Московский государственный технический университет имени Н.Э. Баумана
Факультет «Специальное машиностроение»
Кафедра СМ9 «Многоцелевые гусеничные машины и мобильные роботы»
ОТЧЕТ
по домашней работе
по курсу «Теория движения гусеничных машин и мобильных роботов»
На тему «Тягово-динамический расчет при прямолинейном движении»
Выполнил:
Студент группы СМ9-71
Новиков А. Д.
личная подпись
ФИО студента
Проверил:
Преподаватель
Чудаков О.И.
личная подпись
Москва 2023
ФИО преподавателя
Содержание
Перечень сокращений и обозначений ........................................................................... 3
Введение ........................................................................................................................... 5
Подбор двигателя ............................................................................................................ 6
Определение минимальной скорости движения гусеничной машины ...................... 7
Определение кинематического диапазона и передаточных чисел ............................. 8
Построение динамической характеристики и характеристики ускорений ............... 9
Время и путь разгона..................................................................................................... 11
Заключение ..................................................................................................................... 13
Приложение А ................................................................................................................ 14
2
Перечень сокращений и обозначений
В настоящем отчете применяют следующие сокращения и обозначения:
ГМ − гусеничная машина
𝑚гм − масса гусеничной машины
𝑁св − максимальная свободная мощность двигателя
𝑃дв − потребная сила тяги
𝑣𝑚𝑎𝑥 − максимальная скорость ГМ
𝜂0 − общий КПД машины
𝑓0 − суммарный коэффициент сопротивления движению
𝐺 − вес машины
𝑃𝑤 − сила воздушного сопротивления
𝑓𝑚𝑖𝑛 − коэффициент сопротивления движению для дороги с хорошим покрытием
𝛼𝑚𝑖𝑛 − продольный уклон дороги при хороших дорожных условиях
𝜂тр − КПД трансмиссии
𝜂гд − КПД гусеничного движителя
𝜂к − КПД конической передачи
𝜂ц − КПД цилиндрической передачи
𝑐𝑥 − коэффициент полной аэродинамической силы
𝐹лоб − площадь миделева сечения (лобовая)
𝜌𝑤 − плотность воздуха
𝑁𝑒𝑚𝑎𝑥 − эффективная номинальная мощность двигателя
𝑁п − суммарные потери мощности в энергетической установке
𝑁в − потери на привод вентилятора
𝑁вых − потери на выхлопную систему
𝑁во − потери на воздухоочиститель
𝑣𝑚𝑖𝑛 − минимальная скорость ГМ
𝑃𝑚𝑎𝑥 − максимальная потребная сила тяги
𝑓0𝑚𝑎𝑥 − суммарный коэффициент сопротивления движению при минимальной
скорости ГМ
𝑓𝑚𝑎𝑥 − коэффициент сопротивления движению для дороги с плохим покрытием
3
𝛼𝑚𝑎𝑥 − максимальный угол подъема
𝜂0′ − общий КПД машины на первой передаче
′
𝜂гд
− КПД гусеничного движителя при движении на первой передаче
𝑃𝜑𝑚𝑎𝑥 − максимальная сила тяги по сцеплению
𝜑 − коэффициент сцепления
𝑑 − кинематический диапазон трансмиссии
𝑢тр𝑚𝑖𝑛 − минимальное передаточное число трансмиссии
𝜔дв𝑁 − угловая скорость коленчатого вала ДВС при максимальной мощности
𝑟вк − радиус ведущего колеса
𝑘𝑚𝑖𝑛 − минимальное число передач
𝑘 − итоговое число передач
𝑞геом − знаменатель геометрической прогрессии
𝐷 − динамический фактор
𝑎гм − линейное ускорение ГМ
𝛿вр − коэффициент учета вращающихся масс
𝑣гм − среднее значение скорости
𝑎гм − среднее значение ускорения
∆𝑡разг − элементарное время разгона
∆𝑆разг − элементарный путь разгона
𝑡разг − полное время разгона
𝑆разг − полный путь разгона
𝑃с выб − сила сопротивления выбегу
𝑡пер − время переключения
∆𝑣гм − падение скорости за время переключения
𝑆пер − путь, проходимый ГМ за время переключения
4
Введение
Основной целью данной работы является проведение тягово-динамического расчета
при прямолинейном движении гусеничной машины со следующими параметрами и
характеристикой дороги:
Таблица 1 – Исходные данные
𝑚гм , т
𝛼𝑚𝑎𝑥 , град
𝑣𝑚𝑎𝑥 , км/ч
20
35
70
𝐹лоб , м2 𝑟вк , м Прим.
