liberman-yakov-povyshenie-tehnologicheskoy-nadezhnosti-kontrolno-sortirovochnyh-avtomatov-320223
реклама

Я. Л. Либерман
ПОВЫШЕНИЕ
ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ
КОНТРОЛЬНО - СОРТИРОВОЧНЫХ
АВТОМАТОВ
Я.Л.Либерман
ПОВЫШЕНИЕ ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ
КОНТГОЛЬНО-СОРМРОВОЧНЫХ АВТОМАТОВ
. Свердловск
Издательство Уральского университета
1990
УДК 658.5.ОН.56
Л 551
Рецензента: лаборатория Всесоюзного научно-исследовательско­
го института метрологии стандартных образцов;
доктор технических наук, профессор
С.А.Тимашев
Л 551 Либерман Я.Л.
Повышение технологической надежности
контрольно-сортировочных автоматов. Свердловск:
Изд-во Урал, ун-та, 1990. 132 с.
J56/V 5-7525-0207-1
В книге рассматриваются расчетные, эксплуатационтае и дру­
гие современные методы повышения технологической надежности ав­
томатов для многодиапазонного контроля и сортировки. Предлагает­
ся обобщенны., показатель качества втомата ,i исследуется его за­
висимость от надежности, описываются новые технические решения
■ изобретения, обеспечивающие повышение технологической надеж­
ности автоматов.
Для научных и инженерно-технических работников, может быть
полезна ^спирантам и студентам, интересующимся проблемами авто­
матизации производства.
Ил. 28. Табл. 2.
Библиогр.: 52 назв.
Редактор Т.В.Мамонтова
Л-2405одоооо-г?-----182(02)-90
с
Я.Л.Либерман, 1990
ВВЕДЕНИЕ
Одной из основных задач, стоящих перед машиностроением, яв­
ляется разработка и осуществление мероприятий по повышению дейс­
твенности систем контроля качества и технического уровня выпус­
каемой продукции, что связано с необходимостью повышения точнос­
ти и надежности приборов, используемых при контроле качества, а
также с развитием производства автоматического оборудования с
электронными и другими системами контроля. В соответствии с этим
в настоящее время во многие отрасли машиностроения все шире вне­
дряются быстродействующие контрольно-сортировочные автоматы,
осуществляющие контроль качества деталей по различным парамет­
рам, сортировку годных деталей по группам, отбраковку некачествен
*
1
ных деталей, блокировку или подналадку технологического оборудо­
вания.
Контрольно-сортировочные автоматы наиболее эффективны в мас­
совом производстве, когда техническими условиями предусмотрен
сплошной контроль качества выпускаемой продукции. Без применения
автоматов число контролеров ОТК в таком производстве составляет
около 15% общего числа рабочих. Это требует значительных расхо­
дов, повышающих себестоимость продукции, снижает производитель­
ность и достоверность контроля, так как работа контролеров-сор­
тировщиков требует высокой концентрации внимания и сопровождае
ся снижением производительности труда к концу смены более чем на
25% при увеличении числа ошибок почти в 5 раз. Внедрение же одно­
го автомата, контролирующего и сортирующего 1800 деталей в час,
дает возможность высвободить до пяти контролеров, что снижает
себестоимость контрольно-сортировочных операций, повышает их
объективность и избавляет людей от напряженного и монотонного
труда.
Разработкой и производством контрольно-сортировочных авто­
матов занимаются многие организации и предприятия. Это прежде
всего ОКБ СА Минстанкинпрома СССР, инструментальный завод "Ка­
либр", Ленинградский инструментальный завод, ВНИИПП, научно-ис­
следовательские и проектные институты автомобильной промышленнос­
ти и сельскохозяйственного машиностроения. В этом же направлении
ведутся работы в МВТУ им. Н.Э.Баумана,
Львовском, Уральском и
других политехнических институтах.
Современные "онтрольно-сортировочные автоматы снабжень, слож-
3
HHM^f механическими и электрическими устройствами для загрузки и
тр депортирования деталей, измерения их параметров, переработки
контрольной информации и т.д. Многие из них оснащены специальны­
ми логическими устройствами. В связи с этим для эффективного ис­
пользования контрольно-сортировочных автоматов необходимо прини­
мать специальные меры для повышения их надежности. Это тем более
необходимо, так как с помощью контрольно-сортировочных гзтоматов
зачастую осуществляется контроль готовой продукции и производит­
ся окончательная оценка ее качества.
Методы повышения надежности контрольно-сортировочных авто­
матов разрабатываются., главным образом ,теми же организациями,
которые непосредственно занимаются созданием таких автоматов.
Они весьма разнообразны и многочисленны. Часть этих методов уже
достаточно хорошо известна специалистам, другие же являются но­
выми и широкой известности пока еще не получили. Учитывая это,
автор счел целесообразным включить в книгу лишь новые методы, направл иные на повышение технологической надежности контрольно-со­
ртировочных автоматов, в частности, методы, разработанные в Ура­
льском политехническом институте. Ь их число входят проектные и
эксплуатационные, организационные и технические, расчетно-анали.ические и аппаратурные метода. На их основе могут более эффектив­
но использоваться уже существуюшче автоматы и разрабатываться но­
вые. По принципам, описанным в книге, могут строиться система ав­
томатической еамоЖстройки и адаптации автоматов, а также систе­
мы группового управления контрольно-сортировочными автоматами от
ЭВМ, осуществляющие расчет требуемой настройки автоматов, контооль настройки и поднастройку.
Книга предназначена для специалистов, связанных с разра­
боткой и эксплуатацией контрольно-сортировочных автоматов. Све­
дения, приведенные в ней, могут быть использованы также приме­
нительно к контрольным приборам и средствам цифровой измеритель - 1
ной техники.
Пользуясь случаем, гтор благодарит инженера В.П.Метелькова за помощь в < формлении рукописи.
4
Глава I.
I.I.
КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ И РОЛЬ
НАДЕЖНОСТИ В ПОВЫШЕНИИ ЕГО КАЧЕСТВА
Принципы контроля и структура контрольно­
сортировочного автомата как системы управления
Как известно, свойство, общее в качественном отношении
многим физическим объектам, но в количественном отношении инди­
видуальное для каждого объекта, называется физической величиной.
Когда хотят подчеркнуть математический смысл физической величи­
ны, вместо этого термина употребляют термин "параметр", что оз­
начает некоторую переменную, принимающую при определенных усло­
виях постоянное значение.
Физические величины или параметры, встречающиеся в практи­
ке, чрезвычайно разнообразны. К ним, например, относятся геоме­
трические размеры, твердость, масса и шероховатость поверхности
изделий, полученных обработкой резанием; влажность, температура
и давление воздуха; активное и реактивное сопротивление электри­
ческих проводников и др. Однако, несмотря на разнообразие, все
физические величины и параметры характеризуются одинаково - сво­
ими значениями, с помощью которых и производится контроль.
Различают три вида указанных значений: истинное, действи­
тельное и нормативное. Под истинными значениями физических вели­
чин или контролируемых параметров понимаются такие значения, ко­
торые идеальным образом отражали бы в качественном и количест­
венном отношениях соответствующие свойства объекта. Действительныезначёнйя физических величин или параметров представляют собой
значения, найденные экспериментальным путем и настолько прибли­
жающиеся к истинным, что могут быть использованы вместо них. Что
же касается нормативных значений физических величин или парамет­
ров, то в практике под ними имеют в виду-значения, которые пред­
писаны соответствующих., документом, например чертежом или техни­
ческими условиями, и в качественном и количественном отношениях
отражают требуемые свойства объекта.
Как следует из законов природы, установить истинное значе­
ние контролируемого параметра никакими способами невозможно. Дей­
ствительное же значение можно найти путем измерения, поскольку
измерение представляет собой нахождение значения физической ве­
личины опытным путем с помощью технических средств.
5
Учитывая это, под контролем обычно понимают совокупность
следующих трех операций: измерение некоторой физической величи­
ны или параметра объекта; сравнение действительного значения
этого параметра с нормативным значением; формирование суждения
о наличии или отсутствии требуемого свойства объекта.
Суждение при контроле может формироваться по-разному:
в простейшем случае - согласно выражениям
Х{=0 < Х^ Хг^ А< ,
Хг < Х< Хз = о° =>Аг ,
(II)
в более сложном случае - в соответствии с выражениями
Х/ = -оо<х^х2=>
f
Xг X Х3
Аг,
Хз < X < Xi/ = + 00 ^Аз ,
(1.2)
в еще более сложном - в соответствии с выражениями
Xj
X/ < X 4
А{ ,
Хг X $ X з А г ,
х'к '< Х ^'Хк^'^Ак,
Xn-i < X
Хп
(1'3)
А п-<.
В этих выражениях X
~ действительное значение контроли­
руемого параметра; X < > Хг и Т-Д- ~ нормативные значения это­
го параметра;
, Дг и т.д. - обозначение различных суждений,
а
> - знак логического следствия. Если контроль ведется с
использованием выражения (I.I), то его называют допусковым одно­
предельным. Так контролируют, например, несоосность отверстий,
неперпендикулярность различных поверхностей и т.п. Если использу­
ется (1.2), то контроль называют допусковым двухпредельным. Он
применяется, в частности, для таких параметров, как погрешность
длины или диаметра деталей, избыточное давление и пр. Если же
используется (1.3), то контроль называют многодиапазонным или
многоинтервальным и применяют его для тех же параметров, что и
допусковый двухпредельный. При этом нормативные значения контро­
лируемого параметра называют граничными, разность между двумя со­
седними граничными значениями именуют шириной интервала контроля
или классификации, а сам интервал обозначают как [Хк,Хл+/].
Все перечисленные разновидности контроля могут быть реализо­
ваны на практике в виде систем контроля, представляющих собой со-
6
иокупность средств, с помощью которых производятся контрольные
и сопутствующие им (например, установочные) операции.
Системы контроля могут быть неавтоматизированные', полуавто­
матические и автоматические. В первых из них более 50% общего
времени, необходимого для выполнения контроля, расходуется на
ручные операции. Такие системы малопроизводительны и используюся, главным образом, для допускового контроля. В полуавтомати­
ческих системах доля ручных операций составляет Ь-50%, а в авто­
матических - менее 5%. Многодиапазонный контроль в подавляющем
большинстве случаев ведется с помощью именно этих систем, поско­
льку их производительность значительно выше, чем у неавтоматизи­
рованных систем.
Характерной особенностью систем контроля является представ­
ление суждения в форме сигнала. В неавтоматизированных системах,
где операции сравнения и формирования суждения выполняются чело­
веком это может быть естественная человеческая речь, в полуавто­
матических и автоматических системах - определенное изменение эле­
ктрического тока, напряжения, загорание лампочки и т.п. В общем
же случае сигналом может служить всякое обусловленное (заранее
договоренное) изменение состояния материальной среды, способное
распространяться в пространстве.
Распространение сигнала в пространстве называется его пере­
дачей. В результате передачи сигнал может тем или иным образом
воздействовать на различные устройства. Если это воздействие яв­
ляется преднамеренным и обеспечивает целенаправленное функциони­
рование устройства, то оно называется управлением, а само устрой­
ство - объектом управления. Понятие объекта управления принципи­
ально отличается от понятия объекта контроля. В то время как в
объекте контроля процесс контроля никаких изменений не вызывает,
в объекте управления под воздействием сигнала изменения происхо­
дят обязательно, чем и достигается его целенаправленное функцио­
нирование.
Одним из наиболее распространенных видов объектов управле­
ния являются рабочие машины - у:.-ройства, построенные на основе
механизмов и предназначенные для преобразования состояния, свойств,
формы для перемещения предметов труда человека. Перемещений по
заданному маршруту называется адресованием, а маи..;ны, осущест­
вляющие такое перемещение, - адресующими. Если адресование про7
изводится по специальным отсекам с целью разбиения партии объе­
ктов контроля на классы, такие, что любым двум объектам одного
класса соответствуют одинаковые, а любым двум объектам разных
классов - различные суждения, сформированные системой контроля,
то имеет место частный случай адресования, называемый сортиров­
кой. и адресующие машины называют сортировочными.
Подобно системам контроля сортировочные машины могут быть
неавтоматизированными, полуавтоматическими и автоматическими.
8 неавтоматизированных машинах управление сортировкой практичес­
ки полностью ручное. В полуавтоматических оно происходит без
участия человека, который только загружает изделия, подлежащие
сортировке, готовит машину к работе и пр. В автоматических же
сортировочных машинах без участия человека осуществляется как уп­
равление сортировкой, так и загрузка машины, а вручную выполняет­
ся только общая подготовка машины к работе, регулировка и т.п.
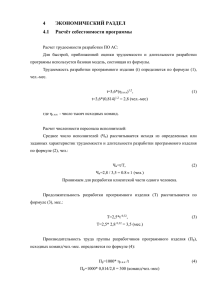
Если объединить систему контроля с сортировочной машиной,
то можно получить единый агрегат, выполняющий и контроль и сорти­
ровку. Такой агрегат, являющийся, по существу, системой управле­
ния, в которой функции управляющего устройства реализуются сис­
темой контроля, называют контрольно-сортировочной машиной и в са­
мом общем виде представляют с помощью блок-схемы, изображенной на
рис. 1,1., где СК - система контроля, СМ - сортировочная машина,
Й1
СО - сортировочные отсеки СМ, широкие
СМ
’ стрелки символизирую/ перемещение из­
СК
делий, подлежащих контролю и сортиров­
из
ке, а узкие стрелки обозначают ввод
Рис.I.I.Блок-схема коннормативного значения (НЗ) контролиру­
тро льно-со ртиро во чной
машины
емого параметра и передачу сигнала
(УС), соответствующего результатам контроля и управляющего сорти­
ровкой. В случае, когда перемещение изделий и передача сигнала
между составными частями контр эльно-сортировочной машины произво­
дятся с участием человека, то машину, в зависимости от степени
автоматизации контроля и сортировки,называют неавтоматизированной
или полуавтоматической. Если же для перемещения изделий и переда­
чи сигнала участие человека не требуется, причем составные части
машины автоматические, то всю контрольно-сортировочную машину в
целом также называют автоматической или контрольно-сортировочным
8
автоматом (КСА). Рассматривая КСА как систему управления, нетруд­
но его идентифицировать как вполне конкретную разновидность таких
систем. Так, если по характеру функционирования классифицировать
все системы управления на стабилизирующие, следящие и системы
программного управления, то КСА правомерно отнести к последним,
поскольку адресование объектов в тот или иной сортировочный от­
сек происходит в них всегда определенным образом по сигналам, со­
ответствующим определенным фиксированным значениям контролируемо­
го параметра, играющего роль программы. Если подразделять все
системы программного управления по характеру перехода из состоя­
ния в состояние на функциональные и позиционные, а по наличию об­
ратной связи - на разомкнутые и замкнутые, то, очевидно, КСА это позиционная разомкнутая система, так как переход из состояния
в состояние в нем происходит без управления законом перехода, а
обратная связь между сортировочной машиной и системой контроля
отсутствует.
1.2.
Производительность, коеффициент полезного действия
и обобщенный показатель качества контрольно­
сортировочного автомата
Для характеристики качества КСА чаще всего применяют следую­
щие показатели: точность, надежность, производительность.
Производительность КСА обычно представляют как способность
контролировать и сортировать определенное количество изделий за
определенное время и выражают в штуках в час с помощью периода
времени, необходимого для осуществления одного рабочего цикла.
Вообще в КСА, подобно тому, как это принято в других рабочих
машинах [2], можно ввделить несколько видов циклов: технологичес­
кий - последовательность всех операций и переходных процессов
между ними, периодически повторяющихся при контроле и сортировке
одного изделия; рабочий - совокупность операции и переходных
процессов, периодически повторяющихся при контроле и сортировке
изделий, одновременно находящихся в КСА,и другие, однако произ­
водительность КСА определяется именно временем рабочего цикла.
Указанное время может быть выражено как
Т?
i)rn<lx ’
(1.4)
где
- длительности операций и переходных процессов, npv адлежащих одному отрезку технологического цикла, состоящему из
операций и процессов, несовмещенных во времени. Если из рабоt го цикла КСА выделить операции контроля и адресования прокон­
тролированных изделий в сортировочные отсеки, для выполнения ко­
торых автомат специально и создается, то, обозначив время конт­
роля
и несовмещенное с ним время адресования ta, (1.4) мож­
но записать в виде
= ^к + ^а + i цп ,
(1.5)
где I цп - так называемые цикловые непроизводительные потери вре­
мени (потери на холостые движения механизмов автомата, переход­
ные процессы и т.п.). В зависимости от цикловых потерь различают
два вида производительности КСА - цикловую и технологическую.
Согласно теории производительности машин и труда, разработанной
Г.А.Шаумяном [49], цикловая производительность применительно к
КСА представляет собой количество изделий, контролируемое и сор­
тируемое автоматом в единицу времени при непрерывной его работе.
Эта производительность определяется при реальных
по формуле
п
/
'
Тр~ tx + ta + tw
(Е6)
и для большинства современных 1 ’А колеблется в пределах от 300
шт/ч до 20 000 шт/ч и более, в зависимости от сложности и мас­
сивности сортируемых изделий. Тех.-алогическая же производительность
представляет собой количество изделий, контролируемое и сорти­
руемое автоматом в единицу времени не только при непрерывной его
работе, но и при tцп= 0
, т.е. при отсутствии цикловых по­
терь.
Определяется она по формуле
(1-’>
и для большинства КСА равна 15 000 - 26 000 шт/ч., что показыва­
ет предел производительности, которого можно достичь, если лик­
видировать цикловые потери.
Чем ближе
к QT , тем лучше организован рабочий цикл
КСА. Поэтому наряду с величинами
и Q г , для характеристики
производительности КСА применяют также их отношение
'7(Т
Qr
=__
I_ ,
1 + Qrtu.n
10
( ( ;е.
называемое коэффициентом использования технологической произ­
водительности КСА или цикловым коэффициентом непрерывности кон-троля и сортировки? Коэффициент 7 т изменяется от 0 до I и сов­
местно с Q позволяет оценивать и сопоставлять различные кон­
структивные варианты КСА, однако ни он, ни
не дают возможноси учесть простей автомата - периоды времени, когда операции,
входящие в рабочий цикл КСА, не производятся. Между тем в резу­
льтате простоев производительность КСА в реальных производствен­
ных условиях оказывается существенно (иногда на 25-40%) ниже
что нельзя оставить без внимания. В связи с этим производитель­
ность КСА характеризуют еще и величиной, которая называется фак­
тической производительностью и представляет собой среднее коли­
чество изделий, контролируемое и сортируемое в единицу времени
с учетом простоев. Если длительность простоев, приходящуюся в
среднем на одно контролируемое изделие, рассматривать как неко­
торую условную добавку к 7р , то фактическую производительность
можно определить до формуле
Л
-
-----/------ т- = Оц=?0^т/
t к + ta + tun + tin
т
(1.9)
где iал- указанная добавка, называемая внецикловыми непроизво­
дительными потерями;
<1.10)
1 + Ци,18П
- величина, подобная 7 т и называемая коэффициентом испо­
льзования цикловой производительности дли коэффициентом н< пре­
рывности работы КСА;,
?ц~
- величина, называемая общим коэффициентом непрерывности
контроля и сортировки. Полагая, что
, где t j
- средняя длительность простоев КСА по ] -ой причине (например,
из-за ремонтов, перерывов в подаче изделий в КСА, из-за настрой-
* Этот коэффициент по своему смыслу близок к коэффициентам 7 с
и
, предложенным Б.М.Сорочкиным [зэ].
п •
ки, смазки и пр.), с помощью формул (1.9) - (I.II) и оценивают
об^ее снижение производительности КСА из-за простоев. По величи­
нам, входящим в эти формулы, можно определить и коэффициент по­
лезного действия КСА.
Коэффициент полезного действия КСА является разновидноство
коэффициента полезного действия рабочих машин (введенного в упо­
требление Г. А. Шаумяном) и связывает между собой точность, надеж­
ность, технологическую производительность и энергетические хара­
ктеристики КСА. Используя метод, предложенный Г.А.Шаумяном при
определении КПД машин с несовмещенными операциями, КПД КСА можно
представить в виде
ft
( КСА
- Ап _
'"Т“
As (М'/п)
“* / А
а
л
а \ кA f
(АМг+Аз+А^М
(II?)
* ***
/
Ао
где Ал- полезные затраты энергии на контроль и сортировку партии изделий объемом М i Ао ~ общие затраты энергии га контроль
и сор лровку указанной партии; Ai - полная энергия, расходуемая
за один рабочий цикл КСА на контроль и сортировку; Д2 и Аз энергия, расходуемая за один рабочий цикл на переходные процессы
и операции, совмещенные и несовмещенные во времени с контролем и
сортировкой; Ац- затраты энергии, сопряженные с внецикловыми по­
терями времени (с холостыми циклами и остановками КСА для коррек­
ции настройки, ремонтов и пр,); As - полезная энергия, затрачен­
ная за один рабочий цикл непосредс зенно на контроль и сортировку
■ (она равна энергии A i за вычетом потерь на трение, нагрев и
т.п.); Щ - количество неправильно рассортированных или неопоз. манных изделий из партии. Если учесть, что
A{+At+As+Ao = Ni(tK+ta)+(1,13)
И
As * Ns(tK + ta) ,
- средние мощности, соответствующие затратам энергии
> то (I.I2) можно записать как
. h
Ns(ix+ta)(M~m)_______ ___
(I.I4)
КСА [Ni(tK+ta) + Ni(tK+ ta) + Nsinn + Nii1вп]M
или, разделив числитель и знаменатель на М1\Ц(1кНа) >
Ни (М-т)
как
~
__________ /У<
М
______
(I.I5)
КСА
t Мз
Nt
Ni iK+ta
N< tx+tci
12
где
Здесь
- общепринятый КПД механизмов и электрической,
пневматической или гидравлической аппаратуры КСА, непосредствен­
но участвующих в -онтроле и сортировке;
= 0 - показатель
технологической надежности КСА, представляющей собой вероятность
работы КСА без ложной классификации и ложного адресования изде­
лий; -—~~ = QT
- технологическая производительность КСА.
1к + ta
Поэтому в окончательном виде
и
= ______________ УмРтх_____________ .
.
/ + ^j[Ni(tK+ tn)+Nitцл +МЫ]
Нетрудно заметить, что полученное выражение - несколько ви­
доизмененный общий коэффициент ней ерывности контроля и сортиров­
ки 7о > учитывающий надежность и точность КСА (последняя охва­
тывается понятиями точностной, а следовательно и технологичес­
кой нгцежности), а также степень совершенства механизмов и аппа­
ратуры КСА и характер распределения потребляемой мощности между
операциями, выполняемыми КСА. В частном случае при ^МРТХ = /,
О,
N( = /V3- N it коэффициент
вообще совпадает с 7кса • Это наталки­
вает на мысль об использовании КПД КСА для определения обобщенно­
го показателя качества автомата. Проще всего за указанный показа­
тель в соответствии с формулой (1.9) и со сходством Чкса и Ч д
принять значение
QT
, однако в таком случае значимость
всех показателей качества, входящих в 7кса$т > будет оди­
наковой. М жду тем на практике эта значимость различна, что проя­
вляется обычно в стремлении проектировщиков прежде всего увеличи­
вать надежность и точность КСА, затем повышать производительность
Таблица 1,1
Зависимость См от вида энергии,потребляемой контрольно-
сортировочными автоматами
Вид энергии
№
nZo,
I
Электроэнергия
2
Электроанергия и энергия сжатого
воздуха
3
Энергия сжатого воздуха
См
0,57.
0,71
' I
Примечание. Значения См получены расчетно-аналитическим методом
на основе стоимости энергопотребления автоматов.
13
Таблица 1.2
Значения Ср для различных групп машин, использующих
сортируемые изделия
>
п/п
Машины, выход которых из строя может
повлечь за собой
I
Гибель большого количества людей и большой
экономический ущерб (например, пассажирс­
кий авиа- и железнодорожный транспорт)
Отдельные человеческие жертвы и большой
экономический ущерб (например, оборудование
металлургических заводов, нефтегазодобываю­
щей промышленности)
Отдельные человеческие жертвы и умеренный
экономический ущерб (например, автомобильный транспорт, неавтоматическое об рудование машиностроительных заводов)
Большой экономический ущерб без человечес­
ких жертв (например, неставдартное автома­
тическое оборудование машиностроительных
заводов)
Большие потери из-за недовыпуска продукции
без человеческих жертв (например, стандар­
тное автоматическое оборудование заводов
электронной промышлености и приборострое­
ния)
2
3
4
5
СР
3
2,35
1,99
1,48
1,16
Примечание. Значения Ср получены методом экспертных оценок.
и сокращать потребляемую мощность, а затем уже повышать КПД ме­
ханизмов и пр. В связи с этим использовать
непосредственно
как обобщенный показатель качества КСА нельзя. Однако если ввес­
ти в это выражение коэффициенты См к Ср , учитывающие значимость
7 м и Ртх , обусловленные требованиями к механизмам и аппаратуре
КСА и степенью ответственности сортируемых изделий или последст14
виими от их ложной классификации и ложной сортировки, то получпннил так называемая приведенная производительность КСА таким
показателем может являться. Полагая, что одни и те же прираще­
ния
и Ртх более ценны при малых ?м и Ртх , чем при боль­
ших, коэффициенты См и Ср следует ввести в показатели степени
при ум и Ртх . что позволяет записать приведенную производи­
тельность КСА как
пСм -.Ср _
П _ ___________Ум Ртх Qr____________
Придавая См значения в диапазоне от 0 до I (табл. I.I), а
Ср - больше I (табл. 1.2), и рассчитывая Qn , можно оценивать
качество КСА, исходя из того, что чем больше Qn , тем автомат
лучше. При этом нетрудно установить и степень влияния величин,
входящих в (I.I7), на Qn и, в частности, величин, характеризу­
ющих надежность КСА.
1.3.
Категории надежности контрольно-сортировочного
автомата и их влияние на обобщенный показатель
качества
Надежность - это понятие, которое в наиболее общем случае
имеет следующий смысл: свойство объекта, заключающееся в его
способности выполнять определенные задачи в определенных услови­
ях эксплуатации [б]. Поскольку задачами КСА являются безошибоч­
ные контроль и сортировка, то применительно к КСА, надежность это, по существу, способность в определенных условиях правильно
контролировать и сортировать определенные изделия [зз].
Основным проявлением надежности КСА является отсутствие или
возникновение отказов - событий, заключающихся либо в невыполне­
нии контроля и сортировки (в остановках или холостых циклах КСА),
либо в неправильном их выполнении (в ложной классификации или
ложном адресовании изделия). В зависимости от причин возникнове­
ния отказы бывают трех категорий. К первой из них относятся от
казы, вызванные неисправностями аппаратуры и механизмов.КСА.
