РЕГУЛЯТОР ГРУППОВОГО УПРАВЛЕНИЯ МНОГОКОНТУРНОЙ
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО
ДВИГАТЕЛЯ НА ОСНОВЕ НЕЧЕТКОЙ ЛОГИКИ
Специальность 2.3.2 – Вычислительные системы и их элементы
диссертация на соискание ученой степени
кандидата технических наук
Сторожев Сергей Александрович
ассистент, аспирант кафедры «Автоматика и телемеханика»
ПНИПУ
Научный руководитель: Южаков Александр Анатольевич
доктор технических наук, профессор, зав. кафедры
«Автоматика и телемеханика» ПНИПУ
Актуальность
Зачастую, газотурбинные двигатели (ГТД) являются
объектами управления, число управляющих воздействий которых
меньше числа контуров управления.
К таким системам относятся системы автоматического
управления (САУ) подачей топлива в камеру сгорания ГТД.
Селективный выбор реализуется с помощью элементов
минимума и максимума на базе экстремальной логики.
Селекторы применяются в САУ ГТД для устранения зоны
совместной работы контуров управления.
2
Актуальность
В работах А.Н. Добрынина, И.Л. Письменного, О.С. Гуревича, Ф.Д. Гольберга
доказано, что селекторы эффективны только для статических режимов работы САУ ГТД.
При переходных режимах и при воздействии помех появляются противоречия выбора того
или иного контура, из-за этого возникают скачки и перерегулирование параметров ГТД.
Следовательно, ухудшаются динамические характеристики САУ и снижается ресурс ГТД.
Алгоритмы адаптации САУ ГТД с селектором рассмотрены в работах Е.И. Юревича,
Дж. Саридиса, А.А. Красовского, И.Б. Рубашкина, А.Г. Ивахненко, Ю.П. Зайченко, В.Д.
Димитрова, В.И. Петунина. Адаптация позволяет подготовить разомкнутые контуры к
моменту их включения за счет согласования контуров управления.
Применение нечёткой логики в селекторе вышеперечисленными авторами не
рассматривалось. Замена экстремальной логики на нечеткую позволяет улучшить
динамические характеристики и повысить помехоустойчивость САУ ГТД, следовательно,
увеличить ресурс ГТД.
3
Актуальность
К многоконтурным САУ ГТД предъявляются требования по
точности и по надежности в процессе эксплуатации:
• заданная частота вращения компрессора на основных
эксплуатационных
режимах
должна
поддерживаться
с
погрешностью не более 0,3%;
• при приемистости переход с режима малого газа до
максимальных оборотов должен занимать не более 5 с.;
• перерегулирование при переходных процессах, вызванное
возмущениями, должно быть не более 2,5% от текущего значения
параметра ГТД.
4
Объект исследования – САУ подачей топлива в камеру
сгорания ГТД.
Предмет исследования – устройства выбора контуров
(селекторы, групповые регуляторы) САУ подачей топлива в
камеру сгорания ГТД.
Цель диссертационной работы заключается в разработке
групповых регуляторов контуров САУ подачей топлива в камеру
сгорания ГТД на базе нечеткой логики, обеспечивающих высокое
качество управления и гарантированную устойчивость САУ.
5
Задачи исследования
Для достижения указанной цели в рамках диссертационной работы были поставлены и
решены следующие основные задачи:
1. Проведён анализ принципов построения САУ подачей топлива в камеру сгорания ГТД с
селективным выбором контуров.
2. Разработан метод построения группового регулятора контуров САУ подачей топлива в
камеру сгорания ГТД на базе нечёткой логики.
3. Создан способ и алгоритм реализации адаптивного группового регулятора контуров
САУ подачей топлива в камеру сгорания ГТД на базе нечёткой логики.
4. Выполнено внедрение разработанных регуляторов в состав САУ подачей топлива в
камеру сгорания ГТД повышенной тяги.
6
Положение 1
Анализ принципов построения САУ подачей топлива в камеру
сгорания ГТД с селективным выбором контуров.
