О. А. ЛУКАШУК
Я. Л. ЛИБЕРМАН
РОТОРНЫЕ
ТРАНШЕЙНЫЕ ЭКСКАВАТОРЫ:
ПРОЕКТИРОВАНИЕ И РАСЧЕТ
Учебно-методическое пособие
Министерство науки и высшего образования
Российской Федерации
Уральский федеральный университет
имени первого Президента России Б. Н. Ельцина
О. А. Лукашук
Я. Л. Либерман
Роторные
траншейные экскаваторы:
проектирование и расчет
Учебно-методическое пособие
Рекомендовано методическим советом
Уральского федерального университета
для студентов вуза, обучающихся
по направлениям подготовки
23.03.02 — Наземные транспортно-технологические
комплексы,
23.05.02 — Транспортные средства
специального назначения
Екатеринбург
Издательство Уральского университета
2022
УДК 621.879.48(075.8)
ББК 38.623я73
Л84
Рецензенты:
кафедра горных машин и комплексов Уральского государственного горного университета (и. о. завкафедрой проф., д‑р техн. наук Ю. А. Лагунова);
А. В. Анцупов, проф. д‑р техн. наук, доц. (Московский государственный
технический университет им. Н. Э. Баумана (национальный исследовательский университет)
Научный редактор — д‑р техн. наук, проф. Г. Г. Кожушко
Изображение на обложке с сайта https://www.noen.cz/bg/
Лукашук, О. А.
Л84 Роторные траншейные экскаваторы: проектирование и расчет : учебно-методическое пособие / О. А. Лукашук, Я. Л. Либерман ; М‑во науки
и высш. образования РФ. — Екатеринбург : Изд-во Урал. ун-та, 2022. —
154 с.
ISBN 978-5-7996-3548-0
Учебное пособие содержит краткий теоретический и справочный материал и методические указания по проектированию и расчету роторных траншейных экскаваторов. Приводятся сведения по назначению, устройству, техническим
характеристикам и принципу расчета основных элементов роторных экскаваторов. Особое внимание уделено новым направлениям в проектировании роторных
траншейных экскаваторов, вопросам конструктивной разработки основных элементов. В отдельной главе рассмотрены прогрессивные конструкции ковшей активного действия.
Работа предназначена для студентов уровней подготовки «бакалавр» и «специалист».
Табл. 10. Рис. 51.
ISBN 978-5-7996-3548-0
УДК 621.879.48(075.8)
ББК 38.623я73
© Уральский федеральный
университет, 2022
Оглавление
Введение............................................................................................... 5
1. Экскаваторы непрерывного действия.............................................. 6
1.1. Назначение, область применения и классификация
экскаваторов непрерывного действия.................................... 6
1.2. Рабочее оборудование экскаваторов..................................... 10
1.3. Рабочие механизмы экскаваторов......................................... 24
1.4. Краткие сведения о траншейных роторных экскаваторах... 26
Контрольные задания................................................................... 31
2. Выбор основных параметров.......................................................... 34
2.1. Основные параметры ротора................................................. 34
2.2. Основные параметры отвального конвейера........................ 41
2.3. Влияние формы стружки и формы режущего органа
на удельное сопротивление копанию................................... 49
Контрольные вопросы.................................................................. 55
3. Общий расчет экскаватора............................................................ 56
3.1. Определение мощности привода ротора............................... 56
3.2. Определение мощности привода отвального конвейера...... 62
3.3. Тяговый расчет....................................................................... 64
3.4. Выбор силового оборудования.............................................. 71
Контрольные вопросы и задания................................................. 72
4. Пример расчета роторного траншейного экскаватора................... 73
4.1. Выбор основных параметров................................................. 73
4.2. Выбор основных параметров отвального конвейера............ 77
4.3. Определение мощности привода........................................... 84
4.4. Определение мощности привода отвального конвейера...... 89
4.5. Тяговый расчет....................................................................... 90
Контрольные вопросы и задания................................................. 96
3
Оглавление
5. Новые направления в проектировании и эксплуатации
траншейных роторных экскаваторов............................................. 97
5.1. Выбор режимов работы экскаватора из условия
недопустимости резонансных явлений................................. 98
5.2. Снижение вероятности резонанса при работе
экскаватора за счет рационального выбора
конструктивных параметров ковшей и ротора....................105
5.3. Устранение вибраций механизмов экскаватора
путем применения адаптивных виброгасителей.................111
5.4. Прогрессивные конструкции ковшей активного
действия.................................................................................120
5.5. Оптимальное управление ударниками ковша
активного действия...............................................................130
5.6. Сокращение потребляемой мощности приводов
экскаватора и повышение его производительности............135
5.7. Автоматическое управление отвальным конвейером
роторного экскаватора..........................................................143
Контрольные вопросы и задания................................................149
Список библиографических ссылок...................................................150
4
Введение
Р
азвитие строительного производства, происходящее в последние десятилетия в нашей стране, естественным образом влечет
за собой рост объемов земляных работ и, в частности, увеличение протяженности траншей, необходимых для прокладки коммуникаций. Наиболее рациональным техническим средством копания
траншей являются специально предназначенные для этого многоковшовые траншейные экскаваторы продольного копания [1–3]. Многоковшовые траншейные экскаваторы востребованы в строительстве
газопроводов, канализационных и коллекторных коммуникаций, при
прокладке подземных систем связи на километровые расстояния, при
рытье неглубоких котлованов. Ими удобно проводить выемку земли
на раскопках или масштабных ремонтных, при спасательных операциях. Кроме того, траншейные роторные экскаваторы используются
в горной промышленности, в сфере обороны и мелиорации. По типу
основного рабочего органа данные экскаваторы подразделяются на роторные и цепные. У роторных траншейных экскаваторов рабочий орган представляет собой колесо с ковшовыми и режущими органами
для резания и подъема грунта из траншеи, у цепных экскаваторов рабочий орган выполняют в виде бесконечной цепи. Для выгрузки грунта в отвал и зачистки дна траншеи оба типа машин оборудуют поперечным ленточным конвейером и зачистным башмаком.
Преимущества траншейных экскаваторов: высокая производительность, мобильность маневренность. Недостатки: низкая годовая нагрузка; ограничение универсализации из-за существенного различия
физико-механических свойств разрабатываемых грунтов.
5
1. Экскаваторы непрерывного действия
1.1. Назначение, область применения
и классификация экскаваторов непрерывного действия
Э
кскаваторами называются землеройные машины, предназначенные для копания и перемещения грунта. Все экскаваторы делятся на две большие группы: периодического
(цикличного) действия — одноковшовые и непрерывного действия —
многоковшовые. Экскаваторами непрерывного действия называются
землеройные машины, разрабатывающие и транспортирующие грунт
непрерывно. При этом обе операции — копание и транспортирование грунта — выполняются одновременно. В отличие от одноковшовых экскаваторов, экскаваторы непрерывного действия обеспечивают более высокую выработку.
Роторные траншейные экскаваторы (ЭТР) представляют собой навесное или полуприцепное к переоборудованному гусеничному трактору или специальному тягачу землеройное оборудование и предназначены для разработки траншей прямоугольного и трапецеидального
профиля в однородных немерзлых грунтах I–IV категорий, не содержащих крупных каменистых включений (крупнее 300 мм), а также
в мерзлых грунтах при различной глубине промерзания верхнего слоя.
Глубина отрываемых траншей определяется в соответствии с диаметром ротора. Увеличение глубины копания связано со значительным возрастанием диаметра и массы ротора, и поэтому рациональный
предел глубины копания для ЭТР не превышает 3 м. Дальнейшее увеличение этого параметра требует соответствующего увеличения диаметра ротора и связанной с ним габаритной высоты, предельные значе6
1.1. Назначение, область применения и классификация экскаваторов непрерывного действия
ния которой регламентированы условиями безопасного передвижения
экскаватора при его перебазировании на новый объект под мостами,
эстакадами, линиями электропередач и т. п. Цепные рабочие органы,
при переводе в транспортное положение, располагают почти горизонтально, а их длина практически не влияет на изменение габаритной
высоты экскаватора [4].
Для сокращения полосы отчуждения земли, на время строительства, вынутый из траншеи грунт компактно укладывают в бруствер
с одной ее стороны, оставляя другую сторону для передвижения транспортных средств, обслуживающих строительство, а также для сварки
и монтажа труб, трубных секций и плетей перед их укладкой в траншею. При разработке узких траншей роторными фрезерными и цепными скребковыми экскаваторами, вынесенный из траншеи грунт
располагают с двух ее сторон.
В устойчивых грунтах траншею роют без откосов, а в менее — с откосами, для чего рабочие органы экскаваторов дооборудуют пассивными ножевыми или активными цепными откосниками.
Для эффективной работы траншейных экскаваторов, трассу их передвижения в полосе будущей траншеи расчищают от деревьев, кустарника, камней и планируют ее поверхность. Требования к продольной
планировке формулируются в соответствии с нормами на продольные
уклоны дна траншеи. Например, для безнапорных трубопроводов эти
уклоны должны обеспечивать передвижение по ним жидких продуктов
самотеком. В случае использования напорных трубопроводов, например для перекачивания нефти и газа под давлением, сохраняется лишь
требование прилегания трубопровода к дну траншеи по всей его длине.
Более высокие требования на период рытья траншеи предъявляются к поперечным уклонам, особенно к плавности их изменения вдоль
трассы передвижения экскаватора. При резких изменениях поперечных уклонов рабочий орган, перекашиваясь, прижимается нижней частью к одной стороне траншеи, а верхней — к другой. При этом на боковых зубьях возникают повышенные сопротивления сил трения при
их перемещении по боковым стенкам траншеи, что приводит к повышенному их изнашиванию и непроизводительным энергетическим затратам с уменьшением скорости передвижения экскаватора, а следовательно, снижению его производительности [4].
При разработке узких траншей отмеченные силы сопротивления
могут возрасти настолько, что мощности силовой установки окажет7
1. Экскаваторы непрерывного действия
ся недостаточно для их преодоления и рабочий орган застопорится.
На крутых косогорах так же, как и при работе на кривых трассах малых радиусов, работа экскаватора становится невозможной.
Возможность работы траншейного экскаватора, оборудованного
ленточным конвейером, на косогорах ограничена также способностью
конвейера уложить вынутый из траншеи грунт в бруствер на заданном
расстоянии от траншеи с сохранением между бруствером и траншеей
горизонтальной площадки (бермы) шириной не менее 0,5 м. Анализ
работы отвального конвейера в этих условиях приведен в п. 2.2.
Являясь машиной непрерывного действия, траншейный экскаватор наиболее полно реализует свои технические возможности при работе в однородных грунтах на прямолинейных участках большой протяженности. При работе на коротких участках экскаватору приходится
чаще отрывать пионерные выемки для ввода рабочего органа в траншею, а также чаще выводить его из траншеи. В обоих случаях требуется
доработка траншеи до полного профиля другими средствами, например одноковшовыми экскаваторами. При этом длина захода и выхода будет меньшей у экскаваторов с навесным рабочим оборудованием, которое заглубляется и выглубляется на месте без передвижения
экскаватора, как это имеет место у экскаваторов с полуприцепным рабочим оборудованием.
Передача энергии от дизеля тягача к основным исполнительным
механизмам и вспомогательному оборудованию (механизмам подъема рабочего органа и конвейера) осуществляется с помощью механической, гидравлической или электромеханической трансмиссии.
Экскаваторы непрерывного действия являются выемочно-погрузочно-транспортирующими агрегатами, состоящими из трех машин:
выемочной, погрузочной и транспортной [5, 6].
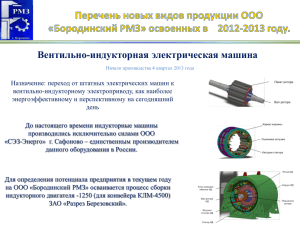
Применяются следующие типы экскаваторов непрерывного действия: роторные (рис. 1.1), цепные (рис. 1.2) и фрезерные (рис. 1.3).
8
1.1. Назначение, область применения и классификация экскаваторов непрерывного действия
Рис. 1.1. Конструктивная схема роторного экскаватора с выдвижной стрелой:
1 — ротор; 2 — выдвижная стрела; 3 — подвеска стрелы; 4 — пилон; 5 — надстройка; 6 — стрела противовеса; 7 — выдвижная тележка; 8 — лебедка подъема стрелы; 9 — отвальная консоль; 10 — гусеничная тележка; 11 — поворотная платформа; 12 — конвейер роторной стрелы;
13 — конвейер стрелы противовеса; 14 — перегрузочный конвейер; 15 — отвальный конвейер
3
4
υр
1
υр
2
Рис. 1.2. Конструктивная схема многоковшового цепного экскаватора
с гусеничным ходовым оборудованием:
1 — ковш; 2 — ковшовая рама; 3 — приводная звездочка; 4 — приемный желоб;
vр — скорость рабочая
9
1. Экскаваторы непрерывного действия
8
1
3
2
4
9
10
5
6 7
18
17 16
15
14 13 12
11
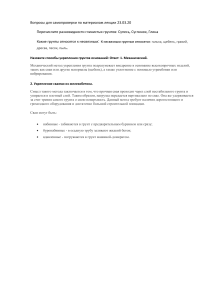
Рис. 1.3. Схема фрезерного экскаватора Wirtgen:
1, 5, 12 — гидроцилиндры; 2 — радиатор; 3 — двигатель; 4 — бак для гидравлической жидкости; 6 — бак для воды; 7 — коробка передач; 8 — прожектор; 9 — блок
кондиционера; 10 — кабина оператора; 11 — механизм регулирования по высоте;
13 — режущий барабан; 14 — скреперный нож; 15 — топливный бак; 16 — приемный конвейер; 17 — поворотный стол; 18 — разгрузочный конвейер
1.2. Рабочее оборудование экскаваторов
Роторные экскаваторы. Значительная вариация условий применения роторных экскаваторов явилась причиной большого разнообразия конструктивных решений их рабочего оборудования (см. данные
на с. 13) [7].
Рабочее оборудование роторных экскаваторов включает в себя рабочий орган — ротор с ковшами (рис. 1.4), приемно-питающее устройство (рис. 1.5) и стрелу (рис. 1.6).
Тип рабочего органа роторного экскаватора определяется способом разгрузки ковшей (рис. 1.7).
Камерные роторы, благодаря значительной жесткости конструкций и небольшой высоте падения материала на конвейер при выгрузке, успешно применяются для экскавации крепких грунтов.
10
1.2. Рабочее оборудование экскаваторов
1
2
3
4
Рис. 1.4. Ротор:
1 — колесо; 2 — обечайка; 3 — ковш; 4 — привод
аà
1
бá
вâ
1
2
1
2
2
3
3
3
Рис. 1.5. Конструктивные схемы приемно-питающих устройств ротора
бескамерного типа:
а — неподвижный желоб; б — вращающийся конус; в — барабанный питатель:
1 — ротор; 2 — приемно-питающее устройство; 3 — конвейер
11
12
1
2
1 — ротор; 2 — конвейер; 3 — приводной барабан; 4 — стрела
Рис. 1.6. Стрела ротора с приемным конвейером:
À
4
3
1064
À
À-À
1. Экскаваторы непрерывного действия
1.2. Рабочее оборудование экскаваторов
Классификация рабочего оборудования роторных экскаваторов
по конструктивно-компоновочным признакам
Классификационный
признак
Конструктивное исполнение стрелы ротора
Тип подвески стрелы
ротора
Расположение оси вращения ротора относительно оси барабана приемного конвейера
Расположение приемной
части конвейера относительно ротора
Способ разгрузки
ковшей
Конструкция ротора
с гравитационной разгрузкой ковшей
Конструкция разгрузочного сектора
Конструкция приемнопитающего устройства
бескамерного (полукамерного) ротора
Конструкция экскавирующих элементов
Тип привода
Привод вращения
и подачи ротора
Вариант исполнения
Постоянной длины и с фиксированной точкой опоры
Раздвижная, с фиксированной точкой опоры
Постоянной длины и с выдвижной точкой опоры
Полиспастная
Вантовая (стержневая)
Гидравлическая
Параллельное
Под углом в горизонтальной плоскости
Под углом в вертикальной плоскости
Под углом в горизонтальной и вертикальной плоскостях
Боковое
Внутри ротора
За ротором
Гравитационный
Инерционный (центробежный)
Комбинированный
Камерная
Бескамерная
Полукамерная (комбинированная)
Неподвижная
Подвижная
С неподвижным желобом
С вращающимся конусом
С барабанным (роликовым) питателем
С тарельчатым питателем
С ленточным питателем
С питателем комбинированной конструкции
С ковшами
С ковшами и дополнительными (промежуточными)
режущими элементами
Электрический
Электрогидравлический
Гидравлический
Однодвигательный
Многодвигательный
13
1. Экскаваторы непрерывного действия
а
I
б
III
II
в
г
Рис. 1.7. Схемы основных типов роторов:
а — с гравитационной боковой разгрузкой (I — камерный; II — бескамерный; III — полукамерный); б — с гравитационной прямой разгрузкой через переднюю (заборную) часть ковшей; в — с инерционной разгрузкой; г — с комбинированной разгрузкой
Наибольшее применение в современных конструкциях роторных
экскаваторов нашли бескамерные роторы с гравитационной разгрузкой как наиболее универсальные. Полукамерные роторы, установленные на некоторых сверхмощных экскаваторах, являются определенным
развитием бескамерных. В таких конструкциях обеспечены: достаточная
разрыхленность грунта в ковшах (в связи со значительным резервом емкости), ускоренный процесс разгрузки и значительно меньшие ударные
нагрузки на конвейер благодаря уменьшенной высоте падения грунта.
Экскавирующие элементы рабочего органа. С применением роторных экскаваторов для разработки прочных грунтов, чтобы ограничить
динамику нагрузок на рабочем оборудовании, возникла необходимость
дробного деления срезаемой поясом ковша стружки. Конструктивно
это достигается увеличением числа ковшей, установкой между ними
промежуточных режущих элементов в виде поясов, ножей, резцов
(«клыков») или специальным исполнением режущего пояса ковша [7].
С учетом условий эксплуатации экскаватора, технические решения режущей части ковша могут быть объединены в пять основных
групп по назначению [8].
14
1.2. Рабочее оборудование экскаваторов
Группа I объединяет конструкции, выполненные в виде сплошного режущего пояса без зубьев с радиальным расположением боковых
кромок. Такие конструкции применяют для разработки песчаных, супесчаных и суглинистых грунтов, имеющих незначительную связность,
прочность и хорошо рыхлящихся при резании. Они отличаются простотой, технологичностью изготовления и удобством обслуживания.
Группа II отличается расположением боковых кромок под углом
в сторону вращения с наличием выступов, выполненных заодно с козырьком, либо одиночных (сдвоенных) зубьев, установленных по обеим сторонам пояса. Такие конструкции обычно применяют при разработке суглинков и глин, образующих стружку в виде отдельных кусков.
На малосвязных грунтах при таких поясах получают наименьшую энергоемкость экскавации. Наряду с энергетическими выгодами, данные
конструкции просты, технологичны, надежны и ремонтопригодные
(рис. 1.8, а).
Группа III — конструкции режущих поясов с радиально расположенными боковыми кромками, пояса оснащаются несколькими резцами с ориентацией их режущих кромок по контуру кромок пояса. Они
предназначены для резания грунтов, имеющих абразивные включения и прослойки повышенной прочности. Резцы предохраняют козырек от интенсивного износа (рис. 1.8, б).
Группа IV — режущие пояса с расположением боковых кромок под
углом в сторону, обратную вращению. Резцы устанавливают на режущих поясах по контуру кромок пояса. Такие конструкции пригодны
для разработки связных, плотных глин, бурых углей (рис. 1.8, в).
Группа V объединяет конструкции, обеспечивающие автономное, раздельное отделение элементов стружки каждым резцом при
разработке вязких, плотных, крупнотрещиноватых грунтов, а также грунтов сложноструктурного строения. Режущий пояс этих конструкций имеет боковые кромки, расположенные под постоянным
или увеличивающимся углом наклона в сторону, обратную вращению ротора, а режущие кромки резцов в сечении стружки ориентированы параллельно друг другу, обеспечивая согласно общей их
направленности ту или иную схему деления сечения стружки на элементы (рис. 1.8, г).
Применительно к современным роторным экскаваторам с невыдвижной стрелой ротора, снимающим стружку серповидной формы
в плане, предпочтительным оказывается режущий пояс с арочным
15
1. Экскаваторы непрерывного действия
расположением кромок резцов и их ориентацией в сечении стружки параллельно друг другу под углом к условной оси симметрии пояса, а в ряде случаев — с комбинированной ориентацией кромок [7].
а
б
в
г
Рис. 1.8. Конструкции ковшей:
а — ковш II группы; б — III группы; в — IV группы; г — V группы
16
1.2. Рабочее оборудование экскаваторов
В плоскости вращения ротора боковые кромки режущего пояса
расположены под углом к радиальной плоскости, который увеличивается в сторону, обратную вращению. Такая конструктивная схема
режущего пояса позволяет надежно делить сечение стружки на отдельные элементы при регулировании скорости боковой подачи ротора в широком диапазоне, требуемом для поддержания постоянства
производительности. Конструкция обусловливает устойчивое движение ротора как в горизонтальной, так и в вертикальной плоскости
с наименьшими потерями срезаемого материала при заборе его ковшом, а также использование резцов одного типа независимо от места
их установки на режущем поясе.
Корпус ковшей. Предпочтительные технические решения корпуса
ковша могут быть объединены в три основные группы по назначению:
1) корпус ковша цельной конструкции в виде оболочки со сплошной поверхностью, применяют для экскавации неналипающих
и ненамерзающих пород;
2) конструкции корпуса, имеющего цепную заднюю стенку, применимы при разработке слабоналипающих и намерзающих пород;
3) конструкции корпуса каркасного типа с охватываемым цепным днищем; предназначены для экскавации жирных вязких
глин и влажных углей.
Породоразрушающие элементы. Существенное значение для эффективности экскавации имеет конструктивное исполнение породоразрушающих элементов [7]. Это относится в основном к их режущей
части, а также к креплению их на несущей конструкции. Используемые на практике конструктивные решения породоразрушающих
элементов весьма разнообразны. На рис. 1.9 показаны зубья ковшей роторных экскаваторов различной конструкции. Зубья (коронки) предназначены для уменьшения первоначального усилия внедрения ковша в обрабатываемую среду, для уменьшения износа плоской
режущей кромки ковша. Для экономии легированных сталей и снижения трудоемкости замены зубьев разработаны составные зубья,
базовая часть которых состоит из обычных сортов стали и приваривается к козырьку ковша, из качественной стали изготовляется только сменная коронка.
17
1. Экскаваторы непрерывного действия
Рис. 1.9. Зубья (коронки) роторных экскаваторов
Приемно-питающие устройства. Запорный сектор рабочего органа с гравитационным ротором выполняется в виде единой конструкции, называемой обечайкой, включающей направляющие течки сектора разгрузки.
В зависимости от разновидности гравитационного рабочего органа (камерного, полукамерного и бескамерного) запорный сектор име18
1.2. Рабочее оборудование экскаваторов
ет свои особенности. При камерном роторе запорный сектор выполняется в виде плоского щита, устанавливаемого со стороны камерных
окон; при бескамерном — в виде цилиндрического щита, размещаемого в полости ротора, а при полукамерном — в виде комбинированной конструкции из плоского и цилиндрического щитов.
Запорный сектор должен обеспечивать: надежное удержание грунта от преждевременной выгрузки из ковшей; минимально возможные
просыпи в зазор между ободом ротора и сектором; минимальное сопротивление от сил трения; достаточно высокую износостойкость,
невозможность возникновения расклинивающих и стопорящих сил
между неподвижной обечайкой и вращающимся ротором.
При разработке бескамерным гравитационным ротором кусковатой среды, в силу достаточно большой линейной скорости резания
(до 3 м/с), поступающие в нижние ковши куски в первоначальный
момент соприкосновения с ковшами находятся под преобладающим
действием инерционной силы самой массы куска, что обусловливает
их ускоренное продвижение по днищу к задней стенке ковша вплоть
до выхода внутрь ротора через подковшовое окно. Проникновение
внутрь ротора кусков, особенно крепких, может привести к их заклиниванию между задней стенкой ковша и нижней кромкой запорного
сектора и, как следствие, к разрушениям обечайки. В современных
конструкциях рабочих органов с бескамерным ротором, для предупреждения таких явлений, запорный сектор, встраиваемый в обечайку, перекрывает всю нижнюю часть обода ротора.
Инерционный (центробежный) рабочий орган в качестве запорного сектора имеет щиток цилиндрического очертания, встроенный
в неподвижный козырек, который соединен с приемным бункером.
Поскольку запорный сектор представляет собой как бы продолжение
поверхности забоя, при наличии зазора между верхней кромкой забоя
и щитком не исключается возможность заклинивания кусков между
задней стенкой ковша и щитком. В связи с этим, в дополнение к перечисленным выше требованиям, предъявляемым к конструкции запорного сектора, последний должен обладать упругодемпфирующими
свойствами для поддержания в процессе работы минимального зазора между щитком и кромкой забоя.
Поступающая из разгружающихся ковшей масса грунта принимается и передается на конвейер роторной стрелы приемно-питающими устройствами. Наибольшее число разновидностей этих устройств
19
1. Экскаваторы непрерывного действия
используются при работе гравитационного бескамерного ротора. Это
связано с необходимостью: приема выгружаемого из ковша грунта и сообщения ему скорости, по направлению и значению близкой к скорости ленты приемного конвейера; обеспечения требуемой пропускной
способности при пульсирующем характере потока массы и изменяющихся углах наклона роторной стрелы; полного перекрытия сектора
разгрузки; обеспечения достаточно высокой надежности и износостойкости конструкции при минимально возможной массе. Наиболее
сложно решать эти задачи для условий экскавации влажных, липких
грунтов и крепких, кусковатых грунтов повышенной абразивности.
Практика экскаваторостроения показывает, что по основным эксплуатационным факторам (надежности, ремонтопригодности, стойкости к ударным нагрузкам, ограниченной интенсивности налипания и намерзания) предпочтительны приемно-питающие устройства
бескамерного типа в виде неподвижного желоба [7]. При этом надежность работы на влажных, липких грунтах достигается за счет футерования неподвижного желоба, направляющих и прилегающих течек
приемного бункера (даже при вращающемся конусе и барабане) гидрофобными износостойкими материалами типа высокомолекулярного полиэтилена низкого давления. Вместе с тем ни одна из названных
конструкций питателей в полной мере не удовлетворяет требованию
необходимости сообщать выгружаемому из ковшей грунту скорость,
соответствующую скорости ленты приемного конвейера. В наибольшей степени данному требованию удовлетворяет тарельчатый питатель, однако сложность конструкции, трудности перекрытия сектора
разгрузки при больших диаметрах ротора и прочие причины не позволяют его рекомендовать в качестве предпочтительного, кроме как для
экскаваторов малой мощности.
При использовании в качестве приемно-питающего устройства
неподвижного желоба, его рабочие поверхности, воспринимающие
поток выгружаемого грунта, устанавливают так, чтобы угол наклона
их к горизонту оставался равным не менее 50–55° (по условиям предупреждения интенсивного налипания и намерзания материала) при
всех возможных положениях стрелы ротора.
Для снижения ударных нагрузок на ленту приемного конвейера
и формирования потока грунта с минимальной поперечной (по отношению к оси конвейера) скоростью, в нижней части основной поверхности желоба устраивают ступень с уменьшенным углом наклона.
20
1.2. Рабочее оборудование экскаваторов
Куски грунта, отскакивая от этой ступени, ударяются в борт приемной части конвейера и падают на ленту с практически нулевой поперечной скоростью.
При использовании в качестве приемно-питающего устройства конической внутренней поверхности самого ротора, работа перегрузочного узла на влажных, липких грунтах протекает более эффективно.
Происходит непрерывная очистка поверхности конуса от налипающей
породы боковыми неподвижными скребками, которые выполнены заодно с направляющими течками сектора разгрузки. Однако здесь угол
наклона образующей конуса к горизонту также рекомендуется принимать достаточно большим — около 60°, чтобы наклон поверхности
скребков к горизонту оставался не менее 50–55°. Устройство при простоте конструкции обеспечивает относительно равномерное распределение изменяющегося потока грунта по рабочей поверхности и равномерный износ последней.
Однобарабанный питатель эффективно используется также в комплекте с неподвижными скребками, образующими одновременно и направляющую поверхность для потока ниже барабана. Потребность
в специальном приводе усложняет и утяжеляет конструкцию, обусловливает снижение надежности устройства. Поэтому его применяют в основном на мощных экскаваторах при специальной компоновке
рабочего органа, например, для обеспечения необходимого угла наклона неподвижного желоба.
При рабочем органе с центробежной разгрузкой выгружаемая
из ковшей масса грунта подается непосредственно на приемную часть
конвейера роторной стрелы, а скорость потока согласуется со скоростью конвейерной ленты [8].
Из-за возможности значительного рассеяния выгружаемого материала под действием центробежных сил (рассеяние возможно по всей
окружности), к конструкции данного рабочего органа предъявляются
жесткие требования в отношении ориентации сектора разгрузки и запорного сектора: изменение их ориентации относительно вынимаемой стружки в зависимости от угла наклона стрелы ротора допускается
незначительным. Конструктивно выполнение этого требования достигают путем применения шарнирного соединения рамы приемной части
конвейера с основной стрелой ротора и введения специальной корректирующей тяги, которая оставляет приемную часть конвейера ориентированной на подъем материала независимо от угла наклона стрелы
21
1. Экскаваторы непрерывного действия
ротора, но при соответствующей ориентации запорного и разгрузочного секторов, изменяющих наклон к горизонту не более чем на 15°.
Роторная часть (рис. 1.10) выполнена в виде четырехгранной фермы. На балках головной части стрелы установлено роторное колесо
с приводом и барабанный питатель. Внутри полой фермы проходит
ленточный конвейер.
