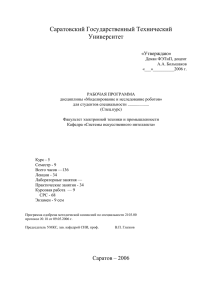
Е. И. Юревич Санкт-Петербург «БХВ-Петербург» 2017 УДК 681.5(075.8) ББК 32.816я73 Ю68 Юревич Е. И. Ю68 Основы робототехники: учеб. пособие. — 4-е изд., перераб. и доп. — СПб.: БХВ-Петербург, 2017. — 304 с.: ил. — (Учебная литература для вузов) ISBN 978-5-9775-3851-0 Рассмотрены история становления робототехники как современной отрасли науки и техники от первых попыток создания "механических людей" до современных роботов всех размерностей и перспективы ее дальнейшего развития. Описано устройство роботов и других близких им средств робототехники, способы управления роботами от программного до интеллектуального, принципы проектирования. Широко представлено применение роботов в различных областях человеческой деятельности. В четвертом издании книги учтены последние достижения стремительно развивающейся робототехники, включая микроробототехнику, искусственный интеллект, космическую робототехнику и др. Книга снабжена электронным архивом с динамическими иллюстрациями и комментариями автора, который можно скачать с сайта издательства. Для студентов технических вузов, разработчиков роботов и их пользователей УДК 681.5(075.8) ББК 32.816я73 Группа подготовки издания: Главный редактор Зав. редакцией Компьютерная верстка Корректор Дизайн серии Оформление обложки Фото Екатерина Кондукова Екатерина Капалыгина Ольги Сергиенко Зинаида Дмитриева Инны Тачиной Марины Дамбиевой Кирилла Сергеева Р е ц е н з е н т ы: В. М. Лохин, д-р техн. наук, проф. кафедры «Проблемы управления» МИРЭА; О. А. Тягунов, канд. техн. наук, доцент кафедры «Проблемы управления» МИРЭА; А. М. Потапов, д-р техн. наук, проф., заслуженный деятель науки и техники РФ. "БХВ-Петербург", 191036, Санкт-Петербург, Гончарная ул., 20. ISBN 978-5-9775-3851-0 © Юревич Е. И., 2017 © Оформление. ООО "БХВ-Петербург", 2017 ОГЛАВЛЕНИЕ Предисловие ..................................................................................................................... 1 Введение ............................................................................................................................ 3 Глава 1. История развития робототехники................................................................ 5 1.1. Предыстория робототехники ................................................................................................... 5 1.2. Возникновение и развитие современной робототехники ...................................................... 7 1.3. Развитие отечественной робототехники ............................................................................... 13 Глава 2. Управление движениями человека ........................................................... 17 2.1. Постановка задачи .................................................................................................................. 17 2.2. Общая схема управления движением человека ................................................................... 17 Нейроны.................................................................................................................................. 18 Мышцы ................................................................................................................................... 20 Рецепторы ............................................................................................................................... 22 Центральная нервная система ............................................................................................... 22 2.3. Динамические уровни управления движением .................................................................... 28 Рефлекторное управление отдельным суставом ................................................................. 28 Рефлекторное связанное управление несколькими звеньями конечностей тела ............. 30 Управление с использованием внешней информации ........................................................ 31 2.4. Тактический уровень управления движением ...................................................................... 33 2.5. Стратегический уровень управления движением ................................................................ 34 2.6. Интеллект и творчество ......................................................................................................... 36 Глава 3. Устройство роботов ...................................................................................... 41 3.1. Состав, параметры и классификация роботов ...................................................................... 41 3.1.1. Состав роботов ............................................................................................................. 41 3.1.2. Классификация роботов .............................................................................................. 41 По назначению ............................................................................................................. 41 По техническим показателям ..................................................................................... 42 По управлению............................................................................................................. 43 IV Оглавление 3.2. Манипуляционные системы................................................................................................... 44 3.2.1. Разомкнутые кинематические цепи из жестких звеньев .......................................... 45 3.2.2. Кинематические цепи, включающие параллельно соединенные звенья................. 48 3.2.3. Кинематические схемы с управляемой деформацией .............................................. 53 3.2.4. Манипуляционные системы без подвижных частей ................................................. 54 3.3. Рабочие органы манипуляторов ............................................................................................55 3.3.1. Захватные устройства ..................................................................................................55 3.3.2. Рабочий инструмент ....................................................................................................58 3.4. Системы передвижения мобильных роботов ....................................................................... 58 3.5. Сенсорные системы ................................................................................................................ 67 3.5.1. Дальность действия сенсорных систем...................................................................... 68 3.5.2. Системы технического зрения .................................................................................... 69 3.6. Способы и устройства управления робототехническими системами ................................ 73 3.7. Особенности устройства других средств робототехники ................................................... 74 Глава 4. Приводы роботов........................................................................................... 77 4.1. Классификация приводов ....................................................................................................... 77 4.2. Пневматические приводы ...................................................................................................... 78 4.3. Гидравлические приводы ....................................................................................................... 82 4.4. Электрические приводы ......................................................................................................... 83 4.5. Рекуперация энергии в приводах ..........................................................................................84 4.6. Искусственные мышцы .......................................................................................................... 85 4.7. Микроприводы ........................................................................................................................ 87 Глава 5. Математическое описание роботов ........................................................... 89 5.1. Основные принципы организации движения роботов ........................................................ 89 5.2. Математическое описание манипуляторов .......................................................................... 91 5.2.1. Математическое описание механической системы манипуляторов........................ 92 5.2.2. Взаимное влияние степеней подвижности манипуляторов...................................... 99 5.2.3. Учет упругости звеньев манипулятора .................................................................... 102 5.2.4. Математическое описание приводов ....................................................................... 105 5.2.5. Математическое описание манипулятора с приводами ......................................... 106 5.3. Математическое описание систем передвижения роботов ............................................... 108 5.4. Математическое описание человека-оператора ................................................................. 108 5.5. Компьютерное моделирование робототехнических систем ............................................. 110 Глава 6. Дискретное цикловое программное управление роботами ................ 113 6.1. Особенности цикловых систем управления роботов ......................................................... 113 6.2. Цикловое управление отдельным приводом ...................................................................... 114 6.3. Совместное цикловое управление приводами манипуляторов......................................... 115 6.4. Резонансные цикловые приводы ......................................................................................... 117 Оглавление V Глава 7. Дискретное позиционное программное управление роботами .......... 119 7.1. Особенности дискретного позиционного управления ....................................................... 119 7.2. Дискретное позиционное управление отдельным приводом ............................................ 120 7.3. Совместное дискретное позиционное управление приводами манипулятора ................ 126 7.4. Общий порядок исследования динамики и синтеза алгоритмов дискретного позиционного программного управления.................................................................................. 128 Глава 8. Непрерывное программное управление роботами............................... 131 8.1. Особенности непрерывного управления роботами ........................................................... 131 8.2. Непрерывное управление отдельным приводом ................................................................ 134 8.2.1. Непрерывное управление приводом с последовательной коррекцией ................. 135 8.2.2. Непрерывное управление приводом с коррекцией с помощью обратных связей ................................................................................................................... 135 8.3. Робастные системы непрерывного управления приводов ................................................ 137 8.3.1. Системы непрерывного управления с обратной связью по ускорению ................ 138 8.3.2. Релейные системы управления ................................................................................. 141 8.4. Совместное непрерывное управление приводами манипулятора .................................... 143 8.4.1. Системы совместного непрерывного управления приводами манипулятора с последовательной коррекцией (с компенсатором) ........................................................ 144 8.4.2. Системы совместного управления приводами манипулятора с динамической коррекцией с помощью обратных связей .............................................. 148 8.5. Системы управления манипулятором совместно по положению и силе ......................... 151 8.5.1. Позиционно-силовое управление по абсолютным степеням подвижности рабочего органа, т. е. по xp и Qp .......................................................................................... 151 8.5.2. Позиционно-силовое управление по относительным степеням подвижности, т. е. по q и Qд ........................................................................................................................ 153 8.5.3. Комбинированное позиционно-силовое управление по абсолютным и относительным степеням подвижности .............................................. 153 Глава 9. Адаптивное и интеллектуальное управление роботами ..................... 159 9.1. Функциональная схема системы сенсорного (очувствленного) управления роботов .... 159 9.2. Системы адаптивного управления ...................................................................................... 161 9.2.1. Адаптивное управление отдельным приводом ....................................................... 163 9.2.2. Адаптивное управление манипулятором ................................................................. 163 9.3. Системы интеллектуального управления ........................................................................... 166 9.3.1. Управление на основе экспертных систем .............................................................. 170 9.3.2. Управление на основе нечеткой логики................................................................... 172 9.3.3. Управление на основе ассоциативной памяти ........................................................ 174 9.3.4. Управление на основе нейросетевых структур ....................................................... 176 9.3.5. Понятие об искусственном разуме и разумных роботах ........................................ 178 9.4. Особенности управления средствами передвижения роботов.......................................... 180 VI Оглавление Глава 10. Управление средствами робототехники человеком-оператором .... 183 10.1. Человеко-машинные системы ........................................................................................... 183 10.2. Классификация систем управления средствами робототехники человеком-оператором ................................................................................................................ 184 10.3. Системы командного управления ..................................................................................... 187 10.4. Системы копирующего управления манипулятором....................................................... 187 10.5. Системы управления с задающей рукояткой ................................................................... 191 10.6. Системы супервизорного и интерактивного управления ................................................ 193 10.7. Особенности управления человеком-оператором средствами передвижения .............. 195 Глава 11. Групповое управление в робототехнических системах ..................... 197 11.1. Задачи группового управления .......................................................................................... 197 11.2. Групповое управление в живой природе и в обществе ................................................... 197 11.3. Принципы группового управления роботами .................................................................. 200 Глава 12. АППАРАТУРА УПРАВЛЕНИЯ РОБОТОВ ........................................ 209 12.1. Развитие устройств управления роботов .......................................................................... 209 12.2. Современные устройства управления средств робототехники и тенденции их развития ............................................................................................................. 212 Глава 13. Проектирование средств робототехники.............................................. 215 13.1. Особенности проектирования средств робототехники ................................................... 215 13.2. Методы проектирования средств робототехники ............................................................ 217 Глава 14. Робототехнические системы в промышленности ............................... 221 14.1. Классификация технологических комплексов с применением роботов ........................ 221 14.2. Компоновка технологических комплексов с роботами ................................................... 224 14.3. Гибкие производственные системы .................................................................................. 227 Глава 15. Промышленные роботы на основных технологических операциях ...................................................................................................................... 231 15.1. Классификация технологических комплексов с роботами на основных технологических операциях ................................................................................. 231 15.2. Сборочные робототехнические комплексы...................................................................... 231 15.3. Сварочные робототехнические комплексы ...................................................................... 235 15.4. Робототехнические комплексы для нанесения покрытий ............................................... 238 Глава 16. Промышленные роботы на вспомогательных операциях ................ 241 16.1. Классификация роботизированных технологических комплексов ................................ 241 16.2. Роботизированные технологические комплексы механообработки .............................. 241 16.3. Роботизированные технологические комплексы штамповки и литья под давлением .............................................................................................................................. 242 Глава 17. Особенности применения средств робототехники в немашиностроительных и в непромышленных отраслях ............................... 245 17.1. Робототехника в немашиностроительных отраслях промышленности ......................... 245 17.2. Робототехника в непромышленных отраслях .................................................................. 250 Оглавление VII Глава 18. Экстремальная робототехника ............................................................... 257 18.1. Экстремальная робототехника в промышленности ......................................................... 257 18.2. Космическая робототехника ..............................................................................................261 18.3. Подводные роботы ............................................................................................................. 265 18.4. Военная робототехника ...................................................................................................... 267 Глава 19. Социально-экономические аспекты робототехники ......................... 273 19.1. Социально-экономическая эффективность применения средств робототехники ......... 273 19.2. Техника безопасности в робототехнике ........................................................................... 273 Заключение ................................................................................................................... 277 Приложение 1. Основные этапы развития движений в живой природе .......... 281 Приложение 2. Описание электронного архива .................................................... 287 Литература ................................................................................................................... 289 Предметный указатель .............................................................................................. 291 VIII Оглавление ПРЕДИСЛОВИЕ Это четвертое, доработанное издание книги «Основы робототехники», вышедшей в свет в 1985 г. в качестве первого отечественного учебника по робототехнике. В 2001 г. на ее основе для студентов СПбГПУ были изданы два учебных пособия: «Робототехника» и «Управление роботами и робототехническими системами». В 2005 и 2009 гг. на основе этих книг были осуществлены второе и третье издания учебного пособия «Основы робототехники». Настоящее издание существенно дополнено результатами, достигнутыми в быстро развивающейся робототехнике. Учебное пособие отработано на опыте преподавания одноименной дисциплины студентам кафедры «Мехатроника и робототехника» СПбПУ при Центральном научном и опытно-конструкторском институте робототехники и технической кибернетики (ЦНИИ РТК). Книга предназначена для студентов технических вузов, а также широкого круга специалистов по робототехнике и автоматизации. 2 Введение ВВЕДЕНИЕ Изначально предмет робототехники — это создание и применение роботов и других близких им средств робототехники, а также основанных на них технических систем самого различного назначения. При возникновении современной робототехники робот определялся как автоматическая машина для осуществления механических действий подобных тем, которые производит человек, выполняющий физическую работу. Именно стремление заменить человека прежде всего на тяжелых и опасных работах и породило идею робота. Однако в современной робототехнике определение робота следует существенно расширить. Роботы далеко вышли за габаритные размеры человека — это и космические и строительные манипуляторы длиной более десяти метров, и микророботы миллиметровых размеров, наземные, водные, летающие. Поэтому предмет современной робототехники — это технические аналоги объектов всего живого мира, включая, конечно, и человека. Робототехника открыла принципиально новый этап в развитии техники и цивилизации в целом. Впервые техника покусилась на освоение свойств живой природы. Что касается технического воплощения способностей человека, то здесь главная задача — это создание разумных роботов. Она связана с фундаментальной научной проблемой понимания феномена человеческого мышления, в решении которой робототехника играет роль основной экспериментальной базы. Важна роль робототехники и в техническом освоении способов передвижения живых организмов, включая, например, ползание, плавание, летание. Теоретической основой современной робототехники стала кибернетика и, прежде всего, ее раздел бионика. На рис. В.1 показана функциональная схема робота. Она включает две силовые исполнительные системы: манипуляционную (один или несколько манипуляторов — аналогов рук человека) и передвижения (транспортную); и три информационные системы: информационно-измерительную (сенсорную), дающую информацию о внешней среде, систему управления и систему связи с человеком-оператором и взаимодействующими с роботом машинами. Все эти системы имеют источник энергопитания либо в составе самого робота, либо внешний. 4 Введение Рис. В.1. Функциональная схема робота Исполнительные системы состоят из механической части (механизмов) и системы приводов. Робот как автоматическая машина не вписался в сложившуюся классификацию машин, находясь как бы над ней, — он может выполнять функции практически любой из машин в этой классификации: от технологических и транспортных до информационных. Это, как ранее отмечено, и есть принципиально новое направление создания «умных» универсальных (многофункциональных) машин. Современная робототехника потому и появилась лишь во второй половине XX столетия, что именно в это время назрела необходимость в таких универсальных машинах-роботах, без которых невозможно было начать и развернуть комплексную автоматизацию современного производства, — создание гибких автоматизированных производств. Термин «робот», как известно, ввел в 1920 г. известный писатель К. Чапек, назвавший так в своей фантастической пьесе «R.U.R.» («Россумские универсальные роботы») механических рабочих, предназначенных для замены людей на тяжелых работах. Даже само название «робот» образовано от чешского слова robota, что означает тяжелый подневольный труд. В дальнейшем этот термин был использован производителями в рекламных целях для обозначения первых промышленных роботов. Такие роботы получили наибольшее распространение в промышленности и, прежде всего, в машиностроении и до сих пор составляют основу парка роботов в мире. Однако в настоящее время роботы нашли применение практически во всех сферах человеческой деятельности вплоть до обслуживания людей в быту, в военном деле, в освоении глубин океана и космоса, являясь при этом основой создания принципиально новых безлюдных технологий и технических систем. ГЛАВА 1 ИСТОРИЯ РАЗВИТИЯ РОБОТОТЕХНИКИ 1.1. Предыстория робототехники История робототехники уходит корнями в глубокую древность, когда впервые возникла идея и были предприняты первые попытки создания человекоподобных устройств в виде подвижных статуй, механических слуг и т. п. Статуи богов с подвижными частями тела (руками, головой) появились еще в Вавилоне, Древнем Египте, Китае. В «Илиаде» Гомера божественный кузнец Гефест выковывает механических служанок. Аристотель упоминает о приводимых в движение с помощью ниток куклах, из которых создавались целые механические театры. До нас дошли книги Герона Александрийского (I в. до н. э.), в которых описаны подобные и многие другие автоматы древности. В качестве источника энергии в них применялись вода, пар, гравитация (гири). В Средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов, и были созданы всевозможные часы с движущимися фигурами людей. К этому периоду относятся сведения о появлении первых подвижных человекоподобных механических фигур, получивших позднее название андроидов. Так, андроид алхимика Альберта Великого (1193– 1280) представлял собой фигуру ростом с человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему. Работы по созданию андроидов достигли наибольшего развития в XVIII в. с расцветом часового мастерства. Механиками-часовщиками были созданы андроидымузыканты, рисовальщики, писцы. К ним относится, например, «флейтист» французского механика Жака Вокансона (1709–1789) — фигура ростом с человека, которая подвижными пальцами исполняла 11 мелодий с помощью заложенной в нее программы (рис. 1.1). Целый ряд человекоподобных автоматов был создан швейцарскими часовщиками Пьером-Жаком Дро (1721–1790) и его сыном Анри Дро (1752–1791), от имени которого позднее и было образовано само название «андроид». Такие человекоподоб- 6 Глава 1 ные игрушки (рис. 1.2) представляли собой многопрограммные автоматы с оперативно сменяемыми программами. Программы задавались с помощью сменных штырьков, устанавливаемых на вращающемся барабане, и других подобных механических устройств. Источником движения служил пружинный привод часового механизма. Рис. 1.1. Механический флейтист (XIX в., Парижский национальный музей) Рис. 1.2. Механический писец Анри Дро Из отечественных устройств подобного типа можно вспомнить знаменитые часы «яичной» формы с театральным автоматом И. П. Кулибина (1735–1818). Интерес к созданию «механических» людей, начавший было затухать вместе с ослаблением роли часового дела, в дальнейшем вновь возродился в XX в. благодаря развитию электромеханики и электроники. Американский инженер Венсли построил управляемый на расстоянии с помощью свистка автомат «Телевокс», который мог не только выполнять ряд элементарных операций, но и произносить с помощью звуковоспроизводящей аппаратуры несколько фраз. Англичанин Гарри Мей в 1932 г. создал человекоподобный автомат «Альфа», который по командам, подаваемым голосом, садился и вставал, двигал руками, произносил несколько фраз. Несколько подобных автоматов под названием «Сабор» были созданы в Австрии Августом Губером. Они управлялись по радио, могли ходить, говорить, выполнять различные манипуляции. Такие устройства создавались в основном в рекламных целях, хотя делались попытки использовать их и для различных практических задач. К этому времени уже окончательно прижился термин «робот», а идеи робототехники все более энергично использовались в научно-фантастической литературе. История развития робототехники 7 1.2. Возникновение и развитие современной робототехники Современная робототехника, как уже было отмечено, сформировалась во второй половине XX столетия, когда в ходе развития производства возникла реальная потребность в манипуляционных машинах-автоматах, подобных «механическим людям», описанным К. Чапеком, и одновременно появились необходимые для их создания научно-технические предпосылки и, прежде всего, цифровая вычислительная техника. Современными предшественниками роботов были различного рода устройства для манипулирования объектами, непосредственный контакт человека с которыми опасен или невозможен, — копирующие манипуляторы с ручным или автоматизированным управлением. Первые такие устройства были пассивными (т. е. механизмами без приводов) и служили для повторения на расстоянии движений руки человека целиком за счет его мускульной силы. Позднее были созданы манипуляторы с приводами, управляемые человеком различными способами вплоть до биоэлектрического. Первые такие манипуляторы создавались в 1940–1950 гг. для атомных исследований, а затем и для атомной промышленности (рис. 1.3 и 1.4). Подобные устройства затем стали применяться в глубоководной технике, металлургии и ряде других отраслей промышленности. Полностью автоматически действующие манипуляторы с программным управлением впервые были созданы в США в 1960–1961 гг. В это же время стали разрабатываться экспериментальные образцы первых снабженных сенсорными системами роботов с адаптивным управлением. Рис. 1.3. Горячая камера с копирующим манипулятором 8 Глава 1 Рис. 1.4. Современный копирующий манипулятор Mascot (TELEROBOT, Италия) В 1962 г. в США появились автоматические машины марки Versatran, предназначенные для промышленных целей (рис. 1.5), и роботы Unimate-1900, которые получили первое применение в автомобильной промышленности на заводах «Дженерал моторс», «Форд» и «Дженерал электрик» (рис. 1.6). Тогда их впервые и назвали промышленными роботами (Indastrial Robot) — так возник этот термин. Рис. 1.5. Промышленный робот Versatran (AMF, США) История развития робототехники 9 Рис. 1.6. Промышленный робот Unimate-1900 (Unimation, США) Хронология дальнейшего развития производства роботов такова: в 1967 г. начат выпуск роботов в Англии, в Швеции и Японии (по лицензиям США), в 1971 г. — в ФРГ, в 1972 г. — во Франции, в 1973 г. — в Италии. Динамика последующего роста парка роботов в мире представлена в табл. 1.1. Таблица 1.1. Динамика роста парка роботов Год 1975 1080 1985 1990 1995 2000 2005 2010 Количество роботов (тыс. шт.) 8,5 30 90 400 800 1200 4000 7000 Парк роботов в мире возрастает в год в среднем на 20%. Основную часть этого парка до настоящего времени составляют промышленные роботы, но после 2000-х годов начала стремительно возрастать доля так называемых сервисных роботов — сравнительно дешевых устройств для чистки помещений, мойки окон и тому подобных домашних работ, а также роботов-игрушек. За последние 10 лет XX столетия стоимость промышленных роботов упала более чем в 5 раз при одновременном улучшении их технических характеристик. В результате возросла экономическая эффективность применения роботов. Первое место в мире по производству и применению роботов сейчас занимает Япония, далее следуют США, Германия, Италия, Франция, Швеция. Технический прогресс в развитии роботов направлен прежде всего на совершенствование управления. Первые промышленные роботы имели программное управление, в основном заимствованное у станков с числовым программным управлением (ЧПУ). Из станкостроения были взяты и приводы. Эти роботы получили название роботов первого поколения. Второе поколение роботов — это «очувствленные» роботы, снабженные сенсорными системами, главными из которых являются системы технического зрения (СТЗ), а также роботы с адаптивным управлением (адаптивные роботы). 10 Глава 1 Первые такие промышленные роботы с развитым очувствлением и микропроцессорным управлением появились и получили практическое применение в 1980– 1981 гг. на сборке, сварке, операциях, связанных с взятием неориентированных предметов, — например, с конвейера. Доля таких роботов в общем парке неуклонно растет и приближается к 50% — несмотря на то, что они в несколько раз дороже роботов с программным управлением и значительно сложнее в обслуживании. Однако это окупается неизмеримо большими функциональными возможностями, а следовательно, и более широкой областью применения. На рубеже XXI века робототехника подошла к следующему этапу своего развития — созданию роботов третьего поколения (интеллектуальных роботов). Это стало естественным этапом совершенствования адаптивных роботов. Интеллектуальный робот — это робот, в основных системах которого и, прежде всего, в управлении используются методы искусственного интеллекта. Это позволяет еще более расширить сферу применения робототехники практически на все области человеческой деятельности. В 1969 г. в США в рамках работ по искусственному интеллекту был создан экспериментальный образец подвижного робота Shakey с развитой системой сенсорного обеспечения, включая техническое зрение, и обладавшего элементами искусственного интеллекта, что позволило ему целенаправленно передвигаться в заранее неизвестной обстановке, самостоятельно принимая необходимые для этого решения (рис. 1.7). В 1971 г. в Японии также были разработаны экспериментальные образцы подобных роботов, способные самостоятельно осуществлять механическую сборку довольно простых изделий. В этот же период и в ряде других стран создаются подобные экспериментальные установки, получившие название интегральных роботов, снабженные манипуляторами, управляемыми от ЭВМ, а также различными средствами очувствления и общения с человеком-оператором, и предназначенные для проведения исследований в области искусственного интеллекта и создания интеллектуальных роботов. Методы искусственного интеллекта, как это следует из самого названия, — техническая реализация способов обработки информации, свойственных основанному на знаниях естественному интеллекту человека. Перспективой дальнейшего развития способов управления роботами, в направлении которых ведутся научные исследования, станет техническая реализация — наряду с интеллектом — также и творческих, креативных, способностей человека. Это будут роботы следующего, четвертого поколения — роботы с искусственным разумом (интеллект плюс креативность), т. е. разумные роботы. Наряду с совершенствованием способов управления роботами начались работы в новой, специфической области робототехники, занимающейся созданием шагающих машин как принципиально нового транспортного средства повышенной проходимости, образцом для которого являются ноги животных и человека. Были созданы первые экспериментальные образцы четырех- и шестиногих транспортных машин, протезы ног человека — так называемые экзоскелетоны — для парализо- История развития робототехники 11 Рис. 1.7. Интегральный мобильный робот Shakey (Stanford Research Institute, США): 1 — привод колес; 2 — ролик; 3 — датчики контакта; 4 — устройство управления телевизионной камерой; 5 — бортовое устройство управления роботом, связанное со стационарной ЭВМ; 6 — оптический дальномер; 7 — антенна системы радиосвязи; 8 — подвижная телевизионная камера; 9 — одно из двух мотор-колес ванных и тяжелобольных (рис. 1.8), а также для усиления физических возможностей людей (армия, космос и т. п.). В конце XX в. возродился интерес к двуногим роботам-андроидам. В отличие от их первых реализаций последние достижения робототехники сделали возможным создание подобных устройств для обеспечения вполне реальных потребностей. На рис. 1.9 показан образец подобного робота. Он способен двигаться по лестнице и преодолевать другие препятствия, выполнять весьма сложные манипуляции и вести диалог с человеком. Робот предназначен для домашних работ, может быть гидом, экскурсоводом и т. п. Такие роботы получили название гуманоидных. 12 Глава 1 Рис. 1.8. Экзоскелетон Рис. 1.9. Гуманоидный робот Asimo (Honda motors, Япония) Наряду с описанными направлениями развития роботов еще одной тенденцией развития робототехники стала миниатюризация, соответствующая общей тенденции развития техники в целом. В робототехнике процесс миниатюризации идет путем создания мобильных роботов все меньших размеров — сперва мини-, а затем микро- и нановеличины. На рис. 1.10 показан пример микроманипулятора для точного позиционирования образцов в электронном микроскопе. Рис. 1.10. Микроманипулятор для перемещения образцов в электронном микроскопе (проект Miniman, Европа) История развития робототехники 13 Возникнув в промышленности, в качестве промышленных роботов, робототехника быстро охватила сперва все основные отрасли хозяйства, включая горное дело, металлургию, строительство, транспорт, легкую и пищевую промышленность, сельское хозяйство, а затем и остальные сферы деятельности человека: освоение океана и космоса, военное дело, медицину, сферу обслуживания (сервисные роботы). 1.3. Развитие отечественной робототехники Первые результаты по созданию и практическому применению роботов в СССР относятся к 60-м годам прошлого века. В 1966 г. в институте ЭНИКмаш (г. Воронеж) был разработан автоматический манипулятор с простым цикловым управлением для перекладывания металлических листов. Первые образцы промышленных роботов с программным управлением были созданы в 1971 г. (УМ-1, «Универсал-50», УПК-1). В 1968 г. Институтом океанологии Академии наук СССР совместно с Ленинградским политехническим институтом и другими вузами был создан телеуправляемый от ЭВМ подводный робот «Манта» с техническим зрением и с очувствленным манипулятором, а в 1971 г. — следующий его вариант с системой целеуказания на телевизионном экране (рис. 1.11). Рис. 1.11. Один из первых отечественных подводных роботов «Манта» В 1971 г. в Ленинградском политехническом институте были созданы первые так называемые интегральные роботы с развитой системой очувствления, включая техническое зрение и речевое управление (рис. 1.12) [1]. В этом же году там же состоялся Первый Всесоюзный семинар, посвященный роботам, управляемым ЭВМ. 14 Глава 1 а) 3 1 2 7 4 5 6 б) Рис. 1.12. Экспериментальные интегральные роботы (ЦНИИРТК, Россия): а — ЛПИ-2: 1 и 2 — манипуляторы со съемными очувствленными схватами; 3 — передающая телевизионная камера; 4 — задающая рукоятка; 5 — система речевого управления; 6 — очувствленный двухкоординатный стол; 7 — ультразвуковой локатор; б — ЛПИ-3 (на переднем плане пульт управления с двумя задающими рукоятками) История развития робототехники 15 Начиная с 1972 г., работы в области робототехники приняли плановый характер в масштабе страны. Постановлением Госкомитета СССР по науке и технике на уровне государственной проблемы была сформулирована задача создания и применения роботов в машиностроении и определены основные направления ее решения. В следующем году была утверждена первая программа работ, которая охватила основные отрасли промышленности и ведомства, включая Академию наук и высшую школу. В соответствии с этой программой к 1975 г. были созданы и начали серийно выпускаться первые 30 промышленных роботов для обслуживания станков и прессов, для нанесения покрытий и точечной сварки. В последующие годы эта работа была продолжена на основе новой пятилетней программы — было создано более 100 марок промышленных роботов и организовано их серийное производство. Одновременно были начаты работы по стандартизации промышленных роботов по программе Госстандарта СССР. Фундаментальные и поисковые работы в области робототехники были развернуты на основе отдельных программ Академии наук и высшей школы, увязанных с комплексной программой Госкомитета СССР по науке и технике. К концу 1980 г. парк промышленных роботов в стране превысил 6 тыс. шт., что находилось, например, на уровне парка роботов США, и составлял более 20% парка роботов в мире, а к 1985 г. превысил 40 тыс. шт., в несколько раз превзойдя парк роботов США и достигнув 40% мирового парка. Первые промышленные роботы второго поколения со средствами очувствления появились в отечественной промышленности на сборочных операциях в приборостроении, начиная с 1980 г. В 1975 г. впервые был начат выпуск инженеров по робототехнике в Ленинградском политехническом институте, а в 1981 г. была введена новая специальность инженера-электромеханика «Робототехнические системы» и организована подготовка таких специалистов в ряде ведущих вузов страны. С распадом СССР вся эта работа по развитию отечественной робототехники на государственном уровне прекратилась. Парк роботов сократился более чем на порядок одновременно с сокращением производства в стране в целом. В результате к 1995 г. разработки и применение роботов в России сузились до задач обеспечения невыполнимых без роботов работ в экстремальных ситуациях (стихийные бедствия, аварии, борьба с террористами и т. п.). Правда, в этой сфере отечественная робототехника не потеряла ранее достигнутого научно-технического уровня и продолжала развиваться, в том числе путем участия в различных международных проектах и программах. На рубеже 2000-х годов начали возрождаться отраслевые и ведомственные научнотехнические программы по робототехнике и межотраслевые программы по отдельным особо государственно важным ее аспектам. Постепенно начал восстанавливаться парк роботов и в промышленности. Отечественная робототехника возрождается вместе со всей нашей промышленностью, экономикой и народным хозяйством в целом. Хорошим подспорьем ей в этом становятся создаваемые в стране центры иностранных фирм, поставляющие отечественным потребителям различные средства робототехники. 16 Глава 1 ГЛАВА 2 УПРАВЛЕНИЕ ДВИЖЕНИЯМИ ЧЕЛОВЕКА 2.1. Постановка задачи С момента зарождения робототехники и до настоящего времени образцами для нее служат живые организмы и, прежде всего, человек. Создаваемые сегодня роботы хотя по отдельным показателям и превосходят живую природу, но все еще уступают по ряду таких важнейших свойств, как обработка информации, управляемость и, конечно, по интеллектуальным возможностям человека. Поэтому живая природа для робототехники еще долго будет служить источником идей и образцом для заимствования. Кроме того, существует отдельная важная проблема создания технических средств, заменяющих отдельные части организма человека, — проблема протезирования. Наконец, средства робототехники в ряде применений должны действовать в органическом единстве с человеком. В связи с этим требуется знать, как организовано движение в живой природе и как оно управляется. Человек совершает во внешней среде два вида движений: манипуляции и локомоции. Манипуляция (от латинского слова manus, рука) — это движение рук. Локомоция (от латинских слов locо, место, и motus, движение) — движение всего тела для осуществления перемещения во внешней среде. Человек выполняет его с помощью ног, но иногда использует и руки (ползание, лазание, плавание). 2.2. Общая схема управления движением человека На рис. 2.1 показана обобщенная функциональная схема системы управления движениями тела человека. В нее входят пассивная часть — скелет, ее активная (движущая) часть — мышцы, чувствительные устройства — рецепторы и информационно-управляющая система — центральная нервная система (ЦНС). Скелет вместе с мышцами представляет собой объект управления, состоящий из подвижно соединенных звеньев, образующих многозвенные кинематические цепи. Управление 18 Глава 2 Рис. 2.1. Функциональная схема системы управления движениями человека этим объектом осуществляет ЦНС на основе информации, получаемой от рецепторов. Назначение такой системы управления — поддержание позы, ориентация во внешней среде, перемещение тела в пространстве — локомоции и, наконец, манипуляции. Рассмотрим ее составные части. Нейроны Нейроны — это нервные клетки, являющиеся «элементной базой» рассматриваемой системы. Существует много типов нейронов, специализирующихся на восприятии внешней информации, ее преобразовании, хранении, передаче и, наконец, воздействии на мышцы. В организме человека — десятки миллиардов нейронов, которые объединены в нейронную сеть, охватывающую все тело. На рис. 2.2 изображен нейрон. Он имеет несколько входов, на которые поступают сигналы от других нейронов через отростки — дендриты, и один разветвленный Рис. 2.2. Строение нейрона:1 — дендриты; 2 — аксон; 3 — синапсы; 4 — сома (тело клетки) Управление движениями человека 19 выход — аксон. Его соединения с дендритами других нейронов осуществляются через утолщения — синапсы. Сигналы на входе и выходе нейрона — электрические импульсы. Интенсивность сигналов определяется частотой следования и величиной этих импульсов. Сигналы могут быть возбуждающими или тормозящими. Выходной сигнал является нелинейной функцией суммы входных сигналов, которые алгебраически складываются с различными весовыми коэффициентами. Эти коэффициенты могут быть заданы генетически или настраиваться в процессе функционирования под воздействием других нейронов. При превышении суммарным входным сигналом определенного порога нейрон возбуждается и генерирует выходной импульс, который передается по аксону на другие нейроны. В местах соединения аксона с дендритами других нейронов — синапсах — происходит химический процесс преобразования выходного импульса во входные импульсы для этих нейронов. Кроме связей аксон-дендрит, в нейронной структуре существуют еще связи аксон-аксон и дендрит-дендрит. Это существенно увеличивает возможности обработки информации, т. к. количество синапсов на порядок больше числа нейронов. Длина аксонов отдельных нейронов соизмерима с размерами тела человека (например, некоторые аксоны идут от спинного мозга до пальцев ног). Один нейрон может иметь тысячи входов от других нейронов и сотни разветвлений выхода через синапсы. Возбуждение по аксону передается в виде числа импульсов величиной в сотые доли вольта и длительностью примерно 1 мс со скоростью 50–100 м/с. После каждого возбуждения нейрону требуется определенное время для возвращения в исходное состояние. Это так называемый рефракторный период. Аксоны нейронов объединяются в пучки, образуя стволы или нервы. На рис. 2.3 показана схема нейронной системы управления движением. Она обрабатывает информацию, получаемую от органов чувств, формирует модель внешней среды, соответствующую текущей ситуации, вырабатывает адекватные решения (реакции) в виде заданий на определенные действия и контролирует их выполнение. Рис. 2.3. Схема нейронной системы управления движениями 20 Глава 2 Нейронная нервная система состоит из десятков слоев нейронов, которые последовательно обрабатывают информацию от рецепторов путем ее последовательного обобщения, начиная с выделения элементов объектов, например, в зрении — линий, углов, однородных по цвету и освещению областей, затем более крупных частей объектов и так до нейронов-детекторов, выявляющих уже целые конкретные объекты внешней среды (детектор «бабушки» и т. п.) и события, а затем по их совокупности оценивают ситуацию в целом (так, при распознавании букв вначале распознаются их части, а затем — по их сочетанию — целые буквы). Особо распознаются движения. Топологически нейронные слои, начиная с нейронов-рецепторов и до детекторов, пронизаны колонками нейронов, обрабатывающих определенный рецепторный участок, и постепенно сужающимися к одному выходному детектору конкретного целого объекта. После слоев нейронов-детекторов следуют слои командных нейронов, которые через мотонейроны возбуждают конкретную двигательную реакцию на текущую ситуацию. Командные нейроны образуют моторную кору головного мозга, которая через мотонейроны управляет мышцами. Если в слоях нейронов-детекторов информация обрабатывается, обобщаясь снизу от рецепторов вверх к детекторам, то в слоях командных нейронов она передается в обратном направлении сверху вниз к мотонейронам мышц, детализируясь по пути. Оперативная память, показанная на рис. 2.3, реализована этими нейронными слоями. Наряду с ней существует постоянная память, в том числе и генетическая. Извлечение информации из памяти — ассоциативное, и вызывается внешними ситуациями как реакции на них. Вся эта нейронная структура обеспечивает память человека, его внутренний мир, поведение и копится всю жизнь. Мышцы Тело человека приводится в движение с помощью поперечно-полосатых мышц. Их основу составляют так называемые анизотропные элементы — диски размером с красное кровяное тельце. Под действием управляющего сигнала эти элементы сокращаются (в течение примерно 1 мс). Для возврата в исходное состояние элементу требуется вдвое-втрое большее время. Таким образом, он представляет собой импульсный двигательный элемент с существенным «мертвым» временем. Для создaния длительного непрерывного усилия соединенные в цепочку анизотропные элементы перемежаются изотропными элементами из упругой сухожильной ткани. Эти изотропные элементы играют роль амортизаторов, быстро растягиваясь при импульсном сжатии анизотропных элементов, а затем плавно возвращаясь в исходное состояние. Цепочки анизотропных и изотропных элементов образуют волокна. В зависимости от быстродействия и развиваемого усилия различают три типа волокон: быстро сокращающиеся и развивающие большое усилие, но быстро утомляющиеся волокна; Управление движениями человека 21 быстро сокращающиеся, но развивающие меньшее усилие, зато более выносли- вые волокна; медленно сокращающиеся и развивающие небольшое усилие, но наиболее вы- носливые волокна. Из волокон, объединенных в пучки по 10–15 в каждом, и состоит мышца. В одном пучке могут находиться волокна разных типов. Время сокращения волокон лежит в пределах 10–200 мс, а развиваемое ими усилие — от 1 до 1000 Н. Управление мышцей осуществляется двигательными нейронами — мотонейронами. Каждому мотонейрону подчинены волокна одного типа, которые распределены по разным пучкам мышцы. Для этого к каждому пучку подходит отдельный аксон этого мотонейрона, синапсы которого расположены на входящих в этот пучок волокнах данного типа. Объединенные таким образом по управлению однотипные волокна, принадлежащие одному пучку, образуют двигательную единицу. В каждую двигательную единицу входит до нескольких сотен и тысяч однотипных волокон. Управление мышцей осуществляется сериями импульсов, поступающих от мотонейронов и следующих с частотой 50–200 импульсов в секунду. В зависимости от количественного соотношения входящих в мышцу волокон разных типов образуются соответственно мышцы различного типа — от быстродействующих до медленнодействующих, но более выносливых. Таким образом, в целом, поперечно-полосатую мышцу можно представить как сложного состава двигатель, состоящий из большого числа (до нескольких тысяч) параллельно включенных элементарных импульсных двигателей — волокон, объединенных в пучки, a по управлению — в двигательные единицы разного типа. 1 2 Рис. 2.4. Крепление мышц-антагонистов: 1 — мышца-сгибатель; 2 — мышца-разгибатель 22 Глава 2 Требуемое изменение во времени мышечного усилия обеспечивается при этом путем последовательного включения в определенные моменты времени различного числа двигательных единиц разных типов. Мышца — это двигатель одностороннего (нереверсивного) действия, т. е. при поступлении сигнала она может только сокращаться, создавая усилие в одном направлении. Поэтому мышцы крепятся к костям по балансной схеме, образуя пары противоположно действующих мышц-антагонистов, как показано на рис. 2.4. Когда одна из этих мышц, сокращаясь, осуществляет относительное перемещение костей в одном направлении, другая мышца растягивается, подготавливаясь к выполнению движения в противоположном направлении. Рецепторы Рецепторы — это чувствительные устройства, подразделяемые на внешние и внутренние в зависимости от источников воспринимаемой ими информации. Основой их служат белковые молекулы. Под действием внешнего раздражителя они генерируют электрический потенциал, который преобразуется в электрические импульсы определенной частоты. Общее количество рецепторов у человека измеряется сотнями миллионов. Внешние рецепторы человека — это, прежде всего, пять основных органов чувств: зрение, слух, осязание, обоняние, вкус, затем вестибулярный аппарат (в височной кости), который определяет положение тела в пространстве и ускорение, а также множество рецепторов, расположенных в коже, — температурные, давления, болевые. У некоторых живых организмов имеются также рецепторы, чувствительные к магнитному и электрическому полям Земли. Внутренние рецепторы (интеррецепторы), которые связаны с управлением дви- жениями, выдают информацию о состоянии двигательного аппарата. Они делятся на мышечные рецепторы растяжения, сухожильные и механорецепторы суставов и кожи. Мышечные рецепторы размещены в мышце и дают информацию о длине мышцы и скорости ее изменения, сухожильные — об усилии и скорости его изменения, суставные — о величине суставного угла, скорости и ускорении его изменения. Центральная нервная система Устройство центральной нервной системы показано на рис. 2.5, а ее структура и состав — на рис. 2.6. Если некоторые части мозга имеют достаточно четкие границы — например, мозжечок, то другие постепенно переходят друг в друга. Передний мозг состоит из конечного мозга и промежуточного мозга. В конечный мозг входит кора в виде двух полушарий: левого и правого, включающих «новую кору», которая у человека превосходит всю остальную часть мозга и имеет толщину в 60–100 слоев нейронов. Для того чтобы по мере своего развития она поместилась в черепе, в ней образовались складки (борозды). Полушария соединены мозолистым телом и нервными путями. В каждом полушарии различают четыре доли: Управление движениями человека 23 Рис. 2.5. Устройство центральной нервной системы: 1 — «новая кора»; 2 — гипоталамус; 3 — мозолистое тело; 4 — таламус; 5 — мозжечок; 6 — вестибулярные ядра; 7 — спинной мозг; 8 — продолговатый мозг; 9 — ретикулярная формация; 10 — варолиев мост; 11 — затылочная доля; 12 — теменная доля; 13 — центральная борозда; 14 — лобная доля; 15 — двигательная кора; 16 — соматосенсорная кора; 17 — зрительная кора; 18 — слуховая кора; 19 — обонятельная кора; 20 — мозжечок; 21 — ствол мозга Рис. 2.6. Структурная схема центральной нервной системы лобную, височную, теменную и затылочную. В коре имеется сенсомоторная область, которая состоит из двух связанных областей: соматосенсорной области, получающей информацию от внутренних рецепторов (зрительных, слуховых и обонятельных), и моторной. Входящая в конечный мозг лимбическая система объединяет информацию от отдельных органов чувств и играет важную роль в поведении, направленном на 24 Глава 2 выживание (питание, чувство опасности, размножение). Находится лимбическая система под большими полушариями перед стволом мозга, как и промежуточный мозг, через который передаются ее сигналы. Промежуточный мозг включает таламус и гипоталамус. В таламусе осуществляется промежуточная обработка идущей к коре сенсорной информации (кроме обонятельной, которая обрабатывается в гипоталамусе) и части идущей «вниз» моторной информации. Гипоталамус вместе с лимбической системой определяет эмоциональное и мотивационное поведение. Кроме того, здесь контролируются биохимические процессы: солевой обмен, кровяное давление, дыхание, температура, водный баланс, чувства голода и насыщения, работа эндокринной системы. Ствол мозга управляет зрительными, слуховыми и двигательными рефлексами. Через него проходят вверх и вниз пути, связанные с рефлекторной и двигательной деятельностью. Ретикулярная формация ствола мозга, которая, вероятно, была когда-то высшим уровнем нервной регуляции, ответственна за выбор типа поведения (бежать от опасности или нападать и т. п.), она регулирует чередование сна и бодрствования, обеспечивает устойчивость позы в поле силы тяжести. Мозжечок вместе с варолиевым мостом образуют задний мозг. Через них проходят информационные пути вверх и вниз. Кроме того, мозжечок обеспечивает координацию движений, поддерживает тонус и регуляцию мышц. Продолговатый мозг является продолжением спинного мозга в черепе. Через него из спинного мозга вверх идет информация о положении частей тела и мышечном тонусе, а вниз — двигательные сигналы. Кроме того, продолговатый мозг участвует в регуляции сердечно-сосудистой системы, дыхания, пищеварения, равновесия. Спинной мозг расположен в позвоночнике и разделен на сегменты, которые управляют отдельными частями тела. Для этого в каждом сегменте имеются рецепторные нервные клетки и управляющие мышцами мотонейроны. Сегменты соединены нервными волокнами, которые идут вверх и вниз вдоль спинного мозга. Прежде чем перейти к рассмотрению взаимодействия частей мозга, рассмотрим, как осуществляется обработка информации от внешних рецепторов на примере зрительной и слуховой информации. В глазах человека находятся фоторецепторы, и в двух нейронных слоях выполняется предварительная обработка получаемой от них видеоинформации. В головном мозгу осуществляются три этапа последующей обработки зрительной информации, каждый из которых реализуется в среднем в шести нейронных слоях: в подкорковой структуре, в первичной зрительной коре и в так называемой широкой зрительной сфере. В сетчатке глаза содержатся два типа фоторецепторов: палочки и колбочки. Палочки в сотни раз чувствительнее к свету, чем колбочки, но зато последние чувствительны к цвету. Их три типа: чувствительные к синему, зеленому и красному участкам спектра электромагнитного излучения. Всего в сетчатке более 100 млн палочек и 6–7 млн колбочек. Распределены они по сетчатке неравномерно. В центре сетчатки расположены предельно плотно колбочки, а по мере удаления от Управление движениями человека 25 центра число колбочек уменьшается, и на периферии сетчатки остаются только палочки. Поэтому боковое зрение не различает цветов, но зато много чувствительнее центрального. В результате первоначальной обработки и обобщения информации, выдаваемой фоторецепторами, осуществляемой двумя слоями нейронов, расположенными в глазу, происходит сжатие первичной информации более чем на два порядка: приблизительно 125 млн сигналов от фоторецепторов преобразуются в примерно 1 млн сигналов, поступающих в такое же количество волокон выходящего из глаза зрительного нерва, идущего в головной мозг. Глаза человека находятся в постоянном движении, осуществляя обзорное сканирование поля зрения, что необходимо в связи с узкой зоной максимальной остроты зрения. Видеоинформация в виде пачек частотно-модулированных импульсов поступает с каждого глаза через свой зрительный нерв в многослойные подкорковые структуры зрительной системы. Эта часть зрительной системы — наиболее древняя в головном мозгу. У земноводных и рыб она является верхним уровнем, обеспечивая их рефлекторное поведение. У позвоночных и, особенно, у человека основные функции зрительной системы по мере их развития переместились в активно развившуюся корковую структуру с образованием зрительной коры полушарий головного мозга. При этом в зрительную кору правого полушария поступает информация от зрительного поля левого глаза за исключением части этого поля с края сетчатки со стороны виска. Вместо нее соответствующая информация поступает от своего глаза. В зрительную кору левого полушария, наоборот, поступает информация от правого глаза и частично от левого. Причина такой перекрестной передачи информации от глаз в мозг все еще остается загадкой. Разумеется, в конечном итоге вся видеоинформация попадает в оба полушария за счет их связи. (Заметим попутно, что такое же перекрестное соединение существует и у двигательных путей: левое полушарие управляет правой рукой, а правое — левой.) Несмотря на многократную обработку поступающей информации, она сохраняет топологическую привязку к первичному видеоизображению, фиксируемому фоторецепторами сетчатки, хотя и с существенными масштабными искажениями. Последнее прежде всего относится к информации от центральной области сетчатки. В зрительной коре мозга она за счет сужения периферийной части занимает больше места. Такая топологическая инвариантность сохраняется во всех нейронных слоях зрительной системы. В результате эта система представляет собой совокупность колонок, пронизывающих все эти слои вплоть до зрительной коры, в каждой из которых осуществляется обработка информации от определенного участка зрительного поля, все более обобщаясь от слоя к слою. (При этом осуществляется и вертикальный разворот на 180° видеокартины на сетчатке глаза для компенсации такого поворота, совершаемого хрусталиком.) Функции подкорковых структур зрительной системы человека, как они сформировались еще в ходе эволюционного развития животных, заключаются в опознании отдельных объектов внешней среды: их формы, цвета, взаимного расположения, 26 Глава 2 движения, т. е. всего того, что прежде всего было необходимо в ходе этого развития. Второй этап обработки зрительной информации в головном мозгу осуществляется в первичной зрительной коре. Она содержит тоже шесть нейронных слоев, через которые проходят упомянутые колонки сечением примерно 1–2 мм2, послойно обрабатывающие информацию с определенных участков зрительного поля, выявляя отдельные особенности объектов, выделенных ранее в подкорке: отрезки прямых линий с оценкой их длины и углового положения, дуги разной крутизны, крестообразные участки и т. п. Это выполняют нейроны-детекторы, которые возбуждаются, когда такие особенности появляются на участке зрительного поля, контролируемом колонкой с таким нейроном-детектором. Дальнейшая обработка этой информации, включая распознавание целых объектов внешней среды, осуществляется на последнем, третьем, этапе обработки и является функцией других структур головного мозга, которые получили название широкая зрительная сфера. В правом полушарии она использует образные представления, а в левом — вербальные. Общий принцип распознавания объектов для обоих полушарий один — это выделение отдельных фрагментов, определение их признаков, распознавание этих признаков и затем на третьем этапе по их совокупности распознавание уже объектов в целом. Однако этот процесс происходит по-разному в полушариях мозга в соответствии с разным видом информации, которым они оперируют. В правом полушарии, в отличие от левого, выявляемые фрагменты могут не иметь словесного эквивалента и вообще самостоятельного значения, как, например, черты лица человека. Поэтому правое полушарие, оперируя зрительными образами, обеспечивает наиболее быстрое узнавание объектов типа лиц людей, обобщение зрительных образов и их классификацию по форме и т. п. Левое полушарие, оперируя вербальными понятиями, являющимися обобщением образной информации, в отличие от правого полушария, тяготеет к фрагментарности в ущерб целостному рассмотрению и составляет базу абстрактного мышления человека понятиями. Как следует из изложенного, необходимым дополнением зрительной системы для обеспечения распознавания образов является память, хранящая прототипы и эталоны этих образов и их фрагментов. Это ассоциативная память — образная в правом полушарии и вербальная (на внутреннем языке) в левом. Распознаванию предшествует процесс обучения, который продолжается всю жизнь по мере ознакомления с новыми объектами и явлениями. В результате память заполняется все новыми сведениями о внешнем мире. Последняя функция зрительной системы человека — это определение дальности и связанное с этим трехмерное представление внешней среды. Основной способ определения дальности заключается в оценке видимых размеров объектов, известных по величине. Аналогично устроена слуховая система. Она включает два уха (с улиткой с чувствительными волосковыми клетками во внутреннем ухе, воспринимающими звуковые колебания воздуха, попадающие в уши), затем слуховой нерв, который идет Управление движениями человека 27 к слуховой области коры с промежуточным преобразованием информации. Одновременно на втором, более древнем, пути информация от обоих ушей объединяется для определения направления источника звука. Итак, обработка информации от всех органов чувств завершается в соответствующей области (центре) «новой коры» нейронами-детекторами, распознающими отдельные конкретные объекты («нейрон бабушки»). Затем осуществляется объединение информации от этих нейронов разных органов чувств в объединенные нейроны-детекторы разных объектов с учетом всей сенсорной информации о них. Помимо отдельных объектов, это выполняется и для распознавания различных значимых событий, ситуаций, процессов. Так формируется картина внешней среды для принятия адекватных решений по поведению. С учетом изложенного, на рис. 2.7 структура системы управления движениями человека, приведенная на рис. 2.1, представлена более подробно — с выделением отдельных частей центральной нервной системы. Здесь показаны три основных контура управления, которые будут рассмотрены далее: 1. Управление мышцами на основе внутренних обратных связей от внутренних рецепторов. 2. Экстрапирамидный путь управления, как совокупность рефлексов. 