Kusyumov, A. N., Romanova, E. V., Batrakov, A. S., Nurmukhametov, R. R., & Barakos, G. N. (2013). Simulation of the flow around a rotating circular cylinder taking into account laminar-turbulent transition
реклама
. Simulation of the flow around a rotating circular cylinder taking into account laminar-turbulent transition")
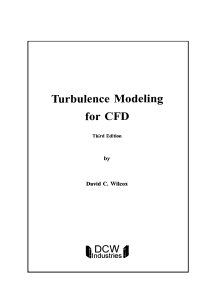
ISSN 1068-7998, Russian Aeronautics (Iz.VUZ), 2013, Vol. 56, No. 2, pp. 145–153. © Allerton Press, Inc., 2013. Original Russian Text© A.N. Kusyumov, E.V. Romanova, A.S. Batrakov, R.R. Nurmukhametov, G.N. Barakos, 2013, published in Izvestiya VUZ. Aviatsionnaya Tekhnika, 2013, No. 2, pp. 31–37. AERO- AND GAS-DYNAMICS OF FLIGHT VEHICLES AND THEIR ENGINES Simulation of the Flow Around a Rotating Circular Cylinder Taking into Account Laminar-Turbulent Transition a a a a b A. N. Kusyumov , E. V. Romanova , A. S. Batrakov , R. R. Nurmukhametov , and G. N. Barakos a Tupolev Kazan National Research Technical University, Kazan, Russia b The University of Liverpool, Liverpool, United Kingdom Received June 18, 2012 Abstract—We consider a problem of simulating a viscous incompressible fluid flow past a rotating cylinder in the region of critical Reynolds numbers as well as the simulation of separated bubbles in the boundary layer and the reverse Magnus effect. The Fluent 12 software is used for numerical simulation. The transition k-kl-ω model of turbulence makes it possible to consider the laminarturbulent flow regime transition. DOI: 10.3103/S1068799813020062 Keywords: flat circular cylinder, drag crisis, critical Reynolds number, laminar-turbulent transition, transverse force. We consider a problem of a nonstationary incompressible viscous fluid flow around a rotating flat circular cylinder in the region of the critical Reynolds numbers Recr0. The region of Recr0 is of significance for a stationary cylinder because the flow around the cylinder (as a bluff body) is associated with an abrupt drop of the cylinder drag (drag crisis). A drop of cylinder drag in the vicinity of Recr0 is determined by the flow regime change in the boundary layer near the cylinder surface. At the Reynolds numbers less than Recr0, the boundary layer on the stationary cylinder surface is completely laminar. The flow loses stability downstream, as a result of separation in the area of the rear critical point, and there is a rather extended area, where the flow is of a turbulent character. At the Reynolds numbers Re∞ = V∞ d/ν (V∞ is the incoming flow velocity; d is the cylinder diameter; ν is the kinematic viscosity coefficient), which exceed Recr0, the flow is of a mixed laminar-turbulent nature not only in the cylinder wake but also immediately near the cylinder surface [1, 2]. Another important effect is connected with cylinder mobility (rotation): the flow around the rotating cylinder leads to appearance of a transverse (lift) force. The appearance of the transverse force in the flow around the rotating cylinder is called the Magnus effect that is caused by asymmetry of the velocity field near the rotating cylinder surface: the moving cylinder surface carries away a part of the near-wall fluid volume. The near-wall rotating fluid layer interacts with the incoming flow. As a result, a part of the fluid flow near the rotating cylinder surface moves in the flow direction, while the other part moves in the opposing direction relative to the flow. Interaction with the main flow leads to a change in the velocity field, critical points A and B position (Fig. 1), and, consequently, to a change of the pressure field and the transverse force appearance. As a rule, when the Magnus effect is explained in the literature, it is considered [3] that in the area, where the cylinder surface moves in the downstream direction, the pressure is lower than in the area, where it moves in upstream direction. The transverse force appearing in this case and the Magnus effect will be considered to be “regular” (in Fig. 1, the regular transverse force is directed upwards; ϕ is the angular coordinate). 