Цепные экскаваторы. Рабочее оборудование цепного экскаватора состоит из следующих основных узлов: ковшовой рамы, ковшового желоба, ковшовой цепи с ковшами, привода ковшовой цепи (главный привод), канатных оттяжек, лебедки подъема рамы, планирующих
звеньев и желоба, механизма натяжения ковшовой цепи, аварийного
ловителя ковшовой цепи и другого оборудования.
Ковшовая рама служит для направления движения и поддержания ковшовой цепи на всем ее пути в процессе экскавации. Ковшовые
рамы бывают однозвенные и многозвенные. Последние обеспечивают
возможность селективной разработки уступов. Ковшовые рамы снабжаются планирующими звеньями: нижними — у экскаваторов нижнего копания; верхними — у экскаваторов верхнего копания; верхними
и нижними — у полноповоротных экскаваторов верхнего и нижнего
копания.
Ковшовые рамы и их звенья изготовляют в виде пространственных ферм из профильного стального проката, полос или труб. Ковшовая рама, ее звенья и ковшовый желоб имеют между собой шарнирные соединения.
Для отклонения цепи, в узлах шарниров располагаются отклоняющие цепные барабаны, несущие поверхности которых часто футеруются сменными накладками из износостойкой стали.
Оборотные цепные барабаны, располагаемые на концах ковшовых рам, для обеспечения натяжения ковшовой цепи имеют возможность перемещения с помощью специального натяжного устройства.
Для поддержания верхней (холостой) ветви ковшовой цепи, на металлоконструкции экскаватора, желобе и ковшовой раме располагаются
поддерживающие барабаны (ролики).
Ковшовый желоб служит для направления движения ковшовой
цепи после выхода ее из забоя. В поперечном сечении он имеет форму, соответствующую условиям прохода (с определенным зазором)
ковшей и волочения ими перед собой «горки» экскавируемой породы.
22
35°
7°30'
4660
°
50
48°
Б
Б
A
6530
Рис. 1.10. Роторная часть экскаватора
13650
A
3°
1700
1.2. Рабочее оборудование экскаваторов
23
1150
1000
1. Экскаваторы непрерывного действия
Конструкция ковшей имеет вид широкой плоской чаши с круглым
днищем. Для разработки крепких пород козырьки ковшей снабжают
зубьями, а сами ковши — распорками.
Ловитель ковшовой цепи служит для предупреждения падения
последней с ковшами вниз при обрыве ее ветвей. Он устанавливается
на ковшовой раме. На поддерживающем ролике установлен рычаг с захватом. Нижний конец рычага связан с демпфирующим устройством.
Оборвавшаяся цепь, падая, попадает своим пальцем на захват, а концевой выключатель останавливает двигатели привода ковшовой цепи.
1.3. Рабочие механизмы экскаваторов
Роторные экскаваторы. К рабочим механизмам роторных экскаваторов относится механизм привода ротора, механизм подъема (поворота) стрелы ротора, механизм выдвижения стрелы и механизм поворота
(платформы). Механизмы приводов роторных экскаваторов, в отличие от механизмов одноковшовых экскаваторов, работают в тяжелых
условиях, они непосредственно подвержены климатическим воздействиям, повышенной запыленности, вибрации.
Механизм привода ротора может быть размещен на стороне ковшового колеса, внутри него или на конвейерной стороне (рис. 1.11).
Выбор местоположения привода при конструировании роторных экскаваторов определяется многими факторами, среди которых особенно важную роль играют расположение центра тяжести головки ротора (идеальное — на оси роторной стрелы) и достижение максимально
возможных углов подхода ротора к забою в вертикальной и горизонтальной плоскостях.
По схемам (рис. 1.11, а, б) с консольным расположением редуктора углы подхода к забою со стороны ротора достаточные. По схеме
(рис. 1.11, в) длина вала ротора минимальная, а углы подхода ротора
к забою наиболее благоприятные, однако при этом демонтаж редуктора затруднен.
Редуктор привода ротора выполняется преимущественно маятникого типа (одним концом редуктор насаживается на вал исполнительного органа, другим — крепится с помощью хвостовика к несущей конструкции). Дополнительная опора оборудуется упругодемпфирующей
24
1.3. Рабочие механизмы экскаваторов
подвеской (рис. 1.11, г). Подвеска обеспечивает снижение динамических явлений в приводе ротора и металлоконструкциях верхнего строения экскаватора и стабилизирует положение рабочего органа в забое.
31
аà
31
45
бá
52
52 26
64
45
26
ì
ì
ì
13
âв
гã
31
45
52
26
4
52
52
64
64
31 26
13
ì
ì
Рис. 1.11. Схемы компоновки роторного узла:
1 — упругая подвеска; 2 — вал роторного колеса; 3 — роторное колесо; 4 — конвейер;
5 — редуктор; 6 — муфта
Цепные экскаваторы. Конструкции рабочих механизмов цепных
экскаваторов аналогичны конструкциям механизмов роторных экскаваторов, кроме механизма привода ковшовой цепи.
Привод ковшовой цепи у экскаваторов с ковшами вместимостью
до 1000 л осуществляется с помощью рабочего механизма, состоя25
1. Экскаваторы непрерывного действия
щего из редуктора и электродвигателя, а у более мощных экскаваторов — из двух электродвигателей и двух последовательно расположенных редукторов. Второй редуктор (обычно планетарный) совмещается
с предохранительной муфтой. На мощных экскаваторах кроме главного привода ковшовой цепи устанавливается еще и вспомогательный, способный передвигать цепь со скоростью в 15–20 раз меньше,
чем номинальная. Этот привод необходим для осмотра, смазки и ремонта цепи.
Для предохранения цепи и ковшей от поломки при встрече с непреодолимым препятствием, в кинематическую цепь привода ковшовой
цепи всегда включается предохранительное устройство. В качестве
последнего используют роликовые, фрикционные (преимущественно
пластинчатые) муфты, муфты-тормоза с плавающей рамой и зажимными роликовыми или колодчатыми звеньями, управляемыми рычажной системой от пневмо- или гидроцилиндров [8].
1.4. Краткие сведения о траншейных роторных экскаваторах
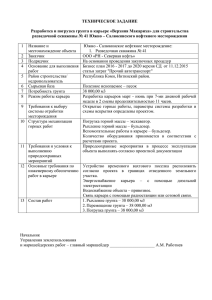
Траншейный роторный экскаватор (ЭТР, рис. 1.12) является самоходной землеройной машиной непрерывного действия [9]. Рытье
траншей с использованием ЭТР состоит из непрерывно следующих
друг за другом и совмещаемых во времени операций отделения грунта от массива, выноса его на поверхность и отсыпки в отвал (бруствер)
с одной стороны траншеи.
Первые две операции выполняются ковшами, расположенными
на вращающемся ковшовом колесе (роторе) 12 (рис. 1.12), а отсыпка
грунта в отвал — ленточным конвейером 7, расположенным во внутренней полости ротора, перпендикулярно направлению движения
экскаватора. Поступательное движение экскаватора обеспечивается
тягачом, оборудованным гусеничным движителем 1, силовой установкой 2 и кабиной 3 с системой управления. Тягач соединен с рабочим
органом с помощью шарниров и ползунов, установленных на раме 4,
позволяющих рабочему органу с помощью механизмов 5 и 6 перемещаться относительно тягача в вертикальной плоскости (при установке его в транспортное положение).
26
Рис. 1.12. Принципиальная схема роторного экскаватора
1
1.4. Краткие сведения о траншейных роторных экскаваторах
27
1. Экскаваторы непрерывного действия
Рабочий орган (ротор) установлен на раме 8 и поддерживается на ней роликами 11 и 14. Ковш рабочего органа выполнен в виде
арки прямоугольного очертания по контуру (две боковые и одна лобовая стенка) с днищем из цепных матов. Функции внутренней стенки
ковшей выполняет цилиндрический щит 13, установленный на раме
8 в передней (со стороны забоя) части ковшового колеса. При вращении ротора с одновременным перемещением всего экскаватора вперед грунт разрыхляется зубьями, установленными на лобовых стенках
ковшей, поступает в ковши и выносится им из траншеи. Грунт предохраняется от высыпания из ковшей щитом 13, который оканчивается
в начале надконвейерной зоны, где грунт под действием сил гравитации и инерции ссыпается на ленту отвального конвейера 7. Задней частью рабочий орган опирается на лыжу 9 или колеса. На задней опоре
установлен также подборный щит для зачистки дна траншеи.
Для устройства боковых стенок траншей применяют пассивные
ножевые откосники 10 (см. рис. 1.12), установленные на раме рабочего органа [10]. Срезанный откосниками грунт обрушивается вниз,
захватывается ковшами и выносится ими на поверхность.
Экскаваторы-каналокопатели, представленные на рис. 1.13 и 1.14,
применяются в ирригационном строительстве и предназначены для
сооружения каналов трапецеидального сечения в переувлажненных
грунтах.
Экскаваторы-каналокопатели помимо основного рабочего органа
роторного типа оснащаются дополнительными активными рабочими
органами (откосообразователями) в виде шнеков (рис. 1.13) или цепных устройств (рис. 1.14), оснащенных режущими зубьями или скребками [10].
В конструкциях траншейных роторных экскаваторов применяются
отвальные конвейеры: криволинейные (рис. 1.15, а) — экскаваторы малой мощности (до 80 кВт), двухсекционные (рис. 1.15, б) и дифференциальные (рис. 1.15, в) — экскаваторы средней и большой мощности
(более 80 кВт). Последний состоит из двух самостоятельных конвейеров: прямолинейного горизонтального, эвакуирующего грунт из полости ротора, и криволинейного наклонного, отсыпающего грунт в отвал.
Скорость движения ленты наклонного конвейера назначают
несколько выше скорости горизонтального, в результате чего удается
выбрать более благоприятные режимы работы системы двух конвейеров в отношении сокращения пути разгона грунта.
28
1.4. Краткие сведения о траншейных роторных экскаваторах
Рис. 1.13. Экскаватор-каналокопатель ЭТР‑206 А:
1, 7, 13, 19 — рамы соответственно тягача, поворотная, рабочего оборудования, ротора;
2 — гидробак; 3 — ходоуменьшитель; 4, 6, 11 — редукторы: раздаточный, привода ротора,
привода шнека; 5 — предохранительная муфта; 8 — гидроцилиндр; 9 — цепная передача;
10 — ротор; 12 — конвейер; 14 — задняя опора; 15, 16 — зачистные устройства за ротором
и шнеками; 17 — шнек; 18 — поддерживающий ролик; 20 — вал привода ротора
29
1. Экскаваторы непрерывного действия
6
11
9
Рис. 1.14. Экскаватор-каналокопатель ЭТР‑208:
1 — тягач; 2 — рама поворотная; 3 — устройство для подачи дренажных труб; 4 — цепная
передача; 5 — гидробак; 6 — конвейер; 7 — щит; 8 — рама ротора; 9 — задняя опора;
10 — зачистное устройство; 11 — цепной откосообразователь; 12 — ковш ротора
Технические характеристики отечественных траншейных роторных экскаваторов приведены в таблице на с. 32.
30
Контрольные задания
Рис. 1.15. Конструкции отвальных конвейеров
Контрольные задания
1. Укажите особенности конструктивных схем роторных экскаваторов радиального и продольного копания.
2. Поясните особенности конструктивной схемы роторного экскаватора типа ЭРП для разработки плотных грунтов.
3. Дайте характеристику схем основных типов роторов: камерного, полукамерного и бескамерного.
4. Поясните особенности конструктивных схем приемно-питающих устройств ротора бескамерного типа.
5. Объясните влияние условий эксплуатации (главным образом,
физико-механических свойств грунтов) на технические решения режущей части ковшей роторного экскаватора.
6. Укажите основные технические решения приемно-питающих
устройств, обеспечивающие повышение функционирования
роторного экскаватора при неблагоприятных эксплуатационных факторах (ударные нагрузки, влажные и липкие породы,
намерзание грунта).
7. Дайте общую характеристику рабочего оборудования траншейного роторного экскаватора.
31
2
Прямо­
угольник
1
ЭР 7АМ
3
ЭР 7
4
ЭР 7П
5
6
ЭР 7Т
Траншея:
профиль
1:0,3
глубина максимальная,
1,6
2,0 1,8
2,2
м
ширина по дну, м
0,8
1,2 1,4 0,85 1,7
Техническая производительность в грунтах I кате300
500
450 500
гории, м 3/ч
Силовая установка:
марка дизеля
СНД‑14А
Д‑108
мощность, кВт
75
108
частота вращения колен1700
1050
чатого вала, мин–1
Габаритные размеры
в транспортном положе8,33
10,3
11,0
11,4
нии, м:
длина
ширина
2,1
3,22
высота
3,16
3,8
4,8
Масса, т
13,0
24,5 25,8 25,0 31,2
ЭТР 162
Параметры
ЭТР 204
11,95
3,22
4,38
43,0 44,1
12,8
1500
1250
3,7
4,8 5,01
59,5 59,8
12,9 13,4
1050
В‑30Б
300
11,5
2,5
2,1
У1Д6-25ТКСЭ
250
1,8 и 2,1
Д‑160
160
1,8
2,3
14
1:0,46
13
ЭТР 253
1200
600
0,85
3,0
1:0,2
12
ЭТР 253А
800
1,5
2,2
11
1:0,27 1:0,3
10
3,25
3,2
4,24
3,05
30,0 32,8 31,5 32,5
11,1
9
ЭТР 224
1:0,32
8
ЭТР 223
650
1,2
2,0
7
ЭТР 304
Модели экскаваторов
ЭТР 231
32
ЭТР 231А
Технические характеристики отечественных траншейных роторных экскаваторов
ЭТР 254
4,2
4,35
41,0
13,45
1900
ЯМВ‑
240Б
2,4
15
1:0,27
1:0,58
1. Экскаваторы непрерывного действия
транспортные
емкость ковша, л
Отвальный конвейер:
тип
ширина ленты, м
скорость движения ленты, м/с
Ходовое оборудование:
база, м
колея, м
ширина башмака, м
Удельное давление
на грунт, Па
Скорости передвижения,
м/ч:
рабочие
число ковшей
1
Рабочий орган:
диаметр ротора по кромкам зубьев, м
частота вращения ротора, мин–1
4
16
8,4
1,42–6,12
31–310
0,253
5,1–5,8
50
3,39
2,5
0,72
80
1,62
1,43
0,4
6
7
14–
140
55
4,8
190
9,6
60
0,8
140
14
9,6
7,8
3,65 3,93 3,55
5
90 130 60
Ленточный
криволинейный
0,6
4,3
4,12
4,1 4,8
5,0
70
14
9,6
10,5
10
3,5
3
2,9
2
3,83
9
5,0
4,0
85
1,58–2,22
10–300
70
3,96
2,6
0,6
160
15
9,0 и 7,2
8
11
14
7,9
4,15
12
67
4,9
250
7,4
4,5
67
3,59
2,6
0,6
5,0
3,5
24 (в 2
ряда)
150
7,66
4,35
15
20–
350 20–509
2,3– 0,48–
6,0
5,6
90
1,2
14
4,44
2,45
0,69
13
38– 25– 0–
224
261 280
1,34– 1,07– 3,5–
3,68 3,54 5,0
65
3,86
2,5
0,72
3,38
5,0
70
160
Ленточный
двухсекционный
1,0
18
8,5
6,7
4,6
10
Окончание таблицы
Технические характеристики экскаваторов
33
2. Выбор основных параметров
2.1. Основные параметры ротора
Г
еометрические параметры экскаватора и его узлов окончательно определяются на завершающей стадии расчетов и проработки его конструкции. Однако некоторые из них предварительно задаются, поскольку они входят в расчеты в качестве исходных
данных. После выполнения расчетов и конструкторской проработки
эти параметры уточняются. Если результаты отличаются от исходных
данных более чем на 5 %, то проводится повторный расчет и конструкторская проработка.
К основным параметрам ротора относятся [10]:
1) частота вращения ротора n, мин–1;
2) диаметры ротора по режущим кромкам ковшей D0 (рис. 2.1),
беговым дорожкам D1 и наружным окружностям De опорных
колец;
3) длина зуба l, определяемая по расстоянию между режущими
кромками зуба и ковша;
4) угол резания α, определяющий наклон передней грани зуба
к касательной к траектории движения его режущей кромки;
5) ширина ковша «в свету» bк, равная расстоянию между внутренними поверхностями боковых стенок ковша;
6) количество ковшей на роторе z.
Максимальную частоту вращения ротора n определяют из условия
гравитационной разгрузки ковшей. Она связана обратной зависимостью с диаметром ротора по режущим кромкам ковшей, следователь34
2.1. Основные параметры ротора
h3 h2 h1
но, с глубиной траншеи. Для предварительных расчетов ее выбирают
из соотношения
16,819,8
n
,
H
где Н — глубина траншеи, м.
п
D0
De
H
D1
к
3
0
De
D
k
R
bk
Рис. 2.1. Схема к определению геометрических параметров ротора
35
2. Выбор основных параметров
Диаметр ротора по беговым дорожкам опорных колец D1, мм, определяют из условия возможности разработки траншеи полного профиля
(глубиной Н). При этом за геодезическую отметку дна траншеи принимают след режущих кромок ковшей в продольной плоскости симметрии ротора. В слабых грунтах глубина траншеи увеличивается за счет
срезания зачистным щитом задней опоры гребней, образованных зубьями. Кроме того, высоту «окна» h1 для прохода грунта, крупных глыб
и камней по ленте конвейера принимают равной высоте ковша hк.
В таком случае
D1 = H + h2 + h3 + ∆ + δщ + δк,
(1)
где h2 — суммарная высота барабана, ленты и рамы отвального конвейера; h3 — высота боковых балок, мм; ∆ — минимальный зазор между
продольными балками и дневной поверхностью земли, мм; δщ и δк —
толщина стенок переднего щита и ковша, мм.
Высоту h2 можно выразить через диаметр барабана dб, мм, и толщину ленты δл как
h2 = dб + 2δл + (10…20),
где 10…20 мм — зазор между нижней ветвью ленты конвейера и продольной балкой.
Диаметр барабана определяют по эмпирической зависимости
dб = (50…100)m,
где т — число прокладок в ленте.
Предварительно задают минимальное число прокладок (m = 3…5),
которому соответствует толщина ленты δл = 10…17,5 мм.
Высоту боковых балок h3 принимают от 200 (для легких и средних
моделей мощностью до 160 кВт) до 300 мм (для тяжелых моделей мощностью более 160 кВт). Зазор между боковыми балками и дневной поверхностью земли ∆ ≈ 100…150 мм. При отвальном конвейере, выполненном по схеме (рис. 2.2), вместо высоты h3 принимают h′3, примерно
равную высоте h2. Толщину стенок щита и ковша для предварительных
расчетов можно принять δщ ≈ 5…8 мм, δк ≈ 20…25 мм соответственно.
Диаметр внешней окружности опорных колец Dе, мм, назначают
из соотношения
Dе 1,141,18 D1.
36
h’3
h
2.1. Основные параметры ротора
Рис. 2.2. Вариант исполнения отвального конвейера
Нижний предел принимается для экскаваторов, предназначенных для разработки более слабых грунтов, а верхний — для более
прочных.
На ковшах траншейных роторных экскаваторов устанавливают
унифицированные зубья двух типов: длиной l = 175 мм на ЭТР малой и средней мощности и l = 196 мм на ЭТР большой мощности.
Угол резания α изменяется в зависимости от положения ковша в забое [10]. Наибольшее значение он имеет в нижней точке забоя (α ≈ 45°),
а по мере продвижения по забою вверх, он уменьшается на 4–8° в зависимости от отношения скорости подачи экскаватора к частоте вращения ротора.
Ширину ковша bк, мм, находят из соотношения
bк = B — 2 (δк + ∆З),
где В — ширина траншеи; ∆З — зазор между боковыми стенками ковша и траншеи, необходимый для работы зубчатого венца ротора без
заклинивания в траншее, мм.
Боковой зазор ∆З зависит от вылета боковых зубьев l (под вылетом
понимается в данном случае длина зуба, соответствующая расстоянию
между режущими кромками зуба и ковша) [11]. В таком случае боковой зазор ∆З приблизительно определяется на основании равенства
З l sin ,
где α — угол отклонения бокового зуба от вертикальной плоскости
(α ≈ 60°).
Диаметр ротора по режущим кромкам ковшей D0 назначают из условия выноса грунта ковшами из траншеи полного профиля [12]. Для
37
2. Выбор основных параметров
этого предварительно определяют объем грунта в разрыхленном состоянии, вынесенного из траншеи за один оборот ротора, Q, м 3,
FV k
Q = max р ,
60 n
где F — площадь поперечного сечения траншеи полного профиля, м 2;
Vmax � – максимальная скорость подачи, м/ч; kр — коэффициент разрыхления.
Площадь поперечного сечения траншеи равна сумме F1 и F2
F = F1 + F2,
где F1 — площадь поперечного сечения траншеи прямоугольного профиля, м 2,
F1 = BH ;
F2 — площадь поперечного сечения, срезаемого откосниками, м 2,
H H0 2
.
i
Здесь H0 — высота отвесной части боковых стенок (рис. 2.3), м; i — отношение высоты откоса к его заложению.
F2
XA
А
Hотв
dб
Rr
h1
h’1
Вотв
h0
h0/2
H0
D0/2
H
Вб
B
Рис. 2.3. Схема работы отвального конвейера
38
2.1. Основные параметры ротора
При ножевых откосниках высота Н0 может быть предварительно
выбрана из интервала H 0 0,350, 4 H . Отношение i для траншей
в грунтах I–II категории можно принять равным трем. В более прочных грунтах траншеи отрывают без откосов.
Максимальная скорость передвижения экскаватора обычно задается. Она составляет для современных траншейных роторных экскаваторов 250–310 м/ч. Намечается дальнейшее повышение этой скорости до 500 м/ч [10].
Коэффициент разрыхления есть отношение объема разрыхленного грунта к объему грунта той же массы в плотном теле. Значения kф
для различных грунтов приведены ниже:
Песок..........................................................1,08–1,17
Торф, растительный грунт.........................1,20–1,30
Суглинок.....................................................1,14–1,28
Глина средняя.............................................1,24–1,30
Глина тяжелая............................................1,26–1,32
Мергель, опоки...........................................1,33–1,37
Диаметр D0 определяется из уравнения
2
2
D0 к D1 щ bк k kф kн ,
4
выражающего вместимость ротора через его геометрические параметры. Здесь kγ — коэффициент использования шага ковшей; kф � — ко-
Q
эффициент формы продольной проекции ковшей; kн � — коэффициент наполнения.
Для коэффициента kγ учитывается тот факт, что между ковшами
должно сохраняться свободное пространство для беспрепятственного перемещения грунта в ковш. Этот коэффициент равен отношению
центрального угла γ n, который определяет положение поперечной балки, соединяющей опорные кольца ротора, относительно режущей
кромки предыдущего ковша к шаговому углу ковшей γ к
k n
.
к
Коэффициент kф принимается kф 0, 60, 7. Коэффициент формы
ковша (kф) учитывает снижение вместимости ковша в результате на39
2. Выбор основных параметров
клона задней стенки к траектории движения режущей кромки (угол θ),
а также конструктивные особенности задней части ковша, где для повышения эффективности разгрузки применены цепные маты. Угол θ
принимается не ниже максимальной кинематической поправки, на которую уменьшается угол резания вследствие движения режущей кромки по трохоиде. Для современных экскаваторов этот угол составляет
4–8°, а коэффициент формы ковша принимается kф 0, 650, 7 в зависимости от конструкции последнего. Меньшие значения принимаются для ковшей арочной формы, а большие — для П‑образной формы.
Коэффициент наполнения kн учитывает потери грунта по при­чине
просыпания через цепные маты на участке после выхода из забоя.
Этот же коэффициент учитывает уменьшение объема грунта, поступившего на отвальный конвейер, из-за неполной разгрузки ковшей
вследствие их залипания и т. п. В среднем коэффициент наполнения
принимают kн 0,80, 9. Меньшие значения соответствуют мелко­
фракционным сыпучим, а также липким грунтам, большие значения —
сухим кусковатым грунтам.
Количество ковшей на роторе назначается в зависимости от скорости вращения ротора при условии обеспечения полной разгрузки
ковшей [10]. На отечественных экскаваторах средней и большой мощности (более 80 кВт) устанавливается по 14 ковшей, реже — 16. В последнем случае экскаваторы предназначены для отрывки глубоких узких траншей (B / H < 0, 6). На экскаваторах малой мощности (до 80 кВт)
число ковшей может быть уменьшено до 10.
По найденным размерам вычерчивается конструктивно-расчетная схема рабочего органа: вид сбоку и поперечный разрез по ковшу
(масштаб 1:20). Кроме найденных основных параметров необходимо
принять:
1) радиус кривизны лобовой стенки ковша в поперечном сечении
R 0,80, 9 / B (см. рис. 2.1);
2) центральный угол, соответствующий длине ковша, примерно
равным γ n / 2.
40
2.2. Основные параметры отвального конвейера
2.2. Основные параметры отвального конвейера
К основным параметрам отвального конвейера относятся:
1) ширина конвейерной ленты (bл);
2) скорость движения грунта на сходе с конвейера (Vг);
3) скорость движения конвейерной ленты (Vл);
4) координаты точки схода грунта с конвейера и угол наклона траектории движения грунта в этой точке.
Ширину ленты принимают равной 0,6 м для экскаваторов малой
мощности (до 80 кВт); 0,8 м для экскаваторов средней (до 160 кВт)
и 1,0 м для экскаваторов большой (более 160 кВт) мощности.
Скорость движения грунта на сходе с конвейера (Vг) определяют
из условия обеспечения максимальной производительности конвейера [10]. Последнюю рассчитывают для максимальной скорости передвижения экскаватора (Vmax, м/ч) как
Пmax = FVmax,
где Пmax — максимальная производительность конвейера, м 3/ч.
В дальнейший расчет вводят не всю ширину ленты, а лишь ее часть
(bа), не закрытую фартуками 2 (рис. 2.4), которая принимается
bа = (0,75...0,8)bл.
3
hг
bа
1
2
bл
Рис. 2.4. Поперечное сечение отвального конвейера
41
2. Выбор основных параметров
Данное ограничение обосновано тем, что частицы грунтового потока движутся по ленте конвейера с различными скоростями в зависимости от их положения в поперечном сечении. Наибольшую скорость
имеют частицы, непосредственно соприкасающиеся с подвижной конвейерной лентой 3, а наименьшую — граничащие с неподвижными боковыми щитками 1 и фартуками 2. По мере удаления от поверхности
ленты и продольной плоскости, симметрии грунтового потока скорости его частиц убывают.
При расчете производительности ленточных конвейеров с неподвижными боковыми щитками, полное поперечное сечение грунтового потока приводят к эквивалентному, так называемому активному сечению, имеющему форму прямоугольника с основанием ba и высотой hг,
равной фактической высоте грунтового потока. Вне пределов активного сечения подвижность грунтовых частиц мала, и при расчете производительности ее не учитывают. Каждой рабочей ширине ba ленты
соответствует предельно допустимая высота hг , превышение которой
приводит к затовариванию конвейера. Обычно высоту слоя грунта (hг )
относят к выходному сечению конвейера. Ее предельные значения
не должны превышать 0,120,15 ba при скоростях движения ленты
3,0 м/с и более. При скорости 1,5–2,0 м/с высота этого слоя может
быть увеличена на 15–20 %.
При расчете производительности активное поперечное сечение
грунтового потока представляют как одно целое, а скорости всех частиц этого сечения принимают одинаковыми.
На основании изложенного скорость Vг , м/с, определяется по формуле
Vг Пmax / 3600 ba hг .
(2)
Скорость движения конвейерной ленты определяют по эмпирической зависимости
m
V л Vг ,
где λ и m — эмпирические коэффициенты.
Для криволинейных конвейеров 1, 01,1 и � m 1,151, 20 . Левые
пределы соответствуют меньшим скоростям движения ленты, а правые — большим. Для двухсекционных конвейеров показатель степени
принимается равным единице, а коэффициент � 1, 01, 2 в зависимо42
2.2. Основные параметры отвального конвейера
сти от угла наклона откидной секции ( 1520). Для дифференциальных конвейеров также m = 1, а 1, 01,1� в зависимости от угла наклона касательной к траектории движения грунтовых частиц в момент
схода с конвейера ( 2030).
Скорость V л не должна быть больше 5 м/с. Если это условие не удовлетворяется, то следует увеличить ширину ленты (bл) и повторить расчет. Однако следует помнить о том, что выбранная скорость ленты
должна удовлетворять необходимой силе трения материала о несущий
орган конвейера. Поскольку в общем случае материал поступает
на несущий орган, имеющий скорость V л , со скоростью V0, то сила трения материала о несущий орган
P G cos sin .
(3)
На пути l энергия, передаваемая материалу, будет A = Pl ; она должна быть равна его кинетической энергии K в конечный момент A �� = K
или
G
Pl V л2 V02 ,
(4)
2g
откуда
V л V02 2 gl cos sin .
(5)
Координаты точки схода грунта с конвейера и угол наклона траектории грунта в этой точке, называемые установочными размерами,
должны обеспечить такое расположение отвала относительно траншей, при котором грунт не будет осыпаться в нее, а полоса, занимаемая отвалом, будет минимальна. Эти требования должны удовлетворяться также при отрывке траншей на косогорах.
Поперечное сечение отвала формируется внутренним откосом,
который образует с горизонтальной поверхностью угол ρ (угол естественного откоса), и внешним откосом, форма которого зависит от траектории движения грунтовых частиц. Если угол наклона траектории
в точке, совпадающей с вершиной отвала, будет равен углу естественного откоса или больше его, то поперечное сечение отвала будет иметь
форму равнобедренного треугольника. Если же этот угол будет меньше
угла естественного откоса, то поперечное сечение будет ограничено
изнутри тем же откосом с углом ρ, а извне — параболой, соответствующей траектории движения частиц, либо сложной кривой, состоящей
43
2. Выбор основных параметров
из параболы в верхней части и сопрягаемой с ней прямой, наклоненной к горизонту под углом ρ в нижней части.
