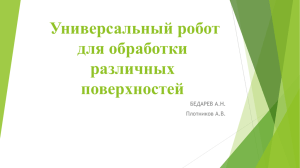
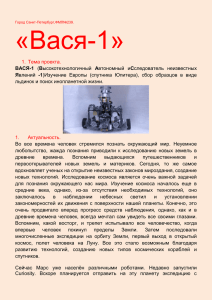
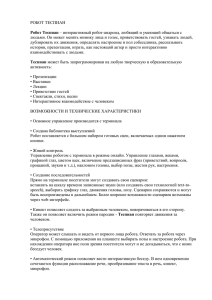
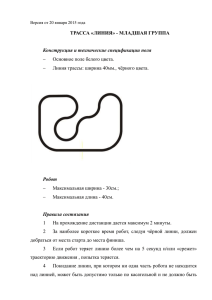
KUKA 6.2 Крепление к станине машины Описание Узел Крепление к станине машины" применяется в случаях, когда робот крепится на стальной конструкции, монтажной станине (консоли) или на линейном блоке KUKA. Если робот устанавливается в подвешенном виде, т. е. на потолке, этот узел также используется. Опорная конструкция должна быть надежной, чтобы выдерживать возникающие усилия (нагрузки на фундамент). На нижеследующем рисунке приведены все необходимые для создания поверхности контакта сведения, которым нужно следовать неукоснительно (»> Рис. 6-4 ). В крепление к станине машины входят: ■ болты с крепежными деталями » винты с шестигранной головкой с зажимными шайбами Рис. 6-4: Крепление к станине машины 1 2 Чертеж с размерами Болт Винт с шестигранной головкой На следующем рисунке показаны все сведения для крепления к станине машины, а также необходимые характеристики фундамента. Malle / Dimensions: mm Рис. 6-5: Крепление к станине машины, чертеж с размерами 1 Поверхность контакта 3 Винт с шестигранной головкой, 8х 4 Стальная конструкция 2 Болт 6.3 Соединительные кабели и интерфейсы Соединительные кабели К соединительным кабелям относятся все кабели для передачи энергии и сигналов между роботом и системой управления роботом. Они подклю чаются со стороны робота к коробкам выводов с помощью штекеров. Набор соединительных кабелей включает в себя: ■ Кабель двигателя, Х20 - ХЗО ■ Кабель обмена данными, Х21 - Х31 ■ Защитный кабель (опция) В зависимости от оснащения робота можно использовать различные соединительные кабели. Доступны соединительные кабели длиной 7 м, 15 м 25 м 35 м и 50 м. Не разрешается превышать максимальную длину соединительных кабелей в 50 м. Если робот эксплуатируется с линейным блоком, оснащенным собственной кабелеукладочной цепью, эти кабели также следует учитывать. Для соединительных кабелей всегда требуется дополнительный защитный проводник для создания низкоомного соединения согласно DIN EN 60204 между роботом и шкафом управления. Соединение выполняется 6 Проектирование, ключения'зашитн^г кабельных наконечников. Болты с резьбой для подключения защитного проводника находятся на станине робота. лУю| иирКпХэ0ВаНИИ И пРоклаДКе соединительных кабелей соблюдать еле- дующие правила: ■ соблюдать минимальный радиус изгиба 150 мм для неподвижной прокладки кабеля двигателя и 60 мм для кабеля обмена данными. не допускать механических воздействий на кабели; прокладывать кабели без напряжения и без натяжения в области штекеров; ■ ■ ■ ■ прокладывать кабели только во внутреннем пространстве; соблюдать температурный диапазон (для неподвижной прокладки) от -10 °C (263 К) до +70 °C (343 К); я прокладывать кабели двигателя и обмена данными отдельно друг от друга в каналах из листовой стали; при необходимости принять дополнительные меры по электромагнитной совместимости. Интерфейс системы энергоснабжения Робот можно оснастить первой системой электропитания от оси 1 до оси 3 и второй системой электропитания от оси 3 до оси 6. Требуемый для этого интерфейс А1 находится на задней стороне станины, интерфейс АЗ — сбоку на манипуляторе, а интерфейс для оси 6 - на инструменте робота. В зависимости от области применения эти интерфейсы могут различаться в вариантах исполнения и количестве. Например, они могут быть оснащены подключениями для шлангопроводов и электрокабелей. Дополнительная информация о расположении разъемов и соединительной резьбе приведена в соответствующей документации на эти элементы. Рис. 6-6: Интерфейсы на роботе 1 Подключение кабеля двига- 2 Интерфейс оси 1, станина 3 Подключение кабеля обмена теля ХЗО данными, Х31 4 5 Интерфейс оси 3, манипуля тор Интерфейс оси 6, инструмент KUKA KUKA Транспортировка 7.1 Транспортировка механических частей робота вочное положение ТранспортиРовкой перевести робот в транспортире-^ чивость Пока ооб трансп°РтиР°вке необходимо обеспечить устой- транспортировочн™НпеппаКРеПЛеН На П0Лу 0Н должен ' находиться в ся, что робот нигде оложении- ПеРед подъемом робота удостоверить- тировочные rtwr закРеплен. Предварительно удалить все транспорразъелинит? 