145 146 KUSYUMOV et al. The transverse force effect appears in the flow around the rotating elements of engineering structures. Examples of the Magnus effect application in engineering are available, for example, the efforts were B made to replace a sail by rotating cylinders (Flettner rotor ship [4]). A ϕ At the same time, in some experimental works [5, 6] it is noted that at definite rotational speeds the transverse force reverses its direction. In this case, it is considered that the reverse Magnus effect takes place. As is seen from the experimental works, the reverse Magnus effect Fig. 1. occurs near Recr0 and is connected with the laminar-turbulent transition. In this case, the reverse Magnus effect is usually explained in hypotheses and assumptions since the experimental works performed present, as a rule, only the data on measuring integral values of drag and transverse force coefficients. The reverse Magnus effect was also considered in [7] using means of the numerical simulation. In this case, the problem was solved with the use of the viscous-inviscid interaction in the framework of the boundary layer theory. In this paper, we investigate the peculiarities of using the Fluent 12 commercial software to calculate drag of the rotating cylinder at the Reynolds numbers close to Recr0. For simulation use is made of URANS, that is, the unsteady Reynolds-averaged Navier-Stokes equations [8] being closed by the corresponding turbulence models. In this software version there are the turbulence models which make it possible to simulate the laminar-turbulent transition. The objective of this paper is to apply the transient turbulence model in the vicinity of Recr0 for simulating the flow around the rotating cylinder, obtaining and explaining the reverse Magnus effect. CONSTRUCTION OF CALCULATION GRID AND CHOICE OF SIMULATION PARAMETERS The boundaries of the calculation domain are at a distance of ten cylinder diameters from the cylinder surface (the boundary is at a distance equal to 20 diameters in downstream direction). The number of the calculation grid nodes, problems of grid independence and a choice of a turbulence model were considered in [9] when calculating the flow around the stationary cylinder. In the given work, (as in [9]), use was made of a hexa-mesh, constructed in ICEM pre-processor, which contains about 68400 elements. To simulate turbulence, we used the transition k-kl-ω turbulence model. The calculation was carried out for different values of the Reynolds number, namely, Re ∞ = 136921; 273841 (low Reynolds number region, laminar regime for the stationary cylinder); 410762 (close-tocritical regime); 629835; 958445 (high Reynolds numbers, turbulent regime for the stationary cylinder). The calculations were performed at the initial degree of flow turbulence ε = 1%, as well as at ε = 0. 04 %; however, the data obtained varied insignificantly. In view of the flow regime nonstationarity in the area Recr0, the problem was solved in nonstationary statement. INTEGRAL CHARACTERISTICS FOR DIFFERENT REGIMES OF THE FLOW AROUND THE CYLINDER The combined values of the time-averaged transverse force coefficient for various values of the Reynolds number and the rotation parameter θ = ω R V∞ are presented in Fig. 2. The expression for the rotation parameter contains the following magnitudes: ω is the angular rotation frequency in radians; R is the cylinder radius. Aerodynamic coefficients were calculated for the nonstationary regime; therefore, Figs. 2 and 3 present the average magnitudes. The rotation direction and the incoming flow velocities correspond to Fig. 1. RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 SIMULATION OF THE FLOW AROUND A ROTATING CIRCULAR CYLINDER cy 1.5 Δcx cy (θ) Δc x (θ) 0.1 1 147 0 0.5 –0.1 0 –0.2 –0.5 –0.3 –1 0 0.2 0.4 —Re = 136921; 0.2 —Re = 410762; —asymptote —Re = 273841; —Re = 958445; —Re = 629835; –0.4 θ,deg 0 0.8 0.6 —Re = 273841; 0.4 —Re = 629835; Fig. 2. 