3,6
0,25
1, 4
𝜑
𝑓𝑚𝑖𝑛
𝑓𝑚𝑎𝑥
0,85
0,02
0,08
Трансмиссия ГМ на любой передаче включает одну пару конических прямозубых
шестерён, три пары цилиндрических прямозубых шестерён и одну планетарную передачу,
а разработка расчетных скоростей движения на передачах осуществляется по закону
геометрической прогрессии.
Тяговым расчетом называется расчет, согласно которому определяются скоростные
и тяговые качества существующей гусеничной машины (поверочный) или расчет, когда
по заданным скоростным и тяговым качествам определяются расчетные параметры
проектируемой машины (проектировочный). Мы выполняем проектировочный расчет,
который выполняется в следующей последовательности:
1)
По заданной массе ГМ и его максимальной скорости движения находим
мощность двигателя.
2)
По заданному максимальному углу преодолеваемого подъема вычисляем
минимальную скорость движения ГМ.
3)
Зная максимальную и минимальную скорости, определяем кинематический
диапазон трансмиссии.
4)
По расчетным скоростям определяем передаточные числа трансмиссии.
5)
С помощью полученных выше данных строим зависимости скорости и пути
разгона ГМ от времени.
В отчете представлены программная реализация в среде Matlab, результаты
представлены в численном и графическом виде.
5
Подбор двигателя
Мощность двигателя определяют из условия прямолинейного движения машины с
максимальной скоростью по хорошей дороге с незначительными уклонами.
Максимальная
свободная
мощность
без
внутренних
потерь
определяется
следующим образом:
𝑁св =
𝑃дв 𝑣𝑚𝑎𝑥
= 349 кВт
𝜂0
Потребная сила тяги:
𝑃дв = 𝑓0 𝐺 + 𝑃в = 9809 Н
Это сила, которую двигатель должен обеспечить на гусеницы для того, чтобы
развить максимальную скорость при заданных внешних условиях.
Суммарный коэффициент сопротивления движению:
𝑓0 = 𝑓𝑚𝑖𝑛 𝑐𝑜𝑠𝛼𝑚𝑖𝑛 + 𝑠𝑖𝑛𝛼𝑚𝑖𝑛 = 0,0462
Здесь суммарный коэффициент сопротивления движению представляет собой
коэффициент при хороших дорожных условиях, когда ГМ может развить максимальную
скорость.
Поэтому
в
данном
выражении
берется
минимальный
коэффициент
сопротивления движению и малый угол подъема (~1,5°).
Общий КПД машины:
𝜂0 = 𝜂тр 𝜂гд = 0,5463
КПД трансмиссии:
𝜂тр = 𝜂к 𝜂ц3 𝜂п = 0,841
Исходя из технического задания, мы имеем одну пару конических прямозубых
шестерён, три пары цилиндрических прямозубых шестерён и одну планетарную передачу.
КПД гусеничного движителя для резинометаллического шарнира:
𝜂гд = 0,919 − 0,01386 ∗ 𝑣гм = 0,6495
В данной формуле вместо 𝑣гм подставляется максимальная скорость движения
машины 𝑣𝑚𝑎𝑥 .
Сила воздушного сопротивления:
2
𝑃в = 0,5 ∗ 𝑐𝑥 𝐹 лоб 𝜌𝑤 𝑣гм
= 831 Н
где 𝑐𝑥 = 0,9;
6
𝜌𝑤 = 1,225 кг/м3 .
Силу воздушного сопротивления необходимо учитывать, так как максимальная
скорость ГМ ≥ 40 км/ч.
