62.9М2-?
с т а
Федеральное агентство по образованию Российской Федерации
Ф и л и а л «Севмашвтуз» государственного образовательного
учреждения профессионального высшего образования
«Санкт-Петербургский государственный морской технический
у н и в е р с и т е т » в г. С е в е р о д в и н с к е
В.А. С т е н и н
ЭЛЕМЕНТЫ СИСТЕМ
АВТОМАТИЗАЦИИ СЭ
У ч е б н о е пособие
Северодвинск
2007
У Д К 629.12.03
С т е н и н В.А. Э л е м е н т ы с и с т е м а в т о м а т и з а ц и и С Э У : Учебное пособие.
- Северодвинск: Р И О Севмашвтуза, 2007. - 139с.
Ответственный редактор профессор, зав. кафедрой океанотехники и
энергетических установок А.И. Лычаков
Рецензенты:
д.т.н., профессор А.А.Пшеницын;
начальник б ю р о Н Т У П О Ф Г У П « С е в м а ш »
В.Г. Д р о н д е л ь .
И з л о ж е н а методика технических расчетов систем автоматического
регулирования
судовых
энергетических
установок. Последовательно
представлены объекты автоматизации, основы проектирования, статика и
динамика
систем
автоматизации. Содержатся
справочные
материалы,
н е о б х о д и м ы е при курсовом и д и п л о м н о м проектировании.
Предназначено
в
качестве
учебного
пособия для студентов,
о б у ч а ю щ и х с я п о специальности 140200 и 141200. М о ж е т б ы т ь полезна
заводским специалистам в области механомонтажного производства и
энергетических установок, з а н и м а ю щ и м с я проектированием и эксплуатацией
систем автоматизации.
И л . 78, табл. 17, список лит. 42 наименования.
Печатается по р е ш е н и ю редакционно-издательского совета Севмашвтуза.
I S B N 5-7723-0689-1
© Севмашвтуз, 2007 г.
ВВЕДЕНИЕ
Автоматизация
технологических
процессов является одним
из
р е ш а ю щ и х ф а к т о р о в повышения производительности и улучшения условий
труда. Все с у щ е с т в у ю щ и е и стоящиеся п р о м ы ш л е н н ы е объекты и установки в
т о й или и н о й степени оснащаются средствами автоматизации. Проектами
наиболее
сложных
производств,
особенно
в
черной
металлургии,
нефтепереработке, х и м и и и нефтехимии, в энергетике, судостроении и других
отраслях п р о м ы ш л е н н о с т и , предусматривается комплексная автоматизация
ряда т е х н о л о г и ч е с к и х процессов [ 1 ] .
К примеру, автоматизация тепловой части электрических станций
предусматривает:
• д и с т а н ц и о н н о е у п р а в л е н и е или управление машинами и механизмами
на расстоянии;
• теплотехнический
контроль
(измерение)
текущих
значений
п а р а м е т р о в технологического процесса;
• технологическую
сигнализацию
о
состоянии
основного
и
вспомогательного оборудования;
• а в т о м а т и ч е с к у ю защиту основного и вспомогательного оборудования
о т в о з м о ж н ы х п о в р е ж д е н и й в процессе эксплуатации;
• автоматическое
непрерывное
регулирование,
обеспечивающее
автоматическое поддержание технологических параметров вблизи
заданного значения;
• л о г и ч е с к о е управление, обеспечивающее автоматическое включение
или о т к л ю ч е н и е регуляторов, машин, механизмов и установок в
заданной последовательности.
При п р о е к т и р о в а н и и систем автоматизации наиболее
важными
представляются в о п р о с ы разработки структурных схем комплексов средств
автоматизации, ф у н к ц и о н а л ь н ы х и принципиальных схем автоматизации
т е х н о л о г и ч е с к и х процессов, а также расчета регуляторов и регулирующих
органов
и
определения
параметров
их
настройки
при
различных
т е х н о л о г и ч е с к и х р е ж и м а х р а б о т ы оборудования.
Общие
вопросы
проектирования
систем
автоматизации
т е х н о л о г и ч е с к и х процессов достаточно полно освещены в [ 1 ] , однако
п р и м е н е н и е и з л о ж е н н о г о материала в многочисленных случаях автоматизации
т е х н о л о г и ч е с к и х процессов и установок в, частности, судостроении вызывает
о п р е д е л е н н ы е т р у д н о с т и , поэтому автор взял на себя т р у д частично восполнить
этот пробел и предоставить н е о б х о д и м у ю информацию по проектированию
л о к а л ь н ы х систем автоматики.
Г л а в а 1. О б ъ е к т ы а в т о м а т и з а ц и и
1.1. С у д о в а я пароэнергетнческая у с т а н о в к а
Задачей
судовой
пароэнергетической
установки
является
п р е о б р а з о в а н и е химической (ядерной) энергии т о п л и в а в м е х а н и ч е с к у ю
э н е р г и ю д в и ж и т е л я и в э л е к т р и ч е с к у ю или тепловую э н е р г и ю , потребляемую
механизмами
общесудового
и
специального
назначения,
а
также
у д о в л е т в о р я ю щ у ю б ы т о в ы е н у ж д ы персонала и пассажиров судна.
С и с т е м а управления и регулирования всей Я Э У д о л ж н а обеспечивать
п о д д е р ж а н и е в установившихся режимах заданных значений о с н о в н ы х
параметров: мощности р е а к т о р а и т у р б и н ы , температуры, д а в л е н и я , р а с х о д а по
первому, второму и д р у г и м контурам, а также з а д а н н о е качество процессов
регулирования.
В р е ж и м е раздельного управления мощность т у р б и н ы изменяется
независимо от м о щ н о с т и Я П П У . П р и этом реактор работает с заданной
п о с т о я н н о й м о щ н о с т ь ю , несколько большей, чем требуется д л я покрытия
энергетических н у ж д судна. И з б ы т к и пара сбрасываются через Д У У .
М о щ н о с т ь т у р б и н ы при э т о м м о ж е т изменяться о т холостого хода д о
н е к о т о р о г о о г р а н и ч е н н о г о верхнего предела, соответствующего заданной
м о щ н о с т и реактора. П е р е в о д реактора с одного заданного уровня м о щ н о с т и на
д р у г о й осуществляется о п е р а т о р о м , при этом скорость изменения мощности
реактора небольшая ( о б ы ч н о 1% в секунду и менее). Установленная скорость
изменения
мощности
поддерживается
системой
регулирования
или
оператором.
В р е ж и м е совместного управления заданная м о щ н о с т ь реактора
изменяется п о сигналу и в соответствии с изменением нагрузки т у р б и н ы . В
этом
случае установленная
скорость
изменения
мощности
реакторе
п о д д е р ж и в а е т с я системой регулирования. Э т о наиболее э к о н о м и ч н ы й режим
р а б о т ы Я Э У , о б е с п е ч и в а ю щ и й н а и м е н ь ш и й расход ядерного топлива, так как
р е а к т о р в ы р а б а т ы в а е т с т о л ь к о энергии, сколько н у ж н о для покрытия
энергетических нужд (травление излишков пара отсутствует) [ 2 ] . На рис.1.1
представлена функциональная с х е м а управления судовой я д е р н о й ППУ- Здесь
к о м п е н с а ц и я в о з м у щ е н и й , с в я з а н н ы х с изменением расхода пара н »
т у р б о а г р е г а т и соответствующего изменения расхода питательной воды,
поступающей
в
прямоточный
парогенератор,
осуществляется
п р о п о р ц и о н а л ь н ы м изменением м о щ н о с т и ядерного реактора.
В схеме показан о с н о в н о й регулятор - регулятор температуры, с
п о м о щ ь ю которого поддерживается средняя температура теплоносителя
п е р в о г о контура на энергетических уровнях мощности, при этом максимально
используется эффект саморегулирования ядерного реактора.
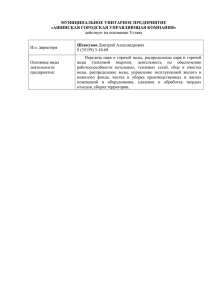
Рис.1.1. Ф у н к ц и о н а л ь н а я схема управления судовой Я П П У :
1 - регулятор мощности; 2 - регулирующие стрежни; 3 - парогенератор; 4 - ходовой
клапан; 5 - питательный клапан; 6 - циркуляционный насос первого контура; 7 регулятор температуры; 8 - реактор.
В Я П П У л е д о к о л о в используются В В Р Д с высокой способностью к
с а м о р е г у л и р о в а н и ю . В связи с этим в реакторе регулирование его м о щ н о с т и в
энергетическом
диапазоне
осуществляется
путем
изменения
расхода
питательной в о д ы в П Г с п о м о щ ь ю питательного клапана (см. рис Л .2). С р е д н я я
температура т е п л о н о с и т е л я поддерживается постоянной с п о м о щ ь ю канала
регулирования т е м п е р а т у р ы , который воздействует на К Р [2].
Для к о т е л ь н ы х пароэнергетических установок обычно п р и м е н я ю т один
из двух с п о с о б о в управления. В первом случае управление осуществляется
паровпускными
клапанами
ГТЗА
при
постоянном
давлении
пара,
генерируемого к о т л а м и . Д а в л е н и е пара поддерживается примерно п о с т о я н н ы м .
Перестановка и р е г у л и р о в а н и е положения паровпускных клапанов о б ы ч н о
осуществляется с п о м о щ ь ю системы дистанционного автоматизированного
управления ч а с т о т о й вращения главных турбин из поста управления
м а ш и н н ы м о т д е л е н и е м л и б о с ходового мостика.
Во втором случае управление осуществляется т о п л и в н ы м и клапанами
котла при п е р е м е н н о м давлении генерируемого пара. М о щ н о с т ь Г Т З А
меняется за с ч е т изменения паропроизводительности котла. Давление пара на
разных р е ж и м а х поддерживается р а з л и ч н ы м : оно возрастает с увеличением
паропроизводительности котла («скользящие» параметры пара). Перестановка
и регулирование положения топливных клапанов котла могут осуществляться
вручную или с п о м о щ ь ю системы дистанционного автоматизированного
управления д а в л е н и е м пара в котле.
Возможно
комбинированное
использование различных
способов
управления у с т а н о в к о й . В этом случае при малых потребных м о щ н о с т я х
установка работает с п о с т о я н н ы м давлением пара в котлах, изменение
мощности Г Т З А осуществляется перестановкой паровпускных клапанов, а д л я
развития п о л н о г о хода судна в котлах повышается д а в л е н и е за счет увеличения
подачи т о п л и в а при п о л н о с т ь ю открытых паровпускных клапанах.
Э
D
Рис. 1.2. Функциональная схема регулирования Я Э У ледокола.
1.2. О с о б е н н о с т и а в т о м а т и з а ц и и к о т е л ь н ы х у с т а н о в о к
Главная судовая котельная установка с о д е р ж и т о д и н или несколько
котлов, о б с л у ж и в а ю щ и е их вспомогательные м е х а н и з м ы , т е ш ю о б м е н н ы е
аппараты и с в я з ы в а ю щ и е их т р у б о п р о в о д ы . Н а судах с Д У и Г Т У во время
х о д о в ы х р е ж и м о в о б ы ч н о работают у т и л и з а ц и о н н ы е
парогенераторы,
и с п о л ь з у ю щ и е теплоту отработавших газов дизелей или газовых т у р б и н , а для
обеспечения х о з я й с т в е н н о - б ы т о в ы х и технологических н у ж д на стоянке судов
с Д У и Г Т У служат вспомогательные парогенераторы.
С и с т е м а автоматического регулирования б а р а б а н н о г о парового котла в
целом с о с т о и т из о т д е л ь н ы х замкнутых систем, в качестве основных из
которых в ы д е л и м с л е д у ю щ и е регуляторы: давления перегретого пара я
тепловой нагрузки; э к о н о м и ч н о с т и процесса горения (избытка воздуха в
топке); питания котловой водой.
Показателем соответствия материального баланса м е ж д у паром и водой
служит уровень
в барабане котла, средний у р о в е н ь воды долями
поддерживаться п о с т о я н н ы м при изменении нагрузки. С н и ж е н и е уровня н и м
д о п у с т и м о г о м о ж е т привести к н а р у ш е н и ю питания и охлаждения водой
п о д ъ е м н ы х труб, н а р у ш е н и ю их прочности, а в наиболее т я ж е л ы х случаях пережогу. Ч р е з м е р н о е п о в ы ш е н и е уровня может привести к ухудшению
действия внутрибарабанных сепарационных устройств, преждевременному
заносу с о л я м и пароперегревателя, а т а к ж е к забросу частиц воды в турбину»
что м о ж е т явиться причиной тяжелых механических повреждений ее ротора и
лопаток.
А в т о м а т и ч е с к и й регулятор д о л ж е н обеспечить постоянство среднего
значения у р о в н я независимо от нагрузки парового котла и д р у г и х
в о з м у щ а ю щ и х воздействий. В переходных режимах изменение уровня
протекает д о в о л ь н о б ы с т р о , поэтому регулятор питания должен поддерживать
постоянство с о о т н о ш е н и я расходов питательной воды и пара. Эту задачу
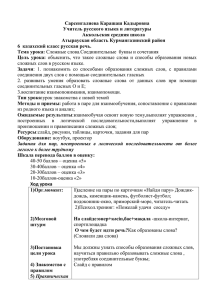
выполняет т р е х и м п у л ь с н ы й регулятор питания, показанный на рис. 1.3.
Регулятор 3 п е р е м е щ а е т клапан 4 при появлении сигнала небаланса
м е ж д у р а с х о д а м и питательной воды и пара. П о м и м о того, он воздействует на
п о л о ж е н и е питательного клапана при отклонении уровня от заданного
значения.
Рис. 1.3. Трехимпульсная С А Р питания водой барабанного котла:
1 - экономайзер; 2 - барабан; 3 - регулятор питания; 4 - питательный клапан.
С у щ е с т в у ю щ и е способы и с х е м ы автоматического регулирования
тепловой нагрузки парового котла и давления пара в магистрали основаны на
принципах регулирования п о отклонению и возмущению или комбинации того
и д р у г о г о и определяются заданным р е ж и м о м работы котла (базовым или
р е г у л и р у ю щ и м ) и с х е м о й подсоединения паропровода перегретого пара к
потребителю (турбине).
Базовым р е ж и м о м называют режим поддержания паровой нагрузки
котла на заданном у р о в н е вне зависимости от изменения общей электрической
или т е п л о в о й нагрузки судовой энергетической установки.
В р е г у л и р у ю щ е м р е ж и м е паровой котел воспринимает изменения
нагрузки на турбоагрегат. Главным способом регулирования давления пара в
регулирующем р е ж и м е является воздействие на расход топлива, подаваемого в
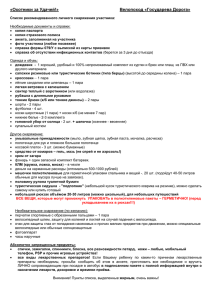
топку. Функциональная с х е м а регулирования давления пара перед турбиной
изображена н а рис. 1.4. Д а в л е н и е пара поддерживается регулятором давления
пара, в о з д е й с т в у ю щ и м на регулятор подачи т о п л и в а в т о п к у 1, а частота
в р а щ е н и я ротора т у р б и н ы - регулятором скорости 2. В базовом р е ж и м е
воздействие регулятора давления переключается на р е г у л и р у ю щ и е клапаны
т у р б и н ы через э л е к т р о п р и в о д синхронизатора.
2
Рис. 1.4. Функциональная с х е м а регулирования давления п а р а перед
турбиной:
I - регулятор подачи топлива; 2 - регулятор частоты вращения ротора турбоагрегата.
О с н о в н ы м с п о с о б о м поддержания оптимального избытка воздуха за
пароперегревателем с л у ж и т и з м е н е н и е количества воздуха, подаваемого в
топку дутьевыми вентиляторами. Существует несколько вариантов схем
автоматического
управления
экономичностью
процесса
горения
по
с о о т н о ш е н и ю различных сигналов.
Количество воздуха, н е о б х о д и м о г о для обеспечения т р е б у е м о й полноты
сгорания, и т о п л и в а при его п о с т о я н н о м качестве связаны м е ж д у собой прямой
п р о п о р ц и о н а л ь н о й зависимостью, устанавливаемой в результате р е ж и м н ы х
испытаний. Если и з м е р е н и е расхода топлива осуществляется д о с т а т о ч н о точно
(это условие легко реализуется при использовании в С Э У газообразного и
ж и д к о г о топлива), то п о д д е р ж а н и е оптимального и з б ы т к а м о ж н о осуществить,
используя схему регулирования подачи воздуха, известную под названием
т о п л и в о - воздух (см. рис. 1.5).
П о д д е р ж а н и е и з б ы т к а воздуха по с о о т н о ш е н и ю т о п л и в о - воздух
отличается простотой и надежностью, но не является т о ч н ы м . Этот недостаток
устраняется в системе регулирования экономичности, д е й с т в у ю щ е й , например,
п о с х е м е т о п л и в о - воздух с дополнительной коррекцией п о с о д е р ж а н и ю
кислорода в продуктах сгорания. Тепловыделение в т о п к е , эквивалентное
тепловой нагрузке котла, м о ж н о о ц е н и т ь по расходу перегретого пара и
скорости изменения давления пара в барабане, т о есть по теплоте. Следует
отметить, что введение дополнительного корректирующего сигнала по
с о д е р ж а н и ю кислорода в д ы м о в ы х газах п о в ы ш а е т точность поддержания
оптимального
избытка
воздуха
в
любой
системе
регулирования
экономичности.
1X3—
Рис.1.5.Функциональная с х е м а регулирования подачи воздуха:
1 -регулятор давления пара; 2 - регулятор подачи воздуха (регулятор экономичности).
1 3 . А в т о м а т и з а ц и я судовых турбоагрегатов
О с н о в н а я задача регулирования главных турбоагрегатов состоит в
п о д д е р ж а н и и или и з м е н е н и и по требуемому закону частоты вращения ротора
турбоагрегата, и, следовательно, связанного с ним через редуктор гребного
вала.
Кроме
того,
с
помощью
локальных
систем
регулирования
поддерживается давление в коллекторе системы уплотнения турбины, давление
в камерах р е г е н е р а т и в н о г о отбора пара, давление и температура смазочного
масла (см. рис. 1.6).
В зависимости от измеряемой величины различают два основных типа
систем д и с т а н ц и о н н о г о управления Г Т З А : системы управления положением
ходового клапана; системы управления частотой вращения. В первых системах
на с т а ц и о н а р н ы х р е ж и м а х положение паровпускных клапанов турбин и
частоты их в р а щ е н и я связаны вполне определенной зависимостью, благодаря
которой у с т а н о в к а положения клапана равносильна установлению частоты
вращения. В д и н а м и ч е с к и х р е ж и м а х возникают некоторые отклонения от
у к а з а н н о й зависимости^ к о т о р ы е сравнительно б ы с т р о затухают ввиду
значительно саморегулирования т у р б и н , работающих на гребной в и н т [ 3 ] .
Рис. 1.6.Функциональная схема регулирования параметров судового ГТЗА:
1-регулятор давления пара в коллекторе концевых уплотнений; 2 - регулятор давления
пара в регенеративном отборе: 3 - регулятор давления масла в системе смазки.
Рис.1.7. Функциональная с х е м а системы управления ГТЗА
перестановкой паровпускного клапана:
1 - регулятор системы управления положением клапана; 2 - регулятор давления пара.
на
П р и управлении п о л о ж е н и е м клапана следует предусмотреть установку
главном паропроводе регулятора давления пара, п о д д е р ж и в а ю щ и й
установленный у р о в е н ь давления пара и р а б о т а ю щ и й на клапан травления (см.
р и с . 1.7).
В системах управления частотой вращения измеряется непосредственно
частота в р а щ е н и я гребного вала и сопоставляется с заданным значением
скорости
хода.
Регулирующим
воздействием
является
положение
паровпускных клапанов турбин. Такие системы иначе называют системами с
в с е р е ж и м н ы м р е г у л я т о р о м скорости.
Н а и б о л ь ш е е распространение на морских судах с паротурбинными
установками п о л у ч и л и системы управления положением
паровпускных
клапанов. О д н а к о б о л е е перспективными являются комбинированные системы,
в которых осуществляется управление
частотой вращения и вводится
коррекция как п о п о л о ж е н и ю ходового клапана, так и маневрового золотника.
1.4. А в т о м а т и з а ц и я к о н д е н с а т н о - п и т а т е л ь н ы х систем
Конденсатыая система обеспечивает отвод из конденсатора конденсата,
обработку его - подогрев и выделение растворенного воздуха, конденсацию
паровоздушной смеси в холодильниках эжекторов, аккумуляцию избыточного
в цикле конденсата и восполнение утечек.
Н а д е ж н о с т ь и экономичность конденсатной системы достигается
регулированием в о б щ е м случае с л е д у ю щ и х величин: уровня в конденсаторе,
уровня и давления в деаэраторе (см. рис. 1.8). Н и ж н е е положение уровня в
конденсаторе д о л ж н о обеспечить н е о б х о д и м ы й подпор на всасывающем
патрубке к о н д е н с а т н о г о насоса д л я исключения кавитации и срыва его работы,
а верхнее - и с к л ю ч и т ь затопление трубок, обусловливающее падение вакуума в
конденсаторе.
Уровень в т е р м и ч е с к о м деаэраторе д о л ж е н обеспечить нормальные
условия д л я п р о ц е с с а р а с п и л и в а н и я , нагрева конденсата и удаления
растворенного в нем воздуха, а также создать необходимый подпор на
всасывающем п а т р у б к е питательного насоса. К р о м е того, регулирование
уровня в д е а э р а т о р е обеспечивает сбрасывание избыточного конденсата в
уравнительную цистерну л и б о добавление из нее конденсата в конденсатную
систему.
Регулирование давления в деаэраторе однозначно определяет подогрев
конденсата д о т е м п е р а т у р ы кипения или близкой к ней, обеспечивающей
наиболее п о л н о е в ы д е л е н и е растворенного в нем воздуха. Следует отметить,
что обеспечение о п т и м а л ь н ы х условий деаэрации возможно регулированием
температуры конденсата. О д н а к о регуляторы температуры более сложны, чем
давления, и и м е ю т б о л ь ш у ю инерционность.
Рис.1.8. Функциональная схема регулирования конденсатнопитательной системы с деаэратором:
I - регулятор уровня воды в конденсаторе; 2 - конденсатный насос; 3 - конденсатор;
4 - уравнительная цистерна; 5 - деаэратор, 6 - регулятор уровня воды в деаэраторе;
7 - регулятор давления среды в деаэраторе; 8 - питательный насос.
1.5. Судовая дизельная установка
Судовые Д В С
работают л и б о на гребные винты, л и б о
на
электрогенераторы,
питающие
током
моторы
гребных
винтов
или
вспомогательных м е х а н и з м о в .
Скорость коленчатого вала является важным качественным параметром
р а б о т ы дизеля, о п р е д е л я ю щ и м количество вырабатываемой им э н е р г и и . С
увеличением нагрузки угловая скорость вала дизеля падает, а с у м е н ь ш е н и е м возрастает. Ч т о б ы сохранить заданную угловую скорость вала при л ю б о й
нагрузке (от нагрузки при холостом х о д е до максимальной) с возрастанием
нагрузки следует у в е л и ч и т ь подачу т о п л и в а в ц и л и н д р ы дизеля и наоборот: с
падением нагрузки у м е н ь ш и т ь подачу топлива.
При работе двигателя на электрогенератор переменного т о к а частота
вращения двигателя, независимо от его нагрузки, д о л ж н а поддерживаться в
узких пределах, так как с ее изменением изменяется частота т о к а в сети.
Н е о б х о д и м а установка автоматических регуляторов частоты вращения
вала двигателя, при наличии автоматизированной схемы дистанционного
управления двигателем, в которых регулятор является одним из основных
узлов.
О д н о р е ж и м н ы е регуляторы (с одним р е ж и м о м настройки) применяют
сравнительно редко (у н е к о т о р ы х дизелей небольшой м о щ н о с т и , работающих
на генератор). Такие регуляторы автоматически п о д д е р ж и в а ю т скоростной
постоянный р е ж и м дизеля независимо о т колебаний электрической нагрузки на
генератор,
В с е р е ж н м н ы е регуляторы п о д д е р ж и в а ю т л ю б о й заданный скоростной
режим д и з е л я : о т м и н и м а л ь н о устойчивой д о максимальной угловой скорости
вала.
Для и с к л ю ч е н и я «разноса» при непредвиденном резком у м е н ь ш е н и и
нагрузки д и з е л и с н а б ж а ю т предельными регуляторами, или автоматами
остановки. П о с л е д н и е не оказывают
регулирующего воздействия на
т о п л и в н ы е н а с о с ы высокого давления ( Т Н В Д ) д о тех пор, пока угловая
скорость вала не достигнет определенного значения, при котором они
полностью в ы к л ю ч а ю т подачу т о п л и в а в ц и л и н д р ы дизеля. В зависимости от
способов воздействия на регулирующий орган различают пропорциональные,
интегральные
и
пропорционально-интегральные
регуляторы
П р о п о р ц и о н а л ь н ы е (П- регуляторы) обеспечивают перемещение рейки Т Н В Д
(см.рис. 1.9)
пропорционально
и з м е н е н и ю угловой скорости
вала.
У
интегральных (И- регуляторов) отклонение угловой скорости вала влияет на
скорость п е р е м е щ е н и я рейки Т Н В Д , а у пропорционально-интегральных ( П И регуляторов) - на абсолютное значение перемещения рейки и ее скорость.
1
Рис. 1.9. Функциональная схема регулирования угловой скорости дизеля:
1 - блок ЦПГ; 2 - рейка ТНВД; 3 - регулятор угловой скорости.
Б о л ь ш и н с т в о с у д о в ы х дизелей имеют жидкостные системы охлаждения.
При с н и ж е н и и температуры воды на выходе из дизеля, а, следовательно, и
уменьшения
количества теплоты, отводимой
в систему
охлаждения,
увеличивается количество теплоты, участвующей в полезной работе газов.
О д н а к о б о л ь ш а я часть этой теплоты тратится на повышение температуры
выпускных газов и стенок деталей цилиндропоршневой группы (ЦПГ). С
повышением
разности
температур
внутренних
и
наружных
стенок
о х л а ж д а е м ы х деталей Ц П Г возрастают температурные напряжения в них,
увеличивается износ п о р ш н е й и цилиндровых втулок [ 5 ] .
П р и п о в ы ш е н и и т е м п е р а т у р ы воды на выходе из дизеля т е м п е р а т у р н ы е
напряжения в деталях Ц П Г и их износ уменьшаются, уменьшается т а к ж е
вязкость масляного слоя между п о р ш н я м и и втулками ц и л и н д р о в , что
о б е с п е ч и в а е т некоторое увеличение механического К П Д , п о в ы ш е н и е в связи с
э т и м э ф ф е к т и в н о й м о щ н о с т и дизеля и с н и ж е н и е удельного р а с х о д а топлива.
Практика показывает, что эффективная мощность, удельный р а с х о д т о п л и в а н
износ д е т а л е й Ц П Г о п т и м а л ь н ы при температуре в ы х о д я щ е й из дизеля воды
80...90°С.
М а с л о , ц и р к у л и р у ю щ е е в смазочной системе дизеля, н е т о л ь к о
у м е н ь ш а е т т р е н и е между с о п р я ж е н н ы м и деталями, предохраняет их от
к о р р о з и й н о г о воздействия о к р у ж а ю щ е й среды и очищает от продуктов нагара
и и з н а ш и в а н и я , но и отводит теплоту от их поверхностей. С учетом последнего
фактора т е м п е р а т у р а масла д о л ж н а б ы т ь минимальной. О д н а к о при с н и ж е н и и
т е м п е р а т у р ы масла увеличивается его вязкость. От вязкости масла зависят
затраты э н е р г и и на его циркуляцию в системе, работа масляного насоса,
ф и л ь т р о в , с е п а р а т о р о в , герметизация узлов трения и условия образования
ж и д к о с т н о г о т р е н и я . П о в ы ш е н н а я вязкость масла, так ж е как и пониженная,
ухудшает условия образования ж и д к о с т н о г о трения, поэтому д и з е л и д о л ж н ы
б ы т ь о б о р у д о в а н ы регуляторами температуры масла в смазочной системе.
В я з к о с т ь топлива, п о с т у п а ю щ е г о в цилиндры дизеля, т о ж е д о л ж н а б ы т ь
в о п р е д е л е н н ы х пределах. Т о п л и в о пониженной вязкости просачивается через
зазоры в п л у н ж е р н ы х парах Т Н В Д , при этом нарушается д о з и р о в к а топлива,
у м е н ь ш а е т с я его цикловая подача, у х у д ш а ю т с я смазочные свойства. Т о п л и в о
п о в ы ш е н н о й вязкости п л о х о распиливается и не полностью с г о р а е т в
ц и л и н д р е , о т ч е г о увеличиваются его расход и нагарообразование на
поверхности к а м е р ы сгорания.
В простейшем случае д л я поддержания вязкости в определенных
пределах могут б ы т ь использованы паровые или электрические подогреватели
т о п л и в а с автоматическими регуляторами температуры 6 0 . . . 7 0 С . Н а и л у ч ш е е
р е ш е н и е задачи достигается включением в топливную систему дизеля
с п е ц и а л ь н ы х автоматических регуляторов вязкости.
Дня обеспечения сгорания т о п л и в а в ц и л и н д р ы дизелей подается
воздух, т е м п е р а т у р а которого существенным образом влияет на э к о н о м и ч н о с т ь
работы дизеля и на температурные напряжения его цилиндров, поршней и
крышек. Т е м п е р а т у р а наддувочного воздуха в компрессоре к концу сжатия
достигает 1 2 0 . . . 1 5 0 ° С . Ч т о б ы увеличить массу воздуха в ц и л и н д р а х в целях
получения м а к с и м а л ь н о й мощности дизеля и снижения температурных
н а п р я ж е н и й Ц П Г , наддувочный воздух охлаждают д о температуры, не
п р е в ы ш а ю щ е й 10... 1 5 С, и она поддерживается в заданных пределах
автоматически.
а
0
Р е г у л и р о в а н и е температуры в системах дизеля может быть произведено
д р о с с е л и р о в а н и е м или перепуском о х л а ж д а ю щ е й (нагревающей) жидкости.
Д р о с с е л и р о в а н и е осуществляется путем изменения проходного сечения
трубопровода, по которому подается в т е п л о о б м е н н и к подогретая ж и д к о с т ь .
Т а к о й с п о с о б п р и м е н я ю т в автоматических системах подогрева топлива паром.
П р и п о н и ж е н и и т е м п е р а т у р ы топлива т е р м о р е г у л я т о р приоткрывает клапан на
паровой м а г и с т р а л и , а при п о в ы ш е н и и , наоборот, прикрывая его, у м е н ь ш а е т
поток
пара. Т е м п е р а т у р у воздуха, п о с т у п а ю щ е г о в дизель, регулируют
перепуском
охлаждающей
жидкости.
При
повышении
температуры
наддувочного
воздуха
терморегулятор
направляет
большую
часть
о х л а ж д а ю щ е й воды в т е п л о о б м е н н ы й аппарат, при понижении температуры часть о х л а ж д а ю щ е й в о д ы перепускает в с л и в н у ю магистраль (см.рис. 1.10).
Рис. 1.10. Функциональная схема регулирования температуры дизеля:
1 - регулятор температуры масла; 2 - регулятор температуры охлаждающей воды;
3 - регулятор температуры воздуха, поступающего в дизель.
А н а л о г и ч н о д е й с т в у ю т и регуляторы температуры воды и масла.
Разница заключается т о л ь к о в т о м , что в системах охлаждения и смазочных
системах поток о х л а ж д а ю щ е й воды (забортной), протекающей
через
т е п л о о б м е н н ы й аппарат, остается постоянным при всех режимах работы
дизеля. Изменяется количество охлаждаемой воды (во внутреннем контуре)
или с м а з о ч н о г о масла, проходящих через теплообменный аппарат. П р и
п о в ы ш е н и и т е м п е р а т у р ы воды во внутреннем контуре на выходе из дизеля
значительная е е часть направляется терморегулятором для охлаждения в
т е п л о о б м е н н ы й аппарат, а при с н и ж е н и и температуры поток жидкости
перепускается в систему м и м о охладителя.
1.6. А в т о м а т и з а ц и я о б щ е с у д о в ы х с и с т е м
К объектам р е г у л и р о в а н и я в различных судовых системах относятся
гидравлические
и
пневматические
емкости
(цистерны,
баллоны,
трубопроводы),
механизмы
(насосы,
вентиляторы,
компрессоры),
т е п л о о б м е н н ы е аппараты п о в е р х н о с т н о г о или с м е ш и в а ю щ е г о т и п а и д р .
