elektromehanicheskiy-privod-dlya-upravleniya-eleronami-letatelnogo-apparata
реклама

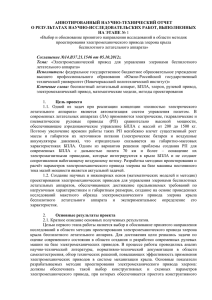
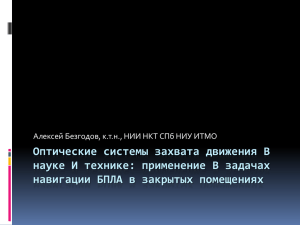
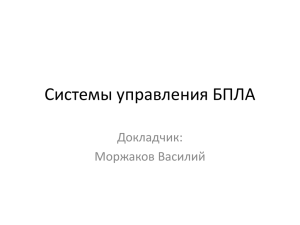
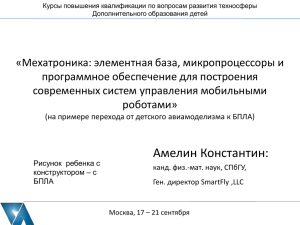
ISSN 0321-2653 ИЗВЕСТИЯ ВУЗОВ. СЕВЕРО-КАВКАЗСКИЙ РЕГИОН. ТЕХНИЧЕСКИЕ НАУКИ. 2013. № 1 УДК 629.7.062 ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ УПРАВЛЕНИЯ ЭЛЕРОНАМИ ЛЕТАТЕЛЬНОГО АППАРАТА 2013 г. Д.В. Батищев, А.А. Гуммель, К.Р. Гильмияров Южно-Российский государственный технический университет (Новочеркасский политехнический институт) South-Russian State Technical University (Novocherkassk Polytechnic Institute) Рассмотрены вопросы создания электромеханического привода для управления элеронами беспилотного летательного аппарата. Предложено конструктивное исполнение электромеханического привода элерона с учетом интеграции его в крыло. Определены предварительные размеры и характеристики привода. Ключевые слова: беспилотный летательный аппарат; (БПЛА); элерон,; рулевой привод’ электромеханический привод; математические модели; методы проектирования. The paper presents questions of development of electromechanical actuators for aileron UAV. Design concept the electromechanical actuator aileron with the integration into the wing is presented. Tentative size and drive characteristics specified. Keywords: unmanned aerial vehicle; (UAV); aileron; rudder actuator; electro-mechanical actuator; mathematical models; design methods. Современный уровень и перспективы развития авиационной техники характеризуются повышенными требованиями к массогабаритным показателям исполнительных механизмов (ИМ) приводов летательных аппаратов (ЛА). Одним из наиболее перспективных направлений при разработке пассажирских, транспортных и беспилотных ЛА является переход к концепции самолета с полностью электрифицированным оборудованием с единой централизованной системой электроснабжения, обеспечивающей все энергетические потребности самолета. Преимуществом электрических силовых систем является отсутствие в ЛА системы трубопроводов централизованной системы гидропитания, что улучает массогабаритные показатели и эксплуатационные характеристики ЛА. Научно-технический прогресс, рост сложности, стоимости создания и эксплуатации новой пилотируемой авиационной техники привели к интенсивному развитию беспилотных летательных аппаратов (БПЛА) различного назначения. Гражданская область применения БПЛА весьма значительна: от сельского хозяйства и строительства до нефтегазового сектора и сектора безопасности. Анализ устройств, используемых для механизации крыла показал, что для работы в системе многокомандного управления БПЛА наиболее распространены исполнительные механизмы (ИМ), где в качестве привода используются микродвигатели постоянного тока с постоянными магнитами. Микродвигатель, развивающий небольшой вращающий момент, вращает через редуктор с передаточным отношением 1:80– 1:200 выходной вал исполнительного механизма. На выходном валу закреплена специальная качалка или диск для присоединения тяги управления рулями (рис. 1). а б Рис. 1. Конструкция узлов передачи усилия от исполнительного механизма к рулям при расположении ИМ в фюзеляже (а) или крыле (б) БПЛА Применение качалок на крыле для подсоединения тяг к элерону (рис. 1, а) приводит к незначительному увеличению лобовой площади крыла, что вызывает дополнительное сопротивление и необходимость уве74 ISSN 0321-2653 ИЗВЕСТИЯ ВУЗОВ. СЕВЕРО-КАВКАЗСКИЙ РЕГИОН. личения мощности двигателя. С целью снижения лобового сопротивления крыла БПЛА планируется применить электромеханический привод элерона, размещенный в консоли крыла. Это решение диктует требования по минимизации аэродинамического шарнирного момента, возникающего при отклонении элерона на угол δ. Размеры элерона на крыле БПЛА были выбраны также из соображений обеспечения установившейся скорости вращения БПЛА вокруг оси ОХ при полностью отклоненном элероне (δэ = 10°) на минимальных скоростях полета (VБПЛА<100 м/с) в диапазоне 90 – 120 °/с. Шарнирный момент может быть выражен как ТЕХНИЧЕСКИЕ НАУКИ. 