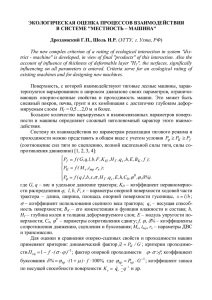
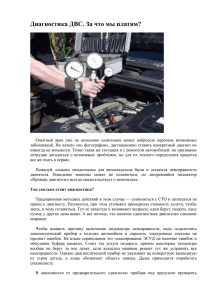
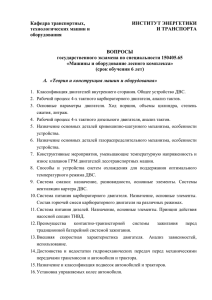
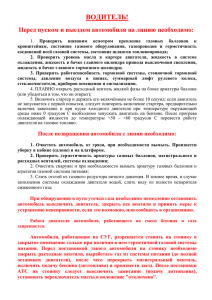
4. ТЯГОВО-ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЛЕСНЫХ МАШИН 4.1. Тяговая характеристика автомобиля Тяговой характеристикой называется зависимость свободной силы на ободе колеса Pa от скорости движения машины Va : (4.1) Pa f (Va ) . Свободная сила тяги Pa определяется как Pa Pk Pw , (4.2) где Pk – касательная сила тяги; Pw – сила сопротивления воздушной среды. Сила тяги зависит от передаточного числа трансмиссии (передаточного числа коробки передач, раздаточной коробки и ведущего моста). Поэтому на тяговой характеристике наносится ряд кривых, соответствующих передаточному числу трансмиссии на каждой из передач. Общий вид графика тяговой характеристики приведен на рис. 4. Из внешней скоростной характеристики определяется значение крутящего момента для каждого значения частоты вращения коленчатого вала. Момент, подводимый к ведущим колесам, определится из выражения (4.3) M к M e i тр тр . Касательная сила тяги на ведущих органах колесных машин составит M e i тр тр M Pk к . (4.4) Rк Rк Сила сопротивления воздушной среды Pw определится из уравнения (при скорости в км/ч) Pw K w F Va2 , 13 (4.5) а свободная сила тяги Pa Pk Pw . (4.6) При определении значения касательной силы тяги в таблицу результатов расчетов заносятся значения M к , Pk , Pw , Pa и Va . 44 P a, Н I II III IV Pψ + w Pψ Pw Pψ 0 Va, м/с Vmax Рис. 4. Тяговая характеристика Параметры тяговой характеристики i Iрк n Мк i Iтр * Va * Pк Pw i II рк * i II тр Pa Va Pк Pw i Iтр * Pa Va Pк Pw Pa Параметры тяговой характеристики определяются на всех передачах коробки передач. График тяговой характеристики, дополненный силами внешнего сопротивления, называется графиком тягового баланса. 4.2. Динамическая характеристика автомобиля Использование графика тяговой характеристики в практических целях при сравнении машин с разными весовыми параметрами не всегда удобно, т. к. силы сопротивления движению в одинаковых условиях различны. Сравнение тяговых свойств автомобилей удобнее проводить, используя динамическую характеристику, предложенную академиком 45 Е. А. Чудаковым и представляющую собой графическую зависимость динамического фактора D от скорости движения Va : (4.7) D f ( Va ) , где D – динамический фактор, определяемый свободной силой тяги Pa , отнесенной к полной массе транспортной системы G a . Таким образом, динамический фактор представляет собой свободную силу тяги, приходящуюся на единицу полного веса транспортной системы. Особенно удобно пользоваться динамической характеристикой машины в случае установившегося движения, т. е. при Pj 0 . Тогда (4.8) D f cos sin f cos i ψ, где ψ – коэффициент суммарного дорожного сопротивления. Примерный график динамической характеристики представлен на рис. 5. D Dmax 0.30 0.25 0.20 DI DII DIII 0.15 DIV 0.10 0.05 0 Vmax Va, м/с Рис. 5. Примерный график динамической характеристики автомобиля На практике часто выполняют совмещенную тяговодинамическую характеристику машины с различными масштабами значений Pa и D по оси координат. 46 Значение динамического фактора D так же, как и свободной силы Pa , больше на низших передачах вследствие увеличения касательной силы Pk и уменьшения силы сопротивления воздуха Pw . Средние значения динамического фактора D для различных типов автомобилей приведены в табл. 7. Таблица 7. Значения динамического фактора D для различных типов автомобилей Динамический Тип автомобиля фактор, D Легковые: микролитражные 0,20÷0,25 малого литража 0,25÷0,30 среднего и большого литража 0,35÷0,50 Грузовые: малой грузоподъемности средней и большой грузоподъемности Автопоезда Автомобили высокой проходимости 0,35÷0,45 0,30÷0,40 0,18÷0,25 0,60÷0,80 4.3. Динамическая характеристика с номограммой загрузок Динамическая характеристика строится для 100 % загрузки автопоезда (автомобиля). На практике загрузка может