0РЫ1 ТЭКИе как гвозди и ви”ты- Предварительно разъединить заржавевшие и склеенные контакты. впиРепДДРаНСП°РТИр0ВК0й необходимо перевести робот в транспортиро- оси ппк °Ложение (>>:> Рис- 121 ). В транспортировочном положении ОСИ робота находятся в следующих Транспортироположениях: вочное положение Ось Iранспортировочное положение Транспортные габариты А1 А2 АЗ А4 А5 А6 0° -140° +150° 0° -120° 0° Транспортные габариты (»> Рис. 7-2 ) робота указаны на следующем рисунке. Положение центра тяжести и вес робота изменяются в зависимости от оснастки робота и положения осей 2 и 3. Указанные габариты относятся к роботу без оснастки. Рис. 7-2: Транспортные габариты QUANT EC extra 1 Центр тяжести 2 Приемные карманы для вилочного погрузчика Транспортные габариты и центры тяжести Г — ---------------------- ^0D0T с радиусом— Действия Рэклл --- ------------------ ---РЭ7ЛЛ~ ' —“— ------- ---( ии iXzyUO Транспортировка Ко 100 D Е F 35 58 990 1625 35 39 990 1625 38 40 87 41 1143 1143 1754 1754 А В С 1576 759 1740 760 1740 1937 803 798 Робот можно перевозить с помощью вилочного погрузчика или р собления для транспортировки тросового типа. IА ОСТОРОЖНО I Неподходящее транспортное ^®^В°л“°равм | А ОСТОРОЖНО, стать причиной повреждения робота или Р с персонала. Использовать только допустимые транспор только Пока- достаточной грузоподъемностью. Транспортировать ро занным способом. Транспортировка с помощью вилочного погрузчика Для транспортировки с помощью вилочного погрузчика (>» Рис. 7- ) в станине находятся два кармана для вилочного погрузчика. Робот можно поднять на вилочном погрузчике спереди или сзади. При введении вил в карманы для вилочного погрузчика не допустить повреждения станины. Вилочный погрузчик должен иметь минимальную грузоподъемность , т и соответствующий вылет вил. Транспортировку потолочных роботов можно выполнять только посредством вилочного погрузчика. В случае, когда установочное положение робота не позволяет захватить робот за приемные карманы, можно воспользоваться вспомогательным подъемным оборудованием. Благодаря данному оборудованию сохраняется возможность транспортировки робота посредством вилочного погрузчика. Следует избегать чрезмерной нагрузки карманов УВЕДОМЛЕНИЕ для вилочного погрузчика при совместном или поочередном перемещении регулируемых гидравликой вилок погрузчика. Рис. 7-3: Транспортировка при помощи вилочного погрузчика 7 Транспортировка Транспорт ровка при помощи приспособления для транспортировки тросового типа Робота также можно транспортировать при помощи приспосо л транспортировки тросового типа (>» Рис. 7-4 ). Для этого он до ходиться в транспортировочном положении. Приспособление для р портировки тросового типа подвешивается в 3 точках с помощью ры болтов М16 DIN 580. Все тросы должны иметь достаточную длину, их следует провести таким образом, чтобы не повредить робот. Из-за уста новленных инструментов и деталей оснастки может возникнуть не лаго- приятное смещение центра тяжести. IА ОСТОРОЖНОЙ Робот может опрокинуться при транспортировке. *Опасность нанесения травм и материального ущерба. Учитывать возможность опрокидывания робота при транспортировке с I помощью приспособления для транспортировки тросового типа. Принять дополнительные меры безопасности. Любой другой захват робота с помощью крана запрещен! 