prod-3374-tekstzashchityx - Исследования в Гимназии №1505
реклама

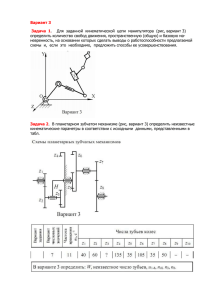
Текст защиты. 1 Слайд. Здравствуйте, меня зовут Котова Даша. На протяжении этого учебного года я занималась исследованием под названием «Робототехника, манипуляторы и их будущее». Цель моего исследования – улучшить знания о манипуляторах и робототехнике как науке. Слайд 2. Задачи и цель Цель - Разобраться в строении манипуляторов и изучить перспективы робототехники. 1. Найти определение манипуляционных роботов как класса робототехники. 2. Изучить строение манипуляторов и их частей. 3. Выделить ключевые характеристики манипуляторов. 4. Изучить перспективы робототехники Слайд 3. Роботы делятся на две основные категории: мобильные и манипуляционные. Мобильный робот - автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Манипуляционный робот – автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Очень часто инженеры создают многофункциональные машины, относящиеся к смешанной категории: они могут и передвигаться, и выполнять какие-либо действия. Но меня заинтересовали именно манипуляционные роботы. Для начала я разобралась в их строении. Слайд 4. Манипулятор состоит из звеньев – несгибаемых частей, соединенных между собой шарнирами. Кинематические пары образуют кинематические цепи, которые бывают замкнутыми и разомкнутыми. Замкнутой цепью называют ту, все звенья которой входят в состав как минимум двух кинематических пар. Подобную систему мы видим на рисунке справа. Слева – кинематическая цепь, в которой есть звенья, входящие лишь в одну пару. Она называется разомкнутой. Слайд 5. Шарниры - части, соединяющие между собой звенья манипулятора, обеспечивая им возможность различное движение. На данных иллюстрациях мы видим три их разновидности. Шаровой шарнир позволяет движение вокруг общей точки; цилиндрический шарнир позволяет движение звеньев вокруг общей оси; шарнир равных угловых скоростей – позволяет вращение с изменением наклона звеньев. Цилиндрические – двери; ШРУС – руль автомобиля; шаровой – протез. Слайд 6. Движение роботу обеспечивают специальные приводы, расположенные на поверхности или, иногда, внутри него. Базовый состав привода – двигатель и устройство управления данным приводом. Различают пневматические, гидравлические и электрические приводы. Они различаются мощностью и стоимостью, а также надежностью и управляемостью. Гидравлические и пневматические приводы представляют собой поршни, приводимые в движение жидкостью или газом соответственно. Электропривод состоит из преобразователя электрической энергии в механическую, т.е. включает в себя мотор. Это делает его менее компактным по сравнению с остальными. Слайд 7. Рабочий орган – это исполнительная система манипулятора, предназначенная для выполнения различных действий. Она может представлять собой сверло, схват, фрезу, что угодно, в зависимости от целевого назначения робота. Траектория движения рабочего органа, когда угол между всеми звеньями равен 180◦, ограничивает его рабочую зону. На рисунке это заштрихованная область. За ее пределами манипулятор не сможет исполнять свои функции. На этом же рисунке мы можем увидеть антропоморфную кинематику манипулятора. Это означает, что его строение напоминает строение человеческой конечности, в данном случае – руки. Слайд 8. Для чего бы ни был предназначен манипулятор, его пригодность для совершения какойлибо функции определяет ряд характеристик, зависящих от его строения. Параметры каждого из них варьируются в зависимости от того, какое предназначение имеет робот, потому что в каждой сфере использования важна отдельная характеристика. Степень свободы манипулятора представляет собой возможность манипулятора изменять положение. Любая кинематическая цепь обладает некоторым числом степеней подвижности. Эта характеристика определяет число свободы схвата манипулятора, т.е. сложность устройства рабочего органа. На этой иллюстрации можно разобрать число степеней подвижности и свобод манипулятора. 1 и 3 звено имеют 2 степени подвижности, т.к. могут двигаться как вертикально, так и вокруг своей оси. Последнего лишено второе звено – оно движется только вертикально, по прямой. В сумме получается 5 степеней подвижности. У схвата манипулятора только 2 степени свободы: его схват двигается лишь в двух направлениях, открываясь и закрываясь. Также можно сказать, что у этого манипулятора антропоморфная кинематика: он напоминает строение руки, имея всего на одно звено больше. Для роботов разного назначения грузоподъемность разная, и может варьироваться от грамма до нескольких тонн. Манипуляторы с большой грузоподъемностью отличаются высокой мощностью двигателей и маленьким количеством прочных звеньев. Каждое последующее звено, начиная с рабочего органа, приходится нагрузка предыдущего и вес привода. Если звеньев слишком много, а груз слишком тяжелый, то конструкция может не выдержать. Слайд 9. Групповая робототехника – это направление, в котором разрабатываются роботы некрупного размера, взаимодействующие друг с другом и окружающей средой, а достижению цели способствует самоорганизация роботов. Они работают в команде, что и отличает их от других. В медицине активно применяются роботы-хирурги, а также проектируются роботысиделки для больных, нуждающихся в постоянном наблюдении. Активно ведутся разработки роботизированных протезов конечностей для людей и даже животных. Помощниками не только для больных, но и для вполне здоровых, но занятых людей могут стать роботы с искусственным интеллектом. Наличие искусственного интеллекта означает, что робот способен обучаться, т.е. самостоятельно, по мере своего развития, изменять собственный программный код. Вкупе с манипуляторами искусственный интеллект сможет заполнить производство, вытеснив не только рабочих, но и операторов. Некоторые научные эксперименты могут выполняться обученными роботами, которые смогут не только провести эксперимент, но и сделать выводы по проделанным действиям или выяснить причину неудачи. Космическая программа также приобретет новые возможности. Расширятся пределы досягаемой части Солнечной системы, а возможно и не только ее. Роботы-космонавты смогут путешествовать по Галактике, исследовать планеты и звезды, при этом не нуждаясь в запасах пищи и кислорода. Слайд 9. Заключение. Манипуляторы – это пространственные механизмы из кинематических цепей и звеньев, образующих кинематические пары с угловым или поступательным относительным движением и системой приводов, раздельных для каждой степени подвижности. Манипуляционные роботы характеризуются грузоподъемностью, обширностью рабочей зоны и количеством степеней свободы и подвижности. Робототехника очень перспективна как наука, так как роботы используются практически во всех сферах жизни человека. Слайд 10. Спасибо за внимание!