Эффективная номинальная мощность двигателя:
𝑁𝑒𝑚𝑎𝑥 = 𝑁св + 𝑁п
Это мощность, которая учитывает потери на потребители
Суммарные потери мощности в энергетической установке:
𝑁п = 𝑁в + 𝑁вых + 𝑁во
Будем считать, что потери мощности составляют 15,5 % от 𝑁𝑒𝑚𝑎𝑥 , тогда формула
будет иметь следующий вид:
𝑁св
= 413,2 кВт
0.845
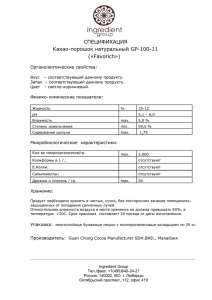
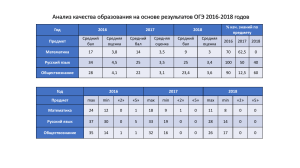
Исходя из необходимой для достижения максимальной скорости эффективной
𝑁𝑒𝑚𝑎𝑥 =
мощности был выбран двигатель В-55В.
Внешняя скоростная характеристика двигателя показана на рисунке 1.
Рисунок 1 – Внешняя скоростная характеристика двигателя
Определение минимальной скорости движения гусеничной машины
Минимальная скорость движения определяется из условий равномерного движения
ГМ на максимальном подъеме при выбранном двигателе:
7
𝑣𝑚𝑖𝑛
𝑁св 𝜂0′
=
= 2,25 м/с
𝑃𝑚𝑎𝑥
Максимальная потребная сила тяги для подъема машины:
𝑃𝑚𝑎𝑥 = 𝑓0𝑚𝑎𝑥 𝐺 = 𝐺(𝑓𝑚𝑎𝑥 𝑐𝑜𝑠𝛼𝑚𝑎𝑥 + 𝑠𝑖𝑛𝛼𝑚𝑎𝑥 ) = 126 кН
В данном случае максимальная потребная сила тяги представляет собой силу,
которую двигатель должен обеспечить на гусенице для преодоления максимального угла
подъема и при максимальном сопротивлении движению.
КПД на первой передаче:
′
𝜂0′ = 𝜂тр 𝜂гд
= 0,773
КПД движителя на первой передаче:
′
𝜂гд
= 0,919
𝑣𝑚𝑖𝑛 = 8 км/ч
Проверка по сцеплению
Максимальная сила тяги по сцеплению:
𝑃𝜑𝑚𝑎𝑥 = 𝜑𝐺𝑐𝑜𝑠𝛼𝑚𝑎𝑥 = 136 кН
Максимальная потребная сила тяги 𝑃𝑚𝑎𝑥 не должна превышать максимальную силу
тяги по сцеплению 𝑃𝜑𝑚𝑎𝑥 . В нашем случае 𝑃𝑚𝑎𝑥 = 126 кН, а 𝑃𝜑𝑚𝑎𝑥 = 136 кН,
следовательно, проверка по сцеплению пройдена.
Определение кинематического диапазона и передаточных чисел
Кинематический диапазон трансмиссии:
𝑣𝑚𝑎𝑥 𝑢тр𝑚𝑎𝑥
𝑑=
=
= 8,75
𝑣𝑚𝑖𝑛 𝑢тр𝑚𝑖𝑛
При разбивке передаточных чисел по закону геометрической прогрессии
минимальное число передач определяется следующим образом:
𝑘𝑚𝑖𝑛 =
𝑙𝑔 𝑑
= 6,7
𝑙𝑔 𝑛𝑁 − 𝑙𝑔 𝑛𝑀
Минимальное число передач получилось 𝑘𝑚𝑖𝑛 = 6,7, округлив в большую сторону,
получили число передач 𝑘 = 7.
Знаменатель геометрической прогрессии:
𝑞геом =
𝑘−1
√𝑑 = 1,4325
8
Значение передаточного отношения для достижения наибольшей скорости:
𝑢тр (𝑘) =
𝑟вк 𝑛𝑚𝑎𝑥 𝜋
30𝑣𝑚𝑎𝑥
= 2,56
После нахождения передаточного отношения на последней передаче, мы
используем геометрическую прогрессию для нахождения передаточных отношений на
других передачах:
qгеом =
uтр (i + 1)
uтр (i)
Таблица 2 – Передаточные отношения трансмиссии на разных передачах
Передача (i)
Передаточное отношение (𝑢тр𝑖 )
1-ая
22,110
2-ая
15,434
3-ая
10,774
4-ая
7,521
5-ая
5,248
6-ая
3,665
7-ая
2,558
Построение динамической характеристики и характеристики ускорений
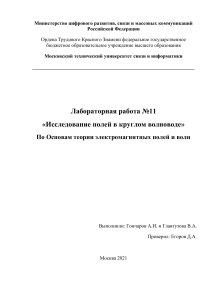
Динамический фактор:
𝐷=
𝑃дв − 𝑃в
𝐺
Для построения динамической характеристики необходимо считать динамический
фактор в двойном цикле, где первым циклом является смена передачи, а вторым
изменение частоты вращения двигателя в рабочем диапазоне от 𝑁𝑚𝑎𝑥 до 𝑀𝑚𝑎𝑥 .
