravan C, Benetti M, et al. Monte Carlo analysis of a LEO reentry mission by solid rocket propulsion7th European conference for aerospace sciences. 2017. p. 1–10. A. OKNINSKI 36. Lombardo G, Barbaro G, Mallandrino G, et al. Some considerations in support of solid propulsion for space debris disposal. Meccanica dei Materiali e delle Struttture 2011;2(8):118–25. 37. Leonard JA, Joseph WW. Aerospace nuclear safety: Controlled deorbit. 1966. 38. Briot D, Val SS. Airbus Defence and Space LEO Platforms compliance to SDM. Clean space industrial days, 2018. 39. Perrault SA. A controlled re-entry of satellites at the end of life [Internet]. Available from: http://blogs.esa.int/cleanspace/2018/ 11/12/a-controlled-re-entry-of-satellites-at-the-end-of-life/. 40. DeLaval J. Basics about controlled and semi-controlled reentry [Internet]. Available from: http://blogs.esa.int/cleanspace/2018/ 11/16/basics-about-controlled-and-semi-controlled-reentry. 41. Pakosz M, Nowakowski P, Okninski A, et al. Development of a solid rocket motor for an active deorbitation system. 68th international astronautical congress, 2017. 42. Martin T, Pérot E, Desjean MC, et al. Active debris removal mission design in low earth orbit. Progress in Propulsion Physics 2013;4:763–88. 43. Nowakowski P, Okninski A, Kasztankiewicz AB, et al. Challenges of developing a Solid Rocket Motor for direct deorbitation. 69th international astronautical congress, 2018. 44. Hunley J. The history of solid-propellant rocketry-What we do and do not know. Reston: AIAA;1999. Report No.: AIAA-1999-2925. 45. de Luca LT, Shimada T, Sinditskii VP, et al. Chemical rocket propulsion: A comprehensive survey of energetic materials. Berlin: Springer; 2017. 46. McDowel J, McDowel J. Kick in the apogee-40 years of upper stage applications for solid rocket motors. Reston: AIAA; 1997. Report No.: AIAA-1997-3133. 47. Kleurans B. The vanguard satellite launching vehicle an engineering summary. 1960. Report No.: 11022. 48. Orbital ATK. Propulsion products catalog[Internet]. Available from: www.orbitalatk.com/flight-systems/propulsion-systems/docs/ 2016%20OA%20Motor%20Catalog.pdf. 49. Zandbergen BTC. Some typical solid propellant rocket motors. Delft: Delft University of Technology; 2013. 50. McGrath DK. Surveyor and the birth of the STAR Motor Line. Reston: AIAA; 2014. Report No.: AIAA-2014-3889. 51. Griswold WS. Now we’re trying a Soft Landing. Popular Science 1965;187(4):102–5. 52. Hughes Aircraft Company. Surveyor spacecraft A-21A model description. 1964. Report No.:CR-84186. 53. Schmidt T, Bhandari P. Thermal design of a Europa lander mission concept. 49th international conference on environmental systems, 2019. 54. Palopoli S, Katz J, Mcgrath D. Europa clipper lander solid propulsion retro motor. AIAA propulsion & energy forum, 2019. 55. Wegener P, Krag H, Rex D, et al. The orbital distribution and dynamics of solid rocket motor particle clouds for an implementation into the master debris model. Adv Space Res 1999;23 (1):161–4. 56. Akiba R, Inatani Y. Alumina particles exhausted from soildpropellant rocket motor as a potential source of space debris. 1990. 57. Gleghorn G, Asay J, Atkinson D, et al. Orbital debris: A technical assessment. 1995. 58. Mueller AC, Kessler DJ. The effects of particulates from solid rocket motors fired in space. Adv Space Res 1985;5(2):77–86. 59. Pang BJ, Peng KK, Xiao WK, et al. Influence of solid rocket motor slag on the space debris environment. J Harbin Inst Technol 2013;20(6):15–20. 60. Jackson A, Eichler P, Reynolds R. The historical contribution of solid rocket motors to the one centimeter debris population. Second European conference on space debris, 1997. 61. Cook GE. Luni-solar perturbations of the orbit of an earth satellite. Geophys J Royal Astron Soc 1962;6(3):271–91. Solid rocket propulsion technology for de-orbiting spacecraft 151 62. Mulrooney M. An assessment of the role of solid rocket motors in the generation of orbital debris. Washington, D.C.: NASA; 2004. 