меняться от нулевой (холостой пробег) до 100 %. Для определения динамических качеств машины при частичных загрузках график динамической характеристики дополняется номограммой загрузок. При уменьшении весовой загрузки автопоезда до G x от полной величины G динамический фактор изменится и станет равным P G G Dx a D , (4.9) G Gx Gx где D – динамический фактор при полной загрузке автопоезда (автомобиля). Построение начинается с расчета и выполнения графика динамической характеристики. Далее от начала координат влево по оси абсцисс откладывается в произвольном масштабе отрезок, начало которого принимается за 0 % загрузки и на который наносят шкалу, соответствующую загрузке автопоезда (автомобиля) в процентах – 10, 20 % и т. д. 47 Начало координат динамической характеристики соответствует 100%-й загрузке (рис. 6). D0 D 0.30 DI 0.25 0.35 0.30 0.25 0.20 0.15 0.10 0.05 0.20 0.15 0.10 0.05 0 20 40 60 80 100 Загрузка Н, % DII DIII DIV Vmax Va, м/с Рис. 6. Примерный график динамической характеристики с номограммой загрузки Через точку, соответствующую нулевой загрузке, проводят линию, параллельную оси ординат, и на ней наносят шкалу динамического фактора автопоезда (автомобиля) без груза – D 0 . Масштаб этой шкалы a 0 находится из следующего соотношения: G0 , (4.10) Ga где а – масштаб шкалы для 100%-й загрузки автопоезда; G 0 – вес незагруженного автопоезда (автомобиля). Пример. Масштаб шкалы D a = 10 мм соответствует 0,05 D. Полный вес автомобиля с грузом – G = 153,05 кН. Вес в снаряженном состоянии – G 0 = 70,80 кН. Тогда по формуле (4.10) 70.8 a 0 10 4.62 , 153 .05 т. е. 4,62 мм шкалы D 0 равно 0,05 D 0 . «Круглые» значения (кратные пяти) D 0 и D соединяем прямыми сплошными линиями. Промежуточные значения D определяем интерполированием. a0 a 48 4.4. Динамический паспорт автомобиля Динамическая характеристика с номограммой загрузок позволяет определить возможность движения автомобиля (автопоезда), исходя из условия влияния сопротивления (ψ), конструкции машины ( Pa ) и загрузочного режима. Для полного исследования возможностей движения необходимо учитывать условия сцепления ведущих колес с грунтом. Как известно, условием движения без буксования является состояние (4.11) D D . Для случая равномерного движения при D = ψ можно записать (4.12) D D , где D – динамический фактор по сцеплению. G сц D , Ga (4.13) где G сц – сила веса автомобиля, приходящаяся на ведущие колеса (сцепной вес). Для полноприводной машины G сц G a и D . Для случая 100%-й загрузки автомобиля (автопоезда) на динамической характеристике наносят значения D при различных φ и исследуется возможность движения без буксования, т. е. соблюдения условия D D . При произвольном значении загрузки от 0 до 100 % строится график контроля буксования, совмещенный с номограммой загрузок. Порядок построения графика контроля буксования следующий. Определяется значение D для 100%-й загрузки при нескольких коэффициентах сцепления, начиная с 0,1 (или 0,05), и откладывается на оси ординат по шкале D в масштабе а. Значения D 0 для незагруженного автомобиля определяются по формуле D 0 G 02 , G0 (4.14) где G 02 – вес, приходящийся на ведущую ось порожней машины; G 0 – снаряженный вес автомобиля (автопоезда). 49 Значения D 0 откладываются по шкале D 0 для разных φ, начиная также с φ = 0,1 (или 0,05) в масштабе a 0 . Однозначные динамические факторы на шкалах D100 и D 0 соединяют пунктирными линиями с указанием их фактических величин (φ = 0,1, φ = 0,2 и т. д.). Динамическая характеристика с номограммой загрузок и графиком контроля буксования называется динамическим паспортом автомобиля (рис. 7). D0 0.5 0.4 D DI 0.3 0.5 0.4 0.2 DII 0.3 DIII 0.2 0.1 DIV 0.1 0 20 40 60 80 100 Загрузка Н, % Vmax Va, м/с Рис. 7. Общий вид динамического паспорта автомобиля 4.5. Мощностной баланс Мощностной баланс машины представляет собой распределение эффективной мощности двигателя, потребной для преодоления всех сопротивлений при движении (4.15) N e N тр N f N i N w N j N кр , где N тр , N f , N i , N w , N j , N кр – мощности, затрачиваемые на потери в трансмиссии, преодоление сопротивления качению, подъему, воздушной среды, инерции, крюковой нагрузки. 