3. Пирамидный (новый) путь (тонкая линия). Рис. 2.7. Многоконтурная структура системы управления движениями человека 28 Глава 2 2.3. Динамические уровни управления движением На рис. 2.8 показана общая функциональная схема управления движениями человека. Система является иерархической, и в ней можно выделить следующие пять уровней управления: стратегический уровень принятия решений о выполнении определенных дейст- вий на основе мотиваций; тактический уровень планирования этих движений; три динамических уровня исполнения движений путем непосредственного управления мышцами в реальном времени. Начнем рассмотрение этих уровней снизу, с динамических уровней. Два нижних уровня — это управление по жестким программам, т. е. это уровни рефлекторного управления. Такое управление осуществляется через спинной мозг, но в нем участвует и головной мозг: нижние отделы мозжечка (обеспечение тонуса мышц и позы) и передний мозг (связанное программное управление). Рефлекторное управление отдельным суставом Этот нижний уровень динамического управления включает подуровни управления отдельными мышцами и с их помощью суставами. Контур управления отдельной мышцей замыкается на сегмент спинного мозга, которому подчинен участок тела, включающий эту мышцу, и состоит из трех частей: слоя мoтoнeйpoнoв, управляющих мышцей, слоя рецепторов мышц и сухожилий и расположенного между ними слоя, осуществляющего обработку информации и запоминание готовых программ реакций на определенные воздействия. В простейшем случае эти промежуточные слои могут отсутствовать, и тогда мотонейроны замыкаются прямо на рецепторы. Совокупность двух таких систем управления мышцами-антагонистами обеспечивает управление отдельным суставом. При этом контуры управления мышцами перекрестно связаны друг с другом сигналами позиционной обратной связи по длине мышцы — сигналы от рецепторов сокращаемой мышцы, помимо воздействия по цепи обратной связи на мотонейроны своей мышцы, одновременно воздействуют с обратным знаком на мотонейроны мышцы-антагониста, снижая ее возбуждение и тем самым уменьшая противодействие сокращающейся мышце. При подходе к заданному положению сустава, когда необходимо осуществить торможение, мышцы меняются ролями, и на мышцу-антагонист подается сигнал, вызывающий ее сокращение. На рис. 2.9 показана схема системы управления суставом. Управление движениями человека Рис. 2.8. Общая функциональная схема системы управления движениями человека 29 30 Глава 2 Рис. 2.9. Схема системы управления суставом: УС0, УС1, УС2 — устройства сравнения; ПД0, ПД1 — пропорционально-дифференцирующие звенья; Д — дифференцирующее звено Рефлекторное связанное управление несколькими звеньями конечностей тела Это второй динамический уровень управления, который обеспечивает совместное целенаправленное движение суставов одной или нескольких конечностей без использования сенсорной информации о внешней среде, т. е. тоже в виде рефлекторного управления, как и управление отдельным суставом. Связанное управление двумя конечностями осуществляется путем управления определенными суставами этих конечностей одним сегментом спинного мозга (внутрисегментарный рефлекс). Помимо сегментов спинного мозга, на этом уровне в управлении участвуют наиболее древние области переднего мозга, в которых на основании информации, получаемой от внутренних рецепторов, формируется общая картина положения всех частей тела и вырабатывается двигательная реакция, которая передается в спинной мозг. Управление движениями человека 31 Этот уровень управления, в основном исполнительный, отрабатывает команды вышестоящих уровней. Однако имеются определенные типы движений, для которых этот уровень является самым верхним. Это прежде всего различные ритмичные движения, не требующие оперативной информации о внешней среде, а также поддержание позы и обеспечение мышечного тонуса. В последних случаях в управлении участвуют еще и нижние отделы мозжечка. Управление с использованием внешней информации Если первые два уровня осуществляют программное управление, то этот, третий, уровень реализует адаптивное управление с использованием информации от внешних рецепторов. В этом уровне участвуют все отделы головного мозга. Реализуется он двумя параллельными путями: через второй уровень управления и непосредственным воздействием со стороны коры больших полушарий (ее двигательной зоны) на сегменты спинного мозга. Первый путь — это показанный на рис. 2.7 древний экстрапирамидный путь управления сложными движениями, которые постепенно осваивались живыми организмами в процессе эволюции и для реализации которых требовалось привлекать сенсорную информацию. На основе последней на этом уровне вырабатываются задания для второго уровня, после чего они оперативно корректируются в ходе реализации. Второй, пирамидный, путь, возникший несколько миллионов лет тому назад, реализует наиболее совершенные и сложные движения, которые не удается выполнить первым путем на базе ранее освоенных рефлекторных движений. В целом рассмотренный третий уровень управления ответствен за ориентацию во внешнем пространстве тела и органов чувств, локомоции и манипуляции, а также за выполнение таких сложных движений, как, например, упражнения на гимнастических снарядах, метание предметов, жонглирование ими, копирующие движения. Примером ориентационных движений являются также движения глаз при слежении за объектами внешней среды с учетом таких возмущений, как относительное перемещение этих объектов, изменение положения головы, изменение параметров объектов (яркости, контрастности и т. п.). Эти движения осуществляются глазодвигательной системой, которая содержит три пары мышц-антагонистов. Локомоции (ходьба, бег и т. п.), являясь периодическими движениями, реализуются на основе управления мышцами от своих «спинальных генераторов», которые синхронизированы друг с другом на том же сегментарном уровне. Необходимая адаптация к внешним условиям осуществляется, прежде всего, путем корректировки этих программных движений сигналами от внутренних рецепторов. Вышестоящие уровни управления корректируют локомоции уже с учетом тех внешних условий движения, которые определяются внешними рецепторами, включая изменение цели движения. 32 Глава 2 Манипуляционные движения больше всего зависят от внешних рецепторов и мотиваций. В коре больших полушарий головного мозга имеются области (сенсомоторная кора), за которыми закреплены определенные сегменты тела, и они осуществляют управление мышцами этих сегментов на основе получаемой внешней и внутренней информации. (Площадь этих областей тем больше, чем сложнее задача управления соответствующим сегментом тела.) В целом все рассмотренные динамические уровни управления движением, действуя совместно, реализуют требуемые движения в виде комбинации следующих трех составляющих: грубые и быстрые рефлекторные (программные) движения без обратной связи и без использования внешней информации (первый и второй уровни); такие же стереотипные движения, но корректируемые с помощью внешней ин- формации (экстрапирамидный путь третьего уровня); наиболее тонкие и точные движения, выполняемые с учетом текущей внешней информации (пирамидный путь третьего уровня). Последний вариант управления требует максимального участия головного мозга и задействуется только в тех случаях, когда требуемое движение не удается свести к рефлекторным. Кроме того, в случае необходимости он резервирует предыдущие варианты, а также участвует наряду с экстрапирамидным путем в отработке новых программ (формировании новых рефлекторных дуг). Такой процесс обучения можно представить следующим образом. Вначале требуемое новое движение многократно осуществляется путем управления мышцами непосредственно высшими двигательными центрами. Одновременно запоминаются и усредняются синтезированные при этом управляющие воздействия на отдельные мышцы. В результате формируется готовая двигательная реакция на задание сверху, а верхние уровни освобождаются от управления отдельными мышцами, передавая эту функцию нижним уровням. Эти вновь приобретенные в ходе обучения программы хранятся и реализуются третьим уровнем управления. Описанное трехуровневое управление движениями, наряду с такими очевидными достоинствами, как максимальная быстрота реакций (отдернуть руку и т. п.) и возможность обучения и разгрузка вышестоящих уровней для решения более сложных задач, имеет и определенные недостатки. При таком управлении движения зачастую получаются неоптимальными, не использующими всех возможностей двигательной системы организма. Управление мышцами непосредственно сверху позволяет не только получать лучшее качество движений, но и осуществлять принципиально новые типы сложных движений, не реализуемых с помощью экстрапирамидного пути, на котором этому препятствует набор врожденных и приобретенных стереотипных программных движений. Именно поэтому при освоении новых движений на производстве и в спорте часто главной проблемой становится преодоление ранее сложившихся рефлекторных движений [2]. Управление движениями человека 33 2.4. Тактический уровень управления движением Как следует из схемы на рис. 2.8, на этом уровне составляется план достижения той очередной цели, которая задается вышестоящим стратегическим уровнем управления. Отсюда этот план в виде конкретного алгоритма движений с выделением подцелей и последовательности их достижения спускается для реализации на динамические уровни. Со стороны тактического уровня осуществляются непрерывный контроль и в случае необходимости оперативная корректировка заданных алгоритмов при изменении реальной ситуации. Реализуется этот уровень корой больших полушарий головного мозга (ее ассоциативными областями), т. е. в полной мере он свойствен лишь человеку, а у высших животных существует в зачаточном состоянии. Тактические подцели, которые намечаются на этом уровне, требуют осмысленных движений, — например, при обращении с предметами. К таким действиям относятся производственные операции с применением орудий труда (сварка, сборка и т. п.), вязание спицами, работа хирурга, письмо. Такими же осмысленными действиями, но без предметов, является, например, речь. Тактический уровень — это высший уровень управления для подобных целенаправленных движений, реализующий их путем разбиения на более простые движения, которые затем уже «бездумно» исполняются нижними исполнительными уровнями. В зависимости от того, какая при этом необходима информация, управляющие воздействия с тактического уровня поступают на различные нижние уровни. Например, движения хирурга, для реализации которых требуется зрительная информация, осуществляются через третий уровень динамического управления, вязание спицами, где необходима только внутренняя информация, — через второй уровень, а письмо — в значительной степени прямо через первый уровень. Для выбора тактики достижения заданной сверху цели и составления соответствующего плана действий необходимо знать внешнюю обстановку и состояние организма. Этому служат модели внешней среды и тела, которые формируются и непрерывно корректируются на основе получаемой сенсорной информации. При этом для каждой конкретной цели такие модели преобразуются, ориентируясь на эту цель, путем выделения наиболее существенных для ее достижения особенностей и деталей. Используемая на этом уровне информация перерабатывается таким образом, что содержит уже не количественные, а обобщенные качественные характеристики объектов, т. е. здесь применяется не метрика предметов и действий с ними, а их топология и понятия (буква, стул и т. п.). Ранее было показано, как происходят отображение и последовательное преобразование зрительной и другой сенсорной информации слоями нейронов с целью выделения наиболее существенных для данной задачи объектов и их признаков. Эти запомненные многослойные отображения и являются моделями среды и тела. В слоях 34 Глава 2 ассоциативных областей коры производятся преобразования этих моделей с переходом от непосредственных чувственных образов к более абстрактным. В ходе составления тактического плана достижения поставленной конкретной цели его варианты сознательно «проигрываются» на моделях среды и тела, а после выбора окончательного плана составляется прогнозируемая модель будущего состояния среды и тела. Когда в процессе выполнения плана возникают расхождения с прогнозом, на тактическом уровне осуществляется оперативная корректировка плана. Как ранее было отмечено, уровень тактического управления ответствен за целенаправленные осмысленные движения. Однако это не означает, что все такие движения выполняются обязательно сознательно под непосредственным управлением головного мозга. Наоборот, для этого уровня характерно стремление к максимальной автоматизации движений на основе обучения, в том числе с помощью сознательно выполняемых упражнений и тренировок. При составлении планов выполнения очередной задачи прежде всего используется весь имеющийся в памяти врожденный и приобретенный опыт решения аналогичных задач в сходных ситуациях в виде готовых алгоритмов действий. 2.5. Стратегический уровень управления движением Это высший уровень всей иерархической системы управления движением. Здесь определяются цели и осуществляется контроль за их реализацией, включая оперативную корректировку этих действий и самих целей в зависимости от эффективности процесса их достижения. После завершения действий здесь же оцениваются достигнутые результаты. Этот уровень и сам непосредственно участвует в реализации наиболее сложных и новых движений. Выбор целей поведения определяется потребностями, их сравнительной важностью и возможностями их удовлетворения. Потребности проявляются в виде чувств (желаний): биологических и социальных, врожденных и приобретенных, инициированных извне или возникших в самом организме (голод, опасность, любопытство и т. д.). Предельно сильным проявлением чувства являются эмоции (гнев, восторг и т. п.). Существующие в данный момент потребности поступают в виде чувств в ассоциативные области коры больших полушарий головного мозга из лимбической системы в качестве мотиваций последующих действий. Там они сопоставляются и принимается решение о ближайшей цели поведения, которая затем реализуется подчиненными уровнями управления движением. Процедуру выбора доминирующей мотивации можно представить следующим образом. Сигналы об отдельных потребностях вызывают из памяти в ассоциативные области коры соответствующие алгоритмы действий, направленных на их удовлетворение. Последние представляют собой возбужденные зоны нейронных слоев, которые отображают управляющие воздействия на нижележащие уровни управления. Из всех этих порой противоречивых вариантов управления, возбужденные зо- Управление движениями человека 35 ны которых взаимно тормозят друг друга, пробивает дорогу вниз к реализации тот вариант, которому соответствует наиболее мощная, т. е. доминирующая над другими, возбужденная зона. Таким образом, выбор доминирующей мотивации осуществляется как бы голосованием нейронов ассоциативной области коры. Например, при внезапном обнаружении какой-либо серьезной опасности вызванное ею возбуждение, в том числе, возможно, сразу от нескольких органов чувств, подавит все другие потребности (чувства) и переключит действие организма на соответствующую этой новой эмоции реакцию (бежать, принять угрожающую позу и т. п.). Пока в ассоциативной области доминирует определенная возбужденная зона, она является временным центром управления поведением организма до удовлетворения соответствующей потребности или до подавления этого центра появившейся более обширной зоной возбуждения, требующей других действий. При оценке степени достижения поставленной цели критерием оптимальности является чувство удовлетворения соответствующей основной потребности. На стратегическом уровне выбранная основная цель обычно разбивается на отдельные подцели, которые последовательно выдаются на тактический уровень в виде очередной цели. Работа тактического уровня, как упоминалось ранее, начинается каждый раз с формирования моделей среды и организма, ориентированных на спущенную очередную цель, и с высвобождения из памяти отработанных ранее соответствующих планов действий, в которых эта цель в свою очередь может разбиваться на еще более мелкие тактические подцели. Эффективность работы стратегического уровня как наивысшего в иерархии управления действиями организма определяется степенью оптимальности принимаемых решений, учета при этом различных факторов, способных влиять на эти решения, длительностью охватываемого периода времени. Эти возможности организма обусловлены, прежде всего, объемом памяти и эффективностью ее использования. На общей функциональной схеме системы управления движениями человека (см. рис. 2.8) показаны, в частности, прямые управляющие воздействия сверху вниз, минующие отдельные промежуточные уровни (пирамидный путь), идущие вверх каналы обратной связи и воздействия на модели среды и тела со стороны стратегического и тактического уровней, осуществляющие подстройку этих моделей под очередную конкретную задачу и используемые для прогнозирования результатов планируемых действий. Завершая рассмотрение этой системы управления, еще раз подчеркнем, что каждый ее уровень реализует порученную ему операцию путем разбиения на более мелкие типовые операции, находящиеся в арсенале нижеследующего уровня, и последовательной выдачи этому уровню соответствующих команд. Наряду с таким последовательным иерархическим процессом управления здесь, во-первых, осуществляются, как уже упоминалось, прямые воздействия сверху с пропуском отдельных промежуточных уровней, а, во-вторых, отдельные реакции организма на внешние и внутренние возмущения реализуются без участия верхнего уровня определенным промежуточным уровнем в соответствии с его специализацией. Таким образом, все уровни управления в действительности работают как последовательно, так и параллельно, дополняя и резервируя друг друга. 36 Глава 2 Важными особенностями материальной реализации рассмотренной системы являются ее многоканальность и избыточность. Получение информации, ее обработка, запоминание и преобразование в мышечные усилия осуществляются по тысячам и миллионам параллельно действующих каналов из послойно построенных ансамблей нейронов. Эта информация носит вероятностный характер, как и состав обрабатывающих ее ансамблей нейронов, который сам определяется этой информацией. (При этом от слоя к слою каждый вид информации: зрительная, акустическая, температурная и т. п. — передается тактированно с распределением ее по слою в соответствии с пространственным размещением отображаемых ею объектов в реальной среде.) Такой принцип параллельной обработки сигналов обеспечивает системе в целом необходимые быстродействие и надежность, недостижимые пока в технических системах. 2.6. Интеллект и творчество Рассмотренные ранее функции головного мозга по оценке ситуаций и принятию решений, как уже отмечалось, относятся к разумной мыслительной деятельности человека. В общем виде она определяется двумя способностями человека: интеллектом, т. е. способностью приобретать и целенаправленно использовать знания, и креативностью, т. е. творческими способностями. Мышление — это пространственно-временной процесс, который совершается в коре и подкорке головного мозга в форме генерации волн активации и их торможения. В мозгу есть зоны с фиксированными функциями (обработка сенсорной информации, речь и др.), однако процесс мышления, как и память, охватывает весь мозг. При этом память включает как врожденную (генетическую) информацию, так и приобретаемую, благодаря собственному опыту в процессе жизни и обучения в целом. Стимулы, мотивация или, наоборот, торможение мышления определяются эмоциями. Основа мышления — это стереотипы (безусловные и условные рефлексы) и ассоциации. Отклонение внешней ситуации от комбинаций стереотипов является мотивом для того, чтобы «задуматься» и осуществить корректировку стереотипных реакций. Это процесс обучения. Параллельно идет процесс «борьбы» врожденного творческого начала со стереотипным (догматическим) мышлением и различными запретами (психологическими, социальными, профессиональными и т. п.). Как было отмечено ранее, головной мозг, включая все рассмотренные его отделы, разбит на два полушария. Правое полушарие оперирует образной информацией, а левое — символьной. В ходе эволюции вначале возникло образное представление о мире на основе сенсорной информации. То же происходит и в ходе развития ребенка. Затем в процессе обобщения сенсорной информации (классификация объектов, абстрагирование) возникает более обобщенное символьное (знаковое) представление о мире с переводом его в слова сначала внутреннего языка, а затем и языков общения во внешнем мире. Мышление у человека возникло из видения внешнего мира, письменность — из изображения его объектов. У первобытных людей процесс развития мышления на- Управление движениями человека 37 чался с наскальных рисунков отдельных объектов (зверей, людей), затем сцен (охоты, ритуалов и т. п.) и целых рассказов в виде последовательности таких рисунков. Примерно с четвертого тысячелетия до н. э. интенсифицировался процесс упрощения и стилизации изображений предметов. Появилось рисуночное письмо — пиктограммы (клинопись на глиняных пластинах у шумеров, иероглифы в Египте и Китае), затем буквенное письмо и, наконец, фонетическое буквенное, позволяющее произносить написанное (появились буквы и их комбинации, выражающие определенные звуки речи). У новорожденного оба полушария функционируют одинаково, и только постепенно левое полушарие берет на себя функцию логического анализа объектов и ситуаций внешней среды, специализируясь на обобщенном символьном представлении информации. После этого оба полушария начинают работать поочередно: когда одно активизируется, другое притормаживается. В правом полушарии осуществляется обработка сенсорной информации, включая распознавание образов внешнего мира и построение соответствующей его модели. Левое полушарие отвечает за логическое мышление, языковую и другую знаковую информацию и речь. В нем формируется языковая модель мира. Память правого полушария хранит представления о предметах и явлениях внешнего мира, а левого — понятия, знания, семантику языка. Все это объединено ассоциативными связями. Справа делается оценка по близости, по месту, по времени; слева — по сходству абстрактных признаков. Правая память позволяет быстро узнавать объекты, а левая — оценивать их свойства и экстраполировать ситуации. Запоминание в правом полушарии чаще непроизвольное, а в левом — осознанное. В правом полушарии содержится эмоциональная память, которая определяет личное отношение к ситуациям. Прежде всего это эмоции, ориентированные на самосохранение и обеспечивающие предельно быструю реакцию на опасности. Обе модели мира взаимосвязаны. Точки одного полушария соединены с соответствующими точками другого, что обеспечивает связь образной и словесной информации об одних и тех же объектах и явлениях. Таким образом, процесс мышления включает две фазы: образную («правую») и логическую («левую»). В «правой» фазе мышление осуществляется в виде поиска решений в памяти на основе ассоциаций и аналогий конкретных образов или их более абстрактных изображений, а в «левой» — путем вскрытия логических отношений вне времени и пространства. При этом в процессе мышления происходит циклическая передача решаемой задачи от одного полушария к другому с соответствующим торможением первого и активацией второго. Каждое полушарие, принимая задачу, продолжает ее решение в соответствии со своей моделью мира до исчерпания своих возможностей, после чего передает ее другому полушарию. Наиболее обобщенный оператор «правого» мышления — это образная и чувственная идея. Для ее передачи в левое полушарие необходимо ее символьное (языковое) описание. «Левое» мышление включает такие логические операции, как анализ и синтез. Инициатором очередного мыслительного процесса может быть любое из полушарий: правое — в виде эмоциональной выдачи какой-то задачи (цели) левому полу- 38 Глава 2 шарию или начала по той же причине собственного подсознательного интуитивного процесса, левое — как результат сознательно сформулированной задачи. Например, это может быть задача обучения какому-либо техническому приему. Сначала в этом процессе будет доминировать левое полушарие, сознательно управляя движением тела, а затем эти движения перейдут в стереотип правого полушария. Как отмечено ранее, особым видом мыслительной деятельности является творчество. В его основе лежит интуиция — бессознательное решение задач. Поэтому творческие возможности связаны прежде всего не с эрудицией, т. е. не с левым полушарием мозга, являющимся основой интеллекта, знаний, а с воображением, т. е. с правым полушарием, со способностью преодолевать стереотипы и оригинально, нестандартно мыслить. Хотя творческие способности можно развить и научиться эффективному их использованию, в их основе лежат, прежде всего, врожденные качества личности. Поэтому психологи и отделяют творческие способности — креативность — от интеллекта. Их связь сводится к одному: для творчества необходим определенный уровень интеллекта, однако последний не предопределяет творческие возможности. Творческое начало лежит в основе всех видов человеческой деятельности, включая, прежде всего, искусство, науку и технику. И везде оно является самым загадочным, неконтролируемым и тем более не поддающимся планированию интуитивным процессом. При этом в каждой сфере человеческой деятельности творческий процесс имеет свою существенную специфику. Так, если в искусстве результат творчества всегда субъективен и неотделим от личности автора, то в науке он объективен и не зависит от личности, т. к. отражает закономерности природы. (В отличие от произведений Шекспира законы, получившие имя Ньютона, неизбежно были бы открыты и помимо Ньютона.) И если ученый должен во всем сомневаться, но зато быть совершенно и доказательно уверен в результатах своей деятельности, то, например, инженер-творец техники, наоборот, может быть уверен в положительном результате очередной разработки, но будет полон сомнений и даже желания все сделать поновому по ее завершении. Если специалистов с такими подходами к делу и настроем поменять местами, то бывший инженер ничего не откроет в науке, а ученый не создаст в технике. Исключением, которое только подтверждает это правило, являются очень близкие друг другу ученые-организаторы и инженеры-создатели принципиально новой техники. Такие уникальные личности неизбежно носят в себе противоречие, конфликт между этими двумя началами, который все время требует мучительного компромисса. Всякий творческий процесс многоэтапен. Подсознательная составляющая творчества является только одним из этапов этого процесса, который включает в целом и этапы сознательной деятельности, охватывая таким образом оба полушария головного мозга и представляя собой как бы диалог сознания с подсознанием. Процесс творчества начинается с сознательного этапа, на котором формулируется задача и делаются попытки ее решения формальными методами. Этот этап запускает следующий уже подсознательный процесс интуитивного поиска решения в виде перебора различных комбинаций и сочетаний в случайном беспорядке образов подсознания, в котором основное значение имеют аналогии и ассоциации. Управление движениями человека 39 Что касается критериев отбора решений, то основанием для их извлечения из подсознания является, по-видимому, эстетическое чувство гармонии, красоты решения. Так, по крайней мере, объясняли этот процесс многие великие творческие личности: Гаусс, Гельмгольц, Ламартин, Пуанкаре и др. (Стоит вспомнить критерий А. Н. Туполева при оценке им новых самолетов: «самолет должен быть красивым».) После подсознательного творческого этапа должен следовать завершающий этап сознательной формулировки найденного решения и обязательной проверки, т. е. доказательства его правильности. Основные средства здесь — эксперимент и математика. (В последнем случае математика выступает только как язык науки, а для понимания реальных процессов нужны понятия самой науки: сила, энергия, информация и т. д.). В этом процессе мышления определяющую, доминирующую роль при принятии решений играет правое полушарие, т. е. подсознательное образное мышление. Оно определяет и все поведение человека, его личность. 40 Глава 2 ГЛАВА 3 УСТРОЙСТВО РОБОТОВ 3.1. Состав, параметры и классификация роботов 3.1.1. Состав роботов Как было показано во введении (см. рис. B.1), робот состоит из двух исполнительных и трех информационных систем. Исполнительные системы — это манипуляционная система (обычно в виде механических манипуляторов) и системы передвижения, имеющиеся только у мобильных (подвижных) роботов. Информационные системы — это информационно-измерительная и управляющая системы и система связи. Первая осуществляет информационное обеспечение робота, а вторая на этой основе — управление его исполнительными системами. Система связи обеспечивает связь с человеком-оператором и различными техническими системами, в том числе другими роботами. Для того чтобы ознакомиться с характеристиками роботов, рассмотрим их классификацию по основным показателям, которые определяют типы роботов: по назначению, по техническим показателям, в соответствии с которыми роботы выбирают, по управлению и по техническому уровню для их сравнительной оценки. 3.1.2. Классификация роботов По назначению Первым показателем, в соответствии с которым все роботы делятся на группы, является их назначение, т. е. области применения. Эти области были названы в разд. 1.2. Сегодня основным типом роботов по-прежнему являются промышленные роботы (ПР), которые предназначены для применения в отраслях промышленности и, прежде всего, в машиностроении и составляют большую часть всего парка роботов в мире. Промышленные роботы по типу выполняемых операций делятся на роботы технологические, которые выполняют основные технологические операции, и роботы 42 Глава 3 вспомогательные, предназначенные для выполнения вспомогательных технологических операций по обслуживанию основного технологического оборудования. Технологические роботы относятся к основному технологическому оборудованию, а вспомогательные можно отнести к средствам автоматизации и механизации. По широте перечня операций, для выполнения которых предназначен робот, различаются роботы специальные, специализированные и универсальные: специальные роботы предназначены для выполнения одной конкретной техно- логической операции (например, сварки, нанесения покрытий, определенной сборочной операции) или обслуживания конкретного технологического оборудования; специализированные роботы могут выполнять несколько однотипных операций (сборочный робот со сменными рабочими инструментами, робот для обслуживания определенного типа технологического оборудования и т. п.); универсальные роботы могут выполнять различные основные и вспомогатель- ные операции в пределах их технических возможностей. Увеличение степени универсальности робота расширяет область его возможных применений, но одновременно неизбежно сопровождается недоиспользованием этих возможностей на каждой конкретной операции, а также удорожанием робота. Оптимальными в этом отношении являются специальные роботы, но, с другой стороны, это предельно сужает их область применения, а следовательно, и объем их производства. По техническим показателям К техническим показателям роботов относятся: тип приводов — приводы, которые используются в манипуляторах и системах передвижения роботов, могут быть электрическими, гидравлическими и пневматическими. Часто их применяют в комбинации. Например, в звеньях манипулятора большой грузоподъемности уместен гидравлический привод, а в его захватном устройстве — более простой и маломощный пневматический привод. Приводы роботов будут рассмотрены в главе 4; грузоподъемность — это грузоподъемность манипуляторов робота, определяе- мая массой перемещаемых им полезных грузов, а для мобильного робота еще и грузоподъемность его шасси. По грузоподъемности различают тяжелые роботы (до тысяч кг), средние (десятки кг), легкие (единицы кг) и сверхлегкие. Большинство роботов имеют среднюю грузоподъемность от 5 до 50 кг; количество манипуляторов у роботов в большинстве случаев ограничено одним. Однако для конкретных назначений существуют конструкции роботов с двумя, тремя и, совсем редко, четырьмя манипуляторами. Обычно манипуляторы робота выполняют одинаковыми, но имеются роботы и с манипуляторами разной конструкции; тип и параметры рабочей зоны их манипуляторов. Рабочая зона манипулято- ра — это пространство, в котором может находиться его рабочий орган при всех Устройство роботов 43 возможных положениях звеньев манипулятора. Форма рабочей зоны определяется числом и типом степеней подвижности манипулятора; подвижность робота определяется наличием или отсутствием у него системы передвижения. В первом случае роботы называют мобильными, а во втором — стационарными. В соответствии с назначением роботов в них нашли применение практически все известные способы передвижения: наземные (колесные, гусеничные и др.), предназначенные для передвижения в воде, воздухе и в космосе. Специфическим для робототехники способом передвижения является шагание; исполнение робота по назначению определяется внешними условиями, в кото- рых он должен функционировать. Различают исполнение нормальное, пылезащитное, теплозащитное, влагозащитное, взрывобезопасное и т. д. По управлению Классификация роботов осуществляется по способу управления, быстродействию и точности управления. По способу управления различают роботы с программным, адаптивным и интел- лектуальным управлением. Роботы с программным управлением исторически первые — это роботы первого поколения, роботы с адаптивным и интеллектуальным управлением относятся соответственно ко второму и третьему поколениям. Быстродействие для манипулятора робота определяется линейной скоростью перемещения его рабочего органа и может быть разбито на три диапазона: • малое — до 0,5 м/с; • среднее — от 0,5 до 1–2 м/с; • высокое — при бо́льших скоростях. Наибольшая скорость манипуляторов современных роботов превышает 10 м/с. Для значительной части областей применения роботов этот показатель очень важен, т. к. определяет их производительность. Основная трудность при повышении быстродействия связана с известным противоречием между быстродействием и точностью. Точность манипуляторов и систем передвижения роботов характеризуется величиной погрешности позиционирования. Чаще всего она определяется абсолютной погрешностью. Точность роботов общего применения можно разбить на три диапазона в зависимости от линейной погрешности: • малая — погрешность от 1 мм и более; • средняя — от 1 до 0,1 мм; • высокая — при меньшей погрешности. Большинство современных роботов имеют среднюю точность позиционирования. Наименьшая точность характерна для роботов, предназначенных для вы- 44 Глава 3 полнения наиболее грубых, например, транспортных движений, а наибольшая — сотые миллиметра, микроны — для роботов, используемых в электронной промышленности и медицине. По сравнению с человеческой рукой существенным недостатком современных роботов является снижение точности с увеличением хода манипулятора, в то время как у человека эти параметры в значительной степени развязаны благодаря разделению движений на грубые (быстрые) и точные, как показано в главе 2. * * * Рассмотренные в этом разделе параметры роботов используются при формировании типажа роботов и, соответственно, их наименования. Примерами названий роботов могут служить: легкий пневматический промышленный робот для обслуживания прессов холодной штамповки, окрасочный гидравлический промышленный робот и т. д. Классификация роботов по управлению определяет их технический уровень. При его определении используются также и некоторые из ранее рассмотренных параметров, которые могут иметь количественное выражение, — такие как быстродействие и точность. Однако если при использовании этих параметров для классификации роботов их разбивают, как было показано, на диапазоны, и тип робота определяют по принадлежности значения данного параметра к одному из них, то сравнительную оценку технического уровня роботов производят исходя из конкретных численных значений параметров. При этом широко применяются различные, основанные на указанных ранее параметрах, комбинированные и относительные показатели. К ним относятся, в частности, относительная грузоподъемность, отнесенная к массе робота, выходная мощность манипулятора, отнесенная к мощности его приводов, размер рабочей зоны, отнесенный к габаритам робота. Другими, ранее не упоминавшимися параметрами, характеризующими технический уровень роботов, являются число одновременно работающих степеней подвижности, надежность и способы программирования. 3.2. Манипуляционные системы Сегодня основным типом манипуляционных систем роботов являются механические манипуляторы. Они представляют собой пространственные механизмы в виде кинематических цепей из звеньев, образующих кинематические пары с угловым или поступательным движением и системой приводов, обычно раздельных для каждой степени подвижности. Манипуляторы заканчиваются рабочим органом. Степени подвижности манипулятора делятся на переносные и ориентирующие1. Переносные степени подвижности служат для перемещения рабочего органа в рабочей зоне манипулятора, а ориентирующие — для его угловой ориентации. 1 Следует различать понятия степень подвижности, которое относится к конструкции, и степень свободы в теоретической механике. Устройство роботов 45 Минимально необходимое число переносных степеней подвижности для перемещения рабочего органа в пространстве рабочей зоны равно трем. Однако для расширения манипуляционных возможностей и реализации более сложных траекторий движения, например, с обходом препятствий, а также для повышения быстродействия, манипуляторы обычно снабжают несколькими избыточными переносными степенями подвижности, хотя это усложняет и удорожает робот. Современные манипуляторы в среднем имеют 4–6 степеней подвижности, но существуют манипуляторы и с 8–9 степенями. Максимально необходимое число ориентирующих степеней подвижности равно трем. Они реализуются кинематическими парами с угловым перемещением, обеспечивающим поворот рабочего органа манипулятора относительно его продольной и двух других взаимно перпендикулярных осей. 3.2.1. Разомкнутые кинематические цепи из жестких звеньев На рис. 3.1–3.4 показаны конструкции манипуляторов с различными переносными степенями подвижности и различной формой рабочей зоны. Манипуляторы, имеющие все поступательные степени подвижности, работают в прямоугольной системе координат (рис. 3.1) и имеют прямоугольную рабочую зону в форме параллелепипеда. На рис. 3.5 показан пример промышленного робота, два вертикально расположенных манипулятора которого работают в прямоугольной системе координат. Манипуляторы, у которых наряду с поступательными перемещениями осуществляется одно угловое перемещение, работают в цилиндрической системе координат а) б) Рис. 3.1. Манипулятор с прямоугольной системой координат (а) и его рабочая зона (б) 46 Глава 3 (рис. 3.2). Соответственно, их рабочая зона ограничена цилиндрическими поверхностями. В цилиндрической системе координат работает робот, показанный на рис. 1.5. На рис. 3.3 показан манипулятор, работающий в сферической системе координат. Здесь имеются два угловых перемещения, и рабочая зона ограничена сферическими поверхностями. Такую систему координат имеет, например, манипулятор промышленного робота, показанного на рис. 1.6. а) б) Рис. 3.2. Манипулятор с цилиндрической системой координат (а) и его рабочая зона (б) а) б) Рис. 3.3. Манипулятор со сферической системой координат (а) и его рабочая зона (б) Показанный на рис. 3.4 манипулятор с угловой системой координат имеет только угловые перемещения, т. е. все его звенья соединены шарнирами. Поэтому часто такие манипуляторы называют шарнирными или антропоморфными. Роботы с та- Устройство роботов 47 кого типа манипуляторами благодаря возможности последних складываться, не выступая практически за габариты основания робота, обладают наибольшей компактностью, хотя и наиболее сложны в управлении. Такую кинематику имеют манипуляторы роботов, показанных на рис. 3.5, 3.6 и 3.8. а) б) Рис. 3.4. Манипулятор с угловой системой координат (а) и его рабочая зона (б) Рис. 3.5. Шарнирный сборочный промышленный робот SIGMA, справа — шкаф управления (Olivetti, Италия) Манипуляторы реальных роботов содержат, как отмечалось ранее, бо́льшее число степеней подвижности, чем у показанных на рис. 3.1–3.4, поэтому в них используются более сложные комбинации угловых и поступательных степеней подвижности. 48 Глава 3 3.2.2. Кинематические цепи, включающие параллельно соединенные звенья Механические системы современных манипуляторов представляют собой, как было только что показано, разомкнутые кинематические цепи из подвижно соединенных звеньев, образующих вращательные и поступательные кинематические пары, обычно 5-го класса, т. е. с одной степенью подвижности. Однако применяются и более сложные кинематические схемы манипуляторов — с параллельно соединенными звеньями. Пример такой схемы приведен на рис. 3.6. Здесь параллельно основному звену введена тяга, образующая с ним параллелограммный механизм. Он обеспечивает поступательное линейное вертикальное движение рабочего органа при повороте шарнира 3 (при его повороте по часовой стрелке левая тяга поворачиа) б) Рис. 3.6. Манипулятор робота IRB 1400 (а) и его конструкция с рабочей зоной (б) (ABB, Швейцария) Устройство роботов 49 вает в том же направлении шарнир 2, сдвигая рабочий орган вправо с окружности относительно точки 3). Такая конструкция упрощает управление движением рабочего органа. На рис. 3.7 показаны другие варианты кинематических схем с параллельным соединением звеньев, нашедшие применение в манипуляторах для повышения их жесткости и маневренности. Так схема на рис. 3.7, б называется платформой Стюарта и состоит из двух пластин, шарнирно соединенных несколькими (минимально тремя) поступательными парами. При изменении длины этих пар происходит пространственное поступательное и угловое перемещение верхней пластины относительно нижней. На рис. 3.7, в показана реализующая такую кинематику конструкция — гексапод, получившая применение, в частности, в станкостроении. Применяется и последовательное соединение нескольких таких конструкций. а) б) в) Рис. 3.7. Варианты параллельных кинематических схем Помимо рассмотренных кинематических схем конструкция манипуляторов определяется также типом и размещением приводов. Наконец, к манипуляторам часто добавляются устройства уравновешивания, применение которых также сказывается на их конструкции. Рассмотрим особенности размещения и компоновки приводов и устройства уравновешивания манипуляторов. С точки зрения простоты передачи движения от двигателя к звену манипулятора лучше всего, конечно, размещать двигатели непосредственно у перемещаемых ими звеньев. Однако такая компоновка приводит к существенному увеличению габаритов манипулятора и движущихся масс. Этот недостаток тем существеннее, чем дальше рассматриваемое звено манипулятора находится от его основания и ближе к рабочему органу, т. к. тем большее число предыдущих звеньев и их приводов на- 50 Глава 3 гружается этим звеном. Поэтому, чем дальше звено от основания манипулятора, тем больший эффект дает перенос его двигателя на одно из предыдущих звеньев, поближе к основанию манипулятора. Конечно, это требует введения соответствующих механизмов передачи движения от двигателя к звену, что усложняет конструкцию манипулятора. В манипуляторе, показанном на рис. 3.8, двигатель привода 1-й степени подвижности вокруг вертикальной оси размещен на основании манипулятора, а двигатели а) б) в) Рис. 3.8. Манипулятор промышленного робота Puma (а), его конструкция (б) и его кинематическая схема (в) Устройство роботов 51 степеней подвижности 2 и 3 размещены рядом на 2-м звене. С приводимыми ими осями они связаны через редукторы, а двигатель 3 еще и валом с шарнирами Гука. Двигатели степеней подвижности 4, 5 и 6 размещены на 3-м звене манипулятора. Передача движения от них осуществляется через валы с шарнирами Гука и зубчатые передачи. Размещение этих двигателей с другой стороны оси вращения звена относительно основной его части обеспечивает статическое уравновешивание веса этих звеньев манипулятора относительно осей их вращения и, соответственно, разгружает двигатели 2 и 3. На рис. 3.9 приведен пример предельного варианта компоновки манипулятора с семью степенями подвижности, у которого все двигатели размещены на его основании, а передача движения от них к звеньям манипулятора осуществляется через вставленные друг в друга трубчатые валы и конические зубчатые передачи в шарнирах манипулятора. Соответственно, в первое от основания манипулятора звено входит 7 валов, во второе — 6, а в последнее, на котором размещен рабочий орган в виде схвата, — 2 вала для его вращения относительно продольной оси и для привода схвата. При этим изменяется и число зубчатых передач в шарнирах манипулятора от первого до последнего. Такая компоновка применяется в манипуляторах, предназначенных для работы с опасными объектами, — например, радиоактивными, чтобы вынести приводы из рабочей зоны. Другой предельный случай размещения двигателей — непосредственно на приводимых ими звеньях — нашел применение в манипуляторах с безредукторными (прямыми) электрическими приводами и линейными электрическими приводами. Отсутствие в этом случае редукторов и механических передач позволяет обеспечить наиболее высокую точность позиционирования благодаря повышенной жесткости и отсутствию зазоров. Оригинальным решением, улучшающим динамические возможности шарнирных манипуляторов, является их размещение в горизонтальной плоскости. При этом разгрузка двигателей от веса звеньев манипулятора и полезного груза позволила существенно повысить быстродействие устройства, доведя скорость его рабочего органа до 10 м/с и выше. Манипуляторы с такой компоновкой нашли широкое применение на сборочных операциях. На рис. 3.10 показан пример такого манипулятора. Как было отмечено, важным компонентом манипуляторов являются системы уравновешивания. Эти системы осуществляют статическую разгрузку приводов от веса элементов конструкции манипулятора и полезного груза, что позволяет существенно снизить усилие и мощность, требуемые от приводов. Существуют два способа такого уравновешивания: пассивное и активное. Первый способ (пассивное уравновешивание) основан на применении уравновешивающих грузов и пружин. В манипуляторе, показанном на рис. 3.6, применен такой уравновешивающий груз УГ, с помощью которого осуществляется разгрузка двигателей 2 и 3. Очевидный недостаток уравновешивания с помощью грузов состоит в увеличении массы манипулятора и соответствующем снижении быстродействия. Поэтому 52 Рис. 3.9. Кинематическая схема манипулятора МЭМ-10 СД: I–VII — звенья манипулятора; 1–7 — зубчатые колеса, соединенные с двигателями этих звеньев (СССР) Глава 3 Рис. 3.10. Манипулятор типа SCARA (Уральские технические системы, Россия) Устройство роботов 53 данный способ нашел применение только в достаточно медленно действующих манипуляторах небольшой грузоподъемности. Часто в качестве уравновешивающих грузов используются элементы конструкции самого манипулятора — тогда указанный недостаток исчезает. Примером такого решения является рассмотренная ранее компоновка звеньев манипулятора на рис. 3.8. Более универсальным вариантом пассивного уравновешивания является использование пружин. Например, в манипуляторе робота на рис. 3.6 вместо уравновешивающего груза может быть применена пружина. Именно такое решение использовано в некоторых последующих модификациях этого робота. Способ активного уравновешивания основан на применении для компенсации веса частей манипулятора простых нерегулируемых двигателей, действующих параллельно с основными и развивающих усилие, равное статической нагрузке от этих частей. 3.2.3. Кинематические схемы с управляемой деформацией Особую группу манипуляционных систем образуют манипуляторы с управляемой деформацией. На рис. 3.11 показаны варианты их принципов действия. Схема на рис. 3.11, а состоит из набора сферических дисков. В дисках имеются центральные отверстия и 4 отверстия по периферии. Через эти отверстия пропущены тросы, концы которых закреплены на последнем (верхнем) диске. Нижние концы периферийных тросов попарно присоединены к двум приводам, вращение которых вызывает деформацию всей конструкции и перемещение ее верхнего конца, на котором должен быть укреплен рабочий орган манипуляционной системы. Центральный трос соединен внизу с пружиной, которая осуществляет ее натяжение, центрируя всю систему дисков. Последовательное соединение нескольких таких наборов дисков со своей системой приводов позволяет создавать манипуляционные системы типа хобота, способные принимать волнообразные пространственные конфигурации и перемещать рабочий орган с обходом препятствий. На рис. 3.11, б показано аналогичное пространственно изгибающееся устройство, но на пневматике. Оно состоит из трех скрепленных эластичных трубок. Верхний конец трубок закрыт, а снизу подведен сжатый воздух. При одинаковом давлении во всех трубках устройство находится в вертикальном положении. При разных значениях давления в трубках оно изгибается в сторону трубок с меньшим давлением. Как и в предыдущем устройстве, последовательное соединение таких секций со своей системой подачи воздуха позволяет получать более сложные пространственные конфигурации с перегибами. На рис. 3.11, в приведены два примера звена манипуляционной системы, в котором применен биметаллический элемент, деформирующийся при нагревании пропускаемым через него электрическим током. В первой схеме реализуется поступательное перемещение конца звена, а во второй — вращательное. Манипуляционные системы составляются из таких последовательно соединенных элементов. В мик- 54 Глава 3 роприводах (см. разд. 4.8) нашли применение аналогичные электромеханические преобразователи на пьезоэлектрических пластинах. На рис. 3.11, г показан подвижный элемент, основанный на эффекте памяти формы. Этот эффект, которым обладают некоторые металлические сплавы, состоит в следующем. Если деформировать (согнуть, закрутить) стержень из такого материала, а затем нагреть его до определенной температуры, то деформация исчезнет, но при остывании стержня восстановится. На рис. 3.11, г показан пример такого подвижного элемента в виде пружины, которая при нагреве электрическим током осуществляет поступательное (х) или вращательное (ϕ) перемещение в зависимости от вида предварительной деформации пружины. а) б) в) г) Рис. 3.11. Кинематические схемы устройств с управляемой деформацией Общей особенностью приведенных на рис. 3.11 схем является то, что их элементы активные, т. е. в них подвижное звено манипулятора совмещено с приводом. Другая связанная с этим же особенность — эти схемы представляют собой системы с распределенными параметрами, т. е. не имеют конечного числа степеней подвижности. 3.2.4. Манипуляционные системы без подвижных частей Итак, в этом разделе мы рассмотрели следующие три типа кинематических схем, которые используются в механических манипуляторах: разомкнутые кинематические цепи из жестких звеньев (основной тип для совре- менных манипуляторов); кинематические цепи, включающие параллельно соединенные звенья; кинематические схемы с управляемой деформацией. Устройство роботов 55 Однако наряду с манипуляционными системами в виде механических манипуляторов существует пока еще не получивший достаточно широкого распространения другой тип манипуляционных систем — без подвижных частей. В них манипуляционные операции осуществляются с помощью электромагнитных и других силовых полей. Так, существуют устройства сварки электронным лучом в вакууме. Двухкоординатное перемещение луча при этом осуществляется с помощью электрического или магнитного поля. Аналогично работают устройства для сварки, резки и раскроя различных материалов лазерным лучом. (Они применяются наряду с лазерными роботами традиционной конструкции, в которых лазерный луч от генератора проходит внутри полого манипулятора.) Известны также системы управляемого перемещения и ориентации легких объектов в управляемом электромагнитном поле. 3.3. Рабочие органы манипуляторов Рабочие органы манипуляторов служат для непосредственного взаимодействия с объектами внешней среды и делятся на захватные устройства и рабочий инструмент. Рабочие органы могут быть постоянными и сменными, в том числе с возможностью их автоматической смены в ходе выполнения технологической операции. 3.3.1. Захватные устройства Захватные устройства предназначены для того, чтобы взять объект, удерживать его в процессе манипулирования и освободить по окончании этого процесса. Основные типы захватных устройств — это механические, пневматические и электромагнитные устройства-схваты. Кроме того, в связи с большим разнообразием объектов манипулирования существует и значительное количество различных комбинаций этих типов захватных устройств и множество специальных захватных устройств, основанных на различных оригинальных принципах действия (например, вакуумные присоски, клейкие захватные устройства, накалывающие, использующие аэродинамическую силу и т. п.). Схват — это аналог кисти руки человека. Самые простые двухпальцевые схваты напоминают обычные плоскогубцы, но снабженные приводом. На рис. 3.12 показана конструкция подобного схвата с пневматическим приводом. В зависимости от объектов манипулирования применяют схваты с тремя, четырьмя, пятью, реже с бо́льшим числом пальцев. На рис. 3.13 показан схват с пятью пальцами. В связи с простотой совершаемых схватами движений (зажим-разжим) в них обычно применяются пневматические и нерегулируемые электрические приводы. На рис. 3.14 показан пневматический схват с пятью гибкими надувными пальцами — за счет разной жесткости пальцев в сечении при подаче в них сжатого воздуха они изгибаются, захватывая находящиеся в их зоне предметы. Схваты часто очувствляют с помощью контактных датчиков силы, проскальзывания и дистанционных датчиков (ультразвуковых, оптических и др.), выявляющих предметы вблизи схвата и между его пальцами. 56 Глава 3 6 1 2 5 4 3 Рис. 3.12. Двухпальцевый схват: 1, 2 — пальцы (губки); 3, 4 — рычажная передача; 5 — шток пневматического двигателя (пневмоцилиндра); 6 — возвратная пружина Рис. 3.13. Схват с пятью пальцами (Shadow Robot Company, США) Устройство роботов 57 а) б) Рис. 3.14. Пневматический схват с пятью гибкими надувными пальцами: а — внешний вид; б — разрез пальца: 1 — тонкостенная часть; 2 — гофры; 3 — толстостенная часть; 4 — подвод воздуха; 5 — деформация оси пальца при подаче сжатого воздуха Распространенным типом захватных устройств являются вакуумные захватные устройства, использующие вакуумные присоски, которые удерживают объекты за счет разряжения воздуха при его отсосе из полости между присоской и захватываемым объектом (рис. 3.15). Для захватывания объектов сложной формы применяют вакуумные захватные устройства с несколькими присосками. Для взятия ферромагнитных объектов применяются магнитные захватные устройства, в основном, с электромагнитами, но имеются устройства и с постоянными магнитами (для высвобождения захваченного объекта они снабжены специальными механическими выталкивателями). Захватные устройства бывают универсальными и специальными (например, для работы с хрупкими и протяженными предметами, тканями и т. д.). 58 Глава 3 Захватные устройства часто присоединяют к последнему звену манипулятора через промежуточные, податливые конструктивные элементы. С их помощью осуществляется компенсация возможных неточностей позиционирования и устраняются возникающие при этом механические напряжения в звеньях манипулятора в случаях манипулирования объектами, на перемещение которых наложены механические ограничения (механическая сборка, установка заготовок в зажимы и гнезда технологического оборудования, перемещение предметов по направляющей и т. п.). Рис. 3.15. Робот-погрузчик SL280 с вакуумным захватным устройством (Фирма Smart Lift, Дания) 3.3.2. Рабочий инструмент В случаях, когда объектом манипулирования является рабочий инструмент, с помощью которого робот выполняет определенные технологические операции (нанесение покрытий, сварку, завинчивание гаек, зачистку поверхностей и т. п.), этот инструмент, как правило, не берется захватным устройством, а непосредственно крепится к манипулятору на его месте. Часто при этом к инструменту необходимо обеспечить пoдвoд энергии или какого-либо рабочего тела. Для окрасочного робота — это краска и воздух к пульверизатору, для сварочного робота — сварочный ток, проволочный электрод, газ, охлаждающая вода и т. д. Для этого создаются манипуляторы специальной конструкции. 3.4. Системы передвижения мобильных роботов Системы передвижения роботов, наряду с манипуляционными системами, относятся к их исполнительным системам. В них нашли применение практически все известные транспортные средства. Кроме того, предметом робототехники являются различные бионические способы передвижения (локомоций), заимствованные у живой природы и не освоенные еще в технике. К ним, прежде всего, относится Устройство роботов 59 шагание. Основной частью всех систем передвижения являются движители, преобразующие усилие от двигателей в усилие передвижения. По типу внешней среды средства передвижения подразделяются на наземные, водные, воздушные и космические, а по широте применения — на универсальные и специальные. Наземные универсальные системы передвижения — это, прежде всего, традиционные колесные и гусеничные транспортные средства, а также шагающие (стопоходящие). Первые наземные мобильные роботы были созданы для расширения рабочей зоны их манипуляторов, а также для выполнения чисто транспортных операций (внутрицеховой и другой транспорт). На рис. 3.16 и 3.17 показаны примеры мобильных роботов на колесном и гусеничном ходу соответственно. Рис. 3.16. Робот радиационной разведки «РТК-05» (ЦНИИ РТК, Россия) Рис. 3.17. Малогабаритный робототехнический комплекс «Капитан» (ЦНИИ РТК, Россия) 60 Глава 3 Промышленные роботы-робокары, предназначенные для выполнения только транспортных операций по перевозке грузов, часто не имеют манипуляторов, а снабжены упрощенными одно- и двухстепенными погрузочно-разгрузочными устройствами. Впрочем, операции погрузки/разгрузки могут также выполняться стационарными манипуляторами, находящимися в местах остановки этих роботов. На рис. 3.18 показан транспортный робот подвесного типа, который передвигается по монорельсовому пути. Внизу видны захватное устройство и защитная сетка, предохраняющая переносимый груз от самопроизвольного падения. На рис. 3.19 и 3.20 показаны примеры специальных средств передвижения роботов: для пере- Рис. 3.18. Подвесной транспортный промышленный робот ТРТ-1-2500: 1 — тележка; 2 — монорельс (ЦНИИ РТК, Россия) а) Рис. 3.19. Робот-стенолаз Roma (Universidad Carlos III, Испания) б) Рис. 3.20. Робот-труболаз для обследования трубопроводов: а — робот внутри трубы; б — робот вне трубы (ЦНИИ РТК, Россия) Устройство роботов 61 движения по вертикальным и наклонным поверхностям (с удержанием на вакуумных присосках) и для обследования трубопроводов (с передвижением путем поочередного закрепления одного из концов корпуса и изменения его длины) соответственно. Особый раздел робототехники составляют шагающие системы передвижения. Они являются предметом робототехники потому, что механические ноги — педипуляторы (от латинского слова pes, pedis, нога) — наиболее близки манипуляторам. Однако значение и потенциальные области применения шагающих машин выходят за пределы робототехники. Способ передвижения с помощью ног (шагание, бег, прыгание) широко распространен в живой природе, однако в технике он еще не получил заметного применения прежде всего из-за сложности управления. Развитие робототехники создало необходимую научно-техническую основу для реализации этого принципиально нового для техники способа передвижения и для создания нового типа транспортных машин — шагающих. Такой способ передвижения представляет основной интерес для движения по сложной пересеченной местности с препятствиями. Традиционные колесные и гусеничные транспортные машины оставляют за собой непрерывную колею, тратя на это значительно бо́льшую энергию, чем в случае передвижения шагами, когда взаимодействие с грунтом происходит только в местах упора стопы. Помимо этого шагающий способ передвижения обладает и большей проходимостью на пересеченной местности вплоть до возможности передвигаться прыжками и т. п. При шагающем способе также меньше разрушается грунт, что, например, важно в тундре. При передвижении по достаточно гладким и подготовленным поверхностям этот способ, конечно, уступает колесному в экономичности, скорости передвижения и простоте управления. Попытки создать шагающие аппараты предпринимались давно. Одна из первых моделей стопоходящей машины была создана в XIX веке математиком и механиком П. Л. Чебышевым. На рис. 3.21 показан четырехногий шагающий робот для сбора разлитых нефтепродуктов. На рис. 3.22 приведен пример шагающего роботаносильщика. Ноги робота имеют гидравлические приводы. Источник энергопитания — двигатель внутреннего сгорания. Хотя, как уже упоминалось, шагающий способ передвижения еще не получил практического применения на транспорте вследствие его сложности, в комбинации с другими, более традиционными способами, он уже используется. В частности, реализована комбинация колесного и шагающего способов передвижения в колесно-шагающих транспортных машинах. Применяются два варианта такой комбинации. В одном из них режимы качения и шагания осуществляются раздельно и последовательно с помощью отдельных приводов. Например, колеса устанавливаются на концах вертикальных рычагов подвески, которые могут поворачиваться на 360° относительно корпуса машины. При включении приводов этих рычагов машина передвигается на них, опираясь на колеса. При вертикальном положении рычагов подвески машина движется на колесах в режиме обычного качения. На рис. 3.23 показан образец мобильного робота с такой системой передвижения. 62 Глава 3 Рис. 3.21. Мобильный шагающий робот «Ортоног» (Волгоградский ГТУ, Россия) Рис. 3.22. Военный шагающий транспортный робот Big Dog (Boston Dynamics, США) Устройство роботов 63 Рис. 3.23. Колесно-шагающий робот Wark Partner (Rover Company, США) Во втором варианте оба режима — качение и шагание — осуществляются одновременно. Опоры механизма шагания выполняются в виде колес и перемещаются вперед относительно корпуса машины без отрыва от грунта. При этом колеса, вращаясь, участвуют в создании тягового усилия. Наряду с освоением способа передвижения шаганием ведутся научно-исследовательские работы по техническому освоению и другого способа наземного передвижения — ползания. Как и шагание, этот способ обладает уникальной универсальностью и проходимостью, включая возможность передвижения в воде и под землей. Трудности освоения этого способа передвижения аналогичны трудностям, связанным с освоением шагания и, вообще, всех способов передвижения живых организмов, и заключаются в сложности кинематики и алгоритмов управления. На рис. 3.24 показан образец ползающего змееподобного устройства. Рис. 3.24. Ползающий робот «Змеелок-2» (ЦНИИ РТК, Россия) Водные системы передвижения роботов основаны на традиционных средствах водного транспорта. На рис. 1.11 был показан один из первых отечественных подводных роботов «Манта», в котором использованы винтовые движители. 