С о о т в е т с т в е н н о , р е г у л и р у е м ы м и параметрами являются у р о в е н ь ж и д к о с т и для
гидравлических емкостей; д а в л е н и е газа для пневматических емкостей; число
о б о р о т о в , напорное д а в л е н и е или расход для н а г н е т а ю щ и х м е х а н и з м о в ;
т е м п е р а т у р а на в ы х о д е т е п л о о б м е н н о г о аппарата; влажность воздуха для
систем к о н д и ц и о н и р о в а н и я и д р .
Вентиляция
судовых
помещений
производится
с
помощью
е с т е с т в е н н ы х и искусственных побудителей. Искусственная вентиляция на
судах
осуществляется
электроприводными
вентиляторами,
причем
предусмотрено их местное и д и с т а н ц и о н н о е включение. Р е ж и м р а б о т ы
вентиляторов регулируется дросселированием воздуха на всасывании путем
изменения положения ж а л ю з и (регулирующих заслонок).
С и с т е м а к о н д и ц и о н и р о в а н и я воздуха предназначена д л я регулирования
его т е м п е р а т у р ы и влажности. К р о м е того, воздуху требуется с о о б щ а т ь
п о д в и ж н о с т ь , обеспечивая н е о б х о д и м у ю скорость и к р а т н о с т ь обмена.
У с т а н о в к а состоит из о т д е л ь н ы х элементов для нагревания, охлаждения,
о с у ш е н и я , у в л а ж н е н и я и п о д а ч и воздуха, причем, как правило, осуществляется
полная автоматизация э т и х процессов. Н а рис. 1.11 п о к а з а н а ф у н к ц и о н а л ь н а я
с х е м а автоматизации с и с т е м ы
кондиционирования
помещения.
Схема
включает
в себя т р и
взаимосвязанных
регулятора,
обеспечивающих
п о д д е р ж а н и е в п о м е щ е н и и к о м ф о р т н о й температуры и в л а ж н о с т и воздуха.
С и с т е м а автоматического регулирования холодильной у с т а н о в к и служит д л я
п о д д е р ж а н и я т е м п е р а т у р ы о х л а ж д а е м ы х помещений ( к а м е р и т р ю м о в ) в
у с т а н о в л е н н ы х пределах и обеспечения необходимых значений параметров
р а б о ч е г о цикла. Х о л о д и л ь н а я
установка снабжается т а к ж е автоматически
д е й с т в у ю щ е й п р е д у п р е д и т е л ь н о й сигнализацией, автоматической защитой и
автоматической регистрацией контролируемой температуры.
Структура с и с т е м ы автоматического регулирования
во
многом
определяется п р и н я т ы м т и п о м холодильной установки (компрессионная,
а б с о р б ц и о н н а я или вакуумная). К примеру, на р и с . 1.12
представлена
функциональная
схема
автоматизации
компрессионной
холодильной
установки, в которой с п о м о щ ь ю регулятора поддерживается о п р е д е л е н н а !
т е м п е р а т у р а воздуха в х о л о д и л ь н о й камере.
Средства автоматизации систем водоснабжения п о д д е р ж и в а ю т уровень
в о д ы в расходных цистернах постоянным и производят
автоматическое
у п р а в л е н и е станцией приготовления питьевой воды. С и с т е м ы водоснабжение
чаще
всего
оборудуют
автоматически
действующими
насосами,
н*
нагнетательной
магистрали
которых
устанавливают
пневмоцистерну
Р и с . 1.11.Функциональная с х е м а автоматизации системы
кондиционирования:
1 • калорифер первого подогрева, 2 • оросительная камера; 3 - калорифер второго
подогрева; 4 - вентилятор; 5 - помещение.
Рис. 1.12. Ф у н к ц и о н а л ь н а я схема автоматизации холодильной установки:
1 - конденсатор; 2 - компрессор; 3 - регулятор температуры; 4 - испаритель;
5-дроссель.
( г и д р о ф о р ) . На судах н е б о л ь ш о й мощности в систему в о д о с н а б ж е н и я вместо
п н е в м о ц и с т е р н ы в к л ю ч а ю т водонапорный бак, о б о р у д о в а н н ы й поплавковым
реле. Бак в этом случае располагают на тентовой палубе, и вода из него
с а м о т е к о м поступает к потребителям. Аналогично р а б о т а ю т и средства
автоматизации станции приготовления питьевой воды, с о с т о я щ е й из озонатора,
вентилятор, насоса, э ж е к т о р а и накопительной цистерны с п о п л а в к о в ы м реле.
О с н о в н ы м и объектами регулирования в системах отопления являются
помещения, в которых д о л ж н а поддерживаться заданная т е м п е р а т у р а воздуха,
и генераторы тепловой энергии (котлы паровые, в о д о г р е й н ы е и бойлеры),
в ы р а б а т ы в а ю щ и е т е п л о н о с и т е л ь определенных параметров.
Рис.1.13. Ф у н к ц и о н а л ь н а я схема регулирования с и с т е м ы отопления:
1 - регулятор температуры; 2 - эжектор; 3 - отопительный прибор; 4 - помещение.
Способ регулирования температуры воздуха в п о м е щ е н и я х в основном
определяется выбранной с и с т е м о й отопления. В п а р о в ы х с и с т е м а х отопления
регулирование осуществляется изменением расхода п о д а в а е м о г о в грелку
теплоносителя. В с и с т е м а х водяного и воздушного отопления регулирование
производится
путем
изменения
температуры
теплоносителя
или
периодического п р е к р а щ е н и я подачи теплоносителя в о т о п и т е л ь н ы й прибор
(см. рис. 1.13). Учитывая, что отапливаемые помещения о б л а д а ю т значительной
инерционностью, д л я п о д д е р ж а н и я в них определенной температуры часто
п р и м е н я ю т д в у х п о з и ц и о н н о е регулирование.
Эксплуатационное назначение балластных, о с у ш и т е л ь н ы х , креновых и
грузовых систем р а з л и ч н о ; т е м не менее, их автоматизация имеет много
о б щ е г о . О б с л у ж и в а н и е систем включает контроль у р о в н е й в отсеках и
емкостях. В состав систем входят различные насосы, п р и ч е м их работа н о с и т
эпизодический х а р а к т е р .
запорной а р м а т у р ы , с
включение и о т к л ю ч е н и е
автоматизацию у к а з а н н ы х
С и с т е м ы о б ы ч н о и м е ю т значительное количество
п о м о щ ь ю которой автоматически
производится
участков трубопроводов. В судостроении п о л н у ю
систем п р и м е н я ю т только в специальных случаях.
<5>
Рис.1 . Н . Ф у н к ц и о н а л ь н а я схема автоматического осушения сточного
колодца.
Частичная автоматизация, как правило, предусматривает дистанционное
централизованное у п р а в л е н и е арматурой и насосами с н е п р е р ы в н ы м
контролем о с н о в н ы х параметров: уровней среды, давлений, протока ж и д к о с т и ,
положения р е г у л и р у ю щ е й арматуры.
Б а л л а с т н ы е системы оборудуют приборами дистанционного замера
уровня в отсеках и д и с т а н ц и о н н ы м управлением обслуживающих систему
насосов и а р м а т у р ы .
О с у ш и т е л ь н ы е системы могут иметь дистанционный замер уровней в
льяльных к о л о д ц а х , предупредительную сигнализацию по предельному
уровню в них и автоматический запуск насосов по импульсу уровня или
д и с т а н ц и о н н о е у п р а в л е н и е насосами и арматурой (см. рис. 1.14).
О б с л у ж и в а н и е грузовых систем во время грузовых операций сводится к
управлению к л и н к е т а м и , контролю над уровнем в танках, регулированию
р е ж и м а г р у з о в ы х насосов и своевременному переходу на работу зачистными
насосами.
В соответствии с этим предусматривают следующие элементы
автоматизации: д и с т а н ц и о н н ы й контроль уровня в танках, дистанционное
управление
клинкетами
грузовых
систем, дистанционное
управление
грузовыми н а с о с а м и . Как правило, обеспечивают автоматическую остановку
грузовых насосов в случае разрыва напорного шланга при выкачке груза.
Для судов л е д о к о л ь н о г о назначения необходимо изменение крена и
д и ф ф е р е н т а в л е д о в ы х условиях. Эти изменения в некоторых случаях д о л ж н ы
иметь
периодический
характер,
что
обеспечивается
автоматически
д е й с т в у ю щ и м и устройствами. С п о м о щ ь ю дифферентующего устройства судну
сначала придается д и ф ф е р е н т на корму для поднятия форштевня на кромку
льда, затем насосы п е р е к а ч и в а ю т балластную воду в носовую цистерну, и лед
л о м а е т с я . К р е н у ю щ е е у с т р о й с т в о обеспечивает создание бортовой качки,
п р е д о т в р а щ а ю щ е е вмерзание судна в лед. Ввиду т о г о , что процесс
раскачивания
продолжителен,
система
управления
этой
установкой
а в т о м а т и з и р о в а н а . В системе у с т а н о в л е н о реле времени. Ч е р е з о п р е д е л е н н ы е
п р о м е ж у т к и времени реле срабатывает, и электроприводы насосов меняют
н а п р а в л е н и е вращения.
При
эксплуатации
СЭУ
вследствие
нарушения
герметичности
с о е д и н е н и й т р у б о п р о в о д о в , неудовлетворительной р а б о т ы осушительных
насосов и д р у г и х п р и ч и н в отсеках судна скапливается вода, содержащая
н е ф т е п р о д у к т ы . Такая вода подвергается очистке в сепараторе. Автоматизация
сепараторов трюмных
вод заключается
в автоматическом
удалении
н е ф т е п р о д у к т о в по мере их накопления.
Противопожарная
защита
судов
обеспечивается
извещающей
сигнализацией, огнегасительными, л о к а л и з у ю щ и м и и профилактическими
с и с т е м а м и и устройствами. Сигнализация извещает в а х т е н н ы й персонал о
п о ж а р е в охраняемом п о м е щ е н и и ; огнегасительная с и с т е м а т у ш и т его;
л о к а л и з у ю щ а я система изолирует помещение, в к о т о р о м возник пожар;
п р о ф и л а к т и ч е с к а я с и с т е м а создает условия, при к о т о р ы х устраняется
в о з м о ж н о с т ь его возникновения. Перечисленные средства противопожарной
защиты
могут
быть
частично
или
полностью
автоматизированы.
Автоматизация защиты т р у д н о д о с т у п н ы х или изолированных помещений
о с о б е н н о необходима. На р и с . 1.15 показана схема станции системы О К Б
(система жидкостного тушения на основе бромистых смесей).
|
*
7*
7Г
Рис.1.15.Схема станции системы О К Б :
1 - позиционный регулятор температуры; 2 - охраняемое помещение;
3 - емкость с жидкостью СЖБ; 4 - баллон сжатого воздуха
О с н о в н ы м и процессами, п о д л е ж а щ и м и автоматизации в судовых
с а н и т а р н ы х системах, являются подача пресной воды (мытьевой и питьевой) и
забортной мытьевой воды к потребителям, регулирование температуры
подогрева воды и удаление фекальных вод. Для автоматизации подачи воды в
с а н и т а р н ы х системах устанавливают гидрофор (пневмоцистерну), являющийся
аккумулятором массы (воды) и энергии (давления). Температуру мытьевой
воды п о д д е р ж и в а е т регулятор п р я м о г о действия, клапан которого изменяет
подачу пара в водонагреватель. Функциональная схема такой системы
регулирования показана на рис.1.16. Здесь с п о м о щ ь ю дроссельного регулятора
т е м п е р а т у р ы пропорционально меняется расход греющего пара.
1
Рис Л .16. Регулирование температуры воды в санитарной системе:
1 - теплообменник; 2 - регулятор температуры.
П р и централизованном горячем водоснабжении предусматривается
общая д л я всех потребителей водонагревательная установка, состоящая из
цистерны горячей в о д ы , водонагревателя и насоса. Питьевую воду подают к
потребителям от гидрофора пресной питьевой воды. Забортную воду п о д а ю т в
систему автоматически гидрофором или от какой-либо магистрали другого
назначения (например, пожарной), если о н а находится всегда п о д давлением.
Ф е к а л ь н ы е воды у д а л я ю т из с б о р н ы х цистерн путем откачки насосом или
водоструйным э ж е к т о р о м л и б о их продувки с ж а т ы м воздухом. Соответственно
д а т ч и к и верхнего и нижнего уровня в системе д о л ж н ы воздействовать на пуск
и остановку откачивающего насоса или подачу сжатого воздуха.
Глава 2. П р о е к т и р о в а н и е систем а в т о м а т и з а ц и и
2.1. Э т а п ы проектирования
В соответствии со стандартами проектирование систем автоматизации
судовых энергетических установок выполняют в две стадии: п р о е к т и рабочая
д о к у м е н т а ц и я . Допускается проектирование и в одну с т а д и ю - рабочий проект.
В проекте разрабатывается следующая документация:
• структурная с х е м а управления (для сложных систем управления);
• структурная с х е м а к о м п л е к с а технических средств (КТС);
• структурные с х е м ы комплексов средств автоматизации;
• ф у н к ц и о н а л ь н ы е с х е м ы автоматизации т е х н о л о г и ч е с к и х процессов;
• планы расположения щ и т о в , пультов и оборудования;
• заявочные ведомости приборов и средств автоматизации;
• т е х н и ч е с к и е т р е б о в а н и я на разработку нестандартного оборудования;
• смета на м о н т а ж н ы е р а б о т ы ;
• пояснительная записка;
* задания проектировщику на автоматизацию объектов.
На стадии рабочей д о к у м е н т а ц и и разрабатываются:
• структурная с х е м а управления и контроля;
• структурная с х е м а комплекса технических средств;
• структурные с х е м ы комплексов средств автоматизации;
• ф у н к ц и о н а л ь н ы е с х е м ы автоматизации технологических процессов;
• п р и н ц и п и а л ь н ы е электрические, гидравлические, пневматические
схемы контроля, автоматического регулирования, управления и
сигнализации;
• о б щ и е виды щ и т о в и пультов;
• монтажные с х е м ы щ и т о в и пультов;
• схемы в н е ш н и х электрических и трубных проводок;
• кроссовые ведомости (таблицы подключения);
• планы р а с п о л о ж е н и я средств автоматизации;
• нетиповые чертежи установки средств автоматизации;
• о б ш и е виды нестандартного оборудования;
• пояснительная записка;
• расчеты р е г у л и р у ю щ и х дроссельных органов; расчеты по выбору
регуляторов и о п р е д е л е н и ю параметров их н а с т р о й к и ;
• заказные с п е ц и ф и к а ц и и приборов и средств автоматизации;
• перечень т и п о в ы х чертежей на установку средств автоматизации;
• уточненные задания проектировщику.
Из
перечисленных
составляющих
проектной
документации
о п р е д е л я ю щ и м и являются структура систем управления, функциональные
с х е м ы систем измерения и автоматизации, а т а к ж е расчетная часть,
в к л ю ч а ю щ а я в себя расчет регулирующих дроссельных органов, регуляторов и
параметров их настройки. В определенной степени эти разделы проекта
позволяют о б е с п е ч и т ь как работоспособность систем, так и устойчивость и
качество процессов управления.
2.2. Структура с и с т е м управлении
При разработке проекта автоматизации в первую очередь необходимо
установить п о р я д о к управления объектом, установить взаимосвязи между
объектами, пультами управления, операторскими помещениями, т о есть
решить в о п р о с ы в ы б о р а структуры управления. П о д структурой управления
понимается совокупность частей автоматической системы, на которые она
может б ы т ь р а з д е л е н а по определенному признаку, а также пути передачи
воздействий м е ж д у н и м и [ 1 ] . Графическое изображение структуры управления
называется структурной схемой.
В ы б о р структуры управления объектом автоматизации оказывает
существенное в л и я н и е на эффективность его работы, снижение относительной
стоимости с и с т е м ы управления, ее надежности, ремонтопригодности и т.д.
В с а м о м о б щ е м виде структурная с х е м а системы автоматизации
представлена на рис.2.1. Система автоматизации состоит из объекта
автоматизации и системы управления этим объектом, включающей и
центральный пульт у п р а в л е н и я . Благодаря определенному взаимодействию
между о б ъ е к т о м автоматизации и системой управления система автоматизации
обеспечивает
качественное ф у н к ц и о н и р о в а н и е объекта,
безаварийность
режимов, э к о н о м и ч н о с т ь , н е о б х о д и м ы й у р о в е н ь выходных параметров.
О д н о у р о в н е в ы е централизованные системы применяются в основном
для управления относительно н е с л о ж н ы м и объектами, расположенными на
небольшой т е р р и т о р и и . Большинство судовых и производственных объектов
представляют
собой
сложные
комплексы,
управление
которыми
осуществляется, как правило, многоуровневыми системами.
П о с т р о е н и е систем автоматизации по уровням управления определяется
как т р е б о в а н и я м и снижения трудозатрат н а их реализацию, так и критериями
управления т е х н о л о г и ч е с к и м и объектами.
С и с т е м а автоматизации структурно может быть представлена поразному. В о б щ е м случае любая с и с т е м а изображается конструктивной,
функциональной
или алгоритмической
структурой. В
конструктивной
структуре с и с т е м ы каждая ее часть представляет собой самостоятельное
конструктивное целое. Примером изображения конструктивной структурной
схемы м о ж е т с л у ж и т ь р и с . 2.1. Н а рис.2.2 показана структурная с х е м а
измерения и у п р а в л е н и я дизельной установкой.
В ф у н к ц и о н а л ь н о й структуре каждая часть предназначена
для
выполнения о п р е д е л е н н о й функции, а в алгоритмической структуре - для
выполнения о п р е д е л е н н о г о алгоритма преобразования входной величины,
являющегося частью а л г о р и т м а функционирования с и с т е м ы в целом.
1
f
\
1
У
2
Рис.2.1 .Структурная схема системы автоматизации в общем виде:
1- объект регулирования; 2- ЦПУ и система автоматического управления.
D
10
1
г
3
4
5
Y
С1
7
S
6
сг
9
L1
Рис.2.2. Структурная с х е м а измерения и управления д и з е л ь н о й установкой:
1 -датчик скорости; 2 - датчик давления масла; 3 - датчик температуры выхлопных газов; 4 датчик температуры масла; 5 - датчик температуры охлаждающей воды; 6- исполнительный
механизм, 7 - цифровая индикация; 8 - мнемосхема; 9,11 - задатчики; 10 - рейка топливного
насоса; Д - дизель; У - ЦПУ; С1 * локальная система регулирования частоты вращения ваяя;
С2 - локальная система регулирования температуры охлаждающей воды
Учитывая, что в проекте отдельно составляются структурные с х е м ы
управления и контроля, К Т С и К С А , отметим, что в структуру комплекса
технических средств ( К Т С ) входят технические
средства операторских и
диспетчерских п о м е щ е н и й , щиты н пульты, трубные и электрические
проводки, комплексы
информационно-управляющих систем ( К Т С Л И У С ) ,
агрегатные
пневматические
комплексы
(«Режим»
и др.),
комплексы
вычислительных
средств. В комплекс средств автоматизации
(КСА)
включаются
датчики,
измерительные
преобразователи,
усилители,
и с п о л н и т е л ь н ы е м е х а н и з м ы , регулирующие органы, регуляторы, главные и
обратные связи, л о к а л ь н ы е системы регулирования.
2.3. Ф у н к ц и о н а л ь н ы е с х е м ы автоматизации
Ф у н к ц и о н а л ь н ы е с х е м ы являются основным техническим документом,
определяющим
функционально-блочную
структуру
отдельных
узлов
автоматического контроля, управления и регулирования технологического
процесса и о с н а щ е н и я объекта управления приборами и средствами
автоматизации.
О б ъ е к т о м управления в системах автоматизации технологических
процессов является совокупность основного и вспомогательного оборудования,
причем создание э ф ф е к т и в н ы х систем автоматизации возможно только на
глубоких знаниях как объектов управления, т а к и технологических процессов.
Ф у н к ц и о н а л ь н ы е задачи автоматизации, как правило, реализуются с
п о м о щ ь ю т е х н и ч е с к и х средств, в к л ю ч а ю щ и х в себя: датчики, преобразователи
информации, в т о р и ч н ы е приборы, усилители, исполнительные механизмы,
регулирующие о р г а н ы , регуляторы, комбинированные комплектные
и
вспомогательные устройства.
О с н о в н ы м результатом составления функциональной схемы является:
выбор м е т о д о в измерения технологических параметров, выбор основных
технических средств автоматизации и приводов исполнительных механизмов,
размещение средств автоматизации.
Технологическое оборудование и коммуникации при разработке
ф у н к ц и о н а л ь н ы х схем д о л ж н ы отображаться упрощенно, однако следует
сохранять я с н о е представление о принципе их работы и совместном
взаимодействии.
Приборы
и средства автоматизации
показываются условно
в
соответствии с о стандартами. Условные основные обозначения приборов и
средств автоматизации по Г О С Т 21.404-85 показаны н а р и с . 2 . 3 .
В верхней части окружности наносятся буквенные обозначения
измеряемой величины и функционального признака прибора. В н и ж н е й части
окружности - п о з и ц и о н н о е обозначение, служащее для нумерации комплекта
измерения или регулирования. П о р я д о к расположения буквенных обозначений
в верхней части (слева направо) д о л ж е н быть с л е д у ю щ и м : обозначения
о с н о в н о й измеряемой величины; обозначение, уточняющее (если н е о б х о д и м о )
о с н о в н у ю измеряемую величину; обозначение функционального признака
прибора.
1
4
г
3
Рис.2.3. Условные обозначения приборов и средств автоматизации.
1 - первичный измерительный преобразователь (датчик); прибор, устанавливаемый по месту;
2 - [грибор, устанавливаемый на щите; 3 - регулирующий орган; 4 - исполнительный
механизм.
Измеряемая величина обозначается: D - плотность; Е - любая
электрическая величина; F - расход; G - размер, положение, перемещение; Н ручное воздействие; К - время, временная
программа; L - уровень; М влажность; N - резервная буква; Р - давление; Q - величина, характеризующая
качество, состав, к о н ц е н т р а ц и ю и т.п.; R - радиоактивность; S - скорость,
частота; Т - температура; U - несколько разнородных измеряемых величин; V вязкость; W - масса.
Ф у н к ц и и , в ы п о л н я е м ы е п р и б о р о м , обозначаются с л е д у ю щ и м образом:
А - сигнализация; С - регулирование, управление; I - показание; R регистрация.
При построении о б о з н а ч е н и й комплектов средств автоматизации первая
буква в обозначении к а ж д о г о прибора, входящего в комплект, является
наименованием измеряемой в е л и ч и н ы . Например: ТЕ - измерительный
преобразователь температуры; T R - регистрирующий
прибор; ТС регулирующий блок. Все устройства, выполненные в виде отдельных блоков и
предназначенные д л я р у ч н ы х о п е р а ц и й , д о л ж н ы иметь на первом месте в
обозначении букву Н независимо от того, в состав какого измерительного
комплекта они входят. Н а п р и м е р : Н - кнопки (ключи) для дистанционного
управления; Н С - б а й п а с н ы е панели дистанционного управления; HS переключатели электрических и пневматических линий.
При
обозначении
комплекта, предназначенного
для
измерения
нескольких р а з н о р о д н ы х величин, п е р в и ч н ы е измерительные преобразователи
(датчики) следует обозначать в соответствии с измеряемой величиной,
вторичный п р и б о р - UP. В отдельных случаях при построении обозначений
комплектов, п р е д н а з н а ч е н н ы х для измерения качества косвенным методом,
первая буква в о б о з н а ч е н и и датчика м о ж е т отличаться от первой буквы в
обозначении в т о р и ч н о г о п р и б о р а ( н а п р и м е р , для измерения качества продукта
используется т е м п е р а т у р н ы й метод). Д а т ч и к а м и температуры при этом
являются т е р м о м е т р ы сопротивления, вторичным прибором - автоматический
мост. О б о з н а ч е н и е т а к о г о комплекта при развернутом способе следующее: Т Е датчики; QR - в т о р и ч н ы й прибор.
П р и м е р ы построения функциональных схем автоматизации основного
технологического
оборудования
судовых
энергетических
установок
представлены рисунками 1.1 - 1.17.
2.4. А л г о р и т м и ч е с к а я с т р у к т у р а с и с т е м ы а в т о м а т и з а ц и и и ее с и н т е з
К р о м е к о н с т р у к т и в н ы х структурных схем в проектах автоматизации
д о л ж н ы приводиться структурные алгоритмические схемы А С Р . Структурные
алгоритмические с х е м ы разрабатываются на основе математических моделей
объекта регулирования, представляющие статические и динамические свойства
объекта. Если таковая и н ф о р м а ц и я отсутствует, то следует в эксперименте
получить
временные
или
частотные
характеристики
аналогичных
д е й с т в у ю щ и х технологических установок или агрегатов.
П о д и ф ф е р е н ц и а л ь н ы м уравнениям или графическим характеристикам
п р о е к т и р о в щ и к о м разрабатывается
структурная алгоритмическая схема
объекта а в т о м а т и з а ц и и . В алгоритмической схеме отдельные звенья могут не
иметь ф и з и ч е с к о й целостности, но соединение их по статическим и
динамическим свойствам, по алгоритму функционирования д о л ж н о быть
эквивалентно объекту автоматизации.
Структурную
алгоритмическую
схему
объекта
автоматизации
целесообразно
представлять
простейшими
элементарными
(типовыми)
звеньями, д и н а м и ч е с к и е свойства и аналитические выражения передаточных
функций к о т о р ы х известны. Понятие элементарных типовых
звеньев
автоматических систем регулирования в инженерную практику введено в связи
с тем, что о н о позволяет структурно представить автоматическую систему
любой с л о ж н о с т и в виде набора простейших звеньев, определенным образом
связанных м е ж д у собой. Зная д и н а м и ч е с к и е и статические свойства
элементарных звеньев, их характеристики и передаточные функции, м о ж н о
упростить задачи синтеза и анализа автоматических систем регулирования.
П р и синтезе автоматических систем регулирования
необходимо
в ы п о л н и т ь преобразования структурных схем для у п р о щ е н и я структуры
системы и приведения ее к виду, удобному для определения оптимальных
параметров настройки. При этом, учитывая принцип суперпозиции, п о
каждому из видов воздействий на объект регулирования составляется
соответствующая структурная схема.
Для исключения неопределенности при расчете автоматических
систем регулирования структурную схему представляют в виде блока,
состоящего из регулятора и объекта регулирования. В качестве регулятора
принимается его линейная м о д е л ь со стандартными законами регулирования.
Балластное звено реального регулятора относится к объекту регулирования. В
этом случае реальный объект автоматизации представляется в виде
совокупности звеньев, в число которых входят и с п о л н и т е л ь н ы е механизмы,
усилители, чувствительные элементы, регулирующие о р г а н ы и, собственно,
о б ъ е к т ы регулирования (см. рис. 2.4).
V <s)
p
V <s)
Х2
a
Рис.2.4. Структурная схема автоматической системы.
Таким образом, в расчетах по всем локальным контурам регулирования
определяется передаточная функция реального объекта автоматизации.
Д а л ь н е й ш и й синтез А С Р осуществляется путем определения оптимального
закона регулирования и в ы б о р а автоматического регулятора, наиболее б л и з к о
реализующего этот закон регулирования (выполняется расчет параметров
настройки регулятора).
Глава 3. Статика систем автоматизации
З Л . О б щ е е представление о статических характеристиках звеньев и
систем
С т а т и ч е с к о й характеристикой С А Р называется зависимость значений
регулируемой к о о р д и н а т ы о т нагрузки регулируемого объекта, связанного в
работе с а в т о м а т и ч е с к и м
регулятором. Д л я построения
статической
характеристики С А Р необходимо знать статические характеристики каждого из
элементов, в х о д я щ и х в эту систему.
Статической
характеристикой
звена называется
функциональная
зависимость в ы х о д н о й координаты звена Х
от значений входной координаты
Х в у с т а н о в и в ш и х с я р е ж и м а х работы.
Звенья в системе автоматического регулирования могут быть соединены
последовательно, параллельно л и б о о х в а ч е н ы обратной связью. К а ж д о м у из
соединений соответствует определенное з н а ч е н и е коэффициента передачи или
коэффициента у с и л е н и я . Для с и с т е м ы , состоящей из последовательно
соединенных звеньев, коэффициент передачи равен:
а ы к
м
*.=П*. •
(3-1)
Коэффициент
передачи
системы,
состоящей
соединенных звеньев, определится по у р а в н е н и ю :
из
параллельно
•
(3-2)
Если с и с т е м а охвачена обратной связью, т о коэффициент
системы определится так:
передачи
где
К - к о э ф ф и ц и е н т передачи разомкнутой системы; К«.- к о э ф ф и ц и е н т
передачи звена о б р а т н о й связи.
П л ю с соответствует отрицательной обратной связи, а минус положительной о б р а т н о й связи. К о э ф ф и ц и е н т ы передачи входят в уравнения
статики, п о к о т о р ы м строятся статические характеристики звеньев и систем
АР. Если х а р а к т е р и с т и к а линейная, то K=const (К- коэффициент передачи). Д л я
нелинейных х а р а к т е р и с т и к К зависит о т уровня входной координаты.
Представим замкнутую С А Р в виде двух блоков (см.рис.3.1): объекта
регулирования 1 и регулятора 2. Статическая характеристика регулятора
(рис.3.2) X i = f
( Х ) сама может б ы т ь результирующей
статической
характеристикой
нескольких элементов, составляющих
автоматический
регулятор ( н а п р и м е р , чувствительный, усилительный элементы и др.).
Статические характеристики регулируемых объектов часто строят в виде серии
X = f ( N ) п р и Xj=const, где N - нагрузка
регулируемого объекта. Эти
характеристики показывают изменение регулируемой координаты X : в
р
2
2
зависимости от нагрузки N при выбранном значении входной координаты X ,
которой является, как правило, положение органа управления (см.рнс.3-2).
t
Рис. 3.1. Функциональная схема системы.
Рис. 3.2. П о с т р о е н и е статической характеристики С А Р .
3.2.Статические характеристики з а д а ю щ и х устройств
Потенциометрический датчик
Потенциометрический
д а т ч и к предназначен д л я
преобразования
механического перемещения в электрическую величину в виде напряжения. В
основе принципа действия д а т ч и к а лежит изменение сопротивления при
изменении положения д в и ж к а на потенциометре.
г
и
I
Рис. 3.3. С х е м а потенциометрического датчика.
Н а рис.3.3 показан п о т е н ц и о м е т р и ч е с к и й датчик П с с о п р о т и в л е н и е м R,
нагруженный
сопротивлением
R„. П о т е н ц и о м е т р
представляет
собой
переменное с о п р о т и в л е н и е с непрерывной или секционированной о б м о т к о й . В
п о т е н ц и о м е т р е н е п р е р ы в н о й намотки осуществляется
непосредственный
контакт д в и ж к а и провода, о ч и щ е н н о г о о т изоляции в местах с о п р и к о с н о в е н и я .
В случае с е к ц и о н и р о в а н н о й намотки д в и ж о к скользит по к л е м м а м , к которым
п о д с о е д и н е н ы к о н ц ы секций потенциометра. Н а п р я ж е н и е п и т а н и я \J
п о т е н ц и о м е т р а м о ж е т быть как п о с т о я н н ы м , так и переменным. В ы х о д н о е
н а п р я ж е н и е U снимается с движка.
D
С т а т и ч е с к о й характеристикой потенциометрического д а т ч и к а является
зависимость в ы х о д н о г о напряжения U о т перемещения д в и ж к а X . П р и наличии
нагрузки э т а з а в и с и м о с т ь имеет в и д [10]:
и — ^ - .
1
+
(3.4)
^(1-«>
где сх=Х/1-отношение перемещения д в и ж к а X к длине намотки 1; f H R ^ R отношение
сопротивления
нагрузки
R
к
полному
сопротивлению
п о т е н ц и о м е т р а R.
В с л у ч а е , когда потенциометр не нагружен и сопротивление нагрузки
R =oo ( и д е а л ь н ы й с л у ч а й ) , выходное напряжение, определяемое формулой
(3.4), становится р а в н ы м :
H
H
V =U -a.
(3.5)
На рис.3.5 п о к а з а н ы характеристики 1,2,3, которые построены при
р а з л и ч н ы х с о о т н о ш е н и я х сопротивления нагрузки R
и сопротивления
п о т е н ц и о м е т р а R, т о есть при р=оо ; (1=0,5; р=0,1 соответственно.
H
0
H
В
следящих
системах
автоматического
регулирования
широко
используются
схемы
двухтактных
реверсивных
потенциометрических
датчиков (см.рис.3.4). Потенциометр П1 такого датчика является з а д а ю щ и м и
связан м е х а н и ч е с к и с входной осью с л е д я щ е й системы. П о т е н ц и о м е т р П 2
имеет м е х а н и ч е с к у ю связь с исполнительным устройством. В ы х о д н о е
н а п р я ж е н и е и л и сигнал ошибки, если и м е т ь в виду следящую систему, п о
своему знаку о п р е д е л я е т с я положением д в и ж к о в потенциометров.
R
RH
1к
х+дх
U
П,
П
2
Рис. 3.4. Д в у х т а к т н ы й реверсивный потенциометрический датчик.