50 Мощность на ведущих органах автомобиля N к N e N тр тр N e . (4.16) Мощность, затрачиваемая на преодоление сопротивления движению: Pf Va . (4.17) 1000 Мощность, затрачиваемая на преодоление подъема: P V (4.18) Ni i a . 1000 Мощность, затрачиваемая на преодоление сопротивления воздушной среды: Nf K w F Va3 . (4.19) 1000 Мощность, затрачиваемая на крюке: Pкр Va N кр . (4.20) 1000 Мощность, затрачиваемая на преодоление инерции: Pj Va G a Va dVa . (4.21) Nj 1000 1000 g dt Для гусеничных машин следует еще учесть потери в ведущем участке гусеничной цепи (4.22) N к тр г N e . Nw Общий вид графика мощностного баланса автомобиля с четырехступенчатой коробкой передач приведен на рис. 8. Из графика видно, что автомобиль может двигаться устойчиво со скоростью Va только на IV передаче. Пересечение линий N к N w и N f 2 N i 2 в точке С означает, что мощность суммарного сопротивления дороги N 2 при коэффициенте сопротивления качению машины f2, тангенсе угла подъема i2 и скорости Va соответствует развиваемой двигателем мощности N e за вычетом мощности, затрачиваемой на трение в трансмиссии (отрезок ординаты АВ) и на преодоление сопротивления воздуха (отрезок ВС). При значениях f = f1 и i = i1 кривая N 1 проходит ниже и налицо запас мощности (отрезок CD), который может быть использован для разгона машины. 51 Рис. 8. Общий вид графика мощностного баланса автомобиля Значение N e берется из внешней скоростной характеристики, а скорость движения на различных передачах определяется по уравнению: 2 R к n e Va , (4.23) i тр где R к – радиус качения колеса или радиус начальной окружности ведущей звездочки трактора, м; i тр – передаточное число трансмиссии на i-й передаче; n e – номинальная частота вращения коленчатого вала по внешней скоростной характеристике. При изменении i тр меняются скорость и сила тяги машины, а мощности N e и N к (без учета изменения к.п.д. на разных передачах) остаются неизменными. Поэтому определенным значениям частоты вращения коленчатого вала соответствуют одни и те же значения N e и N к , а значения скорости движения Va будут различны. Для I передачи получим 2R к n e 2R к n e n VaI A e . (4.24) i тр i0 iI iI 52 Для последующих передач получим n n VaII A e ; VaIII A e и т. д., i III i II где i I , i II , i III – передаточные числа коробки передач на I, II, III и последующих передачах. В нижней части графика наносится зависимость N f f (Va ) . До скорости 16 м/с зависимость N f прямолинейная, т. к. f = const и определяется для 3–4 произвольных скоростей. При скоростях движения свыше 16 м/с используют эмпирическую зависимость V2 f f 0 1 a , (4.25) 1500 где f 0 – коэффициент качения при скоростях меньше 16 м/с. 4.6. Анализ тягово-динамических свойств автомобиля Возможность движения в конкретных условиях ограничивается мощностью, подводимой к ведущим колесам, и способностью реализовать силу тяги по условиям сцепления ведущих колес, т. е. подчиняется зависимости (4.26) P Pa P . При анализе динамической характеристики условием движения является зависимость вида G сц D . (4.27) Ga Таким образом, для движения на определенной передаче обязательным является выполнение трех условий: 1. Сумма сопротивлений движению Pсопр не превосходит значение силы Pa или ψ D . 2. Сила тяги на ведущих колесах не превосходит силы сцепления P или D (G сц / G a ) . 