МИНОБРНАУКИРОССИИ
Федеральное государственное бюджетное образовательное
учреждение высшего образования
«Казанский национальный исследовательский технологический
университет» (ФГБОУ ВО«КНИТУ»)
Институт управления, автоматизации и информационных технологий
Факультет управления и автоматизации
Кафедра системотехники
ОТЧЕТ
по учебной практике
кафедра системотехники
на тему: Установка Scilab. Назначение окон. Основные команды меню.
Решение единственного дифференциального уравнения. gPROMS
ModelBuilder. COM (Component Object Model). Advanced Process Control APС
Выполнил студент__________________________________________Бакиев Р.М.
Руководитель практики
от предприятия,
______________________________________________ЛаптеваТ.В.
организации,
учреждения
Руководительпрактики
от
кафедры
______________________________________________ЛаптеваТ.В.
Казань, 2021
1
Оглавление
Введение ....................................................................................................................... 4
1.Установка Scilab ....................................................................................................... 5
2.Назначение окон ....................................................................................................... 7
2.1.Обозреватель переменных.................................................................................... 9
2.2.Журнал команд .................................................................................................... 11
3.Основные команды меню ...................................................................................... 12
4.Решение дифференциальных уравнений ............................................................. 13
4.1.Дифференциальные уравнения n-го порядка ................................................... 13
4.2.Пример решения оду в Scilab ............................................................................. 13
4.3.Системы дифференциальных уравнений.......................................................... 17
4.4.Примеры поиска решения систем ОДУ в Scilab .............................................. 17
4.5.Решение системы ОДУ в матричной форме..................................................... 19
4.6.Решение ДУ 2-го порядка путём сведения к системе уравнений .................. 21
5. gPROMS ModelBuilder .......................................................................................... 24
5.1.Особенности и преимущества............................................................................ 26
6.COM (Component Object Model) ........................................................................... 28
6.1.Интерфейсы ......................................................................................................... 31
6.2.Классы .................................................................................................................. 31
6.3.Язык определения интерфейса и библиотеки типов ....................................... 31
6.4.Каркас объекта..................................................................................................... 32
6.5.Подсчет ссылок ................................................................................................... 34
6.6.Программирование.............................................................................................. 35
6.8.COM без регистрации ......................................................................................... 36
6.9.Создание экземпляров COM –объектов вручную ........................................... 36
6.10.Прозрачность процессов и сети ....................................................................... 37
6.11.Резьба .................................................................................................................. 37
7.Advanced Process Control APC .............................................................................. 38
7.1.Цели APC ............................................................................................................. 38
7.2.Model Predictive Control ...................................................................................... 38
2
7.3.Интегрирование APC .......................................................................................... 39
7.4.Внедрение APC.................................................................................................... 40
7.5.Возможности и функции APC-системы............................................................ 40
Вывод .......................................................................................................................... 42
Список литературы ................................................................................................... 43
Рецензии: .................................................................................................................... 44
3
Введение
Данный реферат представляет собой краткий обзор целей создания и
основных особенностей пакета Scilab
В настоящем документе рассматриваются основные возможности пакета
Scilab и навыки, необходимые для того, чтобы приступить к работе как можно
быстрее. Показано, как получить дистрибутив и установить Scilab на
персональный компьютер, а также где искать помощи в случае затруднений.
Основные конструкции встроенного языка программирования Scilab. Работа
основными функциями библиотеки линейной алгебры. Представлены основные
конструкции структурного программирования в Scilab.
Так же рассмотрим такие программы как gPROMS ModelBuilder, COM
(Component Object Model), Advanced Process Control APC.
gPROMS - это система моделирования, ориентированная на уравнения,
используемая для построения, проверки и выполнения моделей из первых
принципов в рамках схемы технологических карт.
COM — это механизм, позволяющий повторно использовать объекты
(точнее, компоненты), независимо от языков, используемых программистом,
реализовавшим компонент, и программистом, который его использует, и
независимо от того, был ли компонент реализован в программе клиента или в
другом месте на машине (или в сети).
Advanced Process Control (APC) - программно-аппаратный комплекс,
интегрированный в действующую на технологическом объекте распределенную
систему управления.
4
1.Установка Scilab
Свободно
распространяемую
версию
пакета
вместе
с
полной
документацией на английском языке можно получить на сайте программы
www.scilab.org.
Существую версии Scilab для операционных систем Windows и Linux. Они
имеют некоторые отличия в названиях пунктов главного меню, но команды
пакета в обеих версиях идентичны.
Рассмотрим особенности установки пакета для операционной системй
Windows.
Для того чтобы установить четвертую версию пакета на ПК необходимо
обратиться к выполняемому файлу scilab-6.1.1, после чего начнет свою работу
Мастера установки. В первом окне Мастера установки нужно выбрать язык
(английский или французский) и нажать кнопку OK для продолжения
инсталляции. Следующее окно является информационным. Пользователь
получает сообщение о том, что на его компьютер будет установлена четвертая
версия пакета Scilab и рекомендацию закрыть другие приложения перед
установкой. Для переходя к третьему окну Мастера установки следует выбрать
кнопку Next. В этом окне следует принять условия лицензионного соглашения (I
accept the agreement) и нажать клавишу Next для продолжения. На следующем
этапе пользователю будет предложено выбрать путь для установки пакета. По
умолчанию это папка C:\Program Files\scilab-6.1.1-rc1. Другой путь можно
установить при помощи кнопки Browse…. Кроме того, в этом окне выводится
информация о количестве места на выбранном диске, требуемого для установки
стандартного набора компонентов системы. Нажатие кнопки Next приведет к
следующему шагу (рис. 1.1), где пользователю будет предложено выбрать один
из типов инсталляции:
•инсталляция по умолчанию (Installation Default);
•полная инсталляция (Full installation);
•компактная инсталляции (Compact installation);
5
•инсталляция с выбором компонентов необходимых для установки
(Custom installation).
Далее будет приведен список компонентов соответствующих выбранному
типу
установки.
Переход
к
следующему
окну
Мастера
установки
осуществляется с помощью кнопки Next.
Рис. 1 - Окно выбора компонентов для установки Scilab
Следующее окно мастера установки сообщает пользователю о том, что
после инсталляции в меню Пуск будет создан ярлык, предназначенный для
запуска Scilab. По умолчанию ему будет присвоено имя scilab-6.1.1. Изменить
параметры ярлыка в меню Пуск можно при помощи кнопки Browse…. Нажатие
кнопки Next приведет к появлению следующего окна, в котором Мастер
установки предложит список дополнительных задач, доступных после
инсталляции. Для переходя к следующему шагу так же необходимо выбрать
Next.
6
Перед началом установки Мастер выдает краткий отчет о параметрах
инсталляции. Выбор кнопки Install приведет к началу процесса инсталляции.
