ФОРМАЛИЗАЦИЯ ЗОНЫ ДЕЙСТВИЯ ГИДРАВЛИЧЕСКИХ
реклама

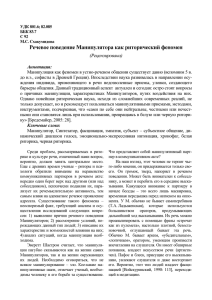
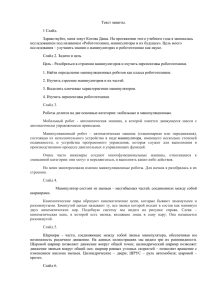
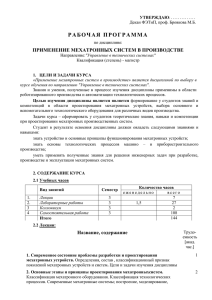
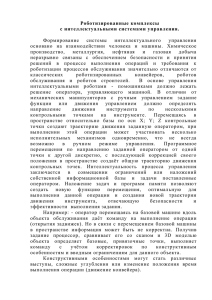
ФОРМАЛИЗАЦИЯ ЗОНЫ ДЕЙСТВИЯ ГИДРАВЛИЧЕСКИХ МАНИПУЛЯТОРОВ НА ЛЕСОПРОМЫШЛЕННЫХ СКЛАДАХ Бакай Б.Я. (НЛТУ Украины, г. Львов, Украина) The stated basic aspects of formalization of an operative range of hydraulic manipulators with grapple for small log sort yard of timber industry. Введение. Одним из основных параметров работы погрузочных устройств манипуляторного типа, предназначенных для выполнения сортировочных и погрузочно-разгрузочных операций на лесопромышленных складах, является их зона действия. Зона действия манипулятора – пространство, в котором совершаются действия по перемещению круглых лесоматериалов. Контур зоны действия и ее объем полностью определяются кинематическими параметрами гидравлического манипулятора, такими как главная кинематическая цепь, (число подвижных элементов и способов их сопряжения), а также величиной и соотношением длины ее элементов, установочных углов между ними и углов их относительного поворота, [1, 2]. Для формализации переместительных движений элементов манипулятора целесообразно рассмотреть их движение в пространстве с учетом зоны действия в вертикальной и горизонтальной плоскостях, а также с учетом наличия всех ограничений в виде складского производственного оборудования и штабелей круглых лесоматериалов. Постановка задачи. Траектория движения грейферного захвата манипулятора определяет движение перемещения груза, от которой в свою очередь зависят производственные возможности подъемного механизма, а также типы обслуживаемых ею штабелей и транспортных единиц. Необходимо принять во внимание, что траектория движения перемещаемых лесоматериалов определяет продолжительность цикла операции и затраты энергии. Таким образом, исследование и формализация рабочей зоны гидравлического манипулятора должна включать следующие этапы: 1.Анализ принципиальных технологических схем использования манипуляторов на лесопромышленных складах грузооборотом 20-70 тыс.м3 в год. 2.Изучение ограничений на выполнение перемещения лесоматериалов и отдельных элементов манипулятора. 3.Анализ и синтез кинематических схем манипуляторов с заданными производственными возможностями. 4.Оценка соответствия кинематики манипуляторов производственным условиям и назначению. Решение вопроса формализации зоны действия манипулятора создаст возможность моделирования работы манипулятора в условиях приближенных к реальному лесопромышленному складу. Сущность решения задачи. Многообразие предлагаемых технологических вариантов с использованием манипуляторов обусловлено различными природнопроизводственными условиями предприятий, конструкцией манипулятора, спосо- бом и местом отбора круглых лесоматериалов. Известны, исследованы и реализованы следующие производственные решения, предусматривающие: а) использование передвижных манипуляторов, (рис. 1, а, б); б) использование стационарных манипуляторов, (рис. 1, в, г, д). Рисунок 1 - Технологические схемы применения манипулятора: 1 – продольный лесотранспортер; 2 – лесонакопители; 3– буферные площадки; 4 –эстакады; 5 – манипулятор Проведенный анализ представленных решений использования манипуляторов на сортировке, штабелировании и отгрузке круглых лесоматериалов показал, что наиболее эффективной является схема, предусматривающая поштучно-групповой отбор лесоматериалов, как вариант наиболее полно удовлетворяющий существующую производственную технологию на лесопромышленных складах, рис.1, а, б, [4]. На рис. 2 представлены основные кинематические схемы манипуляторов для выполнения операций в принятых производственных условиях. На основании проведенного детального анализа производственных возможностей и конструктивных особенностей наиболее простой кинематической схемой манипулятора является манипулятор, созданный с использованием вращательных пар (рис. 2, а) для обеспечения полноценного пространственного перемещения лесоматериалов. Рисунок 2 - Кинематические схемы манипуляторов В общем случае связь между координатами xp , yp , z p точки грейферного захвата манипулятора и управляемыми обобщенными координатами q0 , q1 , q2 определяется системой уравнения xp xp (q0 , q1 , q2 ) (1) yp yp (q0 , q1 , q2 ) z p z p (q0 , q1 , q2 ) Уравнения связи между координатами рабочей точки и обобщенными координатами исполнительных устройств для принятой кинематической схемы манипулятора примут вид (2) zp L1 sin q1 L1 (sin q1 cos q2 cos q1 sin q2 ) , y'p L0 L1 cos q1 L2 (cosq1 cos q2 sin q1 sin q2 ) , (3) xp y'p cosq0 , yp y'p sin q0 , (4) 1 q0 arctg( yp xp ) (5) arcos(L12 L22 z p2 y 'p ) 2 ' 1 p q1 arctg( z p y ) (2L1 z p2 y 'p ) 2 , (6) L12 L22 z p2 y 'p 2 , (7) q2 arcos 2 L L 1 2 Одним из основных моментов, заслуживающих особое внимание при рассмотрении процесса движения грейферного захвата и составных элементов гидравлического манипулятора в условиях производственного пространства лесопромышленного склада, есть влияние ограничений на формирование зоны обслуживания. В следствии проведенного анализа и синтеза ограничений определены их основные группы: – ограничения, которые созданы препятствиями в виде производственных объектов и штабелей древесины; – ограничения, связанные с соотношением длины стрелы и рукояти манипулятора, а так же с типом структурной схемы манипулятора; – ограничения, которые накладываются подвижностью в кинематических парах манипулятора. Последние два ограничения могут быть решены еще на стадии проектирования механизма гидравлического манипулятора, так как на передпроектном этапе известны технологические задачи, которые должен выполнять манипулятор. Первое ограничение является более существенным, так как не подлежит решению на этапе выбора структурной схемы и технических характеристик манипулятора. С целью решения этого вопроса возникает необходимость произвести формализацию существующих препятствий различными элементарными геометрическими образами. К ним относятся: штабеля круглых лесоматериалов, торцевыравниматель, лесонакопители, сортировочный транспортер – параллелепипеды произвольных размеров и ориентации; сложные объекты и технологическое обо- рудование неправильных форм, (например эстакада с хлыстами), которые представляются в виде многоугольников с выпуклыми сторонами. Необходимо отметить, что формализация ограничений не решает вопрос свободного перемещения грейферного захвата между двумя точками, которые расположены на значительном расстоянии друг от друга по кратчайшей траектории движения. В сложных условиях лесопромышленного склада, с большим количеством текущих задач по выполнению транспортно-переместительных операций, предлагается решение вопроса путем подъема первого звена манипулятора с последующей его установкой на портал с возможностью выполнения передвижения параллельно расположенному сортировочному транспортеру [4]. Выводы. Обзор технологических решений, предусматривающих применение манипуляторов на лесопромышленных складах, выявил их широкое разнообразие. Практика применения манипуляторов на лесопромышленных складах показывает, что эффективность их работы зависит от зоны обслуживания. Для обеспечения эффективной работы манипуляторов: предложено использовать манипуляторы с вращающимися парами; установлено связь между координатами подвески грейфера и обобщенными координатами манипулятора; изучены и формализованы существующие ограничения в зоне деятельности манипулятора. Практическое использование поставленной задачи возможно выполнить на основании разработанной конструкции машины для выполнения переместительных операций на лесопромышленном складе оборудованы гидравлическим манипулятором. Литература 1. Алябьев В.И., Рахманин Г.А., Сальникова З.С. Исследование зоны действия погрузочноштабелевочных манипуляторов// Труды ЦНИИМЭ. –Химки: ЦНИИМЭ. –1970. –Вып. 108. – С.66–78. 2. Корендясев, А. И. и др. Манипуляционные системы роботов/ А.И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; Под ред. А. И. Корендясева. –М.: Машиностроение,1989.– 471 с. 3. Бакай Б.Я. Обґрунтування технологiчних вимог до сортувально-штабелювального механiзму на базi манiпулятора, обладнаного грейферним захоплювачем// Науковий вiсник. – Львiв: УкрДЛТУ. –2003. –Випуск 13.2. – С. 90–93. 4. Бакай Б.Я. Технология и оборудование для нижних складов с малым грузооборотом// Лесной коплекс: состояние и перспективы развития. – Брянск: БГИТА. – 2003, вып. 6. – С. 3–7.