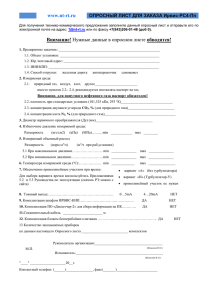
Сила тяги по двигателю:
𝑃дв =
𝑀св 𝑢тр 𝜂0
𝑟вк
9
Рисунок 2 - Динамическая характеристика
Анализируя график динамической характеристики (рисунок 2) можно получить
скорость движения ГМ (при равномерном движении) при заданном коэффициенте общего
сопротивления.
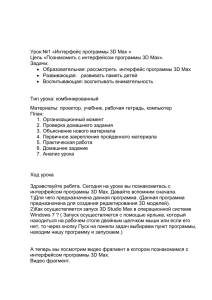
Линейное ускорение ГМ:
𝑎гм =
(𝐷 − 𝑓0 )𝑔
𝛿вр
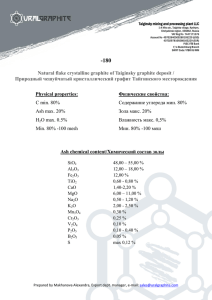
Для построения характеристики ускорений необходим такой же цикл, как и при
построении Динамической характеристики.
Коэффициент учета вращающихся масс:
2
𝛿вр ≈ 1,2 + 0.002 ∗ 𝑢тр
10
Рисунок 3 - Характеристика ускорений ГМ
Анализируя график характеристики ускорений можно получить теоретическое
значение ускорения разгона на данном грунте при данной скорости.
Время и путь разгона
Разобьем характеристику ускорений на элементарные участки с определенным
интервалом:
∆𝑣гм = 𝑣 гм(𝑖+1) − 𝑣гм(𝑖)
На полученных интервалах определим средние значения ускорения:
𝑎гм = 0,5(𝑎гм𝑖 + 𝑎гм(𝑖+1) )
И средние значения скорости:
𝑣гм = 0.5(𝑣гм𝑖 + 𝑣гм(𝑖+1) )
Найдем элементарные время и путь разгона:
∆𝑡разг =
∆𝑣гм
𝑎гм
∆𝑆разг = ∆𝑣гм ∆𝑡разг
Полное время разгона:
𝑝
𝑡разг = ∑ ∆𝑡разг
𝑖=1
Путь разгона:
11
𝑝
𝑆разг = ∑ ∆𝑆разг
𝑖=1
𝑝 − число элементарных участков
Замедление при переключении передач:
𝑎гм = −
𝑃с выб
𝑚гм 𝛿вр
Сила сопротивления выбегу:
𝑃с выб = 𝐺𝑓0 + 𝑃в
Падение скорости за время переключения:
∆𝑣пер =
𝑃с выб 𝑡пер
𝑚гм 𝛿вр
Путь, проходимый ГМ за время переключения:
′
𝑆пер = (𝑣пер
− 0,5∆𝑣пер )𝑡пер
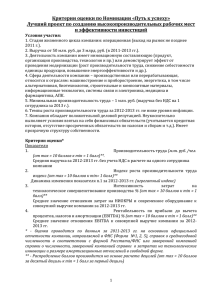
Время переключения 𝑡пер = 1 с.
Рисунок 4 - График времени разгона ГМ
12
Рисунок 5 - График пути разгона Г
Заключение
В ходе выполнения тягово-динамического расчета для заданной исходной ГМ был
подобран двигатель В55-В, получены передаточные отношения трансмиссии, определена
минимальная
скорость
движения,
построены
динамическая
характеристика,
характеристика ускорений, графики времени разгона и пути разгона.