63. Peng KK, Pang BJ, Xiao WK. The effects of orbital distribution from solid rocket motor slag. 6th European conference on space debris, 2013. 64. Stabroth S, Wegener P, Oswald M, et al. Introduction of a nozzle throat diameter dependency into the SRM dust size distribution. Adv Space Res 2006;38(9):2117–21. 65. Hermsen RW. Aluminum oxide particle size for solid rocket motor performance prediction. J Spacecr Rockets 1981;18 (6):483–90. 66. Wiedemann C, Gamper E, Horstmann A, et al. The contribution of NaK droplets to the space debris environment. 7th European conference on space debris, 2017. 67. Krisko PH, Flegel S, Matney MJ, et al. ORDEM 3.0 and MASTER-2009 modeled debris population comparison. Acta Astronaut 2015;113:204–11. 68. Musgrave GE, Larsen A, Sgobba T. Safety design for space systems. Oxford: Butterworth-Heinemann; 2009. 69. Day DA. Eye in the sky: The story of the CORONA spy satellites. Washington D.C.: Smithsonian Institution; 2015. 70. Krebs GD. KH-1 Corona [Internet]. Available from: https:// space.skyrocket.de/doc_sdat/kh-1.htm 71. Corona photographic surveillance satellites [Internet]. Available from: http://heroicrelics.org/info/corona/ corona-overview.html. 72. Wade M. KH-4 [Internet]. Available from: http://www.astronautix.com/k/kh-4.html. 73. McDonnel Aircraft Corporation. Project Mercury familiarization manual. Washington, D.C.: NASA; 1959. 74. Rocket motors, solid fuel, retrograde, Mercury # 19[Internet]. Available from: https://airandspace.si.edu/collection-objects/ rocket-motors-solid-fuel-retrograde-mercury-19. 75. Motor, solid fuel, project Mercury Retro; also designated TE-316 [Internet]. Available from: https://airandspace.si.edu/collectionobjects/motor-solid-fuel-project-mercury-retro-also-designatedte-316. 76. Artifact: Rocket motor, TE-M-385, solid propellant, gemini spacecraft retro[Internet]. Available from: http://www.spaceaholic.com/index.php/Detail/Object/Show/object_id/15. 77. Motor, rocket, solid fuel, TE-385, retro, gemini[Internet]. Available from: https://airandspace.si.edu/collection-objects/motorrocket-solid-fuel-te-385-retro-gemini. 78. Rocket motor, solid fuel, gemini retro, also designated TE-M-385 or 5.4-KS-2580[Internet]. Available from: https://airandspace.si. edu/collection-objects/rocket-motor-solid-fuel-gemini-retro -also-designated-te-m-385-or-54-ks-2580. 79. Boughers WL, Carr CE, Rauscher RA, et al. Prototype development of a solid propellant rocket motor and an electronic safing and arming device for Nanosatellite (NANOSAT) missions. 14th annual AIAA/USU small satellite conference, 2000. 80. Carr II, Walstrum DW. Solid rocket propulsion for smallsatellite applications. Third annual AIAA conference on small satellites, 1989. 81. Gao Y, Phipps A, Taylor M, et al. Lunar science with affordable small spacecraft technologies: MoonLITE and Moonraker. Planet Space Sci 2008;56(3–4):368–77. 82. Lorenz RD. Planetary penetrators: Their origins, history and future. Adv Space Res 2011;48(3):403–31. 83. Lardier C, Barensky S. Soyuz, launcher of the future. The Soyuz launch vehicle. New York: Springer; 2013. p. 349–76. 84. Wiedemann C, Homeister M, Oswald M, et al. Additional historical solid rocket motor burns. Acta Astronaut 2009;64(11– 12):1276–85. 85. Kislitsky M. Low cost small space boosters. Acta Astronaut 2003;52(9–12):947–55. 86. Wade M. Yantar-2K[Internet]. Available from: http://www. astronautix.com/y/yantar-2k.html. 87. Wade M. S5.4[Internet]. Available from: http://www.astronautix.com/s/s54.html. 88. Brügge N. Vostok-2, Gallery [Internet]. Available from: http:// www.b14643.de/Spacerockets_1/East_Europe_1/Semyorka/Gallery/Vostok-2.htm. 89. Fourth generation reconnaissance satellites-Yantar-2K[Internet]. Available from: http://www.svengrahn.pp.se/histind/Recces/fourth.htm. 90. Arsenal Design Bureau Federal State Unitary Enterprise. Arsenal: From the beginnings up until now. 2010. 