2013. № 1 Для передачи усилия от электромеханического привода к элерону предложена кинематическая схема на базе пространственного кулачкового механизма барабанного типа (рис. 2). Элерон M ш = M шα M шδ , Двигатель в обойме где M шα – шарнирный момент на элероне, вызванный выходом изделия на угол атаки α, M шδ – шарнирный момент на элероне, вызванный его отклонением на угол δ. В свою очередь, а α M шα cуэ αqS эл x α xов bэл , где x α – положение фокуса элерона по углу атаки, xов – положение оси вращения, bэл – средняя аэродинамическая хорда элерона, S эл – характерная площадь элерона; δ M шδ cуэ δqS эл x δ xов bэл , где x δ – положение фокуса элерона по углу отклонения элерона. Положение оси вращения xов выбрано равным 0,25. Такое положение приведет к минимизации шарнирных моментов на дозвуковых режимах обтекания без опасности возникновения осевой перекомпенсации шарнирного момента [1]. Поскольку оценивалось максимальное значение шарнирного момента, значения x α и x δ были выбраны равными 0,45 что соответствует сверхзвуковым режимам обтекания при резком снижении БПЛА. Для расчета крыла и элементов механизации использован панельный метод [2], позволяющий учитывать кривизну, крутку и П-образность крыла. При этом α δ были рассчитаны значения c уэ α и c уэ δ . Расчетное б Рис. 2. Принцип действия привода элерона (а) и его расположение в крыле БПЛА (б) Полученные значения шарнирного момента позволяют рассчитать кинематическую схему, основанную на базе пространственного кулачкового механизма барабанного типа и разработать электромеханический привод. Для управления элероном крыла изделия в электромеханической системе кроме коллекторного двигателя постоянного тока могут использоваться: шаговые двигатели и индукторные электрические машины. Принцип действия этих машин аналогичен, и различаются они, в основном, методом управления. В связи с этим альтернативный исполнительный двигатель будем называть шаговым двигателем (ШД). Основные достоинства ШД по сравнению с коллекторной машиной заключаются в следующем: – высокая надежность, связанная с отсутствием коллектора и щеточного узла; – двигатель обеспечивает полный момент в режиме остановки и его величина однозначно связана с током обмоток; – скорость вращения определяется частотой управляющих импульсов, поэтому можно обеспечит широкий диапазон изменения скоростей; значение угла атаки составило α = 14° = 0,244 рад., α δ α 0,135 0,244 0,033 , c уэ δэл = 10°. Тогда cуэ δ 0,631 . Значение скоростного напора было выбрано равным: q = 65000 Н/м2 [1]. Тогда, подставив все значения в приведенные выше формулы, получим: M шα 0,137 Н м, M ш 2, 625 Н м. Шарнирный момент M ш = 0,1372, 625 2, 76 Н м. 75 ISSN 0321-2653 ИЗВЕСТИЯ ВУЗОВ. СЕВЕРО-КАВКАЗСКИЙ РЕГИОН. – однозначная зависимость положения ротора от числа входных импульсов обеспечивает позиционирование ротора без обратной связи; – возможность быстрого старта и реверсирования. При использовании ШД в качестве сервомотора следует учитывать: – ШД присуще явление резонанса; – возможна потеря контроля положения ротора при работе без обратной связи при резкопеременной нагрузке; – потребление энергии практически не зависит от нагрузки; – относительно сложная система управления, включающая в себя многофазный электронный преобразователь; – затруднена работа на высоких скоростях. Известны три основных типа конструктивного исполнения ШД: двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридные двигатели. Лучшие показатели с точки зрения экономичности обеспечивают ШД с постоянными магнитами. Для сравнения эффективности использования ШД в электромеханической системе управления элероном был разработан двигатель [3, 4], который обеспечивает номинальный момент не ниже 0,3 Н∙м, а его конструкция вписывается в размеры, предусмотренные для его размещения в крыле БПЛА. ТЕХНИЧЕСКИЕ НАУКИ. 