На рисунке приведен пример САУ с
селектором. Селектор построен на базе
экстремальной логики.
m
U min min{U1 ,U 2 ,...,U m } U1 U 2 ... U m U i
i 1
m
«E» – текущие отклонения параметров
ГТД; «ОРР» – основной регулятор режима;
«РР» – регулятор разгона; «РС» –
регулятор сброса; «О» – ограничители; ИУ
– исполнительное устройство; «GТ» –
расход топлива в камеру сгорания ГТД
U max max{U1 ,U 2 ,...,U m } U1 U 2 ... U m U i
i 1
7
Положение 1
При построении многоконтурных САУ
ГТД активно применяются принципы
построения адаптивных систем.
Одним из перспективных направлений
является создание адаптивного группового
регулятора на базе нечеткой логики.
G – задающие воздействия; УУ – основное
устройство управления; УА – устройство
адаптации; ОУ – объект управления; Y –
параметры адаптации; U – управляющие
воздействия; X – текущие значения
параметров ОУ
8
Целевая функция
Для определения оптимального варианта
управления построена следующая целевая
функция:
F A ( t1 t2 ) B (1 % 2 %) min
а
б
Рекомендуемые (отраслевые) значения весовых
коэффициентов:
A 0.6 0.7 B 0.3 0.4
в
9
Положение 2
Новый метод построения аналитической и имитационной моделей нечеткого группового
регулятора контуров САУ подачей топлива в камеру сгорания ГТД, позволяющий провести
теоретический анализ и экспериментальные исследования (п. 2)
«nв_зад», «nв_max», «nв_min», «dnв_п_зад» «dnв_с_зад» программные значения контуров управления; «Р контура
“nв”», «Р контура “nв_max”», «Р контура “nв_min”», «Р
контуров “dnв”» - регуляторы контуров управления
САУ подачей топлива в камеру сгорания ГТД с
селектором.
Контуры управления:
• 1 – контур частоты вращения вентилятора «n_в»
(основной контур режима);
• 2 – контур максимальной частоты вращения
вентилятора «n_в_max» (контур ограничения по
максимуму);
• 3 – контур минимальной частоты вращения
вентилятора «n_в_min» (контур ограничения по
минимуму);
• 4 – контур приемистости ускорения частоты
вращения вентилятора «dnв_п» (контур разгона);
• 5 – контур сброса ускорения частоты вращения
вентилятора «dnв_с» (контур сброса).
10
Положение 2
Управляющие воздействия контуров «Xnв», «Xnв_max», «Xnв_min», «Xп» и «Xс»
поступают на вход селектора.
Выбранный контур управления вступает в работу, а обратные связи остальных
контуров разрываются, что является недостатком использования экстремальной логики.
«Xnв», «Xnв_max», «Xnв_min», «Xп», «Xс» управляющие воздействия контуров управления;
«min», «max» - элементы на экстремальной логике;
«Xселектора» - выход селектора; «общий
регулятор» - ПИ-регулятор значения определенного
селектором; «Метка селектора» - устройство для
индикации работы контуров; «dGт*» управляющее воздействие на дозатор топлива в
камеру сгорания ГТД
11
Положение 2
Предлагается заменить селектор на нечеткий групповой регулятор (НГР).
Выход нечеткого регулятора формируется, учитывая оба входных значения в
том случае, когда разница между входными значениями небольшая.
Замена экстремальной логики на нечеткие регуляторы позволяет осуществлять
плавное переключение контуров управления.
«НР_min», «НР_max» нечеткие регуляторы по
минимуму и по максимуму;
«X_нгр» - выход нечеткого
группового регулятора; «Метка
НГР» - устройство для
индикации работы контуров;
12
Положение 2
Имитационная модель нечетких регуляторов
Структура нечетких регуляторов по минимуму
и по максимуму приведена на рисунке а:
а
Фаззификатор представлен на
рисунке б:
б
13
Положение 2
Аналитическая модель нечетких регуляторов
Фаззификатор состоит из 2-х терм-множеств:
0, e a;
e a
П e, a
, a e a;
2a
1, e a;
1, e a;
a e
О e, a
, a e a;
2a
0, e a,
где a – настройка НГР; e = x1 – x2.