91. Jiao S, Cui S. Achievement and prospect of satellite remote sensing technology in China. Imaging system technology for remote sensing.1998. p. 26–30. 92. Wade M. FSW[Internet]. Available from: http://www.astronautix.com/f/fsw.html. 93. Li CH, Zhao HG, Ni RL. China’s recoverable satellites and their onboard experiments. Microgravity Sci Technol 2008;20(2):61–5. 94. Tang B, Zhao H. Four decades’ development of China’s recoverable satellites. Aerospace China 2016;17(1):42–51. 95. Wang XJ. Development of China’s recoverable satellites. 1996. Report No.: NAIC-ID (RS) T-0299-96. 96. Brügge N. Some Chinese solid fuel aerospace motors[Internet]. Available from: http://www.b14643.de/Spacerockets/Specials/ SpaB_aerospace_motors/index.htm. 97. Huang JD, Ye DY. The development of space solid rocket motors in China. Acta Astronaut 1997;40(2–8):607–12. 98. Krebs GD. FSW-0 1, 2, 3, 4, 5, 6, 7, 8, 9 (JB-1 1, ..., 9) [Internet]. Available from: https://space.skyrocket.de/doc_sdat/fsw-0.htm. 99. Wade M. FSW retromotor[Internet]. Available from: http:// www.astronautix.com/f/fswretromotor.html. 100. Harvey B. China in space: The great leap forward. Berlin: Springer; 2019. 101. Anselmo L, Pardini C, Rossi A. Re-entry predictions for Cosmos 398, FSW-1 5 and TSS-1R. 2nd European conference on space debris, 1997. 102. Chen L. History of the Chinese recoverable satellite programme. 2012. 103. van der Pas N, Lousada J, Terhes C, et al. Target selection and comparison of mission design for space debris removal by DLR׳s advanced study group. Acta Astronaut 2014;102:241–8. 104. Yamamoto T, Okamoto H, Kawamoto S. Cost analysis of active debris removal scenarios and system architectures. 7th European conference on space debris, 2017. 105. Nowakowski P. Pre-qualification of aluminium-free solid propellant-Final presentation. 2019. 106. Schonenborg R. Solid Propellant Autonomous DE-orbit System (SPADES). Clean space industry days, 2016. 107. Guery JF, Chang IS, Shimada T, et al. Solid propulsion for space applications: An updated roadmap. Acta Astronaut 2010;66(1– 2):201–19. 108. Naumann KW, Weigand A, Ringeisen A. Solid rocket motors for the de-orbiting of satellites. 8th European conference for aeronautics and space sciences, 2019. 109. Schonenborg R. Solid propellant de-orbiting for constellation satellites. 4th international spacecraft propulsion conference, 2004. 110. Alexandru I. Performance evaluation of propulsion systems as LEO deorbiting devices. INCAS Bull 2017;9(3):55–69. 111. Kubota N. Propellants and explosives: Thermochemical aspects of combustion. Hoboken: John Wiley & Sons; 2015. 112. Agrawal JP. High energy materials: Propellants, explosives and pyrotechnics. Hoboken: John Wiley & Sons; 2010. 113. Tagliabue C, Weiser V, Imiolek A, et al. Burning behavior of AN/ADN propellants. 47th international annual conference of ICT, 2016. 114. Nagamachi MY, Oliveira JIS, Kawamoto AM, et al. ADN-The new oxidizer around the corner for an environ-mentally friendly smokeless propellant. J Aerosp Technol Manag 2009;1(2):153–60. 152 115. DeLuca LT. Innovative solid formulations for rocket propulsion. Eur Chem Tech J 2016;18(3):181–96. 116. Gettwert V, Tagliabue C, Weiser V, et al. Green Advanced High Energy Propellants for Launchers (GRAIL)-First results on the burning behavior of AN/ADN propellants. 6th European conference for aeronautics and space sciences, 2015. 117. van der Heijden AEDM, Leeuwenburgh AB. HNF/HTPB propellants: influence of HNF particle size on ballistic properties. Combust Flame 2009;156(7):1359–64. 