1 Транспортировочное приспособление тросового типа 3 Карусель 4 Кран Рис. 7-4: Транспортировка при помощи приспособления для транспортировки тросового типа 2 Рым-болт М16 KUKA J Первый и повторный ппо^взнспп^атацин^ KUKA Первый и повторный ввод в эксплуатацию Монтаж крепления к фундаменту Описание Эта инструкция действительна для варианта "Крепление к фундаменту с центрированием. Робот крепится на соответствующем бетонном фундаменте с помощью 4 опорных плит и армополимерных анкеров. Если поверхность бетонного фундамента недостаточно гладкая и ровная, необходимо устранить несоответствия с помощью подходящей выравнивающей массы. При использовании динамического набора и армополимерных анкеров применять только детали и патроны со связующим составом одного производителя. Для создания отверстий для анкеров нельзя применять алмазные инструменты или сверла для отверстия под резьбу; предпочтительно применять сверлильные инструменты компании-изготовителя анкеров. Дополнительно следует соблюдать указания изготовителя по использованию армополимерных анкеров. Необходимые условия ■ Бетонный фундамент должен иметь требуемые размеры и поперечные сечения. ■ Поверхность фундамента должна быть гладкой и ровной. ■ Узел "Крепление к фундаменту" должен иметься в полной комплектации. ■ Специальные инструменты Порядок действий Приготовить выравнивающую массу. Требуются следующие специальные инструменты: ■ сверлильная машина со сверлом о 18 мм; ■ посадочный инструмент по указанию производителя анкеров. 1. Поднять робот при помощи вилочного погрузчика или приспособления для транспортировки тросового типа. 2. Закрепить на роботе каждую из 4 опорных плит при помощи двух винтов с шестигранной головкой М24х65-8.8-А2К вместе с предохранительными шайбами; МА = 640 Нм. 2 опорные плиты оснащены болтами для центрирования. 3. Определить положение робота в рабочей зоне на фундаменте. 4. Поставить робот в монтажном положении на фундамент. 5. Выровнять робот по горизонтали. Для этого в каждой опорной плите имеется резьба М20. УВЕДОМЛЕНИЕ Если опорные плиты не прилегают к бетонному фундаменту полностью, может возникнуть напряжение или ослабление фундамента. Заполнить зазор выравнивающей массой. Для этого повторно поднять робот и обильно нанести выравнивающую массу на опорные плиты снизу. После этого уложить и выровнять робот, удалить лишнюю выравнивающую массу. Оставить затвердевать выравнивающую массу приблизительно на 3 часа. Время затвердевания увеличивается при температурах ниже +20 °C (293 К). 6. Только при использовании выравнивающей массы: Оставить затвердевать выравнивающую массу приблизительно на 3 часа. Время затвердевания увеличивается при температурах ниже +20 °C (293 К). 7. Просверлить 12 отверстий (»> Рис. 8-1 ) (5) для анкеров через отверстия опорных плит в фундаменте. 04.12.2012 Версия: BA KR QUANTEC extra V4 ru (PDF; 127/269 кикд КК pc AN I I С extra 8. Очистить отверстия для анкеров. 9. Вставить 12 патронов со связующим составом. 10. Зажать посадочный инструмент со штоком фундаментного болта в сверлильной машине и вставить шток в отверстие под анкер при ма симальной частоте вращения 750'1 об./мин. Шток фундаментного болта посажен, если связующий состав полностью перемешан, а от верстие под анкер в фундаменте полностью заполнено. 11. Выполнить следующие рабочие шаги для всех фундаментных болтов. 12. Оставить затвердевать связующий состав. См. таблицу или указания Размеры / Dimensions: mm Рис. 8-1: Монтаж армополимерных анкеров 1 Сверлильная машина 2 Посадочный инструмент 3 Шток фундаментного болта 4 Патрон со связующим составом Отверстие для анкера 5 6 7 8 9 Контргайка Шестигранная гайка Сферическая шайба Наполнительная шайба производителя. Эти значения являются ориентировочными. Температура Время £293 К (+20 °C) 20 минут £283 К (+10 °C) 30 минут £273 К (0 °C) 1 час 13. Уложить наполнительную шайбу и сферическую шайбу. 