Процесс установки Scilab заключается в копировании файлов системы на
жесткий диск. Контролировать процесс инсталляции пользователь может с
помощью, так называемого, линейного индикатора. Завершается процесс
установки появлением информационного окна. Нажатие кнопки Next приведет к
последнему шагу, где у пользователя будет возможность установить
единственную опцию Launch scilab. Если этот параметр активен, то Scilab
запустится сразу после нажатия кнопки Finish, иначе запуск можно произвести
из главного меню (Пуск\Программы\scilab-6.1.1) или с помощью ярлыка на
рабочем столе: Перейдем к рассмотрению установки пакета для операционной
системы Linux. Scilab входит в состав таких дистрибутивов, как ALT Linux и
Mandrivia 2007. Для установки в другие дистибутивы Linux необходимо
загрузить текущую версию Scilab с сайта http://www.scilab.org. Развернуть файл
в какую-либо папку (например, /usr/lib), и войдя в папку Scilab под root
выполнить команду make. После этого командой /usr/lib/Scilab 4/ bin/scilab
можно запускать программу на выполнение.
2.Назначение окон
Командное окно — самое главное окно, посредством которого происходит
общение со средой. В данное окно пользователь вводит команды и получает
результаты.
На рисунке 1 в командном окне можно наблюдать техническую
информацию о загрузке окружения, после которой система приглашает
пользователя ввести команду. Начало строчки сопровождается стрелкой,
указывающей направо (-->), которая и называется приглашением (англ. prompt
или command prompt).
7
Рис. 2 - Пользовательский интерфейс в Windows
Попробуйте ввести следующий код
-->2*2+69/25
В ответ от интерпретатора вы получите следующее
-->2*2+69/25
ans =
6.76
Другими словами, вы передали среде алгебраическое выражение, которое
было ей рассчитано, а результат помещён в автоматически создаваемую
переменную ans, с которой мы познакомимся позднее. Введя эту команду, вы
внесли переполох в оставшихся окнах.
Перед тем как мы перейдём на следующее окно, введите вторую команду.
--> myVariable=26;
Этой командой вы попросили среду выделить память под новую
переменную с именем myVariable и присвоить ей значение 26. Обратите
внимание на точку с запятой в конце команды. Введя этот символ, вы попросили
интерпретатор не выводить информацию о результате, получаемом после
команды, к которой приставляется точка с запятой.
8
Например, попробуйте ввести
--> anotherVariable=31
и вы получите ответ, что присваивание прошло
--> anotherVariable=31
anotherVariable=
31.
Блокирование вывода результата бывает полезным в случаях, когда
результат оказывается очень большим, тривиальным или неудобным для
изучения.
2.1.Обозреватель переменных
Рис. 2.1 - Окно обозревателя переменных
Это окно появилось относительно недавно и призвано облегчить работу с
объектами, которые создал пользователь. Если вы попробовали ввести
предыдущие команды, то можете наблюдать результат, показанный на рисунке
2.
В этом окне отображается вся необходимая информация о созданных
переменных в частности:
имя переменной;
9
размер переменной;
тип переменной или другими словами тип данных, которая эта
переменная в настоящий момент хранит;
видимость переменной.
Нажав по переменной дважды откроется окно редактора переменных,
которое показано на рисунке 3.
Рис. 3 - Окно редактора переменных
Редактор переменных — это ещё одно новшество.Вероятно вы спросите,
почему в редакторе переменная представлена таблицей, на что вам будет дан
вполне внятный ответ:
Все объекты в среде Scilab являются двухмерными массивами, в лучших
традициях MATLAB, частичной копией которого является Scilab.
Переменные, которые были нами созданы ранее, являются простонапросто вырожденным случаем — массивом с одним элементом. Мы ещё не раз
вернемся к этому вопросу, а пока внимательно рассмотрите редактор
переменных.
На рисунке 3 показана переменная myVariable, которой было присвоено
значение 26. Поменяйте значение переменной дважды щёлкнув по значению 26
и введя, к примеру, 51, а затем нажмите клавишу <Enter> или щёлкните в любом
другом месте окна.
10
О том, что значение переменной изменилось, вы уже можете узнать из
командной строки. Сделайте активным окно командной строки и введите имя
нашей переменной, т.е.
-->myVariable
myVariable =
51.
Конечно показанный способ редактирования переменной является не
самым рациональным, так как редактировать массив с одним полем проще всего
из той же командной строки. Редактор же используется в случаях, когда
необходимо редактировать большие массивы.
Не бойтесь, если вы пока ничего не понимаете. Мы ещё не раз вернемся ко
всем этим вопросам.
Всё, что вы сейчас видите в этом окне — вершина айсберга. За этой
вершиной скрывается ещё целая куча системных переменных, которые
регулируют
работу
окружения
и
часть которых
пользователь может
контролировать. Чтобы их увидеть в окне, сделайте следующее:
1.
Сделайте активным окно Обозреватель переменных;
2.
На панели меню вверху выберите пункт Фильтр (англ. Filter);
3.
В раскрывшемся меню снимите галочку с пункта Скрывать
системные переменные.
Рассмотрите эти переменные, но ни в коем случае не пробуйте их
редактировать.
2.2.Журнал команд
11
Рис. 2.2 - Окно журнала команд
Окно
журнала
команд
отражает
все
команды,
которые
вводил
пользователь в командную строку в течении текущего сеанса. На рисунке 4
показано окно журнала команд. Содержимое окна рисунка 4 может отличаться
от вашего, так как автор при написании викиучебника то и делал, что отвлекался.
Вы можете видеть записи последнего сеанса, которые отражают все
введенные нами команды. Все журналы бережно сохраняются средой, чтобы вы
могли вспомнить и восстановить команды, которые вводили ранее. Это может
быть полезным, если вы забыли сохранить коды и завершили сеанс или, другой
пример, если вы ввели очень длинную команду ранее, а теперь вам нужно ввести
похожую, но лишь с небольшой разницей, или если сеанс был прерван из-за
плохо отлаженного модуля, а команды вам ещё нужны.
Тем не менее, если вам не нужны журналы, вы всегда их можете удалить
или очистить, воспользовавшись командами меню.
3.Основные команды меню
Главное меню системы содержит команды предназначенные для работы с
файлами, настройки среды, редактирования команд текущей сессии и получения
справочной информации. Кроме того, с помощью главного меню можно
создавать, редактировать, выполнять отладку и запускать на выполнение так
называемые файлы-сценарии Scilab, а также работать с графическими
приложениям пакета.
12
4.Решение дифференциальных уравнений
Дифференциальные уравнения возникают в широком классе задач по
описанию управляемых энергетических, промышленных и других процессов и
комплексов. В настоящее время наблюдается бурное развитие робототехники,
разработка и эксплуатация новых моделей роботов и промышленных
манипуляторов, что стимулирует активные исследования по математической и
прикладной
теории
управления,
моделированию
и
конструированию
управляемых систем.
Мы рассмотрим способы исследования сложных механических систем,
моделируемых
дифференциальными
уравнениями.
Рассмотрим
способы
конструирования управления нескольких видов для механической системы с
двумя степенями свободы. А также, проведем визуализацию процесса
стабилизации движения.
4.1.Дифференциальные уравнения n-го порядка
Дифференциальным уравнением n-го порядка называется соотношение
вида
H(t,x′,x″,...,x(n))=0
Решением дифференциального уравнения является функция x(t), которая
обращает это уравнение в тождество. Дифференциальные уравнения имеют
бесконечное множество решений.