В ы х о д н о е н а п р я ж е н и е р а с с м а т р и в а е м ы х схем может б ы т ь определено
на о с н о в а н и и т е о р е м ы об эквивалентном генераторе [10]:
и
,
[2а(\-а)
где
(з.
6 )
+ Аа{\ - 2а - Да) + 0]
Аа=ДХ / /
- о т н о с и т е л ь н о е рассогласование д в и ж к о в
П1 и П 2 ; сс=Х/ I
-
относительное
перемещение
потенциометров
движка
задающего
п о т е н ц и о м е т р а П 1 ; fHRVR- о т н о ш е н и е сопротивления нагрузки R H к полному
с о п р о т и в л е н и ю п о т е н ц и о м е т р а R.
Н а рис.3.6 и з о б р а ж е н ы характеристики, полученные в соответствии с
формулой
(3.6).
Движок
задающего
потенциометра
П1
зафиксирован
в
п о л о ж е н и и с р е д н е й т о ч к и этого п о т е н ц и о м е т р а и, следовательно, а = 0 , 5 , a
о т н о с и т е л ь н о е рассогласование д в и ж к о в Д а м о ж е т меняться в пределах 0,5<Да<0,5. К р и в ы е : 1 A 3 соответствуют р=оо, р = 0 , 5 , р=0,1Трансформаторный датчик
Т р а н с ф о р м а т о р н ы е датчики с в ы х о д н ы м сигналом в виде углового
п е р е м е щ е н и я ч а с т о в ы п о л н я ю т в виде электрических микромашин, известных
под названием " в р а щ а ю щ и е с я т р а н с ф о р м а т о р ы " (ВТ). На статоре и роторе ВТ
р а з м е щ е н ы по д в е взаимно п е р п е н д и к у л я р н ы х обмотки. К о э ф ф и ц и е н т
взаимоиндукции
статорных
и
роторных
обмоток
изменяется
по
с и н у с о и д а л ь н о м у закону в зависимости от угла поворота а. В зависимости от
схемы с о е д и н е н и я о б м о т о к различают синусно- косинусные вращающиеся
т р а н с ф о р м а т о р ы ( С К В Т ) , л и н е й н ы е в р а щ а ю щ и е с я трансформаторы ( Л В Т ) и
масштабные вращающиеся трансформаторы (МВТ).
С х е м а с о е д и н е н и я обмоток С К В Т показана на рис.3.7. Н а п р я ж е н и е
питания U , п о д а н о на о д н у обмотку статора. С роторных обмоток снимаются
два в ы х о д н ы х с и г н а л а U и и , и з м е н я ю щ и е с я соответственно по закону синуса
и косинуса в ф у н к ц и и угла поворота ротора. Для устранения искажений от
токов нагрузки в ы п о л н я ю т операции симметрирования ВТ, заключающиеся в
подборе с о п р о т и в л е н и й R i (первичная симметрия) и R2, R3 (вторичная
симметрия).
2
3
Выходные
напряжения
СКВТ
могут
быть записаны
в
виде:
U = K U | S i n a ; U =K-Ui-cosa. К о э ф ф и ц и е н т пропорциональности К з а в и с и т от
с о о т н о ш е н и я в и т к о в W 2 / W = W / W i и п р и выполнении симметрирования не
зависит от у г л а п о в о р о т а (обычно W = W ) .
2
3
l
3
2
3
С х е м а с о е д и н е н и я обмоток Л В Т показана на рис.3.7. Зависимость
выходного н а п р я ж е н и я U
от у г л а поворота ротора определяется по
уравнению:
К • sin а
(/,=[/,—
.
(3.7)
2
Поворотные
т р а н с ф о р м а т о р ы - это
электрические
микромашины
п е р е м е н н о г о тока, предназначенные для преобразования угла поворота в
напряжение, п р о п о р ц и о н а л ь н о е
некоторым
функциям
угла
(например,
синусу или косинусу угла поворота в С К В Т ) или самому углу поворота
ротора в Л В Т . В системах автоматического регулирования поворотные
трансформаторы
и с п о л ь з у ю т в качестве измерителей
рассогласования,
фиксирующих
отклонение
системы
от
некоторого
определенного
положения.
л
Рис. 3.7. П р и н ц и п и а л ь н ы е схемы С К В Т , Л В Т и М В Т .
1Ь
0,75
•
0,5
j
\ а
0,25
_s a
a
О С
-0,25
/
б
1
—~ж
!—
/
i
-0,5
i
-0,75
i
i
-1
|
-0,75
-0.5
-0,25
Рис. 3.8. С т а т и ч е с к и е
0
0,25
0,5
характеристики TPB.
0,75
H
Синусно-косинусные
трансформаторы
- это
ТРВ, у
которых
выходное н а п р я ж е н и е одной из обмоток пропорционально напряжению
возбуждения и синусу угла поворота ротора, а выходное напряжение
другой о б м о т к и пропорционально н а п р я ж е н и ю возбуждения и косинусу
угла поворота. Статические характеристики С К В Т показаны на р и с . 3.8
(кривые А ) .
Линейные
поворотные
т р а н с ф о р м а т о р ы - это Т Р В , у
которых
выходное н а п р я ж е н и е пропорционально напряжению возбуждения и углу
поворота
ротора. В
качестве
таких
машин
используются
синуснокосинусные п о в о р о т н ы е трансформаторы с коэффициентом т р а н с ф о р м а ц и и
0,565 и о г р а н и ч е н н ы м углом поворота ротора.
Д л я п о л у ч е н и я описанной зависимости применяют д в е схемы
линейных
ТРВ: с
первичным
симметрированием
и
с
вторичным
с и м м е т р и р о в а н и е м . При
первичном
симметрировании
соединяются
последовательно
главная статорная
обмотка
и косинусная
роторная
обмотка. В ы х о д н ы м
напряжением
является
напряжение
на
зажимах
синусной о б м о т к и ротора. При вторичном симметрировании напряжение
возбуждения
подается
на
зажимы
главной
статорной
обмотки.
Квадратурная о б м о т к а статора и синусная обмотка ротора соединяются
последовательно и образуют о б щ у ю цепь, на зажимы которой включено
нагрузочное с о п р о т и в л е н и е . Напряжение, снимаемое с этого сопротивления,
является
выходным
напряжением
линейного
Т Р В . Статическая
характеристика т а к о г о Т Р В показана на рис.3.8 (кривая Б). Статический
к о э ф ф и ц и е н т усиления Л В Т в пределах линейного участка есть величина,
не зависящая о т угла поворота.
М В Т п р и м е н я ю т для согласования масштабов отдельных узлов схем;
в них у г о л п о в о р о т а ротора фиксируется (меняется только при настройке).
3.3. Статические х а р а к т е р и с т и к и регулирующих органов
С т а т и ч е с к и е характеристики регулирующих к л а п а н о в
Регулирующие
органы устанавливаются
на трубопроводах
для
регулирования
расхода
жидкости
и
газов
посредством
изменения
гидравлического сопротивления, зависящего от степени открытия проходного
сечения д р о с с е л ь н о г о устройства.
С гидравлической точки зрения дроссельные регулирующие органы
представляют
собой
сложные
местные
сопротивления,
в
которых
регулируемый поток испытывает сжатие, расширение, поворот и т.п.
С л о ж н о с т ь гидравлического расчета регулирующих органов объясняется тем,
что в п р о ц е с с е регулирования изменяется геометрия дроссельного прохода, и
могут изменяться параметры среды, что часто приводит к изменению р е ж и м а
т е ч е н и я . При этом р е г у л и р у ю щ и й орган д о л ж е н о б е с п е ч и в а т ь заданный в и д
р а с х о д н о й характеристики системы.
Для работы в системах С А Р регулирующие о р г а н ы комплектуются
электрическими, п н е в м а т и ч е с к и м и и гидравлическими
исполнительными
механизмами, к о т о р ы е п е р е м е щ а ю т и у с т а н а в л и в а ю т в
необходимом
п о л о ж е н и и затвор р е г у л и р у ю щ е г о органа. С о в о к у п н о с т ь регулирующего
органа и и с п о л н и т е л ь н о г о механизма принято называть исполнительным
устройством. Последнее часто дополняется позиционером и устройством д л я
ручного или д и с т а н ц и о н н о г о управления [11].
В системах автоматики наиболее широко п р и м е н я ю т с я о д н о с е д е л ь н ы е и
двух седельные р е г у л и р у ю щ и е клапаны и поворотные заслонки.
О с н о в н ы м и п а р а м е т р а м и , характеризующими р е г у л и р у ю щ и й орган,
являются: у с л о в н ы й п р о х о д D - номинальный д и а м е т р входного патрубка
р е г у л и р у ю щ е г о органа; у с л о в н ы й ход S - н о м и н а л ь н о е значение в е л и ч и н ы
полного хода затвора р е г у л и р у ю щ е г о органа; степень о т к р ы т и я I - отношение
т е к у щ е г о значения хода затвора S или угла поворота к условному ходу затвора
S , или к углу поворота, т о есть 1 = S/S = а / а ; пропускная способность K расход
жидкости
(м /час)
с
плотностью
р=1 к г / с м ,
пропускаемый
р е г у л и р у ю щ и м о р г а н о м при перепаде давления на нем 1кгс/см ; условная
пропускная с п о с о б н о с т ь ; Куу - номинальное значение в е л и ч и н ы пропускной
способности при условном ходе затвора; пропускная
характеристика
(внутренняя или "идеальная") -зависимость относительной
пропускной
способности от степени о т к р ы т и я I регулирующего органа [11]:
y
y
y
y
3
у
v
2
:
* =
=
(3-8)
Конструктивная характеристика регулирующего органа выражает
зависимость изменения относительного проходного сечения регулирующего
органа от степени его о т к р ы т и я :
F = - ^ ~ = /(/).
(3.9)
Д р о с с е л ь н ы е у с т р о й с т в а регулирующих
клапанов, как правило,
профилируются и могут иметь л ю б ы е конструктивные характеристики,
приспособленные к к о н к р е т н ы м условиям работы. О б ы ч н о дроссельные
устройства с е р и й н о в ы п у с к а е м ы х регулирующих к л а п а н о в профилируются для
получения л и н е й н о й или равнопроцентной (логарифмической) пропускных
характеристик, которые, как показала практика, могут обеспечить требуемое
качество
регулирования.
Регулирующие
заслонки
относятся
к
непрофилируем ым
регулирующим
органам
и
имеют
пропускные
характеристики, б л и з к и е
к равнопроцентным.
Указанные
пропускные
характеристики о п и с ы в а ю т с я следующими у р а в н е н и я м и :
линейным
о = с,-/ + о ;
0
(3-Ю)
равнопроцентным
o = C e •';
(3.11)
д л я з а с л о н о ч н о г о исполнительного устройства с а = 0 + 60°
(0.56Ч0,5$ Х1-Л -со*а)
~ (0^6 + 5 c o s a X 1 - 0 ^ ) '
где
а
- у г о л поворота заслонки; б = В / D
- отношение д и а м е т р о в
диска затвора и у с л о в н о г о прохода; C i и С
- постоянные к о э ф ф и ц и е н т ы ,
о п р е д е л я е м ы е н а ч а л ь н ы м и условиями; o = K / К.^ начальная
относительная пропускная способность; K
начальная
пропускная
способность, т о есть номинальное значение величины пропускной способности
в момент о т к р ы т и я затвора; n = In 1 / с
- коэффициент пропорциональности.
n
r
д
U
2
д
2
д
y
2
0
v o
v o
0
Рис. 3.9. П р о п у с к н ы е характеристики регулирующих органов.
На рис.3.9 показаны линейная 1 ( п р и о = 0 ) , равнопроцентная 2 ( п р и
а =0-О,ОЗ) п р о п у с к н ы е характеристики регулирующих клапанов и пропускная
характеристика 3 регулирующей заслонки ( о = 1 ) .
0
о
С т а т и ч е с к и е характеристики р е г у л и р у ю щ и х стержней
и основных эффектов реактивности
При эксплуатации я д е р н о г о реактора р е г у л и р у ю щ и е с т е р ж н и вводятся в
реактор
лишь
частично.
Приближенная
зависимость
эффективности
регулирующего стержня от глубины его погружения имеет вид [13]:
p
h
i
2яЛ
.
„
5 т
...
( 3 1 3 )
д=7Г57 1Г'
где
р
- реактивность; h - глубина погружения стержня (от верхнего края
активной зоны); Н
- высота активной зоны.
Статическая характеристика регулирующего стержня показана н а
О
0,2
0,4
0,6
0,8
1
Рис.3.10. Статическая характеристика р е г у л и р у ю щ е г о стержня.
Н а и б о л ь ш е е изменение реактивности приходится на центральную
область активной з о н ы , в которой б о л е е высокий нейтронный поток.
Соответственно при равных перемещениях стержня в центральной или
п е р и ф е р и й н о й о б л а с т я х компенсируемая или в ы с в о б о ж д а е м а я реактивность
будет больше при п е р е м е щ е н и и стержня в центральной области активной
зоны.
При расчетах нейтронно-физических характеристик водо-водяных
реакторов вводятся несколько коэффициентов реактивности, х а р а к т е р и з у ю щ и е
температурные и другие э ф ф е к т ы [13]:
-коэффициент реактивности по температуре теплоносителя K j ;
- к о э ф ф и ц и е н т реактивности по температуре т о п л и в а К ;
2
- м о щ н о с т н о й коэффициент реактивности Кз;
- к о э ф ф и ц и е н т реактивности п о давлению теплоносителя К В
соответствии
с [14,15] м о ж н о
сопоставить
эффективность
м е х а н и ч е с к о й системы регулирования С У З при 285°С, температурного
эффекта п р и 20°-285°С и мощностного эффекта, которые д а ю т соответственно
с л е д у ю щ и е изменения запаса реактивности в процентах: 12,2; 4,5; 1,6.
Учитывая, ч т о температурный и м о щ н о с т н о й эффект отрицательны, запишем
с л е д у ю щ и е п р и б л и ж е н н ы е уравнения этих эффектов:
Рт _ _ 4,5 Q
(3.14)
4
Рп
1 2
2
> ®о
(3.15)
Р „
Л
12.2 X
"
В соответствии с уравнениями (3.14) и (3.15) построены статические
характеристики, показанные на рис.3.11.
PJL- *>L -0.4
Р и с . 3 . 1 1 . Статические характеристики мощностного (1)
и температурного (2) эффектов.
3.4.Статические характеристики усилителей
Электронные усилители
Особенностью
электронных
усилителей
является
их
высокая
чувствительность: они способны усиливать весьма малые входные мощности.
Поэтому п р и м е н е н и е электронных усилителей особенно целесообразно в тех
случаях, когда ч у в с т в и т е л ь н ы е элементы или д а т ч и к и и м е ю т о ч е н ь м а л у ю
в ы х о д н у ю мощность, п о р я д к а нескольких микроватт [16].
Для
примера
рассмотрим
двухкаскадный
полупроводниковый
усилитель, показанный на рис.3.12.
Рис. 3.12. Д в у х к а с к а д н ы й п о л у п р о в о д н и к о в ы й усилитель.
Д л я этой с х е м ы з н а ч е н и я входных сопротивлений первого и второго
каскадов определяются по у р а в н е н и я м :
*„,=<1 ДМ -^^-,
(3.16)
Л«,=(1 + Д)-Л .
0-17)
+
Э1+
М
При R k i « R^,, где i - 1, 2, имеем:
(
* - ' Ь - ' Ъ м г > -
3
-
,
8
)
Так как в р а с с м а т р и в а е м о й схеме р" » 1 , т о :
K
-
M
X ^ " ^ Z '
(
3
,
1
9
)
На практике д л я с х е м ы (рис.3.12) м о ж н о получить значения К^,
и з м е н я ю щ и е с я от 20 д о 300. Следует иметь также в виду, что значение
коэффициента у с и л е н и я К м о ж е т принимать у р о в е н ь и меньший или равный
е д и н и ц е . В ф о р м у л а х (3.17) и (3.18) к о э ф ф и ц и е н т ы усиления т р а н з и с т о р о в
равны
соответственно
pi
и
РгСтатические
характеристики
полупроводникового у с и л и т е л я показаны на рис.3.13.
и
Магнитный усилитель
М а г н и т н ы й усилитель представляет собой устройство, принцип
действия
которого
основан
на использовании
нелинейности
кривой
намагничивания и явления гистерезиса ферромагнитных материалов [17].
На рис.3.14 представлена схема простейшего магнитного усилителя,
состоящего из ферромагнитного сердечника с двумя обмотками: обмоткой
управления с числом витков W и рабочей обмоткой с числом витков W .
В обмотку управления подается сигнал постоянного тока U . Рабочая
обмотка через нагрузку R„ подключена к напряжению переменного тока LL.
При синусоидальном его изменении (LL=U smco- t) величина переменной
составляющей магнитной индукции определится по уравнению [17]:
y
p
y
m
B = B„-sinta+B .
(3.20)
0
Разделим л е в у ю и правую части уравнения (3.20) на ц (магнитная
проницаемость магнитопровода).
в
в, в,
—= —
И=н
я
sine* + — ,
-sinar +
tf .
0
(3.21)
Рис. 3.14. П р о с т е й ш и й магнитный усилитель.
Напряженности м а г н и т н о г о поля определяются у р а в н е н и я м и :
Подставим у р а в н е н и е (3.22) в (3.21):
Принимая /„ = — — ,
/ =
v
а также
полагая,
что
коэффициент
усиления магнитного усилителя равен [18]:
K
= f ~ ^ ,
(3.23)
п о л у ч и м следующую з а в и с и м о с т ь :
/„ = / , + s i n a r .
(3.24)
M
Y
Величина cot меняется в пределах 0 < cot < п , причем пропорционально
и з м е н е н и ю относительной к о о р д и н а т ы 1 :
1 .Г*-/.
у
/
s /
+
s
L |
' ' 7* 4~T *
( 3
-
2 5 )
Т и р и с т о р н ы й усилитель
Т и р и с т о р - п о л у п р о в о д н и к о в ы й прибор, состоящий из четырех
областей, разделенных т р е м я р-п - переходами (рис.3.16) и и м е ю щ и й отводы о т
двух крайних областей и средней р-области (управляющий электрод У Э ) .
Т а к о й прибор иногда н а з ы в а ю т управляемым п е р е к л ю ч а ю щ и м диодом,
т и р и с т о р о м или к р е м н и е в ы м управляемым вентилем. При включении в
а н о д н у ю цепь тиристора нагрузки с активным сопротивлением основной ток,
п р о т е к а ю щ и й от анода к катоду, нарастает практически мгновенно. Д л я
отпирания тиристора н а у п р а в л я ю щ и й электрод надо подать короткий
(длительностью
в
несколько
микросекунд)
управляющий
импульс
п о л о ж и т е л ь н о й (если у п р а в л я ю щ и й вывод электрода сделан от р-базы) или
отрицательной (при выводе от п- базы) полярности.
Рис. 3.15. Статическая характеристика магнитного усилителя.
К
А
Pi
ni
П2
Рг
-0
УЭ
Рис 3.16. Структура тиристора.
Для перевода тиристора из открытого состояния в закрытое необходимо
у м е н ь ш и т ь о с н о в н о й ток до значения, меньшего, чем l (ток удержания). В
цепях п о с т о я н н о г о тока это осуществляется путем пропускания через
v n
о т к р ы т ы й т и р и с т о р короткого импульса обратного тока, п р е в ы ш а ю щ е г о
прямой. Д л я этой цели используется специальное к о м м у т и р у ю щ е е устройство.
Т о к и н а п р я ж е н и е в цепи управления небольшие, а основной т о к м о ж е т
составлять десятки и с о т н и а м п е р при анодных н а п р я ж е н и я х д о нескольких
т ы с я ч вольт. П о э т о м у к о э ф ф и ц и е н т усиления по м о щ н о с т и у т и р и с т о р о в
достигает 10 -10 .
Внешняя х а р а к т е р и с т и к а тиристора м о ж е т б ы т ь построена
на
основании уравнения [ 2 0 ] :
4
5
U =
E-AU-U
(3.26)
v
где
U - основное н а п р я ж е н и е ; A U - падение напряжения в т и р и с т о р е ; Е
- н а п р я ж е н и е питания ( а н о д н о е напряжение); U - н а п р я ж е н и е управления.
Если п р е н е б р е ч ь величиной U , т о у р а в н е н и е статики з а п и ш е м в
с л е д у ю щ е м виде:
y
ивых = !-(иу/К),
(3.27)
где
К
- к о э ф ф и ц и е н т усиления тиристора (его м о ж н о взять в пределах о т
2 д о 20); U , U - б е з р а з м е р н ы е выходное и н а п р я ж е н и е управления.
Статическая х а р а к т е р и с т и к а тиристора представлена н а рис.3.17.
B b l x
y
и
1И
0.8
у—
К=2
0,6
0,4
0.2
0
0
0,2
0,4
0,6
\
0,8
1
Рис. 3.17. Статическая характеристика т и р и с т о р н о г о усилителя.
С т р у й н ы й усилитель
П о принципу действия струйный усилитель основан на преобразовании
энергии давления в кинетическую э н е р г и ю вытекающей из трубки струи и
о б р а т н о м преобразовании кинетической энергии в энергию давления.
На рис.3.18 показано д в у х п р о т о ч н о е струйное реле. Управление струей
рабочей ж и д к о с т и , поступающей в струйную трубку под д а в л е н и е м Р ,
осуществляется поворотом заслонки 2. Вытекающая с б о л ь ш о й скоростью
ж и д к о с т ь из наконечника трубки 1 с м а л ы м диаметром выходного отверстия
направляется в п р и е м н ы е каналы 3 и 4, и м е ю щ и е конусную форму. П о мере
прохождения ж и д к о с т и по р а с ш и р я ю щ и м с я каналам 3 и 4 ее кинетическая
энергия преобразуется в давление Р 1 и Р 2 . Если заслонка занимает нейтральное
п о л о ж е н и е , т о Р [ = Р . Отклонение заслонки от нейтрали в ту или иную сторону
вызывает перераспределение давления в приемных каналах, с о е д и н е н н ы х с
камерами р а б о ч е г о цилиндра гидравлического сервомотора.
0
2
Рис. 3.18. Д в у х п р о т о ч н о е струйное реле.
Статические
характеристики
струйного
усилителя
могут
быть
о п р е д е л е н ы н а основании с л е д у ю щ и х соображений. Расходы воды в каждом
приемном канале равны:
G, = G/2 (1 + h),
(3.28)
G = G/2(l+h),
(3.29)
где
G
- о б щ и й расход в о д ы через струйную трубку; h = С о ­
относительная п л о щ а д ь сечения п р и е м н о г о канала; f площадь
сечения
приемного канала.
С к о р о с т ь течения рабочей в о д ы :
2
0
v,=y-=£rV+h),
Jo
/o
(3.30)
z
£(!-*>•
Д а в л е н и я в приемных каналах равны:
(3.31)
На основании уравнений
относительного перепада давлений:
(3.32)
и
(3.33)
определим
значение
(3-34)
О п р е д е л и м зависимость относительной площади сечения приемного
канала от текущего параметра. П л о ш а д ь сечения f (см. рис.3.18) равна п л о щ а д и
сегмента S , которая в с в о ю очередь зависит о т площади сектора S и п л о щ а д и
треугольника S :
лг п
.
лг п r sin2a
(3.35)
cr
c
r
где п - длина дуги в градусах; f = лг.
sin2a
sin л--(-А)
0
— п—
(3.36)
2л2л
Построим статическую характеристику усилителя по уравнению (3.36).
P =h =
360
п!
У j
о6 !1
/ Ij
7
О
г I1
0,5
н\
i1 ;•
11 .
1 : ^
-h
/ i
'
2
3 \
6 7
г
9
i
i
L.
-0,5
a.
-1
-(
-0,75
-0,5
-0,25
0
0,25
0,5
0,75
Рис. 3.19. Статическая характеристика струйного усилителя.
I
3.5. И с п о л н и т е л ь н ы е механизмы
А с и н х р о н н ы й двигатель
П р и н ц и п и а л ь н о возможны с л е д у ю щ и е способы регулирования частоты
вращения а с и н х р о н н ы х двигателей: изменением скольжения
S
путем
включения в ц е п ь ротора реостата или изменением напряжения питания;
изменением ч и с л а пар полюсов Р путем соответствующего переключения
обмотки статора; изменением частоты источника питания / .
я
Р а с с м о т р и м регулирование изменением напряжения питания. О н о
п р и е м л е м о д л я двигателей с большим сопротивлением роторной цепи (то есть
с б о л ь ш и м к р и т и ч е с к и м скольжением), так как у двигателей нормального
исполнения с и з м е н е н и е м напряжения критическое скольжение, о п р е д е л я ю щ е е
зону у с т о й ч и в о й р а б о т ы двигателя, остается практически неизменным и
малым: 5^=0,1-^0,2. У двигателей с б о л ь ш и м сопротивлением цепи ротора
5 с у щ е с т в е н н о б о л ь ш е и максимальный м о м е н т двигателя смещается в зону,
ф
близкую
к
5 = 1, что обеспечивает
заданном м
с
1
большой
и и з м е н е н и и напряжения питания.
диапазон
изменения
S при
Величина с к о л ь ж е н и я есть функция частоты вращения [20]:
S =^
.
(3.37)
Зависимость т е к у щ е г о
определяется уравнением:
М=
,
2 М п а х
момента
н а валу двигателя
от
, .
скольжения
(3.38)
В то же время значение текущего момента определяется
н а п р я ж е н и я питания по ф о р м у л е :
величиной
{
з
-
з
9
)
Если в качестве исполнительных электродвигателей стержней А Р
я д е р н ы х реакторов используется трехфазный а с и н х р о н н ы й двигатель, т о
регулирование скорости осуществляется путем изменения подводимого к
о б м о т к е Э Д (электродвигателя) напряжения с п о м о щ ь ю магнитных усилителей
[19].
Характеристики трехфазного А Д (асинхронного двигателя) несколько
отличаются от характеристик двухфазного А Д , управляемого изменением
напряжения одной из фаз. Управление частотой в р а щ е н и я трехфазного А Д с
короткозамкнутым р о т о р о м осуществляется изменением напряжения на д в у х
фазах. Если п р и н я т ь для трехфазного у п р а в л я е м о г о А Д в качестве
коэффициента у п р а в л я ю щ е г о сигнала отношение напряжения питания л ю б о й
из управляемых фаз к номинальному значению напряжения е = и/и ,
то в
относительных единицах его механические и р е г у л и р о в о ч н ы е характеристики
определяются уравнением [ 1 9 ] :
н
1
m = E (\-v)
(3.40)
i
где m-MjMj
- о т н о ш е н и е момента, развиваемого Э Д , к пусковому моменту;
£ = (//С/ - к о э ф ф и ц и е н т у п р а в л я ю щ е г о сигнала; v = iajco - отношение частоты
0
u
в р а щ е н и я Д и частоты вращения идеального холостого хода. Допустим, что
т = 0,1-s-0,2. Построим статическую характеристику А Д по уравнению (3.40)
(см. рис. 3.20).
Шаговый двигатель
Шаговыми
двигателями
( Ш Д ) называются
электромеханические
устройства, которые преобразуют электрические импульсы напряжения
управления в д и с к р е т н ы е угловые или л и н е й н ы е перемещения ротора с
возможной фиксацией его в нужном положении.
Поскольку Ш Д питаются д и с к р е т н ы м и импульсами напряжения, шаг у
таких
двигателей
строго
фиксирован.
Размер
шага
определяется
конструктивным исполнением двигателя и схемой коммутации его обмоток.
Р а з л и ч а ю т несколько р е ж и м о в работы Ш Д . Статический режим
(тормозной р е ж и м ) , при котором по одной или двум обмоткам статора
протекает п о с т о я н н ы й т о к , с о з д а ю щ и й н е п о д в и ж н о е в пространстве поле, и
ротор
ШД
не
вращается
(регулирующий
орган не
перемещается).
Квазистатический режим - режим п е р е м е щ е н и я единичными шагами, при
котором п е р е х о д н ы е процессы к началу следующего шага полностью
заканчиваются и скорость ротора в начале следующего шага равна нулю.
У с т а н о в и в ш и й с я режим - р е ж и м , соответствующий постоянной частоте
следования импульсов. Ротор в этом р е ж и м е имеет постоянную среднюю
частоту в р а щ е н и я .
f
О
0,2
0,4
0.6
0.8
1
Рис. 3.21. Статическая характеристика шагового двигателя.
Статическая характеристика Ш Д линейна и может быть представлена
следующим уравнением:
« =*•/..
(3.4J)
где ш-относительная частота вращения; /„-относительная частота следования
у п р а в л я ю щ и х импульсов; К = 1.
Гидравлический сервомотор
Гидравлические
и
пневматические
исполнительные
элементы
используют статическую э н е р г и ю жидкости или воздуха, находящихся п о д
давлением, т о есть это с и л о в ы е элементы, п р е о б р а з у ю щ и е энергию потока
жидкости или воздуха (газа) в механическую э н е р г и ю перемещения п о р ш н я ,
поворота лопасти и л и вращения выходного вала. Гидравлические и
пневматические д в и г а т е л и просты по конструкции, н а д е ж н ы , д о л г о в е ч н ы ,
обладают б о л ь ш и м т я г о в ы м усилием [23].
Статические и д и н а м и ч е с к и е свойства рассматриваемых
можно проследить на п р и м е р е наиболее распространенного
двигателя двустороннего действия (см.рис.3.22).
механизмов
поршневого
Pi
Pz
Рис. 3.22. П о р ш н е в о й двигатель двухстороннего действия.
Если не у ч и т ы в а т ь массу п о д в и ж н ы х частей и основываться н а
уравнении с п л о ш н о с т и и неразрывности струи рабочей с р е д ы , поступающей от
усилительного э л е м е н т а в двигатель, т о можно считать, что количество
рабочей ж и д к о с т и , п о с т у п а ю щ е е к двигателю в единицу времени, р а в н о
объему, освобождаемому п о р ш н е м за это время, т о есть:
dm
(3-42)
vf = Fdt '
где
v - скорость
потока жидкости;
/ - площадь
сечения, через
которое
поступает жидкость; F - п л о щ а д ь поршня двигателя; dmjdi - скорость хода
поршня.
Скорость потока ж и д к о с т и определяется по ф о р м у л е [23]:
v = a-4ty,
где
а-
(3-43)
к о э ф ф и ц и е н т пропорциональности;
р=р^-р 2
перепад давления в
полостях.
Статическая х а р а к т е р и с т и к а представляет собой в ы р а ж е н и е :
dm _v
dt
f _a-4&P-f
F
(3.44)
Такая статическая характеристика показана н а р и с . 3 . 2 3 .
50
Гидравлический сервомотор - и н т е г р и р у ю щ е е звено. Д л я него
характерен график, п о к а з а н н ы й на рис.3.23. О д н а к о для построения
статической характеристики системы, содержащей и н т е г р и р у ю щ и е звенья,
следует
использовать
характеристики,
определяющие
установившееся
состояние звена или с и с т е м ы . В этом случае для интегрирующего звена сервомотора следует использовать характеристики, представленные на
рис.3.25.
При использовании г р а ф и к о в (рис.3.24) выбирается одна из показанных
п р я м ы х в зависимости от уровня входного сигнала. С л е д у е т т а к ж е обратить
в н и м а н и е на т о обстоятельство, что для реального и н т е г р и р у ю щ е г о звена
м о ж е т быть построена т о л ь к о характеристика зависимости скорости выходного
параметра в функции о т входной величины, а график, и з о б р а ж е н н ы й на
рис.3.24, в идеале о т р а ж а е т т о т факт, что л ю б о е изменение входного параметра
д л я интегрирующего звена изменяет выходной параметр д о максимального.
3.6. С т а т и ч е с к и е х а р а к т е р и с т и к и о б ъ е к т о в р е г у л и р о в а н и я
Э л е м е н т кинетики ядерного р е а к т о р а
Температура активной зоны изменяется при пусках и остановках
реактора, а также при п е р е х о д н ы х режимах р а б о т а ю щ е г о реактора. И з м е н е н и е
температуры оказывает влияние на величину к о э ф ф и ц и е н т а размножения
нейтронов (реактивность).
Знание зависимости реактивности то температуры важно в связи с
устойчивостью р а б о т ы реактора на заданной м о щ н о с т и и при расчетах
и м е ю щ е г о с я запаса реактивности.
В л и я н и е т е м п е р а т у р ы на реактивность о ц е н и в а ю т т е м п е р а т у р н ы м
к о э ф ф и ц и е н т о м и т е м п е р а т у р н ы м эффектом. Т е м п е р а т у р н ы м коэффициентом
реактивности н а з ы в а ю т изменение реактивности ( к о э ф ф и ц и е н т а размножения
нейтронов) при изменении температуры на о д и н градус, а т е м п е р а т у р н ы м
э ф ф е к т о м реактивности - изменение реактивности с рассматриваемом
интервале.
