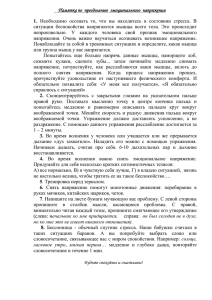
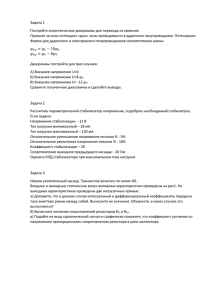
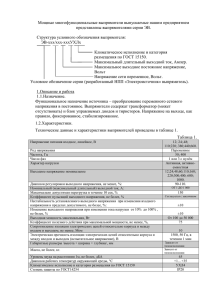
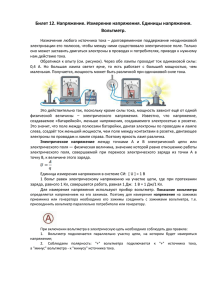
ВВЕДЕНИЕ В настоящий момент, во время интенсивного роста научно-технического прогресса основное внимание должно уделяться обеспечению устойчивого развития технического образования. Необходимо обеспечить переход к эффективным образовательным технологиям за счёт смены парадигмы, включенность обучаемых в реальную исследовательскую и производственную деятельность, а также, приобретение востребованных рынком профессиональных компетенций в условиях реального производства, знании товаров и услуг. Использование обучающего оборудования в процессе обучения даёт возможность студентам и учащимся на практике закрепить и проверить полученные знания. Лабораторные стенды дают возможность студентам прибрести практические навыки и придают процессу обучения особый интерес. Надежная работа электронной техники может быть обеспечена только качеством элементной базы, заложенной при ее проектировании, а также физическим исполнением этой элементной базы. Иными словами, чем меньше номенклатура и количество элементов в составе электронного устройства, тем надежнее его работа. Кроме того, немаловажным для обеспечения надежности является замена дискретных элементов на узлы, выполненные в интегральном (или хотя бы гибридном) исполнении. К сожалению, узлы силовой преобразовательной техники в большинстве случаев слабо интегрируются, что ведет к дополнительным сложностям при ее разработке, производстве и эксплуатации. Однако и в этой области наметились существенные сдвиги, впрочем, в основном касающиеся схем управления. Разработаны и применяются специализированные интегрированные микроконтроллеры, формирующие управляющие последовательности, осуществляющие плавный пуск, стабилизацию, различные виды защит. Однако следует признать, что элементы силовой части преобразовательной техники по настоящее время разрабатываются на основе дискретной базы, поэтому в конечном итоге качество функционирования разработки зависит не только от качества элементной базы, но также и от того, насколько квалифицированно разработчик соединит эти элементы, насколько полно он учтет влияние паразитных параметров. Достаточно продолжительное время разработчики были вынуждены проектировать схемы драйверов управления на дискретных элементах. Эти схемы, в зависимости от квалификации и опыта разработчиков, получались более или менее удачными, но, скорее, все-таки «менее». Первым важным событием на пути интеграции драйверов управления стало появление микросхем серий IR21xx и IR22xx, разработанных фирмой «International Rectifier». Эти микросхемы сегодня нашли широчайшее применение в маломощной преобразовательной технике, поскольку отвечают всем вышеназванным требованиям. Редкий опытный разработчик силовой преобразовательной техники не имеет опыта применения данных микросхем – настолько они популярны. Проектируя схему управления силовыми транзисторными сборками, опытный разработчик отлично знает, что: необходимо обеспечивать «плавающий» потенциал управления «верхним» силовым ключом в полу мостовой схеме; крайне важно создать быстрое нарастание и спад управляющих сиг- налов, поступающих на затворы силовых элементов для снижения тепловых потерь на переключение; необходимо обеспечить высокую величину импульса тока управле- ния затворов силовых элементов, для быстрого перезаряда входных (затворных) емкостей; в подавляющем большинстве случаев нужна электрическая совме- стимость входной части драйвера со стандартными цифровыми сигналами ТТЛ/КМОП (как правило, поступающих от микроконтроллеров). В полу мостовых и мостовых преобразовательных схемах необходимо также принимать специальные меры по предотвращению возникновения «сквозных» токов вследствие одновременного открытия транзисторов «верхнего» и «нижнего» плеча. Эта функция в составе интегральных драйверов легко реализуема, причем величину «мертвого времени» можно регулировать с помощью внешних элементов (резисторов или конденсаторов). Актуальность темы обусловлена: применением частотно-регулируемого электропривода во всех отрас- лях промышленности; развитием полупроводниковой преобразовательной техники; развитием элементной базы силовой электроники; потребностью в высококвалифицированном техническом персонале; необходимостью применения учебной техники в процессе подго- товки студентов. Объектом исследования является «Лабораторный стенд для исследования импульсов управления частотным преобразователем». Предметом исследования является двухзвенный преобразователь частоты с автономным инвертором и широтно-импульсной модуляцией. Цель работы – выполнить разработку лабораторного стенда для исследования импульсов управления частотного преобразователя. Для реализации этой цели необходимо решить следующие задачи: провести обзор элементной базы и схемотехнических решений; разработать силовой блок преобразователя; разработать блок управления; произвести монтаж и отладку преобразователя частоты; изготовить лабораторный стенд на базе сконструированного устрой- произвести исследование управляющих импульсов для выходных ства; ключей преобразователя частоты. 1 ОБЩИЕ СВЕДЕНИЯ О ЧАСТОТНОМ РЕГУЛИРОВАНИИ 1.1 Способы частотного управления Различают скалярное управление, векторное управление по потокосцеплению ротора и прямое управление моментом. Скалярное управление реализуется во всех современных преобразователях как базовая структура системы управления. При скалярном управлении на двигатель подается напряжение заданной частоты, при этом преобразователь не регулирует значения токов фаз или момент двигателя в динамике. Существуют скалярные системы управления, которые имеют положительную связь по току фазы (с компенсацией скольжения) или замкнутые по скорости, что в статике при плавном изменении момента нагрузки позволяет получать характеристики, подобные имеющимся у систем векторного управления асинхронным двигателем. В системе векторного управления вычисляется положение потокосцепления ротора двигателя и контролирует в статоре две составляющих тока: одну для поддержания потокосцепления ротора, а другую для создания момента. В этом режиме асинхронный электродвигатель становится похож на машину постоянного тока, для которого можно, применяя методы последовательной коррекции и подчиненного регулирования, создать контур момента и контур скорости. Существуют датчиковые и бездатчиковые системы векторного управления. Вычисление положения потокосцепления ротора системой управления проще, когда известна скорость или угловое положение ротора, но его можно вычислить и ограничившись показаниями датчиков токов фаз и фазных напряжений (так работают бездатчиковые системы). Однако при существенном снижении частоты уменьшается фазное напряжение и ЭДС двигателя, при частоте ниже 5 Гц система управления уже не может вычислить все необходимые ей параметры. 1.2 Устройство преобразователей частоты Преобразователь частоты (ПЧ) для асинхронного двигателя представляет собой устройство, преобразующее сетевое переменное (одно или трёхфазное) напряжение промышленной частоты, в регулируемое по величине переменное напряжение с регулируемой частотой и числом фаз, а также углом сдвига между ними. Достоинства двухзвенных ПЧ со звеном постоянного тока: 1. Возможность получения на выходе ПЧ широкого диапазона частот, не зависимого от частоты питающей сети и полностью покрывающего потребности приводов различного назначения, в том числе высокоскоростных, среднескоростных и тихоходных, прецизионных приводов с широким и сверх широким диапазоном регулирования скорости. 2. Возможность использования относительно простых силовых схем и систем управления ПЧ для приводов с невысокими требованиями в части диапазона регулирования, быстродействия и других показателей. 3. Возможность наращивания сложности силовой части и системы управления ПЧ соразмерно уровню повышения требований к приводу без чрезмерной избыточности системы. 4. Возможность реализации в сравнительно мало элементной структуре ПЧ разнообразных алгоритмов управления, удовлетворяющих требованиям, предъявляемым к ЭП различного назначения. 5. Легкость трансформации ПЧ для работы в установках с питанием электрооборудования от автономных источников либо локальной сети постоянного тока. Основные недостатки двухзвенных ПЧ со звеном постоянного тока: 1. Двукратное преобразование энергии, что увеличивает потери энергии, ухудшает массогабаритные показатели преобразователя. 