Ш.Я. ВАХИТОВ, Я.Ш. ВАХИТОВ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ
ПРЕОВРАЗОВАТЕЛИ
И
ДИНАМИЧЕСКИЕ - МИКРОФОВid
УЧЕБНОЕ ПОСОБИЕ
САНКТ-ПЕТЕРБУРГ
2004
/
ВОЗВРАТИТЕ КНИГУ НЕ ПОЗЖЕ
обозначенного здесь срока
~ - ~~ (~ )
C5f 11 (
(?:,)
МИНИСТЕРСТВО КУЛЬТУРЫ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОБАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САНКТ -ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КИНО И ТFЛЕВИДЕНИЯ»
Кафедра 81\-устики
Ш.Я. ВАХИТОВ, Я.Ш. ВАХИТОВ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
И ДИНАМИЧЕСКИЕ МИКРОФОНЫ
УЧЕБНОЕ ПОСОБИЕ
САНКТ-ПЕТЕРБУРГ
2004
ГfГиБЛ'ИоТЁКА '
УНИВЕРСИТЕТА J
КИНО И ТЕЛЕВИДЕНИЯ .i
1VЧЕ&НЫЙ ФОН"' .
__,_..,--
УДК
621.39
Вахитов
ШЯ.,
Вахиrов
Я.Ш.
ЭлеiсrрОмеханические
динамические микрофоны: Учебное пособие.
-
nреобразователи
СПб. : изд. СПбГУКиТ,
и
2004. -
132 с.
ISBN 5-94760-065-Х
Учебное пособие посвящено вопросам теории., расчета и конструирования
динамических микрофонов, главным образом
-
однонаправлеiJНЪIХ, которые
скупо освещены в литературе по Электроакустической аппаратуре .
С помощью комплексной математической модели, построенной на
основе функционально-системного представления микрофона, автор впервые
с единых nозиций рассматривает вопросы анализа и синтеза микрофонных
структур, согласования параметров их функциональных подсистем, усЛовий
формирования
заданных
частотно-пространственных
пара."dетров,
причины
характеристик,
отклонеНИй
реальных
достижимости
характеристИI<
от
разработкой
и
идеальных и мн . др.
Книга
предназначена
инженераМ,
занимающимся
эксruiуатацией микрофонов, а также 6-rудентам , изучающим эти вопросы.
РЕЦЕНЗЕIП
-
начальник
отдела электроакустики
ОАО
<<ИРПА
им.
А. С.Попов<ш, к.т.н. , ст.н.с. Р.В . Домбровский .
Рекомендовано к изданию Советом факультета АВТ.
Протокол -М! 3 от28.10.200. г.
ISBN 5-94760-065 -Х
© Ш.Я.
© ШбГУКиТ, 2004
2004
Вахитов, Я.Ш. Вахиrов,
3
ОТ АВТОРОВ
Настоящее учебное пособие по дисциплине «Электроакустическая
аппаратура (Акустика, ч.l)» предназначено для студентов, обучающихся по
специальности «АудиовизуаJrьн<iЯ т~хника>> . Оно ориентировано, в основном,
на студентов заочной формы обучения, однако может быть полезно та~же
студентам-очникам и вечерникам.
Учебное
дисциплины
пособие
включает
два
«Электромеханические
-
динамические».
Остальным
первых
раздела
преобразователи»
разделам
и
упомянутой
«Микрофоны
предполагается
посвятить
первом
подробно
последующие врrпуски.
Учитывая
адресность
пособия,
в
рассмотрены лишь два типа преобразователей
-
разделе
электродинамические и
электростатические, как наиболее часто применяемые в электроакустической
аппаратуре для звукотехнических целей.
·
Во втором разделе при изложении теории динамических микрофонов
применен
функционально-системный
принцип
анализа
их
работы,
позволяющий четко разделять задачи отдельных подсистем микрофонов и
описать
компенсационный
механизм
формирования
их
частотно­
пространствеиных характеристик. Теоретические основы этого подхода были .
р<iзработаны в работах [1-З] .Методически это позволило авторампоказать в
образной
форме
(весьма
важной
для
изучающих
предмет
заочно)
методологию разработки структуры микрофонной системы, выделения её
основных
элементов
и
приближенной
оценки
достижимых
при
этом
параметро в.
Значительное
влиянии
на
расстояний
Для
помещены
внимание
уделено
авторами
частотно-пространствеиную
от
их акустических
выполнения
задачи
с
входов
контрольных работ
таблицами
важному
характеристику
вопросу
о
микрофонов
до источника звука .
в
конце
количественных
каждого
данных,
раздела
позволяющих
студенту самостоятельно выбрать свой вариант по номеру зачетной книжки.
Там
же
даётся
перечень
контрольных
вопросов,
ответить
на
которые
требуется по данной контрольной работе .
Настоящее учебное пособие представляет собой переработаиное и
дополненное издание книги
[2].
4
ЭЛЕКТРОМЕХАIШЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
1.
1.1.
Классификация и общие сведения
Обязательным элементом (у3Лом) электроакустического апnарата
(ЭАА)
устройство,
является
колебательной
энергии
механическую
и
из
иреобразование
осуществляющее
одного вида
обратно .
в
другой:
Такое
электрической
устройство
-
в
называется
элек.тромехапическим преобразователем или, кратко, Э:М:П .
Всякий преобразователь
механическую ,
и,
имеет две стороны
соответственно,
два
электрическую
-
направления
преобразования :
элещической в механическую и механической в электричес
~~
называют
двигателем
~
(pиc.l.l,a),
второй
и
.
Первый
преобразователем-
~ ~--·----
уенераторо.м (рис . 1.1 ,б) .
.л;э:м:п могут быть каноническими (истинными) или регуляторами. В
канонических
преобразователях
подводимая
энергия
иреобразуется
непосредственно · в выходную, которая, по этой причине, не может быть
больше подводимой . В nреобразователях- регуляторах подводимая: энергия
используется
для управления
энергией,
получаемой
от
источника
на
выходной стороне ЭМП. При этом выходная: энергия может существенно
превышать входную .
Ещё
одним
классификациоННЪiм
признаком
Э:М:П
является
их
свойство, называемоеddбрати.мостъю: если один и тот же Э:М:П можно
использовать как в ~е двигателя, так и генератора, то его называют
обратимым (см. рис.
1.1).
В противном случае преобразователъ будет
необратимым.
Канонические
Э:М:П,
как
правило,
обратимы,
регуляторы
необратимы .
Электромеханические преобразования осуществляются с nомощью
либо магнитного, либо электрического полей. Поэтому тип используемого
5
в
ЭМП
поля
также
является
классификационным
фактором,
в
соот~етствии с которым различают:
V
а) преобразователи
с
магиитны.м
электродинамические,
полем:
магнитные
и
к
ним
относЯт
магнитострикционные
nреобразователи;
Ь) преобразователи
с
электрическим
электростатические
конденсаторные
и
полем:
преобразователи,
электретные,
к
ним
относятся
подращеляемые
и
на
электростри~<-ционньzе,
называемые обычно пьезоэлектрическими.
Каждая сторона преобразователя характеризуется двумя величинами:
электрическая
-
напряжением
nодаваемого
механическая - колебательной силой
Следовательно, ЭМП
которого
в
режиме
можно
двигателя
F
и
и
током
i;
и скоростью ~ (см . рис. 1.1).
рассматривать
входными
сигнала
как
четырехполюсник,
величинами
являются
и
и
у
i,
выходными F и ~, а в режиме генератора- наоборот.
Это позволяет для оценки частотНой характеристики ЭМП и его
эффективносm
пользоваться
электрических
четырехnолюсников .
Четырехполюснике
(рис .
коэффициентом передачи К
некоторыми
1.2)
Как
представлениями
известно,
передача
в
из
теории
электрическом
сигнала
оценивается
:
(1 .1)
где
u1
и
и2
-
соответственно
напряжение
сигнала
на
входе
и
выходе
четырехполюсвика, К- модуль комплексного коэффициента передачи, <р -
сдвиг фазы между и 1 и и2.
Коэффициt::нт К - величина безразмерная, так как и 1 и и 2 выражаются
в одних и тех же единицах . Численное значение этого коэффициента
зависит от структуры четырехnолюсника . Наnример , в Четырехполюснике
в виде nассивного фильтра с согласованным сопроmвлением нагрузки
Z.
·
б
(см. рис . 1.2, а) в полосе пропускания
tрансформаторе
с
коэффициентом
единицы, коэффициент передачи
K:::fl , а за ее пределами K~J. В
трансформадив
отношением
по
смыслу
выходной
электромеханические
меныпим
K>l (n превышает еДЮiИЦУ, то есть
сигнал усиливается по напряжению (см . рис.
Похожим
п = ш1/ш2
1.2,6)).
коэффициентом
величины
к
М,
входной,
преобразователи.
Однако
выражаемыtо~
характеризуются
здесь
эrот
и
показатель,
называемый коэффициентом электромеханической связи или КЭМСом,
имеет размертюстъ, так как в ЭМ:П входные и выходные величины имеют
раз8):10 физическую природу. Например, в преобразователях
выходным
сигналом
служит
сила
получающаяся
F0,
-
двигателях
на
выходе
преобразователя при заторможенной механической сИстеме, а входным -
~потребляемый ЭМП на электрической стороне (см. рис. l.l,a).
Следовательно,
. (1 .2)
--
Размерностьэтой величины {М} = Н/А .
В преобразователях- rенерат рах-'см. -риС: 1.1,6) КЭМС выражается
~
-
---.
отношением напряжения и 0 на разомкнутой электрической стороне (то есть
- J
4- на механической (входной) стороне :
ЭДС - е) ....______
к скорости колебаний
(1.3)
Размерность
этого
отношения
fMl
В!~.
Поскольку
с
преобразователь обратим, то
(1.4)
то есть соотношения
(1.2)
и
(1 .3)
приводят к одной и той же величине
М.
По этой причине в дальнейшем (при выводе выражений для КЭМС
конкретнъ1х преобразователей) мы будем использовать лишь один из
режимов - .либо двигательный, либо генераторный, а именно тот, который
7
tJ} РЕ~О-!М Д&ИГАТЕ.АЯ;
НОРМА Г. Ы4Ьi И ,
31170РМОЖШНЫ I-i •
-~i
r•
;;о ·-z - -
~и
~
• .1;;
М=т
Fv:;:.
'i . 1 .[);.:;ри,qнты
РА Бсты
3tv1П
7
''t)
{
•
ПPED6PAЗDBATEttEЙ
.л
_
·
_&
к
-11f
.
п-.5_
-lif
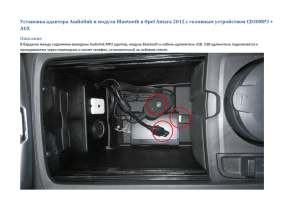
Рис .1.2 ..3JJЕКТРИЧЕСКИЕ ЧЕТЫРЕХПО!!юсники: I- с ноР~
'МflllbHDЙ НАГР~3КОЙ, ll -С PAЗOMKH·!:IThlt-o~\ ВЫХОДОМ
8
позволяет получить требуемый результат наиболее коротким и наглядным
способом .
В заключенж. раздела отметим,
\ttO взаимосвязь выходных величин с
входными в большинстве ЭМП носит нелинейпый характер . Однако эту
зависимость
удается
обычно
линеаризировать,
то
есть
сделать
nр1.1ближенно линейной путем введения определенных ограничений на
величины
входных
колебаний.
При
нарушении
этих
ограничений
возникают искажения колебаний, называемые нелинейнымu .
1.2.
Электродинамические преобразователи (ЭДП)
1.2.1.Устройство и коэффициент электромеханической связи
Электродинамический
принцип
иреобразования
базируется
на
законах электромагнитной индукции , а именно, на законе Био и Савара в
режИме двигателя и законе Фарадея в режиме генератора. Согласно
первому на провоДВИI< длиною
lи
с током
i, расположенным в равномерном
магнитном поле с индукцией В, действует сила
F=B ·l·i.
Если проводник закреrmен (заторможен), зто соотношение можно
записать в виде
F0 = B ·Z·i,
так что в соответствии с
(1.2) имеем
.
F.
М= :0 =BI.
Та:ки..\1
опреДеляется
образом,
КЭМС
произведением
злектродинамичес:кого
индукции
магнитного
(1.5)
преобразоRателя
поля
на
длину
проводника и является величиной постоянной ,не зависяшей от частоты .
9
По
закон у
Фарадея
в
проводнике
разомкнугам
'
длиной
l,
движущемся со скоростью ~ в равномерном магнитном поле с индукцией
В, индуктируется ЭДС
1
е = Вl ·q,
Оrкуда,в соответствии с (1 .3), можем написать
~
/
M==-= u0 = Вl ,q ,;
что совпадает с
~~
~'(.,.V\.-
.6)
(1 .5).
Оrметим, что для получения силы
.еол ътах индукцию В и длину провода
F l
в ньютонах, а ЭДС е
в формулах
(1 .5)
и
в
-
(1.6)
(и
исходных соотношениях) следует подставлять соответственно в теслах и
метрах .
Чаще всего электродинамические
катушечном
(рис .
1.3 ,а)
и
преобразователи реализуются в
ленточно.w
(рис .
1 . 3 ,б)
вариантах.
Реже
встречаются преобразователи изодинамического или ортодинамического
типов
[1] .
· Каrушечный
nровода,
преобразовmль состоит из катушки !(несколько слоев
· намотанного
на
кольцевой зазор магнитной
магнит
кериа
2
3 кернового
цилиндрический
систе.~1ы
(МС) ,
карКас),
помещенной
включающей
в
постоянный
типа с полюсными наконечниками в виде стакана
4
и
из мягкой стали, направляющими магнитный поток в зазор МС
(показан на рис . 1 . 3 ,а ирерывистой линией) . В результате в зазоре МС
создается
сильное
и
равномерное
маГнитное
поле
радиального
(по
отношению к оси катушки) направления. С помощью упрутого подвеса б (в
виде гофрированного воротника) катушка располагается в середине з~ора,
не касаясь ни стакана
4,
ни керна
2,
что обеспечивает ей возможность
неискаженных колебаний в осевом направлении .
Ленточный ЭДП реализуется в виде тонкой гофрированной ленточки
7
(из фольги или металлизированной пленки), помещенной в зазоре МС,
состоящей из постоянного магнита
1О
подковообразного типа и nолюсньrх
10
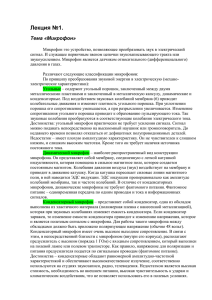
Рис J.3. ]/IЕ::КТРодинАмичЕСКИЕ ПРЕОБРАзоБАТЕ11И :
а- i"J1ВШЕЧНЬIЙ
d-
ЛЕНТОЧНЫЙ
~-~-~~----tJ
,
CJ...,
~м
Рис.1:1. [х:ЕМА входной ЦЕПИ 3ДП и ЧХ ЕЁ импЕдRнся .
11
наконечников
(см. рис.l.З,б). Концы ленточки зажаты контактами
9
позволяющими
в
режиме
генератора
снимать
ЭДС,
ленточке nри её движении, а в режиме двигателя
-
8,
индуцируемую
в
подавать .на нее ток
звуковой частоты .
1.2.2.
При
Входное электрическое сопротивление ЭДП-двигателя
использовании
ЭМП
в
телефонах)
МИ"-'JЮФонах,
(громкоговорителях,
электроакустических
аппаратах
важнейшими
их
характеристиками, влияющими на общие свойства апnаратов, являются
частотные зависимости полного входного сопротивления: электрического
в
режиме
двигателя,
механического
-
в
режиме
генератора.
-
Ниже
приведены формулы для полного входного электрического сопротивления
i "'
ЭДП в режиме двигателя _
Если
механическая
колебательная
заторможеиа
(то
есть
катушка
сопротивление
z.
будет
зависеть
катушки
-
активного соnротивления
система
неподвижна),
лишь
от
ЭДП-двигателя
его
электрическое
собственных
параметров
R" и индуктивности Lк, так что
(1 .7)
Это
сопротивление
можно
считать
собственным
импедансом
катушки .
Если
ЭДП используется
механической нагрузкой
i.
в
нормальном
двигательном
режиме
с
(см. рис. l.З ,а), катушка будет колебатьсЯ со
скоростью
.
р
Rli
; = -:- ·--:- = -.- .
Z c+ Z н
Здесь
F=
В · l- i
-
сила,
возникающая
(] .8)
Z
на
механической
преобразователя в результате взаимодействия тока катушки
стороне
i с магнитным
·
12
nолем (с индукцией В)в зазоре магнитной цепи;
~<
-
собственное
м~хщr~~еское соnротивление п:одвижной системы (ПС), ~ = ~ с+ ~ . - полный
импеданс механической стороны.
При
колебаниях
катушки
в
ней
будет
индуктироваться
ЭДС
двuJ/сения
е,," =В/ · .;,
которую, с ~етом
(1.8), можем записать
F
е,.,
в виде
B 2 Z2
(1 .9)
=BZ · - = - - ·i .
z
z
Следовательно, для входной стороны ЭДП имеем уравнение
.
и=Z.·i+e..
.
. В 2 11
=i·(Z .+ · . · ),
z
из которого следует, что
(1.1.0)
.Здесь и и i - напряжения входного сигнала и ток ·катушки;
z.. -· электрические
полное, катушки и
сопротивления
входной
стороны,
i.,, i .
и
соответственно
внесенное.
Таким образом, в результате колебаний катушки на входной стороне
ЭДП-двигателя
появляется,
кроме
z.,
так
называемое
внесенное
сопротивление
' М
z· .. = -ВЧ
---··· = -
z
2
(l.ll)
'
z
пропорциональное квадрату КЭМС (м = В/) и обратно пропорциональн~
поJmому
механическому
z
сопротивлению
выходпой
стороны
преобразователя. Имnеданс z в простейшем случае состоит из трех
компонент: активного, инерционного и упругого соnротивлений, то есть
.
.
1 .
.
] )
z = r + ;wm + ··: · ·· = r + J((fЛ!- - .