Чтобы однозначно определить решение некоторой задачи, необходимо
задавать начальные условия. Количество таких условий должно совпадать с
порядком уравнения. А решение, найденное для таких условий называется
решением задачи Коши.
4.2.Пример решения оду в Scilab
Для решения обыкновенных дифференциальных уравнений (ОДУ) в Scilab
используется функция y=ode([type],y0,t0,t,func) Разберём, что обозначает
каждый из параметров у этой функции.
13
type - необязательный строковый параметр, с помощью которого можно
выбрать
метод
решения
t0 - скаляр начальный
ОДУ.
момент
Обычно
отрезка
этот
параметр
интегрирования.
опускается.
Обычно t0=0.
y0 - начальные условия. Отметим, что y0 это вектор, размерность которого
совпадает с порядком ОДУ. Так, для ОДУ 2-го порядка необходимо задать
значения в начальный момент времени для функции и её производной, т.е.
использовать
запись y0=[0.1,0.3].
t - вектор, задающий узлы сетки, в которых ищем решение. Как правило, вектор
t задается следующим образом t=t0:d:tmax, где t0 - начальный момент отрезка
интегрирования, d - шаг дискретизации, tmax - конечный момент отрезка
интегрирования.
func - пользовательская функция, определяющая правую часть уравнения.
y - вектор решений.
Рассмотрим
использование
функции ode() на
примере
решения
следующей задачи.
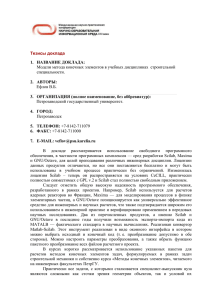
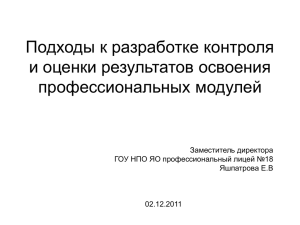
Найти угловую скорость ω(t) твердого тела вокруг неподвижной оси, если
заданы
начальная
угловая
скорость
Найти
значение ω(t) в
ускорение ε(t)=2+0.5sin(t).
Построить график функций.
14
тела ω0=1 и
момент
угловое
времени t1=1.3.
Рис. 4.2 - Cравнение графиков угловой скорости точки, по функции, найденной
аналитическим и численным интегрированием. Красным кружком обозначено
значение скорости точки в момент времени t=1.3c.
Угловая скорость точки может быть найдена из дифференциального
уравнения ω=dφdt
В нашем случае по условию задачи указаны следующие параметры для
функции ode(): t0=0 начальный момент времени, y0=1 начальное условие одно,
т.к. порядок выполнения уравнения равен 1, это начальная угловая скорость тела
ω0=1
t=t0:h:tmax - вектор, задающий узлы сетки.
Результат работы программы представлен далее
clf;
// аналитически найденная функция omega
15
function f = aomega(t)
f = 2*t-0.5*cos(t)+omega0+0.5
endfunction
//функция epsilon из условия задачи
function f=epsilon(t)
f = 2+0.5*sin(t)
endfunction
//функция решения ОДУ
function dx = syst(t,x)
dx = epsilon(t);
endfunction
t0 = 0;
// начало отрезка интегрирования
tmax = 2; // конец отрезка интегрирования
h=0.1
// шаг дискретизации
T=t0:h:t2; // вектор, задающий узлы сетки
omega0 = 1; // начальное условие
ts = 1.3; // точка, в которой нужно вычислить значение
omega = ode(omega0, t0, T, syst);
plot(T, omega, '*cya--');
plot(T, aomega(T));
plot(ts, aomega(ts), 'ro-.');
xtitle('Угловая скорость ODE w(t) и найденная аналитически', 't', 'w, w_a');
legend('Угловая скорость ODE w(t)','Угловая скорость аналитическая
w_а(t)','Значение в точке w(1.3)', 4,%t); xgrid();
16
Отметим, что в данной программе фигурирует пользовательская
функция aomega(t), представляющая собой угловую скорость, найденную
аналитически с указанным начальным условием.
Функция f=2t−0,5cos(t)+1,5 единственное решение дифференциального
уравнения, удовлетворяющее заданным начальным условиям, то есть,
функция f решение задачи Коши.
4.3.Системы дифференциальных уравнений
Для решения систем ОДУ в Scilab используется та же функция y =
ode([type], y0, t0, t, func). Однако важным требованием является запись
исследуемой системы в нормальной форме Коши.
Системой дифференциальных уравнений, записанной в нормальной форме
Коши называется система, где слева стоят производные фазовых переменных, а
справа некоторые функции, т.е. система вида
{x1′=f1(t,x1,...xn)x2′=f2(t,x1,...xn)...xn′=fn(t,x1,...xn)
Решением системы ОДУ является вектор x(t), который обращает это
уравнение в тождество. Размерность вектора равна количеству уравнений в
системе.
Стоит отметить, что дифференциальное уравнение n-ой степени может
быть представлено в виде системы из n-уравнений первой степени, что позволяет
решать задачу Коши для полученной системы ОДУ.
4.4.Примеры поиска решения систем ОДУ в Scilab
Решение системы ОДУ
Рассмотрим решение задачи Коши для системы уравнений
{x′=cos(xy)y′=sin(x+ty)
на интервале [0;10] и с начальными условиями x(0)=0,y(0)=0.
Для поиска решения данной задачи, нам необходимо привести исходную
систему
к
нормальному
виду
Коши.
Для
этого
введём
новые
переменные (z1,z2) и сделаем необходимые переобозначения в исходной
системе:
17
Рассмотрим решение задачи Коши для системы уравнений
{z1=xz2=y{z1′=cos(z1z2)z2′=sin(z1+tz2)
Код
программы,
реализующей
поиск
решения
системы
дифференциальных уравнений представлен на листинге 16. Обратите внимание,
как происходит обращение к компонентам вектора решения z(t).
clc;
//Функция, описывающая правую часть OДУ
function dz = syst(t,z)
dz = zeros(2,1);
dz(1) = cos(z(1)*z(2));
dz(2) = sin(z(1)+z(2)*t);
endfunction
//Начальтные условия
t0 = 0; tmax = 10; x0 = [0;0]; t= t0:0.1:tmax;
z = ode(x0, t0, t, syst);
plot(t, z(1,:));
plot(t, z(2,:), "c-");
xtitle('Решение системы ОДУ 2-го порядка', 't', 'z');
legend('Компонента x решения','Компонента y решения', 2,%t); xgrid();
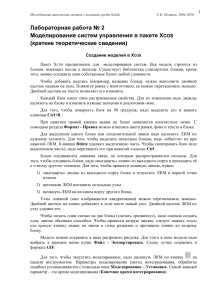
Программа поиска решения системы дифференциальных уравнений с его
графической интерпретацией.
Для наглядной реализации сформировано графическое решение на рис. 4.3.
18
Рис. 4.4 - Графическое решение задачи Коши с помощью функции ode().
4.5.Решение системы ОДУ в матричной форме
Рассмотрим решение задачи Коши для системы уравнений, заданных в
матричном виде
dydx=Ax,y=(y1y2),A=(201−1)
на интервале [0;10] и начальными условиями y1(0)=1,y2(0)=0.