118. Kettner MA, Klapötke TM. Synthesis of new oxidizers for potential use in chemical rocket propulsion. Chemical rocketpropulsion. Berlin: Springer; 2017. p. 63–88. 119. Nair UR, Sivabalan R, Gore GM, et al. Hexanitrohexaazaisowurtzitane (CL-20) and CL-20-based formulations (review). Combust Explos Shock Waves 2005;41(2):121–32. 120. Strunin VA, Nikolaeva LI. Combustion mechanism of RDX and HMX and possibilities of controlling the com-bustion characteristics of systems based on them. Combust Explos Shock Waves 2013;49(1):53–63. 121. Son SF, Berghout HL, Bolme CA, et al. Burn rate measurements of HMX, TATB, DHT, DAAF, and BTATz. Proc Combust Inst 2000;28(1):919–24. 122. Oommen C. Ammonium nitrate: A promising rocket propellant oxidizer. J Hazard Mater 1999;67(3):253–81. 123. Kohga M, Naya T, Okamoto K. Burning characteristics of ammonium-nitrate-based composite propellants with a hydroxylterminated polybutadiene/polytetrahydrofuran blend binder. Int J Aerosp Eng 2012;2012:1–9. 124. Maggi F, Garg P. Fragmentation of ammonium nitrate particles under thermal cycling. Prop, Explos, Pyrotech 2018;43(3):315–9. 125. Bharti MK, Chalia S. Stabilization of ammonium nitrate for phase modification (Ⅱ) by co-crystallization with copper (Ⅱ) nitrate (trihydrate). Int J Eng Res General Sci 2014;2(4):518–22. 126. Kumar P, Kumar M, Lakra R. Effect of catalysts on the burning rate of phase stabilized ammonium nitrate based composite propellants. IOP Conf Ser: Mater Sci Eng 2018;455:012022. 127. Naumann K, Rienacker C, Weigand A. Solid rocket motors with particle-free composite propellant at Bayern-Chemie. Clean space industry days, 2015. 128. D’Andrea B, Lillo F, Faure A, et al. A new generation of solid propellants for space launchers. Acta Astronaut 2000;47(2– 9):103–12. 129. Bozic VS, Milos MV. Effects of oxidizer particle size on propellants based on modified polyvinyl chloride. J Propuls Power 2001;17(5):1012–6. 130. Brill TB, Ren WZ, Yang V. Solid propellant chemistry, combustion, and motor interior ballistics. Reston: AIAA; 2000. 131. Thomas JC, Morrow GR, Dillier CA, et al. Comprehensive study of AP particle size and loading effects on the burning rates of composite AP/HTPB propellants. Reston: AIAA; 2018. Report No.: AIAA-2018-4874. 132. Miller R. Effects of particle size on reduced smoke propellant ballistics. Reston: AIAA;1982. Repor No.: AIAA-1982-1096. 133. Morrow GR, Petersen EL. The effects of AP particle size and concentration on AP/HTPB composite propellant burning rates. Reston: AIAA; 2017.Report No.: AIAA-2017-0831. 134. Jain S, Mehilal M, Nandagopal S, et al. Size and shape of ammonium perchlorate and their influence on properties of composite propellant. Def Sci J 2009;59(3):294–9. 135. Al-Harthi A, Williams A. Effect of fuel binder and oxidiser particle diameter on the combustion of ammonium perchlorate based propellants. Fuel 1998;77(13):1451–68. 136. Kohga M. Burning rate characteristics of ammonium perchloarte-based composite propellant using bimodal ammonium perchlorate. J Propuls Power 2008;24(3):499–506. 137. Kohga M. Burning characteristics and thermochemical behavior of AP/HTPB composite propellant using coarse and fine AP particles. Propellants Explos Pyrotech 2011;36(1):57–64. A. OKNINSKI 138. Isert S, Hedman TD, Lucht RP, et al. Oxidizer coarse-to-fine ratio effect on microscale flame structure in a bi-modal composite propellant. Combust Flame 2016;163:406–13. 139. Vesna R, Miomir B. Influence of trimodal fraction mixture of ammonium-perchlorate on characteristics of composite rocket propellants. Sci Technol Rev 2006;56(2):38–44. 140. Knott GM, Jackson TL, Buckmaster J. Random packing of heterogeneous propellants. AIAA J 2001;39:678–86. 141. Nowakowski P, Pakosz M, Okninski A, et al. Design of a solid rocket motor for controlled deorbitation. Reston: AIAA;2017. Report No.: AIAA-2017-5083. 