3. Ускорение движения автомобиля возможно при P Pa , если сила тяги не превосходит силы сцепления Pa P . Для осуществления равномерного движения на конкретной передаче при изменении сил внешних сопротивлений необходимо изменять 53 подачу топлива в соответствии с изменением P , так чтобы выдерживалось соотношение Pa P или D = ψ. Тяговая и динамическая характеристики строятся на основе внешней скоростной характеристики, и поэтому значения Pa или D имеют максимальную величину. В реальных эксплуатационных условиях сила тяги и скорость движения имеют промежуточные значения, и водитель изменением положения дроссельной заслонки или подачи топлива устанавливает соответствие скорости движения и силы тяги. Работа двигателя на режиме внешней скоростной характеристики происходит в условиях интенсивного разгона автомобиля или при очень тяжелых условиях движения. С помощью тяговой и динамической характеристик могут быть решены многие практические задачи, связанные с тягово-эксплуатационными качествами автомобилей. К числу таких определяемых задач можно отнести следующие: – возможность движения на данной передаче в конкретных дорожных условиях; – скорость и время движения; – величина допустимых сопротивлений движению; – предельные значения подъемов для разных дорог; – передача при трогании с места и ускорение движения; – вес автопоезда при движении с заданной скоростью на различных типах дорог; – необходимость включения переднего ведущего моста, блокировки межосевого дифференциала и др. При выполнении курсового проекта обязательным условием при анализе тягово-динамических качеств автомобиля является нанесение на график суммарных сил сопротивления P Pf Pi Pкр для сопр всех трех условий движения и ограничения по сцеплению P для легких и тяжелых условий. 4.7. Методика построения тяговой характеристики гусеничного трелевочного трактора Для трелевочных тракторов тяговые характеристики строят в функции от силы тяги на крюке применительно к установившейся работе на горизонтальном участке. Они показывают, как меняются с изменением силы тяги на крюке следующие показатели: мощность на крюке, скорость поступательного движения трактора, буксование ведущих органов и расход топлива. Большинство перечисленных показателей имеет 54 на разных передачах различные значения; для них приводятся кривые на нескольких передачах. Тяговая характеристика, построенная по расчетным данным, называется теоретической. Ее можно представить в виде графика, состоящего из двух частей – верхней и нижней. Непосредственно тяговая характеристика строится в верхней половине графика. Нижняя половина имеет вспомогательное значение и служит для нанесения исходных параметров тракторного двигателя. Рассмотрим построение тяговой характеристики для трелевочного трактора ТТ-4 весом 130 кН, движущегося на подъем в 8 0 по летнему волоку со скоростью 0,55 м/с и пакетом V = 12 м3 (комлем на щит). γ = = 0,9 т/м ³ – удельная масса древесины; Q 12 0,9 10,8 т; Q1 72 кН; Q 2 36 кН. Необходимо определить максимальную мощность двигателя, построить его скоростную характеристику, выбрать передаточные числа трансмиссии и построить тяговую характеристику машины. Проведя расчеты по уравнениям (2.1) – (2.7), получают, что максимальная мощность для трех режимов движения трелевочного трактора равна: Ne1 = 79,2 кВт; Ne2 = 90,4 кВт; Ne3 = 56,3 кВт. За прототип данного двигателя выбирают тракторный дизельный двигатель А–01М, имеющий: Ne = 99 кВт; neном = 28,3 об/с; qеmin = = 0,245 кг/(кВт ч). По формулам (2.63) – (2.66) С. Р. Лейдермана определяют исходные данные для построения скоростной характеристики двигателя мощностью 90,4 кВт. Результаты расчета сведены в табл. 8. Определение и выбор передаточных чисел трансмиссии для данной машины проводят по уравнениям (3.26) – (3.35). Проведя расчет, получают значения передаточных чисел в коробке передач и трансмиссии на различных передачах: i кI = 3,4; i кII = 2,1; i кIII = 1,3; i кIV = 0,8; i кV = 0,5; III V IV i Iтр = 100; i II тр = 61,35; i тр = 37,64; i тр = 23,52; i тр = 14,0. Таблица 8. Параметры скоростной характеристики 10 13 16 19 22 25 28,3 ne 48,8 60,7 71,4 80,3 86,8 90,4 31 34 89,7 85,2 Ne 36,5 ge 0,304 0,283 0,268 0,259 0,256 0,259 0,270 0,283 0,305 N e 580,4 598,0 603,4 596,6 580,7 552,2 507,4 460,5 398,7 G T 11,09 13,81 16,25 18,48 20,55 22,47 24,35 25,42 25,95 55 Построение тяговой характеристики производится следующим образом. Обозначают начало координат