2. Наличие в звене постоянного тока силового фильтра, содержащего батарею конденсаторов значительной емкости (в схемах с автономным инвертором напряжения). На сегодняшний день наиболее используемым является двухзвенный преобразователь частоты с автономным инвертором напряжения и промежуточным звеном постоянного тока (см. рисунок 1). Рисунок 1 — Двухзвенная схема преобразования В качестве звена постоянного тока выступает выпрямитель, выполненный на силовых полупроводниковых диодах, включенных по мостовой схеме, а также емкостный фильтр, предназначенный для сглаживания пульсаций выпрямленного напряжения. Трехфазный инвертор представляет собой шесть силовых полупроводниковых ключей, образующих три полу мостовые пары, подключенные к источнику постоянного напряжения. В результате образуются три полумоста, каждый из которых формирует питающее напряжение для обмоток двигателя. Мостовое соединение ключей позволяет получать двух полярное напряжение на обмотке двигателя при однополярном источнике питания. Индуктивный характер нагрузки учитывается подключением к основным ключам встречно-параллельных диодов, обеспечивающих непрерывность протекания тока в обмотке при отключении ее от источника и возврат запасенной магнитной энергии в конденсатор фильтра. Так как входной выпрямитель не проводит ток в обратном направлении для двигателей с высокой интенсивностью тормозных режимов, предусмотрена специальная схема рассеивания рекуперированной электрической энергии (цепь «слива»). Над сетевым напряжением осуществляется двойное преобразование. В выпрямителе сетевое напряжение выпрямляется и сглаживается с помощью фильтра. Фильтр так же выполняет функцию накопления и отдачи энергии, это используется для обеспечения циркуляции реактивной мощности между обмотками асинхронного двигателя и фильтром. Трехфазный инвертор осуществляет преобразование постоянного напряжения, подаваемого от звена постоянного тока, в трехфазное переменное, с регулируемой частотой и амплитудой. Транзисторы работают в ключевом режиме, в каждый момент времени включены три транзистора. Каждая обмотка двигателя в определенный момент времени оказывается подключенной к положительной и отрицательной шине звена постоянного тока. Амплитуда выходного напряжения определяется величиной отношения времени включения ко времени выключения транзисторов. Длительность импульсов формируется по синусоидальному закону. Частота выходного напряжения преобразователя определяется длительностью цикла срабатывания выходных ключей инвертора. Данный способ управления силовыми ключами инвертора называется широтно-импульсной модуляцией (ШИМ). Для анализа режимов работы силовых ключей в ШИМ-инверторах конфигурации преобразователей со связью по цепи постоянного тока могут быть приведены к полумостовой структуре (рисунок 2). Рисунок 2 — Полумостовая схема В данной схеме применяется поочередная коммутация вентилей при модулируемом по ширине сигнале управления. В результате выходной сигнал инвертора состоит из прямоугольных импульсов напряжения различной ширины VOUT. При резистивно-индуктивном характере обмотки асинхронного двигателя протекающий через нее ток имеет синусоидальную форму (рисунок 3), которая сдвинута по фазе относительно основной гармоники выходного напряжения VOUT1. Рисунок 3 — Выходное напряжение инвертора Биполярный транзистор с изолированным затвором является новым типом активного прибора, который появился сравнительно недавно. Его входные характеристики подобны входным характеристикам полевого транзистора, а выходные характеристикам биполярного. В литературе этот прибор называют IGBT (Insulated Gate Bipolar Transistor). Транзисторы IGBT в основном применяют в ключевом режиме. Для уменьшения количества дополнительных внешних компонентов в состав IGBT-транзисторов вводят диоды или выпускают модули, состоящие из нескольких компонентов. Основные требования, предъявляемые к управлению транзисторами, заключаются в следующем: 1. IGBT транзисторы – это приборы, управляемые полем (напряжением). Поэтому, чтобы перевести их в открытое состояние на затвор необходимо подать напряжение UЗ = 10 … 15 В. 2. Для гарантированного запирания IGBT на их затвор достаточно подать напряжение UЗ = 0, т.к. их пороговое напряжение UЗ0 согласно передаточным характеристикам составляет 2 … 5 В. 3. Входное сопротивление между затвором и эмиттером для БТИЗ очень велико (единицы и даже десятки мегаом), однако оно шунтировано паразитной входной емкостью Свх, находящейся в диапазоне от 20 пФ до 6 нФ в зависимости от мощности транзистора. При высокой скорости переключения данных типов приборов входная емкость сильно загружает их схему управления, поэтому IGBT транзисторы, требуют значительного тока управления при их отпирании за время включения. 4. Для ограничения скорости нарастания тока коллектора в режиме малых нагрузок и уменьшения динамических помех необходимо использовать последовательные сопротивления в цепях затвора. Драйвер представляет собой усилитель мощности и предназначен для непосредственного управления силовым ключом преобразователя. Схема драйвера определяется типом ключевого транзистора (биполярный или полевой), а также расположением транзистора в схеме коммутатора («верхний», когда оба силовых вывода ключа в открытом состоянии имеют высокий потенциал, или «нижний», когда оба силовых вывода ключа в открытом состоянии имеют нулевой потенциал). Драйвер должен усилить управляющий сигнал по мощности и напряжению и в случае необходимости обеспечить его потенциальный сдвиг. Драйверы для управления сложными преобразовательными схемами однофазными и трехфазными, содержат большое количество элементов, поэтому их выпускают в виде интегральных микросхем. Эти микросхемы, помимо усилителей мощности, содержат также цепи преобразования уровня, вспомогательную логику, цепи задержки для формирования «мертвого» времени, а также ряд защит, например, от перегрузки по току и короткого замыкания, снижения напряжения питания и ряд других. Содержится также защита от пониженного напряжения питания драйвера и высоковольтного «плавающего» источника. Особое внимание следует обратить на момент выключения верхнего ключа и включение нижнего, когда один транзистор размыкается, а другой замыкается. На практике время срабатывания транзисторов отлично от нуля и возможна ситуация, когда один транзистор уже успел включиться, а другой еще не успел выключиться, что приведет к короткому замыканию между положительным и отрицательными контактами стойки. Ток, возникающий в этом аварийном режиме, называется «сквозным». Он представляет наибольшую опасность для транзисторов, так как скорость его нарастания ограничена лишь паразитными индуктивностями транзисторов стойки и конденсатора, подключаемого между положительным и отрицательными контактами стойки. Поэтому для исключения аварийных ситуаций положительные фронты управляющих сигналов задерживают на время, называемое «мертвым» [Ошибка! Источник ссылки не найден.]. Приведена временная диаграмма генерации «мёртвого времени» (рисунок 4). Рисунок 4 — Генерация мертвого времени Генерирование «мертвого» времени производится генератором «мертвого» времени, встроенным во все широтно-импульсные генераторы современных микроконтроллеров. Реализовывать схему цифрового формирования защитной паузы «мертвое время» («deadtime») возможно на отечественных дискретных элементах «жесткой логики». В результате задача может быть решена с использованием 16 корпусов микросхем, которые размещаются на отдельной печатной плате. Вот такова «цена вопроса» защиты от сквозных токов [2]. 