Из всех рассмотренных форм поперечных сечений отвала наименьшую длину основания (ширину отвала) будет иметь треугольная. При
этом на ее образование затрачивается минимум энергии в случае, когда касательная к траектории движения грунтовых частиц в точке, совпадающей с вершиной отвала, будет наклонена к горизонту под углом
естественного откоса ρ (см. рис. 2.3). Размеры поперечных сечений отвала и траншеи в этом случае будут связаны между собой зависимостью
Bотв � H отв ��� / 2 = � F K p,
(6)
где� Bотв и H отв � – соответственно высота и ширина отвала.
Для того чтобы предотвратить осыпание грунта в траншею, отвал
располагают так, чтобы между его основанием и стенкой траншеи оставалась площадка — берма. Ее ширина Bб , в соответствии с действующими строительными нормами, принимается не менее 0,5 м. В таком
случае для горизонтального (в поперечном направлении) участка расстояние от оси траншеи до вершины отвала X A , м, будет определяться так:
B
B H H0
XA Bб отв .
(7)
i
2
2
Далее необходимо подобрать такие установочные размеры, которые обеспечат при найденной ранее скорости движения конвейерной
ленты попадание частиц грунта в точку А с координатами X A и H отв при
условии, что касательная к траектории движения грунтовых частиц
в этой точке будет наклонена к горизонту под углом естественного откоса. Обычно точку схода грунта с конвейера выбирают на поверхности ленты, пренебрегая рассеиванием грунта вследствие различия траекторий точек, расположенных на различных уровнях по высоте
грунтового потока.
Задачу решают графоаналитическим методом. С этой целью вычерчивают поперечное сечение траншеи и отвала, используя для определения геометрических размеров последнего и его расположения относительно оси траншеи зависимости (6) и (7) и выбирая угол
естественного откоса из интервала 3035. На график наносят также нижнюю часть отвального конвейера, расположенную в пределах
44
2.2. Основные параметры отвального конвейера
ширины ротора. Затем строят предельную траекторию движения грунтовых частиц, удовлетворяющую указанным выше условиям ее прохождения через точку А с углом наклона касательной к траектории
в этой точке, равным углу естественного откоса ρ.
Построение траектории начинают от точки А в направлении к оси
траншеи. Данная траектория представляет собой параболу второго порядка с вертикальной осью симметрии, поэтому она будет инвариантной относительно начальной точки движения и его направления. Это
значит, что для построения требуемой траектории достаточно знать
любую принадлежащую ей точку, например А, и вектор скорости в ней
для действительного или возвратного движения.
Поскольку горизонтальная составляющая вектора скорости (V x , м/с)
сохраняет постоянное значение в течение всего времени движения, постольку это значение может быть определено из соотношения
V x Vг cos для начального момента движения. Значение скорости грунта в момент схода с конвейера (Vг ) определяется по формуле (2), а угол α принимается для нескольких положений конвейера из указанных ранее
пределов ( 2030). В начальной стадии расчета и последующего
графического решения можно ограничиться крайними значениями α,
а в дальнейшем, в случае необходимости, получить большую точность
в вычислениях. В расчете следует вести одно-два промежуточных значения из приведенного интервала. Вертикальную составляющую вектора скорости (V y , м/с) в точке А определяют для всех найденных значений А по формуле
V y V x tg.
Приняв за начало отсчета точку А и направив ось Ax1 в сторону траншеи, а ось Ay1 — вверх, по найденным парам значений V x и V y определяют точки траекторий, используя для этого уравнения движения, например, в параметрической форме,
x1 V x t;
gt 2
,
y1 V y t 2
где g — ускорение земного притяжения, м/с 2.
45
2. Выбор основных параметров
Далее точки наносят на чертеж и по ним строят искомые траектории. Количество этих траекторий будет равно количеству пар исходных значений V x и V y или количеству принятых значений α. Каждое
значение α в этом случае является параметром соответствующей траектории. На каждой из этих траекторий, левее вертикальной оси симметрии, графически находят точку, в которой угол наклона к касательной будет равен параметру α. Данная точка принимается за точку
схода грунта с конвейера, а семейство таких точек образует кривую,
на которой окончательно выбирают точку В и вычерчивают схемы отвального конвейера. При выборе точки схода грунта с конвейера (В)
отдают предпочтение такому ее положению, при котором длина конвейера и угол α будут минимальными. Эти критерии соответствуют условию минимальных энергозатрат на перемещение грунта в отвал,
а первый критерий, кроме того, — условию минимальной металлоемкости отвального конвейера.
Окончательную схему двухсекционного или дифференциального отвального конвейера следует проверить по условию перекрытия
его горизонтальной частью зоны разгрузки грунта на конвейер по ширине, которая принимается равной ширине ковша «в свету» bк . Если
данное условие не удовлетворяется, то при работе возможно «затоваривание» узла перегрузки грунта с горизонтального участка конвейера на наклонный. Это объясняется тем, что часть грунта ссыпается непосредственно из ковшей на наклонный участок и в начальный
период времени, после соприкосновения с конвейерной лентой, движется противоположно направлению последней. В схеме двухсекционного отвального конвейера проверяют, кроме того, возможность
уменьшения высоты «окна» (hi ). Расстояние от верхней точки внутренней кромки опорного кольца до поверхности ленты на наклонном участке hi' не должны быть меньше� hi . В противном случае возможно также «затоваривание» крупных кусков грунта в узле
перегрузки.
По окончательно выбранным установочным размерам отвального конвейера, в соответствии с изложенной ранее методикой, корректируется траектория движения грунтовых частиц и вычерчивается поперечное сечение отвала с нанесением на чертеж всех заданных
и найденных размеров. Схему рекомендуется вычертить под расчет-
46
2.2. Основные параметры отвального конвейера
ной схемой без поперечного сечения траншеи, но с обозначением ее
оси и кромки бермы.
При работе на косогорах изменяется как форма поперечного сечения отвала, так и траектория движения грунта [10]. Так, при поперечном уклоне в сторону траншеи, определяемом по углу β, угол наклона
внутреннего откоса к основанию уменьшится на β, а угол наружного
откоса увеличится на ту же величину. В этом случае основание отвала
треугольного поперечного сечения и его высота, измеренная по нормали к дневной поверхности земли, будут связаны между собой соотношением
B
1
1
m отв .
H отв tg tg С учетом зависимости (6) величины � Bотв и H отв определяются как
Bотв 2Fk р m;
2Fk р
H отв .
m
Найденные ранее параметры отвального конвейера необходимо
проверить на возможность отсыпки отвала с указанными размерами.
Проверку выполняют графоаналитическим методом. С этой целью
на расчетную схему (рис. 2.5) наносят верхнюю часть поперечного сечения траншеи и положение нижнего барабана наклонной части отвального конвейера (для двухсекционных и дифференциальных конвейеров) или целиком криволинейный конвейер. Задачу решают для
предельного угла поперечного наклона, равного 7°. Далее, увеличивая
угол наклона касательной к траектории движения грунта в точке схода с отвального конвейера путем изменения наклона прямолинейной
секции (или передвижением криволинейного конвейера) и принимая
за начало отсчета точку В, в соответствии с методикой строят траектории для нескольких положений конвейера.
Для определения положения отвала, соответствующего каждой
траектории, пользуются моделью поперечного сечения отвала, построенной по ранее вычисленным размерам. Основание модели перемещают по дневной поверхности грунта до совмещения вершины A с соответствующей точкой траектории. Если при этом участок траектории
ниже точки A расположится внутри отвала (траектория 1 на рис. 2.5),
то положение последнего следует принять за действительное. Если же
47
2. Выбор основных параметров
участок этой траектории будет находиться вне пределов отвала (траектория 2), то это значит, что при такой траектории внешний откос
отвала будет ограничен параболической поверхностью. Для нахождения положения отвала, соответствующего данной траектории, отвал
следует отдалить от траншеи, добиваясь равенства площадей S1 и S2,
оцениваемого визуально. В таком положении площадь поперечного
сечения отвала с параболическим внешним откосом будет равна площади треугольной модели.
S1
B1
A
1
B2
H
B
B
B
2
S2
Рис. 2.5. Поперечное сечение отвала
При выборе оптимальной траектории следует стремиться к тому,
чтобы отвал располагался по возможности ближе к траншее, а угол наклона конвейера при этом был бы минимальным. Данному условию
удовлетворяет траектория, касательная к которой в вершине отвала
будет наклонена к горизонту под углом естественного откоса. Однако это не всегда удается достигнуть либо из-за чрезмерного приближения отвала к траншее и вследствие этого осыпания в нее грунта, либо
из-за большого угла наклона конвейера, при котором его работа становится малоэффективной или невозможной. Поэтому угол наклона
конвейера к горизонту назначают не более 40°.
Учитывая, что рытье траншей на косогорах — явление не частое,
допускается образование отвалов с увеличенным основанием, чему
соответствует параболический внешний откос. При необходимости
ширина бермы (Bб ) может быть уменьшена до 200 мм. Если это требование не удовлетворяется, то следует увеличить длину наклонной части конвейера или повысить скорость движения конвейерной ленты
(на 10–20 %). При увеличенной длине конвейера корректируют расчет для случая работы без поперечных уклонов. Повышенную скорость
48
2.3. Влияние формы стружки и формы режущего органа на удельное сопротивление копанию
используют лишь для работы на косогорах. В других условиях применяется ранее установленная скорость.
Возможность работы конвейера при поперечном уклоне в сторону от траншеи проверяется аналогично возможности работы при поперечном уклоне в сторону траншеи. В таком случае берма получается увеличенной. Поэтому при решении этой части задачи ширину
бермы следует уменьшать, приближая ее к нормативному значению
� Bб = 0,� 5 м. В результате решения задачи получим фактические размеры отвала и его положение относительно траншеи, а также установочные размеры отвального конвейера.
Конечные результаты наносят на чертеж с указанием всех размеров. Допускается совмещать на графике результаты расчетов по формированию отвала для работы на горизонтальном участке и на косогорах с уклоном в сторону траншеи и от нее. При этом рекомендуется
за общую точку принять проекцию оси нижнего барабана наклонной
секции. При криволинейных отвальных конвейерах такое совмещение не рекомендуется, т. к. оно мало наглядно.
2.3. Влияние формы стружки и формы режущего органа
на удельное сопротивление копанию
Влияние толщины режущей кромки. Форма сечения стружки и характер режущего периметра оказывают существенное влияние на удельную
энергоемкость копания, что следует учитывать при расчете. Перед движущимся профилем образуется ядро уплотнения и располагаются зоны
равных напряжений (рис. 2.6, а). Ядро уплотнения исчезает при угле заострения профиля меньшем, чем угол наружного трения. Однако сопротивление внедрению и при этом остается достаточно высоким, т. к.
грунт профилем раздвигается и вдавливается в окружающий массив.
Сопротивление вдавливанию (рис. 2.6, б) будет
P2 = sbks ,
где s — толщина профиля, м; b — ширина профиля, м; ks — удельное
сопротивление вдавливанию, н/м 2.
Таким образом, сопротивление вдавливанию прямо пропорционально длине и толщине внедряемой режущей кромки. Сопротивление вдавливанию имеет место при работе ковшей экскаваторов и других рабочих
49
2. Выбор основных параметров
органов землеройных машин непрерывного действия, которые по условиям прочности выполняются достаточно толстостенными (6–30 мм).
Образующееся перед режущим клином ядро уплотнения (рис. 2.7) свидетельствует о повышении сопротивления резанию. По мере износа и увеличения толщины режущей кромки это сопротивление увеличивается.
а
б
Рис. 2.6. Расположение ядра и изобар напряжений перед движущимся
в грунте профилем:
а — при горизонтальном перемещении; б — при вдавливании
Рис. 2.7. Расположение ядра уплотнения перед затупленным режущим клином
Износ и затупление режущей кромки рабочего органа приводят
к появлению усилия нормального к направлению движения, которое
выталкивает рабочий орган из массива грунта. Выталкивающее усилие
локализуется усилием напора, действующим на рабочий орган со сторон машины. Увеличение напорных усилий вызывает повышение износа на режущей кромке, который начинает быстро увеличиваться.
Учитывая изложенное, необходимо при конструировании рабочих органов землеройных машин непрерывного действия стремиться
к уменьшению толщины режущих кромок и повышению их износо­
устойчивости путем применения высокопрочных материалов и наплавок, а также обеспечения самозатачивания кромки при износе.
50
2.3. Влияние формы стружки и формы режущего органа на удельное сопротивление копанию
Влияние угла резания и заднего угла на сопротивление резанию. С увеличением угла резания сопротивление резанию возрастает. При значении угла до 35° это возрастание идет медленно, а при дальнейшем
увеличении угла резания — быстро. Следует, однако, иметь в виду,
что грунт по рабочей поверхности режущего клина должен подняться на некоторую высоту для того, чтобы заполнить ковш или другое
транспортирующее устройство. При чрезмерно малых углах резания
путь перемещения грунта увеличивается, что приводит к увеличению
призмы волочения и дополнительным потерям на трение грунта о рабочий инструмент. Кроме того, необходимо, чтобы, во избежание трения на нижней кромке режущего клина, обеспечивался задний угол резания δ = 5…8°, а угол заострения самой режущей кромки удовлетворял
условиям прочности. Сочетание перечисленных требований в процессе проектирования рабочих органов землеройных машин непрерывного действия, как правило, приводит к выбору углов резания в пределах α = 25…35°.
Соотношение между длиной режущей кромки и площадью сечения
стружки. Чем меньше длина режущей кромки по сравнению с площадью вырезаемого сечения, тем ниже удельное сопротивление копанию. С увеличением абсолютных размеров срезаемой стружки, чему
соответствуют более высокая производительность и большая емкость
ковшей, площадь сечения пропорциональная квадрату линейных размеров растет быстрее, чем длина режущей кромки, прямо пропорциональная линейным размерам. При этом соотношение между длиной
режущей кромки и площадью сечения снижается.
Н. Г. Домбровским [11] показано, что при увеличении емкости ковша одноковшового экскаватора 0,15–15 м 3, удельное сопротивление
копанию в одинаковых грунтах снижается на 25–30 %.
Экспериментальные исследования ВНИИстройдормаша (Харута Н. Я., Капустин М. И., Селинов В. П. Дорожные машины. Теория, конструкция и расчет : учебник для вузов. Л. : Машиностроение, Ленингр. отд-ние, 1976. С. 84) показали, что при увеличении
сечения стружки в 3 раза, удельное сопротивление копанию снижается на 30–40 %. Таким образом, при выборе режимов работы землеройной машины непрерывного действия необходимо стремиться
к резанию стружками возможно больших сечений при минимальной
длине режущей кромки.
51
2. Выбор основных параметров
Влияние скорости резания на сопротивление резанию. Обычными
для землеройных машин непрерывного действия являются скорости
резания 0,5–2,0 м/с. В указанных пределах существенного изменения
удельного сопротивления копанию не наблюдается, если сохраняются
равные сечения снимаемых стружек. При увеличении скоростей резания до 6–9 м/с, что имеет место на ротационных рабочих органах
с инерционным выбросом грунта, энергоемкость процесса копания
существенно возрастает (на 30–50 %).
С увеличением рабочих скоростей при равных геометрических
размерах рабочего органа, его производительность возрастает прямо
пропорционально скорости. Это обеспечивает компактность и малую
массу рабочего органа и машины в целом. При выборе рабочих скоростей должны оцениваться все эти факторы.
Влияние формы стружки на сопротивление резанию. Различают три
формы сечения стружки: блокированную, вырезаемую по трем граням;
полублокированную, вырезаемую по двум граням; деблокированную,
вырезаемую по одной грани. Степень влияния деблокирования стружки на уменьшение удельного сопротивления резанию наиболее полно
отражена в работе А. Н. Зеленина [12].
Влияние деблокирования стружки на сопротивление резанию
Форма
стружки
Эскиз
b = 22 см
Рх, кГ
%
b = 39 см
Рх, кГ
%
b = 90 см
Рх, кГ
%
Блокированная
300
700
100
100
315
740
100
100
530
100
Полублокированная
190
450
64
64
270
550
74
75
480
91
Деблокированная
110
240
37
34
190
415
53
56
420
80
Примечание. В числителе — данные для стружки толщиной h = 7,5 см, в знаменателе — для h = 15 см.
52
2.3. Влияние формы стружки и формы режущего органа на удельное сопротивление копанию
Из приведенных в таблице на с. 52 данных и на основании производственных испытаний ряда машин следует, что деблокирование
стружки существенно снижает удельное сопротивление резанию. При
этом чем меньше ширина стружки по сравнению с высотой, тем больше оказывается ее деблокирование.
Экскаваторы послойного резания, как правило, разрабатывают
грунт полублокированными стружками. Режим их работы следует выбирать таким, чтобы соотношение между шириной и толщиной снимаемой стружки было 1–2.
Влияние расстановки зубьев на сопротивление копанию. Зубья на режущей кромке устанавливаются для создания опережающего сдвига
и разрыхления грунта. Установка зубьев дает положительные результаты на плотных и невязких грунтах. В сыпучих или вязких грунтах
установка зубьев может дать отрицательные результаты. Способствуя
снижению сопротивления резанию плотных, скалывающихся грунтов,
зубья вместе с тем ухудшают условия перемещения грунта в ковш, т. к.
разрыхленный грунт образует большую призму волочения. Увеличиваются также площади и усилия трения.
Так, по данным Домбровского [11], установка зубьев снижает удельное сопротивление резанию на 10–25 % и удельное сопротивление копанию только на 6–15 %. По экспериментальным данным А. Н. Зеленина [12], удельное сопротивление резанию при установке зубьев может
снижаться на 30–40 %. В эксплуатационном отношении установка зубьев имеет то преимущество, что износ режущей кромки ковша при этом
существенно снижается, а зубья, подверженные повышенному износу, выполняются быстросменными из износоустойчивых материалов.
Профиль зуба показан на рис. 2.8, а. При данном расположении
зуба глубина прорезаемой им борозды
h0 l � sin 1 ,
2
где β — угол заострения зуба, градус; γ1 — задний угол зуба, градус; l —
длина зуба, м.
Расположение зубьев на режущей кромке показано на рис. 2.8, б.
Если учесть, что плоскость сдвига грунта располагается под углом ψ
близким к 45°, то расстояние между зубьями для изображения износа
режущей кромки должно составлять b0 ≈ 2h0.
53
2. Выбор основных параметров
Ширина зубьев b определяется по условиям прочности, т. к. при
расчете необходимо учитывать возможность реализации полного тягового усилия на одном зубе, встретившемся с препятствием.
б
ψ
α
β
γ1
β
2
h0
δ
l
b0 b
h0
а
в
α1
Рис. 2.8. Расположение зубьев на режущей кромке ковша:
а — профиль зуба; б, в — расположение зубьев на двух смежных ковшах
Соотношение расстояния между зубьями к ширине зубьев рекоb
мендуется принимать 0 = 1, 2...1, 25 [11].
b
Очевидно, длину зуба, глубину борозды, расстояние между зубьями
и толщину зубьев следует принимать в зависимости от размеров ковша и величины возможного усилия, действующего на зуб, [14].
На многоковшовых экскаваторах зубья на ковшах располагают
в шахматном порядке (см. рис. 2.8, б, в). При этом зубьями последующего ковша снимают выступы, оставшиеся после прохода предыдущего ковша, чем достигается наибольшее деблокирование резания
и наибольший эффект от применения зубьев.
Влияние формы режущей кромки. Режущие кромки различной формы (прямые, заостренные, полукруглые, с зубьями и без зубьев) были
исследованы Д. И. Федоровым [14]. Исследования показали преимущества полукруглой режущей кромки (рис. 2.9), у которой режущий
периметр средней своей частью вынесен вперед. Плавные очертания
полукруглой режущей кромки способствуют свободному прохождению грунта по рабочей поверхности, без образования призмы волочения. Особенно эффективно в этом отношении постепенное увеличение радиуса рабочей поверхности, что обеспечивает расширение
потока грунта и отсутствие его смятия.
54
Контрольные вопросы
Рис. 2.9. Ковш с полукруглой режущей кромкой системы Д. И. Федорова
Полукруглая режущая кромка дает возможность использовать
прочность режущего органа и выполнять его более тонким, чем при
прямоугольном сечении. Эта форма кромки также способствует лучшему внедрению ковша в грунт и образованию организованного потока грунта. Исследования показали, что применение полукруглой
режущей кромки без зубьев может дать экономию по удельной энергоемкости до 20–25 % [15].
Контрольные вопросы
1. От каких параметров зависит максимальная частота вращения
ротора?
2. Как изменяется угол резания α в зависимости от положения
ковша в забое?
3. Что относится к основным параметрам отвального конвейера?
4. Поясните, какие размеры при расчете отвального конвейера
относятся к категории установочных.
5. Назовите основные факторы, влияющие на удельное сопротивление копанию.
6. Укажите основные этапы графоаналитического метода для
определения взаимного расположения отвала и траншеи.
7. Назовите основные формы сечения стружки.
55
3. Общий расчет экскаватора
3.1. Определение мощности привода ротора
В
процессе разработки траншеи, мощность двигателя ротора (при многомоторном приводе) или соответствующая составляющая суммарной мощности (при одномоторном приводе) расходуется на преодоление следующих видов сопротивления:
1) отделение грунта от забоя;
2) разгон грунта до скорости перемещения ковшей;
3) подъем грунта на высоту выгрузки;
4) внутреннее трение в трансмиссии.
При работе с откосниками увеличивается объем грунта, выносимого ковшами, что учитывается при расчете мощности на преодоление
трех последних видов сопротивления. Собственно отделение грунта
от забоя откосниками учитывается при расчете мощности, затрачиваемой на передвижение экскаватора [10].
Мощность, расходуемую на преодоление сопротивлений отделению грунта от забоя, рассчитывают по следующей методике.
Сначала определяют силы сопротивления грунта копанию, считая
их, как и по теории одноковшовых экскаваторов, приложенными к режущим кромкам зубьев. Эти силы раскладываются на касательные
P01, кН, и нормальные составляющие P02, кН (по отношению к траекториям движения режущих кромок зубьев). Углы наклона касательных к этим траекториям и к окружности ротора по кромкам зубьев
незначительно отличаются друг от друга, поэтому можно приближенно считать, что составляющая � P01 направлена по касательной, а P02 —
56
3.1. Определение мощности привода ротора
по нормали к окружности ротора радиуса Rср , определяемого как среднестатистический радиус по кромкам зубьев с учетом их износа.
Указанные величины определяются по формулам:
P01 kF bc;
P02 P01, (8)
где kF — удельное сопротивление грунта копанию, кПа; b и с — ширина и толщина стружки, м; ξ — коэффициент пропорциональности.
Удельное сопротивление kF вычисляют из соотношения
A1
,
c
принимая значения удельного сопротивления копанию k1 и коэффициент A1 по таблице.
kF k1 Категория
грунта
1
2
3
4
5
6
7
Грунты
k1, кПа
Песок, супесь, мягкий и средний влажный и раз70–230
рыхленный суглинок без включений
Суглинок без включений, гравий мелкий и сред210–390
ний, мягкая влажная или разрыхленная глина
Суглинок плотный, глина средняя, крепкая, влажная или разрыхленная; очень мягкие аргиллиты
370–590
и алевролиты
Суглинок крепкий со щебнем или галькой, глина
крепкая и очень крепкая влажная, уголь мягкий,
540–790
конгломерат очень слабоцементированный
Сланцы средние, глина крепкая сухая плотная
спондиловая, лес плотный отвердевший, мел,
790–980
гипс, уголь, опоки, мергель, песчаники очень мягкие, руда фосфоритовая марганцевая мягкая
Ракушечник, известняк мягкий пористый, мел,
сланцы, мергель и гипс средней крепости, уголь
980–2160
крепкий
Сланцы, мергель, мел и гипс крепкие, известняк
1960–5890
средней крепости, песчаник мягкий, мерзлые грунты
А1,
кН/м
1,1
2,8
3,5
4,4
5,9
7,8
9,8
Вторым слагаемым в этой формуле является влияние толщины
стружки на сопротивление грунта копанию, которая для траншейных
роторных экскаваторов не превышает 0,035 мм на ковш.
57
3. Общий расчет экскаватора
Составляющие силы сопротивления P01 и P02 определяют по расчетному сечению стружки. Расчетное сечение соответствует стружке, которую снимал бы ковш со сплошной (без зубьев) режущей кромкой
при одинаковых фактической частоте вращения ротора и его подаче
(скорости передвижения) и одинаковом расчетном радиусе Rср .
Ширина стружки расчетного сечения принимается равной ширине траншеи
b = B,
а толщина с определяется по приближенной зависимости
c c0 sin ,
где c0 — подача на ковш, м; γ — угол, определяющий положение ковша, градус (рис. 3.1).
c0
Рис. 3.1. Схема к определению толщины стружки
Подача на ковш с0 — это путь перемещения экскаватора за время,
в течение которого ротор повернулся на угол γк — шаговый угол ковшей. Если, например, в некоторый момент времени режущие кромки
двух смежных ковшей находились в положениях соответственно А и В,
58
3.1. Определение мощности привода ротора
то при повороте ротора на угол γк, режущая кромка второго ковша займет положение А. За то же время экскаватор переместится по горизонтали на расстояние c0, а рассматриваемый ковш займет положение B1.
Величина c0 , м, определяется через угол γк, рад, частоту вращения
ротора n, об/мин, и скорость подачи Vп, м/ч, по зависимости
кVп
V
п ,
120 n 60 nz
где к 2 / z (здесь z — количество ковшей на роторе).
Значение c0 определяют для расчетной скорости подачи Vп . Далее
по рабочей формуле, в которой все величины, кроме функции sin γ,
имеют количественное значение, определяют касательную, составляющую сопротивление грунта копанию P01, см,
c0 P01 B k1c0 sin A1 .
Методика определения нормальной составляющей этого сопротивления будет дана в п. 3.3.
Средний радиус по режущим кромкам зубьев Rср , м, определяется
по формуле
Rср R0 kL RЗ,
D0
lр cos ;
2
� kL = L / B . Здесь L — длина дуги поперечного профиля дна траншеи, м,
R
L = RЗ arcsin
,
2RЗ
где
R0 где RЗ Rk l р cos ; � lр — расчетная длина зуба, равная конструктивной
длине l, уменьшенной на половину предельного износа, соответствующего длине металлокерамических твердосплавных пластинок, напаянных на передние грани зубьев. Для экскаваторов малой и средней
мощности lр ≈ 0,16 м, для экскаваторов большой мощности lр ≈ 0,18 м.
По найденным P01 и Rср определяют работу А, кДж, одного ковша
на дуге γ З, рад, забоя
З
A Rср P01d ;
0
59
3. Общий расчет экскаватора
2H � З arccos 1 .
D0 За один оборот ротора такую же работу выполнит каждый из z ковшей. Следовательно, суммарная работа всех ковшей, установленных
на роторе, кВт, за один оборот последнего составит
A Az .
Среднюю мощность N1р, кДж, расходуемую на отделение грунта
от забоя, определяют по формуле
A n
.
60
Мощность, расходуемая на сообщение грунту скорости, равна кинетической энергии, которая затрачивается на изменение скорости
от нуля до значения окружной скорости грунта в ковшах. Эта мощность рассчитывается по формуле
N 1р ПVог2
,
2 3600 1000
где П — производительность экскаватора, м 3/ч, П = FVп; ψ — объемная масса грунта, кг/м 3 (данные приведены ниже); Vог — окружная скорость грунта в ковшах, определяемая по центру его тяжести для одного ковша, м/с.
N 2р Группы
Пески, супески, растительный слой, чернозем, торф без корней
Легкие суглинки, мелкий гравий, песок со щебнем
Средние глины, крупный гравий, тяжелые суглинки
Тяжелые глины, мергель, опоки, мягкие меловые породы
Объемная
масса ψ, кг/м 3
1100–1500
1600–1900
1600–1900
1600–2000
Значение Vог определяется по формуле
nRг
,
30
где Rг — радиус ротора по центру тяжести грунта в ковше, м,
Vог Rг 60
D1 D0
.
4
3.1. Определение мощности привода ротора
Фактические затраты мощности N 2р будут несколько выше расчетных вследствие того, что часть грунта, срезаемая ножевыми откосниками и обрушаемая в нижнюю часть траншеи, имеет отрицательную начальную скорость, а не нулевую, как принято в расчете. Однако, из-за
малости этой величины, в предварительных расчетах ею пренебрегают.
Далее определяют мощность, расходуемую на преодоление гравитационных сил, которые препятствуют перемещению грунта из его
положения, соответствующего моменту начала взаимодействия с ковшами, в положение выгрузки.
За начальное положение частиц грунта средней прямоугольной части траншеи следует считать их естественное положение в забое [10].
Центр тяжести поперечного сечения этой части траншеи располагается на уровне Н/2 от дна (или верха) траншеи, а среднее вертикальное перемещение грунта в положении выгрузки H р′ , м, будет
D0
H
Rг .
2
2
Для грунта, срезаемого ножевыми откосниками, за начальное положение следует считать то, в которое он переходит в результате обрушения на дно траншеи. Приближенно можно считать, что обрушенный грунт распределяется равномерно по дну траншеи слоем h0, м,
H р F2 kр
.
B
В таком случае среднее вертикальное перемещение этой части
грунта в положении выгрузки H р′′ , м, определяется из соотношения
h0 =
D0
h
Rг 0 .
2
2
Среднее вертикальное перемещение, приведенное ко всему поперечному сечению траншеи H р , м, составит
H H р F1 H рF2
.
F
Мощность, затрачиваемая на подъем грунта в положении выгрузки, N 3р , кВт, будет
ПgH р
N 3р ,
3600 1000
где g — ускорение земного притяжения (g = 9,81 м/с 2).
Hр 61
3. Общий расчет экскаватора
Потери на внутреннее трение трансмиссии учитываются по коэффициенту полезного действия ηр, который подсчитывается для всей
кинематической цепи ротора по общим нормам машиностроения. Коэффициенты полезного действия открытой зубчатой передачи «приводной вал — зубчатые венцы ротора» (ηзр) и опорно-направляющего
устройства (ηор) принимаются соответственно ηзр = 0,92 и ηор = 0,94.