верхней половины характеристики буквой О и откладывают на оси абсцисс в выбранном масштабе силы тяги на крюке Pкр (рис. 9). Началом координат нижней части характеристики будет служить точка О’, расположенная влево от точки О на расстоянии, равном в том же масштабе силе сопротивления качению трактора [ Pf min G Q1 f min ] с грузом, при заданных почвенных условиях. При построении теоретической тяговой характеристики допускается, что коэффициент сопротивления качению f постоянен на всех режимах работы. Таким образом, отрезки Pf Pкр нижней части графика представляют собой касательную силу тяги Pk в принятом масштабе. Допускаем также, что коэффициент полезного действия трансмиссии имеет на каждой передаче постоянное значение, независимо от степени загрузки трактора. При постоянстве к.п.д. трансмиссии касательная сила тяги трактора прямо пропорциональна крутящему моменту двигателя: Pk где A i тр тр г R зв M e i тр тр г R зв A Me , (4.28) , А – переводный коэффициент масштаба моментов M e , Н м , в масштаб сил Pk , Н. Для каждой передачи он имеет свое значение. Чтобы построить масштабные шкалы крутящих моментов двигателя, поступают следующим образом: определяют с помощью уравнения (4.28) касательные силы тяги на разных передачах при номинальном крутящем моменте двигателя; отрезки, изображающие на оси абсцисс полученные значения Pk , сносят вниз и принимают, что каждый из них представляет в своем масштабе номинальный крутящий момент двигателя M н ; аналогично находят на масштабных шкалах точки, соответствующие максимальному крутящему моменту двигателя M e max . 56 Рис. 9. Тяговая характеристика гусеничного трелевочного трактора 57 В нижней части графика строят кривые, показывающие, как меняются в зависимости от величины крутящего момента двигателя его частота вращения n e , эффективная мощность N e и часовой расход топлива G T . Для каждой передачи кривые строят по своей масштабной шкале. Одноименные кривые образуют пучки с общими центрами. Центр пучка кривых N e находится в начале координат О’; вершины лежат на горизонтали, ордината которой представляет в принятом масштабе номинальную эффективную мощность двигателя N e max 90,4 кВт. Центр пучка кривых n e расположен на оси ординат в точке, соответствующей максимальной частоте вращения n e хол = 1,09 28,3 = 31 об/с вала двигателя на холостом ходу. Кривые G T берут начало на оси ординат в точке, соответствующей часовому расходу топлива G T x на холостом ходу ( G T x 11,09 кг/ч) двигателя (при номинальной частоте вращения вала двигателя на холостом ходу), ордината горизонтальной прямой, проходящей через их вершины, представляет в принятом масштабе максимальный часовой расход топлива (GT max = 24,35 кг/ч). Все кривые должны быть закончены при максимальных значениях крутящего момента коленчатого вала двигателя Me max (GT = 16,25 кг/ч). После этого приступают непосредственно к построению тяговой характеристики трелевочного трактора. На оси абсцисс теоретической тяговой характеристики (рис. 9) откладывают два аргумента: крутящие моменты, развиваемые двигателем, и соответствующие им значения Pk касательных сил тяги. Принятые для них масштабы определяют из уравнения (4.28). Полученные значения переводного коэффициента А сведены в табл. 12. Например, для I передачи имеем: A1 100 0.81 0.95 / 0.263 292 .6 . Аналогично получаем коэффициенты А на остальных передачах. Таблица 9. Основные параметры тяговой характеристики Параметр I передача II передача III передача 100 58.75 34.60 292.6 179.5 110.1 Pk ном 148465 91078 55865 Pk max 176552 108309 66433 i тр А 58 Ранее при построении скоростной характеристики были получены: M e ном = 507.4 Н∙м, соответствующий n e = 28.3 об/с, и M e max = 182.5 Н∙м, соответствующий n e = 16.0 об/с. Умножив указанные моменты на переводные коэффициенты А, находим соответствующие им на каждой передаче значения касательных сил тяги (см. табл. 9). Так, например, для I передачи имеем: Pk ном = M e ном · A1 = 507.4 · 292.6 = 