Код
программы,
реализующей
поиск
решения
системы
дифференциальных уравнений представлен на листинге 17. Обратите внимание,
как происходит обращение к компонентам вектора решения y(t).
clc;clf();
19
//Функция, описывающая правую часть ОДУ
function dy = syst(x, y, A)
dy = A*x;
endfunction
A = [2,0;1,-1];
//Начальтные условия
t0 = 0; tmax = 10; t= t0:0.1:tmax;
y0 = [1; 0];
y = ode(y0, t0, t, list(syst, A));
plot(t, y(1,:));
plot(t, y(2,:), "c-");
xtitle('Решение ОДУ 2-го порядка встроенной функцией ode()', 't', 'y');
legend('Компонента y1 решения','Компонента y2 решения', 2,%t); xgrid();
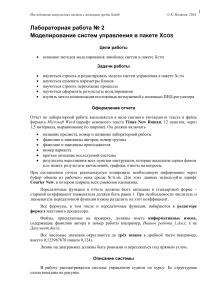
Решение задачи Коши для системы ОДУ, в матричной форме на языке
Scilab.
Для наглядной реализации сформировано графическое решение на рис. 4.4.
20
Рис. 4.5 - Графическое решение задачи Коши с помощью функции ode().
4.6.Решение ДУ 2-го порядка путём сведения к системе уравнений
Продолжим знакомиться с возможностями функции ode() на примере
решения задачи механики на второй закон Ньютона.
Груз находится на пружине жёсткости c=12 H/м, масса груза m=68.7 кг.
Определить
закон
движения
груза,
если
на
него
действует
сила F=100.5sin(2t)+2π3 H.
По 2-му закону Ньютона, движение груза описывается с помощью
дифференциального уравнения 2-й степени, которое имеет вид:
mx¨=−cx+F(t)
и начальными условиями x(0)=0,; x˙(0)=0.
Как известно, ОДУ второго порядка сводится к системе в нормальной
форме Коши, состоящей из двух уравнений первой степени. Введём новые
переменные (z1,z2) и сделаем необходимые переобозначения в исходной
системе:
{z1=xz2=x˙{z˙1=z2z˙2=1m(−cz1+F(t))
21
Код
программы,
реализующей
поиск
решения
системы
дифференциальных уравнений представлен далее. Обратите внимание, как
происходит обращение к компонентам вектора решения y(t).
clc;clf();
//Функция, действующая на груз F
function f = F(t)
f = 100.5*sin(2*t) + 2*%pi/3;
endfunction
//Функция, описывающая правую часть СДУ
function dz = syst(t, z, m, c)
dz = zeros(2,1);
dz(1) = z(2);
dz(2) = ( 1/m )*( -c*z(1) + F(t) );
endfunction
m = 68.7; // масса груза
c = 12; // Жёсткость пружины
//Начальтные условия
t0 = 0; tmax = 20; t= t0:0.01:tmax;
z0 = [0; 0];
z = ode(y0, t0, t, list(syst, m, c));
subplot(211);
plot(t, z(1,:));
22
xtitle('Компонента z1 решения СЛДУ 2-го порядка', 't', 'z1');
xgrid();
subplot(212);
plot(t, z(2,:), "r-");
xtitle('Компонента z2 решения СЛДУ 2-го порядка', 't', 'z2');
xgrid();
Решение дифференциального уравнения 2-ой степени, путём сведения к
системе из 2-х уравнений 1-ой степени на языке Scilab.
Для наглядной реализации сформировано графическое решение на рис. 4.6.
Компонента z1 представляет собой координату груза, а компонента z2 - скорость
груза.
Рис. 4.6 - Графическое решение задачи Коши с помощью функции ode().
23
5. gPROMS ModelBuilder
gPROMS ModelBuilder — это среда, в которой специалисты по
моделированию могут создавать, проверять и выполнять стационарные и
динамические модели процессов, а также развертывать их в организации.
Он
предоставляет
все
возможности
расширенной
платформы
моделирования процессов gPROMS для создания пользовательских моделей и
управления ими, от отдельных блоков, таких как новые реакторы, до целых сред
моделирования и оптимизации корпоративных процессов.
Сборка, проверка, выполнение, развертывание
Мощный язык моделирования процессов платформы gPROMS позволяет
специалистам по моделированию
создавать пользовательские модели
процессов практически любого уровня сложности и
соответствие
экспериментальным
или
проверять
производственным
их на
данным
с
использованием встроенных передовых методов оценки параметров.
Модели можно комбинировать с другими пользовательскими или
библиотечными моделями в технологической схеме. Затем вы можете применить
стационарное и динамическое моделирование платформы gPROMS и лучшие в
отрасли
возможности
оптимизации
для
создания
высокоточной
прогностической информации для поддержки принятия решений в области
инноваций, проектирования и эксплуатации продуктов и процессов.
Возможности управления библиотекой позволяют легко предоставлять
модели пользователям по всей организации. Модели могут быть защищены
(зашифрованы) в целях безопасности и обеспечения качества.
1.Построить
Мощные возможности пользовательского моделирования
создавать базовые модели практически любого типа процесса:
24
позволяют
Простое пользовательское моделирование без необходимости
программировать численные методы решения
Моделирование сосредоточенных и распределенных параметров
(пространственное распределение, распределение по размерам и т. д.)
Мощная обработка разрывов
Установившиеся и динамические модели в одной среде
Язык TASK для операционной политики
Несколько вариантов физических свойств
2.Подтвердить
Затем вы можете
экспериментальным
подогнать параметры эмпирической модели
(лабораторным,
экспериментальным
к
или
эксплуатационным) данным, чтобы получить модели с высокой степенью
прогнозирования:
Расширенные возможности оценки параметров
Оценка нескольких параметров из нескольких стационарных и
динамических экспериментов
Полный статистический анализ неопределенности параметров для
поддержки анализа рисков и принятия решений об инвестициях в НИОКР
Расширение
возможностей
прогнозирования
модели
первых
принципов
К этому моменту вы объединили корпоративные знания в проверенную на
основе первых принципов модель с возможностью точного прогнозирования.
Теперь это можно применить для создания ценности и конкурентного
преимущества несколькими способами:
3.Выполнить
25
Вы можете выполнять стационарное и динамическое моделирование и
оптимизацию, чтобы быстро и эффективно изучить пространство решений,
чтобы:
Оптимизация конструкции агрегата для минимизации капитальных
затрат, повышения удобства эксплуатации и т. д.
Оптимизируйте работу, чтобы свести к минимуму потребление
энергии, сырья и т. д.
Оптимизация
операционной
политики
для
определения
оптимальных процедур запуска или смены сорта
Оптимизация всей установки для улучшения ее экономики
Выполняйте масштабирование сложных единиц, связывая их с CFD
для микширования эффектов, где это необходимо.
4.Развернуть
Вы можете получить дополнительную отдачу от инвестиций, развернув
модели по всей организации:
Как операции по запросу или инструменты поддержки принятия
решений о покупке, выполняемые в веб-браузере.
