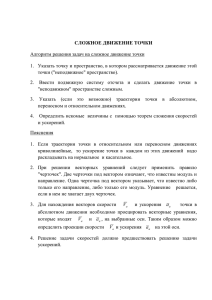
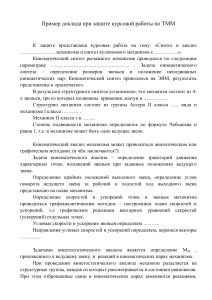
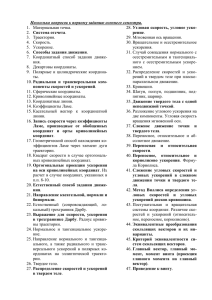
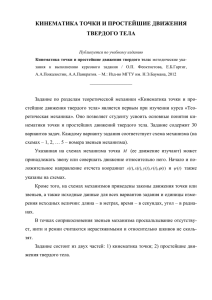
ПЕРВОЕ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧЕБНОЕ ЗАВЕДЕНИЕ РОССИИ МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОРНЫЙ УНИВЕРСИТЕТ» Кафедра машиностроения КУРСОВАЯ РАБОТА По дисциплине «Прикладная механика» Тема:«Структурный и кинематический анализ плоского рычажного механизма. Расчет балки на прочность при плоском изгибе» Выполнил: студент гр. ДГ-21 Соколов В.А. (подпись) (Ф.И.О.) Дата: Оценка: Проверил: доцент (должность) Бабырь Н.В. (подпись) Санкт-Петербург 2024 (Ф.И.О.) Содержание СОДЕРЖАНИЕ ....................................................................................................................................................... 2 1. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА ........................................................................................................ 3 2. ПОСТРОЕНИЯ ПЛАНОВ ПОЛОЖЕНИЙ МЕХАНИЗМА .................................................................................. 6 3. ПОСТРОЕНИЕ ПЛАНОВ СКОРОСТЕЙ ............................................................................................................ 7 4. ПОСТРОЕНИЕ ПЛАНОВ УСКОРЕНИЙ......................................................................................................... 11 5. РАСЧЕТ БАЛКИ НА ПРОЧНОСТЬ ПРИ ПЛОСКОМ ИЗГИБЕ ......................................................................... 15 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ...................................................................................................... 18 2 1. Структурный анализ механизма Исследуемый механизм, кинематическая схема, которого приведена на рис. 2.1 служит для преобразования вращательного движения кривошипа 1 (входное звено) движение коромысла 3 (выходное звено). Рисунок 1.1 – Кинематическая схема механизма Механизм состоит из трех звеньев: 1- кривошип, 2 –шатун, 3 – коромысло. Звенья механизма образуют между собой следующие кинематические пары: O1(4-1) – кинематическая пара пятого класса, вращающееся низшая A(1-2) – кинематическая пара пятого класса, вращающееся низшая; B(2-3) – кинематическая пара пятого класса, поступательная низшая; O3(3-4) – кинематическая пара пятого класса, вращающееся низшая; Определяем степень подвижности механизма по формуле: W 3n 2 p5 p4 , где, р5 – число кинематических пар V класса; р4 – число кинематических пар IV класса; n – число подвижных звеньев. Итак, W 3 3 2 4 0 1. Так как W=1 то у механизма одно входное звено. Раскладываем механизм на группы Ассура 3 Рисунок 1.2 – Структурная группа 3-2 Данная группа состоит: – из двух подвижных звеньев (шатун 2 и коромысло 3), т.