JOX:
(J)(.'
13
Здесь т, с и
r -
соответственно, объединенные значения массы,
rибкости и активного сопротивления собственной механической системы
ЭДП и механической нагрузки.
Подставив развернуrое значеJШе ~ в (1 .1О) и используя соотношение
(1.7),
получим
B2Z2
z .. =R. + j{j)f.• +-- . -
(1.12)
-
1
r+ ]OJm +-.)aJC
Рассмотрим полученное
областях,
выбираемых
для
z"'
выражение в разных частотных
отношению
no
к
частоте
Wм
механического
резонанса
OJ
1
~
(1.13)
= -·-
~'
В области , находящейся значительно ниже резонансной частоты
( (i)(< т.,),
считаем
[1]
1
-1>> {OJ/7! '
ах:
r
так
Z~ ··· -
jax: '
'ffO
Как
видим,
свидетельствует
внесенное
о
его
сопротивлеiШе
индуктивном
пропорциона.JlЬно
характере,
что
дает
jw.
Эrо
основание
трактовать пр·оизведение c.Jf/2 как внесенную индуктивность:
2
L .,. =c · B 212 = c ·M.
Точно так же в области
.
w»m,., можем считать
В2 /2
1
jOJm
joX:.,,
(1.14)
z"' jOJm .
z.,. ",·--= - - .
Внесенное сопротивление в этой области обратно пропорционально
jw, то
есть имеет емкостной характер, так что величина
(1.15)
14
может считаться внесенной емкостью .
Наконец, при ю = щ.., то есть на резонансной частоте,
.
в 2 z1
мz
z .. = R.,. = -r- = - r
Приведенный
анализ
позволяет
(1.16)
.
составить
входной цепи ЭДП, приведенную на рис .
электрическую
1.4,а,
и
построить
схему
график
частотной зависи,wости модуля входного электрического сопротивления
Z~
(рис.
1.4,б) . Как видим, на частоте механического резонанса щ,.
наблюдается резонансвое увеличение
на
(1.16).
этой
частоте
резко
Z,..,
так как согласно (1.8), (1 .9) и
возрастает
скорость
колебаний
,; .
Соответственно, достигают наиболъпшх значений ЭДС движения едв и
определяемая ею величина внесенного сопротивления Zвн
=
~н (см . рис.
1.4,6).
При дальнейшем росте частоты, в области ю
.
> щ..,
можно считать
82[2
z... "'-.-. Подставив зто прибли)f,.--енное значение в (1 .10), имеем
jйJm
.
ВЧ
z. .. = R• + JФL
+ -----• jшm
2
Нетрудно видеть, что здесь возможен
(1 .17)
еще один резонанс: между
индуктивностью катушки Lк и внесенной емкостью С6 н
(/)
",
..
=
2
т/В21 на частоте
_ __ .
В/
(1.18)
~L. ·m
Поскольку этот резонанс nолучается в результате взаимодействия
электрической величнны Lк с механической- т, то ю...., называется частотой
::>Лектромеханического резонанса . На этой частоте, согласно
соnротивление
превышающее
принимает
свое
минимальное
( 1.17),
значение,
входное
несколько
R".
Дальнейший
подъем
z
ar
обусловлен
действием
индуктивности
катушки, так что в области Ю» Щ,.,
(1 .19)
15
Приведеиные
строгий анализ
[2]
соотношения
являются
приближенными .
Более
nоказывает, что qастота Фэм выражается более точн~rм
соотношением
ш ,N.
J ,
В11 1
,
L, · т
(1.20)
= . . t ш JI. + - ~
а входное сопротивление на эт~ частоте превышает
R"
на величину
щ{есенноrо активного соnротивления
где
(1.2 1)
v,.. = cv,..
1.2.3.
Сила
(1 .22)
Поm10е механическое сопротивление ЭДП-генератора
F,
вызывающая колебательное движение подвижной системы
ЭДП-генератора nри нормальной нагрузке (см. рис . 1 . 1,б), преодолевает
противодействия механического имnеданса ~ с собственной ПС и СШIЫ
Ft>.,
возникающей в результате прохождения по катушке тока i. Этот ток
вызывает ЭДС
е
=Bll;,
·
индуцируемую nри колебании ПС со скоростью ~ .
Следовательно, по npmщиny Даламбера JUIЯ механической (входной)
стороны можем написать уравнение
(1 .23)
При этом
16
F
Здесь
е
ви;
z.
z.
.
(1.24)
=Вl · "" = Вli = Вl ·.
.
z. = Z. +Z.
полное
электрическое
сопротивление
выходной стороне ЭДП, то есть сумма электрических сопротивлений
юпуnпrn и
:i.
на
z"
цепи, нагружающей выход ЭДП.
Подставив
(1 .24) в (1.23 ),
получим
..
. . . .
в zр
(I .25)
F = Zc ·.;+-.-- .; = {(z c+ z .. ),
z
где
1
RZZ 2
М
z.
z.
(I .26)
z~"=--=-
есть внесениое механическое сопротивление. Сопоставляя эти соотношения
с
(1.11 ),
отмечаем полную их идентичность . Из
(1 .26)
очевидно, что если
ЭДП работает в режиме холостого хода, то есть Zн
механическое
сопротивление
отсутствует.
элею:рическом соnротивлении ( :i ••
=R)
При
=
оо, внесенное
чисто
активном
вносимое сопротивление также
будет активным, то есть аналогично реальному трению
вz z 2
r..,=R
вызовет
системы
дополнительное
ЭДП.
Это
демnфированне
свойство
механнческой
ЭДП-rенератора
колебательной
используется
в
так
называемых активных виброподавляющих устройствах[З]. Наконец, если в
нагрузочном электрическом сопротивлении преобладает индуь.-тивная
или
емкостная
l !jof
комnоненты,
внесенное
соответственно упругим или инерцио11ным :
В2 Р
1
jшL
j{J)C.., '
z.,::::::--=--·
rде
сопротивление
jwL
будет
17
Таким образом, с помощью ЭДП-генераторов можно осуществить
управление механическими параметрами ПС с помощью электрических
средств, в частности, изменять резонансную частоту щ., коэффициент
потерь
17 и
1.3.
характеристическое сопротивление
r0 .
Магнитные и маrнитострикционные преобразователи
1.3.1.
Магнитные преобразователи (МП)
Пр»НЦИП
действия
магнитных
электро.магнитиых
или
преобразователей основывается на использованми явления притяжения
маrнитами предметов, изготовленных из так называемых ферромагнитпых
материалов
-
железа, никеля, кобальта и др . При этом сила магнитного
притяжения не имеет полярности, то есть как северный , так и южный
полЮса
мапшта
(каждый
полюс)
притягивают
(но
не
отталкивают)
ферромагнитные тела с силой
.r~
= Фi<' = в; .s .
Здесь
S-
(1.27)
fJo
fJoи
площадь сечения одного полюса магнита, Ф0 - магнитный
поток, проходящий через зазор шириной 8 (рис. 1.5,а), В 5 - его индукция .
Следовательно,
Ф15 =В5 · S.
!io = 47l' · 10- Г н/м - магнитная пос-тоянная вакуума.
7
Магнитный преобразователь в простейтей реализации
состоит из упругого подвешенного якоря
постоянного магнита
сечений
S
(или
2
притягиваемого полюсами
через полюсные наконечники
площадями
наконечники намотаны
1,
взаимодействия
катушки
6
(рис . 1.5 , б)
с
3
и
якорем) .
4
с площадями
На
с общим числом витков
полюсные
ro.
Через
18
катушки пропусi<ается переменвый ток . Н и К
-
начало и конец намотки .
РаР(;МО"Ч>И...'d принциn действия МП в режиме двигателя .
При nрохождении по катушкам переменнога тока
i
на постоянный
магнитный поток Ф 0 , создаваемый магнитом , накладывается переменвый
поток Ф = Ф.. · cosшt, так что Ф 5 - Ф 0 ·1· Фи, согласно соаrношению
F6
1 (Ф 2 +2Ф Ф +
=---;
0
0
(1.27),
Ф2 ) .
(1.28)
f.l oS
Как· видим , зависимость силы от потока принципиалъно нелии ейна .
Первый
ч..т1е~
FQ - Ф/IJ.ЦJ..')
притяжения якоря, второй
nотока Ф, третий
-
представляет
собой
силу
постоянного
переменную силу, линейно зависящую от
-
нелинейную силу, способствующую возникновению
нелиней:ных
искажений
сигнала
нормального
функционирования
в
МП
процессе
ero
преобразования .
линеаризируют ,
а.
Для
именно,
nрдбирают такое соотношение между Фо и · Ф, при котором влияние
третьего члена . (J<qторый от Ф0 не зависит) становится
пренебрежимо
маrшм , то есть его соотношение с вторым членом
ф2
ф
- - = ·-<< 1.
2ФФ 0
2Ф 0
Тогда для nеременной составляющей силы магнитного притяжения
имеем
(1.29)
Переменвый поток Ф (nри неподвижном якоре, то есть ~ ~ О) можно
выразить через намагничивающую сиду
Ro,
W = cui
и магнитное сопротивление
препятствующее nотоку Ф при прохождении им воздуш цых зазоров
общей шириной
28:
2б
R "" ·o
f.loS '
Ф =
W Ф · f.l0 S .
- =·- - 1.
R0
28
(1.30)
Подставив (1.30) в (1 .29), nолучим для перемеююй составляющей
силы
F
(nри заторможенном якоре) и КЭМС магнитного преобразователя
следующие соотношения:
19
.
l;= w·Ф'!..i
б.
р'
wФ
м = -;·1 ~~0 = т
'
(1.31)
Это же значение КЭМС, но со знаком минус, получается при работе
МП в режиме генератора. Оrрицательный знак при КЭМС объясняется тем,
<по ЭДС движения е, возникающего в катушках при колебаниях якоря,
создает
внутреннюю
силу,
синфазную
противодействующую ей,как в ЭДП (см.
с
внешней
внесенное
сопротивление
F,
а
не
1.2.3).
Полное механическое сопротивление ;
содержит
силой
с
подвижной системы МП
«отрицательной »
упругостью,
выражаемой коэффициентами s11 «магнитной упругости» или ер ~ l/sJJ « магнитной гибкости»
:
S
Данный
2Ф
1
= - · _о_
р
floS· o
феномен
объясняется
J.J0 S · б
l
(1.32)
с= -=---·
"
тем
2Ф~ ·
s"
обстоятельством ,
что
сила
магнитного притяжения якоря уменьшается при его удалении от магнита и
увеличивается- при приближении, то есть имеет место эффект обратный
закону Гука.
· Если сила nостоянного магнитного nритяжения превысит силу,
обусловленную уnругостью
подвесов
якоря,
произойдет «nрилипание»
якоря. к магниту, то есть nотеря его устойчивости . Поэтому надежная
работа МП возможна лишь при выполнении условий :
( 1.33)
Это условие определяет выбор величины потока Фо, создаваемого
постоянным магнитом, и зазора о.
Подробнее об этом можно прочитать в
[1]
(с.
242).
20
1.3.2.
Этот
Магнитострикционные преобразователи (МСП)
тиn
преобразователей
гидроакустической
аппаратуре
и
применяется
преимущественно
ультразвуковой
технике.
в
Поэтому
ограничимся здесь изложением самых общих сведений.
Сущность
заюпочается
в
создаваемого,
происходит
двигательного
том,
к
что
примеру,
изменение
под
действием
катушкой
размеров
эффекта
магнитострикционного
с
внешнего
числом
магнишого
витков
ферромагниmого
w
тела,.
и
то
поля,
током
е<.,"ТЬ
i,
его
деформаЦИЯ. Количественной мерой этого эффекта является зависимость
относителыюго удлинения
(AI)
стержня МСП от напряженности внешнего
(намагничивающего) поля . Удлинение, происходящее вдоль силовых линий
намагничивающего
поля,
не
зависит
от
его
направления,
так
что
маrнитострикционный эффект не имеет полярности . Поэтому переменiюе
поле с частотой Н&\tагничивающего тока/вызывает деформацию стержня с
частотой
2I
Когда это нежелателъно, прибегают к поляризации, то есть
помимо перемениого поля создают постоянное (с помощью постоЯ.IiНоrо
тока или магнита).
Когда стержень заторможен, т. е . созданы условия, препятствующие
его деформации, намагничивающий ток i создает силу
(1.34)
ЗдесЬ
u - магнитострикционная постоянная ферромагнетика, из ·
которого сделан стержень;
R"' -
магнитное сопроmвление магнитопревода
(вклЮчающего стержень); w- число витков катушки; i - ток ка1)'шки.
Из
(1.34) получается выражение дня КЭМС МСП:
м=f/
/
l~cO
U · (JJ
=--
R"
(1 .35)
21
Величина а зависит от материала стержня и напряженности Н0
поля
Так
поляризации.
магни~острикционного
наиболее
для
распространенного
материала (отожженного никеля) максимальное
значение
достигается при
Н 0 =100071200А / м .
Подробнее об этом см.
1.4.
[1]
(с.247).
Электростатические преобразователи
1.4.1. Преобразователи
с внешней поляризацией (конденсаторные)
'
(,
Преобразователи
этого
типа
EE~:l:!~~B_JIЯJ?T .
собQй
.JIЛQС~Ий
конденсатор (рис . \ . б,а), один ~з электродов которого выполнен в виде
----
.
перфорированного диска
.
2
из металла или металлизированной к~амик.!:!, а
-
--
~. ·'
второй - в виде тонкой _мембраны 1 из фольги или металлизиров~нной
полимерной
пленки
3
(рис.l.б~~ Рассмотрим
преобразователя в простейшем варианте
-
работу
такого
с металлическими Электродом и
мембраной :
В
статическом
состоянии
емкость
такого
преобразователя
Со
(рис.l.б,б) определяется соотношением
С =Со ·S
о
t5 '
где
с0=8 ,85·1 о- Ф/м
12
(1 .36)
диэлектрическая
приближенно , воздуха) в системе СИ;
8-
постоянная
вакуума
(и,
величина статического зазора с
учетом постоянного смещения мембраны под действием поляризующего
напряжения
U 0; S -
площадь электрода или эффективной части площади
22
&'
Рис.1.5, МАгнитный nrшБrA1DRATt!lb: i -яко~ь , 2.-мР.гн.иi ,
3 111 Ц - ПOilfП:::rыE НАКОНЕЧНИКИ, 5 -ПОДВЕСЬ/ . Б- f(гП~шк,q .
..:.
Рис.1.6. ]лEктrricrATIIIЧEt:KИE ПР'ЕDБРЮО8iПi!!1и: 1 и .3MБPfHtЬI •
2-
ЗЛЕК.Т?ОД .
ME -
23
мембраны (действительная площадь мембраны может быть больше
площади электрода).
В
динамическом
режиме
мгновенное
преобразователя-генератора отличается от
F
(1.36),
значение
С
емкости
т.к. под действием _ силы
мембрана приближается или удаляется от электрода на величину ~ее
мгновенного смещения, так что
(1.37)
Знаки в этом соотношении соответствуют смещению мембраны в
сторону электрода.
Предполагаем, что ~чное сопротивление R..!Gнастолько велико,
что за время Т одного периода колебания заряд не успевает измениться.
Иначе говоря, заряд
Q0 является величиной постоянной, т.е.
(1.38)
Здесь
где и
-
И= Ио-и,
переменная составляющая напряжения, возникающая в результате
изменения емкости преобразователя.
Перемножив выражения в скобках и сделав сокращения, получаем
и
и= оо·~.
(1.39)
Как видим, переменвое напряжение и, возникающее в результате
колебаний мембраны, прямо пропорционально ее смещению. Примем во
внимание следующие обстоятельства.
Во-первых, величина сопротивления Rн выбирается из условия
(1.40)
Здесь Тн
-
период самого низкочастотного колебания.
Поскольку С0 очень мало (порядка
20-40
пФ), сопротивление Rн
получается очень большим (порядка тысячи мгОм). По этой причине
24
можно полагать, что напряжение и практически не отличается от ЭДС е,
так что без существенной погрешности примем
®
u=e.
Во-вторых, чтобы получить формулу для КЭМС, надо в (1.39)
смещение выразить через скорость колебаний мембраны. Связь между
ними
[ 1]
выражается соотношением
Подставив значения и и ~в
(1.39),
.
и
е=-о _ ,~
j(J) · б
получим
и
. \
М= ·
'
=-o-
(1.41)
j(J)·8·
Как видим, в отличи~ от преобразователей с магнитным полем
КЭМС
электростатического
частотнозависимой
и
преобразователя
мншюй .
ареобразования происходит
Последнее
означает,
сдвиг по фазе
колебаний мембраны,; на угол
является
между
что
ЭДС
других
в
и
процессе
скоростью
cp=7d2.
Что касается полного механического сопротивления
для
величиной
преобразователей,
определяется
z,
то оно, как и
алгебраической
собственного ic и внесенного iвн механических сопротивлений
отличие
от
( 1.25),
внесенное
сопротивление
не
суммой
,
но, в
складывается с ic,
а
вычитается из него, т.е.
(1.42)
где
Zвн
.
и;
сопротивление
1
Zc~--
=------"---
j(t)· Со
конденсаторного
собственное
преобразователя,
электрическое
определя~мае
в
основном его емкостью С0 .
Подставив значения iвн и
Zc в ( 1.42), получим
· ·
1 U?·C
·
1
z =Zc - - · - 0- -0 = Z c - - -j(t)
82
j(J)·Csн
(1.43)
25
02
Здесь с.н
= uz.С
о
-
внесенная гибкость, имеющая отрицательный
о
знак и способствующая тем самым уменьшению общей упругости системы
s=
1
с
= - - - = sc -s."·
се
с."
Физически это объясняется тем, что при отклонении мембраны,
например,
в
сторону
электрода
сила ее электростатического
притяжения
увеличивается, а при удалении - уменьшается, так что электростатическая
сила
частично
компенсирует
упругую.