64 Глава 3 Новым направлением в создании систем передвижения роботов в воде является техническое освоение способов плавания живых организмов с помощью плавников и волнообразного движения всего тела. На рис. 3.25 показан экспериментальный образец плавучего средства с движителем, подобным рыбьему хвосту. К достоинствам таких средств плавания относятся их экологическая чистота, бесшумность и способность осуществлять позиционирование в заданной точке в условиях различных возмущающих воздействий со стороны внешней среды (течение, волнение и т. п.). Рис. 3.25. Робот-рыба Tuna (MTI, США) Воздушные системы передвижения, как и водные, развиваются по двум направлениям: во-первых, используются давно освоенные способы полета, а во-вторых, ведутся исследования по освоению машущих способов полета, известных в живой природе. На рис. 3.26 показан один из экспериментальных образцов подобного аппарата. Размах его крыльев — 10 см, время полета — до 3 мин. Рис. 3.26. Летательный аппарат с машущими крыльями Del Fly Micko (Technische Universiteit Delft, Нидерланды) Устройство роботов 65 Космические системы передвижения разделяются на системы для свободно летающих — в частности, орбитальных роботов, для роботов, обслуживающих прежде всего снаружи космические аппараты, и для напланетных мобильных роботов. Их достоинства — малые скорости вплоть до зависания. На рис. 3.27 показан пример свободнолетающего робота. Образец космического шагающего робота для наружного обслуживания космических станций приведен на рис. 3.28. Он представляет собой манипулятор, оба конца Рис. 3.27. Свободнолетающий космический робот Рис. 3.28. Космический манипулятор «Дорес» (ЦНИИ РТК, Россия) 66 Глава 3 которого являются рабочими органами в виде стыковочного устройства. С их помощью манипулятор шагает по расположенным на поверхности обслуживаемого объекта такелажным элементам, через которые он получает электроэнергию и осуществляет связь с пультом управления. На рис. 3.29 показан первый напланетный космический аппарат «Луноход», а на рис. 3.30 — марсоход. Рис. 3.29. Напланетный космический аппарат «Луноход» (СССР) Рис. 3.30. Марсоход Spirit (NASA, США) Устройство роботов 67 3.5. Сенсорные системы Эти системы в совокупности образуют показанную во введении (рис. В.1) единую информационно-измерительную систему, которая, подобно органам чувств живых существ, служит для обеспечения робота информацией об окружающей внешней среде и положении робота в ней. Датчики этих систем называются сенсорами. В различных системах роботов имеются также различные датчики, необходимые для их функционирования (датчики обратной связи в приводах, в источниках энергопитания и т. д.). Эти устройства ориентированы на внутренние параметры робота, не специфичны для него в целом и не относятся к сенсорам. По выявляемым свойствам и параметрам сенсорные системы роботов можно разделить на следующие группы: 1. Системы, дающие общую картину окружающей среды с последующим выделением ее отдельных объектов. 2. Системы, определяющие координаты местоположения робота и параметры его движения, включая его координаты относительно объектов внешней среды. 3. Системы, определяющие различные физико-химические свойства внешней среды и ее конкретных объектов. К сенсорным системам первой группы относятся системы технического зрения и различные локаторы. Вторая группа определяет параметры, относящиеся к самому роботу: его географические координаты в пространстве от спутниковых систем позиционирования типа GPS, ГЛОНАСС и др., инерциальных измерительных систем (ИИС) на основе гироскопов, акселерометров, одометров, магнитометрических систем и до измерителей координат относительно отдельных объектов внешней среды вплоть до фиксации соприкосновения с ними. Третья группа сенсорных систем наиболее многообразна: измерители геометрических параметров внешних объектов, плотности, температуры, оптических свойств, химического состава и т. д. В составе робота все эти сенсорные системы предназначены, прежде всего, для обслуживания двух исполнительных систем: передвижения и манипуляционной. Это и определяет основные требования к сенсорным системам: дальность действия, точность, быстродействие и т. д. Сенсорные системы, используемые в системах передвижения робота, подразделяются на системы, обеспечивающие навигацию в пространстве, и системы, обеспечивающие безопасность движения (предотвращение столкновений с препятствиями, опрокидывание на уклонах, попадание в недопустимые для робота внешние условия и т. п.). Сенсорные системы, обслуживающие манипуляторы, тоже образуют две группы: системы, входящие в контур управления движением манипулятора, и системы очувствления его рабочего органа. В число последних систем, в частности, часто входят размещенные у рабочего органа манипулятора системы технического зрения и датчики усилий. 68 Глава 3 3.5.1. Дальность действия сенсорных систем Важным параметром сенсорных систем является дальность действия. По этому показателю сенсорные системы роботов можно разделить на контактные, ближнего, дальнего и сверхдальнего действия. Контактные сенсорные системы служат для очувствления рабочих органов ма- нипуляторов и корпусов (бамперов) мобильных роботов. Они позволяют фиксировать контакт с объектами внешней среды (тактильные сенсоры), измерять усилия, возникающие в месте этого контакта (силовые сенсоры), определять проскальзывание объектов при их удержании захватным устройством манипулятора. Контактным сенсорным системам свойственна простота, но они накладывают существенные ограничения на динамику и, прежде всего, на быстродействие управления роботом. На рис. 3.31 показаны датчики силы. а) б) Рис. 3.31. Силовые датчики на пьезопреобразователях: а — трехкомпонентный силомоментный датчик 9328А (Kistler, Германия); б — шестикомпонентный силомоментный датчик Gamma (ATI, США) Тактильные сенсоры помимо получения информации о контакте могут применяться и для определения размеров и формы объектов путем их ощупывания. Важным требованием, предъявляемым к этим устройствам, является высокая чувствительность (срабатывание при усилии в единицы грамм), малые габариты, механическая прочность и надежность. Сенсорные системы ближнего действия обеспечивают робота информацией об объектах, расположенных в непосредственной близости от рабочего органа манипулятора или корпуса робота, т. е. на расстояниях, соизмеримых с их размерами. К таким системам относятся оптические локаторы и дальномеры, дистанционные измерители плотности грунта и т. п. Эти бесконтактные устройства технически сложнее контактных, но позволяют роботу выполнять задания с большой скоростью, заранее выдавая информацию о различных объектах и средах до соприкосновения с ними. Устройство роботов 69 Сенсорные системы дальнего действия служат для получения информации о внешней среде в объеме всей рабочей зоны манипуляторов робота и окружающей среды мобильного робота. Сенсорные системы сверхдальнего действия применяются главным образом в мобильных роботах. К ним относятся различные спутниковые и инерциальные навигационные системы, локаторы и другие сенсорные системы соответствующей дальности действия. Эти устройства находят применение и в стационарных роботах при работе с подвижными объектами, чтобы заранее предвидеть их появление в рабочей зоне. Сенсорные системы дальнего и сверхдальнего действия могут размещаться как на роботе, так и вне его (для получения информации со стороны). В бесконтактных сенсорных системах для получения требуемой информации используются излучаемые ими специальные сигналы (оптические, радиотехнические, ультразвуковые и т. д.) и естественные излучения среды и ее объектов. В зависимости от этого различают активные и пассивные сенсорные системы. Активные сенсорные системы имеют передатчик, излучающий первичный сигнал, и приемник, регистрирующий прошедший через среду прямой сигнал или вторичный сигнал, отраженный от объектов среды или сгенерированный ими под воздействием первичного сигнала. Пассивные системы имеют только приемное устройство, а роль излучателя играют сами объекты внешней среды. Поэтому пассивные сенсорные системы обычно проще и дешевле активных, но менее универсальны. Для некоторых применений важна также скрытность действия пассивных систем. Заметим, что все органы чувств человека являются пассивными. Однако у некоторых животных, у которых такого типа системы и, прежде всего, зрение не обеспечивают их необходимой информацией, существуют и активные сенсорные системы (летучие мыши, дельфины). 3.5.2. Системы технического зрения Для очувствления роботов наиболее широкое применение получили системы технического зрения, локационные, силомоментные и тактильные системы. Самыми универсальными из них являются системы технического зрения (СТЗ). Основные задачи, которые решают СТЗ: получение общей зрительной картины окружающей внешней среды; выделение в этой картине отдельных объектов и их распознавание, включая кла- стеризацию (разбиение на классы по близости по некоторым важным признакам), классификацию (отнесение к определенным заданным классам), верификацию (обнаружение конкретного искомого объекта); определение характеристик тех из выявленных объектов, которые нужны для выполнения роботом конкретных заданий. При решении последних задач СТЗ так же часто комплексируются с другими сенсорными системами. Кроме того, как ранее отмечалось, СТЗ применяются для визуализации выходной информации других типов сенсорных систем. 70 Глава 3 СТЗ могут быть: одномерными (линейка), двух- и трехмерными; монохромными (полутоновыми, черно-белыми); цветными. На рис. 3.32 показан типовой состав СТЗ: датчик (сенсор) изображения, устройство предобработки (последнее может быть объединено с датчиком в цифровой датчик) и процессор, выходная информация от которого поступает в систему управления и к человеку-оператору для дальнейшего использования. Датчик изображения Устройство предварительной обработки Процессор К системе управления и оператору Рис. 3.32. Схема системы технического зрения Основной тип СТЗ — это однопроцессорные системы, например, на базе персонального компьютера. Предобработка осуществляется специальным устройством ввода (цифровая плата с памятью изображения). Для повышения быстродействия, особенно при работе с достаточно сложными изображениями, переходят к многопроцессорным системам с разделением задач на подзадачи, которые можно решать параллельно. Существуют СТЗ и с последовательной (конвейерной) структурой. Они применяются для обработки больших массивов данных за длительный период времени. Датчиками изображения служат оптоэлектронные преобразователи (ОЭП), работающие обычно в диапазоне видимого света. Существуют так же ОЭП, работающие и в других диапазонах электромагнитного излучения: до видимого света — ИК и радио и после — УФ, рентгеновского и гамма-излучения. Преобразователь видимого света представляет собой телекамеру одного из двух типов: в виде вакуумных электронно-оптических приборов (иконоскопа), которые исторически появились первыми, и более современных твердотельных камер на основе ячеек с зарядной связью (ПЗС) или фотоэлементов (фотодиоды, фототранзисторы, фоторезисторы). Основными характеристиками датчиков изображения являются: разрешающая способность (разрешение по вертикали и по горизонтали); чувствительность (минимальная воспринимаемая освещенность); спектральная характеристика (диапазон частот регистрируемых электромагнит- ных колебаний). Изображения для СТЗ могут получаться так же и с помощью сканирующих дальномеров-локаторов (лазерных, микрорадиоволновых и др.). Обработка цифровых изображений, представляющих собой полученную от датчиков изображения совокупность строк и столбцов элементарных фрагментов изображения — пикселов (pixel — сокращение слов picture element, элемент изображения), производится в компьютерах, преобразующих их в цифровую форму. При Устройство роботов 71 этом каждый пиксел характеризуется интенсивностью (яркостью), представленную числом. Обычно используют однобайтовые (8-битовые) числа, дающие числовые значения от 0 до 255, реже — 10 битовые (1024 значения). В соответствии с указанным ранее функциональным составом, в СТЗ последовательно решаются следующие задачи обработки зрительной информации: предварительная обработка (фильтрация) видеоизображения, получаемого от датчика, с целью повышения качества изображения за счет освобождения его от шумов и других помех, включая изменение освещенности и тени, сглаживания, повышения контрастности с усилением границ объектов и их частей, преобразование аналогового сигнала в цифровой; сегментация, т. е. декомпозиция изображения с последовательным выделением отдельных объектов из общей картины, затем их частей и т. д. (обнаружение контуров, участков определенной текстуры и цвета); определение характеристик этих объектов, т. е. выделение признаков (дескрип- торов) для их последующего распознавания (выделение отрезков прямых, отверстий, округлостей, определение величины периметра, площади и т. п.); распознавание, т. е. кластеризация, классификация или верификация. При этом распознавание возможно и при неполной видимости части объектов. В этом случае выдвигается и проверяется несколько гипотез. Иногда может потребоваться и дополнительный осмотр объекта. Выбор отдельных признаков зависит от конкретной решаемой задачи и может быть иерархическим. (Так, при поиске автомашины на коллективной стоянке сперва ищется объект по цвету и марке, а окончательно, конечно, он определяется по номеру.) Кластеризация и классификация осуществляются на основе методов теории принятия решений по перечню признаков внешнего вида (в n-мерном пространстве признаков). При классификации возможно еще сопоставление с эталонами (образцами), представляющими отдельные классы объектов. Эти эталоны обычно являются обобщенными геометрическими или символьными моделями, сохраняющими только необходимые для распознавания характерные признаки (стол, стул). Основной метод сопоставления с эталонными геометрическими моделями как и верификации — это совмещение структур изображения и модели (обычно по двум характерным точкам) с предварительным масштабированием и ориентацией (поворотом) изображения. Трехмерные изображения объектов обычно распознаются по их двухмерным проекциям, а третья координата служит для определения взаимного расположения объектов. Вместе с тем существуют методы и объемного распознавания. В частности, известен метод совмещения 3D-изображений с 3D-геометрическими моделями, образованными из примитивов типа цилиндра, параллелепипеда и т. п. (Здесь совмещение производится уже по трем характерным точкам.) Вычислительные методы обработки изображений развиваются уже более 30 лет. Вначале это делалось на больших ЭВМ, затем, с появлением персональных компь- 72 Глава 3 ютеров, они стали основным аппаратным обеспечением для обработки изображений. В настоящее время существуют десятки программ обработки изображений и распознавания образов, в том числе лиц, отпечатков пальцев, рукописных текстов, номеров автомашин, штрихкодов. Многие из них работают в реальном масштабе времени. Как правило, все они предполагают предварительный этап обучения (с учителем или самообучение). Наряду с перечисленными задачами в СТЗ конкретного назначения могут решаться еще и различные сопутствующие задачи. К ним, прежде всего, относятся сжатие информации и ее хранение. Что касается последнего, то для решения задачи распознавания необходима база данных изображений эталонов и прототипов, классифицированных по характерным геометрическим и словесным признакам. Заметим, что большинство способов и приемов обработки изображений в СТЗ аналогичны существующим в живой природе и подсказаны физиологами и психологами. По мере усложнения задач, решаемых робототехническими системами, соответственно увеличивается и количество сенсорных систем. При этом отдельные сенсорные системы могут использоваться как для решения не связанных друг с другом автономных задач, так и объединяться в комплексы для решения общих задач. Последний вариант, очевидно, является наиболее сложным алгоритмически, поскольку требует системного подхода к совместному функционированию нескольких сенсорных систем. Простейшие примеры такого комплексирования — это дополнение 1 2 3 4 5 Рис. 3.33. Очувствленный схват: 1 — манипулятор; 2 — силомоментный датчик; 3 — замок; 4 — видеокамера; 5 — трехпальцевый схват (ABB, Швейцария) Устройство роботов 73 системы технического зрения каким-либо дальномером для получения с требуемой точностью информации о дальности или совместное использование получаемой от соответствующих сенсорных систем информации о положении рабочего органа манипулятора и об усилии, с которым он воздействует на объекты внешней среды. Последнее необходимо при выполнении технологических операций, требующих позиционно-силового управления манипулятором (шлифовка поверхности и т. п.). Конструктивно сенсорные устройства размещают на рабочих органах манипуляторов, на корпусе робота или вне робота. На рис. 3.33 показан пример очувствленного манипулятора. 3.6. Способы и устройства управления робототехническими системами В робототехнике существуют три задачи управления: управление манипуляторами, системой передвижения и совместное управление группами роботов. Применяемые для решения этих задач способы управления можно классифицировать следующим образом: по степени участия человека в процессе управления различают системы: автома- тического, автоматизированного и ручного управления; по способу автоматического управления различают, как уже отмечалось ранее, системы программного, адаптивного и интеллектуального управления; по характеру движения существуют системы управления непрерывные и дис- кретные (шагами «от точки к точке»); по виду управляемых переменных различают системы управления положением, скоростью и силой (моментом), а также их комбинациями. Указанные способы управления часто применяются в комбинации — разные способы по разным координатам или иерархически путем последовательного перехода от одного способа управления к другому. Реализуются аппаратно эти способы устройствами управления. Устройство управления (управляющее устройство) робота осуществляет управление его исполнительными системами: манипуляционными и передвижения, образуя в совокупности систему автоматического управления робота в целом. Кроме того, устройства управления роботов часто используют и для управления другими объектами (технологическим оборудованием, транспортными устройствами и т. п.), которые работают совместно с роботом, образуя с ним единый технологический комплекс, а также для связи с человеком-оператором, в том числе для осуществления процесса управления роботами от него. При этом для оператора в устройствах управления могут быть предусмотрены различные средства управления. Устройства управления могут быть индивидуальными, входящими в состав каждого робота, и групповыми, управляющими несколькими роботами. Конструктивно индивидуальные устройства управления выполняют обычно отдельно от механиче- 74 Глава 3 ской части робота, значительно реже в общем с ним корпусе, а у мобильных роботов обычно такое устройство состоит из двух частей: бортовой и входящей в состав пульта оператора (или в дополнение к нему). Подавляющее большинство роботов имеют электронные устройства управления, выполненные на микропроцессорной базе. Однако существуют и неэлектрические устройства управления роботами, чаще всего реализуемые на пневмонике и пpeдназначенные для применения в особых взрывоопасных условиях. Управлению роботами посвящены главы 6–12. 3.7. Особенности устройства других средств робототехники Как уже отмечалось, предметом робототехники, наряду с собственно роботами, является также ряд близких роботам технических устройств. К ним, в частности, относятся рассмотренные ранее различные автоматические транспортные средства и неавтоматические манипуляторы. Последние включают, в частности, упомянутые во введении управляемые оператором копирующие манипуляторы и сбалансированные манипуляторы, которые широко применяются на погрузочно-разгрузочных операциях. На рис. 3.34–3.36 приведены типовые конструкции таких манипуляторов. В большинстве случаев они имеют шарнирную кинематику. В сбалансированных манипуляторах осуществлено автоматическое уравновешивание (балансировка) груза аналогично тому, как это часто делается и в манипуляторах роботов. Благодаря этому оператор с помощью рукоятки, укрепленной на захватном устройстве манипулятора, без усилия может перемещать взятый груз в рабочей зоне манипулятора. На рис. 3.34 показан сбалансированный манипулятор грузоподъемностью 150 кг. На поворотном устройстве 2 колонки 1 расположена приводная головка 3 с электроприводом поворота в вертикальной плоскости звена 4. Звено 4 включает пантограф, который обеспечивает сохранение вертикального положения звена 5 при поворотах звена 4 в вертикальной плоскости. На конце звена 5 установлены поворотная головка 6 с рукояткой управления 7, зажим 8 и закрепленное в нем захватное устройство 9. Рычажная система манипулятора сбалансирована с помощью пружинного устройства, расположенного в приводной головке 3. Оператор управляет манипулятором с помощью рукоятки 7. При ее повороте вверх привод перемещает захватное устройство вверх, а при повороте вниз — соответственно вниз. Скорость перемещения при этом пропорциональна величине поворота рукоятки. При нейтральном положении рукоятки захватное устройство останавливается и удерживается в этом положении. В горизонтальной плоскости манипулятор перемещается за счет мускульной силы оператора. Однако усилие здесь требуется небольшое — только на преодоление силы трения и инерции. Сбалансированные манипуляторы проще и значительно дешевле роботов. Хотя они не высвобождают рабочих подобно роботам, но позволяют ликвидировать тяжелый ручной труд, поскольку грузоподъемность сбалансированных манипуляторов — Устройство роботов 75 4 3 5 2 6 7 8 1 9 Рис. 3.34. Электромеханический сбалансированный манипулятор Рис. 3.35. Пневматический сбалансированный манипулятор 76 Глава 3 Рис. 3.36. Гидравлический сбалансированный манипулятор до нескольких тонн. Манипуляторы грузоподъемностью свыше 250 кг имеют гидравлический привод, при грузоподъемности 100–250 кг — электрический, при меньшей грузоподъемности — пневматический привод. Более совершенными манипуляторами, управляемыми человеком-оператором, являются копирующие манипуляторы (см. рис. 1.4). Управление копирующим манипулятором осуществляется с помощью кинематически подобного ему задающего манипулятора, у которого на месте рабочего органа находится рукоятка. Оператор своей рукой перемещает эту рукоятку, а копирующий манипулятор при этом повторяет — копирует — движения всех звеньев задающего манипулятора. ГЛАВА 4 ПРИВОДЫ РОБОТОВ 4.1. Классификация приводов Привод — это компонент роботов, входящий в состав его исполнительных систем: манипуляционной и передвижения (мотор-колесо, гусеница). Приводы преобразуют какой-либо вид энергии в механическое перемещение, т. е. с их помощью робот совершает работу. Привод, как известно, включает двигатель и устройство управления им. Кроме того, в его состав могут входить механизмы для преобразования и передачи движения (редукторы, преобразователи вращательного движения в поступательное и наоборот), тормоз и муфта. К приводам, применяемым в роботах, предъявляют весьма жесткие специфические требования. В связи с необходимостью встраивания приводов в исполнительные системы робота габариты и масса приводов должны быть минимальными. Приводы в роботах работают в неустановившихся режимах и с переменной нагрузкой. При этом переходные процессы в них должны быть практически неколебательными. Важными показателями приводов роботов являются также надежность, стоимость, удобство эксплуатации. Запросы, предъявляемые к их способу управления, быстродействию и точности, определяются соответствующими требованиями к роботу в целом, рассмотренными в разд. 3.1. В роботах нашли применение практически все известные типы приводов и, прежде всего, электрические, гидравлические и пневматические. Кроме того, в приводах мобильных роботов используются двигатели внутреннего сгорания, реактивные и другие типы транспортных двигателей. Приводы бывают с поступательным и вращательным движением, регулируемые (по положению и скорости) и нерегулируемые, непрерывного и дискретного действия. На рис. 4.1 приведена типовая схема позиционного привода манипулятора. Наряду с общей обратной связью по положению в схеме, в приводе имеется также обратная связь по скорости, которая играет роль корректирующей гибкой обратной связи и может, кроме того, служить для управления скоростью. В тех случаях, когда меха- 78 Глава 4 низм М является редуктором и понижает скорость, датчик скорости ДС выгоднее ставить не так, как показано на схеме, а на выходе двигателя Д перед механизмом, чтобы увеличить величину сигнала по скорости. Устройство управления может быть непрерывного действия, релейным, импульсным или цифровым. Рис. 4.1. Типовая схема позиционного привода манипуляторов: Д — двигатель; М — механизм передачи и преобразования перемещения; ДП, ДС — датчики положения и скорости; УУП1, УУП2 — составные части устройства управления УУП Применение пневматических приводов в робототехнике объясняется их деше- визной, простотой и, соответственно, надежностью. Правда, эти приводы плохо управляемы и поэтому используются в основном в приводах с простым дискретным управлением грузоподъемностью до 10 кг, реже до 20 кг. Гидравлические приводы наиболее сложны и дороги по сравнению с пневмати- ческими и электрическими. Однако при мощности 2000 Вт и выше они обладают наилучшими массогабаритными характеристиками и поэтому являются основным типом привода для тяжелых и сверхтяжелых роботов. Гидравлические приводы имеют хорошее быстродействие и точность, поэтому они нашли также применение и в роботах средней грузоподъемности, когда требуются высококачественные динамические характеристики. Электрический привод, несмотря на хорошую управляемость, простоту подвода энергии и высокий КПД, имеет худшие массогабаритные характеристики. Прогрессивное увеличение в последние годы доли электромеханических роботов в общем парке роботов в мире вызвано быстрым прогрессом в совершенствовании электрических двигателей, специально созданных для роботов. Основные области применения электрических приводов в робототехнике — это роботы средней грузоподъемности (десятки килограмм), легкие роботы с высококачественным управлением и мобильные роботы. 4.2. Пневматические приводы В пневмопривод входят двигатель, распределительное устройство, подающее воздух в двигатель, и регулятор скорости привода за счет регулирования расхода воздуха. Двигатель может быть как поворотным, так и поступательного движения Приводы роботов 79 (пневмоцилиндр). Пневмоцилиндр состоит из гильзы, выполненной из прецизионной трубы обычно с фторопластовой накладкой внутри, поршня с уплотнением, которое имеет малое трение по фторопласту, и штока. Поршень со штоком, присоединенным к нагрузке двигателя, движется под действием сжатого воздуха, подаваемого в полость цилиндра с одной стороны поршня. Полость, расположенная с другой стороны поршня, соединяется при этом с атмосферой для выпуска воздуха, сжимаемого движущимся поршнем. Направление движения поршня со штоком зависит от того, с какой стороны от поршня подается сжатый воздух. Внешний вид некоторых пневмоцилиндров показан на рис. 4.2. Рис. 4.2. Пневмоцилиндры (FESTO, Германия) Применяемые в роботах поворотные пневматические двигатели имеют ограниченный угол поворота (неполноповоротные двигатели). Их подвижная часть представляет собой лопасть, укрепленную на выходном валу и расположенную в кольцеобразном корпусе. Внутри корпуса имеется перегородка, с двух сторон которой образуются полости для воздуха, разделенные подвижной лопастью. Распределительное устройство, управляющее подачей воздуха в двигатель, выполнено на основе золотников или клапанов обычно с электромагнитным приводом, управляющие сигналы на которые поступают от устройства управления робота. Пневматические двигатели работают на сжатом воздухе давлением 0,3–0,6 МПа. Сжатый воздух поступает на приводы от общего блока питания, который состоит из аппаратуры подготовки воздуха и редуктора. Подготовка воздуха заключается в его очистке от влаги и других примесей и внесении распыленного масла для смазки трущихся поверхностей двигателя. Редуктор обеспечивает поддержание определенного давления воздуха на входе привода. Сжатый воздух на вход блока питания поступает обычно из общей пневмосети, запитанной от компрессора (компрессорной станции). В мобильных роботах воздух поступает из баллонов, в которых он находится под повышенным давлением. В настоящее время подавляющее большинство пневмоприводов роботов имеют простейшее цикловое управление. При этом привод перемещается из начального 80 Глава 4 положения сразу в конечное, которое определяется механическим упором, установленным на подвижной части привода (на штоке пневмоцилиндра или на выходном валу поворотного двигателя). Упор находит на демпфер, который гасит энергию движения, обеспечивая безударное торможение привода. Одновременно с этим прекращается подача воздуха в двигатель. Демпферы в пневмоприводах применяются в основном гидравлические, а для маломощных приводов — более простые, пружинные. Прибегают также к способу торможения противодавлением, при котором демпфер не требуется, а торможение происходит за счет переключения подачи воздуха в момент торможения из одной полости двигателя в другую, выхлопную, т. е. встречно движению поршня (или лопасти в поворотном двигателе). Задание величины перемещения осуществляется перестановкой упора. Благодаря тому, что конечное положение двигателя определяется механическим упором, приводы с цикловым управлением имеют значительно более высокую точность, чем при обычном позиционном управлении с обратной связью по положению (погрешность менее 0,1 мм), и повышенное быстродействие (скорость перемещения — несколько метров в секунду). Существуют конструкции пневмоприводов и с несколькими выдвижными упорами, которые последовательно в соответствии с программой выставляются на пути упора, укрепленного на подвижной части двигателя. В результате осуществляется позиционирование привода в промежуточных точках, определяемых положением этих выдвижных упоров. Такой способ позиционирования может быть реализован, например, с помощью размещенного вдоль пневмоцилиндра барабана с упорами, расположенными по длине барабана со смещением относительно друг друга по углу (как бы, по винтовой линии). В результате при повороте барабана на пути упора, перемещающегося со штоком двигателя, последовательно оказываются упоры барабана от первого до последнего. Движение барабана, естественно, должно быть синхронизировано с движением штока двигателя. Существуют также конструкции подобных приводов с выдвижными упорами, снабженными индивидуальными приводами. Принципиально возможно позиционирование пневмоприводов и с помощью позиционного управления с обратной связью по положению. Однако из-за сжимаемости воздуха такое управление имеет значительно худшую точность, чем при использовании упоров. Другим вариантом дискретного позиционного пневмопривода является дискретный привод, состоящий из последовательно соединенных нескольких цикловых пневмоприводов с различающимися (вдвое) значениями перемещения. Включая эти цикловые приводы в разной комбинации, можно получать соответственно разное суммарное перемещение из конечного числа его дискретных значений. Например, три таких привода дают в совокупности 8 точек позиционирования, четыре привода — 16 точек и т. д. На рис. 4.3 показан один из первых отечественных серийных пневматических промышленных роботов МП-9С, а на рис. 4.4 — его пневматическая схема. Робот получил широкое применение на сборочных операциях и для обслуживания прессов. Сжатый воздух из пневмосети поступает через запорный муфтовый вентиль 1, влагоотделитель 2, регулятор давления 3 и маслораспылитель 5 к электропневмати- Приводы роботов 81 Рис. 4.3. Пневматический промышленный робот МП-9С (ЦНИИ РТК, Россия) Рис. 4.4. Пневматическая схема робота МП-9С ческим нормально закрытым клапанам 7–13. Давление в системе контролируется с помощью манометра 4. При включении клапана 7 воздух поступает в пневмоцилиндр 17 схвата — пальцы схвата сближаются и зажимают объект. При отключении клапана 7 воздух из пневмоцилиндра 17 стравливается в атмосферу, и поршень под действием пружины возвращается в исходное положение. При включении клапанов 8, 10, 12 воздух поступает соответственно к пневмоцилиндрам поворота манипулятора, подъема манипулятора и выдвижения схвата, а через клапаны 9, 11, 13 и дроссели 6 стравливается в атмосферу. С помощью этих дросселей регулируется скорость поршней пневмоцилиндров и, соответственно, звеньев манипуляторов. 82 Глава 4 4.3. Гидравлические приводы Как было отмечено в разд. 4.1, гидроприводы нашли основное применение в роботах большой грузоподъемности, а также в роботах средней грузоподъемности, когда требуется особо качественное управление. Гидропривод состоит из тех же основных частей, что и пневмопривод. Основой его является двигатель поступательного (гидроцилиндр) или углового движения (поворотный гидродвигатель), которые устроены подобно аналогичным пневматическим двигателям, только вместо сжатого воздуха в них используется жидкость (обычно масло) под давлением до 20 МПа. Соответственно, с бо́льшим по сравнению с пневмоприводом давлением создается и на два порядка большее усилие. Несжимаемость жидкости обеспечивает при этом гидроприводам значительно лучшие динамические и точностные характеристики, чем у пневмоприводов. Управление гидравлическими двигателями осуществляется тоже с помощью золотников и клапанов, которые имеют обычно электрическое управление, т. е. представляют собой электрогидравлические усилители (ЭГУ). Гидроприводы чаще всего имеют непрерывное управление. В отличие от пневмопривода, гидропривод имеет собственный блок питания, входящий в состав робота. Этот блок состоит из гидронасоса, фильтра, регулятора давления, устройства охлаждения (обычно водяного) и масляного аккумулятора с запасом масла. На рис. 4.5 показан внешний вид гидравлических приводов (гидроцилиндров), а на рис. 4.6 — пример гидравлического промышленного робота. Как можно видеть, этот робот состоит из трех частей: манипулятора, насосной станции (слева) и устройства управления. Рис. 4.5. Гидроцилиндры (Escort, Россия) Приводы роботов 83 Рис. 4.6. Гидравлический промышленный робот для нанесения покрытий краскораспылителем Coat-a-matic (Retab, Швеция) 4.4. Электрические приводы В настоящее время, как было отмечено, это самые распространенные в робототехнике приводы. В роботах применяются электроприводы постоянного тока: традиционные коллекторные и бесколлекторные (вентильные), асинхронные с частотным управлением и нерегулируемые, шаговые, а также приводы на основе различного типа регулируемых муфт в сочетании с нерегулируемым двигателем, и на основе электромагнитов. В основном применяются электроприводы с угловым перемещением, т. е. вращающиеся. Однако в звеньях манипуляторов с поступательным перемещением наряду с вращающимися двигателями в комбинации с механизмами, преобразующими вращательное движение в поступательное (обычно это шариковинтовые преобразователи), нашли применение и специальные вентильные линейные приводы. Электроприводы включают электродвигатель, снабженный датчиками обратной связи по положению и скорости, механическую передачу, часто тормоз, иногда муфту (например, для защиты двигателя от перегрузки) и устройство управления (см. рис. 4.1). Перспективными типами электрических приводов для роботов стали высокомоментные безредукторные двигатели и приводы с непосредственным цифровым управлением. Примеры электромеханических промышленных роботов были приведены на рис. 3.6 и 3.8. 84 Глава 4 4.5. Рекуперация энергии в приводах Приводы роботов работают в основном в переходных режимах разгон-торможение. Поэтому одним из способов экономии энергии у них может служить использование идеи рекуперации энергии. Это особенно важно для мобильных роботов с автономным энергопитанием. Кроме того, при этом часто повышается и быстродействие. Рекуперация энергии основана на ее запасании в процессе торможения и отдаче при последующем разгоне. Существуют два основных способа такого запасания энергии: запасание механической энергии (с помощью маховиков, пружин) и электрической (в аккумуляторах, конденсаторах, индукционных катушках). На рис. 4.7 приведен пример электрического привода с рекуперацией электрической энергии [4]. Энергия, которая возвращается в источники питания в режиме рекуперативного торможения, запасается в индуктивности L, когда двигатель переходит в генераторный режим. Ключи К2, К4 предназначены для реверсного управления двигателем от двухполюсного источника Е1, Е2, а ключи К1, К3, К5, К6 — для осуществления режима рекуперации. В режиме движения под действием двигателя Д ключи К1 и К6 замкнуты, а ключи К3 и К5 разомкнуты. Режим рекуперации включается при торможении, когда знаки производной от заданной скорости и скорости двигателя разные. Для этого устройство управления размыкает ключи К1 и К6, замыкает К3, К5 и инвертирует К2 и К4. Аналогичные схемы разработаны и с использованием в качестве накопителей энергии конденсаторов. Рис. 4.7. Схема системы управления приводом мобильного робота с рекуперацией энергии: Д — двигатель; Е1, Е2 — источники напряжения постоянного тока; УУ — устройство управления; ДС — датчик скорости; К — ключи; L — индуктивность Приводы роботов 85 4.6. Искусственные мышцы Современные приводы, применяемые в робототехнике, основаны, прежде всего, на идеях XIX века и давно исчерпали свой потенциал. По своим массогабаритным параметрам они значительно уступают поперечно-полосатым мышцам животных и человека, что, в частности, конечно, затрудняет протезирование. Поэтому в робототехнике уже много лет развивается направление по созданию принципиально новых приводов, получившее название «искусственная мышца». Одна из очевидных причин значительно большей массы у современных приводов по сравнению с мышцами — наличие в их конструкции металлов, особенно ферромагнитных в электрических двигателях. Поэтому первыми разработками приводов, получивших название искусственных мышц, были пневматические приводы, в которых цилиндр с поршнем заменялся эластичной трубкой из резины или полимеров в нейлоновой оплетке. При подаче в трубку воздуха под давлением она, раздуваясь, сокращается примерно на треть длины, имитируя работу мышцы. Такие приводы имеют в 3–4 раза меньшую массу, чем пневматические цилиндры той же мощности, и поэтому они нашли применение, прежде всего, в протезах конечностей. Источником сжатого газа для них служат обычно одноразовые баллончики. 1 2 3 Рис. 4.8. Реверсивный гибкий пневматический привод: 1 — пневматический двигатель; 2 — трос; 3 — выходной блок (Bridgstone, Япония) На рис. 4.8 приведен пример такого реверсивного привода. Устройство состоит из двух пневматических двигателей одностороннего действия. При повышении давления в одном из них и одновременном понижении на ту же величину в другом первый привод сокращается, а второй — удлиняется. В результате происходит поворот блока, который связан со звеном манипулятора. Выполненный на таких приводах пятистепенной манипулятор робота Softarm имеет грузоподъемность 3 кг при массе 5,5 кг и погрешность позиционирования 1,5 мм. Разновидностью пневматических искусственных мышц являются аналогичные устройства с заменой оплетки продольными тяговыми нитями. Такие конструкции имеют несколько лучшие тяговые характеристики и развивают большие усилия. Еще бóльшие тяговые усилия можно получить при замене газа жидкостью под давлением, т. е. при переходе к гидравлическим искусственным мышцам. Такие мыш- 86 Глава 4 цы обладают также более высокой точностью позиционирования и лучшей динамикой, как и все гидравлические приводы по сравнению с пневматическими. В среднем описанные искусственные мышцы по сравнению с традиционными приводами (цилиндрами) в три раза легче, в два раза меньше по габаритам и развивают в десятки раз большее усилие на единицу веса. В настоящее время в мире ведутся интенсивные исследования и разработки искусственных мышц, основанные на других физических принципах. В частности, электромагнитная искусственная мышца состоит из многовитковой обмотки, сжатой в жгут, в котором проводники с электрическим током противоположного направления прижаты друг к другу. При пропускании по ним тока они вследствие электромагнитного силового взаимодействия расходятся в поперечном направлении, в результате чего длина жгута сокращается. Один из первых вариантов электростатической искусственной мышцы представляет собой цилиндр, по оси которого расположен центральный электрод, а по образующим — соединенные друг с другом гибкие периферийные электроды. При подаче на центральный и периферийный электроды электрического потенциала возникает электрическая сила, которая отталкивает периферийные электроды от центрального. В результате периферийные электроды изгибаются, вызывая сокращение мышцы. Другой вариант электростатической мышцы выполнен в виде столбика, собранного из тонких металлических дисков, разделенных упругими изолирующими прокладками. Все нечетные и все четные диски соединены. При подаче на них электрического напряжения разной полярности диски сближаются, сжимая изолирующие прокладки, и мышца сокращается. Наибольшие успехи достигнуты в разработке электростатических искусственных мышц из электроактивных полимеров, деформирующихся в электрическом поле. Так, силиконовые и акриловые пластины толщиной в десятки микрометров под действием напряжения в несколько киловольт расширяются перпендикулярно полю в 2–3 раза, создавая усилия в десятки ньютон. Линейный привод, выполненный из такой пленки и покрытый с двух сторон эластичными электродами, представляет собой цилиндрическую пружину. При приложении к пленке электрического напряжения цилиндр удлиняется. Аналогичные приводы разрабатываются на основе ионных полимеров и полимерно-металлических композитных материалов. В электрическом поле молекулы этих материалов ионизируются и испытывают механические силы, которые вызывают деформацию материала в направлении, перпендикулярном градиенту электрического поля. На этом принципе был создан, в частности, пятипальцевый схват для манипуляторов [4]. Разрабатываются также искусственные мышцы на базе различных искусственных волокон, деформируемых под действием химических реагентов. Однако для всех них характерно низкое быстродействие (секунды) и величины хода (деформации) не более 10–15%. Приводы роботов 87 4.7. Микроприводы Развитие микроробототехники в первую очередь потребовало создания соответствующих микроприводов. Для этого, наряду с миниатюризацией традиционных двигателей, разрабатываются совершенно новые приводы для микроперемещений, основанные на использовании управляемых гибких деформаций (см. рис. 3.11). Одним из таких перспективных типов микроприводов являются пьезоприводы. На рис. 4.9, а показана схема основного элемента такого привода — пьезопреобразователя электрической энергии в энергию механического перемещения [5]. Он представляет собой пакет из пьезокерамических шайб 1 с нанесенными на торцы электродами. При подаче на них электрического напряжения за счет обратного пьезоэлектрического эффекта в зависимости от полярности приложенного напряжения происходит увеличение или уменьшение толщины шайб. На рис. 4.9, б показан другой тип таких преобразователей, основанный на изгибных деформациях многослойных пьезоэлектрических пластин. Такие преобразователи имеют больший ход, чем использующие деформацию расширения-сжатия, но худшие точностные и силовые характеристики. а) б) 5 4 1 6 2 1 3 3 2 Рис. 4.9. Пьезоэлектрические преобразователи микроприводов: а — с поступательной деформацией растяжение-сжатие: 1 — пьезокерамические шайбы; 2 — фланец; 3 — шпилька; 4 — гайка; 5 — пластмассовая втулка; 6 — слюдяная шайба; б — с изгибной деформацией: 1, 2 — пьезоэлектрические пластины; 3 — металлическая рессора Величина перемещения на выходе таких электромеханических преобразователей (ход) — доли миллиметра, скорость — до 2 м/с, погрешность управляемого позиционирования — доли микрометров, усилие — сотни ньютон, мощность — десятки ватт. Из таких преобразователей создаются трехстепенные микроманипуляционные системы. Они часто комбинируются с обычными электромеханическими манипуляционными системами. Последние обеспечивают перемещение в десятки миллиметров с погрешностью, перекрываемой микроманипуляционной системой. Получается манипулятор, состоящий из последовательно соединенных систем грубого и точного позиционирования, рабочий ход которого определяется первой системой, а точность — второй. Помимо пьезоэлектрических существуют микроприводы, основанные на других принципах действия: пьезомагнитные, электро- и магнитострикционные, биметаллические, на эффекте памяти формы, электростатические. 88 Глава 4 Для мобильных микророботов, предназначенных для передвижения в узких полостях (трубопроводы, желудочно-кишечный тракт и кровеносные сосуды человека и т. п.), разработаны специальные микродвижители, реализующие способ передвижения, подобный используемому гусеницами и червями. Подобная система передвижения на пьезоприводах состоит из нескольких пьезоэлектрических сегментов, соединенных центральным стержнем из того же материала. Поступательное перемещение осуществляется путем удлинения центрального стержня, а поперечно расширяющиеся за счет пьезоэффекта сегменты выполняют функции фиксаторов. Частота импульсов движения: 10–20 МГц. Существуют аналогичные системы, основанные и на пневматике. На переднем и заднем концах такого микроробота имеются фиксаторы, которые попеременно закрепляются на стенках полости. Корпус робота попеременно удлиняется при закрепленном заднем конце и сокращается при закрепленном переднем. Основные уже определившиеся области применения микроприводов и основанных на них микроманипуляторов и микророботов — это технологические микрооперации в промышленности (сборка, микрообработка, сварка и т. п.), биологические и фармакологические технологии, медицина (осмотр внутренних полостей, доставка туда лекарств, хирургические операции). ГЛАВА 5 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ РОБОТОВ 5.1. Основные принципы организации движения роботов Робот и другие средства робототехники — это типичные динамические системы, работающие в основном в неустановившихся режимах. С точки зрения математического описания и аналитического изучения они представляют определенные трудности в силу значительного числа степеней подвижности, нестационарности, нелинейностей и высокого порядка описывающих их уравнений. Поэтому основными методами изучения и проектирования роботов являются компьютерное моделирование и физический эксперимент. Прежде чем приступить к математическому описанию роботов, рассмотрим общие принципы, которыми следует руководствоваться при оценке (анализе и синтезе) систем управления роботов. Сделаем это применительно к наиболее сложной части роботов — манипуляторам. 1. Принцип максимального соответствия вынужденных управляемых движений свободным. Иными словами, механическую часть и приводы следует выбирать, исходя из типовых движений, которые должен совершать манипулятор, чтобы его управляемые движения реализовывались наиболее экономно и обеспечивали высокое качество движения. Например, в разд. 3.2 при описании систем координат манипуляторов было показано, какие типы движений наиболее просто реализуются в каждой из возможных систем координат. 2. Последовательное разделение движений. Этот принцип можно рассматривать как частное решение общего противоречия между сложностью действий и точностью их выполнения, когда с возрастанием сложности неизбежно падает точность. Управляемое движение целесообразно разделить на две фазы: грубую и точную. Как было отмечено в главе 2, в движениях человека тоже можно четко выделить две составляющие: быстрое, но неточное, «баллистическое» движение и медленное, более точное и осмысленное, контролируемое движение в завершающей фазе. Такое разделение и является компромиссом при выполнении противоречивых требований к быстроте и точности движения. Движения роботов на 90 3. 4. 5. 6. 7. Глава 5 этих этапах следует строить, оперируя разными критериями качества и, соответственно, разными способами управления. Например, при приближении рабочего органа манипулятора к объекту, с которым предстоит выполнение какой-либо технологической операции, возможен переход от программного управления к адаптивному по относительным координатам, связанным с этим объектом. Аналогично, при управлении передвижением мобильного робота по мере приближения его к месту остановки обычно переходят от управления скоростью к позиционному управлению. Параллельное разделение движений. Движения по отдельным степеням подвижности должны быть согласованы, исходя из задачи общего движения робота. Требования, предъявляемые к результирующему движению (по точности, быстродействию, грузоподъемности и т. п.), должны быть оптимально распределены между составляющими, которые реализуются с помощью отдельных приводов. Например, целесообразно выбирать кинематику манипулятора таким образом, чтобы требования к качеству управления по степеням подвижности, которые определяют грузоподъемность всего манипулятора, были наиболее облегченными, и, наоборот, чтобы были максимально разгружены приводы, обеспечивающие заданную точность позиционирования. Аналогично следует подходить и к разделению требований к быстродействию. Сочетание различных способов управления. Различные способы управления движением: автоматическое, программное, адаптивное, интеллектуальное и от человека-оператора — должны применяться в оптимальном сочетании. При этом, чтобы предельно упростить задачу управления, необходимо в наибольшей степени задействовать априорную информацию, включая максимальное использование наиболее простого программного управления. Для этого надо стремиться как можно четче детерминировать внешнюю среду. Например, при необходимости осуществлять распознавание ее объектов, прибегнуть к их маркировке и т. п. Необходимо по возможности снижать требования к качеству управления путем применения автоматической компенсации влияния возмущающих факторов (нестабильности внешней среды, параметров энергопитания и т. д.). Оптимальная последовательность движений по степеням подвижности. Движения по отдельным степеням подвижности принципиально могут выполняться одновременно, последовательно и в различных промежуточных комбинациях. В первом предельном случае, очевидно, обеспечивается наибольшее быстродействие перемещения рабочего органа манипулятора, а во втором могут быть максимально упрощены управление и система приводов (вплоть до применения одного привода для нескольких степеней подвижности). Оптимальная взаимосвязь движений по отдельным степеням подвижности. Движения, одновременно совершаемые по отдельным степеням подвижности, могут взаимно влиять друг на друга через общую кинематику и нагрузку. Эти взаимовлияния могут быть как вредными, так и полезными. Поэтому для каждого конкретного движения манипулятора существует оптимальный алгоритм связанного управления его приводами. Оптимальное разделение общей задачи управления роботом по нескольким уровням. Управление движением в общем случае, как и у человека, является Математическое описание роботов 91 многоуровневым. Поэтому необходимо оптимально разделять общую задачу управления роботом по этим уровням. Для разных задач число используемых уровней различно — от прямого управления с верхнего уровня отдельными приводами до ранее отработанных типовых алгоритмов и программ, комбинируемых с верхних уровней. 8. Взаимное согласование действий робота и совместно работающих других роботов и оборудования. Требования к движениям робота должны быть согласованы с требованиями к работающему совместно с ним другому оборудованию, а также и к объектам манипулирования. Эти требования могут быть часто существенно облегчены как за счет несущественных изменений конструкции и режима работы этого оборудования, так и конструкции объектов, которыми должен манипулировать робот. Сюда относится, например, устройство различных технологических направляющих, упоров и фасок для облегчения захвата и позиционирования перемещаемых предметов, сочленения их друг с другом при сборке и т. п. 5.2. Математическое описание манипуляторов Робот с позиций теории управления может быть представлен как совокупность объекта управления в виде исполнительных устройств и устройства управления (рис. 5.1, а). Исполнительные устройства в свою очередь состоят из механических систем и приводов (рис. 5.1, б). а) б) Рис. 5.1. Функциональная схема робота: УУо — общее устройство управления; УУn — устройство управления привода; Д — двигатель; М — механизм привода; МС — механические системы (манипуляционная и передвижения); СС — сенсорные системы 92 Глава 5 5.2.1. Математическое описание механической системы манипуляторов Рассмотрение математического описания роботов начнем с важнейшей их части — манипуляторов. На рис. 5.2 показана типовая кинематическая схема манипулятора с минимальным числом степеней подвижности. Рис. 5.2. Кинематическая схема трехзвенного шарнирного манипулятора: Р — рабочий орган; q1, q2, q3 — переносные степени подвижности; q4, q5, q6 — ориентирующие степени подвижности Механическая система манипулятора как объекта управления характеризуется: типом и числом переносных и ориентирующих рабочий орган степеней подвиж- ности; типом и размером рабочей зоны, в пределах которой перемещается рабочий ор- ган манипулятора. Входные переменные механической системы манипулятора — это усилия Qд1, Qд2, ..., Qдn двигателей Д, действующие по n степеням подвижности, а выходные — координаты рабочего органа xp и усилие Qp, с которым он воздействует на объекты внешней среды. Число степеней подвижности рабочего органа m равно шести: три координаты, определяющие положение его центра в пространстве, и три угла ориентации. Кроме координат рабочего органа, интерес могут представлять координаты x1, x2, ..., xn промежуточных звеньев, определяющие текущую конфигурацию всего манипулятора. Координаты x определяются в системе координат, неподвиж- Математическое описание роботов 93 ной относительно его основания (см. рис. 5.2), и называются абсолютными (опорными, инерциальными). Относительное положение соседних звеньев манипулятора определяется относительными координатами q1, q2, ..., qn, где n — число степеней подвижности манипулятора. Математическое описание механической системы манипулятора связывает выходные переменные xi , Qi со входными qi , Qдi. В свою очередь, абсолютные координаты x определяются положением звеньев манипулятора, т. е. относительными координатами q1, q2, ..., qn. В целом движение механической системы манипулятора описывается системой двух уравнений: x = f (q) ⎫ ⎬. q = Aм (Qд , Qв ) ⎭ (5.1) Первое уравнение — уравнение кинематики манипулятора, выражающее абсолютные координаты его звеньев вплоть до рабочего органа x(x1, x2, ..., xn), через их относительные координаты q(q1, q2, ..., qn), а второе — уравнение динамики для q(q1, q2, ..., qn), где Qд(Qд1, Qд2, ..., Qдn) — усилия двигателей, действующие по соответствующим координатам звеньев манипулятора q, а Qв(Qв1, Qв2, ..., Qвn) — различные возмущающие и противодействующие усилия. AM — оператор механической системы манипулятора. К этим уравнениям надо прибавить еще уравнения для усилий Qр, с которыми манипулятор взаимодействует с объектами внешней среды. Они будут рассмотрены далее. Рассмотрим первое уравнение (5.1): x = f(q). Оно представляет собой выражение для пересчета координат, которое выводится по правилам аналитической геометрии. Пусть требуется найти это выражение для абсолютных координат рабочего органа манипулятора xр(xр1, xр2, ..., xр6). Для этого надо для каждого звена ввести свою систему координат, в которой происходит перемещение последующего звена. Если вывести выражение для координат рабочего органа в системе координат предыдущего звена, а затем пересчитать их в систему координат предшествующего ему звена, то, действуя таким образом, можно дойти до основания манипулятора, с которым связана система абсолютных координат x. В результате получим искомое выражение абсолютных координат рабочего органа xр(xр1, xр2, ..., xр6) через последовательность относительных координат всех звеньев q(q1, q2, ..., qn). Рис. 5.3 иллюстрирует эту схему пересчета координат из системы ( O′, q1′, q2′ , q3′ ) в систему (O, q1 , q2 , q3 ), описываемую векторно-матричным уравнением: z = z′ + n (5.2) Существуют понятия прямой и обратной задач кинематики. Определение x по q: x = f(q), где q(q1, q2, ..., qn) — это прямая задача кинематики. Обратное определение: q = f −1 ( x p ) — это обратная задача кинематики. Она так же решается аналитически, однако ее решение может быть неоднозначным, т. к. n > 3. 94 Глава 5 Рис. 5.3. Схема пересчета координат Перейдем к рассмотрению второго уравнения системы (5.1) — уравнению динамики. Это уравнение q = Aм(Qд, Qв) связывает относительные координаты звеньев qi с действующими на систему движущими Qдi и противодействующими Qвi силами. В зависимости от решаемых задач это уравнение может быть выведено в различной известной в теоретической механике форме — в форме уравнений Ньютона, Гаусса, Деламбера, Лагранжа и их модификаций. Наиболее часто используется вывод уравнения динамики механической системы манипулятора в виде уравнения Лагранжа второго рода [7]. Для i-го звена манипулятора при этом в общем виде это уравнение записывается: d ⎛ ∂L ⎞ ∂L = Qi , i = 1, 2, 3, ..., n. ⎜ ⎟− dt ⎝ ∂qi ⎠ ∂qi (5.3) Здесь L = К – П — функция Лагранжа, где: К и П — соответственно кинетическая и потенциальная энергии звена; Qi = Qдi – Qвi — результирующая сила, приведенная к выходу привода звена. Уравнение (5.3) можно представить в следующей форме: n ∑ aij qij + j =1 n n ∑ ∑b k =1 j =1 ijk qk q j + ci = Qi , i = 1, 2, ..., n. (5.4) Первый член этого уравнения описывает силы, зависящие от ускорения (соответстj характеризуют инерцию звена); второй член — скоровенно коэффициенты при q Математическое описание роботов 95 стные силы (центробежные, кориолисовы, вязкого трения и т. п.), третий — гравитационные, статические. Систему уравнений звеньев (5.4) можно более кратко записать в матричновекторной форме: ) + c ( q ) = Q, A ( q ) q + b ( q,q (5.5) где: A(q) — симметричная матрица размерности n × n , описывающая инерционные свойства системы; b ( q , q ) — вектор скоростных сил размерности n; с(q) — вектор статических сил размерности n. Физический смысл членов уравнения (5.5) очевиден, и структура уравнения не зависит от метода, которым оно выведено. Аналогично уравнению кинематики, и в динамике существуют понятия прямой и обратной задач: первая — определение x по Q , вторая — наоборот. Рассмотрим в качестве примера уравнение динамики трехзвенного манипулятора с цилиндрической системой координат (см. рис. 3.2) [8]. Его кинетическая и потенциальная энергии соответственно равны: 2 ⎤ 1 1 ⎡ 2 ⎛ ⎞ 2 2 2 2 K = m ( r + r ϕ + z ) + mr ⎢ r + ⎜ r − ⎟ ϕ + z 2 ⎥ + 2 2 ⎢⎣ 2⎠ ⎝ ⎥⎦ + mr 1 2ϕ 2 1 + mz z 2 + ( J ϕ + J ϕ′ ) ϕ 2 24 2 2 (5.6) П = ( m + mr + mz ) zg , .... где: m — масса рабочего органа с полезным грузом; mz — масса вертикальной колонны, движущейся по координате z; mr — масса горизонтальной стрелы, движущейся по координате r; — длина стрелы; Jϕ — момент инерции массы колонны mz, приведенный к оси ϕ; J ϕ′ — момент инерции частей колонны, участвующих только в угловом движении, приведенный к оси ϕ; g — ускорение силы тяжести. Выражение для кинетической энергии соответствует компоновке манипулятора, при которой в среднем положении стрелы она выступает на одинаковую величину / 2 в обе стороны от вертикальной оси колонны. Обозначив q1 = ϕ, q2 = z, q3 = r и подставив приведенные выражения для К и П в (5. 2), получим уравнение: ⎡ aϕ ( r ) 0 ⎢ az ⎢ 0 ⎢⎣ 0 0 0⎤ ⎡bϕ ( ϕ ,r,r ) ⎤ ⎡ 0 ⎤ ⎡ M ϕ ⎤ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 ⎥ q + ⎢ 0 ⎥ + ⎢ cz ⎥ = ⎢ Fz ⎥ . ⎢⎣ br ( ϕ , r ) ⎥⎦ ⎢⎣ 0 ⎥⎦ ⎢⎣ Fr ⎥⎦ ar ⎥⎦ (5.7) 96 Глава 5 Здесь: aϕ ( r ) = J ϕ + J ϕ′ + ( mr + m ) r 2 − mr r + mr .... az = mz + mr + m, 2 , 3 ar = mr + m, ⎡ bϕ ( ϕ , r, r ) = 2 ⎢( mr + m ) r + mr ⎣ .... ⎤ rϕ , 2 ⎥⎦ ⎡ ⎤ br ( ϕ 2 , r ) = 2 ⎢ mr − ( mr + m) r ⎥ ϕ 2 , cz = ( mz + mr + m) g , 2 ⎣ ⎦ M ϕ — момент, действующий по координате ϕ; Fz, Fr — усилия, действующие соответственно по координатам z и r (в скобках указаны координаты, которые входят в выражения для данного коэффициента). Вектор bϕ описывает кориолисову силу, вектор br — центробежную, а вектор с — силу тяжести. Соответственно, для уравнения (5.5): ⎡ aϕ ( r ) 0 ⎢ A=⎢ 0 az ⎢⎣ 0 0 ⎡bϕ (ϕ , r, r ) ⎤ ⎡M ϕ ⎤ 0⎤ 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎥ ⎢ ⎥ 0⎥, b=⎢ 0 ⎥ , c = ⎢ (mz + mr + m) ⎥ , Q = ⎢ Fz ⎥ . ⎢ br (ϕ , r ) ⎥ ⎢ Fr ⎥ ⎢⎣ ⎥⎦ ar ⎥⎦ 0 ⎣ ⎦ ⎣ ⎦ Уравнение (5.7) можно представить системой следующих трех уравнений: + bϕ ( ϕ , r, r ) = M ϕ ⎫ aϕ ( r ) ϕ ⎪ az z + cz = Fz ⎬. ⎪ ar r + br ( ϕ , r ) = Fr ⎭ (5.8) На рис. 5.4 приведена соответствующая структурная схема, где показаны, в частности, взаимовлияния движений по отдельным степеням подвижности. Эти нелинейные уравнения можно линеаризовать разложением нелинейных членов в ряд Тейлора с отбрасыванием членов ряда выше первой степени малости. Получим справедливую для малых перемещений систему уравнений: (a 0 ) Δ r = ΔM ϕ ⎫ p + bϕ′ ) pΔϕ + ( bϕ′′ p + bϕ′′′ + aϕ′ ϕ ⎪ ⎪ az p 2 Δ z = Δ Fz ⎬. ⎪ 2 ( ar p + br′ ) Δ r + br′′pΔϕ = Δ Fz ⎪ ⎭ ϕ (5.9) 0 ; bϕ′ , bϕ′′, bϕ′′′; br′ , br′′ — коэффиЗдесь: р — символ дифференцирования по времени; aϕ′ ϕ циенты разложения в ряд Тейлора функций aϕ, bϕ и br при q = q0 и Q = Q0. Индексом «0» отмечены значения переменных, соответствующих статическому режиму, относительно которого берутся их отклонения. Математическое описание роботов 97 . ϕ 1 Mϕ 1 aϕ p – p ϕ bϕ –Сz . z 1 Fz 1 az p p z br – . r 1 Fr 1 ar p p r Рис. 5.4. Структурная схема механической системы трехзвенного манипулятора с цилиндрической системой координат Из уравнения динамики (5.5) для относительных координат q можно получить уравнение для абсолютных координат, используя связывающее эти переменные уравнение кинематики x = f(q). Для этого надо дважды продифференцировать по, входящему в уравнение (5.5), и подследнее выражение, чтобы перейти в нем к q ставить его туда. Получим сперва: x = ∂f ( q ) q = J ( q ) q , ∂q (5.10) ∂f j ∂f ( q ) — (m×n матрица Якоби с элементами ; j = 1, 2, ..., m; ∂qi ∂q i = 1, 2, ..., n), а затем: где J ( q ) = x = J ( q ) q + J ( q ) q = J ( q ) q + D ( q , q ) , где: D ( q , q ) = J ( q ) q — вектор-столбец с элементами: q T n n ∂ 2 fk ( q ) ∂ 2 fk q qi q j , = ∑∑ ∂ q∂ q T i j ∂ qi ∂ q j .. где: k = 1, 2, ..., m. .. .. .. (5.11) 98 Глава 5 и подставив в уравнение (5.5) или, наоборот, Получив отсюда выражение для q из уравнения (5.5), получим искомое уравнение подставив сюда выражение для q динамики для x: A ( q ) J −1 ( q ) x − A(q ) J ( q ) x + b ( q , q ) + c ( q ) = J −T ( q ) Q. (5.12) Основной интерес представляет это уравнение для координат рабочего органа манипулятора xp. Заметим, что при решении уравнения (5.12) в случае, когда число степеней подвижности манипулятора n больше числа степеней подвижности его рабочего органа m, т. е. имеет место избыточность степеней подвижности, возникает неоднозначность зависимости q = f −1 ( x ) и, соответственно, J −1 ( q ) . Для ее преодоления обычно вводят какие-нибудь полезные дополнительные условия по числу избыточных степеней подвижности. Выведем теперь уравнения для усилий, с которыми манипулятор взаимодействует с объектами внешней среды. Здесь возможны два варианта. Первый вариант, когда внешняя среда воздействует на манипулятор, оказывая его звеньям определенное сопротивление. В этом случае используется исходное уравнение динамики манипулятора для относительных переменных (5.5) с подстановкой в него указанных сил, пересчитанных на их координаты. Получается уравнение: A ( q ) q + b ( q , q ) + c ( q ) = Q′ − J T ( q ) Qвнеш . (5.13) Здесь Q′ = QД − QВ1 , где: QВ1 — внутренние возмущающие (противодействующие) силы; Qвнеш — внешние силы, действующие со стороны внешней среды; JT(q) — транспонированная n × m матрица Якоби, с помощью которой осуществляется пересчет Qвнеш в систему относительных координат для определенного звена манипулятора. (Выражение JT(q) Qвнеш получается из баланса мощностей Qвнеш x = QВ 2 q , где QВ2 — действующие на звенья в системе относительных координат силы, вызванные силой Qвнеш .) Второй вариант силового взаимодействия с внешней средой — это силовое воздействие на внешнюю среду рабочим органом самого манипулятора. В этом случае следует пользоваться уравнением динамики для абсолютных координат, по которым осуществляется взаимодействие с внешней средой. Оно получается из уравнения (5.12): A ( q ) J −1 ( q ) x p − A ( q ) J −1 ( q ) J ( q ) x p + b ( q , q ) + c ( q ) = Qp + Q′′, (5.14) где Qp — выделенные из вектора Q и пересчитанные в систему абсолютных координат искомые силы, создаваемые приводами на рабочем органе и действующие по l ≤ m координатам, по которым осуществляется указанное силовое воздействие на среду. Для остальных ( m − l ) координат уравнение динамики остается прежним: (5.5) или (5.12). Q′′ — остальная часть Q′, тоже пересчитанная в систему абсолютных координат. Математическое описание роботов 99 В целом, cогласно рассмотренным уравнениям механической системы манипулятора, он, как объект управления, представляет собой весьма сложный динамический объект. Его выходными переменными являются шесть координат рабочего органа и силы взаимодействия с внешней средой, действующие по некоторым из этих координат. Из них управляемыми переменными общим числом соответственно до шести могут быть как координаты рабочего органа, так и действующие по их направлениям усилия. Например, при выполнении технологической операции нанесения покрытий с помощью пульверизатора требуется управление всеми шестью координатами, а операция снятия шероховатостей и заусениц с поверхностей требует, наряду с управлением координатами для осуществления сканирования рабочим инструментом по этой поверхности, управления силой, направленной по нормали к ней. Сегодня в системах управления манипуляторов управление осуществляется, как правило, не по измеряемым координатам рабочего органа xp, а по относительным координатам q. Объясняется это исторически сложностью измерения абсолютных координат рабочего органа, поэтому точность позиционирования рабочего органа манипулятора определяется точностью датчиков координат q и точностью пересчета от q к xp. В результате требования к точности датчиков qi оказываются в несколько раз выше требуемой точности управления xp. Управление усилием на рабочем органе манипулятора осуществляется обычно с помощью многокомпонентных датчиков усилия, расположенных в запястье рабочего органа или вычислителей этих усилий (наблюдателей) по измеряемым другим переменным, входящим в уравнение динамики манипулятора (см. разд. 8.5). 