Такие отказы называются аппаратурными. Ко второй категории-отно­
сятся отказы, вызванные погрешностями контрольного устройства
КСА, Их называют точностными. И к третьей категорий относятся
отказы, вызванные интенсификацией режимов работы КСА (началом
последующих операций до гарантированного завершения переходных
процессов по окончании предыдущих операций). Эти отказы называ- .
ются режимными.
Соответственно существуют и три категории надежности КСА
- аппаратурная, точностная и режимная. Рассмотрим виды отказов и
некоторые особенности указанных категорий надежности.
Как показывает'опыт эксплуатации КСА, аппаратурные отказы
подразделяются на два вида - самоустраняющиеся (их еще называ­
ют сбоями) и несамоустраняющиеся. Сбои обычно представляют со­
бой ложные адресования изделий, порожденные самопроизвольными
нарушениями и такими же восстановлениями работоспособности сис­
тем контроля и переработки контрольной информации в КСА. Харак­
терным примером сбоев является временное залипание контактов ре­
ле, которое приводит к попаданию изделия не в тот сортировочный
отсек, в который требуется. Несамоустраняющиеся отказы представ­
ляют собой холостые циклы, остановки КСА и ложные адресования,
порожденные значительными загрязнениями, заклиниваниями и полом­
ками как систем контроля и переработки контрольной информации,
так и различных механизмов КСА. Например, при заклинивании изде­
лия во время его движения в загрузочном устройстве автомат сра­
батывает вхолостую, а при заклинивании или поломке устройств
транспортирования изделий внутри автомата последний остановит­
ся, причем в том и другом случае для устранения отказа потребу­
ется вмешательство наладчика.
Поскольку несамоустраняющиеся отказы охватывают большее '
число устройств, чем самоустраняющиеся, на первый взгляд кажет­
ся, что они в большей степени определяют надежность КСА, чем
■бои. Однако в действительности это не так. При надлежащем техни­
ческом обслуживании и соблюдении системы планово-предупредитель­
ных ремонтов несамоустраняющие. я Аппаратурные отказы возникают
редко, а те из них, которые приводят к ложному адресованию из­
делий, --весьма редко. Поэтому аппаратурную надежность КСА в бо­
льшинстве случаев определяют лишь сбои (отказы группы AI), либо
сбои и несамоустраняющиеся отказы, не вызывающие ложных адресо­
ваний (отказы группы А2).
Подобно аппаратурным отказам,'точностные отказы (отказы
16
группы Т) также подразделяются на самоустраняющиеся и несамоус­
траняющиеся. Самоустраняющиеся отказы обычно бывают вызваны
случайными погрешностями системы контроля КСА
*
а несамоустраняющиеся - систематическими, однако все точностные отказы вы­
ражаются одинаково - в ложной классификации изделий.
Что касается режимных отказов, то они представляют собой,
как правило, только сбои, которые выражаются либо в холостых
циклах КСА, либо в ложных адресованиях. При этом первые (отка­
зы группы Р2) в подавляющем большинстве случаев вызваны непо­
паданием изделий в захватные элементы загрузочного устройства
автомата или недостаточной производительностью механизмов тра­
нспортировки изделий внутри КСА, а вторые (отказы группы PI)
происходят в результате преждевременного попадания изделия в
механизм разводки по сортировочным отсекам.
.Нетрудно заметить, что отказы групп А2 и Р2 определяют
продолжительность внецикловых потерь времени, а отказы групп
Al, Т, PI - технологическую надежность КСА, поскольку обычно
под технологической надежностью рабочей машины понимают ее спо­
собность выпускать годную продукцию в течение заданного времени
till , а для КСА "годная продукция" - работа без ложной классифи­
кации и ложного адресования.
Внецикловые потери входят в выражение (I.I7) как tвп , а
технологическая надежность - как Ртх
, поэтому рассмотрим
далее зависимость Qn от ten и Ртц .
Очевидно, что с уменьшением 1вп величина Qn возрастает.
Причем, чем выше общее качество автомата, тем больше влияет
снижение {.вп на рост Qn
(рис. 1.2, а).
Тем не менее в ряде случаев снижение i вп вступает в проти­
воречие с другими путями увеличения Qn . Это наблюд ется, в
частности, при повышении Qn путем рационального распределения
потребляемой мощности КСА.
'4
Совершенно ясно, что общую мощность .2 Mi , потребляемую
КСА, целесообразно расходовать преимущественно на контроль и сор­
тировку, т.е. увеличивать
M/Jt Mi
(рис. 1.3, а). Величина
Аг+ Мз+ Nt
должна быть как можно меньше и распределяться на
слагаемые таким образом, чтобы большим из
£к
t а , 1цп я
(вп соответствовали меньшие составляющие
* Nt
(рис. 1.3, б). Но в таком случае, большим
t вп . дол17
распределения потребляемой мощности
жны соответствовать малые М , а чем меньше N 4 , тем менее
эффективно снижение i tn (рис. 1.2/5). В этом и состоит отме­
ченное выше противоречие.
При увеличении Ртх величина Qn возрастает так же, как и при
уменьшении tin • Чем выше общее качество КСА, тем влияние увели­
чения Ртх на рост Q„ существеннее (рис. 1.4). Однако никаких
противоречий с другими методами повышения
в данном случае
не возникает. Это, а также то, что пути повышения технологичес­
кой надежности КСА менее изучены, чем пути сокращения ten , за1а
ставляет обратить более пристальное внимание на исследование
на приведенную производительность
В настоящее время для повышения технологической надежнос­
ти КСА используют в основном два направления - повышение аппара­
турной и точностной надежности элементов и резервирование. Но
оба эти направления себя уже исчерпали и возникла необходимость
поиска новых путей повышения Ртх • Некоторые из таких путей,
найденные на основе применения методов информационн й теории
измерений, теории связи, а также интерпретации КСА как разомкну­
той позиционной системы программного управления, и описываются в
книге.
19
Глава 2.
2 I.
ОБЩИЕ ПОЛОЖЕНИЯ, СВЯЗАННЫЕ С ПОВЫШЕНИЕМ
ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ КОНТРОЛЬНО­
СОРТИРОВОЧНОГО АВТОМАТА
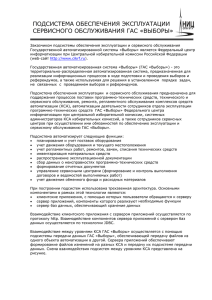
Функциональная схема и некоторые особенности
работы контрольно-сортировочного автомата
'инструкции современных КСА чрезвычайно разнообразны, одна­
ко независимо от этого их устройство и работу можно рассматри­
вать по общей функциональной схеме (рис. 2.Да). Первым блоком
в этой схеме является контрольное устройство КУ, осуществляющее
измерение контролируемого параметра X и фиксирующее принадлеж­
ность объекта контроля тому или иному классу, соответствующему
определенному интервалу
значений X . Контрольное
устройство можно представить состоящим из ИП - измерительного
преобразователя с элементами установки объекта контро..я, и KBj...КВл ~ квантователей выходного сигнала ИП (пороговых элемен­
тов). По номинальной тарировочной характеристике Т’ООн преообразователя ИП, приводимой : при настройке последнего к некото­
рому номинальному началу отсчета Хо , такому, что
= >
квантователи KBj...КВП настраивают на различные номинальные по­
роги срабатывания
где L =1,2,... ,К,К+1,..., П (рис.2.1/5).
Этим обеспечивается физическое воспроизведение нормативных зна­
чений контролируемого параметра X л возможность реализации вы­
ражений (I.I),' (1.2) или (1.3). Если по аналогии с понятием
"измерительная информация", обозначающим информацию о значениях
■змеряемых физических величин, ввести понятие "контрольная ин­
формация", т.е. информация о суждениях, формируемых при контро­
ле [l9], -о можно сказать, что контрольное устройства КУ в КСА
осуществляет своего рода "извлечение" контрольной информации из
объекта контроля. Переработка же контрольной информации с целью
адресования объекта контроля в тот или иной сортировочный отсек
С0П-( происходит далее в СПКИ - в системе переработки,
которую можно рассматривать как совокупность последовательно
соединенных кодирующего преобразователя КП, запоминающего
и
сортировочного устройств ЗУ и СУ. Работа СПКИ синхронизирована
с работой ТМ - транспортирующего механизма, перемещающего объек20
ты из КУ в СУ. Последнее, являясь,по существу,преобразователем
"код-перемещение", и производит адресование объектов контроля,
доставленных ТМ, по отсекам СО<...СОПН.
Рис. 2.1.
Функциональная схема КСА и номинальная характеристи­
ка измерительного преобразователя
При подаче на вход КУ в процессе работы КСА того или иного
значения параметра X на выходе измерительного преобразователя
ИП возникает сигнал У, являющийся, как правило, случайной величи­
ной, распределенной вблизи соответствующего значения У(х)ц и
описываемой некоторой функции плотности вероятности
. Реальные
пороги У1срабатывания квантователей также являются случайными
величинами, распределенными вблизи соответствующих
описы­
ваемых аналогичными функциями -f; . Случайный характер сигнала 7
и порогов срабатывания Ui обусловлен погрешностями измерительно­
го преобразователя и квантователей и предопределяет вид функций
f и
, которые, в свою очечедь, также как и сбои СПКИ,опреде­
ляют технологическую надежность КСА. В связи с этим, прежде чем
21
непосредственно перейти к разработке методов повышения техноло­
гической надежности, рассмотрим указанные погрешности и сбои и
дадим их статистическое описание.
2.2.
Статистическое описание погрешностей и сбоев,
определяющих технологическую надежность
автомата
*
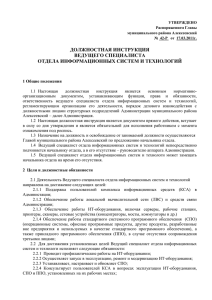
Погрешности
измерительного преобразователя, как известно
[4, 13 ], подразделяются на аддитивную и мультипликативную и мо­
гут рассматриваться как аналогичные погрешности сигнала У . Ад­
дитивная погрешность 4 сигнала !/ , которую можно назвать также
погрешностью У в начале отсчета Хд преобразователя, в общем
случае содержит две составляющие - систематическую Д и случай­
ную Д . Величина Д представляет собой погрешность настройки
начала отсчета и вызывает отклонение всех значений выходного си­
гнала У от номинальной характеристики преобразователя также на
Д . В результате оказывается, что вместо номинальной характе­
ристики
преобразователь имеет реальную смещенную характе­
ристику
Ч>(Х) = Ч’(Х)н+Д
с действительным началом отсчета Хо ,
являющимся решением уравнения ^(Х)Н+Д = О (рис. 2.2р). Величи­
на Д’ представляет собой результат нестабильной работы деталей и
узлов преобразователя в действительном начале отсчета вследствие
непостоянства сил трения, Люфтов и т.п. и численно равна выходно­
му сигналу У измерительного преобразователя при X = Хо . При
атом значении X она имеет определенное рассеивание относительно
нуля, а при X X Хе ~ такое же рассеивание относительно ^(Х).
Таким образом, реальная характеристика измерительного .преобразо.лтеля под влиянием аддитивной погрешности Д не только смещена
относительно номинальной, но и "размыта'" по всей длине, причем
на одну и ту же ширину.
Рассеивание Д' в большинстве случаев может быть охарактери­
зовано дисперсией <5 д' или среднеквадратическим отклонением
и при Х-Хд описано симметричной функцией плотности вероятности
(2.1)
(здесь и далее аргумент функции - первый из членов, стоящих в
22
скобках; математическое ожидание и среднеквадратическое отклоне­
ние -_второй и третий члены). С помощью.этой функции, рассматри­
вая Д
как математическое ожидание аддитивной погрешности Д
сигнала У и основываясь на
известных свойствах математичес­
ких ожиданий и дисперсий случайных величин [40], можно записать
функцию плотности вероятности указанной погрешности как
(2.2)
НМЛ
где бд =
. В соответствии с [31] среднеквадратическое значение
погрешности Д можно представить как
где с(у - энтро­
пийное значение Д , а Ид - энтропийный коэффициент закона рас­
пределения Д . Отсюда следует, что функцию (2.2) плотности ве­
роятности аддитивной погрешности Д можно представить также в ви­
де
(2.3)
В настоящее время конкретное выражение функций /д и коэффи­
циентов Ид для Д , возникающих по наиболее распространенным
причинам, известно [lO, 43]. В частности, установлено, что пог­
решность Д , обусловленная силами внутреннего трения, подчиняет­
и
ся закону нормального распределения и имеет
-А = —-L=
р ул/-
/4..тД1г]
•
(2.4)
погрешность Д , обусловленная силами сухого трения, подчиняется
закону равномерного распределения С Ид-\/3
и
при Де [A-d^A+dy]
£ =№
О
(2>5)
при Ati [A-dy,A+o(y]
погрешность Д ", вызванная зазорами в кинематической цепи измери­
тельного преобразователя, подчиняется дискретному двузначному
закону с[/4=/( Lit в данном случае определено исходя из понятия
энтропии по А.Н.Колмогорову) и
(§[д-(д+<д))+3[д-р'Й]} ■>
(2'6)
П
■ '
.. где О - символ дельта-функции Дирака [12]; погрешность Д
23
, вы­
званная зазором между керном и подпятником в измерительных прео­
бразователях, построенных с применением опор на кернах, а также
вызванная наводками синусоидальных электрического напряжения, под­
чиняется арксинусоидальному закону [31] и имеет Цй=-£=, и
В то время как аддитивная погрешность зависит от настройки
начала отсчета и нестабильности работы деталей и узлов преобразо­
вателя при Х-Хо > мультипликативная погрешность 7
сигнала У,^
называемая также погрешностью чувствительности, является резуль­
татом изменения указанной нестабильности при отклонении X otXq.
Погрешность 7 , аналогично Л , имеет рассеивание относительно
, однако оно не одинаково по длине характеристики, а с уве­
личением IX’Xol возрастает, что в механических преобразователях,
например, обусловлено ростом упругих деформаций и нестабильностью
процессов внутреннего трения, а в электрических - прогрессирующи­
ми внутренними помехами. В связи с этим ' еальная характеристика
У(Х) измерительного преобразователя оказывается дополнительно
"размытой" на величину, являющуюся функцией X
(рис. 2.2,6).
Рис. 2.2. Реальные характеристики ИП при наличии аддитивной
и мультипликативной погрешностей
Рассеивание V , подобно рассеиванию & , можно охрактеризовать дисперсией
или среднеквадратичным отклонением
и описать функцией плотности вероятности
(2.3)
24
которая в подавляющем большинстве случаев, также как и функция
j-д f симметрична, ос ли, как и в случае погрешности 4 , исполь-'
зовать энтропийный коэффициент Uу закона распределения погреш­
ности 7 , то через
и U? можно выразить энтропийное зна­
чение V как
[31]. Отношение этой величины к |ф(Х)|
представляет'собой j3y - энтропийное значение относительной му­
льтипликативной погрешности сигнала У . У большинства преобра­
зователей, применяемых в контрольных устройствах КСА, Jiy прак­
тически не изменяется по всему диапазону преобразования X -Это
дает возможность полагатьи функцию (2.8) представить
также в виде
?
=
!2.9>
Обычно в случаях, когда мультипликативная погрешность V с гнала У измерительного преобразователя обусловлена его внутренни­
ми электромагнитными помехами или силами внутреннего трения в уп­
ругих элементах,
=
и (2.9) имеет конкретное выражение
____ L____ ехп/__ЕЦ,
(2.Ю)
соответствующее закону нормального распределения. Погрешность
V бывает также распределена и по равномерному закону с Цч=}/з
и
-
при
о
при
е
Рассмотрим далее погрешности квантователей. Погрешности
квантователей Л I
'онтрольного устройства КСА во многом ана­
логичны погрешностям измерительного преобразователя и также
могут быть подразделены на систематические и "случайные [3].
Первые из них ( Л i ) представляют собой погрешности настрой­
ки порога срабатывания ус
всякого i -го квантователя.
В связи с их существованием вместо порога срабатывания
называемого номинальным,
С - й квантователь имеет реально на­
строенный порог
Ч (xi) ’ У (хс)ц ★ Л 4 .
Вторые погреш­
ности ( A I ) являются отклонениями порога срабатывания ус
от ( У(хс) ) под
влиянием ■ нестабильности
физических
25
процессов в квантователе. Если эти отклонения охарактеризовать
ди< лерсией
иль их среднеквадратическим значением
, то пог­
решности L -го квантователя Ai можно рассматривать как распреде­
ленные в соответствии с плотностновероятности
,гл2!
Величинами определяет абсолютное энтропийное зна­
где
чение порога чувствительности Ei квантователя, с помощью которого
ее можно выразить, подобно Мд , как <^AisEi/uAi ’ где UAi - эн­
тропийный коэффициент распределения A'l • Это позволяет предста­
вить (2.12) и как
12лз>
Функции
, как правило, симметричны и для большинства электри­
чески; , электромеханических, пневматических и тому подобных кван­
тователей имеют вид
£
_
/
рул/ (Ai-Ai) ]_
тд\
дуп/
Mi I (2-H)
У ряда типов контрольных устройств КСА, например построенных на
датчиках типа БВ-6048 [29], ДОМ [4?] и др., величина £i не зависит
от ?(Xi). Оо многих же случаях [з] она связана с '/’(Xi) соотношением
ЕгЩЩХ,.)! , где El - относительное энтропий! ое значение поро­
га чувствительности i -го квантователя, не зависящее от^(Х;). В по­
добных случаяхимеют несколько иной вид, но также являются сим­
метричными, чаще всего такими как
£ -
№
пуп/ (Ai-A'^e}-
\/ё
РУГ1( (Ai-Aifve}
тц.
Рассмотренные погрешности измерительного преобразователя и
квантователей, .как уже от ечалось ранее, предопределяет вид фун­
кций £ и
плотности вероятности выходного сигнала У измерите­
льного преобразователя и порогов срабатывания Ус квантователей.
Зная
и/л1 ’ ФУнгсЧии / и /с найти нетрудно. Для порогов
26
срабатывания УI их можно сразу же записать как
что является естественным следствием свойств математических ожи­
даний и дисперсий. Что касается сигнала У , то для определения его
функции плотности вероятности £ нужно вначале отыскать функцию пло­
тности вероятности суммарной погрешности этого сигнала.
Обозначим указанную погрешность Cl) и в силу статистической не­
зависимости аддитивной погрешности Д и мультипликативной погрешнос­
ти V будем полагать 60=4+7• Тогда, согласно [40], плотность вероят­
ности fa погрешности Ь) можно вычислить как композицию
и fy(x)
ЙС?
’'
-оо
<2Д”
Если параметры функции (2.17) выразить ,в соответствии со свойства­
ми математических ожиданий и дисперсий, то в обобщенном виде ее мож­
но записать как
I 2 ~
2
~
т
(2.18)
что позволяет в соответствии с этими же свойствами представить
плотность вероятности j- сигнала У как
/=?(ад»)Л,4мНу.(гЛ9)
Конкретные выражения £ и соответствующие им энтропийные коэф­
фициенты L(y(xJ могут быть разными, однако независимо от этого обоб­
щенное выражение (2.19) совместно с (2.16) дает bosmi :ность сформу­
лировать количественно понятие технологической надежности контро­
льного устройства КСА и определить ее показатели. Аналогично стати­
стическое описание сбоев в системе переработки контрольной информа­
ции позволяет формализовать понятие технологической надежности и
определить ее показатели для СПКИ.
Как уже отмечалось, СПКИ содержит последовательно соединенные
27
кодирующий преобразователь, запоминающее и сортировочное устройст­
ва. 1.зрвый по сигналам контрольного устройства КСА формирует кодо­
вые комбинации, соответствующие тем или иным интервалам сортировки,
второе запоминает эти комбинации на время передвижения проконтроли­
рованного объекта в автомате от контрольного устройства к сортиро­
вочным отсекам, а третье, будучи установлено в позиции сортировки,
отрабатывает кодовые комбинации, приходя под воздействием каждого
из них ” определенное состояние, обеспечивающее адресование пода­
ваемого на него объекта, в тот или иной отсек.
Кодирование в СПКИ производится параллельным равномерным кодом,
всем разрядам которого соответствуют также параллельные и обычно
одинаковые линии связи, содержащие по одному одноразрядному элемен­
ту каждого из вышеперечисленных блоков. Учитывая это, при рассмотре­
нии сбоев в СПКИ, относящихся к категории аппаратурных отказов,
достаточно дать описание вероятности безотказной работы одной ли­
нии связи. Поскольку указанная вероятность является функцией уров­
ня сигнь .а, передаваемого по линии, а уровень сигнала определяет­
ся соответствующим ему кодовым символом $ , то в общем случае веро­
ятность безотказной работы линии связи в течение рабочего цикла
КСА можно обозначить как Р($) . При установившейся работе автомата
после окончания периода приработки и до начала периода ианосаР($),
как правило, подчиняется экспоненциальному закону [б]:
P(S)x ехр(-Я$Т),
(2.20)
гдеЛ<; = const- интенсивность сбоев при переработке символа S
.
Полагая, что сбои кодирующего преобразователя, запоминающего и сор­
тировочного устройств независимы, Д$Тр нетрудно выразить через
интенсивности сбоев одноразрядных элементов этих устройств:
Л$Тр- Лк.иТк +3.з1$'Тз+Лс,РТс,
(2.21)
где ТкрзрГс. - времена работы соответственно кодирующего преобразо­
вателя, запоминающего и сортировочного устройств в течение рабочеio цикла. Вводя д'’лее коэффициенты загрузки перечисленных устройств
в течение цикла Кк= 5
* ; К3=
J
; P(S)
можно представить
_.ак
‘Р
1р
Тр
Р($)аехр1р-Тр(АК'$Кк+/1з,$Кз+/1с,$Кс)] ,
(2.22)
Если учесть, что при рациональной организации рабочего цикла КСА
28
K$ = Kcs1 , то г(S) можно выразить и как
Р(5)= €хр [-Тр(ЛмКх + Лз,6 + ^сл)]-
(2.23)
Последнего выражения вполне достаточно для статистического описа­
ния сбоев, относящихся к категории аппаратурных отказов СЛНИ. Что
касается сбоев СПКИ, относящихся к режимным отказам, то их описать
можно еще проще. Для этого следует использовать определяемую в каж­
дом конкретном случае вероятность P(t>Tp), где t - время, затрачива­
емое на переход сортировочного устройства из некоторого предыдуще­
го состояния в требуемое и на движение проконтролированного изде­
лия через это устройство к сортировочному отсеку.
2.3.
Показатели технологической надежности контрольного
устройства автомата
Положим в основу понятия технологической надежности контроль­
ного устройства представление о точностных отказах, обусловленных
функциями / и
и выражающихся в ложной классификации объектов
контроля [2?]. Поскольку о принадлежности объектов контроля неко торому К-му классу судят по попаданию сигнала У в интервал [ Уд = Ук,У(=Укн], то всякий факт ложной классификации, по существу,
есть выполнение условия
Xе [Х/(,Хм]=^
[ Ук,Укн] ,
(2.24)
точно так'же, как всякий факт правильной классификации есть выпол­
нение условия
Хе[Хк,Х к+< ]=>у<^[ук,ук+1].
(2.25)
Вероятности выполнения условий (2.2 ) и (2.25) для любых Хе[Хк,ХкНд,
обозначим их соответственно Р(У<УкУУ>Ук^) и Р(Ук<У<Уы), при
каждом К зависят от функции плотности вероятности /fy) контрлируемого параметра X , от возможных неисправностей контрольного устройс­
тва, от временных изменений функций плотности вероятности Р(к), f
и
и от отношения длительности Ti переходных процессов в контроль­
ном устройстве при данном цикле его работы к временному интервалу^
29
между моментом подачи параметра X на вход устройства и моментом
съема сигналов с выходов устройства. Если,учитывая это, рассматри­
вать работу контрольного устройства на временном отрезке, в преде­
лах которого вероятность неисправностей пренебрежимо мала, а фун­
кции pM,f- и/д стационарны в узком смысле, то в случае, когда
вероятности
Р(Ук<У<Уш) и Р(У<Ук\ХУ>Ук^<) в каждом цикле кон­
троля будут постоянны. Способность контрольного устройства к точ­
ностным отказам типа ложной классификации либо к отсутствию тако­
вых при постоянстве Р(У<УкУУ>Укн) и Р(Ук<У<Уш) и будем назы­
вать его технологической надежностью .
Очевидно, что величины Р(У<УкУУ>Укч)и Р(Ук<У<Уш) или
выражения, содержащие их, могут служить показателями технологичес­
кой надежности контрольного устройства. Для определения этих показа­
телей введем упрощенное обозначение £=(}(У, Ч(Х))
и предположим
вначале, что X принимает некоторое конкретное значение из интерва­
ла [ Хк, л'кч]
с вероятностью, равной I. Тогда, очевидно, вероят­
ность попадания сигнала У в пределы интервала [Ук,Укч] ^удет рав­
на
Уш
Рх(Ук<У<Ум) * l<l(y,<?(x))dy.
(2.26)
Ух
Аналогично вероятность непопадания сигнала У в пределы интер­
вала [Ук,Рш1 будет равна
’Ум
Р,(У<УкУУ>Ум)-^-^(УУ(х))й1У.
(2.27)
Ук
Если далее принять во внимание действительную элементарную ве­
роятность p(X)dX данного Xе [Хк,Хш] , то в соответствии с теоремой
о вероятностях независимых совместимых событий [40] получим вероят­
ности выполнения условий (2.2&) и(2.24) для данного X равные соответ­
ственно р(х'Рх(Ук<У<Ум)а1х н р(Х)Рх(У<Ук\/У>Уш)У.Х.
Применяя затем теорему о вероятностях независимых несовместимых со­
бытий [40], будем иметь
„
Хм
Уш
Р( Ук<У< Уш) ~Jp(x)Px(Ук< y<yM)dx=!p(x)dxfyy, 4>(x))dy; (2.28)
*
x
yK
n
x.Kt<
Уш
vy>y^)=jp(x)Px(y<yKvy>yM)dx^p(x)P-[Q(y!4>(x))dy)dj (2.29)
Xk
Xk
30
Выражения (2.28) и (2.29) связаны между собой.зависимостью
Р(Ук<У<У^)’Рх-Р(У<У>суУ>У^),
•
(2-30)
где Рк - вероятность попадания параметра X в пределы интервала
[Хк,Хк+<] . В связи с этим для оценки технологической надеж­
ности контрольного устройства достаточно использовать не оба эти
показателя,а один из них,например (2.28) - вероятность правильной
классификации.
В случае, когда функциимонотонны, каждой из них соответ­
ствует однозначная обратная функция У1~¥(р). Это дает возможность
для монотонных /.представить (2.2d) в обобщенном виде
Р(Ук<У<У^)=/р(^х/^(У,т)а/У.