Из
(1.43)
чрезмерном увеличении поляризующего напряжения
очевидно,
U0
что
при
или уменьшении
зазора о внесенная гибкость может сравниться по величине или даже статЬ
меньше механической
:
(1.44)
В этом случае нарушится устойчивость мембраны, т.е. произойдет ее
npuлunaнue к электроду и преобразователь выйдет из строя .
Соотношения
точные
(1.4 3)
данные
по
и
( 1.44)
расчету
имеют приближенный характер. Более
условий
устойчивости
конденсаторного преобразователя можно найти в
В
заключени~
пригодны
также
раздела
и
отметим,
для
что
[l]
254-257).
приведеиные
преобразователей
L
(С1р.
с
мембраны
соотношения
мембраной
из
-·- ---------
металлизированного полимерного материала толщиной д со следующей
оговоркой. Если в таком преобразователе (рис.l.б, в) реальный воздушный
зазор (между нижней поверхностью мембраны и электродом) обозначить
о1 , то в формулах
(1.39)-(1.43)
следует использовать эквивалентный зазор
( 1.45)
где Е- диэлектрическая проницаемость полимерной основы мембраны [1].
26
1.4.2.
Преобразователи с внутренней поляризацией (элекгретные)
В
1896 году английский ученый
О.Хевисайд сделал предположение о
возможности существования поляризованного диэлектрика, обладающего
способностью удерживать
электрический
заряд.
В
двадцатых
годах
прошлого (20-го) века японским физиком М.Ягучи был найден такой
~ По
аналогии
с ааглийским
словом
magnet
(постоянный
магнит) этот диэлектрик, ~с.~ см~__!арнаубского_~оск~ и
к_~ифоли,\бьш назван
electret (электрет).
В настоящее время известен широкий класс _в~, пригодных для
изготовления
электретов:
различные
-
полимеры
поливмнилхлорид,
полиметиллитакринит и др.; неорганические диэлектрики- сера, нафталин,
ТИ'JilН~ты магния, цинка, кальция, бариЯ и др.; сложные диэлектрики,
получаемые из смеси разных вещест~
L\
iЭлектреты характеризуютс~nл.Q_1WiQClliЬIO а (К4 (м )
2
.
заряда на повер_хности
и временем сохранения ее, называемым ~р_еменем
жизнИ (разумеется, с определенным допуском на ее уменьшение).
-~
Величина
а
зависит
главным
образом
от
свойств
матер~ала,
определяющих его_способность_ "связывать"._ И.[IJL_"}'держиватЪ" заряд.
'
------ -Однако
на
величину
заряда
факторы
применяемый
интенсивность
поляризующего
технологические
максимальная
накопляемости
поляризующего напряжения
U0 ),
существенно
способ
поля
влияют
и
поляризации,
(илц
величина
длительность его воздействия и др.
Поэтому разброс достигаемых при изготовлении электретов значений
; поверхностной плотности очень велик - от 1о· 6 до единиц КА !.м 2 •
Время жизни электретов тоже бывает очень разным
-
от нескольких
дней до нескольких десятков лет. Для одного и того же электретного
материала это время также неоднозночно, так как в значительной степени
определяется эксплуатационными условия.ми (температурой и влажностью
.
- -
27
воздуха,
наличием
радиации
и
др.)
и
котором да~Н!>IЙ электрет ~сп~льзу~~с~.
констру_кцией
У~!Роgства,
в_
_
Несмотря на оrраниченность времени жизни электретов, они нашли
IIIИpoкoe применение в электроакустической аппаратуре (в основном в
микрофонах), так как избавляют от необходимости использования крайне
неудобной в эксплуатационных условиях электропитающей аппаратуры .
В
практике
конструирования
используются два типа электретов
электретных
преобразователей
биполярный и монополярный (или
-
просто мо_ноэлr:J<тре!!l ). В первом типе ~ противоположных сторонах слоя
электретного материала накапливаются~~~1rазного знака, во втором
они
имеют ~~ко!'!~IЙ
знак. \ В
настоящее
-----
время
применяются
преимущес т венно мqноэлектреты.
В
·
электростатических
преобразователях
электретный
элемент
реализуется либо в мембране, в виде ее пленочной основы с нанесенным
металлическим слоем (рис.
1.7,
а), либо в электроде, в виде нанесенного на
него (или наклеенного) слоя электретного материала (рис.
1.7,
б). На
рис.1 . 7 толщина слоя электретного материала обозначена си;мволом _ L\э, а
ширина воздушного зазора
Выведем
- 81•
количественные
соотношения
электретного
для
преобразователя на примере мембранного варианта его конструкции с
применением моноэлектрета (см . рис. 1.7, а) с плотностью заряда cr+. На
металлическом
слое
такой
противоположного знака
эл ектродом
через
(J'
мембраны
будет
индуцирован
заряд
. Металлический слой мембраны соединен с
:н
резистор
Rн,
не
препятствующий
постепеrшому
"перетеканию" постоянного заряда. Следовательно , на электроде также
будет индуцирован заряд
с
поверхностной
плотностью
(J' :,, ,
а в
воздушном зазоре образуется поле с искомой напряженностью Е 1 • Чтобы
его
найти ,
воспользуемся
одним
из
основных
соотношений
теории
электрического поля, согласно которому скачок нормальной составляющей
28
вектора электрической индукции поля при переходе через заряженную
поверхность равен плотности заряда этой поверхности . В нашем случае
эта индукция возникает в мембране на границе "электрет
и будет равна в0 вЕ, . Здесь Е,
-
металлизация"
напряженность поля на этой границе.
-
Следовательно,
()
Е=э
•
&·&о
Эта
напряженность
действует
на
всей
толщине
Аэ
и
создс.ет
поляризующее напряжение
(1.46)
Оrсюда
Подставив это соотношение в
(1.46),
получим
(1.47)
Эта формула позволяет вычислить так называемое жвивалентное
поляризующее напряжение электретноrо преобразователя . Пользуясь этой
величиной можно применять для расчета электретных преобразователей
все
соотношения,
полученные
ранее
для
электростатических
преобразователей с внешней поляризацией. Например, для коэффJЩиента
электромеханической связи имеем
_ -Ио
_ СУ
~э
------ ·-м. } йJ · б
(1.48)
j йJ · б 8 0 • 8
Напомним, что здесь о определяется формулой
существенных
преимуществ
КОНДеНСаТОрНЫМИ
значениях
U0
ЯВЛЯеТСЯ
ТО
в электретных
электретных
(1.45).
Одним из
преобразователей
обстоятеЛЬСТВО,
системах можно
ЧТО
ПрИ
перед
ОДИНаКОВЫХ
использовать ~еньшие
29
Рис.J.?. 3/lЕJ<ТРЕТНЫЕ ПPEDБP.A30бATEJJIA ( с монозлЕКТРЕТr~ ми)
3
ПьЕзозлЕ;­
мЕнт
С
3/lЕКТРОДАМИ
Рис.1.9. СхЕмА вьtход­
ной цши ЭСП-rЕНЕРАТОDА
30
значения зазора
t51 и, стало быть, реализовать большую чувствительность
не оnасаясь "прилипания" мембраны к электроду . Объясняется это тем, что
заряд электрета находится в связанной форме, вследствие чего не может
"стекаться" к центру мембраны, когда она, nод действием nоляризующего
напряжения, nроrибается в сторону электрода и ее центр оказывается
· наиболее
· 1.4.3;
близкой к электроду точкой.
Пьезоэлектрические преобразовате.ilн
ЭТот тиn преобразователей основан на ЯB.IIeHИIA электрострикции,
называемом
также
некоторых
пьезоэффектом,
материалов
выражающемся
изменять
свои
в
сnособности
линейные
размеры
(деформироваться) nод действием электрического поля или, наоборот,
создавать такое nоле при деформации внешней механической силой. Этот
эффект, в отличие. от магнитострикции (см.
1.3.2),
обладает полярностью,
Т.е. наnравление деформации (сжатие ИЛИ растяжение) МеНЯетСЯ nри
изменении направления электрического поля и наоборот.
Сnособностью к электрострикции обладают некоторые природные, а
также
искусственные
кристаллы
кварца,
кристаллические
турмалина,
материалы,
сегнетовой
соли,
например
сульфата
лития,
дифосфатов алюминия и калия и др.
Перечисленные материалы являются монокристаллическими. Однако
электрострикционный эффект может быть искусственно создан и в ряде
керамических
кристалликов,
материалов,
т .е .
состоящих
обладающих
из
большого
числа
поликристаллической
мелких
структурой.
Пьезеэффект можно создать также в некоторых nоЛимерных материалах. К
злектрострикционным материалам относятся титанат бария,
свинца и бария, пленки фтористого поливинилидона и мн.др .
ниобаты
31
Характерной особенностью пьезоэлектрических монокристаллов
является симметричность их внешней формы и анизотропия физических
свойств
-
электрических
и
механических .
В
соответствии
с
этим
анизотропными оказываются и электрострикционные свойства . Например,
под действием электрического поля определенной ориентации степень
деформации материала в разных направлениях будет неодинаковой. При
этом
существует
наnравление,
наибольшей величины.
пьезокристалла .
И,
вдоль
которого
деформация
достигнет
Это направление называют механической осью
обратно,
направление
наибольшего
значения
напряженности Е электрического поля, возникающего при деформации
кристалла, называют его электрической осью .
Направления
других
или
-
этих
осей в
одних материалах
могут
совпадать,
в
иметь ориентацию nод разными углами относительно друг друга
осей
кристалла.
Когда
направления
этих
осей
совпадают,
то
nьезеэффект называется продольным, если не совпадают- поперечным.
Количественно
пьезеэффект
характеризуется
пьезоэлектрическим
модулем d (м/В). Для обознач-ения типа пьезеэффекта (продольного или
поперечного)
модулю
придают
цифровые
индексы
-
d 33 , d 3 ,, d 32 ,
соответствующие направлениям осей в трехмерной координатной системе,
представленной
электрической
поверхности
сигнал,
на
осью
рис.
1.8.
элемента,
параллелепипеда) ,
оказываются
Направление
так
что
на
совмещается
3
электроды
которые
ориентированными
оси
(заштрихованные
подается
нормально
с
к
электрический
ней .
Оси
lи2
позволяют обозначить направление и величину поперечного пьезоэффекта.
Прямоугольные
пьезеэлементы
оптимальным образом, т.е. с осями
для
выбранного
вида
вырезаются
1,2,3,
деформации
d31
и
d32
монокристаллов
ориентированными так, чтобы
достигалея
электострикционный эффект. В таком случае
nьезомодуль ,
из
d33
максимальный
означает продольный
- поперечные пьеземодули в направлениях
1 или 2.
32
Как указывалось, монокристаллические пьезоэлементы обладают
полярностью преобразования и по этой причине не требуют поляризации.
В отличие от них поликристаллические материалы, как керамические, так
и полимерные, формируются под действием сильного электрического поля,
обеспечивающего
ориентацию
при
доменов
формировании
электрических
пьезоэлементов
полей
мелких
определенную
кристалликов.
Эта
ориентация сохраняется частично после снятия внешнего поля : Подобная
поляризация позволяет искусственно задавать направление электрической
оси
пьезоэффекта.
Поликристаллические
элементы
обладают
как
продольным, так и поперечным пьезоэффектом, однако модуль последнего
обычно в
2-3
раза меньше продольного.
Коэффициенты
электромеханической
для продольного и поперечного эффектов
dзз
[1]
связи
пьезопреобразователя
выражаются соотношениями
. Ею
(1.49)
. j(J)·Bo·&'
' Здесь
Ею
-
модуль
упругости
материала
элемента,
в
-
его
диэлектрическая проницаемость.
Более
подробные
почерnнуть в
сведения
по
этим
преобразователям
можно
[1].
1.5.Вопросы и задачи по ЭМП
1.5.1.
По общим вопросам
(~)Что
признакам
такое
электромеханический
классифицируются
преобразователь?
преобразователи?
необратимый преобразователь от обратимого?
Чем
По
каким
отличается
33
Что
2.
коэффициент
такое
передачи
электрического
четырехполюсинка и КЭМС электромеханического четырехполюсника?
Что между этими коэффициентами общего и в чем разница?
Отношением каких величин выражаются КЭМСы преобразователей­
3.
двигателей и преобразователей-генераторов? Докажите, что размерность
КЭМСов для этих преобразователей одинакова.
1.5.2.
По электродинамическим преобразователям
Вопросы
1.5.2.
-~то такое КЭМС и почему он так называется? Напишите формулу,
'--·
выражающую
его
связь
с
параметрами
ЭДП.
Разъясните,
какие
это
параметры (физический смысл), в каких единицах измерЯНirся.
2.
Как устроены
катушечный
и ленточный типы
ЭДП? Каков их
принцип действия в режиме двигателя и генератора? Как получаются силы ,
приводящие в движение катушку и ленточку в режиме двигателя? Ток и
ЭДС в режиме генератора?
~Что такое "внесенное сопротивление" в ЭДП-двиrателе и от каких
параметров
ЭДП
электрического
оно
зависит?
сопротивления?
То
же,
Изменится
в
ли
отношении
входное
входного
электрическое
сопротивление ЭДП, если затормозить его подвижную систему? Почему?
4.
Какова
частотная
зависимость
входного
электрического
сопротивления ЭДП? На каких частотах происходят механический и
электромеханический резонансы? Почему на частоте щ., сопротивление
сильно возрастает, а на
первый
резонанс
w,"' -
имеет наименьшую величину? Почему
называется
механическим,
а
второй-
электромеханическим?
jj из
каких
сопротивлений
состоит
полное
механическое
сопротивление ЭДП-генератора? Какое из этих сопротивлений зависит от
сопротивления нагрузки на выходе ЭДП? Почему и как?
J4
Задача
1.5.2.
ЭДП-двигатель
имеет следующие параметры:
масса ПС
т= ...... г,
коэффициент потерь rт=О,О87, частота механического резонансаfм= ... .... Гц,
активное
электрическое
сопротивление
катушки
Rк= 16
Ом ,
ее
индуктивность Lк=2,75 мГн, КЭМС В/=5 , 25 Тл·м, диаметр ее провода (по
меди) d=. о мм (неуказанные nараметры выбрать из табл.1.5 .2, б по
• • •
шифру) .
Определить:
-
активное механическое сопротивление
r
и коэффициент гибкости с
подвижной системы;
-
частоту электромеханического резонанса
длину
l
f ...,;
провода ЗК, индукцию В в зазоре магнитной цепи.
Рассчитать и построить:
- Ч:Х модуля входного электрического сопротивления IZвxl = Z"",
выражаемого в комплексной форме соотношением
(1.12).
Примечания .
··вычисления Zox производить длЯ ·частот стандартного ряда от 20 до 630
Гц, а такжеf,. иfЭ/оf. Результаты расчетов представить в таблице по форме
табл.1.5.2 и в виде графика.
35
Табл. 1.5 . 2,а
ЧХ модуля входного соnротивления
1
Частота[, Гц.
20
25
31,5
40
50
63
/м
100
80
125
160
fзм
200
и
Т.Д .
OJ·L.
R••
,У••
1
R..,=R.+R••
Хвх = о;Lк:tХ•н
znx =
.
R2
"' + Х.,2
1.5 .2 ,б Таблицы для выбора nараметров {.,,т и
Частота j.., Гц
Il\1
о
1
2
3
4
о
40,0
42,4
44,9
47,6
50,4
l
53,4
56,6
59,9
63,0
67,3
2
71,3
75,5
80,0
75,5
71,3
3
67,3
63,0
59,9
56,6
53,4
4
50,4
47,6
44,9
42,4
40,0
Рэл.меди=1,78·\О- 8 Ом ·М
Масса т ,
r
II\I
о
1
2
3
4
о
9,00
8,49
8,02
7,57
7,14
1
6,74
6,36
6,01
5,67
5,35
2
5,05
4,77
4,50
4,77
5,05
3
5,35
5,67
6,01
6,36
6,74
4
7,14
7,57
8,02
8,49
9,00
d
36
Диаметр провода d, мм
II\I
о
1
2
3
4
о
0,100
0,105
0,110
0,115
0,120
1
0,125
0,130
0,135
0,140
0,145
2
0,150
0,152
0,154
0,156
0,158
3
0,160
0,156
0,152
0,145
0,140
4
0,135
0,130
0,125
0,120
0,145
Примечания. Вариант выбирается на пересечении номера столбца
(по последней цифре номера зачетной книжки) и номера строки
II
предпоследней цифре). Если цифра больше
5.
1.5.3.
4, следует вычесть
из нее
1
(по
По электростатическим и пьезоэлектрическим преобразователям
(ЭСПи ПЭП)
Вопросы
1.5.3.
~: Что такое КЭМС, почему он так называется? Напишите формулу
_/
КЭМС
для
ЭСП и
ПЭП.
Разъясните
физический
смысл
параметров ,
входящих в эти формулы, а также единицы , в которых они измеряются .
2.
Что
такое
"внесенное
электростатическом
механическое
преобразователе?
Какова
сопротивление"
структура
в
полного
механического сопротивления ЭСП и в чем его оснnнное отличие от этого
сопротивления в ЭДП?
@как устроены электростатические преобразователи с внешней
поляризацией
с
металлической
и
полимерной
мембраной?
Какие
параметры добавляются в преобразователе с полимерной мембраной и в
чем разница в расчете КЭМСов этих преобразователей?
4.
Что такое "отрицательная гибкость" в ЭСП? Как ее вычислить?
Каково назначение поляризующего напряжения? Что мешает чрезмерному
увеличению
U0 или уменьшению зазора 8 с целью увеличения КЭМСа?
@то такое "электрет", из каких материалов его изготавлИвают,
какими параметрами характерИзуют? От чего, кроме свойств материала,
.зависят
эти
параметры?
Каковы
особенности
моноэлектрета?
Как
устроены электретные преобразователи?
б . Каким
соотношением
преобразователя
геометрических
с
его
выражается
связь
параметрами?
параметрах
КЭМСа
Почему
электретный
электретного
при
одинаковых
преобразователь
позволяет
получить большую чувствительность (КЭМС), чем конденсаторный?
7.
В
чем
особенность
состоит
электрострикционный
проявления
поликристаллических
этого
эффекта
пьезоматериалах?