14. Установить шестигранные гайки и затянуть их динамометрическим ключом крест-накрест; при этом в несколько этапов увеличить момент затяжки до значения 90 Нм. 15. Насадить и затянуть контргайку. 16. Впрыснуть связующий состав в отверстие на наполнительной шайбе, пока это пространство не будет полностью заполнено. Учесть и соблюсти время затвердевания. Теперь фундамент и робот подготовлены для подсоединения робота 128/269 £[Ш£^0£122012_Версия: BA KR QUANTE^xtrs^^iHPDF) KUKA Монтаж крепления к станине машины НИе Крепление к станине машины служит для монтажа роботов на подготов ленной заказчиком стальной конструкции или на каретке линейного блока. Необходимые условия ■ ■ ■ Монтажная поверхность подготовлена согласно рисунку (»> Рис. 6 5). Опорная конструкция проверена на достаточную надежность. Узел крепления к станине машины полностью в наличии. Порядок действий 1. Очистить поверхность контакта (»> Рис. 8-2 ) робота. 2. Проверить расположение отверстий. 3. Вставить 2 болта и 2 винта с внутренним шестигранником М8х55 8.8 вместе с зажимными шайбами и затянуть динамометрическим клю чом; МА = 23,9 Нм. 4. Подготовить 8 винтов с шестигранной головкой М24х65-8.8-А2К с за жимными шайбами. Рис. 8-2: Монтаж крепления к станине машины 1 Болт 3 Винт с шестигранной голо вкой с зажимной шайбой, 8х 2 Винт с внутренним шестигранником с зажимной шайбой, 2х 4 Поверхность контакта Теперь фундамент подготовлен для монтажа робота. 8.3 Монтаж робота Описание Это описание действительно для монтажа роботов для напольного крепления с вариантами крепления к фундаменту, станине машины и пластинам адаптера. Монтаж и ввод в эксплуатацию системы управления робота, установленных инструментов и приложений здесь не описывается. Условие ■ Установлено соответствующее крепление к фундаменту. ■ Место монтажа доступно для крана или вилочного погрузчика. ■ Инструменты и прочие части установки, которые препятствуют работам, сняты. ■ Робот находится в транспортировочном положении. Статус: 04.12.2012 Версия: BA KR QUANTEC extra V4 ru (PDF) 129/269 2МЕС extra ■ Соединительные и защитные кабели проложены к роботу и устано лены. ■ Снабжение сжатым воздухом подведено к роботу; только вариант F. Порядок действий 1. Проверить оба болта (»> Рис. 8-3 ) (4) на отсутствие повреждений и прочность посадки. 2. Перевезти робот с помощью крана или вилочного погрузчика на место установки. Приспособление для транспортировки тросового типа не должно повредить робот. 3. Очистить поверхность контакта на роботе. 4. Поставить робот вертикально на фундамент. Во избежание повреждения болтов необходимо обеспечить точное вертикальное положение. 5. Вставить 8 винтов с шестигранной головкой М24х65-8.8 вместе с зажимными шайбами. 6. Затянуть винты с шестигранной головкой динамометрическим ключом. В несколько этапов увеличить момент затяжки до значения 640 Нм. 7. Снять приспособление для транспортировки тросового типа, рым- болт или карманы для вилочного погрузчика. 8. Подключить кабель двигателя ХЗО и кабель обмена данными Х31. 9. Подключить защитный кабель «система управления роботом - робот» к подключению защитного кабеля. 10. Подключить защитный кабель «часть установки - робот» к подключению защитного кабеля. 11. Проверить выравнивание потенциалов согласно стандартам VDE 0100 и EN 30204-1. Дополнительные сведения приведены в инструкции по монтажу или по эксплуатации системы управления роботом. 12. Подключить снабжение сжатым воздухом к регулятору давления и установить регулятор давления на значение «ноль»; только для варианта F. 13. Открыть снабжение сжатым воздухом и установить регулятор давления на 0,01 мПа (0,1 бар); только вариант F. 14. При необходимости установить инструменты. 