Таблица 3 – Время разгона на каждой передаче до максимальных оборотов
t1, c
t2, c
t3, c
t4, c
t5, c
t6, c
t7, c
0,328
2,370
4,886
8,505
14,918
29,788
90,133
Таблица 4 – Расстояние, которое прошла машина за время разгона на каждой передаче
s1, м
s2, м
s3, м
s4, м
s5, м
s6, c
s7, c
0,63
4,24
11,3
27,7
74
238
1252
13
Приложение А
Расчетный файл для ПО Matlab R2021b
clear all; %#ok<CLALL>
% Входные данные из варианта дз.
m = 20000; % Масса ТС, кг.
alpha_max = 35; % Максимальный угол преодолеваемого подъема, в градусах.
V_max = 70; % Максимальная скорость ТС на хорошей дороге, км/ч.
F_lob = 3.6; % Площадь поперечного (миделева) сечения, м^2. Может быть вычислена как
% F_lob = (H - h) * B, где H - габаритная высота, B - колея ТМ, h - дорожный клиренс, всё в метрах.
r_vk = 0.25; % Радиус ведущего колеса, м.
prim = [1 ,4]; % Примечание из условия, см. ниже.
% Дополнительные данные из условия.
phi = 0.85;
f_min = 0.02; % Коэффициент сопротивления движению, обычно 0,015…0,025 для дороги с покрытием.
f_max = 0.085;
alpha_min = 1.5; %Значение продольного уклона на хорошей дороге, в градусах, обычно 1..1.5.
g = 9.81; % Ускорение свободного падения, м/с^2.
Ro_w = 1.225; % Плотность воздуха, кг/м^3.
C_x = 0.9; % Коэффициент полной аэродинамической силы, для грузовых обычно 0.8..1.0.
Nu_k = 0.96; % КПД конической передачи.
Nu_c = 0.97; % КПД цилиндрической передачи.
Nu_p = 0.96; % КПД планетарной одноступенчатой (эпициклической?) передачи.
% Параметры двигателя В-55В.
n = [1200, 1300, 1400, 1500, 1600, 1700, 1800, 1900, 2000]; % Частота вращения двигателя, об/мин.
M_ef = [2354, 2354, 2345.5, 2323.2, 2291.8, 2256, 2207.4, 2139.5, 2060];
N_ef = [295.81, 320.46, 343.87, 364.93, 384, 401.62, 416.09, 425.7, 431.45];
N_max = max(N_ef); % Максимальная эффективная мощность двигателя.
M_max = max(M_ef); % Максимальный эффективный крутящий момент.
% Расчет мощности двигателя.
G = m * g; % Вес ТС, Н.
f_0 = f_min * cosd(alpha_min) + sind(alpha_min); % Суммарный (обобщенный) коэффициент сопротивления движению.
P_v = 0.5 * C_x * F_lob * Ro_w * ((V_max/3.6) ^ 2); % Сила воздушного сопротивления, Н.
P_dv = (f_0 * G) + P_v; % Потребная сила тяги, Н.
if prim(1) == 1
Nu_tr = Nu_k * (Nu_c^3) * Nu_p; % КПД трансмиссии (для современных ГМ с механической трансмиссией
примерно 0,85…0,9).
elseif prim(1) == 2
Nu_tr = Nu_k * (Nu_c^2);
else
Nu_tr = (Nu_c^3) * Nu_p;
end
% Расчет КПД машины.
Nu_gd = 0.919 - 0.01386 * (V_max/3.6); % КПД гусеничной передачи для резинометаллического шарнира.
Nu_0 = Nu_tr * Nu_gd; % Общий КПД машины.
N_cv = (P_dv * V_max/3.6) / Nu_0; % Максимальная свободная мощность двигателя (без внутренних потерь), Вт.
% Примерный расчет без зависимости от частоты вращения для выбора двигателя.
N_vent = 0.1; % Потери на привод вентилятора (0,06…0,15 от N_e_max).
N_vix = 0.025; % Потери на выхлопную систему (0,02…0,03 от N_e_max).
N_vozd = 0.03; % Потери на воздухоочиститель (0,02…0,04 от N_e_max).
N_p = N_vent + N_vix + N_vozd; % Суммарные потери мощности в энергетической установке.
N_e_max = (N_cv / 1000) / (1 - N_p); % Эффективная номинальная мощность двигателя, кВт.