2 РАЗРАБОТКА И ИЗГОТОВЛЕНИЕ ЛАБОРАТОРНОГО СТЕНДА СИСТЕМЫ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ 2.1 Силовая часть 2.1.1 Описание силовой схемы Лабораторные стенды для исследования частотных преобразователей, изготовленных студентами, расположены в лаборатории электромеханики (0113) слева (рисунок 5). Вследствие небольшой общей площади лаборатории, лабораторные стенды установлены на вертикальных панелях из оргстекла, отстоящих от стены на 50 см. Исследуемый преобразователь частоты Рисунок 5 — Общий вид лабораторных стендов Изготовлены студентами металлические каркасы из уголков, на которых с лицевой стороны закреплены две панели из оргстекла, а с внутренней сто- роны установлены горизонтальные пластины из толстого пластика для асинхронных двигателей. В средней части и по краям из оргстекла изготовлены стеллажи с полками для осциллографа, ноутбуков и другого оборудования, необходимого для проведения лабораторных работ, с возможностью фиксации полок на различной высоте. На левой стороне лицевой панели будут установлены несколько частотных преобразователей с клавишным и иными видами управления. На правой панели располагаются преобразователи с потенциометрическим и другими видами управления. Красной рамкой выделен действующий лабораторный стенд для проведения студентами работ по теме «Частотные преобразователи и способы регулирования частоты вращения асинхронных электродвигателей малой мощности». Поскольку в отдельных элементах системы присутствует высокое напряжение, все блоки установлены за прозрачной панелью из оргстекла. С тыльной стороны стенда платы управления и силовой блок также скрыты монтажной панелью из прозрачного плексигласа. Учебный лабораторный стенд предназначен для изучения конструкции преобразователя частоты, освоения принципа работы автономных инверторов напряжения с широтно-импульсной модуляцией. Стенд позволяет получать 3-фазное переменное напряжение до 220В, с регулируемой частотой от 0 до 120Гц. для управления трехфазным асинхронным двигателем тип АИР56В4У3. Силовая часть имеет встроенную защиту от токов короткого замыкания в цепи двигателя, а также защиту от превышения предельно допустимого тока. IGBT модуль имеет встроенную защиту от перегрева и от пониженного напряжения питания. Плата управления имеет собственный, стабилизированный блок питания, что дополнительно повышает безопасность работы. Собранная и настроенная установка частотного преобразователя для исследования импульсов управления силовыми ключами представлена на стенде из прозрачного плексигласа (рисунок 6). Измерительные гнёзда Блок управления Силовой блок Асинхронный двигатель Рисунок 6 — Общий вид лабораторного стенда В верхней части расположен пульт управления с переключателем «Пуск/Стоп» («0» - стоп, «1» - пуск), регулятор скорости, регулятор ускорения и переключатель «Вперед/Реверс. В верхней части закреплена принципиальная схема двухзвенного преобразователя частоты. В левой части дана схема двухполупериодного диодного моста, а в правой части инвертор напряжения с широтно-импульсной модуляцией (АИН ШИМ). В АИН ШИМ показаны схемы включения шести силовых транзисторов IGBT с параллельно включенными диодами для обратного тока. Каждая пара транзисторов (1 – 2, 3 – 4, 5 – 6) образуют стойку, к серединам которых подсоединяются фазы обмоток асинхронного двигателя. Обратные токи в моменты отключения транзисторов протекают по диодам других стоек и замыкаются через конденсатор, который выполняет не только роль фильтра, но и элемента замкнутой цепи обратного тока. В нижней части принципиальной схемы преобразователя установлены измерительные гнёзда, к которым подключаются входы осциллографа. Эти гнёзда соответствуют базам транзисторов IGBT, поэтому по формам сигналов на осциллографе можно определить работу транзисторных ключей в зависимости от частоты задания. Именно эти сигналы и являются предметом исследования лабораторных работ. В нижней части установлен блок управления, в котором расположен микроконтроллер. В нём загружена программа по коммутации силовых транзисторов, обеспечивающих плавное вращение задающего напряжения. Справа от блока управления закреплен с обратной стороны стекла силовой блок. В левой части этого блока установлены на одном радиаторе два элемента. В одном корпусе в виде монолита находятся силовые транзисторы IGBT и обратные диоды, в другом монолитном корпусе расположены диоды выпрямителя. В силовом блоке предусмотрена защита диодов выпрямителя от больших бросков тока зарядного тока конденсатора (являющееся не только фильтром в силовой части, но и элементом обратного тока) при включении автоматического выключателя, подающего напряжение 220 В. Для этого предусмотрена цепь заряда конденсатора в силовой части через дополнительные сопротивления, обеспечивающие допустимые токи для диодов выпрямителя, которые шунтируются нормально открытыми контактами реле напряжения. Обмотка этого реле включена в коллекторную цепь транзистора, к базе которого включена R-C цепочка, управляющая напряжением включения транзистора в функции времени. Расчёт величин активного сопротивления R и ёмкости C осуществляется таким образом, чтобы при срабатывании реле напряжения и шунтировании добавочных сопротивлений зарядный ток не разрушил бы диоды выпрямителя в силовой части. Существуют два способа реализации системы управления электродвигателем: на основе дискретных компонентов или с помощью готовых интеллектуальных силовых модулей (ИСМ). Использование дискретных компонентов имеет целый ряд преимуществ, главным из которых является гибкость изменения и настройки схемы. Однако этот способ реализации не всегда оправдан. Дело в том, что разработчик должен решить целый ряд весьма непростых задач: уменьшение собственной индуктивности системы. Индуктивность выводов компонентов, проводники на печатной плате, проводной монтаж являются составляющими общей индуктивности. Наличие индуктивности приводит к броскам напряжения при коммутации. Чем больше индуктивность, тем больше амплитуда помех, которые могут привести к пробою силовых ключей; обеспечение «мертвого времени» между включениями транзисторов одной фазы (deadtime); построение схемы измерения тока и реализация защиты от короткого замыкания (КЗ); построение схемы измерения температуры ключей, и реализация за- щиты их от перегрева; согласование времен включения ключей различных фаз для предот- вращения возникновения постоянной составляющей в обмотках двигателя; оптимизация частоты и времени переключения силовых ключей для снижения уровня помех и повышения эффективности. В итоге, чтобы построить привод с помощью дискретных элементов, необходимо иметь в своем распоряжении группу опытных разработчиков и большой запас времени. Если же стоит задача в сжатые сроки разработать привод без сверхвысоких требований к производительности и электрическим характеристикам, то следует использовать готовые интеллектуальные силовые модули [Ошибка! Источник ссылки не найден.]. Рассматриваемые модули представляют собой интегрированное решение для управления трёхфазными электроприводами. Модули эффективно используют биполярные транзисторы с изолированным затвором с низкими статическими потерями и встроенным инверсным быстрым диодом с «мягкой» характеристикой обратного восстановления для минимизации электромагнитного излучения (ЭМИ). Вдобавок к IGBT коммутаторам модули содержат монолитные интегральные схемы драйверов с шестью управляющими выходами, согласованные для наиболее эффективной коммутации IGBT элементов с минимальным излучением шумов и максимальной наработкой на отказ. В модулях IR используются IGBT пятого поколения, позволяющие работать на ультразвуковых частотах ШИМ (до 20 кГц включительно). К их достоинствам также относятся прямоугольная зона безопасной работы и низкий уровень потерь на переключение (особенно при выключении) при относительно низких потерях на проводимость. Возможность работы на более высоких частотах ШИМ обеспечивает отсутствие акустических шумов (одно из требований для бытовой техники) и более широкий диапазон регулирования скорости. Представлен внешний вид силового модуля (рисунок 7). Рисунок 7 — Внешний вид силового модуля Особенности интегрального силового модуля: меньшая, чем у дискретных решений индуктивность цепей, что при- водит к снижению уровня выбросов напряжения и соответственно способности работать на более высоких частотах коммутации с меньшими потерями; интегрированный контроллер (драйвер) требует только шести логи- ческих входов (включая 3,3 В логику) и трех пусковых конденсаторов, подобранных в зависимости от частоты коммутации; задержки включения транзисторов и верхнего и нижнего плеча со- гласованы для предотвращения проникновения постоянного тока в двигатель; встроенный контроль величины паузы при переключении транзисто- ров (IGBT) верхнего и нижнего плеча предотвращает наведенные токи смещения; отказоустойчивая работа обеспечивается встроенными элементами контроля перегрузки по току и перегревом. Обеспечены аналоговый контроль температуры и фазировка силовых выводов. Модули IRAMS содержат шесть IGBT кристаллов, каждый с резистором в цепи затвора, шестью кристаллами коммутационных диодов, одной трёхфазной ИС контроллера уровня смещения, тремя пусковыми диодами с токоограничивающим резистором и NTC термопары для защиты по перегреву. Цепь контроля перегрузки по току следит за входным уровнем напряжения, снимаемого с внешнего датчика, например, с трансформатора тока или резистора. Модули IRAMS используют биполярные транзисторы с изолированным затвором с низкими статическими потерями на рабочее напряжение 600 В, способные выдерживать ток короткого замыкания (КЗ) в течение 10 мс. Транзисторы также оптимизированы для получения минимальных потерь на переключение и проводимости. Встроенные инверсные быстрые диоды с «мягкой» характеристикой обратного восстановления и пониженным