(2.31)
Хк
¥(Ук)
Однако уже отмечалось, что функции
в подавляющем большинстве
случаев являются не монотонными, а симметричными. Для таких fi об­
ратные функции неоднозначны, что не позволяет получить выражение,
подобное (2.31). Но значения функций У{ , обратных симметричным
функциям fi , как следует из изложенного ранее, могут быть огра­
ничены пределами эффективного интервала неопределенности p?(Xi)H+Aj~
, а это для случаев симметричного распределения
tJl позволяет дать следующую нижнюю оценку
Р‘(Ук<У<Ук^1) ■'
'
Хки
^(Хк^н+Лк-н- Ек-н
*
X
(Хк)и +Лк + Е к
Такая оценка при обосновании и разработке способов повышения
надежности контрольных устройств равноценна зависимости (2.31)
и также может быть практически полезной. С ее помощью можно полу­
чить и другой полезный показатель технологической надежности нижнюю оценку вероятие ?ти правильной классификации объектов конт­
роля с любыми X , принадлежащими полному диапазону [X, Х“]
изменения X • Для этого достаг.. т<о на основании теоремы о веро­
ятностях независимых и несовместимых событий просуммировать (2.32)
по всем К . Полученное выражение
лд Хг+/
+Аки ~Е К*1
,
’FO(x/+Ak + Е.<
зт.
(2-33)
где П - число граничных значений всех классификационных интер­
валов X , дает более полное представление о технологической на­
дежности контрольного устройства, чем (2.32). При необходимости
оно также позволяет найти верхнюю оценку вероятности ложной клас­
сификации объектов контроля с X , принадлежащими
, как
= / "Л .
2.4.
.
(2.34)
Показатели технологической надежности системы
переработки контрольной информации
Подобно тому, как при определении надежности КУ было испольэо-_
вано представление о ложной классификации объектов контроля, при
отыскании показателей надежности СПКИ воспользуемся понятием
ложного адресования [23].
Как уже отмечалось, ложное адресование проконтролированных из­
делий по вине СПКИ происходит при сбоях, относящихся к категории ап­
паратурных отказов, и в случаях, когда время, требуемое на приведе­
ние сортировочного устройства в состояние готовности к приему изде­
лия и на движение изделия в устройстве в процессе адресования, пре­
вышает длительность рабочего цикла автомата. В связи с этим примем
в качестве показателей технологической надежности СПКИ вероятности
этих событий $ и $ , соответственно.
Определим величины /Г 'и /) .
Пусть система переработки контрольной информации предназначе­
на для автомата с /V сортировочными отсеками, для кодирования ин­
тервалов контролируемого параметра используются кодовые комбинации
Г из алфавита A-{OJ,
, где ГП - основание кода, и кажД1 1 комбинация содержит
~ символов S ё А . Пусть также для ка­
ждого X вероятность безотказной работы любой линии связи, входя­
щей в систему, в течение одного цикла работы автомата составляет
P(S), определяемое в соответствии с (2.20). Тогда вероятность
отказа системы при переработке кодовой комбинации /“ :
- ПР^(ё).
S
32
(2.35)
Поскольку параметр X , контролируемый автоматом, является случай­
ной величиной, подчиняющейся закону распределения р(Х) , перера­
ботка всякой кодовой комбинации Г является случайным событием с
некоторой вероятностью Р(Г). Если полагать, что все кодовые ком­
бинации образуют N - множество R , диапазон возможных значений X
проквантован на интервалы [Хк,Хкн], где КсК
Л/\
и операция кодирования интервалов представляет собой взаимно-одно­
значное отображение R на К
то, пренебрегая погрешностями контрольного устройства, можно по­
лагать, что
Хк :
У{г,к]е Rq‘K=^ P(rhP(K)
*
fp(x)dx.
(2.36)
Хк
Отсюда следует, "то при известных р(Х)и§'
можно считать
известным и
Р(Г) ,
и окончательно вероятность отказа систе­
мы переработки контрольной информации по вине комбинации Г опре­
делится как
Но тогда в силу несовместимости и независимости процессов пе­
реработки различных кодовых комбинаций
/-ЕРМЛР^от.
<2-за> .
Вероятность О в отличие от о связана не с аппаратурными
отказами, а с высокой производительностью КСА. Известно, что при
рациональной организации цикла работы автомата его производитель­
ность определяется производительностью сортировочного устройства.
Последняя характеризуется временем, необходимым для направления
той или иной детали в соответствующий сортировочный отсек:
Z-b't.,
<2.39)
где if- время, затрачиваемое на переход устройства из некоторого
33
предыдущего состояния в требуемое (состояние готовности к приему
проконтролированного изделия);
- время движения изделия через
устройство к отсеку.
Всякое состояние готовности сортировочного устройства зави­
сит от кодовой комбинации Г , поданной на него, а множество Т
значений кг связано с R взаимно-однозначным отображением Тна R
"/ к!
кг
9=1
. ’
)
»
(2.40)
обусловленным конструкцией устройства. В связи с этим движение
изделия через сортировочное устройство в течение времени
аналогично переработке Г, можно рассматривать как случайное собы­
тие, Вероятность которого равна Р(кг), и при этом считать, что
V { 1г,г] 6 Tg'R => Р(кг) = Р(Г).
С учетом (2.36) и при
(2.41)
это означает, что
(2-42)
, законом распределения контро­
т.е. Р(кг) вполне определяется
лируемого параметра X
и квантованием последнего на интервалы.
Приведение сортировочного механизма в готогчость в течение
времени к< является случайным событием с вероятностью Р(kt) , по­
добной' Р(кг) . Рассуждая строго, P(ii) следует считать случайной
функцией закона распределения пар деталей, смежных во времени сор­
тировки и подлежащих адресованию" в различные сортировочные отсеки.
Однако если принять во внимание, что при большом числе отсеков и
при непрерывно и часто пополняемом згрузочном устройстве автомата
вероятности появления каждой из указанных пар весьма малы и отлича­
ются друг от друга незначительно, то правомерно считать, что Р(к<)
подчиняется-закону распределения времени перехода сортировочного
устройства из одного состояния в другое и не зависит от статисти­
ческих характеристик параметра X . В этом случае Р(к/)можно найти
расчетом или экспериментально, замеряя время ki во всех возможных
вариантах (при переходе из каждого возможного состояния во все
другие состояния).
34
Зная P(it)u P(tz), далее несложно отыскать закон распределения
t как композицию распределений t< и tz
P(t)--EP(tt)P(t^t-tz).
(2-43)
tz
Если при этом известна длительность цикла работы автомата, то
очевидно
•
f-P(t>Tp)’ZP(t).
(2.«>
i>Tp
По известным &
и
5
нетрудно найти и интегральный показа­
тель технологической надежности СПКИ. Основываясь на независимости и
совместимости событий, описываемых вероятностями $ и $ , достаточно
подставить значения последних в выражение
ЬЛ+Ь'-М,
<2-45)
что после преобразования дгет
<г-46>
г
$
i<Tptz
Выражения (2.38), (2.44) и (2.46), как уже отмечалось, полу­
чены без учета погрешностей контрольного устройства КСА, а поэтому
они несколько не объективны. Тем не менее, они вполне практически
приемлемы, особенно если Pfr} и P(t<) принимать численно равным не
/к-и
Jp(x)dx
Хк
, а Р'(У,с<У< Укч).
В этом случае (2.38), (2.44) и (2.46) приобретают смысл верх­
них предельных оценок вероятностей ложного адресования изделий
и могут быть использованы наряду с (2.32), (2,33) и(2.34).
С помощью показателей, рассмотренных в настоящем и предыдущем
параграфах, можно решать широкий круг задач, связанных с повышени­
ем технологической надежности кс трольного устройства автомата и
35
системы переработки контрольной информации. Сюда могут быть отне­
сены уже ставшие традиционными задачи, направленные на уменьшение
dy и fin • на уменьшение £i или Еi, Лк,$ ,
и Я c,s,
и тому подобные. Вместе с тем к указанному кругу могут быть отне­
сены и нетрадиционные задачи, решения которых дают возможность по­
вышать надежность без уменьшения перечисленных величин. Не останав­
ливаясь на задачах'первого вида, достаточно подробно описанных
в литературе, рассмотрим ниже ряд задач второго вида.
К ним относятся, прежде всего, задачи оптимизации характе­
ристик измерительного преобразователя контрольного устройства
автомата и задачи оптимизации настройки элементов контрольного
устройства. Кроме того, в их число входят задачи управления за­
коном распределения вероятностей параметра, контролируемого авто­
матом^ задачи рационального кодирования контрольной информации.
Дополнением к этому является описание теоретических предпосылок
построения и схем систем автоматической поднастройки и адаптации
автоматов.
36
Глава 3.
3.1.
ПОВЫШЕНИЕ ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ
КОНТРОЛЬНОГО УСТРОЙСТВА АВТОМАТА ПУТЕМ
ОПТИМИЗАЦИИ НОМИНАЛЬНОЙ ХАРАКТЕРИСТИКИ •
ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ
Формулировка и обобщенное решение задачи
Если проанализировать показатели надежности контрольного
устройства, введенные в предыдущей главе, то нетрудно заметить,
что при постоянных законах распределения Д и 7 и при некоторых
фиксированных диапазонах изменения X и У(Х)н> т.е. при одних и
тех же cly я fiy . U.& и И? , X' и X" , (/’(’Х}ии Ч(Х“)н , числовые
значения показателей могут быть различными в зависимости от вида
номинальной характеристики Р(Х)и измерительного преобразователя,
входящего в контрольное устройство. В соответствии с этим право­
мерно поставить задачу отыскания и последующей реализации такой
оптимальной
, которая при неизменных значениях перечислен­
ных выше величин обеспечила бы максимум А [13,24].
Для математической формулировки указанной_задачи воспользуем­
ся показателем Р(Ук<У<Уки). Если полагать, что Д , Ai и Ei не влия­
ют на форму оптимальной характеристики Ч
*(Х)и
, то этот показатель
примет вид
Р'(Ук<У< Ук«) * j p(x)dxfy(y, 4>(X)H)dy.
(3.1)
Хк
Ч(Хк)н
Представим функцию ^(У.ЧЦХ)") , входящую в (3.1), как
»)=шта),
(3.2)
где
нормирующий множитель, равный значению функции
при JAVWh ; 1~(Х)~ коэффициент, не зависящий от 6у(Х) . Поскольку
Г(Х), очевидно, зависит от формы функции ^У,Ч(Х)И), а энтропийный
коэффициент Uy(X) последней также зависит от этого, выразим Г(Х)
через Uy(X) . Это нетрудно осуществить, если проинтегрировать.
(3.2)
Образ»»:
(3.3)
Ч(Х)н- Иу(х)бу(Х)
37
где R - некоторое число, а затем, используя первую теорему интег­
рального исчисления о среднем значении [44], применимую i для любых
интегрируемых функций, представить (d.3) как
(йг^(Х)н)иУ(Х)бу(Х) ~R ■
(3.4)
Из (3.4) непосредственно следует
2Ч(У,Ч>(Х)и)иу(Х) ~ Uy(X) '
-
что после подстановки в (3.2) и в (3.1) дает
Хм
*№кн)и
13-61
(р(Хк)н
Хк
Если, основываясь на интегрируемости и знакопостоянстве функций
Р(Х)и Ц(У,Ф(Х)н) • применить к (3.6) первую и обобщенную [44] тео­
ремы интегрального исчисления о среднем, будем иметь
Ф(Хкм)н
Хм
Р\Ук<У<Ум)--$(х)^(У,^(х}^У^11Ш^(1х■
*)н
Ч(Х
Хк .
. S(x)4(H,<fWx.nh -
Х„н
о.?)
. .
Хк
Вводя далее выражение
у(х)=
.
.
(3.8)
dx
где^(х)- чувствительность измерительного преобразователя, умно­
жив и разделив (3.7) на Хм~Хк и использовав теорему Лагранжа
[44], получим
Хм
<3.9)
■
или
Хк
после обратного применения обобщенной теоремы о среднем
dx.
Хк
38
(3.10)
:
Как видно из (3.10), вообще для увеличения Р(Ук<У< Ук-н)
целесообразно увеличивать входящий в это выражение интеграл и сто­
ящие перед ним множители. Однако возрастания Р(Ук<У^Ук+<) можно
достичь и путем увеличения одного лишь интеграла, если, по край­
ней мере,
ЗЖУ^ЫХкч-Хк)-const.
Анализ S(X)Q (У,У(Х)н)
и их взаимосвязи с ^*(Х)
бу(Х) показывает, что (З.П) имеет место, когда
*<
Хк
(З.П)
,
Цу(Х)
и
(3.12)
Const.
J Uy(X)<3y(X)
Xк
Последнее же справедливо тогда, кс да dy и j}y , Ц7 и Uа , Хк
и X к+1 , Ф(Хк)н к ^(Хки)н постоянны. Отсюда-вытекает, что для
обеспечения максимума Р
*(Ук<У <Ук
*1)
при постоянных dy и Jiy , Ил и Uj,
Хк и Хх+/ , У(Хк)н и ^(Хк^н следует обеспечить максимум
Хки
(3.13)
~ Uy(XJ&y(X)
Хк
при ограничении (3.12).
Если обратиться теперь к показателю Рг , являющемуся, как
указывалось ранее, суммой Р(Ук<У<Уки) по всем К , то на основании изложенного можно считать, что для обеспечения максимума Pi
при постоянных dy И j$y,U& И Uy J'uX\V(X4huW(X“)h следует обесиечить максимум
п-<
X"
I/. ri/ _ [ РМХ(Х) rfv
(3.14)
.£/к~зич№бу(х)ах ’
при ограничении
\ иуШбу(Х)
(3.15)
функция р(Х), входящая в (3.14), как известно, подчиняется уело-
вию нормировки
J p(x)dx = /.
Г
(3.16)
Совместно с (3.15) это влечет за собой
х‘
Г
^')Л^,мЖ)Л'ип5г
X'
х
<зл”
В связи с этим окончательно задачу оптимизации Ф(Х)и при постоянных
законах распределения Л и V и некотор» фиксированных диапазонах
изменения % и У>(Х)н можно сформулировать как задачу отыскания
Ф(х)н, обеспечивающей максимум (3.14) при ограничении (3.17).
Найдем условие указанного максимума. Для этого заменим выра­
жение (3.17) эквивалентным ему выражением
*
X
*
X
(зла)
X
и обозначим
X
(зи>
Представим далее (3.14) и (3.1а) с учетом (3.19) как
X’
V= jexpffXjt/x ,
*
X
(3.20)
X' .
fe(X)dx = OC0n$tt
(3.21)
X'
и, рассматривая (3.20) как функционал,
применим один из наи­
более простых методов отыскания экстремумов, используемых в вариционном исчислении, - метод Эйлера [7,а].
В соответствии с этим методом составим вспомогательный фун­
кционал
Xм
X’
J=[(expZ(x)-aZ(x))dx = jv
dx,
*
(З.22)
X'
х1
где d - произвольная постоянная. Затем, используя (3.22), запи­
шем уравнение Эйлера, которое в данном случае имеет вид
40
Ип (3.23) следует
tn Cl 3 Z(X)sCOn$t f
(3.24)
что, согласно (3.21), влечет за собой
С
(3.25)
Х'-Х' ’
Подставив (3.25) в (3.19), получим
UyWtfylX) ' Х^Г ’
>
(3.26)
или после потенцирования
____ У (Х) _ J руп С
Uy(X)<y(X)~ р(х) и хчг
(3.27)
.ио соотношение представляет собой условие, при котором V дости­
гает экстремума, и показывает, что последний имеет место при обрат­
ной пропорциональной зависимости между ^(X)/Uy(X)6y(X)up(x). Однако
из анализа физического смысла (3.27) следует, что 0кстрем”м, кото­
рому соответствует данное соотношение, является не максимумом, аминимумом. Тем не менее, зная условие минимума, нетрудно отыскать
и условие максимума V при ограничении (3.18). Действительно, если
минимуму в рассматриваемом случае, как видно из (3.25), соответст­
вует ?(Х) постоянное во всем диапазоне изменения X , т.е. равномер­
ное распределение С , то максимуму соответствует Z (X) , наиболее от­
личающееся от постоянного, т.е. наиболее неравномерное распределе­
ние С. Но поскольку равномерное распределение С обеспечивается
при условии обратной пропорциональности (3.27) между )f(X)IUy(X)^y(x)'
и р(Х) , то, очевидно, наиболее неравномерное распределение обес­
печивается при условии прямой пропорциональности
uy(x)dy(x) = ^P(x)>
;де f
i(3-28)
- коэффициент пропорциональности. Таким образом, соотноше­
ние (3.28) и есть условие, при котором V имеет максимум. Оно же
является и обобщенным решением задачи отыскания оптимальной Ф(Х)н,
обеспечивающей наибольшую надежность контрольного устройства при
постоянных законах распределения 4 и V и фиксированных диапазоn;ix[X',X"lw [
, Ф(Х")и]
изменениях и Ф(Х)«.
41
Найдем из полученного обобщенного решения частные решения,
представляющие собой уравнения оптимальных Ф(Х)н при наиболее рас­
пространенных законах распределения Д и V , рассмотренных в гл.2.
3.2.
Произвольное распределение аддитивной погрешности
при отсутствии мультипликативной погрешности
Как следует из (2.19), в случае, когда мультипликативная пог­
решность fig '■ выходного сигнала измерительного преобразователя рав­
на нулю,
(3.29)
.
При этом, очевидно,
отношение
Иу(Х)-Ий
и (3.28) превращается в со­
■^ = [р(Х)
лу
(3.30)
’
справедли всё при любых законах распределения Л.
Если’заменить
в (3.30) согласно (3.8), то будем иметь
выражение
d4>{X)n =dy£p(x)dx ,
(3.31)
интегрируя которое можно получить уравнение
, оптимальной
при произвольном распределении А и отсутствии 7 . Проведем ни­
же указанное интегрирование, однако предварительно определим значе­
ние входящего в (3.31) коэффициента пропорциональности £ .
Для определения коэффициента [ ложно применить два метода,
основанных на использовании понятия разрешающей способности изме­
рительного преобразователя и понятия чувствительности в начале
отсчета. Воспользуемся вначале первым понятием, базирующимся на
представлении о достоверно различимых ступенях входного сигнала X
измерительного преобразователя.
Согласно [31, 43] , достоверно различимыми ступенями X явля­
ются неперекрывающиеся интервалы X , вписывающиеся в полосу "раз­
мытости" ха; теристики преобразователя, образованную в общем слу­
42
чае аддитивной и мультипликативной погрешностями. Указанные сту­
пени сплошными линиями изображены на рис. 3.1. Как видно из рисун­
ка, достоверно различимым ступеням X соответствуют определенные
(показанные штриховыми линиями) ступени сигнала У . Количество
тех и других ступеней в диапазонах,[Х',Х
]
*
и |Ф(Х‘)н,Ф(Х'%] одинако­
во и равно некоторому числу В . Это число и представляет собой
разрешающую способность измерительного преобразователя [3l] .
Если обратиться к соотношению (3.28), то нетрудно заметить,
что величина Uy(X)6у (X) , входящая в него,по существу, представ­
ляет собой энтропийное значение погрешности сигнала У . Текущая
энтропийная ширина ступени У в связи с этим равна 2Uy(X)dy(x), а
число таких ступеней в интервале №(.Х)н равно d(P(X)n;?Uy(X)dy(X).
Это позволяет выразить разрешающую способноеъ в виде
WA л
М
П-J.
2 JUy(X)dy(X) ■
(3.32)
Рис. 3.1. Достоверно различимые ступени входного сигнала ИП
Вместе с тем, расписав (3.28) с учетом 13.8) как
(Ши = tp(x)dx
Uy(X)dy(X)
43
(3.33)
и проинтегрировав полученное выражение следующим образом:
>
Г
zffnMrfx
(3.34)
Jmdytx) r
V(X')n
X‘
на основании (3.16) можно прийти к
fa f. «УМ
*
(3.35)
Сравнение (3,35) и (3.32) непосредственно дает
21).
*
1
(3.36)
Определить t через чувствительность измерительного преобразовате­
ля в ^начале/ отсчета можно еще более просто, чём через разрешаю­
щую способность.
_
Если полагать, как вто делалось в начале 3.1, что Д на фор­
му оптимальной V(X)h
не влияет, то в силу
(3.37)
при любых законах распределения Д и V можно принимать
(3.38)
Uy(Xo)<$y(Xo) = oly .
Подставляя значение начала отсчета Хо в (3.28) и учитывая (3.38),
получим
■
(3.39)
откуда
f=7-Wj
dy р(Хо}
Заменим далее I
-
(3.40)
в (3.31) его значениями согласно (3.36)
й(3.40):
0Ш)и = 2Ddyp(X)dX,
44
(3.41)
М(Х)н =
(3.42)
Если теперь выполнить интегрирование, о котором упоминалось
выше, в пределах, соответствующих (3.37), то из (3.41) и (3.42)
получим
У(Х)и
X
fd<f(X)n = 2DdyJp(x)dx
(3.43)
D
Хо
1р(Х)н
X
и
(3.44)
.
В связи с тем, что левые части полученных выражений равны Ф(Х)и
окончательно имеем
X
4>(х)н = 2Ddyjp(X)dX
’
(3.45)
h
и
X
(3.46)
?Х°Х<>
Выражения (3.45) и (3.46) являются уравнениями оптимальной номинальной характеристики измерительного преобразователя при произ­
вольном распределении Д и отсутствии V .
3
.3.
Нормальное распределение аддитивной и'мультиплика­
тивной погрешностей Д и V
Для отыскания оптимальной
при нормальном распределении
аддитивной и мультипликативной погрешностей воспользуемся выраже­
нием (3.33). Подставим в него вначале значение (ц(Х) из (2.19),
полагая также,как и раньше, что Д на форму оптимальной У (Х)н не вли-l
яет:
dWx)»
45
= tp(x)dx.
(3.47)
Если учесть, что при нормальном распределении погрешностей Л и V
суммарная погрешность сигнала У также распределена нормально,
то, очевидно, в (3.47)
UA=Uv = UyM.
(3.48)
В соответствии с этим из (3.47) следует
ХП~1]'Нг
’ = WMX.
(3.49)
Поскольку при расчете и реализации оптимальной характеристики ^(Х)н
целесообразно наибольшему значению р(х) равному р (Мох)) , где Мох
- мода X , поставить в соответствие наименьшее £зу(Х) , jравное <ц(Хо),
т.е. принять в качестве Хо Х = Мох , то согласно (3.37),, далее
можно записать
М)и
X
(3.50)
или с учетом изложенного и соотношения (3.40)
V(X)h
X
f
№
_ У(Хо) \P(x)dx,
(3.51)
■ Выполнив интегрирование, будем иметь
X
г---------- г.
(3.52)
или
(3.53)
Мох
что после потенцирования дает
------------- X
(3.54)
Мох
16
Решая (3.54) относительно Ф(Х)н, получим выражение
X
X
или, принимая во внимание, что
■" ~~~
= SA? ,
(3.56)
- выражение
<3-5Я
Это и есть уравнение оптимальной т(/)и при нормальном распределе­
нии А и V ■
В случае, когда известно ^(Х<.' , оно может быть использовано
непосредственно, если же вместо у(Хо)известно В , то его можно ис­
пользовать и в виде
X
Ш^^А^И^МУх),
?
Ми
f
<3.58)
что является результатом замены значения L , соответствующего
(3.40), значением)? соответствующим (3.36).
3.4.
Равномерное распределение аддитивной и
мультипликативной погрешностей 4 и?
При равномерном распределении аддитивной и мультипликативной
погрешностей сигнала У измерительного преобразователя найти уравне­
ние оптимальной характеристики Ф(Х)Нможно так же, как и в предыдущем
случае, с помощью выражения (3.33). Как было показано П.В.Новицким
[31], энтропийное значение погрешности, являющейся суммой двух неза­
висимых равномерно распределенных составляющих, может быть предста­
влено равенствами, которые в наших обозначениях и применительно к
нашей задаче имеют вид
, еми(зл9)
47
и
. если /ад>^ .
(3.60)
Исходя из этого, выражение (3.33) в данном случае правомерно
записать как
^expp,^^jc/4>(x)n<«fp(x)dx> ecwjipfx)^^ .
(3.61)
и
(З.вг>
/дай
Для отыскания уравнения оптимальной Щх)»
при |Ф(Х)и|< &
проинтегрируем (3.61), выбирая пределы интегрирования и значение
I аналогично предыдущему случаю:
ЧМн
X
cijfj
0
П
2dy
olyp(Moit)J^''
Мох
/
(3.63)
Тогда, выполнив вычисления, будем иметь
X
(3.64)
где знаг
перед левой.частью соответствует Ш >0
п . п ~ Ч(Х)н<0 . Решение (3.64)
, а знак
X
(3.65)
X > Мох
, а нижние Х<Мох
где верхние знаки соответствуют
и будет являться уравнением оптимальной V’fX'w для участков
WtxjwH
Найдем далее подобное уравнение для участков
.
Предположим, что точкам оптимальной характеристики ^(Xjn-t-j^
соответствуют
X -Х^г
. Тогда, используя (3.61) и (3.62),
вывод уравнения оптимальной ^(Х)» проще всего построить на том,
что
dy
~ fiy
X<,z
~jexpl-^^)d^'x)H * -rnT^ip^dx
(3.66)
aly ~ П
2ay I
‘
ciyp(Mo»)jr' '
u
Max
46
и
х
± _1__ ехрЧ1~9Тишп)^х^*dypiMwjJr
J ым\
'
(3.67)
'Л
откуда с очевидностью следует
X
(jy Согласно [Зб],
Mat
~
otm
1и
И
p.
• (3.69)
л
d
ij wkiexp('
i
,
,
*
** (ciy\2( /
■/ /оМ-Y f )3+.
7+
i-iiW\mxMi 3-3/lW/l7ra7/
’J'
^ 4. ■/ IdvWWp i /dty M3... .1
■
поэтому, учитывая, что в рассматриваемом случае с/уХбу/(Р(/)»/</,
и ограничиваясь з каждой квадратной скобке (3.70) одним слагаемым,
можно записать
X
4-0^- 1 fn
~ W ГпМ/Vy
(3.71)
Мв
Из (3.71) следует приближенное равенство
X
■>■ Рп
du
л. + п ^еч - -Р^(Ха) fa fvlclyc
"
А/Wh/ ~
’
(3.72)
потенцируя которое, получим выражение
(3.73)
мтЗ
Решая (3,73) относительно ^(х)н
49
, далее будем иметь
ИХ). - ±$ exp(-o.wt
X
Jp(K)dх).
(з .74)
'
Мох
При верхних знаках, соответствующих Х>Мох , и нижних, соот­
ветствующих Х<Мох, это и будет искомым уравнением.