П о д статической характеристикой элемента кинетики Я Р понимается
графическая зависимость плотности нейтронного потока п ( м о щ н о с т и ЯР) в
ф у н к ц и и от нагрузки. И з м е н е н и е величины нагрузки определяется изменением
р а с х о д а пара на Г Т З А , что приводит к изменению температуры теплоносителя
первого контура и соответственно реактивности. Реактор по о т н о ш е н и ю к
реактивности
является
интегрирующим
звеном,
поэтому
статическая
характеристика Э К Я Р (элемента кинетики ядерного реактора) м о ж е т б ы т ь
показана в виде рис.3.25. П р и использовании г р а ф и к а выбирается одна из
представленных п р я м ы х в зависимости от уровня входного сигнала.
Тепловая система ядерного реактора
В ы д е л и м реактор из Я П П У и будем его рассматривать как отдельный
у п р а в л я е м ы й объект. В х о д н ы м и величинами реактора на эксплуатационных
р е ж и м а х его работы являются: плотность нейтронного потока п, температура
теплоносителя на входе в реактор и р а с х о д теплоносителя G. Изменения этих
величин в ы з ы в а ю т изменение р е ж и м а работы реактора. Выходной величиной
реактора будет температура теплоносителя на выходе из него 9 .
г
Статическая
зависимость
6>, = /(«,#, ,G)
может
быть
получена
из
уравнения теплового баланса реактора на установившемся режиме его работы
[24]:
Kp-nrj^Gcie^),
где
(3.45)
tj - к о э ф ф и ц и е н т удержания т е п л а в реакторе; с - средняя теплоемкость
p
теплоносителя;
К-
постоянная
р
активной
зоны,
зависящая
от
объема,
к о н ц е н т р а ц и и и ядерных характеристик горючего.
С т а т и ч е с к о й характеристикой подвода энергии к реактору называется
зависимость Q,. = / ( © . ) количества т е п л о т ы Q , передаваемой теплоносителю
а
P
в единицу времени от средней т е м п е р а т у р ы { & ) теплоносителя. Зависимость
С Р
Qp = /(©«•) находится из уравнения теплоотдачи:
e,=a-F-(e -e„),
(3.46)
r
где
а
-средний
по
реактору
коэффициент
теплоотдачи
от
ТВЭЛ
к
т е п л о н о с и т е л ю ; F -поверхность теплообмена ТВЭЛ; ® -средняя температура
т
ТВЭЛ.
Статическая
характеристика отвода энергии от реактора
Q r
/(© )
(Т
представляет собой зависимость количества отводимой теплоты в единицу
времени о т средней температуры теплоносителя.
З а единицу времени теплоноситель в реакторе воспринимает количество
теплоты, равное:
Q =Gc{Q -e,).
T
(3.47)
2
С учетом того, что © ^ = ( 0 , +& )/2,
2
формулу (3.47) м о ж н о представить
так:
Q = 2G-c (&,„-&,).
(3.48)
6
П р о д и ф ф е р е н ц и р у е м уравнение (3.48) и запишем его в приращениях:
Д 0 =2G с Д 0 - 2 С с Д 0 , .
(3.49)
Г
с р
П р и м е м значения параметров в (3.47) за номинальные, поделим (3.49) на
(3.47):
i . ^ - * * - . - ^ .
2 Q
0,-0,
0 -0,
T
3
(3.50)
'
V
Обозначим о т н о с и т е л ь н ы е координаты:
(3.51)
0.8
0,6
0,4
0,2
0,2
0,4
0,6
0,8
Рис. 3.25. Статические характеристики Э К Я Р .
С учетом (3.51) з а п и ш е м уравнение (3.50):
В = 0,5А + а.
(3.52)
Уравнение (3.5 2) является уравнением статики тепловой с и с т е м ы
ядерного реактора, где выходной величиной является относительная средняя
температура В, а в х о д н о й величиной относительная тепловая нагрузка А.
Реактор о б л а д а е т семейством характеристик B-f
(А), каждая из
которых соответствует определенному з н а ч е н и ю т е м п е р а т у р ы теплоносителя
на входе в р е а к т о р . Изменение относительной температуры является
следствием у п р а в л я ю щ е г о воздействия на реактор с о с т о р о н ы парогенератора
при изменении через него расхода питательной в о д ы .
На рис.3.26 п р е д с т а в л е н ы статические характеристики тепловой системы
ядерного реактора, п о с т р о е н н ы е при значениях: а = 0,5; а = 0,4; а = 0,2 по
у р а в н е н и ю (3.52).
У р а в н е н и е (3.52) является уравнением статики тепловой системы
ядерного реактора, где выходной величиной является относительная средняя
температура В , а входной величиной относительная тепловая нагрузка А.
Реактор обладает семейством характеристик в = f (А), каждая из
которых соответствует определенному значению температуры теплоносителя
на входе в реактор. Изменение относительной температуры является
следствием у п р а в л я ю щ е г о воздействия н а реактор со стороны парогенератора
при и з м е н е н и и через него расхода питательной воды.
На рис.3.26 представлены статические характеристики тепловой
системы
ядерного
реактора,
построенные
при
значениях:
а = 0,5; а = 0,4; а = 0,2 по уравнению (3.52).
В
аз Л ,
Г Р2
0.8
Г
0,6
0,4
0,2
0
0,2
0,4
0,6
0,8
I
Рис. 3.26. Статическая характеристика тепловой системы Я Р .
Для определения уравнения статики по входному воздействию, запишем
у р а в н е н и е (3.46) в приращениях:
AQ =a
F AQ -a
P
:
Примем
F- A&
CF
.
(3.53)
за номинальную
величину
0 и 0 . Р а з н о с т ь температур ( в - 0
виде:
© - е =(в -в,)/2.
С Т
Г
г
г
№
=
Г Р
(0, - 0 , )
изменения
температур
) в среднем может быть представлена в
(3.54)
С учетом (3.50), п о д е л и м (3.53) на (3.46):
^
2
Q
PH
_ ^ _ _ £ = _ .
0 , - е , ©,-©,
2
{ 3
.
5 5 )
Обозначим о т н о с и т е л ь н ы е координаты:
С учетом (3.56),запишем уравнение (3.55):
А =/?-0,5Я,
(3.57)
Уравнение (3.57) является уравнением статики т е п л о в о й с и с т е м ы
ядерного реактора п о входному воздействию. Характеристики представлены н а
рис.3.26, где /7 = 1; /? = 0,8; /? = 0,6. Э т о статические характеристики п о д в о д а
энергии. О н и у б ы в а ю щ и е . Реактор обладает семейством т а к и х характеристик.
Каждая и з них соответствует определенному у р о в н ю м о щ н о с т и реактора.
Статические характеристики турбоагрегата
При работе т у р б и н ы п р о и с х о д и т аккумулирование кинетической э н е р г и и
р о т о р о м и с в я з а н н ы м и с ним в р а щ а ю щ и м и с я частями (прежде всего
редуктором), Если п р и в е д е н н ы й к валу т у р б и н ы м о м е н т инерции этих частей
обозначить через / , а частоту вращения через, т о в соответствии с т е о р е м о й о
моменте количества д в и ж е н и я м о ж н о записать [25]:
Т
~ ^ '
где М ,М -соответственно
д в и ж у щ и й момент, развиваемый паром на
лопатках т у р б и н ы , и м о м е н т сопротивления со с т о р о н ы гребного винта.
В установившемся режиме:
7
=
Д
Л
/
л
( 3
5 8 )
С
М -М =0.
ло
(3.59)
со
В ы р а ж е н и е для д в и ж у щ е г о момента, как э т о следует из общей теории
паровых т у р б и н , м о ж е т б ы т ь представлено в с л е д у ю щ е й форме:
М =а-Н
я
DЛ,
(3.60)
где
а- к о э ф ф и ц и е н т п р о п о р ц и о н а л ь н о с т и ; Н- изоэнтропный перепад;
массовый р а с х о д пара н а турбину;
- внутренний К П Д т у р б и н ы .
D-
П а р а м е т р ы п а р а на входе в турбину п о д д е р ж и в а ю т с я п о с т о я н н ы м и
автоматически, т а к ж е п о с т о я н н ы м о б ы ч н о п о д д е р ж и в а ю т и д а в л е н и е в
конденсаторе, которое определяется температурой забортной воды. П о э т о м у
н = const. Н е и з м е н н ы м м о ж н о считать т а к ж е значение внутреннего К П Д
т у р б и н ы . Т а к и м о б р а з о м , д в и ж у щ и й момент т у р б и н ы представляется ф у н к ц и е й
двух переменных:
М =А~.
АА
со
(3.61)
З а п и ш е м уравнение (3.61) в относительных величинах:
( з и )
--£/-£-•
Полагая
М jM
A
турбоагрегата
= const ,
Ao
(подвода
строим
энергии). Каждая
о п р е д е л е н н о м у з н а ч е н и ю М /М
А
Ао
статическую
характеристику
из характеристик
соответствует
(см.рис.3.27).
М о м е н т сопротивления гребного винта, с о с т о я н и е поверхности которого
удовлетворительно, а глубина погружения неизменна,
пропорционален
квадрату скорости с у д н а или квадрату частоты вращения гребного вала.
Изменения
сопротивления,
вызванные
увеличением
шероховатости
поверхности, и з м е н е н и е м глубины погружения с т у п и ц ы винта, ш т о р м о в ы м и
условиями и т а к д а л е е , приводят к отклонению о т этой закономерности и в
общем случае отражаются ф о р м у л о й :
М = В L а>\
В - к о э ф ф и ц и е н т пропорциональности; /. -нагрузка н а винт.
(3.63)
С
где
Приведем у р а в н е н и е (3.63) к безразмерному виду:
-•ШЧтПолагая
(зб4)
~ const,
строим статические характеристики турбоагрегата
(отвод энергии). К а ж д а я из характеристик
з н а ч е н и ю LjL^= const (см.рис.3.28).
соответствует
определенному
С т а т и ч е с к и е характеристики конденсатора
Г л а в н ы й конденсатор м о ж н о представить как одноемкостный объект, к
которому через к л а п а н ы соответственно подводится или отводится вода.
В установившемся состоянии подвод в о д ы G в зависимости о т
п о л о ж е н и я у р о в н я h в конденсатосборнике определится уравнением [26]:
G = F $ l2g {H -h),
l
где
y
P
(3.65)
l
F,- п л о щ а д ь п р о х о д н о г о сечения ходового клапана;
£(
коэффициент
расхода; g -ускорение с в о б о д н о г о падения; р - плотность воды; и, - постоянное
положение
уровня
перед
клапаном,
соответствующее
определенному
давлению.
О т в о д воды определим п о уравнению:
G =F
2
2
Zfcg
р h,
где F-проходное
сечение клапана РУК.
П р и в е д е м у р а в н е н и я (3.65) и (3.66) к безразмерному виду:
(3.66)
(3.68)
h
H
0
0.8
0,6
0,4
0,2
g,.g\
G *O
0
0
0,2
0,4
0,6
c
\
0,8
Р и с . 3.29. Статические характеристики конденсатора.
П о у р а в н е н и я м (3.67) и (3.68) построим статические характеристики
конденсатора
(характеристики
подвода
и
отвода
рабочей
среды).
Характеристики
возрастающие
соответствуют
отводу
рабочей
среды,
с п а д а ю щ и е - подводу воды. К а ж д а я кривая соответствует определенному
з н а ч е н и ю о т н о с и т е л ь н о г о открытия клапана подвода или отвода в о д ы .
С т а т и ч е с к а я характеристика парогенератора
П а р о г е н е р а т о р м о ж н о считать рекуперативным т е п л о о б м е н н и к о м т и п а
"труба в т р у б е " , где т е п л о о т теплоносителя первого контура через
р а з д е л я ю щ у ю стенку передается т е п л о н о с и т е л ю второго контура.
Для П Г м о ж н о составить с л е д у ю щ и е уравнения теплового баланса:
2G,
-/,,)=
2
0
^
,
0
^
(
3
.
6
9
)
где С, с. t , i -расход, т е п л о е м к о с т ь , средняя температура теплоносителя,
температура теплоносителя на выходе из ПГ (по первому контуру) и н а входе в
П Г (по второму контуру) соответственно. Индекс 1 относится к первому
контуру, индекс 2 - к о второму.
Приведем у р а в н е н и е (3.69) к безразмерному виду:
lf
(3.70)
= 0;
Полагая, что
'ерш
= А, а т а к ж е , что относительный
'i
расход по т е п л о н о с и т е л ю первого контура не меняется, а по второму контуру
остается постоянной р а з н о с т ь температур, уравнение (3.70) запишем:
Q = G + A.
(3.71)
Это
уравнение
статики
ПГ
по
возмущению.
Статические
характеристики П Г представлены на рис.3.31, где каждой кривой соответствует
определенное з н а ч е н и е коэффициента А.
/
0
0.8
/
0,6
А=0
/
0,4
0,2
/
0
G
0,2
0,4
0,6
0,8
1
Рис.З.ЗО. С т а т и ч е с к и е характеристики ПГ по в о з м у щ е н и ю .
С т а т и ч е с к и е характеристики т е п л о о б м е н н и к а (маслоохладителя)
С и с т е м а автоматического регулирования температуры масла д о л ж н а
п о д д е р ж и в а т ь з а д а н н ы й температурный уровень масла, поступающего к
д в и г а т е л ю ( Г Т З А ) из системы циркуляционной смазки. В ы б о р температуры на
входе в качестве регулируемого параметра обеспечивает подачу в двигатель
масла н е о б х о д и м о й вязкости и соответствует требованиям ГОСТа. Объектом
регулирования в д а н н о м случае будет служить только теплообменник, так как
свойства двигателя и все процессы т е п л о о б м е н а в двигателе непосредственно
не с к а з ы в а ю т с я на величине регулируемого параметра [29].
С т о р о н у подвода т е п л а к объекту представляет тепловой
п о с т у п а ю щ и й в т е п л о о б м е н н и к с н а г р е т ы м маслом из двигателя:
G,-(г,-ij.
Сторону
отвода
поток,
(3.72)
тепла
в
объекте
представляет
количество
тепла,
в о с п р и н и м а е м о г о и уносимого о х л а ж д а ю щ е й водой:
ff«=C .G-k-r,),
(3.73)
2
В ф о р м у л а х (3.72) и (3.73) п р и н я т ы следующие обозначения:
т е п л о е м к о с т и масла и воды; G,, С,-расход
с,,С,-
масла и воды; г , - т е м п е р а т у р а воды
на входе и н а выходе из т е п л о о б м е н н и к а ; / , , / -температура масла на входе и
я
на в ы х о д е из теплообменника.
Qn; Qo
i
01=0
0 = 1
2
0.8
У©1=о
0,6
0,4
0,2
0 ; ©в
М
0
0,2
0,4
0,6
0,8
1
Рис. 3.31. Статические характеристики теплообменника.
Приведем формулы (3.72) и (3.73) к безразмерному виду:
Q. = 0 , - 0 ,
&=(7-(0.-0,).
М
П о уравнениям (3.74) и (3.75) построим статические
объекта управления (см. р и с . 3.31).
(3.74)
(3.75)
характеристики
3.7. С т а т и ч е с к и е х а р а к т е р и с т и к и ч у в с т в и т е л ь н ы х э л е м е н т о в
и обратных связей
В качестве чувствительных основных элементов в системах управления
С Э У используются с л е д у ю щ и е устройства: ионизационные камеры д л я
контроля нейтронного потока; термопары и термосопротивления для
измерения температур теплоносителей, рабочих тел и агрегатов С Э У ;
и м п е л л е р ы и тахометры для контроля частоты вращения; м е м б р а н ы и
с и л ь ф о н ы для контроля уровня и давлений.
Статические характеристики перечисленных элементов практически
л и н е й н ы и могут быть представлены единой обобщенной статической
безразмерной характеристикой, показанной на рис.3.32.
Y
О
0,2
0,4
0.6
0,8
1
Рис. 3.33. Статическая характеристика чувствительных элементов
контроля параметров: п, со, Р,И,Т.
О с о б ы й в и д имеет статическая характеристика
показана н а р и с . 3 . 3 3 , построенная по у р а в н е н и ю [30]:
импеллера,
2
Ар = аса ,
которая
(3.76)
=
(3.77)
АРо
На рис.3.32 входная координата X , а выходная координата Y и приняты
с л е д у ю щ и е обозначения:
«-плотность
нейтронного потока;
<w-частота
вращения; / ' - д а в л е н и е ; Я - у р о в е н ь ;
Т-температура.
Рис. 3.33. Статическая характеристика импеллера.
Статические х а р а к т е р и с т и к и обратных связей
Д л я стабилизации и коррекции С А Р С Э У используются главные и
в с п о м о г а т е л ь н ы е о б р а т н ы е связи, к о т о р ы е могут быть либо жесткими, л и б о
гибкими
(изодромными)
обратными
связями. Жесткие
механические
( к и н е м а т и ч е с к о г о , л и б о силового типа), гидравлические и электрические О С
имеют л и н е й н у ю
статическую
характеристику
(см.рис.3.34),
крутизна
характеристики м о ж е т меняться и, как правило, устанавливается при настройке
регуляторов, л и б о в целом системы.
И з о д р о м н ы е исчезающие о б р а т н ы е связи не имеют статической
характеристики, так как производная постоянной величины равна нулю.
Изодромная исчезающая обратная связь имеет характеристику, аналогичную
рис.3.34.
Безразмерное у р а в н е н и е статики имеет вид:
М =К L .
(3.78)
В
соответствии
с
этим
уравнением
построены
статические
характеристики о с н о в н ы х обратных связей, применяемых в системах
автоматического регулирования технологических процессов и установок ( с м .
рис. 3.34).
m
К>1
/
0.8
/
К=1
0.6
К<1
0,4
0.2
0
0
0,2
0,4
0,6
0,8
1
Рис. 3.34. Статические характеристики обратных связей.
Г л а в а 4. Д и н а м и к а с и с т е м а в т о м а т и з а ц и и
4.1. Д и н а м и ч е с к и е характеристики объектов у п р а в л е н и я
П е р е д а т о ч н а я функция э л е м е н т а кинетики ядерного реактора
При исследовании и расчете систем автоматического управления
м о щ н о с т ь ю я д е р н о й энергетической установки исходят из математического
описания п р о и с х о д я щ и х в них физических процессов. Э т о описание
выполняется в виде системы дифференциальных уравнений, в ы р а ж а ю щ и х
связи между п е р е м е н н ы м и величинами и их производными. Ввиду большой
трудоемкости аналитическое решение такой системы уравнений практически
н е о с у щ е с т в и м о и выполняется методами математического моделирования либо
численного интегрирования на П Э В М . Такой подход является общим и
приемлем в о всех случаях [15].
Д л я л и н е й н ы х систем (а также и нелинейных, но в которых допустима
линеаризация)
широко
применяется
и другой способ, связанный
с
использованием операторного метода. П р и этом способе исследования система
разделяется на звенья направленного действия. Совокупность этих звеньев с
л и н и я м и с в я з и между ними, характеризующими их взаимодействие, образует
структурную схему системы управления. После составления структурной
схемы и п о л у ч е н и я передаточных функций звеньев, входящих в нее, можно
о п р е д е л и т ь передаточную функцию всей системы.
Я д е р н ы й реактор - элемент с резко выраженной нелинейностью, это
является следствием т о г о , что между положением регулирующего стержня
(возмущением р) и плотностью нейтронов (п) нет прямо пропорциональной
зависимости. Б о л е е того, в стационарном состоянии различные мощности
реактора и м е ю т место при одном и т о м ж е положении регулирующего
стержня, а к о э ф ф и ц и е н т усиления реактора dn/dp возрастает с увеличением
уровня м о щ н о с т и .
Э л е м е н т кинетики ядерного реактора (ЭКЯР) описывается с л е д у ю щ и м и
д и ф ф е р е н ц и а л ь н ы м и уравнениями [24].
J
'
<4.1),(4.2)
У р а в н е н и е (4.1) - уравнение плотности нейтронов; уравнение (4.2) у р а в н е н и е к о н ц е н т р а ц и и с , ядер - излучателей запаздывающих нейтронов i - й
группы. В ф о р м у л а х (4.1) и (4.2): / * - среднее эффективное время жизни
з а п а з д ы в а ю щ и х нейтронов; р - доля запаздывающих нейтронов; X постоянная р а с п а д а осколков деления источников запаздывающих нейтронов;
i - время.
Представим уравнения (4.1) и (4.2) в виде:
(4.3),(4.4)
6
6 dC.
Х-Л
6 ,
„
Подставим у р а в н е н и е (4.4) в (4.3), получим:
г
/*
d C . f i .
d т
I*
(
-t]
(4.5),(4.6)
d г '
'
'
Д л я л и н е а р и з а ц и и уравнений (4.5),(4.6) применим м е т о д линеаризации
В ы ш н е г р а д с к о г о И.А. ( м е т о д малых отклонений).
л-
+ Д л,
(4.7)
/7 = 0 + Д / 7 .
где Дл, ДС,, Ар - п р и р а щ е н и я переменных.
Подставим (4.7) в (4.5) и (4.6):
dr
/*
и
I*
Р
'
(4.8),(4.9)
rfAC в.
в.
—dr— ^"=/ ^*- л 0+ ^/ - Д л - Л С - -Л.ДС..
Т
Л
Запишем у р а в н е н и е статики:
(4Л0)
н„ - * С . = 0
:
Вычтем из уравнения движения (4.9) уравнение статики (4.10) и,
пренебрегая величиной (ли-А/?)//* как малой второго порядка, получим:
dAn_ 'lSL.A =
p
6
dАС
f
(4.11),(4.12)
dr
I*
'
'
Применим к у р а в н е н и я м (4.11) и (4.12) преобразование Лапласа:
1
(4.13),(4.14)
i'=l
5ДС.(£)=^Д (5)-Л.ДС.(£).
П
Преобразуем уравнение (4.14) к виду:
я,(^5
+ 1)ЛС j(S)=ji-
An(S),
(4.15)
Подставим уравнение (4.15) в (4.13), получим:
Р.
•An{S)
— S + 1
А.
i'X.
Дп(5) = у*-Др(5).
"' — S + I
я.
О т с ю д а передаточная функция элемента кинетики Я Р будет иметь вид:
An(S)
njt*
" W ^ ) =
(4.16)
A
MS)
5- 1+ Z-
~i 1
•5 + 1
или
»WS) =
I +I-
где
^
к. = -Bj— , T . = — .
'
A, • / *
A ,
С учетом одногрупповой методики расчета
упростится и м о ж е т быть представлена в виде:
f.s
I
+
*
t;-s + i
/'•(1 + X , ) - S
,
(
т, 5+1
Г,
1 + /:,
передаточная
D (т, -5 + 1)
5 (Г,.5 + 1)'
функция
где
D=
7", =
/"•(l + ZC,)
1
1+АГ,
'
Структурную схему Э К Я Р можно представить в виде последовательно
соединенных звеньев: интегрирующего и системы, охваченной отрицательной
обратной связью (см. рис.4.1).
K,/(T,S+1)
K*/(T S+1)
6
Рис.4.1.Структурная схема Э К Я Р .
Структурная с х е м а Э К Я Р по одногрупповой м е т о д и к е расчета выглядит
с л е д у ю щ и м образом:
An(S)
Ap(S)
no/(l*S)
I
K,/(T,S+l)
Рис.4.2. Структурная схема Э К Я Р по о д н о г р у п п о в о й методике расчета.
Рассмотрим к о н к р е т н ы е цифровые значения коэффициентов передачи и
постоянных времени Э К Я Р . Положим, для примера, следующие значения
основных параметров и составляющих передаточной функции Э К Я Р :
п =\
0
Л = 0,1-с
-1
3
/'=10- -с
/? = 0,0064.
Тогда:
6S
Т. =
1
Т
1
- ,Г. = — 1 0 ,Г, = — ^ Я,
'
ОД
- 1+К,
10
-
,
(
1
= 0,154с,Д = — ~
= 15,3,
10^ -(1 + 64)
0,0064
0,1 Ю"
3
+
Ж
Л
Р
(4Л8)
'
V
5-(0,154-5+1)
Передаточная функция тепловой системы ядерного реактора.
При делении вещества в реакторе образуется нейтронный поток и
выделяется огромное количество теплоты. Она передается теплоносителю,
нагревая его, и, т е м самым, повышая его температуру.
С о с т а в и м тепловой баланс для реактора. Предположим, что реактор
теплоизолирован, т.е. у него н е т теплообмена с окружающей средой.
Поскольку реактор представляет собой систему двух тел - стержня (ТВС) и
воды, то п р и м е н и м первый закон термодинамики к каждому из тел в
отдельности. Уравнение теплового баланса для ТВС имеет вид:
Qp-Q =Q,
(4.19)
2
где
Q - количество теплоты, выделяемое в единицу времени Т В Э ; Q количество теплоты, отданное в единицу времени воде.
Q =aF(Q ~Q ),
(4.20)
где
а - коэффициент теплоотдачи, Вт/(м К); F - площадь поверхности
теплообмена, м ;
- температура Т В С , К; 0 - температура воды, К.
P
2
2
r
cp
2
2
С Р
П р и теплообмене не все количество теплоты от Т В С передается воде, а
часть его аккумулируется в стержне. С учетом этого тепловая система реактора
может б ы т ь представлена в о д н о м е р н о м приближении
[24] двумя
д и ф ф е р е н ц и а л ь н ы м и уравнениями баланса тепла для Т В С и теплоносителя:
Qp = C -M -~&+a-F-(&
r
r
-в„) ,
r
(4.21)
ат
Q =2G,
2
- С, • ( © „ - © , )+C -A*i ~ е
l
с
р
,
(4.22)
ат
Qp=K -n,
(4.23)
P
где
К - постоянная A 3 , зависящая о т объема, концентрации и ядерных
характеристик горючего, С ,С, - теплоемкости горючего и теплоносителя
соответственно, М , Л/, - массы горючего и теплоносителя соответственно, G, расход теплоносителя.
В ы п о л н и м линеаризацию уравнений (4.21),(4.22),(4.23), для чего
представим переменные в виде с у м м ы постоянной составляющей и
приращения:
Р
Г
г
л - п + An,
0
®
С
0, = в
Р
=
©
С
«
(
4
.
2
4
)
+Д0,.
Л
П о д с т а в и м (4.24) в (4.21), (4.22), (4.23):
К •л. + ЛГ.-Ди = С М..-—
Р
&€n-aF(e -& )+a
Г
ro
а • F ( Д 0 - Д© „) а • F • (@
Г
г
+
F-(дв .-Дв »)
CPI)
у
- © „ ) = 2G C -
rt>
n
I
(0
I
С М
с
- 0 , ) С, • М, - £ - е „ +
(4.25)
+
+ 2-G, С , Д 0 ,
с /
З а п и ш е м у р а в н е н и е статики:
^•n =a-F-(e
o
/ o
-0 i ),
J
a
a-F(0, ~0^) =2-G -C -(0
o
:
1
l
c r o
-0 ).
<
1
4 2 6
>
Вычтем из с и с т е м ы уравнений (4.25) уравнение статики (4.26):
(4.27)
aF{Ae -A&J
= Ci
A
r
l
.—e ,+2-G .C -A0 ,.
o
1
l
o
Преобразуем уравнение (4.27):
А',
- £ - Д 0 , +С, •/ , ~ е „ +2G, • С • Д 0
rfr
ar
ЛП=С;1
С
(4.28)
a-F rfr
a У
Введем с л е д у ю щ и е обозначения:
7
_ 2-C,-C,+g-F,
a r
С учетом в ы ш е у к а з а н н ы х
представим с л е д у ю щ и м образом:
К -Ап=а -^-А® - + д
р
х
А
обозначений
систему
a r
уравнений
(4.28)
-Д © ^
3
rtr
ar
(4.29)
Д0,-=6,-^+6,
- ^ e
dt
c
r
П р и м е н и м к с и с т е м е уравнений (4.29) преобразование Лапласа:
К -Ап=а,р
A&riS)^
S-AQj
•(S)+a -Q (S)+a -Д0 ,
i
CP
.Д€^-(5)+^-5-0
2
С Р
С/
(5).
Преобразуем (4.30) к виду:
К • Ди =[a,
Р
2
-S +(a,
+03)-S+aJ-Д%-(3)
•(5),
(4.30)
В соответствии с уравнением (4.31) представим передаточную ф у н к ц и ю
тепловой с и с т е м ы ядерного реактора в виде:
_ Д 0 „ {S)_
К
™~
^{S)
"(Г ) -5ЧГ,.5 Г
'
2
( 4
г
3 2 )
+
где
а-,
а,
а.
П е р е д а т о ч н а я ф у н к ц и я парогенератора
При выводе уравнений д и н а м и к и теплоносителя
в элементах
парогенератора примем ряд у п р о щ а ю щ и х предположений:
П р я м о т о ч н ы й парогенератор будем рассматривать как т е п л о о б м е н н и к
т и п а «труба в трубе» с эквивалентными п р о х о д н ы м и сечениями теплоносителя
и рабочей с р е д ы и поверхностями т е п л о п е р е д а ч и (рис.4.3).
В зависимости о т т р е б у е м о й т о ч н о с т и оценки динамических режимов
судовой Я Э У объем теплоносителя в элементах парогенератора может
рассматриваться как отдельный аккумулятор и как цепочка простейших,
последовательно
включенных
по контуру циркуляции
теплоносителя,
аккумуляторов,
соответствующих
экономайзерной,
испарительной
и
пароперегревательной зонам. Т а к о е расчленение позволяет б о л е е т о ч н о учесть
влияние массы металла трубок парогенератора на динамические качества Я Э У
[24].
Парогенератор рассматриваем как систему с сосредоточенными
параметрами. Участки сосредоточения - простейшие аккумуляторы, которые
с о в п а д а ю т с характерными т е п л о ф и з и ч е с к и м и зонами парогенератора э к о н о м а й з е р н о й , испарительной и пароперегревательной (рис.4.3).
О п р е д е л я ю щ и м и параметрами в каждом аккумуляторе являются
средние параметры. Продольная теплопроводность в теплоносителе и рабочей
среде отсутствует. Тепловая инерция корпуса парогенератора не учитывается.
Составим уравнение теплового баланса с учетом эффекта аккумуляции
тепла [24,30]:
q-^-£0
c n +
2-q-q-(e
cc -F (Q -Q )
i
r
cn
C T
-e\)^-/[-(0
c
c
+
2
о
-0 X
c
( 4
= C -M -j^ o^-Fy{e -e )
c
c
<h-?г (®с -<=>cJ=2-C Q-(0
П р и м е н и м к уравнениям
В ыш неградского:
К = 0 ,
O T
+
Д 0
л
.
Ш
(4.34)
cm >
-в;).
(4.33),(4.34),(4.35)
.зз)
метод
(4.35)
линеаризации
4
36
< " >
где
Q ,
- средняя температура теплоносителя
CP
первого контура;
средняя температура теплоносителя второго контура; 0
а,,а,
-
коэффициенты
теплоотдачи
по
Г
© >,
fV
-
- температура стенки;
теплоносителям
1 и 2
контура
соответственно; F ,F, - поверхности теплообмена по теплоносителям 1 и 2
t
контура соответственно; С,,С,,Г - теплоемкости теплоносителей 1 и 2 контура
С
и стенки соответственно; М,,Л/,,Л/
- массы теплоносителей 1 и 2 контура и
Г
стенки соответственно.
ГШ,
м
пп
ш
1
2
f
и,
М
и
1
1
м
э,
э
э
2
Рис.4.3. Расчетная схема парогенератора.
Подставим у р а в н е н и е (4.36) в (4.33),(4.34),(4.35), получим:
Я
,~ ©
с
err
= /f+a /-
я
+2-G, -С, - ( ©
(Д0
l
г я
O T O
'от
- 0 [ ) + 2 - G , -С, -Д©,
-Д0 ),
с
(0<мо - © « ) + *• ^
=с
г
-л* ~де
с
г
=
+аг - f
а
- Д©с) =
(0 о-0
2
С
С И
о)+«
(4.37)
(Д0г -
г
ат
zF2
=
2
{&
со
- & )+а
спо
• F • (Д0 - Д0 „) =
2
2
Г
С
>
2С С (<Э -е' )+2-С С -Щ
2
2
ГР20
2<1
г
2
с
п
+ с
2
м
1
~ л е
ат
с
п
.
Запишем уравнение статики:
2 G, С, •(©„,„ - в ; ) = а, - f , -(® o -©«.X
OT
а,-^-(вг
а, •
Л Й
- ® « ) =в - ^ - ( в „ - в „ ) ,
:
•(в„ - в,
Р М
(4.38)
м
) = 2 G - С, • ( в „
3
- 0*)
я
В ы ч т е м из системы уравнений (4.37) уравнение статики (4.38):
/V, / , ~ Д 0
яг
a,F,
а.
* 2 - С, • С, • Д 0
m
(A& ,,-AQ )^C
CI
C
F, (&
М
C
С
срм
М
2
т
— Д 0 + а,
ог
с
-е )=
со
= а, • / v < Л 0 - Д 0 X
т
(Д0 - Д0„.),
С
~ ь е
2
Г
(4.39)
Г
+ 2-С7, - С, • Д 0 „ , .