148465 Н; Pk max = M e max · A1 = 603.4 · 292.6 = 176552 Н. Очевидно, Pk max , полученная на I передаче, будет наибольшей величиной во всем диапазоне изменения Pk . Исходя из этого, выбираем масштаб по оси абсцисс и откладываем от точки О’ центра координат нижней части вправо значения касательных сил тяги Pk , а под осью наносим масштабные шкалы крутящих моментов M e по отдельности для каждой передачи. На каждой шкале отмечаем точки, соответствующие номинальному M e ном и максимальному M e max крутящим моментам. Положение этих точек определяем следующим образом. Значения Pk ном и Pk max отмечаем на оси абсцисс попарно отдельно для каждой передачи, и полученные точки проектируем на соответствующие шкалы моментов заданных передач. Таким образом, на каждой шкале отсекаются, как указано стрелками (рис. 9), положения точек M e ном и M e max . Затем из точки О' откладывают вправо от оси абсцисс отрезок O’O, изображающий в принятом масштабе силу сопротивления качению Pf min с грузом, которая была определена ранее. Точка О' служит центром ординат нижней части тяговой характеристики; точка О – центром координат верхней части; вертикали, проведенные из них вниз и вверх, являются осями ординат. Вдоль осей ординат наносят масштабные шкалы тех параметров, которые должны быть представлены в каждой части характеристики: n e , G T , N e – в нижней части, а , V, N кр , g кр – в верхней части. Нулевые значения всех указанных параметров берут от оси абсцисс, за исключением частоты вращения вала двигателя, отсчет которой для удобства изображения начинаем с n e = 10 об/c и скорости движения трактора, нулевую точку которой располагаем выше оси абсцисс. В нижней части графика приведены кривые регуляторной характеристики двигателя, построенные в функции от его крутящего момента. Кривые строят для каждой передачи по своей масштабной шкале, 59 поэтому каждый параметр изображен в виде пучковых кривых. Чтобы построить пучок кривых N e , поступают следующим образом: через точку N e max = 90,4 кВт на оси ординат проводят прямую, параллельную оси абсцисс. Находят точки пересечения этой прямой с вертикалями, проходящими через точки M e ном на масштабных шкалах моментов. Так, для первой передачи это будет точка «а» (рис. 9). Полученные точки пересечения соединяют с центром координат О' прямыми линиями, которые являются регуляторными ветвями характеристик двигателя. Через точку N e max на оси ординат проводят горизонтальную прямую. N e max M e max n м / 159 .1 603 .4 16 .0 / 159 .1 60 .68 кВт, где n м – частота вращения, соответствующая максимальному крутящему моменту. Точки пересечения этой прямой с вертикалями, проведенными из точек M e max на масштабных шкалах моментов, дадут нам границы рабочих участков безрегуляторных ветвей характеристик. Так, для I передачи это будет точка «в» (рис. 9). Затем приступают к построению пучка кривых G T . Эти кривые берут начало на оси ординат в точке, соответствующей часовому расходу топлива G T X при минимальной частоте вращения вала двигателя на холостом ходу. Из технической характеристики двигателя А-01 М устанавливают, что минимальная частота вращения вала на холостом ходу n e хол = 10 об/с. Из построенной скоростной характеристики определяют, что этой частоте вращения соответствует часовой расход топлива G T X = 11,09 кг/ч. Вершины пучка кривых G T X лежат на горизонтальной прямой, проходящей через точку G T max = 24,35 кг/ч, соответствующую часовому расходу топлива при максимальной мощности, и являются точками пересечения данной прямой с вертикалями, проведенными через точку M e ном . Так, вершиной кривой G T на I передаче будет точка «с». Все кривые пучка G T заканчивают при максимальных значениях крутящего момента. Таким образом, для I передачи кривая G T будет закончена в точке «α» пересечения двух прямых: горизонтальной, проходящей через точку G T 0 = 16,25 кг/ч, и вертикальной, проходящей через точку M e max . В нижней части графика осталось построить пучок кривых