% Расчет свободной мощности двигателя по ВСХ с учетом потерь.
N_p_N = 0.15 * N_max; % Общие потери мощности в режиме максимальной мощности (0,1…0,2 от N_max), кВт.
N_p = zeros(1, length(n));
i = 0;
for n_i = n
i = i + 1;
N_p(i) = N_p_N * (n_i / max(n))^2; % Суммарные потери мощности в зависимости от частоты вентилятора.
end
N_cv = N_ef - N_p; % Эффективная мощность двигателя, кВт.
omega_dv = n * 2 * pi / 60; % Угловая скорость вращения коленчатого вала ДВС, 1/с.
M_cv = (1000 * N_cv) ./ omega_dv; % Эффективный крутящий момент двигателя, Н * м.
14
n_M_max = min(n(M_cv == max(M_cv))); % Частота вращения двигателя при максимальном моменте, выбирается
максимально слева.
n_N_max = max(n(N_cv == max(N_cv))); % Частота вращения двигателя при максимальной мощности.
% Выбирается максимально справа, для расширения рабочего диапазона двигателя в случае т.н 'плато' на графике
ВСХ.
omega_dv_N = n_N_max * 2 * pi / 60; % Скорость вращения двигателя при максимальной мощности.
% Определение минимальной скорости ТС:
Nu_gd_shtrikh = 0.919;
Nu_0_shtrikh = Nu_tr * Nu_gd_shtrikh; % КПД ТС при минимальной скорости.
f_0_max = f_max * cosd(alpha_max) + sind(alpha_max);
P_max = f_0_max * G; % Максимальная потребная сила тяги, Н.
P_max_phi = phi * G * cosd(alpha_max); % Максимальная сила тяги по сцеплению, Н.
if P_max > P_max_phi
disp("Максимальная потребная сила тяги P_max не должна превышать максимальную силу тяги по сцеплению:
P_max <= P_max_phi")
end
P_max = min(P_max_phi, P_max);
V_min = 3.6 * max(N_cv) * 1000 * Nu_0_shtrikh / P_max; % Желательно, чтобы наибольшая скорость на первой
передаче не превышала 5…6 км/ч.
% Определение кинематического диапазона трансмиссии:
d = V_max / V_min; % = u_tr_max / u_tr_min
% Для ГМ с максимальной скоростью движения 50…55 км/ч обычно кинематический диапазон d = 8…10.
u_tr_min = omega_dv_N * r_vk / (V_max / 3.6);
u_tr_max = d * u_tr_min;
% Выбор передаточных чисел КП:
if prim(2) == 5
k_min = (d - 1)/((n_N_max / n_M_max) - 1); % Берется без +1 - т.к не учитывем заднюю передачу.
k = ceil(k_min); % Число передач k определяется округлением в большую сторону k_min до ближайшего целого
числа.
q_arif = (u_tr_min - u_tr_max)/(k - 1); % Разность арифметической прогрессии;
u_tr = zeros(1, k);
u_tr(1) = u_tr_min;
for i = 2:k
u_tr(i) = u_tr(i-1) + q_arif;
%u_1 - u_2 = … = u_k-1 - u_k = q_arif = const;
end
elseif prim(2) == 4
k_min =(log(d) / (log(n_N_max) - log(n_M_max))); % Берется без +1 - т.к не учитывем заднюю передачу.
k = ceil(k_min); % Функция log() возвращает натуральный логарифм, ceil() возвращает округленное в большую
сторону значение.
q_geom = nthroot(d, k-1); % Разность геометрической прогрессии;
u_tr = zeros(1, k);
u_tr(1) = u_tr_min;
for i = 2:k
u_tr(i) = u_tr(i-1) * q_geom;
%u_i / u_i-1 = q_geom = const;
end
else
disp('Ошибка: Соответствующее примечание не найдено');
end
% Динамическая характеристика и ускорения ТС, путь и скорость разгона ТС:
f2 = figure('Name', 'Динамическая характеристика', 'NumberTitle', 'off');
hold on;
grid on;
xlabel('Скорость ТС, км/ч');
xlim([0, 1.1*V_max]); % Границы на горизонтальной оси.
ylabel('Динамический фактор');
ylim([0, 1]); % Границы осей на левой оси.
title('Динамическая характеристика');
f3 = figure('Name', 'Ускорения ТС', 'NumberTitle', 'off');
hold on;
grid on;
xlabel('Скорость ТС, км/ч');
xlim([0, 1.1*V_max]); % Границы на горизонтальной оси.