или
в
пьезоэффект?
Какова
монокристаллических
Перечислите
эти
и
материалы
(названия и особенности).
8.
Что
такое
продольный
и
поперечный
пьезоэффекты; какими
параметрами они характеризуЮтся? Напишите формулу, связывающую
КЭМС
пьезопреобразователя
с
параметрами
материала,
разъясните
физический смысл каждого из параметров. Найдите общие особенности в
КЭМС электростатических и электрострикционных преобразователей.
Задача
1.5.3.
Мембрана ЭСП - генератора изгото.влена из ..... (для четных номеров
зачетной книжки
-
алюминий,
нечетных
-
сталь)
фольги
толщиной
.'l=8мкм с силой натяжения, обеспечивающей частоту первого резонанса
f 01=... .Гц
(выбрать из табл.1.5.3,б). Средняя ширина воздушного зазора
между мембраной и электродом 8=30мкм. Трение воздуха в этом зазоре
создает коэффициент потерь ТF0,707. Эффективная площадь мембраны
указана
в
табл.1.5.3,б.
Колебания
мембраны
вызываются
S
давлением
38
р=l,ОПа,
создающим
поверхность
силу
F=p ·S,
действующую
Нижняя
мембраны.
граничная
на
внешнюю
частота
работы
преобразователя.fн=31,5 Гц, верхняяfв=2f01 •
Вычислить .
-
Емкость преобразователя С0 ; эквивалентные значения массы т, и
гибкости с, мембраны (последняя - по частоте.f01 );
-
Поляризующее напряжение и0 (по условию устойчивости мембраны
с•• =2-с,), округлив его до единиц &ольт;
-
ЧХ напряжения и. на нагрузке ЭСП (рис.1 . 9) при двух значениях
нагрузочного сопротивления: R ·н, найденного из условия (1.40) по
частоте .fн=Зl ,5 Гц; R ··. =о, 1· R ·.;
-
Частотную зависимость неравномерн.ости ЧХ в дБ, определяемую по
формуле
llN=20·l
Результаты расчетов
И.(f).
-
g U н(/,".) , fэт- 1 ОООГц.
представить в
цифровой
(см.
табл.1.5.3,а)
и
графической форме.
· Примечания .
эквивалентными
Мембрану·
параметрами
рассматривать
т"
с,
как
и
простую
r,=7J·r0
МКС
с
(r0 =~т,/ с, -
хараКТеристическое сопротивление мембраны).
Колебательную скорость мембраны
;
определять через силу
F
и
модуль полного механического сопротивления ЭМП, вычисляемый через
его . коМIШексное значени е, выражаемое формулой
выражается формулой
(1.41),
(1.43).
Связь ЭJ(С с
напряжение и. находить по схеме рис . 1.9.
;
39
Табл.1.5.3,а
Частотные зависимости Ин и Шпри значениях R ·н= . .. Ом и R ...= ... Ом
NQ
Частота/, Гц
31,5
40
50
63
80
125
100
(стандарт. знач.)
1
(J) ·m ,
2
] /(J)·Сэ
3
Xc=(J)·m , - J / (J) ·Свн
4
Хвн = l/ (J)·Свн
5
z = ~r,
2
+(хс + х•.)2
6
Z c=l/(J)·Co, Ом
7
.; , м/с
е, В
8
9
Ин,
в
10
.t1N,
дБ
R 11 = ... 0м
R
.= ...
Ом
R .= ... Ом
R
.= ... Ом
1.5 .3, б .
Таблицы для выбора параметров
fin
Эффективная площадь мембраны S, мм
и
2
II\T
о
1
2
3
4
о
100
106
112
119
126
1
134
141
150
159
168
2
178
189
200
212
224
3
238
252
267
283
300
4
318
337
357
378
400
S
ит .д.
40
Частота первого резонанса мембраны}()}, Гц
Il\1
о
1
2
3
4
о
2500
2430
2360
2290
2230
1
2160
2100
2040
1980
1930
2
1870
1820
1770
1720
1670
3
1620
1575
1530
1485
1444
4
1403
1363
1324
1287
1250
Примечаiше. Задаваемые значения
номера столбца
строки
ll
вычесть
S и fo 1 . выбираются на пересечении
I (по последней цифре номера зачетной книжки) и номера
(по предпоследней цифре). Если ·цифра больше
5.
4,
из нее следует
41
2.
МИКРОФОНЫ ЭЛЕКТРОДИНАМИЧЕСКИЕ
2.1.
Общие
сведения.
Функционально-системная
структура
микрофона и его чувствительность
Микрофоном
осуществляющий
(МФ)
называетсЯ
преобразование
электроакустический
звуковых
колебаний
аппарат,
воздуха
в
электрические.
Иначе
говоря,
МФ
представляет
собой
устройство,
на
"вход"
которого действует звуковое давление р, создаваемое источником звука в
заданной
точке
его
звуко~ого
поля,
а
в
выходной
цепи
получается
электрический сигнал с напряжением и. При этом имеется - в виду, что
величинар
давление в свободном поле, т . е. при отсутствии микрофона в
-
выбранной точке поля излучателя.
Эффективность
напряжение
преобразования
электрического
сигнала
микрофоном
и
давления
оценивается
р
в
количественно
соотношением
и
Е
называемым._
чувствительностью
(2.1)
р '
МФ
и
имеющим
размерность
В/Па
( 8ольт на nаскаль) . Из размерности очевидно, что чувствительность МФ­
это напряжение, получающееся на его выходе при воздействии единичного
давления
(1 Па).
Величина Е оценивает эффективность работы МФ в целом, как
единого устройства . В действительности, , несмотря на малые размеры,
МИ!<_Е~он представ?Яет собой сложную систему, состоящую из цепоgки
функциональных
ступеней,
представленных
на
рис.
2.1
в
виде
__
ПОСЛе_Д.О]Ш_'[еЛ~НОСТИ ПрЯМОУГ_QЛ ЬНJ:!КОВ, внутри КО}Qр!:>lХ...ВПИСаRЫ НазВаНИЯ
ступеней,
отображающие
характер
происходящих
в
них
частных
42
3/lЕКТРИЧЕСК.«!Я
SL-~e..,:1====~>~и~
3
1jАК~Е1'1АЧЕСКАЯ
·1L--~t:A~K~=[=T=IAЧE::::::!CK::::At.Я~_J
г--·=)р,.,
-- _ _ _
АНТЕННА
Pиc.Z.i. Ф~нкционА/Iьно-сиr:тЕмнАя стРУКТ':!Рд микРСI-
1
i! . '
11JI
'lmн
Рис.2.2. РАссЕ"яниЕ зв~ковQй волны ПЕРЕАним ТОРцом
ЦИЛИНДРА
43
преобразований. Последние показаны в виде стрелок, в начале и конце
которых отмечены соответственно преобразуемая и получаемая величины .
~ ) Так в первой ступени, называемой акустической, учитывается
изменение давления, происходящее в данной точке поля в результате
размещения в ней твердотельного препятствия
-
микрофона: давление Рм
на поверхности диафрагмы микрофона будет отличmъся от давления р из-за
отражения (или, точнее, рассеяния) падающей на МФ волны поверхностью
его диафрагмы и корпуса. По этой причине давление Рм представляет собой
результат сложения двух давлений: р
-
свободного поля и Рот
-
поля
отраженной волны, так что
(2.2)
Поскольку на поверхности препятствия эти давления синфазны, то
их
прямое
суммирование
корректно
не
только
для
мгновенных,
но
и дл'
эффективных и амплитудных значений.
) . Вторая ступень, акустикомеханическая, отображает результаты
действия структурных элементов, осуществляющих формирование CWlЫ
пр~водящей
Название
в дВижение
ступени
поДвижную систему МФ,
соответствует
производимому
акустической величины р" в механическую
ею
F,
из давления р.,.
преобразованию
F.
Рассмотренные две ступени- акустическая и акустикамеханическая­
в
совокупности
называются
1акустической
антенной
м~а,
являющейся своего рода посредником между внешним звуковым полем и
его внутренней структурой или, иначе, приемной системой, определяющей
своими
параметрами
пространственную
и
частотную
зависимостn
силыF.
Каждая из последующих стуnеней цепочки (см. рис.
2.1)
определяет
У.астные преобразования и функциональные взаимосвязи, реализуютнеся
во внутренней структуре МФ:
44
~)- механическая - связь силы
F,
1
действующей на ПС микрофона, с
вызванной этим действием скоростью колебаний ~ nодвижной системы
(двух механических величин:
F
и ~ );
1- электромеханическая - связь скорости ~ (механической величины) с
индуцируемой
на
электрической
величины);
";J - электрическая
-
стороне
ЭДС
е
(электрической
связь напряжения электрического сигнала и с его
ЭДС е (двух электрических величин).
Эффективность каждого звена в отдельности (см. рис.
2.1 ),
как и
системы в целом, оценивается отношением выходной величины к входной.
Такие
отношения
являются
частными
характеристиками
стуnеней,
отражающими физические nроцессы, происходящие в каждом звене в
процессе общего преобразования в системе МФ.
В совокупности же,
выражаемой произведением всех частных характеристик, они описывают
свойства системы в целом.
Например, неодинаковость давлений р (входной величины) и р,.,
(выходной величины) явля:е>тся результатом взаимодействия звукового
nоля с корпусом микрофона, т.е. дифракции волны на корпусе МФ.
Поэтому отношение
р., =D
(2.3)
р
характеризуюшее первую ступень системы, называется коэффициентом
дифракции. Название же этой ступени связано с тем, что обе величины
(''входная" р и "выходная" Рм) являются акустическими{РИС.2.2).
В третьем звене (механическом) отношение
~
F
(2.4)
z
45
есть ни что иное, как обратная величина механического сопротивления
ПС и акустической структуры микрофона.
Преобразования,
электрическом
происходящие
в
электромеханическом
микрофонной
звеньях
системы,
и
выражаются
соответственно соотношениями
е= М
первое по определению
использованного в микрофоне ЭМП (см.
электрической величины е и механической
ступени.
является
Второе
простейшей
электрической
(2.5)
е
~
Как видим,
.
и
-=К
1.1)
4,
с
коэффициентом
генератором
сопротивлением. Название также понятно из
2-
и выражается отношением
чем и обусловлено название
обычным
цепи
Обратимся теперь к звену
представляет собой КЭМС
и
передачи
нагрузочным
(2.5).
акустикомеханическому, которое мы
соЗнательно пропустили, так как его характеристика не столь очевидна, как
у остальных звеньев.
Формально
отношение
F/p"'
имеет
размерность
площади
S.
Действительно, в некоторых тиnах микрофонов (ненаправленных) это
отношение
выражается
эффективной
площадью
диафрагмы.
Это
микрофоны, в которых воздействию звукового давления доступна лишь
одна сторона диафрагмы. Однако в наиболее широко распространенных
микрофонах направленного приема звука звуковое давление действует на
обе стороны диафрагмы или мембраны.
В этом случае связь силы
F
с давлением р,.. становится значительно
более сложной, неоднозначной и зависящей от конструкции и внутренней
АМ структуры микрофона. Поэтому, обозначив эту функцию (обытiно­
безразмерную) символом У( а.>), будем считать
F
.
-=S·У(ш)
Р:м
,
(2.6)
46
Как
указывалось
ранее,
произведение
часrnых
характеристик
звеньев должно привести к общей характеристике МФ. Действительно,
Рл,
F
~
е
и
и
р
р.,
F
~
е
р
-·-·-·-·-=-=Е
Подставив
соотношений
в
этот
(2.3)-(2.6),
ряд
значения
частных
(2 .7)
характеристик
из
получим
Е=
D·S · Y · M · K
.
z
(2.8)
Данное соотношение представляет собой универсальную формулу
чувствительности, пригодную для определения Е микрофонов любого
типа. Она позволяет осуществлять синтез _ структуры МФ для реализации
требуемой ЧХ подбором функций
2.2. Классификация
2.2.1.
z
и У при заданных функциях М и К .
микрофонов и показатели их качества
Классификация микрофонов
Основными классификационными признаками МФ являются
:
тИn nриемника или характеристика направленности;
тип преобразователя;
назначение МФ;
конструктивное исполнение, определяемое условиями эксплуатации ;
способ
связи
с
трактом
(про водные,
ращюмикрофоны ,
Инфракрасные).
Как видно из перечня, основными факторами классификации МФ
являются его ведущие подсистемы: акустическая и электромеханическая .
47
Тип
прuемника
выражаемые
определяет
характеристикой
направленные
направленности
свойства
МФ,
представляемой
R(O),
аналитически так назьmаемой ''улиткой Паскаля":
R(()) =A+B ·cos() .
Характеристикой
направленности
(2.9)
называется
функция
угла
(),
выражаемая отношением чувствительности микрофона при угле падения
звука () к его осевой чувствительности (т.е. при (}=0°) в свободном
звуковом nоле на частоте/или в полосе частот.
По этому признаку МФ делятся на npueJttнuкu:
давления;
"круговые",
синонимы:
"нулевого
порядка",
иенаправленные (А= 1; В = О);
-
градиента
разности
давления,
давлений ,
синонимы:
"восьмерочные" ,
" косинусоидальные" (А=О,
-
симметричные;
симметричные
"двунаправленные",
B =l);
несимметричные, градиента давления; синонимы: разности давлений ,
односторонненаправленные .
Последний
формам
(Л=J/3,
тип
приемника
наnравленности :
8 =2/3),
подразделяют
кардиоидные
гиперкардиоидные
полукардиоидные (А =З/4,
Следует иметь
в
также
(A=B=l/2),
(A =l /4,
по
конкретным
суперкардиоИдные
В =З/4), субкардиоидные или
B=l/4).
виду,
что
в
реальных
МФ
ХН
не
остаются
неизменными во всем частотном диапазоне, т.е. коэффициенты А и В
являются
частотнозависимыми.
Причины.
этого
будут
объяснены
в
дальнейшем .
По признаку направленности различают также микрофоны:
кимбинириванные (i:iкустически или электрически), т . е . сочетающие
разные типы перечисленных выше приемников;
остронаправленньzе, которые позволяют получить ХН более острую,
чем
это
допускает
"улитка
Паскаля".
В
зависимости
от
способа
48
обострения ХН они подразделяются на интерференционные ("бегущей
волны"), фокусирующие (рефлекторные и линзовые), градиента второго
порядка.
По
типу
электромеханического
преобразователя
(см.
гл.l)
МФ
подразделяют на:
-
угольные (в телефонных аппаратах);
-
динамические (катушечные и ленточные);
эл;ектростатические (конденсаторные и электретные);
-
пьезоэлектрические (биморфные и пленочные);
полупроводниковые;
магнитострикционные;
оптоволоконные и др .
По назначению МФ могут быть бытовыми, специального назначения
и профессиональными . Последние также подразделяются по более узким
признакам:
дlJ3. акустических измерений;
звукозаписи
музыки
академической,
эстрадной,
популярной
и
др .
видов
8 студийных или натурных условиях и т.п.;
1нукозаписи речи: художественной, монологовой, диалоговой и т.п.;
. систем
звукоусиления музыки и речи;
диспетчерской связи и т.д.
По конструктивному исполнению в соответствии с требованиями
· условий эксплуатации :
ручные (для солистов);
петличные (для крепления на одежде);
музыкальных инструментов {различных);
,·,,,
;,
..
граничного слоя
(PZM);
для трибун и столов заседаний (конференцтехники);
для видео-и кинокамер и т.д.
49
О назначении МФ и применимости их в тех или иных конкретных
условиях
эксплуатации
судят
по
совокупности
их
технических
характеристик или показателей качества.
2.2.2.Показатели качества как критерии выбора
При
выборе
микрофонов
для
тех
или
иных
условий
следует
учитывать всю совокупность технических требований к ним. Для этого
необходимо четко понимать, для чего нужны и что определяют те или иные
характеристики микрофонов.
а)
Показатели, определяющие точность передачи спектра звука.
Номинальный диапазон частот
-
диапазон, в котором определяют
параметры и характеристики микрофона. Задается/н- j..
Неравномерность
(ЧХЧ)
отношение
частотной характеристики
максимальной
к
чувствительности
минимальной
величине
чувствительности в номинальном диапазоне, обычно выражаемое в дБ,
Е
N=201g ~ .
(2.1 О)
Етiн
Эти
две
правильиости
характеристики
передачи
спектра
в
совокупности
полезного
служат
сигнала
от
критерием
источника,
находящегося на оси микрофона. Иначе . говоря, эта величина определяет
допустимые линейные (амплитудно-частотные) искажения микрофона.
Чтобы точнее передать необходимую или нормируемую тенденцию
ЧХЧ в разли•Iных частях номинального диапазона, вводят требования к
типовой чхч .
Типовой ЧХЧ называют присущую конкретному тиnу (марке) МФ
ЧХЧ,
вносимую
в
техническую
документацию
на
этапе
серийного
производства. ОтклонениА индивидуальных ЧХЧ от типовой обычно не
50
должны превышать
Ь)
±2 или ±3 дБ.
Показатели , определяющие эффективность преобразования .
Чувствительность Е
звуковому
давлению
на
-
отношение ЭДС на выходе микрофона к
заданной
частоте.
(Обычно
это
1000
Гц) .
Измеряется в [:а].
Чувствительность подавляющего болыпия:стна МФ принято измерять
в условиях '-свободного поля, то есть пространства, где воздействием на МФ
отраженной
от
пренебречь.
стен
и
других поверхностей звуковой энергии
Чувствительность
по
свободному
полю
можно
измеряется
и
нормируется по отношению к звуковому давлению в рабочей точке поля,
не искаженного присутствием микрофона, при указанном угле падения
звука (обычно при 8 = 0°).
Уровень
эквивалентного
звукового
давления,
обусловленный
собственным шумом М~ ~ это отношение. напряжения собственного шума
на · выходе МФ в отсутствии звукового сигнала к выходному напряжению ,
которое бы возникло при воздействии звукового давления нулевого уровня ,
то есть р 0
= 2 · 10-s Па:
N •.
= 20lg~ .