142. Adel WM, Liang GZ. Service life prediction of AP/Al/HTPB solid rocket propellant with consideration of sof-tening aging behavior. Chin J Aeronaut 2019;32(2):361–8. 143. Cohen NS, Fleming RW, Derr RL. Role of binders in solid propellant combustion. AIAA J 1974;12(2):212–8. 144. Bazaki H, Kubota N. Effect of binders on the burning rate of AP composite propellants. Propellants Explos Pyrotech 2000;25 (6):312–6. 145. Okniński A, Nowakowski P, Kasztankiewicz A. Survey of lowburn-rate solid rocket propellants. Innovative energetic materials: Properties, combustion performance and application. Singapore: Springer Singapore; 2020. p. 313–49. 146. Davenas A. Future of solid rocket propulsion. Solid rocket propulsion technology. Amsterdam: Elsevier; 1993. p. 585–602. 147. Kubota N, Sonobe T, Yamamoto A, et al. Burning rate characteristics of GAP propellants. J Propul Power 1990;6 (6):686–9. 148. Maksimowski P, Kasztankiewicz AB, Kopacz W. 3, 3-Bis (azidomethyl) oxetane (BAMO) synthesis via pentaerythritol tosyl derivates. Prop, Explos, Pyrotech 2017;42(9):1020–6. 149. Jensen TL, Unneberg E, Kristensen TE. Smokeless GAP-RDX composite rocket propellants containing diami-nodinitroethylene (FOX-7). Prop, Explos, Pyrotech 2017;42(4):381–5. 150. Cheng TZ. Review of novel energetic polymers and binders-high energy propellant ingredients for the new space race. Des Monomers Polym 2019;22(1):54–65. 151. Young GHS. Methods of burnins rate control in solid propellants. The chemistry of propellants. Amsterdam: Elsevier; 1960. p. 285–302. 152. Thompson WW. Suppressants for lowering propellant binder burning rate. 1972. 153. Krowicki K, Syczewski M. Solid rocket propellants. 1967. 154. Bozic V. Effects of burning rate modifiers on the modified polyvinyl chloride-based propellantsInternational conference on high energetic materials and dynamics of ultrafast reactive systems. 2010. p. 1–6. 155. Nowakowski P, Kasztankiewicz AB, Marciniak B, et al. Space debris mitigation using dedicated solid rocket motor. 8th European conference for aeronautics and space sciences, 2019. 156. Kuo KK. Fundamentals of solid-propellant combustion. Reston: AIAA; 1984. 157. Reshmi SK, Ninan KN, Varghese TL. A slow burn propellant composition with high performance characteristics. India patent 250645. 2012. 158. Poulter LW, Nelson RW, Smalley RB, et al. Robust propellant liner and interfacial propellant burn rate control. United States patent US 5767221. 1998. 159. Kubota N, Hirata N. Inhibition reaction of LiF on the combustion of ammonium perchlorate propellants. Symp Int Combust 1985;20(1):2051–6. 160. Rodić V. Effect of titanium (IV) oxide on composite solid propellant properties. Scientific Technical Review 2012;62(3– 4):21–7. 161. Baek G, Yim YJ. Coolant effect on gas generator propellant. J Korean Soc Propulsion Eng 2005;6:1–8. 162. Sun YL, Li SF, Ding DH. Effect of ammonium oxalate/ strontium carbonate on the burning rate characteristics of Solid rocket propulsion technology for de-orbiting spacecraft 153 composite propellants. J Therm Anal Calorim 2006;86 (2):497–503. Trache D, Maggi F, Palmucci I, et al. Effect of amide-based compounds on the combustion characteristics of composite solid rocket propellants. Arab J Chem 2019;12(8):3639–51. Glaskova AP. Three possible ways to inhibit the ammonium perchlorate combustion process. AIAA J 1975;13(4):438–42. Manash A, Kumar P. Comparison of burn rate and thermal decomposition of AP as oxidizer and PVC and HTPB as fuel binder based composite solid propellantsDefence Technology. Amsterdam: Elsevier; 2019. p. 227–32. Beckstead MW. Solid propellant combustion mechanisms and flame structure. Pure Appl Chem 1993;65(2):297–307. Cai WD, Thakre P, Yang V. A model of AP/HTPB composite propellant combustion in rocket-motor environ-ments. Combust Sci Technol 2008;180(12):2143–69. Boldyrev VV. Thermal decomposition