падением прямого напряжения при высоких температурах ещё более улучшают характеристики транзистора. Так как потери проводимости приблизительно постоянны на ча- стоте коммутации для данного тока и напряжения шины питания, можно добиться подходящего компромисса в выборе лучшей, для конкретного устройства, частоты коммутации. Электропривод состоит из источника управляющих сигналов, контроллера и силовой цепи. Могут использоваться трёхфазные асинхронные и синхронные электродвигатели. Модули IRAMS объединяют в отдельном корпусе контроллер и силовые цепи, но управляющая система («мозг») должна генерировать синхросигналы, задавать скорость и направление, информацию о ШИМ или ЧИМ для функционирования электропривода. Пяти вольтовая логика более предпочтительна с точки зрения помехозащищённости. Модуль также может работать с 3.3 В логикой, либо с любым импульсным сигналом уровня вплоть до Vcc (+15 В). Монолитная ИС контроллера требует низких логических уровней для управления выходами. Для каждой из трёх цепей верхнего плеча, контроллера верхнего и нижнего плеч требуется источник плавающего напряжения, который генерирует управляющие импульсы на затворы транзисторов верхнего плеча. Наиболее удобный способ получения источников плавающего напряжения - использование пусковых цепей. 2.1.2 Описание работы пусковых цепей Когда транзистор нижнего плеча включен, пусковой конденсатор Cbs заряжается через пусковой диод Dbs, резистор Rbs и коммутатор нижнего плеча S2 почти до 15 В в то время как потенциал вывода Vs практически равен нулю. Конденсатор Cbs подобран так, чтобы удерживать большую часть заряда, когда коммутаторы нижнего плеча выключены и потенциал вывода Vs равен потенциалу шины питания. Затем, напряжение Vbs около 15 В, цепь верхнего плеча смещена конденсатором Cbs. Выбор пускового конденсатора, диода и резистора определяется следующими факторами: 1. Напряжение Vbs должно поддерживаться большим, чем минимальное напряжение блокировки контроллера. 2. Конденсатор Cbs не заряжается точно до 15 В через открытый нижний ключ в зависимости от падения напряжения на пусковом диоде Vfbs и ключе нижнего плеча VceonS2. 3. После включения верхнего ключа конденсатор разряжается следующим образом: а) заряд Qg через затвор верхнего ключа для включения его; б) ток покоя Iqbs верхнего плеча ИС; в) заряд для смещения уровня Qls; г) ток утечки Idl пускового диода Dbs; д) токи утечки Icbs конденсатора; е) обратное восстановление пускового диода Qrrbs. Схема одного из вариантов пусковой цепи (рисунок 8). Рисунок 8 — Схема пусковой цепи Когда проводят ключ или диод верхнего плеча, пусковой диод выдерживает полное обратное напряжение шины питания. Следовательно, при напряжении на нагрузке в 300-400 В, Dbs должен выдерживать 600 В. Пиковый ток диода (Dbs) определяется последовательно включенным резистором Rbs. Однако т.к. скачок тока достаточно короткий, то не требуется точно подбирать диод. Средний ток через пусковой диод определяется зарядом конденсатора Cbs в течении каждого периода коммутации и частотой коммутации. Для уменьшения потерь на диоде и уменьшения габаритов пускового конденсатора заряд для обратного восстановления диода должен быть как можно меньше. По той же причине обратный ток утечки должен также быть малым при наивысших рабочих температурах. Модуль IRAMS10UP60B содержит три пусковых диода и последовательно включенный резистор (включенный внутренне) между напряжением питания Vcc = 15 В и выводами Vb каждой фазы, поэтому только соответствующие пусковые конденсаторы должны быть подключены на печатную плату. Пусковые конденсаторы должны быть подключены как можно ближе к выводам Vb и Vs для снижения паразитной индуктивности соединений. Более того, рекомендуется использовать высокочастотный конденсатор малой ёмкости, включенный параллельно основному низкочастотному пусковому. Для управления ключами инвертора в модулях IR вместо трех кристаллов драйверов верхних ключей и одного драйвера нижних ключей использован один кристалл трехфазного драйвера IR21365. Драйверы серии IR2136x были специально разработаны с учетом специфики привода небольшой мощности, совместимы со всеми типами КМОП и TTL логики с уровнями от 3,3 В. Это позволяет подавать управляющие сигналы от микроконтроллера непосредственно на входы управления верхних и нижних ключей (HIN, LIN) без использования дополнительных преобразующих каскадов. Для снижения цены драйвера снижены выходные токи. Они обеспечивают блокировку по низкому напряжению питания, защиту от перегрузки по току и перегреву. ИС серии IR2136x питаются от единственного источника питания с напряжением 15 В. Как и модули Fairchild, модули IR содержат цепь тепловой защиты на термисторе Rt, но в них дополнительно введены диоды и резистор источника питания драйвера, RC-цепи управления временем срабатывания защиты от перегрузки по току, а также ограничительные резисторы в затворах ключей инвертора. В модулях версии «А» эмиттеры нижних ключей соединены непосредственно с выводами модуля, к которым подсоединяются шунты для получения информации о токах в фазах двигателя. Модули версии «В» содержат встроенный прецизионный без индуктивный шунт Rs в цепи нулевой шины силового питания. Электролитический конденсатор шины питания должен располагаться как можно ближе к соответствующим выводам микросхемы, с целью уменьшения электромагнитных помех. Значения ёмкости конденсаторов зависит от частоты ШИМ, их выбор должен быть основан на рекомендациях по применению. Сигнал с датчика тока может быть получен с вывода 22 «ITRIP». Вывод 21 «Fault/EN» должен быть подключен через резистор к шине питания +5 В. 2.2 Блок управления Выбор микроконтроллера (MCU) является одним из самых важных решений. Основные критерии выбора микроконтроллера представлены ниже в порядке уменьшения значимости: 1. Пригодность для прикладной системы. Возможность её реализации на однокристальном микроконтроллере или на основе какой-либо специализированной микросхемы. 2. Наличие необходимого числа контактов/портов ввода-вывода, т. к. в случае их недостатка он не сможет выполнить работу, а в случае избытка цена будет слишком высокой. 3. Соответствие состава периферийных устройств требуемому (последовательные порты ввода/вывода, RAM, ROM, A/D, D/A и т.д.). 4. Производительность ядра процессора, т.е. вычислительная мощность, позволяющая обрабатывать системные запросы в течение всей жизни системы на выбранном прикладном языке. 5. Объем выделенных в бюджете проекта средств. Если данный микроконтроллер неприемлем для проекта, все остальные вопросы становятся несущественными, и нужно начать поиски другого микроконтроллера. 6. Доступность. MC3PHAC микроконтроллер с законченным программным обеспечением для создания систем управления асинхронным частотно-регулируемым электроприводом [19]. Программное обеспечение данного микроконтроллера не может быть модифицировано, адаптация алгоритма управления к конкретному типу электропривода осуществляется посредством изменения численных констант. Задание констант возможно двумя способами: потенциометрами на плате контроллера проектируемого блока управления или от ПК верхнего уровня, связанного с платой управления по последовательному интерфейсу. Основные характеристики алгоритма управления, реализуемого MC3PHAC: 1. Формирует шесть ШИМ модулированных сигналов управления драйверами силовых ключей трёхфазного мостового инвертора. Форма выходного напряжения синусоидальная, частота коммутации может варьироваться в пределах от 5,291 до 21,164 кГц. В алгоритме управления ключами предусмотрена возможность изменения мёртвого времени от 0,5 до 6,0 мкс (0-32 мкс в расширенной версии программы управления). Имеется вход аппаратной защиты силовых ключей, высокий логический уровень, которого переводит сигналы управления вентилями в неактивное состояние. Восстановление сигна- лов управления ключами инвертора выполняется автоматически с программируемой пользователем задержкой относительно момента перехода в неактивное состояние сигнала защиты. 2. Реализует закон управления U/F = сonst с программируемой пользователем вольт-добавкой при нулевой частоте. Предельное значение частоты f может быть установлено, в зависимости от типа двигателя: 50 или 60 Гц. Допускает задание темпа процесса разгона или торможения: от 0,5 до 128 Гц/с. 3. Текущее значение уставки по скорости задаётся в аналоговом виде. Соответствующий вход может быть использован для организации, замкнутой по скорости или по иному технологическому параметру системы. Однако функциональные преобразования, соответствующие передаточной функции контура обратной связи, должны быть выполнены внешними по отношению к MC3PHAC схемами. С целью подавления шумов, аналоговый сигнал на входе текущего задания по скорости обрабатывается с использованием алгоритма цифровой фильтрации, реализованного на основе 24-разрядного представления данных. 