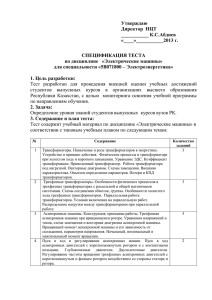
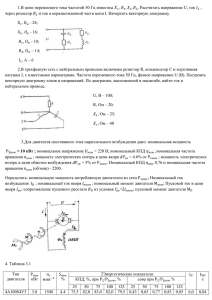
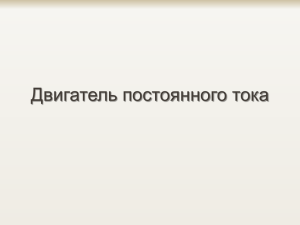
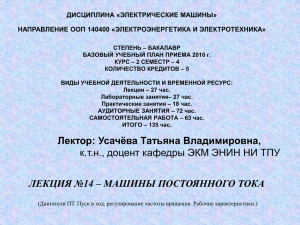
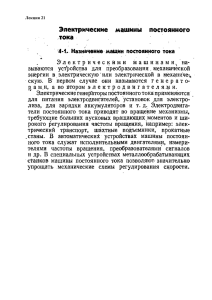
Институт авиационной и ракетно-космической техники Кафедра эксплуатации авиационной техники Реферат на тему: «Расчёт характеристик двигателя постоянного тока последовательного возбуждения» Самара 2022 СОДЕРЖАНИЕ 1 Определение начальных данных ........................................................................ 3 2 Расчёт характеристик ........................................................................................... 4 2.1 Определение номинального электромагнитного момента ........................... 4 2.2 Расчёт естественной механической характеристики ..................................... 5 2.3 Расчёт семейства искусственных механических характеристик при реостатном регулировании частоты вращения .................................................. 11 2.4 Расчёт искусственной механической характеристики при полюсном регулировании частоты вращения ....................................................................... 13 2.5 Электрическая схема подключения электродвигателя к сети .................... 15 3 Заключение ......................................................................................................... 16 2 1 Определение начальных данных Для варианта №5 имеются следующие начальные данные: - типоразмер двигателя: ЭДР-10,2; - режим работы: часовой; - номинальная механическая мощность на валу электрического двигателя (𝑃ном ) равна 10,2 кВт; - номинальное напряжение питающей прикладываемое к выводам сети постоянного тока, обмотки якоря электродвигателя (𝑈ном ), равно 250 В; - номинальная частота вращения якоря электродвигателя (𝑛ном ) равна 500 об/мин; - электрическое сопротивление обмотки якоря (𝑅𝑎 ) равно 0,167 Ом; - электрическое сопротивление катушек главных полюсов (𝑅гп ) равно 0,063 Ом; - электрическое сопротивление катушек добавочных полюсов (𝑅дп ) равно 0,229 Ом. 3 2 Расчёт характеристик 2.1 Определение номинального электромагнитного момента Суммарное электрическое сопротивление последовательной цепи обмотки якоря и полюсов 𝑅𝛴 (Ом) вычислим по формуле: 𝑅𝛴 = 𝑅𝑎 + 𝑅гп + 𝑅дп ; 𝑅𝛴 = 0,167 + 0,063 + 0,229 = 0,459 Ом. [Данная формула описывает эквивалентное сопротивление участка цепи, при этом учитывается только активная составляющая сопротивления. Формула отражает способ последовательного соединения элементов цепи, соответственно, может быть применена только для участка цепи с последовательным соединением элементов.] Номинальную угловую скорость вращения якоря электродвигателя 𝛺ном (рад/с) определим по формуле: 𝛺ном = 𝜋 × 𝑛ном , 30 где 𝜋 – математическая константа. 𝛺ном = 3,14 × 500 = 52,3 рад/с. 30 [Данная формула описывает угловую скорость вращательного движения, при этом считается, что значения параметров установились и соответствуют номинальным. Формула отражает преобразование одних единиц измерения скорости вращательного движения (об/мин) в другие 4 (рад/с), соответственно, может быть применена только для вращательного движения.] Номинальный электромагнитный момент, развиваемый на валу электродвигателя 𝑀ном (Н×м), рассчитаем по формуле: 𝑀ном = 𝑀ном 𝑃ном ; 𝛺ном 10,2 × 103 = = 195 Н × м. 52,3 [Данная формула описывает развиваемую механическую мощность при вращательном движении, при этом считается, что значения параметров установились и соответствуют номинальным. Формула отражает действие момента силы на угловом расстоянии, соответственно, может быть применена только для вращательного движения.] 