Суммарная мощность привода ротора N р, кВт, определяется как
Nр N 1р N 2 р N 3 р
р
.
(9)
3.2. Определение мощности привода отвального конвейера
Мощность привода отвального конвейера расходуется на преодоление следующих видов сопротивления:
1) сообщение грунту скорости;
2) подъем грунта на высоту выгрузки;
3) трение грунта о боковые щитки;
4) трение грунта по грунту в зонах боковых щитков;
5) трение фартуков о ленту;
6) трение о ленту очистных устройств;
7) внутреннее трение в трансмиссии.
Разгруженный из ковшей грунт поступает на отвальный конвейер
с некоторой конечной скоростью, которая снижается до нуля за счет
демпфирующего сопротивления конвейерной ленты. Далее, под действием сил трения между лентой и грузом, скорость последнего увеличивается от нуля до Vг . Затрачиваемая на это мощность равна приращению кинетической энергии за единицу времени, необходимой
для изменения скорости в указанных пределах,
Пmax Vг2
N 1к ,
2 3600 1000
— максимальная производительность отвального конвейе-
где Пmax
ра, м 3/ч.
В процессе движения по конвейеру грунт перемещается в вертикальном направлении на высоту � H к , которая определяется как раз62
3.2. Определение мощности привода отвального конвейера
ность высотных отметок точек схода грунта с конвейера и поступления его на конвейер. Высота � H к определяется по расчетной схеме.
Мощность N 2к, кВт, затрачиваемая на подъем грунта на высоту � H к ,
определяется по следующей формуле:
Пmax gH к
.
3600 1000
При использовании двухсекционных или дифференциальных конвейеров, высота � H к определяется по второму (наклонному или кривоN 2к линейному) конвейеру.
Потери мощности на трение грунта о боковые щитки, а также трение грунта о грунт в зонах боковых щитков определяются по эмпирической зависимости
k П2 V
N 3к 3 max л ,
3600 1000
где k3 — коэффициент трения грунта о сталь.
Сопротивление сил трения фартуков о ленту зависит от жесткости
фартуков, высоты слоя грунта, находящегося над фартуками, а также
от массы грунта на ленте конвейера, ограниченной шириной ba. Фартуки выполняют функции уплотнителей между лентой и боковыми
щитками, их изготовляют из бельтинга или транспортерной ленты,
а при установке на конвейер изгибают так, чтобы горизонтальная часть
была прижата к ленте (см. рис. 2.4). Чем жестче материал фартука, тем
с большим усилием последний прижимается к ленте, а следовательно, тем больше будут силы трения между неподвижными фартуками
и подвижной лентой. Сила прижатия фартуков к ленте увеличивается с высотой слоя грунта, находящегося над фартуками и оказывающего на них давление. Напротив, грунт, расположенный на ленте
по ширине ba, в пролетах между барабанами и промежуточными опорами будет отжимать ленту от фартуков.
Потери мощности на трение фартуков о ленту N 4 к, кВт, определяются по зависимости
N 4к P4 V л,
где P4 — потери окружного усилия на трение ленты о фартуки, кН.
Величину P4, кН, можно определять по следующей эмпирической
зависимости:
63
3. Общий расчет экскаватора
P4 1,5
Пmax
.
3600Vг ba
Сопротивление очистных устройств при правильной их регулировке незначительно, а поэтому на стадии предварительных расчетов
мощности оно не учитывается.
Потери мощности на трение в трансмиссии, а также потери на трение в подшипниках промежуточных опор и натяжного барабана учитываются в соответствии с коэффициентом полезного действия ηк,
определяемым по общим нормам машиностроения.
Полная мощность привода отвального конвейера определится как
Nк N 1к N 2 к N 3 к N 4 к
.
к
(10)
3.3. Тяговый расчет
Для сообщения экскаватору поступательного движения применяется тягач, соединенный с рабочим органом специальным сцепным
устройством. В рабочем состоянии рабочий орган опирается в задней
части на колесо или лыжу (полуприцепная схема), а в транспортном
положении он может перемещаться за тягачом либо с опорой на колесо (полуприцепная схема), либо в поднятом над землей состоянии (навесная схема). Во всех случаях рабочий орган пригружает тягач в месте соединения с ним.
Усилия пригрузки определяют из условия равновесия сил, действующих на рабочий орган. К ним относятся:
1) сопротивление грунта копанию;
2) сопротивление резанию грунта ножевыми откосниками;
3) сила тяжести рабочего органа, включающего отвальный конвейер, раму и заднюю опору;
4) сила тяжести грунта, находящегося в ковшах и на отвальном
конвейере;
5) сопротивление передвижению задней опоры;
6) сила тяги и вертикальная реакция тягача в месте его соединения с рабочим органом.
64
3.3. Тяговый расчет
Как и прежде, сопротивление грунта копанию представляют как
P01 и P02, распределенные по всем ковшам, которые находятся в забое.
За расчетное принимается положение ротора, при котором отклонение от вертикали составляет угол з к / 2 (рис. 3.2), что примерно
соответствует средней мощности привода ротора. Принимая этот ковш
за начальный, остальные ковши располагают по забою с интервалом,
равным шаговому углу γ к . Усилия P01 и P02 вычисляют согласно положению ковша в забое и расчетной скорости подачи. Коэффициент ψ
выбирают из интервала 0, 60, 9� для талых грунтов и 0, 91, 2� для
мерзлых. Для нижней части забоя принимаются меньшие, а для верхней части большие значения ψ. Силы � P01 и P02 приложены к режущим
кромкам на расстоянии Rср от оси вращения ротора.
Сопротивление резанию грунта ножевыми откосниками раскладывают на горизонтальную X 0, H, и вертикальную Y0, H, составляющие и определяют их по эмпирическим зависимостям:
для I и II категории грунта X 0 = 33,8F20,79;
для III и IV категории грунта X 0 = 196F20,6;
Y0 X 0 ctg 1 ,
где λ — угол установки откосников в продольном направлении; ρ1 —
угол трения грунта об откосник, 1 2030.
Y
X
G
Y
W
P
P
(i)
λ
X
X0
Y0
Gк
Gро
(i)
λ 3- λ к 2
G (i)
Y
X
Рис. 3.2. Схема к определению тягового усилия роторного экскаватора
в рабочем режиме
65
3. Общий расчет экскаватора
Последняя из этих зависимостей дана для откосников, установленных верхними концами вперед. Такой установке отдают предпочтение, поскольку в этом случае вертикальная составляющая сопротивления грунта резанию способствует обрушению грунта. В таком
случае угол ρ1 принимают с обратным знаком.
Сопротивления X 0 и Y0 как составляющие равнодействующих сил,
распределенных по длине откосников, считают приложенными в точке на уровне центра масс грунта, обрушаемого откосниками.
Силу тяжести рабочего органа в приближенных расчетах считают
приложенной в поперечной плоскости, проходящей через ось вращения ротора, в точке, находящейся на уровне продольных балок рамы.
Силу тяжести грунта G, Н, определяют для каждого ковша по формуле
Gi gBhi ,
где hi — высота положения режущих кромок зубьев i‑го ковша.
Силы Gi прикладываются в центре масс каждого ковша.
Силу тяжести грунта, находящегося на конвейере, определяют
с учетом грунта, размещаемого вне активной зоны. Площадь поперечного сечения заполненного конвейерного желоба Fтр, м 2, при угле наклона боковых щитков к ленте, равном 60°, определяется как
Fтр bл hг 0,58hг 0,120,15 ba.
(11)
Площадь же активной зоны грунтового потока будет
Fa = ba hг .
(12)
После совместного решения уравнений (11), (12), путем исключения высоты грунтового слоя, получим
Fтр bл
Fa 0,58Fa 0,120,15 .
ba
(13)
Суммируя левую и правую части зависимости (13) по длине конвейера и умножая результат на объемную массу грунта в разрыхленном состоянии ψ р и на ускорение свободного падения g, приходят к зависимости
Gк 66
bл
Ga 0,58Ga 0,120,15 ,
ba
(14)
3.3. Тяговый расчет
где Ga — силы тяжести грунта, находящегося в активной зоне, Н,
Ga р g Fa dLк .
Lк
Здесь Lк — длина конвейера, м.
Объем грунта активной зоны, определяемый по производительности конвейера Пmax по грунту в разрыхленном состоянии и времени
нахождения грунта на конвейере tк , с, рассчитывается по формуле, м 3,
F dL
a
к
Lк
Пmax tк
.
3600
Время tк , с, определяют из условия равноускоренного движения
грунта из состояния покоя до скорости Vг на длине� Lк
tк =
2Lк
.
Vг
С учетом изложенного рассчитывают Ga , Н, как
Ga Пmax р gLк
1800Vг
.
Далее определяют Gк по формуле (14). Эту силу считают приложенной также в плоскости поперечной симметрии ротора (см. рис. 3.2),
ординату точки приложения определяют графически по рис. 2.1.
После нанесения всех сил на расчетную схему, из условия равенства нулю суммы моментов относительно точки подвеса ротора к тягачу находят реакцию задней опоры. Отношение ее составляющей
X 30 / Y30 принимают равным 0,1 для каждой колесной опоры и 0,4 для
опоры в виде лыжи. За точку приложения сил X 30 и Y30 принимают середину контактного участка на глубине Н от дневной поверхности земли. Все линейные размеры определяют по расчетной схеме.
С помощью построения силового многоугольника находят реакции тягача X т и Yт .
На следующем этапе тягового расчета экскаватора мысленно отделяют ротор от тягача, заменяя его действие на последний силами X т′
и Yт′ , равными силам X т и Yт соответственно, но направленными противоположно им.
67
3. Общий расчет экскаватора
Реакции тягача X т и Yт и соответствующие им усилия X т′ и Yт′
определяют также для случая работы на уклоне, принимая значение
его предельного угла равным в среднем 7°. Расчет выполняют по изложенной выше методике с учетом изменения направления сил тяжести.
Результаты вычислений для случая работы на горизонтальном
участке используют для расчета мощности привода механизма хода
при одномоторном приводе, а для случая работы на уклонах — при
расчете мощности механизма хода с индивидуальным приводом, а также при определении необходимого тягового усилия по сцеплению
движителя с почвой.
Необходимое тяговое усилие тягача равно сумме проекций всех
действующих сопротивлений на направление движения. К ним относятся:
1) сопротивление рабочего органа (X т′ и Yт′ );
2) сопротивление тягача самопередвижению (Wт );
3) сопротивление подъему (Wп).
Вторая составляющая сопротивлений WT определяется по формуле
Wт f Gт Yт cos,
(15)
где f — коэффициент сопротивления самопередвижению; Gт — сила
тяжести тягача, Н; β — угол продольного подъема, градус.
Значения коэффициента f принимают в пределах 0,13–0,15 для супесей; 0,14–0,18 для тяжелых супесей и мягких суглинков и 0,20–0,25
для жирных глин.
Сопротивление подъему, Н, равно горизонтальной составляющей
силы Gт, Н,
Wп Gт sin.
Общее сопротивление W, Н, равное тяговому усилию T, Н, определяется по формуле
W T X т Wт Wп.
Тяговое усилие и нормальная реакция почвы должны находиться
между собой в таких соотношениях, при которых обеспечено надежное сцепление опорной поверхности движителя с почвой. Это условие записывается в виде
T
w
w .
(16)
Gт Yт cos
68
3.3. Тяговый расчет
Величина w называется коэффициентом сцепления [15]. Его допустимые значения [w] для различных грунтов приведены ниже:
Сухая грунтовая дорога..............................0,8–1,0
Луг, поросший травой (сухой)...................0,9–1,0
Свежевспаханный грунт............................0,7–0,8
Слежавшаяся пахота..................................0,7–0,8
Грязная грунтовая дорога..........................0,5–0,7
Песок влажный..........................................0,5–0,6
Песок сухой................................................0,4–0,5
Зимняя дорога............................................0,3
Если условие (16) не удовлетворяется, то следует либо увеличить
массу тягача за счет балластировки, либо уменьшить угол β. В последнем случае, при необходимости работать на уклонах, дополнительное
тяговое усилие обеспечивается с помощью лебедки или другого тягача, работающего в сцепе с основным тягачом экскаватора.
Мощность привода ходового механизма N хр , кВт, в случае одномоторного привода определяется по тяговому усилию
N хр T0Vп
,
3600 1000х
(17)
где T0 — значение Т, Н, при 0; ηх — коэффициент полезного действия трансмиссии ходового механизма.
В формулу (17) входит расчетная скорость подачи Vп , м/ч. При работе на уклонах происходит перераспределение мощности двигателя
между отдельными исполнительными органами (ротором, отвальным
конвейером и ходовым механизмом). Экскаватор в таком случае передвигается на пониженных скоростях. При использовании многомоторного привода, мощность N хр подсчитывают также по формуле (17),
заменяя в ней T0 на T . Однако для окончательного выбора двигателя
хода следует выполнить, кроме того, тяговый расчет для транспортного режима, которому, как правило, соответствуют большие потери
мощности из-за повышенных скоростей передвижения. Мощность
привода хода в транспортном режиме определяют и для экскаваторов
с одномоторным приводом. Однако данный расчет является лишь проверочным, т. к. на привод хода в этом случае может быть расходована
вся мощность двигателя.
69
3. Общий расчет экскаватора
Тяговый расчет для транспортного режима выполняют по ранее изложенной методике с изменениями, которые приводятся ниже. В расчетной схеме рабочий орган представляют поднятым над землей. Задняя опора может быть оторвана от земли (лыжная конструкция) или
установлена на землю (колесная опора). В первом случае рабочий орган соединен с тягачом по навесной схеме, а во втором — по полуприцепной.
На рабочий орган действует только сила собственной тяжести,
а при опирании на заднюю опору — еще и реакция опоры [10]. В последнем случае расчет реакций тягача X т и Yт и весь последующий расчет выполняют по изложенной выше методике.
Мощность двигателя проверяют для двух случаев: при движении
по горизонтальному пути на второй транспортной скорости и при движении на подъем (до 15°) на первой транспортной скорости. Транспортные скорости принимают обычно равными соответствующим
скоростям трактора, на базе которого изготовляется тягач. При недостаточной мощности снижают транспортные скорости.
Y
X
G
Y
Gк
X
Gро
W
Рис. 3.3. Схема к определению тягового усилия роторного экскаватора
в транспортном режиме с навесным рабочим оборудованием
При транспортировании по навесной схеме (рис. 3.3) следует учитывать усилие PВ в точке А подвески рамы рабочего органа. Это усилие
определяется из условий равенства нулю суммы моментов сил, действующих на рабочий орган, относительно точки А. Остальные реак70
3.4. Выбор силового оборудования
ции находят путем построения силового многоугольника. Дальнейший расчет отличается от приведенного следующим:
1) во все формулы величины X т′ и Yт′ подставляют с учетом их
знаков;
2) усилие PВ раскладывают на две составляющие — касательную
(по направлению движения экскаватора) и нормальную. Во всех
последующих формулах первую приплюсовывают к X т′ , а вторую — к Yт′ . Как и прежде, мощность рассчитывают для двух
случаев — при движении на горизонтальном участке на второй
транспортной скорости и на подъем (до 15°) на первой транспортной скорости.
3.4. Выбор силового оборудования
Траншейные роторные экскаваторы оборудуются автономным одномоторным или многомоторным (индивидуальным) приводом. В качестве двигателя одномоторного привода применяют дизель, энергия
вращательного движения от которого передается через механическую
трансмиссию на привод ротора, отвального конвейера и ходового механизма. Многомоторный привод может быть дизель-электрическим или
комбинированным. При дизель-электрическом приводе силовая установка состоит из дизеля и генератора переменного тока. Последний
преобразует механическую энергию коленчатого вала дизеля в электрическую и по кабелям передает ее к электродвигателям, установленным на исполнительных механизмах (роторе, отвальном конвейере,
ходовом механизме). В конструкциях отечественных ЭТР применяют
генераторы типа ГС и ГСС и электродвигатели серии АО и АОП. Дизель — гидравлический привод, состоит из дизеля, насосной установки и соединенных с ней с помощью трубопроводов и гибких рукавов
высокого давления гидромоторов и гидроцилиндров, установленных
в приводе исполнительных механизмов. В чистом виде в ЭТР дизельгидравлический привод не применяется.
При комбинированном приводе часть исполнительных механизмов приводится в движение электродвигателями, а часть — гидродвигателями или непосредственно от дизеля через механическую транс71
3. Общий расчет экскаватора
миссию. Возможен также комбинированный привод одного и того же
механизма. Так, например, ходовой механизм экскаваторов ЭТР 204,
ЭТР 223, ЭТР 224 и ЭТР 253 в рабочем (тяговом) режиме приводится
в движение гидравлическими двигателями, а в транспортном режиме — непосредственно от дизеля через систему механических передач.
При многомоторном приводе силовое оборудование для каждого
исполнительного механизма выбирается по найденным ранее наибольшим мощностям, определяемым по формулам (9) для привода ротора,
(13) для привода отвального конвейера и в соответствии с указаниями
подгл. 3.3 для привода ходового механизма.
При использовании дизель-электрического привода или комбинированного с электрическим, генератор выбирают по сумме мощностей, потребляемых электрическими двигателями. Если в состав суммарной мощности входит мощность ходового механизма, то эту сумму
подсчитывают с учетом рабочего передвижения (тяговый режим) экскаватора. Она не должна быть меньше мощности, расходуемой на передвижение экскаватора в транспортном режиме. В противном случае генератор выбирают по последней мощности.
Дизель во всех случаях выбирают по суммарной мощности N, кВт,
N N р N к N хр ,
которая также не должна быть меньше мощности транспортного хода.
Контрольные вопросы и задания
1.
2.
3.
4.
5.
Какие сопротивления возникают в процессе разработки траншеи?
Определите ширину срезаемой стружки.
Дайте характеристику основных типов грунтов.
Назовите основные этапы тягового расчета.
Как определить мощность, затрачиваемую на подъем грунта
в положении выгрузки?
6. Укажите, какие силы необходимо учесть при определении усилия пригрузки тягача.
7. Дайте общую характеристику основных типов привода траншейного роторного экскаватора.
72
4. Пример расчета
роторного траншейного экскаватора
4.1. Выбор основных параметров
1. Исходные данные.
Ниже приведен численный пример применительно к роторному
траншейному экскаватору при следующих данных:
1) количество ковшей на роторе n =14� (на отечественных экскаваторах средней и большой мощности устанавливается
по 14 ковшей);
2) максимальная глубина копания H = 2 м;
3) ширина по дну B = 1, 2 м;
4) конвейер двухсекционный.
2. Максимальная частота вращения ротора п
16,819,8 18, 0
9 мин 1 .
2
H
3. Диаметр ротора по беговым дорожкам D1 по формуле (2) составит
n
D1 = H + h2 + h3 + ∆ + δщ + δк =
= 2000 + 400 + 220 + 125 + 6 + 22 = 2773 мм,
где h2 — суммарная высота барабана, ленты и рамы отвального конвейера, мм; h3 — высота боковых балок, мм; ∆ — минимальный зазор
между продольными балками и дневной поверхностью земли, мм; δщ
и δк — толщина стенок переднего щита и ковша, мм.
73
4. Пример расчета роторного траншейного экскаватора
Диаметр барабана
dб 100 � m 100 4 400 мм,
где m — число прокладок в ленте (m 35).
Суммарная высота барабана h2 будет
h2 dб 2 л 1020 540 2 14 15 583 мм,
где л 1017,5 мм.
Принимаем h3 = 220 мм [от 200 (для легких и средних моделей мощностью до 160 кВт) до 300 мм (для тяжелых моделей мощностью более
160 кВт)]. Зазор между боковыми балками и дневной поверхностью
земли ∆ ≈ 100 … 150 мм. Толщину стенок щита и ковша можно принять равными соответственно δщ ≈ 5 …8 мм, δк ≈ 20 …25 мм.
4. Диаметр внешней окружности опорных колец Dе составит
Dе 1,141,18 D1 1,16 2773 3217 мм.
Нижний предел принимается для экскаваторов, предназначенных
для разработки более слабых грунтов, а верхний — для более прочных.
5. Принимаем унифицированные зубья длиной l = 175 мм (ЭТР
малой и средней мощности).
6. Принимаем угол резания а ≈ 45°. Угол резания а изменяется
в зависимости от положения ковша в забое. Наибольшее значение он
имеет в нижней точке забоя (а ≈ 45°), а по мере продвижения по забою вверх, он уменьшается на 4–8° в зависимости от отношения скорости подачи экскаватора к частоте вращения ротора.
7. Ширина ковша
bк = B — 2 (δк + ∆З) = 1,2 – 2 ∙ (0,022 + 0,092) = 0,972 м,
где В — ширина траншеи, м; ∆З — зазор между боковыми стенками
ковша и траншеи, необходимый для работы зубчатого венца ротора
без заклинивания в траншее, мм.
Боковой зазор ∆З обеспечивается необходимым вылетом боковых
зубьев
З l sin 175 sin 60 92 мм,
где — угол отклонения бокового зуба от вертикальной плоскости
( 60).
74
4.1. Выбор основных параметров
8. Диаметр ротора по режущим кромкам ковшей D0 назначают
из условия выноса грунта ковшами из траншеи полного профиля. Для
этого предварительно определяют объем грунта в разрыхленном состоянии, вынесенного из траншеи за один оборот ротора,
2,88 300 1, 2
1, 92 м3,
60 n
60 9
где F — площадь поперечного сечения траншеи полного профиля, м 2;
Vmax — максимальная скорость подачи 250–300 м/ч; kр � — коэффициент
разрыхления (Vmax — отношение объема разрыхленного грунта к объему грунта той же массы в плотном теле. Его значения для различных
грунтов приведены в подгл. 2.1), kр = 1, 2� .
Площадь поперечного сечения траншеи определяется как
Q
FVmax kр
F � F1 F2 2, 4 0, 48 2,88 м2,
где F1 — площадь поперечного сечения траншеи прямоугольного профиля
F1 BH 1, 2 2 2, 4 м2;
F2 — площадь поперечного сечения, срезаемого откосниками, м 2,
H H0 2
2 0,8
2
0, 48 м .
i
3
Здесь H0 — высота отвесной части боковых стенок, м; i — отношение
высоты откоса к его заложению.
При ножевых откосниках высота H 0 выбрана из интервала
H 0 0,350, 4 H . Отношение i для траншей в грунтах I–II категории
F2
2
можно принять равным трем. В более прочных грунтах траншеи отрывают без откосов.
Диаметр D0 определяется из уравнения (16), выражающего геометрическую вместимость ротора через его геометрические параметры,
2
2
D0 к D1 щ bк k kф kн ,
4
где kγ — коэффициент использования шага ковшей; kф � — коэффициент
формы продольной проекции ковшей; kн � — коэффициент наполнения.
Коэффициент kγ учитывает тот факт, что между ковшами должно
сохраняться свободное пространство для беспрепятственного переме-
Q
75
4. Пример расчета роторного траншейного экскаватора
щения грунта в ковш. Этот коэффициент равен отношению центрального угла γ n, определяющего положение поперечной балки, которая
соединяет опорные кольца ротора, относительно режущей кромки
предыдущего ковша (� к / 2 1251), к шаговому углу ковшей к 2542,
k n 1251
0,5.
к 2542
Коэффициент kф принимается равным 0,6–0,7. Коэффициент kф
принимается равным kф 0, 60, 7. Коэффициент формы ковша kф учитывает снижение вместимости ковша вследствие наклона задней стенки к траектории движения режущей кромки (угол θ), а также закругления в задней части ковша, где для повышения эффективности
разгрузки применены цепные маты. Угол θ принимается не ниже максимальной кинематической поправки, на которую уменьшается угол
резания вследствие движения режущей кромки по трохоиде. Для современных экскаваторов этот угол составляет 4–8°, а коэффициент
формы ковша принимается равным kф 0, 650, 7 в зависимости от конструкции последнего.
Коэффициент наполнения kн учитывает потери грунта вследствие
просыпания его через цепные маты на участке после выхода из забоя,
а также уменьшение объема грунта, поступившего на отвальный конвейер, из-за неполной разгрузки ковшей вследствие их залипания
и т. п. В среднем коэффициент наполнения принимают равным 0,8–
0,9. Меньшие значения соответствуют мелкофракционным сыпучим,
а также липким грунтам, большие значения — сухим кусковатым грунтам. Получим
2
Q 4
D0 D1 щ к bк k kф kн
1, 92 4
2
2, 773 0, 007 0, 022 4,14 м.
3,14 0, 972 0,5 0, 65 0,85
По найденным размерам вычерчивается конструктивно-расчетная схема рабочего органа: вид сбоку и поперечный разрез по ковшу
(масштаб 1:20). Кроме найденных основных параметров рекомендуется принять радиус кривизны лобовой стенки ковша в поперечном
сечении Rк 0,80, 9 / B . Меньшие значения принимаются для ковшей арочной формы, а большие — для П‑образной.
76
4.2. Выбор основных параметров отвального конвейера
4.2. Выбор основных параметров отвального конвейера
1. К основным параметрам отвального конвейера относятся:
1) ширина конвейерной ленты (bл);
2) скорость движения грунта на сходе с конвейера (Vг );
3) скорость движения конвейерной ленты (V л );
4) координаты точки схода грунта с конвейера и угол наклона траектории движения грунта в этой точке (α).
2. Принимаем ширину ленты 0,8 м (для экскаваторов средней
(до 160 кВт) мощности).
3. Скорость движения грунта на сходе с конвейера (Vг ) определяют из условия обеспечения максимальной производительности конвейера. Последнюю рассчитывают для максимальной скорости передвижения экскаватора (Vmax , м/ч) как
Пmax FVmax 2,88 300 864 м 3/ч.
В дальнейший расчет вводят не всю ширину ленты, а лишь ее часть
b
( a), не закрытую фартуками,
ba 0, 750,8 bл 0, 750,8 0,8 0, 60, 64 � м.
Принимаем ba = 0, 62 м.
Данное ограничение обосновано тем, что частицы грунтового потока движутся по ленте конвейера с различными скоростями в зависимости от их положения в поперечном сечении. Наибольшую скорость имеют частицы, непосредственно соприкасающиеся
с подвижной конвейерной лентой, а наименьшую — граничащие
с неподвижными боковыми щитками и фартуками. По мере удаления
от поверхности ленты и продольной плоскости, симметрия грунтового потока скорости его частиц убывает. При расчете производительности ленточных конвейеров с неподвижными боковыми щитками,
полное поперечное сечение грунтового потока приводят к эквивалентному по производительности — так называемому активному сечению.
Активное сечение имеет форму прямоугольника с основанием ba и высотой hг , равной фактической высоте грунтового потока. Вне пределов активного сечения подвижность грунтовых частиц мала, и при рас77
4. Пример расчета роторного траншейного экскаватора
чете производительности ее не учитывают. Каждой ширине � b� a
(рабочей ширине ленты) соответствует предельно допустимая высота
hг , превышение которой приводит к затовариванию конвейера. Обычно высоту слоя грунта (hг ) относят к выходному сечению конвейера.
Ее предельные значения не должны превышать 0,120,15 ba при скоростях движения ленты 3,0 м/с и более
hг 0,120,15 0, 62 0, 0740, 093 м.
Принимаем hг = 0, 080 м.
При расчете производительности активное поперечное сечение
грунтового потока представляют как одно целое, а скорости всех частиц этого сечения принимают одинаковыми.
На основании изложенного скорость рассчитывается так:
Vг Пmax
864
4,839 м/с.
3600ba hг 3600 0, 62 0, 080
4. Скорость движения конвейерной ленты определяют по эмпирической зависимости
V л Vг 1, 2 4,8391 5,8 м/с,
m
где λ и m — эмпирические коэффициенты.
Выбран двухсекционный конвейер. Принимаем λ = 1,2 и m = 1 (для
двухсекционных конвейеров показатель степени принимается равным
единице, а коэффициент 1, 0..1, 2 — в зависимости от угла наклона
откидной секции а = 15…20°).
Скорость V л не должна быть больше 5 м/с. Это условие не удовлетворяется — увеличиваем ширину ленты (bл) и повторяем расчет.
Принимаем bл = 1 м, следовательно, ba = 0, 77 м; hг = 0, 092 м;
864
Vг 3,39 м/с;
3600 0, 77 0, 092 V л Vг 1, 2 3,391 4, 0 м/с < 5,0 м/с.
m
5. Из всех форм поперечных сечений отвала наименьшую длину
основания (ширину отвала) будет иметь треугольная. При этом на ее
образование затрачивается минимум энергии в случае, когда касатель78
4.2. Выбор основных параметров отвального конвейера
ная к траектории движения грунтовых частиц в точке, совпадающей
с вершиной отвала, будет наклонена к горизонту под углом естественного откоса ρ. Размеры поперечных сечений отвала и траншеи в этом
случае будут связаны между собой по зависимости
Bотв � H отв ��� / 2 = � F K p ,
где� Bотв и H отв � – соответственно высота и ширина отвала, м.
Для того чтобы предотвратить осыпание грунта в траншею, отвал располагают так, чтобы между его основанием и стенкой траншеи
оставалась площадка — берма. Ее ширина Bб в соответствии с действующими строительными нормами принимается не менее 0,5 м, тогда
для горизонтального (в поперечном направлении) участка расстояние
от оси траншеи до вершины отвала X A , м, будет
B
B H H0
Bб отв .
2
2
i
Далее необходимо подобрать такие установочные размеры, которые обеспечат при найденной ранее скорости движения конвейерной
ленты попадание частиц грунта в точку А с координатами X A и H отв при
условии, что касательная к траектории движения грунтовых частиц
в этой точке будет наклонена к горизонту под углом естественного
откоса. Обычно точку схода грунта с конвейера выбирают на поверхности ленты, пренебрегая рассеиванием грунта вследствие различия
траекторий точек, расположенных на различных уровнях по высоте
грунтового потока.