5.2.2. Взаимное влияние степеней подвижности манипуляторов Итак, как показано, динамика механической системы манипуляторов может быть описана в относительных координатах векторно-матричным уравнением: A ( q ) q + b ( q , q ) + c ( q ) = Q. Здесь A ( q ) q — векторная функция сил инерции, пропорциональных ускорению, где: A(q) — симметричная n × n матрица, описывающая инерционные свойства системы; n — число ее степеней подвижности; b ( q , q ) — n-мерный вектор скоростных сил: центробежных, кориолисовых, трения и зависящих от скорости в сочленениях; с(q) — n-мерный вектор сил тяжести; Q — вектор сил, действующих по n степеням подвижности системы. Наличие q в скобках означает, что члены этого уравнения зависят от конфигурации манипулятора, т. е. что его механическая система является нестационарной. Важным ее свойством является также взаимосвязанность степеней подвижности, т. е. влияние их друг на друга. Рассмотрим эти взаимовлияния. Их существует четыре типа: влияние на величину инерции, влияния по ускорению q, по скорости q и по положению q. 100 Глава 5 Первые два типа взаимовлияния учитываются матрицей: ⎡ a11 a12 ⎢a a22 A ( q ) = ⎢ 21 ⎢ ⎢ ⎣ an1 an 2 a1n ⎤ a2 n ⎥⎥ . ⎥ ⎥ ann ⎦ Влияние на инерцию по i-й степени подвижности других степеней учитывается в диагональных элементах aii матрицы. Так, в приведенном ранее примере цилиндрической трехстепенной системы такое влияние описывается элементом aϕ(r) в уравнении (5.7). Здесь имеет место зависимость момента инерции по координате ϕ от координаты r — с выдвижением горизонтальной стрелы манипулятора растет инерция вращения его колонны относительно вертикальной оси. В манипуляторах со сферической системой координат (см. рис. 3.3) величина выдвижения стрелы r влияет на моменты инерции относительно осей ϕ и θ. Аналогичное влияние положения звеньев на момент инерции относительно предыдущих осей существует и в манипуляторах с угловой системой координат (см. рис. 3.4). Второй тип взаимовлияния — по ускорению q — описывается недиагональными элементами aij матрицы A(q). Оно заключается в действии по отдельным степеням подвижности сил инерции, пропорциональных ускорениям по другим степеням подвижности. Такое влияние имеет место, например, в шарнирных манипуляторах от предыдущего шарнира на последующие, действующие в одной с ним плоскости. Третий тип влияния — по скорости q — описывается вектором b ( q , q ) . В упомянутом ранее примере манипулятора с цилиндрической системой координат — это центробежная сила, действующая по координате r в функции скорости ϕ (см. выражение для br ( ϕ , r ) в уравнении (5.7)), и кориолисова сила, действующая по ϕ в функции от произведения ϕ r (см. там же выражение для b j ( ϕ , r, r ) ). Четвертый тип влияния — по силе тяжести — учитывается вектором с (q). Это влияние силы тяжести звеньев, движущихся не в горизонтальной плоскости. Такое влияние, например, существует в шарнирных манипуляторах, работающих в вертикальной плоскости. Таким образом, как объект управления, манипуляторы представляют собой не только нестационарные, но и взаимосвязанные системы. Конечно, эта взаимосвязанность усложняет задачу управления такими объектами. Однако она не обязательно оказывает отрицательное влияние на качество управления. Так, в рассмотренном ранее примере манипулятора с цилиндрической системой координат при выдвижении его стрелы, т. е. увеличении r, вращение колонны способствует этому движению стрелы за счет центробежной силы по ϕ . Поэтому, хотя с точки зрения облегчения задачи управления желательно каким-то образом развязывать степени подвижности манипулятора, чтобы иметь возможность управлять ими независимо, такой подход в общем случае не является наилучшим в отношении качества управ- Математическое описание роботов 101 ления. Теоретически оптимальное решение дает представление манипулятора в качестве объекта управления как единой многомерной взаимосвязанной системы. Рассмотрим способы борьбы с взаимовлиянием степеней подвижности, которые следует применять, чтобы в случае необходимости освободиться от этих взаимовлияний. Существуют две группы таких способов: конструктивные, основанные на уравновешивании масс звеньев манипулятора; алгоритмические, реализуемые системой управления. Простейший вариант первого способа — это уравновешивание масс звеньев противовесами, в том числе автоматически перемещающимися для уравновешивания переменных масс, — например, полезного груза. Для манипуляторов, все звенья которых перемещаются в одной плоскости, такое уравновешивание может обеспечить полное устранение взаимовлияний степеней подвижности (рис. 5.5). Условие уравновешивания заключается в равенстве моментов сил веса противовесов и веса уравновешиваемых ими звеньев относительно их оси вращения. Очевидный недостаток такого способа — увеличение инерции звеньев манипулятора и его общей массы. (В связи с этим для уменьшения момента инерции целесообразно уменьшать расстояние противовеса до оси вращения за счет пропорционального увеличения его массы, т. к. момент инерции пропорционален квадрату этого расстояния, в то время как для снижения массы манипулятора следует поступать противоположным образом.) Рис. 5.5. Шарнирный манипулятор с противовесами П1, П2, П3 Лучшим решением рассматриваемой задачи является использование в качестве противовеса конструктивно необходимых частей манипулятора путем размещения их по разные стороны от оси вращения. К таким частям могут относиться, например, элементы приводов и рабочих органов манипулятора. Кроме противовесов, для уравновешивания звеньев применяются пружины и дополнительные приводы, создающие необходимое уравновешивающее усилие. Пружинные уравновешивающие механизмы, помимо устранения взаимовлияния степеней, позволяют скомпенсировать и гравитационные силы, в том числе полезного груза, и соответственно снизить требуемую мощность двигателей или повысить грузоподъемность манипулятора. 102 Глава 5 Вторая группа способов устранения взаимовлияния степеней подвижности, основанная на использовании системы управления, заключается в компенсации этих влияний с помощью перекрестных управляющих воздействий на приводы по тем измеряемым переменным qi , по которым существует взаимовлияние, но с обратным знаком. Например, таким образом могут быть скомпенсированы взаимные влияния степеней подвижности манипулятора с цилиндрической системой координат (см. рис. 5.4). Для этого через приводы Mϕ и Fr надо ввести перекрестные воздействия, компенсирующие взаимовлияния между ϕ и r, описываемые звеньями bϕ по r и br по ϕ , r. Самым общим средством уменьшения рассматриваемых взаимовлияний является повышение быстродействия управления степенями подвижности манипулятора, поскольку это соответственно повышает эффективность парирования любых возмущений, действующих на эти степени подвижности, включая, разумеется, и их взаимовлияния. 5.2.3. Учет упругости звеньев манипулятора Уравнение динамики (5.14) механической системы манипулятора выведено в предположении абсолютной жесткости ее звеньев, т. е. отсутствии их упругих деформаций. Рассмотрим теперь, как при математическом описании учитывать эти деформации, и выведем соответствующее уравнение динамики. В звеньях манипуляторов возможны два типа упругости: сосредоточенная и распределенная. Сосредоточенная упругость может иметь место в сочленениях звеньев, в передачах (зубчатых, цепных, тросовых и т. п.). Распределенная упругость вызывается гибкостью звеньев, их изгибом или скручиванием. Упругие деформации, как правило, нежелательны, т. к. они порождают колебания, снижающие быстродействие и создающие дополнительные динамические нагрузки на приводы. Основная причина появления упругих деформаций — это стремление снизить массу механической системы манипулятора. Минимум ее массы имеет место при расчете манипулятора не на жесткость, а на прочность — со снятием соответственно ограничений на упругие деформации в механической системе. Поскольку это неизбежно ведет к усложнению системы управления, оптимальное решение должно находиться при синтезе обеих систем совместно. Однако упругость может играть и положительную роль. Так, часто в запястье рабочего органа вводят упругость для создания податливости, полезной при выполнении сборочных и других операций с объектами внешней среды. Наконец, существуют манипуляторы типа хобота, в которых управляемая гибкость лежит в основе их принципа действия (см. рис. 3.11). На рис. 5.6 показана расчетная двухмассовая модель звена с сосредоточенной упругостью. Здесь М1, М2 — соответственно движущий момент на входе и момент нагрузки на выходе звена; J1, J2 — моменты инерции; q1, q2 — относительные коор- Математическое описание роботов 103 Рис. 5.6. Двухмассовая модель звена с сосредоточенной упругостью динаты (здесь — углы поворота) на входе и выходе звена, так что разность (q1 – q2) — есть угол скручивания гибкого элемента, представленного в виде пружины. Математическое описание этого звена: J1 p 2 q1 = M 1 − k ′ p ( q1 − q2 ) − k ( q1 − q2 ) ⎫⎪ ⎬. J 2 p 2 q2 = k ′ p ( q1 − q2 ) + k ( q1 − q2 ) − M 2 ⎪ ⎭ (5.15) Здесь: k , k ′ — коэффициенты жесткости и вязкого трения гибкого элемента; р — символ дифференцирования по времени. Исключив q1, получим уравнение для q2: p 2 (T12 p 2 + T2 p + 1) q1 = ( k1′ p + k1 ) M 1 − ( k2′′ p 2 + k2′ p + k2 ) M 2 . .... .... .... (5.16) Здесь: T1 = 1 2ξ , T2 = 0 ; ω0 ω0 k1′ = ω2 2 ω12 2ξ 2ω2 1 2ξ1ω1 ′′ ′ k = , k = ; k = k = , , , 2 2 2 1 ω0 2 J 2 ω0 2 J 1 ω0 2 J 2 ω0 2 J 2 ω 0 2 J1 12 ⎛k k ⎞ ω0 = ⎜ + ⎟ ⎝ J1 J 2 ⎠ — собственная частота звена; 12 12 ⎛k ⎞ ⎛ k ⎞ ω1 = ⎜ ⎟ , ω2 = ⎜ ⎟ ⎝ J1 ⎠ ⎝ J2 ⎠ k′ 12 ( k J1 ) , 2 лебаний. ξ1 = — парциальные частоты; 12 .... ξ2 = k′ k′ ⎛ k J J ⎞ 12 ( k J 2 ) , ξ0 = ⎜ 1 2 ⎟ 2 2 ⎝ J1 + J 2 ⎠ — показатели затухания ко- При отсутствии вязкого трения k 2′ = 0, поэтому ξ 0 = 0 и T0 = 0, и звено становится колебательным с нулевым затуханием. Типичное звено с распределенной упругостью — это гибкий стержень, показанный на рис. 5.7. Стержень с массой m на конце изгибается при его повороте под дейст- 104 Глава 5 Рис. 5.7. Модель звена с распределенной упругостью вием момента М1 при наличии какого-либо противодействующего момента М2. Такое звено с распределенными параметрами описывается дифференциальным уравнением в частных производных. Этому соответствует бесконечное число степеней свободы и целый спектр частот колебаний. Однако, если нас интересует только положение конечной точки стержня с массой m, такую модель можно свести к ранее рассмотренной дискретной двухмассовой модели. Это соответствует учету только одной основной гармоники колебаний из всего спектра [8]. Уравнение динамики всей механической системы манипулятора, содержащей рассмотренные ранее упругие звенья, можно представить в таком виде: ⎡ A11 ( q,q y ) ⎢ ⎢⎣ A21 (q,q y ) y ,q y ) ⎤ ⎡ A12 (q,q y ) ⎤ ⎡ q ⎤ ⎡ b1 (q,q;q 0 ⎤ ⎥⋅⎢ ⎥ + ⎢ ⎥+⎢ ⎥+ y ,q y ) ⎥ ⎣ k ′q y + kq y ⎦ A22 ( q,q y ) ⎥⎦ ⎣ qy ⎦ ⎣⎢b2 (q,q;q ⎦ ⎡ c1 (q,q y ) ⎤ ⎡Qд ⎤ +⎢ ⎥ = ⎢ ⎥. ⎣⎢ c2 (q,q y ) ⎦⎥ ⎣ 0 ⎦ (5.17) По сравнению с уравнением (5.5) манипулятора без упругих деформаций здесь появились новые «упругие» координаты qy и соответствующее уравнение для них. В нем k , k ′ — матрицы коэффициентов жесткости и вязкого трения гибких звеньев. Уравнение (5.17) выводится так же, как ранее уравнение (5.5) для жесткой механической системы манипулятора, например, с помощью уравнения Лагранжа второго рода (5.3), если в выражениях для кинетической и потенциальной энергий звеньев учесть гибкие звенья. Для более точного описания звена с распределенной упругостью, учитывающего высшие гармоники колебаний, оно разбивается на несколько частей, каждая из которых описывается рассмотренным ранее образом (метод конечных элементов). При решении задач управления манипулятором с гибкими звеньями необходимо принимать специальные меры для гашения колебаний, вызываемых упругими деформациями в этих звеньях. Основным способом являются обратные связи по величине упругих деформаций и их первой производной. Главная проблема здесь состоит в их определении путем измерения таких деформаций специальными дат- Математическое описание роботов 105 чиками или путем их расчета с помощью функционально связанных с ними измеряемых переменных (передаваемое через гибкое звено усилие, вызванное последним ускорением и т. п.). Применяются также стабилизирующие обратные связи непосредственно по этим переменным, без вычисления деформаций. 5.2.4. Математическое описание приводов Приводы, применяемые в манипуляторах, были рассмотрены в главе 4. Это электрические, гидравлические и пневматические позиционные приводы. Кроме того, возможно применение в манипуляторах шаговых приводов и приводов с управляемыми муфтами и нерегулируемыми двигателями. Математическое описание системы приводов манипулятора — это зависимость: (5.18) Qд = Aп (U п ), где: Qд — вектор движущих сил на выходе приводов манипулятора размерности n, приводящих в движение его степени подвижности; Ап — оператор системы приводов; Uп — n-мерный вектор управляющих воздействий на входе этой системы. Математическое описание двигателя отдельного привода с угловым перемещением (вращающегося) имеет вид: J д pωд = M д − M н ⎫⎪ ⎬. (Tд p + 1) M д = f (U п , ωд )⎪⎭ (5.19) Здесь: Jд — момент инерции; Мн — момент нагрузки на валу двигателя; Мд — движущий момент, развиваемый двигателем; ωд — угловая скорость; Тд — постоянная времени цепи, связывающей Мд с управляющим воздействием Uп; f(Uп, ωд) — статическая характеристика двигателя. Последняя зависимость в линейном приближении имеет вид: f (U п ,ωд ) = kUU п − kωω д . (5.20) С использованием этого выражения система (5.19) приводится к уравнению: ( Т ′Т д где: Т д′ = д p 2 + Т д′ p + 1) ωд = k U п − Jд k , k= U. kω kω Tд + 1 Mн, kω (5.21) Для электрического двигателя Тд — это электромагнитная постоянная времени, которой обычно можно пренебречь по сравнению с постоянной времени Т д′ , определяемой Jд. При Тд = 0 уравнение (5.21) принимает вид: (Tд′ p + 1) ωд = kU п − k1 ω Mн. (5.22) 106 Глава 5 Математическое описание привода включает, помимо двигателя, описание механической передачи на выходе (например, редуктора) и устройства управления. Для типовой схемы привода алгоритм, реализуемый его устройством управления, — это пропорционально-дифференцирующее (ПД), реже пропорционально-интегральнодифференцирующее (ПИД) управление. При исследовании динамики манипуляторов «в большом» необходимо учитывать нелинейность статической характеристики двигателя — нечувствительность и насыщение, которые ограничивают быстродействие привода. 5.2.5. Математическое описание манипулятора с приводами В общем виде математическое описание манипулятора включает рассмотренные зависимости: x = f (q), ⎫ ⎪ ⎪ q = A м( Qд , Qв ) , ⎬ . ⎪ Qд = A п(U п ) . ⎪ ⎭ (5.23) Здесь: Ам и Ап — операторы механической системы и системы приводов манипулятора, а Uп — вектор управляющих воздействий на входе системы приводов. Воспользовавшись уравнением динамики манипулятора (5.5) и линеаризованным уравнением привода по схеме на рис. 4.1, получим схему, показанную на рис. 5.8, и соответствующую систему уравнений: A ( q ) p 2 q + b ( pq, q ) + c ( q ) = Qд − QВ , ⎫ ⎪ ⎪ Qд = Wn 2 ( p ) U п − J д p 2 q, ⎬. ⎪ U п = Wn1 ( p ) ( q3 − q ) − Wп3 ( p ) pq. ⎪ ⎭ (5.24) Здесь при линейном рассмотрении: Wп2(p) — передаточная матрица системы приводов, связывающая векторы Qд и Uп; Wп1(p), Wп3(p) — передаточные матрицы корректирующих звеньев; Jд — диагональная матрица моментов инерции двигателей, приведенных к выходу приводов q (умножением на квадрат передаточного отношения редуктора). Исключив в (5.24) промежуточные переменные, можно получить следующее общее уравнение: ⎡⎣ J д + A ( q ) ⎦⎤ p 2 q + b ( pq, q ) + c ( q ) = = Wn1 ( p ) Wn 2 ( p )( q − q3 ) − Wn 2 ( p )Wn 3 ( p ) pq − Qв . (5.25) .... В схему на рис. 5.8 могут быть введены и различные нелинейности типа насыщения, нечувствительности, сухого трения и т. п. Математическое описание роботов 107 UП q3 Wn1(p) Wn2(p) – – QД – QВ p2q –1 (JД + A(p)) p – Wn3(p) + + 1 pq 1 q p b(pq,q) c(q) Рис. 5.8. Структурная схема манипулятора с приводами При исследовании конкретных режимов работы в рассмотренном математическом описании могут быть сделаны и следующие упрощения. 1. При невысоких скоростях движения (примерно менее 0,5 м/с), когда динамическое взаимовлияние приводов мало, можно пренебречь этим взаимовлиянием по ускорению и скорости, т. е. недиагональными элементами матрицы A(q) и смешанными произведениями скоростей в выражении b(pq, q). В этом случае левая часть уравнения (5.25) принимает вид: ⎡⎣ J д + J э ( q ) ⎦⎤ p 2 q + b ( pq, q ) + c ( q ) . Здесь: n b ( pq, q ) = ∑ bii ( q ) ( pqi ) , т. е. не содержит членов bij ( q ) qi q j ; 2 i =1 J э ( q ) = diag ( J1э , J 2э ,..., J nэ ) — диагональная матрица эффективных моментов инерции относительно qi i-го и всех последующих (i+1), ..., n, звеньев, которая находится по формуле: J iэ = дQдi , дqi (5.26) т. е., исходя из уравнения динамики механической системы манипулятора при замене A(q) на Jэ(q). Соответственно, это выражение можно представить так: −1 ⎛ дq ⎞ J iэ (q ) = ⎜⎜ i ⎟⎟ = ⎡⎣ A−1 ( q ) ⎤⎦ ⎝ дQдi ⎠ −1 ii . (5.27) 2. Обычно, особенно при невысоких скоростях движения, переходные процессы в приводах протекают существенно быстрее, чем перемещения самого манипу- 108 Глава 5 лятора. Поэтому уравнение манипулятора (5.25) можно разделить на два решаемых независимо: одно уравнение в виде уравнения (5.25) при р = 0 в его правой части и второе в виде второго и третьего уравнений системы (5.24). 3. Можно, используя метод «замороженных» коэффициентов, разбить рабочую зону манипулятора на участки, в которых в членах b(pq,q) и с(q) уравнения динамики манипулятора ставить постоянные значения q. 5.3. Математическое описание систем передвижения роботов Математическое описание систем передвижения роботов, как и их манипуляционных систем, состоит из описания механической системы и системы приводов. Если дальность передвижения робота сравнима с размером рабочей зоны его манипулятора, математическое описание системы передвижения можно вообще включить в описание манипулятора, добавив в него степени подвижности системы передвижения. В общем случае, когда, как чаще всего и бывает, манипуляционная система и система передвижения действуют в разное время, в таком объединении нет смысла, т. к. обе системы все равно рассматриваются раздельно. Общая особенность приводов систем передвижения роботов в том, что их основной режим — это управление по скорости с переходом на позиционное управление при остановках. 5.4. Математическое описание человека-оператора Наряду с автоматическим управлением в системах робототехники широко применяется и управление со стороны человека-оператора. В этих случаях человек входит в контур управления, который замыкается через его органы чувств, и, соответственно, должен быть представлен в структурной схеме всей робототехнической системы и ее математическом описании. Такая система относится к человекомашинным системам и ее описание состоит из двух частей: x = Aт ( G ) ⎫⎪ ⎬. G = Ач ( Gч ) ⎪ ⎭ (5.28) Здесь G — задающее воздействие на техническую систему от человека-оператора, а Gч — задание, которому следует он сам. Первое уравнение описывает техническую часть системы, а второе — человека-оператора. Ат и Ач — их операторы. В первом приближении человек-оператор математически может быть представлен звеном чистого запаздывания с величиной времени запаздывания в среднем в сотни миллисекунд. Задержка реакции человека непостоянна и определяется двумя составляющими: Математическое описание роботов 109 латентного (скрытого) периода реакции, т. е. чистого запаздывания реакции оператора от появления воздействия на его органы чувств до начала исполнительной реакции; моторным компонентом, т. е. длительностью этой реакции. Величина латентного периода непостоянна, различна для разных органов чувств и находится в следующих пределах: осязание (тактильное воздействие): 90–220 мс; слух (звук): 120–180 мс; зрение (свет): 150–200 мс; обоняние (запах): 310–390 мс; температурное воздействие: 280–1600 мс; болевое ощущение: 130–890 мс. Эта величина зависит от интенсивности входного воздействия и уменьшается с его ростом. Однако очень сильное воздействие, наоборот, может вызвать так называемое охранное торможение. Моторная составляющая описывается выражением: tр = tр мин + aI − n , (5.29) где: tр мин — минимальное время реакции (в оптимальных условиях); а — коэффициент переменной составляющей tр ; I — интенсивность внешнего воздействия; n — показатель степени, зависящий от характеристики внешнего воздействия и условий, при которых оно происходит. Параметры оператора существенно зависят от его состояния и обучения. Состояние (работоспособность) оператора изменяется в процессе его работы, проходя следующие три основные фазы: обучение, установившийся режим, утомление. Наконец, оператор может просто ошибаться («человеческий фактор»), что в данном случае означает отказ (сбой) системы управления. Надежность оператора характеризуется статистически средней интенсивностью ошибок. Эта величина, помимо состояния оператора, зависит еще от количества операций, выполняемых оператором: с ростом их числа интенсивность ошибок, оставаясь вначале неизменной, начинает затем расти вплоть до перехода оператора в состояние полной неработоспособности. Человек не способен воспринимать больше трех сообщений одновременно и более 30 бит/с информации (реально 1–5 бит/с). Инженерами-психологами разработаны рекомендации по проектированию пультов оператора, включая размещение устройств отображения информации и органов управления, а также по оптимальному распределению функций между человекомоператором и техникой. Вследствие сложности учета всех особенностей человека-оператора, как звена человеко-машинных систем, при их проектировании помимо математического мо- 110 Глава 5 делирования особенно большое значение имеет физическое моделирование, т. е. экспериментальное исследование системы управления с человеком в ее контуре. Параметры собственно человека-оператора и их оценка при отборе операторов также определяются экспериментально. 5.5. Компьютерное моделирование робототехнических систем Вследствие сложности робототехнических систем основным средством их исследования, помимо, разумеется, физического моделирования и натурных исследований, является компьютерное моделирование при решении задач как анализа, так и синтеза. Предварительные этапы такого исследования заключаются в решении двух задач: доказательстве достоверности используемого математического описания, т. е. решение задачи идентификации [8]; разработке компьютерной модели и доказательстве ее адекватности исходному математическому описанию [9]. Задача идентификации включает этапы структурной и параметрической идентификации. В рамках этапа структурной идентификации необходимо определить существенные свойства объекта исследования, отбросив те, которыми, исходя из конкретных целей предстоящего исследования, можно пренебречь. В результате определяется структура объекта. Прежде всего, здесь надо рассмотреть и учесть нелинейности, ограничения, упругости и взаимовлияния степеней подвижности манипуляторов. На этапе параметрической идентификации должны быть установлены с оценкой точности численные значения всех параметров определенной на предыдущем этапе структурной схемы системы, диапазоны их изменения и другие количественные зависимости и характеристики. Задача разработки компьютерной модели заключается в создании программы численного решения системы уравнений, описывающей объект исследования, на основе одного из известных методов численного интегрирования. На рис. 5.9 приведена обобщенная схема соответствующего пакета программ для рассмотренного ранее математического описания манипуляторов. Пакет имеет модульную структуру и включает головную управляющую программу и набор подпрограмм. Управляющая программа обеспечивает ввод исходных данных, их предварительную обработку и формирование заданий. В блоке «Сборка уравнений кинематики» формируются матрицы пересчета координат и программы пересчета абсолютных и относительных координат. В блоке «Уравнения кинематики» осуществляется расчет программных траекторий qз(t) по xp(t), т. е. решение обратной задачи кинематики. В блоке «Сборка уравнений динамики» вычисляются коэффициенты уравнения динамики для механической системы манипуляторов. В блоке «Уравнения динамики» формируется правая часть этого уравнения, включая приводы и устройство управления робота для случая замкнутой системы управления. Математическое описание роботов 111 Управляющая программа Алгоритмы управления Сборка уравнений кинематики Сборка уравнений динамики Уравнения кинематики Уравнения динамики Решение уравнений кинематики (построение программных траекторий) Решение уравнений динамики (построение движений) Формирование уравнений Решение Рис. 5.9. Схема пакета программы моделирования манипуляционных систем Процесс моделирования, например, программного движения манипулятора протекает так: по дискретным значениям заданной траектории движения рабочего органа и развиваемых им усилий вычисляются соответствующие заданные значения относительных перемещений приводов и их усилий. Затем для этих значений вычисляются значения отработанных переменных и соответствующие погрешности их отработки, а также, при необходимости, показатели качества переходных процессов. Далее могут определяться другие характеристики исследуемой системы: чувствительность к изменениям отдельных параметров, зависимость качества управления от конфигурации манипулятора и веса полезного груза и т. п. Описанная последовательность соответствует решению задачи анализа. Задача синтеза — структурного и параметрического — требует, прежде всего, выбора критериев качества. Затем решается оптимизационная задача выбора варьируемой части структурной схемы и ее параметров. Эта задача, вследствие сложности объекта исследования, решается обычно путем последовательных приближений, начиная с предельно упрощенной модели с последовательным ее усложнением и соответствующим уточнением решения. Последние этапы этого процесса часто выполняются по процедуре анализа, т. е. исследования влияния вновь вводимых элементов схемы и соответствующей коррекции ранее найденного решения задачи синтеза, в том числе и путем введения дополнительных корректирующих звеньев (изменения структуры системы) [9]. 112 Глава 5 ГЛАВА 6 ДИСКРЕТНОЕ ЦИКЛОВОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ РОБОТАМИ 6.1. Особенности цикловых систем управления роботов Рассмотрев математическое описание робота как системы управления (см. главу 5), приступим к изучению способов и систем его управления. При этом пойдем от простого к все более сложному, а именно: начнем с систем программного автоматического управления, затем рассмотрим системы адаптивного и интеллектуального управления, требующие очувствления роботов, т. е. оснащения их сенсорными системами. После этого перейдем к системам управления с участием человекаоператора. В заключение будут рассмотрены системы группового управления как роботами, так и роботами совместно с другими объектами в составе технологических комплексов. Рассмотрение систем программного управления мы так же начнем с простых дискретных систем. Они бывают одношаговые — цикловые, и многошаговые. Начнем с первых. Самый распространенный тип роботов с цикловым программным управлением — это пневматические промышленные роботы. Примером может служить показанный на рис. 4.3 робот МП-9С. Устройство управления робота (УУо на рис. 5.1, б) реализует общесистемный уровень управления, задача которого — осуществлять координацию работы приводов, заключающейся в установлении определенной последовательности включения отдельных приводов и необходимых выдержек времени между этими моментами. Такое простейшее управление применяется по отдельным степеням подвижности и в электромеханических, и в гидравлических работах, когда это допустимо, и, например, часто, — в захватных устройствах. 114 Глава 6 6.2. Цикловое управление отдельным приводом На рис. 6.1 показан процесс циклового программного управления приводом. Он состоит из трех этапов: разгона, движения с постоянной скоростью и торможения. Длительность второго этапа — установившегося движения с постоянной скоростью — определяется величиной заданного перемещения привода. Если эта величина меньше суммы времени разгона и торможения, второй этап вообще будет отсутствовать (пунктирная кривая на рис. 6.1). qk q V0 . q .. q a1 qн 0 t1 t2 t3 t a2 Рис. 6.1. Процесс циклового управления приводом Изображенный на рис. 6.1 процесс соответствует следующему описанию: ⎧ a1 = const при t ≤ t1 ⎪ q(t ) = ⎨0 при t1 ≤ t ≤ t2 ⎪a = const при t ≤ t ≤ t 2 3 ⎩ 2 (6.1) где а1 и а2 — ускорения разгона и торможения, или — для скоростей: ⎧ a1t при t ≤ t1 ⎪ q ( t ) = ⎨V0 при t1 ≤ t ≤ t2 ⎪V − a t − t при t ≤ t ≤ t 2) 2 3 ⎩ 0 2( где V0 = a1t1 — установившаяся скорость. (6.2) Дискретное цикловое программное управление роботами 115 Выражения (6.1) соответствуют упрощенному описанию процесса циклового управления без учета динамики демпфера, возможной упругости механической передачи и переходных процессов движения рабочего тела в трубопроводах. Все это необходимо учитывать при компьютерном моделировании привода для проведения количественных расчетов. Особенно важно учитывать упругие деформации, которые создают колебательность в приводах при их разгоне и торможении. Наиболее нежелательны колебания, возникающие при торможении привода, т. к. они затягивают процесс его остановки и, следовательно, снижают быстродействие. Колебания, возникающие на этапе разгона привода, обычно успевают затухнуть к моменту его торможения и поэтому менее вредны. Однако, если длительность этапа движения с постоянной скоростью мала, эти оба типа колебаний могут сложиться, что еще более затруднит процесс торможения. При цикловом управлении торможение привода осуществляется демпфером при наезде на него упора. Гашение при этом возможных колебаний — задача настройки демпфера, т. е. подбора величины создаваемой им силы вязкого трения. Хотя цикловое управление — это простейший способ одношагового дискретного управления, его не следует рассматривать просто как вырожденный вариант многошагового дискретного позиционного управления. Системы циклового управления принципиально отличаются от них способом позиционирования с помощью механических упоров. Это обеспечивает цикловым системам значительно бо́льшие точность и быстродействие. Что касается быстродействия, то, как следует из теории оптимальных систем управления, именно релейное управление обеспечивает для объектов типа роботов теоретически максимальное быстродействие. Поэтому, как будет показано далее, и в других системах дискретного и непрерывного управления часто вводят релейные приставки для обеспечения наибольшего быстродействия. 6.3. Совместное цикловое управление приводами манипуляторов Особенностью совместного управления приводами манипуляторов является необходимость учета их взаимовлияния (см. разд. 5.2.2). Рассмотрим это явление для циклового управления на примере манипулятора с цилиндрической системой координат, типичной для роботов с таким управлением (см. рис. 3.2). Как было выяснено ранее (см. рис. 5.4), в таком манипуляторе имеет место взаимное влияние приводов поворота ϕ и выдвижения r. На координату r действует центробежная сила, пропорциональная скорости ϕ , а на координату ϕ — кориолисова сила, пропорциональная с обратным знаком произведению ϕ r. В результате при одновременном повороте колонны манипулятора и выдвижении его стрелы центробежная сила будет ускорять выдвижение по r, а кориолисова сила — замедлять поворот ϕ. Отсюда следует, что для повышения быстродействия при выполнении манипулятором такого совместного движения, привод стрелы нужно включать как можно поз.... 116 Глава 6 же включения привода поворота колонны. В этом случае будет максимален эффект ускорения выдвижения стрелы за счет центробежной силы и минимально торможение поворота колонны кориолисовой силой. Иными словами, условием максимального быстродействия в этом случае будет начало движения по ϕ с последующим включением привода r с задержкой по времени, обеспечивающей одновременное завершение обоих движений. При выполнении совместного движения приводов ϕ и r, когда координата r должна уменьшаться, алгоритм оптимального совместного управления этими приводами будет соответственно другим. В этом случае следует, наоборот, максимально задержать начало поворота колонны относительно движения стрелы. Что касается привода подъема z, то, поскольку между ним и приводами ϕ и r взаимное влияние отсутствует, момент его включения, когда требуется движение и по z, должен выбираться с соблюдением одного условия: это движение должно закончиться к моменту окончания движений двух других приводов, не увеличивая общую длительность цикла движения манипулятора. Рассмотрим теперь особенности оптимального с точки зрения быстродействия совместного управления двумя подобными манипуляторами. Пусть это будет, например, операция обслуживания роботом пресса холодной штамповки (рис. 6.2). Робот ПР левым манипулятором берет очередную заготовку из магазина М1 и кладет ее в пресс. Одновременно правый манипулятор робота вынимает из пресса отштампованное изделие и кладет его в магазин М2. При этом, как показано на рис. 6.2, приводы каждого манипулятора осуществляют по шесть движений: 1. Выдвижение и захват объекта манипулирования. 2. Втягивание. 3. Поворот по часовой стрелке. 4. Выдвижение с освобождением объекта. П 3 М1 1 4 2 5 1 6 6 2 3 4 5 М2 ПР Рис. 6.2. Схема технологической ячейки холодной штамповки: П — пресс; ПР — промышленный робот с двумя манипуляторами; М1 и М2 — магазины Дискретное цикловое программное управление роботами 117 5. Втягивание. 6. Поворот против часовой стрелки в исходную позицию. Одновременно в крайних позициях обычно требуется вертикальное перемещение манипуляторов. Синтез управляющих программ для систем циклового управления сводится к определению величин оптимальных выдержек времени между моментами включения приводов и соответствующего значения минимального времени всего цикла работы при выполнении конкретной технологической операции. Это осуществляется с помощью компьютерного моделирования на основе математического описания динамики манипуляторов робота. При этом варьируется величина задержки включения приводов и вычисляется длительность всего цикла работы робота. В результате находятся зависимость длительности цикла от величины задержки и оптимальное значение такой задержки, соответствующее минимальной длительности цикла. 6.4. Резонансные цикловые приводы Этого типа приводы и основанные на них манипуляторы — редкий пример положительного использования упругости. В цикловой привод вводится пружина, которая растягивается (раскручивается) при движении привода в одном направлении из среднего положения и сжимается при движении в другом. Привод совершает свое циклическое движение в режиме резонансных незатухающих колебаний с нулевой скоростью в крайних точках. При этом двигатель привода осуществляет подпитку пружины энергией в середине пути при максимальной скорости движения, восполняя потери на выполняемую приводом работу, а в конечной точке движения не происходит удара об упор с рассеянием накопленной приводом кинетической энергии. В результате в 3–4 раза снижается энергопотребление, и, соответственно, может быть уменьшена мощность используемого в приводе двигателя, однако при неизбежном снижении быстродействия [10]. По существу, здесь реализована идея рекуперации энергии, ранее рассеиваемой при торможении, которая традиционно используется, например, на транспорте (маховики, отдача электроэнергии в сеть при переходе электрической машины из двигательного режима в генераторный и т. д.). 118 Глава 6 ГЛАВА 7 ДИСКРЕТНОЕ ПОЗИЦИОННОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ РОБОТАМИ 7.1. Особенности дискретного позиционного управления Типовые примеры роботов с дискретным позиционным управлением — это промышленные роботы для точечной сварки (рис. 7.1), сборки (см. рис. 3.5) и для обслуживания металлорежущих станков и другого технологического оборудования, с чем более простые цикловые роботы обычно не справляются. Рис. 7.1. Промышленный робот для контактной сварки R2000iB/200EW (Fanuc, Япония) 120 Глава 7 Благодаря применению позиционных приводов такие роботы имеют значительное число точек позиционирования рабочего органа — десятки и более. Процесс перемещения рабочего органа на очередной шаг, как и в цикловых приводах, состоит из этапов разгона, движения с постоянной скоростью и торможения (см. рис. 6.1). Однако в отличие от цикловых приводов здесь точность позиционирования, а также устойчивость и качество переходного процесса должны обеспечиваться замкнутой обратными связями системой управления приводами (см. рис. 4.1), — исключение составляют получившие небольшое распространение в робототехнике разомкнутые позиционные приводы на шаговых двигателях. Таким образом, принципиальным отличием роботов с дискретным позиционным управлением от цикловых является необходимость обеспечения требуемого качества позиционирования — за счет совершенствования системы их управления. Другое отличие — это значительно бо́льшая роль взаимовлияния приводов. Если в цикловых системах оно, как было показано ранее, может повлиять только на быстродействие, то в позиционных взаимовлияние приводов сказывается на всех показателях системы, включая точность. Позиционные системы также значительно чувствительнее к нестационарности параметров и влиянию внешних возмущений, чем цикловые, являющиеся разомкнутыми релейными системами. 7.2. Дискретное позиционное управление отдельным приводом Основной вариант алгоритма дискретного позиционного программного управления приводом соответствует структурной схеме следящей системы, показанной на рис. 4.1, которая последовательно отрабатывает заданные приращения управляемой выходной координаты qi. Эта схема может быть дополнена другими средствами коррекции, компенсирующими воздействия внешних возмущений и, прежде всего, нагрузки. Синтез оптимального алгоритма управления при необходимости обеспечить максимальное быстродействие, как уже отмечалось в главе 6, приводит к релейному управлению. Однако, поскольку такая система двухпозиционного релейного управления неустойчива в малом, при подходе к точкам позиционирования необходимо переходить на другой алгоритм управления. В результате получается система так называемого дуального управления с переменной структурой, показанная на рис. 7.2. Устройство управления непрерывного действия включается вблизи очередной точки позиционирования, т. е. при малом рассогласовании Δq = q − q3 , обеспечивая устойчивость и качественную остановку в заданной точке, а устройство релейного управления включается в момент подачи программного задания на очередной шаг, а также при возникновении больших рассогласований, вызванных любыми причинами. Дискретное позиционное программное управление роботами q3 Δq – . Δq . q3 – Непрерывное УУ Релейное УУ 121 кэ УУ0 Д М q ДС ДП Рис. 7.2. Схема системы дуального управления приводом: КЭ — коммутирующий элемент П РИМЕЧАНИЕ Коммутирующий элемент КЭ показан на рис. 7.2 условно. Он может быть, например, управляем ключами, осуществляющими нужного знака форсировку двигателя в соответствующие интервалы времени. Рассмотрим алгоритмы релейного управления, а затем вернемся к каналу непрерывного управления. На рис. 7.3 показан процесс такого оптимального по быстродействию релейного управления электрическим приводом, описываемый двумя дифференциальными уравнениями первого порядка с ограничениями по входному напряжению и по движущему моменту, т. е. по току. В соответствии с теорией оптимального управления, оптимальный алгоритм управления напряжением на входе привода состоит из трех интервалов: на первом из которых предельное значение имеет момент двигателя Мд = Мд пр, на втором — напряжение на его входе (на якоре) u = uпр и на третьем — опять Мд, но уже с обратным знаком Мд = –Мд пр. а) б) Рис. 7.3. Фазовые траектории (а) и механические характеристики (б) электропривода с релейным позиционным управлением: ϕ — угол поворота выходного вала двигателя; Мд — движущий момент; uпр — предельное значение напряжения на входе двигателя 122 Глава 7 На рис. 7.3, а, на фазовой плоскости сплошными линиями показаны оптимальные по быстродействию процессы движения при отработке задания ϕз при ограничении по движущему моменту Мд = CмI. Они состоят из парабол, выходящих из начальных точек (ϕз,0) на оси абсцисс, и общей параболы, описывающей этап торможения, — линии переключения. Пунктиром показан процесс, соответствующий наличию ограничения еще и скорости. Напомним, что момент и скорость связаны механической характеристикой двигателя. Для двигателя постоянного тока с независимым возбуждением и управлением по напряжению на якоре ограниченные переменные связаны с напряжением на якоре известными выражениями: u = I R − CE Φ ⎫⎪ ⎬. M д = Cм I ⎪ ⎭ (7.1) Здесь: I — ток в цепи якоря двигателя, имеющий ограничение I ≤ I пр , которое определяет предельное значение момента М д ≤ М д пр = Cм I пр , где: Cм — коэффициент электромагнитного момента; СЕ — коэффициент противо-ЭДС двигателя; R — активное сопротивление цепи якоря двигателя. Уравнение линии переключения выглядит так: Ψ ( ϕ , ϕ ) = 0, где Ψ ( ϕ , ϕ ) — функция переключения. Для R I пр ≤ uпр : Ψ ( ϕ , ϕ ) = ϕз − ϕ − K ϕ2 sign ϕ , (7.2) J + i2 Jд где: K = н , i — передаточное отношение редуктора привода, а Jн и Jд — 2iM д пр моменты инерции нагрузки и якоря двигателя. Алгоритм управления двигателем представляет собой двухпозиционное релейное управление с входным сигналом ±uпр . Знак этого сигнала определяется знаком функции переключения (7.2). Ограничение тока при этом осуществляется с помощью обратной связи по току. При достаточно сильной этой связи ток, а следовательно, и момент двигателя будут практически безынерционно следовать за входным напряжением u, реализуя режим моментного управления двигателем. Отрезок 1–2 на рис. 7.3 соответствует этапу разгона с постоянным ускорением, т. е. при Мд = Мд пр; участок 2–3 — продолжение этапа разгона, но при u = uпр, когда с ростом противо-ЭДС напряжение на якоре достигло своего предельного значения; 3–4 — этап движения с постоянной скоростью, который может возникать при достаточно большой длительности процесса разгона в прежнем режиме ограничения u; 4–5 — момент перехода к этапу торможения реверсированием тока якоря и, соответственно, момента; 5–6 — этап торможения при Мд = –Мд пр. Дискретное позиционное программное управление роботами 123 Неизбежные погрешности реализации описанного оптимального алгоритма управления затягивают переходный процесс — при завышении значения коэффициента К в выражении функции переключения (7.2) растет монотонность и длительность переходного процесса вследствие недоиспользования двигателя, а в противоположном случае возникает колебательность с перегрузкой двигателя. Если в приводе имеются существенные упругие деформации, алгоритм оптимального по быстродействию релейного управления осложняется увеличением числа переключений релейного входного сигнала. В этом случае применяются упрощенные квазиоптимальные алгоритмы, приводящие к некоторой потере быстродействия и сводящиеся (как и при жестком приводе) тоже к трем этапам управления: разгону с предельно допустимым ускорением вплоть до предельной скорости при достаточно большом заданном перемещении, движению с постоянной скоростью и предельно быстрому торможению. Оптимизации при этом подлежат только моменты перехода от одного этапа к другому, что реализуется выбором функции переключения. Вернемся теперь к каналу непрерывного управления, переход к которому от релейного управления осуществляется при подходе к точке позиционирования. Заметим, что вследствие малости отклонения от точки позиционирования исследование этого канала можно проводить с применением уравнений, линеаризованных относительно этой точки. Главная трудность синтеза алгоритма такого управления связана с нестационарностью параметров, т. е. с изменением параметров манипулятора при изменении его конфигурации в процессе перемещения рабочего органа по программной траектории. Принципиально здесь возможны два пути решения: применение средств динамической коррекции, обеспечивающих необходимый размер области требуемого качества управления в пространстве варьируемых параметров; подстройка устройства управления привода под меняющиеся параметры его на- грузки и другие возможные возмущения. При втором варианте имеются следующие способы подстройки: по программе, рассчитанной заранее по заданному программному движению, т. е. в функции от времени; в функции от текущего значения задающего воздействия qз(t); то же, но в функции от фактического значения q(t), поскольку в точках позицио- нирования эти значения практически совпадают; адаптивная подстройка в функции от значения выбранного показателя качества. На рис. 7.4 приведена функциональная схема системы управления привода для второго варианта подстройки по qз. Подстройка осуществляется дискретно по мере накопления изменений параметров по заранее рассчитанным и закладываемым 124 Глава 7 Рис. 7.4. Функциональная схема подстройки привода в функции от qз: БН — блок настройки в блок настройки БН зависимостям значений коэффициентов настройки устройства управления k1 и k2 от значения qз. Адаптивная подстройка привода осуществляется в функции от реального отклонения какого-либо контролируемого показателя качества управления от требуемого значения. Ее основное достоинство перед способами подстройки по программе состоит в том, что она не основана на математическом описании подстраиваемой системы и, следовательно, не требует его знания. Все же другие способы подстройки основаны на заранее рассчитанных по математическому описанию объекта управления зависимостях значений подстраиваемых параметров от состояния объекта. Поэтому неточность математического описания реального объекта ведет к погрешности и в настройке. Те случаи, в которых этот недостаток существенен или даже недопустим, являются областью применения более сложной адаптивной подстройки. На рис. 7.5 приведен вариант схемы такой подстройки для привода с типовым алгоритмом управления, где качество управления (например, колебательность) оценивается по текущим значениям q и q на выходе привода. Эту оценку осуществляет адаптер, и при отклонении значения выбранного показателя качества от требуемого значения адаптер выдает соответствующего знака воздействие на блок настройки БН, который и осуществляет подстройку привода. Специфическим для систем адаптивной подстройки приводов манипуляторов является требование к быстродействию — необходимо, чтобы корректировка качества управления осуществлялась в ходе каждого движения манипулятора, а не в результате усреднения показателей качества за несколько одинаковых программных движений. Поэтому из многих вариантов этой подстройки в робототехнике основное применение получила схема с эталонной моделью. Один из вариантов формирования адаптером такого сигнала подстройки показан на рис. 7.6. В блоке «Эталонная Дискретное позиционное программное управление роботами 125 Рис. 7.5. Функциональная схема адаптивной подстройки привода модель» заложена математическая модель объекта с выбранными в качестве эталона численными значениями его параметров. Сам объект представляет собой механическую систему, на которую воздействует подстраиваемый привод усилием Qд. По получаемым с датчиков обратной связи привода значениям выходных переменных объекта путем решения обратной задачи динамики определяется усилие Qдэ, которое соответствует эталонным параметрам объекта. Разность ΔQ = Qд – Qдэ отражает отклонение объекта от его эталонной модели. Эта разность подается на блок настройки БН для изменения настройки привода, устраняющего имеющееся отклонение. В целом вопросы адаптивного управления будут рассмотрены в главе 9. Возможные упругие деформации негативно сказываются на процессе управления, создавая колебания и затягивая процесс позиционирования (способы борьбы с этим Рис. 7.6. Схема формирования сигнала адаптивной подстройки с эталонной моделью 126 Глава 7 явлением были рассмотрены в разд. 5.2.3). Определенные возможности уменьшения упругих деформаций возникают, когда требования к быстродействию достаточно ослаблены. В этом случае можно существенно уменьшить возникающие при торможении упругие колебания за счет удлинения этого процесса и соответствующего снижения ускорений. Процесс релейного управления до включения канала непрерывного управления перед остановкой привода также существенно влияет на остаточную упругую колебательность. За счет выбора алгоритма релейного управления в ряде случаев удается практически полностью подавить эти колебания. Если запросы по быстродействию невысоки, и не требуется оптимизация по быстродействию, т. е. их может обеспечить система непрерывного управления, релейное устройство управления оказывается ненужным, и система управления позиционными приводами сводится к одноканальной. Однако при этом, поскольку данная система управления работает в течение всего процесса очередного движения от точки к точке, при ее исследовании может оказаться, что уже нельзя прибегать к линеаризации. Кроме того, упругие колебания здесь будут влиять на систему и в начале движения, на этапе разгона. Впрочем, поскольку при позиционном управлении траектория движения между точками позиционирования не регламентируется, эти колебания должны учитываться только, если они не успевают затухнуть к концу шага. 7.3. Совместное дискретное позиционное управление приводами манипулятора Это второй уровень управления манипулятором, который при программном управлении осуществляет координированное управление приводами отдельных степеней подвижности, обеспечивающее перемещение рабочего органа манипулятора по последовательности точек, заданных в виде программной дискретной траектории с остановкой в каждой точке в заданные моменты времени tk . Этот алгоритм реализуется подачей на приводы заданий в виде дискретных программ qз(tk), которые находятся по хрз(tk) решением обратной задачи кинематики для манипулятора: qз (tk ) = f −1[ xpз (tk )] . Эти задания даются в виде последовательности приращений относительных координат: Δqз = qз (tk ) − qз (tk −1) и времени отработки каждого такого шага: Δtk = tk − tk −1. Дискретное позиционное программное управление роботами 127 В результате отработки всеми приводами очередного шага рабочий орган манипулятора переместится в следующую точку дискретной программной траектории с заданной ориентацией. В отличие от рассмотренного ранее процесса управления отдельным приводом, при таком одновременном управлении всеми приводами необходимо учитывать их взаимовлияние через общую механическую систему манипулятора, на которую они работают (см. разд. 5.2.2). Поскольку речь идет о программном управлении, это взаимовлияние можно учесть при программировании путем корректировки программ и программного изменения настройки систем управления приводов. Рассмотрим, как зависит взаимовлияние приводов от характера их относительного движения, и как можно за счет корректировки этих движений при необходимости ослабить такое влияние. На рис. 7.7 приведена двухкоординатная дискретная траектория, реализуемая с помощью двух приводов по координатам q1 и q2 соответственно. Время t здесь является параметром. а) б) Рис. 7.7. Двухкоординатные дискретные траектории позиционного программного управления: а — кинематический режим (малые скорости); б — динамический режим Рассмотрим вначале процесс управления на кинематическом уровне, т. е. при достаточно малых скоростях движения, когда можно не учитывать инерцию. На рис. 7.7, а показаны варианты траекторий от начала координат до следующей программной точки, соответствующие разным соотношениям скоростей приводов. При увеличении скорости первого привода относительно второго траектория опускается (линия 1) в пределе до ломаной линии, состоящей из горизонтального и вертикального участков (линия 2). При увеличении скорости второго привода траектория станет, наоборот, подниматься вверх (линия 3). Очевидно, что траектория будет прямой линией при выборе значений скоростей приводов пропорционально заданным им перемещениям. В этом случае оба привода одновременно закончат свое движение и остановятся, а траектория будет иметь минимальную длину. 128 Глава 7 При этом и взаимовлияние приводов в динамике будет минимальным. Действительно, если приводы тормозятся одновременно, соответственно станет снижаться и возможное их влияние друг на друга при их позиционировании в заданных точках. Если, например, как показано на рис. 7.7, б, перемещение из точки 1 в точку 2 происходит по вогнутой траектории, первый привод начнет тормозиться, когда второй движется еще с большей скоростью. В результате качество позиционирования первого привода может быть ухудшено возмущениями со стороны второго привода. Таким образом, чтобы минимизировать взаимовлияние приводов при их позиционировании, следует при программировании устанавливать на каждом шаге движения их скорости пропорционально заданным перемещениям. Этот вывод сделан при пренебрежении инерцией приводов. Ее влияние и различие в динамических характеристиках приводов скажутся на траекториях, как показано на рис. 7.7, б, вплоть до «забросов» траекторий за пределы прямоугольников, ограниченных вертикальными и горизонтальными линиями (пунктирные траектории между точками 1 и 2). Поэтому в общем случае с учетом динамики приводов для обеспечения одновременного торможения приводов могут потребоваться другие соотношения их программных скоростей, отличные от пропорциональных перемещениям, как при кинематическом подходе. Если выбором программных движений приводов свести к минимуму их взаимовлияние, система программного управления манипулятора распадается на практически автономные системы управления отдельных приводов, рассмотренные в разд. 7.2. Выявленное, например, при компьютерном моделировании какое бы то ни было достаточно существенное нежелательное взаимовлияние приводов можно скомпенсировать перекрестными корректирующими связями, как показано в разд. 5.2.2. 7.4. Общий порядок исследования динамики и синтеза алгоритмов дискретного позиционного программного управления Этот порядок состоит из следующих этапов: 1. Составление математической модели механической системы и неварьируемых частей приводов, реализованной в виде компьютерной модели. 2. Анализ этой модели управления с целью определения диапазонов возможного изменения ее параметров, гибких деформаций и взаимовлияний степеней подвижности. Имеются в виду диапазоны изменения параметров механической системы и полезного груза, в рамках которых должно быть обеспечено требуемое качество управления. Аналогично, заданием диапазонов соответствующих возмущений, учитываются взаимовлияния приводов. 3. Декомпозиция системы управления путем разбиения ее на системы управления отдельных приводов и их автономный синтез. Дискретное позиционное программное управление роботами 129 4. Синтез алгоритма общесистемного уровня управления системой приводов манипулятора. 5. Анализ влияния неучтенных ранее нелинейностей и других особенностей системы, включая взаимовлияния и гибкие деформации с корректировкой ранее полученных решений. 6. Выбор и отработка способа программирования системы управления. Управляющая программа, реализующая требуемую дискретную траекторию движения рабочего органа манипулятора, может быть синтезирована двумя способами. Первый способ заключается в решении обратной задачи кинематики манипулятора на основе его компьютерной модели. Второй способ — это обучение с привлечением человека-оператора. Оператор, управляя последовательно отдельными приводами манипулятора через его устройство управления, выводит рабочий орган манипулятора в заданные точки позиционирования и заносит в память устройства управления соответствующие показания датчиков положения приводов. Совокупность этих данных и составит управляющую программу, которая затем и воспроизводится. 130 Глава 7 ГЛАВА 8 НЕПРЕРЫВНОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ РОБОТАМИ 8.1. Особенности непрерывного управления роботами Типичные роботы с непрерывным, называемым контурным, управлением — это промышленные роботы для нанесения покрытий, для дуговой сварки и резки. На рис. 4.6 и 8.1 показаны примеры таких роботов. Их главное отличие от роботов с дискретным позиционным управлением заключается в непрерывном движении рабочего органа манипулятора по траектории. Сама программная траектория при этом может задаваться и в виде дискретной функции времени, т. е. последовательности точек, но рабочий орган проходит эти точки без остановок, а не так, как это бы делалось при дискретном позиционном управлении. Отсюда — принципиальное отличие систем непрерывного управления от дискретных позиционных в плане динамики: если в дискретных позиционных системах существенна только статическая точность в точках позиционирования, то в непрерывных требуется динамическая точность движения по заданной траектории. Соответственно, если в дискретных позиционных системах устойчивость и качество переходных процессов оцениваются только в этих точках, то при непрерывном управлении необходимо обеспечить эти требования также непрерывно по всей траектории движения. В непрерывных системах, как и в дискретных, тоже может для повышения быстродействия применяться дуальное управление — в виде сочетания непрерывного управления с релейным при больших отклонениях от задания. Однако, если в системах дискретного управления основное время движения приходится на релейное управление, а переход к непрерывному управлению осуществляется только вблизи точек позиционирования, в системах непрерывного управления основным режимом является именно непрерывное управление, а возможный переход к релейному осуществляется эпизодически при возникновении больших отклонений от программной траектории движения. Все эти особенности систем непрерывного управления приводят к принципиальному отличию их программирования от программирования дискретных позиционных 132 Глава 8 Рис. 8.1. Электрический промышленный робот для дуговой сварки (FANUC, Япония) систем. В дискретных позиционных системах управляющая программа, которая отрабатывается приводами, — это программная последовательность точек позиционирования, в которых должна происходить остановка приводов. Для непрерывных систем управления требуемая программная траектория и реализующая ее управляющая программа оказываются разными понятиями, которые могут совпадать только в частных случаях при очень малых скоростях движения. Действительно, если подать на приводы манипулятора программные траектории qз(t), рассчитанные по заданной программной траектории его рабочего органа хрз(t) путем решения обратной задачи кинематики: qз ( t ) = f −1 ⎡⎣ xpз ( t ) ⎤⎦ , то их отработка произойдет с неизбежным динамическим запаздыванием, как это показано на рис. 8.2. Соответствующая ошибка Δq, очевидно, будет тем больше, чем выше скорость движения. Способы ее снижения известны из теории автоматического управления. Во-первых, поскольку речь идет о программном управлении, эту ошибку можно устранить добавкой к программной траектории заранее рассчитанной динамической коррекции Δ к (t ), которая должна скомпенсировать указанное динамическое запаздывание. Непрерывное программное управление роботами 133 В результате, как показано на рис. 8.2, приводы будут отрабатывать управляющую программу: G ( t ) = qз ( t ) + Δ к ( t ) , где Δ к ( t ) — динамическая коррекция. Соответствующую управляющую программу можно рассчитать и сразу — путем решения обратной задачи динамики по математическому описанию манипулятора с приводами. Рис. 8.2. Динамическое запаздывание q(t) при отработке программной траектории qз(t) Управляющую программу можно находить также экспериментально — методом обучения на реальном роботе. Существуют два способа такого обучения. Первый — путем непрерывного перемещения рабочего органа манипулятора рукой оператора с записью сигналов с датчиков обратной связи приводов. Для того чтобы двигатели манипулятора не препятствовали этому, его конструкция должна предусматривать возможность их отсоединения от механической системы манипулятора (с сохранением соединения с ней датчиков обратной связи). Развитием этого способа программирования методом обучения стало применение в них современных способов управления манипуляторами человеком-оператором (см. главу 10). Так, программирование путем перемещения рабочего органа манипулятора оператором может осуществляться с помощью трехстепенной задающей рукоятки, которая укрепляется на время программирования на рабочем органе манипулятора. Оператор, смещая эту рукоятку с нейтрального положения в нужном направлении, осуществляет перемещение рабочего органа манипулятора, управляя с помощью контактов задающей рукоятки приводами манипулятора через его устройство управления. В таком варианте этот способ программирования применим ко 134 Глава 8 всем манипуляторам и не требует отсоединения двигателей приводов, как в его исходном варианте. Второй способ заключается в последовательной установке оператором рабочего органа манипулятора с помощью приводов в точках, заранее выбранных на программной траектории, с записью показаний датчиков обратной связи приводов, как при программировании систем дискретного позиционного управления. Управление приводами манипулятора при этом обычно осуществляется через его устройство управления с помощью переносного пульта. Для повышения точности и быстродействия при таком программировании на рабочий орган манипулятора может укрепляться передающая телевизионная камера, дающая крупным планом на экран пульта управления изображение объектов внешней среды, с которыми манипулятор должен взаимодействовать. Для формирования заданной траектории между запрограммированными точками при воспроизведении необходимого непрерывного движения используется интерполятор. Необходимая динамическая коррекция при программировании таким способом подбирается экспериментально путем многократного пробного воспроизведения требуемой траектории за заданное время. Другой очевидный путь уменьшения динамической ошибки — это повышение быстродействия самой системы автоматического управления введением в нее динамической коррекции, которая должна формироваться непосредственно в ходе отработки подаваемой на вход системы заданной программной траектории. Конечно, этот путь значительно сложнее, поскольку мы игнорируем априорное знание подлежащей реализации траектории, но, с другой стороны, он упрощает программирование робота, сводя его к кинематическому синтезу программной траектории для приводов. Этот путь будет рассмотрен в разд. 8.2. Из изложенного следует, что в целом возможны два варианта программирования систем непрерывного управления: кинематическое и динамическое. Первый вариант соответствует малым скоростям движения рабочего органа (примерно менее 0,5 м/с), когда динамической погрешностью отработки программной траектории при имеющемся быстродействии системы управления можно пренебречь. Второй вариант относится к большим скоростям, когда необходимо вводить динамическую коррекцию в управляющую программу и, в том числе, при аналитическом ее расчете решать обратную задачу динамики, а не кинематики, как в первом варианте. 