т
Введем у п р о щ а ю щ и е обозначения:
а, =С, •/
а =2-С,-С,;
2-G
2
а, = C - A / ;
2
V
V
С + « • f;
о,-Л
;
д
Перепишем (4.39) с учетом у п р о щ а ю щ и х обозначений:
о .-^-дв
aг
Л0<Г
=
Д
+
-7"
.
Д 0
д
Д0
Д ]
С/"
+
Й
= з - - 7 - Д в + о ~ д в „ , +а, Д 0 ^ ,
аг
dr
т
Г
6
3
(4.40)
Д0 ;
5
Г Р
П р и м е н и м к уравнению (4.40) преобразование Лапласа:
a, .S-&& -{S)+a -uB
m
t
= а, S Д 0
&&
л
(S) =
m
• (S)+ a S-
С
AQ
t
-{S) = a -St
AQ ,
(4.41)
{s)+a
CP2
- Д0
7
{S) + a, • &B
CI 2
С Р
. -(S)'
(4.42)
- {s).
m
Подставим (4.42) в (4.41), получим:
a, S-AO (S)
+a
CPl
2
Д0
3
С Л
- ( j ) = aj - e - i ' • Д в „ . , - S +
+ (a, - a, +a ) • S • Д0 ^ , • (S) + a • AQ
4
Отсюда
(4.43)
4
7
передаточная
CP2
- (5)
функция
парогенератора
может
быть
представлена в виде:
W
п г
_AQ
(S)_
=
K JT -S
CP2
nr
+ \)
1
(4.44)
2
Д0 (5)
(T f-S +T -S+V
Г Я
2
3
где
7; = а,^ , ( ^ = й ^ , 7 ;
^я. ± ^ , ^
^о, .
Если
в расчетах не учитывать ак куму пирующую
способность
разделяющей стенки, т о передаточная функция парогенератора упростится.
Исходные уравнения могут быть представлены в следующем виде:
=
7
ft • F • ( Д 0 „ - Д 0
Г
С Р 1
f
) = С •М •— Д 0
от
2
г
О Т
+ 2 - С, • С, - ( © - © , )
т
П р и м е н и м к у р а в н е н и я м (4.45) метод л и н е а р и з а ц и и Вышнеградского:
< 4
4 6 >
l ® * « - ® * « . + A « W
'
где
К - к о э ф ф и ц и е н т теплопередачи о т теплоносителя первого контура к
т е п л о н о с и т е л ю второго контура; F - поверхность т е п л о о б м е н а .
Подставим (4.46) в (4.45), получим:
N, 1 ,
dz
Д 0 , + 2-G, -С, Д 0 , +2-G, -С, ( 0 , , - 0 ; ) =
С /
й
(
] (
(4.47)
= N. • / , - 4- Ав<-^ + 2 • G, • С, • Д 0 , + 2 G. С, • ( © ^ - в",)
яг
З а п и ш е м у р а в н е н и е статики:
Й В
2• G, С, ( 0
m o
- 0 | ) = G, • Cj • ( 0 ^ + Д 0 И • F• ( А © ^ - Д в )
(4.48)
т
Вычтем у р а в н е н и е (4.48) из уравнения (4.47):
С, - М, • — Д 9
т
dr
+ 2 • G, • С • Два,. = С,-АЛ • — Д0,._, + 2 • G, С. Д0,„,
' dz
'
(4.49)
'
П р и м е н и м к у р а в н е н и ю (4.49) преобразование Лапласа:
N
) , Sd&&
t
(S)+ 2 С, С, -Д©^,
cn
(S) =
(4.50)
=
-/ , Sd&e (S)+2G
С, Д 0 , (S)
В соответствии с уравнением (4.50) з а п и ш е м передаточную ф у н к ц и ю
парогенератора:
cF2
2
С Р
_m (S)_K -(T s i)
cn
nr
r
+
nr
~A® (S)~
T -S + \
CPt
где
к
п
г
= ^ ,
п г
Т
2
=-
1
1
G,C
^
,
2-GjC,
( 4
•
-
5 , )
Т . - Р ^ - .
•
2-G C,
2
Передаточная функция турбоагрегата.
Расчетная с х е м а турбоагрегата для составления уравнений д в и ж е н и я
представлена на рис. 4.4 [ 5 ] . П р и работе турбины происходит аккумулирование
кинетической энергии ротора и связанными с ним в р а щ а ю щ и м и с я частями
(прежде всего редуктором). Если приведенный к валу т у р б и н ы м о м е н т инерции
этих частей обозначить через I , а частоту вращения через <о, т о в соответствии с
теоремой о м о м е н т е количества д в и ж е н и я м о ж н о записать:
f~u)
= M -Xf
D
Cy
(4.52)
at
где
M
D
и мг
соответственно д в и ж у щ и й момент, развиваемый паром на
о б л о п а ч и в а н и и т у р б и н ы и момент сопротивления со с т о р о н ы гребного винта.
Пар»
в конденсатор
Рис. 4.4. К выводу уравнения движения турбоагрегата.
В установившемся режиме
М до
(4-53)
П р и м е н и м к уравнению (4.52) метод линеаризации В ы ш неградского:
й) = б) + Д<и,
0
М
=M
0
Л/
DC
с
= М
СЙ
+AM ,
D
+
(
4
5
4
^
АМ .
С
П о д с т а в и м уравнение (4.54) в (4.52) и вычтем уравнение статики (4.53):
/
ф = А М
0
- Ш
dr
С
(4.55)
В ы р а ж е н и е для д в и ж у щ е г о момента, как это следует из общей теории
паровых т у р б и н , м о ж е т быть представлено в следующей форме:
(4.56)
где
а - к о э ф ф и ц и е н т пропорциональности; И - изоэнтропийный перепад; D
- массовый р а с х о д пара н а турбину; /д - внутренний К П Д турбины.
П а р а м е т р ы пара (Р
и 0 „ ) на входе в турбину поддерживаются
постоянными автоматически, т а к ж е постоянными обычно полагают д а в л е н и е в
конденсаторе, определяющееся температурой забортной в о д ы . Поэтому
Я = const. Н е и з м е н н ы м м о ж н о считать также значение внутреннего К П Д
т у р б и н ы . Т а к и м образом, д в и ж у щ и й момент турбины представляется функцией
Двух п е р е м е н н ы х :
п
M
D
= A - -
(4.57)
где А = а • Н -т) ~ const.
П р о д и ф ф е р е н ц и р у е м уравнение (4.57) и запишем его в приращениях:
Разделим л е в у ю и правую часть уравнения (4.58) на (4.57);
АЛ/
АР
Ао)
Д
(4.59)
М о м е н т сопротивления гребного винта, состояние поверхностей
которого
удовлетворительно,
а
глубина
погружения
неизменна,
пропорционален квадрату скорости судна или квадрату частоты вращения
гребного вала. В о б щ е м виде выражение для момента сопротивления м о ж н о
представить так:
2
М
= BLo)
с
где
(4.60)
у
В - к о э ф ф и ц и е н т пропорциональности; L - нагрузка на д в и ж и т е л ь .
П р о д и ф ф е р е н ц и р у е м уравнение (4.60) и запишем его в п р и р а щ е н и я х :
АМ
= B-AL-(o) f
С
+ 2B-L
Q
-щ-Ай).
Q
(4.61)
Разделим у р а в н е н и е (4.61) на (4.60):
АМ
AL
С
.
Асо
ш
' СО
*Ъ
0
З а п и ш е м зависимость (4.55) в безразмерном виде:
I-o)
d ( АоЛ_
0
AM
А-М
D
с
(4.63)
ш
Мо
где M
<*Ч о J
=М
Q
=М
D0
Ш
М
О 0
С0
- условие равновесия в стационарном р е ж и м е .
со
О б ъ е д и н я я уравнения (4.59), (4.62) и (4.63), представим полученное в
безразмерном виде:
•df\
— \ + ф = к-у-к-р
1
dr)
где
ф =
Ай)/й) ;
й
постоянная
£ =
времени
аккумулированной
( 4 6 4 )
1/3; ф = I-<У /3-Л/ ;
р
(коэффициент
0
a
Q
определяющийся
во вращающихся массах кинетической энергией);
относительная частота вращения; y~AD/D
(j = LjL
к - коэффициент усиления; 7" -
инерционности,
Ф -
- относительный р а с х о д пара;
- относительная нагрузка.
В ы р а ж е н и е д л я передаточной функции паровой турбины, как объекта
регулирования частоты вращения гребного вала, получается в результате
преобразования уравнения (4.64) по Лапласу:
T-S- </>{s) + <{,(s)= к • (s)~
r
k {S).
M
(
4.б5)
П о л о ж и м , ч т о в о з м у щ е н и е есть величина постоянная, тогда
n{S)=0.
Передаточная функция турбоагрегата по регулирующему воздействию в этом
случае равна:
W?a(S)=
т
л
К
Если
4^
'
y(S)
положить,
= —
^
—
(4 66)
1
Г - 5+1'
что
расход
пара
постоянен,
'
с
тогда
?-( )=0.
Передаточная функция турбоагрегата по возмущению в этом случае равна:
Передаточная функция главного конденсатора.
Объект регулирования - конденсатосборник - представляет собой
емкость с о с в о б о д н ы м сливом и задвижками 1 и 2. Посредством первой
осуществляется регулирующее воздействие, а второй - возмущающее
воздействие (рис.4.5).
* г
г
j
Рис.4.5. Принципиальная схема конденсатосборника.
Регулируемой
величиной
является
уровень
Н
воды
в
конденсатосборнике. Задача регулирования состоит в т о м , чтобы независимо
от количесгва G i пара, поступающего в турбину и далее в конденсатор,
сохранить положение уровня в некоторых, заранее заданных, пределах Н'
млх
Нмш-
-
Уровень в емкости будет оставаться неизменным при выполнении
условия:
G
2 ^ -
G
i o = °
или
G
3
-G,=0.
Добавление нуля в индексе переменной
рассматривается ее установившееся значение.
(4.68)
указывает
на т о , что
Уравнение д в и ж е н и я для конденсатосборника можно записать в виде
F
Hr
=
'~J^
G
2 ~
G
(4.69)
\ .
П р о в е д е м л и н е а р и з а ц и ю уравнения (469) методом В ы ш н е г р а д с к о г о , для
чего представим п е р е м е н н ы е в виде:
'# = # + д я ,
0
^
2
o
AG ,
+
2
(
4
?
0
)
П о д с т а в и м (4.70) в (4.69) и вычтем уравнение статики (4.68):
F-~AH
= AG -AG
2
l
( 4 7 1 )
Расход ж и д к о с т и через клапан, о т к р ы т ы й на величину m
уравнению:
G, = ^ , - ш - / д ^ "
1
где
^рД^
Л
подчиняется
b
(4.72)
1
- соответственно п р и в е д е н н ы й коэффициент с о п р о т и в л е н и я и
разность д а в л е н и й д о и после клапана.
Д л я у п р о щ е н и я дальнейших
рассуждений
будем
полагать,
что
AP = const, тогда:
Y
Д С , = £ • A m , - ^[АРу .
(4.73)
Количество в ы т е к а ю щ е й ж и д к о с т и зависит о т открытия к л а п а н а т
высоты уровня Н , о п р е д е л я ю щ е г о перепад давлений на клапане т :
2
и
2
G,=£ -m -V#,
2
где
(4.74)
2
£ - п р и в е д е н н ы й к о э ф ф и ц и е н т сопротивлений.
2
AG =£ -Am -jH
2
2
+
2
Ь ' ~ ^ = .
(4.75)
Приведем уравнения (4.71), (4.73) и (4.75) к б е з р а з м е р н о м у
поделив их соответственно на (4.68), (4.72) и (4.74):
FH
d (m\_AG
2
AG
{
"оГ'лЫ^'огДС, _
Ат
х
виду,
(4
-
76)
AG _Am
2
2
G'2,
"*2
АН
+ •2 - Я "
О б ъ е д и н и м уравнения (4.76), (4.77) и (4.78):
F
где
H
d
Л
А
о
о
(4.79)
АН
Ат^
Дт
Ф=—
, »г=
'-,
— .
Я
w
m,
П р и м е н и м к у р а в н е н и ю (4.79) преобразование Лапласа:
2
r-s-4s)+4sM-/i (s),
(4.80)
2
I F
где
Н
Т =
А = 2.
О т с ю д а передаточная функция конденсатосборника по регулирующему
в о з д е й с т в и ю равна, если (JJ,(S)=
О):
_
M {S)
к
т-s+i
2
(4-81)
•
Передаточная функция объекта по возмущению, если
T-S
MAS)
(JJ (S)=
2
0):
(4.82)
+ l
Передаточная функция паропровода (газопровода)
С ж и м а е м а я среда протекает последовательно через
клапан Ш|, емкость V и клапан нагрузки m (рис.4.6) [25].
регулирующий
z
GLP1
Ш.
п2
-—oki
Рис. 4.6. К выводу уравнения динамики давления пара (газа) в емкости.
В установившемся с о с т о я н и и :
У р а в н е н и е д в и ж е н и я м о ж н о записать в с л е д у ю щ е м виде:
V
— Ар = AG, - AG,
at
где
&
G
~
2
G
G
2 o ~
2>
AP = Po' pИзменения состояния среды в емкости связано с изменением давления.
В общем случае п о л и т р о п и ч е с к о г о процесса:
Р
= const = С,
откуда следует, что
d
—-р = С пр dv
d
-~р,
dx
я
0
или
d
Р
— р=— ^
</г
п-Р
d
0
о
(4.84)
H
dz
0
'
Уравнение р а с х о д о в представим в виде:
С,
=£ m JP~^P,
r
r
(4.85)
В соответствии с принятым обозначением Р\ ~ const
к
Р = const
2
t
каждый из р а с х о д о в является функцией двух п е р е м е н н ы х . Д и ф ф е р е н ц и р у я
(4.85), з а п и ш е м з а в и с и м о с т и в п р и р а щ е н и я х :
AG =
| .Am .(^P -p)-j_J^
1
1
1
1
(4.86)
AG
2
= ^Am -{jP-P
2
)
2
•ДЛ
Полагая P - Р = Р - Р = АР , з а п и ш е м (4.86) в виде:
t
AG,
_ Am,
AG
т
lQ
AG 2
AG
2
Хо
_
0
АР
2-АР
0
Am.
АР
т.
2-ДА
(4-87)
Подставляя (4.87) и (4.84) в (4.83), получим:
dr
где
• постоянная
времени
емкости
и
коэффициент
АР
Дт
Дт,
~ р > ^ ~
>
~
~ соответственно безразмерные
О
"Ч
'"I
отклонения давления в емкости и перемещения клапана на входе и выходе.
Применим к уравнению (4.88) преобразование Лапласа:
2
усиления;
Г]
2
т
7;-5-А(5) + А(5) = А:^ (5)-Л- 1 (5).
1
/
2
Отсюда
передаточная
функция
паропровода
регулирующему воздействию равна, если (jj (S ) = 0 ) :
(газопровода)
по
г
т т г Передаточная функция
равна, если (ji , (S ) = 0 ) ;
W,
паропровода
<
(газопровода)
по
4 8 9
>
возмущению
(4.90)
Представленные передаточные функции (4.89) и (4.90) не учитывают
влияния температуры н а изменение давления среды, что весьма важно для
определения д и н а м и ч е с к о г о свойства паропровода, как объекта управления.
Рассмотрим подобное звено. Физическая модель паропровода (сюда относим
пароперегревательные поверхности нагрева, паропровод свежего пара и
турбину с регулирующими клапанами) включает в себя последовательно
соединенные, с о с р е д о т о ч е н н ы е в точке сопротивления паропровода, его
паровую емкость и переменные местные сопротивления регулирующих
клапанов и турбины [33] (рис.4.7).
Рис 4.7.Физическая модель паропровода:
1 - парообразующая поверхность нагрева; 2 - сопротивление пароперегревателя;
3 - паровая емкость; 4 - сопротивление регулирующих клапанов и турбины; 5 конденсатор.
Применительно
к рассматриваемой
модели з а п и ш е м
уравнения для систем с с о с р е д о т о ч е н н ы м и параметрами.
У р а в н е н и е сохранения вещества
D,-D
= V ~ р .
основные
(4.91)
ах
У р а в н е н и е состояния
p = p(P,V).
(4.92)
У р а в н е н и е д в и ж е н и я сводится к зависимости перепада давления между
входной камерой и паропроводом и расхода:
(а!
3)
Р
где Е, - п р и в е д е н н ы й коэффициент сопротивления.
Плотность
насыщенного
пара
р = р"
при
реально
возможных
колебаниях давления м о ж н о считать постоянной.
У р а в н е н и е клапана связывает перепад давления н а нем с р а с х о д о м пара
и степенью о т к р ы т и я клапана:
(D Y
Р - Р ^ ^ - ^ у -
,
(4.94)
где
%кл
коэффициент
сопротивления
характеризующая степень открытия клапана.
-
переменная
величина,
В систему у р а в н е н и й , о п и с ы в а ю щ и х д и н а м и к у расхода и давления в
трубопроводе,
входит
семь
переменных
величин:
0 ,0,р,Р Р ,Р ,%
реакциями с и с т е м ы и
возмущениями.
1
>
Л
2
К
Л
.
Первые
четыре
переменных
являются
подлежат о п р е д е л е н и ю , а т р и последних
-
Рассматриваемая с и с т е м а у р а в н е н и й нелинейная, поэтому ее надо
линеаризовать по о б щ е м у правилу. Уравнения для отклонений п а р а м е т р о в
имеют с л е д у ю щ и й в и д :
дд-до =г - ^ д
Л
(4
=
.
95)
(4.97)
'о
D
£
Р
(4.98)
где
gp
2
<5??
=
~
=Р - Р
0
- сопротивление паропровода в стационарном режиме;
- перепад давления на регулирующем, клапане в стационарном
2о
режиме.
Объединяя уравнения (4.95) - (4.98), получим:
dx
dx
где
1
5P
1
-
l
_
>
Po
J
r
"
y
dP
D
\SP SP
0
r
7
.+
P
t
\d
dr
)
SP,
dP
о-
'
масса
пара в трубе.
Рассчитать коэффициенты легко, зная входящие в них статические
величины. Производные dpjdP
и dPjdt
для пара находятся из таблиц.
К уравнению (4.99) применим преобразование Лапласа:
AP(S)=W -APXS)+W
PPi
-APM+Wn-AfaW+WnMs),
PR
где
(4.1100)
- передаточные функции по давлению пара при j - м
возмущении.
Для
рассматриваемого
с л е д у ю щ и й вид:
к
ЯР,
р.
Т S
+1
Т -S
+1
W
W рр,
случая
Г-5 + 1
- K J T S
Т S +
r
r
+
\ )
1
передаточные
функции
имеют
4.2. Д и н а м и ч е с к и е свойства звеньев систем у п р а в л е н и я и р е г у л и р о в а н и я
Измерители ч а с т о т ы вращения
В системах автоматического управления для измерения регулируемых,
контролируемых
и
защищаемых
параметров
служат
специальные
измерительные элементы - датчики. И з м е р я е м ы е параметры в корабельных
условиях и м е ю т различную физическую природу, поэтому измерительное
устройство является преобразователем измеряемой величины в величину иной
физической п р и р о д ы , удобной д л я д и с т а н ц и о н н о й передачи и д а л ь н е й ш е й
обработки в целях контроля регулирования или аварийной защиты
В к о р а б е л ь н ы х системах А У для измерения частоты вращения вала
применяются
центробежные,
гидродинамические,
электромагнитные
и
индукционные т а х о м е т р ы . Центробежный тахометр состоит из д в у х грузиков,
соединенных ш а р н и р н ы м и тягами с осью вращения и м у ф т о й , свободно
п е р е м е щ а ю щ е й с я вдоль о с и . При вращении грузики стремятся разойтись под
действием ц е н т р о б е ж н ы х сил и, в зависимости о т соотношения ц е н т р о б е ж н ы х
сил, упругих с и л п р у ж и н ы , сил вязкого трения и веса грузиков, м у ф т а будет
перемещаться вверх или вниз.
Дифференциальное
уравнение
движения
приближении м о ж н о представить в виде [23]:
„
2
2
d Ax
Г • —
г
тахометра
в
линейном
dAx
+ 2-£-Т- —+Ах
= к -Ай>,
ш
(4.102)
Соответственно
Т = jmjl
• F ; Г, = 2-£-T
= rf2-F
,
(4.103)
где
m - приведенная к муфте масса п о д в и ж н ы х частей; F - п о д д е р ж и в а ю щ а я
с и л а центробежного маятника; г- коэффициент, у ч и т ы в а ю щ и й сопротивление,
пропорциональное частоте вращения; Ах- перемещение м у ф т ы ; а>- частота
вращения.
Передаточная функция центробежного тахометра имеет в и д :
"
^
•
•
А
ч
+Г
(
4
Ш
4
)
где постоянные времени равны; 7* = 2,2 - 5 -с, Т, =0,2-0,3 f .
Основу гидродинамических тахометров составляют о б ъ е м н ы е или
центробежные насосы (импеллеры), п р и в о д и м ы е от вала, частота вращения
которого измеряется.
Ц е н т р о б е ж н ы е гидродинамические т а х о м е т р ы обладают нелинейной
статической характеристикой, что сказывается н а точности измерений при
широком диапазоне изменения частоты вращения.
По д и н а м и ч е с к и м свойствам импеллер можно считать б е з ы н е р ц и о н н ы м
звеном с передаточной функцией:
WJs)
=k .
a
(4.105)
Д л я измерения частоты вращения в комплексных системах управления
С Э У ш и р о к о е распространение получили тахометры постоянного тока,
переменного тока и асинхронные тахометры. Здесь используется закон
электромагнитной индукции:
E = Blo),
(4.106)
где
Е - наводимая Э Д С ; В - магнитная индукция; / - активная длина
проводника; <а~ скорость перемещения проводника.
Передаточная
функция электрических тахометров как устройств
измерения частоты вращения с достаточной для практики точностью
представляется уравнением (105).
Измерители давления
П р и н ц и п действия датчиков давления (перепада давления, вакуума)
независимо от конструктивного исполнения состоит в т о м , что контролируемая
среда воздействует непосредственно или через импульсные трубки на упругий
чувствительный элемент, который при этом деформируется пропорционально
п р и л о ж е н н о м у давлению или разности давлений. Чувствительный элемент
воздействует на выходное устройство, в котором механическое перемещение
преобразуется
в
электрический
сигнал,
пропорциональный
этому
п е р е м е щ е н и ю . В зависимости от величины измеряемого параметра, а также
конструктивного исполнения датчика в качестве чувствительных элементов
используются
Манометрическая
трубчатая
пружина
(трубка
Бурдона)
имеет
э л л и п т и ч е с к у ю форму, причем малая ось лежит в плоскости, в которой
изогнута трубка. П о д действием внутреннего давления манометрическая трубка
распрямляется.
Гофрированная мембрана имеет кольцевые гофры, с н и ж а ю щ и е ее
жесткость. Для еше большего снижения жесткости манометрической системы
применяется соединение нескольких мембран в мембранные коробки. В этом
случае внутренний объем обычно заполняется дистиллятом [34].
С и л ь ф о н ы представляют собой гофрированные цилиндрические коробки.
В судовых приборах применяются коробки диаметром д о 140 мм с ходом
д о н ы ш к а сильфонов в пределах 1,3+24 " * Чаще всего сильфоны используются
для измерения малых давлений или перепадов.
Уравнение динамики для упругих элементов можно записать в виде:
2
d -u
d
„
р = т —— + Г - — и + С - и ,
dt
dr
(4.107)
где
т - масса жидкости на единицу площади, приведенная к чувствительному
элементу; и- перемещение чувствительного элемента (выходная координата);
г- к о э ф ф и ц и е н т вязкого трения н а единицу
площади; С - к о э ф ф и ц и е н т
жесткости чувствительного элемента; р - д а в л е н и е (входная к о о р д и н а т а ) .
Передаточная ф у н к ц и я упругих элементов будет:
^
где
К
г
л
= \/N;
Т{ = m/C;
,
(
-
4
,
0
8
)
Т = rjC .
х
Значения к о э ф ф и ц и е н т о в 7", Г представлены в таблице 4.1 [ 3 4 ] .
и
:
Т а б л и ц а 4.1 .Значения к о э ф ф и ц и е н т о в Г, и т д л я упругих
х
чувствительных э л е м е н т о в
•Т>
п/
Наименование
п
1. М а н о м е т р и ч е с к и е
трубки
2.
3.
2
2
Tc
lt
4
Мембраны
при низком д а в л е н и и
при с р е д н е м и высоком
давлении
Сильфоны
2-Ю" ... 1,5-10"'
1,5-10-3^0,15
0,2 -г 0,4
4
4-10 -ь0,15
4:10"* -rl.5-10"
0,4 ^ 1,5
1
_1
4^-15
Измерители температуры
Д л я измерения т е м п е р а т у р ы в корабельных объектах управления
применяются различные э л е м е н т ы , в основу которых п о л о ж е н ы т е п л о в о е
расширение ( м а н о м е т р и ч е с к и е т е р м о м е т р ы ) , изменение э л е к т р о п р о в о д н о с т и
(термосопротивления) и появления т е р м о Э Д С (термопары).
М а н о м е т р и ч е с к и е д а т ч и к и б ы в а ю т п а р о ж и д к о с т н ы м и , газовыми и
ж и д к о с т н ы м и . Работа п а р о ж и д к о с т н о г о д а т ч и к а основана н а и с п о л ь з о в а н и и
зависимости давления н а с ы щ е н н ы х п а р о в жидкости о т е е т е м п е р а т у р ы . В
качестве ж и д к о с т и - наполнителя могут применяться хлористый этил, э т и л о в ы й
э ф и р , а ц е т о н , анилин , вода и д р . П а р о в о й объем д о л ж е н составлять не более 80
и не менее 2 0 % всего о б ъ е м а наполнителя.
Г а з о в ы е т е р м о м е т р ы отличаются о т конденсационных ( п а р о ж и д к о с т н ы х )
только н а п о л н и т е л е м (инертный газ, ч а щ е всего азот). Т е р м о б а л л о н ,
о м ы в а е м ы й средой, т е м п е р а т у р а которой измеряется, соединен к а п и л л я р н о й
трубкой с о б ы ч н ы м д а т ч и к о м давления (сильфон, трубчатая пружина,
м е м б р а н а ) . И з м е н е н и е т е м п е р а т у р ы преобразуется посредством изменения
о б ъ е м а ж и д к о с т и или давления газа и н а с ы щ е н н ы х паров в п е р е м е щ е н и е
манометрического чувствительного элемента.
Динамические
свойства
датчика
манометрического
термометра
описываются апериодическим звеном первого порядка [23]:
М*> = 7 Т Г Й '
где
(4-109)
Т - постоянная времени звена (2 -5 с).
И з м е р е н и е температуры с п о м о щ ь ю термометров
сопротивления
основано н а изменении омического сопротивления проводника с изменением
температуры. Материалом для изготовления термометров сопротивления
служат преимущественно металлы. Чувствительный элемент такого термометра
изготавливается из платиновой проволоки 0=0,05+0,07 и , которая бифилярно
намалывается на изолирующий каркас.
Действие т е р м о п а р основано н а свойстве двух разнородных проводников
создавать Э Д С , если спаи имеют различную температуру. В корабельных С У
получили распространение хромель - копелевые т е р м о п а р ы .
Передаточная функция термометра сопротивления, как и термопары,
определяется из уравнения теплового баланса. Если рассматривать Т С и Т П как
сосредоточенную тепловую емкость, не учитывая лучистого теплообмена и
утечки тепла, то с б о л ь ш о й достоверностью передаточную функцию можно
представить апериодическим звеном первого порядка (4.109). Значения г для
ТС в зависимости о т конструкции колеблются от 5 д о 40с, а для ТП они
составляют 6 - 90с. Для миниатюрной термопары о н и могут быть 0.5 - 1.5 с.
т
т
Измерители уровня
В корабельных условиях используются несколько типов датчиков,
отличающихся
принципом
действия.
Среди
них
поплавковые,
гидростатические, емкостные, ультразвуковые и ультракоротковолновые.
В
поплавковых уровнемерах
изменение уровня
воспринимается
поплавком, кинематически связанным с измерительной индуктивной катушкой.
Д и н а м и ч е с к и е свойства поплавкового датчика могут быть описаны формулой:
КЬ)
=- ^ - ,
T -s
d
где
+\
(4.П0)
Т - постоянная времени (0,05+2 п ) .
у
Гидростатические измерители уровня основаны на измерении разности
гидростатических давлений, создаваемых измеряемым столбом жидкости.
Динамические свойства таких датчиков определяются характеристиками
дифманометров.
Электронные
уровнемеры
(емкостные,
ультразвуковые
и
ультракоротковолновые)
ввиду их быстродействия
можно отнести к
б е з ы н е р ц и о н н ы м звеньям.
Электрические усилители
Д л я усиления сигналов датчиков в корабельных С А Р находят применение
магнитные, полупроводниковые и тиристорные усилители.
Магнитный
усилитель
это
ферромагнитное
устройство,
предназначенное д л я усиления мощности подводимых к нему электрических
сигналов п о с т о я н н о г о тока. Основу л ю б о й с х е м ы М У составляют д р о с с е л и с
п о д м а г н и ч и в а н и е м , т . е . дроссели
с одновременным
намагничиванием
материала с е р д е ч н и к а постоянным и п е р е м е н н ы м магнитными п о л я м и .
У р а в н е н и е д в и ж е н и я для М У м о ж н о представить в виде [ 3 5 ] :
=!±.! +£L±L.*-i
Vi
.
p
6
4 /
Р
К
с
dz
Применяя к уравнению
передаточную ф у н к ц и ю :
W
o^
где
(4.111)
9
(4.111)
преобразование
Лапласа,
= V^->
k = K./R 6
(4-И2)
коэффициент
v
времени звена;
получим
K иКt
Р
передачи
звена;
Т -К /4-/у
постоянная
р
коэффициент усиления по току и м о щ н о с т и д л я
усилителя; л, - сопротивление обмотки управления; / - частота п и т а ю щ е г о
напряжения; U v
н а п р я ж е н и е управления, входная величина; 1 т о к рабочей
Р
цепи, в ы х о д н а я в е л и ч и н а
П о л у п р о в о д н и к о в ы е усилители, построенные на базе микроэлектроники
(микросхемы) я в л я ю т с я б е з ы н е р ц и о н н ы м и звеньями и используются в С А Р
С Э У в качестве предварительных усилителей.
Д и н а м и к а т и р и с т о р н ы х усилителей рассматривается в к о м п л е к с е с
шаговыми д в и г а т е л я м и .
Исполнительные элементы
Электродвигатели постоянного и переменного тока
Электродвигатели имеют ряд существенных особенностей: сравнительно
малые г а б а р и т ы и вес при относительно б о л ь ш о й механической м о щ н о с т и ,
малую и н е р ц и о н н о с т ь , небольшой м о м е н т трения и простоту регулирования
частоты в р а щ е н и я .
У р а в н е н и е д в и ж е н и я для двигателя постоянного т о к а м о ж е т быть
представлено в в и д е [35]:
U
= .
R
i +
L
. ±
+
(4.112)
e
dx
где
i- т о к в якорной цепи; R- активное с у м м а р н о е сопротивление я к о р н о й
цепи; L - с у м м а р н а я индуктивность якорной цепи; е - Э Д С , наводимая в
л
обмотке якоря потоком обмотки возбуждения Фв .
е
=N o ,
л
где
t
A
(4.113)
С - электрическая постоянная двигателя (определяется к о н с т р у к ц и е й и
Е
потоком Ф в ) .
Д и н а м и ч е с к и й момент якоря равен:
(4.114)
где
/-
момент
инерции;
а> - угловая
0
скорость
якоря
двигателя;
Си
механическая постоянная двигателя (определяется конструкцией и потоком
Фв).
Из уравнения (4.114) найдем:
(4.115)
Подставляя (4.114), (4.113) и (4.112) в (4.113), получим:
Применяя преобразование Лапласа и учитывая, что
Т
м
=
с~с~ '
Г
э
=
1'
е
К
=
Г/
получим передаточную ф у н к ц и ю двигателя постоянного тока:
W (S) =
f
D
.
(4.117)
Часто Т пренебрегают ввиду ее малости, тогда:
э
М*)=-=г-~т-
(4Л18)
Механическая постоянная времени для двигателей постоянного тока
находится в пределах 0,04+0,6 с, а для асинхронных двигателей о т 0,02+0,08 п.
Шаговые двигатели
Ш а г о в ы е двигатели используются в СУ в комплекте с тиристорным
блоком регулирования. В случае, если управление реверсивного шагового
двигателя осуществляется подачей питающего напряжения и при постоянной
частоте следования импульсов / , его структурная схема может быть
представлена в виде, изображенном н а р и с . 4 . 8 [36].