Е· Р о
(2.11 )
В конденсаторных МФ величину иш определяет обычно термический
шум · высокоомного входного сопротивления предусилителя (транзисторов,
ламп, диодов и т.д.) . В динамических же МФ нормируют не собстве н ный
шум, а уровень эквивалентного звукового давления, обусловленный
.. ,
'воздействием электромагнитного поля определенной величины на частоте
f = 50 Гц, то
есть воздействие внешней помехи.
Совокупность параметра Е и Nщ
определяет соотношение сигнал­
шум в звуковом тракте, так как МФ является его первым звеном и
источником полезного сигнала. Поэтому снижение величины Е является
вежелательным фактором. Повышение же Е с таким же ростом Nш не
51
способствует улу'-lшению качества, так как соотношение сигнал - шум в
тракте останется неизменным.
с)
Показатели, определяющие защищенность МФ от внешних шумов .
При эксплуатации микрофонов в помещениях и на открытом воздухе
кроме полезного акустического сигнала присутствуют акустические шумы.
Так как всегда стремятся снизить их воздействие на МФ, то важное
значение
(наряду
с
правильным
выбором
рабочего
расстояния
r
до
источника полезного сигнала) имеют также направленные свойства МФ,
наиболее точное представление о которых
направленности ХН (см. раздел
Однако
в
реальных
дает его характеристика
2.2.1).
условиях
использования
микрофона,
когда
помимо основного (записываемого) источника звука сушествует множество
"мнимых" (создаваемых отражениями), а также независимых источников
шума,
более
воздействия
адекватную
этих
коэффициентом
полей
характеристику
позволяет
направленности
защищенности
получить
О.
Его
параметр,
определяют,
как
МФ
от
называемый
отношение
значения квадрата осевой чувствительности МФ в условиях свободного
поля
к
его
значению ,
усредненному
по
всем
направлениям
(по так
называемому диффузному полю) . Естественно, что определение осевой и
диффузной чувствительностей должно производиться на одной и той же
частоте. Аналитически О связан с
П=
R(8)
соотношением
2
М (0°)
2
f R (B)sinttiB
= ---2
2
М(В)
(2.12)
Величина, равная Гn, показывает, во сколько раз соотношение
"полезный сигнал
-
акустический шум" (при условии его диффузности) у
направленного микрофона больше, чем у ненаправленного, помещенного в
ту же '!'очку поля . Так у МФ с ХН "круг" О= 1, с ХН "восьмерка" и
"кардиоида"
0=3,
с ХН "гиперкардиоида"
0 =4,
"суперкардиоида"
0=3,8,
и
Т.Д .
Логарифмический эквивалент О называют индексом направленности
52
!,
то есть
(1.13)
I=IOign.
Все
эти
параметры
характеризуют
соотношением сигнал
акустически~. шум на входе звукового тракта (в первичном поле).
d)
Другие показатели.
~инамический
диапазон
Л14)
nредельного звукового давления
D
За
Nnp
принимают
=
оnределяется
разностью
уровней
и рассмотренного ранее Nш, то есть
Nnp
Nnp- Nш.
уровень
(1 .14)
звукового
давления,
при
коrором
коэффициент гармонических искажений Кг на выходе МФ не nревышает
установленного
в
студийных МФ зто
технической
0,5%,
но бьmает
документации
уровня
(обычно
для
1% или 3%).
~опустимые потери полезного сигнала оnределяются величинами
модуля полного электрического сопротивления или импеданса
сопротивлением
нагрузки
-
Rн,
которым
является
- Zc,
обычно
Ом, и
входное
сопротивление микрофонного усилителя.
Считается, что Rн следует выбирать в пределах sz, ~ R; ~ 1ozc.
Верхний nредел ограничивается ёмкостным соnротивлением кабеля между
МФ и усилителем.
Примениместь МФ в тех или иных условиях эксплуатации зависит
также
от целого ряда конструктивных
и эксnлуатационных nараметров,
таких как размеры, масса, тип и' надежность разъемов, необходимость
питанИя
(для
КМ) ,
наличие
дополнительных
аксессуаров
(подставка,
ветро~ащита, внутренняя и внешняя амортизация, крепления и т.n.).
Например, хороший по акустическим свойствам МФ может оказаться
непригодным для уличных репортажей или систем звукоусиления речи в
шумных или гулких помещениях .
53
2.3.
Акустические антенны
микрофонов:
устройство, физические
процессы, характеристики
2.3.1. Дифракционные
коэффициенты и их характеристики
Свойства акустической
произведением
антенны (АА) аналитически выражаются
характеристик
аJСус.т~комеханического
МФ
чувствительности
коэффициентом
.(см.
D,
двух
звеньев
рис.2.1 ).
В
первая
акустического
соотношении
(2.8)
и
для
дифракционным
представлена
учитывающим изменение давления на поверхностях
препятствия в сравнении с давлением в свободном поле.
Так_, на фронтальном торце (места расположения диафрагмы МФ)
давление
увеличивается
соотношениям
и
(2.2)
за
счет
отраженной
возрастание
(2.3)
волны.
давления,
Согласно
учитываемое
коэффициентом DФ, выразится суммой
D .- & -- l+P"m
ф
-
р
Здесь Рот
-
(2.15)
•
р
давление, создаваемое на поверхности рассматриваемого
торца отраженной от неё волной.
Эффективность
с
отражения
повышением
частоты
звука
увеличивается, так как по мере уменьшения длины волны (в сравнении с
диаметром препятствия) отражение становится
Рот
возрастает,
достигая
на
очень
высоких
направленным и давление
частотах
значения
давления
свободной волны. По этой причине в НЧ части частотного диапазона
коэффициент DФ
В
:::;,] , а в высокочастотной- DФ ""2.
микрофонах
дополнительный
вход
с
двумя
входами
располагается
(см.
обычно
раздел
на
корпуса МФ, представляет интерес коэффициент
2.3.2),
боковой
D6
в
которых
поверхности
боковой дифракции.
Однако скользящая вдоль корпуса волна не претерпевает существенного
рассеяния
от
его
боковой
поверхности .
Поэтому
с
достаточной
для
54
практики точностью полагают
D 6 = 1 во
касается
то
тылового
торца,
всем qастотном диапазоне. Что
происходящие
здесь
дифракционные
процессы, которые в дальнейшем мы будем называть теневой дифракцией ,
проявляются в виде уменьшения давления р.. и коэффициента Dт при
повышении частоты звука, что находится в полном соответствии с законом
сохранения
энергии:
увеличение
энергии
звукового
поля
перед
препятствием должно вызывать такой же дефицит ее за нренятствием .
Аналитические
выражения
для
коэффициентов
DФ
фронтальной
дифракции для препятствий простейших форм могут быть получены путем
решения так называемых краевых задач волновой акустики
[2]. Результаты
эти громоздки и неудобны для инженерных расчетов. Прямые формы
решений для аналогичных задаq теневой дифракции получить не удается.
_ В данном учебном пособии приводится авторское решение, притодное для
расчета дифракционных коэффициентов
как для
тылового торцов цилиндрического препятствия
-
фронтального, так и
наиболее близкой по
форме модели корпуса микрофона. Решение основывается, во-первых, на
теореме взаимности звуковых полей
методе,
примениместь
которого
и, во-вторых, на энергетическом
обусловлена
соблюдением
закона
сохранения энергии.
В соответствии с . принципом взаимности неподвижную отражающую
поверхность определенного размера и формы мы можем заменить таким же
(по форме и размеру) излучателем, колеблющимся со скоростью ~, равной
по величине и обратной · по направлению скорости колебаний воздуха,
создаваемой
падающей
волной
в
месте
расположения
отражающей
поверхности при ее отсутствии .
Применимасть
для
определения
коэффициентов
DФ
и
Dт
энергетического метода оправдана, помимо соблюдения закона сохранения
энергии ,
тем
обстоятельством,
что
для
вычисления
указанных
коэффициентов достаточно знать усредненные по поверхностям торцов
55
значения давлений и нет необходимости в получении информации о
характере распределения их по этим поверхностям или в пространстве
около них.
В
соответствии
с
этими
предпосылками
вычисления энергии груnповых полей
и
общей
методикой
[1] (§ 3.6) можем написать
(2.16)
Здесь
]06, J и Iom -
интенсивности звуковых полей у рассматриваемых
поверхностей, соответственно
общей
/ 00,
падающей
1
и отраженной
Iom
волн; R - значение нормированной функции корреляЦии давлений прямой
и отраженной волн на фронтальной и торцевой поверхностях (для первой
R= 1, для второй R=-1).
Интенсивности можем выразить через соответствующие мощности
прямой волны, приходящ~йся на площадь S = tr-a поверхности торца, и
2
отраженной от торца,
мощности
w•., = ~
равно~ , по теореме
взаимности,
излучаемой
2
· r., (а
-
радиус торца,
rиз
-
сопротивление излучения
поршневоrо излучателя такого же радиуса).
Тот:да
2
w
1=-
s'
Согласно
[1]
(стр.
1
от
= Wn", =~
s
(2.17)
s
202)
(2.18)
где
р0 и с 0 -
плотность воздуха и скорость звука;
первого порядка;
k
=
uJico -
J1
-
функция Бесселя
постоянная распространения.
Мощность прямой волны представим так же, как и отраженной, через
скорость~:
(2.19)
Подставив
(2.17)
и
(2.19)
в
(2.16)
и поделив все члены полученного
56
равенства на ИJ:пенсивность
!1~ =D =1± 2 V
2
.
V' ш
1 падающей волны,
+ r'ш
получим
2
=(1 ± V'ГГ')
w , где
Следовательно,
(2.20)
Ввиду симметричности решения индексы "ф" и "т" в
Введя вновь индексы и учитывая
D = 1 + J;l ф
i
J,"{ika)
1
1
.J,(2ka) 1
(2.21 )
(б).
Графический вид этих соотношений представлен на рис.
2.3.2.
опущены .
окончательно
(а), Dт = 1 -~ 1 - ~ - \
ka
'
(2 .18), имеем
(2.20 )
2.3 .
Акустические характеристики приемных антенн с одним и двумя
входами
Акустические
антенны
микрофонов
реализуются
в
трех
видах :
лриемНИI( давления (рис. 2.4,а) и два тиnа nрме:мНИI(ОВ разности давлений­
симметричный
(рис .2.5,а) и несимметричный
(рис.2.6,а) .
ПриеМНИI(И
разности давлений часто называют для краткости градиептиыми.
Антенны первого типа. (приемники давления) представляют собой диа­
фрагму в виде поршня с массой
m,
прикрепленного с помощью кольцевой
гофрированной подвески с гибкостью с к цилиндрической капсуле, закры­
вающей доступ звуковой волне к задней стороне диафрагмы (см.рис.2.4,а) .
Эквивалентная схема такой антенны представлена на рис.
вызывающая
колебания
диафрагмы ,
зависит
JШШЪ
от
2.4,6.
Сила,
давлепия ,
действующего на открытую сторону, так что
(2.22)
F = p ,. ·S,
где
S= ,. · а
2
- эффективная площадь диафрагмы.
Если 2а<<Л., то величина р,. не зависит от направления прихода звуковой
.
волны и диафрагма будеr колебаться с одной и той же скоростью независи.
мо от ориентации оси антенны. Таким образом, сила
F зависит от давления
s7
. -:-·-
---------- -1.--
2
v
~.
/
f-"
'
1,..
]'...
!--"
-~--.
..Jl') ....
, ..
1'---
"
!'.....
о
o,ot
оо2.
ops
о,2
0,1
Рис.2.3. Ч1ктотr-iЫЕ зАвисимос:т~
ТЫJ10ВОГО
- - -- - - -.--
"""'. z
o,s
5. ка
ФРОНТдi!Ы-юго и
козффtЩИЕНТО\!1 ДИ<РР.'!КЦИЙ
-·----
1
1
Рис.2.lt.АнтЕннд "пР~км~о~ик ддВГlЕния" (а) и ЕЁ 3 3[ (f)
о
Рис.2.5. АнтЕННА "пРиЕмник РАзности дАВ11Е.Ний"(а) и
.
.
ЕЁ ]3С(д)
.
58
и не зависит от угла
(), опредетпощеrо направление прихода звуковой
волны (см. рис. 2.4,а). По этим причиваъr давн:ы:й тип автеiПIЪI получил
название ненаправленного прие.мника или прие.мника звукового давления.
Эrи термины считаются обычно синонимами. Одиа:ко в области высоких
часrот, когда поперечный размер приемной автевны начинает превьппать
длину
волны
А.,
обусловленную
антенны, т.е.
приемник
Явлением
давления
дифракции
приобретает
звуковой
волны
направленнОСТh,
на
поверхности
mражением её от передней поверхности и образованием
"акустической тени" в области задней поверхности приемноrо устройства.
Следовательно,
поверхности
при
падении
увеличивается
волны
(за
спереди
счет
давление
сложения
mраженной волн), при боковом падении (о
=90 8 )
на
давлений
приемной
падаiощей~и
давление не меняется, при
тыловом ..,-:уменьшается, что и является признаком направленности приема.
В сООТветствии с формуламп
( 2.6)
и
( 2.22),
акустико-механическая
ступень иенаправленного микрофона характеризуется соотношением
F
- =S · Y=S,
Антенна
второго
прие:мников разности
рассмmре~я
muna,
относящаяся
давлений,
(2.23)
Y=l
р..,
к
категории
представляет
собой
симметричных
такую
же,
как
ранее, диафрагму, одинаково (симметрично относительно
плоскости прие:много поршня) открытую с обеих сторон (см.рис.2.5,а).
Поэтому понятия "фронтальная" и "тыловая" <.:торона дли неё и:меюr
условный характер.
Звуковое давление действует на диафрагму такой
антенны с двух сторон: на передmою
-
с силой
F" =р · S ,
силой r~ = р · S . e-fkA, т.е. равной по величине силе
по фазе на угол
F",
на задmою
-
с
во отстающей от неё
59
(2.24)
Здесь
2.5 ,а),
-r:d
d-
paccroяme, называемое геометрической базой анrенны (см . рис .
= d 1с 0 -время базового запаздывания.
Таким
образом,
сила
F..,
вЬIЗЬIВЗЮiцая
определяется разностью рассмотренных сил
колебания
диафраrмы,
:
(2.25)
В этом соотношении принято р...,
:;; р ( т.е. давление на поверхностях
диафрагмы не отличается от давления в свободном поле), что вполне
допустимо
в
той
области
частотного
диапазона
(ЧД),
где
действие
дифракционных факторов ещ~ незначительно и можно полагать, что
D"'l .
Эту область будем называть в дальнейшем опорной. Её верхтою частотную
границу можно определить приближенно из условий
(2.26)
в которых
ak -
радиус корпуса анrенны.
Из построений, приведенных на рис .
2.5,а, видно, что при
fJ = о
запаздывание действия волны на заднюю сторону диафрагмы (фронт П) по
сравнению
с
nередней
(фронт
1) ·
определяется
(геометрической базой). При других значениях угла fJ
расстояния
расстояннем
d
оно зависит от
d · cos8, так что
Подставив это значение в
(2.19), получим
F = р · S · (1 -
е - 1~>~"" 8 )
(2 . 27,а)
60
или
(2.27,б)
В опорной области ЧД условие
обычно сопоставима с а 1
•
(2 .26)
Поэтому
справедливо и для базы
d, которая
в этой области
kdcos0 « 1
и
для
У
можно
воспользоваться
приближенным
сооnюшением,
полученным пуrем разложения члена е - 1ы ... е в ряд Маклорева:
е
·ы
., (ысоsеУ + J. (ысоsе)э
- 1- J cosu2!
3!
- jtd ... e_
(2.27,в)
Ограничиваясъ для опорной зоны двумя -членами и подставив их в
въфажения (2.27), получим
F "'jkd · cos8 · pS,
(2.28,а)
У"" jkd · cosO
(2.28,6)
·
Как видим, антенная функция: У в рассматриваемом случае частотнозависима~ т.к.
{i)
(2.29)
kd =- d=mrd
Со
Кроме того, она вюоочает в себя характеристику направленности (ХН)
антенны
антешюй
R(o),
под которой понимается отношение значений силы
F(o)
или
функцииУ при падении волны под углом 8 к их зна•rения:м при
осевом падении, т.е. о = 0° . Из
(2.28,6) следует, что
R(O)=Jkd
::;so
J
cosO •
.
(2.30)
61
Полярная диаграмма этой характеристики представлена на рис.2 . 6 .
Рис.
2.6. Харакrеристика направленности симметричного nриёмника разносrи давлений: ·
R(8) =cos0
В обиходе её называют
"восьмеркой", а антенну рассмотренного типа-
двусторонне направленной (см . §
2.2).
При е =0° , значение R (о 0 )= 1. При боковом падении, когда О = 90°, У
обращается в нуль, так как СИЛЬI
синфазными
и,
вследствие
компенсируются. Поэтому
F,
и F,
встречной
(см. : рис. 2.5,б)становятся
наnравленности,
взаимно
R(90°)= О .
Пределы значений пространствеиного угла В, определяемые условием
о :;; В:;; 90°, ограничивают так называемое переднее полупространство . В
Заднем полупространстве, определяемом услов:иеt.t 90° < В :;; 180°, значения
R(B)
становятся отрицательными . Эrо означает, что волны, падающие на
антенну из заднего полупространства,
проmU8офазные
полупространства.
тем,
которые
вызывают колебания диафрагмы
получаются
от
волн
переднего
62
Наконец,
антенны
третьего
типа
относятся
к
категории
несимметричных приеминков разности давлений, так как в них доступ
звукового давления к передней и задней стороне диафрагмы не одинаков
(рис . 2 . 7,а)_ Диафрагма
1 закрепляется в переднем торце цилиндрического
корпуса, задняя сторона которого затянута тканью
2,
т. е . "акустически
nрозрачным" материалом, создающим ' трение r, _ В результате образуется
так называемый второй вход, к которому примыкает масса воздуха т , , а
заключенный внутри корпуса воздух создает "пружину" гибкостью
с, .