е. n 2 ; – двух свободных поводков (кривошип 1 и стойка 4); – трёх кинематических пар (вращательная 2 – 3, вращательная 1 – 3, вращательная 3 – 4), т.е. p5 3 . Подставив найденные значения коэффициентов в формулу Чебышева, получаем: W 3 n 2 p5 p4 3 2 2 3 0 0 Равенство нулю подвижности группы доказывает, что рассматриваемая группа звеньев 2 – 3 является структурной группой. Данная группа является: – группой второго класса, так как состоит из двух подвижных звеньев; – группой второго порядка, так как имеется два свободных поводка; – группой первого вида, так как состоит из трёх вращательных кинематических пар (ВВВ). Данная группа II класса и 1-го вида 4 Рисунок 1.3 – Начальный механизм Данная группа состоит: – из одного подвижного звена (кривошип 1) и шарнирно-неподвижной опоры (стойка 4), т.е. n 1 ; – одной кинематической пары (вращательная 4 – 1), т.е. p5 1. Подставив найденные значения коэффициентов в формулу Чебышева, получаем: W 3 n 2 p5 p4 3 1 2 1 0 1 Подвижность исследуемой группы получилась больше нуля, следовательно она не является структурной группой, а представляет собой первичный (элементарный) механизм, с подвижностью равной единице. Из проведенного анализа следует, что структурная схема механизма состоит из двух структурных групп звеньев и одного первичного механизма. Так как класс механизмов определяется классом наиболее сложной структурной группы, то рассматриваемый рычажный механизм является механизмом 2-го класса, с подвижностью равной единице. 5 2. Построения планов положений механизма Перед выполнением кинематического анализа осуществляют метрический синтез механизма с помощью графоаналитического метода, т. е. определяют возможные угловые положения звеньев на плоскости или в пространстве. Результатом выполнения метрического синтеза является построенная кинематическая схема механизма и план положений механизма. Для построения принимаем масштабный коэффициент длины µS=0.0025м/мм. Далее переводят все геометрические линейные размеры в масштабный коэффициент длин и получают величины отрезков, изображающие заданные геометрические параметры в составе соответствующей кинематической схемы: lO A 0,13 O1 A 1 52 мм; S 0,0025 ВA lBA S ВO3 ВC lBO3 S lBC СO3 0,64 256 мм; 0,0025 S lCO3 S 0,2 80 мм; 0,0025 0,32 128 мм; 0,0025 0,608 243,2 мм. 0,0025 Используя полученные величины отрезков геометрических параметров механизма, методом засечек, строят его кинематическую схему. Для этого на плоскости произвольно выбираем точку О1 (центр вращения кривошипа). Относительно её находим расположение точки О3 (центр вращения коромысла). Из точки О1 проводим окружность радиусом A О1. Из точки О3 проводим дугу ВО3. Вычерчиваем крайние положения при котором кривошип АО1 и шатун АВ вытягиваются в одну прямую линию. Для этого из точки О1 проводим дугу размерам OB0 AB O1 A 256 52 308 мм. OB ' AB O1 A 256 52 204 мм. до пересечения с дугой ВО3 и получаем крайнее положения