Окончательно (3.74) совместно с (3.65) можно записать как
(3.75)
Аналогично для случая, когда известно D
X
,
еспи Ж/'<^ ;
(3.76)
ч>(х)н« 5
t^exp(- 0,781 i tyyDfp(x)dx), если 14>(х)н1>^
Мох
3.5.
Равномерное распределение аддитивной и нормальное
распределение мультипликативной погрешностей А и V
Для отыскания оптимальной характеристики *Р(Х)н при равномер­
но. распределении аддитивной и нормальном распределении мульти­
пликативной погрешностей вновь используем соотношение (3.33), за­
меняя в нем энтропийную погрешность Иу(х)^у(х) сигнала У ее
значениями. На основании данных П.В.Новицкого f3l] эти значения
в рассматриваемом случае могут быть выражены, в наших обозначениях
как
и
г
иа(х)^(х)^у1Ч>(х)и]ехр^№^ , если11>(хуцт^-. (3.76)
,гЦ 7 \ЛМ
*'
•s
50
Подставим (3.77) в (3.33) и запишем
№
,
±$exp(o,mglrt^
х
(3-79)'
о
*
Mat
Тогда, выполнив интегрирование, будем иметь зависимость, позво­
ляющую определить оптимальную Ч‘(Х)ц в случае, когда
1,199.
Для вычисления интеграла, стоящего в левой части (3.79), разложим
подинтегральную функцию в ряд Маклорена [Зб]:
ex р(о,l5^lf3(x)Hl- 0,938 1 №/) = / ’
Cty
g СлУ
j
-0,<м£1?Мн1+0,ОЗб^ХК+О,ftO#ltfx)„l+ • • ■
(3,80)
(лУ
ау
ау
и, ограничиваясь первыми двумя членами разложения, получим
ф(х)н
ф(Х)н
Пели тегэрь выполнить интегрирование, то в результате будем иметь
± (Ш-0,219я Ж[p(X)dX ,
(3.82'
МвХ
где знак "+" перед скобкой соответствует У(Х)н>0 , а
12(Х}н<0 . Решая (3.82) относительно Vfx)« , придем к
«,)-=iws('V'5w"^wM
'
’
(з:вз>
Мох
При верхних знаках, соответствующих Х>Мох , и нижних, соответ­
ствующих Х<Мох , это выражение можно рассматривать как уравне­
ние оптимальной V(X)h при 1У(Х)н1< 1J99.
Найдем далее уравнение *Р(Х)н
, оптимальной при
Предположим, подобно тому, как это было сделано в случае равномер­
ного распределения аддитивной и мультипликативной погрешностей,
что в рассматриваемом случае точкам оптимальной характеристики
№ = i <,<9И$
соответствует X sXt,z
., и построим
вывод уравнения'оптимальной
V(X)h
51
при )Ц>(х)н1> 1,!99&
на том, что
(3.84)
V3a
и
Ми
х
ЧМн
(3,85)
х*
Н.Ш&1
Просуммируем (3.84) и(3.85) следующим образом:
}
(3.86)
м«
и,ш¥3
С-помощью (3.81) и (3.82) легко определить, что первый интеграл,
стоящий в левой части (3.86), приближенно равен ±-@J~ . Второй
итеграл, заменяя
— на Z , нетрудно
—"Т" свести
---------- ' к,табличному,
что дает
" 1л}н
Win
_йзи4
'
<№fdj
'
М цмЩ
А
t zi № i,<MW3
<
t
U ' ffo &. <3.87)
о,жг<А
Л .
1
за л' W-4 ’' J ■
Учитывая это и ограничиваясь.в каждой квадратной скобке (3.87)
одним слагаемым, (3.86) можно представить как
,
X
+ 0,Ш - I Л,
..
yfXo) fn/j/Uy
(3.88)
■
’ А +
/^Vx)« ~
■
Мох
После преобразования (3.88) примет вид
+ Лэ
~ Ш№г(Х)н
или
+ J ygf: г/и^(Х‘) f fiMrjv
~ <’ вЬ ^р(Мм)^Х‘аХ ’
в результате потенцирования
t г expfalGS + 44ЙЧ ]рМ
Х
.
>yfrw«
'I
аур (Мм) J'
Мох
S2
/ '
(3.89)
(3.90)
Решая (3.90) относительно ?(х)н
, будем иметь
X
'
........... '
(3-91>
У(х)н * Ф /, 194 ~ exp I- 0,M3i
/У г\ '
оШМох)
Мох ?
что при верхних знаках, соответствующих Х>Мох, и нижних, соответствующих X< Мох , и представляет собой уравнение оптимальной
Ф(Х)н при 1<Р(Х)н1>
. Подобно (3.75) и (3.76) это
уравнение можно окончательно записать совместно с (3.83) как
X
/
Л
, если
±1,т^
(3.92)
,
;мм
I
или
Л
*SP(M°№x
через разрешающую способность JJ
как
(3.93)
м“ „
’Л*
n.teo^exp^ajBS3iOfiliX)fp(X)dx'), есм/ГМ/чю#,
Мох
3.6.
Арксинусоидальное распределение аддитивной и
нормальное распределение мультипликативной погреш­
ностей 4 и V
Задача об отыскании оптимальной WWu при арксинусоидальном
распределении аддитивной и нормальном распределении мультипликатив­
ной погрешностей принципиально не отличается от рассмотренных выше.
Однако в то время, как в предыдущих случаях для определения энтро­
пийной погрешности Цу(Х)<$у(Х)
сигнала У использовались извест­
ные выражения, в рассматриваемом случае такое выражение, в форме
удобной для отыскания оптимальной ^//^предварительно требуется
получить. Для осуществления последнего воспользуемся приведенным
53
в [31] энтропийным коэффициентом композиции указанных распределений
погрешностей
л
Uy(X) =
7
(3.94)
1 + Ру
где
v(X)
V~tf+(fyx) •
(3.95)
Умножим (3.94) на
(3.96)
и преобразуем произведение методом, описанным в [3l]. Применяя
этот метод, представим знаменатель (3.94) как
/+Р -
+
(3.97)
и запишем
и Mif м-
Я (4
Если далее обозначить
(3.98)
и представить (3.98) как
'1/S
г *
(Sewi
^
,
и
(3.99)
то, используя известные приближенные равенства
Zv-H
/
7^7
справедливые при
—z2
г
(3.100)
(3.I0I)
, получим
(3.102)
54
или
после обратной замены
(злоз)
-
.
Поскольку для арксинусоидального закона распределения энтропий­
ный коэ$фиЦиент
> а для нормального 0?=^^^
, при
этом бл-dy/Ui
и Уг <з7(х)=/у^(Х)н1/иг , то далее имеем
Цу(х)<зу(х) ^dyexp^SiO^iW-o^^l^Hl).
Это и есть искомое выражение
&У
Uy(x)dy(X)
(3.104)
(лу
, однако область его
применения, очевидно, ограничена условием
, что сле­
дует из справедливости соотношений (3.100) и (3.I0I) лишь при
.В случае, когда
, выражение для
Uy(x)f>y(x), удобное при отыскании оптимальной <?(х)н, по-видимому, бу­
дет другим. Для отыскания указанного выражения введем обозначение
Z^dif^tx) и представим (3.98) как
Из условия 1Ч>(Х)и1>1^б1-^- следует, что
, поэтому используя
приближенные равенства
. (3.106)
~
—4—(3.107)
справедливые при
, вместо (3.105) можно записать
/
I -z
<злоз,
Uy(X$y(X)xrfv(x)]l^
55
'
(3.109)
Прологарифмируем (3.109) и получим
. (з.по)
tn[Uv(x)6^^
Если использовать приближенные равенства
(З.Ш)
(3.112)
так же, как и (3.106), (3.107), справедливые при 2л < /
будем иметь
, то
(3.113)
что после потенцирования дает
u3(x)<Sy(x) * 67(x)ff ехр[
(< -
^)]
(З.П4)
и
(3.II5)
& ?\л)
Если теперь учесть, что
<3V(X)=^~^-, Ui=-~j=-,Ur*][i£,
/ !р(Х)н1 > 1,861-^
окончательно для случая, когда
-
то
, получим
(3.II6)
Найдем далее уравнения оптимальной 1Р(Х)н с помощью (3.104),
(3.II6) и (3.33) подобно тому, как это делалось в предыдущих па­
раграф ,х.
Подставим вначале (3.104) в (3.33) и запишем
W#
з
X
~ $exp(0JX5&lf[X^
(3.II7)
Мех
*0
56
Разлагая функцию, стоящую под знаком интеграла в левой
части (3.117) в ряд Маклорена, будем иметь
ехр(о,015^1^-0,520^1^1)= {-Ц520&ЩХМ+
+0,135$^х)н+0№$1ФЪ)>>1
*
■ ■• ’
ад
ад
что при ограничении ряда двумя.первыми членами дает
После выполнения интегрирования (З.П9) принимает вид
’(Х)«)» „Ж JpWz/x ,
± (№|- 0,260
яУ
(3.120)
riox
где "+" перед скобкой соответствует Ч(Х)н >
Решая (3,120) относительно Ф(х)н , получим
О, а
- ЩХ)н < 0.
X
/
что при верхних знаках, соответствующих Х>Мы , и нижних, соот­
ветствующих Х<Мох , представляет собой уравнение оптимальной У(Х)н
при
Для отыскания уравнения, пригодного при расчете оптимальной
характеристики У(Х)н' в случае, когда IVfXhl^f&Wdll/fy, подставим
в (3.33) выражения (3.104) и (3.II6) и запишем подобно (3.68) и
(3,69)
з
°
X
Ш)н
+ЮТехр(~^о1»р(м^х^Х' ■
' л
57
(3.122)
Первый интеграл в (3.122), который легко вычислить с помощью
(3.119) и (3.120), приближенно равен
*
.
^У
Второй же интеграл, вычисляемый аналогично (3.87), равен
Юн
Я
±1,861 dy/fly
=*
+
(3.123)
-O92fdi.-1L^ +
’ Я
2 2!
1,8в1Щ
3-3! fiS 1/61Щ
. .1
J-
В связи с этим, ограничиваясь в каждой квадратной скобке
(3.123).одним членом, имеем (3.122) в виде
X
+ 0Ж_ 1 f 1,8бМу ~ Г(Х',. (пМрх
(3.124)
Мт
или в виде
(3.125)
4ур(Мт)'>г
Мах
что после потенцирования дает
fiy'rKXjH
X
4. 1,8611Лгу „ pvnfj Q9J - ^У^(Хо) fn/v) Jy)
й eXp[^ + dyp(M»)
7 '
Мох
'
Решение (3.126)
(3.126)
X
± 1,861 ^exp(~y6D5±^^Jp(x)dx)
/У г< '
а<//дМох^“* ' /
Ч>(Х)н
(3.127)
при верхних знаках, соответствующих X >Мох , и нижних, соответ­
ствующих Х'Мох , является уравнением оптимальной У(/)и
при
/W«/>1,861 dyjfly
. Совместно с (3.I2Z) оно так же, как (3,74j
и (3.91),может быть записано как
1
,
Г
„,х
\
(ЗЛ28)
ТСОн
eall
t
Мох
,
.«in как
+ dy .
” 0 520fa
, (3.129)
, если
X
exp(-0,9605ti^p(x)dx), если1<Р(х)н1>^б^ .
№
Но»
±
3.7.
Дискретное двузначное распределение аддитивной
и произвольное непрерывное распределение
мультипликативной погрешностей 4 и V
Используя при отыскании оптимальных У(Х)н ■ в предыдущих
случаях соотношения (3.38), (3.60), (3.77) и другие им подобные,
характеризующие энтропийную погрешность Щ(Х)(зу(Х)
, мы, по
существу, исходили и? общепринятого представления о том, что
"энтропия случайных погрешностей, не разложимых на дискретную и
непрерывную составляющие, должна описываться на языке шеннонов­
ской энтропии" [3IJ. В случае же, когда одна составляющая погре­
шности подчиняется дискретному двузначному, а вторая составляю­
щая - некоторому непрерывному законам распределения,при описа­
нии энтропии суммарной погрешности исходят как из шенноновского
понятия энтропии Е31J, так и из колмогоровского в’ сочетании с
шенноновским [43]. В связи с этим при дискретном двузначном ра­
спределении аддитивной погрешности выходного сигнала У; измери­
тельного преобразователя и при любом непрерывном распределении
мультипликативной погрешности этого сигнала энтропийная погре­
шность Uif(x)dy(x)' может быть определена двояко: соотношением
Uy(xjdy(X) * 2J5ylV(X)njt
^3.130)
соответствующим первому подходу, и соотношением
Uy(X)dy(x) ~
.
соответствующим второму подходу [25].
59
(3.I3I)
Если воспользоваться для отыскания оптимальной Ф(х)н
соотношением (3.130), то, подставляя его в. (3.33) и интегрируя
результат •аналогично (3.51), (3.63) и т.п., будем'иметь
.jLf. . (/№ ~
(3.132)
. [рмЛ
dnp(Mat)j^)aX •
X
или.
•
0
jpwax ’
(3.133)
что, очевидно, лишено физического и математического смысла. Если
же использовать выражение (3.I3I), также подставляя его в (3.33)
и интегрируя подобно (3.51), (3.63) и т.п., получим
Ж
X
f ММн
УМ (пмЛу
(3.134)
~d9p(Mn)
’
Мех
"
или
X
^^[ln(d9^lv(x)Hl)-hd9]«j^^fp(x)dx,
(3.135)
что ни физическому, ни математическому смыслу не противоречит.
Отсюда следует невозможность отыскания оптимальной ^(Юн с помощь,
соотношения (3.130) и возможность - с помощью соотношения (3.I3I)
Приводя согласно атому (3.135) к виду
X
(злзб)
а затем к виду
I. &1Ю,1 К etpftj^.fptodx),
найдем уравнение г(Х)н
(ЭЛЗИ
г
Мп
, оптимальной в рассматриваемом случае ;
X
<злзв)
Мех
60
это уравнение может быть представлено
Ясно, что при известном D
и как
,
X
V(x)H»±^lexp(t2jiyI)fp(x)dx)-f].
(3.139)
Ми
Реализуя (3.138) и (3.139) с помощью известных методов, применя­
емых при проектировании функциональных измерительных преобразова­
телей, можно обеспечить надежность контрольного устройства, макси­
мально возможную при конкретных дискретном двузначном и непрерыв­
ном законах распределения погрешностей Л и V . Наиболее прием­
лемыми в данном случае, очевидно, будут методы, основанные на ис­
пользовании естественной нелинейности характеристик элементов и
деталей преобразователей, а также методы, основанные на применении
механизмов с переменным передаточным отношением [1,6,28,34,42].
Эти же самые методы вполне пригодны для реализации не только
характеристик, описываемых уравнениями (3.138) и (3.139), но и дру­
гих им подобных характеристик (рис. 3.2, 3.3), полученных ранее.
Рис. 3.2.
.
Примеры оптимальных характеристик ИП при равномерном
распределении контролируемого параметра и различных
законах распределения погрешностей1.А,В,С - нормальное,
равномерное и 8 - распределение аддитивной погрешности,
Е - нормальное распределение мультипликативной погрешноети
61
Рис. 3.3.
Примеры оптимальных характеристик ИП при'нормальном
распределении контролируемого параметра и различных
законах распределения погрешностей: А,В,С - нормаль­
ное, равномерное и
- распределение аддитивной
погрешности, Е - нормальное распределение мульти­
пликативной погрешности
Следует отметить, что в случаях, когда оптимальные
имеют по каким-либо причинам неприемлемый или труднореализуемый
вид, перед реализацией их можно заменить близкими к ним *Р(Х)н задан­
ного вида которые могут быть получены по оптимальным ОДк , напри­
мер, с помощью метода наименьших квадратов [40 ].
Оптимизация
по существу, - проектно-конструкторский метод
повышения технологической надежности контрольного устройства КСА.
Однако возможны и другие л^тоды, являющиеся эксплуатационными.
В качестве таковых можно рассматривать управление законом распреде­
ления контролируемого параметра и оптимизацию настройки элементов
контрольного устройства.
62
Глава 4.
4.1.
ПОВЫШЕНИЕ ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ КОНТРОЛЬНОГО
УСТРОЙСТВА С ПОМОЩЬЮ УПРАВЛЕНИЯ ЗАКОНОМ РАСПРЕДЕ­
ЛЕНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА И ОПТИМИЗАЦИИ
НАСТРОЙКИ ЭЛЕМЕНТОВ
Общий подход к повышению надежности с помощью
управления р(Х) . Управлениер(у) взамен
оптимизации ф(Х)н
Как известно, с помощью организационно-технических мероприя­
тий, влияющих на технологию производства различных изделий, кото­
рые подлежат контролю и сортировке, используя принципы теории не-.
, однородных распределений [45] , можно в определенной степени уп­
равлять законами распределения тех или иных контролируемых пара­
метров этих изделий, Осуществить такое управление проще всего пу­
тем обработки партий изделий на нескольких машинах. Поскольку каж­
дая машина имеет свою настройку и свои точностные характеристики,
то и закон распределения контролируемого параметра изделий, обра­
ботанных на некоторой данной машине, отличается от закона распреде­
ления контролируемого параметра изделий, обработанных на другой ма­
шине. Настраивая машины определенным образом и распределяя изделия,
подлежащие обработке, по нескольким машинам в определенных пропор­
циях,
можно упоавлять законом распределения контролируемого пара­
метра всей партии изделий.
В связи с т ,м, что технологическая надежность КСА в значитель­
ной степени зависит от плотности вероятности р(х) контролируемого
параметра, управление законом распределения указанного параметра
может быть использовано в качестве способа повышения технологичес­
кой надежности наряду с оптимизацией У(Х)н
рассмотренной ранее [lb].
При этом возможны три случая. Первый случай - самостоятельное при­
менение этого способа взамен оптимизации номинальной характеристи­
ки Ф(Х)и измерительного преобразователя контрольного устройства,
второй случай - применение управления законом ра лределения контро­
лируемого параметра совместно с оптимизацией ф(Х)и
при неограни­
ченной дисперсии X и третий слетай - т же, что и последнее, но
при ограниченной дисперсии X .
Остановимся на первом случае". Очевидно, что он может иметь
место тогда, когда оптимизация номинальной характеристики ф(х) изме63
рительного преобразователя по каким-либо причинам невозможна или
нецелесообразна. В этом случае характеристика *?(Х)н может быть, во­
обще говоря, л.лбой, но обязательно од. ээначной и в процессе эксплу­
атации автомата практи ески неизменной. Последнее влечет за собой
Г
(4.1)
что совместна с
X’
J/Wdx=/
(4.2)
X'
обусловливает
Х‘
X'
(4.3)
X
X
Если так же,как и при повышении технологической надежности путем
оптимизации
считать, что максимуму показателей надежности
контрольного устройства соответствует максимум
X"
у - Г НХШ fa
(4 4)
при ограничении (4.3), то подобно условию оптимизации ^(Х)н (3.28),
в рассматриваемом случае правомерно записать условие оптимизации
Р(Х)
’
?М~ turfMvW ’
Если далее вместо I
(4-5)
подставить его значение из (3.35), то получим
оптимальную функцию
PW------ -У-
.
м-6’
заменяющую оптимальную характеристику У(Х)н
(рис. 4.1). Реали­
зуя (4.6) путем управления р(Х) так, как это было описано выше,
можно обеспечить технологическую надежность контрольного устройст­
ва чикую же, как и путем оптимизации Щх)ц . Для упрощения реализа­
ции при этом, по-видимому, целесообразно учитывать естественное тя­
64
готение законов распределения параметра X при обработке на каждой
машине к нормальному, что -ледует из центральной предельной теоре­
мы теории ь^роятностей [40]. Учет указанного обстоятельства дает
возможность для обеспечения требуемой р(Х) обрабатывать партию из­
делий, подлежащих контролю и классификации, лишь на двух машинах,
и< пользуя приведенное в [4б] выражение
f
VXI
I (ш I
Vxz'
'
(4.7)
OXZ /
где p(jf) - функция плотности вероятности неоднородного рас-ределения, образованного смешением двух нормально распределенных сово­
купностей; (?xi и Mzi - среднеквадратичное отклонение и математи­
ческое ожидание параметра X в i -ой совокупности; dl - доля
элементов i -ой совокупности в совокупности, образованной смеше­
нием; pi - нормированная плотность д-го нормального распределе­
ния.
Р(Х1
Рис. 4.1.
Оптимальные законы распределения контролируемого
параметра при реальных неоптимальных характеристиках
измерительных преобразователей: I — для механотрона
6МХЗС', 2 - для пневматического преобразователя типа
"сопло-заслонка" с ! эжекторным соплом';
(dy - 0,025мкПа ,£у * 0,01)
65
4.2.
Управление р(X) совместно с оптимизацией
при неограниченной дисперсии контролируемого параметра
Рассмотрим второй случай повышения технологической надежнос­
ти контрольного устройства КСА путем управления р(Х) . Совершенно
ясно, что поскольку при оптимальной характеристике
выполняет­
ся уловие (3.28), (4.4) в данном случае принимает вид
X*
V"
t$pl(X)dx .
X'
(4.8)
Для того, чтобы обеспечить максимальную надежность путем управле­
ния р(х), очевидно, следует обеспечить максимум интеграла, входяще
го в (4.8), при ограничении (4.2). Как и в 3.1, используем для оп­
ределения условий достижения указанного максимума вариационный ме­
тод отыскания экстремумов, названный методом Эйлера.
Составим по (4.8) и (4.2) вспомогательный функционал
X"
X"
J*$Mx)+ap(x))dx« fv*dx,
(4.9)
X'
*'
где Q - произвольная постоянная, и запишем в соответствии с мето­
дом Е ллера
2р(х)+а=о.
'
(4.Ю)
Из (4.10) будем иметь
,
(4.II)
что после подстановки в (4.2) дает
а
4
'г'х^х1
(4Л2)
или
^'Т^Х1 '
66
(4.13)
Полученная функция плотности вероятности, являющаяся функцией плот­
ности равномерного распределения, соответствует экстремуму интере­
сующего нас интеграла, но не максимуму, а минимуму. Последнее лег­
ко показать на примере, если в (4.8) подставить (4.13) и функцию
плотности нормального распределения
(4Л4)
и Мх - дисперсия и математическое ожидание X . В первом
где 8
*
случае (4.8) при-’ет вид
У=У=р^7 ,
(4.15)
по втором случае
где $['] - нормированная функция Лапласа. Полагая Х'О,Х
6х = 15 [при аких данных правоме рно считать, что (4.2) выполня­
ется как для (4.13), так и для (4.14)] , будем иметь
V= iOQ
Поскольку V 4 V
’
У = ЗО]/Т ‘
■
(4‘17)
, то, очевидно, (4.13) условием максимума
(4.8) не является. Но так как
, соответствующее (4.13), псе-таки экстремаль (4.8), то значит она является условием миниму­
ма .
.
Для того, чтобы отыскать условие максимума (4.8), воспользу­
емся далее найденным условием минимума и подходом, примененным
п 3.1. Согласно этому подходу можно полагать,.что если условию ми­
нимума (4.8) отвечает равномерное распределение X в диапазоне
, то условию максимума отвечает распределение, наиболее отличнющееся от равномерного. Но таковым является вырожденное (причин­
ное) распределение
рМ--8(х-Мх),
где 8 - символ
(4Л8)
8 -функции Дирака (рис. 4.2, кривая I). Таким об­
67
разом, (4.18) и следует считать искомым условием.
Рис. 4.2.
Характер оптимальных законов распределения
контролируемого параметра при оптимальной
характеристике измерительного преобразователя
Осуществить управление законом распределения контролируемого
параметра такое, при котором бы в точности выполнился закон (4.18),
практически невозможно, поскольку при любой организации производ­
ства изделий, подлежащих контролю и классификации, невозможно обе­
спечить дисперсию dx контролйрУемого параметра, равную нулю. Од­
нако в процессе управления законом распределения X с целью повы­
шения технологической надежности контрольного устройства можно
приблизить этот закон к вырожденному, уменьшая
4.3.
Управление р(Х) совместно с оптимизацией ^(Х)н
в случае ограниченной дисперсии контролируемого
параметра
В ряде случаев уменьшение (йх до весьма малых величин осуще­
ствимо при относительно малых затратах технико-экономических ре­
сурсов. Зачастую же такие затраты оказываются довольно значитель­
ными. В подобных случаях (Эх обычно уменьшают не настолько, насколь­
ко это технически достижимо, а до некоторой величины, обеспечиваю­
щей заданное попадание параметра X в пределы допуска Т . Послед­
68
нее равноценно установлению конкретного значения (Зх , равного-^-,
где i - постоянный коэффициент, и влечет за собой необходимость
введения в задачу отыскания условий максимума интеграла в (4.а)
дополнительного ограничения
Xй
= dx= const.
(4.19)
X1
Вследствие этого, в то время, как при малых затратах на уменыпение (Эх до весьма малых значений управление р(х) можно свести
J,f , при значительных затратах на уменьшение
лишь и уменьшению (эх
Сцг управление р(Х) следует производить так, чтобы эта функция
обеспечивала максимум интеграла в (4.8) при ограничениях (4.2' и
(4.19).
Найдем функцию, обеспечивающую упомянутый максимум. Исполь­
зуя метод Эйлера, запишем вспомогательный функционал, соответству­
ющий рассматриваемой задаче:
Х“
X"
J = J (рг(х)+а<р(х)(х- Mx'fplx'ijdx ^V
dx
*
,
<4 -20 >
г
х'
где 0/ и di , подобно 11
вим далее уравнение
в (4.9), - некоторые постоянные. Соста­
zp(x)+at+at(x-Mif’O
и решим его относительно р(Х)
(4.21)
:
p(x)--j[a<+ai(x-Mx)1].
(4.22)
Если теперь найти Я/ и Qt , то функция (4.22), являющаяся экстре­
малью (4.8) при ограничениях (4.2) и (4.19), будет полностью опре­
делена.
Подставим для отыскания Q< и dz выражение (4.22) в (4.2)
и (4.19):
X"
-{■![a^at(x-Mx)l]dx^
X'
69
(4.23)
X"
- ^[dl(X-Mx)i+at(X-Mx)‘,]dx
(4.24)
X'
Выполнив интегрирование, получим из (4.23) и (4.24) систему ли­
нейных уравнений
+
(4.25).
,
(4.26)
Решая данную систему по правилу Крамера, будем иметь
det
deto
л - deti
“’"deto
’
(4.27)
где
deto =
(X‘-Mi)4x'-Mt)s
5
(4.28)
(4.29)
deli -
Г-МЛЧх'-Мх?
5
Анализ выражений (4.27) - (4.30) показывает, что d( - вели­
чина отрицательная, а О. г - положительная. Это означает, что экст;эмаль (4.22) имеет вид кривой 2, изображенной на рис. 4.2.