0.6 —Re = 410762; θ, deg —Re = 958445 Fig. 3. Figure 3 shows also the dependence of the drag coefficient increment Δcx ( θ ) = cx ( θ ) − cx ( 0 ) . Here cx ( θ ) is the magnitude of the drag coefficient for the given rotation parameter value θ; cx ( 0 ) is the drag coefficient of the stationary cylinder (at θ = 0). The stationary cylinder drag was calculated using the same turbulence model. For comparison Fig. 4 presents experimental values [1] of the transverse force coefficient cy for ε = 0. 04 %. Figure 5 shows also the experimental values of the cylinder drag coefficient increment Δc x (in comparison with the stationary cylinder). Re × 10 −5 = 1.1 1.6 A2 0.5 0.1 A1 4.3 4.8 0.2 4.03 A3 1.0 Re × 10 −5 = 5.3 1.0 0.5 0 2.1 0 θ 1.0 3.2 6.4 –0.5 –0.2 3.4 3.97 5.3 –1.0 3.2 2.7 –0.4 4.3 0 Fig. 4. 2.1 0.2 1.6 0.4 θ,deg Fig. 5. It follows from the data presented that the values calculated differ from the data of [1]. It can be explained by the influence of various factors mentioned, particularly, in [1], namely, experiment conditions, precision in producing the cylinder surface, its roughness degree, surface features of the wind tunnel design, influence of the end effects, and etc. As the experimental conditions may differ, the results of various authors diverge considerably. At the same time, the qualitative agreement of the calculation results with the experimental data should be pointed out. The calculated values of the integral aerodynamic coefficients correspond to the experimental ones in sign and order of magnitudes. The numerical simulation showed that the reverse RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 148 KUSYUMOV et al. Magnus effect exists in the same range of Reynolds numbers in the vicinity of Recr0 as for experimental investigations. At sufficiently large values of the rotation parameter ( θ > 0.5) , the transverse force coefficient values are close to the values of asymptote given according to [1]. ANALYSIS OF THE FLOW DISTRIBUTED CHARACTERISTICS To clarify the reasons of the reverse Magnus effect appearance, we will consider in more details the distributed flow characteristics near the cylinder surface. For the stationary cylinder a segment connected the critical points A ( ϕ = 0°) and B ( ϕ = 180°) , divides the flow into two symmetrical areas (upper and lower). The surface mobility breaks the flow symmetry; nevertheless, we will consider that the surface point belongs to the “upper” surface of the rotating cylinder, if it is above the segment connecting the points ϕ = 0° and ϕ = 180° (the rotation direction in this case corresponds to the external flow direction (Fig. 1)). Otherwise, we will consider that the surface point is on the “lower” cylinder surface. In view of the velocity field asymmetry Re cr .up and Re cr .l (for the upper and lower surfaces, respectively) will be different. The difference in the magnitudes Re cr .up and Re cr .l is one of the reasons of the reverse Magnus effect. As pointed out in [1], the velocity field asymmetry leads to a delay of the flow regime change to higher values of the Reynolds number Re cr .up > Re cr 0 in the region, where the flow direction coincides with the rotation direction; in the region, where the flow direction is opposite to the rotation direction, the flow regime can change earlier (at lower Reynolds number values Re cr .l < Re cr 0 ) Let us present the distribution of the pressure coefficient, the tangential stress and the turbulence intensity on the upper and lower cylinder surfaces for Re ∞ = 273841 (Fig. 6) and Re ∞ = 958445 (Fig. 7) depending on the rotation parameter θ = 0; 0.2; 0.4; 0.6. As the flow is nonstationary, the average magnitude values are given. The pressure coefficient distribution c p = 2 ( p − p∞ ) ρV∞2 (p, p∞ is the pressure at the point being considered and in the incoming flow; ρ is the fluid density) on the upper and lower cylinder surface is presented in Figs. 6a and 6b and Figs. 7a