Блок правил содержит два правила:
Для нечеткого регулятора по минимуму:
1) Если «e» (разность «x1» и «x2») положительная, то выход
равен «constant1» (т.е. «x2») (Если «e» = «П», то «x2»)
2) Если «e» отрицательная, то выход равен «constant2» (т.е.
«x1») (Если «e» = «О», то «x1»)
Для нечеткого регулятора по максимуму:
1) Если «e» = «П», то «x1»
2) Если «e» = «О», то «x2»
Дефаззификация выполняется по
методу среднего взвешенного значения:
out
П constant1+О constant2
П О
14
Положение 2
а
Результаты моделирования САУ ГТД с НГР и с
селектором в первом виде эксперимента на режиме
«форсаж» в идеальных условиях (а), с учетом
флуктуационных помех (б) и с учетом импульсных
помех (в).
в
б
15
Положение 2
На рисунках приведены сигналы контуров селектора и НГР, сформированные регуляторами
контуров; метка селектора; метка НГР; степени принадлежности НГР; управляющие
воздействия на дозатор.
а. 2
а. 3
а. 1
а. 5
а. 4
16
Положение 2
б. 2
б. 1
б. 3
17
Положение 2
в. 1
в. 2
в. 4
в. 3
в. 5
18
Положение 2
Результаты экспериментов в идеальных условиях
Нормированные результаты
19
Положение 2
Результаты экспериментов в условиях влияния фл. помех
Нормированные результаты
20
Положение 2
Результаты экспериментов в условиях влияния имп. помех
Нормированные результаты
21
Положение 2
Получены следующие результаты
коэффициентами A=0.7, B=0.3:
по
показателям
целевой
функции
с
• В идеальных условиях: Fселектор 9.501, FНГР 9.393;
• В условиях влияния слабых флуктуационных помех: Fселектор 9.709, FНГР 9.666;
• В условиях влияния импульсных помех: Fселектор 9.689, FНГР 9.681.
НГР улучшает качество управления на 1.14% по сравнению с селектором в идеальных
условиях, на 0.44% в условиях влияния слабых флуктуационных помех и на 0.09% в условиях
влияния импульсных помех.
Анализ результатов показал уменьшение времени переходного процесса, при увеличении
перерегулирования после замены селектора на НГР.
Устранение недостатка НГР, обеспечивается адаптивным нечетким групповым регулятором.
22
Положение 3
Новый способ и алгоритм реализации аналитической и имитационной моделей адаптивного
нечеткого группового регулятора контуров САУ подачей топлива в камеру сгорания ГТД,
позволяющие провести теоретический анализ и экспериментальные исследования (п. 2)
АНГР адаптируется к изменяющимся условиям эксплуатации ГТД, а именно к состояниям
приемистости и сброса.
Имитационная
модель
адаптивных
нечетких
регуляторов
23
Положение 3
Аналитическая модель адаптивных нечетких регуляторов
Фаззификатор состоит из 2-х терм-множеств:
0, e a pf ;
1, e a pf ;
e a pf
a pf e
П e, a, pf
, a pf e a pf ; О e, a
, a pf e a pf ;
2a
2a
0, e a pf .
1, e a pf ;
Блок правил содержит два правила:
Для нечеткого регулятора по минимуму:
1) Если «e» (разность «x1» и «x2») положительная, то выход
равен «constant1» (т.е. «x2») (Если «e» = «П», то «x2»)
2) Если «e» отрицательная, то выход равен «constant2» (т.е.
«x1») (Если «e» = «О», то «x1»)
Для нечеткого регулятора по максимуму:
1) Если «e» = «П», то «x1»
2) Если «e» = «О», то «x2»
где a – настройка АНГР; pf – параметр
адаптации; e = x1 – x2.
Дефаззификация выполняется по
методу среднего взвешенного значения:
out
П constant1+О constant2
П О
24
Положение 3
Описание блока адаптации к изменяющимся условиям эксплуатации ГТД
Во время работы контура приемистости терм-множества сдвигаются вправо, а во время работы контура
сброса – влево. Интегратор имеет ограничения минимального и максимального значений ±l. Сигнал сброса
формируется в момент отключения контуров приемистости и сброса. Фильтр обеспечивает плавное
перемещение терм-множеств.