8.2. Непрерывное управление отдельным приводом Типовая схема привода с непрерывным управлением та же самая, что и при дискретном позиционном управлении (см. рис. 4.1). Однако, как показано ранее, режим ее работы и, соответственно, основные требования к ней совершенно иные, поскольку система непрерывного действия должна непрерывно поддерживать соответствие заданию перемещение q и его скорость q. Непрерывное программное управление роботами 135 Для уменьшения отклонений от программной траектории при больших возмущениях, как уже отмечалось, эта система непрерывного управления может быть дополнена релейной приставкой, подключающейся при определенной величине рассогласования Δqi = qi − qiз . Порядок синтеза алгоритма работы такой приставки был изложен в разд. 7.2. Рассмотрим алгоритмы динамической коррекции привода, обеспечивающие необходимую компенсацию ошибки воспроизведения заданной программной траектории. Как ранее отмечено, принципиально возможны следующие способы такой коррекции: коррекция программной траектории; последовательная динамическая коррекция в прямом канале входного воздейст- вия; параллельная динамическая коррекция в канале обратной связи по ошибке вос- произведения входного сигнала. Первый способ был рассмотрен в разд. 8.1. Он применим только в системах программного управления и заключается в расчете по qз (t ) управляющей программы U пз (t ). Далее мы рассмотрим следующие два способа динамической коррекции, имеющие более общее применение не только в системах программного управления. 8.2.1. Непрерывное управление приводом с последовательной коррекцией Последовательное корректирующее звено (рис. 8.3) должно осуществлять компенсацию инерционности и в целом неидеальности привода, в результате чего должно обеспечиваться равенство q = qз. Поэтому данное звено часто называют компенсатором. Очевидно, если оператор этого звена Ак будет обратен оператору привода, т. е. Aк = AП−1 , то общий оператор привода с компенсатором Aк Aп = 1, и привод будет без искажения повторять на выходе q входной сигнал qз, разумеется, с конечной точностью, определяемой точностью соответствия оператора Ак реальному приводу. Рис. 8.3. Последовательная динамическая коррекция привода 8.2.2. Непрерывное управление приводом с коррекцией с помощью обратных связей По существу, в типовой схеме привода (см. рис. 4.1) уже есть подобная внутренняя обратная связь по скорости, однако эта коррекция является типовым минимумом, необходимым для повышения качества переходных процессов. При довольно ма- 136 Глава 8 лых скоростях программного движения эта коррекция вполне может оказаться достаточной и для обеспечения интересующей нас сейчас динамической точности отработки входного воздействия. Однако с повышением требований к быстродействию соответственно требуется дополнительная коррекция. Ее алгоритм может быть синтезирован общими методами теории автоматического управления с использованием уже отработанных типовых решений. Приводы манипуляторов имеют следующие особенности, которые надо при этом учитывать: возможное наличие гибких звеньев, нестационарность нагрузки со стороны механической системы манипулятора и наличие взаимовлияний приводов. Последняя особенность и ее учет были рассмотрены в разд. 5.2.2, поэтому здесь мы подробнее остановимся на первых двух особенностях. Упругие деформации и вызываемые ими колебания в условиях непрерывного управления могут возникать при резких изменениях направления или скорости движения по траектории, а также под влиянием внешних возмущений. При достаточно плавной траектории и отсутствии значительных возмущений они практически отсутствуют. Методы борьбы с этими колебаниями уже были рассмотрены в главе 7. В части управления они заключаются, прежде всего, во введении в устройстве управления привода дополнительных настроечных параметров, специально предназначенных для подавления упругих колебаний. Эта возможность основана на том, что частоты упругих колебаний обычно выше спектра частот программных движений. Поэтому при синтезе алгоритма управления можно вначале считать механическую систему жесткой, а затем, учтя в математической модели гибкие звенья, осуществить синтез контуров с дополнительными варьируемыми параметрами, обеспечивающими частотную отстройку от программного движения. Дополнительные настроечные параметры реализуются введением демпфирующих обратных связей по упругим деформациям (например, по их скорости, что создает искусственную вязкость), по связанным с ними другими переменными или с применением «наблюдателей», осуществляющих расчет таких деформаций по этим переменным. Другим, тоже уже упоминавшимся, способом снижения упругих колебаний является коррекция самих программных траекторий путем их сглаживания, чтобы не возбуждать этих колебаний. Наконец, иногда можно с этой же целью при резких изменениях программной траектории снижать быстродействие привода программно или с помощью последовательного корректирующего звена, идя при этом на соответствующее увеличение динамической погрешности ради того, чтобы сбить самые большие и продолжительные упругие колебания. В результате в целом погрешность отработки программной траектории может быть существенно снижена. Рассмотрим вторую указанную особенность — нестационарность параметров нагрузки приводов, присущая механической системе манипулятора, включая полезную нагрузку его рабочего органа. Задача заключается в том, чтобы во всем диапа- Непрерывное программное управление роботами 137 зоне изменения этих варьируемых параметров обеспечить не только устойчивость, но и требуемые качество переходных процессов и точность отработки программной траектории. Способы решения этой задачи известны. Это расширение областей устойчивости и качества в пространстве варьируемых параметров за счет соответствующей коррекции, подстройка устройства управления привода, и, наконец, переход к принципиально новым алгоритмам управления, обеспечивающим робастность, т. е. структурную нечувствительность качества управления к изменениям параметров системы и другим возмущениям. Первый способ пригоден при изменениях варьируемых параметров в достаточно ограниченном диапазоне и поэтому не дает общего решения — в отличие от следующих двух. Его реализация требует синтеза алгоритма управления с выбором коррекции, обеспечивающей при фиксированной настройке сохранение требуемого качества управления во всем диапазоне изменения варьируемых параметров. Следующий способ обеспечения требуемого качества управления при изменении параметров системы — это подстройка привода. Этот способ позволяет обеспечить более высокое качество управления и в большем диапазоне изменения параметров. В непрерывных системах управления применяются те же виды подстройки, что и в дискретных позиционных системах, рассмотренные в разд. 7.2: программная подстройка, подстройка в функции от qз или q и адаптивная подстройка (см. рис. 7.4 и 7.5). Вместе с тем, для непрерывных систем, как значительно более сложных в отношении динамики, предложены и более совершенные способы адаптивной подстройки, основанные на алгоритмах искусственного интеллекта, которые будут рассмотрены в главе 9, посвященной системам адаптивного и интеллектуального управления. 8.3. Робастные системы непрерывного управления приводов Рассмотрим последний из трех перечисленных ранее способов управления приводов с существенно нестационарной нагрузкой. Робастные системы управления — это системы, у которых структура, т. е. алгоритм управления, обеспечивает принципиальную независимость (инвариантность) качества управления от значения параметров системы и возмущений. Для приводов манипуляторов это означает, прежде всего, нечувствительность к изменениям конфигурации их механической системы, изменениям полезной нагрузки в рабочем органе и к взаимовлияниям приводов. Из этого следует, что такое управление делает приводы для уровня их совместного управления автономными и стационарными. Далее мы рассмотрим два типа таких систем управления, предложенных именно для управления роботов: система управления с обратной связью по ускорению; релейная система управления. 138 Глава 8 8.3.1. Системы непрерывного управления с обратной связью по ускорению Ускорение, как известно, является признаком и мерой нарушения баланса сил, действующих на систему, т. е. мерой любого возмущения — внешнего или внутреннего, включая параметрическое, — нарушающего установившееся состояние системы. Регулятор с обратной связью по ускорению должен парировать любые возмущения, стабилизируя режим управляемого им объекта. Эта идея была предложена и реализована еще в прошлом веке Сименсами в регуляторе скорости турбины и возродилась в робототехнике как весьма плодотворная для создания робастных систем управления. На рис. 8.4 приведена основанная на этом принципе схема системы управления приводом [11]. Рис. 8.4. Схема системы управления с обратной связью по ускорению Здесь обратная связь по ускорению показана пунктиром. Поскольку в прямом канале имеется интегрирующее звено, эквивалентное преобразование исходной схемы путем переноса выхода этой обратной связи за это звено позволяет обойтись без сигнала по ускорению, что упрощает схему до варианта, изображенного сплошными линиями. Поэтому, хотя в окончательном виде схема не содержит обратной связи по ускорению, она реализует именно этот принцип управления. Формально эта схема представляет собой вариант обычного ПИД-регулятора с программно задаваемой уставкой qз. При достаточно сильной скоростной обратной связи, эквивалентной в исходной схеме обратной связи по ускорению, последняя будет парировать все возмущения, включая параметрические, поддерживая равенство q(t) = qз(t). Описанная схема была синтезирована аналитически как решение задачи обеспечения робастности. Главный результат этого синтеза — методика определения значений настроечных коэффициентов схемы, обеспечивающих робастность по устойчивости и качеству управления. Поясним порядок этого синтеза. Пусть объект управления описывается дифференциальным уравнением второго порядка произвольного вида, в общем случае нелинейным, нестационарным и с неиз- Непрерывное программное управление роботами 139 вестными параметрами. От уравнения требуется только одно — разрешимость относительно старшей производной q, т. е. возможность представить его в виде: q = F ( q , q, uп ) , (8.1) где: uп — входное управляющее воздействие на объект. Заметим, что для приводов манипуляторов это всегда выполнимо, т. к. в уравнении динамики (5.5) q — множитель. Для описанной далее процедуры синтеза алгоритма управления требуется, кроме того, чтобы существовала и была положительна ∂F производная , что также всегда имеет место, т. к. uп — входное управляющее ∂ uп воздействие на объект. Поставим задачу синтезировать алгоритм управления для uп по условию, чтобы переходные процессы на выходе объекта соответствовали некоторой эталонной модели в виде стационарного линейного объекта второго порядка с желаемым качеством переходных процессов. (Заметим, что для физической реализуемости искомого решения надо, чтобы принятая инерционность этой модели была близка инерционности искомого объекта.) Уравнение переходных процессов для такой эталонной модели имеет вид q + k ′q + kq = 0. Это уравнение для приращений представим так: Δq = Fэ ( Δq , q ) = −k ′Δq − k Δq, (8.2) где: Δq = q − qз . Отсюда можно записать: q = Fэ + qз . (8.3) Решения поставленной задачи найдем, потребовав, чтобы при t → ∞ F, т. е. q из (8.1), стремилось к выражению ( Fэ + qз ) из (8.3). Это может обеспечить алгоритм астатического управления, соответствующий структурной схеме, приведенной на рис. 8.5, а: t uп = k0 ∫ ⎣⎡ F − ( Fэ + qз ) ⎦⎤ dt. (8.4) 0 Здесь с учетом выражений (8.1) и (8.2): uп = k0 ( Δq + k ′Δq + k Δq ) . p (8.5) Соответствующая схема, представленная на рис. 8.5, б, эквивалентным преобразованием путем переноса воздействий по q и q за интегрирующее звено приводится к окончательному виду, показанному на рис. 8.4. 140 Глава 8 а) б) Рис. 8.5. Синтезированная структурная схема управления по ускорению Как следует из изложенного, в основе выполненного синтеза лежит идея управления по эталонной модели, когда за счет сильного управления объектом последний ведет себя как эта модель. Этим и обеспечивается независимость качества управления не только от численных значений параметров объекта, но и от его структуры. Действительно, при выводе алгоритма управления вообще не использовалось уравнение объекта управления. Значения коэффициентов настройки определяются следующими условиями: контур гибкой обратной связи по ускорению (по скорости за интегрирующим звеном) должен иметь быстродействие в 5–6 раз больше, чем внешний контур по q, чтобы отработка приводом задания qз(t) происходила на фоне реализуемой гибкой обратной связью робастности привода. Это обеспечивается выбором значения коэффициента k0; желаемое качество переходных процессов определяется соотношением коэффи- циентов k и k ′ . Последовательная динамическая коррекция в виде прямого воздействия по q з не имеет принципиального значения, т. к. не влияет на робастность и устойчивость привода. Ее назначение — повышение быстродействия отработки задающего воздействия qз. Проведенный синтез и схема на рис. 8.4 относятся к объекту управления второго порядка. Для приводов манипуляторов это означает возможность пренебрежения Непрерывное программное управление роботами 141 инерционностью или самого привода, или его нагрузки. Последнее, например, часто имеет место в электроприводах с редуктором в результате приведения момента инерции двигателя к выходу редуктора (см. разд. 5.2.5). На рис. 8.6 приведена схема системы управления для объектов третьего порядка, полученная аналогичным синтезом [11]. Она отличается от схемы на рис. 8.4 добавлением — в соответствии с возросшим порядком уравнения эталонной модели — второго интегрирующего звена. Рис. 8.6. Схема системы управления по ускорению объекта третьего порядка 8.3.2. Релейные системы управления В теории автоматического управления рассматриваются два фундаментальных принципа управления: с обратной связью по отклонению и по возмущению от предписанного режима. Ранее, в робастных регуляторах по ускорению, был применен второй принцип выявления и парирования возмущений. Здесь мы рассмотрим создание того же эффекта робастности с помощью предельно сильной обратной связи по отклонению — релейной обратной связи. Как известно, отрицательная обратная связь ослабляет влияние всех внешних и внутренних возмущений, включая нестабильность параметров и помехи, и этот эффект растет с усилением обратной связи. При увеличении коэффициента обратной связи в пределе получается релейная обратная связь, которая эквивалентна звену непрерывного действия с коэффициентом передачи, равным бесконечности. Следовательно, такая предельно сильная обратная связь должна обеспечить и предельную независимость охватываемого ею объекта от любых возмущений, т. е., в рассматриваемом случае, — робастность привода. 142 Глава 8 На рис. 8.7 показана схема такой релейной системы управления привода. Как и в типовой схеме привода непрерывного действия (см. рис. 4.1), здесь имеются две обратные связи: по положению q и по скорости q. В [12] с помощью прямого метода А. М. Ляпунова доказана ее абсолютная устойчивость для объектов второго порядка. Для объектов третьего порядка необходимо соответственно повысить порядок гибкой обратной связи, т. е. перейти к обратной связи по ускорению. Это отражено введением дифференцирующего звена, показанного пунктиром на схеме, приведенной на рис. 8.7. В манипуляторах такие приводы ведут себя как автономные со стабильным качеством управления при изменении параметров, т. е. действительно являются робастными. Рис. 8.7. Релейная система управления привода Поскольку в такого типа системах двухпозиционного релейного управления в установившемся режиме неизбежны автоколебания (неустойчивость в малом), здесь необходимо для их устранения принимать специальные меры. Простейшее средство — введение в релейную характеристику зоны нечувствительности. Это применимо, когда требование к точности управления допускает статическую ошибку, обусловленную такой зоной нечувствительности. Другой путь — использование скользящего режима путем повышения частоты автоколебаний за счет соответствующей коррекции и, соответственно, снижения их амплитуды. При этом возникает задача обеспечения устойчивости скользящего режима во всем диапазоне изменения параметров системы. Релейное управление создает еще одну трудность — при наличии гибких звеньев в системе оно при релейных переключениях двигателя неизбежно возбуждает в приводе упругие колебания, для борьбы с которыми необходимо принимать дополнительные специальные меры. Общим для рассмотренных робастных систем управления является то, что обеспечиваемая ими независимость качества управления от всех возмущений достигается утяжелением динамического режима управляемого объекта. Поэтому такие способы управления неизбежно отрицательно сказываются на ресурсе приводов. Следовательно, применение их оправдано лишь в тех случаях, когда без них невозможно обеспечить технические требования к динамике системы. Непрерывное программное управление роботами 143 Завершая рассмотрение способов непрерывного управления отдельными приводами, обратим внимание на возможность их совместного применения с целью сложения их достоинств и компенсации недостатков. Так, как уже отмечалось, совместное применение последовательной коррекции и обратных связей позволяет упростить алгоритмы обоих способов, получив при этом качество управления, недостижимое при применении только одного из них. 8.4. Совместное непрерывное управление приводами манипулятора Это второй уровень управления манипуляторами, основная задача которого — координация его приводов для обеспечения движения рабочего органа манипулятора по заданной траектории. Как уже отмечалось в начале этой главы, в случае непрерывного движения эта задача для системы непрерывного управления манипулятором существенно сложнее, чем в системах дискретного позиционного управления, т. к. здесь необходимо контролировать не только положение рабочего органа, но и вектор его скорости для того, чтобы обеспечить требуемую точность его движения по программной траектории. Алгоритм совместного управления приводами зависит от алгоритмов управления отдельными приводами, возможные варианты которых были рассмотрены в разд. 8.3. Если приводы имеют робастные системы управления, функция уровня совместного управления сводится к минимуму — к выдаче на приводы программных траекторий. Синтез самих этих траекторий осуществляется на этапе программирования (аналитически, в данном случае — путем решения обратной задачи кинематики, или экспериментально — методами обучения). Если приводы неробастные, но в них предусмотрена динамическая коррекция программного движения, позволяющая подавать на них задания в виде программной траектории qiз(t), функция уровня совместного управления дополняется только задачей общей коррекции и компенсации взаимовлияния приводов. То же относится и к случаю, когда в приводах нет указанной динамической коррекции, а она вводится в управляющую программу. Наконец, если нет и последнего, функция второго уровня управления дополняется осуществлением динамической коррекции всей системы приводов. Рассмотрим этот самый общий случай, т. е. способы коррекции на общесистемном уровне, и опишем способы последовательной коррекции с помощью обратных связей, которые ранее были рассмотрены для отдельного привода. Выходными переменными здесь соответственно являются вектор положения рабочего органа хр или кинематически связанный с ним вектор q(q1,q2,...,qn) и вектор усилия на рабочем органе Qp. 144 Глава 8 8.4.1. Системы совместного непрерывного управления приводами манипулятора с последовательной коррекцией (с компенсатором) Рис. 8.8, а иллюстрирует эту задачу. Здесь: Амп — известный оператор манипулятора с приводами; Ак — подлежащий определению оператор последовательного звена — компенсатора. Найдем выражение для Ак из условия обеспечения равенства q(t) = qз(t). Очевидно, что, по-прежнему, как и при рассмотрении отдельного при−1 вода, это будет иметь место, если АкАмп = 1, т. е. при Ак = Aмп . Отсюда можно найти выражение для Ак, решая обратную задачу динамики для манипулятора с приводами, т. е. для системы уравнений: A ( q ) p 2 q + b ( pq, q ) + c ( q ) = Qд − Qв ⎫ ⎪ Qд = А п (U п ) ⎬, ⎪ U п = Aк (qз ) ⎭ (8.6) где Ап — оператор системы приводов. Подставив в (8.6) q = qз, находим: U п = Aп−1 ⎡⎣ A ( q ) p 2 qз + b ( pq, q ) + c ( q ) ⎤⎦ . а) б) Рис. 8.8. Схема манипулятора с компенсатором (8.7) Непрерывное программное управление роботами 145 На рис. 8.8, б приведена соответствующая структурная схема, где значок ^ над A(q), b(pq,q), c(q) и Ап означает оценку этих выражений, т. е. принятые в схеме компенсатора их математические модели. Приведенную здесь схему компенсатора −1 как инверсию операможно получить и сразу — на основании равенства Ак = Aмп тора манипулятора. На этом основано еще одно название устройства такой коррекции — инверсный регулятор. В схеме компенсатора на рис. 8.8, б звено Aˆп−1 аналогично рассмотренному в разд. 8.2.1 компенсатору привода, но уже в виде инверсии оператора Ап системы всех приводов манипулятора. Звено Â ( q ) компенсирует инерционность механической системы манипулятора и взаимовлияния ее степеней подвижности, описываемые этой матрицей, а звено [bˆ( pq, q ) + cˆ(q )] аналогично компенсирует скоростные и гравитационные силы. Имеющиеся в схеме компенсатора воздействия по q и q отражают нестационарность манипулятора, реализуя векторы bˆ( pq, q ) и cˆ( q) как функции этих выходных переменных, т. е. осуществляют подстройку звена [bˆ( pq, q ) + cˆ(q )] . Заметим, что для систем программного управления эта подстройка компенсатора может производиться в виде функции не только векторов q и q, но и связанных с ними программной траекторией qз или t, т. е. принципиально в этом случае применимы все способы подстройки, которые были рассмотрены в разд. 8.2.2 для отдельных приводов. Здесь может быть использована и описанная там адаптивная подстройка в функции от контролируемого качества процесса управления, которая будет компенсировать также и неточности математической модели манипулятора. Воздействие Uп на выходе компенсатора, определяемое выражением (8.7), — это поступающая на приводы управляющая программа, которая формируется компенсатором путем решения обратной задачи динамики для манипулятора, но не заранее, как это описано в разд. 8.1, а в реальном времени в темпе поступления на вход системы заданной программной траектории qз(t). На рис. 8.9 в качестве примера приведена схема компенсатора для рассмотренного ранее трехзвенного манипулятора с цилиндрической кинематической схемой (см. рис. 3.2) для простоты — без учета динамики приводов (см. рис. 5.4). Из степеней подвижности ϕ, z и r самое простое корректирующее звено получилось в канале z в виде двойного дифференцирующего звена, которое компенсирует механическую инерцию привода Jz. Коррекция в каналах ϕ и r сложнее — из-за наличия их взаимовлияния, описываемого звеньями bϕ и br. Их инверсия в компенсаторе формируется с помощью операций умножения и возведения в квадрат. Компенсатор превращает манипулятор в идеальный объект, без запаздывания повторяющий в своих звеньях программную траекторию qз(t). Однако компенсатор, как всякое последовательное корректирующее звено, имеет следующие недостатки, характерные для всех разомкнутых систем: неточность компенсации, вызванную неизбежной неточностью математичес- кой модели объекта, по которой она синтезируется. В частности, компенсатор Рис. 8.9. Структурная схема трехзвенного манипулятора с компенсатором 146 Глава 8 Непрерывное программное управление роботами 147 игнорирует упругие колебания в механической системе манипулятора, которые возникают на выходе приводов и могут подавляться только путем соответствующего локального управления каждым приводом в отдельности; ухудшение устойчивости скомпенсированного объекта вплоть до неустойчиво- сти при перекомпенсации, поскольку компенсатор в идеале выводит компенсируемый объект на границу устойчивости, компенсируя его инерционность; тяжелый динамический режим объекта, обусловленный форсирующим действи- ем компенсатора для преодоления инерционности объекта, и по той же причине повышение уровня помех на входе приводов; компенсатор выполняет свои функции только при достаточно ограниченных входных воздействиях, при которых приводы манипулятора не выходят в насыщение. Причем форсирующее действие компенсатора способствует последнему. Из изложенного можно сделать следующие выводы: настройку компенсатора надо делать c недокомпенсацией, заведомо превы- шающей возможные неточности используемой при его синтезе математической модели объекта; последовательную коррекцию в виде компенсатора следует рассматривать как средство улучшения динамических свойств объекта управления, а собственно управление должно осуществляться по рассогласованию Δq = q – qз, т. е. с помощью устройства управления с отрицательной обратной связью. На рис. 8.10 приведена схема системы программного управления манипулятором с компенсатором, которая соответствует последнему выводу. Схема включает компенсатор, который, не давая полной компенсации, развязывает приводы, делая их практически автономными, и компенсирует в основном нестабильность их нагрузки, снимая проблему подстройки. Поэтому устройство управления приводами может быть выполнено по простейшей типовой схеме с внутренней скоростной об- Рис. 8.10. Схема системы непрерывного управления манипулятором: МС — механическая система; П — приводы 148 Глава 8 ратной связью по q и релейной приставкой, подключаемой при больших рассогласованиях. Если проиллюстрировать схему на рис. 8.10 на примере манипулятора с компенсатором на схеме рис. 8.9, то на вход каждого из трех каналов этой схемы надо ввести автономное непрерывное устройство управления по отклонению Δqi = qi – qiз с обратной связью по qi и с релейной приставкой, действующей в функции этих же сигналов. 8.4.2. Системы совместного управления приводами манипулятора с динамической коррекцией с помощью обратных связей Рассмотрим теперь возможности динамической коррекции системы управления манипулятором с помощью обратных связей. Задача заключается в синтезе алгоритма такого управления в функции от вектора рассогласования Δq = q – qз и выяснении его возможностей в отношении обеспечения качества отработки qз. Рис. 8.11, а иллюстрирует эту задачу. Здесь Ар — подлежащий определению оператор устройства управления по Δq манипулятора, представленного оператором Амп. Такое устройство можно назвать программным регулятором, поскольку его задача — обеспечить устойчивость и требуемое качество удержания рабочего органа манипулятора на программной траектории. а) q3(q13,q23,...,qn3) UП Ap q(q1,q2,...,qn) AMП б) q3 Программный регулятор Компенсатор UП QД П МС q . q,q Рис. 8.11. Схема манипулятора с программным регулятором: МС — механическая система манипулятора; П — приводы Аналитический синтез оператора Ар с получением общего решения поставленной задачи практически невозможен вследствие сложности объекта управления — манипулятора (многомерность, взаимосвязанность, нестационарность, нелинейность, гибкость). Поэтому в подобных случаях приходится прибегать к многошаговой итеративной процедуре: вначале упрощать объект до такой степени, чтобы по- Непрерывное программное управление роботами 149 лучить возможность аналитического синтеза алгоритма управления им, а затем, уже в порядке более простой и однозначной процедуры анализа, рассматривать влияние на полученное решение отдельных ранее неучтенных факторов и соответственно корректировать это решение. В порядке упрощения задачи на первом этапе достаточно пренебречь взаимовлиянием приводов. Тогда система распадается на автономные приводы, алгоритмы управления которыми были рассмотрены в разд. 8.2 и 8.3. Напомним полученные там результаты решения: типовой алгоритм управления по Δqi с обратной связью по qi , дополняемый при необходимости обратными связями для подавления упругих колебаний, контуром подстройки в случае существенной нестационарности параметров манипулятора, последовательной коррекцией и релейной приставкой, подключаемой при больших Δqi; алгоритмы робастного управления с обратной связью по ускорению или релей- ной. Если затем в системе таких автономных приводов учесть их взаимовлияния, это потребует введения соответствующих перекрестных связей между приводами, корректирующих эти влияния путем компенсации прежде всего вредных для качества управления манипулятором взаимовлияний. В случае применения робастных алгоритмов управления приводами их взаимовлияние устраняется, поэтому дополнительных мер на общесистемном уровне здесь не требуется. Однако, как ранее было отмечено, такое развязывание приводов достигается за счет предельного их форсирования. Поэтому в целом выбор алгоритмов управления отдельными приводами должен определяться конкретными техническими требованиями к системе управления манипулятора. В частности, чем слабее требования по быстродействию, тем более динамически слабое и, соответственно, более простое в реализации управление целесообразно выбирать, вплоть до кинематического управления и программирования без динамической коррекции (см. разд. 8.1). Если описанные здесь способы совместного управления приводами манипулятора с помощью общесистемного программного регулятора дополнить возможностями последовательной общесистемной коррекции с помощью компенсатора, получится полный арсенал алгоритмов и структур двухуровневого непрерывного управления манипулятором, что и показано на рис. 8.11, б. Рассмотрим такое совместное применение программного регулятора и компенсатора. Соответствующая схема, полученная добавлением к схеме компенсатора, показанной на рис. 8.8, программного ПД-регулятора, приведена на рис. 8.12. Ее описание имеет вид: A ( q ) p 2 q + b ( pq, q ) + c ( q ) = Qд − Qв ⎫⎪ ⎬. Qд = Aп Aк Aр = A ( q ) ⎡⎣ p 2 qз + ( k ′p + k ) Δq ⎤⎦ + b ( pq, q ) + c ( q ) ⎪ ⎭ (8.8) 150 Глава 8 Рис. 8.12. Схема манипулятора с программным регулятором и компенсатором Здесь Ап, Ак и Ар — операторы соответственно приводов, компенсатора и ПДрегулятора. Исключив Qд, получаем уравнение системы при идеальном компенсаторе для приращений q: (p 2 + k ′p + k ) Δq = − A−1 ( q ) Qв . (8.9) Здесь k ′ и k — диагональные матрицы коэффициентов настройки ПД-регулятора. Таким образом, система управления распадается на n автономных систем приводов. Выбором значений коэффициентов k ′ и k может быть обеспечена как устойчивость, так и желаемое качество переходных процессов и точность удержания рабочего органа на программной траектории. В частности, при выбранном алгоритме регулятора будет иметь место статическая ошибка: ΔQвi ΔqiСТ = . ki Для ее устранения можно перейти к ПИД-регулятору, введя интегрирующее звено. В качестве примера реализации схемы, показанной на рис. 8.12, вернемся к схеме управления трехзвенным манипулятором с компенсатором (см. рис. 8.9). Для того чтобы ввести в нее программный регулятор, надо добавить на вход каждого из трех 2 каналов после звена р сигнал ( ki′ p + ki ) Δqi , где Δqi = qi – qiз, qi — это ϕ, z и r. В результате получаются три канала управления приводов ϕ, z и r, связанные друг с другом перекрестными связями, компенсирующими их взаимовлияние и нестабильность механической системы манипулятора. Если компенсация в схеме, показанной на рис. 8.12, неполная, уравнение системы управления уже не будет таким простым, как (8.9). В частности, могут появиться Непрерывное программное управление роботами 151 взаимовлияния и нестабильность. Это выразится в том, что при синтезе алгоритма программного регулятора матрицы коэффициентов его настройки станут недиагональными и переменными, т. е. может потребоваться подстройка. Таким образом, упрощение компенсатора ведет к усложнению программного регулятора. Оптимальная структура всей системы управления, как отмечалось ранее, соответствует минимальной ее сложности при обеспечении требуемого качества управления манипулятором в целом. 8.5. Системы управления манипулятором совместно по положению и силе Ранее уже были рассмотрены системы программного позиционного управления манипуляторами, т. е. перемещением их рабочих органов. Однако робот должен работать, т. е., наряду с перемещением, развивать силовое воздействие на объекты внешней среды. Соответствующее управление называется позиционно-силовым и имеет следующие варианты: может осуществляться на уровне абсолютных координат рабочего органа мани- пулятора, т. е. по xp и Qp , или по относительным координатам на приводном уровне, т. е. по q и QД ; может осуществляться по одним и тем же координатам или по разным: по одним позиционное управление, а по другим — силовое; может быть независимым или связанным, когда перемещения и усиления функ- ционально зависимы. Очевидно, что независимое позиционно-силовое управление возможно только по разным координатам, а связанное может быть как по разным координатам, так и по одной и той же координате. Рассмотрим возможные комбинации указанных вариантов позиционно-силового управления манипуляторами роботов. 8.5.1. Позиционно-силовое управление по абсолютным степеням подвижности рабочего органа, т. е. по xp и Qp 1. Независимое управление составляющими векторов xp и Qp по разным степеням подвижности. Простейший пример такого управления — силовая обработка плоскости рабочим инструментом манипулятора с прямоугольной системой координат, когда обрабатываемая поверхность лежит в плоскости двух координат этой системы. Силовое воздействие осуществляется по координате, перпендикулярной обрабатываемой плоскости, а по остальным координатам осуществляется сканирование этой поверхности путем позиционного управления. 2. Связанное управление по положению и силе по разным степеням подвижности в виде следующих двух вариантов: • позиционное управление по отдельной координате или по нескольким, образующим вектор, при наличии их функциональной зависимости от силы или 152 Глава 8 вектора силы по другим степеням подвижности. Примером может служить описанная ранее силовая обработка поверхности, но с изменением скорости сканирования в зависимости от величины силового воздействия на эту поверхность; • такое же связанное управление, но с обратной зависимостью силы от положения по разным степеням подвижности. Если при той же силовой операции силовое воздействие не задается постоянным, а должно изменяться по определенному закону по ходу перемещения по поверхности, то это будет примером связанного позиционно-силового управления, когда сила задается как функция координат рабочего органа. Так же связанное позиционно-силовое управление будет и в случае такой силовой обработки не плоскости, а поверхности произвольной формы, даже если сила должна поддерживаться постоянной. 3. Связанное позиционно-силовое управление по одним и тем же степеням подвижности рабочего органа манипулятора в двух вариантах: • управление перемещением с наложением функциональной зависимости от развиваемого усилия; • управление усилием с наложением зависимости от перемещения. В первом варианте в систему позиционного управления вводится обратная связь по силе (моменту), которая создает эффект, эквивалентный изменению податливости механической конструкции по этой степени подвижности. Положительная обратная связь уменьшает эту податливость, компенсируя упругие деформации в этом механизме, а отрицательная, наоборот, увеличивает податливость. Податливость часто специально вводится для облегчения выполнения отдельных технологических операций — например, механической сборки, абразивной обработки и т. п. Создание такой податливости за счет управления приводами имеет определенные преимущества перед конструктивной ее реализацией (подпруживанием механизма передачи). Во-первых, это решение не требует усложнения конструкции механизма, а, во-вторых, появляется возможность программно изменять величину податливости в соответствии с особенностями подлежащей выполнению операции. Такое позиционно-силовое управление получило название управления импедансом (сопротивлением). Обратная связь по силе в рабочем органе манипулятора Qp реализуется через управление приводами решением обратной задачи динамики для составляющих этого усилия, обязанных приводам отдельных степеней подвижности и осуществления обратных связей по ним в этих приводах. Во втором указанном ранее варианте связанного управления задаваемое усилие воздействия на объект внешней среды корректируется в функции от происходящего при этом перемещения. Рассмотренное позиционно-силовое управление может быть статическим (статизм перемещения по силе и наоборот) или динамическим, реализуемым алгоритмами типа ПИД. Динамическое позиционно-силовое управление позволяет учесть свой- Непрерывное программное управление роботами 153 ства объектов внешней среды, с которыми взаимодействует манипулятор, их динамические свойства, жесткость и т. д., и тем самым повысить качество управления этим взаимодействием. 8.5.2. Позиционно-силовое управление по относительным степеням подвижности, т. е. по q и Qд В этом случае возможны все перечисленные ранее варианты позиционно-силового управления. Например, в позиционных электрических приводах постоянного тока широкое применение нашла обратная связь по току в якоре двигателя для изменения жесткости механической характеристики — статической зависимости частоты вращения от движущего момента на валу. 8.5.3. Комбинированное позиционно-силовое управление по абсолютным и относительным степеням подвижности Наряду с приведенными ранее вариантами позиционно-силового управления манипулятором возможны варианты такого управления, когда одновременно используются и абсолютные, и относительные переменные. Например, при программном позиционно-силовом управлении по абсолютным координатам для того, чтобы освободиться от необходимости измерять абсолютные координаты рабочего органа xp , на основе решения обратной кинематической задачи манипулятора переходят от xpз к относительным координатам qз = f −1 ( xpз ). В результате получается комбинированная система позиционно-силового управления по q и Qp . Рассмотрим примеры систем позиционно-силового управления, реализующих перечисленные варианты такого управления манипулятором. Ранее уже были приведены некоторые примеры технологических операций, требующих такого управления. К ним также относятся и различные механические сборочно-монтажные операции, резание, открывание замка ключом или двери поворотом ручки, взятие и удержание хрупких предметов. На рис. 8.13 показана система непрерывного программного управления xpз (t ) с динамической коррекцией в виде обратной связи по усилению в рабочем органе. Здесь использована эталонная модель второго порядка, к которой под действием обратной связи подстраивается манипулятор. На рис. 8.14 приведена схема системы непосредственного управления силой в рабочем органе. Фактическая сила здесь не измеряется, а обратная связь по ней формируется тоже с помощью эталонной модели второго порядка, описываемой уравнением: Aэ xp = Qpэ − Qp . (8.10) 154 Глава 8 ДУр Qp Qpз q, q, Q p T Манипулятор J (q) xp AЭ k xp xp k x pз x pз f(q) ДП J(q) ДС xpз Рис. 8.13. Схема системы программного непрерывного управления по абсолютным координатам рабочего органа манипулятора с обратной связью по усилению: ДУp — датчик усилия в рабочем органе Qpз T – J (q) QПЗ Манипулятор Qp .. АЭ xp р2 xp x p ,Q p ДУр ДПр Рис. 8.14. Схема системы программного управления силой в рабочем органе: ДПр — датчик положения рабочего органа; ДУр — датчик усилия в рабочем органе Здесь: Aэ — диагональная матрица инерции; Qpэ — вектор усилий приводов эталонной модели; Qp — вектор внешних сил. Измерение и учет этих внешних сил, действующих на рабочий орган, позволяет отстраиваться от них при управлении усилием, развиваемым рабочим органом. Управление осуществляется по рассогласованию: ΔQp = Qpэ − Qpз или с учетом (8.10): ΔQp = ( Aэ xp + Qp ) − Qpз . (8.11) Непрерывное программное управление роботами 155 В этом уравнении первый член — усилие в рабочем органе манипулятора, соответствующее эталонной модели. Таким образом, здесь использована динамическая коррекция в виде обратной связи по усилению. Как и близкая ей обратная связь по ускорению, такая коррекция развязывает приводы, делая их автономными, и парирует все внутренние нестабильности и параметрические возмущения. Схема, приведенная на рис. 8.14, с такой коррекцией может применяться для управления не только по вектору силы Qp , но и по вектору положения рабочего органа xp . Показанный на схеме способ получения xp путем двойного дифференцирования сигнала датчика положения xp может быть заменен на датчик вектора скорости xp с однократным дифференцированием или прямым изменением вектора ускорения (например, с помощью акселерометра). На рис. 8.15 приведена схема системы одновременного независимого управления рабочим органом манипулятора по перемещению и по силе по разным степеням подвижности. Рис. 8.15. Схема системы независимого управления перемещением и усилением в рабочем органе манипулятора: ДПр, ДСр — датчики положения и скорости рабочего органа; ДУр — датчик усилия в рабочем органе Соответственно, в схеме имеются два контура управления с обратной связью по положению и по силе. Кроме того, в ней присутствуют две внутренние обратные связи по скорости и по силе. Здесь: S — диагональная матрица селективности с элементами 1, соответствующими управлению по силе, и 0 — по положению. Эта матрица таким образом определяет координаты рабочего органа, по которым осуществляется управление по одному из этих двух способов; K ΔQ и K Δx — диагональные матрицы коэффициентов настройки каналов управления по Qp и xp , a K Q и K v — аналогичные матрицы коэффициентов при Qp и xp . Контур обратной связи по рассогласованию по силе замыкается только после появления контакта с внешней средой с помощью специального датчика (на схеме не показан). 156 Глава 8 На рис. 8.16 приведена схема системы связанного управления по положению и силе, в которой задание xpз корректируется по текущему значению Qp . При движении рабочего органа манипулятора до соприкосновения с объектом внешней среды, с которым он должен взаимодействовать, сигнал с датчика силы не поступает в схему, как и в предыдущей системе. После достижения контакта, который фиксируется специальным датчиком, эта цепь включается. В результате при дальнейшем движении рабочего органа величина его хода корректируется по силе воздействия на внешнюю среду. В системе имеется еще канал программного управления скоростью xpз тоже с коррекцией по силе. Рис. 8.16. Система связанного управления перемещением и усилием в рабочем органе манипулятора Силовое очувствление манипуляторов осуществляется с помощью датчиков силы и момента. Кроме того, информацию о силах взаимодействия рабочего органа манипулятора с объектами внешней среды можно получить с помощью наблюдателейвычислителей силы по математической модели манипулятора с использованием в ней значений измеряемых перемещений и скоростей его степеней подвижности. На рис. 8.17, a приведена схема присоединения такого наблюдателя к манипулятору, а на рис. 8.17, б — схема наблюдателя, соответствующая уравнению манипулятора (5.19). Согласно этому уравнению, оценка искомой силы: Qˆ внеш = ( J T (q ))−1 ⎡⎣QД − A(q )q − b(q, q) − c(q) ⎤⎦ . Существенно более простая схема наблюдателя получается, если исключить из математической модели приводы, введя значения усилий на их выходе путем их измерения с помощью соответствующих датчиков. Наблюдатели силы много проще и дешевле датчиков силы, имеют больший диапазон оценки силы и, к тому же, не требуют внедрения в конструкцию манипуляторов. Однако они примерно вдвое уступают датчикам по точности и быстродействию. Поэтому перспективным является совместное применение обоих способов силового очувствления [13]. Непрерывное программное управление роботами а) б) Рис. 8.17. Наблюдатель силы на основе математической модели манипулятора с системой приводов: а — схема соединения наблюдателя с манипулятором; б — структурная схема наблюдателя 157 158 Глава 8 ГЛАВА 9 АДАПТИВНОЕ И ИНТЕЛЛЕКТУАЛЬНОЕ УПРАВЛЕНИЕ РОБОТАМИ 9.1. Функциональная схема системы сенсорного (очувствленного) управления роботов На рис. 9.1 показана общая функциональная схема системы управления движением исполнительных систем робота с использованием сенсорной информации о внешней среде. Ранее в разд. 3.5 были рассмотрены сенсорные системы, применяемые в робототехнике. Основные сенсорные системы — это системы технического зрения и близкие им локационные системы (радиотехнические, лазерные, ультразвуковые), системы силомоментные и тактильные. Все они обеспечивают для управления движением робота общую обратную связь по xp и Qp, а также информацию о различных параметрах внешней среды, которая необходима для выполнения роботом конкретных технологических операций. Схема на рис. 9.1 включает пять уровней управления: первый, нижний, уровень — это управление отдельными степенями подвиж- ности, т. е. приводами; второй — совместное программное управление приводами степеней подвиж- ности; третий — тоже совместное, но адаптивное управление приводами; четвертый — синтез плана выполнения действий; пятый, верхний — уровень обработки сенсорной информации и синтеза с ее по- мощью моделей внешней среды, самого робота, а также программ выполнения им типовых операций. Каждый из перечисленных уровней, в свою очередь, может содержать внутренние подуровни. Функции человека-оператора в этой системе управления заключаются в следующем: выдача заданий на выполнение определенных операций, оказание в диалоговом 160 Глава 9 Рис. 9.1. Функциональная схема системы управления очувствленного робота Адаптивное и интеллектуальное управление роботами 161 режиме помощи в выполнении отдельными уровнями своих функций и контроль за ними, а также оперативное взятие на себя при необходимости функций любого уровня вплоть до управления отдельными приводами. Это может потребоваться, когда роботу не удается выполнить какую-то сложную операцию либо в аварийных ситуациях. Выдача человеком-оператором заданий может осуществляться в различной форме — в зависимости от того, какие уровни при этом задействованы. Когда подлежащая выполнению операция может быть реализована на основе рассмотренного в предыдущих главах программного управления, оператор выдает соответствующую управляющую программу на уровень программного управления. Если в ходе выполнения задания необходимо использовать сенсорную информацию, соответствующие указания поступают на вышерасположенные уровни управления. Из показанных на схеме пяти уровней в реальном времени участвуют в управлении движением три нижних, а также уровень обработки сенсорной информации. Информация о модели среды может изменяться в ходе выполнения операции при существенном изменении соответствующей сенсорной информации. Приведенная на рис. 9.1 функциональная схема очувствленного робота очень близка аналогичной схеме управления движениями человека (см. рис. 2.8). Это совершенно естественно, поскольку человек является прототипом и образцом при создании роботов. 9.2. Системы адаптивного управления Рассмотренные ранее системы программного управления реализуют простейший способ управления, когда априорно достаточно точно известно все о внешней среде и самом роботе, что позволяет заранее спланировать и запрограммировать работу робота. Иными словами, такое управление предполагает полностью детерминированные внешние и внутренние условия. Однако, разумеется, подобная ситуация имеет место далеко не всегда. Рассмотрим несколько типовых примеров: операция взятия произвольно расположенного или перемещающегося объекта — для ее выполнения необходимо автоматическое наведение схвата манипулятора на объект; навинчивание гайки на болт — для этого требуется предварительно «наживить» гайку на резьбу; вставление стержня в отверстие с точностью, которая превышает точность пози- ционирования при программном управлении и поэтому требует пробных поисковых движений; дуговая сварка швов, положение которых может варьироваться, — требуется вести сварочную головку строго по шву и с определенной угловой ориентацией; движение в заранее неизвестном пространстве с обходом или преодолением не- предвиденных препятствий и т. п. 162 Глава 9 Для выполнения подобных операций необходимо оперативно получать информацию о среде непосредственно в ходе их выполнения для использования ее в реальном времени при управлении движением. Такое управление в функции от текущей информации о внешней среде называется адаптивным. Необходимым условием его реализации является наличие сенсорных систем, дающих эту информацию, т. е. «очувствление» робота. Адаптация расширяет функциональные возможности робота, поскольку позволяет выполнять задачи, не решаемые программно, и упрощает его эксплуатацию, не требуя точного знания модели внешней среды и самого робота. Адаптивное управление применяется в следующих вариантах: определение значений заранее неизвестных параметров для ввода их в управ- ляющую программу системы. Здесь адаптивное управление является надстройкой над системой программного управления, осуществляя ее самонастройку, — это параметрическая адаптация системы программного управления; выбор управляющей программы из готового набора программ или сборка ее из набора типовых подпрограмм, в том числе и в ходе выполнения операции, на основе оценки текущей ситуации по сенсорной информации. Здесь адаптивное управление тоже дополняет систему программного управления; изменение (переключение) структуры системы управления, т. е. ее алгоритма, на основе оценки текущей обстановки. Например, изменение способа коррекции в системе программного управления или переход от одной сенсорной системы к другой в системе адаптивного управления. Последние два варианта — это структурная адаптация системы программного управления (самоорганизация системы); беспрограммное управление движением в реальном времени только по сенсор- ной информации. Например, выполнение операции наведения рабочего органа манипулятора на произвольно расположенный объект. Таким образом, адаптивное управление может осуществляться как через систему программного управления, так и путем непосредственного воздействия на приводы. Оба эти варианта отображены на схеме, приведенной на рис. 9.1, стрелками с уровня адаптивного управления. При выполнении конкретных технологических операций адаптивное управление чаще всего применяется именно в комбинации с программным, обеспечивая изменение параметров или структуры программного управления или, наконец, замену его, когда необходимо полностью переходить на управление по текущей сенсорной информации. Кроме того, возможна комбинация указанных способов адаптации, последовательно сменяющих друг друга во времени, или их иерархия в виде нескольких уровней адаптации («адаптация адаптации»). Например, над уровнем параметрической адаптации, осуществляющим подстройку системы программного управления, может находиться уровень структурной адаптации, осуществляющий дискретное изменение в схеме программного управления по мере исчерпания возможности подстройки. Адаптивное и интеллектуальное управление роботами 163 9.2.1. Адаптивное управление отдельным приводом Принцип адаптивного управления может применяться не только для совместного управления приводов манипулятора или средства передвижения робота, как показано на рис. 9.1, но и в системе управления отдельного привода. Разумеется, в этом случае системы управления робота в целом и его исполнительных устройств не становятся адаптивными, оставаясь системами программного управления, т. к. адаптация при этом относится не к общесистемной, а к локальной задаче. Такая адаптация называется внутренней — в отличие от внешней, осуществляемой с помощью общесистемной сенсорной обратной связи. Ранее, в разд. 7.2 (см. рис. 7.5 и 7.6) и в разд. 8.2.2, уже были представлены некоторые схемы программного управления отдельными приводами с адаптивной подстройкой. Мы рассмотрели тогда два способа адаптивного управления приводами: с эталонной моделью с управлением в функции от рассогласования объекта и модели (см. разд. 7.5) и с оценкой непосредственно качества управления. 9.2.2. Адаптивное управление манипулятором В системах совместного управления приводами манипулятора применяются те же способы адаптации, что и при управлении отдельными приводами. На рис. 9.2 показана схема системы адаптивного управления манипулятором, представляющая собой конкретизацию той части общей схемы сенсорного управления (см. рис. 9.1), которая реализует такое управление манипулятором. Схема охватывает три уже упоминавшихся варианта адаптивного управления: 1. В функции от оцениваемого качества управления с его стабилизацией или оптимизацией. 2. По отклонению от эталонной модели. 3. В функции от получаемой от сенсорных систем текущей информации об объектах внешней среды или координатах рабочего органа манипулятора относительно этих объектов. Остановимся на третьем варианте адаптивного управления движением, поскольку оно характерно именно для внешней адаптации и ранее не рассматривалось. Далее приведены примеры алгоритмов такого управления для выполнения типовых операций поиска и взятия произвольно расположенных предметов (рис. 9.3) и вставления стержня в отверстие (рис. 9.4). Для выполнения указанных операций схват должен быть оснащен сенсорами в виде дальномеров, расположенных на его пальцах, и датчиком наличия предмета между пальцами. На рис. 9.3 приведена структурная схема алгоритма взятия манипулятором предмета, произвольно расположенного на плоскости в рабочей зоне. После вывода схвата по программе в зону предполагаемого нахождения предмета производится сканирование схватом рабочей плоскости (например, строчное сканирова- 164 Глава 9 От внешней среды Сенсорные системы 4-й уровень Обработка сенсорной информации Оценка качества управления 3-й уровень Идентификация параметров манипулятора (БОК) (БИ) Адаптивное управление Программное управление 2-й уровень 1-й уровень Приводы На механическую систему Рис. 9.2. Схема системы адаптивного управления манипулятором ние в квадрате с центром в точке вывода). Схват при этом ориентируется торцами пальцев перпендикулярно рабочей плоскости. При обнаружении сенсорами предмета схват останавливается над ним и ориентируется так, чтобы его пальцы находились симметрично относительно середины предмета с двух сторон от его наиболее узкой части. После этого схват опускается, и по сигналу датчика наличия предмета между пальцами пальцы схвата сводятся, захватывая предмет. В случае неудачи манипулятор останавливается и сигнал об этом поступает на пульт оператора. Однако обычно до этого производится повторение операции. На рис. 9.4 упрощенно показан один из алгоритмов выполнения типовой сборочной операции вставления стержня в отверстие. Здесь применяются сенсоры, выявляющие относительное положение сопрягаемых деталей и усилие сопряжения. Адаптивное и интеллектуальное управление роботами 165 Перемещение схвата в зону поиска Формирование зоны поиска Перемещение схвата по линии развертки поиска Да Перемещение схвата в сторону первого сработавшего сенсора Да Деталь между пальцами? Опускание схвата Да Движение по линии закончено? Да Да Поворот схвата на 90о Деталь в схвате? Закрывание схвата Нет Нет Предмет обнаружен? Сканирование зоны закончено? Нет Формирование новой линии развертки поиска Нет Обращение к оператору Конец Рис. 9.3. Структурная схема алгоритма поиска и взятия предмета Нет 166 Глава 9 Перемещение стержня к месту соединения Да Есть контакт деталей? Нет Уменьшение угла между осями деталей Перемещение стержня по оси вперед Да Сопротивление сопряжению больше допустимого? Изменение ориентации схвата Да Нет Сопряжение закончено? Нет Конец Рис. 9.4. Структурная схема алгоритма соединения типа «вал-втулка» Операция выполняется по методу направленного ориентирования и заключается в перемещении стержня, зажатого в схвате манипулятора, относительно отверстия до совпадения их осей настолько, чтобы стало возможным вставление стержня в отверстие. После этого осуществляется последнее движение. 9.3. Системы интеллектуального управления Интеллектуальное управление — высшая форма управления в теории автоматического управления после адаптивного. Возникло оно в рамках адаптивного управления привлечением методов искусственного интеллекта для решения все более сложных задач, а затем выделилось в отдельный способ управления. Оно основано на применении методов искусственного интеллекта (отсюда само название этого способа управления). Адаптивное и интеллектуальное управление роботами 167 Термин «искусственный (технический) интеллект» метафоричен и означает, что обладающая им техническая система способна выполнять функции, которые, если бы их выполнял человек, считались бы интеллектуальными, т. е. требовали бы от человека приложения его естественного интеллекта. При этом искусственный интеллект имитирует естественный только в узко специальном (профессиональном) отношении и никаких более широких аналогий с естественным интеллектом не имеет. Естественный интеллект человека неизмеримо многограннее и шире, охватывая, помимо профессиональной, все другие сферы человеческой деятельности, включая социальную, а также эмоциональность и принципиально иную мотивацию, свойственную только человеку. Современные методы искусственного интеллекта можно объединить в две группы: методы, основанные на математической логике, и эвристические методы, заимствованные из особенностей мышления человека и основанные на технических нейронных структурах. Основная область применения интеллектуального управления — это, прежде всего, сложные объекты и большие системы, для которых доступно описание только на семиотическом уровне. Вместе с тем, интеллектуальное управление часто требуется и для достаточно простых объектов, если с их помощью решаются интеллектуальные задачи, или если сама задача управления ими требует интеллектуального подхода, например, в силу сложности внешних условий. В робототехнике искусственный интеллект используется прежде всего для решения следующих задач: обработка сенсорной информации; формирование моделей внешней среды; оценка текущей ситуации, принятие адекватных решений и планирование пове- дения; управление движением; создание интеллектуального интерфейса для человека-оператора. Уровень искусственного интеллекта связан, прежде всего, с развитием иерархической структуры модели среды при формировании все более обобщенных уровней ее представления путем перехода от образов внешней среды, непосредственно воспринимаемых сенсорами системы, ко все более обобщенным абстрактным образам и понятиям. Следствие этого — расширение функциональных возможностей робота благодаря автономному решению все более сложных интеллектуальных задач, включая самоусовершенствование в процессе активного взаимодействия с внешней средой при решении этих задач. Одним из наиболее обобщенных типов моделей среды являются логико-лингвистические модели. Они применяются для сложных объектов с неоднозначной реакцией на одни и те же ситуации, которые не могут быть описаны формально математически и поэтому описываются эвристически на основе экспертных оценок на языке, близком к естественному. 168 Глава 9 Методы искусственного интеллекта применяют в системах управления не только в общесистемных контурах управления, но и для решения различных локальных задач отдельных систем робота. В этом случае процесс управления роботом, естественно, не становится интеллектуальным, — подобно тому, как в системах управления наличие внутренней адаптации в отдельных частях системы не делает систему в целом адаптивной. На рис. 9.5 показана обобщенная схема системы интеллектуального управления робота, которая представляет собой конкретизацию общей схемы управления очувствленного робота (см. рис. 9.1) в части применения искусственного интеллекта при решении упомянутых ранее задач [14]. Рис. 9.5. Схема системы интеллектуального управления робота В центре схемы находится блок памяти, двусторонне связанный с другими блоками, перерабатывающими информацию. Объем и уровень организации памяти — главный показатель интеллектуального потенциала робота. В блок памяти входят база знаний о внешней среде — основа интеллекта и база данных как о внешней среде, так и о самом роботе и об операциях, которые он может выполнять. Кроме того, специализированные оперативные базы знаний и данных, связанные с этой центральной памятью, могут иметься и в отдельных блоках робота. База знаний о внешней среде содержит как априорную информацию, вводимую до начала работы, так и оперативную сенсорную, которая приобретается в процессе Адаптивное и интеллектуальное управление роботами 169 восприятия окружающей среды при выполнении роботом заданных действий, а также в процессе его специальных познавательных действий, направленных на изучение этой среды. Эта информация включает в себя описание геометрических и других физических характеристик объектов среды и их взаимосвязь. Такое описание, как отмечалось, имеет иерархическую структуру. Например, описание рабочей зоны манипулятора включает планы всей зоны и ее частей, различающихся как масштабом и, соответственно, точностью, так и степенью обобщения первичной сенсорной информации (выделение линий, контуров, поверхностей, целых объектов). Введение в эти планы времени в качестве параметра дает картину внешней среды в динамике с учетом взаимодействия ее объектов друг с другом и с роботом. База знаний о внешней среде содержит также правила, позволяющие моделировать возможные изменения этой среды. Сами знания представляются в виде логических и сетевых моделей среды. Логические модели основаны на аппарате математической логики и, прежде всего, на исчислении предикатов. Модели строятся из системы базовых элементов и системы правил и аксиом. В сетевых моделях вершины сети соответствуют объектам среды, а дуги — отношениям между ними. Применяются сети фреймов, описывающих объекты среды, и семантические сети. Все другие блоки схемы также имеют иерархическую структуру. Их уровни соединены друг с другом по вертикали. В свою очередь, показанные на схеме соединения блоков осуществляются многоканально между одноименными уровнями по горизонтали. Блок обработки сенсорной информации получает из блока памяти экстраполяцию изменения состояния внешней среды, а передает в него очередную коррекцию этого состояния на уровнях сенсорной картины среды. Так, в блоке обработки сенсорной информации имеются параллельные каналы по обработке различного типа сенсорной информации, в которых снизу вверх передается информация по уровням со все большим обобщением. Например, в канале технического зрения это обобщение, начиная с исходной картины внешней среды, завершается переходом от образной информации к вербальным понятиям. Аналогичные уровни других блоков соединены по горизонтали, образуя иерархию контуров управления движением, — от типа рефлексов до реализации различной сложности технологических операций. Блок оценки ситуации и принятия решений, а также блок планирования поведения получают из блока памяти текущую модель внешней среды, а передают в него ее оценку по определенным критериям и синтезированный план управления движением робота. Главные задачи этих блоков — принятие решений, адекватных оценке текущей ситуации, и последующий синтез плана их реализации. При синтезе этого плана применяются различные приемы решения задач, разработанные в теории искусственного интеллекта. В задачу блока оценки ситуации и принятия решений входит также оперативная корректировка целей управления и их приоритетов, — это верхний интеллектуальный уровень в иерархии управления роботом. 170 Глава 9 Блок интеллектуального интерфейса в общем случае должен быть двусторонне связан со всеми упомянутыми функциональными блоками, что для простоты не показано на рис. 9.5. Обратим внимание на следующую особенность рассмотренной схемы системы интеллектуального управления (как и общей схемы, приведенной на рис. 9.1) — в них отсутствует в явном виде блок, ответственный за реализацию способа интеллектуального управления, как это имеет место для адаптивного и программного управления. Объясняется это тем, что искусственный интеллект распределен по всем функциональным блокам схемы в соответствии с упомянутыми ранее функциями, при реализации которых он может требоваться. В конкретных системах он может присутствовать в любом из этих блоков. Именно поэтому наряду с термином «системы интеллектуального управления» существует более общий термин «интеллектуальные системы управления». Рассмотрим применение названных ранее методов искусственного интеллекта в системах управления роботов. 