Эту задачу решаем графоаналитическим методом: вычерчиваем
поперечное сечение траншеи и отвала, используя для определения геометрических размеров последнего и его расположения относительно оси траншеи зависимости (14) и (15) и принимая угол естественного откоса 32 ( 3035).
XA tg следовательно,
⇒ Bотв
2H отв
B
� �
� � H отв отв tg ,
Bотв
2
Bотв Bотв
� tg FK p 2 2
4 FK p
4 2,88 1, 4
= 5,01 м.
tg tg 32
79
4. Пример расчета роторного траншейного экскаватора
2 2,88 1, 2
1,379 м.
5, 01
Bотв
1, 2 2 0,8
5, 01
XA 0,5 4, 005 м.
2
3
2
Значение скорости грунта в момент схода с конвейера (Vг ) определяем по формуле (13), а угол α принимаем для нескольких положений
конвейера из указанных ранее пределов (α = 20…30°). Примем 4 варианта угла α: α1 = 20°, α2 = 23°, α3 = 26°, α4 = 30°. Результаты расчета приведены в табл. 4.1. Согласно ранее описанной методике находим скорости V x ,�V y и координаты x, y для четырех значений угла. Далее
строим траектории частиц грунта (рис. 4.1), на каждой из них, левее
вертикальной оси симметрии, графически находим точку, в которой
угол наклона к касательной будет равен параметру α. Эта точка принимается за точку схода грунта с конвейера, а семейство таких точек
образует кривую, на которой окончательно выбираем точку B. Вычерчиваем схему отвального конвейера. При выборе точки схода грунта
с конвейера (B) отдаем предпочтение такому ее положению, при котором длина конвейера и угол α будут минимальными. Эти критерии
соответствуют условию минимальных энергозатрат на перемещение
грунта в отвал, а первый критерий, кроме того, — условию минимальной металлоемкости отвального конвейера.
6. При работе на косогорах изменяется как форма поперечного сечения отвала, так и траектория движения грунта. Принимаем поперечный уклон косогора в сторону траншеи равным максимальному
значению угла β = 7°. Угол наклона внутреннего откоса к основанию
уменьшится в этом случае на β, а угол наружного откоса увеличится
на ту же величину. В результате этого основание отвала треугольного поперечного сечения и его высота, измеренная по нормали к дневной поверхности земли, будут связаны между собой по соотношению
H отв m
2FK p
Bотв
1
1
1
1
3,38.
H отв tg tg tg 32 7 tg 32 7 С учетом зависимости (6) величины � Bотв и H отв определяются
по формулам:
Bотв 2Fkр m, 2 2,88 1, 2 3,38 4,83 м;
H отв 80
2Fkр
m
2 2,88 1, 2
1, 43 м.
3,38
Путь разгона,
м, min
Sp = V л2/(2μg)
Vмax г
формула (5)
t = 0,90 с
t = 0,60 с
t = 0,30 с
t = 0,15 с
Расчетные
параметры
Vх =
= Vг соsα, м/с
Vy =
= Vх tg ρ, м/с
Таблица 4.1
Sp = 42/(2 ∙ 0,7 ∙ 9,8) = 1,17
α — угол наклона траектории движения грунта к горизонту в точке схода с конвейера
α1 = 20°
α2 = 23°
α3 = 26°
α4 = 30°
Vх = 3,39 соs 20° =
Vх = 3,39 соs 23° =
Vх = 3,39 соs 26° =
Vх = 3,39 соs 30° =
= 3,18
= 3,12
= 3,07
= 2,96
Vy = 3,18 tg 32° =
Vy = 3,12 tg 32° = 1,95
Vy = 3,07 tg 32° = 1,92
Vy = 2,96 tg 32° = 1,85
= 1,99
x1 = Vх t, м; y1 = Vy t — gt 2/2
x1 = 3,18 ∙ 0,15 = 0,48
x1 = 3,12 ∙ 0,15 = 0,47
x1 = 3,07 ∙ 0,15 = 0,46;
x1 = 2,96 ∙ 0,15 = 0,44;
y1 = 1,99 ∙ 0,15 —
y1 = 1,95 ∙ 0,15 —
y1 = 1,92 ∙ 0,15 —
y1 = 1,85 ∙ 0,15 —
— (9,8 ∙ 0,15 2/2) = 0,19
— (9,8 ∙ 0,15 2/2) = 0,18
— (9,8 ∙ 0,15 2/2) = 0,18
— (9,8 ∙ 0,15 2/2) = 0,17
x2 = 3,18 ∙ 0,30 = 0,95
x2 = 3,12 ∙ 0,30 = 0,94;
x2 = 3,07 ∙ 0,30 = 0,92;
x2 = 2,96 ∙ 0,30 = 0,89;
y2 = 1,99 ∙ 0,30 —
y2 = 1,95 ∙ 0,30 —
y2 = 1,92 ∙ 0,30 —
y2 = 1,85 ∙ 0,30 —
— (9,8 ∙ 0,30 2/2) = 0,16
— (9,8 ∙ 0,30 2/2) = 0,14
— (9,8 ∙ 0,30 2/2) = 0,14
— (9,8 ∙ 0,30 2/2) = 0,11
x3 = 3,18 ∙ 0,60 = 1,91
x3 = 3,12 ∙ 0,60 = 1,87;
x3 = 3,07 ∙ 0,60 = 1,84;
x3 = 2,96 ∙ 0,60 = 1,78;
y3 = 1,99 ∙ 0,60 —
y3 = 1,95 ∙ 0,60 —
y3 = 1,92 ∙ 0,60 —
y3 = 1,85 ∙ 0,60 —
— (9,8 ∙ 0,60 2/2) = –0,57 — (9,8 ∙ 0,60 2/2) = –0,59 — (9,8 ∙ 0,60 2/2) = –0,61 — (9,8 ∙ 0,60 2/2) = –0,65
x4 = 3,18 ∙ 0,90 = 2,86
x4 = 3,12 ∙ 0,90 = 2,81;
x4 = 3,07 ∙ 0,90 = 2,76;
x4 = 2,96 ∙ 0,90 = 2,66;
y4 = 1,99 ∙ 0,90 —
y4 = 1,95 ∙ 0,90 —
y4 = 1,92 ∙ 0,90 —
y4 = 1,85 ∙ 0,90 –
— (9,8 ∙ 0,90 2/2) = –2,18 — (9,8 ∙ 0,90 2/2) = –2,2 — (9,8 ∙ 0,90 2/2) = –2,24 — (9,8 ∙ 0,90 2/2) = –2,3
(2,87 2 + 2 ∙ 9,8 ∙ 3 ∙ (0,7 × (2,87 2 + 2 ∙ 9,8 ∙ 3 ∙ (0,7 × (2,87 2 + 2 ∙ 9,8 ∙ 3 ∙ (0,7 × (2,87 2 + 2 ∙ 9,8 ∙ 3 ∙ (0,7 ×
× cos 20° –sin 20°)) 1/2 = × cos 23° — sin 23°)) 1/2 = × cos 26° — sin 26°)) 1/2 = × cos 30° — sin 30°)) 1/2 =
= 5,18
= 4,81
= 4,41
= 3,8
Результаты расчета оптимальных установочных размеров отвального конвейера
(работа экскаватора на горизонтальной поверхности)
4.2. Выбор основных параметров отвального конвейера
81
Рис. 4.1. Расчетная схема отвального конвейера (α = 20°) при работе экскаватора на горизонтальной поверхности
4. Пример расчета роторного траншейного экскаватора
82
Рис. 4.2. Расчетная схема отвального конвейера (α = 13°) при работе экскаватора на косогоре при поперечном уклоне
в сторону к траншее
4.2. Выбор основных параметров отвального конвейера
83
4. Пример расчета роторного траншейного экскаватора
Далее находим скорости V x ,� V y и координаты x, y траектории полета грунта x, y для двух значений угла α, представленных в табл. 4.2.
Таблица 4.2
Результаты расчета оптимальных установочных размеров отвального конвейера
(работа экскаватора на косогоре)
Расчетные
параметры
Vх = Vг соsα, м/с
Vy = Vх tg ρ, м/с
t = 0,15 с
t = 0,30 с
t = 0,60 с
t = 0,90 с
α1 = 13°
α2 = 27°
Vх = 3,39 соs 13° = 3,3
Vх = 3,39 соs 27° = 3,02
Vy = 3,3 tg 32° = 2,06
Vy = 3,02 tg 32° = 1,89
2
x1 = Vх t, м; y1 = Vy t — gt /2
x1 = 3,3 ∙ 0,15 = 0,5; y1 =
x1 = 3,02 ∙ 0,15 = 0,45; y1 =
= 2,06 ∙ 0,15 –
= 1,89 ∙ 0,15 –
— (9,8 ∙ 0,15 2/2) = 0,2
— (9,8 ∙ 0,15 2/2) = 0,17
x2 = 3,3 ∙ 0,30 = 1; y2 =
x2 = 3,02 ∙ 0,30 = 0,91; y2 =
= 2,06 ∙ 0,30 –
= 1,89 ∙ 0,30 –
— (9,8 ∙ 0,30 2/2) = 0,18
— (9,8 ∙ 0,30 2/2) = 0,13
x3 = 3,3 ∙ 0,60 = 1,98; y3 =
x3 = 3,02 ∙ 0,60 = 1,81; y3 =
= 2,06 ∙ 0,60 –
= 1,89 ∙ 0,60 –
— (9,8 ∙ 0,60 2/2) = –0,53
— (9,8 ∙ 0,60 2/2) = –0,63
x4 = 3,3 ∙ 0,90 = 2,97; y4 =
x4 = 3,02 ∙ 0,90 = 2,72; y4 =
= 2,06 ∙ 0,90 –
= 1,89 ∙ 0,90 –
— (9,8 ∙ 0,90 2/2) = –2,12
— (9,8 ∙ 0,90 2/2) = –2,27
В результате сравнения двух вариантов, по аналогии с предыдущим расчетом находим, что отвальный конвейер (с расчетными параметрами) удовлетворяет возможности отсыпки отвала с найденными
размерами при значении угла наклона разгрузочной секции конвейера α1 = 13°. Соответствующая расчетная схема отвального конвейера
представлена на рис. 4.2.
4.3. Определение мощности привода
Мощность, расходуемую на преодоление сопротивлений отделению грунта от забоя, рассчитывают по следующей методике.
1. Определяют силы сопротивления грунта копанию, считая их,
как и по теории одноковшовых экскаваторов, приложенными к ре84
4.3. Определение мощности привода
жущим кромкам зубьев. Эти силы раскладываются на касательные P01,
кН, и нормальные составляющие P02, кН (по отношению к траекториям
движения режущих кромок зубьев). Углы наклона касательных к этим
траекториям и к окружности ротора по кромкам зубьев незначительно отличаются друг от друга, и поэтому можно приближенно считать,
что составляющая � P01 направлена по касательной, а P02 — по нормали
к окружности ротора радиуса Rср , определяемого как среднестатистический радиус по кромкам зубьев с учетом их износа.
Указанные величины определяются по формулам:
P01 kF bc;
P02 P01,
где kF — удельное сопротивление грунта копанию, кПа; b и с — ширина и толщина стружки, м; ξ — коэффициент пропорциональности.
Удельное сопротивление kF вычисляют из соотношения
A1
3,5 103
450 103 550 � кПа,
35 10 3
c
принимая значения удельного сопротивления копанию k 1 =
= 370...590 кПа и коэффициент A1 = 3,5� кН / м по табл. 3.1 для III категории грунта. Второе слагаемое в этой формуле учитывает влияние
толщины стружки на сопротивление грунта копанию, которая для
траншейных роторных экскаваторов не превышает 0,035 м на ковш.
Составляющие силы сопротивления � P01 и P02 рассчитывают по приведенной толщине стружки (постоянной величины). За расчетную модель принимается стружка, которую снимал бы ковш сплошной (без
зубьев) режущей кромкой при одинаковых с фактическими частоте
вращения ротора, его подаче (скорости передвижения) и одинаковом
расчетном радиусе Rср .
kF k1 Ширина стружки в нашей расчетной модели принимается равной
ширине траншеи
b = B,
а толщина с определяется по приближенной зависимости
c c0 sin 0, 036 sin 90 36 10 3 � м,
где c0 — подача на ковш, м; γ — угол, определяющий положение ковша.
85
4. Пример расчета роторного траншейного экскаватора
Подача на ковш с0
кVп
V
300
п 0, 036 м,
120 n 60 nz 60 9, 9 14
где к 2 / z (здесь z — количество ковшей на роторе).
c0 По зависимости (9) определим
� P01 kF bc 550 1, 2 36 10 3 23, 76 кН;
P02 P01 0,8 23, 76 19, 01 кН.
Средний радиус по режущим кромкам зубьев определяется следующим образом:
D0
4, 055
lр cos 0,16 cos 45 2,15 м;
2
2
RЗ Rk lр cos 0,85B 0,16 cos 45 0,85 1, 2 0,16 cos 45 1,14 м,
R0 где � lр — расчетная длина зуба, равная конструктивной длине l, уменьшенной на половину предельного износа, который соответствует
длине металлокерамических твердосплавных пластинок, напаянных
на передние грани зубьев. Для экскаваторов малой и средней мощности lр ≈ 0,16 м, для экскаваторов большой мощности lр ≈ 0,18 м,
L 0, 63
� k=
=
= 0,525.
L
B 1, 2
Длина дуги поперечного профиля дна траншеи
L RЗ arcsin
тогда
1, 2
R
1,14 arcsin
0, 63 м,
2RЗ
2 1,14
Rср R0 kL RЗ 2,15 0,525 1,14 1,55 м.
Работа одного ковша на дуге забоя составит
З
8923 '
0
0
A Rср P01d 1,55
1, 2 450 0, 036 sin 3,5 d 53, 79 кДж;
2H 22 З arccos 1 arccos 1 1,56� рад 8923 '.
D0 4, 055 86
4.3. Определение мощности привода
За один оборот ротора такую же работу выполнит каждый из z ковшей. Следовательно, суммарная работа всех ковшей, установленных
на роторе, за один оборот последнего будет
A Az 53, 79 14 753, 06� кДж.
Средняя мощность, расходуемая на отделение грунта от забоя,
A n 753, 06�
112, 96� кВт.
60
60
2. Мощность, расходуемая на сообщение грунту скорости, будет
N1р П Vог2
864 1700 1, 612
N 2р 0,53� кВт,
2 3600 1000
2 3600 1000
где П — производительность экскаватора,
П FVп 2,88 300 864 м 3/ч;
ψ — объемная масса грунта, 16001900 кг/м 3. Принимаем
1700� � кг/м 3 (см. табл. 3.2); Vог — окружная скорость грунта в ковшах,
определяемая по центру его тяжести для одного ковша, м/с,
nRг 3,14 9 1, 707
1, 61 м/с.
30
30
Здесь Rг — радиус ротора по центру тяжести грунта в ковше, м,
Vог D1 D0 2, 773 4, 055
1, 707 м.
4
4
3. Далее определяют мощность, расходуемую на преодоление гравитационных сил, препятствующих перемещению грунта из его положения, соответствующего моменту начала взаимодействия с ковшами, в положение выгрузки.
За начальное положение частиц грунта средней, прямоугольной
части траншеи следует принимать их естественное положение в забое.
Центр тяжести поперечного сечения этой части траншеи располагается на уровне Н/2 от дна (или верха) траншеи, а среднее вертикальное перемещение грунта в положение выгрузки будет
Rг H р D0
H 4, 055
2
Rг
1, 707 2, 73 м.
2
2
2
2
87
4. Пример расчета роторного траншейного экскаватора
Для грунта, срезаемого ножевыми откосниками, начальное положение следует считать тем, в которое он переходит в результате обрушения на дно траншеи. Приближенно можно считать, что обрушенный грунт распределяется равномерно по дну траншеи слоем
0, 48 1, 2
0, 48 м.
1, 2
B
В таком случае среднее вертикальное перемещение этой части
грунта в положение выгрузки определяется из соотношения
h0 F2 kр
D0
h 4, 055
0, 48
3,5 м.
Rг 0 1, 707 2
2
2
2
Среднее вертикальное перемещение, приведенное ко всему поперечному сечению траншеи, составит
H р H р F1 H рF2
2, 73 2, 4 3,5 0, 48
2,86� м.
2,88
F
Мощность, затрачиваемая на подъем грунта, в положении выгрузки будет
ПgH р
864 1700 9,8 2,86
N 3р 11, 43 кВт.
3600 1000
3600 1000
4. Потери на внутреннее трение трансмиссии учитываются коэффициентом полезного действия ηр, который подсчитывается для всей
кинематической цепи ротора по общим нормам машиностроения.
Коэффициенты полезного действия открытой зубчатой передачи
«приводной вал — зубчатые венцы ротора» (ηзр) и опорно-направляющего устройства (η ор) принимаются соответственно зр 0, 92
Hр и ор 0, 94 .
5. Суммарная мощность привода ротора N р, кВт, определяется как
Nр 88
N 1р N 2 р N 3 р
р
112, 96 0,53 11, 43
144, 45 кВт.
0, 92 0, 94
4.4. Определение мощности привода отвального конвейера
4.4. Определение мощности привода отвального конвейера
1. Разгруженный из ковшей грунт поступает на отвальный конвейер с некоторой конечной скоростью, которая снижается до нуля за счет
демпфирующего сопротивления конвейерной ленты. Далее под действием сил трения между лентой и грузом скорость последнего увеличивается от нуля до Vг . Затрачиваемая на это мощность равна приращению кинетической энергии за единицу времени, необходимой для
изменения скорости в указанных пределах,
Пmax Vг2
864 1700 3,342
2, 28� кВт.
2 3600 1000
2 3600 1000
2. В процессе движения по конвейеру грунт перемещается в вертикальном направлении на высоту � H к , которая определяется как разность высотных отметок точек схода грунта с конвейера и поступления его на конвейер. Высота � H к , м, определяется по расчетной схеме.
Мощность, затрачиваемая на подъем грунта на высоту � H к , определяется по следующей формуле:
N1к Пmax gH к 864 1700 9,8 0,8
3, 2 кВт.
3600 1000
3600 1000
3. Потери мощности на трение грунта о боковые щитки, а также
трение грунта о грунт в зонах боковых щитков составят
N 2к 2
k3 Пmax
V л 0,8 8642 3,34
0,554 кВт.
3600 1000
3600 1000
4. Потери мощности на трение фартуков о ленту
N 3к N 4 к P4 V л 1, 4 4 5, 6 кВт,
где P4 — потери окружного усилия на трение ленты о фартуки, кН,
определяют по формуле
P4 1,5
Пmax
864
1,5 1, 4 кН.
360 3,34 0, 77
360Vг ba
5. Полная мощность привода отвального конвейера
Nк N1к N 2 к N 3к N 4 к 2, 28 3, 2 0,554 5, 6
14,54 кВт.
0,8
к
89
4. Пример расчета роторного траншейного экскаватора
4.5. Тяговый расчет
1. Сопротивление грунта копанию представляем в виде двух составляющих P01 и P02 (рис. 4.3), распределенных по всем ковшам, которые находятся в забое. За расчетное принимается положение ротора, при ко
2543
7631,
тором вертикали отклоняются на угол з к 8923 2
2
что примерно соответствует средней мощности привода ротора. Принимая этот ковш за начальный, остальные ковши располагают по забою с интервалом, равным шаговому углу к 2543. Усилия P01 и P02
вычисляют согласно положению ковша в забое и расчетной скорости
подачи.
Xт
Yт
Xт
Gk
Yт
P01(1)
P02(1)
G1
Y0
P01(2)
P02(2)
G ро
X0
G2
P01(3)
P02(3)
G4
G3
P01(4)
P02(4)
Y30
X30
Рис. 4.3. Схема сил, действующих на ротор в рабочем режиме
Коэффициент ψ выбирают из интервала 0, 60, 9� для талых
грунтов и 0, 91, 2� для мерзлых. Для нижней части забоя принимаются меньшие значения, а для верхней части — большие. Силы � P01 и P02
90
4.5. Тяговый расчет
приложены к режущим кромкам на расстоянии Rср от оси вращения
ротора. По табл. 3.1 принимаем k1 = 450 кПа.
� P011 B k1c0 sin A1 1, 2 450 0, 036 sin 7631 3,5 23,1 кН;
P021 P01 0,8 23,1 18, 48 кН.
� P01 2 B k1c0 sin A1 1, 2 450 0, 036 sin 7631 2543 3,5 19, 26 кН;
P02 2 P01 0,8 19, 26 15, 41 кН.
� P013 B k1c0 sin A1 1, 2 450 0, 036 sin 7631 2 2543 3,5 12, 64 кН;
P023 P01 0,8 12, 64 10,11 кН.
� P01 4 B k1c0 sin A1 1, 2 450 0, 036 sin 0 3,5 4, 2 кН;
P02 4 P01 0,8 4, 2 3,36 кН.
2. Сопротивление резанию грунта ножевыми откосниками раскладывают на горизонтальную X 0, H, и вертикальную Y0, H, составляющие и определяют их по эмпирическим зависимостям:
X 0 33,8F20,79 33,8 0, 480,79 18, 93 Н;
Y0 X 0 ctg 1 18, 93 ctg 35 25 107,36 Н.
3. Силу тяжести грунта Gi , Н, определяют для каждого ковша
по формуле
Gi gBhi ,
где hi — высота положения режущих кромок зубьев i‑го ковша. h1 ≈ 1,3 м,�
h2 ≈ 0, 6 м, h3 ≈ 0,16 м, h4 ≈ 0.
Силы Gi от дна траншеи можно считать приложенными в центре
масс каждого ковша:
G1 1700 9,8 1, 2 0, 036 1,3 935, 6 Н;
G2 1700 9,8 1, 2 0, 036 0, 6 431,8 Н;
G3 1700 9,8 1, 2 0, 036 0,16 115, 2 Н;
G4 = 0.
91
4. Пример расчета роторного траншейного экскаватора
4. Силу тяжести грунта, находящегося на конвейере, определяем
с учетом грунта, размещаемого вне активной зоны. Площадь поперечного сечения заполненного конвейерного желоба при угле наклона боковых щитков к ленте, равном 60°, определяется как
Fтр bл hг 0,58hг 0,120,15 ba 1 0, 093 0,58 0, 092 0,12 0, 77 0, 097 м2.
Площадь же активной зоны грунтового потока будет
Fa ba hг 0, 77 0, 092 0, 07� м2.
После совместного решения этих уравнений, путем исключения
высоты грунтового слоя, получим
Fтр bл
1
Fa 0,58Fa 0,120,15 0, 07 0, 058 0, 07 0,12 0, 091 м2 � .
ba
0, 77
Суммируя левую и правую части этой зависимости по длине конвейера и умножая результат на объемную массу грунта в разрыхленном состоянии ψ р и на ускорение свободного падения g, приходим
к зависимости
Gк bл
Ga 0,58Ga 0,120,15 ba
1
10 879,37 0,58 10 879,37 0,12 14 486,3 Н,
0, 77
где Ga — силы тяжести грунта, находящегося в активной зоне,
Ga р g Fa dLк Lк
Пmax р gLк
1800Vг
1, 2 gПmax Lк
1800 Vг
1700 1, 2 9,8 864 3, 9
10 879,37 Н.
1800 3, 44
Здесь Lк — длина конвейера.
5. После нанесения всех сил на расчетную схему, из условия равенства нулю суммы моментов относительно точки подвеса ротора к тягачу находим реакцию задней опоры
M
92
Т
0,
4.5. Тяговый расчет
–P01(1) · lP01(1) + P02(1) · lP02(1) – G1 · l1 + P01(2) · lP01(2) + P02(2) · lP02(2) –
– G2 · l2 + P01(3) · lP01(3) + P02(3) · lP02(3) – G3 · l3 + –P01(4) · lP01(4) +
+ P02(4) · lP02(4) – G4 · l4 + X0 · lX0 + Y0 · lY0 – GP0 · lP0 – Gк · lк + Y30 · lY30 +
+ X30 · lX30 = 0,
–23,1 · 103 · 0,51 + 18,48 · 103 · 1,14 – 935,6 · 1,2 +
+ 19,26 · 103 · 0,270 + 15,41 · 2,13 · 103 – 431,8 · 1,71 +
+ 12,64 · 103 · 1,35 + 10,11 · 103 · 2,7–115,2 · 2,04 + 4,2 · 103 · 2,55 +
+ 3,36 · 103 · 2,760 + 18,93 · 1,08 + 1772,89 · 2,28 –
– 8470 · 9,8 · 2,7–14 886,3 · 2,7 + Y30 · 5,58 + 0,1 · Y30 · 2,55 = 0.
Отношение ее составляющей X 30 / Y30 принимаем равным 0,1 для
каждой колесной опоры. В результате построения силового много­
угольника находят реакции тягача X т и Yт . Для роторных траншеекопателей вес установки ротора с приводом
g т.р 0, 220,37 Gт.р;
Gт.р 0, 0090, 011 Пmax R1,
где R1 — удельное сопротивление копанию.
Gт.р 0, 010 864 3,5 30, 24 т.
g т.р 0, 28 30, 24 8, 47 т.
Y30 (5,58 0,1 2,55) 134 021, 28 Н, откуда Y30 = 22 968,5 Н,
следовательно, X 30 = 2296,8 Н.
По методу многоугольника сил получим: X т = 61500 Н, Yт = 92 500 Н.
6. Необходимое тяговое усилие тягача равно сумме проекций всех
действующих сопротивлений на направление движения. К ним относятся:
1) сопротивление рабочего органа (X т′ и Yт′);
2) сопротивление тягача самопередвижению (Wт );
3) сопротивление подъему (Wп).
93
4. Пример расчета роторного траншейного экскаватора
7. Вторая составляющая сопротивлений Wт определяется по формуле (15)
Wт f Gт Yт cos 0,14 30, 24 103 9,8 92 500 cos 0 54 439,3 Н,
где f — коэффициент сопротивления самопередвижению, f = 0,14 ; Gт —
сила тяжести тягача, Н; β — угол продольного подъема (для горизонтального участка β = 0).
Значения коэффициента f принимают в пределах 0,13–0,15 для супесей; 0,14–0,18 для тяжелых супесей и мягких суглинков и 0,20–0,25
для жирных глин.
8. Сопротивление подъему равно горизонтальной составляющей
силы Gт
Wп Gт sin 0.
9. Общее сопротивление W, равное тяговому усилию T, определяется по формуле
W T X т Wт Wп 61500 54 439,3 115 939,3 Н.
10. Тяговое усилие и нормальная реакция почвы должны находиться между собой в таких соотношениях, при которых обеспечено надежное сцепление опорной поверхности движителя с почвой. Это условие записывается в виде
w
115 939,3
T
0,39.
3
Gт Yт cos 30, 24 10 9,8 92 500 cos 0
Величина w — коэффициент сцепления. Его допустимые значения
[w] для различных грунтов приведены в подгл. 3.3.
11. Мощность привода ходового механизма N хр в случае применения одномоторного привода составит
N хр T0Vп
115 939,3 300 �
10, 74 кВт �,
3600 1000х 3600 1000 0, 9
где T0 — значение T при 0; ηх — коэффициент полезного действия
трансмиссии ходового механизма.
12. Рассчитывают реакции тягача при работе на косогоре с предельным углом наклона 7 о (рис. 4.4).
94
4.5. Тяговый расчет
Xт
Yт
Xт
Gk
Yт
P01(1)
P02(1)
P01(2)
P02(2)
G ро
G1
X0
G2
P01(3)
Y0
G3
P02(3) P01(4)
P02(4)
G4
Y30
X30
Рис. 4.4. Схема сил, действующих на ротор при работе на уклонах в 7°
M
Т
0,
–P01 (1) · lP01 (1) + P02 (1) · lP02 (1) – G1 · l1 + P01 (2) · lP01 (2) +
+ P02 (2) · lP02 (2) – G2 · l2 + P01 (3) · lP01 (3) + P02 (3) · lP02 (3) – G3 · l3 +
+ P01 (4) · lP01 (4) + P02 (4) · lP02 (4) — G4 · l4 + X0 · lX0 + Y0 · lY0 –
– GP0 · lP0 – Gк · lк + Y30 · lY30 + X30 · lX30 = 0,
22,33 103 0, 450 17,86 103 1, 20 935, 6 0, 912 18,11 103
3 0,180 14, 49 2,10 103431,8 1, 41 11, 66 103 1, 41 9,33 103 2, 7 115, 2 2, 01 4, 2 103 2,58 3,36 103 2, 70 0 18, 93 1,11 1772,89 2,31 – 83 006 2, 64 14 886, 2 2, 76 Y30 5,58 0,1 Y30 2, 61 0,
151 232, 44
=
Y30 = 25 891,5 Н;� � X 30 = 2589, 2 Н.
откуда
5,841
По методу многоугольника сил находим X т = 76 500 Н, Yт = 85 500 Н.
13. Необходимое тяговое усилие тягача составит
95
4. Пример расчета роторного траншейного экскаватора
Wт f Gт Yт cos 0,14 30, 24 103 9,8 85 500 cos 7 � 76 500 sin 7 cos 7 54 267, 74 � Н.
14. Сопротивление подъему будет
Wп Gт sin 30, 24 103 9,8 sin 7 36116, 22 Н.
15. Общее сопротивление W, равное тяговому усилию, определяется по формуле
W T X т Wт Wп 76 500 � 54 267, 74� 36112, 22 166 879, 96 Н.
16. Коэффициент сцепления
w
T
(Gт Yт)cos 166 879, 96
0,43 [w].
(30, 24 10 9,8 85 500 cos 7 76 500 sin 7) сos7
3
17. Мощность привода ходового механизма N хр для одномоторного привода
N хр T0Vп
166 879, 96 300 �
15, 45 кВт.
3600 1000х 3600 1000 0, 9
Контрольные вопросы и задания
1. Назовите исходные данные для расчета роторного траншейного экскаватора.
2. Назовите порядок расчета основных параметров экскаватора.
3. Перечислите основные этапы выбора основных параметров отвального конвейера.
4. Каким соотношением связаны между собой размеры поперечных сечений отвала и траншеи?