2013. № 1 Общий вид ШД представлен на рис. 3. Из последнего видно, что ШД представляет собой обращенную электрическую машину, зубчатый ротор которой является внутренним кольцом винтовой пары, управляющей элероном. Статор ШД формируется из шести сдвоенных электромагнитных систем (ЭМС) с постоянными магнитами. После намотки обмоток управления ЭМС устанавливаются в кондуктор и заливаются эпоксидным или другим компаундом. После этого вся сборка обрабатывается для установки подшипников и внешнего размера. Обмотки управления ЭМП (1-4, 2-5, 3-6, рис. 3) соединены последовательно и подключены к трем мостовым преобразователям (рис. 4), которые обеспечивают в обмотках разнополярные импульсы. Порядок коммутации обмоток представлен на рис. 4, б, где знак «+» или «-» соответствует направлению тока в обмотке. Отсутствие тока обозначено нулем. Изменение направления вращения ротора обеспечивается сменой направления токов в обмотках. Таким образом, одно полюсное деление ротора, равное 18°, проходится за шесть тактов коммутации обмоток или шесть тактов с дискретностью в 3°. При максимальном угле поворота кулачкового механизма барабанного типа 330° необходимо выполнить 110 шагов. При этом максимальный поворот элерона составляет 24° (±12°), что обеспечит точность его позиционирования 0,22°. Рис. 3. Общий вид шагового двигателя: 1 – корпус кулачковой пары; 2 – опорные подшипники; 3 – магнитопровод электромагнитной системы; 4 – обмотка управления; 5 – компаунд; 6 – зубчатый ротор; 7 – основание; 8 – стопорная пружинная шайба; 9 – постоянный магнит а б Рис. 4. Схема питания обмотки ЭМП (а) и порядок коммутации обмоток (б) 76 ISSN 0321-2653 ИЗВЕСТИЯ ВУЗОВ. СЕВЕРО-КАВКАЗСКИЙ РЕГИОН. Рассматриваемый исполнительный двигатель является шаговым двигателем с постоянными магнитами на статоре. В процессе его проектирования возникает необходимость определения электромагнитного момента в зависимости от угла его поворота, вычисления индуктивности обмотки, анализ магнитного состояния отдельных участков магнитопровода. Учитывая сложную конфигурацию активного слоя статора и ротора рассматриваемой электрической машины, для решения сформулированных задач необходимо применять методы теории поля [5]. Особенностями магнитной системы рассматриваемой электрической машины является то, что она имеет сложную конфигурацию, значительное количество областей с током, постоянные магниты, а также наличие воздушного зазора. Кроме того, магнитная система является замкнутой и можно считать, что за ее пределами поле отсутствует. В этом случае эффективным является метод конечных элементов, который сводит решение краевых задач к решению хорошо обусловленных систем алгебраических уравнений с разряженными матрицами. При этом были приняты следующие ограничения и допущения: – магнитное поле считается плоскопараллельным; – магнитное поле за пределами расчетной области отсутствует; – кривые намагничивания ферромагнитных материалов однозначны; ТЕХНИЧЕСКИЕ НАУКИ. 2013. № 1 – токи равномерно распределены по токонесущим областям; – вихревые токи отсутствуют. Определение электромагнитного момента производится по результатам расчета магнитного поля с использованием тензоров Максвелла [5, 6]. Для определения электромагнитного момента в случае расчета процессов в электрической машине используется поверхность ротора, прилегающая к воздушному зазору. После вычисления распределения удельного электромагнитного момента вдоль поверхности зазора выполняется интегрирование вдоль этой поверхности и таким образом получается величина электромагнитного момента, действующего на ротор. Расчет магнитного поля выполнен с использованием программной