4. Управление режимами работы схемы осуществляется двумя логическими сигналами: «пуск/останов» и «направление вращения». Третья гармоника накладывается базовую частоту для максимального использования напряжения полно разрядной шины. Это приводит к 15-процентному увеличению максимальной амплитуды по сравнению с чистой модуляцией синусоидального сигнала. Форма сигнала модифицирована по частоте 5.3 кГц (кроме случая, когда частота ШИМ составляет 15.9 кГц), получая приближенно непрерывный сигнал. При 15.9 кГц, форма сигнала модифицирована в 4.0 кГц. Выбранный микроконтроллер генерирует шесть сигналов ШИМ, которые модулируются с переменным напряжением и переменной частоты, чтобы управлять трехфазным двигателем переменного тока. Типовая схема микроконтроллера с ручным управлением (рисунок 9). Рисунок 9 — Типовая схема включения в режиме ручного управления DSP-фильтрация – 24-битный цифровой фильтр с бесконечной импульсной характеристикой (IIR) используется на входе сигнала скорости в автономном режиме для стабилизации скорости в условиях повышенных электрических помех. Период осуществления выборки фильтра - 3 мс (когда частота ШИМ 15.9 кГц). При частоте ШИМ 15.9 кГц период осуществления выборки составляет примерно 4 мс. Высокая точность вычислений - используется 32-разрядная переменная разрешающая способность для точности управления и стабильности работы. Например, скорость двигателя может регулироваться с разрешающей способностью 4 МГц. Плавное изменение напряжения – при изменении скорости отклонения частоты не превышают 1%. Это не допускает толчков или бросков, особенно при повышенном напряжении на низких частотах. Большинство систем привода используют оптроны, чтобы поставлять сигнал ШИМ к транзисторам верхнего плеча [5]. Часто, электрическая схема транзисторов верхнего плеча содержит цепь подпитки, чтобы создать плавающий источник питания для каждого транзистора верхнего плеча [6], это зависит от сигналов ШИМ нижнего плеча, чтобы развить достаточную мощность. При отключении двигателя на некоторое время, заряд на конденсаторе источника питания верхнего плеча спадает и должен быть заряжен прежде, чем возобновится работа ШИМ. Чтобы применить такую топологию, MC3PHAC обеспечивает 100 мс сигнала из 50-процентной ШИМ к транзисторам нижнего плеча при каждом запуске двигателя. Так как верхние транзисторы не задействованы в это время, напряжение к двигателю не приложено. После этого периода, когда ШИМ включается, включаются транзисторы верхнего плеча. Быстрое обновление скорости - при регулировании скорости двигателя большое значение имеет скорость регулирования. Если скорость регулируется плавно, характеристика вращающего момента будет более гладкая. Однако быстрое изменение скорости требует высокой скорости вычислений. В MC3PHAC скорость конвейерной обработки данных позволяет проводить линейную интерполяцию скоростных величин каждые 189 мкс (252 мкс для 15,9 кГц ШИМ). Динамическая компенсация неравномерности напряжения осуществляется следующим образом. Напряжение шины постоянного тока принимается MC3PHAC, и любые отклонения от предопределенной нормы (3.5 В на вывод подвода шины постоянного тока) кончается исправлениями к значениям ШИМ, чтобы противодействовать изменениям напряжения шины, влияющим на ток двигателя. Частота расчета достаточно велика чтобы выполнить коррекцию неравномерности частоты сети. Переключаемая базовая частота – двигатели переменного тока работают при номинальном напряжении с частотой 50 или 60 Гц в зависимости от назначения. MC3PHAC позволяет работать и в том, и другом режимах. Выбор частоты может осуществляться как в автономном режиме в течение инициализации, так и при работе с программным обеспечением PC Master. Выбираемая полярность ШИМ – полярность выводов ШИМ может быть определена таким образом, что высокий логический уровень на выводе ШИМ, может быть утвержденным или инвертированным. В автономном режиме, этот параметр определяется в течение инициализации и применяется ко всем шести выводам ШИМ. В программном режиме полярность верхних сигналов ШИМ может быть установлена отдельно от полярности нижних сигналов ШИМ. Типовая схема включения в режиме управления от ПК (рисунок 10). Рисунок 10 — Схема включения в режиме PC-MASTER Настройки могут быть применены в любое время, но как только это сделано, изменение полярности блокировано, пока не происходит сброс. Любые команды от программы PC Master, которые могут задействовать ШИМ, не выполняются, пока не задана полярность. В автономном режиме, основная частота и полярность ШИМ определяются в то же самое время в течение инициализации, замыкая выводы 25, 26, 27, или 28 с выводом 8 (PWMPOL_BASEFREQ). Выбираемая частота ШИМ - MC3PHAC предполагает, как выбор четырех дискретных частот ШИМ, так и динамическое изменение частоты с помо- щью резистора. Этот резистор может быть переменным или постоянным с величиной сопротивления в указанном диапазоне. В автономном режиме частота ШИМ определяется напряжением, подаваемым на вывод MUX_IN, когда на выводе PWMFREQ_RxD присутствует низкий логический уровень. Выбор мертвого времени ШИМ – помимо выбора частоты ШИМ, можно задавать интервал мертвого времени на комплементарных парах ШИМ. На рисунке 16 показана зависимость мертвого времени от сопротивления. Предполагается использование нагрузочного резистора на 6,8 кОм ± 5 %. В автономном режиме напряжение подается на вывод MUX_IN, в то время как на выводе DT_FAULTOUT присутствует низкий логический уровень. Мертвое время может быть определено с коэффициентом (фактором) масштабирования 2,075 мкс на вольт и может находиться в интервале от 0 до 32 мкс. И в автономном режиме, и при работе в программе PC Master интервал мертвого времени может задаваться один раз, пока не будет произведен сброс. График зависимости «мертвого времени» от сопротивления резистора задания MUX_IN (рисунок 11) имеет незначительную кривизну, но при рекомендуемой в инструкции [19], величине в 6,8 кОм лежит в пределах 5,2 мкс. Что вполне приемлемо для выбранного силового модуля. Рисунок 11 — Зависимость мертвого времени от резистора задания MUX_IN Управление скорости - синхронная частота может быть определена в реальном времени и принимает значение от 1 Гц до 128 Гц, подавая сигнал на вывод SPEED. Коэффициент задания - 25.6 Гц на вольт. Этот параметр может также управляться непосредственно от PC программным обеспечением в реальном времени. Принимаемый сигнал обрабатывается цифровым фильтром на 24 бита, чтобы расширить стабильность скорости при повышенных помехах. Этот фильтр работает только в автономном режиме. В режиме ручного управления управление скоростью происходит с помощью потенциометра R2 сопротивлением 1 кОм. Задание ускорения - ускорение двигателя может быть определено в реальном времени в диапазоне от 0.5 Гц/с до 128 Гц/с, подавая сигнал к выводу ACCEL. Коэффициент задания - 25.6 Гц/с на вольт. Это параметр может также задаваться непосредственно в программном режиме в реальном времени. В режиме ручного управления управление ускорением происходит с помощью потенциометра R1 сопротивлением 1 кОм. Микроконтроллер MC3PHAC имеет вход ошибки (вывод № 15). Высокий логический уровень на этом вводе мгновенно отключает выводы ШИМ. Интервал времени повторения будет инициализирован, как только на этом выводе будет низкий логический уровень. Поскольку на выходе компараторов в случае возникновения аварии мы имеем низкий логический уровень, то сигнал необходимо инвертировать с помощью транзистора VT1, выбираем биполярный транзистор 2N3906. Подключаем к базе транзистора выходы компараторов и выход «Fault-En» (вывод № 21) силового модуля IRAMS10UP60B. При возникновении аварийной ситуации транзистор VT1 обеспечит высокий логический уровень на выводе № 15 микроконтроллера. Вместе с этим низкий логический уровень на выводе № 21 силового модуля обеспечит отключение встроенного драйвера. 2.3 Сборка электрической схемы преобразователя частоты 2.3.1 Проектирование модуля управления и силового модуля Разработка принципиальных электрических схем всегда содержит элементы творчества и требует умелого применения элементарных электрических цепей и типовых функциональных узлов, оптимальной компоновки их в единую схему с учетом удовлетворения предъявляемых к схемам требований, а также возможного упрощения и минимизации схем. Простота и экономичность проектируемых схем обеспечивается применением стандартных типовых узлов, сокращением до минимума числа элементов в схеме и ограничением их номенклатуры. На основе рассчитанных данных, а также руководствуясь рекомендациями по применению силового модуля и микроконтроллера, составляем электрическую принципиальную схему преобразователя частоты [Ошибка! Источник ссылки не найден.], [Ошибка! Источник ссылки не найден.], [Ошибка! Источник ссылки не найден.]