9.3.1. Управление на основе экспертных систем Типовая структура экспертной системы управления приводов манипулятора приведена на рис. 9.6. Рис. 9.6. Структура экспертной системы управления Адаптивное и интеллектуальное управление роботами 171 База знаний содержит сведения о кинематике и динамике манипулятора. База данных включает информацию о текущем состоянии системы управления и цели управления, а база алгоритмов — алгоритмы обработки данных, идентификации и управления. Блок правил логического вывода с помощью языка исчисления предикатов формирует экспертное заключение об оптимальной текущей структуре и настройке системы приводов, которая затем реализуется в системе управления. На рис. 9.7 приведен пример системы управления манипулятором по заданным абсолютным координатам его рабочего органа с экспертной системой настройки с помощью обучающейся базы данных [13]. Рис. 9.7. Схема системы управления манипулятором с самообучающейся экспертной системой настройки: БП — блок программирования; БН — блок настройки; БОК — блок оценки качества; П — система приводов; МС — механическая система манипулятора Блок оценки качества (БОК) выявляет отклонения выбранного показателя качества для каждого привода по их выходным переменным. Это осуществляется экспертной системой. Блок настройки (БН) приводов так же построен на базе знаний, содержащей рекомендации экспертов. По мере накопления опыта в ходе эксплуатации системы содержание базы знаний пополняется, т. е. происходит совершенствование системы. Системы управления, основанные на экспертных системах, соответствуют понятию ситуационного (семиотического) управления, когда в них при принятии решения используется эта методика. Ситуационное управление представляет собой самостоятельное направление в теории интеллектуальных систем управления. Его основная область применения — большие автоматизированные комплексы, включающие человеческий персонал. Основная идея ситуационного управления состоит в предварительном группировании потенциально возможных ситуаций (состояний объекта управления) в классы, каждому из которых соответствует определенное решение по управлению (по воздействиям на этот объект), наиболее целесообразное с точки зрения заданных критериев качества управления (качества функционирования объекта управления). В результате задача блока оценки ситуации и принятия решения в схеме, показанной на рис. 9.5, сводится к отнесению очередной ситуации к одному из этих классов. В целом этот блок содержит следующие компоненты: анализатор ситуации, который определяет, когда требуется воздействие на объект; 172 Глава 9 классификатор, который на основании получаемой от анализатора описания текущей ситуации, осуществляет ее классификацию, относя к одному из классов ситуаций, каждому из которых соответствует определенное управляющее воздействие на объект; коррелятор, который по полученной от классификатора информации о классе текущей ситуации выбирает из базы управляющих воздействий воздействие, соответствующее этому классу; экстраполятор, который включается, если предложено несколько решений, и выбирает наилучшее из них; блок случайного выбора, который включается в противоположном случае, т. е. когда решение не найдено, и вырабатывает не слишком сильное воздействие на объект, чтобы как-то изменить ситуацию, сделав ее более определенной. До начала работы системы ситуационного управления необходим этап ее обучения, когда с помощью экспертов формируется база знаний в виде набора классов ситуаций и соответствующих им решений в виде реакций на ситуации каждого класса. С помощью экспертов формируется так же и процедура экстраполяции. Таким образом, системы ситуационного управления замыкаются обратной связью не по выходным переменным объекта управления, а по ситуации. Сами эти переменные, как и внешние воздействия, конечно, измеряются, но используются они, чтобы с помощью модели объекта определить его состояние, т. е. оценить ситуацию. По ее отклонению от заданной и осуществляется, как указано, управляющее воздействие на объект. Используемые в этих системах модели объекта управления — это семиотические модели (отсюда и второе название этого способа управления). Семиотическая модель представляет собой таблицу упомянутых ранее соответствий «ситуация — решение». Такое наиболее обобщенное описание объекта управления и в целом логико-семиотическая модель вывода решений воспроизводит процесс формирования в сознании человека моделей объектов внешней среды при их изучении и выработке поведенческих реакций на внешние ситуации. В ситуационных системах управления, помимо метода экспертных систем, широко используются и другие методы искусственного интеллекта, рассматриваемые далее. 9.3.2. Управление на основе нечеткой логики Основанная на теории нечетких множеств нечеткая логика является развитием математической логики для описания сложных объектов и ситуаций, модели которых не могут быть представлены с помощью классических математических методов вследствие неточности, неопределенности и недостатка информации. Нечеткая логика позволяет формализовать описание процессов и систем при неполном знании о них, т. е. формализовать неопределенности. Пусть, например, для некоторого объекта известны значения выходной переменной только для несколь- Адаптивное и интеллектуальное управление роботами 173 ких значений входного воздействия. Аппарат нечеткой логики позволяет по этим данным описать зависимость «вход-выход» во всем диапазоне возможных значений входного воздействия. Каждому известному значению придается функция принадлежности, которая определяет степень уменьшения доверия к факту принадлежности выходной переменной этому дискретному значению по мере удаления величины входного воздействия от значения, соответствующего этому значению выходной величины. На рис. 9.8 показан пример такого описания зависимости «вход-выход» с помощью четырех простых линейных функций принадлежности (ФП), построенных в относительных единицах. Наибольшее значение каждой из ФП — это известное значение выходной переменной, соответствующее известному значению входной переменной. Значения выходной переменной для других неизвестных значений входной переменной оцениваются по ФП. Рис. 9.8. Пример функций принадлежности (ФП) На рис. 9.9 приведена функциональная схема системы нечеткого пропорциональнодифференцирующего (ПД) управления привода, основанная на нечеткой логике [13]. Здесь Ф1 и Ф2 — фузификаторы (от англ. fuzzy, нечеткий), которые осуществляют преобразование входных переменных e и e в нечеткие переменные Ee и Ee с помощью функций принадлежности для всего диапазона их изменения. Рис. 9.9. Функциональная схема системы нечеткого управления привода: Ф1, Ф2 — фузификаторы; ДФ — дефузификатор; Н-Ц, Ц-Н — аналого-цифровой и цифроаналоговый преобразователи; БОИ — блок обработки информации На рис. 9.10 показаны эти функции для рассогласования по положению e. Здесь имеются три функции принадлежности: П, Н и О, которые соответствуют трем выраженным в относительных единицах дискретным значениям входной переменной: 174 Глава 9 Рис. 9.10. Функции принадлежности рассогласования: П — положительное; Н — нулевое; О — отрицательное положительному +1, нулевому 0 и отрицательному –1. Аналогичная зависимость реализуется и для e в Ф2. В БОИ реализуется ПД алгоритм для нечетких переменных Ee и Ee с получением выходной нечеткой переменной EU . Затем в дефузификаторе (ДФ) осуществляется обратный переход к значениям выходной переменной U . Таким образом, аппарат нечеткой логики дает возможность по нескольким известным точкам характеристики «вход-выход» некоторого звена системы управления синтезировать всю эту характеристику, устранив исходную неопределенность в схеме. Основная трудность синтеза систем нечеткого управления заключается в выборе функций принадлежности. Осуществляется это с помощью экспертных оценок. Нечеткая логика, наряду с самостоятельным использованием в системах нечеткого управления, применяется и в других интеллектуальных методах: экспертных системах, ассоциативной памяти, нейронных сетях, когда имеет место неопределенность, которую нельзя описать с помощью традиционного вероятностного подхода. Дальнейшим развитием логических методов описания динамических систем при недостатке информации о количественном значении их параметров является интервальная логика. Она позволяет описывать системы, о которых известна лишь структура, а информация о параметрах ограничена знанием их предельных значений, т. е. интервалов. 9.3.3. Управление на основе ассоциативной памяти Ассоциативная память получила широкое применение как способ повышения быстроты извлечения информации из памяти. Помимо этого важной особенностью ассоциативной памяти для систем автоматического управления (САУ) являются возможность восстановления целостных образов по их фрагментам, а также проведение классификации ситуаций на качественном уровне и с оперативным принятием соответствующих управленческих решений. В качестве примера на рис. 9.11, а приведена схема системы управления привода на базе ассоциативной памяти [14]. Устройство адаптивной подстройки (УАП) стабилизирует определенный показатель качества управления (колебательность, быстродействие и т. п.), выбирая из заранее введенного в ассоциативную память (АП) набора настроек управляющего устройства привода (УУп) настройку, соответствующую значениям варьируемых параметров нагрузки и самого привода. Настрой- Адаптивное и интеллектуальное управление роботами 175 ка выбирается из ассоциативной памяти в функции от текущего состояния объекта управления, которое определяется в блоке идентификации по информации, поступающей от объекта. Поскольку этой информации может быть недостаточно для осуществления теоретически точной идентификации, здесь применены эвристические алгоритмы идентификации по неполной информации, разработанные с помощью экспертных знаний. Блок оценки качества (БОК) управляет ассоциативной памятью, открывая ее для очередной записи новой информации при определенном изменении показателя качества. а) б) Рис. 9.11. Система управления привода с ассоциативной памятью: БИ — блок идентификации; АП — ассоциативная память; БОИ — блок обработки информации; БН — блок настройки; БОК — блок оценки качества На рис. 9.11, б показан вариант схемы, где блок ассоциативной памяти (АП) введен в основной контур управления и не подстраивает его, а сам выдает управляющие воздействия [14]. Обе схемы должны проходить этап обучения экспертами, во время которого происходит заполнение ассоциативной памяти набором ситуаций и соответствующих им 176 Глава 9 решений в виде настройки первой схемы (см. рис. 9.11, а) или управляющей реакции второй (см. рис. 9.11, б). Приведенные примеры САУ приводов на базе ассоциативной памяти демонстрируют преимущества этого метода искусственного интеллекта в отношении быстродействия и простоты аппаратной реализации по сравнению с типовыми методами адаптивного управления. Наличие и степень интеллектуальности этих систем определяются содержанием и способом заполнения ассоциативной памяти. Например, если эта память заполняется на основе экспертных данных, уровень интеллекта системы будет, естественно, определяться уровнем этих данных. По сравнению с рассмотренными системами управления на базе экспертных систем, системы, использующие ассоциативную память, выгодно отличаются, как уже отмечено ранее, быстродействием — благодаря практически мгновенному формированию ассоциаций с выбором из памяти настроек или управляющих сигналов без процесса сопоставления альтернативных решений и выбора наилучшего. Конечно, это дается ценой неизбежного снижения качества управления по сравнению с полноценной экспертной системой с организацией логического вывода на знаниях изза большей грубости принимаемых решений и, соответственно, большего отклонения их от оптимума. 9.3.4. Управление на основе нейросетевых структур Искусственные нейросетевые структуры — аналог естественных нейронных структур живых организмов. Их основное достоинство — параллельная обработка информации и обучаемость. Именно благодаря этому эти структуры получили широкое распространение в вычислительной технике (нейрокомпьютеры) и в различных системах обработки информации. По тем же причинам на их основе развился новый раздел теории управления — нейроуправление. Элементом искусственных нейронных сетей служит искусственный (формальный) нейрон, являющийся сильно упрощенной моделью естественного нейрона. Это статическое нелинейное звено с одним выходом и несколькими входами, сигналы которых, умноженные на свои весовые коэффициенты, алгебраически суммируются. Статическая характеристика нейрона может быть релейной, линейной с насыщением или с другой нелинейностью. Нейронная сеть из таких элементов — это однородная иерархическая структура обычно из 2–4 слоев нейронов: входного слоя, выходного и промежуточных. Соединение между нейронами разных слоев выполняется прямыми (сеть прямого распространения) и в виде обратных связей (обратное распространение сигнала). Знания формируются в нейронных сетях в процессе их настройки как отображение входов на выходы. На рис. 9.12, а в качестве примера применения нейронной сети в управлении показана структура системы управления приводом на базе таких сетей [14]. Здесь НС-УУ — нейронное устройство управления, а НС-Модель — нейросетевая модель Адаптивное и интеллектуальное управление роботами 177 объекта управления (идентификатор). НС-Модель настраивается на объект по сигналу рассогласования их выходов и формирует обучающую выборку для подстройки НС-УУ в соответствии с принятым критерием качества управления (быстродействие, энергопотребление и т. п.) при изменении параметров объекта и среды. В схеме использованы трехслойные нейронные сети прямого распространения, осуществляющие статическое нелинейное преобразование входного вектора в выходной (рис. 9.12, б). Для обеспечения необходимых динамических свойств НСМодели в нее вводятся внешние обратные связи. Настройка нейронных сетей осуществляется изменением весовых коэффициентов нейронов, в том числе автоматически — методом обратного распространения ошибки. а) б) Рис. 9.12. Система управления приводом на базе нейронных сетей Нейронные сети осуществляют нелинейное преобразование входного вектора в выходной при неизвестном заранее требуемом алгоритме такого преобразования, которое находится в результате настройки. В таком качестве, помимо решения задач управления, нейронные сети находят применение для аппроксимации и экстраполяции функций, выполнения различных нелинейных преобразований, распознавания образов, идентификации. Синтез нейронных сетей заключается в выборе их структуры (топологии) и настройке весовых коэффициентов в процессе обучения и самообучения. Этот процесс основан на оптимизации (минимизации) некоторой функции качества настройки, определяющей отклонение выходного сигнала нейронной сети от требуемого при данном входе. 178 Глава 9 По существу, в стационарных системах, после того как нейронная сеть настроена, можно снять ее характеристику «вход-выход» и реализовать ее на другом, более простом, функциональном преобразователе. Однако искусственные нейронные сети не имеют альтернативы для нестационарных систем управления, где требуется их непрерывная подстройка. Наиболее сложная задача при синтезе нейронных сетей — это их настройка: выбор алгоритмов обучения или самообучения с обеспечением минимума времени настройки. * * * Рассмотренные методы искусственного интеллекта, как отмечено ранее, обычно используются в комбинации, дополняя друг друга. Наряду с алгоритмами управления они применяются и для решения других задач обеспечения функционирования систем. В общем случае интеллектуальные системы как объект исследования и синтеза представляют собой иерархические многомерные нестационарные и нелинейные системы с переменной структурой. Исследования их нижних уровней, которые работают в реальном времени, реализуя динамический процесс управления, выполняются в соответствии с теорией и методами, изложенными в предыдущих разделах книги. Выше расположенные уровни формирования моделей внешней среды, оценки ситуации, принятия решений и планирования исследуются по рассмотренным методам искусственного интеллекта, использующим различные явные и неявные формы представления знаний и языки описания. Дальнейшим развитием рассмотренных методов стало их самосовершенствование путем самообучения, как это происходит в естественном интеллекте. 9.3.5. Понятие об искусственном разуме и разумных роботах Интеллектуальные системы автоматического управления не являются высшей формой, пределом развития теории управления подобно тому, как имитируемый ими естественный интеллект далеко не олицетворяет разум человека. Более того, основанный на вербальных формализованных знаниях интеллект человека, реализуемый левым полушарием головного мозга, составляет менее 20% нашего разума. Основную же его часть составляет образное мышление правого полушария, включающее творческие способности — вершину нашего мышления и личности в целом. Соответственно, дальнейшим этапом развития робототехники должны стать роботы, основанные на искусственном разуме, объединяющем искусственный вербальный интеллект и искусственную образную креативность — творческое мышление [19]. На рис. 9.13 приведена гипотетическая схема системы такого разумного управления. Адаптивное и интеллектуальное управление роботами 179 На этой схеме, наряду с каналом освоенного вербального интеллектуального управления, представлен канал, оперирующий образной информацией. Оба канала действуют согласованно, последовательно и параллельно, подобно взаимодействию полушарий головного мозга человека. Показанные на схеме функциональные блоки имеют несколько уровней, по которым они связаны. Основную трудность реализации этой схемы составляет канал образной информации, изучение и освоение которой находится еще в самом начале. Материальной основной схемы должна стать нейронная структура, но на основе существенно более совершенных искусственных нейронов по сравнению с существующими формальными нейронами [19]. В связи со сложностью таких систем, перспективным способом их синтеза является упомянутые самоорганизация и саморазвитие. Рис. 9.13. Схема системы управления разумного робота 180 Глава 9 В мировой литературе наряду с термином «искусственный интеллект» (Artifical Intellect) существует более общее понятие «искусственный разум» (Artifical Intelligence), охватывающий и первое понятие и креативность, т. е. технический аналог разума человека в целом. Следующим поколением роботов и будет такой разумный робот. 9.4. Особенности управления средствами передвижения роботов Управление передвижением мобильных роботов — это транспортная задача, которая не имеет принципиальной специфики применительно к робототехнике, за исключением шагающего способа передвижения, который, в силу близости педипуляторов («ног») к манипуляторам, традиционно является предметом специального раздела робототехники. По способам и системам управления педипуляторы действительно подобны манипуляторам. Основное отличие систем управления передвижением роботов от управления манипуляторами, помимо самих способов передвижения, состоит в неизмеримо большей, практически неограниченной зоне, преодолеваемых расстояниях и многообразии внешней среды: от земной поверхности до глубин океана и космоса. Системы управления передвижением решают две задачи: навигации и безопасности. Рассмотрим их решение применительно к наземным мобильным роботам. Используемые при этом сенсорные системы были рассмотрены в разд. 3.5. Необходимая модель внешней среды – это карта местности, которая, помимо априорных сведений, составляется и уточняется в ходе движения на основе сенсорной информации (радиотехнические, лазерные, ультразвуковые локаторы, системы технического зрения). Эта модель должна иметь как минимум два уровня по масштабу: первый — в пределах достигаемости сенсорных систем, второй — непосредственно перед роботом. Модель первого уровня служит для прокладки маршрута движения в соответствии с заданной целью — это задача навигации. Варианты целей: поиск конкретных объектов, достижение определенной точки на местности, заданной координатами, движение по заданному маршруту — например, для выполнения определенной технологической операции (инспекция, очистка и т. д.). Вторая, более подробная, модель ближайшего участка местности необходима для уточнения маршрута непосредственно перед роботом с учетом препятствий, не отмеченных на карте местности первого уровня, — это задача обеспечения безопасности движения. Для гарантированного решения второй задачи может потребоваться специальная система обеспечения безопасности, которая контролирует углы наклона шасси робота, не допуская превышения их критических значений, определяемых условиями опрокидывания, выявляет опасные вертикальные провалы и трещины непосредственно перед роботом, оценивает свойства грунта в отношении его проходимости и, Адаптивное и интеллектуальное управление роботами 181 наконец, обеспечивает аварийную остановку робота по сигналам дистанционных или контактных датчиков препятствий непосредственно перед препятствием. На рис. 9.14 приведена типовая схема системы управления движением мобильного робота. Блок управления движением (БУД) осуществляет управление тяговыми приводами и приводами поворота шасси. Блок планирования движения осуществляет построение траектории движения, оптимизируя ее по минимуму расхода энергии, что особенно важно для роботов с автономным энергопитанием, или по минимуму времени выполнения задания, когда в постановку задачи входит условие обеспечения максимального быстродействия. Блок построения карты местности представляет ее в форме, удобной для решения задачи синтеза траектории движения, с выделением непреодолимых препятствий и опасных или неясных участков. Если выполнение задачи требует знания бо́льшего участка местности, чем дают сенсорные системы в начальном положении робота, т. е. до начала движения, карта местности формируется и передается в блок планирования фрагментами по мере передвижения робота. В этом случае первое приближение для всей траектории делается по имеющейся априорной информации о местности или, как минимум, определяется только общее направление движения. На нижнем, общесистемном, уровне находится канал управления движением в ближней зоне, включающий в себя наиболее детальную модель этой зоны и реализующий алгоритмы обеспечения безопасности движения. Перспективным направлением развития систем навигации наземных роботов стали заимствованные у животных аналоговые видеосистемы, основанные на образном распознавании объектов на основе обобщенных зрительных признаков. Такие системы обладают значительно бо́льшим быстродействием и простотой, чем современные цифровые системы технического зрения, осуществляющие распознавание объектов в многомерном пространстве элементарных признаков. Требуемый уровень адаптации и искусственного интеллекта системы определяется степенью неопределенности и сложности местности, а также характером подлежащих выполнению заданий. В последнем отношении основное значение имеет минимально необходимая степень автономности управления роботом, определяемая перечнем его действий, которые должны выполняться без участия человекаоператора. При этом учитывается и возможность временной потери связи с оператором, ограниченная пропускная способность каналов связи, неполнота и ограниченная достоверность получаемой оператором от робота информации и ее задержка во времени. Например, если из-за высокого уровня помех в канале передачи оператор не получает изображения панорамы местности перед роботом или только эпизодически получает эту информацию, он имеет возможность вмешиваться в автономное движение робота только для контроля и корректировки маршрута движения путем целеуказания отдельных промежуточных точек трассы в моменты ее достоверного наблюдения (способы управления движением мобильного робота человеком-оператором рассмотрены далее, в разд. 10.7). среда Построение плана ближайшей зоны Построение модели местности Сенсорные системы ближнего действия и датчики системы безопасности Сенсорные системы Построение карты местности Планирование движения Построение плана обхода и преодоления препятствий Построение маршрута БУД П Рис. 9.14. Функциональная схема управления движением по местности мобильного робота: БУД — блок управления движением; П — приводы; МС — механическая система Внешняя Сенсорные системы дальнего действия с предобработкой сенсорной информации Каналы связи Оператор МС 182 Глава 9 ГЛАВА 10 УПРАВЛЕНИЕ СРЕДСТВАМИ РОБОТОТЕХНИКИ ЧЕЛОВЕКОМ-ОПЕРАТОРОМ 10.1. Человеко-машинные системы В процессе автоматизации техники непрерывно совершенствуются и создаются новые, более совершенные, автоматические машины и системы таких машин. В этой книге ранее уже были рассмотрены различные автоматические системы: программные, адаптивные и интеллектуальные. Впереди нам предстоит создание очередного поколения роботов — разумных. Однако во всех схемах управления, как показано на рис. 9.1, наряду с автоматическим управлением наличествует и управление от человека. Человек — обязательный участник функционирования любой техники, включая робототехнику. И общее решение проблемы управления техникой — это человеко-машинные системы. У человека в них может быть много функций, но главная и уникальная — это верхний уровень в иерархии управления, а общее решение — оптимальное сочетание, симбиоз автоматики и человека. В ходе непрерывного усложнения и интенсификации техники обострилась проблема взаимодействия с ней человека, получившая название проблемы «человеческого фактора». Возникла ситуация «ножниц» между все усложняющейся техникой и остающимися, по существу, неизменными возможностями человека, участвующего в ее функционировании, его «техническими характеристиками». Подтверждением этому служит прогрессирующее нарастание аварий, в том числе глобального характера, по вине персонала, причем, прежде всего, с наиболее современными объектами. На заре развития автоматики бытовал принцип «защиты от дурака». В последнее время все чаще утверждается тезис: «человек имеет право на ошибку». Однако сегодня для все бо́льшего числа технических систем становится более актуальным принцип «защиты от злоумышленника» (террориста, Герострата). В целом эту проблему можно систематизировать так: упомянутая тенденция роста сложности и интенсификации технических систем вызывает повышение функциональных требований к участвующему в их работе 184 Глава 10 человеку, все чаще оказывающихся на пределе его возможностей, а иногда и превышающих их; эта ситуация резко усугубляется в нештатных и аварийных ситуациях, причем обычно непрогнозируемых; человек в технических системах все больше становится компонентом ненадежности; требования к жизнеобеспечению и безопасности человека существенно обременительны для технических систем с его участием; в этом отношении участие человека все более ограничивает перспективы создания новой техники, но, с другой стороны, дает и качественно новые возможности. Принципиально возможны следующие пути решения этих проблем: замена человека техникой и тем самым снятие проблемы «человеческого фактора»; обеспечение контроля за человеком с блокированием его действий, не адекватных ситуаций в тех случаях, когда человек необходим, и современная техника не позволяет его полноценно заменить, или эта замена технико-экономически невыгодна. Такое блокирование осуществляется автоматически при нарушении человеком конкретных, заранее установленных, формализованных ограничений его действий. Если когда-то считалось, что решением проблемы будет полное исключение человека из участия в функционировании технических систем путем сплошной комплексной автоматизации и роботизации, то в настоящее время, в связи с прогрессирующим усложнением решаемых техникой задач, стало очевидным, что никакая техника в обозримом будущем не сможет полностью заменить разум человека. Поэтому общим решением рассматриваемой проблемы может быть только одно — оптимальное сочетание, симбиоз техники и человека. Одним из основных средств такого решения являются робототехника и искусственный интеллект. В свою очередь, в собственно робототехнике эта проблема также существует как проблема «человек-робот». В этой главе рассматриваются состояние решения указанной проблемы и тенденции дальнейшего развития этого раздела робототехники. 10.2. Классификация систем управления средствами робототехники человеком-оператором На рис. 9.1 была показана в общем виде схема системы управления манипуляторами, которая содержит пять уровней управления исполнительными приводами. Соответственно, теоретически возможно управление со стороны человека путем воздействия на все эти уровни. Управление средствами робототехники человеком-оператором 185 Рассмотрим системы управления роботов и других средств робототехники с человеком-оператором в контуре управления. Такие системы относятся уже не к системам автоматического управления (САУ), которые рассматривались ранее, а к автоматизированным системам управления (АСУ) или в более широком плане — к человеко-машинным, или биотехническим системам. На рис. 10.1 приведена схема такой системы управления. Здесь человек-оператор выполняет функции устройства управления. Он получает или сам формирует задание Gч для управляемой им технической системы, получает с помощью своих органов чувств или от сенсорной системы информацию о состоянии внешней среды и самой технической системы и формирует управляющие воздействия G на эту систему так, чтобы обеспечить изменение контролируемых выходных переменных x и Q в соответствии с заданием. Области применения такого управления, как ранее отмечено, — когда реализация автоматического управления на базе современной техники невозможна или невыгодна по сравнению с управлением от человека. Рис. 10.1. Схема человеко-машинной системы управления Первый вариант соответствует достаточно сложным операциям и объектам управления. Примеры таких технологических операций в промышленности: свободная ковка, дуговая сварка сложных изделий, некоторые сборочные и настроечные операции. Примеры таких объектов — мобильные роботы, действующие в сложной непредсказуемой обстановке в космосе и под водой. Ко второму варианту, когда управление от человека может оказаться более предпочтительным, относятся некоторые технологические операции, выполняемые человеком быстрее, лучше и дешевле, хотя они вполне поддаются роботизации (например, некоторые сборочные и сварочные операции) или особо ответственные операции, которые человек не может доверить автомату. В последнем случае оптимальным решением обычно и становится комбинация автоматического и автоматизированного от человека-оператора управления. Однако следует отметить, что практически во всех системах, называемых автоматическими, человек-оператор все-таки тоже эпизодически участвует в процессе управления. Это может происходить на этапе программирования, при взятии опе- 186 Глава 10 ратором на себя управления в нештатной ситуации, при оперативной корректировке действий робота в случае изменения ситуации. Рассмотрим системы управления средствами робототехники со стороны человекаоператора. Чтобы охватить все возможные варианты такого управления, начнем с их классификации. Итак, в зависимости от уровня в иерархии управления, на котором участвует человек (см. рис. 9.1), различают следующие типы управления: • командное управление отдельными приводами на первом уровне управления; • управление копирующее или с помощью задающей рукоятки на втором (программном) и третьем (адаптивном) уровнях; • супервизорное и интерактивное управление на четвертом уровне; • планирование. По месту нахождения (удалению) человека-оператора относительно управляе- мого объекта различают: • местное управление; • дистанционное управление (с механической или электрической связью с управляемым объектом на десятки метров или кабельное управление до сотен метров); • телеуправление (управление по каналам связи без ограничения дальности). В отличие от дистанционного телеуправление означает наличие в системе управления системы связи, в которой передаваемая информация претерпевает преобразование в форму, специально предназначенную для преодоления больших расстояний. При этом такая система связи может оказаться даже сложнее всей остальной системы управления. По функциям, выполняемым человеком, возможны следующие варианты его участия: • выполнение функций верхнего уровня системы управления (обработка сенсорной информации, оценка ситуации, принятие решений и планирование поведения); • управление выполнением конкретных технологических операций; • программирование. По способу подключения человека-оператора к технической системе различают: • устройства управления, входящие в состав управляемого объекта (например, робота), и специально предназначенные для управления объектом только человеком-оператором (например, задающий манипулятор в системе копирующего манипулятора); • устройства, входящие в состав устройства автоматического управления и предназначенные для перехода к управлению человеком-оператором (напри- Управление средствами робототехники человеком-оператором 187 мер, переносной пульт оператора для программирования робота методом обучения); • специальные устройства, выполняющие функции интерфейса «операторробот», которые могут подключаться к устройству управления робота для выполнения каких-либо из упомянутых ранее функций по его управлению. Рассмотрим системы управления в соответствии с приведенной классификацией по уровням управления. 10.3. Системы командного управления Такое управление реализуется человеком-оператором на нижнем уровне управления роботом путем управления отдельными приводами обычно в релейном режиме. Командное управление применяется исключительно как дополнительный способ управления, например, в промышленных роботах для их программирования методом обучения или в аварийных и нештатных ситуациях. Точность такого управления определяется умением оператора, через которого замыкается зрительная обратная связь в контуре управления. Быстродействие при этом низкое, т. к., во-первых, для получения приемлемой точности такое управление ведется обычно на сниженной скорости, а во-вторых, потому что здесь для перемещения рабочего органа манипулятора в очередную позицию приводы включаются по очереди последовательно. 10.4. Системы копирующего управления манипулятором Этот способ дистанционного управления манипуляторами человеком-оператором был изобретен для выполнения работ в опасных для человека условиях (рис. 10.2 иллюстрирует принцип такого управления). Объектом управления является исполнительный манипулятор (ИМ), а органом управления им служит задающий манипулятор (ЗМ). Задающий манипулятор кинематически подобен исполнительному. Вместо рабочего органа, которым оснащен исполнительный манипулятор, у задающего имеется рукоятка, которую оператор держит в своей руке. Звенья манипуляторов связаны таким образом, что оператор, перемещая свою рукоятку, заставляет рабочий орган исполнительного манипулятора повторять это движение. Таким образом, исполнительный манипулятор повторяет, копирует движение задающего. Отсюда и название этой манипуляционной системы — копирующий манипулятор. Казалось бы, эти манипуляционные системы, которые появились еще до современной робототехники, — анахронизм. Однако и сегодня они остаются одним из основных средств работы с радиационными материалами на производстве, обладая лучшей точностью. У первых конструкций таких манипуляторов не было приводов, а звенья исполнительного и задающего манипуляторов были соединены механически тросами и тя- 188 Глава 10 гами, посредством которых звенья исполнительного манипулятора перемещались под действием усилия со стороны человека-оператора, приложенного к задающему манипулятору. Рис. 10.2. Принцип действия копирующего манипулятора В следующем поколении копирующих манипуляторов эти механические связи были заменены электрическими в виде синхронных передач. На рис. 10.3 показан внешний вид такой системы из двух копирующих манипуляторов со снятыми с блоков приводов кожухами. Значительно бо́льшие точность и быстродействие при практически неограниченной грузоподъемности имеют копирующие манипуляторы на следящих приводах, которые отрабатывают рассогласование датчиков положения соответствующих звеньев обоих манипуляторов. В результате исполнительный манипулятор в целом и его рабочий орган отслеживают положение задающего манипулятора, перемещаемого оператором (пример такой системы был приведен на рис. 1.4). Задающий манипулятор может быть значительно меньше исполнительного, чтобы лучше соответствовать размерам рабочей зоны руки человека и сократить объем, занимаемый оператором с задающим манипулятором. Современные копирующие манипуляторы снабжаются силовым очувствлением рабочего органа. Оператор, перемещая задающий манипулятор, ощущает на своей руке противодействующее усилие, пропорциональное усилию, с которым рабочий орган исполнительного манипулятора действует на объекты внешней среды. Это так называемый эффект отражения усилия. Ранее уже отмечалось, что такое очувствление необходимо для выполнения силовых операций. На рис. 10.4 приведена функциональная схема одного канала копирующего манипулятора со следящими приводами. Эта схема называется симметричной, т. к. Управление средствами робототехники человеком-оператором Рис. 10.3. Электрический копирующий манипулятор МЭМ (Россия) Рис. 10.4. Функциональная схема симметричной системы управления степенью подвижности копирующего манипулятора: УУз, УУи — устройства управления приводов задающего и исполнительного манипуляторов 189 190 Глава 10 в ней задающая и исполнительная части идентичны. На входы их приводов подается с разным знаком рассогласование Δα = α и − α з , где αи и α з — углы поворота приводов степени подвижности соответственно исполнительного и задающего манипуляторов. Скоростная обратная связь, осуществляемая с помощью датчиков скорости ДСИ и ДСЗ, создает обычную динамическую коррекцию. При повороте оператором задающей оси на угол α з появляется рассогласование Δα, которое приводит к возникновению на исполнительной оси движущего момента МИ сонаправленного с α з и вызывающего изменение αи в том же направлении. На задающей стороне под действием этого же сигнала рассогласования Δα, поступающего с обратным знаком, возникает такой же по величине момент, но соответственно направленный против поворота αи , т. е. противодействующий изменению αи . Оператор воспринимает этот момент, как если бы он непосредственно поворачивал исполнительную ось, преодолевая сопротивление нагрузки. В этом и заключается эффект отражения усилия. На рис. 10.5 показана несимметричная схема системы управления, в которой исполнительный привод отрабатывает угол α з , в то время как задающий привод отрабатывает момент МИ. Благодаря непосредственному измерению момента МИ эта схема обеспечивает большую точность отражения усилия. Для получения необходимого качества отработки момента здесь также применяются гибкие обратные связи и последовательные корректирующие звенья. – kм ΔM = kмMи – MЗ αз Оператор ДМЗ ДЗ УУи УУЗ αи М и Ди ДМи Нагрузка Мз ДСи Δα ДПЗ – ДПи Рис. 10.5. Функциональная схема несимметричной системы управления степенью подвижности копирующего манипулятора: ДМз, ДМи — датчики момента В копирующих манипуляторах для расширения их функциональных возможностей применяют средства адаптации, чтобы при изменении характера задания или внешних условий соответственно изменять алгоритм управления, т. е. структуру системы. Так, например, при выполнении транспортных операций по перемещению грузов или просто перемещению рабочего органа исполнительного манипулятора к месту выполнения технологической операции целесообразно отключать ненужный для такой операции контур отражения усилия с тем, чтобы облегчить оператору выполнение этой операции, устранив необходимость физического преодолевания Управление средствами робототехники человеком-оператором 191 противодействующего усилия. Особенно это существенно при перемещении больших грузов и в течение длительного времени. 10.5. Системы управления с задающей рукояткой Принцип действия этих систем поясняет рис. 10.6, а. Задающая рукоятка (джойстик) с вычислителем выполняют ту же функцию, что и задающий манипулятор в системе копирующего манипулятора на рис. 10.2, т. е. по задаваемой рукой оператора траектории рабочего органа манипулятора xрз (t ) определяются задания qз (t ) его приводам. Однако здесь это делается с помощью математической модели манипулятора путем решения обратной задачи кинематики. а) б) Рис. 10.6. Функциональная схема системы управления с задающей рукояткой (ЗР) На рис. 10.6, б показан вариант кинематической схемы трехстепенной шарнирной задающей рукоятки. Каждая степень подвижности оснащена датчиком положения. Оператор, смещая своей рукой задающую рукоятку с нейтрального положения, задает с помощью этих датчиков координаты xрз рабочего органа манипулятора. Вычислитель по ним определяет задания для приводов qз . Для управления движением рабочего органа в общем случае требуется задавать шесть координат: три переносные и три ориентирующие угловые. Для их задания применяются две трехстепенные задающие рукоятки: одна — для управления перемещением, а другая — для ориентации рабочего органа. Существуют также и шестистепенные рукоятки. 192 Глава 10 Преимущества задающей рукоятки по сравнению с задающим манипулятором следующие: минимальное число степеней подвижности, независимое от числа степеней под- вижности управляемого манипулятора, что обеспечивает бо́льшую простоту и компактность; возможность реализации большего числа различных режимов управления, а именно: • управление по положению — позиционное; • управление по скорости — скоростное; • управление по силе — силовое. При описании принципа действия системы управления с задающей рукояткой (рис. 10.6) имелся в виду позиционный способ управления. В этом случае перемещение задающей рукоятки определяет установку абсолютных координат рабочего органа xрз . По ней вычислитель определяет задания приводам qз = f −1 (xрз ), отработку которых и выполняет исполнительный манипулятор (ИМ), перемещая рабочий орган в заданную позицию. Таким образом, этот способ управления идентичен системе с задающим манипулятором. Скоростной способ управления означает, что смещение задающей рукоятки с нейтрального положения задает вектор скорости рабочего органа манипулятора, т. е. направление смещения рукоятки определяет направление движения, а величина смещения — величину скорости движения рабочего органа. Меняя положение задающей рукоятки в ходе движения манипулятора, оператор может маневрировать его рабочим органом в реальном масштабе времени. Вычислитель при этом рассчитывает задания для скоростей приводов qз = f −1 (xрз ), а те отрабатывают их в режиме скоростных следящих систем. Такой способ наиболее удобен для управления транспортными операциями в свободном пространстве, т. е. при отсутствии препятствий. Силовой (силомоментный) способ управления предполагает, что перемещение задающей рукоятки определяет вектор силы, с которой рабочий орган должен воздействовать на объекты внешней среды. Приводы манипулятора в этом случае имеют соответственно управление по силе (см. разд. 8.5) и отрабатывают рассчитываемые вычислителем уставки для силы: Qпз = J Т (Qрз ). Этот способ управления применяется при выполнении технологических операций, требующих управляемого силового воздействия на объект операции. В этом случае задающая рукоятка должна иметь силовое очувствление, создающее эффект отражения усилия, действующего на рабочий орган манипулятора, как в копирующих манипуляторах (см. пунктирную линию на рис. 10.6, а). Управление средствами робототехники человеком-оператором 193 Для выполнения конкретных операций часто применяют следующие комбинации этих трех способов управления: скоростно-позиционное управление — здесь для осуществления чисто транспортного движения в свободном пространстве применяется скоростное управление, а для выполнения последующих точных технологических операций, например, сборочных, — позиционное. Переход от одного способа управления к другому может осуществляться самим оператором или автоматически в функции от отклонения рукоятки. При приближении рабочего органа манипулятора к месту выполнения операции, требующей позиционирования, оператор снижает скорость движения, приближая задающую рукоятку к нейтральному положению. Автоматическое переключение на позиционное управление осуществляется при этом в функции от отклонения задающей рукоятки или от величины скорости, когда последняя становится достаточно малой. Само переключение заключается в изменении алгоритма работы вычислителя; скоростно-силовое управление — в отличие от предыдущего способа, здесь при подходе к месту выполнения технологической операции осуществляется переход не к позиционному, а к силовому управлению, которое требуется для выполнения данной операции. Для автоматического изменения способа управления может использоваться сигнал о контакте с объектом выполнения операции, получаемый от датчика силы (момента), находящегося в контуре силового управления; позиционно-силовое управление — здесь последовательно осуществляются эти два способа управления; скоростно-позиционно-силовое управление — в этом случае в последовательности, определяемой технологической операцией, осуществляется применение всех трех способов управления. Системы управления, в которых используются рассмотренные комбинации нескольких способов управления, относятся к адаптивным системам с переменной структурой. Изменение структуры, как отмечалось ранее, может осуществляться автоматически или оператором. Система управления с задающей рукояткой имеет один очевидный недостаток по сравнению с копирующим манипулятором — дополнительную погрешность вычислителя qз . 10.6. Системы супервизорного и интерактивного управления Супервизорный способ управления представляет собой последовательность автоматически выполняемых роботом освоенных и заранее занесенных в его память типовых операций, в промежутках между которыми оператор задает очередную операцию, обеспечивая таким образом выполнение определенной сложной работы. Эти операции могут быть и программными, и адаптивными. Директивы оператора включают два вида информации: название (код) типовой операции и ввод численных значений 194 Глава 10 некоторых параметров программы этой операции. Типичным видом вводимой информации являются необходимые для выполнения операции координаты объектов внешней среды (координаты подлежащих взятию предметов или места, куда требуется вывести рабочий орган манипулятора, и т. п.). Эта информация может задаваться различным образом: через клавиатуру, на сенсорном экране дисплея, с помощью речевого командного устройства и других средств общения. Более совершенное интерактивное управление предполагает двустороннюю, т. е. диалоговую, связь с роботом. Робот (его устройство управления) после получения определенного задания может запросить у оператора недостающую для его выполнения информацию или какие-либо уточнения, сообщить о невыполнимости той или иной операции с указанием причин, о возникновении неисправности и т. п. В свою очередь, оператор может предварительно запросить у робота дополнительную информацию о состоянии его отдельных систем, содержании памяти, дополнительную сенсорную информацию о внешней среде. Для реализации диалогового режима в развитой форме, включая речевой обмен, требуется интеллектуальный интерфейс «оператор-робот» (см. разд. 9.3). Рассматриваемые в этой главе способы управления от человека-оператора обычно применяются совместно с автоматическим управлением, а представленные в этом разделе системы как раз являются примерами именно таких комбинированных систем. В промышленных роботах с программным управлением широко используется способ программирования обучением, основанный на управлении со стороны оператора. Наоборот, в системах, где основным способом управления является управление от человека-оператора, отдельные операции, которые могут выполняться автоматически, стремятся осуществлять в автоматическом режиме. Объединять эти два типа управления можно как последовательно, когда один тип управления сменяется другим, так и параллельно, когда, например, человек-оператор корректирует ход в целом автоматически выполняемой операции. На рис. 10.7 демонстрируется вариант такого комбинированного управления роботом. Через блок программирования (БП) осуществляется автоматическое управле- Рис. 10.7. Функциональная схема системы комбинированного автоматического и автоматизированного управления от задающей рукоятки: БП — блок программирования; БУП — блок управления приводами Управление средствами робототехники человеком-оператором 195 ние движением исполнительных систем робота. Через задающую рукоятку (ЗР) оператор может корректировать этот процесс (в том числе, как показано на схеме, в режиме силового управления с отражением усилия) или полностью брать на себя управление, например, в аварийных ситуациях. Кроме того, он может включаться в процесс в режиме супервизорного управления через блок программирования. 10.7. Особенности управления человеком-оператором средствами передвижения Общая функциональная схема управления движением мобильного робота с участием человека-оператора была представлена в разд. 9.4 (см. рис. 9.16). Из рассмотренных способов управления оператором для управления передвижением робота не применяется, естественно, только система копирующего управления. Командное управление — в данном случае приводами колес шасси робота — применяется для выполнения дискретных команд «вперед-назад», «влевовправо» с дискретным заданием скорости движения и команды «стоп». Кроме того, такое управление используется для подвижных, обычно двухстепенных, передающих телевизионных камер и локаторов обзора местности, а также для различного навесного оборудования, которым может быть оснащено шасси робота. Управление с помощью задающей рукоятки — основной способ дистанционного управления или телеуправления мобильными роботами. О применении супервизорного управления в мобильных роботах говорилось в разд. 9.4. Интерактивный режим управления имеет особенно большое значение при дви- жении мобильных роботов в неизвестной среде. В этом случае диалоговый режим часто необходим при планировании маршрута, а также при возникновении непредвиденных препятствий. Как правило, возможность оперативного подключения при этом человека-оператора особенно важна. Системы управления мобильных роботов подводного, воздушного и космического базирования имеют в целом ту же функциональную структуру и используют те же способы управления, что и наземные роботы. Однако, конечно, они отличаются системами передвижения и динамикой. Основные тенденции развития систем управления мобильных роботов со стороны человека-оператора следующие: развитие систем отображения внешней ситуации вокруг робота, включая ее трехмерную визуализацию (виртуальная реальность), и реализация эффекта присутствия оператора непосредственно у робота; развитие интеллектуальной среды информационной поддержки оператора, основанной на моделировании и прогнозировании в реальном времени поведения робота и состояния окружающей среды; 196 Глава 10 развитие чисто электронных, лишенных подвижных механических частей, средств управления роботом от оператора (сенсорные экраны, перчатки и т. п.). В заключение сформулируем общие тенденции развития систем управления роботов. Робот по определению является автоматической машиной и поэтому основой его системы управления должно быть автономное автоматическое управление. Но одновременно над ним обязательно должен существовать верхний уровень управления от человека-оператора. Что касается автономного управления, то здесь тенденция развития очевидна — это искусственный интеллект и далее креативность, включая освоение технических аналогов нейронных сетей. Пределом такого развития, его недостижимым образцом являются способности мышления человека. Последнее позволяет сформулировать и функции указанного второго канала управления от оператора. Это реализация всех тех операций, которые по разным причинам пока не удалось осуществить автоматически или они даже принципиально так нереализуемы или недопустимы в таком режиме, а требуют участия человека. Даже в промышленной робототехнике таких операций много (сложная дуговая сварка, кузнечные работы и т. д.), а тем более в экстремальной робототехнике. Основной способ такого управления — супервизорное и диалоговое управление на основе комбинаций ранее отработанных программных и адаптивных автоматических операций. Перспективы развития этого способа управления очевидны, включая аппаратурную реализацию. Однако главной задачей является развитие позиционно-силового управления роботами в реальном времени от человека-оператора, реализующего все интеллектуальные и творческие способности человека. В конечном итоге требуется создать методику такого управления и соответствующее аппаратное обеспечение. Конечно, в соответствии с возможностями органов чувств человека основными каналами такого управления будут видеоканалы (техническое зрение, 3D виртуальная реальность и т. д.) и речевой канал. В целом именно на основе робототехники должна решаться фундаментальная проблема оптимального взаимодействия человека и техники в новом техногенном мире. ГЛАВА 11 ГРУППОВОЕ УПРАВЛЕНИЕ В РОБОТОТЕХНИЧЕСКИХ СИСТЕМАХ 11.1. Задачи группового управления Групповое управление — это совместное связанное управление несколькими объектами, в том числе роботами. Основной целью такого управления является выполнение группой общей технологической операции c распределением отдельных ее задач между участвующими в группе объектами. Кроме того, оно может требоваться и для предотвращения взаимных помех — например, столкновений движущихся объектов при выполнении ими самостоятельных операций в общем пространстве. Примеры задач группового управления: управление группой производственного оборудования — например, в составе технологической линии, совместно реализующей общий технологический процесс; управление группой подвижных объектов (летательные аппараты, автомашины и т. п.), движущихся строем и решающих различные общие задачи. Применяемые в робототехнике системы группового управления включают следующие уровни: совместное управление приводами исполнительных систем роботов; управление несколькими манипуляторами одного робота; совместное управление несколькими роботами; управление роботами и совместно работающим с ними другим технологическим оборудованием в составе технологических комплексов. 11.2. Групповое управление в живой природе и в обществе Робототехника еще очень долго будет учиться у живой природы, в том числе это относится и к управлению. Поэтому мы начнем рассмотрение задач группового управления роботами с анализа группового управления в природе и обществе. 198 Глава 11 В мире животных существуют постоянные и временные сообщества. Их основная цель — повышение выживаемости. Наименьший такой коллектив — семья, более крупные — стаи и, наконец, самые многочисленные коллективы сформировались у муравьев, пчел, ос и других насекомых, живущих колониями. Причем эти коллективы демонстрируют уровень поведения вплоть до интеллектуального, совершенно недостижимый для отдельных их участников. Принципы организации и управления у таких сообществ включают централизованное управление, специализацию членов (причем тем бо́льшую и более узкую, чем крупнее коллектив) и сочетание общих целей с индивидуальными. При этом в рамках коллективных действий общие цели имеют приоритет — вплоть до самопожертвования отдельных особей ради общего блага. В больших коллективах одновременно со специализацией возникает иерархия, и индивидуальные интересы проявляются лишь настолько, насколько это позволяет центральная власть, — например, вожака (при дележе добычи и т. п.). При этом, если в немногочисленных группах их вожаки еще участвуют во всех действиях членов группы («делай как я, делай лучше меня»), реализуя принцип управления «с ведущим (лидером)», то в более крупных сообществах с возникновением иерархической структуры их руководители ограничивают свои функции чисто управленческими, командными, и с дальнейшим усложнением этих функций возникают целые последующие функциональные уровни. Когда это целесообразно для выживания, возникают и вре́менные коллективы. Например, волки зимой сбиваются в стаи во главе с наиболее опытным и сильным вожаком. Птицы при сезонных дальних перелетах летят определенным строем. Воробьи и многие другие мелкие птицы для большей безопасности и коллективного поиска корма сбиваются во временные группы без выделения вожака. Аналогичные примеры известны у рыб и различных водных животных. В целом, в подобных коллективах возникли три основных способа управления: централизованное (с вожаком), децентрализованное (взаимная координация действий) и чисто стайное, когда каждый член стаи самостоятельно преследует общую цель. В основе человеческого общества также лежит коллективное поведение. Типовая форма организации и управления, сформировавшаяся в результате длительного опыта, — это централизованная иерархическая система, в которой один человек управляет не более чем 10–12 подчиненными. Этим числом и ограничивается предельное количество заместителей руководителей крупных формирований, численность подразделений нижнего уровня (лабораторий, секторов и т. п.) и структура следующих уровней (отделов, цехов, отделений и т. д.). Существуют и более сложные управляемые структуры — матричного типа — с параллельными управляющими системами, замыкающимися на общие исполнительные объекты и выполняющими разные функции. Например, наряду с основной административной структурой могут параллельно существовать наложенные на нее структуры управления качеством, социальные и т. д. Групповое управление в робототехнических системах 199 Аналогично строятся более крупные структуры — отраслевые, региональные и т. д., вплоть до глобальных в большой энергетике, на транспорте, связи, в компьютерных сетях. Групповое управление везде начиналось с централизованного, как наиболее простого алгоритмически. Последующая тенденция — постепенное развитие децентрализации с передачей на местный уровень части функций центра. Основные очевидные достоинства такого подхода: наилучший учет местных условий, наибольшая точность координации соседних объектов и надежность, а также освобождение от таких недостатков централизованного управления, как большая размерность и объем обработки всей информации в центре с полной зависимостью периферии от центра и от связей с ним. Наиболее четкая формализованная структура управления существует в армии. Аналогично функционируют и группы в командных видах спорта (футбол, баскетбол и т. п.), возглавляемые своими капитанами и тренерскими штабами. Обобщая изложенное, сформулируем основные принципы групповой организации и управления, которые выработаны в природе и в человеческом обществе и должны быть учтены и в робототехнике: 1. Основу всех систем группового управления составляют следующие типы управления: централизованное, децентрализованное, стайное и их комбинации, которые могут существовать во времени и в пространстве как последовательно, так и параллельно. 2. В общем случае структуры группового управления являются иерархическими с функциональной специализацией по уровням и выработанными оптимальными значениями численности управляемых объектов на каждом уровне. 3. Одни и те же объекты управления могут входить в состав нескольких структур, параллельно преследующих разные, но не антагонистические цели. 4. Управление этими структурами также является в общем случае иерархическим и комбинированным — при сочетании принципов централизованного и децентрализованного управления. Первый реализует общесистемные цели, а второй — осуществляет координацию действий членов своей группы и адаптацию к местным условиям. 5. Эволюция систем группового управления идет в направлении увеличения децентрализации с сохранением за центром обеспечения общесистемных, не поддающихся декомпозиции, функций группы. 6. Группы нижнего уровня могут иметь децентрализованное управление с параллельным централизованным управлением объектами группы, осуществляемым с верхнего уровня, или с выделением в группе централизованно управляемого ведущего объекта. 200 Глава 11 11.3. Принципы группового управления роботами На основании изложенного можно сформулировать следующие общие рекомендации для организации и управления группами роботов. 1. Общее решение — иерархическая комбинированная централизованно-децентрализованная система группового управления. 2. Ее основа — нижний уровень децентрализованного управления и поведения с распределением общей цели между роботами. Ключевая проблема группового управления роботами — оптимизация состава роботов, включая их число, специализацию, способы распределения общей цели и координацию действий отдельных роботов. 3. Для решения последней задачи необходимо руководствоваться критериями оптимальности, соответствующими конкретным целям. Ими могут быть время достижения цели (быстродействие), общие энергозатраты, стоимость и т. п., а также комбинация подобных критериев при заданных ограничениях других показателей (надежность, ресурс, возмущающие воздействия и пр.). Основные варьируемые параметры при заданной общей цели — это число роботов, распределение между ними этой цели в виде подцелей, соответствующая их специализация, объем информационного обмена между роботами. 4. Следующая задача — разработка структуры всей иерархической системы управления группой роботов, начиная от верхнего уровня целеполагания и планирования, а также технической диагностики и восстановления функционирования группы при отдельных отказах. 5. Наконец, последняя задача — разработка алгоритмов обработки информации и управления для систем управления, синтезированных таким образом. Во временно́м аспекте эта задача подразделяется на две: задачу оценки ситуации, принятия решений к действию и планирования этих действий и задачу непосредственного управления этими действиями в динамике. Первая задача реализуется в основном до начала самих действий, но с возможностью оперативной корректировки уже в ходе этих действий, а вторая — непосредственно в процессе управления в реальном масштабе времени. Этим указанные задачи принципиально различаются. Наиболее сложными эти задачи оказываются в условиях организованного противодействия со стороны другой группы роботов (или объектов другого типа), когда условием успеха становится быстрота и неординарность реакций на действия противника. Продемонстрируем возможный подход к синтезу структуры группового управления на уровне планирования по критерию обеспечения заданного времени выполнения этой задачи [17]. На рис. 11.1 приведены качественные зависимости времени принятия решения в системе группового управления, использующей различные способы управления, от числа объектов в группе. Групповое управление в робототехнических системах 201 t Рис. 11.1. Зависимость времени принятия решения от способа группового управления При централизованном управлении центр принимает решение о действиях всех подчиненных ему объектов группы. При этом сложность задачи возрастает экспоненциально с ростом числа объектов в группе, и соответственно экспоненциально возрастает время ее решения. При использовании децентрализованного группового управления каждый объект группы принимает решения только за себя, обмениваясь информацией с другими членами группы с целью оптимизации группового решения. Поэтому время группового решения в такой группе возрастает линейно при увеличении числа ее членов. График времени решения при использовании смешанного способа управления будет находиться где-то между двумя такими графиками. Из графика, показанного на рис. 11.1, зная количество объектов в группе и требуемое значение времени группового решения tреш, можно выбрать способ управления, который более приемлем в конкретном случае. Например, если число объектов меньше N1, то предпочтительнее использование централизованного управления, поскольку оно обеспечивает более оптимальное групповое решение. Если число объектов в группе лежит в пределах от N1 до N3, целесообразно смешанное управление. Если же число объектов в группе больше N3, следует переходить к иерархическому разбиению группы на подгруппы и, используя децентрализованное управление, сначала обеспечить распределение задания между подгруппами, а затем, основываясь на том же подходе, принимать решения о способах управления объектами внутри каждой подгруппы. 