5. Как определяется суммарная мощность отвального конвейера?
6. Укажите основные особенности работы экскаватора на косогоре.
7. Дайте пояснения по схеме сил, действующих на ротор.
96
5. Новые направления
в проектировании и эксплуатации
траншейных роторных экскаваторов
Т
раншейные роторные экскаваторы применяются всё более
и более широко. Причин этого несколько: увеличение объемов жилищного строительства, развитие кабельных сетей
связи, подземных систем водоснабжения и газоснабжения, систем
мелиорации и др. Только за 2019 г. в Российской Федерации введено в строй 79,4 млн м 2 жилья, созданы и функционируют газопроводы, способные ежегодно перекачивать 10–50 млрд м3 газа, протяженность газораспределительных сетей достигла 976,9 тыс. км, а стратегия
мелиорации предполагает рост объема мелиорируемых сельхозугодий
до 10,1 млн га. В таких условиях конструкции роторных экскаваторов
и принципы их эксплуатации непрерывно совершенствуются. Модернизируются роторы, ковши, отвальные конвейеры и тягачи и пр., ведутся работы по снижению их металлоемкости и энергопотребления,
оптимизируются режимы работы экскаваторов. Рассмотрим в связи
с этим некоторые новые решения в проектировании и эксплуатации
траншейных роторных экскаваторов, разработанные преимущественно на кафедре «Подъемно-транспортные машины и роботы» УрФУ.
97
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
5.1. Выбор режимов работы экскаватора
из условия недопустимости резонансных явлений
Для сокращения сроков строительства, режимы работ траншейных
роторных экскаваторов (скорость вращения ротора n, мин–1, и скорость линейного перемещения всей машины S, м/мин) обычно выбирают так, чтобы обеспечить максимально возможную выемку грунта
в единицу времени. Однако при этом, особенно при пониженной металлоемкости элементов экскаватора, не исключается возможность
возникновения резонансных явлений из-за сближения частоты вынужденных колебаний ротора в процессе копания грунта с частотой
собственных колебаний системы «ротор — стрела».
Рассмотрим причины вынужденных колебаний ротора. Основные
из них две: периодические изменения силы копания при работе ковшей ротора на пути от их входа в зону копания до выхода из нее и изменение среднего значения этой силы при вращении ротора из-за его
дисбаланса [16–18]. Вторая причина создает колебания с частотой вращения ротора, равной n, а первая — с частотой, равной числу zp его одновременно работающих ковшей.
На рис. 5.1 показано изменение силы копания при работе ротора
одним ковшом, копании одновременно двумя и тремя ковшами, откуда видно, что амплитуда колебаний силы с ростом zp уменьшается,
а количество ее пиковых значений при прохождении ковшами зоны
копания увеличивается. При этом указанное количество одновременно работающих ковшей действительно равно zp.
Найдем примерную частоту вынужденных колебаний fв ротора,
принимая отмеченное во внимание и учитывая, что она, как правило, растет с ростом жесткости грунта [14, 19–21].
Воспользуемся теорией информации Р. Хартли. Согласно его теории, количество информации Н в некотором несущем ее объекте,
имеющем А состояний, равно логарифму А. Если объекты независимы, то количество информации в совокупности их состояний есть
сумма количества информации, соответствующей всем этим объектам. Отсюда следует
log fв log K log n log zр,
(18)
где К — некоторый показатель, характеризующий жесткость грунта.
98
5.1. Выбор режимов работы экскаватора из условия недопустимости резонансных явлений
а
р
Путь зуба ковша в грунте
б р
Путь ковша
в грунте
в р
Путь первого ковша
в грунте
Путь второго ковша
в грунте
Путь третьего ковша
в грунте
Рис. 5.1. Влияние числа zp одновременно работающих ковшей на силу копания P:
а — одним ковшом; б — двумя; в — тремя
Пропотенцируем уравнение (18) и получим fв, Гц,
1
Knz р.
(19)
60
Определить К можно разными способами, но, по-видимому, проще всего исходя из представлений об аналогии жесткости грунта его
сопротивлению сдвигу. Последнее, согласно классической формуле
Кулона, есть
fв =
99
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
tg c0 ,
где σ — напряжение в грунте под действием внешней силы, градус;
φ — угол внутреннего трения грунта; с0 — сцепление грунта, кгс/см 2.
Значения угла внутреннего трения φ и сцепления с0 для глинистых
грунтов различной консистенции приведены в табл. 5.1 [14].
Таблица 5.1
Углы внутреннего трения φ и сцепление с0 для глинистых грунтов
различной консистенции
Глина
Суглинок
Консистенция
с0,
(состояние грунта) φ, град с0, кгс/см 2 φ, град
кгс/см 2
Твердая
22
1,0
25
0,6
Полутвердая
20
0,6
23
0,4
Тугопластичная
18
0,4
21
0,25
Мягкопластичная
14
0,2
17
0,15
Тягучепластичная
8
0,1
13
0,10
Текучая
6
0,05
10
0,05
Супесь
φ, град
28
26
24
20
18
14
с0,
кгс/см 2
0,20
0,15
0,10
0,05
0,02
0,0
С точностью, достаточной для инженерных расчетов, правомерно
считать, что разрушение грунта при копании начинается тогда, когда
уп Т Р ,
(20)
где σуп — предел упругости грунта; σТ — предел текучести; σр — предел
прочности на растяжение, т. е. тогда, когда
К Т tg c0.
Чем больше τК, тем жестче грунт, а значит показатель К, характеризующий жесткость грунта, правомерно считать функцией τК.
Основываясь на выражении (20), величину σТ в данном случае можно считать равной пределу прочности на растяжение σр. Это позволяет
в качестве значений σТ использовать значения σр для разных грунтов,
приведенные в табл. 5.2, по данным ВНИИстройдормаша.
Очевидно, что грунт текучей консистенции с весьма малыми σТ, φ
и с0 жесткостью практически не обладает, и К для него можно принять
равным 1. Положив для него К min , получим 1 min , а для грунтов
min
100
5.1. Выбор режимов работы экскаватора из условия недопустимости резонансных явлений
более твердой консистенции — K K
. Воспользовавшись данными
min
[14], найдем min 0, 03 МПа.
Таблица 5.2
Предел прочности на растяжение
Влажность, %
5
10
15
18–20
5
10
17
20
30
41
70
20
30
48
70
Предел прочности (условно-мгновенные сопротивления)
σр, МПа, при растяжении при различной температуре
–1 °С
–5 °С
–10 °С
Песок
0,12
0,4
0,59
0,32
0,66
0,93
0,44
1,01
1,34
0,62
1,34
1,66
Супесь
0,2
0,31
0,49
0,62
0,92
1,06
0,77
1,52
2,23
Суглинок
0,87
1,92
2,09
1,23
2,16
2,23
1,15
2,26
2,4
0,94
1,6
2,06
Глина
1,14
2,01
0,55
0,84
1,55
2,11
2,5
1,4
2,16
2,05
1,17
1,4
В результате проведенных расчетов будем иметь формулу, с помощью которой можно для любых грунтов находить К,
K 33,3 Т tg c0 .
(21)
Подставляя выражение (21) в уравнение (19), можно вычислять fв
для экскаваторов, копающих траншеи в любых грунтах, но для этого
необходимо определять входящее в выражение (19) zp.
Обратимся к рис. 5.2. Из него видно, что
R t
cos ,
R
(22)
101
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
или
R t
,
R
где R — радиус ротора, м; t — глубина копаемой траншеи, м.
При числе ковшей ротора z это влечет за собой
arccos
zр и
(23)
z z
R t
arccos
2 2
R
fв 0,55n Т tg c0 z
R t
arccos
.
R
2
(24)
Рис. 5.2. Схема к расчету числа zp с учетом глубины копания t
Формула (24) позволяет вычислять частоту вынужденных колебаний ротора при чрезвычайно малых склоростях S движения экскаватора. Она дает возможность управлять величиной fв, изменяя скорость
вращения ротора n и глубину копания t. Однако из практики хорошо
известно, что при достаточно больших скоростях S управлять частотой вынужденных колебаний ротора можно и путем изменения скорости линейного перемещения экскаватора [22–24].
Линейное перемещение экскаватора (рис. 5.3) как бы растягивает зону взаимодействия ротора с грунтом, увеличивая ее на некоторую величину y. Угол взаимодействия γ ковшей ротора с грунтом при
такой трактовке рассматриваемого процесса можно считать содержащим некоторое условное число одновременно работающих ковшей,
зависящее как от глубины копаемой траншеи t, так и от скорости движения экскаватора S.
102
5.1. Выбор режимов работы экскаватора из условия недопустимости резонансных явлений
Рис. 5.3. Схема к расчету числа zp с учетом глубины копания t и подачи Sz
По аналогии с формулами (22) и (23) имеем
x
cos,
R
или
R t
arccos
.
2
R
Из формул (25) и (26) следует
R t x R cos arccos
,
R 2
(25)
(26)
(27)
а поскольку
xy
tg ,
R t
то из выражений (27) и (28) вытекает
(28)
R t y
R cos arccos
R 2
arctg
.
R t
Положим y равным величине линейного перемещения экскаватоS
ра за один оборот ротора . В таком случае некоторое условно-расчетn
ное zp может быть определено как
103
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
R t S
R cos arccos
z
z
R n
2
zр arctg
.
2 2
R t
Подставляя уравнение (29) в формулу (19), получим
(29)
R t S
R cos arccos
nz
R n
2
fв 0,55 Т tg c0 arctg
.
(30)
2
R t
Формула (30) может быть использована для приближенного расчета частоты вынужденных колебаний и управления ею путем изменения t, n и S при копании разных грунтов. Однако для целенаправленного, а не хаотичного изменения этих параметров нужно знать частоту
собственных колебаний fc системы «ротор — стрела». В отличие от частоты fв, ее определить можно достаточно просто.
Известно, что частота собственных колебаний всякой механической системы может быть выражена в герцах как
1 g
,
2 m
где g — жесткость системы; m — масса.
Масса системы «ротор — стрела» будет
fc m mр mс ,
где mp и mc — масса элементов этой системы.
Жесткость g системы связана c жесткостями gp ротора и gc стрелы как
g g
1 1 1
, откуда g р с .
g g р gс
g р gс
Таким образом, в рассматриваемом случае
fc g р gс
1
.
2 ( g р gс )(mр mс )
Расчеты частоты fв и fc позволяют проверить, не возникнут ли при
эксплуатации траншейного роторного экскаватора резонансные явления, и выбрать режимы копания n и s, предотвращающие эти явления.
104
5.2. Снижение вероятности резонанса при работе экскаватора.
5.2. Снижение вероятности резонанса
при работе экскаватора за счет рационального выбора
конструктивных параметров ковшей и ротора
Описанный выше способ выбора режимов работы роторного экскаватора во многих случаях довольно эффективно предотвращает резонанс
при эксплуатации этой машины. Его обычно применяют, стараясь «отстроить» частоту вынужденных колебаний fв, возникающих при работе ротора, от частоты собственных колебаний fc системы «ротор — стрела» примерно на 20–25 %. Однако полностью исключить резонанс он
позволяет не всегда. Причина состоит в том, что резонанс бывает полный и неполный. Если каждый импульс (наибольшая высота волны)
вынужденных колебаний совпадает с каждым импульсом частоты собственных колебаний, то возникает полный резонанс; если же последние совпадают, например, с каждым вторым, или третьим, или i‑м импульсом вынужденных колебаний, то возникает неполный резонанс.
Предотвращая полный резонанс, способ, описанный в предыдущем
параграфе, далеко не всегда предотвращает неполный. На рис. 5.4 показаны примеры временных диаграмм, иллюстрирующих это: а — диаграмма расположения в диапазоне 1 с вынужденных колебаний ротора
с частотой fв = 21 Гц; б — диаграмма расположения во временном диапазоне 1 с импульсов собственных колебаний (системы «ротор — стрела» с частотой fc = 28 Гц); в — диаграмма расположения во временном
диапазоне 1 с импульсов вынужденных колебаний ротора с частотой
fв =14 Гц; г — диаграмма расположения в этом же временном диапазоне
импульсов вынужденных колебаний с частотой fв = 19 Гц.
Как видно из рис. 5.4, если fc ≠ fв, то полного резонанса нет, но если
fв = 21 Гц (рис. 5.4, а), то остается возможность совпадения импульсов
вынужденных колебаний с импульсами, идущими через три интервала между импульсами с частотой fc . Имеет место неполный резонанс,
которому соответствует 3 = fв / 7, где 7 — наибольший общий делитель
числа fc = 28 и fв = 21. Если, например, fв = 14 Гц (рис. 5.4, в), то останется возможность совпадения импульсов последовательности импульсов
вынужденных колебаний с импульсами последовательности собственных колебаний, идущими через два интервала между импульсами с частотой fc . Опять имеет место неполный резонанс, которому соответ105
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
ствует 2 = fв / 14, где 14 — наибольший общий делитель чисел fc = 28 и
fв =14. Если же fв = 19 (рис. 5.4, г), то совпадения импульсов последовательностей собственных и вынужденных колебаний не будет. Числа fв и fc не имеют общих делителей и являются взаимно простыми,
поэтому и нет совпадений. Таким образом, для предотвращения как
полного, так и неполного резонансов при работе роторного экскаватора, режимы его работы должны быть выбраны так, чтобы числа fв
и fc были взаимно простыми. При этом копание будет происходить без
резких всплесков динамических нагрузок и достаточно равномерно.
а
б
в
г
Рис. 5.4. Примеры временных диаграмм,
иллюстрирующих возникновение резонанса
Сформированные условия, на первый взгляд, осуществить нетрудно. Вместе с тем они накладывают на выбор n и S жесткие ограничения,
которые реализовать на практике нелегко. В связи с этим разрабатываются и другие способы обеспечить равномерность копания. К ним,
в частности, относится выбор конструктивных параметров ковшей,
рассматриваемых ниже.
Проанализируем причины возникновения неравномерности копания применительно к роторному экскаватору с фронтальными ковшами с прямолинейной режущей кромкой (такие ковши общеземельного
назначения типа Tarsus, Doosan Solar, Akerman и др. распространены
довольно широко [14]). Воспользуемся для этого подходом [25].
Для облегчения копания режущую кромку упомянутых ковшей
выполняют с наклоном под углом ω по отношению к оси ротора. В таком случае они врезаются в грунт постепенно, а если в разработке траншеи одновременно участвует несколько ковшей, то все они работают
в этом смысле одинаково. Разница только в том, что, когда один ковш
106
5.2. Снижение вероятности резонанса при работе экскаватора
еще только начинает взаимодействие с грунтом, другой его уже заканчивает, а третьи, находящиеся между ними, работают всей длиной
кромки. На рис. 5.5 это проиллюстрировано с помощью развертки поверхности копания некоторой длины Т на плоскость, где показан процесс врезания в грунт одновременно трех ковшей: А — эпюра толщины срезаемого слоя грунта первым ковшом; В — вторым ковшом;
С — третьим ковшом. Рабочий угол каждого ковша начинается в точке 1, а заканчивается в точке 2. Расстояние между соседними ковшаD
ми, измеренное в плоскости ротора, l1 , где D — диаметр ротора
z
по кромкам ковшей; z — число ковшей в роторе. Расстояние между
L
соседними ковшами, измеренное параллельно оси ротора, l2 = , где
k
L — ширина ковша; k — коэффициент кратности, показывающий, какая часть l2 укладывается в L.
1
В
l1
С
l2 L
А
Т
2
Рис. 5.5. Развертка поверхности копания длины Т
Величины l1 и l2 связаны между собой соотношением
tg l1 / l2 откуда
k
kD
,
zL
zL tg .
D
(31)
(32)
107
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
От числа k зависит неравномерность копания. Если k — число
дробное или смешанное, то копание будет происходить неравномерно; если целое — то равномерно. Действительно, равномерное копание — это такое, при котором сила сопротивления грунта работе ковшей не меняется. Для этого требуется, чтобы площадь сечения s слоя
грунта, срезаемого ковшами, оставалась постоянной в любой момент
времени. В случае, когда k — дробь или смешанное число, указанная
площадь переменна: когда один ковш уже начинает выходить из взаимодействия с грунтом и площадь срезаемого им слоя s1 уменьшается, тогда площади слоев, срезаемых другими ковшами, это уменьшение не компенсируют. Для того чтобы имело место
s si s1 s2 s3 const,
i
необходимо, чтобы k было целым [26].
Чтобы k было целым числом, теоретически нужно, чтобы L было
равно l2 или кратно ему. На практике же, во избежание неоправданного увеличения ширины ковшей рассматриваемых экскаваторов, k
целесообразно принимать равным 1. При таком условии выражения
D
ctg , легко применимый для определе(31) и (32) примут вид L z
ния L в процессе проектирования экскаваторов.
Пусть, например, диаметр ротора экскаватора D задан равным 2 м.
Число ковшей ротора принято z = 12, тогда, приняв ω = 30°, получим
2000
1, 73 900 мм .
12
Если ω = 40°, то при том же диаметре ротора и том же количестве
ковшей
2000
L
1,54 800 мм.
12
Реализуя конструктивно заданные и полученные данные, или,
по крайней мере, близкие к ним, можно обеспечить вполне удовлетворительную равномерность копания грунтов проектируемого экскаватора.
Описанный способ успешно может быть использован при создании экскаваторов для разработки траншей разной ширины и глубины двумя и более одновременно работающими ковшами. Угол ω для
ковшей может быть выбран тоже разный, хотя его наиболее приемлемые значения лежат в пределах 30–40°.
L
108
5.2. Снижение вероятности резонанса при работе экскаватора
Обеспечивая равномерность копания за счет рационального выбора параметров конструкции ковшей, можно так же, как и за счет
рационального выбора режимов копания, значительно снизить вероятность резонанса при работе траншейного экскаватора. Однако последнего можно достичь и иными путями.
Взаимодействуя с грунтом последовательно, один за другим, ковши роторного экскаватора создают ритмические изменения силы, действующей на систему «ротор — стрела». Если изменения этой силы
сделать аритмичными, то резонанса можно будет избежать.
Совершенно ясно, что при достаточно равномерной структуре
грунта частота колебаний нагрузок, действующих на ротор, зависит
от интервалов между ковшами ротора. С ростом интервалов частота
снижается, с уменьшением — возрастает. Равенство интервалов ведет
к постоянству вынужденных колебаний, а оно-то и может вызвать резонанс. Отсюда следует, что для снижения вероятности резонанса при
конструировании ротора экскаватора, интервал между его ковшами
целесообразно сделать неравномерным.
Максимальное снижение вероятности резонанса будет тогда, когда все интервалы между ковшами отличаются друг от друга (не повторяются). Однако конструируя ротор, такие интервалы нужно вычислять. Методика вычислений должна быть достаточно конкретна
и вместе с тем проста, что необходимо для облегчения ее применения
в инженерной практике.
В связи с изложенным была разработана описываемая ниже методика расчета неповторяющихся интервалов между ковшами ротора
траншейного экскаватора, базирующаяся на теории рядов.
Методика выполнена в двух вариантах: для роторов с нечетным
и четным количеством ковшей. При нечетном числе ковшей п интервал
между ковшами рекомендуется определять из следующих соотношений:
i i 1 2 720
21 ;
n 1 n
n n 2 1
2
j j 1 1 720
21 ;
n 1 n
2 720
21 ,
n 1 n
109
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
где φ1 — интервал между первым и вторым ковшами; i — порядковый
n
номер интервала, равный 2, 3, …, ; j — порядковый номер интер2
n
n
n
вала, равный 2, 2, …, n, а — минимальное целое число,
2
2
2
большее n/2.
При четном числе ковшей n интервал может быть определен по соотношениям:
2 720
i i 1 21 ;
n 1 n
1 720
n n 21 ;
1
n 1 n
2
2
2 720
21 ,
j j 1 n 1 n
где φ1 — интервал между первым и вторым ковшами; i — порядковый
n
номер интервала, равный 2, 3,.., ; j — порядковый номер интервала,
2
n
n
равный + 2, + 3, …, n.
2
2
На рис. 5.6, а, как иллюстрация методики показана схема расположения ковшей при нечетном числе n (n = 9), на рис. 5.6, б — схема
расположения ковшей при четном n (n = 8).
а
б
9
8
17
1
10
11
16
2
7
3
12
15
6
4
5
14
Рис. 5.6. Схема расположения ковшей:
а — при нечетном числе n; б — при четном числе n
110
13
5.3. Устранение вибраций механизмов экскаватора путем применения адаптивных виброгасителей
На рис. 5.6, а интервал 1 между первым и вторым ковшами принят
φ1 = 32,4°. В таком случае интервал 2, равный φ2, составляет 36,2°; интервал 3 — φ3 = 40°; интервал 4 — φ4 = 43,8°; интервал 5 — φ5 = 47,6°;
интервал 6 — φ6 = 45,7°; интервал 7 — φ7 = 41,9°; интервал 8 — φ8 =
= 38,1°; интервал 9 — φ9 = 34,3°.
На рис. 5.6, б интервал 10 между первым и вторым ковшами принят φ1 = 33°. В таком случае интервал 11, равный φ2, составляет 39,857°;
интервал 12 — φ3 = 46,714°; интервал 13 — φ4 = 53,571°; интервал 14 —
φ5 = 56,999°; интервал 15 — φ6 = 50,142°; интервал 16 — φ7 = 43,286°;
интервал 17 — φ8 = 36,428°.
Как видно, при размещении ковшей ротора с неравномерным интервалом ни в том, ни в другом случае среди интервалов нет повторяющихся.
При конструировании ротора траншейного экскаватора указанное
его исполнение приводит к минимизации вероятности резонанса. Он
остается возможным лишь тогда, когда частота собственных колебаний системы «ротор — стрела» будет кратной частоте вращения ротора.
5.3. Устранение вибраций механизмов экскаватора
путем применения адаптивных виброгасителей
В случаях, когда с помощью перечисленных выше мер конструкторского характера, а также в случаях возникновения режимов работы
экскаватора, явления резонанса или нерезонансные явления, но все же
со значительными вибрациями устранить не удастся, агрегаты экскаватора, например металлоконструкции его стрелы, оказывается целесообразно снабжать специальными виброгасящими устройствами.
Особенно это имеет смысл при нерезонансных вибрациях.
При изменении режимов эксплуатации изменяются и частоты вибраций, а потому эффективным средством их ликвидации является адаптивное виброгашение [27]. Суть его состоит в том, что частота
собственных колебаний виброгасителя автоматически подстраивается под частоту вибрации (вынужденных колебаний) системы, причем
так, чтобы обеспечить их равенство и резонанс. Энергия вынужденных колебаний в таком случае наиболее полно поглощается виброгасителем при разных частотах, и колебания системы устраняются практически полностью при любых режимах ее работы.
111
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Способов адаптивного виброгашения существует несколько, что
обусловлено зависимостью [28]
1
4 mc k 2 ,
(33)
4 m
где f — частота собственных колебаний виброгасителя, Гц; m — его
масса, кг; c — жесткость, Н/м; k — коэффициент вязкого трения, кг/с,
в гидравлических виброгасителях с регулируемыми дросселями, равный, в частности,
F
k 3 .
(34)
10 h
Здесь μ — вязкость масла, используемого в виброгасителе, Па·с; F —
площадь поверхности щели его дросселя, мм 2; h — ширина щели, мм.
Регулировать f, подстраивая ее под частоту вынужденных колебаний, в соответствии с выражениями (33) и (34), можно путем изменения всех входящих в них величин. Это порождает различные конструктивные схемы адаптивных виброгасителей, наиболее характерные
из которых приведены на рис. 5.7.
На рис. 5.7, а показан виброгаситель, в котором на штоке 2 с помощью мембраны 4 закреплен груз 5, подтягиваемый вверх жестко закрепленным на штоке электромагнитом 3. Вместе с электромагнитом
на штоке установлен датчик частоты 1, соединенный с электромагнитом через усилитель 8 и аналоговый сумматор. Виброгаситель ввинчивается в вибрирующий объект 6 так, чтобы его ось совпадала с направлением вибрации, а затем путем подачи некоторого напряжения
смещения на клемму 7 настраивается. Сила притяжения электромагнита частично компенсирует силу тяжести груза, что эквивалентно
уменьшению его массы. При изменении частоты вынужденных колебаний, датчик частоты изменяет величину компенсации, и частота собственных колебаний виброгасителя подстраивается в резонанс.
На рис. 5.7, г показан виброгаситель, который также работает с изменением массы, но иным способом. В его корпусе 2 на упругой мембране 3 закреплен груз 4, выполненный в виде пружинного гидроаккумулятора. Датчик частоты 1, установленный на корпусе 2, через
усилитель 10 подключен к электроуправляемому дросселю 6. Через
постоянный (настроечный) дроссель 7 в полость гидроаккумулятора
и на дроссель 9 под давлением P подается жидкость. Она приподнимает поршень 7, сжимая пружину 8 гидроаккумулятора, и заполняет
f 112
5.3. Устранение вибраций механизмов экскаватора путем применения адаптивных виброгасителей
определенный объем последнего, создавая его определенную массу.
По сигналу от датчика 1 дроссель 10 регулирует слив жидкости в емкость 7, тем самым изменяя массу жидкости в гидроаккумуляторе 4.
Получается, что это изменение задается частотой вынужденных колебаний объекта 5, вибрации которого требуется погасить. Таким образом, частота собственных колебаний виброгасителя всё время согласуется с частотой вынужденных колебаний объекта.
а
б
в
г
д
е
Рис. 5.7. Конструктивные схемы адаптивных виброгасителей
Конструктивные схемы виброгасителей, работающих с изменением жесткости, приведены на рис. 5.7, б и в. Первая из них содержит
корпус 7, мембрану 8 с грузом 9 аналогично предыдущему варианту.
Однако в ней используют пневмоцилиндры 10. Датчик частоты 3, установленный на корпусе 7, через усилитель 2 в этом виброгасителе соединен с регулятором давления воздуха 1, питающим пневмоцилиндры. Воздух подается в бесштоковые полости цилиндров и изменяет
фактическое положение точек защемления мембраны относительно
кронштейнов 4, на которых мембрана крепится в корпусе 7. Это происходит в результате перемещения губок 13 штоков поршней 12, от113
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
носительного движения кронштейнов 4 в окнах 5 штоков и смещения
штоков в отверстиях 6. Обратное перемещение поршней осуществляется под действием пружин 11 при стравливании воздуха из цилиндров.
Вторая схема управления частотой собственных колебаний виброгасителя путем изменения жесткости, иллюстрируемая рис. 5.7, в,
основывается на изменении упругости жидкости при переменном
давлении. Как известно [29], во всякой жидкости содержатся растворенные газы. Их количество определяет ее модуль упругости. В связи с этим жидкость в некоторой емкости может рассматриваться как
особого рода пружина. Корпус 2 виброгасителя, построенного на таких пружинах, так же как и в ранее рассмотренных случаях, ввинчивается в вибрирующий объект 5. Внутри корпуса размещаются датчик
частоты 1 и груз 3. Датчик через усилитель 7 соединяется с регулятором давления жидкости 6. Груз прикрепляется к корпусу с помощью
сильфонов 4. Полости сильфонов заполнены жидкостью, поступающей извне через регулятор 6. Меняется частота вынужденных колебаний — соответственно меняется давление в сильфонах, их жесткость
и частота собственных колебаний.
Описанный виброгаситель близок по конструкции показанному
на рис. 5.7, д. Однако принцип действия последнего другой. В его корпусе 2 по скользящей посадке размещен груз 3, поджатый с двух сторон
пружинами 4. Груз делит полость корпуса на 2 части, которые заполняются вязкой жидкостью, например машинным маслом. На корпусе 2 закреплен датчик частоты 1, соединенный с управляемым дросселем 6 через усилитель 7. Обе части полости корпуса связаны между
собой через этот же дроссель, и от ширины его щели зависит, как будет перетекать масло из одной части полости в другую при колебаниях груза 3. Однако ширина щели регулируется частотой вынужденных
колебаний, поэтому, установив виброгаситель на колеблющемся объекте 5, можно обеспечить управление частотой собственных колебаний груза в согласии с частотой колебаний вынужденных.
Управление шириной дросселирующей щели, по сути, — управление коэффициентом вязкого трения в формуле (33). Однако, как видно
из формулы (34), этот коэффициент можно изменять и за счет вязкости масла. Вязкость же масла существенно зависит от его температуры [29], поэтому, окружив масляный виброгаситель водяной рубашкой и меняя температуру в ней, можно регулировать и коэффициент
вязкого трения, и частоту собственных колебаний виброгасителя. По114
5.3. Устранение вибраций механизмов экскаватора путем применения адаптивных виброгасителей
добное решение предложено на рис. 5.7, е. Здесь 10 — корпус виброгасителя так же, как и всегда, ввинчиваемый в вибрирующий объект 6;
2 — датчик частоты. Помимо этого, виброгаситель снабжен терморегулятором жидкости 9 и прокачивающим через него воду насосом 7.
В корпусе 10 с зазором размещен груз 4, поджатый с двух сторон пружинами 3. В грузе выполнены дросселирующие отверстия, корпус заполнен маслом и окружен водяной рубашкой 5, соединенной кольцевой
гидролинией с терморегулятором 9 и насосом 7. Датчик 2 через усилитель 1 и сумматор напряжений 8 подключен к управляющему входу
терморегулятора, поэтому при изменении частоты вынужденных колебаний ранее настроенная сигналом А температура воды в рубашке
будет меняться, а значит, изменится и вязкость масла в полости корпуса 10, и частота собственный колебаний виброгасителя.
Очевидно, что все способы адаптивного виброгашения, реализуемые в виде описанных конструктивных схем, имеют свои достоинства и недостатки и неравноценны. В связи с этим представляет
интерес их сравнительный анализ, позволяющий определить либо
наилучший способ, либо область целесообразного применения того
или иного из них.