точки В. С полученной точки В проводим прямую к точке О1. В месте пересечения этих прямых с окружностью АО1 получаем крайние положения точки А – А0. С точки А0 окружность ОА разбиваем на 10 частей в сторону угловой скорости и получаем положение точек А. С точек А делаем зачески на дуге В О3 радиусами АВ и получаем положения точек В. 6 3. Построение планов скоростей Построение плана скоростей для заданного положения механизма позволяет решить одну из задач кинематического анализа, а в частности определить величины и направления линейных, относительных и угловых скоростей характерных точек и звеньев механизма Для заданного положения механизма построим план скоростей, который представляет собой пучок векторов, выполненный в определенном масштабном коэффициенте скоростей , лучи которых изображают вектора линейных скоростей характерных точек механизма, а отрезки, соединяющие вершины этих векторов, соответствуют векторам относительных скоростей звеньев. При этом построение плана основано на последовательном графическом решении векторных уравнений. Так как угловая скорость ведущего звена постоянна ( 1 const ), то по заданной частоте вращения кривошипа определяем её величину: 1 n 30 250 30 26,18c 1. Рассмотрим положение 1. Скорость точки А равна VA l АO 1 0,13 26,18 3,4 м / с. Точка O1 в схеме механизма является неподвижной, следовательно, модуль её скорости равен нулю ( VO1 0 ). Вектор скорости V A направлен перпендикулярно оси кривошипа, а линия действия совпадает с направлением вращения ведущего звена. На плане скоростей скорость точки а изображается отрезком рV a . Масштабный коэффициент плана скоростей V 3,4 м/с v A 0,05 pV a 68 мм Точка B принадлежит двум звеньям, шатуну 2 и коромыслу 3, поэтому для неё запишем два векторных уравнения. Вектор скорости точки B, принадлежащей шатуну 2, представляет собой геометрическую сумму векторов скорости точки A и скорости относительного вращательного движения точки B вокруг точки A. Для коромысла, вектор скорости точки B представляет собой геометрическую сумму векторов скорости точки O3 и скорости относительного вращательного движения точки B вокруг точки O3. 7 VB VA VBA BA VB VO VBO BO где, V A - скорость т.А , вычисленная по модулю и направлена перпендикулярно звену АО в сторону вращения кривошипа; VBA - скорость т.В при вращении шатуна вокруг т.А, перпендикулярна АВ, неизвестная по модулю (т.к. как угловая скорость шатуна не известна). VO - скорость точки О3 (равна 0 = так как она неподвижна). 3 3 3 3 вокруг т.О3, VBO - скорость т.В при вращении коромысла перпендикулярна ВО3, неизвестная по модулю (т.