202 Глава 11 При дальнейшем увеличении числа объектов в группе необходимо соответственно увеличивать число уровней иерархии, чтобы «вписаться» в требуемое время принятия группового решения. Значение требуемого времени решения tреш зависит от условий, в которых должна функционировать группа. Например, если это группа промышленных роботов с программным управлением, функционирующих в стационарных условиях, то ограничения на время решения задачи их группового управления практически не накладываются, поскольку эта задача может быть решена заранее, а результаты решения могут быть заложены в программы. Если же роботы должны функционировать в условиях заранее неизвестных, то такой подход уже не применим. В этом случае необходимо принимать групповое решение в зависимости от темпа изменения ситуации в среде. Если ситуация меняется медленно, например, если роботы используются просто для исследования некоторой местности, возможно применить смешанное групповое управление, при котором из центра поступают задания для каждой подгруппы роботов, а внутри подгруппы используется децентрализованное управление. Если же ситуация меняется быстро, как, например, в боевой обстановке, то и решение о групповых действиях надо принимать быстро, вплоть до отказа от поиска оптимального решения. В этом случае необходимо ориентироваться на децентрализованное управление. Простейший случай группового управления в робототехнике — это управление системой приводов одного манипулятора. Практически всегда — это уже рассмотренное ранее централизованное параллельное управление приводами. Как было отмечено, простота такого управления оборачивается завышенными требованиями к точности управления отдельными приводами — по сравнению с требуемой точностью позиционирования рабочего органа манипулятора, которая при таком управлении определяется совокупностью погрешностей всех приводов. С ростом требований к точности управления абсолютными координатами рабочего органа возникает необходимость переходить к пока еще редко применяемому из-за своей сложности управлению непосредственно по этим координатам и оснащать манипулятор соответствующей сенсорикой. (Управляющие воздействия на отдельные приводы рассчитываются при этом решением обратной задачи кинематики или динамики в зависимости от требуемого быстродействия манипулятора.) В результате происходит переход к управлению с ведущим, где роль ведущего звена играет рабочий орган манипулятора. Такой способ управления был предложен, в частности, для движения манипуляторов в стесненных условиях типа лабиринта. С развитием систем адаптивного и интеллектуального управления роботами в них также намечается тенденция децентрализации путем распределения между отдельными их системами задач обработки сенсорной информации, формирования моделей среды и т. д. Первоначально аппаратной базой этого стали транспьютеры, а затем технические нейронные сети. Основная область группового управления в робототехнике — это управление несколькими роботами, выполняющими общую задачу. Простейший вариант такого управления — синхронизация выполняемых отдельными роботами или другими средствами робототехники операций, т. е. согласование их действий во времени. Групповое управление в робототехнических системах 203 Это требуется при выполнении группой роботов общей работы, которая распадается на последовательно выполняемые отдельными роботами технологические операции. При этом рабочие зоны этих роботов не пересекаются и, следовательно, опасность столкновения их манипуляторов отсутствует. Пример — управление группой роботов на сборочной линии, где роботы последовательно выполняют пооперационную сборку какого-либо изделия. Следующая задача группового управления роботами — это координация их движения в пространстве. Простейший пример — предотвращение столкновений манипуляторов или мобильных роботов. Для манипуляторов это может иметь место при одновременной работе, когда их рабочие зоны перекрываются. Предельный случай — это работа манипуляторов на общем рабочем месте, например, в составе сборочного центра. Общее решение здесь — применение системы децентрализованного управления как системы безопасности от столкновений. Однако, если имеется возможность программно обеспечить несоприкосновение манипуляторов, причем с достаточным запасом, возможно применение и централизованного управления без контроля относительных координат или с их контролем, но уже в качестве дополнительной системы аварийной блокировки. Еще более сложная задача — это обеспечение совместной работы манипуляторов с координацией движений одновременно и в пространстве, и во времени, т. е. координация траекторий движения в реальном масштабе времени. Примером может служить операция сборки путем механического соединения деталей, перемещаемых манипуляторами. Перемещение деталей в зону сборки может осуществляться с помощью централизованного управления. Однако сама операция сборки требует перехода к децентрализованному управлению относительными координатами. Наиболее сложная задача группового управления — управление гибкими производственными системами, в которых промышленные роботы функционируют совместно с различным технологическим оборудованием, транспортной и складской системами, — на рис. 11.2 показан состав такой гибкой производственной системы (эти системы будут подробнее рассмотрены в разд. 14.3 главы 14). Каждая из показанных на рис. 11.2 систем имеет многоуровневую структуру. Уровни внутри систем соединяются друг с другом по вертикалям, а между системами — по горизонталям, т. е. на своих иерархических уровнях. В табл. 11.1 показаны эти уровни. Их четыре: 1 — единица технологического оборудования, 2 — технологическая ячейка, 3 — технологический участок и 4 — цех. Внутри этих основных уровней могут иметься еще и свои подуровни. В технологических ячейках роботы и другие средства робототехники могут применяться на основных и вспомогательных операциях по обслуживанию основного технологического оборудования (роботизированная технологическая ячейка). В первом случае все части ячейки находятся обычно под управлением устройства управления робота. Во втором случае устройство управления робота обычно подчиняется устройству управления основного технологического оборудования. Однако возможна и обратная взаимосвязь. Например, в технологических модулях холодной штамповки управление прессом часто осуществляется от устройства управления обслуживающего его робота. 204 Глава 11 Рис. 11.2. Состав гибкой производственной системы (широкими стрелками показаны материальные потоки) Таблица 11.1. Уровни управления гибкой производственной системы Уровни управления Функции Состав 1. Единица оборудования Совместное управление приводами. Устройство управления оборудованием, соединенное с устройством управления ячейки, в которую оно входит 2. Технологическая ячейка Совместное управление частями ячейки. Устройство управления ячейки. Контроль качества продукции. Пульт управления, соединенный с локальной сетью Контроль технического состояния Контроль технического состояния (диагностика) ячейки. Обработка сенсорной и другой информации. Ввод/вывод информации на пульт и в локальную вычислительную сеть участка Групповое управление в робототехнических системах 205 Таблица 11.1 (окончание) Уровни управления 3. Технологический участок Функции Состав Совместное управление технологическими ячейками, складскими и транспортными системами участка. Локальная вычислительная сеть участка. Сбор и обработка информации о качестве продукции и техническом состоянии оборудования. Компьютер с интеллектуальным интерфейсом Подготовка и хранение программного обеспечения. Ввод/вывод информации на пульт и в локальную вычислительную сеть участка и в сеть цеха 4. Цех Совместное управление технологическим оборудованием цеха. Локальная вычислительная сеть цеха. Сбор и обработка информации о качестве продукции и техническом состоянии оборудования. Компьютер с интеллектуальным интерфейсом Подготовка и хранение программного обеспечения для подразделений цеха. Оперативно-календарное планирование. Связь с участками и с соседними и вышестоящими подразделениями предприятия В транспортных системах роботы применяются непосредственно как транспортное средство и для выполнения погрузочно-разгрузочных операций. В последнем случае робот управляется устройством управления соответствующей транспортной системы. В складских автоматизированных системах средства робототехники нашли применение прежде всего в виде штабелеров, обслуживающих ячейки стеллажных складов. Каждый из четырех уровней управления, приведенных в табл. 11.1, реализуется в виде системы микропроцессорных устройств управления, объединенных локальной вычислительной сетью. Поскольку здесь есть верхний уровень с интеллектуальным пультом общего управления всей иерархической структурой, общим способом управления является централизованное четырехуровневое управление с центрами на каждом уровне, подчиненными центрам вышестоящего уровня. Вместе с тем, на отдельных уровнях могут применяться и рассмотренные ранее децентрализованные способы управления. 206 Глава 11 Оперативно-календарный план (ОКП) цеха определяет план выпуска продукции на ближайшее время, включая очередную рабочую смену, поставку на рабочие места необходимого материального обеспечения и ввод в устройства управления оборудования, участвующего в производственном процессе, управляющих программ. Совокупность таких программ обеспечивает необходимую координацию действий всех частей рассматриваемого производственного комплекса с контролем при этом качества продукции, технического состояния работающего оборудования, с транспортировкой готовой продукции, отходов производства и пр. Развитие способов и средств управления постоянно стимулирует поиски путей ослабления централизованного начала в управлении производством с тем, чтобы иметь возможность максимально учитывать местные условия при сохранении единой, т. е. централизованной стратегии. Даже в показанной на рис. 11.2 схеме современной системы управления цехом, эта тенденция отчетливо прослеживается, особенно если сравнить эту схему с типовыми структурными схемами управления цехами недалекого прошлого. На уровне руководства цеха в ней определенно осталось только оперативно-календарное планирование, диспетчеризация, сбор и хранение сводной информации по отдельным аспектам действий подразделений цеха. На рис. 11.3 показан предельный вариант дальнейшей децентрализации управления подобными производствами. Все участники производственного процесса в виде технологических модулей (ТМ) и функциональных модулей (ФМ) объединены локальной вычислительной сетью через шину данных. Функциональные модули — это устройства, выполняющие определенные общесистемные функции, и в совокупности они реализуют функции уровня централизованного управления всем производственным процессом. К ним относятся модули загрузки оборудования, обеспечения инструментом, транспортировки, управляющих программ, подготовки сводной информации, интерфейса оператора и т. д. ФМ1 ... ФМn Шина данных ТМ1 А1 УУ1 ТО1 ТМi ... Аi УУi ТОi ТМn ... Аn УУn ТОn Рис. 11.3. Функциональная схема распределенной гибкой производственной системы Групповое управление в робототехнических системах 207 Технологические модули, помимо основного технологического оборудования со своими устройствами управления, технологических приспособлений и оснастки, имеют командное устройство (А), называемое администратором. Функции администратора — принимать заказы на выполнение очередной операции, запрашивать у соответствующих функциональных модулей необходимое для этого материальное и информационное обеспечение, затем, после начала выполнения операции, определять через администраторов других технологических модулей, на каком из них следует продолжить изготовление изделия по окончании операции на своем модуле. При этом учитывается загрузка модулей и особенности выполняемых на них операций. В этой системе управления отсутствует единое планирование и диспетчеризация. Соответственно, исключается возможность заблаговременного синтеза и оптимизации планов производства. Последовательность изготовления каждого изделия определяется спонтанно в ходе самого производственного процесса. Здесь функциональные модули, реализующие функции центра, скорее обслуживают непосредственных производителей — технологические модули, чем управляют ими. Такая структура отличается высокой надежностью. Сфера ее оптимального с точки зрения экономической эффективности применения — это условия случайного потока заявок на входе. Одной из наиболее сложных задач группового управления является управление группой мобильных роботов на местности и в других средах (вода, воздух, космос), особенно в условиях организованного группового противодействия (борьба двух групп). Стратегия и тактика решения таких задач интенсивно исследуются и отрабатываются, в частности, на различных групповых играх роботов (футбол и т. п.), на компьютерных и физических моделях [15]. Развитие компьютерных сетей вызвало их использование и в групповом управлении роботов в виде сетевых систем управления, в частности, с широким применением мультиагентных технологий. Каждый робот при этом представляется агентом сети с некоторым центром, который задает общие цели, определяет состав требующейся группы роботов, их функции, планирует работу группы, контролирует и корректирует их поведение. В свою очередь роботы-агенты, обмениваясь информацией, обеспечивают децентрализованную координацию действий. Особенно интенсивно эти работы развиваются в мини- и микроробототехнике. Важным их направлением является развитие и исследование коллективного интеллекта и разума, подобных тем, на чем основано поведение уже упоминавшихся ранее колоний муравьев и пчел. 208 Глава 11 ГЛАВА 12 АППАРАТУРА УПРАВЛЕНИЯ РОБОТОВ 12.1. Развитие устройств управления роботов Системы управления роботов и их аппаратное обеспечение развиваются неизолированно от систем управления объектов других типов. Устройства управления первых роботов и их приводы были заимствованы из станкостроения. Поэтому перед рассмотрением эволюции аппаратуры управления роботов остановимся на этапах развития устройств числового программного управления (УЧПУ) станков, как предшественников этой аппаратуры. Станки с ЧПУ появились в 1950-е годы. Это был первый и, как показало будущее, решающий шаг в развитии идеи гибкой автоматизации. Первые системы ЧПУ для станков, созданные в Массачусетском технологическом институте США, программировались обучением и управлялись от ЭВМ с записью управляющих программ на перфоленте и последующей передачей их на станки. Следующий, второй, этап их развития в 1960-е годы — это прямое дистанционное централизованное управление несколькими станками от одной ЭВМ в режиме разделения времени. Управляющие программы при этом записывались уже на магнитных носителях (на магнитной ленте, диске и т. п.). Однако доля станков с ЧПУ оставалась еще очень малой — не более 0,1 %. Третий этап связан с революционным скачком, который произошел в 1970-е годы с появлением микропроцессоров. На их основе были созданы компьютерные УЧПУ для управления отдельными станками. При этом резко снизилась стоимость УЧПУ — с 50% от общей стоимости станка до 20% и менее. Одновременно резко повысилась надежность систем управления, в том числе благодаря переходу от дистанционного централизованного управления по кабелю к децентрализованному автономному управлению. Четвертый этап развития УЧПУ — это переход к иерархическим системам комбинированного управления, в которых местные компьютерные УЧПУ отдельных станков объединены централизованной системой управления от общей ЭВМ. Функции такой ЭВМ — групповое управление всем производственным комплек- 210 Глава 12 сом, содержащим эти станки, включая планирование, хранение управляющих программ, контроль отказов и другие общесистемные функции. Современная тенденция развития групповых систем управления, что уже отмечалось в главе 11, — это развитие распределенных систем ЧПУ путем постепенного уменьшения функций центрального управления с передачей их местным УЧПУ. У первых промышленных роботов устройства управления конструктивно обычно размещались на общем основании робота. В дальнейшем они стали выполняться в виде отдельных шкафов (стоек) или настольных конструкций. Это увеличило эффективно используемую часть рабочей зоны манипуляторов робота, а также повысило безопасность персонала. Устройства управления роботов вначале создавались для каждого конкретного робота свои. Затем появились унифицированные устройства управления, предназначенные для роботов с определенными типом приводов (пневматических, гидравлических, электрических) и способом управления. Устройства группового управления прежде всего были созданы для роботов с простым цикловым управлением. На рис. 12.1 показано одно из первых отечественных устройств группового циклового управления, которое имеет 512 управляющих выходов с возможностью организации локальной сети. Рис. 12.1. Унифицированное устройство группового циклового программного управления Гранит КМС-2 Первые отечественные унифицированные устройства дискретного позиционного программного управления были построены как синхронный микропрограммный автомат. Основным программным носителем служил кассетный накопитель на магнитной ленте. Программирование осуществлялось методом обучения с помощью выносного пульта и с записью в блоке оперативной памяти. Аппаратура управления роботов 211 В первых устройствах непрерывного (контурного) управления программирование тоже осуществлялось методом обучения путем перемещения рукой оператора рабочего органа манипулятора. На рис. 12.2 показана одна из модификаций такого унифицированного устройства управления, построенного на базе микроЭВМ. Как выглядели аналогичные устройства управления иностранных фирм, можно увидеть на рис. 8.1. Рис. 12.2. Унифицированное устройство непрерывного (контурного) программного управления УКМ-7728 Опыт применения первых серийных устройств управления промышленных роботов и быстрое расширение областей применения роботов привели к постепенному формированию следующих тенденций в развитии этих устройств: унификация на уровне основных компонентов вплоть до модульного построения как аппаратного, так и программного обеспечения систем управления (принцип модульного построения роботов и их аппаратуры управления будет рассмотрен в разд. 13.3 главы 13); децентрализация управления с переходом к распределенным системам управле- ния. 212 Глава 12 Указанные перспективы развития устройств управления получили развитие и реализацию после появления микропроцессоров в качестве их основного унифицированного компонента. С этого и началось быстрое развитие децентрализованных и распределенных систем управления. 12.2. Современные устройства управления средств робототехники и тенденции их развития Типовая схема современного микропроцессорного устройства управления роботом состоит из нескольких микропроцессоров, каждый из которых управляет одним или несколькими приводами, и центрального микропроцессора на втором уровне управления, осуществляющего совместное управление ими. Такой центральный микропроцессор может быть заменен персональным компьютером соответствующего исполнения. На нижнем уровне управления отдельными приводами находится типовой усилитель мощности — это широтно-импульсный модулятор (ШИМ), обеспечивающий наибольшие КПД и быстродействие. Одна из тенденций развития таких структур управления связана именно с совершенствованием решения задач совместного группового управления приводами. К этим задачам относится решение обратной задачи динамики — вычисление qз(t) по xрз(t). При довольно сложной кинематике манипулятора для решения этой задачи даже на основе обратной задачи кинематики может оказаться недостаточно одного микропроцессора. Тем более это относится к быстродействующим манипуляторам с непрерывным управлением, для которых требуется решать обратную задачу динамики. Отсюда возникает необходимость использования на втором уровне управления многопроцессорных структур с распараллеливанием решения этой задачи. Другая задача второго уровня управления — общесистемная динамическая коррекция в виде последовательной коррекции типа компенсатора, перекрестных связей, компенсирующих взаимовлияние приводов, и компенсации изменений полезной нагрузки на рабочем органе манипулятора. Решение этой задачи также требует соответствующих вычислительных мощностей и, следовательно, дополнительных микропроцессоров. В устройствах управления очувствленных роботов реализация описанных в главе 9 уровней управления, включая обработку сенсорной информации и выполнение других функций адаптивного и интеллектуального управления, осуществляется отдельными микропроцессорами. Выбор числа микропроцессоров для этих уровней и синтез алгоритмов их совместной работы выполняется, прежде всего, исходя из требования функционирования системы в реальном масштабе времени. Развитие самой микропроцессорной базы этих систем идет по пути увеличения разрядности и емкости встроенной постоянной памяти. Опыт развития и все более широкого использования унифицированных устройств управления, основанных на серийных микропроцессорах общепромышленного Аппаратура управления роботов 213 применения, естественным образом породил следующий этап развития устройств управления роботов, основанный на создании специальных микропроцессорных функциональных модулей. С их помощью стало возможным не только собирать традиционные типы устройств управления для отдельных роботов (причем уже не унифицированные, а соответствующие без избыточности индивидуальным особенностям каждого робота), но и создавать из таких модулей, объединенных локальными сетями, распределенные системы группового управления роботов и целых технологических комплексов. Преимущества такого решения были рассмотрены ранее. В настоящее время этот принцип построения распределенных систем управления из модулей, объединенных локальными сетями, реализован многими ведущими в области создания систем управления роботов и робототехнических систем фирмами. В число типовых модулей входят контроллеры обработки сигналов сенсоров, сетевые контроллеры для подключения к локальной ceти, интерфейсы для связи с оператором и другими системами, а также силовые преобразователи и источники питания. К ним предлагаются локальные сети различного уровня. Принципы построения подобных распределенных модульных систем управления крупных технологических комплексов были рассмотрены в главе 11. Программное обеспечение (системное, прикладное и инструментальное) рассмотренных систем управления является иерархическим, как и структура самой системы управления (см., например, рис. 9.1), и модульным, в соответствии с ее аппаратной реализацией. Его основой является иерархия языков, включающая в общем случае языки следующих уровней: языки общения человека-оператора с роботом через интеллектуальный интер- фейс; проблемно-ориентированные языки для описания выполняемых технологиче- ских операций в координатах рабочей зоны робота; роботоориентированные языки для описания движений самого робота; языки элементарных движений; языки управления отдельными приводами. Одна из актуальных задач развития программного обеспечения — это повышение общности языка верхнего уровня, т. е. языка пользователя, до уровня профессионального языка технолога или другого специалиста, эксплуатирующего робототехнические системы, с тем, чтобы от них не требовалось специальных знаний по программированию таких систем. Новым направлением в аппаратном обеспечении систем управления роботов стал переход к нейронным структурам. Уже первый опыт их применения позволил существенно превзойти быстродействие современных распределенных систем управления, в частности, в обработке сенсорной информации и планировании поведения. Создание подобных однородных структур и необходимой для них элементной базы является одним из важнейших направлений развития систем управления роботов. 214 Глава 12 Для управления роботами человеком-оператором в устройствах управления роботов обычно предусмотрены встроенные или небольшие переносные пульты, предназначенные в основном для целей программирования. Для управления роботами человеком-оператором с помощью задающих рукояток и в режиме супервизорного управления применяются специальные пульты: напольные, настольные, а для мобильных роботов — носимые. На рис. 12.3 представлены пульты операторов мобильных роботов, подобных показанным в разд. 3.4. Рис. 12.3. Пульты операторов мобильных роботов (ЦНИИ РТК, Россия) ГЛАВА 13 ПРОЕКТИРОВАНИЕ СРЕДСТВ РОБОТОТЕХНИКИ 13.1. Особенности проектирования средств робототехники Проектирование технических систем — это процесс создания проекта нового изделия. Проект — это совокупность технических документов, по которым изделие изготавливается и эксплуатируется. Процесс проектирования стандартизирован и состоит из следующих этапов: разработка технического задания; предварительное проектирование (разработка технического предложения); эскизный проект; технический и рабочий проекты (разработка полного комплекта технической документации на изделие). Первые два этапа относятся к научно-исследовательским работам (НИР), а остальные — к опытно-конструкторским (ОКР). Процесс проектирования изделия не заканчивается рабочим проектом, а продолжается в течение всего времени производства и эксплуатации изделия — всего его «жизненного цикла». В течение этого времени изделие окончательно «доводится», его технический уровень путем корректировки технической документации повышается [18]. Порядок и методы проектирования средств робототехники регламентируются комплексом нормативно-технических документов (НТД), которые включают ГОСТы (по классификации, терминологии и обозначениям, основным параметрам) и методические указания (по техническим требованиям, методам испытаний и правилам приемки, по оценке экономической эффективности). Соответствующие документы имеются и по основным компонентам роботов: устройствам управления, приводам, захватным устройствам, околороботной оснастке. На первом этапе проектирования робота (при разработке технического задания), прежде всего, необходимо в рамках определения технических требований к нему и последующего анализа путей их реализации исследовать взаимодействие робота 216 Глава 13 с другим работающим совместно технологическим оборудованием и с объектами манипулирования. Цель исследования — выявление возможностей, позволяющих за счет достаточно несущественных их изменений облегчить требования к роботу и тем самым получить общую технико-экономическую выгоду для всей системы совместно работающих машин. Наибольший технико-экономический эффект при этом может быть достигнут, когда все оборудование проектируется одновременно с роботом. Чаще всего это имеет место при проектировании роботов, выполняющих основные технологические операции. Одновременно с той же целью необходимо исследовать возможности создания так называемой околороботной оснастки и других средств упорядочения и упрощения внешней среды робота: устройств подачи и позиционирования объектов манипулирования, их маркировки и т. п. Только после такого рассмотрения взаимодействия робота с внешней средой и оптимизации технических требований к роботу и объектам этой среды следует переходить к проектированию собственно робота. Основной принцип здесь, как и при проектировании других технических систем, — декомпозиция, т. е. разбиение всей задачи на несколько решаемых параллельно более простых подзадач. В соответствии с этим принципом, на первом этапе проектирования, после составления функциональной схемы робота, должно быть проведено его разделение на три части: механическую систему, аппаратуру управления и программное обеспечение, проектирование которых требует специалистов разного профиля. В основе решения такой задачи лежит разделение функций робота и технических требований к нему между этими тремя взаимосвязанными частями. Задача неоднозначна и наиболее ответственна, поскольку ее решение в значительной степени предопределяет результат всей дальнейшей работы по созданию робота. При указанном распределении функций робота выделяют, прежде всего, функции, которые полностью или в основном определяются одной из этих трех частей и, соответственно, приписываются им. Например, грузоподъемность и геометрия рабочей зоны определяются механической системой, параметры энергопитания и диапазон температуры внешней среды существенны, в основном, для аппаратуры управления, языки программирования имеют значение только для программного обеспечения. Остальные функции необходимо оптимально распределить между частями робота на основании определенных выбранных критериев. Взаимовлияние между некоторыми из этих функций дополнительно усложняет задачу и может привести к тому, что локальное улучшение характеристик одной из частей робота ухудшит эффективность робота в целом. Например, известная взаимосвязь точности и быстродействия не позволяет независимо распределять требования к каждому из этих параметров между частями робота. Принцип декомпозиции, конечно, существенно облегчает процесс проектирования, но одновременно он ограничивает технический уровень создаваемой техники, поскольку игнорирует взаимодействия независимо проектируемых частей системы. Оптимальный подход к проектированию требует системного подхода к роботу как Проектирование средств робототехники 217 к единому целому на основе общих критериев. Это позволяет обеспечить оптимальное распределение технических требований к роботу между этими его частями. Характерный пример — задача минимизации массы манипуляторов. Переход от традиционного расчета механической части на жесткость с ограничением упругих деформаций звеньев к расчету только на прочность со снятием этих ограничений позволяет примерно втрое уменьшить массу механической системы манипуляторов. Однако возникающая при этом гибкость конструкции и вызванная ею колебательность существенно осложняют задачу управления движением таких манипуляторов и, соответственно, технические требования к устройству управления. 13.2. Методы проектирования средств робототехники В основе методов проектирования техники лежит унификация. Проектирование нового изделия — это всегда противоречивая задача для разработчика: с одной стороны существует естественное стремление использовать все последние в данной области достижения науки и техники, с другой, — этому препятствуют ограничения по срокам, стоимости, материальным ресурсам и др., которые обычно оговариваются в технических требованиях к создаваемому изделию. Выход здесь один — компромисс в виде оптимальной преемственности с ранее созданными подобными изделиями и их компонентами. Основными средствами для этого и служат, как известно, стандартизация и унификация. Иногда в техническом задании прямо оговаривается степень (процент) унификации. Проблема унификации для робототехники имеет большое значение. Сфера применения роботов быстро расширяется, охватывая все новые области человеческой деятельности. Соответственно, быстро растет требуемая их номенклатура. Уже сегодня количество требуемых типов роботов только общепромышленного применения измеряется сотнями. В связи с этим, одной из важнейших задач робототехники является комплексная унификация роботов и, прежде всего, их компонентов. По определению международной организации по стандартизации, стандартизация — это установление и применение правил упорядочения деятельности в определенной области. Сюда, в частности, входит установление единиц величин, терминов и обозначений, требований к продукции, технологическим процессам, технике безопасности. К нормативно-техническим документам по стандартизации, прежде всего, относятся стандарты и методические указания. Унификация — это наиболее эффективный метод стандартизации, заключающийся в рациональном сокращении числа изделий одинакового назначения с целью повышения экономичности производства и эксплуатации, повышения качества. В робототехнике унификация развивается по трем уровням: для компонентов роботов, для собственно роботов и для технологических комплексов с роботами. Отработанные и серийно выпускаемые унифицированные компоненты — по существу, единственно возможная основа развития робототехники в условиях упомянутого 218 Глава 13 неограниченного роста номенклатуры роботов и необходимости оперативно создавать, осваивать в производстве и эксплуатации новые типы роботов и их модификаций. Создание унифицированных функциональных компонентов роботов (приводов, устройств управления и т. д.) явилось первым этапом унификации в области робототехники. Следующим этапом стала унификация этих компонентов в совокупности на основе модульного принципа построения [18]. Сущность этого принципа заключается в построении механических, аппаратных и программных частей робота из унифицированных конструктивно и по соединениям согласования частей — модулей. Такие модули, как правило, унифицированы по функциональному назначению и по условиям сопряжения друг с другом: по конструкции, входным и выходным параметрам и т. д. Система модулей строится по иерархическому принципу — сложные модули состоят из более простых. Например, привод, выполненный в виде модуля, является готовой конструктивной частью для сборки манипуляторов и устройств передвижения, приспособленной для соединения с модулями другого функционального назначения. При этом, в свою очередь, он тоже состоит из более мелких модулей, которые позволяют собирать различные модификации этого типа привода. Модульный принцип построения роботов позволяет наиболее легко создавать их модификации и новые типы на базе одних и тех же конструктивных частей. При этом в каждом конкретном случае имеется возможность выбрать оптимальную степень кинематической, аппаратной и программной избыточности, стоимость и распределение функций между роботом и работающим вместе с ним технологическим оборудованием (вплоть до конструктивного объединения отдельных модулей робота с этим оборудованием). В связи с рассматриваемым модульным принципом построения роботов возникает вопрос: существует ли альтернатива этому принципу сегодня или в перспективе? Такой альтернативой может стать идея создания универсальных роботов. Собственно говоря, именно эта идея наиболее соответствует исходной идее робота как универсального заменителя человека. Техническая база для создания систем управления таких роботов уже имеется — это микропроцессоры, которые сами по себе представляют яркий пример реализации идеи универсального программно перестраиваемого устройства широкого применения. Однако, в отличие от микроэлектроники, в робототехнике в целом этот путь, по крайней мере сегодня, экономически невыгоден, поскольку стоимость роботов резко возрастает при увеличении их функциональных возможностей и грузоподъемности. Вместе с тем, сейчас отчетливо прослеживается тенденция перехода ко все более функционально сложным роботам с техническим зрением и искусственным интеллектом. Идею модульного построения таких роботов можно трактовать как экономически оптимальный путь создания функциональной избыточности, но не в отдельном роботе, а в рамках всего арсенала унифицированных его частей — модулей. Таким образом, модульный принцип построения роботов является не альтернативой сверхуниверсальным роботам, а, наоборот, формой реализации этой идеи, но применительно не к отдельному роботу, а ко всему их множеству. Проектирование средств робототехники 219 Идея модульного построения роботов впервые была сформулирована и реализована в ЦНИИ РТК в 1980–1982 гг. Здесь была создана первая система модулей для построения промышленных роботов [1]. Высокая эффективность применения этих модулей была затем опробована при создании роботов для работ по ликвидации последствий аварии на Чернобыльской АЭС в 1986 г. Только модульный подход позволил за 2–3 месяца разработать и поставить на станцию более 15 роботов различного назначения, собранных из ранее отработанных унифицированных модулей. В настоящее время модульный принцип построения роботов успешно используется большинством ведущих фирм, их производящих. Наряду с модульным принципом существуют и другие принципы построения техники, тоже основанные на идее унификации, — это принципы базового изделия и агрегатного построения. Первый принцип заключается в создании гаммы (семейства) изделий, повторяющих конструкцию первоначально отработанного базового изделия, но в других габаритах и с другой грузоподъемностью. Принцип агрегатного построения заключается в создании различного назначения и компоновок изделий из унифицированных сборочных функциональных единиц — агрегатов (агрегатные станки, агрегатные системы в приборостроении и вычислительной технике). Оба этих принципа построения технических систем нашли применение и в робототехнике и могут рассматриваться как частные случаи модульного принципа. На этих принципах, в частности, создаются серийно выпускаемые, но конструктивно отдельные модули, что, естественно, означает некоторую их массогабаритную избыточность. 220 Глава 13 ГЛАВА 14 - РОБОТОТЕХНИЧЕСКИЕ СИСТЕМЫ В ПРОМЫШЛЕННОСТИ 14.1. Классификация технологических комплексов с применением роботов Задача робототехники, наряду с созданием собственно роботов и других средств робототехники, заключается и в создании технических систем и комплексов, основанных на этих средствах. Следующие главы книги посвящены этой теме. С ней связаны два термина: автоматизация и роботизация. Автоматизация определяет создание и применение автоматических систем управления техникой, включая, в частности, замену человека в этом управлении. Роботизация — это применение средств робототехники для выполнения различных технологических операций, в том числе и с заменой рабочих, и для управления участвующим технологическим оборудованием. Здесь существует два понятия: робототехнические и роботизированные системы (комплексы). В робототехнических системах роботы выполняют основные операции, определяющие их назначение, а в роботизированных — вспомогательные, обслуживая основное технологическое оборудование. Именно с робототехническими системами (РТС) связано качественное развитие робототехники с переходом на принципиально новую умную технику и новые технологии. Достаточно сопоставить летательные аппараты, снабженные автопилотами, с современными беспилотными летательными аппаратами (БЛА). Аналогичного результата следует ожидать и от подводной до космической техники всех размерностей. Как было отмечено в главе 1 при изложении истории развития робототехники, несмотря на непрерывное расширение сферы применения роботов, основной областью этой сферы пока по-прежнему остается промышленность, — прежде всего, машиностроение и приборостроение. Здесь появились первые роботы и сосредоточено до 80% всего мирового парка роботов. Напомним, что роботы, применяемые в промышленности, получили наименование промышленных роботов (ПР). Начнем рассмотрение применения робототехники в промышленности с классификации технологических комплексов. Такая классификация, применительно к машиностроению, представлена в табл. 14.1. Воспользуемся ею для рассмотрения применения в этих комплексах роботов. 222 Глава 14 Таблица 14.1. Классификация технологических комплексов с роботами № п/п 1. Признак Наименование Тип подразделения Технологическая ячейка Участок Линия Цех 2. Вид технологического процесса Механообработка Холодная штамповка Ковка Литье Прессование пластмасс Термическая обработка Сварка Транспорт Контроль и испытания и т. д. 3. 4. Тип выполняемых роботами технологических операций Серийность и номенклатура продукции Выполняемые роботами технологические операции: • основные; • вспомогательные С определенным размером партии выпускаемой продукции без переналадки комплекса. С определенным перечнем номенклатуры выпускаемой продукции 5. Компоновка комплекса Линейная Круговая Линейно-круговая По площади Объемная 6. Тип управления Централизованное Децентрализованное Комбинированное 7. Участие человека В выполнении технологических операций: • основных; • вспомогательных. В управлении Робототехнические системы в промышленности 223 Тип производственного подразделения — здесь классификационным признаком служит количество выполняемых технологических операций: • простейшим типом такого подразделения является технологическая ячейка (ТЯ). В ней выполняется всего одна основная технологическая операция (помимо вспомогательных). При этом количество единиц технологического оборудования и ПР в составе ТЯ не регламентируется. В частности, в ТЯ может совсем отсутствовать технологическое оборудование, помимо ПP, когда основную операцию выполняет ПР, или, наоборот, могут отсутствовать самостоятельные ПР, когда они объединены с основным технологическим оборудованием; • следующим, более крупным, типом является технологический участок (ТУ). На нем выполняется несколько технологических операций. Эти операции могут быть одинаковыми или различными. Если различные операции технологически последовательно связаны, то такой участок представляет собой технологическую линию (ТЛ). Технологический участок обычно состоит из ТЯ, но может и не иметь их. Например, участок может включать несколько единиц технологического оборудования, обслуживаемых одним ПР: неподвижным с размещением оборудования вокруг ПР или мобильным, перемещающимся вдоль ряда единиц оборудования; • следующим типом комплекса является цех, состоящий из нескольких участков. В состав участков и цехов, помимо технологического оборудования, входят еще склады, транспорт (в том числе и на базе ПР) и системы контроля качества продукции. Классификация по виду технологического процесса — она не исчерпывается приведенным в табл. 14.1 перечнем типовых для современного состояния областей применения ПР в машиностроении. Классификация по типу выполняемых роботами технологических операций — здесь определены два уже названных основных варианта: ПР выполняют основные технологические операции (сборку, сварку, окраску и т. д.) или вспомогательные операции по обслуживанию основного технологического оборудования. Серийность и номенклатура продукции — серийность определяется объемом партий продукции, которые могут изготавливаться без переналадки комплекса, а номенклатура — широтой перечня выпускаемых видов продукции. Оба эти показателя имеют существенное влияние на эффективность применения ПР. В частности, каждый технологический комплекс характеризуется предельными значениями этих параметров, вне рамок которых он оказывается экономически невыгодным вплоть до целесообразности перехода от гибких комплексов к специальным автоматам (при большой серийной и узкой номенклатуре) или даже к использованию рабочих вместо ПР (в противоположном предельном случае единичного производства). 224 Глава 14 Классификация по типу компоновки комплекса — в табл. 14.1 приведены основ- ные типы таких компоновок. При простой линейной компоновке оборудование располагается в один ряд (по линии), а при наиболее сложной объемной компоновке — на нескольких этажах (уровнях). Классификация по типу управления — она включает рассмотренные ранее цен- трализованный, децентрализованный и комбинированный способы управления. Централизованное управление осуществляется устройством группового управления, а децентрализованное реализуется с помощью местных устройств управления, связанных друг с другом для координации. Классификация по степени участия человека — в табл. 14.1 отмечены два вари- анта участия человека: когда человек непосредственно выполняет некоторые технологические операции и когда он участвует в управлении комплексом. 14.2. Компоновка технологических комплексов с роботами На рис. 14.1 показан пример простой линейной компоновки роботизированной технологической линии. В ней предметы производства передаются от одной ячейки к другой непосредственно входящими в них вспомогательными ПР. Рис. 14.1. Схема однопоточной роботизированной технологической линии холодной штамповки с линейной компоновкой: ТО — основное технологическое оборудование; ПР — промышленный робот; М — магазин поштучной выдачи заготовок На рис. 14.2 показан вариант линейной компоновки линии, в которой транспортные связи между составляющими ее ячейками осуществляются с помощью специальных транспортных устройств. Это дает возможность территориально развязать отдельные ячейки и тем самым облегчить компоновку всего комплекса. Робототехнические системы в промышленности Рис. 14.2. Схема однопоточной роботизированной технологической линии с транспортным устройством: Тр — транспортное устройство Рис. 14.3. Схема роботизированного технологического участка механической обработки с круговой компоновкой Рис. 14.4. Схема роботизированного технологического участка механической обработки с линейной компоновкой, обслуживаемого мобильным промышленным роботом: МПР — мобильный промышленный робот; Т — трасса промышленного робота 225 226 Глава 14 Рис. 14.5. Схема роботизированного технологического участка механической обработки с компоновкой по площади: АС — автоматизированный склад с подвижными автооператорами-штабелерами А; Т — трасса транспортной системы с мобильными промышленными роботами МПР Робототехнические системы в промышленности 227 Показанные на рис. 14.1 и 14.2 варианты компоновки характерны для технологических процессов с малым циклом обработки предметов производства на технологическом оборудовании (единицы, десятки секунд), что свойственно, например, процессам холодно-листовой штамповки. Для технологических процессов с большей длительностью обработки на технологическом оборудовании часто применяют другой тип построения комплексов с обслуживанием одним ПР нескольких единиц технологического оборудования. На рис. 14.3 показан вариант такого комплекса с круговой компоновкой, в котором один ПР обслуживает три металлорежущих станка, расположенных вокруг него. Иная компоновка линии механообработки с применением подвижного ПР, который может быть напольным или подвесным, приведена на рис. 14.4. На рис. 14.5 показан пример более сложного роботизированного технологического комплекса — участка механообработки с линейно-круговой компоновкой. В приведенных примерах ПР выполняют вспомогательные операции по обслуживанию основного технологического оборудования. На рис. 14.6 показана схема сборочной линии с линейной компоновкой, на которой ПР выполняют основные операции. Рис. 14.6. Схема сборочной робототехнической линии с линейной компоновкой: Тр — шаговый транспортер; К — кассеты 14.3. Гибкие производственные системы Рассмотрим теперь особенности применения средств робототехники при создании комплексно-автоматизированных производств. Их высшей формой являются гибкие автоматизированные производства (ГАП). Такие производства позволяют быстро переходить на выпуск новой продукции, осуществлять ее модернизацию, совершенствовать технологию производства, прежде всего, путем смены управляющих программ. Создание и внедрение ГАП выходит за рамки робототехники, однако роботы являются важным универсальным компонентом таких производств. На рис. 14.7 приведен типовой состав ГАП. Как здесь показано, в наиболее полном виде такое производство состоит из двух частей: гибкой производственной системы (ГПС), которая непосредственно реализует технологический процесс изготовления изделий (в разд. 11.3 была рассмотрена ее система управления); 228 Глава 14 автоматизированных систем проектирования подлежащих изготовлению изде- лий и технологической подготовки их производства, реализуемых с помощью показанных в нижней части рисунка автоматизированных рабочих мест (АРМ). Эти части объединены общей автоматизированной системой управления (АСУ) на базе локальных компьютерных сетей. Предел, к которому стремится процесс гибкой автоматизации производства, можно кратко определить так: автоматическое производство изделий сколь угодно малыми партиями; себестоимость и производительность, близкие к достигнутым в современном массовом производстве; Рис. 14.7. Состав гибкого автоматизированного производства Робототехнические системы в промышленности 229 практически безлюдное производство — количество работающих по сравнению с существующим меньше на 2 порядка; комплексная автоматизация всех частей производства, включая технологические процессы, подготовку производства, разработку документации на выпускаемые изделия, планирование и управление производства в целом. Таким образом, в максимально полном исполнении ГАП на его вход поступают технические задания на очередное изделие, а на выходе у него — готовая продукция. При этом весь процесс может происходить непрерывно на основе машинных носителей информации, т. е. без бумажной документации. Для мелкосерийного производства степень его гибкости характеризуется количеством типов изделий, которые могут изготавливаться путем смены только программ. Основным принципом построения гибких производств является компоновка их из комплектно-поставляемых унифицированных модулей. В соответствии с составом ГАП, показанным на рис. 14.7, основными такими модулями являются технологические модули-ячейки, модули транспортные (в том числе на базе транспортных навесных и напольных роботов), складские (в том числе с роботами-штабелерами), модули контроля качества продукции и технической диагностики оборудования. Последние модули образуют систему автоматического контроля качества, без которой невозможна автоматическая работа всего комплекса. 230 Глава 14 ГЛАВА 15 ПРОМЫШЛЕННЫЕ РОБОТЫ НА ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЯХ 15.1. Классификация технологических комплексов с роботами на основных технологических операциях Как было отмечено в главе 1, с начала развития современной робототехники по мере совершенствования роботов происходит устойчивый рост доли промышленных роботов (ПР), задействованных на основных технологических операциях. В 1980– 1981 гг. их доля в общем парке роботов превысила 50%. Опыт показывает, что, хотя внедрение ПР на основных операциях требует значительно бо́льших (в 3–4 раза) затрат, чем на вспомогательных операциях, именно здесь достигается наибольшая эффективность применения ПР при высвобождении рабочих. Велик и социальный эффект в связи с вредностью для человека ряда таких операций (например, окраска, сварка) или с их монотонностью (например, сборка на конвейере). В машиностроении основными типами технологических комплексов, в которых ПР получили широкое применение на основных операциях, являются комплексы сборки, сварки, нанесения покрытий, шлифовки, зачистки, клепки. Помимо машиностроения, к таким комплексам относятся также комплексы для бурения в горном деле, монтажа огнеупоров в металлургии, монтажных и облицовочных работ в строительстве, упаковки штучной продукции в легкой и пищевой промышленности. 15.2. Сборочные робототехнические комплексы Этот тип робототехнических комплексов по своему значению является, пожалуй, наиболее важным. Сборочные операции в машиностроении составляют до 50% себестоимости изделий, а в приборостроении еще больше. Вместе с тем, степень автоматизации сборочных работ сегодня весьма низка в связи с ограниченными возможностями традиционных средств автоматизации в виде специальных сборочных 232 Глава 15 автоматов. Такие автоматы применимы, главным образом, в массовом производстве, в то время как, например, в машиностроении до 80% продукции относится к серийному и мелкосерийному производству. Поэтому создание гибких сборочных комплексов на базе ПР является одним из основных направлений автоматизации сборочных операций. К сборочным операциям относятся механическая сборка, электрический монтаж, микроэлектронная сборка. Каждая из этих операций принципиально может быть выполнена с помощью ПР, но не всегда это целесообразно. В тех, например, случаях, когда требуется перемещение по одной координате, более простым решением может быть применение устройств типа толкателей. В других случаях могут применяться специальные ориентаторы и простые однопрограммные механические руки. Роль ПР в сборочных комплексах, наряду с более простыми и специальными средствами автоматизации, различна. Зависит она, прежде всего, от конкретных требований к гибкости комплекса, что, в свою очередь, определяется серийностью выпускаемой продукции. Поэтому рассмотрим роль ПР в сборочных комплексах, которые можно классифицировать следующим образом, — в зависимости от объема выпускаемой продукции, начиная с массового производства и заканчивая единичным: 1. Специальные сборочные автоматы для массового и крупносерийного производства с возможным применением простых автоматических манипуляторов на вспомогательных и отдельных основных сборочных операциях. 2. Робототехнические сборочные комплексы для крупносерийного и серийного производства, в которых сборочные операции выполняют специальные ПР с цикловым управлением. 3. Робототехнические сборочные комплексы для крупносерийного и серийного производства на базе универсальных и специализированных ПР, каждый из которых может осуществлять различные сборочные операции за счет смены инструмента (в том числе, непосредственно и в процессе сборки изделия). 4. Робототехнические сборочные комплексы для серийного производства, в которых вся сборка выполняется одним универсальным ПР. 5. Робототехнические сборочные комплексы для серийного производства с участием человека в управлении ПР или в выполнении им отдельных операций вручную. Включение человека непосредственно в процесс сборки может вызываться либо экономическими соображениями, либо технической невозможностью автоматизировать отдельные сложные операции (например, некоторые регулировочные и настроечные действия), либо необходимостью оперативного подключения человека в аварийных ситуациях, когда автомат по какой-то причине не справляется с заданием, либо, наконец, временно на этапе освоения сборки нового изделия (в том числе, и как один из способов программирования методом обучения). Примерами специальных сборочных автоматов, указанных в пункте 1 приведенной классификации, являются автоматы для монтажа печатных плат и сборочные ро- Промышленные роботы на основных технологических операциях 233 торные линии, используемые в массовом и крупносерийном производствах. Средства робототехники находят здесь ограниченное применение в основном для обслуживания (операции загрузки-выгрузки). На рис. 15.1 показан участок одного из первых отечественных робототехнических сборочных комплексов производства механических наручных часов на базе специальных ПР, относящийся к пункту 2 приведенной классификации. На транспортной системе закреплено приспособление-спутник, которое перемещается от позиции к позиции с фиксацией через равные промежутки времени. Сборка осуществляется на всех позициях одновременно с последующим перемещением приспособленияспутника на очередной шаг. Установка оснащена специальными пневматическими ПР с приспособлениями, сменяемыми в зависимости от марки собираемых часов. Сборочные линии, из которых состоит комплекс, включают транспортную систему, специальные ПР, пульт управления, вибробункеры, питатели, а также различную оснастку и приспособления. Детали и узлы часов поступают на позиции сборки из вибробункеров в ориентированном положении. Применение таких комплексов позволило в 6–8 раз повысить производительность, улучшить качество сборки часов, ликвидировать монотонный ручной труд и поднять культуру производства. Рис. 15.1. Робототехническая сборочная линия массового производства наручных часов На рис. 15.2 показан пример сборочной робототехнической линии, построенной на базе универсальных ПР (пункт 3 приведенной классификации). Следующим типом робототехнических сборочных комплексов, которые оказываются экономически более выгодными при меньшей серийности производства, являются комплексы с ПР, последовательно выполняющими различные сборочные операции на одном рабочем месте вплоть до полной сборки целого изделия (пункт 4 приведенной ранее классификации). Такое построение комплекса существенно повышает его гибкость, позволяя программно изменять число сборочных операций без изменения количества используемых ПР, что неизбежно, когда каж- 234 Глава 15 Рис. 15.2. Робототехническая линия сборки автомобилей Volvo (Volvo, Швеция) дый ПР выполняет только одну операцию. В таких комплексах у ПР в ходе сборки при переходе от одной операции к другой многократно сменяются рабочие органы. На рис. 15.3 показан один из первых робототехнических комплексов, осуществляющих сборку на одном рабочем месте такого достаточно сложного изделия, как пылесос. Комплекс смонтирован на сборочном столе и включает два электромеханических манипулятора (1, 2) с восемью степенями подвижности (первый работает Рис. 15.3. Робототехнический комплекс сборки пылесосов (Hitachi, Япония) Промышленные роботы на основных технологических операциях 235 в вертикальной плоскости, а второй — в горизонтальной) и семь телевизионных камер. Три из них: α, β и γ — ориентированы вертикально, а четыре: A, B, C, D — горизонтально. Захватное устройство горизонтального манипулятора снабжено датчиками тактильными и усилия. Пылесос 3 собирается из трех узлов: фильтра 4, электродвигателя 5 и корпуса 6, которые поступают на сборку неориентированными. Близки к сборочным роботам и часто применяются вместе с ними роботы для контроля размеров — измерительные машины. Их рабочим органом является измерительный щуп, которым производится ощупывание контролируемого изделия. Обычно такие измерительные машины имеют прямоугольную систему координат и ЧПУ, обеспечивающее точность до единиц микрометров. На рис. 15.4 показан пример такой измерительной машины. Рис. 15.4. Координатно-измерительная машина (DEA, Италия) 15.3. Сварочные робототехнические комплексы Сварка — одна из технологических операций наиболее широкого применения ПР. Из многочисленных видов сварки ПР получили основное применение на контактной точечной и дуговой сварке. Контактная точечная сварка осуществляется путем нагрева места сварки импульсным электрическим током. Рабочими органами для выполнения такой операции являются сварочные клещи (см. рис. 7.1). Существуют сварочные ПР, у которых манипулятор заканчивается одним электродом, а вторым 236 Глава 15 электродом служит само свариваемое изделие. Пример такого робота приведен на рис. 15.5. Промышленные роботы для контактной точечной сварки имеют специальную конструкцию, которая предусматривает размещение сварочного трансформатора и токопроводящего кабеля, идущего от него к сварочным клещам. Сварочный трансформатор расположен обычно на манипуляторе ПР, в том числе и непосредственно в его рабочем органе. Грузоподъемность манипуляторов таких сварочных ПР составляет 20–30 кг. Управление ПР для контактной точечной сварки — дискретное позиционное. Устройство управления должно быть рассчитано на работу в условиях сильных электромагнитных помех, создаваемых импульсами сварочного тока. Рис. 15.5. Сварочный робот (KUKA, Германия) Наиболее широко контактная точечная сварка с помощью ПР применяется в автомобилестроении (сварка кузовов), судостроении и вагоностроении. На рис. 15.6 показан участок сварки кузовов автомобилей с помощью ПР. Дуговая сварка — более сложный технологический процесс, чем контактная точечная. Он требует осуществлять непрерывное перемещение сварочного электрода или горелки с определенной скоростью по сложной траектории, формирующей свариваемый шов, с одновременным поперечным их перемещением. Электрод при этом должен сохранять определенную ориентацию по отношению к плоскости шва. Грузоподъемность манипуляторов ПР для дуговой сварки меньше чем ПР для контактной точечной и не превышает 5–8 кг. Промышленные роботы для дуговой сварки часто комплектуются столом с несколькими угловыми степенями подвижности для размещения на нем свариваемых изделий и манипулирования ими перед ПР. Промышленные роботы на основных технологических операциях 237 Рис. 15.6. Участок точечной сварки роботами кузовов автомобилей В функции устройства управления ПР для дуговой сварки, помимо управления движением, входит также регулирование параметров режима сварки (тока дуги, притока газа и т. д.). Управление при этом должно быть адаптивным. Основные задачи адаптации: поиск начала шва, слежение за кромками свариваемых деталей и ориентация рабочего органа. Кроме того, адаптация требуется при регулировании технологических параметров собственно процесса сварки. Для контроля положения рабочего органа относительно кромок свариваемых деталей применяют контактные и магнитные датчики, ультразвуковые и оптические дальномеры, телевизионные системы. На рис. 15.7 показан робототехнический Рис. 15.7. Робототехнический сварочный центр для дуговой сварки (Motoman, Япония) 238 Глава 15 комплекс для дуговой сварки в комплекте с манипуляционным столом — сварочный центр. Есть и другие виды сварки: электронно-лучевая и лазерная. Первая осуществляется в вакууме путем перемещения по линии шва электронного пучка, создаваемого электронной пушкой. Этот вид сварки интересен тем, что, в отличие от обычных механических манипуляторов, здесь манипулирование производится электронным лучом с помощью отклоняющего магнитного или электрического полей. Существуют установки с перемещением не луча, а стола, на котором крепятся свариваемые детали. Робототехническим комплексам сварки близки комплексы для пайки и резки: дугой, лазерным лучом, плазмой. Последние, в частности, широко применяют для раскроя материала. 15.4. Робототехнические комплексы для нанесения покрытий Промышленные роботы широко применяются на операциях нанесения различных покрытий: лакокрасочных, защитных, упрочняющих, герметизирующих и т. п. Операции эти для человека не только физически тяжелы, но и вредны для дыхания. В большинстве случаев нанесение покрытий связано с применением взрыво- и пожароопасных веществ. Поэтому используемые на таких операциях ПР должны иметь взрывобезопасное исполнение. Для нанесения покрытий широко применяют пульверизаторы. На рис. 15.8 показан ПР с пульверизатором в качестве рабочего органа. Робот такого же назначения был показан на рис. 4.7. Управление такими Рис. 15.8. Робототехнический комплекс окраски кузовов автомобилей (Dürr, Германия) Промышленные роботы на основных технологических операциях 239 ПР — непрерывное (контурное). По сравнению со сварочными ПР, требование к точности управления при нанесении покрытий существенно ниже, а к быстродействию, наоборот, выше. Применяется в этих ПР и адаптивное управление с использованием системы технического зрения для определения контуров очередного изделия, на которое должно быть нанесено покрытие. Другим вариантом технологии нанесения покрытий является использование для этого электростатического поля. Такой способ обеспечивает более высокое качество покрытия и более экономичен. Однако высокое напряжение (десятки киловольт) создает дополнительную взрывоопасность, что ограничивает применение окрасочных ПР с подобного типа распылителями. Широкое применение получили средства робототехники для нанесения гальванических покрытий. Основная манипуляционная операция в этом случае — погружение в ванны деталей или корзин с деталями и перемещение их от одной ванны к другой. Операция эта выполняется с помощью простых однопрограммных автооператоров. На рис. 15.9 показана линия гальванопокрытий. Рис. 15.9. Линия гальванопокрытий с автооператорами Близки к процессу нанесения покрытий пескоструйная и дробеструйная обработки поверхностей. На этих операциях также нашли применение ПР с непрерывным управлением. Из других основных технологических операций, на которых используются ПР с непрерывным управлением, следует назвать шлифование, зачистку (например, отливок), обрубку облоя. 240 Глава 15 ГЛАВА 16 ПРОМЫШЛЕННЫЕ РОБОТЫ НА ВСПОМОГАТЕЛЬНЫХ ОПЕРАЦИЯХ 16.1. Классификация роботизированных технологических комплексов Одна из актуальных задач робототехники — замена рабочих, занятых на вспомогательных операциях. Хотя, как было отмечено, стоимость автоматизации вспомогательных операций в 3–4 раза ниже, чем основных, степень их автоматизации почти вдвое ниже. В результате сегодня около половины рабочих, занятых в промышленности, работают на таких наименее престижных и не требующих высокой квалификации ручных операциях. Роботизированные технологические комплексы (РТК), в которых ПР используются на вспомогательных операциях, — это прежде всего комплексы механообработки, штамповки, прессования пластмасс, горячей штамповки и ковки, литья под давлением, а также внутрицехового транспорта. 16.2. Роботизированные технологические комплексы механообработки Одна из важных областей применения ПР на вспомогательных операциях — обслуживание металлорежущих станков. Здесь ПР выполняют наиболее типичную вспомогательную операцию загрузки-разгрузки оборудования, т. е. установки обрабатываемой детали на станок и снятия ее по окончании обработки. Аналогичные операции осуществляют ПР и при обслуживании других видов технологического оборудования. Имеются еще и некоторые более специальные вспомогательные операции, выполняемые ПР, — такие как смазка пресс-форм, погружение деталей в жидкость, межоперационная транспортировка, штабелирование и т. д. Основным технологическим оборудованием, обслуживаемым роботами в механообработке, являются станки: токарные, сверлильные, фрезерные, зубообрабатывающие, шлифовальные и пр. К технологическому оборудованию предъявляются следующие требования: автоматический режим работы, согласуемость его системы управления с системой управления ПР, возможность доступа манипулятора ПР в зону установки детали на станке. 