в
а
б
25
Положение 3
а
Результаты моделирования САУ ГТД с АНГР и с
селектором в первом виде эксперимента на режиме
«форсаж» в идеальных условиях (а), с учетом
флуктуационных помех (б) и с учетом импульсных
помех (в).
в
б
26
Положение 3
На рисунках приведены сигналы контуров селектора и АНГР, сформированные регуляторами
контуров; метка селектора; метка АНГР; степени принадлежности АНГР; управляющие
воздействия на дозатор.
а. 2
а. 3
а. 1
а. 6
а. 4
а. 5
27
Положение 3
б. 1
б. 4
б. 2
б. 3
28
Положение 3
в. 1
в. 4
в. 2
в. 5
в. 3
в. 6
29
Положение 3
Результаты экспериментов в идеальных условиях
Нормированные результаты
30
Положение 3
Результаты экспериментов в условиях влияния фл. помех
Нормированные результаты
31
Положение 3
Результаты экспериментов в условиях влияния имп. помех
Нормированные результаты
32
Положение 3
Получены следующие результаты
коэффициентами A=0.7, B=0.3:
по
показателям
целевой
функции
с
• В идеальных условиях: Fселектор 9.784, FАНГР 9.470;
• В условиях влияния слабых флуктуационных помех: Fселектор 9.903, FАНГР 9.692;
• В условиях влияния импульсных помех: Fселектор 9.810, FАНГР 9.666.
АНГР улучшает качество управления на 3.21% по сравнению с селектором в
идеальных условиях, на 2.13% в условиях влияния слабых флуктуационных помех и
на 1.47% в условиях влияния импульсных помех.
33
Положение 3
Показатели целевой функции с коэффициентами A=0.4, B=0.6 (использовались при
оценке перспективной САУ ГТД повышенной тяги):
• В идеальных условиях: Fселектор 8.628, FАНГР 8.561;
• В условиях влияния слабых флуктуационных помех: Fселектор 8.691, FАНГР 8.686;
• В условиях влияния импульсных помех: Fселектор 7.984, FАНГР 7.905.
АНГР улучшает качество управления на 0.78% по сравнению с селектором в
идеальных условиях, на 0.06% в условиях влияния слабых флуктуационных помех и
на 0.99% в условиях влияния импульсных помех.
Анализ результатов показал уменьшение времени переходного процесса на всех
режимах при незначительном увеличении перерегулирования на режимах «форсаж»
и «крейсерский».
34
Положение 4
Результаты экспериментальных исследований и внедрения адаптивных нечетких
групповых регуляторов в составе САУ подачей топлива в камеру сгорания ГТД
повышенной тяги в нормальных и экстремальных условиях (п. 4).
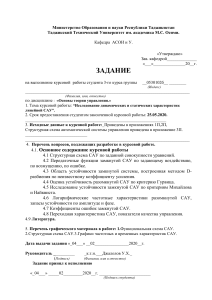
Стенд состоит из: электростартера («1»), калильной свечи («2»),
пускового клапана («3»), клапана подачи основного горючего
(«4»), топливного насоса («5»), датчика температуры газов («6»),
датчиков оборотов («7»), датчика тяги («8»), датчика расхода
(«9»), РЭД на базе NI CompactRIO («10»).
35
Внедрение результатов
диссертационного исследования
а - селектор
б - АНГР
Контуры САУ ГТД повышенной тяги:
1 – контур «n_в» (контур частоты вращения
вентилятора);
2 – контур «n_вд» (контур частоты вращения
ротора высокого давления);
17 – контур «n_в_max» (контур
максимальной частоты вращения
вентилятора);
18 – контур «n_вд_max» (контур
максимальной частоты вращения ротора
высокого давления);
8 – контур «ап» (контур приемистости
ускорения частоты вращения ротора
высокого давления);
9 – контур «ас» (контур сброса ускорения
частоты вращения ротора высокого
давления);
6 – контур «n_вд_min» (контур минимальной
частоты вращения ротора высокого
давления);
36
Внедрение результатов
диссертационного исследования
а
Результаты работы САУ ГТД повышенной тяги с
селектором на земле (H=0) в идеальных условиях (а),
с учетом флуктуационных помех (б) и с учетом
импульсных помех (в).