Н е л и н е й н ы й элемент 1 этой схемы соответствует ключевому устройству
управления подачей питающего напряжения U. Устройство имеет зону
нечувствительности ± £ . Ключ 2 отражает т о т факт, что на шаговый двигатель
подается
питание
в виде импульсов постоянной
частоты
f .
И н т е г р и р у ю щ е е звено 3 отражает свойства шагового двигателя как
k
формирующего
элемента
с
передаточной
функцией
и , (5) = 1/5 ,так
7
как
з а п о м и н а н и е осуществляется на н е о г р а н и ч е н н о большой п р о м е ж у т о к времени.
1
2
3
4
Рис.4.8.Структурная с х е м а шагового двигателя.
П о с л е д н е е з в е н о 4 с передаточной функцией Wt(S) = e' f(T*
S + г , -5 + 1)
о т р а ж а е т д и н а м и ч е с к о е свойство ш а г о в о г о двигателя при д в и ж е н и и его ротора
в пределах о д н о г о шага. В формуле приняты следующие о б о з н а ч е н и я : г постоянная в р е м е н и запаздывания, о п р е д е л я е м а я индуктивностью и а к т и в н ы м
с о п р о т и в л е н и е м цепи о б м о т о к статора, на которое подаются и м п у л ь с ы
управляющего напряжения;
Г, - постоянная времени,
обусловленная
и н е р ц и о н н о с т ь ю якоря и п о д в и ж н ы х частей, связанных с р о т о р о м ; 7\ постоянная в р е м е н и , определяемая с и л а м и вязкого трения.
rS
С учетом упрощающих допущений
ф у н к ц и ю ш а г о в о г о двигателя в виде:
W (*) = — г - ^
ч.
7^-
времени
e
где
постоянная
можно
принять
z
передаточную
(4.119)
двигателя
находится
в пределах
значений
механической п о с т о я н н о й времени д л я двигателей постоянного тока.
Г и д р а в л и ч е с к и е и пневматические д в и г а т е л и
Г и д р а в л и ч е с к и е и пневматические двигатели - исполнительные э л е м е н т ы
- используют с т а т и ч е с к у ю э н е р г и ю ж и д к о с т и или воздуха, н а х о д я щ и х с я п о д
д а в л е н и е м , т.е. это с и л о в ы е э л е м е н т ы , преобразующие э н е р г и ю п о т о к а
ж и д к о с т и или в о з д у х а (газа) в м е х а н и ч е с к у ю э н е р г и ю п е р е м е щ е н и я п о р ш н я ,
поворота л о п а с т и или вращения в ы х о д н о г о вала. Г и д р а в л и ч е с к и е и
п н е в м а т и ч е с к и е д в и г а т е л и просты по конструкции, надежны, д о л г о в е ч н ы ,
обладают б о л ь ш и м т я г о в ы м усилием. В корабельных С У используются
главным образом б л о к и сервомоторов, в к л ю ч а ю щ и х в себя и с п о л н и т е л ь н ы й
механизм и усилитель (струйный или з о л о т н и к о в ы й распределитель, рис.4.9 )
У р а в н е н и е д в и ж е н и я для с е р в о м о т о р а с золотниковым р а с п р е д е л и т е л е м
можно записать в виде:
F~H
= bh-v
t
(4.120)
где
v - с к о р о с т ь потока ж и д к о с т и в подводящем трубопроводе; F - п л о щ а д ь
п о р ш н я двигателя; dHfdt - скорость х о д а поршня; Л - величина смещения
золотника; ь - ш и р и н а окон золотника.
Р и с . 4.9. Гидравлический двигатель с золотниковым распределителем.
Для
золотникового
распределения
золотника м о ж н о с ч и т а т ь &p=const,
при
определенном
положении
v=const. Линеаризовав выражение (4.120),
перейдем к о т н о с и т е л ь н ы м величинам:
ш
ДА
а н
пил
F
Н.
(4-121)
it
dx
(4.122)
F-H
(4.123)
ИЛИ
(4.124)
dx
где
T
- постоянная времени сервомотора. Соответственно
C
передаточная
ф у н к ц и я сервомотора равна:
W (S)=
C
cr(S)
=
(4.125)
T -S
C
Д л я п о р ш н е в ы х двигателей 7jj=5-i-20 с . Если учесть с ж и м а е м о с т ь рабочей
с р е д ы , передаточная функция примет в и д :
W {S) =
C
(4.126)
Т - S (Г ~S +1)"
Г
Постоянная
м
времени
г для
м
гидравлических
двигателей
составляет
0,005*0,1 с [ 2 3 ] .
Электромагнитные пропорциональные управляющие элементы
Э л е к т р о м а г н и т н ы е , пропорциональные, управляющие элементы ( Э П У Э )
относятся к устройствам непрерывного действия, у которых выходной
параметр
(перемещение)
изменяется
пропорционально
входному
(электрическому сигналу) [37].
Эти э л е м е н т ы , как и э л е к т р о м а г н и т н ы е механизмы, в з а в и с и м о с т и о т
характера м а г н и т о д в и ж у щ е й силы и потока, делятся на с л е д у ю щ и е группы:
нейтральные Э П У Э постоянного тока, действие которых зависит о т с и л ы этого
тока и не зависит от его направления; п о л я р и з о в а н н ы е Э П У Э п о с т о я н н о г о тока,
направление п е р е м е щ е н и я и с п о л н и т е л ь н о г о органа которых зависит от
направления т о к а на е г о входе; нейтральные Э П У Э переменного тока, в
которых п о т о к изменяется во времени как по з н а ч е н и ю , так и п о н а п р а в л е н и ю .
В зависимости о т характера д в и ж е н и я исполнительный о р г а н а Э П У Э
делятся
н а устройства
с линейным
(возвратно
поступательным)
перемещением и с угловым перемещением.
В
устройствах
корабельной
автоматики
(электрогидравлических
приводах - Э Г П ) наибольшее р а с п р о с т р а н е н и е получили п о л я р и з о в а н н ы е
Э П У Э п о с т о я н н о г о тока с угловым п е р е м е щ е н и е м (рис. 4.10).
Т Т
Рис. 4.10. Э л е к т р о г и д р а в л и ч е с к и й привод.
П р и р а б о т е Э П У Э о т усилителя с в ы с о к о о м н ы м в ы х о д о м у р а в н е н и е
движения ЭПУЭ имеет вид:
d
2
x
где
dx
- n
(4.127)
dr
т - масса якоря; * - п е р е м е щ е н и е якоря; Q - тяговое э л е к т р о м а г н и т н о е
m
n
усилие; а„
- к о э ф ф и ц и е н т вязкостного т р е н и я ; С - ж е с т к о с т ь
пружины
подвески якоря.
Qt=K,-dI
+ K -x.
(4.128)
x
О б ъ е д и н и м (4.127) и (4.128):
.£Л
+а
~ + (С-К,.)х
=К
М.
dr
dx
В уравнении (4.129) введем с л е д у ю щ и е о б о з н а ч е н и я :
х
. А/
т
„
IT™
„
т
„2 ,
Т-,
т
д
о
(4.129)
1
2
с-к
х
где
1 их
я
я
-
• -
•
г-^т\Т '
г
—
х
=
я
—
~'/.
.
=
<;
"
К.
I.
•= к
л
{с-к )-х
х
ш
- м а к с и м а л ь н ы е значения сигнала управления и хода я к о р я .
Введем
принятые
значения
в уравнение
(4.129) и,
применяя
преобразование Лапласа, получим п е р е д а т о ч н у ю ф у н к ц и ю Э П У Э в виде:
w
K
/ л - * ^ -
W3m
S)
2
2
^ ~7(S)~T -s 24
( 4 1 3 0 )
т s+v
+
Работа Э П У Э от усилителя с низкоомным выходом отличается
существенным влиянием индуктивности его обмоток на динамику Э П У Э . Для
д а н н о г о р е ж и м а р а б о т ы Э П У Э уравнение электрического равновесия имеет
вид:
У, =(R + R )M
I
+ L — AI,
(4.131)
dx
где
R и R - активные сопротивления обмоток Э П У Э и усилителя; Д/ = /,—/, разность т о к о в в обмотке Э П У Э ; L - индуктивность его обмоток.
П о с л е введения обозначений
t
Hi~ = u
— =i
/„
*
С/,
1
Т
' ' Л + Л/
'
К •=
r
U
(R +
-
t
R )l„
l
уравнение (4.131) в преобразованиях Лапласа примет вид
функции звена «выход усилителя - обмотка управления Э П У Э » :
передаточной
tr )=
M I ^ — ^ - .
(4.132)
(J(S)
Ту 5 + 1
О б щ а я передаточная функция Э Г П определяется выражением:
iS
Обратные связи и корректирующие звенья
Ж е с т к а я или статическая обратная связь имеет постоянный коэффициент
усиления в течение всего процесса регулирования. Таковы, например,
механическая (рычажная) и гидравлическая связи [39].
Гибкая связь имеет коэффициент усиления в течение процесса
регулирования, но к моменту окончания этого процесса приобретающий
постоянное значение к„.
Если к = о, гибкая связь называется исчезающей. Закон изменения
к о э ф ф и ц и е н т а усиления в течение процесса регулирования в зависимости от
устройства связи может определяться и значениями входного и выходного
сигнала и скоростями их изменения и изменениями этих скоростей. Очень
в а ж н ы м частным видом гибкой связи является изодромная связь, в которой
в ы х о д н о й сигнал Х
зависит от величины входного сигнала Х
и от величин
dx /dr,
dx jdT,
d x {dT-.
Эта связь часто используется в виде
исчезающей.
Изодромное звено показано на рис. 4.11.
0
вых
ш
2
M
i00
A06
Рис. 4.11. И з о д р о м н о е звено.
X,
Д л я составления уравнения д в и ж е н и я введем н е о б х о д и м ы е о б о з н а ч е н и я :
- Хах - п е р е м е щ е н и е поршня; Х = х^х
- перемещение
цилиндра;
и
X = Х„ - Х
ц
- результирующее перемещение.
Сила сжатия п р у ж и н ы определяется в ы р а ж е н и е м :
(4.134)
где
К
ПР
- к о э ф ф и ц и е н т жесткости п р у ж и н ы .
Силу т р е н и я п о р ш н я Р„ найдем так:
(4.135)
где
Ь - к о э ф ф и ц и е н т жидкостного т р е н и я .
О б ъ е д и н и м (4.134) и (4.135), получим:
(4.136)
dr
П р и м е н и м к у р а в н е н и ю (4.136) преобразование
передаточная ф у н к ц и я изодромного звена п р и м е т вид:
W(S)
Лапласа,
Т S
=
тогда
(4.137)
х
Г-5 + 1
В к о р а б е л ь н о й автоматике для обеспечения заданного качества процесса
управления ш и р о к о используются к о р р е к т и р у ю щ и е звенья (в частности,
электрические RC - цепочки). Рассмотрим т а к о е звено на п р и м е р е р и с . 4.12.
п
i(S)
1/CS
UBX(S)
UBMX(S)
Рис. 4.12. К о р р е к т и р у ю щ е е звено - RC.
В соответствии
д » н * е н ия этого звена:
1
с
законом
О м а составим
операторные
уравнения
(4.138)
c-s
R.C-S
+l
П е р е м н о ж и м левую и правую части уравнения (4.138) на R:
(4.139)
О т с ю д а передаточная функция звена будет иметь вид:
Т = R • С - постоянная времени звена.
З в е н о называют интегро - д и ф ф е р е н ц и р у ю щ и м (упругим), если его
передаточная функция имеет вид:
где
-S + 1)
(4.140)
Г, -5 + 1
где
7| и 7", - постоянные времени звена; к - коэффициент усиления.
В зависимости от соотношения постоянных времени 7", и Т > т.е. от схемы
исполнения, звено будет обладать различными свойствами: будет работать
л и б о в р е ж и м е дифференцирования, либо в режиме интегрирования.
П р и м е р ы устройств, соответствующих интегро-дифференцирующему
звену, показаны на рис. 4.13.
2
.ft
1)вых
R2
I
И
—
i
ивых
UBX
X
Рис. 4.13. Интегро - дифференцирующие звенья.
Г л а в а 5. Р а с ч е т э л е м е н т о в с и с т е м к о н т р о л я и а в т о м а т и з а ц и и
В
соответствии
со
стандартом
при
проектировании
систем
автоматизации в ы п о л н я ю т с я
расчеты р е г у л и р у ю щ и х д р о с с е л ь н ы х органов и
параметров н а с т р о й к и регуляторов на основе алгоритмических структурных
схем систем автоматического регулирования и управления [ 1 ] .
Расчет р е г у л и р у ю щ е г о дроссельного органа является весьма в а ж н ы м
этапом п р о е к т и р о в а н и я , п о з в о л я ю щ и й осуществить качественный в ы б о р
рабочей х а р а к т е р и с т и к и , изменить по необходимости рабочую характеристику
р е г у л и р у ю щ е г о органа и обеспечить в ы б о р исполнительного механизма.
Д р о с с е л ь н ы е р е г у л и р у ю щ и е органы ш и р о к о распространены в С А Р С Э У . Для
примера: х о д о в о й клапан турбины, питательный клапан, д р о с с е л ь н ы й клапан,
клапан Р У К , заслонка в системе Э Р Т и Р Т М и др. Расчету д р о с с е л ь н о г о
р е г у л и р у ю щ е г о органа, как правило, сопутствует расчет с у ж а ю щ и х устройств
для измерения расходов. Эти устройства являются одними из в а ж н е й ш и х
звеньев систем контроля.
В аналитических методах параметрической оптимизации А С Р задача
настройки регулятора связана с построением в плоскости параметров
настройки регулятора области заданного запаса устойчивости свободного
движения
замкнутой
АСР. Если
динамические
свойства
объекта
регулирования (передаточная функция) о п р е д е л е н ы в аналитической ф о р м е ,
то
предпочтение
следует
отдать
методу
расширенных
К Ч Х . Если
динамические
свойства
объекта
определены
экспериментально, то
предпочтение следует отдать методу м а к с и м у м а А Ч Х [411.
В практике наладочных работ ш и р о к о используют п р и б л и ж е н н ы е
ф о р м у л ы для определения оптимальных параметров настройки регуляторов
в
зависимости
от
параметров
моделей
объектов
регулирования
и
различных к р и т е р и е в оптимальности.
Наиболее
длительную
проверку
временем
выдержали
формулы,
п р е д л о ж е н н ы е В Т И . В качестве критерия параметрической о п т и м и з а ц и и в
формулах В Т И п р и н я т ы степень затухания и интегральная квадратичная
оценка качества, близкая к минимуму.
5.1. Р а с ч е т с у ж а ю щ и х у с т р о й с т в д л я и з м е р е н и я р а с х о д о в
Д л я измерения расхода ж и д к о с т и , п а р а и газа о б ы ч н о п р и м е н я ю т
стандартные д и а ф р а г м ы . Иногда для измерения расхода пара и д л я контроля
распределения дутья п о фурмам д о м е н н о й печи используют сопла. Д л я
контроля
расхода
рабочей
среды в судовых т р у б о п р о в о д н ы х системах
используют с о п л о В е н т у р и .
М е т о д и к а расчета с у ж а ю щ и х устройств основана на П р а в и л а х 28-64.
Исходные д а н н ы е для расчета следует представлять в виде л и с т а исходных
д а н н ы х , а сам р а с ч е т заключается в заполнении у н и ф и ц и р о в а н н ы х расчетных
листов [42].
Пист исходных
данных
Общие данные
1. З а в о д
2. Ц е х ... 3. Агрегат ... 4. Объект измерения ... 5. Среднее
. фронетрыческое давление местности р , Па.
б
Трубопровод
\ . Внутренний диаметр D o, м м . 2. Материал 3. Чертеж участка установки
с у ж а ю щ е г о устройства.
2
И з м е р я е м а я среда
1. Наименование
(марка,
сорт).
2.Часовой
(секундный)
расход:
максимальный M ^ , Qma*; средний М , Q ^ ; минимальный M ^ , Q ^ . З.Средняя
т ш п е р а т у р а t, ° С .
4.Среднее избыточное давление р„, П а . 5.Допустимая
осггеря давления р ' , П а . 6,Для газов: средний химический состав, % (объемн.);
относительная влажность ф' (при температуре ... и давлении . . . ) . 7.Для
жидкостей (кроме воды): плотность в нормальных условиях (+ 20 "С и 101 325
Па) р , к г / м ; вязкость (при температуре и давлении ...).
с р
n
пй
3
я
Указания
по заполнению
листа исходных
данных
1 .Среднее барометрическое давление местности рб = 100 00 + 101 325 Па.
2.Д и а м е т р трубопровода при 20 "С Djo выбирают по допустимой
скорости вещества в трубопроводе и (табл. 5.1).
Т а б л и ц а 5.1. Допустимые скорости вещества в трубопроводе
в
Избыточное Скорость
давление,
рабочих
Вещество
кПа
условиях, и, м/с
—
Жидкость
1,0-2,0
Газ
низкого
давления
(коксовый,
д о м е н н ы й , вентиляторный воздух)
С ж а т ы й газ (сжатый воздух, дутье
доменных
печей,
природный
газ,
технический кислород)
Насыщенный пар
Перегретый пар
2-5
2001500
6-12
12-20
—
20-30
—
30-40
П о выбранной скорости находят диаметр трубопровода, мм
D = m85-,/Q^>,
(5.1)
5
где
- м а к с и м а л ь н ы й расход вещества в рабочих условиях, м / ч .
Н а й д е н н у ю п о ф о р м у л е (5.1) величину о к р у г л я ю т д о б л и ж а й ш е г о
стандартного з н а ч е н и я : 50; 70; 80: 100; 125; 150; 175; 200; 225; 250; 300; 400;
450; 500; 600; 800; 1000; 1200: 1400; 1600; 2000; 2400; 3000; 3400; 4000 мм.
3. С р е д н и й р а с х о д составляет
( М ) « (1/2 ^ 2 / 3 ) 0 ^ , ( М ™ ) ;
м и н и м а л ь н ы й расход
с р
Qrnin ( V U ) » (1/4 + 1/3) C W ( K n i ) 4. Д о п у с т и м а я потеря давления, кПа:
при и з м е р е н и и расхода ж и д к о с т и , пара и сжатого газа р '
pVXO,05-0,10)p ;
п д
=10-5-
100 или
H
при и з м е р е н и и р а с х о д а газа низкого давления р ' = 0,5-^2 и л и р '
п в
п д
«
(0,2^0,4) р .
5. О т н о с и т е л ь н а я влажность газов ф ' : природного 0%; воздуха 60-80 %;
технического кислорода, д о м е н н о г о , коксового, с м е ш а н н о г о газов 100 %.
и
Расчетный лист № I
М а с с о в ы й р а с х о д ж и д к о с т и М, кг/ч.
1 . Д а н н ы е д л я расчета
A. С у ж а ю щ е е устройство.
1. Т и п .
2. М а т е р и а л .
3. П о п р а в о ч н ы й к о э ф ф и ц и е н т н а т е п л о в о е р а с ш и р е н и е к ; .
Б. Трубопровод.
1. П о п р а в о ч н ы й к о э ф ф и ц и е н т на т е п л о в о е р а с ш и р е н и е * " .
2. В н у т р е н н и й д и а м е т р , мм
B. И з м е р я е м а я среда.
1. Расчетный максимальный р а с х о д М , кг/ч.
С р е д н е е а б с о л ю т н о е давление, М П а
р = р + 0,1.
3. Расчетная допустимая потеря д а в л е н и я , П а
п
н
2
Ргтл^Р'п ^ ( И / М и и ) .
4. П л о т н о с т ь в рабочем состоянии р , к г / м .
5. К и н е м а т и ч е с к а я вязкость v, м / с , и л и динамическая вязкость и.
3
2
Пас.
Г. Д и ф м а н о м е т р .
1, Т и п .
2. В ы б о р п е р е п а д а д а в л е н и я н м о д у л я с у ж а ю щ е г о устройства
1. П р о м е ж у т о ч н а я величина
1
0.01252-D -Jp'
2. Предварительное значение предельного номинального перепада
д н ф м а н о м е т р а Ар'.
3. Предварительное значение модуля сужающего устройства m .
4. Число Рейнольдса для расхода:
расчетного
R
c
=
о,Э54 Г - ^ - ] = 0,354-f^i
среднего
fM
1м
минимального
Re. „ = Re,
M.
м,
граничное значение Re,,.
5. З а к л ю ч е н и е по числу Рейнольдса.
6. З а к л ю ч е н и е по д л и н е п р я м ы х участков.
7. Окончательное значение предельного номинального перепада
давления н а д и ф м а н о м е т р е Др, Па.
3,13 -С
е. т а = —р=г-л/ДР
9. Окончательное значение модуля т .
10. Потеря давления в с у ж а ю щ е м устройстве р , Па.
0
п
3. Д и а м е т р о т в е р с т и я с у ж а ю щ е г о у с т р о й с т в а , м м
1. d = D -Ут .
4. П р о в е р к а р а с ч е т а
1. Коэффициент расхода а .
2. М'„ =3,998-W- -a-u'-fi-fep
J
3. Погрешность расчета
М
5
=
М
"- "..оо%.
Расчетный лист № 2
Массовый расход пара М, кг/ч.
,кг/ч.
1 . Д а н н ы е д л я расчета
A. С у ж а ю щ е е у с т р о й с т в о .
[. Т и п .
2, М а т е р и а л .
3. П о п р а в о ч н ы й к о э ф ф и ц и е н т на т е п л о в о е р а с ш и р е н и е к,'.
Б. Паропровод.
1. П о п р а в о ч н ы й к о э ф ф и ц и е н т на т е п л о в о е р а с ш и р е н и е к " .
2. В н у т р е н н и й д и а м е т р , м м
D=D
3 0
k,".
B. П а р а м е т р ы пара.
1. Расчетный м а к с и м а л ь н ы й р а с х о д М , кг/ч.
п
2. К в а д р а т о т н о ш е н и я р а с х о д о в п = ( м / М ) " .
г р
я
3. С р е д н е е а б с о л ю т н о е д а в л е н и е , М П а
Р = Ри + 0,1.
4. Расчетная д о п у с т и м а я потеря д а в л е н и я , П а
p
1
n n
= p'n яСМп/Мщ») 5. П л о т н о с т ь р , к г / м .
э
6. П о к а з а т е л ь адиабаты, х,7. Д и н а м и ч е с к а я вязкость
Г. Дифманометр.
1. Т и п .
Пас.
2. В ы б о р перепада д а в л е н и я и м о д у л я с у ж а ю щ е г о у с т р о й с т в а
I . П р о м е ж у т о ч н а я величина
С=
м.
0,01252-D
!
VP
2. П р е д в а р и т е л ь н о е значение предельного н о м и н а л ь н о г о п е р е п а д а
давления на д и ф м а н о м е т р е Д р ' .
3. Предварительное значение модуля с у ж а ю щ е г о у с т р о й с т в а т " .
4. Ч и с л о Р е й н о л ь д с а для р а с х о д а :
расчетного
Re = 0.354-,
м.
среднего
(м
минимального
г р а н и ч н о е з н а ч е н и е Re,p.
1D0
5. Заключение по числу Рейнольдса.
6- З а к л ю ч е н и е по длине прямых участков.
7. Окончательное значение предельного номинального
давления на д н ф м а н о м е т р е Ар, Па,
———•
р
L
jf
перепада
.
р
8. Предварительное значение множителя
s' .
ct
9. т а ' = 3,13-С
/Др
соответствующие значения модуля т ' и множителя е .
Ш. Уточненное значение
ср
окончательное значение модуля m и поправочного множителя на расширение е.
11. Потеря давления в с у ж а ю щ е м устройстве р„, Па.
3. Д и а м е т р отверстия с у ж а ю щ е г о устройства, м м
1. d = D л/пТ .
4. Проверка расчета
1. К о э ф ф и ц и е н т расхода а .
2. Л*.'=3,998-] (Г ae-^Jp
JKp , кг/ч.
5
3. Погрешность расчета
M
M
». -- i.|0BS
м.
Расчетный
лист № 3
О б ъ е м н ы й расход газа, приведенный к нормальному состоянию (20°С,
0 , 1 М П а ) 0 „ , м /ч.
3
1, Д а н н ы е д л я расчета
А, С у ж а ю щ е е устройство.
1. Т и п .
2. Материал.
3. Поправочный коэффициент на тепловое расширение к ; .
Б . Трубопровод.
1. Поправочный коэффициент на тепловое расширение к " .
2. Внутренний диаметр, мм
D = D k;'.
M
В. Измеряемая среда
1. Н а з в а н и е газа.
2. Р а с ч е т н ы й м а к с и м а л ь н ы й р а с х о д Q „, м / ч .
3. К в а д р а т о т н о ш е н и я расходов
3
M
4. С р е д н я я абсолютная т е м п е р а т у р а , К
T=t+273.
5. С р е д н е е а б с о л ю т н о е д а в л е н и е , М П а
Р = Ри + Рб-
6. Расчетная допустимая потеря д а в л е н и я , Па
Рп а
=
2
Р'п л (QH I/QH.IMX) '
7. П л о т н о с т ь сухого газа в н о р м а л ь н о м состоянии р , к г / м .
8. М а к с и м а л ь н о е в о з м о ж н о е д а в л е н и е водяного пара р
т е м п е р а т у р е t, Па.
9. М а к с и м а л ь н а я возможная плотность водяного пара р
т е м п е р а т у р е t, к г / м .
10. О т н о с и т е л ь н а я влажность в д о л я х е д и н и ц ы ц>.
11. К о э ф ф и ц и е н т с ж и м а е м о с т и К.
12. П р о м е ж у т о ч н а я величина для определения р
z=l,02-H>- -(р-ф-РвпиУТ-К.
13. П л о т н о с т ь сухой части газа в рабочем состоянии, к г / м
р = 283,6 • Рн • z.
14. П л о т н о с т ь влажного газа в р а б о ч е м состоянии, к г / м
3
н
при
в п м
в п м
.
при
3
5
3
с г
3
Р = Рсг + <Р -РВ. ПМ
15. Показатель а д и а б а т ы , х16. К и н е м а т и ч е с к а я вязкость v , м / с , или д и н а м и ч е с к а я вязкость ц,
2
Па-с.
Г. Д и ф м а н о м е т р .
1. Т и п .
2. П л о т н о с т ь у р а в н о в е ш и в а ю щ е й ж и д к о с т и р , к г . м .
3. П л о т н о с т ь среды над у р а в н о в е ш и в а ю щ е й ж и д к о с т ь ю р ' , к г . м .
3
у
3
2.Выбор перепада давления и модуля сужающего устройства
1. П р о м е ж у т о ч н а я величина
1
3,553-D -z '
2. П р е д в а р и т е л ь н о е з н а ч е н и е предельного н о м и н а л ь н о г о п е р е п а д а
давления на д и ф м а н о м е т р е Д р ^ .
3. П р е д в а р и т е л ь н о е значение модуля с у ж а ю щ е г о устройства т " .
4. Ч и с л о Р е й н о л ь д с а для расхода:
расчетного
« . „ л . f ^ u - l = 0.354 • { - - " . - e \
Q
R
e
=
p
среднего
Rc
= Re| —
минимального
Re„.. = Rej
граничное значение Re,p.
5. З а к л ю ч е н и е п о числу Рейнольдса.
6. З а к л ю ч е н и е по д л и н е прямых участков.
7. Окончательное значение предельного н о м и н а л ь н о г о перепада
д а в л е н и я н а д и ф м з н о м е т р е Др„.
8. М а к с и м а л ь н ы й перепад на сужающем устройстве Д р
Ар
с р
=
Ар
Р
Р"
9. Предварительное значение множителя е ; .
р
10.
т а
==
,
с о о т в е т с т в у ю щ и е значения модуля т ' и множителя е .
11. Уточненное значение
ср
ma = m a ' ( e ; , / £ ) ;
( f
окончательное значение модуля m и поправочного множителя на
р а с ш и р е н и е s^.
12. Потеря давления в с у ж а ю щ е м устройстве р , П а .
п
3. Д и а м е т р отверстия с у ж а ю щ е г о устройства, м м
1. d = D
.
4. П р о в е р к а расчета
1. К о э ф ф и ц и е н т р а с х о д а а .
2. Q;„ =U-a-e-d*-z- /Ap/p , кг/ч.
1
3. П о г р е ш н о с т ь расчета
Указания
по заполнению
расчетных
листов
1. Р а с ч е т ы с л е д у е т выполнять с т о ч н о с т ь ю д о четвертой з н а ч а щ е й ц и ф р ы .
2. В н у т р е н н и й д и а м е т р трубопровода д о л ж е н б ы т ь не менее 50 м м .
3. В к а ч е с т в е материала сужающего устройства д л я х о л о д н о г о воздуха
можно п р и м е н я т ь С т 3, сталь 20, 12X13; д л я мазута - сталь 20; д л я в о д ы , газа,
пара, горячего в о з д у х а - 12Х18Н9Т.
4. В и н т е р в а л е о т - 2 0 д о +60 ° С к о э ф ф и ц и е н т k = 1. В о б щ е м случае k =
1 + a, (t - 20). В и н т е р в а л е о т 20 д о 600 °С д л я стали 20 а , = 1.38-10" К" , д л я
стали l X 1 8 H 9 T a ^ l . 7 4 1 0 К" .
t
t
5
s
1
1
Т а б л и ц а 5.2. П л о т н о с т ь воды
t,
°с
0
10
20
30
40
50
60
70
80
90
100
120
140
160
180
1
Плотность, кг/м при давлении, МПа
5
0,1
2
999,9
1000,8
1002,3
999,7
1000,6
1001,9
998,2
999,0
1000,3
995,6
997,8
996,5
992,2
994,4
993,1
988,0
988,9
990,1
983,2
984,2
985,4
977,8
978,7
980,0
971,8
972,8
974,0
965,3
966,3
967,6
—
959,2
960,7
—
945,4
944,0
—
887,6
865,0
928,5
909,9
889,4
867,1
220
—
—
240
260
—
280
300
—
—
927,0
908,2
8
1003,8
1003,3
1001,7
999,1
995,6
991,4
986,7
981,3
975,4
968,9
962,0
946,8
930,0
911,6
10
1004,8
1004,2
1002.5
999,9
996,4
992,4
987,6
982,2
976,3
969,8
963,0
947,9
931,1
912,7
891,3
869,2
892,7
842,6
841,5
—
815,3
784,3
846.7
820,2
—
—
—
818,3
788,1
753,1
—
—
200
—
-
—
870,7
790,5
756,3
715,4
5. Р а с ч е т н ы й максимальный расход М„
( Q ) , являющийся в е р х н и м
пределом и з м е р е н и я д и ф м а н о м е т р а , в ы б и р а ю т п о заданному м а к с и м а л ь н о м у
расходу как б л и ж а й ш е е б о л ь ш е е значение из с т а н д а р т н о г о ряда: 1; 1,25; 1,6; 2;
2,5; 3,2; 4; 5; 6,3; 8-10" - где п - л ю б о е целое п о л о ж и т е л ь н о е или о т р и ц а т е л ь н о е
число или н у л ь .
n
6. П л о т н о с т ь воды при температуре t и д а в л е н и и р находят по т а б л . 5.2,
перегретого пара - п о т а б л . 5.3.
П л о т н о с т ь ж и д к о с т и ( к г / м ) з а д а н н у ю п р и нормальной т е м п е р а т у р е t„
пересчитывают н а р а б о ч и е условия по ф о р м у л е
,
1
p = p„-[i - p . ( t - u i .
где р - средний коэффициент объемного расширения жидкости в интервале от
t^aot, К" .
Д л я мазута
В = (0,25-0.02-р)-КГ ,
где р — плотность мазута.
П л о т н о с т ь газов в нормальных условиях находят по табл. 5.4.
П л о т н о с т ь газовых смесей, кг/м , определяют по их химическому составу:
р = aip | + а р +•-. + ЭпРнп,
где Ли аг, ...,ап - объемные д о л и компонентов; р р . . , р„ - плотность
к о м п о н е н т о в смеси.
1
4
л
н
H
2
и 2
1 (
2 >
Т а б л и ц а 5.3. Плотность водяного пара
РА.