В
онлайн-исполнении
как
часть
системы
автоматизации
предприятия для мониторинга, оптимизации и прогнозного моделирования
Для поддержки дизайна, выполнения в MS Excel, веб-браузерах,
VBA или других пользовательских интерфейсах.
В других инженерных программах, таких как Aspen Plus® от Aspen
Technology, PRO/II® от Schneider Electric SimSci , ANSYS FLUENT® или MATLAB®
от
The Mathworks .
5.1.Особенности и преимущества
26
Платформа gPROMS обладает многими преимуществами благодаря своим
возможностям моделирования и решения, а также ориентированности на
технологическую отрасль . Вот лишь некоторые из них:
В отличие от более общих сред математического моделирования,
ModelBuilder предназначен специально для
моделирования процессов с его
подходом единиц и потоков, редактором технологических схем и несколькими
вариантами физических свойств .
Ведущие в мир возможности пользовательского моделирования,
которые позволяют легко создавать собственные пользовательские модели
практически любого уровня сложности, собирая корпоративные знания таким
образом, чтобы их можно было использовать для создания ценности и
конкурентного преимущества.
Мощные возможности оптимизации, которые позволяют определять
оптимальные ответы напрямую, а не путем моделирования методом проб и
ошибок, экономят время и сокращают время выхода на рынок новых процессов
или улучшений.
Средства управления библиотекой, которые позволяют создавать
простые в обслуживании библиотеки моделей и предоставлять их пользователям
по всей организации.
одной
Возможности стационарного и динамического моделирования в
структуре
исследовать
позволяют оптимизировать рабочие
важные
переходные
эффекты
и
процессы,
легко
оптимизировать
производительность переходных процессов.
Ведущие в мире методы численного решения, которые дают быстрые
и надежные ответы и являются достаточно быстрыми, чтобы их можно было
использовать в крупномасштабной оптимизации.
Средства экспорта моделей в пакеты моделей для выполнения в
других средах инженерного программного обеспечения через gPROMS Objects
.
27
Усовершенствованная среда создания технологических карт
,
позволяющая использовать ваши пользовательские модели в технологических
схемах вместе с моделями библиотеки gPROMS gML и AML .
Долгосрочные преимущества
Систематические инвестиции в расширенное моделирование процессов
могут принести значительные долгосрочные выгоды. Вы можете:
ускорить
внедрение
инноваций:
технологии
оптимизации
в
сочетании с точными прогностическими моделями могут помочь значительно
сократить циклы проектирования, а также сократить время выхода на рынок
новых процессов и усовершенствований процессов.
Надежно оптимизируйте проектирование и работу процессов на
основе точных прогнозов, полученных с помощью проверенных на основе
первых принципов моделей.
зафиксировать корпоративные знания — например, характеристику
реакции — в форме, в которой их можно использовать для создания ценности
группами по всей организации.
использовать
существующие
инвестиции
и
академические
исследования для создания конкурентного преимущества за счет внедрения
знаний, полученных в рамках корпоративных моделей.
сократить время и стоимость экспериментов за счет объединения
экспериментов НИОКР и инженерного проектирования
управлять рисками, определяя неопределенность параметров и
определяя, куда инвестировать в исследования и разработки, а также в целом с
помощью количественной поддержки принятия решений.
6.COM (Component Object Model)
Component Object Model (COM) это стандарт двоичного интерфейса для
программных компонентов , представленный Microsoft в 1993 году. Он
используется для обеспечения возможности создания объектов межпроцессного
взаимодействия в большом количестве языков программирования . COM
28
является основой для нескольких других технологий и сред Microsoft, включая
OLE , OLE Automation , Browser Helper Object , ActiveX , COM+ , DCOM ,
оболочку Windows , DirectX , UMDF и Среда выполнения Windows .OLEсервисы охватывают различные аспекты часто используемых системных
функций, включая составные документы, настраиваемые элементы управления,
сценарии между приложениями, передачу данных и другие взаимодействия с
программным обеспечением.
Технологии OLE построены друг на друге, а COM — в их основе.
Суть СОМ заключается в независимом от языка способе реализации
объектов, которые можно использовать в средах, отличных от той, в которой они
были созданы, даже за пределами машин. Для тщательно разработанных
компонентов СОМ допускает повторное использование объектов без знания их
внутренней реализации, поскольку это заставляет разработчиков компонентов
предоставлять четко определенные интерфейсы , которые отделены от
реализации. Различная семантика распределения языков обеспечивается за счет
возложения на объекты ответственности за их собственное создание и
уничтожение посредством подсчета ссылок . Преобразование типов между
различными интерфейсами объекта достигается с помощью QueryInterface метод.
29
Предпочтительным методом «наследования» в COM является создание
подобъектов, которым делегируются «вызовы» методов.
COM — это технология интерфейса, определенная и реализованная в
качестве стандарта только в Microsoft Windows и Apple Core Foundation 1.3 и
более
поздних
версиях
подключаемого
интерфейса
прикладного
программирования (API). Последний реализует только подмножество всего
COM-интерфейса. Для некоторых приложений COM был заменен, по крайней
мере в некоторой степени, платформой Microsoft .NET и поддержкой веб-служб
через Windows Communication Foundation (WCF). Однако COM-объекты можно
использовать со всеми языками .NET через .NET COM Interop . Сетевой DCOM
использует собственные двоичные форматы., а WCF поощряет использование
обмена сообщениями SOAP на основе XML . COM очень похож на другие
технологии интерфейсов компонентного программного обеспечения , такие как
CORBA и Enterprise JavaBeans , хотя каждая из них имеет свои сильные и слабые
стороны. В отличие от C++, COM предоставляет стабильный двоичный
интерфейс приложения (ABI), который не меняется между выпусками
компилятора. Это делает COM-интерфейсы привлекательными для объектноориентированных библиотек C++, которые должны использоваться клиентами,
скомпилированными с использованием разных версий компилятора.
СОМ-программисты создают свое программное обеспечение, используя
компоненты , поддерживающие СОМ . Различные типы компонентов
идентифицируются идентификаторами классов (CLSID), которые являются
глобальными
уникальными
идентификаторами
(GUID).
Каждый
COM-
компонент предоставляет свою функциональность через один или несколько
интерфейсов
.
Различные
интерфейсы,
поддерживаемые
компонентом,
отличаются друг от друга с помощью идентификаторов интерфейса (IID),
которые также являются идентификаторами GUID. COM-интерфейсы имеют
привязки к нескольким языкам, таким как C , C++ , Visual Basic , Delphi , Python
и несколько языков сценариев, реализованных на платформе Windows. Весь
доступ к компонентам осуществляется через методы интерфейсов. Это позволяет
30
использовать такие методы, как межпроцессное или даже межкомпьютерное
программирование (последнее с использованием поддержки DCOM).
6.1.Интерфейсы
Все COM-компоненты реализуют интерфейс IUnknown ( custom ), который
предоставляет методы для подсчета ссылок и преобразования
типов
(приведения). Пользовательский интерфейс IUnknown состоит из указателя на
таблицу виртуальных методов , которая содержит список указателей на функции,
реализующие функции, объявленные в интерфейсе, в том же порядке, в котором
они объявлены в интерфейсе. Таким образом, накладные расходы на вызовы
внутри процесса сопоставимы с вызовами виртуальных методов в C++ . В
дополнение к пользовательским интерфейсам COM также поддерживает
интерфейсы диспетчеризации , наследуемые от IDispatch.. Интерфейсы
диспетчеризации поддерживают позднее связывание для OLE-автоматизации .