of ammonium perchlorate. Thermochim Acta 2006;443(1):1–36. Trache D, Maggi F, Palmucci I, et al. Thermal behavior and decomposition kinetics of composite solid propellants in the presence of amide burning rate suppressants. J Therm Anal Calorim 2018;132:1601–15. Korobeinichev OP, Anisiforov GI, Shkarin AV. Kinetics of catalytic decomposition of ammonium perchlorate and its mixtures with polystyrene. Combustion, Explosion, and Shock Waves 1973;9:54–60. Sell T, Vyazovkin S, Wight CA. Thermal decomposition kinetics of PBAN-binder and composite solid rocket propellants. Combust Flame 1999;119:174–81. Glazkova A, Popova P. Inhibitors of combustion and ammonium nitrate and ammonium perchlorate and their mixtures. 1968. Glazkova A. Inhibition of the effect of reducing agents on the combustion of ammonium perchlorate. Combustion, Explosion, and Shock Waves 1974;10:179–83. Dey A, Ghorpade VG, Kumar A, et al. Biuret: A potential burning rate suppressant in ammonium chlorate (VII) based composite propellants. Cent Eur J Energetic Mater 2014;11 (1):3–13. Miyata K, Kubota N. Inhibition reaction of SrCO3 on the burning rate of ammonium perchlorate propellants. Propellants Explos Pyrotech 1990;15(4):127–31. Ghorpade VG, Dey A, Jawale LS, et al. Study of burn rate suppressants in AP-based composite propellants. Propellants Explos Pyrotech 2010;35(1):53–6. Komarov VF. Catalysis and inhibition of the combustion of ammonium perchlorate based solid propellants. Combust Explos Shock Waves 1999;35(6):670–83. Faber D, Overlack A, Welland W, et al. Nanosatellite deorbit motor. 27th annual AIAA/USU conference on small satellites, 2013. Company Ad Astra Rocket. Ad Astra’s VASIMRÒ space tug Low Earth Orbit (LEO) space cleaner. 2013. Tappan BC, Dallmann NA, Novak AM, et al. High DeltaV solid propulsion system fort small satellites. Small satellite conference, 2016. Scientific Pacific. Satellite propulsion system[Internet]. Available from: https://psemc.com/products%20/satellite-propulsion-system/. Nelson SD, Current PC, Stadler S. Propulsion system comprising plurality of individually selectable solid fuel motors. United States patent 9790895. 2017. Nelson SD, Current P. Modular Architecture Propulsion System (MAPSTM). Reston: AIAA; 2018. Report No.: AIAA-2018-4704. Chandler A. PacSci EMC demonstrates first ever successful orbital maneuvers and orbit raising of a cubesat using a commercial solid rocket motor array[Internet]. Available from: www.businesswire.com/news/home/20170925006504/en/PacSciEMC-Demonstrates-Successful-Orbital-Maneuvers-Orbit. 185. Pacific Scientific. MAPSTM satellite propulsion system (modular architecture propulsion system)[Internet]. Available from: www. psemc.com/products/networked-electronic-ordnance-devices/ satellite- propulsion-system. 186. Fanfani A. D-SAT mission: An in-orbit demonstration of satellite controlled re-entry. Clean space industry days, 2017. 187. Antonetti S, Luraschi E. Lessons learnt from the past three years of activities on Space Debris. Clean space industrial days, 2018. 188. European Space Agency. D-SAT CubeSat mission—Demonstration of a decommissioning device[Internet]. Available from: https:// directory.eoportal.org/web/eoportal/satellite-missions/d/d-sat. 189. Wander A, Konstantinidis K, Förstner R, et al. Autonomy and operational concept for self-removal of space-craft: Status detection, removal triggering and passivation. Acta Astronaut 2019;164:92–105. 190. Voigt P, Vogt C, Schubert R, et al. TeSeR–Technology for selfremoval–status of a horizon 2020 project to ensure the postmission-disposal of any future spacecraft. Proceedings of the 69th International Astronautical Congress (IAC), 2018. 191. D-Orbit. D3: Quick and safe removal at the end of life[Internet]. Available from: https://www.dorbit.space/d3. 