Указанная кривая, как следует из анализа ее физического смыс­
ла, подобно (4.13), обеспечивает не максимум (4.8), а минимум. Поэ­
тому для отыскания функции р (X) , обеспечивающей максимум (4.8) в
рассматриваемом случае,исследуем далее полученный результат и вновь
применим подход, аналогичный использованному ранее.
70
Как уже отмечалось выше, интеграл в (4.8), тем больше, чем не­
равномернее распределение р(х) . Степень неравномерности р(х) , в
свою очередь, тем больше, чем быстрее увеличивается модуль произ­
водной dp(X)JdX с приближением
к модальному значению. У кривой
же 2 на рис. 4.2 модуль производнойdp(X)/dX не только вообще не
увеличивается, но убывает до нуля. Из-за этого она и доставляет
минимум выражению (4.8) при ограничениях (4.2) и (4.19). Для того,
чтобы функцияр(Х) доставляла (4.8) не минимум, а максимум, достаточ­
но, чтобы ее производная была обратной производной функции, достав­
ляющей минимум. Поскольку для (4.22) имеет место
4№ = -Ьг(Х~Мх),
(4.31)
ЫЛ
т.е. прямая пропорциональность производнойвеличине (Х'М»),
для искомой функции должно быть
,
=
dx
(4.32)
*
х-М
т.е. обратная пропорциональность этой величине (здесь h - коэффи­
циент пропорциональности). Если, учитывая это, проинтегрировать
(4.32) следующим образом:
(4.33)
,
то получим
p(X)^bi'l)itnlX'Mi] ,
(4.34)
где ft/, - постоянная интегрирования. Выражение (4.39) при извест­
ных значениях
и
и будет представлять собой функцию плотнос­
ти вероятности, обеспечивающую максимум интеграла в (4.8) щ I огра­
ничениях (4.2) и (4.19). Отыскать же значения
и Ot нетрудно, по­
добно тому, как это было сделано для
и Hi . Достаточно лишь под­
ставить (4.34) в (4.2) и (4.19):
X"
*1,
X
71
(4.35)
X"
:
(4.36)
X'
Выполнив интегрирование, получим систему уравнений:
^(X'-X')-Sl[(X’-MxK^IX-Mxl-O-tX-Mx^tnlX-Mxl-^ {,
(4.37)
решение которой по правилу Крамера непосредственно дает
(4.39)
где
(Х‘-Х')
-А
deto =
deft =
det г =
(4.40)
1
б*
(х’-х?
(X‘-MJ4xW
-А
-В
/
(4.41)
(4.42)
А - выражение, записанное в квадратных скобках в (4.37); В - мно­
житель пр», йг в (4.38).
Функция (.4.34) имеет вид кривой 3 н рис. 4.2. В точности ре­
ализовать ее на практике, также как и функцию (4.8),невозможно.
Однако в каждом конкретном случае ее можно заменять той или иной
слизкой к ней функцией, реализуемой достаточно просто (например,
функцией плотности нормального распределения).
Для оценки степени близости при этом, по-видимому, правомерно
использовать критерии согласия Пирсона, Колмогорова или др., приме­
няемые при прове,хе статистических гипотез о законах распределения
[40]. Эти же критерии, вероятно, можно использовать и при оценке
близости функций (4.6) и (4.7).
ПО
Перейдем далее к задаче оптимизации настройки элементов
контрольного устройства.
4.4.
Оптимизация настройки квантователей на
но минальные пороги срабатывания
Как показывает предварительный анализ, общая задача повыше­
ния технологической надежности контрольного устройства КСА путем
оптимизации настройки элементов распадается на три отдельные зада­
чи - оптимизаци' настройки квантователей на номинальные г роги
срабатывания
, оптимизации смещения настройкиЛ/ квантователей
относительно этих порогов и ’бп,г мизации смещения настройки начала
отсчета измерительного преобразователя относительно нуля. Рассмот­
рим первую из указанных задач [18].
Как правило, во всяком КСА применяются : кантователи одного
типа. Несмотря на это, в связи с нестабильностью технологических
процессов при изготовлении квантователей, их пороги ’Чувствитель­
ности £i , как уже отмечалось ранее, при одном и том же пороге
срабатывания неодинаковы. В процессе настройки или сборки контроль­
ного устройства любой квантователь, имеющий определенный порог чув­
ствительности, может быть настроен на каждый из требуемых номиналь­
ных порогов срабатывания Vfyilii, однако, в зависимости от того, на
какой из порогов срабатывания настроен тот или иной квантователь,
технологическая надежность контрольного устройства даже при оптима­
льных р(х)и^(Х)и оказывается различной. В соответствии с этим возника­
ет рассматриваемая задача, смысл которой состоит в обеспечении та­
кс й настройки квантователей на номинальные пороги срабатывания
при которой технологическая надежность контрольного устройства с
данной характеристикой У(Х)н и при данном законе распределения кон­
тролируемого параметра р(Х) будет_максимальна.
Поскольку погрешности A uAi, возникающие в процессе настрой­
ки контрольного устройства, не влияют на®(Х1)и,’ для решения постав­
ленной задачи положим
Л
и воспользуемся показате­
лем надежности (2.33) в виде
п-1 Хк+<
()н~Ек
У(Хк
*<
\p№dxfyMx)ii)dy.
(4-43)
73
Очевидно, что для конкретных квантователей, примененных в
контрольном устройстве автомата
П
£Ei.
*C
£
1’1
’COn$t
(4.44)
и оптимальной настройке квантователей на номинальные пороги сра­
батывания соответствет максимум (4.43) при ограничении (4.44).
Найдем условия достижения указанного максимума, используя ме
тод неопределенных множителей Лагранжа [в]. Для этого составим
функцию Лагранжа:
...
.
П-< Хк-н '?1Хк
*1)н-Е
м
п
F sXip(x}^(y,W^dy^c(CE-^Ei),
™ Хк
(4.45)
где С - неопределенный множитель, и, применяя правило Лейбница
[44], вычислим ее производную по £«+/;
Хкя
~^р(Х)1}(Р1Хкн)и-Еш, Ч>(Х)н)с1х
№1
и
ЛК
(4.46)
v
AKtl
-с.
Пола, ая, что
[ррЩУМи-Екн,
Хк
® р(Хки)(^(Хк
*<)н
*1)н->-Екн,9()(^н1^^^^
-Ем,^(Хкн)н)^^^+р(Хы]11^Хк
и
*
(4.47)
приравнивая (4.47) нулю, получим соотношение
Z£(V(Xк+<)и " Екн^Хы^^^^Хт)» +Е к+/,У(Хк«/)и) *
iC
*1р(Хкн)(Хк
~Хк}
’
(4.48)
-
которое, очевидно, является условием минимума (4.43). По аналогии;
с предыдущими задачами из него будем иметь (рис. 4.3) искомое ус-!
ловие максимума
^(Хкн)н-Екм,ШЙи)+^(Ч,(Хкн)и+Екм,Ч’(ХкнЦ“
- *Е'р(Хк
г~Хк)
1)(Хк
t
где Г - коэффициент пропорциональности.
74
(4 49)
Рис. 4.3.
К оптимизации настройки квантователей на
номинальные пороги срабатывания
С помощью соотношения (4.49) томно непосредственно устано­
вить, какой из квантователей контрольного устройства необходимо
настраивать на тот или иной порог срабатывания У(Хы)ц. Для этого
нужно вначале экспериментально или каким-либо другим способом оп­
ределить
при всех X , равных Хы , ььгем по (4.49) оты­
скать теоретические оптимальные значенияЕк+< , соответствующие
, последовательно упорядочить их либо по возрастанию,
либо по убыванию, после этого аналогично упорядочить реальные зна­
чения порогов чувствительности El квантователей, примененных в кон­
трольном устройстве, и перенести индексы членов первой последова­
тельности на вторую, не меняя порядка их следования друг за другом.
Зная,какому квантователю соответствует каждый.реальный порог чувс­
твительности, далее можно настроить все квантователи на требуемые
пороги срабатывания.
Отыскание теоретических оптимальных
, предшествующее на­
стройке квантователей, в общем случае является довольно трудоемкой
процедурой. Для того, чтобы трудоемкость уменьшить, при эксперимен­
тальном определении ^////^целесообразно использовать универсальное
75
представление функции плотности вероятности выходного сигнала У
измерительного преобразователя контрольного устройства
wnwWWl-e1'х
у-(т-е) I11)]
хехр I у-(т-е) w .
<I
i4-“’
/1 ’
где V и 0 - коэффициенты, зависящие от вида закона распределе­
ния У 5 Г('У - гамма - функция,
/М=Ж-
гпакое представление, являющееся дальнейшим обобщением представле­
ния, предложенного в [32], пригодно для подавляющего большинства
случаев, встречающихся на практике, и позволяет описывать симмет­
ричные одно- и двухмодальные законы распределения сигнала У .
При этом, в частности, для двухмодальных распределений 0 принимает­
ся равным половине расстояния между модами У , а для одномодальных
- нулю. Полагая в последнем случае V = I, из (4.50) можно полу­
чить функцию плотности распределения Лапласа, 9=2- функцию
плотности распределения, близкого к трапецеидальному, 9>2 - рас­
пределения, близкого к равномерному. Если подставить (о.50) в (4.49),
то условие максимума (4.43) при ограничении (4.44) примет вид
______ V ......... . IpI
Е К-Н +В_ _ _ ) J.
I/
(4.51)
Опредс 1яя Г* путем итерации с помощью соотношения (4.44) и решая
(4.51) относительно Ек+<
, можно найти теоретические значения
оптимальных Ем . Разумеется, решение (4.51) приВ>0 также трудо­
емко, поскольку Екн в данном случае приходится определять подобно
Г итерацией. Однако при 8
*0
из (4.51) сразу же следует
1) .—;--------------------------- :-------------- -
Ем ^(V)6n(XK^ln,
и вычислить теоретические оптимальные.
не составляет.
76
Ем
(4.52)
значительного труда
Совершенно ясно, Ч’.о соотношения (4.49), (4.51) и (4.52)ориентированы на применение в условиях, когда Ei не зависит от$(х>)н
Если же Ei =8i|4,(Xi)«l
(см. 2.2), то вместо (4.44) имеем
п
*
YJA
*
Ct
CQMt,
(4.53)
iM
уравнение Лагранжа принимает вид
ы Хм Ь~^м)Т(Хм)н
л
F *Е jp(x)dx!^yMd^c(ci-X^i)
**' X* (1Чк)Ч>(Хк)н
isi
и
(4,54)
ЯС
37— = ~1^(Хм)к1 $р(Х)О((1~Екн)Ф(Хм)и,1р(Х)и)£1Х ~
и
(4.55)
Хш Хк
~/Ч>(Хк
/)н/^р(Х)0^1
*
+£м)^(Хм)н,9(Х)н)1/х* С .
Хм
Выражение (4.49) при этом превращается
в
[o((i- ЕмМХм^ЩХмрд+О^+ЕмУЩХ/^н^Им)»)]
*
/
г Х"/,***
*<)(Х
Р{Хк-и)п]р(Хк
~Хк)
(4.56)
;
выражение (4.51) принимает вид
______
______
Груд/ I ^м)(?(Хм)^8
р'ВДы-/¥1
|^\ +
J
-
<4-6”
а. выражение (4.52)
t4-bb)
IM>I F
Использовать соотношения (4.56), (4.57) и (4.58) можно аналогично
выражениям (4.49), (4.51) и (4.52) с той лишь разницей, что для
определения Г при этом следует применять не (4. ±4), а (4.-53).
Остановимся далее на второй задаче оптимизации настройки элементог
контрольного устройства.
77
4.5.
Оптимизация смещения Ai , настройки квантователей
относительно номинальных порогов срабатывания ^Xi)»
Представим показатель технологической надежности (2.32)
в виде
У(Хкя)н + Л«И"Е КН Хк+t
Р'(Ук<У<Укн)=/
dy
jp(x)^y,^))dX‘
Лм-Ем
*
Ф(Хм)и
Ч>(Хк)н+Ак+Ек
Хк
Хм
У(Хм)и+Лм-Ем
(4.59)
*
\p(x)dx
P^yyixjjdy,
^(Хк)н+Лк+Ек
ЧЦл^н+Лк + Ек
Хк
где
Хм
Xm-xJW^
*
’
(4.60)
лк
Рк - вероятность попадания значений контролируемого параметра X
в интервал [Хк,Хкн] . Запишем этот показатель для двух смежных
интервалов [Х»/,Хки] и [Xk,Xk*i] как
Ч>(Хш)к+Л.м.~ЕК+2.
Р (Ум^Уш) *Р/М^(У P?(Xl»<tydU ;
(4.61)
У(Хм)н *
Лм
Е
У(Хки)н +Лкн~Ек-н
Р\Ук<У<Укх)--Р<!^y,y>CxK))dy,
(4 б2)
У(Хк)н+Лк+Ек
где ЧЦХм) и Рк+1 аналогичны Ч^Хк) и Рк .
нетрудно заметить, что в зависимости от знака смещение Лки для
(КН) -го квантователя относительно номинального значения У(Хм)н
полога срабатывания этого элемента приводит к уменьшению Р (Ум^Уич)
и увеличению Р'(Ук<У<Ум) , либо к увеличению Р'(Укг<<У<Ум)
и уменьшению Р'(Уч<У<Укн) .
(
Степень влияния Лк-н на Р(Ум (У<Ук
*г)
и Р'(У
*<У<У><«)
различна, в связи с чем могут существовать такие
76
, при’
которых Р(Ух-н<У<Уки) увеличится больше, чем уменьшится
Р'(Ук<У<Укч) , или Р'(Ук<У<Укн) увеличится больше, чем умень­
шится Р'(Ук+1<У<У1«г) . В результате может оказаться, что при
некотором Лк+itO величина
*,•/
/?
-Р‘(Ук<У<Ук.^р'(^1<У<УKfl)
будет больше, чем при Ам=0
(4.63)
, что повлечет за собой увеличение
WXkJh+Aкн~Ем
Рг , поскольку
Р^Е
п.г
Kst **
Wh*E
A"
(4.64)
k
=+Р\У, <У<У^Р'(Уп-< <У<Уп)).
Таким образом
*,
наряду с ранее предложенными способами повышения
технологической надежности контрольного устройства, может применять­
ся также способ, состоящий в преднамеренном смещении настройки ква­
нтователей относительно их номинальных порогов срабатывания.
Преднамеренное смещение Лкн можно считать оптимальным, если
оно обеспечивает максимум Rk,k*i
при неизменных значениях дру­
гих величин, входящих в (4.61) и (4.62). Учитывая это, оптимальное
Anti m-jKho найти с помощью производной Rk,k*< по Аки .
Представим (4.63) как
^Х^Лкн'Е К+1
9(14 +Лкн *Е
-и
~ Рк fy(У, (Р(Хк)ХУ ' Ркн
У(Хх)н+Лк + Е к
У, Xz> Kft^(/y
**
Ч^Хк^н+Лк
(4.65)
*
-Ек
и вычислим
*ч)н М кн ~Evf, У(Хк)) ~
- Рк
~РкнЦ((Р(Хкн)и +Ак
*<+Еки,
,
(4.66)
приравнять к нулю, то получим
Если теперь
цЛк>1
AM м -Ек
1,
*
^(•Р(Хк+<)н+Л|с
*<
ША) _ <
**
Р
+ Emi, W(Xk*
$
Рк
К этому же результату придем, если
иЛк+1
79
.
(4.67)
ЗА
рассмотрим как ~z =■
дЛм
.
Анализ физического смысла (рис. 4.4) соотношения (4.67) по­
казывает, что максимуму (4.65) оно соответствует, и, следователь­
но, является условием оптимизации Лкч . Решая это соотношение
отнссительноЛкн при известных (на ример, найденных эксперименталь­
но) законах распределения ^(У,^(Хк)) и ^(У, Ч^Хш)) выходного сиг­
наль У измерительного преобразователя, входящего в состав контро­
льного устройства, можно непосредственно определить оптимальное
Аки при данном К . Придавая далее индексам К значения от /
доП-/ , аналогично можно вычислить, а затем и практически реали­
зовать оптимальные преднамеренные смещения настройки для всех
квантователей контрольного устройства.
Рис. ".4.
К оптимизации смещения настройки квантователей
относительно номинальных порогов срабатывания
Следует отметить, ч.о в процессе расчета, также как и в пре­
дыдущей задаче, целесообразно использовать универсальное представ
ление ^У.^Х))
(4.51), что позволяет привести соотношение (4.67)
к более конкретному соотношен-'ю
60
Рк)
11Ж.ШЙГ I / Т Ж feS-pf I / _
CXl/ I *?У^ш)н
ЛЕыФ(Хк^~8кг1
к
*4^ f руп/\^м)и^К
*ХЕкч^(ХхН^В1»1
'j
\ J ^^(^-8^ / \ I
/
pyn[JWXdx+Aw~EM~f(X)r)'0itl
Рхп( Шн^гЕ^гШ-8х
(4Ф63)
_ Ркч\>м})МГ(^кр/^гу(Хк) - 8гк
°к Рк/Ц\)М)Г(^/)кн]убу(^ки]'9^1
где Л , 8к к <э. (Хк) - величины Р , в , (ц(Х) , соответствую­
щие
, а рхч , 0м
, бу(Хы) - эти же величины, но
соответствующие Щ?) - <Р(Хм), Решение (4.68) относительно Лкя ,
очевидно, возможно известными численными методами.
Рассчитывая оптимальные Лм , необходимо также име^ь в ви­
ду, что в случаях, когда пороги чувствительности £i квантовате­
лей контрольного устройства не постоянны^ а равны Ei = Ei|V(Xi)l =
“Eil’FlXpH+All, условие (4.67) оптимизации Л к*-/ неприемлемо. В таких
случаях
(7+6м)(^/Хк
*р«
({-^^(Хкн^Лкц}
-н)
*Л
(4.69)
(7+Е к) ( WW
*
+Л к)
и Дгн
*£
f/
&t)( fX ка) н *Л Ktz)
'
(4.70)
~(1Чхкн)Ры11,((№™)($Хкн)и?Л&1)гР(Хк
*1))
и условие оптимизации Л &f имеет вид
_ Ркц(^8ки) .
*-Р/<М«-Р>У(ХЛ)
^///~£^ЯУ/Хх
^,(({+£кн)(ф(Хк»<)и+Л х«(), ^(Хпи^
(4.71)
Рк.(1~Е к*<)
Применяя его подобно (4.67), можно найти оптимальные преднамерен­
ные смещения настройки для всех квантователей.
В частности, используя (4.51), будем иметь
I [!-Еки)(^>(Х1<и)и/Лкч)~^(Хк-)'&(
I
Нк^(ХМм)-НШ^\
I/
ШШгЛкнЖ/Чи Ч
^х}^(Хк^)~8кч
/
(4.72)
Pk(1"£k*|) ^к/^»^'(^к^1^(/к
1)~6кй
*
откуда оптимальные Лк
*/
можно получить итерацией.
Рассмотрим далее третью задачу повышения технологической
надежности контрольного устройс.аа КСА путем оптимизации настройки.
4.6.
Оптимизация смещения 4 настройки начала отсчета
измерительного преобразователя относительно нуля
Настраивая квантователи на требуемые пороги срабатывания и
стремясь обеспечить оптимальные смещения Аы
, мы все же
никогда не имеем возможности добиться абсолютно точного равенства
всех реальныхЛк
/
*
соответствующим оптимальным значениям. В любом
практическом случае отклонения реальных Лк*/
от оптимальных сущест­
вуют и уменьшить их влияние на надежность контрольного устройства_
можно лишь в определенной степени путем преднамеренного смещения Л
настройки начала отсчета измерительного преобразователя, входящего
в контрольное устройство Подобно оптимальным Ахи , очевидно,
может быть и оптимальное Л , которое аналогично рассматриваемым
ранее задачам, по-видимому, следует отыскивать из условия обеспе­
чения максимума Рх . Нахождение и реализация такого 4 при Al = Const ,Ei-const =
и неизменных ^(Х)н и р(Х) и составляет
существо задачи повышения технологической надежности контрольного
устройства КСА путем оптимизации смещения начала отсчета измери­
тельного преобразователя.
Прежде чем непосредственно перейти к решению задачи, предста­
вим Pt в удобном для решения виде. Записав выражение
Ф1ХкРч+Ак/-гЕк+1
n-j Ххн
!p(x)dx^rW^)diJ =
WMtfx
(4-73)
n ( f (XK<-l)n+AЫ~Ех<-1
=EPx^(X^)dU ,
гДе
+
*1
Хк
^x^—L—^dX ,
ЛК ГАК J
*
А
предположим в связи с малостью
Г
и
(4.74)
ZJ
, что
(4-75)'
Аналогично
(MX>&№W ,
<4.76)
а поэтому правомерно считать, что
Ф(Хки)и •Ам~Екн
Ф(Хк+<')н+Лкн"А”Ек+<
~ ^У,Ч(Хк)н^У .
(4.77)
Ч>(Хк)н+Лк+Ек
У(Хк)н+Л к~Д+Ек
Если в (4.73) произвести замену, согласно (4./Z), то получим
п~1
^(Хк^н^Лм-Екч-Л
P^EAfj(№\)x)dy.
(4.78)
*='
Ж)и+Лк^к-Д
Это и есть выражение г£ , удобное для решения задачи.
Найдем теперь условие, при котором (4.78) достигает максимума.
Для этого продифференцируем интересующее нас выражение по Л и бу­
дем иметь
п.{
Ем'Л^Хк)»)К-^<1>(Х^^Ек-А,<Р(Хк)и)] -
Приравнивая (4.79) нулю, получим (рис. 4.5) условие максимума /j
n-i
~ЕРкЫ^(Хм)н-,'Лк
1-Е
*
к=<
г
- ^(Хк}н+Лк+Ек~А
кч-А г^(Хк)н)~
^(XkJh)] = 0
(4.8С)
.
Использовать полученное условие при настройке контрольного
устройства можно подобно (4.49), (4.67) и т.п. Для этого, зная
номинальную характеристику У(.Х)н измерительного преобразователя,
входящего в это устройство, следует вначале рассчитать все 1?(Хк)н,
затем, настроив контрольное устройство так, чтобы име о место
Л~0 ,экспериментально определить все (£(У,^(Хк)и) , . Далее по
заранее заданным Xi , р(Х) и ^(х)н вычислитьф^и V(X»i)h и после под­
становки всего_этого в (4.80), решить последнее численным методом
относительно Д . По окончании расчетов остается лишь сместить
83
?ис. 4.5.
К оптимизации смещения настройки начала отсчета
измерительного преобразователя относительно нуля
начало отсчета измерительного преобразователя на найденную величи­
ну. Разумеется, также как и в предыдущих задачах, при этом может
быть применено выражение (4.50), которое позволяет представить
(4.8С) как ,
I /
I ОХв(
(481)
I /
U
11 г^г//ядаг”/ /г
или, при
вк-0
+
, как
г
Ln/_
- Pxnl- I
еЛ/
XWW
-п
I /Г
Применение (4.81) и (4.82) аналогично (4.80).
84
Вообще целесообразно'отметить, что все полученные выше соот­
ношения, касающиеся повышения технологической надежности контроль- *
ного устройства путем оптимизации его настройки, по-видимому, ..аиболее удобно использовать вместе, в составе общей методики настрой­
ки контрольного устройства. Такая методика может представлять со­
бой, например, следующее:
1. Настроить измерительный преобразователь контрольного ус­
тройства так, чтобы 4 было возможно ближе к нулю.
2. Снять тарировочную характеристику преобразователя
•
3. По априорно заданным Xi и р(Х) и снятой *Р(Х)н
рассчитать
p(Xi), У(Хг)н, tf(Xx)u/ 1Р(Хки)и, Рк и *Рк
<
при всех L или К
4. Экспериментально или по паспортным данным квантователей
определить Е1 или Ei при всех L .
5. Экспериментально определить
при всех I и
{Х(У,1Р(Хк)н) и
при всех К.
6. Используя соотношения (4.49) и т.п., установить, какой из
квантователей на какой из номинальных порогов срабатывания следует
настраивать.
7. Используя соотношения (4.67) и т.п. рассчитать оптималь­
ные Лi при всех i .Произвести настройку квантователей.
f8. Экспериментально определить реальные Л) при всех L.
_9. Используя соотношения (4.80) и т.п. рассчитать оптималь­
ное 4 .
10. Произвести _настройку измерительного преобразователя по
результату расчета Д .
Разумеется, описанная методика применима, если в процессе
эксплуатации автомата не происходит изменение настроенных значений
А и Ai . Если же указанное изменение происходит, причем интен­
сивности его соответственно равны fa-d&ldt и Al =dAl/dt, то методика
дополняется расчетом "упреждений": Alon » — у0^п Д dt
, и
Л1доп‘—^0J'"' Aidt
. , где tn - интервал времени „;ежду
поверками или поднастройками контрольного устройства автомата;
оптимальные величины Д и Ai должны быть скорректированы на величи­
ны Адап и Aiion.
Повышение технологической надежности контрольного устройства
КСА оказывает суще ;твечное влияние на надежность всего автомата в
целом. Однако заметное влияние оказывает и повышение надежности .
системы переработки контрольной информации, которое можно обеспе­
чить, в частности путем рационального кодирования.
85
Г'лава 5.
5.1.
ПОВЫШЕНИЕ ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ СИСТЕМЫ
ПЕРЕРАБОТКИ КОНТРОЛЬНОЙ ИНФОРМАЦИИ ЗА СЧЕТ
РАЦИОНАЛЬНОГО КОДИРОВАНИЯ
Рациональное кодирование как способ повышения
надежности
Рациональное кодирование было предложено более тридцати пя­
ти лет назад в технике связи как способ сжатия сообщений и повыше­
ния эффективности использования пропускной способности каналов их
передачи [ЗО,Зв] . Однако в дальнейшем оказалось, что оно может
являться и средством повышения надежности. В пятидесятые годы ра­
цион; льное кодирование как средство повышения надежности начало
интенсивно использоваться в вычислительной технике [37,4б], а в
шестидесятые годы - в технике создания рабочих машин - автоматов,
в частности, позиционных систем числового программного управле­
ния металлорежущими станками [ы]. На сегодняшний день способы
повышения надежности путем рационального кодирования разработаны
достаточно глубоко. В связи с этим в настоящей главе не проводят­
ся исследования, аналогичные описанным ранее, а рассматриваются
лишь вопросы применения методов рационального кодирования контроль­
ной информации в КСА, в частности, методов статистического и груп­
пового кодирования, применения кодов, обнаруживающих ошибки, и оп­
тимальных взвешенных кодов. ’
5.2.
Статистическое кодирование
/чализируя показатель технологической надежности СПКИ [2б]
г-EMptt.-t-t.'i
(5.D
г
!