в
б
37
Внедрение результатов
диссертационного исследования
Результаты работы САУ ГТД повышенной тяги с
АНГР на земле (H=0).
а
в
б
38
Внедрение результатов
диссертационного исследования
Результаты работы САУ ГТД повышенной тяги с
селектором на высоте (H=11).
а
в
б
39
Внедрение результатов
диссертационного исследования
Результаты работы САУ ГТД повышенной тяги с
АНГР на высоте (H=11).
а
в
б
40
Внедрение результатов
диссертационного исследования
Результаты экспериментов в идеальных условиях
Нормированные результаты
41
Внедрение результатов
диссертационного исследования
Результаты экспериментов в условиях влияния фл. помех
Нормированные результаты
42
Внедрение результатов
диссертационного исследования
Результаты экспериментов в условиях влияния имп. помех
Нормированные результаты
43
Внедрение результатов
диссертационного исследования
Получены следующие результаты по показателям целевой функции с коэффициентами A=0.4,
B=0.6:
• В идеальных условиях: Fселектор 2.87, FАНГР 2.79;
• В условиях влияния слабых флуктуационных помех: Fселектор 2.81,
• В условиях влияния импульсных помех: Fселектор 2.86,
FАНГР 1.99;
FАНГР 2.74.
АНГР улучшает качество управления на 2.8% по сравнению с селектором в идеальных
условиях, на 29.2% в условиях влияния слабых флуктуационных помех и на 4.2% в условиях
влияния импульсных помех.
44
Основные
результаты и выводы
В ходе выполнения диссертационной работы осуществлена разработка НГР который позволяет
учитывать значения нескольких контуров при формировании управляющего воздействия и АНГР
контуров который адаптируется к изменяющимся условиям эксплуатации ГТД. Получены
следующие основные результаты:
1. Проведен анализ принципов построения САУ подачей топлива в камеру сгорания ГТД с
селективным выбором контуров.
2. Разработан метод построения новых аналитической и имитационной моделей НГР контуров САУ
подачей топлива в камеру сгорания ГТД, позволяющие провести теоретический анализ и
экспериментальные исследования. Использование НГР вместо селектора приводит к уменьшению
времени переходного процесса на всех режимах, но увеличивает перерегулирование на режимах
«форсаж» и «крейсерский».
3. Создан способ и алгоритм реализации аналитической и имитационной моделей АНГР контуров САУ
подачей топлива в камеру сгорания ГТД, позволяющие учитывать условия эксплуатации ГТД при
формировании управляющего воздействия. Использование АНГР вместо селектора позволяет
уменьшить время переходного процесса на всех режимах при незначительном увеличении
перерегулирования на режимах «форсаж» и «крейсерский».
45
Основные
результаты и выводы
4. Представлены результаты экспериментальных исследований и внедрения АНГР в состав САУ
подачей топлива в камеру сгорания ГТД повышенной тяги в идеальных условиях (улучшение качества
управления на 2.8% по сравнению с селектором), в условиях влияния слабых флуктуационных помех
(улучшение качества управления на 29.2%) и в условиях влияния импульсных помех (улучшение
качества управления на 4.2%).