Это позволяет изначально получать доступ к диспетчерским интерфейсам из
более широкого диапазона языков программирования, чем к пользовательским
интерфейсам.
6.2.Классы
Класс COM ("coclass") представляет собой конкретную реализацию одного
или нескольких интерфейсов и очень похож на классы в объектноориентированных языках программирования. Классы создаются на основе их
идентификатора класса ( CLSID ) или на основе их строки программного
идентификатора ( ProgID ). Как и многие объектно-ориентированные языки,
COM обеспечивает отделение интерфейса от реализации. Это различие особенно
заметно в COM, где к объектам нельзя получить доступ напрямую, а только через
их интерфейсы. COM также поддерживает несколько реализаций одного и того
же интерфейса, так что клиенты во время выполнения могут выбирать, какую
реализацию интерфейса создавать.
6.3.Язык определения интерфейса и библиотеки типов
31
Библиотеки типов содержат метаданные для представления COM-типов.
Эти типы описываются с использованием языка определения интерфейса
Microsoft (MSIDL/IDL). Файлы IDL определяют объектно-ориентированные
классы, интерфейсы, структуры, перечисления и другие определяемые
пользователем типы независимым от языка способом. IDL внешне похож на
объявления C++ с некоторыми дополнительными ключевыми словами, такими
как «интерфейс» и «библиотека», для определения интерфейсов и коллекций
классов. IDL также поддерживает использование атрибутов в квадратных
скобках перед объявлениями для предоставления дополнительной информации,
такой как идентификаторы GUID интерфейса и отношения между параметрами
указателя и полями длины. Файлы IDL компилируются компилятором MIDL.
Для
C/C++
компилятор
MIDL
создает
независимый
от
компилятора
заголовочный файл, содержащий определения структур, соответствующие
таблицам виртуальных таблиц объявленных интерфейсов, и файл C, содержащий
объявления идентификаторов GUID интерфейса . Исходный код C++ для проксимодуля также может быть сгенерирован компилятором MIDL. Этот прокси
содержит заглушки методов для преобразования вызовов COM в вызовы
удаленных процедур.чтобы включить DCOM для связи вне процесса. Файлы IDL
также могут быть скомпилированы компилятором MIDL в библиотеку типов
(TLB).
Файлы
TLB
содержат
двоичные
метаданные,
которые
могут
обрабатываться различными языковыми компиляторами и средами выполнения
(например, VB, Delphi, .NET и т. д.) для создания конструкций, зависящих от
языка, для представления типов COM, определенных в TLB. Для C++ это
преобразует TLB обратно в его представление IDL.
6.4.Каркас объекта
Поскольку COM является средой выполнения, типы должны быть
индивидуально идентифицируемыми и определяемыми во время выполнения.
Для этого используются глобальные уникальные идентификаторы (GUID).
Каждому типу COM назначается собственный GUID для идентификации во
время выполнения. Чтобы информация о типах COM была доступна как во время
32
компиляции, так и во время выполнения, COM использует библиотеки типов.
Именно благодаря эффективному использованию библиотек типов COM
реализует свои возможности в качестве динамической среды для взаимодействия
объектов.
Рассмотрим следующий пример определения составного класса в IDL:
coclass SomeClass {
[по умолчанию] интерфейс ISomeInterface;
};
Приведенный выше фрагмент кода объявляет COM-класс с именем
SomeClass , который реализует интерфейс с именем ISomeInterface .
Концептуально это эквивалентно определению следующего класса C++:
класс SomeClass : общедоступный ISomeInterface {
...
...
};
где ISomeInterface — чистый виртуальный класс C++ (иногда называемый
абстрактным базовым классом).
Файлы IDL, содержащие COM-интерфейсы и классы, компилируются в
файлы
библиотек
типов
(TLB),
которые
впоследствии
могут
быть
проанализированы клиентами во время выполнения, чтобы определить, какие
интерфейсы поддерживает объект, и вызвать методы интерфейса объекта.
В C++ объекты COM создаются CoCreateInstance функцией, которая
принимает идентификатор класса (CLSID) и идентификатор интерфейса (IID) в
качестве аргументов. Создание экземпляра SomeClass может быть реализовано
следующим образом:
ISomeInterface * interface_ptr = NULL ;
33
HRESULT hr = CoCreateInstance ( CLSID_SomeClass , NULL ,
CLSCTX_ALL ,
IID_ISomeInterface , ( void ** ) & interface_ptr );
В этом примере подсистема COM используется для получения указателя
на объект, который реализует ISomeInterface интерфейс, и требуется конкретная
реализация этого интерфейса в компонентном классе CLSID SomeClass.
6.5.Подсчет ссылок
Все COM-объекты используют подсчет ссылок для управления временем
существования объекта. Счетчики ссылок контролируются клиентами с
помощью методов AddRef и Release в обязательном интерфейсе IUnknown,
который
реализуют
все
COM-объекты.
Затем
COM-объекты
несут
ответственность за освобождение своей памяти, когда счетчик ссылок падает до
нуля. Некоторые языки (например, Visual Basic ) обеспечивают автоматический
подсчет ссылок, так что разработчикам COM-объектов не нужно явно
поддерживать какие-либо внутренние счетчики ссылок в своих исходных кодах.
В C++ кодировщик может либо выполнять явный подсчет ссылок, либо
использовать интеллектуальные указатели для автоматического управления
подсчетом ссылок.
Ниже приведены рекомендации по вызову AddRef и Release для COMобъектов
Функции и методы, которые возвращают ссылки на интерфейс (через
возвращаемое значение или через параметр «out»), перед возвратом должны
увеличивать счетчик ссылок возвращаемого объекта.
Release должен быть вызван для указателя интерфейса до того, как
указатель будет перезаписан или выйдет за пределы области видимости.
Если делается копия указателя ссылки на интерфейс, для этого
указателя следует вызывать AddRef .
34
AddRef и Release должны вызываться для конкретного интерфейса,
на который ссылаются, поскольку объект может реализовывать счетчики ссылок
для каждого интерфейса, чтобы выделять внутренние ресурсы только для
интерфейсов, на которые ссылаются.
Не все вызовы подсчета ссылок отправляются удаленным объектам по
сети; прокси хранит только одну ссылку на удаленный объект и поддерживает
свой собственный локальный счетчик ссылок. Чтобы упростить разработку
COM, Microsoft представила ATL (библиотеку активных шаблонов) для
разработчиков C++. ATL обеспечивает парадигму разработки COM более
высокого уровня. Это также ограждает разработчиков клиентских приложений
COM от необходимости напрямую поддерживать подсчет ссылок, предоставляя
объекты интеллектуальных указателей . Другие библиотеки и языки,
поддерживающие COM, включают Microsoft Foundation Classes , поддержку
COM компилятора VC , VBScript , Visual Basic , ECMAScript ( JavaScript) и
Борланд Делфи
6.6.Программирование
COM — это независимый от языка двоичный стандарт, который может
быть разработан на любом языке программирования, способном понимать и
реализовывать определенные двоичные типы данных и интерфейсы. Реализации
COM отвечают за вход в среду COM и выход из нее, создание экземпляров
объектов COM и подсчет ссылок, запрос объектов на наличие поддерживаемых
интерфейсов, а также обработку ошибок. Компилятор Microsoft Visual C++
поддерживает расширения языка C++ , называемые атрибутами C++ .Эти
расширения предназначены для упрощения разработки COM и удаления
большей части стандартного кода , необходимого для реализации COM-серверов
на C++.