Сформулируем основные критерии сравнения. Первый из них —
область работоспособности. Это способность гашения вибраций, направленных горизонтально, вертикально либо к горизонтали или вертикали под углом. Второй — сложность конструктивной реализации
способа при современной конструкторско-технологической базе. Третий — возможные относительные габаритные размеры виброгасителя,
использующего тот или иной способ, при этой же базе. Четвертый —
относительное быстродействие (относительная продолжительность
реагирования виброгасителя на изменение сигнала датчика частоты).
И, наконец, пятый — энергоэкономичность, необходимость применения тех или иных источников энергии, их относительная потребляемая мощность и т. п.
Для проведения сравнения по перечисленным критериям был использован метод экспертных оценок [30]. Экспертам были представлены конструктивные схемы, приведенные на рис. 5.7, и предложено
оценить их, выставляя плюсы за их положительные качества и минусы за отрицательные. Уровень каждого качества нужно было оценить
соответствующим числом плюсов или минусов. Результаты сравнения
представлены в табл. 5.3.
115
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Таблица 5.3
Результаты экспертной оценки способов построения адаптивных виброгасителей
Критерий сравнения
Возможность гасить колебания
в разных направлениях
Простота конструкции
Габаритные размеры
Быстродействие
Энергоэкономичность
а
–
Схема виброгасителя (рис. 5.7)
б
в
г
д
+
++++ – –
++ – – –
+++
–
++
+
е
+
+
+
+
++
+
+
–
+
––
––
––
+++
+++
++
++
–
–
–––
–––
Из таблицы, даже без специальной математической обработки полученных данных, сразу видно следующее. Наибольшее число плюсов,
причем равное, получили виброгасители, построенные по схемам, изображенным на рис. 5.7, а и 5.7, д; за ними — на рис. 5.7, в. Проще всех
реализуется способ, иллюстрируемый рис. 5.7, а, однако он применим для гашения только одних вертикальных колебаний, на что эксперты, видимо, обратили внимание. Остальные виброгасители, в т. ч.
показанный на рис. 5.7, д, пригодны для устранения вибраций также
только одного направления, но оно может быть любым — нужно лишь,
чтобы ось виброгасителя с ним совпадала. Таким образом, наилучшим
способом адаптивного виброгашения, по мнению экспертов, является способ, реализуемый по рис. 5.7, д. Если же требуется гасить вертикальные вибрации, то — по рис. 5.7, а. Что касается схем по рис. 5.7,
б, г, е, то из-за множества недостатков, обнаруженных в них экспертами, их вряд ли можно считать удовлетворительными.
Проведенное сравнение дает основания для выбора способа адаптивного виброгашения в каждом практическом случае. Однако руководствоваться только этими основаниями было бы недостаточно.
Важную роль в процессе выбора приемлемого способа, несомненно,
должны играть диапазоны частот, в которых могут работать виброгасители, и чувствительности виброгасителей по отношению к параметрам, через которые регулируются их собственные частоты.
В общем случае чувствительность всякого технического устройства по отношению к изменению какой-либо его характеристики есть
первая производная его выходного параметра по этой характеристике. Отсюда следует, что чувствительность виброгасителя по отношению к изменению массы будет
116
5.3. Устранение вибраций механизмов экскаватора путем применения адаптивных виброгасителей
m f
k 2 2mc
,
m 4 m2 4 mc k 2
(35)
по отношению к изменению жесткости —
1
f
,
c 2 4 mc k 2
по отношению к изменению коэффициента вязкого трения
c (36)
1
f
.
(37)
k
4 m 4 mc k 2
Задавшись значениями величин, входящих в формулы (35)–(37),
в соответствии, например, с табл. 5.4, нетрудно построить графики,
иллюстрирующие зависимости чувствительности и частоты собственных колебаний виброгасителей, реализующих различные способы регулирования (рис. 5.8, 5.9).
k Таблица 5.4
Значения величин в формулах (33)–(37), принятые при построении графиков
Рис.
5.8, а
5.8, б
5.8, в
5.9, а
5.9, б
5.9, в
μ
0,1
0,1
0,1
0,1–7,0
0,1
0,05 –7,00
h
0,01
0,01
0,01
0,01–0,10
0,05
0,005–0,100
F
5
5
5
100
100
100
m
0,1–2,0
0,1–2,0
0,1–2,0
0,1
0,1–2,0
0,1
c
1000–100 000
1000–100 000
1000–100 000
100 000
1000–100 000
100 000
Анализ этих графиков позволяет установить, что высокой чувствительности виброгасителя, при регулировании путем изменения
массы (рис. 5.8, б), можно достичь при условии достаточно большой
жесткости и малой массы; при регулировании путем изменения жесткости (рис. 5.8, в) — при условии малой жесткости и малой массы;
при регулировании путем изменения коэффициента вязкого трения
(рис. 5.9, б, в) — при условии малой жесткости и большой массы, малых зазоров и больших вязкостях. В таком случае оказывается, что частоты, соответствующие наибольшим чувствительностям, при регулировании путем изменения массы относительно высокие и средние;
при регулировании путем изменения жесткости относительно низкие
(рис. 5.8, а), а при регулировании путем изменения коэффициента вязкого трения (рис. 5.9, а) относительно высокие.
117
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
а
f, Гц
m, кг
с, Н/м
б
df/dm,
1/(c·кг)
m, кг
с, Н/м
в
df/dс,
c/кг
m, кг
с, Н/м
Рис. 5.8. Зависимость частоты собственных колебаний от массы и жесткости (а)
и чувствительности по отношению к изменению массы (б) и жесткости (в)
118
5.3. Устранение вибраций механизмов экскаватора путем применения адаптивных виброгасителей
а
f, Гц
µ,
Па·с
h, мм
б
df/dk,
c/кг2
m, кг
с, Н/м
в
df/dk,
c/кг2
µ,
Па·с
h, мм
Рис. 5.9. Зависимость частоты собственных колебаний от вязкости масла
и ширины щели (а) и чувствительности по отношению к изменению
коэффициента вязкого трения k (б), вязкости масла и ширины щели (в)
119
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Это означает, что виброгасители, построенные по схеме, показанной на рис. 5.7, а, наиболее целесообразно применять для гашения вибраций в области высоких и средних частот; по схеме, показанной на рис. 5.7, в, — в области низких частот; по схеме, показанной
на рис. 5.7, д, — в области высоких частот. Если при выборе виброгасителя учитывать, что приводы экскаватора обычно создают высокочастотные и среднечастотные колебания, а металлоконструкции (например, стрела) — низкочастотные, то эффективность устранения
вибрации агрегатов экскаватора можно существенно повысить.
5.4. Прогрессивные конструкции ковшей активного действия
Предотвращение резонанса и улучшение динамических качеств роторных экскаваторов — только часть задач, решаемых специалистами
по проектированию и эксплуатации таких машин. В настоящее время
перед ними остро стоят и другие проблемы, например такие, как ведение землеройных работ в зонах грунтов повышенной твердости. Для
ведения подобных работ зачастую применяются экскаваторы с так называемыми ковшами активного действия.
Указанные ковши помимо своей основной функции — резания
грунта с отделением стружки, подъема и отвала последней — реализуют еще и дополнительные функции, облегчающие выполнение основной: размягчение грунта, его рыхление или дробление. Для осуществления дополнительных функций, ковши снабжаются специальными
конструктивными элементами и, разумеется, усложняются, однако это
расширяет их технологические возможности и при грамотном их применении повышает производительность земельных работ.
Рассмотрим некоторые типичные конструкции ковшей активного
действия и разграничим современные области их применения.
Одними из первых являются такие ковши с перфорированными
днищами и стенками, через отверстия в которых подается сжатый воздух [31]. Они разработаны в Московском автомобильно-дорожном техническом университете и предназначены для использования при строительстве транспортных магистралей в условиях Севера. В их состав
входит компрессор, а иногда и устройство подогрева воздуха. При копании, грунт в них в некоторой степени размягчается, но их эффек120
5.4. Прогрессивные конструкции ковшей активного действия
тивность определяется главным образом за счет уменьшения трения
грунта о поверхности ковша и снижения затрат энергии на деформации сдвига внутри грунта.
Для дальнейшего повышения эффективности сконструировали
ковш с пустотелым дном, через которое пропускается горячий газ, являющийся продуктом сгорания воздушно-керосиновой смеси в специальной камере [32]. Газ нагревает дно и выходит между зубьями ковша через сопла-отверстия, направленные в сторону копания грунта.
Сопла, через которые подается рабочий агент (газ или жидкость)
в зону взаимодействия ковша активного действия, применяются довольно часто и представляют собой не только простые отверстия,
но иногда и самостоятельные конструктивные элементы. Так, фирмой
«М. А. Н. Машиненфабрик Аугсбург-Нюрнберг АГ» предложено их выполнять в виде вставок в дно и в боковые стенки ковша, причем часть
из них закреплять неподвижно, а часть — с возможностью качания [33].
Диаметр выходных отверстий сопла — 05–2 мм; служат они для подачи
воды от насоса высокого давления (500–1000 бар и более). Ковш снабжен не зубьями, а режущими лезвиями, и струи воды из сопел образуют своеобразные иглы, совокупное действие которых отражает действие лезвий по всей длине каждого из них. Во избежание замерзания
воды в процессе эксплуатации ковша при низких температурах, в нее
добавляют антифриз, а трубопроводы, соединяющие насос с соплами,
теплоизолируют и в ряде случаев подогревают. Для усиления воздействия воды на грунт, в нее вводят полимеры с длинными цепными молекулами. Примешивание полимеров осуществляют с помощью управляемого дозатора, расположенного перед насосом высокого давления.
Как показывает производственный опыт, ковши, подобные описанным, можно применять успешно при копании мерзлых супесей
и суглинков при температурах до –14 °C [34]. Они переводят копаемые
грунты из категории мерзлых в категорию талых, превращают в глинистое тесто, уменьшают их липкость. Если же требуется разрабатывать
мерзлые суглинки при температурах ниже –14 °C, глинистые грунты
с низкой влажностью, содержащие плотные конгломераты, то целесообразнее использовать ковши активного действия с механическими
элементами-рыхлителями. На рис. 5.10 показан рабочий орган роторного экскаватора с такими ковшами, сконструированный на кафедре
«Подъемно-транспортные машины и роботы» Уральского федерального университета [35].
121
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Рис. 5.10. Рабочий орган роторного экскаватора с ковшами,
оснащенными рыхлителями
Рабочий орган включает в себя раму 1 и ротор 2 с ковшами 3. На боковых стенках ковшей закреплены оси 4, на которых установлены режу122
5.4. Прогрессивные конструкции ковшей активного действия
щие элементы в виде дисковых ножей 5, имеющих клиновидный обод.
Чтобы включить в работу боковые стенки ковшей, ножи на осях 4 установлены и за их пределами, а для предотвращения зажатия грунта между
ножами, в промежутках между ними размещены выталкиватели 6. При
работе экскаватора дисковые ножи внедряются в грунт от усилия подачи и вращаются в направлении, противоположном вращению ротора,
разрезая грунт. Врезаясь в грунт и захватывая его, они разрыхляют его,
он оказывает меньшее сопротивление движению относительно стенок
и дна ковша и легче его заполняет. Наряду с этим, ножи обеспечивают более высокую долговечность ковшей, чем зубья, поскольку при их
вращении их режущие лезвия непрерывно обновляются.
В отличие от ковшей с рыхлителями, предназначенных для разработки грунтов средней прочности, для разработки крепких трещиноватых горных и им подобных пород, имеющих прочность порядка
80 МПа, применяют ковши активного действия, оснащенные разного
типа ударниками. Наиболее распространены ковши с пневматическими ударниками, аналогичные изображенному на рис. 5.11, конструкции ПКБ Главстроймеханизации Минтрансстроя (ныне компания
«Трансстрой»).
4
17
5
3
6 7 8 9 10
2
1
2
1
18
20
11
12
16 15 14
19
13
Рис. 5.11. Конструкция ковша активного действия с пневматическими ударниками:
1, 18 — боковые пояса; 2 — труба; 3, 7, 8 — листы; 4 — бобышки; 5 — ребра; 6 — распорки;
9 — воздушный коллектор; 10 — патрубок; 11, 12 — листы с направляющими; 13 — съемные
стенки; 14 — ковш; 15, 16 — втулка с обоймой ударника; 17 — проушины; 19, 20 — пластины
123
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Корпус этого ковша состоит из двух боковых поясов (правого 1
и левого 18), соединенных друг с другом трубой 2. В нижней части ковша 14 имеется полость для установки ударников. К трубе 2 приварены
проушины для присоединения ковша к ротору экскаватора, состоящие
из листов 3, бобышек 4 и ребер 5. Задняя стенка ковша состоит из листов 7 и 8, образующих каналы для подвода сжатого воздуха к пневмоударникам и сброса отработанного воздуха в атмосферу. В верхней
части задней стенки ковша размещен воздушный коллектор 9 с патрубком 10 для подсоединения пневмопровода. К коллектору приварены проушины 17 с распорками 6. Ударники установлены в гильзах. В передней части каждой гильзы приварена втулка 15 с обоймой
16 ударника. На гильзах закреплены пластины 19 и 20, увеличивающие жесткость конструкции. В листе 11 в нижней части ковша имеются направляющие 12, куда входят патрубки ударников. Для обслуживания последних предусмотрены съемные стенки 13.
Ряд отечественных предприятий выпускает ковши с пневмоударниками МК‑4, МК‑5, МК‑6, МК‑8 (табл. 5.5). Создаются и новые конструкции подобных ковшей, однако всем им присущи общие
недостатки. Основные из них — высокий уровень шума, значительное энергопотребление и невозможность перенастройки закона движения ударника. Их в определенной степени лишены ковши с магнитострикционными и гидравлическими ударниками.
Таблица 5.5
Показатели пневмоударников
Показатель
Энергия удара, кДж
Частота ударов в минуту
Масса ударника, кг
Ударная мощность, кВт
Рабочее давление сжатого воздуха, МПа
Подача компрессора, м 3/мин, не менее
МК‑4
1,00
570
23,6
9,34
0,6
9
МК‑5
1,25
440
27,0
9,9
0,6
9
МК‑6
1,50
395
70,0
10,1
0,6
9
МК‑8
1,85
360
63,4
10,9
0,6
9
Конструктивная схема ковша с магнитострикционным ударником,
предложенная в Санкт-Петербургском архитектурно-строительном университете [36], приведена на рис. 5.12. Так же как и пневмоударник,
в этом ковше 3 ударник 9 установлен на дне ковша. Он включает в себя
стержень 4 с зубом 1, волновод 7, припаянный к сердечнику 8, изготовленному в виде набора никелевых полос, и обмотку возбуждения 10.
124
5.4. Прогрессивные конструкции ковшей активного действия
3
1
2
17
4
5
6
7 8
9
10 11
12 13
14
15
2
16
Рис. 5.12. Ковш с зубьями, вибрирующими от магнитострикции:
1 — зуб; 2 — штуцер; 3 — ковш; 4 — стержень; 5 — бурт; 6, 14 — крышка; 7 — волновод;
8 — сердечник; 9 — ударник; 10 — обмотка; 11 — корпус; 12 — выступ; 13 — антифрикционная прокладка; 15 — электроразъем; 16 — коллектор; 17 — козырек
Для упрощения монтажа, ударник установлен в разъемном корпусе 11 и закреплен в нем с помощью кольцевого бурта 5 и крышки
6, состоящей из двух половин. В корпусе имеются два полукольцевых
выступа 12, на которые опирается сердечник 8 через антифрикционные прокладки 13. Со стороны, противоположной зубу 1, ударник закрыт крышкой 14, в которой расположены электроразъем 15 и штуцер
2 для подвода охлаждающей жидкости от коллектора 16, соединенного
с внешней гидромагистралью, огражденной защитным козырьком 17.
При эксплуатации экскаватора в обмотку 10 подается переменное
напряжение, длина сердечника 8 периодически изменяется, и зуб 1 вибрирует, дробя копаемую породу.
Процесс вибрации сопровождается возникновением стоячей волны переменной амплитуды. Ее параметры выбраны так, чтобы режущая кромка зуба находилась в зоне максимальной амплитуды, а ее нулевые значения соответствовали расположениям крышки 6 и выступов 12
(см. рис. 5.12). Это предотвращает передачу колебаний на корпус ковша
и делает его работу более надежной и экономичной, чем ковшей с пневмоударником. Вместе с тем такой недостаток, как невозможность перенастройки закона движения ударника, у ковша с магнитострикци125
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
ей остается. Он отсутствует у ковша с гидроприводом, разработанным
в Самаркандском архитектурно-строительном институте [37] (рис. 5.13).
Рис. 5.13. Гидропривод вибрирующих зубьев ковша
Гидропривод (рис. 5.13) содержит двигатель 1 и гидронасос 2 специальной конструкции, соединенный трубопроводами 3 с цилиндром-возбудителем 4. Поршень 5 цилиндра через шток 6 соединен
с зубьями 7 ковша 8 посредством жестких стержней 9. Для подпитки гидропривода на случай утечек, в него через обратные клапаны
10 включен гидробак. Для защиты от перегрузок имеются обратные
клапаны 11 и предохранительный клапан 12.
Специфическим элементом конструктивной схемы гидронасоса 2
(рис. 5.14) является установленный внутри корпуса 3 вал 4 с эксцентриком 5. Профиль эксцентрика выполнен в виде сердечка и выбран
так, чтобы контактирующие с ним под действием пружин 6 поршни 2,
при его вращении, нагнетали жидкость по трубопроводам 1 в опре126
5.4. Прогрессивные конструкции ковшей активного действия
деленном порядке. Последний обеспечивает периодический закон
движения стержней 9 (см. рис. 5.13) и зубьев 7 ковша. Эксцентрик 5
(см. рис. 5.14) сделан сменным и, заменяя его тем или иным (с той или
иной геометрией), можно перенастраивать закон движения зубьев 7
(см. рис. 5.13). Это иллюстрирует рис. 5.15, где А — текущее перемещение ковша х со скоростью V = 0,2 м/с; амплитуда a = 0,006 м и период колебания зубьев 7, T = 0,03 с; В — закон их движения при αвыст
эксцентрика, равном 20°; С — закон движения при αвыст = 180°; D — закон равномерного движения. Каждому из этих законов соответствует
свое время врезания tвр зубьев в грунт. Для закона В tвр = tВ = 0,0015 с,
для закона D tвр = tD = 0,007 с.
1
6
1
2
2
5
4
3
Рис. 5.14. Конструктивная схема гидронасоса:
1 — трубопровод; 2 — поршни; 3 — корпус; 4 — вал; 5 — эксцентрик; 6 — пружины
При копании одних грунтов целесообразно обеспечивать одно tвр,
при копании других — иное, что позволяет более эффективно использовать экскаватор, чем машины с ковшами, оснащенными ударниками,
сконструированными ранее. Обусловлено это тем, что тяговая сила Q
прилагается к ковшу согласно закону сохранения импульса сил [38] при
разных сопротивлениях грунта разрушению Р и зависит от tвр как
Pt
Q = вр ,
T
127
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
где T — период колебаний ударника. Рационально выбирая tвр, можно уменьшать значение требуемых величин Q.
Рис. 5.15. Иллюстрация закона движения зубьев ковша с гидроприводом
С расширением промышленного производства компактных приводных устройств, в частности электродвигателей с печатным ротором
и им подобных, начали появляться и ковши с ударниками, работающими от таких двигателей. Схема одного из них, ориентированного
на применение в маломощных экскаваторах, показана на рис. 5.16.
Указанный ковш [39] включает в себя днище 3, заднюю 1 и боковые 2
стенки и зубья 6, жестко закрепленные на стержнях 10, установленных на днище 3 параллельно боковым стенкам в опорах продольного
скольжения 7 с возможностью осевой вибрации.
Ковш снабжен кулачковым валом 9, закрепленным в опорах вращения 13 (опора вала на днище условно не показана) на днище 3 и в боковых стенках 2, приводом вращения 14, кинематически связанным
с валом 9. Каждый стержень 10 выполнен с выступом 4, взаимодействующим с одним из кулачков 5 вала, и снабжен пружиной 12, одним
концом опирающейся на заднюю стенку 1, а другим — на поверхность
стержня 10, перпендикулярную его оси, при этом профиль кулачка 5
выполнен в виде архимедовой спирали.
128
5.4. Прогрессивные конструкции ковшей активного действия
1
2
3
4
5
10
4
9
5
3
13
2
14
9
12
11
10
8
7
6
Рис. 5.16. Конструктивная схема ковша
с электромеханическим кулачковым приводом:
1, 2 — задняя и боковая стенки; 3, 8 — днище; 4 — выступ; 5 — кулачок; 6 — зубья; 7 — опоры;
9 — вал; 10 — стержни; 11 — задняя стенка; 12 — пружины; 13 — опоры вращения; 14 — привод
Привод 14, представляет собой плоский регулируемый электродвигатель (типа велосипедного мотор-колеса), соединенный с валом 2 напрямую.
Для того чтобы защитить стержни 10 и сопряженные с ними элементы, установленные на днище 3 ковша, ковш снабжен дополнительным дном. При необходимости с торцов приводов 14 могут быть установлены защитные щитки.
В процессе эксплуатации ковша, привод 14 вращает вал 9 по часовой стрелке. Кулачки 5 воздействуют на выступы 4, заставляют
стержни 10 плавно перемещаться в сторону задней стенки 11 ковша,
сжимая пружины 12. Совершив оборот, кулачки 5 освобождают от нажатия выступы 4, и стержни, под действием пружин 12, резко перемещаются сами со связанными с ними зубьями 6 в направлении грунта. Движение зубьев происходит по пилообразному закону. Диапазон
вибрации зуба определяется профилем кулачков 5, энергия удара Э,
Дж, — пружиной 12, зависит от жесткости пружины
1 222
ql t,
2m
где m — масса стержня с зубом, кг; q — жесткость пружины, кг/см 2;
l — деформация пружины кулачком, м; t — время перемещения зубьев в направлении грунта, с. Частота ударов определяется по скорости вращения привода 14.
Э=
129
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Ковши с ударниками, построенными по предложенной схеме, могут быть реализованы как в описанном виде, так и в усовершенствованном. Последнее осуществимо по-разному. Для регулирования энергии удара, например, на стержни 10 могут устанавливаться сменные
кольца-грузы. В полость между основным 3 и дополнительным 8 днищами ковша может подаваться горячий газ, например выхлопной газ
дизеля тягача экскаватора. Его температура, как известно, достигает 400–500 °C. Для повышения долговечности ковша, ковш может
быть снабжен элементами снижения трения в зоне контакта выступов 4 и кулачков 5, например износостойким покрытием. Возможны
и иные варианты дальнейшего развития рассмотренной конструкции
ковшей активного действия.
Впрочем, существуют конструктивные варианты и других описанных выше ковшей. Можно выделить два перспективных направления их развития: специализация и универсализация ковшей. Первое преследует цель повышения эффективности экскавации вполне
определенных грунтов, второе — разнообразных грунтов, обладающих принципиально различными свойствами. Каждому ли из них
принадлежит будущее или они вместе останутся перспективными —
время покажет.
5.5. Оптимальное управление
ударниками ковша активного действия
Процесс разработки твердых и мерзлых грунтов экскаваторами, как
известно, сопровождается значительными энергозатратами [2]. Для
их снижения применяют разные методы, в т. ч. использование ковшей активного действия, в частности, снабженных ударниками, подобных описанным выше. Ковши с ударниками рациональной конструкции позволяют уменьшить потребную силу тяги, прилагаемую
стрелой экскаватора к ротору, что сокращает затраты энергии на работу соответствующих приводов экскаватора [12, 13]. Вместе с тем такие
ковши сами являются потребителями энергии. В связи с изложенным
возникает задача минимизации энергопотребления ковшей активного
действия, оснащенных ударниками, которая может быть решена путем оптимального управления режимами их работы.
130
5.5. Оптимальное управление ударниками ковша активного действия
Пусть экскаватор должен прокопать трассу, состоящую из P участков, грунт на каждом из которых, согласно предварительно проведенным инженерным изысканиям, обладает определенными характеристиками. Как следует из материалов работы [40], энергия (Дж),
потребляемая ударником в таком случае, с точностью, достаточной
для инженерных расчетов, может быть определена как
i SU i ksi Ci2
A ,
2Vi k Ei
i 1
P
(38)
где δi — требуемая глубина внедрения ударника в грунт на i‑м участке, м; S — площадь контакта бойка ударника с грунтом, м 2; Ui — скорость распространения продольной волны в грунте на i‑м участке,
м/с; ksi — коэффициент, зависящий от поперечной упругости грунта на i‑м участке; Ci — число ударов плотномера ДорНИИ, соответствующее грунту на i‑м участке; Vi — скорость удара бойка ударника
о грунт на i‑м участке, м/с; kα — безразмерный коэффициент, учитывающий угол заострения бойка; Ei — динамический модуль упругости
грунта на i‑м участке, Па.
Для упрощения выражения (38) обозначим:
S
В — характеристика бойка ударника, В ;
k
Ri — характеристика режима работы ударника на i‑м участке грун´
та, Ri = i ;
2Vi
U
Gi — характеристика грунта на i‑м участке, Gi i Ci2 ksi.
Ei
Выражение (38) примет вид
P
P
i 1
i 1
A BRi Gi B � Ri Gi .
(39)
Предположим, что среднее значение характеристики режима работы ударника на протяжении всей прокапываемой трассы, исходя
из требуемой производительности экскаватора, задано и равно R . Среднее значение характеристики грунта на протяжении трассы известно
и равно � G . При таком предположении правомерно считать, что
131
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
P
P �� R Ri const,
i 1
(40)
P
P � � G Gi const.
i 1
Найдем условия минимума (39) при ограничениях (40). Представим их для этого как
P
P
i 1
i 1
Ri Gi const
или как
P
P
P
P
ln � R ln� G ln � R � ln � G Z
i
i 1
i
i 1
i 1
i�
i
i 1
i
T const.
(41)
Выражение (39) при этом примет вид
P
A B e Z i .
i 1
(42)
Воспользуемся методом неопределенных множителей Лагранжа [41], полагая, что минимум (42) определяется по минимуму входящей в него суммы.
Составим функцию
P
P
F e Z i � T Z i ,
i 1
i 1
где λ — неопределенный множитель Лагранжа, и вычислим ее производную по Z i
dF
e Z i .
dZ i
Приравняв ее нулю, получим ln Z i.
В таком случае
P
Т ln P ln PZ i ,
i 1
откуда
T
�,
P
т. е. сумма в выражении (42), а следовательно, и A минимальны при
Zi =
Zi 132
1 P
1 P
R
ln
ln Gi .
i P
P i 1
i 1
(43)
5.5. Оптимальное управление ударниками ковша активного действия
Подставляя Z i из формулы (41), выразим уравнение (43) как
1 P
1 P
ln
�
R
ln � Gi ln
� Gi
i P
P i 1
i 1
ln � Ri � или, после потенцирования, как
Ri P
P
1 P
1 P
� P R�i P Gi � P Ri G� i .
Gi i 1
Gi i 1
i 1
i 1
P
P
i 1
i 1
(44)
Величину P Ri Gi , входящую в формулу (44), можно упростить
путем несложных преобразований:
P
P
P
i 1
i 1
Ri Gi � Ri G� i ,
P
P
P
P
R G � R G� ,
P
i 1
P
i
i 1
i
i
i 1
P
P
i 1
i 1
Ri Gi i
i 1
1 P
� Ri G� i .
P i 1
(45)
Подставив выражение (45) в уравнение (44), получим
Ri 1 P
R P
R
R
G
�
� Gi � � PG ,
i i
Gi P i 1
Gi P i 1
Gi P
откуда окончательно следует
Ri R G
.
Gi
(46)
Выражение (46) может являться основой алгоритма оптимального управления ударниками ковша активного действия, в частности
такого, как изображен на рис. 5.17. В этом алгоритме Li — длина i‑го
участка трассы, подлежащей разработке экскаватором; «Выбор Li» —
оператор выбора Li из числа введенных и начала перемещения экскаватора вдоль i‑го участка трассы; «LTi = ?» — оператор измерения текущего перемещения экскаватора вдоль i‑го участка.
Вычисленное Ri при фиксированном δi (в общем случае получаемое за один или n циклов работы ударника) обусловливает соответствующее значение Vi, которое может быть подано на блок управления ударником в виде задающего сигнала.
133
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Начало
Ввод R, P, G={G1, G2, …, GP},
L={L1, L2,…,LP}
Расчет G
i=1
Выбор Gi
Расчет Ri
Вывод Ri
Выбор Li
LTi =?
нет
LTi = Li
да
i=i+1
i=P+1
нет
Конец
Рис. 5.17. Алгоритм оптимального управления ударниками
ковша активного действия
134
5.6. Сокращение потребляемой мощности приводов экскаватора
Совокупность всех Vi при копании трассы обеспечит требуемую
производительность экскаватора, но каждое Vi при этом с точки зрения оптимизации энергозатрат на работу ударника будет минимально необходимым.
5.6. Сокращение потребляемой мощности приводов экскаватора
и повышение его производительности
У современных роторных экскаваторов, применяемых, например,
при строительстве магистральных газо- и нефтепроводов, мощность
привода ротора может достигать большого значения: 100 и более киловатт. Актуальной задачей, возникающей в связи с этим, является
снижение мощности привода ротора и создание рабочего органа экскаватора, обеспечивающего это.
В процессе работы экскаватора приводу его ротора приходится преодолевать значительные силы сопротивления, из которых главная —
сила сопротивления грунта копанию P. Указанная сила, как известно
из классической литературы по землеройным машинам [2, 14], может
быть определена по формуле Н. Г. Домбровского
P = Kbh,
где K — удельное сопротивление грунта копанию, Н/м 2; b и h — соответственно ширина и толщина срезаемого ковшами пласта грунта, м.
Уменьшив h или разделив ее между ковшами, значение P можно уменьшить. Однако просто уменьшая h, приходится уменьшать и производительность экскаватора. Деление же h между ковшами может не повлечь за собой снижения производительности.