Получившанея структура ЭЭС, которая представлена на рис . 2 .7 ,б в виде Г­
образной цепочки из названных элементов, создает задержку фазы силы
F3 ,
действующей на заднюю сторону диафрагмы, по отношению
.: ·;
Рис_
2.7. Антенна
"несимМетричный при~мник разности давлений"(а) и её электрическая
эквивалентная схема (б):
к
1 - диафрагма, 2 -
ciOie F,, действующей на второй вход,
Таким образом, сила
сначала на время
F;
отсТает от
F"
акустически "прозрачная" ткань
на время т,_ ( см.рис .
2. 7 ,а и 2.7,6).
в результате двухкратной задержки­
т" , обусловленное прохождением базы
d,
потом на время
т,. , создаваемое внутренней структурой . При этом
(2.31)
63
Первое называется базовьш , второе структурньш запаздыванием.
В дальнейшем параметр
kd
время базовой задер.J1ски
rd :
будем выражать согласно формуле
Согласно эквивалентной схеме АМС микрофона (см.рис .
(2.29)
через
2.7,6)
(2.32 ,а)
z2 =r1 + jwm 2 ,
где
Zз
= l / j(!JC 2 .
Подставив значения z1 и ; 3 в (2.32,а), получим
(2.32,6)
Здесь
w;, = 11m c
Частота
1 2
ш 21
резонанса параметров т,
своего рода реперной
и
точкой на частотной
с 2 второго входа является
ШЮIЛе, отделяющей опорную
зону от высокочастотной.
Для опорной зоны, где
и
этимивеличинами в соотношениях
ш'
- 2
ш ,,
<< 1
(2 .32,6)
можно пренебречь и считать
64
Принимая во внимание, что F2 = F; ·e-Jq~г,coso (см . рис. 2 . 7 ,а), имеем для F 3
так что для силы
F, вызывающей колебания диафрагмы,
Тогда антенная функция У
получим
= F 1F, выразится соаrношением
(2 .33 ,а)
или для оnорной зоны
(23J ,б)
Поспеднее выражение nолучено пуtем приближенного представления (см .
раздел
2.3.2)
Взяв отношение
(2.33,6)
к
ero
значеншо при
В = 0°, можем nолучить
формулу для ХН ОДМ в опорной области
(2.34 , а)
Обозначив
_т_d_= В '
'"'+ т .
(2.34,6)
65
получим знакомое по
§ 2.2
сооnюшение
(2.9), т. е .
R(O) = A+Bcose .
В сравнении с
(2 .30)
структурное время
r...,
здесь появился член А, не зависящий от е, т. к.
не зависит от направления прихода волны . Подбирая
разные ОТR()Iпсния между т" и
можно
получить
различные
представленные на рис . 2 . 8.
·r,1
ХН,
Следует
(
при соблюдении условия
рассмотренные
иметь
в
в
разделе
виду, . что
A+B=l),
2.2.1
и
практически
реализуемые ХН не могут в точности соответствовать теоретическим
[3] .
Учашемуся предлагается дать самостоятельно физическое объяснение тому
факту, что при А=В=0,5 тыловая волна
(0=180°)
не вызывает колебаний
диафрагмы (т.е . диафрагма не реагирует на эту волну) .
Рис .
2.8. Вариаmы
характеристик направленности несимметричного приемлика разности
давлений:
1- кардиоида, 2- суперкардиоида.
66
2.4.
КатуmеЧНЬiе
ДIUiамвческие
микрофоны
иенаправленного
приема
2.4.1.
Согласование
требоваНШI к АМС
2.1
звеньев.
Чувствительность
н
.
Общее выражение
в разделе
системных
(2.1)
для чувствительности микрофонов, полученное
на основе функционально-системного ряда (см. рис.
2.1), иrеет
ВИД
Е= _D_·_S_·Y_,_(m_,)'-·М_·К
_
z
Конкретизируем это выражение для пенаправленного микрофона. rрн
этом
примем
во
внимание
отмеченную в разделе
условность
понЯ'ТИЯ
"ненаправленнЬlй",
чувствительность микрофона приемника­
2.2.1 :
давления не зависиr от направления прихода волны: лишь в области н~ких
и, приближенно, средних частот, пока длина звуковой волны А. превыmает
размеры окружности· 21Т12"' его корпуса
(а"'- радиус поперечного сечения
корпуса). Поэтому выражение для чувствительности ~ем раздельнd для
опорной облаСJИ частот, определяемой условием
Итак, для опорной облаСJИ
результатамИ,
полуЧенными в
(2.26), и высоких частот.
D"" 1. Остальные величины в соответствии с
раздед~
1.2
и
2.1,
можем
записать
в
следующем виде:
Y(m) = 1 ,
М=
BL
.
R
К=--н --= К
Rg .,_+Rн
(2.35)
67
R"-
Здесь
наrрузочное
сопротивление
МФ (кабеля
и
входной
цепи
усилителя), R3 к- сопротивление звуковой К3'1)'1IIКИ МФ, У представляет
собой
антенную . характеристику
электрdдИНамического
приеминка
преобразователя,
К
давле1001,
М
коэффицненr
-
КЭМС
-
nередачи
элею:рiiческой цеин микрофона, который в режиме ХХ равен 1, а при
R.=R.. =O,S .
Для
мию:перны:х пультах
увеличения
нагрузочное
несколько килоом, т. е. в
6-10
полезного
сиrнала
R"
сопротивление
раз превьипаеr
в
современных
имеет величину
в
R.,., так что к ... t. Подставив
эти значения в общее соотношение для Е, получим
1'
..
Е
В
облас-m
высоких
= _S_
· B_f_
.К
_
частот
днфракциоННЬlХ факторов (см . _
(2.36)
.
z
существеННЪIМ
(0=0°)
вл:иянне
в связи с чем соотношение
2.3),
приГодно лишь при боковом падении волны:
падающих с фропrальной
становится
и тыловой
( 8 = 90
8
Для воJШ же,
).
(8 =180°)
(2.36)
сторон,
в это
соотношение следует ввес-m дифракционные коэффициенrы:, выражаемые
соответственно формулами (2 .21,а) и
(2.21,6) :
(2.37)
Из этих соопюшений (см. также рис.2.3) очевидно, что с повьипением
частоты фронтальная чувствительность возрастает (в пределе удваивается);
ТЬIЛовая
-
убывает, боковая не изменяется, т. е. микрофон приобретает
направленность, обостряющуюся с частотой.
В
Выражении
сопроrивления
z
(2.36)
известны
все
акустикомеханнческой
величины
системы
за
(АМС)
исЮIЮчением
микрофо:Вi.
68
Поскольку все остальные величины
(S,
Вl и К) от частоты не зависят, то
обеспечить частотную независимость чувствительности можно JШIПЪ при
условии
z = r=const .
Однако выполнение этого условия в достаточно широком диа!fазоне
частот требует столь больших значений трения
r,
что получаемая при этом
чувствительность Е становится практически нецелесообразпой из-за очень
м:~ой (сопоставимой с помехами) величины.
Поэтому для реализации динамических мюqюфонов был избран другой
путь
-
создания сложных АМС, позволяющих обеспечить условие z
=consl
при сравнительно неболыпих значениях модуля полного механического
сопротивления
2.4.2.
Устройство и структура
ДинамиЧеский
показано
i.
микрофон
па рис .
2 . 9,а,
раздеJШТЬ на три части:
-
приемник
давления,
фуmщионально,
:ка:к
и
устройство
которого
конструктивно,
можно
а) магнитную систему, б) подвижную систему,
в) акустическую структуру.
Магнитная система (МС) состоит из постоянного магнита 7,отлитого
из специальных маrнитотвердых сплавов с высокой остаточной индукцией,
намагниченного в осевом направлении. Его нижний торец установлен в
стакане
8,
а к верхнему прикрепляется керн
4.
По верхнему коНТуру на
стакане закрепляется верхний (или передний) фланец
9,
имеющий вид диска
с центральНЬlМ отверстием, диаметр которого превышает диаметр керна, так
что междУ
боковой поверхностью керна и внутренним торцом 1ланца
образуется кольцевой зазор, в котором создается сильное и равномерное
магнитное поле радиального (если смотреть сверху) направления. Таким
69
образом, магnит
7
является источником мa:rmrnюro потока, стакан же
фланец
4
образуют магнитопровод, подводящий маrнитный поток
9
и керн
к зазору ма:гниrной цепи (МЦ). По этой причнне
8,
они изготавливаются из
мягкой малоуглеродистой стали (железа), обладающей высокой ма:гн:иmой
проницаемостью и очень малой осrаточной индукцией. В зависимосm от
назначения и области использования МФ диамеtр стакана может бытъ
разuым.- от
15 до 40
Подвижная
диафрагму
Рис.
2.9.
мм , ширина же зазора
система
(ПС)
1, к КОН1УРУ которой
8,., 0,4 + О,б.мм.
представляет
собой
~олообразuую
подклеивается звуковаs,._катушка
3
П
Конструкция (а) и струк11'рН&Я модель (б) иенаправленного динамического
микрофона:
1 - диафрагма с звуковой каrушкой 3
"воротника" (гибкосrь С 1 ) ;
(масса
m1 ) ; 2 -
4- керн с каналами 5,
ооздающаJiаrrивное сопротивление
подвес в виде гофрированного
формирующими массу
m2 ; 6- ткань,
r2 ; 7 - · nooroJI.RНЬIЙ мarnиr; 8 и 9- "стахан" и
передний фланец магниrиой системы (ограничиВаемый ими обьём воздуха создает
гибкость с 2 );
кольцевой
подвес
2
10 -
прокладка;
(напоминающий
11- "заглушка".
по
форме
половинку
внеппmй КОН1УР которого закрепляется вместе проЮiадкой
При этом каrушка
3,
1О
тороида),
на фланце
9.
попадающая в зазор МЦ, должна быть щательно
отцентрирована, чтобы при колебаниях она не задевала ни фланца ,
ни
70
керна. Таким образом, ПС образует механическую колебательную сиетему
(МКС) микрофона (рис.2.9,6), состоящую из массы
m1 , подвешенной на
, пружине с гибкостью С 1 •
Масса~ вюпочает в себя массы mk катушки и тd -диафрагмы, т.е .
Акустическая структура (см . рИс. 2 .9,б) создается с номощью системы
1
взаимосвязанных отверстий и полостей внуrри корпуса микрофона. Из
потока воздуха, приводимого в движение диафрагмой, они форюtруют
акустичес:кие элементы - массы, упругости, трения. Такую структуру Jудем
показыватъ
в
упрощенном
виде,
с
помощью
устройств,
подобных
изображенному на рис. 2 . 9,б (структурных моделей).
В рассматриваемом случае акустическая Структура формируется двумя
полостями (под диафрагмой, гибкость воздуха в которой обозначена с 3 , и
внуrри стакана
- с2 )
и системой отверстий
5
в керне, связывающих между
собой названные полости. Воздух в этих сквозных отверстиях создает ~ассу
m 2 , а ткань
.
.
6, закрывающая их вход, трение
ранее деталь
11
1
r 2 • Ещё одна, не упоминавшаяся
(заглушка из пластмассы или неферромагнитного металла)
предотиратает образование неподдающегося управлению потока воздуха
через зазор магнитной цепи.
2.4.3.
Эквивалентная схема. Подбор параметров
На pиc.i. lO представлены динамическая модель АМС микрофоНf (а),
составленная на основе рис.2 . 9,б, и эквивалентные электричес:кие сцмы
полная (б) и приведеиная к площади диафрагмы
параметры т;
, с;,
и
S1
-
(в) . В последней рхеме
r; выражаются соотношениями
с'= ~
2
2
n\2
'
(2.38)
71
т.е . представляют собой значения массы воздуха
гибкости воздуха с 2 (в стакане) и трения
приведенные к шющади диафрагмы
в разделе
2.4.1,
r, (
создаваемого тканью),
S 1 (S2 - площадь сечения керновых
каналов) через коэффициент трансформации
Как показано
(в керновых каналах),
m2
n12 = S/ S2
•
задачей АМС является
обеспечение
постоянства (частоmой независимости) :модуля входного сопротивления
рассматриваемой схемы, что позвоmп реализовать поотоянство "тока"
i
1 ,
z
т.е.
скорости колебаний диафрагмы и катушки (массы m1 ) .
z.
Рис.2. 10.Динам:ичесКIU! модель (а) и электрические эiСВиваленmые схемы
микрофона: б) - полнiUI, в) - приведении к площади диафрагмы
S1 .
На первый взгляд обшmе в схе~е реактивных злементов при одном лишь
активном
r;
(треще
позволяет решить
:ny
r1
.
в подвесе проигнорировано ввиду малости) не
.
задачу. Однако
пуtе:м соответствующего подбора
парамсщюв полученная струюура может быть . превращена в Т - образный
полосовой фильтр, входное сопротивление которого в полосе прозрачвости.
постоянно и равно сопротивлению нагрузки
[1]
(стр.46). В схеме рис.
2.10,
в для этого необходимо выполнить условия
.
z
z=_L
2
2
J
(2.39)
72
Здесь
r.;-характеристическое сопротивление фильтра, которое раскроем несколько
позже.
Из
следует, что параметры
(2.39)
т;
и
с;
должны удовлетворять
услоsиям
т'=
mt
так
что
(2.40)
2
2
резонансные
ш 11
частоты
подвижной
вну:rрикорпусного резонатора будут одинаковыми
l
системы
и
:
1
(2.41)
шн= ~т,с, =ю22 = ~т;с;
Для
определения
граничных
частот,
в
пределах
рассматриваемая АМС позволит удовлетворить требование
рассмотрим
приближенные
ЭЭС,
ш 22
сооrветствующие
разным
z
которых
=
const . ,
частотным
областям, положение которых на частотной оси удобно ори~ровать по
отношению к резонансной частоте ш 11 резонанса ПС микрофона. Объем
воздуха под диафрагмой, формирующий гибкость С 3 (см. рис. 2 . 9,а и 2.9,б),
существенно мал в сравнении с объемом воздуха в стакане, формирующим
гибкосТь
с2 •
По
этой
причине
:влmпmе
С3
будет
сказываться
на
характеристике фильтра лишь вблизи верхней границы ЧД микрофона, а на
частотах ниже ш 11 или близких к ней ею можно пренебречь. Тогда ЭЭС
преДСтанут в формах, приводимых на рис. 2.11,а и 2 . 11 ,б.
В области более в:ысок:их частот, когда ш > ш 11
т,с,
и
1n;c;
и am, > 1/шс,, от контуров
можно оставить лишь массы т, и т; = т,/2, которыми в этой
области они будут управляться . В этом случае АМС микрофона отобразится
ЭЭС в виде простейшего Т- образного фильтра НЧ (рис.2 . 11,в).
73
Рис .
2.11. Приближенные эле~сrрические эквивале!ПНЬiе схемы микрофона:
а- для
низких частот ( ro < ro 11 ) ; б - для нижней резонансной частоты ( ro =ш 11 ); ~средних и высоких частот ( ш
-
для
>> Ф 11 )
Верхняя граничная частота ТЗIСого фильтра определится сооmошением
(2.42)
Оно
предполагает,
что
фильтр
характеристическое· сопротивление
r; =r.
=
при
этом
нагружен
на
своё
·
rm,
v~
=
rовт•
(2.43)
2
ТШсим образом, определяюЩИМ ДЛЯ Шв ЯВЛЯетсЯ реЗОНанС Между МасСОЙ
nlt nодвижной системы МФ и гибкостью С3 объема воздуха между куnолом
диафрагмы и керном, т.е. верхняя резонансная частmа.
Нижняя
граничная
частота
шн
определяется
нижней
частотой
резонанса w11 (между массой ~ и гибкостью подвеса С1 ) . Из сопоставлениЯ
ЭЭС рис.2.11,а и
2.11,6 очевидно, что в частотной области ro
~ _ F ""
1
-
z
< Ш 11
F · шс1 • 2
~9+4·(шс 1 · r 0 ) 2
74
т.е. при снижении частоты скорость колебаний ПС уменьшается примерно с
круrизной
6
дБ/окт. Поэтому моЖно полагать. что опорная полоса частот
ограничивается снизу частотой
(2.44)
а реализуемый ЧД характеризуется отношением частот
(2.45)
Таким: ' образом. при выполнении условий (2.40) - (2.44) импеданс
z
АМС микрофона не зависит от частоты 11 выражается соотношениями
(2.43).
Подставив
(2.43) в (2.36). получим
Е..,
2 К"' 1,
Поскольку
то
2S·Вl·K
приближенную
оценку
чувствительности
микрофона в опорной полосе можно производить по формуле
..
Е."
S·Вl
_
_
(2.46)
Это соотношение отражает основное противоречие, возникающее при
стремлении
повысить
чувствительности
чувствительность
микрофона
микрофона:
необходимо
уменьшить
для
его
увеличения
частотный
диапазон.
Более
подробные сведения по ДМ
почерпнуrъ из
[1]
(стр.
295-300).
-
приемпику давления можно
75
2.5.
Катуmечны:е
ДIПiамичесJQfе
микрофоны
с
односторонней
направленностью
2.5.1.
Устройство и эквивалентная схема
ОдностороiШе напраnлепНЪiе динамические микрофоны (ОДМ) находят
широкое
применение
в
системах
звукоусШiения
радиовещании,
музыки
и
речевых. телевизиоiШЫХ
речи
в
концертных
залах,
С'I)'диях,
стадионах,
театрах и конфере~~ц,-системах. Уступая конденсаторНЪiм микрофонам до
~·.
чувствительности,
величине
неравномерности ЧХЧ
\
"гладкости"её)
(
и.
некоторым другим параметрам, они вместе с тем имеют ряд неоспоримъrх
достоинств; главными из
которых можно назвать:
- ·простоту конс-rрукции и технологии изготовления;
-
отсуrствие
необходимости
в
источниках
питания
и
влажности
и
вс-rроеННЪIХ предусилителях;
-
меныдую
чувствиrс;льность
к
повЫiilениой
изменениям темпертуры окружающей среды (например, при
переходе из помещения на оrкръrrый воздух);
-
меньшую
"рор"
чувствительность
помехам
к
ветровым
(приближении
и
так
называемым
микрофона
ко
pty
исполнителя);
-
большую надежность в "жecтiQIX" условиях эксплуатации;
-
меньшую стоимость (диапазон стоимостей профессиональных
ОДМ от
60
до
600
долларов, конденсаторных
-
:ОТ
300
до
6000).