5. Намечены направления дальнейших исследованиях по развитию проблем многоконтурных САУ, в
том числе представляется целесообразным расширить исследование в области группового управления
контурами САУ ГТД. Рассмотреть проблему адаптивного нечеткого управления ГТД с
малоэмиссионными камерами сгорания
46
Личный вклад автора
1. Разработка моделей нечеткого группового регулятора контуров для САУ подачей топлива в
камеру сгорания ГТД;
2. Разработка моделей адаптивного нечеткого группового регулятора контуров для САУ
подачей топлива в камеру сгорания ГТД;
3. Создание имитационной модели САУ подачей топлива в камеру сгорания ГТД с различными
типами регуляторов (селектор, нечеткий групповой регулятор, адаптивный нечеткий групповой
регулятор) в инженерном математическом комплексе MATLAB Simulink;
4. Проведение имитационного моделирования, обработка и сопоставление полученных
результатов;
5. Участие во внедрении разработанного адаптивного нечёткого группового регулятора в
составе САУ подачей топлива в камеру сгорания ГТД повышенной тяги, что привело к улучшению
основных показателей качества управления по целевой функции на 2.8% в идеальных условиях,
на 29,2% в условиях флуктуационных помех и на 4,2% в условиях импульсных помех.
47
Апробация результатов
Основные результаты работы обсуждались на «XIII Всероссийском
совещании по проблемам управления (ВСПУ-2019)», г. Москва, 2019;
международных научно-технических конференциях «Искусственный
интеллект в решении актуальных социальных и экономических проблем
ХХI века», г. Пермь, 2020 и 2021; «Математическое моделирование», г.
Москва, 2021; «2021 Conference of Russian Young Researchers in Electrical
and Electronic Engineering» и «2022 Conference of Russian Young
Researchers in Electrical and Electronic Engineering», г. Санкт-Петербург,
2021 и 2022; а также на семинарах ПНИПУ.
48
Публикации
По материалам диссертации опубликовано 12 работ, из них 4 статьи, индексированных в
международной базе цитирования Scopus. 3 статьи, индексированных в журналах из списка ВАК.
4 статьи – в материалах других изданий. 1 свидетельство о гос. регистрации программы для ЭВМ.
Публикации в журналах, индексируемых в международной базе SCOPUS:
1. Сторожев, С.А. Нейронечеткое управление выбросами вредных веществ авиационного
газотурбинного двигателя / С.А. Сторожев, А.А. Южаков, Ю.Н. Хижняков [и др.] // Мехатроника,
автоматизация, управление. – 2020. - Т. 21. - № 6. – С. 348-355.
2. Сторожев, С.А. Селективное управление газотурбинным двигателем / С.А. Сторожев, А.А.
Южаков, Ю.Н. Хижняков, В.С. Никулин // Электротехника. – 2020. - № 11. – С. 18-21.
3. Storozhev, S. Gas Turbine Engine Combustion Chamber Pollutant Meter Using Neural Technology / S.
Storozhev, Yu. Khizhnyakov, V. Nikulin // Proceedings of the 2021 IEEE Conference of Russian Young
Researchers in Electrical and Electronic Engineering (ElConRus), 26-29 Jan., 2021. P. 934-936.
4. Storozhev, S. Fuzzy Adaptive Control of a Stochastic Non-deterministic Object / S. Storozhev, A.
Yuzhakov, Yu. Khizhnyakov, V. Nikulin // Proceedings of the 2022 IEEE Conference of Russian Young
Researchers in Electrical and Electronic Engineering (ElConRus), 25-28 Jan., 2022. P. 675-679.
49
Публикации
Публикации в рецензируемых журналах ВАК:
5. Сторожев, С.А. Адаптивный виртуальный измеритель вредных веществ в камере сгорания ГТД
с применением нечеткой технологии / С.А. Сторожев, Д.М. Абдуллин, Ю.Н. Хижняков, В.С.
Никулин // Труды МАИ. – 2021. - № 116. – URL: https://trudymai.ru/published.php?ID=121086.
6. Сторожев, С.А. Новый метод адаптации регулятора состояний с применением нечеткой логики /
С.А. Сторожев, Ю.Н. Хижняков// Труды МАИ. – 2021. - № 118. – URL:
https://trudymai.ru/published.php?ID=158255.
7. Сторожев, С.А. Виртуальный адаптивный векторно-матричный измеритель окислителя камеры
сгорания газотурбинного двигателя / С.А. Сторожев, Ю.Н. Хижняков, В.С. Никулин // Труды
МАИ. – 2021. - № 121. – URL: https://trudymai.ru/published.php?ID=162668.