К'Тр h
и его вывод, нетрудно обратить внимание на то, что в силу (2.20),
(2.21) и (2.22), при р($) , изменяющемся при изменении $ , величи­
на Ь зависит от отображения /? на К
г>
U , г,.../.
Очевидно, что отображение
при N=rM интервалах сортировки
может быть реализовано N! способами, образующими N! - множество 6.
86
Ввиду статистического характера параметра, контролируемого авто­
матом, значения & образуют аналогичное N! - множество
, эле­
менты которого в общем случае различны. В связи с этим одним
методов повышения технологической надежности систем переработки
контрольной информации в КСА может являться статистическое (учи­
тывающее закон распределения контролируемого параметра) кодирова­
ние интервалов сортировки, т.е. установление такого
~
»
при котором
Для отыскания
обозначим кодовые комбинации Г индексами
так, что
(5.2)
+<
где
(5.3)
5
зсть вероятность аппаратурного отказа системы переработки конт­
рольной информации при переработке комбинации Г .
Тогда каждому
G однозначно будет соответствовать определен­
ная Л/ - перес.ановка индексов j€ I . Если все
/V-перестанов­
ки упорядочить по возрастанию, принимая во всякой паре перестано­
вок за большую ту перестановку, в которс 1 при минимальном de {0,1,2,
■■
больше (N~d) -й индекс, считая справа, то Lty') можно рас­
сматривать как функцию, определенную на отрезке,последовательными
точками которого являются элементы упорядоченного множества N -пе­
рестановок. Двигаясь вдоль отрезка от точки к точке, нетрудно осу­
ществить направленный поиск (J
* и $
.
*
Алгоритм перехода от точки к
точке, который удобно использовать в данном случае, представляет
собой модифицированный алгоритм направленного перебора /V -переста­
новок, позволяющий формировать каждую [1+1Г(СО~1)!] -ю перестанов­
ку, где U =0,1,...; СО - некоторое наперед заданное число, ле­
жащее в пределах от I до А/ и устанавливающее требуемый интервал
между исследуемыми точками области определения Ь^'). Указанный
алгоритм может быть организован с помощью так называемой "произвс дящей" перестановки по следующим правилам:
87
1) в качестве производящей принимается любая заранее задан­
ная перестановка символов, численно равных индексам;
2) всякая последующая перестановка образуется из предыдущей
путем замены символа, стоящего
позиции X при Xs й), W + /,
и)+2 , . .., Л/
, ближайшим к нему большим символом из
числа стоящих в позициях 1,2 ..., Х-/ с последующим расположением
символов в последних по убыванию;
3) замена символа, стоящего в позиции X , производится тог­
да, когда в позициях й),
&М,.
символы расположены в по­
рядке возрастания, или когда при X =
символ, стоящий в (j) -й
позиции, больше символа, стоящего в
((<?+/) -й позиции;
4) при выполнении операции по п. 2 и 3 позиции расположения
сим’олов в перестановках нумеруются числами 1,2 .... /V справа
налево.
На основании сформулированных правил с помощью алгоритмичес­
кого языка ЯЛС нетрудно составить операторную формулу алгоритма,
ориентированную на применение ЭВМ [э]:
UoQiQz JSsQ/iJQsQePtLQg JSsP/oTQu~
*
’
~F«(6)LJQl>O«LJA<sFMP..Lflll,
<5-«
7 3 Ч
i S
Z
где У о - оператор начала; Qi - оператор формирования производящей
перестановки; Qi - оператор нумерации позиций производящей пере­
становки, 3 з - оператор вынесения подученных перестановок в стан­
дартные ячейки; $4 - оператор формированияХ=(х) ; Q& - оператор
выбора элемента d из X -й позиции последней перестановки, выне­
сенной в стандартные ячейки; $6 - оператор формирование''числа
равного наибольшему из элементов, стоящих в позициях 1,2,...,Х-/1
Р' - оператор проверки d'<0 ; Qi - оператор выбора наименьшего
элемента у из позиций 1,2...,Х-/ последней перестановки, вынесен­
ной в стандартные ячейки; Зз - оператор засылки j6 в стандартную
ячейку; Рю - оператор проверки
; Qu - оператор выбора наи­
меньшего элемента ^>fi из позиций 1,2,..., Х-/
последней пере­
становки, вынесенной в стандартные ячейки; Fiz(jF) - оператор заме­
ны £ новым значением, равным у ;
- оператор транспонирован, я
символов d и^ в последней перестановке, вынесенной в стандарт­
ные ячейки; Qu - оператор упорядочения символов по позициям 1,2,
...,Х~1
по усыванию; Ais - оператор вычисления X'/ ; Fts(x) -
88
оператор замены X числом, полученным оператором Л/f ; Рм~
- оператор проверки Х>/7 ; P/s - оператор окончания перебора.
Если в качестве производящей вначале принять перестановку,
являющуюся совокупностью символов, расположенных в порядке убыва­
ния справа нал во, то вычисляя
при значениях
, соот­
ветствующих точкам, найденным при некотором W
, легко можно вы­
явить такие
в окрестности которых достигается
Переходя далее к полному перебору g' и принимая за производящие
перестановки меньшие из полученных по формуле (Ь.4) ближайшие к J**
нетрудно отыскат.
, а затем, если потребуется, рассчит-ть 6* .
5.3.
Применение кодов, обнаруживающих ошибки
В то время, как статистическое кодирование обеспечива т мини­
мум вероятности ложного адресования проконтро. ipo ванных изделий
за счет использования статистических свойств контролируемого па­
раметра и уменьшения вероятности сбоев в СПКИ, коды с обнаружени­
ем ошибок позволяют ■■'меньшить вероятность ложного адресования прин­
ципиально иначе. При их использовании вероятность сбоев не умень­
шается, но большинство из них приводит к появлению так называемых
"запрещенных" кодовых комбинаций, которые вызывают попадание изде­
лий не в обычные сортировочные отсеки, соответствующие "разрешен­
ным" кодовым комбинациям, а в специальный дополнительный отсек отсек неопознанных изделий.
•В настоящее время известно значительное число кодов, обнару­
живающих ошибки, однако для КСА пригодны далеко не все из них.
Это вызвано тем, что, как правило, с увеличением обнаруживающей
способности кода возрастает его информационная избыточность.
В случае КСА это влечет за собой увеличение числа линий связи
в СПКИ, усложнение запоминающего и сортировочного устройств. Кро­
ме того, с увеличением обнаруживающей способности кода обычно
усложняются алгоритм функционирования и с: ема устройства обнару­
жения отказов, которая должна, выявлять "запрещенные" кодовые ком­
бинации и обеспечивать адресование неопознанных изделий в допол­
нительный отсек автомата. В связи с этим во избежание излишнего
усложнения КСА в них целесообразно применять лишь коды с невысо­
кой обнаруживающей способностью, такие, как, например, коды с
постоянным весом ( коди" У изМ ") и кода с контролем на четность.
89
Коды с постоянным весом - это двоичные коды, у которых ком­
бинации имеют W
Confit
*
-разрядов, заполненных V=COnf>t - единицами
и W~V ~ нулями. В процессе проктирования КСА все комбинации этих
кодов можно сформировать путем сдвига единиц из "производящей"
комбинации вида
■
. I3I2I1 Ow-v . . . ОгО/.
При сдвиге необходимо соблюдать следующие правила:
1) каждая последующая искомая комбинация образуется из преды­
дущей сдвигом единиц вправо;
2) единовременный сдвиг единиц по п.1 возможен только на
один разряд;
3) формирование комбинации начинается со сдвига 1<;
4) после того, как в результате сдвига 1х,.. ТгI/ , при
X =1,2,..., V - I, происходит замена Ох ... OzOi на In.. . Izh,
следует произвести сдвиг Ix+(,Ix ...Izh , предварительно выпол­
нив сдвиг lx.. .Izh влево, так, чтобы между 1х и Iхи не содер­
жалось нулей;
5) если при выполнении п.4 не происходит замена *Ох
<Ох..
,0z0i
па Iwlx ... Ill 1
, то при следующем сдвиге принимается X = I.
Пус гь, например, требуется осуществить перебор комбинаций ко­
да 3 из 6. Сформируем производящую комбинацию 1з!г1t 0зОг 01.
Согласно п. 1,2,3, из нее можно получить комбинации IjIzOjIiOzOi ,
hlzOiOzhOi ,1зЬ0з0г0/Л. Далее в соответствии с п. 1,2,4 в последней
комбинации правая единица сдвигается на три позиции влево, а затем
вместе с соседней единицей - на одну позицию вправо. Получится ком­
бинация
IsOxItliOzOt .
По п. 1,2,5 из нее можно сфор­
мировать комбинации IsOxlzOzhOi > 1з0з1г0г0<1< .
После этого по п. 1,2,4 нетрудно получить кодовую комбинацию 1з0з
OzlzliOiа из нее по п. 1,2,5 - комбинацию 1з0з0гItOiIi
и так до тех пор, пока не будет сформирована комбинация O3QzO1I3lt.I1
На основании сформулированных правил с помощью алгоритмического
языка ЯЛС [э] можно составить операторную формулу алгоритма перебо­
ра комбинаций кода "V из W
з
MoQi Зг _/ Q з J Qu 3 5 Рб LAiPsF Qg FoML НЯн ,
(5.5)
где Но - оператор начала перебора; Qi - оператор формирования про­
on
изводящей комбинации; Зг - оператор внесения производящей комбина­
ции в стандартную ячеку;
- оператор формирования Х=/
опе­
ратор сдвига Ix...hlf вправо; 3 s - оператор засылки кодовой ком­
бинации в стандартную ячейку; Ре - оператор проверки замены 0х...010<
на Ь ... I г!' ;Ду - оператор вычисления X , при котором произош­
ла замена Ох...ОгО< на Jx—Izlt ; Pi - оператор проверки равен­
ства V и X , вычисленного при Л 7 ; Qi - оператор сдвига 1х..Jtl/вле­
во; Fto(X) - оператор увеличения X на I; Я и - оператор окончания
перебора.
Коды " И из V" дают возможность обнаруживать все оди: очные
ошибки (искажение одного символа в кодовой комбинации) и однотип­
ные двойные, тройные и тому подобные ошибки (искажения нескольких
символов, не являющиеся "смещениями" единиц). Поскольку такие ошиб­
ки являются наиболее распространенными, то обнаруживающая способ­
ность рассматриваемых кодов довольно значите ьна. При
$
(- вероятность искажения символа $ в кодовой комбинации) отно­
шение вероятностей необнаруживаемой и обнаруживаемой ошибок у них,
как показано в [б01 , равно
д__________i____________ _
W,
что, например, при ^,= 0,00/; IV =7
Однако информационная избыточность
?i
v/
W ]/s3
1
(5.6)
составляет
.
(5/7)
IV
у чих оказывается существенной (для кода с IVs 7 и Vя 3 она, в част­
ности, составляет 26%). Если такая избыточность неприемлема (на­
пример в автоматах, у которых сортировочные устройства строятся
на базе суммирующих кодовых исполнительных механизмов
то
вместо кодов с постоянным весом целесообразно использовать коды с
контролем на четность.
Коды с контролем на четность - это двоичные коды, у которых
при IV=Const
V принимает все четные значения. Избыточность
таких кодов равна J =
, а отношение вероятностей необнаруживаемых и обнаруживаемых ошибок равно
о_
’
91
(5.8)
что при
- 0,001 и W = 7 дает J = 0,14 и 0® jggg. Коды с кон­
тролем по четности обнаруживают все одиночные ошибки, поскольку
они превращают четные V в нечетные. При формировании таких кодов
вполне можно использовать алгоритм перебора комбинаций кода " У из
W ". последовательно изменяя У . При необходимости их можно также
использовать в сочетании со статистическим кодированием, рассмот­
ренным в предыдущем параграфе.5.4.
Кодирование оптимальными взвешенными кодами
Рассмотренные методы кодирования обладают общностью, достаточ­
ной для их применения в автоматах различных типов. Вместе с тем
можно отыскать методы, применимые в автоматах конкретных типов, в
частности.с конкретными разновидностями сортировочных устройств.
Как видно из выражения (5.1), характеризующего технологическую
надежность СПКИ, одним из путей уменьшения вероятности ложного ад­
ресования проконтролированных изделий может являться сокредение
величины i - времени, необходимого для направления изделия
сортировочным устройство! в тот или иной сортировочный отсек. Ра­
нее отмечалось, что
I иti
tt ,
*
где It - время, затрачиваемое на переход устройства из некоторого
предыдущего состояния в требуемое; it - время движения изделия через
устройство к отсеку. Величина
по существу, представляет собой вре­
мя срабатывания сортирово лого устройства при поступлении на него
кодовой комбинации от ЗУ и характеризует его быстродействие. В соответс'вии с этим можно полагать, что, повышая быстродействие сор­
тировочного устройства, можно повысить и технологическую надежность
СПКИХ.
х Технологическую надежность СПКИ можно повысить путем сокраще­
ния ti , однако методы, направленные на это, здесь не рассматри­
ваются, поскольку они известны. К ним относятся, например, ме­
тод "подталкивания" .зделия струей сжатого воздуха, применение
лотков скорейшего отпуска, имеющих профиль близкий к циклоиде
[?] и др.
92
Как известно [l?, 20, 2l] , одним из распространенных видов
сортировочных устройств являются устройства с поворотным лотком,
привод которого представляет собой суммирующий механизм - после­
довательно соединенные электромагниты или пневмоцилиндры с длина­
ми ходов, пропорциональными весовым коэффициентам двоичного кода.
Быстродействие таких устройств в значительное мере определяется
выбором весовых коэффициентов. Так, если в устройстве использован
естественный Двоичный код, т.е. взвешенный код с весовыми коэффи­
циентами Ki-21
, где i = 0,1,2,.. ,,W~1 , то минимальные габари­
ты и максимальное быстродействие устройства будут обеспечены лишь
в случае, когда N
2
*
(N- число сортировочных отсеков, 1л/ - число
разрядов кода, управляющего устройством, и число электромагнитов
или пневмоцилиндров привода). Если же A/<2'v
, то естественный
двоичный код применять нерационально , поскольку максимальное
быстродействие и минимальные габариты он в данном случае не обес­
печивает.
Рассмотрим в связи с изложенным вопрос о построении оптималь­
ного взвешенного кода, или что то же самое, вопрос о выборе опти­
мальных весовых коэффициентов двоичного кода, управляющего сорти­
ровочным устройством с суммирующим приводом при Л/< 21’ . Выразим
для это, о угол поворота лотка, обеспечиваемый устройством при по­
даче на его вход некоторой двоичной кодовой комбинации как
1 -/
= d-LCiKi ,
(5.^)
i»0
i=o
где Ci - двоичная переменная, обратная цифре, стоящей в L -ом раз­
ряде кодовой комбинации, подаваемой на вход суммирующего механиз­
ма; di - угол поворота лотка, обеспечиваемый включением I -го элек­
тромагнита или пневмоцилиндра; d. - угол поворота лотка между со­
седними сортировочными отсеками; К; - весовой коэффициент L -го
разряда кода, управляющего сортировочным устройством.
Очевидно, что в том случае, когда Ci~1 при L-0,1,2 .. .,V/-1
W-1
f>=fin>ax =d£,Ki .
(5.10)
• Чем меньше jSmax , те” меньше габариты и время. срабатывания уст­
ройства, поэтому
93
для минимизации указанных величин при заданных /V и d , необходимо минимизировать у
. Совершенно ясно, что
Г ы-<
- V/-1
X.Ki~N4 ,
У'К1 = тч1,
если
(5.II)
м
IV’
.
Здесь ]Х[ - минимальное число, не меньшее X . Поэтому дл.я реше­
ния поставленной задачи требуется выбрать Ki , удовлетворяющее
(Ь.П). Поскольку быстродействие сортировочного устройства лимити­
руется временем, необходимым для обработки наибольшего из di=dKi,
при этом следует также обеспечить минимум наибольшего Ki.
Анализ возможных решений сформулированной задачи с помощью
теории разбиений позволяет указать простой способ выбора весовых
коэффициентов Ki , состоящий в следующем:
1) по заданному А/ вычисляется величина WBjlogiML ;
2) вычисляются Ki=2‘при 1 = 0,1,.., IV-3 ;
3) вычисляется величина Г =
Ki~1;
4) по величине Г вычисляются
Kw-i И Kw-t.
Последнее осуществляется по следующему правилу: если Г>21'м,
то Kw-г принимается равным 2
* 1 , а
- равным
если
, то Kw-г
и Xw-fпринимаются равными Г/2 в случае четных
Г , или
и №■+ { в случае нечетных Г .
Если на основании сформудированных правил составить оператор­
ную формулу расчета весовых коэффициентов (она может потребовать­
ся при автоматизированном проектировании КСА), то эта формула бу­
дет выглядеть таким образом:
JI Ач 3s Fs(l■ )AiP&l<- АзЗюАиРи Г PuLA^^
г
-^З/з0!6$hL JA иЗнАга Зг/1—IA иЗгзАгч 3; - J Я26 .
4 2
4з
4
IPoA 15г
(5.12)
Здесь Wo- оператор начала расчета; А/ - оператор вычисленияW ;
3? - оператор вынесения W в стандартную ячейку; Оз - оператор
формирования 1 = 0 ; Ач - оператор вычисления
; 3s -оператор
вынесения Ki в стандартные ячейки; Fe(i)- оператор увеличения L на.
I; А? - оператор вычисления IV-X ; Pi - оператор проверки равен­
ства L nW-2; Аз - оператор вычисления Г ; 3/0 - оператор вы­
94
несения Г в стандартную ячейку; Ан - оператор вычисления
Piz - оператор проверки Г>£ц,'<; Рн - оператор проверки четнос­
ти f ; Ащ- оператор вычисления
5 3>!5 - оператор выне­
сения Kw-z в стандартную ячейку; Qi6 - оператор формирования
Kw-i^Kw-z
; 3 it - оператор вынесения
в стандартную
ячейку; A is - оператор вычисления
3iS - оператор
засылки К w-t в стандартную ячейку; А и- оператор вычисления Kw-i~ опеРатоР засылки Kw-i в стандартную ячейку; Эго­
оператор вычисления Kw-г ~ 2.
' г ; Згз - оператор вынесения Kw-z в
*
стандартную ячейку;
- оператор вычисления A'h/-/=T-2w‘2 ; Згб оператор занесения К w-t в стандартную ячейку; Pzs - оператор
окончания вычислений.
5.5.
Групповое кодирование
Подобно кодированию оптимальными взвешенными кодами, позволя­
ющему повысить быстродействие поворотных сортировочных устройств
г приводом, работающим по принципу суммирования, групповое кодиро­
вание дает возможность повысить быстр; ’.ействие аналогичных устрой­
ств, работающих по принципу сравнения [l9]. Как правило, элементом,
ограничивающим быстродействие
таких устройств,является дисковая
кодовая шкала, входящая в преобразователь угла поворота лотка сор­
тировочного устройства в код. Шка^а содержит несколько кодовых до­
рожек, взаимодействующих с радиально установленными элементами
считывания кода. Дорожки располагаются концентрично, что влечет за
собой увеличение массы диска и его момента инерции. Значительная
величина последнего и является фактором, снижающим быстродействие
устройства. Если вместо многодорожечной кодовой шкалы применить
’однодорожечную [l4, 15, 4и], то массу и момент инерции диска можно
уменьшить в 2-4 раза. Для построения однодорожечных кодовых шкал
и предназначено групповое кодирование.
В основу группового кодирования положено разбиение полного
множества комбинаций реализуемого кода на группы Qx , образован­
ные циклическим сдвигом некоторых базовых комбинаций Гх. , таких,
что
Гкё@2 г . . .
95
'Fx^Qx-i
eQx.\
r*
(5.13)
В общем случае, при блочности кода, равной 1л/ , группы содер­
жат по W/di -комбинаций ( di - всякий делитель W), причем число
групп, содержащих в точностиtv/Лкомбинаций равно
<5-н>
где F(dx) - число возможных комбинаций длиной W[dx , образованных
по тем же принципам, что и комбинации реализуемого кода; dy - дели­
тели W , кратные/Ух ; Му - число групп, содержащих в точности
W/dyкомбинаций. Если/Ух =/ , то группы являются полными (содержат
в точности W комбинации) и число таких групп
(5.i5)
d
где d - всякий делитель IV , не противоречащий закону образования
1~х , a jU(d) - функция Мебиуса.
При групповом кодировании можно строить однодорожечные кодо­
вые шкалы, реализующие
N=WMp
(5.16)
кодовых комбинаций, входящих в полные группы, при условии, что Мр
.- целое число, не превышающее Мп [is]. Выполнять построение
целесообразно по следующим правилам:
I) полное множество комбинаций кода, который должен быть вос­
произведен на диске, разбивается на групгы, образованные цикличес­
ким сдвигом базовых комбинаций;
L) выбирается Мр=-гт полных групп (содержащих по W комбина­
ций. ;
3) выбираются базовые комбинации этих групп и записываются
друг за другом;
4) на кодируемом диске выделяется кольцевая зона (дорожка)
и делится на Л/ равных секторов;
5) члены последовательности, составленной из избранных базо­
вых комбинаций (эту последовательность называют базовым комплексам),,
с помощью изолирующих и токопроводящих участков (или иным способом)
воспроизводятся в секторах кольца; при этом в порядке расположения
комбинаций в базовом комплексе вначале воспроизводятся первые эле­
менты базовых комбинаций, затем вторые и т.д.
96
Пусть, например, требуется построить однодорожечную кодовую
шкалу, реализующую 12 комбинаций двоичного кода с IV“ V . Разобьем
для этого полное множество комбинаций кода с
на группы: 0001,
0010, 0100, 1000; ООП, 0П0, 1100, х001; ОШ, ШО, II0I, ЮН;
0101, 1010; Ш1; 0000. Выберем далее три полные группы и сформи­
руем из их базовых комбинаций базовый комплекс ((0001, ООП, ОШ))
Полагая, что единицы воспроизводятся токопроводящими участками
диска, а нули - изолирующими, найдем расположение этих участков
на диске: 0СЭ00ЮПШ. Если теперь вокруг кодового диска с ин­
тервалом
расположить щетки, то при вращении диска на 'уходах
щеток будут формироваться кодовые комбинации, входящие з выбран­
ные группы.
Таким образом, групповое кодирование позволяет реализовать
требуемые кодовые комбинации одной кольцевой дорожкой, в то время
как обычные методы дают возможность строить диски только с IV до­
рожками .
В процессе применения группового кодирования можно использо­
вать и ЭВМ. При этом программу построения шкал нетрудно составить
с помощью опер-торной формулы 3
(5.17)
ЗнАиРцР Ff5(>J)Pi6LFп (x)L Jfl<g,
6
Ч
f ?
где Do - оператор начала счета; Bl - обобщенный оператор формиро­
вания полного множества комбинаций реализуемого кода; Bt - обобщен­
ный оператор разбиения реализуемого кода на группы;
- оператор
формирования /-/ ; В 4 - оператор выбора L -ой группы; Ps- опс атор
проверки равенства числа комбинаций в I -ой группе и числа IV ;
Зб - оператор засылки базовых комбинаций в стандартные ячейки;
А?- оператор счета числа базовых комбинаций, внесенных в стандар­
тные ячейки; Рг - оператор проверки равенства числа, подсчитанного
оператором А? , и числа Мр ; Fs(l) - опеоатор увеличения i на I;
QfO - оператор формирования
; Вн ~ обобщенный опера­
тор выбора X -ого символа из У -ой базовой кодовой комбинации,
внесенной в стандартные ячейки; За - оператор занесения в стан­
дартную ячейку X -ого символа У -ой базовой комбинации; А<3 - опе­
ратор счета символов, выбранных оператором Bff ; Рщ - оператор
проверки равенства числа символов, выбранных оператором Вн, и чис-
97
ла N ; Fis(y)- оператор увеличения У на I; Pi6 - оператор провер­
ки равенства У и Мр
*1
; Fitfy) - оператор увеличения К на I и фор­
мирования У=/ ;
- оператор окончания вычислений.
Следует отметить, что для повышения технологичности диска,
построенного методом группового кодирования, целесообразно базо­
вый комплекс выбрать так, чтобы при воспроизведении его на диске
получилось минимальное число сплошных серий нулей и единиц. Это
легко обеспечить принимая во внимание, что общее число таких се­
рий
М
Pi ,
(5.18)
где
- расстояния Хемминга между смежными комбинаци­
ями базового комплекса, aJ)m - то же между последней комбинацией
базового комплекса и комбинацией, полученной из первой однократ­
ным циклическим сдвигом (соотношение для L справедливо в случае
кодов с основанием
). Если при построении диска принять
j)(aJh ■ • •
/ , то одновременно с повышением технологичнос­
ти диска можно получить и однопеременный код, позволяющий избе­
жать ошибок считывания кода с диска. При необходимости групповое
кодирование дает возможность реализовать и коды с обнаружением
ошибок - код с постоянным весом, с контролем на четность и др.
[15, 4b],
Методы повышения технологической надежности КСА, рассмотрен­
ные в гл. 3~4, являются расчетно-аналитическими и практически не .
требуют введения в КСА специальной аппаратуры [is]. Вместе с тем
последняя также дает возможность повысить технологическую надеж­
ность КСА. Специальная аппаратура может оказаться полезной при
первоначальной настройке и поднастройке контрольного устройства
КСА, для управления параметрами КСА, обеспечивающими адаптацию ав­
томата к изменяющимся условиям его эксплуатации и т.д. В связи с
этим в заключительной главе представляется целесообразным рассмот­
реть некоторые аппаратурные методы повышения технологической надеяи
ности КСА, основанные на применении систем автоподнастройки и адата
тации.
Глава 6.
6.1.
ПОВЫШЕНИЕ ТЕХНОЛОГИЧЕСКОЙ НАДЕЖНОСТИ
АВТОМАТА ПУТЕМ ПРИМЕНЕНИЯ СИСТЕМ
АВТОПОДНАСТРОЙКИ И АДАПТАЦИИ
Критерии настроенности автомата
Как уже отмечалось в гл. 4, в процессе эксплуатации автомата
возможны изменения значений
и Al , характеризующих настройку
контрольного устройства КСА. Эти изменения приводят к увеличению
вероятности ложного адресования изделий, контролируемых автоматом,
и должны быть учтены при первоначальной настройке КСА путем введе­
ния поправок
*
^on = ~{!&dt
и Aldon = -T$Airft,
(6.1)
х
0
_ 0 _
где Д и Al - интенсивности изменения 4 и Ai ; tп - интервал
времени между поднастройками контрольного устройства. Чем меньше
tn , тем меньше пределы колебаний Д и Ai при работе автомата и
тем выше его технологическая надежность. Однако, производя под­
настройку вручную, обеспечить малые tn без значительного снижения
производительности труда на контрольно-сортировочных операциях
практически невозможно. Применение же систем автоподнастройки поз­
воляет сократить tn и повысить технологическую надежность КСА почти
без потерь производительности труда.