15. После 100 часов работы подтянуть 8 винтов с шестигранной головкой с помощью динамометрического ключа. 8 Первый и поато] KUKA Рис. 8-3: Монтаж робота 1 Карусель 2 Винты с шестигранной головкой 3 Зажимные шайбы 6 Кабель двигателя 7 8 Подключение защитного кабеля Подключение защитного кабеля, система управления роботом 4 Болт 5 Кабель обмена данными Ввести в эксплуатацию робот согласно инструкции по эксплуатации и программированию системного программного обеспечения компании KUKA, а также инструкции по монтажу и эксплуатации системы управления роботом, глава «Ввод в эксплуатацию». Из-за неверно установленного или отсутствующего УВЕДОМЛЕНИЕ регулятора давления можно повредить ро бот. Поэтому робот должен эксплуатироваться только с верно установленным регулятором давления и подключенной подачей сжатого воздуха. 8.4 Монтаж потолочного робота Это описание действительно для монтажа роботов для потолочного Описание крепления с вариантами крепления к станине машины и пластинам адаптера. Для монтажа на потолке транспортировку робота - уже в правильном монтажном положении - можно осуществить на стойке для транспортировки. С этой стойки он снимается при помощи вилочного погрузчика и отвозится к месту монтажа. Монтаж и ввод в эксплуатацию системы управления робота, установленных инструментов и приложений здесь не описывается. Условие ■ Установлено крепление к станине машины. ■ Место монтажа доступно для вилочного погрузчика. ■ Инструменты и прочие части установки, которые препятствуют работам, сняты. ■ Робот находится в транспортировочном положении и в положении для потолочного монтажа. ■ Соединительные и защитные кабели проложены к роботу и установлены. Статус: 04.12.2012 Веосия: BA KR QUANTEC extra V4 ru (PDF) Снабжение сжатым воздухом подведено к роботу; только вариант F. Порядок действий 1. Проверить оба болта (>» Рис. 8-4 ) (1) на отсутствие повреждений и прочность посадки. 2. Очистить поверхность прилегания на роботе и портале. 3. Перевезти робот с помощью вилочного погрузчика на место установки. 4. Вертикально поднять робот вилочным погрузчиком и установить на потолке. Во избежание повреждения болтов необходимо обеспечить точное вертикальное положение. 5. Вставить 4 винтов с шестигранной головкой М24х65-8.8 вместе с зажимными шайбами. Прижимать робот к потолку до тех пор, пока все винты с шестигранной головкой не будут вставлены и затянуты динамометрическим ключом. 4 из 8 крепежных винтов недоступны с вилочным погрузчиком. 6. Затянуть винты с шестигранной головкой динамометрическим ключом. В несколько этапов увеличить момент затяжки до значения 640 Нм. 7. Удалить вилочный погрузчик. 8. Вставить 4 винтов с шестигранной головкой М24х65-8.8 вместе с зажимными шайбами. 9. Затянуть 4 винта с шестигранной головкой (6) динамометрическим ключом. В несколько этапов увеличить момент затяжки до значения 640 Нм. 10. Подключить кабель двигателя ХЗО (3) и кабель обмена данными Х31. 11. Подключить защитный кабель «система управления роботом - робот» к подключению защитного кабеля. 12. Подключить защитный кабель «часть установки - робот» к подключению защитного кабеля. 13. Проверить выравнивание потенциалов согласно стандартам VDE 0100 и EN 302041. Дополнительные сведения приведены в инструкции по монтажу или по эксплуатации системы управления роботом. 14. Подключить снабжение сжатым воздухом к регулятору давления и установить регулятор давления на значение «ноль»; только для варианта F. 15. Открыть снабжение сжатым воздухом и установить регулятор давления на 0,01 мПа (0,1 бар); только вариант F. 16. При необходимости установить инструменты. 17. После 100 часов работы подтянуть винты с шестигранной головкой с помощью динамометрического ключа.