Учитывая изложенное, задача, сформулированная выше, технически может быть решена за счет того, что рабочий орган траншейного
экскаватора, который состоит из ротора, выполненного в виде колеса диаметром D с приводом вращения, и из n ковшей, размещенных
вокруг колеса и соединенных с ним, отличается от обычных роторов
тем, что координаты размещения ковшей относительно центра ротора определены из соотношений
R
2
D
R0 H ; 0 ; j i 1 j 1; Ri Ri 1,
2
n
Ri
135
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
где R0 — расстояние режущих кромок ковша минимальной высоты
от центра ротора; H — минимально допустимая высота ковша; α 0 —
угловой шаг между ковшом с номером 1 и ковшом, предшествующим
ему; α j — угловой шаг между i‑м и (i −1)-м ковшами; j — порядковый
номер углового шага между ковшами j 0, равный 1, 2, …, n–2, отсчитываемый против направления вращения ротора; Ri — расстояние
режущих кромок i‑го ковша от центра ротора; i — порядковый номер
ковша с Ri > R0, равный 1, 2, …, n–1.
Схема предлагаемого рабочего органа траншейного экскаватора,
спроектированного на основе указанных соотношений, приведена
на рис. 5.18, где изображено его колесо с n = 6 ковшами (привод колеса условно не показан).
11
10
12
4
3
5
9
2
6
0
1
7
8
Рис. 5.18. Рабочий орган экскаватора с неравномерным расположением ковшей
136
5.6. Сокращение потребляемой мощности приводов экскаватора
Цифрами 0–5 на рис. 5.18 обозначены расстояния R0 , R1, R2, R3, R4 ,
R5 режущих кромок ковшей от центра ротора, цифрами 6 и 7 — соотD
ветственно величины и H, цифрами 8–12 — угловые шаги α0, α1, α2,
2
α3, α4 между ковшами. При изображении принято: D =100 %; H ≈ 25 %
D
от ; расстояние Ri последовательно увеличивается на 3 % от R0 . Угло2
вые шаги между ковшами таковы: 0 100 %, 1 97 % от α0, 2 94,3 %
от α0, 3 91, 7 % от α0, 4 89,3 % от α0. Широкой стрелкой на рис. 5.18 показано направление вращения ротора при эксплуатации экскаватора.
В процессе эксплуатации рабочего органа экскаватора, пласт грунта, срезаемого ковшом, получается из двух составляющих, определяемых вращением ротора и движением подачи экскаватора вдоль траншеи. Вторая составляющая осуществляется с помощью тягача,
поэтому мощность привода вращения ротора экскаватора расходуется главным образом на срезание первой составляющей срезаемого пласта. Чем меньше толщина этого пласта, тем меньше затрачиваемая
мощность. В случае рассмотрения предлагаемого рабочего органа, показанного на рис. 5.18, пласт грунта, подлежащий срезанию, имеющий некоторую толщину L, делится между n = 6 ковшами на слои одинаковой толщины и длины. Если при использовании обычных роторов
сила сопротивления грунта копанию, действующая на каждый ковш
при вращении ротора, была равна P = KbL, то у ротора, приведенного
1
на рис. 5.18, она P = KbL. Поскольку толщина и длина срезаемых сло6
ев грунта при этом остаются одинаковыми, объемы слоев, срезаемых
ковшами при работе ротора, тоже одинаковы. Это в процессе эксплуатации ротора не нарушает его первоначальную балансировку. (Такая
балансировка при изготовлении роторов экскаваторов обязательна!)
Разумеется, при работе траншейного экскаватора с описанным рабочим органом может возникнуть необходимость увеличения подачи
(скорости V его движения вдоль траншеи), но существенного увеличения потребляемой мощности тягача, осуществляющего подачу, это
за собой не повлечет, т. к. зависимость PV = const при снижении Р допускает пропорциональное увеличение V.
Интересным вариантом решения задачи сокращения потребляемой мощности приводов и повышения производительности экскаватора является конструкция, описываемая ниже [43].
137
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Конструктивная схема экскаватора с перечисленными элементами приведена на рис. 5.19. В соответствии с ней рабочее оборудование включает в себя шарнирно соединенную с тягачом 1 раму 25
ротора 23 с ковшами 24, механизм привода ротора, выполненный из гидроцилиндра 13, установленного горизонтально, и дополнительного
гидроцилиндра 14, шарнирно закрепленных на раме 25. Штоки гидроцилиндров соединены соответственно с вертикальным 18 и горизонтальным 17 рычагами. Указанное оборудование также содержит две
пары звездочек 21 и 20, установленных на ведомом 26 и ведущем 16 валах и соединенных двумя тяговыми цепями 19 с роликовыми захватами 10. На ведущем валу 16 установлены две обгонные муфты 15, их наружные полумуфты жестко соединены с рычагами 18 и 17. На раме 25
установлен отвальный транспортер 22.
11
2
12
13
14
3
1
4
5
10
9
6 7 8
19
21
26
18
17
20
15
16
25
24
23
22
Рис. 5.19. Рабочее оборудование экскаватора
Рама 25 соединена с тягачом 1 с помощью шарнира 4 через механизм
подачи, выполненный из двух штанг 8, которые с лафетом 7 образуют
телескопическую пару, двух барабанов 9, установленных на ведомом
валу 26, и двух тросов 6, одни концы которых закреплены в проушинах
5, а другие — запасованы на барабанах 9, причем барабаны 9 посажены
на вал 26 в комплекте с муфтами сцепления (не показаны).
138
5.6. Сокращение потребляемой мощности приводов экскаватора
Экскаватор работает следующим образом. При включении в работу, гидроцилиндры 13 и 14 через рычаги 18 и 17 и обгонные муфты 15
приводят в непрерывное вращение ведущий вал 16 и звездочки 20,
вследствие чего тяговым цепям 19 вместе с роликовыми захватами 10
сообщается движение. Питание гидроцилиндров 13 и 14 организовано
так, что, если шток гидроцилиндра 14 втягивается, в это время шток
гидроцилиндра 13, наоборот, выдвигается. Для того чтобы приводной
вал 16 вращался только в одном заданном направлении, обгонные
муфты 15 по отношению друг к другу установлены на валу 16 вразнобой. При движении тяговых цепей 19 роликовые захваты 10, двигаясь
по касательной к ротору 23, захватывают ковши 24 с тыльной. стороны и, двигаясь до выхода из взаимного зацепления, вращают ротор 23.
При этом те ковши, которые находятся в контакте с грунтом, разрушают (режут) его и заполняются им.
Подача ротора на забой может осуществляться в двух режимах.
При работе в слабых грунтах за счет движения тягача 1. При работе
в прочных или мерзлых грунтах, тягач 1 останавливается, и подача ротора на забой производится в автоматическом режиме с помощью механизма подачи следующим образом: барабаны 9 с помощью сцепных
муфт соединены с валом 26 и, вращаясь совместно с ним, выбрасывают
трос 6. При этом тягач стоит на месте, рама 25, а следовательно, и ротор 23 подтягиваются к тягачу со скоростью, зависящей от скорости
вращения ротора, которая в свою очередь зависит от сопротивления
грунта резанию. Чем слабей грунт, тем выше скорость резания, а чем
выше скорость резания, тем больше подача, и наоборот.
В транспортное положение экскаватор приводится в следующем
порядке. Рама 25 подтянута в крайнее положение к тягачу 1. Гидроцилиндр 2 выводится на проушину 11 и соединяется с ней с помощью
пальца. Затем, работая том же гидроцилиндре 2, рама экскаватора поворачивается относительно оси шарнира 4 до совмещения отверстия
в проушине 3 с отверстием в накладке 12. После установки пальца гидроцилиндр 2 может быть из работы выключен.
Как отмечают разработчики рассмотренного экскаватора [43], при
его применении сокращается мощность, потребляемая как его ротором, так и тягачом, примерно на 20 %. Что касается производительности, то она почти на столько же повышается. Однако описанное решение получилось с конструктивной точки зрения довольно сложным.
С учетом этого ведутся поиски более простых решений, позволяющих
139
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
уменьшить потребляемую мощность и повысить производительность
роторных экскаваторов. Одним из таких решений может стать автоматическое управление подачей экскаватора путем регулирования скорости
движения тягача. Основывается данное решение на известном описании производительности роторного экскаватора с помощью выражения
K
60qnz н ,
Kр
где q — емкость одного ковша ротора экскаватора; n — частота вращения ротора; z — число ковшей в роторе; Kн — коэффициент наполнения ковшей ротора,
Cz
Кн .
2R
Здесь C — подача экскаватора на ковш, определяемая по скорости движения тягача; R — радиус ротора по центру тяжести грунта в ковше.
Kp — коэффициент разрыхления грунта, отображающий его плотность.
Представим, что для экскаватора стоит задача разработки трассы,
состоящей из Р участков, каждому i‑му из них соответствует коэффициент разрыхления K рi . В таком случае производительность экскаватора при разработке всей трассы будет
П 60 � qz 2 P ni � Ci
.
2R i 1 K рi
(47)
Используя метод, примененный в п. 5.5, найдем условие максимума � ПΣ , полагая, что последний имеет место при максимуме суммы
в выражении (47). Предположим, что техническими характеристиками экскаватора обусловлены некоторые
P
P n ni const;
i 1
P
(48)
P C Ci const,
i 1
где n и C — средние паспортные значения этих характеристик, а грунту соответствует выражение
P
P
1
1
const,
K р i 1 K рi
где K р — среднее значение коэффициента K р будущей траншеи.
140
(49)
5.6. Сокращение потребляемой мощности приводов экскаватора
Из уравнений (48) и (49) следует
P
P
P
1
n C K
i�
i 1
и
P
P
P
i 1
i�
i 1
�i
i 1
i 1
const
рi
P�
1
ln n ln C ln K
i 1
�i
pi
(ln ni � ln C� i � ln
i 1
P
1
) Z i � T const � �.� (50)
K рi
i 1
P
Z
Сумма в выражении (47) в таком случае имеет вид e i .
i 1
С помощью метода неопределенных множителей Лагранжа [44]
P
Z
найдем условие максимума e i � � при ограничениях (48) и (49).
i 1
Составим функцию Лагранжа
P
P
i 1
i 1
F � e Z i (T Z i � ),
(51)
где λ — неопределенный множитель.
Продифференцировав выражение (51) по Z i �, получим
dF
e Zi dZ i �
и, приравняв производную нулю, найдем ln Z i . Это позволит записать
P
T � ln P ln Pzi
i 1
и
Zi� T 1 P
1 P
1 P
1
� � ln n� i ln Ci � ln � .
P P i 1
P i 1
P i 1 K рi
(52)
Подставляя Z i � из уравнения (50) в формулу (52), получим
� lnCi � 1 P
1 P
1 P
1
1
� � ln n� i ln Ci � ln
� � ln n� i ln
n
�.
K рi
P i 1
P i 1
P i 1 K pi
Пропотенцируем это выражение и будем иметь
Ci � K рi
ni
P
P
P
P
i 1
i 1
i 1
ni Ci 1
.
K рi
(53)
141
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
Проанализировав физический смысл последнего выражения, нельзя не заметить, что оно является условием минимума ПΣ, а не максимума. Действительно, при увеличении K рi , т. е. при росте плотности
грунта, Ci � , согласно выражению (53), тоже следует увеличивать, а при
увеличении ni � значение Ci � нужно уменьшать. Если бы выражение (53)
было условием максимума, то все должно было быть наоборот. Отсюда следует, что если уравнение (53) — условие минимума, то условием максимума будет
n
Ci � = Х i ,
(54)
K pi
где X — некоторый коэффициент пропорциональности, заменяющий
P
P
P
1
P ni Ci .
i 1
i 1
i 1 K pi
Найдем величину X. Для этого представим выражение (54) как
P
P
ni
C
X
,
i�
i 1
i 1 K pi
и выразим X как
X
р
C
.
р
ni
i 1
K рi
i 1 i �
(55)
Преобразуем последнее уравнение следующим образом:
P
C
C Kр
C� P
C P
.
P
P
ni
1
1
n
, n
P
, n i 1
i 1
K рi
K рi
K рi
i 1 i �
Это дает возможность представить выражение (54) окончательно как
C K р ni
Ci � .
(56)
n
K рi
Выражение (56) может служить алгоритмом управления подачей
на ковш экскаватора и позволяет построить систему управления скоростью движения его тягача по схеме, приведенной на рис. 5.20. На нем
1 — блок настройки отношения средней подачи на ковш к средней
скорости вращения ротора, которые определены по паспортным данным экскаватора; 2 — задатчик среднего значения коэффициента раз142
5.7. Автоматическое управление отвальным конвейером роторного экскаватора
рыхления грунта, в котором должна быть выкопана траншея, определенный по данным геологических изысканий; 3 — задатчик текущей
скорости вращения ротора; 4 — измеритель текущей плотности грунта
(например, ультразвуковой плотномер), установленный на раме экскаватора между тягачом и ротором; 5 — вычислитель текущего значения коэффициента разрыхления грунта; 6 — сглаживающий фильтр;
7 — блок умножения сигналов; 8 — блок деления сигналов; 9 — регулятор скорости движения тягача; 10 — привод тягача.
3
1
2
4
7
8
5
9
6
10
Рис. 5.20. Схема алгоритма управления скоростью движения тягача экскаватора
Такая система управления, при увеличении скорости вращения
ротора и при разработке менее плотных грунтов, обеспечит увеличение подачи экскаватора на ковш, а в противном случае — ее снижение. Водителю экскаватора придется самому задавать только текущее n,
а С и скорость тягача будет устанавливаться автоматически. Производительность экскаватора всегда будет оставаться постоянной, причем
наибольшей из возможных при его фиксированных технических характеристиках.
5.7. Автоматическое управление
отвальным конвейером роторного экскаватора
Применение систем автоматического управления — чрезвычайно
полезный способ совершенствования траншейных роторных экскаваторов. Он пригоден не только в случаях, подобных описанному выше, для
143
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
повышения производительности экскаватора за счет управления скоростью тягача, но и для регулирования режимов эксплуатации других
агрегатов экскаваторов. Он дает возможность снизить их аварийность,
уменьшить износ наиболее нагруженных элементов, а также, наряду
с рассмотренными ранее способами, сократить их энергопотреб­ление.
Убедительной иллюстрацией всего этого может служить применение системы автоматического управления отвальным конвейером роторного
экскаватора. Такая система может обеспечить работу конвейера с необходимой, но не обязательно максимальной скоростью. С ней конвейер
не будет работать «впустую», что прежде всего позволит снизить затраты на его эксплуатацию, в т. ч. на электроэнергию.
Остановимся на теоретических предпосылках построения указанной системы. Известно [10], что потребляемая конвейером мощность N расходуется в основном на сообщение грунту скорости (N1),
на подъем грунта на высоту выгрузки (N2), на трение грунта о боковые щитки конвейра и грунта по грунту в зонах щитков (N3) и на трение о фартуки конвейера (N4). Первая из этих составляющих может
быть определена как
ПVг2
N1 ,
(57)
2 3600 1000
где П — производительность отвального конвейера, м 3/ч; ψ — объемная масса грунта, кг/м 3; Vг — скорость движения грунта, приобретаемая последним под действием сил трения между ним и конвейерной
лентой, м/с.
Вторая составляющая рассчитывается как
ПgH
,
3600 1000
где g — ускорение свободного падения, м/с 2; H — высота подъема грунта конвейером в вертикальном направлении, м.
Третья составляющая вычисляется как
N2 f П2V л
N3 ,
3600 1000
где f — коэффициент трения грунта о сталь боковых щитков конвейера; Vл — скорость движения конвейерной ленты, м/с; а четвертая — как
N 4 = PV л,
144
5.7. Автоматическое управление отвальным конвейером роторного экскаватора
где P — потери окружного усилия привода ковейера на трение ленты
о фартуки, кН.
Экспериментально установлено, что величину P можно определить как
П
P = 1,5
,
(58)
3600Vг ba
полагая, что bа — часть ширины ленты конвейера, не закрытая фартуками, равная (0,75…0,80)bл, где bл — ширина ленты, м.
Путем экспериментов также выявлено [5; 10], что
V л Vг ,
λ и μ — величины, первая из которых лежит в пределах 1,0–1,2, а вторая близка к 1.
С достаточной для инженерных расчетов точностью Vг допустимо
выражать в виде
V
Vг л ,
(59)
что позволяет представить N 4 в виде
N 4 1,5
П
.
360ba
� л из выражения (59) и обоЗаменим Vг в формуле (57) величиной V
значим
A,
(60)
2 3600 1000 2
тогда
N1 = AПV л2.
Обозначим
и получим
Положим
gH
B
3600 1000
N 2 = B П.
f
C
3600 1000
(61)
145
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
и получим
N 3 = CП2V л.
Если далее ввести обозначение
1,5
D,
3600ba
то будем иметь
N AПV л2 BП CП2V л DП ,
(62)
где η — коэффициент полезного действия, учитывающий потери мощности в трансмиссии, подшипниках промежуточных опор и натяжного барабана конвейра.
Ясно, что N минимальна при минимуме выражения N ′, равного
стоящему в скобках формулы (62). Найдем экстремум этого выражения из условия
dN 2 AПV л CП2 0,
(63)
dV л
� л дает
Решение (63) относительно V
CП
.
(64)
2A
То, что выражение (64) соответствует минимуму (62), следует
из того, что
d 2N 2 AП 0.
dV л2
Vл Подставив в формулу (64) значения С из выражения (61) и А из (60),
найдем
f 2
Vл П.
(65)
Знак «–» в равенстве (65) имеет вполне конкретный физический
смысл, состоящий в том, что действия П и Vл противоволожны: П соответствует загрузке конвейера грунтом, а Vл — разгрузке.
Полученное решение найдено при условии (63), не учитывающем,
что при транспортировке грунта конвейером может изменяться hг —
высота грунтового потока на конвейере, м, т. е. оно справедливо для
тех случаев, когда траншейный роторный экскаватор работает в режимах, обеспечивающих невысокую производительность, когда колеба146
5.7. Автоматическое управление отвальным конвейером роторного экскаватора
ния hг не приводят к просыпанию грунта с конвейерной ленты и принципиального значения не имеют. Однако если это имеет значение, hг
должно быть постоянным. В таком случае в выражении (58) нужно использовать не формулу (59), а эмпирическую формулу
Vг =
П
.
3600ba hг
Подставив Vг из нее в выражение (58), получим
P 1,5 10 hг.
Обозначим 1,5 10 E , тогда N 4 = EhгV л и
N AПV л2 BП CП2V л EhгV л.
При этом минимум N ′ будет при условии
dN 2 AПV л CП2 Ehг 0,
dV л
откуда
CП2 Ehг
.
2 AП
Это выражение справедливо при заданном hг . Подставив сюда С,
Vл А и Е, окончательно получим
fП2
1,5 10 hг 3600 1000 2
3600 1000
fП2 2 3600 15000hг 2
Vл . (66)
П
П
При проектировании траншейного роторного экскаватора, его ротора и отвального конвейера, как правило, принимают
=
П П=
FVmax,
max
где F — площадь сечения траншеи; Vmax — наибольшая скорость линейного движения (подачи) экскаватора.
Однако в реальных условиях П ≠ Пmax , а зависит от реальной скорости вращения ротора n и коэффициента наполнения ковшей ротора
Kн C0 z
,
2R
(67)
147
5. Новые направления в проектировании и эксплуатации траншейных роторных экскаваторов
где � � C0 — подача экскаватора на ковш (C0 ⋅ z — подача на оборот ротора); z — число ковшей ротора; R — радиус ротора по центру тяжести
грунта в ковше.
Реальное
K
П = 60qzn н ,
(68)
Kр
где q — емкость ковша; n — частота вращения ротора; K р — коэффициент разрыхления грунта [15,45].
Теперь нужно подставить выражение (67) в (68) и выражение (68)
в (65) или в (66) и, в зависимости от n и � C0, найти V л. Основываясь на этом,
можно построить систему автоматизации управления конвейером.
Указанная система представляет собой систему регулирования скорости движения ленты отвального конвейера траншейного роторного экскаватора (рис. 5.21). Она включает в себя устройство 1 задания
скорости вращения n ротора ТРЭ, через регулятор скорости 2 связанное с приводом ротора 3, устройство 4 задания подачи � C0 экскаватора
на ковш, через регулятор скорости 5 связанное с приводом 6 тягача,
блок ввода 7 конструктивных параметров R, q и z ротора, блок 8 вычисления фактической производительности П экскаватора, блок 9 расчета скорости движения ленты V л , через регулятор скорости 10 соединенный с приводом 11 конвейера, и блок настройки 12 системы,
с помощью которого в нее вводятся значения λ, μ, f и, если потребуется, hг .
1
2
3
4
5
6
7
8
9
12
11
10
Рис. 5.21. Блок-схема системы автоматического регулирования скорости ленты
отвального конвейера траншейного роторного экскаватора
148
Контрольные вопросы и задания
Конвейер при такой системе будет работать каждый раз с необходимой, не обязательно максимальной скоростью — не будет работать
«впустую». Износ его снизится, снизится и энергопотребление.
Контрольные вопросы и задания
1. Назовите основные способы гашения вынужденных колебаний ротора многоковшового траншейного экскаватора.
2. Каким способом можно минимизировать вероятность резонанса при взаимодействии ковшей ротора с грунтом?
3. Дайте характеристику основных конструктивных схем адаптивных виброгасителей.
4. Как определяется частота вынужденных колебаний ротора?
5. Поясните принцип работы системы автоматического регулирования скорости ленты отвального конвейера.
6. Назовите область применения ковшей активного действия.
7. Каким способом можно оптимизировать энергозатраты при
разработке твердых и мерзлых грунтов?
149
Список библиографических ссылок
1. Давидович П. Я., Крикун В. Я. Траншейные роторные экскаваторы. М. : Недра, 1974.
2. Домбровский Н. Г. Многоковшовые экскаваторы. М. : Машиностроение, 1972.
3. Фрейнкман И. Е., Ильгинсосис В. К. Землеройные машины.
М. : Машиностроение, 1972.
4. Машины для земляных работ : учебник для студентов вузов
по специальности «Подъемно-транспортные, строительные,
дорожные машины и оборудование» / Д. Я. Волков [и др.] ; под
общ. ред. Д. П. Волкοва. Μ. : Машиностроение, 1992.
5. Справочник механика открытых работ. Экскавационно-транспортные машины непрерывного действия / под ред. М. И. Щадова и В. М. Владимирова. М. : Недра, 1989.
6. Экскаваторы и комплексы непрерывного действия для открытых горных работ. Отраслевой каталог 18-4-88. М. : ЦНИИТЭИ­
тяжмаш, 1988.
7. Лукашук О. А., Комиссаров А. П., Летнев К. Ю. Машины для
разработки грунтов. Проектирование и расчет : учебное пособие. Екатеринбург : Изд-во Урал. ун-та, 2018.
8. Машиностроение : энциклопедия. Машиностроение. Горные
машины. Т. IV‑24 / Ю. А. Лагунова, А. П. Комиссаров, В. С. Шестаков, С. В. Белов. М. : Машиностроение, 2011.
9. ГОСТ 21796–90. Экскаваторы непрерывного действия. Термины и определения. М. : Изд-во стандартов, 1990.
10. Абрамов Б. Н., Лукашук О. А. Многоковшовые экскаваторы:
проектирование и расчет : учебное пособие. Екатеринбург :
УрФУ, 2012.
150
Список библиографических ссылок
11. Домбровский Н. Г. Экскаваторы. М. : Машиностроение, 1969.
12. Зеленин А. Н., Баловнев В. И., Керов И. П. Машины для земляных работ. М. : Машиностроение, 1975.
13. Землеройные машины непрерывного действия / 3.И. Гарбузов
[и др.]. М. ; Л. : Машиностроение, 1965.
14. Федоров Д. И. Рабочие органы землеройных машин. М. : Машиностроение, 1989.
15. Ветров Ю. А. Резание грунтов землеройными машинами. М. :
Машиностроение, 1971.
16. Панкратов С. А. Динамика машин для открытых горных и земляных работ. М. : Машиностроение, 1967.
17. Подерни Р. Ю. Исследование нагрузок исполнительных органов и динамических характеристик карьерного оборудования
с целью повышения эффективности рабочего процесса : автореф. дис. … д‑ра техн. наук. М. : МГИ, 1972.
18. Владимиров В. М. Теория рабочего процесса роторных экскаваторов и основы оптимизации главных параметров их рабочего оборудования : автореф. дис. … д‑ра техн. наук. М. : МГИ,
1973.
19. Чудновский В. Ю. Механика, устойчивость и моделирование
рабочего процесса карьерных роторных экскаваторов : автореф. дис. … д‑ра техн. наук. Днепропетровск : ИГТМ АН УССР,
1984.
20. Чудновский В. Ю. Исследование природы динамических явлений в роторных экскаваторах // Проблемы машиностроения
и надежности машин. 2006. № 6.
21. Чудновский В. Ю. Исследование динамических свойств конструкции роторных экскаваторов // Горное оборудование
и электромеханика. 2006. № 1.
22. Основы теории колебаний. М. : Наука, 1978.
23. Пановко Я. Г. Основы прикладной теории упругих колебаний / В. В. Мигулин [и др.]. М. : Машиностроение, 1967.
24. Динамика и прочность многоковшовых экскаваторов и отвалообразователей / Волков Д. П., Черкасов В. А. М. : Машиностроение, 1969.
25. Грановский Г. И., Грановский В. Г. Резание металлов. М. : Высшая школа, 1985.
151
Список библиографических ссылок
26. Шестопалов К. К. Машины для земляных работ. М. : МАДИ, 2011.
27. Нетрадиционные методы ликвидации колебаний в рабочих
машинах / Я. Л. Либерман [и др.] // Материалы конференции
«Перспективные процессы и технологии в машиностроении».
Екатеринбург : Уральские выставки, 2008.
28. Либерман Я. Л., Меньшенина Н. А. К расчету безвибрационной скорости резания при токарной обработке // Инжиниринг, инновации, инвестиции : сб. науч. трудов. Челябинск :
ЧНЦ РАЕН, 2008.
29. Чупраков Ю. И. Гидропривод и средства гидроавтоматики. М. :
Машиностроение, 1979.
30. Бешелев С. Д., Гурвич Ф. Г. Математико-статистические методы экспертных оценок. М. : Статистика, 1974.
31. Баловнев В. И., Ермилов А. Б., Хмара Л. А. Рабочий орган роторного экскаватора : а. с. / Баловнев В. И., Ермилов А. Б., Хмара Л. А. (СССР). № 641035 ; заявл. 01.04.74 ; опубл. 05.01.79,
Бюл. 1.
32. Рабочее оборудование роторного экскаватора : а. с. / Баженов
[и др.] (СССР). № 485223 ; заявл. 23.07.73 ; опубл. 25.09.75,
Бюл. 35.
33. Гратхофф Хартмут. Рабочий орган роторного экскаватора :
а. с. / Гратхофф Хартмут (СССР). № 1386035 ; заявл. 26.11.84 ;
опубл. 30.03.88, Бюл. 12.
34. Федоров Д. И. Рабочие органы землеройных машин. М. : Машиностроение, 1989.
35. Рабочий орган роторного экскаватора : а. с. 340743 СССР: МКИ
Е 02f 3/24/Б. Н. Абрамов (СССР). № 1661523 ; заявл. 08.71 ;
опубл. 05.06.72, Бюл. № 18.
36. Ковш экскаватора с вибрирующими зубьями : а. с. / В. В. Карпов [и др.] (СССР). № 611975 ; заявл. 10.05.76 ; опубл. 25.06.78,
Бюл. 23 (45).
37. Польский С. Б., Левин Р. В., Круглов И. К. Гидравлический
привод вибрационных зубьев экскаваторного ковша : а. с. /
Польский С. Б., Левин Р. В., Круглов И. К. (СССР). № 1180462 ;
заявл. 01.04.81 ; опубл. 23.09.85, Бюл. 35.
38. Пановко Я. Г. Введение в теорию механического удара. М. : Наука, 1977.
152
Список библиографических ссылок
39. Либерман Я. Л., Летнев К. Ю. Ковш землеройной машины : пат.
194752 / Либерман Я. Л., Летнев К. Ю. (РФ). Опубл. 23.12.2019.
40. Галдин Н. С., Бедрина Е. А. Ковши активного действия на основе гидроударников для экскаваторов. Омск : Изд-во Сиб­
АДИ, 2003.
41. Краснов М. Л., Макаренко Г. И., Киселев А. И. Вариационное
исчисление. М. : Наука, 1973.
42. Либерман Я. Л., Лукашук О. А. Рабочий орган траншейного
экскаватора : пат. на полезную модель 2756339 C1 / Либерман Я. Л., Лукашук О. А., 29.09.2021.
43. Супрун П. П. Рабочее оборудование ротного экскаватора : а. с.
367771 СССР, кл. Е 02 Г 3/18 / Супрун П. П.
44. Манита Л. А. Условия оптимальности в конечномерных нелинейных задачах оптимизации : учеб. пособие / Московский государственный институт электроники и математики. М., 2010.
45. Гольдштейн М. Н. Механические свойства грунтов. М. : Стройиздат, 1979.
153
Учебное издание
Лукашук Ольга Анатольевна
Либерман Яков Львович
Роторные траншейные экскаваторы:
проектирование и расчет
Редактор И. В. Меркурьева
Верстка О. П. Игнатьевой
Подписано в печать 12.05.2022. Формат 70×100/16.
Бумага офсетная. Цифровая печать. Усл. печ. л. 12,4.
Уч.-изд. л. 9,0. Тираж 30 экз. Заказ 102.
Издательство Уральского университета
Редакционно-издательский отдел ИПЦ УрФУ
620049, Екатеринбург, ул. С. Ковалевской, 5
Тел.: +7 (343) 375-48-25, 375-46-85, 374-19-41
E-mail: rio@urfu.ru
Отпечатано в Издательско-полиграфическом центре УрФУ
620083, Екатеринбург, ул. Тургенева, 4
Тел.: +7 (343) 358-93-06, 350-58-20, 350-90-13
Факс: +7 (343) 358-93-06
http://print.urfu.ru
ISBN 579963548-5
9 785799 635480