n e . Центр этого пучка находится на оси в точке, соответствую- 60 щей максимальной частоте вращения n e хол вала двигателя при холостом ходу. Величину максимальной частоты вращения коленчатого вала двигателя на холостом ходу выбираем из технической характеристики двигателя (машины). Вершины пучка кривых n e лежат на горизонтальной прямой, проходящей через точку n e ном = 28,3 об/с, и являются точками пересечения этой прямой с вертикалями, проведенными через точки M e ном . Для I передачи это будет точка «е». Все кривые пучка n e будут закончены при максимальных значениях крутящего момента M e max . Так, для I передачи кривая n e будет закончена в точке «h» пересечения горизонтальной прямой, проходящей через точку n м = 16,0 об/с, и вертикальной прямой, проходящей через точку M eI max . На этом построение кривых нижней вспомогательной части графика закончено. В верхней части тяговой характеристики первой строят кривую буксования f ( Pкр ) , для чего, пользуясь уравнением (4.29), рассчитывают необходимые значения , (они приведены в табл. 10). 10 к 20 2к , где к (4.29) Pk – коэффициент использования сцепного веса трактора. G сц к1 = 20200/202000 = 0,1; к 2 = 32000/202000 = 0,158. Подставив полученные значения к в равенство (4.29), получим: 1 = 1,2; 2 =2,079. В отличие от других кривых тяговой характеристики, кривая буксования является общей для всей характеристики, т. к. с достаточной точностью можно принять, что буксование ведущих органов зависит только от величины тягового усилия, независимо от того, на какой передаче это усилие получается. После кривой буксования в верхней части графика строят кривые действительных скоростей отдельно для каждой передачи. Рассмотрим построение этой кривой для I передачи. Берем на оси абсцисс 15 точек и проводим через них вертикали до пересечения с кривой буксования в верхней части и кривой частоты вращения в нижней части. Ординаты полученных точек пересечения дают искомые значения n e и , входящие в уравнение (4.30). Подсчитав по этому уравнению ряд точек Vд (табл. 10), строим в верхней части графика кривую действительной ско61 рости на I передаче. Аналогично строятся кривые скоростей на остальных передачах. (1 ) 6,28 R зв n e VД ; (4.30) i тр (1 0,012 ) 6,28 0,263 30,8 0,503 м/с; 100 (1 0,02079 ) 6,28 0,263 30,58 VД 2 0,495 м/с. 100 Чтобы определить значения n e и , входящие в это уравнение, берут на оси абсцисс ряд точек (не менее семи для трех передач) и проводят через них вертикали до пересечения с кривой буксования в верхней части графика и кривой частоты вращения в нижней части (соответственно рассматриваемой передаче). Ординаты точек пересечения определяют искомые значения n e и . Подсчитав ряд значений Vд, строят в верхней части графика кривую действительной скорости на данной передаче. Аналогично строятся кривые на отдельных передачах. Затем определяют тяговую мощность (мощность на крюке) трактора по формуле: (4.31) N кр Pкр VД ( Pk Pf ) VД . VД1 N кр1 0 0,503 0 . N кр2 11800 0,496 5,841 кВт. Пользуясь уравнением (4.31), рассчитывают значения тяговой крюковой мощности трактора на I передаче (табл. 10) и на остальных передачах. Получив таким образом необходимые данные, строят в верхней части графика кривые тяговых мощностей. Кроме того, на тяговой характеристике необходимо нанести кривые удельных расходов топлива на один тяговый киловатт в час. Рассмотрим подробнее построение кривой удельного расхода топлива на I передаче. Для того чтобы получить данные для построения этой кривой, в уравнение (4.32) вводят две величины: G T и N кр , значения которых берутся из графика. Выбирают шесть точек в диапазоне изменения N кр от 50 до 100 %, а также две точки, лежащие в зоне тяговых усилий правее N кр max. Проектируют данные точки на кривую G TI , построенную в нижней части графика, а затем по уравнению (4.32) рассчитывают значения удельного расхода I I топлива на I передаче g кр . Построить кривую g кр в верхней части графика по полученным данным уже не представляет трудностей. Аналогично проводят построение кривых удельных расходов топлива на 62 остальных передачах. Таким образом, построение тяговой характеристики трелевочного трактора закончено. Величина g кр определяется по формуле: g кр GT , N кр (4.32) где G T – часовой расход топлива, кг, соответствующий работе трактора на данной передаче с тяговой мощностью N кр , 17 ,933 19 ,733 0,569 кг/(кВт ч); g кр8 0,566 кг/(кВт ч). 