192. European Space Agency. Fenix [Internet]. Available from: https://www.esa.int/ESA_Multimedia/Images/ 2018/07/Fenix. 193. Wormnes K, Le Letty R, Summerer L, et al. ESA technologies for space debris remediation6th European conference on space debris. 2013. p. 1–8. 194. Okninski A, Marciniak B, Sobczak K, et al. Development of aluminium-free propellants and solid rocket motors for deorbiting applications in poland. Clean space industrial days, 2016. 195. Bandecchi M, Melton B, Ongaro F. Concurrent engineering applied to space mission assessment and design. ESA Bull 1999;99:34–41. 196. Verberne CJ. CleanSat session Deorbitation strategy of nanosats in Norway. Clean space industrial days, 2016. 197. Nowakowski P. Space debris mitigation using dedicated solid rocket propulsion. Geneva: United Nations; 2020. Report No.: COPUOS/stsc/2020/tech-49E. 198. Yang D, Xiong YL, Ren Q, et al. Nutation instability of spinning solid rocket motor spacecraft. Chin J Aeronaut 2017;30 (4):1363–72. 199. Webster E. Active nutation control for spinning solid motor upper stages. Reston: AIAA;1985. Report No.: AIAA-19851382. 200. Swiatek P. Simulation of satellite’s deorbitation with the use of thrust vector control system[dissertation]. Warsaw: Warsaw University of Technology; 2018. 201. Krammer A, Rottmeier F. Thrust vector control system for solid propellant de-orbit motors. Clean space industrial days, 2016. 202. Krammer A, Rottmeier F. Novel thrust vectoring mechanism design for controlled de-orbiting based on solid rocket motor propulsion. Noordwijk. Clean space industry days, 2018. 203. Summerfield M. Solid propellant rocket research. Reston: AIAA; 1960. 204. Shorr M, Zaehringer AJ. Solid rocket technology. Hoboken: John Wiley & Sons Inc; 1967. 205. Guirao C, Williams FA. A model of ammonium perchlorate deflagration between 20 and 100 atm. AIAA J 1971;9(7):1345–56. 206. Hayakawa S, Nakao C, Tanaka M. An effect of oxidizer particle size on combustion stability in composite propellants. Reston: AIAA; 2000. Report No.: AIAA-2000-3700. 207. Unnikrishnan K, Pandureng LP, Krishnamurthy VN. The effect of vacuum and radiation on solid propellant properties. Propellants Explos Pyrotech 1981;6(5):121–5. 208. Shulman H, Ginell WS. Nuclear and space radiation effects on materials. Washington, D.C.: NASA; 1970. Report No.: NASA SP-8053, 15. 163. 164. 165. 166. 167. 168. 169. 170. 171. 172. 173. 174. 175. 176. 177. 178. 179. 180. 181. 182. 183. 184. 154 209. Maurer RH, Fraeman ME, Martin MN, et al. Harsh environments: Space radiation environment, effects, and mitigation. Johns Hopkins APL Technical Digest 2008;28(1):17–28. 210. Caffrey J, Vaughn J, Schneider T, et al. Analyses and methods of solid rocket motor material irradiation at marshall space flight center. Applied space environments conference, 2019. 211. Kirichenko AC, Kushnir BI, Maly PL, et al. Increasing the efficiency of solid propellant rocket motors based on the development and implementation of new design and engineering solutions of Yuzhnoye Design Bureau. Space technology, Missile armament. 2014. p.89-96 [Russian]. 212. Slysarenko VF. Features of development of thrust vector control systems of RDTT in KB-5. Space technology, Missile armament. 2016. p. 97-104 [Russian]. A. OKNINSKI 213. Yuzhnoye. Yuzhnoye solid rocket motors[Internet]. Available from: https://www.yuzhnoye.com/ en/company/history/solidrocket-motors.html. 214. Compton J, Thies C, Kurzeja S, et al. Five-minute rocket motor. Reston: AIAA; 1974. Report No.: AIAA-1974-1203. 215. Mathesius KJ, Hansman RJManufacturing methods for a solid rocket motor propelling a small, fast flight vehicle[dissertation]. Cambridge: Massachusetts Institute of Technology; 2019. 216. Song AC, Wang NF, Li JW, et al. Transient flow characteristics and performance of a solid rocket motor with a pintle valve. Chin J Aeronaut 2020;33(12):3189–205.