and 7b, respectively. The position of a surface pressure coefficient maximum point, as it follows from the graphs at the rotation parameter values considered, practically does not depend on the cylinder rotation frequency and it has the same coordinate as for the stationary cylinder ( ϕ = 0°) . The analysis of the vector field structure shows that as the rotation parameter θ grows, some deformation of the flow field takes place according to Fig. 1. However, in the rotation parameter θ range considered a change of the critical point position, and, consequently, the shift of the point cp max position shows up insignificantly. The distribution of the dimensionless tangential stress τ w is presented in Figs. 6c and 6d, Figs. 7c and 7d. Here τ w = τ w ρV∞2 Re ∞ 2, where τ w is the tangential stress on the wall. In distinction from the pressure coefficient distribution, the position of the minimal value point τ w depends significantly from the cylinder rotation frequency. With the rotation direction pointed out (Fig. 1) the position of the point for the tangential stress minimal is displaced to the upper surface. Such a pattern of the tangential stress distribution agrees with the results given in [10]. The stationary laminar boundary layer on the rotating cylinder surface was considered in [10]) and an expression for the tangential stress was obtained in the vicinity of the critical point. In the coordinate system, assumed in the Fluent software, the expression for the dimensionless tangential stress (according to [10]) will have the following form τw = f1′′ ( 0 ) 2ϕ ∓ 8 f1′′( 0 ) θ , RUSSIAN AERONAUTICS (1) Vol. 56 No. 2 2013 149 SIMULATION OF THE FLOW AROUND A ROTATING CIRCULAR CYLINDER where the value ϕ is taken in radians; f1′′( 0 ) is the second derivative of the function determining the Blasius solution [11] for the stationary cylinder in the laminar boundary layer. The sign + or – is determined by the ratio between the direction of the cylinder surface bypassing and the rotation direction (the sign + corresponds to the upper surface). When substituting the numerical value f1′′( 0 ) = 6.973 , the expression for τ w (1) takes the following form: τ w = 3.4865ϕ ∓ 1.147θ . c p = J ( ϕ ) , upper surface cp 1 0 –1 0 –2 –3 20 40 θ = 0.6 θ = 0.4 θ = 0.2 ϕ,deg θ=0 60 80 100 120 140 160 c p = J ( ϕ ) , lower surface cp 1 0 –1 0 –2 –3 θ=0 60 20 (a) τw = f ( ϕ ) , upper surface τw (2) τw 40 θ = 0.2 θ = 0.4 ϕ,deg θ = 0.6 80 100 120 140 160 (b) τw = f ( ϕ ) , lower surface 2.5 1.5 θ = 0.6 θ = 0.4 1.0 θ = 0.2 θ=0 0.5 2.0 θ = 0.6 1.5 θ = 0.4 1.0 θ = 0 θ = 0.2 0.5 0 40 80 160 ϕ,deg 120 (c) ε = f ( ϕ ) , upper surface ε, % θ=0 θ = 0.2 θ = 0.4 0.004 40 80 (e) 120 40 80 160 ϕ,deg 160 ϕ,deg θ = 0.6 θ = 0.4 θ = 0.2 θ=0 0.01 0.008 0.006 0.004 0.002 θ = 0.6 120 (d) ε = f ( ϕ ) , lower surface ε, % 0.002 0 0 0 40 80 (f) 120 160 ϕ,deg Fig. 6. At ϕ < 20 ° and Re ∞ = 273841 , the tangential stress values, calculated by Eq. (2), agree rather well with the data presented in Figs. 6c and 6d. The difference in values for τ w , predicted by the formula from [10] and obtained as a result of the numerical simulation, can be explained by the approximate character of the solution in [10] (the boundary layer was considered to be totally laminar), and also by a nonstationary character of the real flow (which was not taken into consideration in [10]). Figures 6e and 6f and Figs. 7e and 7f present the distribution of the surface degree of the turbulence intensity. To analyze in more detail the relationships between the turbulence intensity distribution and the separation areas position, we will consider the flow characteristics at the Reynolds number RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 150 KUSYUMOV et al. Re ∞ = 273841. It follows from Figs. 6c and 6d that the surface mobility leads to the shift of the points, where the surface turbulence intensity ε appears. For the lower surface (the surface moves upstream) the surface point of the laminar-turbulent