6.7.Использование реестра
В Windows классы COM, интерфейсы и библиотеки типов перечислены в
реестре по идентификаторам GUID в разделе HKEY_CLASSES_ROOT\CLSID
35
для классов и HKEY_CLASSES_ROOT\Interface для интерфейсов. Библиотеки
COM используют реестр для поиска либо правильных локальных библиотек для
каждого COM-объекта, либо сетевого расположения для удаленной службы.
6.8.COM без регистрации
COM без регистрации (RegFree COM) — это технология, представленная в
Windows XP , которая позволяет компонентам объектной модели компонентов
(COM) хранить метаданные активации и CLSID ( Class ID ) для компонента без
использования реестра . Вместо этого метаданные и CLSID классов,
реализованных в компоненте, объявляются в манифесте сборки (описанном с
помощью XML ), сохраняемом либо как ресурс в исполняемом файле, либо как
отдельный файл, устанавливаемый вместе с компонентом. Это позволяет
устанавливать несколько версий одного и того же компонента в разные каталоги,
описываемые их собственными манифестами, а также развертывание XCOPY .
Этот метод имеет ограниченную поддержку серверов EXE COM] и не может
использоваться для системных компонентов, таких как MDAC , MSXML ,
DirectX или Internet Explorer .
Во время загрузки приложения загрузчик Windows ищет манифест. Если
он присутствует, загрузчик добавляет информацию из него в контекст
активации. Когда фабрика классов COM пытается создать экземпляр класса,
контекст активации сначала проверяется, чтобы увидеть, можно ли найти
реализацию для CLSID. Только в случае неудачи поиска реестр сканируется.
6.9.Создание экземпляров COM –объектов вручную
COM-объекты также можно создавать вручную, учитывая путь к DLL файлу и GUID объекта. Это не требует регистрации DLL или GUID в системном
реестре и не использует файлы манифеста. COM-DLL экспортирует функцию с
именем DllGetClassObject. Вызов DllGetClassObject с нужным идентификатором
GUID и IID_IClassFactory предоставляет экземпляр объекта фабрики . Объект
Factory имеет метод CreateInstance, который может создавать экземпляры
объекта с заданным GUID интерфейса. Это тот же внутренний процесс, который
36
используется
при
создании
экземпляров
зарегистрированных
COM-
компонентов.
Если созданный COM-объект создает экземпляр другого COM-объекта с
помощью универсального API CoCreateInstance, он попытается сделать это
обычным универсальным способом, используя файлы реестра или манифеста.
Но он может создавать внутренние объекты (которые могут быть вообще не
зарегистрированы) и раздавать им ссылки на интерфейсы, используя свои
приватные знания.
6.10.Прозрачность процессов и сети
COM-объекты могут быть прозрачно созданы и на них можно ссылаться
внутри одного и того же процесса (внутри процесса), за пределами процесса (вне
процесса) или удаленно по сети (DCOM). Внепроцессные и удаленные объекты
используют маршаллинг для сериализации вызовов методов и возврата значений
за границы процесса или сети. Эта сортировка невидима для клиента, который
обращается к объекту, как если бы он был локальным внутрипроцессным
объектом.
6.11.Резьба
В COM многопоточность реализуется с помощью концепции, известной
как «апартаменты»
Отдельный COM-объект находится ровно в одном
апартаменте, который может быть однопоточным или многопоточным. В COM
существует три типа апартамента: однопоточный апартамент (STA) ,
многопоточный апартамент (MTA) и нейтральный по потоку апартамент .(НА).
Каждая квартира представляет собой один механизм, с помощью которого
внутреннее
состояние
объекта
может
быть
синхронизировано
между
несколькими потоками. Процесс может состоять из нескольких COM-объектов,
некоторые из которых могут использовать STA, а другие — MTA. Все потоки,
обращающиеся к COM-объектам, также живут в одной квартире. Выбор
апартамента для COM-объектов и потоков определяется во время выполнения и
не может быть изменен.
37
7.Advanced Process Control APC
Практический каждый промышленный процесс в мире находится под
автоматическим контролем. Накопленные данные о состоянии технологического
процесса, данные о действиях диспетчерского персонала, характеристики
исходного сырья могут и должны быть использованы для улучшения управления
технологическим
процессом
для
повышения
технико-экономических
показателей производства.
7.1.Цели APC
Проанализировать состояние технологического процесса с точки зрения
его оптимальности и, при необходимости, внести коррективы в расчет
управляющих
параметров
позволяют
Системы
Усовершенствованного
Управления Технологическим Процессом (СУУТП) или Advanced Process
Control(APC). Ключевые цели внедрения APC – снижение потерь и
эксплуатационных затрат и увеличение прибыли производства путем вывода
всей цепочки технологических процессов на оптимальный режим работы.
APC – это подход к управлению, в центре которого находится ИТ-система,
выводящая и поддерживающая такой режим работы объекта, который является
оптимальным
с
технико-экономической
точки
зрения.
APC-решения
интегрируются с имеющимися на предприятии АСУТП (DCS) для оптимального
регулирования установки и сосуществуют с MES и ERP системами, дополняя их.
7.2.Model Predictive Control
Сердцем APC-системы является прогнозирующая модель управляемого
процесса (Model Predictive Control), которая включается в контур управления в
режиме реального времени. Различные APC-решения конкурируют друг с
другом за счет точности математической модели, которая определяется
полнотой математического описания процесса/объекта, гибкостью настройки
модели по данным технологического процесса, возможностью модели
самообучаться и отслеживать изменение характеристик процесса/объекта.
38
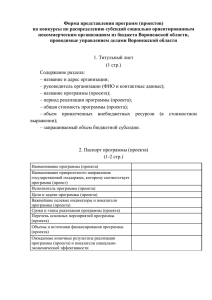
Представление взаимодействия APC в составе АСУ ТП
7.3.Интегрирование APC
Интегрирование APC-системы полностью сохраняет классическое PIDрегулирование, но в отличие от него стабилизирует процесс быстрее.
Перерегулирование (при изменении задания) протекает значительно быстрее и
плавно без перегрузок на исполнительные устройства и основное оборудование.
APC-система позволяет рассчитать значения управляющих воздействий и
стабилизировать процесс в технологически допустимом, и при этом наиболее
экономически эффективно, состоянии равновесия.
Практический любой производственный показатель, не измеряемый
напрямую, может быть рассчитан на основании прогнозной модели. По модели
возможно предсказать момент превышения порога отклонения показаний
датчиков и рассчитать корректирующие воздействия, которые передаются PIDрегуляторам. Это исключает ситуацию выхода реальных значений за рамки
заданных допустимых отклонений. Таким образом, APC-система выступает в
роли
ведущего
регулятора,
автоматически
рассчитывая
управляющие
воздействия для оптимального режима работы, а PID-регуляторы – в роли
ведомых.