31,541 34 ,873 Для определения величины G T проектируют рассматриваемую точку N кр на кривую часового расхода топлива, построенную для данg кр 7 ной передачи в нижней половине графика. На кривой отмечают искомое значение часового расхода. Такие графоаналитические расчеты проводят для ряда точек, лежащих на кривых N кр . По полученным данным в верхней половине графика строят кривые удельных расходов топлива g кр на разных передачах. Значение удельных расходов топлива g кр зависят от экономичности двигателя, степени его загрузки и от тягового к.п.д. трактора. Чтобы отразить с достаточной полнотой влияние всех этих факторов, кривые удельных расходов надо строить на каждой передаче для широкого диапазона тяговых нагрузок. Следует знать, что ГОСТ 7057-2001 «Методы полевых испытаний тракторов» рекомендует для оценки топливной экономичности трактора рассматривать, как влияет на удельные расходы топлива g кр изменение тяговой мощности в пределах от 100 до 50 % на каждой передаче. Кривые g кр должны также охватывать зоны тяговых усилий, лежащие правее точек N кр max. Это дает возможность судить о топливной экономичности трактора при перегрузках. Построенная тяговая характеристика должна быть проанализирована с точки зрения оценки полученных показателей, исследования характера их изменения в зависимости от тяговой нагрузки и других условий работы и выяснения влияния оказываемого на них различными факторами. Имея тяговую характеристику трактора, можно, в частности, определить, чему равен его тяговый к.п.д. при различных условиях работы на заданном почвенном фоне. Для этого берем на характеристике 63 не менее 6–8 точек и для каждой из них находим значение тягового к.п.д., пользуясь соотношением N кр тяг , (4.33) Ne где N кр – тяговая мощность трактора в выбранной точке; N e – эффективная мощность, развиваемая при этом его двигателем, 5,841 11,567 тяг2 0,298 ; тяг3 0,432 . 19 ,6 26,8 Величину N e находят, проектируя взятую точку N кр на соответствующую данной передаче кривую эффективной мощности, расположенную в нижней части графика; полученная на этой кривой точка определяет искомую мощность N e . Значение тягового к.п.д. трактора может быть также рассчитано аналогичным путем по формуле: Pf теор (4.34) ; тяг тр о f тр (1 ) 1 Pкр Pf 20200 теор тяг2 0,81 (1 0,02079 ) 1 0,292 ; 32000 20200 теор тяг3 0,81 (1 0,0313 ) 1 0,424 . 44000 Сопоставление значений тягового к.п.д., полученных двумя изложенными методами, может служить средством контроля за правильностью построения тяговой характеристики; при отсутствии ошибок и аккуратном выполнении графических работ результаты расчетов по обеим методикам должны совпадать. Таким образом, построение тяговой характеристики трелевочного трактора закончено. Правильность проведенных построений проверяют сопоставлением значений тягового к.п.д., полученных по уравнениям (4.33) и (4.34). Для того чтобы получить значения тяг по уравнению (4.33), пользуются уже известным приемом. Выбирают несколько точек (6–9) на оси абсцисс тяговой характеристики и проводят вертикали до пересечения с кривой тяговой мощности в верхней части графика и кривой эффективной мощности в нижней части. При этом не следует забывать о соответствии кривых N кр и N e рассматриваемой передаче. 64 Рассчитанные по уравнению (4.33) значения тяг , а также значения тягового к.п.д., полученные из уравнения (4.34) аналитическим путем, сведены в табл. 10. Совпадение результатов расчетов по обоим методам гарантирует правильность построения тяговой характеристики. 65 66