В основу работы систем автоподнастройки КСА положена проверка
настроенности измерительного преобразователя и квантователей, входящих
в контрольное устройство КСА, по различным статистическим критериям.
Критерием Настроенности измерительного преобразователя служит ве­
личина
П
f
АХо ~'п]а(Хо1~Хо),
.
(6.2)
где Хо - требуемое значение начала отсчета преобразователя; Xoi~
фактическое значение
начала отсчета, полученное при I -ом
из П измерений. Величина АХопредставляет собой среднее смещение
фактического начала отсчета от требуемого и определяется либо пу­
тем П -кратного измерения изделия, у которого значение контроли­
руемого параметра равно нулю (эталонного изделия), либоЛ-кратной
постановкой измерительного преобразователя на арретир (жесткий
99
упор и т.п.). Зная ЛХо , путем регулировки настроечных жментов
преобразователя сводят смещение начала отсчета к тому или иному
заданному значению.
Критериями настроенности квантователей служат величины 7),/? и К.
Первая из них называется статис ическим критерием знаков, а вто­
рая и третья - критериями числа и длины серий. При использовании
этих критериев на квантователь И раз подают эталонный сигнал уров­
ня, равного требуемому порогу срабатывания. При каждой подаче эта­
лонного сигнал возможно срабатывание квантователя и появление на
его выходе единичного сигнала или несрабатывание, что эквивалент­
но нулевому сигналу. Совокупность
единичных и Пг нулевых сигна­
лов образуют тестовую последовательность. Если квантователь наст­
роен на требуемый порог достаточно точно, то появление нулей и
единиц в тестовой последовательности равновероятно, а числа П< и nt
отличаются отп/1 лишь в результате воздействия случайных факторов.
Если же настройка смещена, то фактические числа нулей и единиц в
тестовой последовательности отличаются от
неслучайно.
В настоящее время, как правило, проверку тестовой последова­
тельности на случайность отклонения /7< и Hi otnli производят с помощью
двухстороннего непараметрического критерия знаков [22, 45]. По это­
му кри герию определяют наименьшее число Г) из чисел
и Hi и сравни­
вают его с критическим.
Распределение П при П> 90 принято считать нормальным со сред­
ним
и дисперсией б’йг(М+/)/2 . В связи с этим вероятность то.го, что П не превышает Пк/> с учетом дискретности распределения
равна
,
(6 3)
где
- нормированная пункция нормального распределения.
Задавая уровень значимости ot и учитывая, что критерий знаков име­
ет двухстороннюю критическую область, с помощью (6.3) Пкр опре­
деляют как
и ~ п~< *
7 WW
Гу_ —,
(6Л)
где
- квантиль нормированного нормального распределения. Из-за
дискретности распределения критическим считают ближайшее целое число
ICC
содержащееся в (6.4). ПосколькуР
, то тестовая пос­
ледовательность считается случайной, а квантователь - настроенном
достаточно точно, если й>гг
/>
*
. Достоинством критерия знаков
является простота его применения и аппаратурной реализации. Одна­
ко у него есть существенный недостаток. Так, чтобы квантователь
можно было считать настроенным достаточно точно и пригодным к эк­
сплуатации, необходимо, чтобы нули и единицы в тестовой последова­
тельности появлялись не только с равной вероятностью, но и незави­
симо друг от друга. Позволяя проверить первое, критерий знаков
не позволяет определить второе.
Указанного недостатка лишены односторонние непараметрические
критерии числа и длины серий. Если критерии числа и у чины серии
применять при проверке настройки квантователей, то можно легко
выявить случаи, когда нули и единицы, входящие в тестовую последо­
вательность, полученную при проверке квантователя, не являются не­
зависимыми, что и» ет место, например, при склонности и залипанию
контактов в электроноконтактных квантователях, при смещениях нас­
тройки порога срабатывания квантователей в процессе проверки из-за
отсутствия или неисправности фиксаторов настройки и т.г..
При использовании критериев фисла и длины серий во всякой
тестовой последовательности серией считают совокупности следующих
друг за .другом одинаковых сигналов. Число сигналов, входящих в се­
рию, называют длиной серии.
Распределение общего числа серии Р пти
п > 20 приближенно
нормально сс средним
» (п * г)/2 и дисперсией
[45].
Считая вероятность Р-££
*
Rxpj
равной уровню значимости оС
,
где R кр
- критическое число серий, с учетом дискретности R
из
(й51
*f> можно найти, как
R
’
R кр -
(6.6)
где Z сб так же;как и
- квантиль нормированного нормального
распределения. Вычисляя А’хуэпо (6.6) с округлением результата в
меньшую сторону, тестовую последовательность можно считать случай­
ной, если R > Ккр ■
101
Распределение числа серий Як длины К и Оолее при К > о
подчиняется закону Пуассона со средним и дисперсией П/2
*
[4б].
Отсюда следует вероятность появления одной серии Длины равной или
больше К
Л.
Р{Рк»<} = 1-е
.
*?)
(в.
Из выражения (6.7) можно найти такое К , вероятность превзой­
ти которое как угодно мала, например, равна d :
J2
(6.8)
Решая (6.8) относительно К и принимая результат за Ккр,будем иметь
р [
П
1
к _
(6.9)
1пг
Вычисляя Ккр и округляя его подобно Икр в меньшую сторону, тестовую
последовательность можно считать случайной, если К<Ккр.
Несмотря на отмеченные выше достоинства критериев числа и
длины серии по сравнению с критерием знаков, применять эти крите­
рии при проверке настройки квантователей целесообразно лишь при ус­
ловии, что эти критерии обеспечивают большую эффективность провер­
ки, чем критерий знаков. Как известно [40], для сравнения эффективно­
сти применения тех или иных критериев использую функцию мощности
критерия, которая определяется при сравнении нулевой и альтернатив­
ной гипотез. Применительно к рассматриваемой задаче нулевая гипоте­
за состоит в том, что при случайной тестовой последовательности
фактическое среднее^ используемого критерия равняется его матема­
тическому ожиданиюjWo , а альтернативная гипотеза - в том, что
среднее существенно (более чем на некоторую величину) отличает­
ся от математического ожидания.
Учитывая, что критерии знаков, числа и длины серий при усло­
виях, рассмотренных ранее, распределены нормально, на основании
центральной предельной теоремы теории вероятностей распределения
средних значений^/ этих критериев можно считать также нормальным
со средними JUo и дисперсиями б’Уи . где б* 4 - дисперсии критериев.
102
Тогда вводя параметр 2=-^^ , нормирующий распределение JU ,
для класса альтернативных гипотез JUtjtfo
рия знаков можно записать
4 Цбп//п1
г]
IT
функцию мощности крите­
L т
'/гйТ J
Vrw J
Поскольку критерий числа серий используется, когда класс альтер­
нативных гипотез подчиняется условиюJU^o, функцию мощности в
этом случае представим в виде
а=■
(6Л1)
Выражения (6.10) и (6.II) получены без всяких промежуточных пре­
образований, так как величины 6п и 6 ц , входящие в них, извест­
ны. Для получения, же функции мощности критерия длины серий необ­
ходимо предварительно найти среднее квадратическое отклонение 6к
этого критерия. Для отыскания 6к используем нормальное приближе­
ние к закону Пуассона и выразим Кир как
Ккр
Так как для закона Пуассона бк-Л/к
.
(6.12)
, то (6.12) эквивалентно
6к +1 1-а,6к~ Ккр “ 0.
(6.13)
Подставляя Ккр из (6.9) и решая (6.13) относительной, будем
иметь
П
£nfr/f-oO
(6.14)
In 2
Используя найденное^ и принимая во внимание, что критерий длины
функцию мощности этого критерия
серий работает в области
JU
представим как
{.бк/чП
J
Для оценки эффективности критериев знаков, числа и длины
серии было проведено расчетно-аналитическое исследование выражений
(6.10), (6.II) и (6.15) с последующим сравнением результатов на
графиках.
На рис. 6.1, а с точностью дос{ показаны графики Tin,Як,Як
в ’зависимости от числа испытаний Л при
/ и уровнях значи­
мости ci = 0,01; 0,05; 0,1, а на рис. 6.1,6 также с точностью до
d “
■ в зависимости от П при
= 0,5;-1,0;
1,5 и d = 0,05. Из этих графиков видно, что при одинаковых П,
IjU'flol и d наибольшую мощность имеет критерий длины серий, за­
тем критерий числа серий и наименьшую - критерий знаков.
Рис. 6.1.
Зависи ость мощности критериев от длины тестовой пос­
ледовательности при d = 0,01; 0,05; 0,1 и альтернатив­
ной гипотезе jjU-JUol = / (а) и при d = 0,05 и альтер­
нативных гипотезах /Д#/= 0,5; 1,0; 1,5$;— ■ крите­
рий знаков,---------критерий числа серий, ------- критерий
длины серий
На рис. 6.2 приведены зависимости функций мощности критери­
ев от разности
при П = 50 и
d = 0,05. Из рисунка вид­
но, что для случая
у критерия числа серий функция мощ
ности больше, чем у критерия знаков, а у критерия длины серий меньше. Когда JU>JUo , то у критерия длины серий функция мощности
больше, чем у к; 1терия знаков, а у критерия числа серий - меньше.
104
Рис. 6.2.
Зависимость функции мощности критериев от
альтернативной гипотезы при длине тестовой
последовательности П = 50 .и уровне значимости
критериев 0,05; ------- — критерий знаков,
------- критерий числа серий, ----------- критерий
длины серий
Это с учетом графиков, приведенных на рис. 6.1, показывает, что
При совместном применении критерии числа и длины серий более эффек­
тивны, чем критерий знаков.
6.2.
Автоматические анализаторы настройки
. квантователей
Главными узлами систем автоподнастройки, работающих с ис­
пользованием рассмотренных критериев, являются автоматические ана­
лизаторы настройки измерительного преобразователя и квантователей.
Не останавливаясь на первые достаточно подробно описанных в лите­
ратуре [19], рассмотрим далее лишь анализаторы настройки квантова­
телей. Наиболее простыми являются анализаторы^ работающие с ис­
пользованием критерия знаков (рис. 6.3). Они содержат два электри­
ческих блока: блок - I - распределитель единичных и нулевых вход­
ных сигналов - и блок Л - счетно-аналитический. Блок I собран из
трех логических элементов - одного инвертора I й двух элементов
"И" 2,6, а блок ТТ - из двух счетчиков 3,5 и одного элемента "И"
4.
'105
f
Рис. 6.3.
2
С
3
4
Анализатор, работающий с использованием
критерия знаков (тип I)
Для проверки настроенности квантователя вход А анализатора
подключают к выходу квантователя, а вход В - к командоаппарату
автомата. При каждом измерении эталонного изделия квантователь вы­
дает сигнал "О" или "I", а командоаппарат выдает сопровождающие их
тактовые импульсы "I". При подаче сигнала "О" на вход инвертора I
на его выходе появляется сигнал ”1" и наоборот; при приходе на
вход сигнала "I" на выходе появляется "О". Если на выходы элемен­
тов "И" 2,6. подается по два сигнала "I", то на их выходах также
появляется "I", в остальных же случаях на них будет "О". Такая ло­
гика работы элементов распределителя заставляет каждый сигнал "I",
поступающий на вход А и сопровождаемый тактовым импульсом, пере­
даваться в счетчик 5 и подсчитываться им, а каждый сигнал "О" в счетчик 3 и также подсчитываться. В счетчики через входы С вводят­
ся числа, ограничивающие их емкость. Эти числа принимаются равными
Пир . Если количество импульсов, накопленное в счетчике 5, превы­
сит Пкр , а в счетчике 3 - не превысит, то на входе " - " блока
ц появится сигнал, означающий, что настройка квантователя смеще­
на в меньшую сторону. Если аналогичный сигнал появится на выходе
" + ", это означает, что настройка смещена в большую сторону. Ес­
ли сигналы появятся одновременно на выходах " - " и " + ", то ло­
гический элемент "И" 4 выдаст сигнал на вход "О", означающий, что
настройку квантователя можно считать несмещенной,
Простота анализаторов, работающих с использованием критерия
знаков (назовем их анализаторами первого типа), является их сущес­
твенным достоинством. Однако в силу меньшей эффективности критерия
знаков, чем критериев числа и длины серий, достоверность анализа
настройки квантователей с их помощью существенно меньше, чем дос­
106
товерность анализа с помощью аналогичных устройств, но работаю­
щих с применением критериев числа и длины серий.
Анализаторы, работающие с использованием критериев числа и
длины серий, могут быть двух разновидностей - с вводом допустимых
значений/?<р и Ккр вручную (работающие по фиксированным /Ц» и Ккр ) и
с автоматическим выбором этих значений (анализе-'оры второго и тре­
тьего типов, соответственно).
Схема анализаторов с вводом Ккр к Ккр вручную показана на рис.
6.4. Она включает в себя распределитель I единичных и нулевых
входных сигналов, выходы которого соединены со входами счетчиков
2 и 10, связанных с выходом анализатора через запоминающие тригге­
ры 3 и 4, счетчик 7, соединенный с выходом устройства через запо­
минающий триггер 6, триггеры 12 и 13, разноименные входы которых
соединены с выходами распределителя I, а выходы через одновибрато­
ры 9,11 и логическую схему "ИЛИ" 8 связаны с выходом счетчика 7,
а также шины, соединяющие вход счетчика 10 с каналом сброса счет­
чика 2, вход счетчика 2 с каналом сброса счетчика 10, и выходы
триггеров 3,4,6 со схемой "ИЛИ” 5.
Рис. 6.4.
Анализатор, работающий с использованием критериев
числа и длины серий, с вводом допустимых критериев
вручную (тип 2)
При использовании анализатора вначале по выбранному Л опре­
деляют значения Ritp и Ккр. Затем через входы С вводят Ккр в счет­
чики 2 и 10, а через вход Д-Ккр в счетчик 7, ограничивая тем са­
мым емкость указанных счетчиков. После этого к входу А распредели107
теля I подключают настраиваемый квантователь и производят измере­
ния соответствующего эталонного изделия, сопровождая каждое изме­
рение подачей тактового импульса на вход В распределителя I.
Перед началом работы элементы схемы находятся в состояниях,
показанных на рисунке. При подаче входного сигнала на вход А и
тактового импульса на вход В распределитель I направляет входной
сигнал, если это единица,- в счетчик 2 и подает импульс на сброс
счетчика 10. Если входным сигналом является ноль, то распредели­
тель I направляет его в счетчик 10 и подает импульс на сброс счет­
чика 2. О' човременно с этим импульсом поступающие в счетчик 2 и
10 подаются также на триггеры 12 и 13. При подаче первого импуль­
са некоторой серии, например, соответствующей единичным входным
сигналам, триггер 12 перебрасывается и на вход одновибратора 10
подается сигнал "I". В то же время триггер 13 устанавливается в
состояние; когда на вход одновибратора II подается "0". Подача
второго и последующего импульсов этой же серии на триггеры 12 и
13 их состояние не изменяет. Если же на триггеры подается первый
импульс некоторой серии, соответствующей нулевым входным сигналам,
то триггеры 12,13 срабатывают наоборот - триггер 13 подает на вход
одновибратора II сигнал "I", а триггер 12 подает на вход одновибра­
тора II сигнал "0". Подача второго и последующего импульсов из этой
же серии состояние триггеров 12 и 13 не меняет.
Появление сигналов "I" на входах одновибраторов 9 или II со­
провождается появлением одиночных импульсов на их выходах (при по­
явлении сигналов "0" на входах одновибраторы импульсы не выдают).
Эти импульсы через схему "ИЛИ" 8 подаются в счетчик 7. Таким обра-'
зом, при появлении каждой серии нулей или единиц в последователь­
ности сигналов, формируемых проверяемым пороговым элементов, на
вход счетчика 7 поступает импульс. В результате, счетчики 2 и 10
подсчитывают длину каждой серии, а счетчик 7 - число серий. Если
счетчики в ходе проверки не переполнились, на их выходах сигналы
равны нулю, на выходах триггеров 3 и 4 - также равны нулю, на выхо­
де триггера 6 сигнал равен единице, и на выходе схемы "ИЛИ"5 - так­
же равен единице. Если число серий превышает допустимое значение,
а длина серий - нет, то на выходе схемы 5 сигнал исчезает, что сви­
детельствует о правильной настройке и работе квантователя. Если
длина серий превышает допустимое значение, либо число серий их не
превышает, то сигнал на выходе схемы 5 сохраняется и квантователь
настроен неверно.
108
Можно полагать, что настройка смещена в положительную сторо­
ну при переполнении счетчика 2 и в отрицательную при переполнении
счётчика 10.
Вводя критические значения числа и длины серий в анализатор
вручную, их удобно определять по формулам (6.6) и (6.12). Но эти
формулы справедливы лишь при П/хПг . Чем больше разница между
Hi и Иг , тем больше погрешность вычисления Икр и Ккр. В.связи с
этим для повышения достоверности проверки настроенности и работо­
способности квантователей иногда целесообразно использовать анали­
затор, работающий по критериям числа и длины серий совместно с aiaлизатором, работающим по критерию знаков. Если анализатор, работа­
ющий по критерию знаков, выдаст сигнал о том, что квантователь на­
строен верно, то далее следует провести проверку по критерию чис­
ла и длины серии. Если же при проверке по критерию знаков окажет­
ся, что квантозатель настроен неверно, то проверку по критериям чи­
сла и длины серий производить не требуется. Во избежание примене­
ния двух анализаторов для повышения достоверности проверки можно
использовать и анализаторы с автоматическим выбросом допустимых
значений ккр и Ккр .
Схема анализатора с автоматическим выбором Икр и Ккр (рис.6.5)
содержит распределитель I единичных и нулевых входных сигналов,
вход А которого соединен со входом двоичного счетчика 2, а выходы
с триггерами 3 и 4, связанными через одновибраторы 5 и 6 и схему
"ИЛИ" 7, со счетчиком 8; счетчики 9 и 10, входы которых через эле­
менты "И" II и 12 и элемент задержки 13 соединены со входом распредилителя; преобразователи двоичного кода 14 и 15, связанные че­
рез ключ 16 с кодовым выходом счетчика 2 и со схемами сравнения ко­
дов 17, 18 и 19 (другие входы этих схем сравнения соединены с ко­
довыми выходами счетчиков 8, 9 и 10); схему сравнения 20, соединен­
ную с кодовыми выходами счетчиков 9 и 10 через Элемент "И" 21 и
инвертор 22 с элементом "И" 23, связанную со сбросами этих счетчи­
ков; триггер 24, элемент "ИЛИ"25 и инвертор 26.Так же,как и в пре­
дыдущем анализаторе, сигналы от проверяемого квантователя подаются
на вход А распределителя, а на вход В поступают тактовые импульсы.
Единичные импульсы, поступающие на вход А, подсчитываются счетчиком
2 и запоминаются в нем. К концу проверки, когда на вход А уже подано
П сигналов от квантователя, в счетчике 2 оказывается записанным чис­
ло
, равное количеству единиц в последовательности из П сигналов.
109
1
Рис. 6.5.
Анализатор с автоматическим выбором допустимых
значений критериев числа и длины серий (тип 3)
Одновременно с подачей сигналов на входы распределителя счет­
чик 5 подсчитывает в последовательности из И сигналов количество
серий нулей и единиц. Это осуществляется faff же, как и в ранее рас­
смотренном анализаторе с помощью устройств 3,4,5,6,7.
Если триггер 24 находится в состоянии, показанном на рисунке,
то тактовые импульсы с входа В распределителя проходят в счетчик 9
и накапливаются в нем до тех пор, пока триггер не перебросится.
Если триггер 24 находится в противоположном состоянии, то импуль­
сы накапливаются в счетчике 10. Переброс триггера 24 происходит по
команде от элементов 21 и 23. Последние же выдают сигнал в том слу­
чае, когда поступает импульс в счетчик 6, причем команда появляет­
ся на выходе элемента 21 и 23 в зависимости от того, нулевой или
единичный сигнал существует на выходе схемы сравнения 20. Но этот
сигнал будет нулевым, если в счетчике 9 записано двоичное число,
превышающее или равное числу, записанному в счетчике 10. В связи с
этим, при подаче-каждого импульса в счетчик 8 будет происходить
сброс того из счетчиков 9 или 10, в котором содержится меньшее чис-
П0
to, а триггер будет направлять тактовые импульсы в очищенный счет­
чик. В результате после анализа всей последовательности из И вход­
ных сигналов, формируемых проверяемым квантователем, либо в счет­
чике 9, либо в счетчике 10 окажется число, равное наибольшей дли­
не серии единичных или нулевых сигналов в рассматриваемой последо­
вательности.
Если после окончания всех описанных процессов нажать ключ 16,
то двоичное число, записанное в счетчике 2, поступит на входы пре­
образователей 14 и 15. В зависимости от того, какое это число,
преобразователи либо выдадут сигнал о неправильной отрицательно
или положительно смещенной настройке квантователя (это будет в том
случае, когда указанное число меньше или равно Пкр или больше или
равноП-Пкр), либо сформируют двоичные комбинации, представляющие
собой кодированные значения/?^ и Ккр , соответствующие полученным
при проверке величинам И) и Иг. (при разработке анализатора их можно
найти по формуле
/?хр *
^7п-1гп<Пг-(6.16)
и по статистическим таблицам [45]). Эти значения поступят на схемы
сравнения 17, 18 и 19 ивызовут на выходе элемента 25 исчезновение
сигнала, если Я^Якр или К^Ккр . В противном случае сигнал не ис­
чезнет, что свидетельствует о неправильной настройке и работе кван­
тователя. Если сигнал исчезнет, квантователь настроен правильно.
Как уже отмечалось выше, описанные анализаторы настройки кван­
тователей являются основными узлами систем автоподнастройки, при­
чем использоваться они могут по-разному. Остановимся поэтому далее
на возможных схемах включения анализаторов и принципах построения
систем с их применением.
6.3.
Принципы построения систем автоподнастройки
квантователей
Как правило, любая система автоподнастройки квантователей
строится на базе следующих блоков: анализатора настройки квантова­
телей (первого, второго или третьего типа), корректора настройки
(реверсивного двухвходового шагового механизма с эл,ектроуправлением или ему подобного устройства [l9]), блоков согласования анали­
III
затора и корректора, ключевых схем, счетчиков импульсов, а также
специальны., блоков. В простейшем случае такая система содержит
один анализатор и выглядит, как показано на рис. 6.6, где I - ана­
лизатор, 2 - блок согласования, 3 - корректор, 4 - счетчик, работа­
ющий на переполнение; 5 - ключевая схема.
При работе системы тестовая пос­
ледовательность импульсов подается
на вход Д и через ключевую схему
поступает на соответствующий вход ■ -•
анализатора. Сопровождающие (такто­
вые) импульсы подаются на входВ и
далее на вход счетчика импутьсов
и также на анализатор. После пос­
тупления п импульсов на вход счет­
Рис. 6.6. Система автопод­
чика
последний переполняется и за­
настройки с од­
крывает
ключевую схему. Одновремен­
ним анализатором
но с этим он подает сигнал на сра­
батывание блока согласования, кото­
рый производит считывание информации с выходов анализатора и пода­
ет импульс на тот или иной вход корректора настройки квантователя.
В зависимости от того, на какой из входов корректора поступил им­
пульс, производится поднастройка квантователя в ту или иную сторо­
ну.
Рассмотренная система может быть реализована на анализаторах
любого типа. При этом блок согласования выполняется по одной из
схем, показанных на рис. 6.7, а остальные блоки - по любым общеиз­
вестным схемам.
Остановимся далее на системе поднастройки с двумя анализато­
рами (рис. 6.8).
В такой системе, как уже отмечалось ранее, применяются анализа­
торы первого и второго типа и обеспечивается более высокая достовер'
ность проверки настроенности квантователей.Так же,как и в предыду­
щей системе, в ней имеется ключевая схема I, счетчик импульсов 8
и корректор 7, однако, в связи с использованием двух анализаторов
2 (второго типа) и 3 (первого типа), в ней содержится еще блок рас­
пределения команд4идва блока согласования 5иб.При подаче тестовой
последовательности на вход А и сопровождающих импульсов на вход В
импульсы поступают на анализаторы 2 и 3 и на счетчик 8. Когда счет-
112
От триггера.^
От преоЬразавателя
От преоЬразоОателл f5
От элемента „Или"25
От счетчика
Рис. 6.7.
Схемы блоков согласования для анализаторов
типа 1(a), 2(6) и 3(e)
ИЗ
чик переполняется (это происходит после счета Л импульсов), он по­
дает сигнал на закрытие ключевой схемы и на срабатывание блока рас>пределения команд. Схема блока распределения команд аналогична
схеме распределителя единичных и нулевых входных сигналов, приме­
няемого в анализаторах. При этом логика его работы такова: если
по окончании работы анализатора 3 от него поступает сигнал по кана­
лу "О", то при поступлении сигнала переполнения от счетчика 8 блок
распределения 4 выдаст команду блоку согласования 5 на считывание
информации е выходов анализатора 2 и передаче ее в корректор 7;
если Же ст анализатора 3 по каналу "О" сигнал на блок 4 не посту­
пает, то по сигналу переполнения счетчика 8 выходной сигнал блока
4 включит блок согласования 6, передающий на корректор 7 информа­
цию с выхода анализатора 3. Таким образом оказывается, что после
проверки настройки квантователя по критерию знаков в случае обнару­
жения искажения первоначальной настройки коррекция настройки произ­
водится
сразу. Если же указанное искажение при проверке по кри­
терию знаков не обнаружилось, то коррекция производится по резуль­
татам дополнительной проверки по критериям числа и длины серий.
Рис. 6.8.
Система автоподнастройки с двумя анализаторами
Если в рассмотренной системе применить двухрежимный корректор,
обеспечивающий поднастройку большими импульсами при работе от бло­
ка согласования 6 и малыми при работе от блока согласования 5, то
можно повысить точность и производительность поднастройки кванто­
вателей. Однако еще большего повышения производительности поднастрсйки можно достичь применением систем, построенных по схеме, изо114
браженной на рис. 6.9. Эта схема, подобно предыдущей,может быть
построена на двухрежимном корректоре, но отличие ее состоит в том,
что она работает не с постоянным, а с переменным И . Это позволя­
ет при больших смещениях настройки производить не Г) проверок, а
меньше, столько, сколько минимально необходимо для обнаружения
смещения.
Рис. 6.9.