15
ylabel('Ускорения ТС на каждой передаче, м/с^{2}');
ylim([0, 3.5]); % Границы осей на левой оси.
title('Характеристика ускорений ГМ');
t_per = 1.5; % Время переключения, обычно 1..2 с.
a_gm = zeros (k, length(n));
V = zeros (k, length(n));
for i = k:-1:1
V(i,:) = omega_dv * r_vk / u_tr(i); % Текущая скорость ТС для каждой частоты вращения двигателя, м/с.
% Индексация через (i,:) выдает в качестве результата i-ую строчку массивом 1 x n.
Nu_gd = 0.919 - 0.01386 * V(i,:); % КПД гусеничного движителя при текущей скорости.
Nu_0 = Nu_tr * Nu_gd; % Полный КПД машины.
P_v = 0.5 * C_x * F_lob * Ro_w * (V(i,:) .^ 2); % Сила сопротивления при текущей скорости, Н.
P_dv = M_cv * u_tr(i) * Nu_0(i) / r_vk; % Сила тяги по двигателю, Н.
D = (P_dv - P_v) / G; % Динамический фактор.
% График динамического фактора на i-ой передаче:
figure(f2);
plot(V(i,:) * 3.6, D);
sigma_vr = 1.2 + 0.002 * (u_tr(i)^2); % Коэффициент учета вращающихся масс.
a_gm(i,:) = (D - f_0) * g / sigma_vr; % Линейное ускорение машины, м/с^2.
% График ускорения ТС на i-ой передаче:
figure(f3);
plot(V(i,:) * 3.6, a_gm(i,:));
%Расчет времени и пути разгона ТС:
for j =1:(length(n)-1)
Delta_v(i,j) = V(i,j+1) - V(i,j); % Изменение скорости между двумя соседними частотами вращения двигателя.
a_sr(i,j) = 0.5 * (a_gm(i,j+1) + a_gm(i,j)); % Среднее ускорение на этом участке.
v_sr(i,j) = 0.5 * (V(i,j+1) + V(i,j)); % Средняя скорость на участке.
Delta_t(i,j) = Delta_v(i) / a_gm(i,j); % Элементарное время разгона на участке.
Delta_s(i,j) = v_sr(i,j) * Delta_t(i,j); % Элементарный путь разгона на участке.
end
T_razg(i) = sum(Delta_t(i,:),"all"); % Полное время разгона на данной передаче.
S_razg(i) = sum(Delta_s(i,:),"all"); % Полный путь разгона на данной передаче.
P_v = 0.5 * C_x * F_lob * Ro_w * (max(V(i,:)) ^ 2); % Сопротивление воздуха для скорости переключения.
P_c_vibeg = G * f_0 + P_v; % Сила сопротивления выбегу.
a_zamedl = -P_c_vibeg / (m * sigma_vr); % Замедление при переключении передач.
Delta_v_per(i) = P_c_vibeg * t_per / (m * sigma_vr); % Падение скорости за время переключения.
S_per(i) = max(V(i,:)) - 0.5 * Delta_v_per(i) * t_per; % Путь, проходимый ТС за время переключения.
end
% Определение времени и пути разгона ТС.
V_gm = zeros (1, 2*k-1);
S_gm = zeros (1, 2*k-1);
T_gm = zeros (1, 2*k-1);
for j = 0:(k-1)
V_gm(1,2*j+2) = max(V(k - j,:));
end
for j = 0:(k-2)
V_gm(1,2*j+3) = max(V(k - j,:)) - Delta_v_per(1,k - j);
S_gm(1,2*j+3) = S_gm(1,2*j + 1) + S_razg(1,k - j) + S_per(1,k - j);
T_gm(1,2*j+3) = T_gm(1,2*j + 1) + T_razg(1,k - j) + t_per;
end
for j = 0:(k-1)
S_gm(1,2*j+2) = S_gm(1,2*j + 1) + S_razg(1,k - j);
T_gm(1,2*j+2) = T_gm(1,2*j + 1) + T_razg(1,k - j);
end
16