242 Глава 16 Вследствие значительного времени механообработки в таких комплексах, как уже отмечалось в разд. 14.2, широкое применение получило обслуживание одним ПР нескольких станков. Эти IIP перепрограммируются в среднем один раз в неделю. Средняя длительность цикла работы таких ПР — минуты. 16.3. Роботизированные технологические комплексы штамповки и литья под давлением Еще одной областью широкого применения ПР является холодная листовая штамповка. Объясняется это большим травматизмом обслуживающих прессы рабочих, достигающим 30%, и монотонностью этой работы, а также простотой применения на этих операциях ПР. Промышленный робот используется здесь, как и в механообработке, прежде всего, для выполнения операций загрузки-разгрузки. На рис. 14.1 и 14.2 были показаны основные компоновки РТК холодной штамповки. Особенностью применения ПР на холодной штамповке по сравнению с механообработкой является необходимость обеспечить значительно большее быстродействие, поскольку цикл работы пресса измеряется всего несколькими секундами. Используемые здесь ПР имеют простое цикловое управление, как правило, цилиндрическую систему координат манипулятора и три степени подвижности. Захватное устройство, чаще всего, выполняется в виде вакуумных присосок. Для обеспечения необходимой быстроты обслуживания пресса часто применяют ПР с двумя манипуляторами: один — для загрузки, а другой — для разгрузки штампа. Основным стимулом для автоматизации кузнечно-штамповочного производства, наряду с повышением производительности, являются тяжелые условия работы в кузнечных цехах. Однако в отличие, например, от холодной штамповки, задача комплексной автоматизации такого производства представляет значительные трудности, связанные со сложностью работы кузнеца. Поэтому, наряду с ПР, здесь широко применяют манипуляторы с ручным и автоматизированным управлением — ковочные телеоператоры, управляемые квалифицированными кузнецами. Помимо собственно штамповки, автоматизации подлежат операции загрузки заготовок в нагревательную печь, извлечения нагретой заготовки из печи, перемещения ее к ковочному прессу, манипулирования заготовкой при ковке, укладки готовой поковки в магазин. Кроме того, имеется еще ряд вспомогательных операций — таких как смазка и обдувка штампа (сдув окалины), обрезка облоя с детали и укладка его в тару. На рис. 16.1 показана схема комплекса горячей объемной штамповки, включающего два ПР: ПР1 — робот-кузнец и ПР2 — робот-обрубщик. Робот-кузнец (ПР-1) обслуживает индукционную печь для нагрева заготовок (ПИ) и пресс горячей штамповки (ПШ), а робот-обрубщик (ПР-2) — обрезной пресс (ПО) для обрубки облоя с поковки. Поковки к обрезному прессу и облой в магазин транспортируются с помощью транспортеров. Промышленные роботы на вспомогательных операциях 243 Рис. 16.1. Роботизированный комплекс горячей штамповки: ПИ — печь индукционная; ПШ — пресс кривошипный горячештамповочный; ПО — пресс обрубочный; ПР1 — робот-кузнец; ПР2 — робот-обрубщик; Т — транспортер; М1, М2, М3 — магазины для заготовок, поковок и облоя соответственно Комплекс свободной ковки включает обычно гидравлический пресс и манипулятор, с помощью которого оператор-кузнец осуществляет манипулирование заготовками при ковке. Процесс производства деталей методом литья под давлением заключается в заливке в машину литья под давлением определенной порции жидкого металла, взятого из печи, затем в удалении готовой отливки и подаче ее для обрубки литникового остатка. Кроме того, необходимо осуществлять смазку и обдув пресс-форм. Эффективность применения ПР для обслуживания машин литья под давлением связана с тем, что при обслуживании их рабочим значительны потери металла из-за неточности его дозирования и разбрызгивания при разливке, а также с простоем оборудования и снижением производительности из-за утомляемости рабочего. При этом условия труда являются не только тяжелыми, но и вредными для здоровья. Роботизированный комплекс литья под давлением состоит из раздаточной печи, машины литья под давлением, пресса для обрубки литников, робота-заливщика и робота для взятия отливки и охлаждения ее в баке с водой. На рис. 16.2 показан участок литья под давлением, обслуживаемый двумя ПР. Робот-заливщик погружает свой рабочий орган — ковш в расплавленный металл в раздаточной печи. Глубина погружения ковша определяет массу забираемого им металла и контролируется специальными контактными датчиками. После определенной выдержки времени, необходимой для разогрева и заполнения ковша, ковш поднимается, перемещается к приемнику металла машины литья под давлением и наклоняется для слива металла. После раскрытия пресс-формы отливка выталкивается толкателем и переносится вторым роботом в бак с водой для охлаждения. Затем тем же роботом она подается на пресс для обрубки литников и сбрасывается в магазин. 244 Глава 16 а) б) 4 Рис. 16.2. Роботизированный комплекс литья под давлением: а — вид со стороны робота-заливщика; б — вид со стороны робота, снимающего отливку: 1 — машина для литья под давлением; 2 — робот-заливщик; 3 — робот для снятия отливок; 4 — пресс для обрубки литников ГЛАВА 17 ОСОБЕННОСТИ ПРИМЕНЕНИЯ СРЕДСТВ РОБОТОТЕХНИКИ В НЕМАШИНОСТРОИТЕЛЬНЫХ И В НЕПРОМЫШЛЕННЫХ ОТРАСЛЯХ 17.1. Робототехника в немашиностроительных отраслях промышленности Помимо машиностроения и приборостроения, средства робототехники все более широкое применение получают в угольной и горнодобывающей промышленности, черной и цветной металлургии, строительстве, легкой и пищевой промышленности, на транспорте. Важность применения робототехники в этих областях очевидна уже из того факта, что здесь задействована большая часть трудовых ресурсов страны, а степень автоматизации ниже, чем в машиностроении. Сегодня применение средств робототехники в немашиностроительных отраслях осуществляется, прежде всего, путем использования опыта в этой области машиностроительных отраслей. Общее количество используемых в немашиностроительных отраслях роботов и манипуляторов не превышает 20% их общего парка. Анализ показывает, что только за счет использования роботов общепромышленного применения эта величина может быть увеличена примерно вдвое. Однако для основной части производств в этих отраслях требуются роботы специальных типов. В табл. 17.1 показан опыт применения средств робототехники в немашиностроительных отраслях. Анализ технических требований к роботам, необходимым для этих отраслей, и условий их эксплуатации показывает, что, в отличие от машиностроения, здесь значительно меньше возможностей для применения роботов с простым программным управлением, а требуются, прежде всего, роботы очувствленные, с адаптивным управлением. Это объясняется тем, что в немашиностроительных отраслях существуют значительно большая неопределенность и изменчивость как параметров объектов манипулирования, так и внешней среды в целом. Здесь требуется большая доля мобильных роботов (в том числе для передви- 246 Глава 17 жения на открытой местности), роботов повышенной грузоподъемности и для работы в экстремальных условиях. Таблица 17.1. Применение средств робототехники в немашиностроительной промышленности Операция Тип средств робототехники Угольная и горнодобывающая промышленность Установка крепи в забое Мобильный робот с техническим зрением и двумя манипуляторами Бурение шурфов Многоманипуляторный мобильный робот с навигационной системой Отделение угля от породы Робот с техническим зрением и другими средствами очувствления Погрузка горной массы Мобильный робот-погрузчик Погрузочно-разгрузочные работы в обогатительном производстве Металлургия Загрузка чушек и металлолома в печь Манипулятор, управляемый оператором Ремонт огнеупорной кладки печей, домен Мобильные роботы Пробивка корки шлака и устранение анодного эффекта при электролизе алюминия Роботы с техническим зрением и силовым очувствлением Извлечение штырей в электролизерах и их перестановка Укладка и обвязка пакетов чушек, их погрузка и доставка Манипуляторы, управляемые оператором Лесозаготовительное производство Валочно-пакетирующие работы на лесосеках Манипулятор с управлением от оператора Деревообрабатывающее производство Средства робототехники, аналогичные применяемым в машиностроительном производстве Погрузочные работы Строительная промышленность Бетонные, строительно-монтажные, отделочные работы Адаптивные мобильные роботы, оснащенные специнструментом Облицовочные работы Робот для монтажа облицовочных плиток Монтаж металлоконструкций (зданий, мостов, резервуаров и т. п.) Робот-монтажник-высотник Окрасочные работы Робот-маляр Особенности применения средств робототехники... 247 Таблица 17.1 (окончание) Операция Тип средств робототехники Легкая и пищевая промышленность Обслуживание основного технологического оборудования (прядильные и швейные машины, агрегаты, формирующие синтетические нити, прессы горячей вулканизации, печи для обжига керамических изделий и т. п.) Средства робототехники, аналогичные применяемым в машиностроении и приборостроении Внутрицеховые погрузочно-разгрузочные и транспортные работы Раскрой кожи и других материалов Средства робототехники, аналогичные применяемым в машиностроении и приборостроении Укладка в тару конфет, овощей при консервировании и т. п. Погрузочно-разгрузочные работы в холодильниках Транспорт Погрузочно-разгрузочные работы Регламентное обслуживание железнодорожных путей Средства робототехники, аналогичные применяемым в машиностроении Шагающие транспортные машины На рис. 17.1–17.6 приведены примеры роботов, упомянутых в табл. 17.1. Рис. 17.1. Проходческий комбайн КП220 («Копейский машиностроительный завод», Россия) 248 Глава 17 Рис. 17.2. Робот для бурения шурфов (робот-бурильщик) Рис. 17.3. Робот Top Tec 5500 для очистки разливочных ковшей (Top Tec Spezial-maschinen, Германия) Особенности применения средств робототехники... Рис. 17.4. Многооперационный мобильный лесосечный робот Hazvester (Pluster Oy, США) Рис. 17.5. Телеуправляемый мобильный робот-цементоукладчик MEYCO (MEYCO Equipment, США) 249 250 Глава 17 Рис. 17.6. Робототехнический комплекс для химической обработки железнодорожных вагонов: 1 — тележка с оператором; 2 — подвижное основание; 3 — промышленный робот; 4 — пантографическая стрела 17.2. Робототехника в непромышленных отраслях В табл. 17.2 приведены примеры использования робототехники в некоторых непромышленных отраслях. Таблица 17.2. Применение средств робототехники в непромышленных отраслях Операция Тип средств робототехники Агропромышленное производство Уборка овощей и фруктов Мобильные очувствленные роботы Прополка и прореживание овощей Робот с техническим зрением для работы в комплексе с прореживателями Обслуживание теплиц Мобильный робот (для выращивания рассады, уборки продукции) Товарная доработка плодоовощной продукции (сортировка и загрузка в контейнеры) Обслуживание свиноводческих комплексов и комплексов для крупного рогатого скота Дойка и санитарная обработка вымени коров Стрижка овец Робот с техническим зрением и другими сенсорными системами Специальные очувствленные роботы Особенности применения средств робототехники... 251 Таблица 17.2 (окончание) Операция Тип средств робототехники Погрузочно-разгрузочные работы с сельскохозяйственной продукцией, сеном, силосом, удобрениями и т. п. Средства робототехники, аналогичные применяемым в машиностроении Вождение тракторов и других сельскохозяйственных машин Робот-тракторист Медицина Хирургия (микрохирургия, дистанционная хирургия, стерильная хирургия) Прецизионные роботы и манипуляторы, управляемые оператором Внутриполостная и внутрисосудистая диагностика Мобильные микророботы Протезирование конечностей Реабилитация инвалидов и больных Роботы для массажа и физических упражнений Уход за больными и инвалидами Робот-сиделка Помощь при передвижении слепых людей Робот-поводырь Сфера обслуживания Погрузочно-разгрузочные работы Охрана помещений Средства робототехники, аналогичные применяемым в машиностроении Мойка окон высотных зданий Робот с техническим зрением и другими сенсорными системами Уборка помещений Бытовые мобильные роботы Уход за детьми Робот-нянька, роботы-игрушки Широкие возможности для комплексной автоматизации и роботизации открывает робототехника в сельском хозяйстве. Основные особенности применения здесь средств робототехники заключаются в большой территориальной протяженности и разобщенности предприятий, сезонности работ, сильной зависимости от погодноклиматических условий, в непосредственном контакте с животными и растительными организмами, имеющими большую разбросанность характеристик и специфические требования к взаимодействию с ними. Одна из важных задач в полеводстве — создание роботов для вождения тракторов, комбайнов и других агрегатов с высвобождением работников самых массовых здесь профессий: трактористов и водителей. Роботы-трактористы должны быть приспособлены для замены тракториста на его стандартном рабочем месте. Это позволит оперативно использовать такие роботы в серийных машинно-тракторных агрегатах, заменять трактористов при выполнении работ особо опасных (внесение ядохимикатов и т. п.) или утомительных (вождение культиваторов и прореживателей строго по рядкам растений и т. п.), осуществлять групповое вождение тракторов и других машин с роботами-водителями за трактором-лидером, ведомым трак- 252 Глава 17 тористом. Замена трактористов роботами позволит повысить производительность агрегатов, сменность, ритмичность и качество работы, снизить расход топлива. Одни из наиболее трудоемких отраслей сельскохозяйственного производства: овощеводство и картофелеводство. Производительность труда на ряде операций здесь ограничена физическими возможностями человека. Например, для укладки рассады в высаживающий аппарат требуется несколько сажальщиц на каждой рассадочной машине, которые должны работать в ритме примерно одна операция в секунду в условиях тряски, пыли, при различной погоде. В теплицах применение мобильных роботов позволяет комплексно автоматизировать большой круг работ по подготовке почвы, высеву семян, опрыскиванию химикатами, сбору готовой продукции (рассады, овощей, фруктов), ее сортировке и укладке в тару (на рис. 17.7 показан образец робота для сбора ягод). Рис. 17.7. Робот для сбора ягод (Romobility Youto, Япония) Аналогичные задачи необходимо решать на стационарных пунктах послеуборочной обработки овощей и фруктов, включая их сортировку, отделение примесей и некондиционных экземпляров. В животноводстве и птицеводстве требуются, в частности, роботы для выполнения следующих работ: основные технологические операции: дозированная раздача кормов, разбрасывание подстилки, уборка навоза, дезинфекция помещений, взвешивание животных; механизированное доение коров; дефектоскопия и сортировка яиц в неорганизованных потоках с последующей укладкой в тару. Особенности применения средств робототехники... 253 Большие перспективы имеет робототехника в медицине — в том числе, в хирургии, протезировании, для реабилитации и обслуживания больных и инвалидов. На основе достижений робототехники создаются все более совершенные искусственные конечности: протезы рук и ног, имеющие приводы, встроенные микропроцессорные устройства управления и биологические обратные связи. Созданы искусственные скелеты с приводами — так называемые экзоскелетоны («экзо» означает «внешний») — для парализованных людей (см. рис. 1.10). На рис. 17.8 приведен пример хирургического комплекса с четырьмя манипуляторами, управляемыми хирургом с помощью задающих рукояток. На рис. 17.9 показан медицинский робототехнический комплекс для выправления переломов. а) б) Рис. 17.8. Медицинский робот da Vinca: а — манипуляционная система; б — оператор за пультом управления (Intuitive Surgical, США) Рис. 17.9. Медицинский робототехнический комплекс 3DOF: 1 — рентгеновский аппарат; 2 — медицинский пульт; 3 — телевизионная система; 4 — манипулятор; 5 — устройство управления; 6 — пульт оператора с задающей рукояткой с отражением усилия (Technical University Braunschweig, Германия) 254 Глава 17 Быстро развивается новое направление применения роботов — сервисные роботы для обслуживания больных, инвалидов, детей и для использования в домашнем хозяйстве по уборке помещений, работе на кухне, охране квартиры, выполнению функций швейцара, обслуживанию телефона, радио- и телевизионной аппаратуры и т. п. Такие роботы имеют техническое зрение, обладают слухом, дистанционными а) б) Рис. 17.10. Робот-игрушка РаРеRo (Япония): а — схема компоновки; б — общий вид Особенности применения средств робототехники... 255 и тактильными датчиками, могут вести диалог с человеком в объеме сотен фраз, снабжены системами радиоуправления и передвижения. На рис. 17.10 показан пример робота-игрушки PaPeRo. Робототехника в немашиностроительных и непромышленных отраслях, как уже отмечено, развивается сегодня, прежде всего, на базе опыта, накопленного в машиностроении, и в той же последовательности: изучение потребностей и определение технических требований к роботам, создание и отработка типовых роботизированных технологических ячеек, создание на их основе крупных базовых комплексов и, наконец, тиражирование последних в рамках отраслей. 256 Глава 17 ГЛАВА 18 ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА 18.1. Экстремальная робототехника в промышленности Одно из назначений робототехники — выполнение различного рода работ в экстремальных внешних условиях либо опасных и вредных для человека, либо вообще полностью исключающих его присутствие. Соответствующий раздел робототехники получил наименование «экстремальная робототехника». Под экстремальными условиями понимаются как аварийные ситуации, включая стихийные бедствия, так и штатные экстремальные ситуации, определяемые технологией. По мере интенсификации производства удельный вес и тех и других неуклонно растет. Это относится, в частности, к атомной энергетике и промышленности, химической, металлургической, горнодобывающей отраслям промышленности, подводным работам, освоению космоса, военному делу. Экстремальные условия определяются прежде всего внешними условиями работы (радиация, сильные электромагнитные поля, экстремальные значения температуры, давления и т. д.). Помимо внешних условий экстремальные ситуации определяются и подлежащими выполнению операциями. В табл. 18.1 приведен примерный перечень подобных операций. Как следует из этого перечня, основным типом технических систем, требующихся для выполнения перечисленных операций, являются робототехнические системы (РТС), благодаря характерной для них многофункциональности и гибкости, позволяющих оперативно выполнять различные технологические операции. Кроме них для выполнения отдельных типовых технологических операций требуется довольно широкая номенклатура специальных технологических систем, с которыми РТС должны взаимодействовать. Примерами таких специальных технических систем могут служить строительные, строительнодорожные, транспортные, погрузоразгрузочные машины — экскаваторы, бульдозеры, краны и т. д., но в специальном исполнении, предназначенном для работы в экстремальных внешних условиях. Наиболее важными характеристиками РТС для рассматриваемой области применения являются способы управления, перемещения и энергопитания. Основным спо- 258 Глава 18 собом управления такими техническими системами является комбинация дистанционного управления со стороны человека-оператора и местного автоматического управления. Перемещение к месту работы может обеспечиваться специальными транспортными средствами или собственной системой передвижения (мобильные РТС). Энергопитание может быть автономным, кабельным или комбинированным. Таблица 18.1. Перечень работ и входящих в них технологических операций в экстремальных условиях № п/п 1. Наименование работ Наименование операции Инспекция Визуальный контроль, определение параметров местности, технических объектов (с земли, с воздуха, в воде) Радиационный контроль местности, помещений Определение состава атмосферы, воды, отдельных объектов Визуальный контроль труднодоступных помещений Снятие показаний контрольно-измерительной аппаратуры Определение положения показывающих и исполнительных органов, вентилей, тумблеров Выявление мест утечек в трубопроводах и оборудовании 2. Погрузоразгрузочные и транспортные работы Доставка различных технических средств Расчистка проходов, устройство транспортных путей (проездов, переправ и т. п.) Разборка завалов, укрепление или обрушение неустойчивых конструкций Транспортировка материалов, инструмента, емкостей и других объектов Сбор и транспортировка опасных отходов Удаление опасных предметов (взрывных устройств, радиоактивных источников и т. п.) Создание дамб и заградительных полос 3. Манипуляционные работы Монтаж и демонтаж оборудования и конструкций Сборка и разборка соединений Нанесение и удаление покрытий Бандажирование течей на трубопроводах, замена прокладок в уплотнительных соединениях Работа со взрывчатыми, радиоактивными и другими опасными материалами (кантование, укладка, пересыпание, уплотнение и др.) Экстремальная робототехника 259 Таблица 18.1 (окончание) № п/п Наименование работ Наименование операции Сбор и удаление рассыпных материалов Установка и снятие домкратов, опор и растяжек Сварка и резка труб, металлоконструкций Сверление и фрезерование Бурение Резка металлических, бетонных, железобетонных, деревянных конструкций Дробление обломков строительных конструкций Открывание дверей, люков, задвижек 4. Очистка Дезактивация химическая, биологическая и другая очистка местности, строений, помещений, конструкций и оборудования Очистка площадок Откачка воды из затопленных помещений 5. Строительновосстановительные работы Организация энергоснабжения Обеспечение средствами связи Восстановление транспортных путей (шоссейных дорог, железнодорожных путей и аэродромов) 6. Пожаротушение Разведка очагов пожаров Локализация и тушение пожаров 7. Спасение людей Поиск людей в местах их блокировки Эвакуация людей из мест чрезвычайных ситуаций По характеру выполняемых операций все РТС можно объединить в 2 группы: инспекционные и технологические. Инспекционные системы (разведчики) предназначаются для взятия проб и отдельных объектов, выполнения различных операций с органами управления основного технологического и другого оборудования и отдельных технологических операций с помощью сменного инструмента. Технологические РТС предназначены для выполнения различных операций обычно с помощью сменных рабочих органов, включая укрепленные на шасси бульдозерные отвалы, грейферы, сварочные аппараты и т. п. Основная тенденция развития рассматриваемой техники — создание автономных и телеуправляемых мобильных РТС с развитой сенсорикой, адаптивным и интеллектуальным управлением. На рис. 18.1 показан один из инспекционных мобильных роботов, нашедших применение на работах при ликвидации последствий аварии на Чернобыльской АЭС [1]. 260 Глава 18 Рис. 18.1. Робот-разведчик РР-Г1 (ЦНИИ РТК, Россия) На рис. 18.2 приведен мобильный робот Антитеррорист, предназначенный для поиска и идентификации опасных предметов. Показано, как робот, обнаружив предмет в виде портфеля, осуществляет его рентгеновское просвечивание для определения содержимого. Рис. 18.2. Робот Антитеррорист (ЦНИИ РТК, Россия) Решение проблемы создания РТС для экстремальных условий связано со следующими особенностями: сложность (экстремальность) внешних условий, зачастую находящихся на пре- деле возможностей современной техники; Экстремальная робототехника 261 сложность, многообразие, нечеткость (изменчивость) подлежащих выполнению функций, приводящие к большой номенклатуре требующихся технических средств, как правило, при единичном характере потребностей в этой технике; межотраслевой характер проблемы, как с точки зрения потребителей, так и про- изводителей требуемых технических средств. С учетом этих особенностей в основу проектирования средств экстремальной робототехники должна быть положена функциональная и конструктивная унификация технических средств на основе их модульного построения, рассмотренного в главе 13 (разд. 13.2). 18.2. Космическая робототехника В космонавтике робототехника предназначена для выполнения различных манипуляционных и транспортных операций, включая техническое обслуживание космических аппаратов и космонавтов, замену последних на отдельных технологических операциях и выполнение операций, недоступных или опасных для космонавтов, а также обследование и мониторинг внешней среды. Эффективность замены человека средствами робототехники состоит, кроме того, и в исключении эффекта «человеческого фактора». Объектами применения космической робототехники являются: космические аппараты в околоземном пространстве и в межорбитальных по- летах; свободно летающие роботы в открытом космосе (обследование космического пространства и отдельных объектов, их техническое обслуживание, сборка габаритных конструкций и т. п.); поверхность космических тел, включая Луну, другие планеты. В мире разработки систем космической робототехники ведутся в основном в США, Канаде, европейских странах, Японии. Важной разработкой, которая продемонстрировала высокую эффективность этой техники в условиях космоса, является канадский манипулятор на американском корабле «Шаттл» (рис. 18.3). На рис. 18.4 и 18.5 показаны примеры других разработок космических РТС. Европейское космическое агентство спроектировало трехрукий робот Eurobot (см. рис. 18.5) для помощи космонавтам, в том числе в открытом космосе. В США созданы робот Robonaut, снабженный манипуляторами, способными выполнять повышенной сложности и точности операции, летающий робот для обслуживания МКС и шестиногий напланетный транспортный робот Spider Nant. В Японии наряду с манипулятором на японском модуле МКС ведутся разработки робототехнических систем для технического обслуживания космических аппаратов. Из отечественных разработок наиболее крупной является система бортовых манипуляторов для российского многоразового корабля «Буран» (рис. 18.6). 262 Глава 18 Рис. 18.3. Манипулятор Canadarm корабля Space Shattle (MD Robotics, Канада) Рис. 18.4. Космическая транспортно-манипуляционная система (ЦНИИ РТК, Россия) Экстремальная робототехника 263 Рис. 18.5. Робот Eurobot (Европейское космическое агентство) Рис. 18.6. Манипулятор корабля «Буран» (ЦНИИ РТК, Россия) В главе 3 приведены другие разработки космической робототехники. Накопленный опыт разработок и применения средств робототехники в космосе можно обобщить в виде следующих четырех принципов. 1) Унификация функциональных компонентов космических средств робототехники. В пределе это реализуется иерархической системой модулей (информационных и силовых). Этот принцип обеспечивает практически неограниченную номенклатуру и высокую надежность создаваемых на его основе технических систем. Однако 264 Глава 18 в тех случаях, когда прежде всего необходимо обеспечить предельно высокое качество создаваемой системы по какому-то общему критерию (в космической технике это часто минимум массы, габаритов, энергопотребления), при синтезе такой системы необходимо переходить от модульной декомпозиции соответственно к системному подходу. 2) Реконфигурируемость робототехнических систем, т. е. создание систем переменной структуры. Основа принципа — указанное выше модульное построение. Его реализация означает замену ограниченного числа РТС фиксированного состава и назначения существенно меньшим их числом с возможностью оперативно изменять их функции путем изменения состава модулей. 3) Оптимальное сочетание средств робототехники и человека. Речь идет о специфическом именно для космонавтики оптимальном взаимодействии человека и техники, обязанном следующим обстоятельствам: сложные внешние условия, включая вообще недопустимые для непосредствен- ного присутствия человека; весьма ограниченные возможности выполнения человеком различных рабочих операций, особенно в открытом космосе; повышенная ответственность (важность) многих подлежащих выполнению опе- раций; определенная удаленность от земных центров управления. В непилотируемом космосе при наличии человека-оператора в центре управления рассматриваемый принцип наиболее прост и уже достаточно отработан: космические аппараты, в том числе напланетные, должны иметь максимальную автономность функционирования. Это должно обеспечиваться системой автоматического управления. Роль человека-оператора при этом заключается в выдаче заданий (программ), которые предусматривают также остановку их выполнения при возникновении любых нештатных ситуаций. Особую сложность этот принцип имеет для пилотируемых аппаратов, где необходимо обеспечить оптимальное распределение подлежащих выполнению операций между космонавтом и робототехникой, включая возможность совместной работы, а также управления из наземного центра. При этом приоритет дается средствам робототехники при выполнении операций, которые они могут качественно выполнять в автоматическом режиме или при участии в управлении человека. Однако эти процессы должны находиться под оперативным контролем человека с возможностью блокировки их продолжения при возникновении каких-либо нештатных ситуаций. Основные операции, которые на сегодня доступны только космонавту, естественно, он и должен выполнять. Однако в этом случае для исключения эффекта «человеческого фактора» в свою очередь должен быть осуществлен контроль за действиями человека, чтобы исключить его неадекватные действия, в том числе и с переходом к внешнему управлению из центра управления. Экстремальная робототехника 265 4) Комбинированное управление средствами робототехники — автоматическое и от человека (автоматизированное), в том числе с Земли (с обязательным учетом предыдущего принципа). В силу большой неопределенности, в том числе внешних условий, для большинства подлежащих выполнению операций, особенно сборочно-монтажных, настроечных, ремонтных и инспекционных, наряду с дальнейшим развитием автоматического интеллектуального управления необходимо привлечение неформализуемых способностей человека, т. е. в этих случаях переходить к управлению от человекаоператора. Таким образом, и в этом принципе совместного функционирования техники и человека приоритет дается последнему. Однако, как и в предыдущем случае, для исключения влияния эффекта «человеческого фактора» и в системах управления человеком средствами робототехники должна быть предусмотрена блокировка неадекватных действий человека-оператора — автоматическая или, если это возможно, из центра управления. Перечисленные принципы находятся в разной стадии реализации. В своей совокупности они определяют направления и перспективы развития космической робототехники. 18.3. Подводные роботы Исследование и освоение глубин океана и морского дна — еще одна важная сфера экстремальной робототехники, перспективность которой связана прежде всего с тяжелыми и опасными для человека внешними условиями. В настоящее время в мире создано около тысячи подводных роботов — от микророботов с массой менее 1 кг до больших — более 1000 кг. По назначению их можно разделить на следующие группы: информационные роботы для исследования океана, мониторинга, поиска зато- нувших судов и других объектов; технологические роботы для выполнения различных силовых операций по обслуживанию подводных сооружений (буровых скважин, трубопроводов, кабелей), строительно-монтажным работам, очистке и окраске подводной части кораблей; спасательные работы; военные и военно-технические роботы (минирование и разминирование, поиск и извлечение неразорвавшихся торпед, бомб, боевая охрана акваторий, вооруженная борьба с объектами противника и т. д.). Подводные роботы делятся на свободно плавающие, привязные и донные. Они могут быть обитаемыми и без операторов на борту. Привязные роботы соединены кабель-тросом с кораблем. Через кабель осуществляется энергопитание и двусторон- 266 Глава 18 няя связь. Один из первых отечественных роботов-геологов этого типа «Манта» был показан на рис. 1.11. На рис. 18.7 приведена схема системы управления роботов этого типа. Рис. 18.7. Структурная схема системы управления подводного робота типа «Манта» В состав схемы входят пульт управления с устройством целеуказания на телеэкране и бортовой вычислитель, который обеспечивает автономное выполнение роботом следующих директив оператора в супервизорном режиме управления: взять объект, указанный оператором на телеэкране; перенести этот объект ближе к телекамере, положить в бункер или в любую за- данную на телеэкране точку пространства; искать объект, в том числе вслепую (на ощупь), в заданном квадрате (в случае плохой видимости из-за замутнения воды и других причин). В этом режиме обеспечивается автоматический обход манипулятором встречающихся препятствий. На рис. 18.8 показан современный отечественный обитаемый исследовательский подводный робот «Мир» с глубиной погружения до 6000 м, снабженный двумя манипуляторами. Экстремальная робототехника 267 Рис. 18.8. Подводный робот «Мир» (Институт океанологии, Россия) 18.4. Военная робототехника Важным разделом экстремальной робототехники является робототехника для вооруженных сил. В нее входят следующие по назначению типы средств робототехники: боевые; боевого обеспечения; специально-технического обеспечения; тылового обеспечения. Основными специфическими видами средств робототехники для вооруженных сил являются: мобильные роботы наземного, воздушного и водного базирования; роботы-водители и роботы-пилоты для различных видов боевых и транспортных машин; роботы и другие средства робототехники для обслуживания вооружений и воен- ной техники. На рис. 18.9 показан телеуправляемый мобильный робот-разведчик на трансформируемом шасси, позволяющем преодолевать высокие бордюры и подниматься по лестницам. Робот снабжен системой технического зрения в видимом и инфракрасном спектрах, микрофоном, светодиодным прожектором. 268 Глава 18 Рис. 18.9. Робот-разведчик TALON (фирма Foster-Miller, США) На рис. 18.10 показан боевой автономный мобильный робот модульной конструкции с оперативно сменяемым оснащением от средств поражения (пулемет, гранатомет) до манипулятора для обезвреживания мин. Рис. 18.10. Боевой робот «Платформа-М» (НИТИ, Россия) Экстремальная робототехника 269 Основными факторами эффективности применения робототехники в вооруженных силах являются: применяемость в экстремальных условиях, не допускающих участие людского персонала; повышение быстродействия, точности и стабильности основных характеристик вооружения и военной техники; исключение ошибок операторов (от усталости, влияния неблагоприятных фак- торов внешней среды, стрессовых ситуаций, перерывов в тренировках и т. п.); сокращение численности личного состава и выведения его из зон, опасных для жизни и здоровья; снижение потерь личного состава; упрощение собственно вооружения и военной техники; меньшая их стоимость. Важным условием повышения эффективности военной робототехники является комплексная унификация номенклатуры требуемых средств робототехники и их основных комплектующих систем. Хотя на вооружении армий в мире находятся десятки образцов военных робототехнических систем, широкому применению робототехники в вооруженных силах препятствуют следующие недостатки и ограниченные возможности современной робототехники: исполнительные системы и, прежде всего, манипуляционные имеют неудовле- творительные массогабаритные параметры, во много раз уступающие аналогичным параметрам человека; неудовлетворительные интеллектуальные возможности информационных и управляющих систем. Первоочередными направлениями применения робототехники в вооруженных силах являются: создание мобильных роботов-разведчиков, саперов, охранников и тому подоб- ных легких роботов; создание роботов для обслуживания вооружения и военной техники; применение средств робототехники для обеспечения безэкипажного функциони- рования традиционных подвижных средств военной техники. На первом этапе данной работы создаются роботы в значительной степени с дистанционным управлением с последующим наращиванием их интеллекта и соответственно количества автоматически выполняемых операций. Особый раздел военной робототехники составляет мини- и микроробототехника этого назначения. Развивается она в русле общей тенденции миниатюризации техники на базе новых трехмерных технологий микроэлектромеханических систем (МЭМС). На рис. 18.11 и 18.12 показаны образцы боевых микророботов. 270 Глава 18 Рис. 18.11. Дистанционно управляемый микроробот-разведчик Sand Dragon (США) Рис. 18.12. Группа шагающих микророботов-охранников во главе с мини-роботом (Spawer System Center, США) Особый класс микророботов составляют биороботы. Это живые организмы, в основном, мелкие животные, управляемые человеком или автоматически путем воздействия на их нервную систему электрическими сигналами через электроды, вживленные в мозг. Типичные назначения таких биороботов — радиационная и химическая разведка, поиск взрывчатых веществ и людей под развалинами. Для этого они оснащаются дополнительными сенсорными системами, включая микрофоны и системы технического зрения, а также радио- приемопередатчиками. Очевидное основное достоинство биороботов — это возможность целенаправленно длительное время (более месяца) функционировать без воды и пищи, в том числе Экстремальная робототехника 271 в недоступных для человека местах, используя при этом присущие живым организмам способности к ориентации, навигации, преодоления препятствий и т. п. На рис. 18.13 показан пример биоробота-таракана. Он оборудован процессором, видеокамерой и предназначен для выполнения разведывательных операций. Рис. 18.13. Биоробот-таракан (Tokyo University, Япония) 272 Глава 18 ГЛАВА 19 СОЦИАЛЬНО-ЭКОНОМИЧЕСКИЕ АСПЕКТЫ РОБОТОТЕХНИКИ 19.1. Социально-экономическая эффективность применения средств робототехники Применение робототехники обосновывается экономикой и социальной эффективностью, которые должны быть доказаны количественно в технико-экономическом обосновании (ТЭО) соответствующего проекта по робототехнике. Экономическая эффективность создания, усовершенствования какого-то робота или другого средства робототехники или РТС определяется на основе соответствующих методик. Обычно экономическая эффективность определяется по годовому экономическому эффекту, полученному от применения новой техники или по сроку окупаемости дополнительных расходов, связанных с ее приобретением и внедрением (рост производительности, снижение брака и себестоимости, экономия зарплаты и т. д.). Социальный эффект (улучшение условий труда, снижение травматизма и профзаболеваний, снижение текучести кадров и расходов на технику безопасности и т. д.) также должен учитываться в экономических расчетах. Все, что изложено выше, относится к классическому случаю создания и применения робототехники при наличии альтернативных технических вариантов, с которыми следует сравнивать и доказывать большую эффективность. Однако применение робототехники во многих случаях безальтернативно, например, связано с государственной научно-технической независимостью. В этих случаях ТЭО проводится уже только в рамках робототехнических вариантов. 19.2. Техника безопасности в робототехнике Робот дает социально-экономическую эффективность, но одновременно сам может представлять опасность для людей. В проблеме безопасности труда при использовании роботов можно выделить следующие 2 аспекта: 274 Глава 19 применение роботов как средства повышения безопасности производства; обеспечение безопасности при эксплуатации самих роботов. Первый аспект соответствует одному из первоочередных назначений роботов — избавлению людей от травмоопасного, вредного и тяжелого физического труда. При планировании внедрения роботов в производство такого рода технологические операции получают приоритет и на таких операциях роботы применяются наиболее успешно. В машиностроении к этим операциям относятся, в частности, обслуживание кузнечно-прессового оборудования и металлорежущих станков (особенно при обработке тяжелых заготовок), оборудования в гальваническом и литейном производствах, в производстве изделий из пластмасс, а также такие основные технологические операции, как сварка, окраска, погрузочно-разгрузочные и транспортные работы. В немашиностроительных отраслях такими операциями являются, например, установка крепи в забое, обслуживание отбойных и бурильных агрегатов в горнодобывающей и угольной промышленности, обслуживание оборудования во вредной для здоровья атмосфере в химической и нефтехимической промышленности, различные манипуляционные операции в металлургической промышленности, атомной энергетике и других производствах с экстремальными условиями (вредные излучения, взрывоопасность, предельные температуры, загазованность, запыленность и т. п.). В мире накоплен определенный положительный опыт повышения безопасности труда с помощью роботов. Второй отмеченный ранее аспект робототехники с точки зрения безопасности труда — это обеспечение безопасной работы самих роботов, которые при определенных условиях могут представлять собой источник опасности для человека, а также и для работающего с ними оборудования. По данным статистики в Японии, где применение роботов достигло наибольших размеров, почти каждый третий рабочий так или иначе сталкивается с опасностями, создаваемыми роботами. В основном такие опасности вызываются следующими причинами: неисправность собственно роботов из-за нарушения их механической прочности или отказов в системе управления; ошибки программирования и настройки, вызывающие при эксплуатации не- предвиденные движения с выходом из огражденной рабочей зоны; потери объекта манипулирования и другие аварийные ситуации из-за превыше- ния допустимых динамических режимов и перегрузок; нарушение персоналом условий эксплуатации робота (вход в рабочую зону, осо- бенно при отключенных средствах безопасности, отсутствие личных средств безопасности, превышение допустимой грузоподъемности, несоответствие исполнения робота реальным условиям эксплуатации, другие нарушения технических условий на робот или технологический комплекс, в составе которого он работает); неправильная работа средств безопасности, которыми оборудованы робот и его рабочая зона (устройства блокировки, сигнализации, защитные ограждения и т. п.). Социально-экономические аспекты робототехники 275 Статистика показывает, что основная часть несчастных случаев связана с нахождением обслуживающего персонала в рабочей зоне при программировании, настройке и ремонте роботов. Несчастные случаи во время работы робота в автоматическом режиме составляют всего единицы процентов. Мероприятия по обеспечению безопасности роботизированных производств должны быть предусмотрены на всех этапах их создания и эксплуатации, начиная с формулирования технических требований, и регламентированы соответствующими нормативно-техническими документами, а также специальными документами по технике безопасности. Общие требования по безопасности при проектировании и эксплуатации роботов стандартизированы. В этих требованиях, в частности, регламентированы следующие позиции: если при программировании и наладке робота требуется пребывание персонала в его рабочей зоне, то в этих режимах должно быть предусмотрено снижение скорости исполнительных устройств робота до ~ 0,3 м/с; пульт управления робота должен выдавать информацию о режиме его работы, срабатывании блокировок и функционировании работающего с ним технологического оборудования, наличии сбоев в работе, начале движения робота. Регламентированы также требования к предохранительным, блокирующим и защитным устройствам, которыми должны быть оснащены роботы. Применительно к организации технологических комплексов регламентированы: необходимость комплексной автоматизации всех основных и вспомогательных операций с допустимостью сохранения за оператором в основном только некоторых функций управления и контроля; наличие блокирующих устройств и ограждений, требования к ним; планировка комплекса с учетом размеров рабочих зон роботов; требования к организации рабочих мест операторов, к пультам управления и расположенным в других местах дополнительным органам аварийного отключения. Применительно к эксплуатации роботов разработаны: требования, предъявляемые к обслуживающему персоналу, и перечень его обя- занностей; инструкции по охране труда. В обязанности обслуживающего персонала, в частности, входят проверка оборудования и блокировочных устройств перед началом работы, обязательная регистрация в специальном журнале всех неполадок и аварийных ситуаций. 276 Глава 19 ЗАКЛЮЧЕНИЕ Современная робототехника возникла на новом этапе автоматизации, получившем название гибкая автоматизация, на основе ЧПУ и компьютеров и обязана своим появлением возникшей при этом потребностью в принципиально новом типе автоматических машин для выполнения манипуляционных операций ранее выполнявшихся рабочими. Эти машины были названы роботами по ассоциации с многовековой мечтой о «механическом человеке». Однако очень скоро эта идея вышла за рамки замены людей и превратилась сперва в задачу технического освоения возможностей всего живого мира, а затем и использования этих результатов при создании техники сверх возможностей живых существ — космос и т. п. В результате робототехника открыла новый этап в развитии нашей цивилизации в целом на основе мыслящей, разумной техники, не ограниченной уже возможностями человека. Это предполагает решение фундаментальной научной проблемы познания самого феномена жизни и разума. В этом деле очевидна уникальная роль робототехники, по крайней мере, как экспериментальной базы. В целом можно обобщенно выделить следующие текущие технические и перспективные научные задачи, которые определяют перспективы развития современной робототехники. Механика движений включает следующие направления развития: освоение биоморфных принципов организации движений и управления ими — локомоций на поверхности, в воде, воздухе, манипуляций кистью руки, хобота и т. п.; это в свою очередь требует создания принципиально новых типов приводов с на порядок лучшими массогабаритными параметрами, в том числе типа «искусственная мыщца», на основе нанотехнологий. К последнему примыкает создание на такой же основе новых типов бортовых источников энергии. Все это, по существу, представляют собой фундаментальные общенаучные проблемы, в решении которых робототехника по самому ее определению является инициатором. 278 Заключение Сенсорное обеспечение средств робототехники требует следующего развития: комплексирование сенсорных систем, в том числе на базе нейронных сетей и мультиагентного подхода; на этой основе распознавание предельно сложных прежде всего видеообразов в реальном времени; совершенствование силомоментных сенсорных систем, в том числе путем со- вместного применения соответствующих датчиков и наблюдателей; создание сенсорных систем абсолютных координат рабочих органов манипу- ляторов, в том числе для реализации позиционно-силового управления ими; создание нового поколения сенсоров общего применения и специальных на основе нанотехнологий. Системы управления роботов развиваются в следующих направлениях: креативная интеллектуализация; аппаратная реализация на базе нейронных сетей; развитие децентрализации систем группового управления роботами, в том числе на основе сетевых технологий. Интерфейсы оператор-робот развиваются в направлениях: интеллектуализация, в том числе на лингвистическом уровне информационного обеспечения; создание трехмерной стилизованной виртуальной реальности рабочих зон с обеспечением «эффекта присутствия»; создание новых средств общения оператора, включая сенсорные, голосовые и т. д. Наконец, интегральная стратегическая задача робототехники — создание роботов нового поколения (интеллект + креативность). Итак, основные направления развития робототехники включают: искусственный разум и его развитие в направлении уровня, освоенного в живой природе; групповое применение роботов и развитие распределенного группового разума; самосовершенствование роботов, в том числе в условиях группового функцио- нирования; интеллектуальный интерфейс человек-робот; продолжение освоения всех сфер деятельности человека. ПРИЛОЖЕНИЯ ПРИЛОЖЕНИЕ 1 ОСНОВНЫЕ ЭТАПЫ РАЗВИТИЯ ДВИЖЕНИЙ В ЖИВОЙ ПРИРОДЕ В табл. П1.1 приведены основные этапы эволюции движения, начиная с первых возникших на Земле живых организмов и заканчивая человеком. Таблица П1.1. Этапы развития движений в живой природе Сколько лет тому назад Новое появившееся качество У кого возникло Зарождение живой клетки в океане Одноклеточные 1 млрд Специализация клеток у многоклеточных с возникновением рецепторных, мышечных, а затем и нейронных клеток, осуществляющих связь между клетками, которая привела к возникновению рефлекторности Губки 800 млн Формирование головы со ртом и развитие на ней телерецепторов, ориентированных на внешнюю среду. Появление соответственно возможности целенаправленного движения всего тела в сторону определенных объектов внешней среды, т. е. появление локомоций Черви Головной мозг как центр координированного управления движением всех частей тела Высшие моллюски (осьминоги, каракатицы и др.) Поперечно-полосатая мышца и скелет, сначала наружный Членистоногие (ракообразные и др.) Внутренний скелет — основа дальнейшего совершенствования двигательных способностей Рыбы и далее все другие хордовые (позвоночные) Развитие сенсорной коррекции движений как нового уровня управления движением в функции от текущей информации о внешней среде, и соответствующее совершенствование головного мозга Конечности, возникшие из парных плавников рыб при переходе от водного к водно-наземному образу жизни Земноводные 500 млн 282 Приложение 1 Таблица П1.1 (окончание) Новое появившееся качество У кого возникло Сколько лет тому назад Экстрапирамидная двигательная система (см. рис. 2.7, Земноводные, 2.8) — иерархическая система управления движением, пресмыкающиеся, включающая как древние нижние уровни сегментарного птицы управления туловищем, так и новые уровни управления конечностями, развившиеся в головном мозге и совершенствующиеся у пресмыкающихся, а затем у птиц. У последних эта иерархическая система рефлекторного управления достигла наибольшего совершенства. Развился мозжечок, обеспечивающий координацию движений, равновесие Пирамидный путь управления мышцами (см. рис. 2.7, Млекопитающие 2.8) от коры головного мозга, возникший параллельно с иерархическим экстрапирамидным путем. Этот качественный скачок произошел на фоне эволюционно усложняющегося экстрапирамидного пути в результате развития коры головного мозга (зачатки которой появились еще у пресмыкающихся) и явился базой для освоения новых более совершенных (по сложности, быстродействию, точности) движений и развития самообучения как основы уже не инстинктивного, а разумного поведения Рука для манипуляций в процессе трудовой деятельности человека с использованием орудий труда. В результате развилась современная кора полушарий головного мозга Человек 3 млн Специализация людей в трудовом процессе 2 млн Биотехнические объекты, включающие живые существа Биороботы и вживленные технические системы, которые расширяют их возможности Симбиоз человека и робота — новый этап в развитии живой природы 100 млн Человек 30—35 тыс. Прогноз Около 1 млрд лет тому назад случайное соединение молекул в Мировом океане дало начало жизни — живую, т. е. размножающуюся, клетку. Примерно через 200 млн лет после этого появились первые многоклеточные, у которых со временем начался эволюционный процесс специализации клеток. Из наружных клеток, развивших способность реагировать на внешние раздражения (механические, химические, температурные и др.), возникли сенсорные клетки — рецепторы. Внутренние клетки, приобретя способность сокращаться, превратились в мышечные. В результате возникли первые еще беспорядочные рефлекторные движения, прежде всего, как реакция на внешние воздействия. Необходимая для этого связь между рецепторными и мышечными клетками была сначала реализована химическим путем (с помощью специальных веществ — медиаторов), а затем — с помощью электрических сигналов. Последнее позволило повысить быстродействие, хотя вначале эти сигналы тоже были ненаправленными, диффузно распространявшимися по всему Основные этапы развития движений в живой природе 283 телу. Затем постепенно оформились определенные пути для этих сигналов и появились соответствующие специальные нервные клетки. Следующим принципиальным этапом эволюции было развитие специализации частей тела животных. Появились продолговатые животные, один конец тела которых, где помещался рот, постепенно обогащаясь рецепторами, стал главным, т. е. головой. Развитие чувствительности рецепторов привело к появлению дистанционных рецепторов — телерецепторов (обонятельных, слуховых, зрительных). Такая дистанционная чувствительность в определенных направлениях дала толчок к организации локомоций, т. е. к целенаправленному передвижению всего тела. В связи с этим потребовалась координация частей тела, в результате чего появился такой центр управления, как головной мозг, задачами которого стали сбор информации от рецепторов, обработка ее и на этой основе выработка сигналов управления мышцами, т. е. движением тела, как реакции на зарегистрированные внешние раздражители. Важный момент в развитии движения животных — появление поперечнополосатой мышцы, которая в сотни и тысячи раз мощнее и динамичнее ранее возникшей гладкой мышцы. С появлением такого мощного двигателя потребовался жесткий скелет (до этого все живые существа были мягкотелыми). Эволюция с этого момента пошла двумя путями: наружный скелет в виде панциря, состоящий из отдельных пластинок, соединенных внутри мышцами, — у членистоногих; скелет из костей внутри с расположенными снаружи соединяющими их мышцами — у хордовых (позвоночных). Второй путь был сложнее первого, так как помимо собственно движения тела требовалось еще поддержание его позы и устойчивости. Однако именно этот путь обеспечил возможность реализовать значительно более сложные, быстрые и точные движения. В связи с этим первый путь завершился на насекомых, а второй привел к млекопитающим и человеку. Появление поперечно-полосатой мышцы и жесткого скелета стимулировало дальнейшее совершенствование управления движением путем развития оперативной сенсорной коррекции движений по текущей информации о внешней среде, т. е. адаптивного управления. Это в свою очередь вызвало дальнейшее совершенствование головного мозга. Другой важный этап эволюции — появление у земноводных конечностей, которые образовались из парных плавников при переходе к водно-наземному образу жизни. Это привело к дальнейшему усложнению и совершенствованию системы управления. К возникшей ранее системе управления локомоциями, построенной по сегментарному принципу, когда каждая часть туловища управляется соответствующей частью спинного мозга, добавилась система управления конечностями посредством импульсов от головного мозга (который управляет при этом и локомоциями в целом). Постепенно развилась сложная иерархическая система управления — экстрапирамидная двигательная система, в которой образовывались новые уровни управления, решающие все более сложные задачи и действующие через ранее воз- 284 Приложение 1 никшие уровни, вплоть до сегментарного управления через спинной мозг. Пределом совершенства такого управления являются птицы, которые обладают по сравнению с предшествующими им пресмыкающимися исключительной динамичностью и координацией движения. Однако это управление в целом является рефлекторным, т. е. инстинктивным. Соответственно и кора полушарий головного мозга у птиц осталась в зачаточном состоянии. Следующим качественно новым этапом явилось возникновение прямого, так называемого пирамидного пути управления мышцами от коры головного мозга параллельно многоуровневому и поэтому довольно медленно действующему экстрапирамидному пути. Этот канал управления движением взял на себя осуществление новых более сложных, быстрых и точных движений и привел в свою очередь к интенсивному развитию коры головного мозга. В результате возник новый тип управления — интеллектуальное, основанное на обучении посредством наблюдений, собственного опыта и выработки соответствующих новых алгоритмов поведения. Это достижение принадлежит млекопитающим. Далее приведены основные типы локомоций, возникшие в животном мире в процессе эволюции. 1. В воде. 1.1. Передвижение по дну: • путем подтягивания конца туловища к голове, затем перемещение вперед головы с выпрямлением туловища и т. д.; • с помощью щупалец, присасывающихся к поверхности и затем сокращающихся по длине. 1.2. Реактивное движение: • путем быстрого захлопывания створок раковин; • путем забора и резкого выброса воды (каракатицы, гребешки). 1.3. Гребки хвостом у рака. 1.4. Плавание рыб за счет волнообразных изгибаний тела и движений хвоста с использованием парных плавников как рулей глубины. 1.5. Плавание на поверхности воды. 1.6. Передвижение по поверхности воды (некоторые насекомые). 2. В воздухе. 2.1. Махание крыльями (птицы). 2.2. Планирование. 2.3. Парашютирование. 3. Под землей. 3.1. Путем раздвижки (бокового уплотнения) земли (черви). 3.2. Путем выбрасывания земли назад (кроты, мыши). Основные этапы развития движений в живой природе 285 4. По земле. 4.1. Ползание (змеи и др.). 4.2. Лазанье. 4.3. Хождение (с использованием разного количества ног). 4.4. Прыганье (на двух и четырех конечностях). 4.5. Бег симметричный, несимметричный, прыжковый, галоп и т. д. (с использованием разного количества конечностей). Последним этапом эволюции движения в живом мире явилось развитие манипуляционных способностей. Самым совершенным универсальным средством для этого стали руки человека. При дальнейшем развитии движений на первое место выступает уже не биологическое совершенствование отдельного человека, а значительно более интенсивное во времени его общественное развитие, включая разделение труда, с доведением до все большего совершенства профессиональных навыков и развитием орудий труда. И, наконец, завершением этого процесса стало создание дополняющих и заменяющих человека машин-роботов как универсальных средств для выполнения манипуляционных и локомоционных действий в производстве и других сферах человеческой деятельности. Дальнейшее совершенствование манипуляционных движений будет происходить, следовательно, уже в результате симбиоза человека и робота на основе развития робототехники и преодоления тех принципиальных ограничений, которые присущи человеку и живой природе в целом. 286 Приложение 1 ПРИЛОЖЕНИЕ 2 ОПИСАНИЕ ЭЛЕКТРОННОГО АРХИВА Электронный архив к книге выложен на FTP-сервер издательства по адресу: ftp://ftp.bhv.ru/9785977538510.zip. Ссылка доступна и со страницы книги на сайте www.bhv.ru. В архиве находится видеоприложение к книге — файл Osnovy_Robototechniki.avi. Для того чтобы посмотреть видеоприложение, необходимо иметь на вашем компьютере кодек DivX. Свободно распространяемую версию кодека можно скачать с сайта производителя по адресу http://www.divx.com/divx/download/index.php. 288 Приложение 1 ЛИТЕРАТУРА 1. Юревич Е. И. ЦНИИ РТК. История создания и развития. — СПб.: Изд-во СПбГТУ, 1999. 2. Бернштейн Н. А. О построении движений. — М.: Машиностроение, 1975. 3. Макаров И. М., Лохин В. М., Романов М. П. Система управления транспортным роботом с рекуперацией энергии // Пробл. машиностроения и моделирования в сложных технологических системах. — М.: МИРЭА, 1995. 4. Shahinpoor M. Artificial Muscles: New Mexico, ERI Press, Albuquerque, Pending Pulications, 1997. 5. Смирнов А. Б. Мехатроника и робототехника. Системы микроперемещений с пьезоэлектрическими приводами. — СПб.: Изд-во СПбГПУ, 2003. 6. Зенкевич С. Л., Ющенко А. С. Основы управления манипуляционными роботами. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. 7. Бурдаков С. Ф. Математические модели и идентификация роботов с упругими элементами. — СПб.: СПбГТУ, 1990. 8. Компьютерные технологии в науке. Моделирование и идентификация. — СПб.: СПбГПУ, 2007. 9. Корендсяев А. И., Соламандра Б. Л., Тывес Л. И. Теоретические основы робототехники. — М.: Наука, 2006. 10. Крутько П. Д. Управление исполнительными системами роботов. — М.: Наука, 1991. 11. Пятницкий Е. С. Принцип декомпозиции в управлении механическими и электромеханическими системами // Синтез систем управления манипуляционными роботами на принципе декомпозиции. — М.: ИПУ, 1987. 12. Попов А. В., Юревич Е. И. Роботы с силовым очувствлением. — СПб.: Астерион, 2008. 13. Макаров И. М., Лохин В. М., Романов М. П., Манько С. В. Интеллектуальные системы управления. — М.: Наука, 1999. 290 Литература 14. Интеллектуальные роботы / Под ред. Е. И. Юревича. — М.: Машиностроение, 2007. 15. Дистанционно управляемые роботы и манипуляторы / Под ред. В. С. Кулешова и Н. А. Лакоты. — М.: Машиностроение, 1986. 16. Макарычев В. П., Юревич Е. И. Супервизорное управление космическими манипуляторами. — СПб.: Астерион, 2005. 17. Каляев И. А., Гайдук А. Р., Капустин С. Г. Распределенные системы планирования действий коллективом роботов. — М.: Янус-К, 2002. 18. Юревич Е. И. Основы проектирования техники. — СПб.: Изд-во Политехнического университета, 2012. 19. Станкевич Л. А., Юревич Е. И. Искусственный интеллект и искусственный разум в робототехнике. — СПб.: Изд-во Политехнического университета, 2012. ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ А Абсолютные координаты 92 Автоколебания 142 Адаптивная подстройка привода 124 Аксон 19, 21 Андроид 5, 11 Анизотропный элемент (диск) 20 АСУ (автоматизированная система управления) 185 Б База знаний 168 Биоробот 270 Биотехническая система управления 185 Быстродействие манипулятора 43 В Внутренняя адаптация 163 Волокна 20 Г ГАП (гибкие автоматизированные производства) 227 Гидравлические приводы 78 Гуманоидный робот 11 Д Движение с постоянной скоростью 114 Движитель 59 Демпфер 80 Дендрит 18 Донный робот 265 Дуальное управление 120 З Задача идентификации 110 Задающий манипулятор 187 Захватное устройство 55 И Иерархическая адаптация 162 Изотропный элемент 20 Инверсный регулятор 145 Инспекционная система 259 Интегральный робот 10 Интеллектуальный робот 10 Интерактивное управление 194 Исполнительный манипулятор 187 Исчисление предикатов 169 К Квазиоптимальные алгоритмы 123 Кинематическая схема 48, 53, 54 Колебательность 123, 124, 217 Комбинированное управление 194 Кориолисова сила 115 Л Логика нечеткая 172 Локомоция 17, 31, 284 М Манипулятор 42, 44–46, 53, 74, 76, 90, 98 Манипуляция 17, 31 Метод "замороженных" коэффициентов 108 Модель семиотическая 172 292 Модульный принцип построения 218 Мотивация 34 Мотонейрон 21 Мышцы-антагонисты 22 МЭМС (микроэлектромеханическая система) 269 Н Напланетный робот 65 Нейрон 18 ◊ формальный 176 О Околороботная оснастка 216 Относительные координаты 93 Охранное торможение 109 Очувствление 162 Очувствленный робот 9 П Параметрическая адаптация 162 Память ассоциативная 174 ПД-регулятор 149 Педипуляторы 61 ПИД-регулятор 138, 150 Плавание 64 Пневматические приводы 78 Пневмоцилиндр 79 Поворотный пневматический двигатель 79 Подвижность робота 43 Позиционно-скоростное управление 193 Привод 49, 51, 105 Привязной робот 265 Принцип ◊ агрегатного построения 219 ◊ базового изделия 219 Промышленный робот (ПР) 41, 221 Противовесы 101 Пьезопривод 87 Р Рабочая зона манипулятора 42 Рабочий инструмент 58 Разгон 84, 114 Рекуперация энергии 84, 117 Релейное управление 115, 131 Рефракторный период 19 Рецептор 22 Предметный указатель Робастная система управления 137, 143 Робот ◊ вспомогательный 42 ◊ мобильный 43 ◊ напланетный 66 ◊ специализированный 42 ◊ специальный 42 ◊ технологический 41 ◊ универсальный 42 Роботизированный технологический комплекс (РТК) 241 РТС (робототехнические системы) 257 С САУ (система автоматического управления) 185 Свободно плавающий робот 265 Семантические сети 169 Сети фреймов 169 Сеть нейронная 176 Сило-позиционно-скоростное управление 193 Синапс 19, 21 Система технического зрения (СТЗ) 9 Следящие приводы 188 Стандартизация 217 Степени подвижности 44 Структурная адаптация 162 Схват 55 Схема с эталонной моделью 124 Т Телерецептор 283 Технологическая линия (ТЛ) 223 Технологическая система 259 Технологическая ячейка (ТЯ) 223 Технологический участок (ТУ) 223 Торможение 84, 114 Точность ◊ манипулятора 43 ◊ робота 43 Транспьютер 202 У Унификация 217 Управление ситуационное 171 Управляемая деформация 53 Упругие деформации 115 Предметный указатель Упругость 117 ◊ распределенная 102 ◊ сосредоточенная 102 Уравнение Лагранжа второго рода 94, 104 Устройство ◊ управления робота 73 ◊ уравновешивания 49 УЧПУ (устройство числового программного управления) 209 Ф Фузификатор 173 Ц Цех 223 Цикловое управление 210 293 Ч Человеко-машинная система управления 185 Ш Шагание 43, 61 Штабелер 205 Э Экзоскелетон 10, 253 Экстремальные условия 257 Электрические приводы 78 Эффект отражения усилия 188