2.2 Расчёт естественной механической характеристики В общем виде уравнение механической характеристики электродвигателя постоянного тока выглядит следующим образом: 𝛺= 𝑈 𝑅𝛴 + 𝑅д − 2 × 𝑀, 𝐶 × 𝛷 𝐶 × 𝛷2 где 𝛺 – текущая угловая скорость электродвигателя, рад/с; 𝑈 – напряжение питающей сети, В; 𝐶 – конструктивный коэффициент; 𝛷 – магнитный поток, Вб; 𝑅д – добавочное сопротивление в цепи якоря, Ом; 𝑀 – текущий электромагнитный момент на валу электродвигателя, Н×м. 5 [Данная формула описывает изменение угловой скорости в зависимости от усилий на валу электродвигателя, при этом не учитывается направление вращения. Формула отражает закон Ома, и применима только в том случае, когда зависимость напряжения от тока имеет линейный характер.] Электромагнитный момент, развиваемый электродвигателем постоянного тока, описывается следующим выражением: 𝑀 = 𝐶 × 𝛷 × 𝐼𝑎 , где 𝐼𝑎 – ток в обмотке якоря, А. [Данная формула описывает изменение величины усилий на валу электродвигателя, при этом не учитывается направление вращения. Формула отражает закон Ампера, соответственно, применима только для замкнутого токоведущего проводника.] Связь тока якоря и магнитного потока может быть описана следующим выражением: 𝐼𝑎 = 𝐾 × 𝛷, где 𝐾 – коэффициент пропорциональности. [Данная формула описывает ток в обмотке якоря электродвигателя, при этом предполагается, что магнитная система не насыщена. Формула отражает соотношение величины тока якоря, являющегося по совместительству током возбуждения, и величины магнитного потока, и может быть применима только по отношению к электродвигателю постоянного тока последовательного возбуждения.] Получим выражение для магнитного потока следующим образом: 𝑀 = 𝐶 × 𝛷 × 𝐾 × 𝛷 = 𝐶 × 𝐾 × 𝛷2; 6 𝑀 𝛷=√ . 𝐶×𝐾 Подставим полученное выражение для магнитного потока в уравнение механической характеристики и получим уравнение следующего вида: 𝛺= 𝑈 𝑀 𝐶 × √𝐶 × 𝐾 𝑅𝛴 + 𝑅д − 𝐶2 × √ 𝑀 𝐶×𝐾 2×𝑀 = 𝑈 𝐶 √𝑀 × √ 𝐾 − 𝑅𝛴 + 𝑅д 𝐶 𝐾 Введём следующее обозначение: 𝐴= Подставим введённое 𝐶 𝐾 обозначение в уравнение механической характеристики и получим уравнение следующего вида: 𝛺= 𝑈 𝐶 √𝑀 × √ 𝐾 − 𝑅𝛴 + 𝑅д 𝑈 𝑅𝛴 + 𝑅д = − 𝐶 𝐴 √𝑀 × √𝐴 𝐾 Введём следующее обозначение: 𝑋 = √𝐴 Подставим введённое обозначение в уравнение характеристики и получим уравнение следующего вида: 𝛺= 𝑈 √𝑀 × √𝐴 − 𝑅𝛴 + 𝑅д 𝑈 𝑅𝛴 + 𝑅д = − 𝐴 𝑋2 𝑋 × √𝑀 7 механической Полученное уравнение механической характеристики приведём к виду обычного квадратного уравнения: 𝛺= 𝑋2 − 𝑈 𝑋 × √𝑀 𝑈 𝛺 × √𝑀 − 𝑋+ 𝑅𝛴 + 𝑅д ; 𝑋2 𝑅𝛴 + 𝑅д = 0. 𝛺 Корни полученного квадратного уравнения имеют следующий вид: 𝑈2 𝑅𝛴 + 𝑅д √ 𝑋1 = − − ; 4 × 𝛺2 × 𝑀 𝛺 2 × 𝛺 × √𝑀 𝑈 𝑈2 𝑅𝛴 + 𝑅д 𝑋2 = +√ − . 4 × 𝛺2 × 𝑀 𝛺 2 × 𝛺 × √𝑀 𝑈 Определим значения полученных корней из условия номинального режима работы: 𝑋1 = 𝑈ном 2 × 𝛺ном × √𝑀ном −√ 2 𝑈ном 𝑅𝛴 + 𝑅д − ; 2 4 × 𝛺ном × 𝑀ном 𝛺ном 2502 0,459 + 0 𝑋1 = −√ − = 0,0279; 4 × 52,32 × 195 52,3 2 × 52,3 × √195 250 𝑋2 = 2 𝑈ном 𝑅𝛴 + 𝑅д +√ − ; 2 4 × 𝛺ном × 𝑀ном 𝛺ном 2 × 𝛺ном × √𝑀ном 𝑈ном 8 2502 0,459 + 0 √ 𝑋2 = + − = 0,3144. 