МПа
0,1
0,2
03
0,4
0,5
0,6
0,7
0,8
0,9
1.0
1,2
1.4
1,6
1.8
2,0
2,2
2,4
2,6
2.8
3,0
3.2
3.4
3,6
3,8
4,0
3
Плотность, кг/м , при температуре, °С
200
220
270
240
0,4515
0,4327
0,4156
0,3925
0,8344
0,7879
0,9076
0,8696
1,368
1,184
1,310
1,256
1,835
1,754
1,584
1,682
2,306
2,203
1,986
2,110
2,783
2,655
2,541
2,390
3,266
2,797
3,113
2,978
3,207
3,756
3,575
3,415
4,250
4,042
3,857
3,620
4,753
4,515
4,034
4,306
5,784
5,473
5,211
4,873
6,842
6,456
5,724
6,135
—
6,88
7,468
7,077
—
8,511
8,038
7,463
9,578
—
9,024
8,354
9,259
—
10,69
10.02
—
—
10,18
11,06
—
—
—
—
—
—
—
—
—
12,12
13,21
14,33
15,49
16.68
—
—
—
—
—
—
—
—
11,11
12,06
13,04
14,03
15,04
16,07
17,13
18,21
300
0,3416
0,7453
1,121
1,497
1,876
2,257
2,640
3,025
3,412
3,799
4,583
5,376
6Д77
6,988
7,806
8,636
9,479
10,33
11,19
12,06
12,95
13,85
14,76
15,68
16,62
350
0,3416
0,6845
1,028
1,374
1,720
2,068
2,417
2,767
3,119
3,417
4,181
4,895
5,615
6,341
7,072
7,812
8,554
9,302
10,06
10,82
11,59
12,36
13,15
13,94
14,74
400
0,3162
0,6331
0,9506
1,269
1,589
1,909
2,230
2,552
2,875
3,199
3,849
4,502
5,160
5,820
6,482
7,153
7,825
8,503
9,183
9,866
10,55
11,24
11,94
12,64
13,34
450
—
1,774
2,072
2.370
2,669
2,968
3,569
4,172
4,776
5,385
5,995
6,609
7,255
7,843
8,467
9,094
9,718
10,34
10,98
11,61
12,25
7.Относительную влажность <р в рабочих условиях (при Т и р ) вычисляют
по заданной влажности <р' (при Т ' и р') по формуле
р ' р.
п м
где р ; „ . о п р е д е л я ю т п р и Т ' и р ' .
М а к с и м а л ь н о е д а в л е н и е и плотность в о д я н о г о пара в газе н а х о д я т по
табл. 5.5.
8. Д л я газов н и з к о г о давления (р'„ < 0,1 М П а ) к о э ф ф и ц и е н т с ж и м а е м о с т и
К = 1.
Т а б л и ц а 5.4. П л о т н о с т ь газов при 20 °С и д а в л е н и и 0,1 М П а (760 мм рт. ст.)
Наименование
Воздух (сухой)
Кислород
Азот
Окись >тлерода
Двуокись углерода
Водород
Хими­
ческая
формула
—
о
N
СО
со
н
2
2
2
2
Т а б л и ц а 5.5. Д а в л е н и е р
(,°С
0
5
10
15
20
25
30
Pin«.
кПа
0,6106
0,8666
1,227
1,707
2,333
3,173
4,240
в п м
Плот­
ность
кг/м
1,205
1,331
1,166
1,165
1,842
0,0837
!
Водяной пар
Метан
Этилен
Этан
Сероводород
Сернистый газ
и плотность р
t,°C
кг/м
0,004847
0,006793
0,009398
0,01282
0,01729
0,02304
0,03036
Наименование
35
40
45
50
55
60
65
Р*пм,
кПа
5,626
7,373
9,586
12,35
15,73
19,92
25,00
в п м
Хими­
ческая
формула
Н 0
CHj
С2Н4
С2Н4
HS
SOz
2
2
Плот­
ность
кг/м
0,7496
0,6679
1,174
1,263
1,434
2,727
3
н а с ы щ е н н о г о водяного п а р а
Р . пи.
кг/м
0,03960
0,05115
0,06545
0,08302
0,1044
0,1302
0,1613
t, °с
3
70
75
80
85
90
95
100
кПа
31,16
38,54
47,34
57.81
70,10
84,51
101,33
Рапы.
кг/м
0,1982
0,2420
0,2933
0,3536
0,4235
0,504
0,5877
5
Д л я сжатых газов (воздуха, кислорода, п р и р о д н о г о газа - в о с н о в н о м ,
метана) величину К н а х о д я т по табл. 5.6.
9. Показатель а д и а б а т ы в нормальных условиях для воздуха р а в е н 1,4;
для кислорода 1,4; метана 1,31; коксового газа 1,37; д о м е н н о г о газа 1,39; пара
низкого давления 1,30 и для пара среднего давления 1,28.
10. Е д и н и ц ы у с л о в н о й вязкости °ВУ (градусы Энглера) в е д и н и ц ы
кинематической вязкости v , м / с , ( о б ы ч н о - для мазута) пересчитывают п о табл.
5.7. Д и н а м и ч е с к у ю вязкость воды и водяного пара находят по табл. 5.8 и 5.9,
газов - табл. 5.10.
11. Д н я газов р'=Ь9ЬЪр.
{Ь/Ё).
2
Т а б л и ц а 5.6. К о э ф ф и ц и е н т с ж и м а е м о с т и газов К
Доле­
вые
МПа
Воздух
04
1.0
14
2,0
2,5
3,0
Кислород
0,5
1,0
1,5
2,0
24
3,0
Метан
0,5
1.0
1,5
2,0
2,5
3,0
при
Коэффициент
сжимаемости
температуре, °С
0
50
-25
25
0,995
0,990
0,985
0,98)
0,977
0,973
—
—
0,990
0,973
0,956
0,939
0,922
0,905
1,000
0,097
0,994
0,991
0,988
0,985
1,000
0,999
0,998
0,996
0,994
0,992
1,000
1.000
1,000
1,000
1,000
1,000
0,995
0,990
0,985
0,980
0,975
0,970
0,997
0,994
0,991
0,988
0,985
0,982
0.999
0,997
0,995
0,994
0,992
0,991
0,989
0,978
0,967
0,956
0,945
0,934
0,991
0,982
0,973
0,964
0.955
0,946
0,994
0,988
0,982
0,876
0,970
0,964
Т а б л и ц а 5.7. П е р е с ч е т е д и н и ц условной вязкости "ВУ (градусов Энглера)
Z
в е д и н и ц ы к и н е м а т и ч е с к о й в я з к о с т и v, M / C
°ВУ
1,0
1.5
2,0
2,5
3,0
3,5
4,0
5,0
10*v
1.0
6,2
11,4
16,1
20,4
24,5
28,
36,2
°ВУ
6,0
7.0
8,0
9,0
10,0
12,0
14.0
16,0
П р и м е ч а н и е . П р и ° В У > 16 величина v = 7,4
10*v
43,8
51,5
59,0
66,6
74,0
89.0
104
118
1<Г*°ВУ.
Т а б л и ц а 5.8. Д и н а м и ч е с к а я вязкость в о д ы
и
°с
0
10
20
30
40
50
60
70
Динамическая
ц -10 , П а с , при
р £ 15
177,0
131,4
99,6
79,9
65,1
54,9
47,1
41,4
s
вязкость
р, МПа
15<р<35
173,6
128,0
100,0
80,4
65,7
55,4
47,7
41,4
t,
°С
80
90
100
150
200
250
300
350
Динамическая
вязкость
ц • 10 , П а с , прир, МПа
р£15
15 < р й 3 5
35,1
36,0
31,2
32,0
28,1
28,9
18,7
19,1
13,8
14,2
11,1
11,5
—
9,5
7,6
—
s
Т а б л и ц а 5.9. Д и н а м и ч е с к а я вязкость в о д я н о г о п а р а
t,
°с
100
150
200
250
300
5
Динамическая вязкость ц -10\
t,
П а с , при давлении, МПа
0,1
10
15
°С
—
—
350
1,20
—
—
1,39
400
—
—
1,58
450
—
—
500
1,78
—
1,99
2,13
Динамическая вязкость ц*10 , П а с ,
при давлении, МПа
0,1
10
15
2,21
2,31
2,80
2,41
2,50
2,63
2,64
2,71
2,79
2,86
2,93
2,99
Т а б л и ц а 5.10. Д и н а м и ч е с к а я вязкость газов при н о р м а л ь н о м д а в л е н и и
s
и
°с
Динамическая вязкость ц • 10 , П а с
метана
воздуха
кислорода
-50
0
+50
100
200
300
400
500
600
1,44
1,72
1,94
2,17
2,56
2,94
3,24
3,53
3,81
1,61
1,92
2,19
2,43
2,86
3,30
3,70
4,03
4,26
0,86
1,03
1,18
132
1,61
1,87
2,08
2,28
2,46
доменного
газа
коксового
газа
—
—
1,47
1,67
1,85
2,24
2,62
3,00
3,38
1,03
1,19
1,34
1,66
1,97
2,29
2,60
—
—
Рис. 5.1. Н о м о г р а м м а для определения предельного номинального
перепада давления дифманометра Д р и модуля диафрагмы гл.
н
Т а б л и ц а 5.11. Г р а н и ч н ы е значения числа РеЙнольдса для д и а ф р а г м ,
сопел и с о п е л Вентури
Re™-10*
П)
диафрагмы
0,05
0,10
0,15
0,20
0,25
0,30
0,35
2
3
4
5,5
7
9
11
сопла
и
сопла
Вентури
6
7
8
9
10,5
12
14
сопла
и
сопла
Вентури
16,5
18
19
19,5
20
20
20
m
диафрагмы
13
15,5
18,5
0,40
0,45
0,50
0,55
0,60
0,65
0,70
21
24
27
30
12. П р е д в а р и т е л ь н о е значение предельного перепада д а в л е н и я на
д и ф м а н о м е т р е для диафрагм Др'„ о п р е д е л я ю т по р и с . 5.1 с л е д у ю щ и м
образом.
Если задана величина потери давления в с у ж а ю щ е м устройстве, т о
находят точку на пересечении л и н и й , соответствующих з н а ч е н и ю потери
давления р
и величине С и п р и н и м а ю т по к р и в ы м б л и ж а й ш е е к этой точке
меньшее з н а ч е н и е п е р е п а д а Д р .
Если потеря давления не лимитирована, т о находят по н о м о г р а м м е
точку пересечения значения С с л и н и е й модуля m = 0,2 и в ы б и р а ю т
б л и ж а й ш е е к этой т о ч к е значение п е р е п а д а Др„. О д н о в р е м е н н о с Др„
о п р е д е л я ю т предварительное значение модуля т ' и п о т е р ю давления р .
13. А н а л и з приемлемости в ы б р а н н ы х значений перепада и модуля с
точки з р е н и я в л и я н и я вязкости (числа РеЙнольдса) в ы п о л н я ю т с л е д у ю щ и м
образом.
П о т а б л . 5.11 н а х о д я т Re^ и сравнивают с Re^. П о п р а в к и н а влияние
вязкости не вводят, если Re^, > й е . Если R e < Re^, т о желательно изменить
д и а м е т р т р у б о п р о в о д а или модуль m для уменьшения Re^.
14. Н е о б х о д и м ы е д л и н ы прямых участков т р у б о п р о в о д а д о 1] и после 1 ,
с у ж а ю щ е г о устройства зависят от вида местных с о п р о т и в л е н и й :
Перед сужающим
устройством
Одно колено или тройник
п д
н
п
ф
cp
2
m
0,05 0,10 0,2 0,3 0,4 0,5 0,6
I,/D
10
10
13
16 20
28
0,7
40
53
0,05 0,10 0,2 0,3 0,4 0,5 0,6
0,7
Группа колен в одной плоскости нлн разветвляющийся поток
m
li/D
14
[6
18 22
29
39
48
58
0,05 0,10 0,2 0,3 0,4 0,5 0,6
0,7
Группа колен а разных плоскостях или смешивающиеся потоки
ш
1|Л>
34
по
34
38
43
52
62
74
90
Полностью открытый вентиль
т.
0.05 0,10 0Л 0,3 0,4 0,5 0,6 0,7
ЬД>
18
ПОЛНОСТЬЮ
18
19 22 2 6 32 40 49
открытая задвижка
т.
0,05 0,10 0,2 0,3 0,4 0,5 0,6 0,7
1,/D
12
12
12 14 16 20 26 40
Сходящийся или расходящийся конус (конусность 1 : 3)
т.
0,05 0,10 0.2 0,3 0,4 0,5 0,6 0,7
li/D
16
16
18 20 23 26 30 32
Регулирующий клапан или неполностью открытые вентиль, задвижка
li/D2 100.
После сужающего
устройства
т
0,05 0,10 0,2 0,3 0,4 0,5 0,6 0,7
li/D
4
5
6 6,5
7 7.5 7,8
8
Д л и н ы 1) могут быть сокращены вдвое (но не менее 6D), при этом
возникает дополнительная погрешность < 0,5 %. Если использовать
с у ж а ю щ е е устройство с кольцевыми камерами, то 1| можно сократить в три
раза, п р и этом дополнительная погрешность < 1 % . Камерные диафрагмы
могут быть применены при D o < 500 м м .
15.Максимальный перепад в сужающем устройстве Ар зависит о т типа
дифманометра. При отсутствии разделительных сосудов для дифманометров
кольцевых, колокольных, мембранных н сильфонных Др = Д р ; для
поплавковых, заполненных маслом, над которым находится газ с р ' < 0,9
к г / м \ Др = Др„- , для поплавковых дифманометров; заполненных маслом, н а д
к о т о р ы м находится газ с р ' > 0,9 кг/м ,
2
и
3
Др = [1 - (р'/р,)] Д р ,
где Оу - плотность уравновешивающей жидкости.
П о п р а в о ч н ы й множитель е на расширение измеряемой среды для газов
и пара можно определить по номограмме, приведенной на рис. 5.2.
17. М о д у л ь m и коэффициент расхода а находят по величине т а , (табл.
5.12).
18. Потери давления н а диафрагме определяют по формуле
p *Ap-(l-m)-(Qm*/Q )
или п о номограмме, приведенной на рис. 5.2.
19. К значениям размеров стандартных сужающих устройств ставят
расчетные допуски:
m
<0,4
>0,4
Допуск
±0,00 Idjo ± 0,0005d
Допуск округляют в меньшую сторону д о двух значащих цифр.
н
2
H
n
20
in
20. П о г р е ш н о с т ь расчета 6 д о л ж н а б ы т ь не более 0,2 % . В противном
случае в н о с я т и с п р а в л е н и е в расчет.
Т а б л и ц а 5.12. М о д у л ь m и к о э ф ф и ц и е н т расхода а для с т а н д а р т н о й
диафрагмы
m
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
D - 50 мм
та
а
0,6126 0,03063
0,6162 0.06162
0,6219 0,09328
0,6293 0,1259
0,6385 0,1596
0,6492 0,1948
0,6617 0,2316
0,6764 0,2706
0,6938 0,3122
0,7134 0,3567
0,7355 0,4045
0,7608 0,4565
0,7909 0,5141
0,8270 0,5789
D = 100 мм
D = 200 мм
а
та
а
та
0,03045 0,6041
0,6090
0,03021
0.6118
0,06118 0,6069
0,06069
0,6169
0,09253 0,6117
0,09176
0,1237
0,6238
0,1248
0,6183
0,6325
0,1581
0,6267
0,1567
0,6428
0,1928
0,6368
0,1910
0,2271
0,6550
0,2292
0,6488
0,6695
0,2678
0,6631
0,2652
0,6863
0,3088
0,6798
0,3059
0,6987
0,7056
0,3528
0,3493
0,7272
0,4000
0,7201
0,3960
0,467
0,7445
0,7521
0,4513
0,5080
0,5026
0,7815
0,7733
0,5655
0,8169
0,5718
0,8079
D = 300 мм
а
0,6008
0,6034
0,6084
0,6150
0,6238
0,6340
0,6459
0,6600
0,6764
0,6950
0,7160
0,7398
0,7679
0,8019
та
0,03004
0,06034
0,09126
0,1230
0,1560
0,1902
0,2261
0,2640
0,3044
0,3475
0,3938
0,4439
0,492
0,5614
5.2. П р и м е р р а с ч е т а с у ж а ю щ е г о у с т р о й с т в а
Исходные данные
А г р е г а т - т е р м и ч е с к а я печь.
О б ъ е к т измерения - р а с х о д п р и р о д н о г о газа.
С р е д н е е б а р о м е т р и ч е с к о е д а в л е н и е местности Р = 1 0 1 3 2 5 П а .
0
Трубопровод
Внутренний диаметр - D =200 мм.
Материал - СтЗ.
И м е е т с я п р я м о й участок д л я у с т а н о в к и с у ж а ю щ е г о устройства.
Д л и н а у ч а с т к а I] + Ь = 4 м, в начале участка установлена п о л н о с т ь ю
открытая з а д в и ж к а .
20
И з м е р я е м а я среда
Наименование - инертный газ.
Ч а с о в о й р а с х о д - м а к с и м а л ь н ы й О н т и 1 5 0 0 м / ч а с ; средний QHC =800
м / ч а с ; м и н и м а л ь н ы й QHmin^OO м / ч а с .
С р е д н я я т е м п е р а т у р а t=20 ° С .
С р е д н е е и з б ы т о ч н о е д а в л е н и е Р н 2 0 кПа.
С р е д н и й состав газа : 98% С Н ; 0,5% С Н ; 1,5% N ; (f>=0.
=
3
P
3
3
=
4
2
6
2
Ар/Р
О
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0,1
т €0,05
0,90
0,91
0,92
0,93
0,94
0,95
0,96
0,97
0,98
0,99
Р и с . 5 . 2 . Номограмма для определения поправочного множителя е
на расширение измеряемой среды для диафрагм.
из
S
Расчетный
лист
1. Д а н н ы е д л я расчета
A. Сужающее устройство:
Т и п - с т а н д а р т н а я камерная д и а ф р а г м а
М а т е р и а л - сталь марки X I 7
П о п р а в о ч н ы й к о э ф ф и ц и е н т н а т е п л о в о е р а с ш и р е н и е К ' , = 1.
Б. Т р у б о п р о в о д :
П о п р а в о ч н ы й к о э ф ф и ц и е н т на т е п л о в о е р а с ш и р е н и е К " = 1
В н у т р е н н и й д и а м е т р D=200-1=200 м м .
B. И з м е р я е м а я среда:
Н а и м е н о в а н и е - п р и р о д н ы й газ
Р а с ч е т н ы й м а к с и м а л ь н ы й р а с х о д 0_н.п
1600 мЗ/час.
К в а д р а т о т н о ш е н и я расходов
И=
ГЖУ ,25.
=0
ueooj
Средняя абсолютная температура
Т = 20 + 273 = 293 К.
Среднее абсолютное давление
Р = 20 + 103,3 = 123,3 кПа.
Расчетная допустимая потеря д а в л е н и я
^ . Г М . а д а
кПа.
П л о т н о с т ь газа в нормальном с о с т о я н и и
3
р„=0,98 • 0,6679 + 0,005 • 1,263 + 0,015 • 1,66 - 0,6788 к г / м .
К о э ф ф и ц и е н т с ж и м а е м о с т и К = 1.
П р о м е ж у т о ч н а я величина
,
=
J L , U 3 L M > 1 W ™ > 1 . ,00420 .
Т К
293-1
П л о т н о с т ь газа в рабочем состоянии
0
8
3
р = 283,6 • 0,6788 • 0,004208 = 0,81 к г / м .
Показатель адиабаты:
%=\,Ъ2.
Д и н а м и ч е с к а я вязкость газа
5
ц = 1,09 - 10" П а - с .
Г. Д и ф м а н о м е т р :
Тип - мембранный.
2. В ы б о р перепада д а в л е н и я и м о д у л я д и а ф р а г м ы
П р о м е ж у т о ч н а я величина
3,553-200* 0,004208
Предварительное значение предельного номинального перепада
давления н а д и ф м а н о м е т р е
АР V 2,5 кПа.
Предварительное значение модуля диафрагмы т ' = 0 , 2 4 .
Число Р е й н о л ь д с а :
для расчетного р а с х о д а
^ 0 , 3 5 4 . ^ ^ 0 , 3 5 4 . '«»-^788
D fj
200 1,09 10
д л я среднего расхода
О АЛ
Re,, = 176500 • — = 88250;
1600
для минимального расхода
=
5
Re™ = 176500•
= 66250 .
1600
Граничное значение Rerp=67000.
З а к л ю ч е н и е по числу Рейнольдса: расход во всем рабочем
диапазоне измеряют, не учитывая поправки на влияние вязкости (так как
Re,,*,« Я е ) .
З а к л ю ч е н и е по д л и н е п р я м ы х участков: для установки диафрагмы
требуется п р я м о й участок /,/0=13 и IJD = 6,25, т.е. I I +12 = 19,25 - D=3,95 м,
ч т о н е п р е в ы ш а е т имеющегося участка.
ф
Окончательное значение предельного номинального
давления н а д и ф м а н о м е т р е ДР„=2,5 кПа.
перепада
М а к с и м а л ь н ы й перепад на дифманометре ДР„= 2,5 кПа.
^-=^5=0,005068.
р
123,3
Предварительное значение множителя е
та
г
с р
= 0,9975.
=—Ц = = = 0,1523 0,9975 V2500
Соответствующее значение модуля т ' = 0,2434 и множителя
=
0,9974.
Уточненное значение
0 9975
т • а = 0,1523 •
= 0,1523 0,9974
Окончательное значение модуля m = 0,2434 и поправочного
м н о ж и т е л я н а р а с ш и р е н и е е = 0,9974.
Потеря давления н а диафрагме
е р
= 2 , 5 - 0 - 0 , 2 4 3 4 ) - f i ^ l =1.685 кПа.
^I600)
3. Д и а м е т р о т в е р с т и я д и а ф р а г м ы
d - 200 V0,2434= 98,70 M M .
^ = — ^
= 98,7 + 0,1 M M .
4.Проверка расчета
К о э ф ф и ц и е н т р а с х о д а а = 0,6256.
г
0: =Ш-О,6256-О,9974-(98,7О) -О,ОО42О8- / — = 1599 м*/час.
я
П о г р е ш н о с т ь расчета
1600
5.3. Расчет д р о с с е л ь н ы х р е г у л и р у ю щ и х о р г а н о в
и выбор исполнительных механизмов
Выбор рабочей
характеристики
регулирующего
органа
Статической р а б о ч е й расходной характеристикой р е г у л и р у ю щ е г о
органа, к о т о р у ю в д а л ь н е й ш е м будем называть рабочей характеристикой,
является зависимость м е ж д у выходной х
и входной х
величинами
регулирующего
органа.
Выходная
величина
абсолютный
Q
или
относительный q = Q/Qnu, расход регулирующей с р е д ы ; входная - угол
поворота ф р и л и л и н е й н о е перемещение (ход) h
р е г у л и р у ю щ е г о органа;
часто х
д а ю т в о т н о с и т е л ь н ы х величинах и н а з ы в а ю т степенью о т к р ы т и я
регулирующего органа [42]:
№ х р 0
0
ю
П
р
м р о
p o
о
^ Ф ^ / Ч ы т т ИЛИ П ^ П ^ / п ^ .
Если р е г у л и р у ю щ и й орган рассматривают как часть регулируемого
о б ъ е к т а , т о Х в х р о ^ Х и о б ^ У, % хода регулирующего органа.
Правильно в ы б р а н н ы й регулирующий орган не д о л ж е н у х у д ш а т ь
характеристик, и м о ж е т б ы т ь средством устранения некоторой нелинейности
статической х а р а к т е р и с т и к и агрегата. К о э ф ф и ц и е н т передачи объекта
регулирования коб м о ж н о представить как произведение к о э ф ф и ц и е н т о в
передачи агрегата к „ и д р о с с е л ь н о г о регулирующего органа к . : кёб = к*гкр .
При в ы б о р е р е г у л и р у ю щ е г о органа следует исходить из необходимости
получения
const в о всем диапазоне регулирования. П р и в ы р а ж е н и и
р
=
Мб
0
0
регулируемой
величины
и
хода
регулирующего
органа
в
долях
М и н и м а л ь н о г о значения или в процентах необходимого, чтобы 1 ^ = 1 .
К о э ф ф и ц и е н т ы передачи р а в н ы :
о 6
<4q
Дп
Jtp = ДоУДп,
D
rne Дх - изменение значення регулируемой величины; Дп - изменение
с т е п е н и открытия регулирующего органа в безразмерных единицах или в %
хода регулирующего органа; Aq - изменение относительного расхода среды в
безразмерных единицах или в процентах.
Если статическая характеристика агрегата линейная, т о рабочая
расходная характеристика регулирующего органа т а к ж е должна быть
линейной. Если статическая характеристика агрегата нелинейна, то рабочая
характеристика регулирующего органа должна быть ее зеркальным
отображением (рис. 5.3).
а)
б)
е)
Рис. 5.3. Статические характеристики:
а - агрегата; б - регулирующего органа; в - объекта.
Последовательность
расчета регулирующих
органов
Излагаемая методика расчета применима для регулирующих органов
существующего или спроектированного агрегата, когда источник давления
задан [42].
для регулирования расходов газов при низких давлениях используют
п о в о р о т н ы е заслонки и ш и б е р ы . Регулирование расходов ж и д к о с т е й и газов
при в ы с о к и х д а в л е н и я х (> 1О к П а ) осуществляется
регулирующими
клапанами и к р а н а м и , а и н о г д а п о в о р о т н ы м и заслонками.
Расчет д р о с с е л ь н ы х р е г у л и р у ю щ и х органов сводится к з а п о л н е н и ю
р а с ч е т н ы х л и с т о в , п р и в е д е н н о й н и ж е ф о р м ы [42]. Д а н н ы е н е к о т о р ы х т и п о в
р е г у л и р у ю щ и х органов п р и в е д е н ы в табл. 5.13.
Лист исходных
данных
О б щ и е д а н н ы е : 1. Завод. 2. Ц е х . 3. Агрегат. 4. В и д рабочей расходной
характеристики.
Трубопровод:
1. М а т е р и а л .
2.
Чертеж
расчетного
участка
трубопровода.
Р е г у л и р у е м а я с р е д а : 1. Н а и м е н о в а н и е . 2. Часовой (секундный)
о б ъ е м н ы й или м а с с о в ы й расход Q
, М ^ п р и н о р м а л ь н ы х у с л о в и я х . 3.
Т е м п е р а т у р а t, ° С . 4. И з б ы т о ч н о е д а в л е н и е в начале участка р
, П а . 5.
И з б ы т о ч н о е д а в л е н и е в конце участка р„«ж., П а . 6. Д л я газов: средний
х и м и ч е с к и й состав, % (объемн). 7 Д л я ж и д к о с т е й : плотность р , к г / м п р и
н о р м а л ь н ы х условиях ( 2 0 ° С и 101325 П а или 760 м м рт. ст.); вязкость при
н о р м а л ь н ы х условиях.
№ 1 (
н н м
3
н
Таблица 5.13. Характеристика р е г у л и р у ю щ и х клапанов и п о в о р о т н ы х
заслонок
Тип регулирующего Рабочее
органа
давление,
кПа
Темпера­
тура,
°С
Клапаны:
ПКН
50
120
К, КР, КЯ, КРЯ
25ч30нж, 25ч32нж
1 Поворотные
слонки:
ПРЗ
змс
640
160
200
300
| D , мм
y
Среда
50, 100,200
Жидкость,
(газ не агрес­
сивные
15, 20,25, 40 Т о ж е
40, 50, 80, »
100, 150, 200,
250, 300
(привод
Мембран­
ный пневмо­
привод
Тоже
>
за­
25
300
10
300
100, 125, 150, Воздух, газ
175, 200, 225,
250, 300, 350,
400,450, 500
30, 40, 50, 70, Т о ж е
90
Без привода
То же
Указания
по заполнению
листа исходных
данных
ЦРабочую характеристику
регулирующего органа в ы б и р а ю т в
соответствии с приведенными в ы ш е правилами и задают в графическом виде.
2Л*асчетным участком считают часть трубопровода между точками с
постоянными не зависящими о т расхода давлениями. Например, участок о т
магистрального газопровода с постоянным давлением р , д о печи с
давлением p „ , равным атмосферному. В расчетный участок включают
горелку, форсунку и т. д.
м м
M
Расчетный
лист
1. Д а н н ы е д л я р а с ч е т а
1. Расчетный максимальный расход при нормальных условиях
Q ' ^ ^ C U - t ^ l Q ^ или M ' « « = ( U + 1,2) ^ .
2. А б с о л ю т н о е давление в начале участка р
= р „ + 101325 Па.
3. А б с о л ю т н о е давление в конце участка р „ „ = р
+ 101325 П а .
4. Абсолютная температура среды Т = (t + 273) К.
5- Д и а м е т р трубопровода D ^ , м м .
н а ч
н н
нк о н
2. О п р е д е л е н и е п е р е п а д а д а в л е н и я в д р о с с е л ь н о м р е г у л и р у ю щ е м
органе п р н м а к с и м а л ь н о м расходе
1. Расчетный максимальный расход среды прн Рыч И Т,,,,, M /ч
Q max»мч ~ Om»t н " Рн^ыЛ.Рнач"^ я)
2. Плотность среды при р
и Т
из расчета сужающего
устройства р , к г / м .
3. Вязкость среды из расчета сужающего устройства v „ , м / с ,
или Цмп, П а с .
4. С к о р о с т ь в трубопроводе, м/с:
д л я газов
354 • Q
/ D jpj
для жидкостей и пара
н а ч
н а ч
3
и 1 ч
2
m
=
H a 4
и « ч = 354 - М ' ^
м
ч
ф\-р
н
а
ч
).
5. Число Рейнольдса:
для газов
R e =0,354- Q ' ^ ^ / ( D . p - v „ ) = 0,354 • Q'™*
• р„ / ( D ^ -р );
для жидкостей и пара
R e „ „ =0,354- М'пым
- р ) = 0,354 • М ^ ^ / ф ^ - р . ^ ) ;
M 4
4
№ Ч
1Ч
нач
и а ч
6- К о э ф ф и ц и е н т трения для части трубопровода от начала д о
регулирующего органа:
для круглых стальных труб при ламинарном режиме (Re <. 2300)
X=64/Re;
(5.2)
п р и т у р б у л е н т н о м р е ж и м е (Re >2300)
X=l/(2-lgl9,5-D ) .
7.Потери
давления
на
трение
для
р е г у л и р у ю щ е г о о р г а н а на д л и н е L Па:
Ap =X-L-u p/(2-D );
2
T p
части
(5.3)
трубопровода
до
l t
2
T
(5.4)
T p
Т а б л и ц а 5.14. К о э ф ф и ц и е н т ы с о п р о т и в л е н и я р а с п р о с т р а н е н н ы х т и п о в
местных с о п р о т и в л е н и й
К какой
Тип местного сопротивления
Значение коэффициента С,
скорости
наименование эскиз
отнесен
1. Внезапное
сужение
С = 0,5 - ^1 - -p-j
при выходе из большого
пространства Л= °°, С = 0,5
2.Внезапное
расширение
С, = ^1 -
при входе в большое пространство
"1
Постепенное
сужение
/•«= =о, С = 1
Величину £ по п. 2 умножают на коэффициент
К:
а, град
S 10 20 30 45
К
0,082 0,167 0,425 0,80 1,0
При а < 20° величина С, = 0;
а = 20- 45° величина С, = 0,1 ;
а > 45 величину С, берут по п. 1
5.Простое
колено
а, град
С
20 40 60 80 90 100
0.05 0,2 0,5 0,9 1,15 1,2
U|
6.Сложное
колено
С
x/d
1 2 3 4 5 6
0,37 0,28 0,35 0,38 0,40
"1
0,75 1,0 1,5 2,0 3,0
0.45 0,25 0,17 0,15 0,12
U|
3.
Постепенное
расширение
4.
U|
Ог
е
0,42
7.Плавный
поворот ПОД
прямым углом
r/d
;
8. Запорная
задвижка
h/d
<;
1 0,8 0,6 0.4
0,2 0,8 2,8 11
h/d
0,2 0,3 0,4 0,5 0,6 0,8
9.Выход через
систему
каналов
(решетку)
N
1
С
"1
70 30 15 9
7
3 1
в.Сумма коэффициентов местных сопротивлений (табл.5.14) для части
т р у б о п р о в о д а до регулирующего органа
9. П о т е р и в местных сопротивлениях для части трубопровода до
регулирующего органа, Па
Др = С(о /2)р;
(5.5)
2
м
=
Дрм! 2 C l ( ° иач /2) р „ , .
10. П о т е р и давления в результате изменения уровня
трубопровода от начала до регулирующего органа. Па
расположения
Дры = Pn*igH|.
11. Потери давления до регулирующего органа, Па
Др1 = Д р + Д р 1 + Д р п .
12. А б с о л ю т н о е давление перед регулирующим органом, П а
т 1
М
Pi = Рим - Арь
13. М а к с и м а л ь н ы й р а с х о д среды для условий после регулирующего
органа п р и р и Т ; принимаем рг = р , - (0,3-^0,4) ( р ^ - р ) , м / ч
3
2
2
м н
Q:.,=Q:...ff.
Рг 14. П л о т н о с т ь среды при р и Т , к г / м
т
2
3
2
Р , = Р , - ^ .
(5-6)
2
15. Вязкость среды при р и Т , v , м / с или ц , П а с
16. С к о р о с т ь в трубопроводе, м/с:
для газов
o = 354Q'
/D ;
для ж и д к о с т е й и пара
и = 354М'
Л) р .
17. Ч и с л о Рейнольдса:
для газов
2
2
2
2
2
2
n u x 2
i p
2
г
п ш 2
т р
2
Q
R
e
j
J
P j
= 0 , 3 5 4 - - ^ - = 0.354 - ™ " '
I V v,
D -u,
•
T p
д л я ж и д к о с т е й и пара
Re, = 0,354 •
M
1
j
"
= 0.354 - M k l ^ L
D „-p -v,
D -щ
T
2
18. К о э ф ф и ц и е н т трения для части трубопровода после регулирующего
органа определяют по формуле (5.2) или (5.3).