39
7.4.Внедрение APC
Принимая во внимание задачи оптимизации управления технологическим
процессом, от заказчика требуется активное вовлечение специалистов
различных служб и подразделений: операторов технологического объекта,
технологов конкретного участка производства и общезаводского уровня,
специалистов по АСУТП и КИП, работников заводской лаборатории, персонала
плановой службы предприятия. Крайне важно привлечение всех специалистов к
построению APC-системы на этапе внедрения, т.к. специалисты станут
активными пользователями APC-системы после её запуска в промышленную
эксплуатацию.
APC-проекты,
как
затрагивающие
многие
аспекты
технологического процесса, должны быть инициированы и проконтролированы
на высоком уровне руководства.
Внедрение APC – это решения не просто внедрение нового ПО, это более
широкий
комплекс
мероприятий.
Идеология
APC
предполагает
переориентирование культуры всего предприятия на то, чтобы оптимизировать
существующие
технологические
процессы
и
сделать
из
максимально
прозрачными.
7.5.Возможности и функции APC-системы
APC управляет установкой в автоматическом режиме. Процесс «сбор
данных – прогнозирование – расчет и выдача новых уставок» повторяется на
каждом временном такте:
APC-система работает в режиме «реального времени».
APC – это своего рода «автопилот» для технологической установки,
но с более развитыми оптимизационными функциями, чем у автопилота и
подобных ему систем.
APC-система управляет установкой, а оператор управляет APC-
системой.
40
Визуализация в режиме реального времени показателей качества
продуктов посредством виртуальных анализаторов
Автоматическое управление показателями качества и другими
важными технологическими переменными
Стабилизация технологического режима
Поиск
и
поддержание
оптимальных
режимов
технологического объекта по технико-экономическим критериям
Уменьшение числа нарушений режима, снижение потерь
Повышение уровня автоматизации производства
Повышение надежности производства
41
работы
Вывод
Мы ознакомились с основными особенностями пакета Scilab, а также таких
программ как gPROMS ModelBuilder, COM (Component Object Model) и
Advanced Process Control APC.
gPROMS ModelBuilder ProcessBuilder предоставляет большинство центров
инновационной системы моделирования процессов gPROMS для создания и
управления пользовательскими версиями от отдельных блоков, таких как новые
реакторы, до моделирования всего корпоративного процесса в дополнение к
средам оптимизации. Более того, с этим приложением Freestyle прост и не
требует программирования процедур численного решения.
COM - это не язык программирования, а подход (спецификация) к
созданию программ, обеспечивающий взаимодействие программ любых типов.
Компоненты COM объединяются друг с другом для создания приложений или
систем компонентов. Компоненты можно менять во время выполнения, без
перекомпиляции или перекомпоновки приложения. COM - это основа, на
которой построены такие технологии Microsoft, как ActiveX, DirectX и OLE.
APC (от Advanced Process Control), - это широкий спектр программноалгоритмических средств, применение которых в сочетании с проблемноориентированными экономическими и организационными подходами позволяет
оптимизировать работу технологических объектов путем рационализации
управления ими.
42
Список литературы
1.
http://lug-mgn.ru - 05.07.2022
2.
https://ru.wikibooks.org - 05.07.2022
3.
https://studfile.net - 05.07.2022
4.
https://inclab.ru - 05.07.2022
5.
https://www.psenterprise.com - 05.07.2022
6.
https://en.wikipedia.org - 05.07.2022
7.
http://rd-science.com - 05.07.2022
43
Рецензии:
Рецензия на отчет Бакиев Руслан Маратович, вариант 2
рецензент Маркин Кирилл Сергеевич.
Итог автора
+/Работа передана на рецензию в срок
+
Работа передана на рецензию не в срок
Раздел Универсальный математический пакет SCILAB
Тема раздела раскрыта, все примеры относятся к теме реферата
+
Тема раздела раскрыта, не все примеры относятся к теме реферата
Тема раздела не раскрыта, не все примеры относятся к теме реферата
Все примеры описаны полностью и результаты представлены подробно
+
Все примеры описаны полностью, но результаты даны без пояснения
Описаны полностью не все примеры, но результаты даны подробно
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Раздел содержит до 5 примеров
+
Раздел содержит более 5 примеров
+
Раздел Пакеты моделирования технологических процессов
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
Текст раздела понятен, не требует дополнительного объяснения
Текст раздела плохо понятен, требует дополнительного объяснения
+
Раздел Стандарты взаимодействия программных продуктов
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
+
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Раздел Уровни автоматизации предприятий и производств
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
+
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Общие требования к отчету по практике
Отчет отформатирован по требованиям
+
Поля и нумерация страниц соответствуют требованиям
+
Шрифт, его размер, отступ первой строки, междустрочный интервал абзаца +
соответствуют требованиям
Заголовки отформатированы по требованиям
+
Присутствуют Оглавление, Введение, Выводы, Список источников
+
Объем отчета до 35 страниц
Объем отчета до 40 страниц
+
Объем отчета свыше 45 страниц
-
44
Рецензия положительная после первой проверки, помощь автора для решения +
примеров не потребовалась
Рецензия положительная после второй проверки и помощи автора для решения примеров
Рецензия на отчет Сейдаметова Яна Тимуровна, вариант 13
рецензент Бакиев Руслан Маратович
Итог автора
+/Работа передана на рецензию в срок
+
Работа передана на рецензию не в срок
Раздел Универсальный математический пакет SCILAB
Тема раздела раскрыта, все примеры относятся к теме реферата
+
Тема раздела раскрыта, не все примеры относятся к теме реферата
Тема раздела не раскрыта, не все примеры относятся к теме реферата
Все примеры описаны полностью и результаты представлены подробно
+
Все примеры описаны полностью, но результаты даны без пояснения
Описаны полностью не все примеры, но результаты даны подробно
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Раздел содержит до 5 примеров
Раздел содержит более 5 примеров
+
Раздел Пакеты моделирования технологических процессов
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
+
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Раздел Стандарты взаимодействия программных продуктов
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
+
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Раздел Уровни автоматизации предприятий и производств
Тема раздела раскрыта полностью
+
Раздел иллюстрирован рисунками
+
Текст раздела понятен, не требует дополнительного объяснения
+
Текст раздела плохо понятен, требует дополнительного объяснения
Общие требования к отчету по практике
Отчет отформатирован по требованиям
Поля и нумерация страниц соответствуют требованиям
+
Шрифт, его размер, отступ первой строки, междустрочный интервал абзаца +
соответствуют требованиям
Заголовки отформатированы по требованиям
+
Присутствуют Оглавление, Введение, Выводы, Список источников
+
Объем отчета до 35 страниц
-
45
Объем отчета до 40 страниц
Объем отчета свыше 45 страниц
Рецензия положительная после первой проверки, помощь автора для решения
примеров не потребовалась
Рецензия положительная после второй проверки и помощи автора для решения
примеров
46
+
+
-