к. как угловая скорость шатуна не известна). Решаем уравнение графически. Для этого из точки a проводим прямую, перпендикулярно до звена AВ, а с полюса прямую перпендикулярно звено BO3. В точке пересечения получаем точку b. Скорости равны VB pV b V 34,3 0,05 1,72 м / с; 3 VBA (ab) V 51 0,05 2,55 м / с. На схеме механизма точка |C принадлежит коромыслу 3. Следовательно, и на плане скоростей точка c будет лежать на отрезке pvс в соответствии с теоремой о подобии. Отрезок pV c определяем из пропорции ( pV c) CO3 243,2 ( pV b) 34,3 65,2 мм. BO3 128 Скорость точки C равна VC pV c V 65,2 0,05 3,26 м / с. Определяем угловые скорости V 2,55 2 BA 3,98c 1. l AB 0,64 3 VB 3,26 5,38c 1. lBO3 0,32 Вектора скоростей центров масс находятся на середине их звеньев VS2 pV s2 V 47,4 0,05 2,37 м / с. VS3 pV s3 V 32,8 0,05 1,64 м / с. 8 Аналогично выполняем построения для других положений и результаты заносим в таблицы 4.1- 4.2. Таблица 3.1 – Длины вектор скоростей Поло жение механизма 0 1 pV Вектора скоростей, мм pV pvs c 2 0 34 65, 47, 2 4 12 68, 9,6 1 16 8,5 70 10 36, 1,8 9 38, 42, 6 8 11 64, 7,7 8 13 68, 4,3 8 11 60, 1,8 4 62, 44, 6 4 pV a b 68 0 34, 68 3 2 68, 68 2 3 68, 68 7 4 53, 68 6 5 20, 68 3 6 61, 68 9 7 70, 68 7 8 58, 68 8 9 32, 68 9 pvs (ab) 3 0 32, 68 8 51 65, 1 0,4 73, 84, 7 1 51, 97, 2 7 19, 52, 4 5 59, 10, 2 7 67, 16, 5 4 56, 39, 2 3 31, 59, 5 5 Таблица 3.2 –Величины скоростей Скорости звеньев V V V Поло жение механизма V A, V B, м /с 0 C, м /с s2 м м /с /с 3 0 1 3 ,4 2 ,72 3 ,4 3 0 3 /с м /с ,41 6 ,44 ,64 3 ,48 3 0 1 2 ,37 ,41 8 ,5 9 с ,24 5 2 ,98 ,02 ,38 0 ,03 3 ,66 0 5 3 0 4 с -1 ,31 ,55 ,26 ω 3, -1 ,4 3 3 ,43 2, 3 ,7 ,26 3 3 ,4 м 1 ,4 1 BA, s3 ω V 1 0,66 5 ,72 1 0,75 4 3 ,4 5 2 ,68 3 ,4 6 1 3 7 8 3 ,4 9 ,94 5 ,38 ,02 3 ,81 2 ,13 ,22 10 ,58 1 1,06 3 ,08 2 ,98 ,69 ,28 ,97 9 1 1 1 ,19 ,84 ,82 3 0 0 2 ,38 ,11 ,54 8 4 0 3 3 ,59 1 ,65 ,44 ,64 ,63 ,96 7 2 2 3 ,72 2 3 ,4 6 ,89 ,97 ,24 4 0 3 ,89 ,54 ,56 ,14 5 3 2 2 ,93 ,1 ,4 ,85 1 3 3 1 ,09 ,02 ,4 5 9 ,19 4 ,66 5 ,16 4. Построение планов ускорений Вектор ускорения точки А представляет собой геометрическую сумму векторов ускорения точки О и ускорения относительного вращательного движения точки А вокруг точки О, который, в свою очередь, раскладывается на сумму векторов нормального и тангенциального ускорений: n t a A aO a AO a AO . 1 1 1 AO1 AO1 где aO1 – ускорении точки A=0, так как она неподвижна; n a АO нормальное ускорение точки A. Его величина 2 t a AO 1 n aAO 12 lO1A 26,182 0,13 89,1м / с2 . 1 тангенциальное ускорение точки О=0 так как угловое ускорение кривошипа равно 0. Выбираем положение точки pa – полюс и проводим вектор нормального ускорения точки A. Масштабный коэффициент плана ускорений: n a AO 1 89,1 м / с2 a 1,3 . pa a 68,5 мм Далее записываем векторные уравнения распределения линейных и относительных ускорений для характерных точек механизма, по которым в дальнейшем построим план. Вектор ускорения точки В, принадлежащей шатуну 2, представляет собой геометрическую сумму векторов ускорения точки А и векторов нормального и тангенциального ускорений относительного вращательного