4 × 52,32 × 195 52,3 2 × 52,3 × √195 250 Механическая характеристика для обоих корней будет выглядеть следующим образом: 𝛺1 = 𝛺1 = Для того чтобы 𝑋1 × √𝑀 − 𝑈 0,0279 × √𝑀 𝛺2 = 𝛺2 = 𝑈 𝑈 𝑋2 × √𝑀 − 𝑈 0,3144 × √𝑀 выбрать 𝑅𝛴 + 𝑅д ; 𝑋12 − 𝑅𝛴 + 𝑅д ; 0,02792 𝑅𝛴 + 𝑅д ; 𝑋22 − 𝑅𝛴 + 𝑅д . 0,31442 нужное выражение механической характеристики, определим пусковой электромагнитный момент 𝑀п (Н×м) по обеим характеристикам (при этом частоту вращения принимаем равной нулю): 2 𝑀п′ 𝑀п′ 0,0279 × 𝑈 =( ) ; 𝑅𝛴 + 𝑅д 0,0279 × 250 2 =( ) = 231 Н × м; 0,459 + 0 2 0,3144 × 𝑈 𝑀п′′ = ( ) ; 𝑅𝛴 + 𝑅д 9 𝑀п′′ Из 0,3144 × 250 2 =( ) = 29324 Н × м. 0,459 + 0 физических характеристику, соображений так как выбираем вторую электродвигатели механическую постоянного тока последовательного возбуждения должны обладать большим пусковым моментом и, следовательно, большой перегрузочной способностью. Таким образом, окончательно естественная механическая характеристика электродвигателя постоянного тока запишется следующим выражением: 𝛺= Рассчитаем электродвигателя 𝑈 0,3144 × √𝑀 естественную постоянного − 𝑅𝛴 0,31442 механическую тока характеристику последовательного возбуждения. Результаты расчёта сведём в таблицу 1. Таблица 1 – Результаты расчётов естественной механической характеристики 𝑀, Н × м 𝛺, рад/с 25 50 154,4 107,8 75 100 150 195 250 87,2 74,9 60,3 52,3 45,6 График естественной механической характеристики электродвигателя постоянного тока последовательного возбуждения, в соответствии с рисунком 1, выглядит следующим образом. 10 180 Ω, рад/с 160 140 120 100 80 60 40 20 M, Н×м 0 0 50 100 150 200 250 300 Рисунок 1 – Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения 2.3 Расчёт семейства искусственных механических характеристик при реостатном регулировании частоты вращения Реостатное регулирование частоты вращения осуществляется путём введения добавочного сопротивления 𝑅д в цепь якоря. Таким образом, искусственная механическая характеристика электродвигателя постоянного тока запишется следующим выражением: 𝛺= 𝑈 0,3144 × √𝑀 − 𝑅𝛴 + 𝑅д 0,31442 Рассчитаем семейство искусственных механических характеристик электродвигателя постоянного тока последовательного возбуждения для трёх случаев реостатного регулирования тока якоря: 11 𝑅д1 = 𝑅𝛴 ; 𝑅д2 = 2 × 𝑅𝛴 ; 𝑅д3 = 3 × 𝑅𝛴 . При этом полагаем, что в процессе изменения добавочного сопротивления в цепи обмотки якоря, напряжение на зажимах якорной обмотки электродвигателя остаётся неизменным и равным номинальному. Результаты расчёта сведём в таблицу 2. Таблица 2 – Результаты расчётов искусственных механических характеристик 𝑀, Н × м 25 50 𝑅д = 0,459 Ом 149,7 103,2 75 100 150 195 250 82,5 70,2 55,6 47,7 41 𝛺, рад/с 𝑅д = 0,918 Ом 145,1 98,5 77,9 65,6 51 43 36,4 𝑅д = 1,377 Ом 140,5 93,9 73,2 60,9 46,4 38,4 31,7 График семейства искусственных механических характеристик электродвигателя постоянного тока последовательного возбуждения при реостатном регулировании частоты вращения, в соответствии с рисунком 2, выглядят следующим образом. 