transition shifts to the front critical point with a significant growth of maximum ε. For the upper surface (the surface moves downstream) the laminar-turbulent transition point shifts to the back critical point, but the growth of the surface values ε is not so significant. c p = f ( ϕ ) , upper surface cp 1 0 –1 0 –2 –3 –4 θ = 0 θ = 0.2 20 40 60 θ = 0.4 θ = 0.6 1 0 –1 0 –2 –3 ϕ,deg 80 100 120 140 160 (a) τw = f ( ϕ ) , upper surface τw c p = f ( ϕ ) , lower surface cp 20 40 60 80 ϕ,deg 100 120 140 160 (b) τw = f ( ϕ ) , lower surface τw 7.0 2.5 θ = 0.6 2.0 θ = 0.4 1.0 0.5 θ = 0.6 6.0 5.0 1.5 θ = 0.2 4.0 θ=0 3.0 θ = 0.4 θ = 0.2 θ=0 2.0 1.0 0 ε, % 20 40 60 80 100 120 140 160 ϕ,deg (c) ε = f ( ϕ ) , upper surface 0 ε, % θ = 0.6 θ = 0.4 θ = 0.2 θ=0 0.01 0.008 0.006 0.004 0.002 0 θ = 0.2 θ = 0 θ = 0.6 θ = 0.4 0.02 0.015 20 40 60 80 100 120 140 160 ϕ,deg (d) ε = f ( ϕ ) , lower surface θ = 0.6 θ = 0.4 θ = 0.2 θ=0 0.01 0.005 20 40 60 80 100 120 140 160 ϕ,deg (e) 0 20 40 60 80 100 120 140 160 ϕ,deg (f) Fig. 7. It also follows from Figs. 6c and 6d that the surface mobility and the distribution ε(ϕ) change lead to the separation area shift to the back critical point both for the upper and lower surfaces. In this case, an increased growth of the turbulence degree intensity in the near-wall area of the flow and the shift of the laminar–turbulent transition point to the front critical point results in a more intensive displacement of the separation area for the cylinder lower surface. A change in the separation area position causes the pressure redistribution and additional rarefaction in the cylinder lower part (Figs. 6a and 6b). At comparatively small values of θ ( θ ≤ 0.3) the pressure distribution on the lower surface changes to a greater RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 SIMULATION OF THE FLOW AROUND A ROTATING CIRCULAR CYLINDER 151 degree than on the upper one, namely, cp min on the upper surface remains practically constant, as opposed to the lower one. As a result, at the given flow parameters there occurs the reverse Magnus effect. A growth of the rotation parameter θ is accompanied by a more intensive change of the separation area position. However, for large values of the rotation variable θ (at θ > 0.5), the difference in the separation points position on the upper and lower cylinder surfaces become less significant. This leads to equalization of the pressure distribution and termination of the reverse Magnus effect. At even higher values of θ, first, the equalization of the pressure distribution takes place and then the transverse force vector takes a “normal” position (the values cy become positive). The similar flow pattern with the reverse Magnus effect is observed for the moderate ( Re ∞ = 410762 ) and high ( Re ∞ = 629835) Reynolds numbers. However, for even higher Reynolds number ( Re ∞ = 958445) (Fig. 6) in the given range of the parameter θ change, the reverse Magnus effect does not exist. ANALYSIS OF THE BOUNDARY LAYER STRUCTURE A real picture of the flow regime change has a rather complicated structure. In the immediate proximity to the cylinder surface there may appear local separated zones (separated bubbles); the flow structure behind them depends on the Reynolds number and the rotation parameter θ. At comparatively small values of θ for the Reynolds numbers Re ∞ < Re cr 0 , the separation is of a laminar character. The separated shear layer (“shear layer” [5, 6]) is carried away by the flow followed by flow regime change at some distance from the surface. At the same time, the flow regime change in the separated zone leads to a change of the flow turbulence surface intensity. On the whole, as Re ∞ increases, the laminar-turbulent transition area and the separated shear layer approach the cylinder surface (the separated shear layer can add to the cylinder surface and then is separated again). The secondary separation is of a turbulent character. Between the points of the primary (laminar) and