Система автоподнастройки, работающая с исполь­
зованием тестовой последовательности перемен­
ной длины
Основными блоками данной схемы, общими с ранее рассмотрен­
ными, являются: анализатор 2, корректор 7, счетчик 10, блоки сог­
ласования 3 и 4 и ключевая схема I. Тем не менее в ней имеются и •
дополнительные блоки: кодопреобразователи 8 и 9, подключенные к
кодовым выходам счетчика 10, делитель 5 числа импульсов, выполня­
ющий функции декоррелятора, и счетно-аналитический блок 5, анало­
гичный применяемому в анализаторах, работающих по критерию знаков.
Работа системы происходит следующим образом. При подаче вход­
ных импульсов по каналам А и В ключевая схема I пропускает их в
анализатор 2 и на счетчик 10. Последний в соответствии с текущим
( i-ым) входным импульсом выдает двоично-кодированное число
,
которое преобразователем 9 преобразуется в критические значения
критериев, по которым работает анализатор, соответствующее тесто-
115
бой последовательности длиной И; . В зависимости от результатов ана­
лиза последовательности длиной I'll , блок согласования 4 пропустит
от анализатора 2 на делитель 5 импульс,соответствующий коррекции
настройки квантователя либо в " + ", либо в " - ", либо в " 0 ",
что означает невозможность определения направления смещения на­
стройки. Отсутствие импульса при этом означает и отсутствие смеще­
ния настройки.
Если делитель имеет коэффициент деления j , то каждый j -ый
из поступивших на него импульсов он будет передавать в счетно-ана­
литический блок 6. Указанный блок (рис. 6.10) содержит три счетчи­
ка импульсов 1,2 и 3, которые суммируют результаты каждой j -ой
проверки.. При этом счетчик I определяет, сколько раз из j циклов
настройка квантователя была призна­
на смещенной в " - " счетчик 2 сколько раз настройка была признана
смещенной в " + ", а счетчик 3 сколько раз направление смещения
настройки определить не удалось. Ем­
кость счетчиков переменна и ограничи­
вается вводимыми в них от кодопреоб­
разователя 8 (см. рис. 6.9) числами
К ключевой
Ввод критериев
• гдеИГф- критическое
схеме
значение критерия знаков, соответст­
Рис. 6.10. Схема счетновующее тестовой последовательности
длины Hi/j. В связи с этим, при доста­
-аналитического блока
точно больших числах импульсов, пос­
тупивших от делителя импульсов на
(зтчики 1,2 или 3 счетно-аналитИческого блока, какой-либо из счет­
чиков пеоеполнится и выдает соответствующий сигнал на корректор
настройки квантователя или на блокировку автомата. При этом входная
ключевая схема системы выключится и подача импульсов в анализатор
прекратится. Если в процессе Л циклов работы системы не произойдет
переполнения ни одного из счетчиков счетно-аналитического блока, то
выключение ключевой схемы произойдет по сигналу переполнения счетчи­
ка 10 (рис. 6.9). На корректор в данном случае сигнал может быть
подан через дополнительный блок согласования 3. Таким образом, под­
настройка квантователя по фиксированному /1 происходит лишь тогда,
когда смещения настройки малы. При значительных смещениях она про­
изводится по переменному П .
116
Системы аатоподиаатройки кмнтомтвлай а оиматаиии и «йотами
ми автоподнаотройки ивмяритвльного преобрааоаиТаля оба инами шют
повышение твхнологичвокой нядпжнооти контрольного уотройотви КСА.
Что касается повышения технологической надежности С1И<И, то его мож
но достичь применением систем оптимального регулирования производи
тельности автомата.
6.4.
Оптимальное регулирование производительности
автомата
Оптимальное регулирование производительности КСА проще всего
обеспечить с помощью показателя (2.46), который после подстановки
(2.23) принимает вид
(6 р')
r
s xpli.-t-h)
W
■
Совершенно ясно, что при увеличении Тр правый сомножитель
- (обозначим его А ( Т/> )) в соотношении(4.17) увеличивается,
а левый -S2-(F (Тр )) уменьшается, что влечет за собой изменение
величины
Поскольку увеличение А(Тр ) и уменьшение F (Тр ) в
общем случае неодинаковы, то, очевидно, существует оптимальное Тр,
обеспечивающее при постоянстве остальных величин, входящих в (6.17)
минимум " £ ". Отыскать оптимальное Тр нетрудно. Для этого целесо­
образно аппроксимировать А (Тр) функцией R (Тр) , непрерывной в ди­
апазоне допустимых значений Тр , а затем из условия
^^ = Я(Тр)-О^+Я(Тр)-Ц^ = 0
ОТр
г о Гр
г
0)р
(6.18)
найти Тр , обеспечивающее min б . Если такой подход получить анали­
тическое решение не позволяет, то можно использовать известные ите­
рационные алгоритмы. Во всяком случае, оптимальное Тр определимо
практически всегда.
Ясно, что при различных значениях величин, входящих в (6.17)
и, в частности, при различных р(г) и p(it), определяемых законом
распределения контролируемого параметра и меняющихся в процессе эк­
сплуатации КСА, значения оптимальныхТр будут также, различны. В свя­
117
зи с этим, для поддержания вероятности ложного адресования сорти­
руемых 'зделий на уровне минимума " f) " производительность КСА
при работе, а следовательно и Тр , необходимо регулировать в соот­
ветствии с изменениями распределения параметра, контролируемого
КСА. Осуществить такое регулирование можно с помощью системы адап­
тации, блок-схема которой приведена на рис. 6.II.
г
Рис. 6.II.
з
Блок-схема системы адаптации КСА
Система должна содержать: блок 2 определения закона распреде­
ления контролируемого параметра, который должен быть связан с вы­
ходами контрольного устройства КСА I, блок 3 вычисления оптималь­
ных Тр и регулятор 4 величины Тр , который должен быть соединен
с приводом распределительного вала автомата I или с другим устрой­
ством управления циклом.
Реализация описанной системы довольно сложна, однако ее можно
упростить, если смоделировать возможные изменения закона распреде­
ления контролируемого параметра. В этом случае значения оптималь­
ных Тр , соответствующих различным законам распределения, можно
просчитать заранее и блок 3 превратится в обычный кодопреобразова­
тель, на вход которого подается вход, описывающий тот или иной за­
кон распределения, а с выхода снимается кодированное значение тре­
буемого Тр .
Пример системы, построенной по описанному принципу, показан
на рис. 6.12. Система содержит дешифратор I, входы которого под­
ключаются к выходам контрольного устройства автомата 8, а выходы
через ключевую систему, собранную на логических элементах "И" 2,
соединены с двоичными счетчиками 3. Устройства 1.3 совместно с ло­
гической схемой "ИЛИ" 12, счетчиком II и инвертором 13 представля­
ют собой блок определения закона распределения контролируемого па-
118
Рис. 6.12.
Пример схемной реализации системы
адаптации КСА
раметра. Кодовые выходы счетчиков 3 через кодопреобразователь 4,
еще одну ключевую схему, собранную на логических элементах "И"5,
соединяются далее с запоминающими триггерами 6. Устройства 5-6 сов­
местно с одновибратором 9 и преобразователем "код - напряжение" 7,
подклйченным к триггерам б, и привод постоянного тока распредели­
тельного вала автомата В образует регулятор производительности ав­
томата.
Кодопреобразователь 4 для обеспечения требуемой работы строит­
ся следующим’ образом: задаются одним из возможных законов распреде­
ления контролируемого параметра и при определенном числе испытаний
Л и заданном числе интервалов сортировки<рассчитывают частоты П< ,
Гк , Пз
попадания значений этого параметра во все интервалы;
каждую частоту кодируют равномерным естественным двоичным кодом,и
119
все кодовые комбинации записывают в одну строку, получая тем самым
набор Д ну. эй и единиц; по заданному закону распределения контроли­
руемого параметра вычисляет оптимальную длительность рабочего цикла
автомата; рассчитывают величину напряжения, которое, будучи подано
на электродвигатель распределительного вала обеспечит вычисленную
длительность цикла; кодируют величину напряжения двоичным кодом
и получают некоторый набор В ; задаваясь другими возможными закона­
ми распределения контролируемого параметра, аналогично получают ■
другие наборы А и В ; после этого строят таблицу соответствия, а
по ней кодопреобразователь, у которого каждому входному набору А
соответствует определенный выходной набор В .
При каждом цикле работы автомата 8 на одном из выходов дешиф­
ратора I появляется импульс, который при непереполненном счетчике
II проходит в один из счетчиков 3 и через схему "ИЛИ" 12 - в счет­
чик II. С выходов счетчиков 3 информация поступает на входы кодо­
преобразователя 4. Дальше ее не пропускает вторая ключевая схема.
В триггерах 6 запомнена некоторая предыдущая информация. Так проис­
ходит в течение П циклов. После этого счетчик II переполняется, на
его выходе появляется сигнал "I" (до этого был "О") на выходе инвер­
тора 13 появляется "О" и элементы "И"2 перестают пропускать импуль­
сы в счетчики 3. В данный момент на выходах счетчиков 3 имеется на­
бор А , один из тех, которые соответствуют определенному закону
распределения контролируемого параметра. Одновременно с этим сигнал
переполнения счетчика II заставляет элементы "И"5 пропустить от
кодопреобразователя 4 к триггерам 6 кодовый набор В , являющийся
результатом преобразования набора А . Импульс, поступающий от счет­
чика II через одновибратор 9, стирает из- триггеров 6 предыдущую ин­
формацию. После этого кодовый набор В ,. поданный на триггеры 6, по­
ступает от них на преобразователь 7 двоичного кода в напряжение, а
последнее поступает на электропривод автомата 8.
Скорость вращения последнего изменяется и производительность
автомата.меняется в соответствии с изменением закона распределения
контролируемого параметра. Через определенные интервалы времени командоаппарат или реле времени 10, соединенное с шинами сброса счет­
чиков 3 и II, вернет эти счетчики в исходное состояние и регулиро­
вание производительности произойдет в соответствии с новым законом
распределения контролируемого параметра. Вероятность ложного адре­
120
сования при этом все время будет оставаться минимальной.
Системы адаптации, подобные рассмотренной, могут служить эф­
фективным средством повышения технологической надежности КСА. Тем
не менее наряду с ними целесообразно применять и системы других
типов. Из них, по-видимому, наиболее перспективны системы активной
виброзащиты контрольно-сортировочных автоматог поскольку именно
вибрации являются наиболее распространенной причиной искажения на­
стройки контрольных устройств КСА и увеличения числа сбоев в сис­
темах переработки контрольной информации.
6.5.
Активная виброзащита автоматов
Для снижения вибрации КСА принципиально пригодны два пути ак­
тивной виброзащиты - активная виброизоляция и активное виброгашение,
однако первый путь, позволяя почти полностью ликвидировать влияние
на КСА внешних вибраций, мало эффективен при подавлении вибраций,
возникающих внутри автомата. Между тем именно последние представ­
ляют для КСА наибольшую опасность, так как подобного рода автоматы
обычно устанавливают в специальных помещениях, куда внешние вибра­
ции практически не проникают. Учитывая это, остановимся далее лишь
на активном виброгашении.
В основу активного виброгашения
удобно положить регулирова­
ние частоты собственных колебаний виброгасителя
'
(6.19)
где
- жесткость, ГП - масса, Р - сила тяжести, Хет - статичес­
кая осадка виброгасителя, а
- ускорение свободного падения [б2].
Если <fc изменять аналогично частоте /i вынужденных колебаний,
возникающих внутри автомата (fg при работе КСА обычно меняется в
широком диапазоне), то виброгаситель все время будет работать в
резонансном режиме, что и обеспечит активное виброгашение.
Регулирование fa возможно двумя способами - изменением Хоти
Виброгаситель, работающий с изменением Хет , показан на рис. 6.13,
Он содержит шток I, закрепленную перпендикулярно на его оси мембра­
ну 3, груз 4, неподвижно установленный на мембране 3 электромагнит
2, также неподвижно закрепленный на штоке I над грузом 4, и датчик
J2.I
8 частоты fl
, который через функциональный преобразователь -
усилитель 7 и сумматор напряжений 6
тромагнитом.
Рис. 6.13.
электрически соединен с элек­
Вйброгаситель с автоматическим регулированием
статической осадки груза
Шток I вворачивается в вибрирующий элемент 5 автомата. Под
действием вибрации датчик 8 генерирует напряжение, пропорциональ­
ное fl , и электромагнит 2, противодействуя силе тяжести груза 4,
обеспечивает определенную величину Хет - статической осадки груза
на мембране. В соответствии с (6.19) частота собственных колебаний
fc груза на мембране принимает значение
и вынужденные ко­
лебания гасятся.
Предварительно настраивая виброгаситель путем подачи напряже­
ния смещения на клемму А , можно обеспечить его работоспособность
в диапазоне ft от нескольких герц до десятков килогерц. Однако,
несмотря на это,он применим далеко не всегда, поскольку пригоден
только для гашения вертикальных колебаний. Виброгасители же, ра­
ботающие с изменением If этого недостатка лишены, что можно пока­
зать на примере, приведенном на рис. 6.14.
Виброгаситель на рис. 6.14 включает в себя корпус I, на кото­
ром закреплены датчик fl 12 и пневмоцилиндр 3; упругую мембрану 8
с присоединенными к ней грузом II; усилитель 10 сигнала датчика 12,
электроуправляемый редуктор давления. Мембрана 8 закреплена с одно­
го конца (правого) непосредственно к корпусу I, а с другого конца
(левого) - через кронштейн 2. Шток 4 пневмоцилиндра снабжен окном
5 для прохода кронштейна и пазом 6, расположенным в осевой плоскос­
ти штока. Сквозь паз 6 (на рисунке для наглядности паз оказан ут­
122
рировано, в действительности он на 0,2-0,3 мм больше толщины мем­
браны) пропущена мембрана 8. Поршень цилиндра 3 подпружинен спира­
льной пружиной 7. Давление в цилиндр подается через редуктор 9, уп­
равляющий вход которого через усилитель 10 соединен с датчиком 12.
Рис. 6.14.
Виброгаситель с автоматическим регулированием
жесткости
При установившейся частоте вынужденных колебаний ft корпуса
I виброгасителя, устанавливаемого на вибрирующем узле КСА, груз II
колеблется на мембране 8 с собственной частотой fc » близкой к ft
(для этого виброгаситель следует устанавливать так, чтобы направле­
ние вынужденных колебаний было перпендикулярно плоскости мембраны).
Датчик частоты 12 выдает определенный сигнал, который, проходя через
усилитель 10 и редуктор 9, обеспечивает определенное давление в ци­
линдре. Поршень и шток 9 цилиндра занимают определенное положение,
обеспечивающее определенную жесткость
мембраны. Если частота ft
возрастет, то по сигналу датчика 12 редуктор 9 увеличит давление
в цилиндре.,Поршень переместится вправо и займет новое положение,
что приведет к увеличению жесткости мембраны. Аналогично уменьше­
ние ft
приводит к уменьшению жесткости. Но согласно (6.19), умень­
шение или увеличение жесткости
приводит к соответствующему умень.шению или увеличению fc , поэтому виброгаситель, однажды настроен­
ный в резонанс,будет все время такое состояние сохранять.
123
ЛИТЕРАТУРА
1. Ацюковский В.А. Емкостные преобразователи перемещения.
М.; Энергия, 1966.
2. Бежанов Б.Н., Бушунов В.Т. Производственные машины автоматы. Л.: Машиностроение, 1973.
3. ' Болотин И.М., Павленко В.А. Пороговые устройства для
приборов автоматического контроля и регулирования. М.: Энергия,
1970.
4. Браславский Д.А., Петров В.В. Точность измерительных
устройств. М.: Машиностроение, 1976,
5. Капур К., Ламберсон Л. Надежность и проектирование сис­
тем. М.: Мир, I960.
6. Конюхов И.Е. Электромеханические функциональные преобра­
зователи. М.: Машиностроение, 1977.
7. Корн Г., Корн Т. Справочник для научных работников и ин­
женеров. М..- Наука, 1970.
8. Краснов М.Л., Макаренко Г.И., Киселев А.И. Вариационное
исчисление. М.: Наука, 1973.
9. Криницкий Н.А., Миронов Г.А., Фролов Г.Д. Программирова­
ние. М.: Наука, 1966.
10. Купершмидт Я.А. Точность телеизмерений . И.: Энергия,
1978.
11. Кувшинский В.В. Автоматизация технологических процессов
в машиностроении. М.: Машиностроение, 1972.
12. Левин Б.Р. Теоретические основы статистической радиотех­
ники. T.I. М.: Советское радио, 1969.
13. Либерман Я.Л. Повышение точностной надежности датчика
- классификатора путем оптимизации характеристики его измеритель­
ного преобразователя по чувствительности // Стандартизация и из­
мерительная техника. Красноярск', 1978. Вып. 4.
14. Либерман Я.Л, Приложение одной комбинаторной задачи к
кодированию угла // Автометрия. 1972. № 2.
15. Либерман Я.Л. Новый метод синтеза однодорожечных кодовых
шкал для преобразователей угол-код // Изв. вузов. Электромехани­
ка. 1975. № 2.
16. Либерман Я.Л. Управление законом распределения вероятнос­
тей контролируемого параметра как способ повышения ка ества сор­
тировки // Управление качеством в механосборочном производстве.
Пермь, 1979.
124
17. Либерман Я.Л. Устройство для сортировки деталей: Авт;
свид. СССР № 373129, БИ № 14, 1973.
13. Либерман ЯЛ,, Либерман Л.Х., Храмцов С.И. Об'оптимальной
настройке пороговых элементов датчиков - классификаторов // Адап­
тация, моделирование и диагностика систем. Тольятти, 1980.
19? Либерман Я.Л., Кувшинский В.В. Контрольно-сортировочные
автоматы.. М.: Машиностроение, 1983.
20. Либерман Я.Л., Пыкин Ю.А. К расчету поворотного сорти­
ровочного механизма с суммирующим кодовым приводом // Изв. ву­
зов. Машиностроение. 1975. № 10.
21. Либерман Я.Л., Пыкин Ю.А., Гусев О.А. Исследование про­
изводительности поворотного сортировочного механизма // Изв.
вузов. Машиностроение. 1977. №> 9.
22. Либерман Я.Л., Храмцов С.И. Эффективность критериев
проверки настройки пороговых преобразователей // Измерительная
техника. 1981. №> 10.
23. Либерман Я.Л., Храмцов С.И. Об оценке надежности системы
переработки измерительной информации в автоматах для многодиапа­
зонной сортировки // Изв. вузов. Приборостроение. 1978. № 2.
24. Либерман Я.Л., Храмцов С.И. О выборе характеристики из­
мерительного преобразователя повышенной чувствительности // Мет­
рология. 1978. № 6.
25. Либерман Я.Л., Храмцов С.И. Выбор оптимальной характери­
стики измерительного преобразователя // Изв. вузов. Электромеха­
ника. 1981. № 6.
26. Либерман Я.Л.,Храмцов С.И., Гусев Л.А. Методы повышения
технологической надежности контрольно-сортировочных автоматов //
Автоматизация технологических процессов в машиностроении. Свер­
дловск, 1977. Вып.1.
27. Либерман Я.Л., Храмцов С.И., Либерман Л.Х. Об оценке
точностной надежности датчиков - классификаторов // Стандарти­
зация и измерительная техника. Красноярск, 1973. Вып.4.
28. Мандельбат М.М. Реостатные преобразователи перемещения.
М.: Энергия, 1966.
29. Марков Н.Н.,Машинистов В.М., Этингоф Н.И. Электроконтактные датчики для линейных измерений. М.: Машиностроение, 1969.
30. Новик Д.А. Эффективное кодировани-е М.; Л,- Энергия,
1965.
125
31. Новицкий П.В. Основы информационной теории измерительных
устройств. Л.: Энергия, 1968.
32. Новицкий П.В., Назаров И.А., Иванова В.Я. Сравнение,оценок
погрешностей измерения // Измерительная техника. 1966. № 9.
33. Ольштейн Я.А. Надежность автоматов для контроля линейных
размеров. М.: Машиностроение, 1979.
34. Пульер Ю.М., Колесов Ю.А., Асиновский Ж.Н. Индукционные
электромеханические функциональные преобразователи. М.: Энергия,
1969.
35. Пятин Ю.М. Проектирование элементов измерительных прибо­
ров. М.: Высшая школа, 1977.
36. Рыжик Н.М., Градштейн Н.С. Таблицы интегралов суг.л, ря­
дов и произведений. М.: Гостехиздат, 1951.
37. Селлерс Ф. Методы обнаружения ошибок в работе ЭЦВМ. М.:
Мир, 1972.
38. Соловьев В.Ф. Рациональное кодирование при передаче сооб­
щений. М.: Энергия, 1970.
39., Сорочкин Б.М., Богданов Э.О. Автоматизация многопозицион­
ной сортировки. Л.: Машиностроение, 1973.
40. Смирнов Н.В., Дунин-Барковский И.В. Курс теории вероят­
ностей и математической статистики для технических приложений
М.: Наука, 1969,
41. Темников Ф.Е. Автоматические регистрирующие приборы.
М.: Машгиз, I960.
’
42. Троицкий В.А. Электромеханические функциональные преобра­
зователи // Электротехника. 1963. № 12.
43. Туричин А.М., Новицкий П.В. и др. Электрические измерения
неэлектрических величин. Л.: Энергия, 1975.
44. Фихтенгольц Р.М. Курс дифференциального исчисления. В 3 т.
М.: Наука, 1970.
45. Хальд А. Математическая статистика с техническими приложе­
ниями. М.: Изд-во иностр.лит., 1956.
46. Хетагуров Я.А., Руднев Ю.П. Повышение надежности цифровых
устройств методами избыточного кодирования. М.: Энергия, 1974.
47. Цейтлин Я.М., Сорочкин Б.М. и др. Фотоэлектрические авто­
маты для контроля размеров. Л.: Машиностроение. 1969.
4<з. Шарин Ю.С..Либерман Я.Л., Анахов Б.Я. Комбинаторные шка­
лы в системах автоматики. М.: Энергия, 1973.
126
49. Шаумян Г.А. Комплексная автоматизация производственных
процессов. М.: Машиностроение, 1973.
50. Шляпоберский В.И. Основы техники передачи дискретных
сообщений. М.: Связь, 1973.
51. Шраго Л.К. Разработка и исследование кодовых датчиков
положения для автоматизации металлорежущих станков. Дис. ... канд.
техн. наук. Моск, станкоинстр. ин-т. 1968.
52. Юдин Е.Я., Баратов А.Н. и др. Охрана труда в машиностро­
ении. М.: Машиностроение, 1976.
ОГЛАВЛЕНИЕ
ВВВДЕНИЕ.................................................................................................................. а
Глава I. Контрольно-сортировочный автомат и роль
надежности в повышении его качества
1.1. Принципы контроля и структура
контрольно-сортировочного автомата
как системы управления ..........................................
5
1.2. Производительность, коэффициент полезного
действия и обобщенный показатель качества
контрольно-сортировочного автомата......................... 9
1.3. Категории надежности контрольно­
сортировочного автомата и их влияние
на обобщенный показатель качества ........................
Глава 2. Общие положения, связанные с повышением
технологической надежности контрольноЗОртйровочного автомата
2.1. Функциональная схема и некоторые особен­
ности работы контрольно-сортировочного
автомата ..............................................................................2Q?
2.2.
Глава 3.
Статистическое описание погрешностей
и сбоев, определяющих технологическую
надежность автомата ................................................... 22,
2.3. Показатели технологической надежности
контрольного устройства автомата ........................ 29
2.4. Показатели технологической надежности
системы переработки контрольной
информации ......................................................
22
Повышение технологической надежности контроль­
ного устройства путем оптимизации номинальной
характеристики измерительного преобразователя
3.1. Формулировка и обобщенное решение
задачи .................................................................................
3.2. Произвольное распределение аддитивной пог­
решности 4 при отсутствии мультипликатив­
ной погрешности V ...................................................... 42
3.3. Нормальное распределение аддитивной и
мультипликативной погрешностей 4 и V .............. ^5
128
3.4.
Равномерное распределение аддитивной
и мультипликативной погрешностей
Д и V ..................
Равномерное распределение аддитивной и
нормальное распределение мультиплика­
тивной погрешностей Д и 7...................
50
3.6. Арксинусоидальное распределение аддитивной
и нормальное, распределение мультипликатив­
ной погрешностей Д и 7 ................... ...;........................ §3
3.7. Дискретное двузначное распределение
аддитивной и произвольное непрерывное
распределение мультипликативной погреш­
ностей Д и 7......................................................................
Повышение технологической надежности контрольного
устройства с помощью управления законом распределения
контролируемого параметра и оптимизации настройки
элементов
4.1. Общий подход к повышению надежности с
помощью управления р(Х); управление р(Х)
. взамен оптимизации W(X)........................................
.фЗ
4.2. Управление р(х) совместно с оптимизацией
при неограниченной дисперсии
контролируемого параметра................................................ <$,
4.3. Управление р(Х) совместно с оптимизацией
^(Х)и в случае ограниченной дисперсии
контролируемого параметра .............................................. 66'
4.4. Оптимизация настройки квантователей на
номинальные пороги срабатывания
................. . 7$,
4.5. Оптимизация смещения Al настройки кван­
тователей относительно номинальных поро­
гов срабатывания
........... ......................................
4.6. Оптимизация смещения Д настройки начала
отсчета измерительного преобразователя
относительно нуля ...................................... ...................... 62.
Повышение технологической надежности системы
переработки контрольной информации за счет рациональ­
ного кодирования
5.1. Рациональное кодирование, как способ
повышения надежности .........................................................^6
3.5.
Глава 4.
Глава 5.
129
5.2.
5.3.
5.4.
5."5.
Статистическое кодирование ....................................... 86
Применение кодов, обнаруживающих
ошибки ...................
89
Кодирование оптимальными взвешенными
кодами ...............................................................................
Групповое кодирование ............................................... 95
Повышение технологической надежности автомата
Путем применения систем автоподнастройки и
адаптации
6.1. Критерии настроенности автомата ............. ...........
6.2. Автоматические анализаторы настройки
квантователей..................................................................
6.3. Принципы построения системы автопод­
настройки квантователей ........ ....................
6.4. Оптимальное регулирование производитель­
ности автомата ..............................................................
6.5. Активная виброзащита автомата ..............................
ЛИТЕРАТУРА .................
134
Глава 6.
130
Научное издание
Либерман Яков Львович
Повышение технологической надежности
контрольно-сортировочных автоматов
Корректор Т.С.Валек
ИБ № 543
Подписано в печать 02.10.90.
Формат 60x84/16
Бумага типографская № 3. Усл.печ.л. 7,7. Усл.кр.-отт. 7,93.
Уч. изд.л. 6,7. ТиракТ490 экз. Заказ 1338
Цена 40 к.
Издательство Уральского университета
620219, г.Свердловск, ГСП-830, просп. Ленина, 136
Цех № 4 производственного отделения "Полиграфист"
Свердловск, ул. Тургенева, 20.