движения точки В вокруг точки А . Для коромысла, вектор ускорения точки В представляет собой геометрическую сумму векторов ускорения точки O3 и векторов нормального и тангенциального ускорений относительного вращательного движения точки В вокруг точки O3. Векторное уравнение примет вид: n t aB a A aBA aBA n t aB aO aBO aBO 3 11 3 3 Нормальные ускорения равны n aBA 22 lBA 3,982 0,64 10,14 м / с 2 . n aBO 32 lBO3 5,382 0,32 9,26 м / с 2 . 3 Определяем длину векторов нормальных ускорений an2 n aBA a n aBO 3 10,14 7,8 мм. 1,3 9,26 7,1мм. a 1,3 Графически решаем данную систему и определяем ускорения. Для этого из точки a проводим вектор нормального ускорения параллельно звену BA. Из конца вектора нормального ускорения проводим вектор тангенциального ускорения. С полюса проводим вектор нормального ускорения параллельно звену BO3, а из конца нормального проводим вектор тангенциального ускорения. В месте пересечения тангенциальных ускорений получаем точку b. Ускорения равны pa n3 aB pab a 55,7 1,3 72,41м / с 2 ; aBA ba a 54,3 1,3 70,59 м / с 2 . Положение точки C найдем из подобия: ( pa c) CO2 243,2 ( pab) 55,7 105,8 мм. BO2 128 Ускорение точки C равно aC pa c a 105,8 1,3 137,54 м \ с 2 . Определяем тангенциальные ускорения: t aBA n2b a 53,7 1,3 69,81м / с 2 . t 2 aBO n b 55,2 1,3 71,76 м / с . 3 a 3 12 Угловое ускорение t aBA 69,81 2 109,08c 2 . lBA 0,64 3 t aBO 3 lBO3 71,76 224,25c 2 . 0,32 Ускорения центров масс равны aS2 pa s2 a 56,2 1,3 73,06 м / с 2 . aS3 pa s3 a 53,2 1,3 69,16 м / с 2 . Таблица 4.1 – Значение и длинны векторов нормальных ускорений Поло жение механизма n a BO n aBA м/с2 18,05 10,14 0 20,94 37,36 10,81 0,45 1,05 6,07 13,9 0 1 2 3 4 5 6 7 8 9 3 м/с2 0 9,26 36,36 36,98 22,47 3,26 30,05 39,14 27,03 8,52 (an2), мм (pan3), мм 13,9 7,8 0 16,1 28,7 8,3 0,3 0,8 4,7 10,7 0 7,1 28 28,4 17,3 2,5 23,1 30,1 20,8 6,6 Таблица 4.2 – Вектора ускорений в 10-ти положениях механизма Поло жение механизма p aa 0 p ab 6 8,5 1 5 4,7 6 8,5 2 5 5,7 6 8,5 3 5 8,2 6 8,5 3 2,5 Векторы ускорений, мм p p p ( ba) ac as2 as3 1 6 5 1 03,9 1,6 2,3 4,3 1 5 5 5 05,8 6,2 3,2 4,3 1 3 5 1 10,6 2,4 5,6 09,3 6 3 3 7 1,7 6 1 9,4 13 n 2b n 3b 3 ,4 5 4,7 5 3,7 5 5,2 1 09,3 5 1 7 7,7 1 5,8 4 6 1 8,5 5 12,2 1 8,5 4 3 8,5 8 0,6 6 3 8,5 9 5 6 4 9 9,6 5 4,2 3 5,6 3 3 0,1 3 5,9 7,4 3 8 3 3 5,7 4 8 00,7 5 8 6,3 1 1,9 3 0,4 10,8 8 5 1,9 9,2 1 2 2 9,5 2,2 8 2,4 0,5 4 3 4,8 4 0,7 7 8 8,5 5 8,1 5,1 6,2 5 4 9 5,6 0,6 6 07,2 8 2,4 1 7 91,3 6 7 0,1 1 00,7 8,5 9 13,2 6 6 2 2 8,6 1,8 3 4 6,5 9,1 Таблица 4.3 –Ускорения точек в 10-ти положениях механизма П оложе ние механ изма 0 1 2 3 4 5 6 7 8 9 a A a B a C Величина ускорений, м/с2 t a a a aBA S2 S3 t a BO 3 2 3 BA c -2 8 9,05 7 1,11 8 9,05 7 2,41 8 9,05 8 45,86 9,05 30,91 8 9,05 5 8 1 3 8 4 8 9 3 6 4 4 6 1,62 14 3 7,18 1 22,28 7 2,52 6 3,83 1 44,63 7 4 4 7,45 1 7,19 1,34 4 09,09 05,42 3 