12 160 Ω, рад/с 140 120 100 80 Rд=RΣ 60 Rд=2×RΣ 40 Rд=3×RΣ 20 M, Н×м 0 0 50 100 150 200 250 300 Рисунок 2 – Семейство искусственных механических характеристик двигателя постоянного тока последовательного возбуждения при реостатном регулировании частоты вращения 2.4 Расчёт искусственной механической характеристики при полюсном регулировании частоты вращения Так как в электродвигателе постоянного тока последовательного возбуждения один и тот же ток протекает по обмотке якоря и по обмотке возбуждения, электромагнитный момент определяется квадратом магнитного потока возбуждения, и, следовательно, при уменьшении магнитного потока возбуждения в два раза коэффициент 𝑋 в выражении для механической характеристики уменьшится в √2 раз. В таком случае, выражение механической характеристики электродвигателя будет выглядеть следующим образом: 13 𝛺= 𝑈 𝑅𝛴 𝑈 × √2 2 × 𝑅𝛴 − = − 0,3144 0,31442 0,3144 × √𝑀 0,31442 × √𝑀 2 √2 (√2) Рассчитаем искусственную механическую характеристику электродвигателя постоянного тока последовательного возбуждения при уменьшении магнитного потока возбуждения в два раза. Результаты расчёта сведём в таблицу 3. Таблица 3 – Результаты расчётов искусственной механической характеристики 𝑀, Н × м 25 𝛺, рад/с 50 75 100 215,6 149,7 120,6 103,2 150 195 250 82,5 71,2 61,8 График искусственной механической характеристики электродвигателя постоянного тока последовательного возбуждения, в соответствии с рисунком 3, выглядит следующим образом. 250 Ω, рад/с 200 150 100 50 М, Н×м 0 0 50 100 150 200 250 300 Рисунок 3 – Искусственная механическая характеристика двигателя постоянного тока последовательного возбуждения при полюсном регулировании частоты вращения 14 2.5 Электрическая схема подключения электродвигателя к сети Электрическая схема включения электродвигателя постоянного тока последовательного возбуждения в сеть, в соответствии с рисунком 4, выглядит следующим образом. Rд – добавочное сопротивление в цепи обмотки якоря; M – обмотка якоря электродвигателя; ОВ – последовательная обмотка возбуждения; Rдв – добавочное сопротивление, шунтирующее обмотку возбуждения. Рисунок 4 – Электрическая схема включения электродвигателя постоянного тока последовательного возбуждения в сеть 15 3 Заключение Основными элементами конструкции электрической машины постоянного тока являются: индуктор, главные и дополнительные полюса с обмотками, сердечник якоря с обмоткой, щёточно-коллекторное устройство, подшипниковые щиты. Коллектор состоит из медных пластин, изолированных друг от друга диэлектрическими прокладками. Пластины, вместе с прокладками, составляют кольцо, которое скрепляется с помощью нажимных фланцев, стянутых стяжными болтами. От нажимных фланцев пластины коллектора изолируются диэлектрическими коллекторными манжетами. Собранный коллектор крепится на валу двигателя с помощью шпонки. К каждой пластине коллектора присоединяются соединительные проводники от обмотки якоря. Щёткодержатели укрепляются на щёточных пальцах. На каждом щёточном пальце обычно помещают несколько щёткодержателей со щётками, работающими параллельно. Щёточные пальцы, число которых обычно равно числу главных полюсов, крепятся к щёточной траверсе и электрически изолируются от неё. Траверса крепится к неподвижной части электрической машины. Обычно предусматривают возможность поворота траверсы для установки щёток в правильное