. Принципиальная электрическая схема ПЧ разделена на отдельные электрические схемы устройств, которые выполнены в виде печатных плат с разъёмными соединениями. В состав принципиальных электрических схем ПЧ входят: 1. Принципиальная электрическая схема силового блока. 2. Принципиальная электрическая схема блока управления. 2.3.2 Описание работы схемы силового блока Принципиальная электрическая схема силового блока (Приложение Г). Сетевое однофазное напряжение 220В через клеммную колодку J1 поступает на понижающий трансформатор Т1и на выпрямитель VDS1. Постоянное напряжение с выпрямителя сглаживается конденсатором С10, и далее по- ступает на вход шины постоянного тока IGBT модуля (выводы 10,12). Трехфазное напряжение с выхода IGBT инвертора снимается с клеммной колодки J2. Понижающий трансформатор Т1 понижает сетевое напряжение до 12В, которое затем выпрямляется диодным мостом D1-D4. Выпрямленное напряжение сглаживается конденсаторами С1, С2 и поступает на вход линейного стабилизатора U1. Снимаемое со стабилизатора U1 напряжение 15В является питающим напряжением для встроенного в IGBT модуль драйвера, так же 15В поступает на вход линейного стабилизатора U2, с выхода которого снимается 5В для питания цифровой части управляющей платы через разъём J3. В момент включения питания конденсатор С10 заряжается через токоограничивающие резисторы R2, R3, контакт реле KV1, шунтирующий данные резисторы при этом разомкнут. Питание 15В подаётся на схему задержки времени через диод D5, начинает заряжаться конденсатор С8. Спустя 1,5с конденсатор С8 зарядится до напряжения отпирания транзистора VT1, открывшись, VT1 вызовет срабатывание реле KV1, контакт реле замкнётся и зашунтирует токоограничивающие резисторы. Данная цепочка введена в схему для того, чтобы ограничить зарядный ток силового конденсатора, и тем самым защитить от выхода из строя диодный мост VDS1. 2.3.3 Описание работы схемы блока управления Принципиальная электрическая схема блока управления (Приложение Д). Схема обвязки микроконтроллера содержит набор пассивных элементов, обеспечивающих его правильное функционирование. Фильтр аналогового и опорного напряжения питания выполнен на индуктивностях L1,L2; конденсаторах С12, С13, С15. Тактирующая цепочка состоит из кварцевого резонатора Z1 4,0MHZ, резистора R40 и конденсаторов С16,С17. Перемычки (джамперы) JP1-JP10 используются для выбора режима работы блока управления. Верхнее расположение перемычек на плате соответствует режиму ручного управления, нижнее расположение – режиму «PCMaster». Резисторы R38-R43 подсоединяют выходы ШИМ к напряжению питания. Резистивный делитель RV1,R44 используется для задания на выводе 28 микроконтроллера напряжение 3,5В. На плате блока управления расположены устройства защиты по току и по температуре. На микросхеме DA2 собран усилитель токового сигнала, снимаемого с шунта, расположенного в силовом модуле IRAMS10UP60B (вывод 22). Сигнал «ITRIP» усиливается и подаётся на схему сравнения, собранную на компараторе DA1.1, в случае возникновения перегрузки по току, на выходе компаратора появляется низкий логический уровень. На микросхеме DA1.2 собрана схема защиты по температуре. Напряжение, снимаемое с температурного делителя (вывод 13 «VTH») силового модуля, сравнивается с опорным сигналом, и в случае снижения напряжения на температурном делителе ниже опорного, на выходе компаратора появляется низкий логический уровень. Пульт управления собран на переменных резисторах RVS1, RVS2 - регулируют скорость и ускорение. Переключатель S1 выполняет функцию пуск/останов, переключатель S2 –реверс. Схема подключения блока управления к ПК посредствам com-порта собрана на микросхемах U2,U3. Данные микросхемы обеспечивают гальваническую развязку персонального компьютера от преобразователя частоты. Для подключения используется разъём J2. Блок управления соединяется с силовым блоком с помощью гибкого шлейфа, через разъём J3. 2.3.4 Изготовление печатных плат Трассировку печатных плат производим в программе Sprint-Layout 6.0. Платы будем изготавливать методом «ЛУТ». Схема дорожек платы распечатывается на фотобумаге с помощью лазерного принтера. Затем рисунок переносится на медный слой фольгированного стеклотекстолита термическим методом при помощи утюга. Далее платы помещаются в раствор хлорного железа, где химическим методом происходит растворение незащищённых участков меди, таким образом, на плате остаются медные проводники под слоем тонера. Размер силовой платы (рисунок 12) составит 150х150мм, на плате необходимо предусмотреть отверстия для крепления трансформатора Т1 и для крепления теплоотводящего радиатора силового модуля. Рисунок 12 — Фото вид силовой платы в программе Sprint Layout Размер платы управления (рисунок 13) составит 144х132мм. Все микросхемы монтируются в сокеты, предварительно впаянные в плату. Разъём J1 используется для подключения пульта управления. Разъём J2 используется для подключения к ПК. Рисунок 13 — Фото вид платы управления в программе Sprint Layout 2.4 Широтно-импульсная модуляция Описание алгоритма управления ключами АИН с помощью метода векторной ШИМ основано на формировании на каждом временном интервале требуемого положения обобщённого пространственного вектора напряжения. В случае импульсного источника питания, например, автономного инвертора, возможно формирование только восьми состояний (положений) вектора напряжения: шесть ненулевых (от U1 до U 6 ) и два нулевых, формируемых инвертором при замыкании нечётных ( U 7 ) и чётных ( U 8 ) ключей. Такие векторы называют базовыми. При условии симметрии нагрузки амплитуды всех ненулевых базовых векторов равны: 2 U1 U 2 U 3 U 4 U 5 U 6 U d , 3 где Ud – входное напряжение инвертора. Расположение базовых векторов U1 ... U 6 (рисунок 14) , где U ср - вектор среднего (эквивалентного) напряжения, α – угол вектора относительно сектора. Рисунок 14 — Векторная диаграмма выходных напряжений инвертора Каждый вектор однозначно характеризуется своим трёхразрядным двоичным кодом состояния. Алгоритм формирования выходного напряжения инвертора представляет собой последовательность включения базовых векторов напряжения, связанную определенными временными соотношениями. Под вектором среднего (эквивалентного) напряжения инвертора, под U ср подразумевается вектор выходного напряжения, усредненного на временном интервале дискретности управления АИН. Любой алгоритм должен формировать в нагрузке заданное значение U ср с помощью выбранной элементарной комбинации векторов U y , которые образуют элементарный цикл переключения ключей АИН. Весь алгоритм складывается из совокупности повторяющихся элементарных циклов. Сформулируем математически задачу векторного формирования алгоритма: U ср где 1 ti U i i U i , Tц i i Tц - период цикла модуляции (продолжительность элементарной комбинации векторов); U i - i-й вектор, входящий в элементарную комбинацию; ti , i ti - абсолютная и относительная продолжительности включения Tц i-го вектора напряжения. В дополнение уравнения (7) вводятся ограничения, следующие из физического смысла задачи: n 0 ti Tц , ti Tц , i 1 где n - общее число векторов напряжения в элементарной комбинации векторов. Один и тот же вектор эквивалентного напряжения может быть сформи- рован с помощью множества различных элементарных комбинаций выходных векторов АИН, то есть с использованием различных алгоритмов управления. Типовым решением при выборе состава элементарной комбинации векторов напряжения является выбор двух ненулевых и одного нулевого векторов, образующих сектор, в котором находится заданный вектор эквивалентного напряжения. Алгоритмы, полученные таким способом, являются наиболее эффективными с точки зрения рассмотренных ранее критериев. Например, треугольный алгоритм реализует в первом секторе векторной диаграммы напряжений элементарную комбинацию (рисунок 15). Рисунок 15 — Элементарная комбинация в первом секторе векторной диаграммы Во втором секторе векторной диаграммы элементарная комбинация базовых векторов будет иметь вид U 2 U3 U7 U3 U 2 U8 . В остальных секторах элементарные комбинации формируются аналогично. Чтобы минимизировать число коммутаций ключей АИН, последовательность включения векторов выбирается таким образом, чтобы каждый переход к новому состоянию сопровождался переключением