")
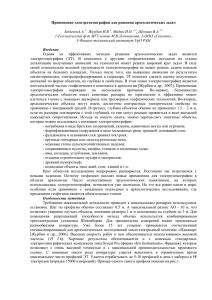
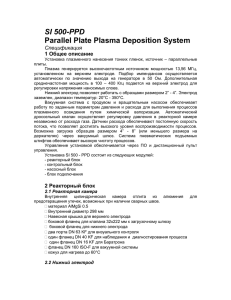
Глубинная электротомография вызванной поляризации для решения рудных задач. Куликов1,2 В.А., Модин2 И.Н., Яковлев1,2 А.Г. 1-ООО «Северо-Запад», 2-Геологический факультет МГУ им. М.В.Ломоносова, НПЦ «Геоскан» На одном из рудных участков на Кавказе выполнены измерения с помощью глубинной электротомографической установки[1]. Уже при постановке задачи возник главный вопрос, можно ли реально провести исследования с помощью электротомографических зондирований ВП на глубину 200-250 м? Стандартные аппаратурные электротомографические комплексы не предусматривают возможностей для выполнения таких работ прежде всего по причине большой громоздкости оборудования, огромных физических затрат на устройство качественных заземлений и сильных индукционных помех. В самом деле, для обеспечения глубинности 250 м требуется разнос АО свыше 1000 м, а линия «бесконечности» должна устанавливаться на расстояние 3-5 км. При этом электроды в косе должны быть так хорошо заземлены, чтобы полезные сигналы на наиболее удаленных разносах составляли не менее 200-500 мкВ, что практически нереализуемо. Поэтому для решения задачи нам пришлось изменить схему электрического зондирования и воспользоваться обычными косами и оборудованием, которые применяются в методе срединного градиента. Работы выполнялись по схеме, показанной на рис.1. Электротомография (ЭТ) - это раздел электроразведки методом сопротивления и ВП[2], относящийся к технологии электрических зондирований и включающий в себя методику полевых наблюдений, алгоритмы обработки и интерпретации полевых данных, направленные на получение моделей среды, имеющих двумерное строение. Ее особенностью является многократное использование в качестве питающих и измерительных одних и тех же электродов, установленных на профиле наблюдений. Это приводит к уменьшению общего числа рабочих положений электродов при существенном увеличении плотности измерений по сравнению с обычным методом вертикальных электрических зондирований. Такой подход позволяет, с одной стороны, работать с современной высокопроизводительной аппаратурой, используя электроразведочные косы, а, с другой стороны, применять эффективные алгоритмы моделирования электрического поля и инверсии. В ряде случаев питающие электроды и линии АВ имеют автономное подключение. Это дает возможность разделить и рассоединить питающие и приемные линии. А это позволяет использовать переменный ток и в качестве рабочей частоты первых Гц. Интерпретацию данных электротомографии проводят в рамках двумерных моделей[3]. Полевая методика электротомографии имеет следующие особенности (до 2003 г. технология ЭТ носила название «Сплошные электрические зондирования»[1]): 1. все электроды расставляются на одинаковом расстоянии а друг от друга; 2. разносы нарастают в арифметической прогрессии, при этом минимальный разнос составляет 1.5а, максимальный разнос определяется глубинностью или длиной профиля; 3. шаг по профилю а равен шагу по разносам а, при небольших размерах установки размер MN равен а, при значительных размерах установки и разносов АО или ОВ, превышающих (15÷20)а размер MN может быть Рис. 1. Схема глубинной электротомографии. увеличен до 3а, 5а, 7а или даже 9а. Программное обеспечение электротомографии сильно отличается от обычных, классических ВЭЗ технологией выбраковки и обработки сигналов, их представления и интерпретации, направленной на получение двумерного геоэлектрического разреза[4]. При этом в основе алгоритма инверсии полевых данных лежит произвольная двумерная модель, которая автоматически подбирается в процессе интерпретации. В электротомографии используются либо специализированные приборы (например, такие как Syscal Pro – французская фирма-производитель «IRIS Instruments») либо обычные приборы. В первом случае с очень высокой производительностью удается получить качественные данные. Во втором случае удается реализовать любые методики и установки, которые в данный момент требуются для гибкой реализации поставленной геологической задачи. Как раз именно такой случай имел место в нашей работе. При этом сразу одновременно решалось множество проблем: 1.производилось сильное подавление индукционной помехи путем размещения питающего диполя сзади приемных кос, 2.отпала необходимость в электротомографических косах очень большой длины, 3. в качестве питающих заземлений использовались специальные мощные системы токовых электродов, которые позволяли развивать токи порядка 1.5 – 2 А. Для производства измерений использовалось три косы, каждая из которых имела длину 400 м. Общая длина всех измерительных линий составляла 1200 м. Так как в одной косе было 8 каналов, общее число разносов составляет 24. Под разносом здесь классически понимается расстояние от питающего электрода до центра приемного диполя. Питающий электрод В устанавливался перед началом головной косы в 50 м от первого электрода. Второй электрод для уменьшения его влияния и увеличения сигнала отодвигался на 1400 м назад вдоль линии профиля. В целом установка по своей конфигурации занимает промежуточное положение между дипольной осевой и трехэлектродной установкой. Таким образом, первое зондирование производилось для всей расстановки кос. В дальнейшем на второй стадии процесса измерения питающий электрод наступал на косу на один шаг. При этом первый электрод, стоящий в измерительной косе, использовался как токовый электрод. Автоматически один измерительный канал выбывал из общей схемы измерительных кос. Когда питающий электрод проходил на восьмом шаге всю первую измерительную косу, она полностью переставлялась на новое положение в голову всей установки. В этот момент общее положение измерительных каналов опять достигало 24. Затем весь цикл измерений повторялся. Точки записи, соответствующие такой схеме измерения, показаны на рис.4. При работе на участке профиля длиной 1600 метров общее количество точек наблюдения составило 752. Необходимо отметить, что для увеличения глубины исследования приблизительно третья часть всех измерений выполнялась вне участка профиля, на котором проводились работы. Литература 1. Бобачев А. А., Горбунов А.А., Модин И.Н., Шевнин В.А.. Электротомография методом сопротивлений и вызванной поляризации. Приборы и системы разведочной геофизики. 2006, N02. 2. Комаров В.А. Электроразведка методом вызванной поляризации, «Недра», 1980г. 3. Электроразведка. Справочник геофизика в двух книгах. - М.: Недра, 1989г. 4. Loke, M. H., and Barker, R. D., 1996, Practical techniques for 3D resistivity surveys and data inversion: Geophys. Prosp., 44, 499–523.