На рис. 2.12,а представлена ТИПОЩiЯ конструкция капсюля ОДМ. В
основной части она совпадает с конс-rрукцией иенаправленного микрофона
(см.
рис.
2.9,а.), т.е.
состоит из магнитной
цепи (МЦ), формируемой
76
постоJIННЬlМ магнитом
системы
(ПС),
7,
керном
состоящей
куполообразной диафрагме
из
1,
4
и магнитным стаканом
звуковой
:катушки
3,
8,
и подвижной
подклеенной
и упругой подвески (гофра)
2.
к
Внутренний
котур гофра подклеивается к ЗК и диафрагме, а внешний с помоiЦЬЮ
прокладки
1О
укрепляется
на фланце
9.
При
этом
ЗК должна бъrrь
отцентрирована в зазоре МЦ, т.~, не должна касэ:rъся фланца
9 или керна 4.
Основным отличием конструкции ОДМ от НДМ состоит в том, что в
ш
2
~
1д
.
12
Рис.
2.12. Конструкция (а) и
струхтурная модель (б) однонаправленного динамического
микрофона:
1- диафрагма с звуковой катушкой 3 (масса m0 ) ; 2- подвес в виде гофрированного
воротника (гибкостьс1 и активное сопротивление r0 ) ; 4- керн; 7- ПОСТОIIННЫЙ малнrr;
9 и 8 - передний фланец и стахан малштной системы с отверстия:ми 5 второго входа,
формирующими, совместно с тканью 6, параметры m 2 и r2 ; 1О - про кладка; 11- корпус
ВЧ корректора с отверстием, затянутым тканью 12; 13 - антифоиовая катушка; 14ДОПО.JIНifrеЛЬИЫЙ обЬl!м.
стенках ~а
8
имеется серия отверстий
5,
составляющих в совокуnносrи
второй вход, с помощью I<оторого осуществляется направленность приема
звука. Po.Jiъ этого входа подробно рассмотрена в разделе 2.3 (см.2.3 .2 и
рис.2 .7,а). Здесь лишъ
напомним, что второй вход открывает доступ
звукового давления к задней стороне диафрагмы с дополнительной (к
77 .
геометрической базе
d)
задержкой фазы сигнала с помощью активного . и
упругого сопротивлений. Активное сопротив-ление создается акустически
"прозрачной" тканью
6
(шелка или фетра), зак..рывающей отверстия
упругое- объемом воздуха
внутри стаканов
V2
5,
а
8 и 14.
Кроме · перечисленных устройств, в конструкциях ОДМ используются
также дополнительные элемеНТЬI, · nредна:шачеJШЫе либо для уменьшения
помех, либо для коррекции ЧХЧ в ВЧ или НЧ областях заданного
частотного диапазона (ЧД). Например, накладка
11,
представля:ющая собой
неглубокую крышку С отверстием В Центре, закрЫ'IЪIМ тканью
12, ПОЗвОЛЯет
откорректировать ЧХЧ в области верхней границы ЧД. "Стакан" с объемом
14, соединенным
отверстиями
(также с трением, создаваемым тканью
15
с объемом мапштного сrакана
8, дает возможность уменьшнть спад ЧХЧ на
нижней границе ЧД вследствие увеличения объема
Для
уменьшения
электромалmтными
наматываемая
на
помех,
полями,
. корпус
16)
наводимых
применяется
капсюля
V2 •
зк
на
специальная
(она
называется
внешними
катушка
13,
"антифоновой"
катуiш<ой).
Указаннъ1е
средства
коррекции
ЧХЧ
применяются
в
специальных
широкополосных микрофонах. Поэтому .L()IЯ анализа АМС и выявления
основных требований к её струю:уре и параметрам ограничимся типовой
конструкцией без указанных корректирующих э~емеlfГОв (см. рис. 2.12,а).
На рис.2.12,б представлена упрощенная струюурная модель, в которой
нодвижная система моделируется диском . с массой
гофрированном
подвесе
с
гибкостью
С1 .
m0 ,
Символом
совокупная гибкость ~здуха, находяmеrося в объемах
:куuолом
диафрагмы
и
под
тороидальным
подвешенным на
V3
с3
обозначена
под сферическим
воротником
подвеса.
При
движении диафрагмы вправо этот воздух "выталкивается" через зазор МЦ
шириной 8 в объеме V2 стаканов
8 и 14, преодолевая
сопротивление массы
78
и трения
m3
r3
в просветах между ЗК и боковыми поверхностями керна и
фланца. Гибкость, формируемая воздухом в объеме
масса и трение в отверстиях
Сопротивление трения
V2 ,
обозначена С 2 , а
5 второго входа - соответственно m 2
r0
и
r2 •
учитывает активные потери, обусловленные
двумя прИ'IИНами :
а) впуrренним трением в гофре икотурезакрепления- r"." ;
б)
"фиктивным"
сопротивлением
rвн ,
внесенным
из
электрической цепи (см.1.2.3):
(2.47)
где
R,.
иR.- электрические активные сопротивления ЗК и нагрузки на
выходеМФ.
Следовательно,
r0 = rmp + rвн .
Как
правило,
нагружен на стандарmое сопроrивление линии
сам
(250
или
выход
600
микрофона
Ом),
rmp << r8н,
так что можно полагать 70 "" Г8н .
['=
f:. е -jкdcoJI
2
1
Рис.
2. 13. Электрические эквиваленrные схемы ОДМ:
полная (а) и упрощенная (б).
79
На рис.2 . 13 ,а представлена ЭЭС, составленная на основе структурной
модели
по методике, rюдробн6 рассмотренной при анализе АМС
2.12,5,
неваправленного микрофона (см. раздел
2.4.3).
Учащемуся надлежит самостоятельно составиТь динаМическую модель
и ээс ОДМ
n\2 =sl 1s2)
-
полную (с трансформаторНЬIМИ связями
sl.
и приведеиную к шющади диафрагмы
работы следует ориентироваться на рис.
изложенную в разделе
и
2.9, 2.10
n \3
= sl 1Sз
и
Для облеrчения
и методаку, .
2.11
2.4 .3 .
Некоторые nараметры полной ЭЭС (см .рис . 2 . 13,а), например с 3 и т; , в
опорной области ЧД не оказывают существенного влияния на ЧХЧ и ХН
микрофона.
Поэтому
из
упрощенной
ЭЭС
(рис . 2 . 13,б)
гибкость
с3
исюпочена, а масса т; , хоть и вюпочена в схему, при анализе характеристик
МФ
в оnорной области может быть проигнорирована. Эrо позволяет
объединить массы т0 и т;= n;3
При
таких
практически
упрощениях
совпадает
со
2
3
•т
и трения
ЭЭС
Одм,
схемой
r0
и
r;, полагая
представленная
(см.
рис.2 . 7,б)
приеминка разности давлений, рассмотренного в разделе
2.5.2.
Комплекснаа
математическая
·модель
на рис .2.13,б,
несимметричного
2.3 .2.
чувствительности
в
направленности ОДМ
Нижеследующий приближенный анализ достаточен для изучения данного
вопроса · студентами,
не
специалнзирующвмися в
обласТи
акУстики.
Сrуденrам групп специализации, а также магистрантам и аспирантам эти
80
разделы
следует
приложениях
изучать
в
более
строгом
изложении,
приводимом в
1 и 2.
Приведеиная
ранее
упрощенная
ЭЭС
(см .рис. 2 . 1З,б)
позволяет
построить комплексную математическую модель ОДМ для расчета ЧХЧ и
ХН микрофона. Такая модель может бытъ получена на основе общего
системного выражения
(2.8.) для чув~ительности микрофона:
Е -- D(ш,8)·У(ш,8) · S ·М · К
Здесь S
.
(2.48)
= S1 - площадь диафрагмы, М = Bl и К= Rн I(R". + Rн )- величины
постоянные
. Механическое сопротивление подвижной системы
(2.49)
зависит от частоты .
Характеристики У и
D,
сооrветственно антенная и дифракционная,
являются функциями как частоты
пространствеиная
зависимость
ш, так и направления 8 . Частотно­
последней
выражается формулой
(2.20),
согласно которой при8 =о<)
а при
.,
8=180°
При
8 = 90°,
т. е.
фланговом
направлении
падения
звука,
дифракционный фактор определяется волной, скользящей по диафрагме,
так что до тех пор, пока её диаметр меньwе ~длины воJ~I~ЬI.можно полагать
D(90°),.,1 .
В
противном
случае
(на
очень
высоких
частотах)
дифракционный
коэффициент может принимать числовые значения меньше еднницы
[5].
81
В соответствии с этим сооrношение, пригодное для вычисления
mобом угле е (<УГ о• до 180°), можно получить из
(2.20),
D
при
введя в него
функцию направленности
D(ш,e)=l+cose · F::
Из
получаются
(2.50)
е= о е ,90° и
все
рассм<rrренные
.
(2.50)
частные
сооrношения
при
180° .
Част<УГИо-просrранственную
характеристику
У
можно
получить
из
(2.33,б):
(2.51)
где
Подставив
(2.49), (2.50) и (2.51)
в
(2.48),
получим
(2.52)
Это
модель
соотношение,
представляющее
чувствительности
ОДМ,
комплексную
имеет
математическую
приближённый
характер,
обусловленный нижеследующими ограничениями:
1.
Сферическая форма фронта волны, падающей на диафрагму,
заменяется
wюской,
что
искажает
·
характер
частотной
зависимости Е в области нижней границы ЧД .
2.
Функция
воздействия
е
- joxd-oos8
,
звуковой
приближённым
выражающая
волны
сО<УГНоmением
на
базовое
второй
(2 .28,а),
запаздывание
вход,
заменяется
полученным
путем
замены этой функции двумя членами p1rinoжe~ её в ряд
82
Маклорена, что допустимо лиmъ для НЧ и опорной области . На
ВЧ следует учитывать также и третий член ряда.
3.
Взаимосвязь между силами F2
соотношением
(2.32,в)
и F, учитывается приближеННЪIМ
вместо
иренебрежению действием массы воздуха
неиригодно для ВЧ, когда · ш ~ ш 22
что
(2.32,6),
равносильно
m 2 второго входа, что
=11 Jm 2c2
•
Влияние этих факторов будет рассмотрено ниже.
2.5.3.
Харакrеристики ОДМ в опорной и НЧ областях ЧД
В этой области принимаем
z, "'от,
и
r;,. "'о. Использовав эти упрощения в
(2.52), получим
Е=
S1 - В/ - К
т,
(т,. +т 4 ·соsВ)
Следовательно, ХН, представляемая оmошением
(2.53)
Е/Е(О ), выразится:
0
форм}'лой
R(O)= .-... +т 4 ·cosO
т,.. +тd
Воспользовавшись введенны:мн ранее коэффициентами (см.2.3.2)
3 ...' ·.
имеем
R(O)=A+BcosO ,
что совпадает с формула:мн
(2.9) и (2.34).
(2 .54)
83
Как очевидно из
форма ХН зависит от коэффициешов А и В,
(2.54),
сумма которых
A+B = l ,
а числеiПIЫе значения определяют пропорции,
задержки
т= r,.
по которым полное время
+ r4 разделя:ется на базовую т4 и стр)!К,турную т,.части.
Первая зависит от размера геометрп.ческой базы
акустических параметров
r1 c 2
Так при r 4 =r,.=rl2.
d,
вторая
-
подбора
второго входа.
, т.е. А= В
=0,5,
направленность выразится
функцией
1
R(0) = -(1+cos0)
2
графически представляемой кривой
При А =
1/3
1 ( см .
рис.2 . 8), называемой кардиоида.
В = А =2/З
и
функцией _;
1
R(O) =-(1 + 2cos0) .
3
Ей соответствует кривая
2, называемая суперкардиоида,
и т. д.
Чтобы оценить тип ХН, практически достаточно знать два соотношения :
"фронт-тъm" IR(0°)/ R(l80°~ и "фронт-фланг" jR(0°)/ R(90°~.
Так, для кардиоиды
Для суперкардиоиды
ьфм
=3
84
По этим данным можно · определить коэффициеНТЬI А и В и по формуле
(2.54)-
построить ХН. Оrметим, что для оценки величин вФО< и вфф обычно
пользуются их логарифмическими формами, выражаемыми в _дБ:
(2.55)
Рассмотрим
теперь
характеристики
ОДМ
на
НЧ,
т.е.
частотах,
попадающих в область
ш <Шн =11
В
области,
находящейся
ниже
Jm c
1 1
опорной
•
зоны,
изменяется
харакгер
механического сопротивления z1 : в области ш < шн оно приобретает уnругий
характер ( z 1
..,
I/шс 1 ) и соотношение
(2.52)
принимает вид
(2.56)
т.е.
· чувсrвительность
кругизной
уменьшается
(при
поиижении
12 дБ!окт (в четыре раза при двухкратном
Таким образом, причиной
ограничения
частоты)
с
изменении частоты) .
частотной характеристики
чувсrвительности ОДМ со стороны низких частот Я8ЛЯется резонанс ПС
на частоте шн, ниже которой инерционное сопротивление
a:m1
сменяется
на упругое 1/шс 1 •
Кроме того, в области НЧ на ЧХЧ оказывает существенное влияние также
и антенный фактор, выражающийся в усилении действия сферичности
формы фронта волны . Этот вопрос рассмотрен в разделе
С
некоторыми
особенностями
познакомиться по работе
[4] .
подбора
2.5.5.
параметров
ОДМ
можно
85
2.5.4.
Частотно-просrравственные характеристнкн ОДМ в области
высоких частот
В
:ny
ш 12
область входит резонансная частота
(параметров второго
входа m2 н
с 2 ), её ближайшая окресnюсть со стороны опорной зоны
(примерно от
0,5 ro22 )
области
принятая
и все вышележащие частоты (ш > ш 22 ). Для этой
ранее
степе,нъ
приближенности
(игнорирование
инерционной составляющей. импеданса второго входа йm 2 и ограничение
двумя членами разложения фуmщии г- 1""•-е в ряд Маклорена) становится
недостаточной . Поэтому в выражении (2 . 32,а) используем полную форму
z2
==r2 + }01n 2 ,
а взаимосвязь силы
соотношением,
основанным
на
F;
с
трёх
F2
представим более точным
членах
разложения
функции
заnаздывания сигнала, действующего на второй вход, т.е. считая
Тогда
1- .]·сит d
2 2
2
cosO - .!.ш
2 rd • cos О
F 3 == F, · ---......,..-~---­
I-m2 /ш; + }т,.
и анrеяная функция У(ш, О)==(F, - F 3 }1F,
приложение
выразится сооnющением (см.
2)
(2.57)
В сравнении с
(2.51)
для опорной области здесь появшпотся частотно­
зависимые вещественные члены ш 2 1ш; и O,Sr~
cos1 О, влияние которых в
числителе для фронтального и тылового направлений (когда .
cos 2 О== 1)
86
можно скомпенсировать, подобрав параметры второго входа
(m 2
и
с 2 ) так,
чтобы выполнялись условия
(2.58)
К сожаленшо, реализация этих условий не всегда возможна.
В знаменателе же влияние члена
Если условие
(2.58)
(1)
2
1(J)~ неустранимо.
выполнено, то на частоте
(1) 22
для фронтальной
волны
т.е. имеет .место резонансный подъем чувствительности величиной
LW((J) 22 )= - 20lgA.
Для более высоких частот, определяемых условием
(J) >(1)22
при выполнении
-
(2.58)
получим (см. приложение
(а)
1
~А 2 +(J) 2 т; ·В 2 14
для тылового направления
У(180° )'"'
-
2):
для фронтального направления (о= 0°)
У(Оо )"'
-
или
(о = 180°)
А-В
~А 2 +(J) 2 т; ·В 2 /4
(б)
(2.59)
для флангового направления (о= 90°)
f(90 8 ):.:1 .
(в)
Как видим, для фронтального и тылового направлений падения волны
~пие чувствительности с частотой будет обусловлено не только
87
сопротивлением
z, "'am,
подвижной системы, но и частотной зависимостью
антенной функции.
Таким
образом,
основной
причиной
начала
спада
ЧХЧ
рассма1риваемого микрофона на ВЧ (т. е. ограничения ЧХЧ в области
высоких частот) является изменение xapaюilepa частотной зависимости
антенной функции, обусловленное резонансом параметров
m2
и
с 2 второго
входа .
Что
касается
перепада
чувствителъностей
"фронт-тыл",
области он не может бьrrь выражен лшnь отношением (2.59,а) и
на высоких частотах основная причина направленности
дифракции, определяемое соотношением
2.5.5.
-
то
в
ВЧ
(2.59,6), тж.
влияние явлеция
(2.50) для функции D .
ВJIИЯННе сферичности фронта волны па визкнх частотах
Приведениый в предыдущих разделах анализ свойств ОДМ осп:о­
вывался на предположении о плоской форме фронта воЛRЫ, в поле котоР\>й
установлен микрофон. Такое предположение вполне корректно, еслИ
расстояние
R
от п:сточннка звука достаточно велико в сравнении с длиной
воШIЪI илн, точнее,
,t
R>- .
2
В этом случае можп:о полагать, что база
d << R ,
что
делает несущеетвенной разницу
в
амrumтудах сил
F; (t)
и
F 2 (t),
действующих на первый и второй вход МФ, и позволяет приписывать
разницу их мгп:овенных значений только сдвиrу по фазе, т.е. считать
F2 =F, - е- 1 """• ( см. раздел 2.3.2).
88
Однако на малых частотах, когда длина волны становится больШе
R
(например, на частоте 50Гц длина волны равна 6,8м) или когда микрофон
придвинут
очень
nредnоложение
свойством
близко
к
становится
сферической
тубам
неверным,
волны
вокалиста
т.к.