50
Публикации
Публикации в других изданиях:
8. Сторожев, С.А. Методика проектирования нейронного ПИД-регулятора для управления оборотами
газотурбинного двигателя на различных режимах полета / С.А. Сторожев, Ю.Н. Хижняков, В.С.
Никулин, Д.М. Абдуллин // XLVI Международная молодёжная научная конференция "Гагаринские
чтения – 2020", М. - С. 275-276.
9. Сторожев, С.А. Метод переключения регуляторов контуров САУ ГТД / С.А. Сторожев, А.А. Южаков //
II Международная конференция "Математическое моделирование", 21-22 июля 2021 г., М. - С. 117-118.
10. Сторожев, С.А. Нечеткий регулятор состояний / С.А. Сторожев, А.А. Южаков, Ю.Н. Хижняков, В.С.
Никулин // Международная конференция "Интеллектуальные системы в науке и технике", 12-18 октября
2020 г., Пермь. - С. 240-246.
11. Сторожев, С.А. Адаптивное двухстороннее мультиагентное управление газотурбинного двигателя /
С.А. Сторожев, А.А. Южаков, Ю.Н. Хижняков, В.С. Никулин // Международная конференция
"Интеллектуальные системы в науке и технике", 12-18 октября 2020 г., Пермь. - С. 233-240.
12. Групповой регулятор на базе нечеткой логики: свидетельство о гос. регистрации программы для ЭВМ
№ 2022617353, РФ / С.А. Сторожев, А.А. Южаков, Ю.Н. Хижняков, В.С. Никулин. Опубл. 20.04.2022 г.
51
Публикации
52
Акты внедрения
53
Акты внедрения
54
Акты внедрения
55
Акты внедрения
56
Спасибо за внимание!
Двигатель состоит из входного устройства 1, вентилятора 2, компрессора 3,
внешнего контура 4, основной камеры сгорания 5 и форсажной камеры сгорания 10,
турбины компрессора 6 и турбины вентилятора 7 с выходным устройством турбин 8,
выходного вентилятора 9 и регулируемого выходного сопла 11.
Учитывая только инерции вращающихся масс роторов получим систему уравнений:
n k n k n k G ;
ВВ В
ВК К
ВG Т
В
nК k КВ nВ k КК nК k КGGТ ;
ТТ kТВ nВ kТК nК kТGGТ ,
В уравнении регулируемыми являются три параметра (три выходных переменных):
частота вращения ротора вентилятора «nв», частота вращения ротора компрессора
«nк» и температура газа за турбиной «TТ». Управляющим параметром (управляющим
воздействием) является расход топлива в основной камере сгорания GТ.
Динамическая
модель
исполнительного устройства:
TЗТ zТ zТ kZT iТ ;
TИТ GТФОР zТ ;
1 p
G
e
GТФОР ,
Т
Исследование проводилось на трех режимах работы ГТД: «форсаж», «крейсерский
режим», «режим малого газа».
На режиме «форсаж»: 1 относительная единица оборотов вентилятора «n_в» равняется
13943 оборотов в миниту. На «крейсерском режиме»: 1 отн. ед. «n_в» = 10674 об/мин. На
«режиме малого газа»: 1 отн. ед. «n_в» = 4830 об/мин .
Программы ограничений «nв_max» и «nв_min» для всех режимов («форсаж»,
«крейсерский режим», «режим малого газа») заданы на уровнях 1.5 и 0.05,
соответственно. Программа приемистости «dnв_п_зад» для режимов «форсаж» и
«крейсерский» равна 0.1, а для режима «малый газ» равна 0.07, программа сброса для
режимов «форсаж» и «крейсерский» равна -0.1, а для режима «малый газ» равна -0.07.
%
0, e a;
e a
П e, a
, a e a;
2
a
1, e a;
hmaх hуст
dh
1, e a;
a e
О e, a
, a e a;
2
a
0, e a.
0, e a pf ;
e a pf
П e, a, pf
, a pf e a pf ;
2a
1, e a pf ;
1, e a pf ;
a pf e
О e, a
, a pf e a pf ;
2
a
0, e a pf .