только одной фазы АИН. Именно поэтому после ненулевого вектора U2 (110) следует нулевой вектор U8 (111), а после ненулевого вектора U1 (100) - нулевой вектор U7 (000). Возможные дискретные включения силовых ключей автономного инвертора напряжения (АИН) (8 различных положений) с их кодами состояния и направлением образующих векторов приводим из этой работы [19], (см. рисунок 16). + 1А uп А 1B B 2А 1C C 2B 2C – usa Нагрузка usb Za usc Zb Zc Рисунок 16 — Структура системы широтно-импульсной модуляции Все основные комбинации включения силовых ключей инвертора представлены в таблице 1. Таблица 1 — Возможные дискретные включения силовых ключей инвертора Номер Состояния схемы комбинац 1 2 3 4 5 6 7 ии Замыкани 1А 2В 1А 1В 2А 1В 2А 1В 2А 2В 1А 2В 1А 1В е ключей 2С 2С 2С 1С 1С 1С 1С Код 100 110 010 011 001 101 111 состояния А В С А В С А В С А В С А В С А В С А В С Схема + + + + + + + питания нагрузки – – Вектор напряжен ие U S – – – – 8 2А 2В 2С 000 + – А В С – U1 U2 U3 U4 U5 U6 U7 U8 β β β β β β β β α α α α α α α α Он показывает, что вращающийся вектор U * можно определить с помощью следующей формулы: Uср 2 U2 3 U3 0 U0; Uср U *. В приведенной формуле 2 и 3 - относительные длительности попеременного включения силовых ключей, реализующих векторы U 2 и U 3 . Естественно, если предположить, что 2 3 , т.е. за некоторый промежуток времени, равный половине периода модуляции, нагрузка будет питаться схемой с кодом 010, а другую половину - с кодом 110, то вектор U * будет находиться посередине векторов U 2 и U 3 . Период, в течение которого происходят эти переключения с выдержками времени 2 и 3 , автор назвал периодом модуляции ШИМ или усреднения (аппроксимации). Покажем векторы U 2.1 , U 2.2 , U 2.3 , …, U 2.10 и рассмотрим работу формулы Uср 2 U2 3 U3 0 U0 при движении от U 2 к U 3 по вертикали за соответствующие периоды модуляции (аппроксимации или усреднения). Подробно приведем расчет процесса получения вращающегося вектора в начальной, средней и конечной частях для первого сектора. Сектор 1. Точка 1.1. Исходные данные: U 1.1' 3 U* 0,866025403 const; 1.1' 2 u 2 60; u1 0; 1.1' 6 n 6 1 6; U1 U 2 U 1. Относительные длительности работы ключей с кодами 000 → 110 → 100 → 111 → 100 → 110 → 000: 3 3 U * sin u 2 sin 60 6 sin 60 6 1.1' 1.1' 2 2 0,809016994; 1.1' 1 sin 60 0 U sin u 2 u1 3 1 2 3 U * sin u1 sin 6 0 1.1' 1.1' 2 0,104528463; 2.1' U sin u 2 u1 3 1 2 1.1' 0.1' 2.1' 0,809016994 0,104528463 0,913545457; 1 1.1' 2.1' 1 0,913545457 0,086454543. Среднее напряжение за период модуляции: 1 3 U1 U 2 U 0 0,809016994 1 j 0 0,104528463 j 1.1' 1.1' 2.1' 0.1' 2 2 U 3 0,104528463 0,861281225 j 0,090524304 ; 2 0,809016994 0,052264231 j u ср uaср u ср 0,861281225; 1 3 1 3 ubср u ср u ср 0,861281225 0,090524304 2 2 2 2 0, 430640612 0,078396346 0,352244265; 1 3 1 3 ucср u ср u ср 0,861281225 0,090524304 2 2 2 2 0, 430640612 0,078396346 0,509036958. Работа векторного модулятора по секторам (рисунок 17). u ср +1 ua U1 1 ор т к се a 4' 5' 7' U2 сектор 2 U2.0' 2' θu U2.2' 20 ° θ u2 4' =1 3 3' b 3 2 =6 0° U e* U2.5'=U2.5 5' U *f ' θu θu U1.9' 1' 1 2 *2 .2 *2 .1 ' 9' 10' +j 10' f U a* 8' 6 U1.1' U1.5' 6' 1' 2' 3' сек т ор U b* 6' 7' 8' U2.9' 9' 10' U3 U2.10' U3.2' U3.5' 1' 1 2 2' ub U d* U c* 3' U3.9' 4' 5' c сек т ор 3 6' 7' d 8' 9' 10' т ор сек 4 U4 Рисунок 17 — Последовательный переход вращающегося вектора Далее показаны не только схемы переключения силовых ключей с кодами, но и средние напряжения на интервалах модуляции в фазах a, b и c (см. рисунок 18). 3 2 2.1' + 1 1B Za Zb 0 – 0 Za 2C 2B 2C 2B 2C Zc – Zb Zc Zb Zc 1 1 u 2 1 + 1A Za 2 2 0 1 + 1A 2.1' 2 1.1' 2 0 1 + 2 1.1' 2 0 1 1A – 3 3 2 0 Zc 2 u ср u ср 2 0 t 0 1 ua 1 2 1 1 2 uaср t 0 ub 1 1 2 2 t 0 1 uc 1 2 ubср 2 t 0 + – 0 1 1 0.1' 2 0 0 + 2A 2B 2C Za Zb Zc Zb t u 4 Za – 0 0.1' 1B 2C 1 1 1 1 1 ucср 2 2 1 1A 1B 1C Za Zb Zc 1 0.1' 4 + – – 0 Точка 1.5 (точка «а»). Исходные данные: 3 U* 0,866025403 const; 1.5' 1.5' 2 U u 2 60; 1.5' 6 n 6 5 30. 0 0 2A 2B 2C Za Zb Zc Рисунок 18 — Картина процесса получения среднего вектора U 1.1' u1 0; 0 1 1A Относительные длительности работы ключей с кодами 110 - 100 - 110: 3 U * sin u 2 sin 60 30 1.5' 1.5' 2 0,5; 1.5' 1 sin 60 0 U sin u 2 u1 3 U * sin u1 sin 30 0 1.5' 1.5' 2 0,5; 2.5' 1 sin 60 0 U sin u 2 u1 1.5' 0.5' 2.5' 1; 1 1.5' 2.5' 0. Среднее напряжение за период модуляции: 1 3 3 U 2 0,5 1 j 0 0,5 j 0,5 0,25 j 0,5 1.5' 1.5' 2.5' 2 2 2 0,75 j 0,433012701; u ср u ср U U1 uaср u ср 0,75; 1 3 1 3 3 ubср u ср u ср 0,75 0,5 0,375 0,375 0; 2 2 2 2 2 1 3 ucср u ср u ср 0,375 0,375 0,75. 2 2 Во всех других точках результаты расчетов приведены в таблице 2. Таблица 2 - Результаты расчетов № 1 U1.* i ' 3 1.i ' 2.i ' 1.i ' 2.i ' 0.i ' 0,809017 0,104528 0,913545 0,743145 0,207912 0,669131 U 1.i ' uaср ubср ucср 0,090524 0,861281 -0,352244 -0,509037 0,847101 0,180057 0,847101 -0,267617 -0,579484 0,021852 0,823639 0,267617 0,823639 -0,180057 -0,643582 0,994522 0,005478 0,791154 0,352244 0,791154 -0,090524 -0,700629 1 0 0,75 0,433013 0,75 0 -0,75 u ср u ср 0,086455 0,861281 0,951057 0,048943 0,309017 0,978148 0,587785 0,406737 0,5 0,5 2 2 3 2 3 3 2 4 3 2 5 3 2 Продолжение таблицы 2 1 3 0,406737 0,587785 0,994522 0,005478 0,700629 0,509037 0,700629 0,090524 -0,791154 0,309017 0,669131 0,978148 0,021852 0,643582 0,579484 0,643582 0,180057 -0,823639 0,207912 0,743145 0,951057 0,048943 0,579484 0,643582 0,579484 0,267617 -0,847101 0,104528 0,809017 0,913545 0,086455 0,509037 0,700629 0,509037 0,352244 -0,861281 0 0,866025 0,866025 0,133975 0,433013 0,75 0,433013 0,433013 -0,866025 2 2 3 2 3 3 2 4 3 2 5 3 2 3 ИССЛЕДОВАТЕЛЬСКАЯ РАБОТА 3.1 Описание и порядок работы на стенде Учебный лабораторный стенд предназначен для изучения конструкции преобразователя частоты, освоения принципа работы автономных инверторов напряжения с широтно-импульсной модуляцией (рисунок 19). Рисунок 19 — Лабораторный стенд для исследования импульсов управления Стенд позволяет получать 3-фазное переменное напряжение до 220В, с регулируемой частотой от 0 до 120Гц. для управления трехфазным асинхронным двигателем тип АИР56В4У3 мощностью 0,18 кВт (рисунок 20). Рисунок 20 — Асинхронный электродвигатель стенда Силовая часть имеет встроенную защиту от токов короткого замыкания в цепи двигателя, а также защиту от превышения предельно допустимого тока. IGBT модуль имеет встроенную защиту от перегрева и от пониженного напряжения питания. Порядок работы с стендом: 1. Проверка работы лабораторного стенда. Подайте сетевое напряжение включением автоматического выключателя QF2 на правой боковой панели устройства (см. рисунок 21). Рисунок 21 — Вводные автоматические выключатели стендов На панели управления светится индикационная лампа «СЕТЬ», подсвечены измерительные приборы. На силовом модуле светится красный светодиод «Высокое напряжение», на модуле управления светятся зеленые светодиоды «5V» и «Готовность». Установите регуляторы «Скорость» и «Ускорение» в нулевое положение. Переведите переключатель S1 в положение «I», и двигатель начнёт вращаться. Вращая регулятор «Скорость» убедитесь в изменении частоты вращения двигателя от минимального до максимального значения. Частоту вращения электродвигателя можно отслеживать по прибору «Тахометр». Переключатель «РЕВЕРС» позволяет реверсировать вращение двигателя с «CW» на «CCW». Переключив его убедитесь в наличии возможности реверсировать двигатель. Переведите переключатель S1 в «0», двигатель остановится. 2. Снятие осциллограмм. Для исследования эпюр управляющих импульсов автономного инвертора на фазе A трехфазного асинхронного электродвигателя, необходимо выполнить следующие операции. С помощью комплекта измерительных щупов подключите канал 1 цифрового осциллографа к гнездам на панели управления. Сигнальный щуп подключите к затвору транзистора VT1 (гнездо «A1»), общий щуп подключите к гнезду «общий». Подключите канал 2 осциллографа следующим образом: сигнальный щуп подключите к затвору транзистора VT2 (гнездо «A2»), общий щуп подключите к гнезду «общий». Запустите асинхронный двигатель. С помощью регулятора «Скорость» и индикатора «СКОРОСТЬ ВРАЩЕНИЯ» установите частоту вращения двигателя 300 об/мин. С помощью осциллографа измерьте период управляющих импульсов, и определите частоту питающего напряжения двигателя по формуле f=1/Т. Проделайте данные измерения для различных значений скорости. Результаты измерений и вычислений занесите в таблицу. С помощью канала 2 осциллографа отследите, как изменяется скважность управляющих импульсов при изменении частоты вращения двигателя. 