среды FEMM v 4.2 [7]. Полученное в результате расчета распределение индукции магнитного поля позволяет определить электромагнитный момент, возникающий при электромеханическом преобразовании энергии в воздушном зазоре. Геометрические размеры ШД представлены на рис. 3. Выполнен расчет шагового двигателя в соответствии с рекомендациями [3, 4]. В качестве исходных были использованы данные, полученные в ходе предварительных расчётов нескольких вариантов ШД и анализа их результатов моделирования. Расчет проводился для значения МДС обмотки 300 А. На рис. 5 и 6 приведены результаты расчета ШД. Рис. 5. Распределение потоков и индукции магнитного поля в ШД при питании обмоток 2-5 и 3-6 М, Н∙м Рис. 6. Зависимость электромагнитного момента ШД от угла поворота при переключении обмоток в соответствии с таблицей рис. 4, б 77 ISSN 0321-2653 ИЗВЕСТИЯ ВУЗОВ. СЕВЕРО-КАВКАЗСКИЙ РЕГИОН. По рис. 6 видно, что момент спроектированного ШД не опускается ниже 0,25 Н∙м, что подтверждает возможность использования ШД в качестве альтернативного исполнительного двигателя привода элерона. В дальнейшем планируется определить тепловое состояние двигателя и динамические характеристики электромеханического привода элерона БПЛА. ТЕХНИЧЕСКИЕ НАУКИ. 2013. № 1 Литература 1. Чумак П.И., Кривокрысенко В.Ф. Расчет, проектирование и постройка сверхлегких самолетов. М., 1991. 240 с. 2. Дашковский А.А. Расчет панельным методом обтекания крылового профиля потоком несжимаемой жидкости // Тр. ЦАГИ. Вып. 2089. 1989. 3. Гольдберг О.Д. Проектирование электрических машин: учебник для вузов. М., 2006. 4. Ивоботенко Б.А., Козаченко В.Ф. Проектирование шагового электропривода: учебное пособие по курсу «Электропривод роботов и манипуляторов». М., 1985. 5. Вольдек А.И., Попов В.В. Электрические машины. Введение в электромеханику. Машины постоянного тока и трансформаторы : учебник для вузов. СПб., 2007. 320 с. 6. Иванов-Смоленский А.В. Электромагнитные силы и преобразование энергии в электрических машинах. М., 1989. 7. David Meeker. Finite Element Method Magnetics. Version 4.2 User’s Manual: [email protected]. 2008. Статья подготовлена по результатам, полученным в ходе выполнения гранта №14.В37.21.1546 от 05.10.2012г. «Электромеханический привод для управления элеронами беспилотного летательного аппарата» в рамках федеральной целевой программы "Научные и научно-педагогические кадры инновационной России" на 2009-2013 годы. Поступила в редакцию 24 декабря 2012 г. Батищев Денис Владимирович – канд. техн. наук, доцент, кафедра «Электрические и электронные аппараты», Южно-Российский государственный технический университет (Новочеркасский политехнический институт). Тел. (863-52) 5-16-84. E-mail: [email protected] Гуммель Андрей Артурович – инженер-программист, кафедра «Электрические и электронные аппараты», Южно-Российский государственный технический университет (Новочеркасский политехнический институт). Тел. (863-52) 5-16-84. E-mail: [email protected] Гильмияров Константин Ренардович – канд. техн. наук, инженер ГБ №6.12. Южно-Российский государственный технический университет (Новочеркасский политехнический институт). Тел. (863-52) 5-16-84. E-mail: [email protected] Batishchev Denis Vladimirovich – Candidate of Technical Sciences, assistant professor, department «Electrical and Electronic Devices», South-Russia State Technical University (Novocherkassk Polytechnic Institute). Ph. (863-52) 5-16-84. E-mail: [email protected] Gummel Andrew Arturovich – Engineer, department «Electrical and Electronic Devices», South-Russia State Technical University (Novocherkassk Polytechnic Institute). Ph. (863-52) 5-16-84. E-mail: [email protected] Gilmiyarov Konstantin Rinardovich – Candidate of Technical Sciences, Engineer, South-Russia State Technical University (Novocherkassk Polytechnic Institute). Ph. (863-52) 5-16-84. E-mail: [email protected] 78