secondary (turbulent) separation there occurs a developed “separated bubble” [5, 6]. Note that in [7] a simpler structure of the boundary layers was used. The simulation was based on the viscousinviscid interaction theory and was limited to considering the “continuous” laminar or turbulent boundary layers without determination of the separated bubbles localization and calculation of the boundary layers of the mixed laminar-turbulent type. We will consider the separated bubbles available on the rotating cylinder surface for the Reynolds number Re ∞ = 958445. The stationary cylinder at the given Reynolds number is characterized by the developed boundary layers of the mixed laminar and turbulent type [9]. Immediately behind the laminar boundary layer there is an area of the primary slight separation being characterized by small values of the tangential stress which is transferred into the area of a more developed separated flow. Behind this area attachment of the separated shear layer takes place; farther there is an area of the turbulent boundary layer, which is finally separated from the cylinder surface. For the rotating cylinder the flow pattern has a more complicated structure and depends on the magnitude of the rotation parameter θ. To determine in details the flow structure near the cylinder surface, we will introduce, as in [9], the following set of angular points: ϕ SB is the beginning of the primary separation; ϕT is the surface point of transition; ϕ SE is the end of the primary separation; ϕ A is the attachment of the separated shear layer (the beginning of the turbulent boundary layer); ϕT S is the separation of the turbulent boundary layer. The angular coordinates were determined using the local extremum points of the tangential stress on the cylinder surface and the vector field distribution. The coordinates of points, characterizing the flow structure for some moment of time (corresponding to average values of the aerodynamic coefficients), are given in table. RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 152 KUSYUMOV et al. Table θ 0 0.05 0.1 0.15 0.2 0.25 0.3 0.4 0.5 0.6 ϕSB u ϕSB l ,deg ϕT u ϕT l ,deg ϕSE u ϕSE l ,deg ϕ A u ϕ A l ,deg ϕTS u ϕTS l ,deg 99 /99 100 /99 100 /100 101 /100 101 /102 /103 /103 /103 /103 /- 103 /103 104 /102 105 /101 107 /101 109 /96 110 /96 111 /93 112 /89 114 /84 115 /81 104 /104 106 /103 107 /101 109 /101 - 110/ 110 111 /107 114 /105 117 /105 - 121 /121 121 /121 119 /122 119 /122 -/122 -/121 -/119 -/117 -/117 -/115 It follows from the table that a significant flow transition, connected with the cylinder surface rotation, begins after θ > 0.15 : the area of the primary slight separation and the area of the turbulent boundary layer downstream of the separated bubble are destroyed. In this case, in the range from θ = 0.2 up to the value θ = 0.5 the upper cylinder surface is characterized by the laminar boundary layer separation (it follows from the tangential stress distribution in Fig. 6c and 6d) and behind the separation point the separated zone extends over the whole upper cylinder surface—the transition surface point is in the separated zone. The lower surface is characterized by another flow structure: at θ = 0.2 − 0.5, the area of the primary slight separation disappears (the area ϕ SB – ϕT – ϕ SE concentrates at a point), there occurs a laminar-turbulent transition and the separation takes place only in the area of the developed turbulent flow. At higher values θ ( θ > 0.6 ) the cylinder surface motion velocity can be compared to the main flow velocity. This leads to a significant transformation of the boundary layer structure and the velocity vector fields near the flow surface (in particular, the flow velocity gradient decreases significantly in the radial direction). In general, analyzing the results of simulating the flow around the rotating cylinder, we see that the reverse Magnus effect occurs in the Reynolds number area, where the flow transition takes place. It