19. Потери давления на трение для части трубопровода после
регулирующего органа L , Па
2
20. С у м м а к о э ф ф и ц и е н т о в м е с т н ы х сопротивлений (см. табл. 5.14) для
части т р у б о п р о в о д а после регулирующего органа
ЕС, =с;+с;+-+<:
2 1 . П о т е р и давления в местных сопротивлениях для части т р у б о п р о в о д а
после р е г у л и р у ю щ е г о органа о п р е д е л я ю т по ф о р м у л е , П а
Др*2 = £ £ 2 (*Л/2) р 2 •
22. П о т е р и давления на в ы х о д е из расчетного участка. П р и истечении
газов ч е р е з сопла потери определяют по р и с . 5.4.
1200
,
,
Избыточное давление перед соплом
(потери давления в сопле), МПа
Рис. 5.4. Расход газа (при н о р м а л ь н ы х условиях) и пара через
м и н и м а л ь н о г о сечения сопла:
1 см
1 - воздух при 20°С, 2 - воздух при 200°С; 3 -кислород при 20 °С; 4- природный газ при
20 "С, 5 - перегретый пар при 300°С.
23.Потери давления вследствие с н и ж е н и я уровня р а с п о л о ж е н и я
т р у б о п р о в о д а от регулирующего органа д о конца расчетного участка. Па
3
24. Потери давления после регулирующего органа, Па
+
Дрз = Дртз + Др«2 + Д р .
Ары25. С у м м а р н ы е потери давления н а рабочем участке без регулирующего
органа, Па
ДРс = ДР| Р 2 26. П е р е п а д давления в дроссельном регулирующем органе при
максимальном расчетном расходе, Па
т
+
ДРр = рн«ч
А
-
Р«он - Др<: •
3. В ы б о р р а з м е р а р е г у л и р у ю щ е г о о р г а н а
1. М а к с и м а: л ь н ы й расход в условиях перед регулирующим органом
рЛ,
Q:..,=Q:..
т
р.- .
2. Плотность среды для условий перед регулирующим органом, кг/м
Pi
=
3
Рн»ч'р1 Тнэ^Рнач-Т!) .
3. Поправочный множитель на уменьшение плотности для газов и пара
е находят по рис. 5.5.
4. Число РеЙнольдса (для с м о л ы и мазута)
Re. =0,354
— .
5. Поправочный множитель н а вязкость \у (для смолы и мазута) при
1 находят по рис. 5.6.
6. Э ф ф е к т и в н о е проходное сечение, соответствующее расчетному
максимальному расходу, м :
для газа
rVFw
=
2
О Р
_ ^ .
5095-Е
=
EI;
}JAp
(5J)
p
для ж и д к о с т и и пара
aF =
М
™'
(5.8)
где а - коэффициент расхода, зависящий о т конструкции и степени открытия
регулирующего органа.
7. Задаются максимальным открытием регулирующего органа,
соответствующим расчетному максимальному расходу.
8. О п р е д е л я ю т a F / F ^ и л и ctF/F по рис. 5.7.
9. Максимальная площадь проходного отверстия F ' ^ для клапанов и
F'y для поворотных заслонок и шиберов, м ,
y
2
с,
aF
F ^ _ = -( a F / F ^ )^* или
aF
F;' = («F/F
y
1,0
I
0
0,9
1
0,1
0,8
I
0,2
0,7
I
0,3
0,9
i
0,4
0,S Р,/р
'
i*
0,5 AP/P
t
Рис. 5 5. График для определения
поправочного
множителя
с,
учитывающего изменение плотности
газа или пара при протекании через
регулирующий орган
Рис. 5.6. График для определения
поправочного
множителя
ц/,
учитывающего
влияние
мзкости
вещества,
протекающего
через
регулирующий орган
10. D ' д л я п о в о р о т н ы х заслонок, м,
y
11. Д и а м е т р у с л о в н о г о п р о х о д а з а с л о н к и D , м м .
12. М а к с и м а л ь н а я п л о щ а д ь п р о х о д н о г о отверстия при п р и н я т о й D , м
y
г
y
?
г
=0,785 10-* Dl .
4. П о с т р о е н и е р а б о ч е й х а р а к т е р и с т и к и
1. Задаются несколькими з н а ч е н и я м и р а с х о д а Qj в пределах о т
до
Qmv и о п р е д е л я ю т потери давления на дроссельном р е г у л и р у ю щ е м
органеДр .
р
2. Н а х о д я т давление перед р е г у л и р у ю щ и м органом p .
3. О п р е д е л я ю т ч и с л о РеЙнольдса (для с м о л ы и мазута)
ti
Рнс.5.7. Г р а ф и к д л я определения эффективного сечения:
а - клапанов (1 - конических и дроссельных; 2 - двух седельных; 3 - прочих); 6 поворотных заслонок (1 - однолопастных круглых и прямоугольных', многолопастных с
разделительным и перегородками; 2 - двухлопастных жалюзи; 3 - трехлопастных
жалюзи); в - шиберов (1 - в прямоугольном канале; 2 - в круглом канале).
4. Н а х о д я т поправку на вязкость у; п о рис. 5.6.
5. О п р е д е л я ю т расход среды Q для условий перед регулирующим
органом.
6. Устанавливают относительный перепад давления на регулирующем
органе д . / р .
u
Р р
| {
7. Н а х о д я т поправку на у м е н ь ш е н и е плотности газа или пара £;.
8. Рассчитывают плотность с р е д ы перед регулирующим органом рц.
9. О п р е д е л я ю т эффективное проходное сечение, соответствующее
м*:
д л я газа
для п а р а и ж и д к о с т и
М
aF =
5095-е,
ЧТ-У^Рь
10. Рассчитывают эффективное относительное проходное сечение
Дроссельного р е г у л и р у ю щ е г о органа при Q,: aF-JF^ и aFj/F .
11. О п р е д е л я ю т относительное открытие клапана по отверстию F / F ^
или угол п о в о р о т а заслонки п о р и с . 5.7.
12.0пределяют
расход
среды,
проходящей
через
закрытый
Регулирующий орган Q .
y
0
13. С т р о я т
органа.
рабочую
характеристику
дроссельного
регулирующего
14. С р а в н и в а ю т п о л у ч е н н у ю характеристику с заданной.
Указания
по заполнению
расчетного
листа
1. П л о т н о с т ь и вязкость газов, пара и воды при н о р м а л ь н ы х и рабочих
условиях н а х о д я т в соответствии с указаниями, п р и в е д е н н ы м и в п а р а г р а ф е
5.1 д а н н о й г л а в ы . П л о т н о с т ь мазута находят по табл. 5.15, вязкость по р и с .
5.8.
2. К о э ф ф и ц и е н т трения и потери давления на т р е н и е Др,- о п р е д е л я ю т
отдельно для у ч а с т к о в д о р е г у л и р у ю щ е г о органа и после него. Е с л и D,p
изменяется, т о потери давления на т р е н и е с ч и т а ю т отдельно для к а ж д о г о
участка с р а з н ы м D^,.
П р и расчете п о т е р ь д а в л е н и я н е о б х о д и м о знать перепад д а в л е н и я н а
р е г у л и р у ю щ е м о р г а н е при м а к с и м а л ь н о м расчетном р а с х о д е с р е д ы .
П р и н и м а ю т , ч т о э т и потери составляют 30-40 % о т (р„а - p„, ), т. е. д а в л е н и е
после р е г у л и р у ю щ е г о о р г а н а р = Pi - (0,3 * 0,4) ( р
- р ) Па.
Ч
2
н в ч
H
к о н
Е с л и р2, п о л у ч е н н о е в результате д а л ь н е й ш и х расчетов, будет
значительно отличаться о т принятого, т о потери давления п е р е с ч и т ы в а ю т ,
задаваясь д р у г и м п е р е п а д о м на р е г у л и р у ю щ е м органе.
Для газов н и з к о г о давления и для ж и д к о с т е й расчет потерь д а в л е н и я н а
т р е н и е и в м е с т н ы х сопротивлениях м о ж н о вести д л я всего р а с ч е т н о г о
участка ( п р и п о с т о я н н о м D ^ ) , считая с к о р о с т ь , вязкость и плотность с р е д ы
равными в е л и ч и н а м м , v
ир^.
тч
H B 4
Т а б л и ц а 5.15. П л о т н о с т ь мазута п р и р а з л и ч н ы х температурах, к г / м
Темпера­
тура, °С
20
30
40
50
60
Марки мазута
10
20
40
80
900
894
888
882
876
950
944
938
932
926
1000
995
990
985
980
930
924
918
912
906
Темпера­
тура, °С
70
80
90
100
Марки
10
870
864
858
852
мазута
20
900
894
888
882
40
920
915
910
905
3
80
975
971
966
962
3.Потери д а в л е н и я , обусловленные изменением уровня р а с п о л о ж е н и я
т р у б о п р о в о д а , о п р е д е л я ю т для ж и д к о с т е й и горячих газов. Д л я других газов и
пара этими п о т е р я м и м о ж н о пренебречь.
4 . 0 т н о с и т е л ь н ы Й х о д р е г у л и р у ю щ е г о о р г а н а д о л ж е н находиться в
пределах 0,1 < п < 0,9 п р и изменении р а с х о д а о т Q„^„ д о C W Дня к л а п а н о в м о ж н о считать, что Q = 0 при п = 0. Д л я п о в о р о т н ы х
заслонок Q * 0, т а к как между к р ы л о м и корпусом есть зазор. П р и расчетах
зазор п р и н и м а ю т р а в н ы м 0,002 D . К о э ф ф и ц и е н т расхода для п о л н о с т ь ю
закрытой заслонки а = 3
0
0
y
с
,/p. =0,0001-Dj-e /A
ON
Ppe
/p
3
H
м /ч;
M„ =0.0001-Dj е / Д р ^ Г ~ р Г кг/ч.
вЛ
5. Д л я круглых поворотных заслонок полученный расчетом диаметр
округляют до стандартного б л и ж а й ш е г о значения, мм: 25, 32, 40, 50, 70, 80,
100,125, 150, 175, 200, 225, 250, 300, 400, 500 600, 700, 800, 1000, 1200, 1400.
Для п р я м о у г о л ь н ы х поворотных заслонок по F определяют геометрические
размеры.
y
20
30
40
50
60
70
80
90
Тшпература, 'С
100 110 120 130
Р и с . 5.8. И з м е н е н и е вязкости мазута в зависимости от т е м п е р а т у р ы :
1 - мазут 100; 2 - мазут 80; 3 - мазут 60. 4 - мазут 40; 5 - мазут 20.
Изменение
рабочей
характеристики
регулирующего
органа
Е с л и полученная рабочая характеристика регулирующего органа
совпадает с заданной, то сочленение исполнительного механизма с
Р е г у л и р у ю щ и м органом в ы п о л н я ю т так, чтобы их перемещения были
пропорциональн ы.
Если р а б о ч и е характеристики не совпадают, т о о с у щ е с т в л я ю т
перепрофилирование
плунжера
клапана
(при
этом
сохраняют
пропорциональность
перемещения
исполнительного
механизма
и
регулирующего
органа)
или
осуществляют
такое
сочленение
исполнительного м е х а н и з м а с р е г у л и р у ю щ и м о р г а н о м , при котором
зависимость х „ = / ( х „ ) обеспечивает получение заданной рабочей
характеристики. П р и п р и м е н е н и и поворотных з а с л о н о к возможен т о л ь к о
второй способ изменения характеристики.
и р
в ы х
м
Рис. 5.9. Ж е с т к о е с о ч л е н е н и е клапана с и с п о л н и т е л ь н ы м механизмом:
а и б - кинематические схемы; в - зависимость степени открытия клапана п от угла
поворота вала исполнительного механизма <р; 1 - схема «а»; 2 - схема «б».
Н а р и с . 5.9 показано жесткое сочленение клапана с исполнительным
механизмом. Д л и н у р ы ч а г а в ы б и р а ю т таким образом, ч т о б ы повороту вала н а
90° соответствовал п о л н ы й х о д клапана. С о о т н о ш е н и е д л и н рычагов м о ж н о
найти п о п р и б л и ж е н н о й ф о р м у л е а/о = O ^ l - h ^ A v .
При с о ч л е н е н и и , и з о б р а ж е н н о м н а рис. 5.9 а, п е р е м е щ е н и е клапана
практически п р о п о р ц и о н а л ь н о углу поворота исполнительного механизма.
Е с л и соединение в ы п о л н и т ь п о рис. 5.96, т о степень открытия клапана п h/hnux связана с углом поворота вала исполнительного м е х а н и з м а нелинейной
зависимостью ( р и с . 5.9в). Используя т а к о е с о ч л е н е н и е , м о ж н о приблизить
расчетную рабочую характеристику к заданной.
Управляя р е г у л и р у ю щ и м органом при п о м о щ и кулачка, насаженного н а
вал исполнительного механизма (рис. 5.10), м о ж н о получить н у ж н у ю
рабочую
характеристику
комплекта
исполнительный
м е х а н и з м - р е г у л и р у ю щ и й орган q = / (<р„ ) при л ю б о й зависимости q = / (п).
м
Ось п о в о р о т н о й
заслонки
Рнс.
5.10.Сочленение
исполнительного
механизма
с
регулирующим
органом при п о м о щ и кулачка:
* - шибер; б - клапан; в - поворотная заслонка.
Длд получения пропорциональной зависимости степени открытия
клапана n = * / h
или угла поворота заслонки ( р от угла поворота вала
иотолнительного механизма <р нужно, чтобы радиус кулачка равномерно
Увеличивался от r д о
при повороте на угол, соответствующий полному
ходу исполнительного механизма. При этом зависимость q = / (<р„. ) будет
" • е т ь расчетный характер q = / (<p ) (рис. 5.1 la, кривая 1).
miW
р0
им
r t
ы
pQ
Наибольший радиус кулачка: г „,„ =
+ Дг„ где r - м и н и м а л ь н ы й
РЗДнус кулачка, принимаемый из конструктивных соображений; Дг
"Рнравдение радиуса кулачка при полном ходе исполнительного механизма,
к
r t
к
равное для ш и б е р а (рис. 5.10а) полному ходу р е г у л и р у ю щ е г о органа I w ; для
клапана (рис. 5 . 1 0 6 ) - Л - Ь / а , для поворотной заслонки (рис. 5.10в)
№
Профилирование
кулачка
для
получения
заданной
рабочей
характеристики (рис. 5.11а, кривая 2) о с у щ е с т в л я ю т с л е д у ю щ и м о б р а з о м :
1 . В ы ч е р ч и в а ю т график рабочей характеристики q = / (<р ), полученной
п о расчету, и г р а ф и к заданной характеристики q = / (<р .„).
2.Делят у г о л поворота на равное ч и с л о частей, восстанавливают
п е р п е н д и к у л я р ы д о пересечения с з а д а н н о й рабочей характеристикой в
т о ч к а х а & а , и з которых п р о в о д я т г о р и з о н т а л ь н ы е л и н и и д о расчетной
кривой 1, н а х о д я т т о ч к и а ' а' , а ' , . . и с о о т в е т с т в у ю щ и е и м у г л ы ф ' ь <р' , <р'з,.
З.Отдельно строят п р я м о л и н е й н у ю з а в и с и м о с т ь радиуса кулачка от
угла п о в о р о т а исполнительного м е х а н и з м а (рис. 5.11,Б) и п о углам cp'i, <р'з,
ф'з,... о п р е д е л я ю т г ' г ' , г ' . . . нового кулачка.
ро
н
ь
ъ
3
ь
ь
2
г
3
2
i t
4 . П о л н ы й х о д (угол поворота) исполнительного м е х а н и з м а д е л я т на т о
ж е ч и с л о р а в н ы х частей и последовательно о т к л а д ы в а ю т радиусы г^о, г ), г'а,
U max, С о е д и н я я к о н ц ы радиусов плавной линией, п о л у ч а ю т п р о ф и л ь
кулачка, о б е с п е ч и в а ю щ е г о заданную р а б о ч у ю характеристику. Радиус Гко
о п р е д е л я ю т п о конструктивным с о о б р а ж е н и я м в зависимости от д и а м е т р а
выходного вала исполнительного механизма.
г
Выбор исполнительного
механизма
И с п о л н и т е л ь н ы е м е х а н и з м ы в ы б и р а ю т в зависимости от в е л и ч и н ы
у с и л и я , н е о б х о д и м о г о для перестановки р е г у л и р у ю щ е г о к л а п а н а или
в е л и ч и н ы м о м е н т а д л я поворотных заслонок.
Д л я п о в о р о т н ы х заслонок величину м о м е н т а ( Н м ) , необходимого д л я
их в р а щ е н и я , о п р е д е л я ю т п о формуле: М = К ( М + М ) .
М о м е н т на валу исполнительного м е х а н и з м а д о л ж е н быть равен или
больше момента, необходимого для вращения заслонки.
Р е а к т и в н ы й момент, обусловленный с т р е м л е н и е м потока закрыть
заслонку, Н м ,
р
M =U07-A
p
P M
т
-D; ,
где Дрро - перепад давления на заслонке, Па; рекомендуется при расчете
п р и н и м а т ь Дрро, равным избыточному д а в л е н и ю перед заслонкой р , D д и а м е т р заслонки, м.
М о м е н т трения в о п о р а х , Н м ,
M =0.785-Dj-p r . X ,
где г - радиус ш е й к и вала заслонки, м; X = 0,15 - к о э ф ф и ц и е н т т р е н и я в
опорах;
К = 2 * 3 - коэффициент, у ч и т ы в а ю щ и й затяжку сальников и
и 1
t
-l
1
ш
загрязненность трубопровода.
y
5.4. П р и м е р расчета р е г у л и р у ю щ е г о органа
Л и с т исходных д а н н ы х д л я расчета регулирующего органа
1. Наименование рабочей среды: вода
2. Часовой объемный расход рабочей среды:
Q = 20,2 м*/час.
3. Температура регулируемой среды:
t = 160 °С.
4. И з б ы т о ч н о е давление регулируемой среды в начале участка:
Р . „ - 1 4 , 7 10*Па.
5. Плотность регулируемой среды при нормальных условиях (t = 20 " С ,
Р = 1 0 1 , 3 2 5 П а ) : р = 998,303 кг/м .
^ Д и н а м и ч е с к а я вязкость регулируемой среды при нормальных
Условиях: щ, = 1003 мкПа- с.
3
№
н
Расчет регулирующего органа
Т а б л и ц а 5.16. Результаты сводного расчета
Наименование
п/п величины
1
2
1
Расчетный наибольший расход при
нормальных условиях
2
3
4
5
6
7
8
Обозначение
расчетная формула
3
Q W « =0,1-1,2) Q
Абсолютное давление в начале Р = Р * н « 0 , 1 М П а
участка
Абсолютная температура среды
Т = t -ь 273
Диаметр трубопровода
Расчетный
наибольший
расход
среды
Плотность среды
Рн.
Вязкость среды
v
Скорость в трубопроводе
4-м;,,
+
МПа
14,8
К
мм
кг/с
433
65
6,73
кг/м'
915,835
м7с
1,982-1 (Г
м/с
2,215
—
725752
—
0,0259
Па
13437
—
0,2
Па
449,33
ДР 1=Рн. • q- Н,
Па
0
ДР, = Д Р
Па
13890
МПа
14,7861
кг/с
6,73
и
H
* К
9
10
или Единицы
Численное
измерения значение
4
5
24,24
м*/час
Р.
Число Рейнольдса
Коэффициент трения трубы
регулирующего органа
до
2-lg(l9,5-D )
Tp
11
12
13
14
15
16
17
18
19
Потери давления на трение д о
регулирующего органа
Сумма коэффициентов местных
сопротивлений д о регулирующего
органа
Потери в местных сопротивлениях
д о регулирующего органа
Потери давления от изменения
уровня
трубопровода
до
регулирующего органа
Потери
давления
до
регулирующего органа
Абсолютное
давление
перед
регулирующим органом
Максимальный расход среды после
регулирующего органа
Абсолютное
давление
после
регулирующего органа
Плотность среды при Р
IS,
0
М
Р = Р,-(0,3-0,4)х
2
х(Р„ МПа
'
= р
'-рТ
14,7561
913,98
Р,
2
Динамическая вязкость среды
• ДР 1 ДРщ
Р1-Р..-ДР,
р
20
Т)
кг/м'
Пас
18,7-10*
7
П р о д о л ж е н и е таблицы 5.16
4
3
1 f
Кмя см этическая вязкость среды после
21
2
регулирующего органа
22~ Скорость
рабочей
среды
регулирующего органа
23
24
25
5
м /с
2,007-10"
м/с
2,219
—
704478
—
0,0259
Па
2695
7
после
Число Рейнольдса
u,'D„
Коэффициент
трения
трубопровода
после регулирующего органа
Потери давления на трение после
регулирующего органа
26 Сумма
коэффициентов
местных
сопротивлений после регулирующего
0
органа
27 Потерн
давления
в
местных
сопротивлениях после регулирующего
Па
0
Па
0
Па
2695
МПа
0,0166
Па
2825
кг/с
6,73
органа
28 Потери
29
давления из-за изменения Д Р - ^ Р з • g- Н
уровня
трубопровода
после
регулирующего органа
Потери давления после регулирующего
г
органа
30 Суммарные
рабочем
потери
давления
на ДР = Др1 + ДР
участке без регулирующего
с
г
органа
31
32
Перепад давления
в дроссельном
регулирующем
органе
прн
максимальном расходе
Максимальный расход рабочей среды в
условиях
перед
регулирующим
4-р.
органом
33 Плотность среды перед регулирующим
органон
34
35
37
Р.
Р | = Р н
Эффективное
проходное
сечение
регулирующего
органа, a F
соответствующее
расчетному
максимальному расходу.
Максимальное
открытие Ьр.6
регулирующего
органа,
соответствующее
максимальному
расходу
-
Максимальная площадь
отверстия клапана
77
:•"
5095^ДР,-
кг/м
м
1
3
914,975
8,2 НО"
7
Р |
мм
49
проходного
aF/F„,
м
2
1,094-10'"
Построение рабочей х а р а к т е р и с т и к и
1. Задаемся несколькими значениями расхода Oj в пределах о т Qo д о
Q'm« (или о т М д о M'max): Q0=0 кг/с; Q l = 0 , 5 кг/с; Q 2 = l кг/с; Q 3 = l , 5 кг/с;
Q4=2Kr/c; Q5=2,5 кг/с; Q6=3 кг/с; Q7=3,5 кг/с; Q8=4 кг/с; Q9=4,5 кг/с;
Q10=5 кг/с; Q11=5,5 кг/с; Q12=6 кг/с; Q13=6,5 кг/с; Qmax=6,73 кг/с.
2. О п р е д е л я е м п о т е р и давления н а дроссельном р е г у л и р у ю щ е м органе:
APpi=C • и ^ - р
/2
3. Н а х о д и м д а в л е н и е перед регулирующим органом:
0
2
P
ш ч
Pli ~ Рк»ч - ДРт11 - APMU •
4. Рассчитываем плотность среды перед р е г у л и р у ю щ и м о р г а н о м :
Pi
=
Ркач * Pl/Риач •
5. Определяем э ф ф е к т и в н о е проходное сечение, соответствующее Oj:
6. Р а с с ч и т ы в а е м э ф ф е к т и в н о е относительное
дроссельного р е г у л и р у ю щ е г о органа при Oj: aFjF^
.
проходное
сечение
7. По графику д л я определения эффективного проходного
определяем относительное о т к р ы т и е клапана по о т в е р с т и ю : л = FJF^
сечения
.
8. Рассчитываем относительный расход р е г у л и р у ю щ е й с р е д ы :
<7 = й / 0 ™ 9. Определяем к о э ф ф и ц и е н т передачи регулирующего органа:
Ё = Mil6л .
ы
10. С т р о и м р а б о ч у ю характеристику д р о с с е л ь н о г о регулирующего
органа. Результаты в ы ч и с л е н и й сводим в таблицу
и строим рабочую
характеристику р е г у л и р у ю щ е г о органа (см. рис.5.12).
Я
0,8
0,6
0,4
0,2
0
О
0,2
0,4
0,6
0,8
п
Рис.5.12. Рабочая характеристика р е г у л и р у ю щ е г о органа.
Список литературы
1. Проектирование систем автоматизации технологических процессов /
JjLC-Клюев и д р . - М.; Энергоатомиздат, 1990.- 464 с.
2. Кузнецов В.А. Судовые ядерные энергетические установки. - Л.:
Суяостроение,1989.- 256 с.
3. Н е л е п и н
Р.А.
Автоматическое
управление
СЭУ.Л.:
СуЖ>строение,1986.- 296 с.
4. П е ч е н е н к о В.И. Автоматика регулирования и управления С С У . - М.:
•fyHlcnopT, 1973. - 304 с.
З.Сизых
В.А.Судовая
автоматика
и
аппаратура
контроля.*&:Транспорт,1986.-280с
б.Юрмаев Б.Н. Автоматизация систем отопления, вентиляции и
Ю в д и ц и о н и р о в а н и я воздуха. - Л . : Стройиздат, 1976.- 216 с.
7.3брожек В.В. Автоматика судовых систем. - Л . : Судпромгиз, 1962. 147 с.
8.Львов Н . С . Автоматизация контроля и регулирования сварочных
Процессов. - М.: Машиностроение, 1970. - 128 с.
9 . 0 с н о в ы теории автоматического регулирования. / / В . И. Крутов и д р . М л М а ш и н о с т р о е н и е , 1984. -386с.
10.Воронов А.А. Основы т е о р и и автоматического регулирования. -М.:
Вывшая школа, 1977. -519с.
^:
11 .Арзуманов
Э.С. Расчет
и
выбор
регулирующих
органов
а^ЙШатических систем. -М.: Энергия, 1971. -112с.
:;5
12.Келим Ю . М . Электромеханические и магнитные элементы систем
фДОматики. - М . : В ы с ш а я школа, 1991. -304с.
•у}'В.Кузнецов
Н.М. Регулирование мощности реактора
атомной
« в е т р о с т а н ц и и . -Л.: СЗПИ, 1981. - 7 2 с .
14.3верков В.В. Ядерная паропроизводящая установка с ВВЭР-440. - М . :
Эвергоатомиздат, 1987.-200с.
15.Черновец А.К. Системы управления защиты и контроля ядерных
ректоров А Э С . -Л.: Л П И , 1974. -169с.
16, И в а щ е н к о
Н.Н.
Автоматическое
регулирование.
-М.:
Машиностроение,1973. -606с.
17. Х а й к и н А . Б . Элементы судовой автоматики. -Л.: Судостроение, 1982.
•376с.
% 18.Автоматизация производства и промышленная электроника. //Под
ред. А. И. Берга. -Том 2. -М.: Энциклопедия,1963.
19.Электроприводы регулирующих органов энергетических реакторов.
Л \ П . Ю р к е в и ч и д р . -М.: Энергоатомиздат,1985. -240с.
20. Г о л о в и н
Ю.К.
Судовые
электрические
приводы.
-М.:
Транспорт, 1991. -327с.
21. П а с с А.Е. Судовая электроника. -Л.: Судостроение,1975. -327с.
22. К л ю е в А.С. Автоматическое регулирование. -М.: Энергия,1967. 344с.
23. С п р а в о ч н и к по корабельной автоматике. / Ю.К.Баленко и д р . - М . :
Воениздат,1974. - 3 2 5 с .
24.Ш и ф р н н М . Ш . П р о е к т и р о в а н и е автоматических систем управления
судовыми п а р о т у р б и н н ы м и установками. -Л.: С у д о с т р о е н и е , 1974. -592с.
25. С ы р о м я т н и ков
В.Ф.
Основы
автоматики
и
комплексная
автоматизация с у д о в ы х пароэнергетических установок. - М : Т р а н с п о р т , ! 9 8 3 .
-312с.
26. П е ч е н е н к о В . И . О с н о в ы автоматики и комплексная автоматизация
судовых п а р о э н е р г е т и ч е с к и х установок. -М.: Т р а н с п о р т , 1979. -264с.
27. Е ф и м о в
М.В.
Автоматизация
технологических
процессов
полиграфии. - М . : Книга, 1989. -512с.
28. Беляев И . Г . Автоматизация с у д о в ы х п а р о п р о и з в о д я щ и х установок. М.: Т р а н с п о р т , 1991. - 3 6 8 с .
29. К у т ы ш Л . И . Автоматизация с у д о в ы х д и з е л ь н ы х и газотурбинных
установок. -Л.: С у д о с т р о е н и е , 1973. -382с.
30. К о р о л е в В . В . С и с т е м ы
управления
и
защиты
АЭС.
М:
Энергоатомиздат. 1986.- 186 с.
31. Сергеев В.Л. А н а л о г о в о е м о д е л и р о в а н и е судовых Я П П У . Л . :
Судостроение. 1971 - 234 с.
32.С т е ф а н и Е.П. С б о р н и к
задач
по
основам
автоматического
регулирования т е п л о э н е р г е т и ч е с к и х процессов. М : Энергия. 1973.- 336 с.
33. С е р о в Е.П.
Д и н а м и к а парогенераторов. М : Энергия. 1972. -326 с.
34. Н и к о л а е в В . И . К о н т р о л ь работы С Э У . Л . : Судостроение. 1966. -428 с.
35. П о д л е с н ы й Н . И .
Э л е м е н т ы систем автоматического управления и
контроля. К и е в : В ы с ш а я школа. 1975.- 271 с.
36. Р у к о в о д с т в о
по
проектированию
систем
автоматического
управления. Бесекерский В . А . н д р . М : В ы с ш а я школа. 1983.- 328 с.
37. П о д л и п е н с к и й B.C. Э л е к т р о м а г н и т н ы е
и
электромашинные
устройства а в т о м а т и к и . К и е в : В ы с ш а я школа. 1987,- 438 с.
38. Е м е л ь я н о в А . И .
Практические
расчеты
в автоматике. М . :
М а ш и н о с т р о е н и е . 1967.-316 с.
3 9 Л е м б е р г М . Д . С и с т е м ы гидроавтоматики. М . : Энергия. 1965. - 290 с.
40. Егоров К . В . О с н о в ы теории автоматического регулирования. М . :
Энергия. 1971.
4 1 .Н а л а д к а
средств
автоматизации
и
автоматических
систем
регулирования. / А . С . К л ю е в и д р . - М.:Энергоатомиздат,1989.- 368 с.
42. П р о е к т и р о в а н и е систем контроля и автоматического регулирования
металлургических п р о ц е с с о в / Глинков Г . М . и др.-М.:Металлургия 1986.-352с.
>
Содержание
Введеяяе
Глава 1-Объекты автоматизации
1.1-Судовая пароэнергетическая установка
_
1.2. Особенности автоматизации котельных установок
13. Автоматизация судовых турбоагрегатов
„
] ААвтоматизация конденсатно-питательных систем
1.5. Судовая дизельная установка
„
„.
1.6. Автоматизация общесудовых систем
Глава 2. Проектирование систем автоматизации.,..
„
2.1.Этапы проектирования
„
2.2. Структура систем управления
.......
2.3. Функциональные схемы автоматизации
2.4. Алгоритмическая структура системы автоматизации и ее синтез
Глава 3. Статика систем автоматизации.—
_
„..
3.1 Общее представление о статических характеристиках звеньев
и систем
—
•
3.2. Статические характеристики задающих устройств
3.3. Статические характеристики регулирующих органов
3.4. Статические характеристики усилителей
3.5. Исполнительные механизмы
3.6. Статические характеристики объектов регулирования
„
3.7. Статические характеристики чувствительных элементов и
обратных связей
—
.—.Глава 4. Динамика систем автоматизации
«
_
4.1 Динамические характеристики объектов управления
„
42. Динамические свойства звеньев систем управления и регулирования
Глава 5. Расчет элементов систем контроля» автоматизации
5.1 Расчет сужающих устройств
••
—
52 Пример расчета сужающего устройства
» —
5-З.Расчет дроссельных регулирующих органов и выбор исполнительных
механизмов...—
—
- —
• 5.4. Пример расчета регулирующего органа
••
Спасок литературы,
•*
3
4
4
6
9
11
12
16
22
II
23
25
27
29
29
30
35
39
47
52
62
65
65
84
96
96
112
116
131
135
Стенин Валерий Александрович
Элементы систем автоматизации
СЭУ
Учебное пособие
К о м п ь ю т е р н ы й набор и верстка
З ы к о в а А.С.,Петровский С.А.
П о д г о т о в к а к печати О.А. М а р т и р о с я н
С д а н о в производство 10.12.2006. П о д п и с а н о в печать 20.01.2007
Уч.-изд. л . 3,29. Ф о р м а т 84x108 / . Усл.-печ. л . 8,7.
И з д . № 1199. З а к а з № 1176.
1
16
Редакционно-издательский о т д е л Севмашвтуза
164500, г. Северодвинск, ул. Воронина, 6.