положение. Полярности щёточных пальцев чередуются. Все пальцы одной полярности соединяются между собой сборными шинами. Шины, с помощью отводов, соединяются с выводными зажимами. Коллектор предназначен для превращения потребляемого из внешней цепи постоянного ток в переменный ток в обмотке якоря. Щётки предназначены для передачи электрического тока на вращающийся коллектор от неподвижной внешней цепи. Механическая характеристика электродвигателя — это зависимость установившейся частоты вращения развиваемого электродвигателем. 16 от электромагнитного момента, Под естественной механической характеристикой понимают такую характеристику, которая была снята при номинальном напряжении сети, номинальном потоке возбуждения и при отсутствии добавочных сопротивлений в цепи якоря. Если хотя бы одно из вышеперечисленных условий не выполняется – снятая механическая характеристика считается искусственной. Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения имеет вид показательной функции, так как скорость вращения обратно пропорциональна корню квадратному от электромагнитного момента. Её достоинства: высокий пусковой момент, возможность изменения момента нагрузки в широких пределах при сравнительно небольшом изменении скорости вращения. Способы регулирования частоты вращения электродвигателя постоянного тока: - якорный (путём изменения величины напряжения питающей сети); - полюсный (путём изменения величины магнитного потока); - реостатный (путём введения добавочного сопротивления в цепь якоря). Реостатное регулирование частоты вращения осуществляется путём включения последовательно в цепь якоря реостата. В зависимости от сопротивления реостата, та или иная часть мощности, подводимая от питающей сети к обмотке якоря, будет рассеиваться в реостате, а оставшаяся часть мощность будет потребляться электродвигателем. К достоинствам реостатного способа регулирования можно отнести простоту и относительную дешевизну реализации. К недостаткам можно отнести невозможность увеличения скорости выше номинальной и снижение КПД электродвигателя. Полюсное регулирование частоты вращения осуществляется путём шунтирования обмотки возбуждения переменным сопротивлением. В зависимости от величины шунтового сопротивления, через обмотку возбуждения будет протекать определённый ток возбуждения, от величины которого будет зависеть величина потока возбуждения, от чего, в свою 17 очередь, будет зависеть скорость вращения электродвигателя. К достоинствам полюсного способа регулирования можно отнести возможность увеличения скорости выше номинальной, слабое влияние на КПД электродвигателя, простоту и относительную дешевизну реализации. К недостаткам можно отнести невозможность уменьшения скорости ниже номинальной, потенциальную возможность вывода машины из строя в следствии превышения максимальной допустимой скорости. Двигатели последовательного возбуждения не имеют жёстких эксплуатационных ограничений. Они позволяют регулировать свой режим работы широких пределах и имеют большую устойчивость к перегрузкам. Двигатели параллельного (независимого) возбуждения имеют жёсткие эксплуатационных ограничения. Они поддерживают номинальный режим и не позволяют производить весомых регулировок режима работы. 18