3.2 Правила работы с осциллографом GW Instek Осциллограф обеспечивает использование внутреннего пикового детектора 10 наносекунд при коэффициенте развёртки от 500 нс/дел до 50 с/дел. Усреднение и отображение формы входного сигнала обеспечивается в пределах 2, 4, 8, 16, 32, 64, 128, 256 развёрток. Для удобства в работе реализован автоматический поиск сигнала (автоматическая установка коэффициента развёртки, коэффициента вертикального отклонения и уровня запуска) в полосе частот от 40 Гц до верхней частоты полосы пропускания. Внешний вид осциллографа представлен далее (рисунок 22). Рисунок 22 — Внешний вид осциллографа GDS-71062A Сбор информации осуществляется в режимах: выборка, пиковый детектор, усреднение. Для периодического сигнала осциллографы обеспечивают эквивалентную частоту дискретизации входного сигнала. Объём внутренней памяти осциллографов существенно увеличен. Осциллограф оснащен высококонтрастным цветным ЖК-дисплеем с регулируемой яркостью. Конструкцией предусмотрен интерфейс управления и возможность подключения внешних устройств. Осциллографы обеспечивают возможность подключения к ПК. Основные характеристики: полосы пропускания: 60/ 100/ 150 МГц; число каналов: 2; частота дискретизации: 1ГГц; макс. длина записи: 2 Mб; Отклонение: 2 мВ/дел …10 В/дел; Развертка: 1 нс/дел…50 с/дел (шаг 1-2-5), самописец от 250 мс/дел; Поддержка карт памяти; программирование и подключение к ПК. Встроенный калибратор может выступать в качестве генератора прямоугольного сигнала для демонстрационных целей и вспомогательных нужд. Сигнал калибратора имеет регулируемую частоту и скважность; диапазон выходных частот 1 кГц ~ 100 кГц (шаг 1 кГц); скважность: 5%~95% (шаг 5%). Четыре функции математики и анализа, в том числе новый вид БПФ (в вольтах) на участке 1 Кб. Для целей изучения правил пользования осциллографом, формирования у обучающихся устойчивых навыков ручной настройки схемы запуска и выбора синхронизации имеется возможность блокирования функции авто. Слот для оперативной записи данных на карты памяти обеспечивает беспрецедентный уровень свободы при сборе, хранении и передаче сохранённых результатов в различных форматах: отсчёты/ .csv, профили / .set, экраны / .bmp. Сохранение двух осциллограмм входного сигнала в качестве опорных шаблонов; вывод на экран осциллографа одновременно с текущими сигналами. Коэффициенты отклонения каждого из каналов вертикального отклонения осциллографов имеют значения от двух милливольт до десяти вольт. Погрешности отклонения каждого из каналов не превышает плюс минус три процента. Предусмотрено ограничение полосы пропускания входного сигнала, для фильтрации ВЧ составляющих при наблюдении низкочастотных сигналов. Входной импеданс 1 Мом / 16 пФ. Органы управления функциональными режимами и дополнительными возможностями представлены далее (рисунок 23). Рисунок 23 — Панель управления осциллографа Панель управления осциллографа имеет следующие клавиши: 1. Управление режимами сбора информации. 2. Управление отображением ЖКИ. 3. Управление утилитами прибора. 4. Включение режима подсказок. 5. Автоматическая установка размеров изображения и оптимального режима работы схемы синхронизации. 6. Многофункциональный регулятор (установка значений параметров). 7. Управление курсорными измерениями. 8. Управление автоматическими измерениями. 9. Сохранение и вызов осциллограмм и данных. 10. Экранная копия (вывод изображения). 11. Запуск и остановка сбора данных. Органы управления каналами вертикального отклонения (ВЕРТИК) для изменения режимов работы каналов 1 и 2, а также управления развёрткой (ГОРИЗОНТ), с помощью которых выбирается режим работы развёртки, корректируется горизонтальный масштаб, расположение и растяжка сигнала представлены далее (рисунок 24). Рисунок 24 — Панель управления осциллографа Режимы связи входного усилителя осциллографа: закрытый вход AC – для прохождения на вход усилителя вертикаль- ного отклонения сигналов с частотой более 10 Гц (рисунок 25); Рисунок 25 — Пример исследуемого сигнала с закрытом входом открытый вход DC - для прохождения сигналов во всей полосе ча- стот, включая постоянную составляющую (рисунок 26). Рисунок 26 — Пример исследуемого сигнала с открытым входом Осциллограф обеспечивает следующие режимы работы каналов вертикального отклонения: наблюдение сигналов, математические операции с сигналами, инвертирование сигнала, быстрое преобразование, автоустановку. Пользователю доступны следующие математические операции с осциллограммами: сложение, вычитание, умножение. Новые осциллографы обеспечивают все классические режимы работы трактата горизонтального отклонения: сбор данных в реальном времени (работа на основной развёртке), цифровая растяжка окна (рисунок 27). Рисунок 27 — Пример цифровой растяжки окна В режиме «X-Y» входом оси X является сигнал, подаваемый на вход канала 1, а входом оси Y является сигнал, подаваемый на вход канала 2. Нормированный фазовый сдвиг составляет ±3° на частоте 100 кГц. Разработчиками в моделях серии GDS -71хххА предусмотрены все типовые режимы запуска и синхронизации. Осциллографы обеспечивают следующие виды запуска развёртки: автоматическая, ждущая, однократная, видео. Для измерительных приложений, тестирования РЭА или отладки схем доступно задание условий запуска по длительности импульса. Кроме того, осциллографы обеспечивают задержку запуска развёртки. Режимы синхронизации: внутренняя синхронизация сигналом в каналах, от сети, от внешнего источника. Благодаря предусмотренным в ПО плагинам (подключаемым программным модулям) выполнение анализа осциллограмм, а также документирование результатов стало удобным и лёгким. Достаточно соединить осциллограф с ПК при помощи кабеля и последующим кликом мыши отправить собранные данные для обработки и представления их в табличном или текстовом виде. При необходимости имеется возможность задействования режима «Задержка» для смещения отображения осциллограммы по оси времени (горизонтальной шкале) относительно точки запуска развёртки. При изменении развертки осциллограмма сигнала на экране всегда будет располагаться в соответствии с заданным значением временной задержки для удобства наблюдения без дополнительных манипуляций её позиционирования относительно масштабной сетки. ЗАКЛЮЧЕНИЕ Результатом данной выпускной квалификационной работы стало создание лабораторного стенда для исследования импульсов управления преобразователя частоты с автономным инвертором и широтно-импульсной модуляцией. Преобразовательная техника достаточно сложная область инженерного знания. Очень многое определяется здесь не столько теоретическими знаниями, сколько опытом, полученным в процессе выполнения собственных разработок, изготовления макетных и опытных образов, живого поиска путей улучшения технических характеристик разработок. Пути решения той или иной технической проблемы силовой электроники могут быть весьма нетрадиционными, хотя, конечно, существует ряд правил, без соблюдения которых точно ничего работоспособного разработать невозможно. Проделанную работу можно разделить на три крупных этапа: схемотехнический, конструктивный и исследовательский. На первом этапе были рассмотрены основные способы частотного управления асинхронного электропривода, были определены подходы к решению задач управления асинхронным электроприводом. Был произведен обзор схемотехнических решений построения частотных преобразователей. Были изучены способы управления IGBT-транзисторами, рассматривались различные варианты построения силовых схем, а также схем управления. Была рассмотрена линейка драйверов для IGBT-транзисторов. Была изучена и подобрана элементная база для построения преобразователя частоты. В процессе работы проводилось макетирование и успешное опробование создаваемого устройства. Результатом второго этапа стало создание учебного лабораторного стенда, на базе сконструированного преобразователя частоты. Учебный лабораторный стенд предназначен для исследования преобразователя частоты, изучения принципа работы автономных инверторов напряжения с широтно- импульсной модуляцией. Стенд позволяет получать трехфазное переменное напряжение до с регулируемой частотой для управления трехфазными асинхронными двигателем АИР56В4У3 мощностью 0,18 кВт. Данный стенд может быть использован в учебном процессе для исследования управления асинхронными двигателями с помощью частотного преобразователя. На третьем этапе был описан порядок работы со стендом, конструкцией лабораторного стенда, изучены назначения органов управления и индикации на лицевой панели. Мы ознакомились с исследуемой схемой преобразователя частоты. Рассмотрено назначение коммутационных гнёзд. А также экспериментально исследованы зависимости скорости вращения асинхронного двигателя от частоты и формы управляющих импульсов.