4 6,41 50,13 66,56 9,13 4 1 4 4 9,4 6,67 0,69 6,28 6 4,19 7 1 6 4 1 1 30,91 2 07,19 57,83 44,04 7,47 9,4 7,19 7 5,4 6 2 2 1 06,6 7,47 7,96 5,52 1 22,46 5 6 5,24 2 24,25 22,02 0,54 4 1 07,12 2,65 4,35 3,86 6 4,48 6 7 8,63 1 6 1 2 22,22 09,08 6,3 01,01 5 1 25,06 5,91 5,53 9,4 39,36 7 1 1 6 ,91 1,76 42,09 03,22 1 9 8,28 04,78 9,78 9,05 17,13 6 1 4 7 1,11 9,81 42,09 0,3 1 2 48,69 5,12 9,05 9,05 77,16 7 7 4 4 ,42 0,59 2,28 6,8 2 1 6 4 8 1 8,59 9,16 2,12 0,21 1 8 7 1 4 6 7,99 3,06 43,78 2,25 9,05 1 7 8 8 0,08 37,54 5,66 9,05 1 35,07 c -2 1 29,19 7 4,14 1 99,47 5. Расчет балки на прочность при плоском изгибе 1. Определить опорные реакции. 2. Построить эпюры поперечных сил и изгибающих моментов. 3. Выявить опасное сечение и определить диаметр сечения балки. С P M , хема , кН , кНм кН/м 1 6 1 5 2 0 Форма сечения q ,м 1 0 ,м 1 ,м 1 ,м 1 1 [] , МПа Прямоу 3 гольник 00 h / b 1,75 РЕШЕНИЕ ЗАДАЧИ 2м 1м 1м 15,0 ( кН) 3,33 3 13,3 13,3 33 33 ( кНм) 6,66 157 26,667 15,0 Определение опорных реакций. mB 0 : RA (a b c) M P d q c (c / 2) 0 M P d q c (c / 2) RA abc 20 15 1 10 1 (1/ 2) -13,333 кН 111 c RB (a b c) M P (a b c d ) q c a b 0 2 c M P (a b c d ) q c a b 2 RB abc 1 20 15 (1 1 1 1) 10 1 1 1 2 18,333 кН. 111 Проверка y 0 : RA RB P q c -13,333+18,333 15 10 1 0 . mA 0 : Построение эпюр изгибающих моментов и поперечных сил. Балка имеет три участка. Проводим на каждом участке сечение на расстоянии z от начала участка. Из условия равновесия отсеченной части определяем поперечные силы и изгибающие моменты. 1 участок 0 z1 a b 2 м Q1 RA z1 0 Q1 -13,333 кН z1 2 м Q1 -13,333 кН M 1 RA z1 13,333 z1 z 0 M 0,0 кНм 1 1 z1 2 м 2 участок 0 z2 с 1 м Q2 RA q z 2 13,333 10 z 2 M 1 -26,667 кНм z2 0 z2 1 Q2 -13,333 кН Q2 -3,333 кН м z22 2 z22 13,333 (ё 1 z 2 ) 20 10 2 м M 2 RA (a b z 2 ) M q 16 z2 0 M 2 -6,667 кНм z2 1 M 2 -15,0 кНм 3 участок Q3 P 0 z3 d 1 м z3 0 z3 1 м M 3 P z3 15 z3 Q3 15,0 кН Q3 15,0 кН z3 0 M 3 0 кНм z3 1 м M 3 -15,0 кНм Подбор размеров поперечного сечения. По построенной эпюре M x определяем максимальный расчетный изгибающий момент M max 26,667 кНм. Требуемый момент сопротивления сечения находим из условия M прочности max max [] : Wx M 26,667·103 Wx x max =88,889·10-6 м3=88,889 см3. 6 [] 300·10 Прямогольное сечение с отношением сторон h / b 1,75 b h 2 b (1,75b) 2 Wx 0,510b3 , 6 6 Wx 88,889 d 3 3 5,59 см. 0,510 0,510 Принимаем с округлением b 5,6 см, h 1,75 5,6 9,8 см. 17 Список использованных источников 1. К.В. Фролов, С.А. Попов, А.К. Мусатов и др. Теория механизмов и механика машин. - М.: Высш. шк., 2005.-496 с. 2. С.А. Попов, Г.А. Тимофеев. Курсовое проектирование по теории механизмов и механике машин. – М.: Высш. шк., 2002. 411с. 3. Теория механизмов и машин, изд.3 переработанное и дополненное, под ред. И.И.Артоболевский. Изд. «Наука» главная редакция физико-математической литературы . М.: 1975 г. 18