follows from the comparison of the distributed surface parameters of the flow near the rotating cylinder that the appearance of the turbulence surface intensity (laminar-turbulent transition) is accompanied by the change of the pressure and tangential stress distribution. the pressure distribution varies more significantly on that part of the surface which moves upstream. The tangential stress in the vicinity of the surface point of laminar-turbulent transition, as a rule, has a local extremum (minimum). In the range of the Reynolds numbers close to Recr for the stationary cylinder, a significant pressure distribution transformation leads to the reverse Magnus effect. When the Reynolds number increases, the surface pressure distribution transformation is not so significant (for the fixed rotation parameter value) and there is no reverse Magnus effect. The k-kl-ω transition turbulence model in ANSYS Fluent 12.0 software makes it possible to obtain the calculation data that agree better with the experimental data in comparison with the models which do not take into account the laminar-turbulent transition [12]. This turbulence model makes it possible to predict the effects quite complicated for simulation and, in particular, demonstrates the reverse Magnus effect available in the vicinity of Recr. At the same time, the quantitative results of simulation differ somewhat from the experimental data in the literature. This fact represents the necessity of further investigations of the phenomenon of laminar-turbulent transition and improvement of both as the mathematical model and the numerical simulation process as a whole and experimental investigations, in particular. REFERENCES 1. Bychkov, N.M. and Kovalenko, V.M., Aerodynamic Forces on a Rotating Smooth Cylinder in a Transverse Flow, Izv. SO AN SSSR, Series: Technical Sciences, 1980, AG 8, no. 2, pp. 125–135. RUSSIAN AERONAUTICS Vol. 56 No. 2 2013 SIMULATION OF THE FLOW AROUND A ROTATING CIRCULAR CYLINDER 153 2. Tani, Itiro, Low-Speed Flows Involving Bubble Separations, Progress in Aeronautical Science, 1964, vol. 5, pp. 70–103. 3. Mkhitaryan, A.M., Aerodinamika (Aerodynamics), Moscow: Mashinostroenie, 1976. 4. Anderson, J. D., Fundamentals of Aerodynamics, 4th Int. Edition, Mc.Graw-Hill, 2007, pp. 246–262. 5. Fletcher, C. A. J., Negative Magnus Forces in the Critical Reynolds Number Regime, J. Aircraft, 1972, vol. 9, no. 12, pp. 826–834. 6. Roshko, A., Experiments on the Flow Past a Circular Cylinder at Very High Reynolds Number, California Institute of Technology, 1960, pp. 345–356. 7. Belotserkovskii, S.M., Kotovskii, V.N., Nisht, M.I., and Fedorov, R.M., Computer Modeling of the Stalled Flow of a Rotating Cylinder and the Reverse Magnus Effect, Inzhenerno-Fizicheskii Zhurnal, 1985, vol. 48, no. 2, pp. 244---250 [Journal of Engineering Physics (Engl. Transl.), vol. 48, no.2, pp. 175---180]. 8. Jiyuan Tu, Guan Heng Yeoh, Chaoqun Liu. Computational Fluid Dynamics: A Practical Approach, Amsterdam; Boston : Butterworth-Heinemann, 2008.. 9. Batrakov, A.S., Kusyumov, A.N., Nurmukhametov, R.R., Romanov, E.V., and Barakos, G.N., Simulation of the Flow Around a Stationary Circular Cylinder Taking into Account Laminar-Turbulent Transition, Izv.Vuz. Av. Tekhnika, 2012, vol. 55, no. 3, pp. 31---35 [Russian Aeronautics (Engl. Transl.), vol. 56, no. 3, pp. 31---35]. 10. Kusyumov, A,N., Analysis of Transverse Flow Around a Rotating Cylinder in the Vicinity of a Critical Point, Teoreticheskie Osnovy Khimicheskoi Tekhnologii, 2003, vol. 37, no. 3, pp. 1---5. 11. Schlichting, H., Boundary-Layer Theory, N.Y.: McGraw Hill, 1979. 12. Kusyumov, A.N. and Romanova, E.V., Simulation of the Flow Past a Flat Cylinder for Reynolds Numbers Near Critical, Trudy 14-ogo Vserossiiskogo seminara po upravleniyu dvizheniem i navigatsii letatel’nykh apparatov (Proc. 14th Seminar on Aircraft Motion Control and Navigation), Samara: Samara State Aerospace University, 2011, pp. 30–31. RUSSIAN AERONAUTICS Vol. 56 No. 2 2013