(давление
в
или
оратора,
соответствии
обратно
с
такое
основным
пропорционально
расстоянию) давление p 2 (t) будет отличаться от p 1 (j) не только по фазе, но
и вследствие уменьшения амnлитуды
[1].
Следовательно, с учетом обоих факторов
F.2 == F.1 •
Здесь
R
R+dcosB
·е
• о "'" F'1 •
-J= ...
(l
[2]
d cos е) ·е -jс:н,ооео
(2.60)
- - ·-
R
R и R +dcos(} - расстояние от источника звука до первого и
второго входов микрофона.
Тогда в соответствии с выкладками, приводимыми в приложении
.
.
d
.
. г(
) dcos(} ]
У(ю, В) =]ОJ(т,. + т 4 cosB) +-cosB =JIOL z-,c + тd cosO + - . R
]IOR
В отлИчие от
2,
. (2.6l,a)
(2.51) для моекой волны здесь nоявился член d · cosB 1юR ,
значимость которого растет по мере понижения частоты, а также зависит от
направления прихода волны.
Так, для волны фронтального наnравления модуль
(2.6l,a)
выразится
соотношением
(2.61,6)
а для волны, приходящей с тыла,
(2.61,в)
89
Как видим, поправка на сферичность фронта имеет для тыловой воJПIЪI
большую значимость, чем для фронтальной, т.к. разностная величина
( -rrt- тd) мала или (для кардиоиды) равна нуmо.
Однако и для фронтальной волны член d 1tuR
нелъзя игнорировать,
особенно в области НЧ. Покажем это пуrем качеетвеiШЫХ оценок, приняв~
что на векоторой граничной частоте т = mzp основной и поправочный члены
в
(2.61,6) становятся одинаковыми, т.е.
(2 .62,а)
Определим
примерное
значение
этой
частоты
для
микрофона
с
кардиоидной ХН, для которой
d
r,c =-rd =- '
Со
На основе практических набmодений примем для расчетов
численных значеНШI раССТОЯНИJI
Первое
используется
(2.62,6)
два
R:
вокалистами
использовании микрофона, второе
-
поп-
и
рQ<-музы:ки
при
ручном
звукорежиссерами при передаче или
записи инструментальной музыки (в среднем).
Условия
(2.62) позволяют опредеmпь / zp:
d
d
Со
21rftP ·R
т,.+т 4 = 2 -=---
Подставив в последнюю из формул
получим
,
f =~"'
4trR
(2:63) чнслеВНЪiе значения
(2.63)
Я.. и
R2 ,
90
j ."1 ,.. 540Гц ,
j "' 2
"'54Гц
_
Как видим, изтоблеННЪIЙ поп- и р<Ж-певцами способ использования
микроф9нов (почти прижатым ко
JYIY)
вызывает значительные искажения
спектра голоса начиная от 500Гц и ниже, т.е. в большей части диапазона
голосов
( как правило,
весьма пеширокого) этих вокалистов .
При расположении микрофона на расстоянии
искажения ЧХЧ
ОДМ переносятся в
0,5
м от источника звука
область контр- и
субконтроктав
музыкального диапазона, где их влияние н~ столь велико, так как в этой
.
\
части частотной характеристики ОДМ набmодается спад, причины которого
были рассмотрены выше, при выводе выражения
Другим
(2.56).
результатом сферичности фронта волны ~ется изменение
формы характеристики направленности микрофона на низких частотах_
Действительно, подставив в формулы (2.61,б), (2.61,в) условия (2 . 62,б)
реализации кардиоидной ХН и используя полученные соотношения для
вычисления перепада чувствитеЛьностей "фронт-тыл", имеем
.Напоминаем, что для кардиоиды ВФт ~оо _ Здесь же по мере понижения
частоты
ВФт ~1,
приближаются
зависящая
друг
только
т. е.
к
от
фронтальная
другу.
времени
и
Боковая
r,.,
же
тыловая
чувствiпелъности
чувствительность
остается
неизменной .
(8 = 90" ),
Нетрудно
' Догадсrrься, что ХН при этом становится похо)J(Е!Й на восьмерку, правда, с
широким "поясом", обусловленным боковой чУвствительностью.
На рис.2.14 приведены примеры практически получаемых фронтальной,
.;,шшrовой и тыловой ЧХЧ ОДМ с учетом сферичности фронта волны на НЧ
(сплошные линии) и без учета (прерывистые линии).
91
-S
-10
-15
-20
''
-25
Рис.
''
'
2.14. Графики неравномерности чаСТСУIНЫХ характеристик ОДМ с примерно
кардиоидной ХН: фронrалъной
1 и тыловой 2 -для сферической волны; фроиrальной 3 и
ТЬIЛовой 4 -для звуковой волны nри R=O,Sм
5 - боковой (В = 90°) - для обоих типов волн.
2.6 .
Ленточны:е
направлеiПfостью
2.6.1.
В
микрофоны
динамические
двусторонuей
с
.
Устройство и экви:валеитиаи схема
левточном
используется
мmqюфоне
гофрированная
металлическая левточка
ЛМ
по
Ь
может
в
качестве
концам
из · фольги
шириной
Конструктивно
(ЛМ)
(обычно,
1,5 + 2,0
=
быть
(для
мм:
вШiолнен
подвижного
элемента
увеличения
гибкости)
алю:миниевой)
толщиной
и
как
длиной
1=20 + 40.мм .
рассмотреiiНЫЙ
ранее
лентоЧНЬlЙ преобразователь, изображеННЬiй на рис.1.3,б, но с вертикальным
расположением
магнита
ЦредпочтителънОСIЪ
~ечения
такого
10
и
поmосн:ых
расположения
сим.метричности
наконечников
дшсrуется
расположения
9.
необходнмОСIЪю
элемевтов
КОНС1р)1ЩИИ
92
относительно
ленточки,
так
как
любая
аСI'Iмметрия
в
реализации
достуmюсти двух сторон ленточки приведет к несимметричности ХН,
которая в идеале должна иметь форму восьмерки в полярных координатах
(см . раздел
2.3.2 и рис. 2.5, а
Помимо
выпоJПIЯет
функции
роль
колеблющейся
электрическое
Rл =0,2 + 0,5
и
приемного
провода
в
2.6).
юпушкн
магниrном
сопротивление
Ом).
акустического
поле .
R,
элемента,
динамического
Вследствие
ленточки
крайне
ленточка
преобразователя,
малых
размеров
певелико
(обычно
По этой же причине малы величины
коэффициента
электромеханической связи В/ ленточного преобразователя и напряжения,
снимаемого с оо концов (порядка
1О-50 мкВ!Па).
Такое напряжение соизмеримо с напряжением помех, наводимых на
микрофонные линии (см.§
корпусе
ЛМ
2.7). Для
устанавливается
которого снимают наriряжение
при этом увеличивается до
увеличения уровня полезного сигнала в
повышающий
1,0 +2,0
200 +300
трансформатор,
с
выхода
мВ/Па. Выходное сопротнвлеnие
Ом.
Основным иреимуществом ЛМ перед катушечНЪiми является очень
малая величина переходных искажений, субъективно оцениваемая, как
мягкость и естествеmiостъ передачи тембра музыкальных инструментов
среднего
и
высокого
регистров
звучания
-
струнных,
тарелок
Причиной незначителъности переходных искажений является
и
др .
малая масса
ленточки, что существенно уменьшает значимость инерционного имиедапса
подвижного элемента (в сравнении с активными соrqхmmлениями) до
самых высоких частот.
Вместе с тем ЛМ (в сравнении с ОДМ) присущ ряд эксплуатационных
недостэ:гков :
а) больпlие габарtПЬI и !tacca, обусловлеННЪiе сравнительно большими
размерами постоянного '1ilarИirra а трансформатора;
93
б) малая устойчивость к вибрационным и ветровым помехам (из-за
неnрочности и малой жесткости ленточки, приводящих иногда к выходу
ЛМ из строя) .
Изготовление ЛМ связано с технологическими сложностями, приводящими
к сравнительно высокой стоимости его производства.
Рис .
2.15. Полная электрическая эквивалентная схема ленточного
На рис .
микрофона.
2 .15 nриведена полная эквивалентная схема симметричного Jllvl,
пригодная для анализа свойств его АМС при осевых направлениях падения
волны (В = 0° и 180°). В схеме приняты следующие обозначения:
т,, с.1
-
эквивален11:1ая масса и гибкость ленточки;
r, = r8н - активное соnротиВJ!ение ленточки, обусловленное потерями на
электрической стороне и вычисляемое по формуле, аналогичной
m2 ,r2
-масса и трение воздуха в зазорах между лентоЧI<ой
наконечниками
7110
9 (см.
8
(2.47);
и полюсными
рис.l.З,б) ;
r, - масса воздуха, соколеблющегося с дентоЧI<ой (с двух сторон), и её
активное сопротИ1111t:ние излучения
( на схеме разделены на две половинки);
с 8 -гибкость воздуха в полости перед ленточкой и за ней (в расчете па одну
сторону) .
Как ви.цно из схемы, цепь зазора m 2 r2 шунтирует параметры ленточки,
что Приводит к уменьшению .скорости её колебаний
эффективности
преобразования.
Поэтому
;·,,
следует
т.е . снижению
принимать
94
конструктивные меры по уменьшению этого зазора, не допуская вместе с
тем касания ленrочкой полюсных наконечников.
Системный анализ и основные управляющие элементы
2.6.2.
В соответствии с функционально-сиСтемными представлениями (см .
и рис.
2.1
§ 2.1)
можем представиrъ последовательность преобразований сигнала в
ЛМ в виде нижеследующей цепочки подсистем:
-
акустическая
подсистема,
представляемая
произведением
диф~~ониой D и анrениой У функций и ruющади ленrочки S.:
F
.
-=D
·S• · air d · cos(J ,
р
(см.§ 2 . 1и
-
тd
=d lc 0 •
· механическая подсистема
,;, = F
где
2.3), где
z,. = r1 + 1'(arn, - - 1 )
r.""r
1
вн
шс,
коэффициенr
п.
В ' · t~
= ---~
R. +R. tn;
трансформации
электрического
трансформатора;
электрическая
подсистема или коэффициенr передачи
цепи :
R'н =Rн1
п.
-
электромеханическая подсистема или КЭМС :
Перемножая приведеиные характеристики подсистем, получим
95
(2 .64,а)
Частотную
зависимость
харакrеристикой
сооrветствующей
z, подвижной
чувствительности,
обусловленную
wr 4 антениы, можно скомпенсировюъ только подбором
частотной завиенмости механического сопротивления
системы, так как все остальные величины от частоты не
зависят. Очевидно, требуемая зависимость (пропорционалъность частоте)
получается
при
z,
"' jшт 1 ,
т . е.
когда
ленточка
"работает"
в
режиме
управления своей массой т 1 , реализующемся в частотной области ш ~ ш 11
(резонансной частоты ленточки). Тогда
.
Е=
Помимо условия ш ~ ш 11
(
S
Вl'
л
· ш-rdcosB л
~
·
1'l
R:.
(2.64,6)
э н
Rл +Кн
которое реализуется, когда
,
нижней частоте диапазона), должно быть обеспечено также выполнение
ограничения по активному сопротивленшо
т.к.
в противном случае компенсация частотной зависимости антенной
функции будет неполной .
Реализации первого условия препятствует стремление уменъшюъ по воз­
можности массу ленточки
чувствительность JIМ.
т, , т.к., согласно
(2.64,6),
при_ этом повьппается
По этой причине для понижения резонансной
частоты ленточки ш 11 стараются увелв;чить mбкость с1 пуrем гофрировки её
концов
вблизи
закреплений
(r.o
избежание
средняя часть ленточки не гофрируется).
несинфазности
колебаний
96
Второе
требование
обеспечивается
либо
подбором
коэффициента
трансформации п, из условия
или увеличением
Rн .
Влияние
элементов
и
rc
т. ,
обозначающих
параметры сопротивления излучения ленточки, проявлЯется лишь в области
самых
высоких
частот
и
на
формировании
ЧХЧ
и
ХН
ленточного
микрофона практически не сказывается.
В целом в ЛМ удается получить в широком диапазоне довольно ровную
и плавную частОТНУJ? характеристику и хорошую "восьмерку" ХН
перепадом 0° -90° около
2. 7.
20-25
(
с
дБ) .
Шумы и помехи в микрофонах и способы их снижения
2. 7.1.
Классификация микрофонных шумов
Микрофон является начальным звеном полного звукового тракта (ЗТ),
создающим
значение
первичный
такого
полезный
сигнала
электрический
определяется
сигнал.
совокупным
Минимальное
уровнем
шумов,
возникающих в устройствах, входящих в ЗТ, и заглушающих полезный
сигнал малого уровня. Соотношение "сигнал-шум" всего ЗТ определяется,
по существу, отношением чувствительности МФ, т.е. нормированного по
звуковому
давлению
полезного
сигнала
от
одного
лишь
пачального
:шеме1па, к суммарному шумовому сигналу от всех :шемептоn ЗТ вюпочая
микрофон .
97
По меС'I)' возникновения микрофоННЪiе шумы раздетпот на внутренние,
наводимые
и
внешние .
Последине
два
вида
шумов
называют
иногда
помехами .
Внутренними
происхождения,
называют
шумы
возникающие
в
молекулярного
капсюле
или
и
элекчюиного
элеменrах
электрИ'Iеской
схемы мmсрофона В результате флюктуаций МОЛекул (например, В ТОНIСОМ
слое
воздуха
ме~
преобразоваrеля)
интегральных
и
мембраной
электронов
схемах,
а
и
элекчюдом
электрического
в резисторах, лампах, ч>аизисторах
также
вследствие
пульсаций
и
выпрям:леННЬIХ
напряжений, ПОС1)'ПЗЮЩИХ от электропитающих УС'IJ>ОЙСТВ .
В
совокупности
эти
шумы
принято
называть также
собственными
шумами мmсрофона.
Наводимыми называют шумовые сигналы, наводимые на микрофоННЪiе
цепи
элеюрИ'Iески:ми
и
магнитными
полями,
проводкн силовой электросети (частоты
усчюйствами
и
цепя:ми
созд~мыми
J1ИНИJ(МИ
50 Гц и её гармоНИIСИ), а также
электропитающих
УС'IJ>ОЙСТВ
(1 00
Гц) .
Электростатические помехи мoryr возв:шсать также при случайных резких
смещенияХ мmqюфоННЬIХ кабелей,
Внешними ЯВЛJIЮТСЯ шумы и помехи, не связанные непосредс-mеиио с
микрофонными элеменrами и цеПями, т.е. возникающие вне звукового
тракта.
К
ним:
отнощrгся
акустические
шумы,
т.е.
шумовой
фон,
создаваемый в зоне расположения микрофона постороиии:ми источникамИ
звука (ч>анспортом, голосами, прироДНЪIМИ источншсами и т.п.) . Внепmие
шумы мoryr иметь аэродUнамическое происхождение, т.е. возНИkаrь при
обтекании корпуса МФ
С'IJ>УЯМИ
воздуха от порывов ветра, дыхания
исполнителя и др.
Наконец,
возникающие
к
внеmви:м
при
же
вибрациях
приЧинами (вибрации
шумам:
и
ч>яске
относят
разнообразные
корпуса,
помехи,
вызываемых разными
перекрьпий, на которых устанавливаются стойки
98
микрофонов , движение исполнителя вместе с МФ и т . п . ) . Более детально
эти виды помех рассмотрены в последующих разделах.
Внутренние или собственные шумы
2.7.2.
Под
.
этим
названием
объединяется
совокупность
электрических
сИгналов, существующих на выходе микрофона при отсуrствии внешних
~
·,
воздействий
шумы
звукового давления, ударов, встрясок и т.п. Вызываются эти
-
тепчовыми
составляющих
флюктуационными
электрических
процессами
сопротивлений,
в
активных
дробовым
:Jффекто.м
транзисторов, микросхем и ламп, используемых в микрофонных цепях (или
их электрических подсистемах) .
В
структуре
электронные
и
электрической
элементы
цепи
отсутствуют.
динамических
Поэтому
возникают в основном в активном сопротивлении
Вопрос
о
тепловых
шумах
сопротивлений
микрофонов
собственные
R.
шумы
звуковой катушки .
достаточно
подробно
рассматривается в курсах по теории электрических цеnей. Заимствованная
оттуда формула
[1]
для расчета ЭДС е"' собственного шума сопротивления
заданной величины в полосе частот от fн до fв имеет вид
е"' =~4kTO . Uв - fн). R.
Здесь Т
0
-
абсошотная температура сопротивления в градусах Кельвина,
k=1,37·10- Дж/град 23
г_.j
(2.65)
kT 0 = !,2J · 10
10
постоянная
Больцмана.
При
темnературе
Дж, так ЧТО ДЛЯ ОбЫЧНЫХ КОМНаТНЫХ усЛОВИЙ
23 ° С
99
е ш =127·10
- 10
~
·JU: - • ) · R
в
./н
к.
' (2 .66)
•
Величина эта для динамических микрофонов очень мала. Гораздо
большее значение она имеет в цепях электростатических преобразователей
(в конденсаторных и электретных микрофонах}, в которых на её величину
влияет также и емкость преобразователя С0 . В таких преобразователях еш
можно вычислить приближенно
(1}
по формуле
(2.67)
Величину
eru
обычно задают не в
sольтах, а нормируют уровнем
эквивалентного звукового давления Nш, определяемым как (см . разд. 2.2.2)
2.7.3.
Наводимые
wумьt
К этому виду относятся шумы, наводимые на элементы микрофонных
конструкций .и их цепей внеiiПiими элеюрическимн и электромагнитными
полями. Поскольку источники этих полей_ находятся вне микрофона, то
шумы наводимого типа на3ывают помехаци.
Электромагнитные помехи проявляются в виде "фона", т. е . НЧ гудения
с частотами сетевого напряжения {50Гц) или пульсаций напряжения цепей
питания выпрямленным током (IООГц или ЗООГц) . Электромагнитные поля
изводят
напряжение
помех
на
элементы
конструкции
микрофона,
содержаmие стальные детали, входящие в микрофонную цепь. Чаще всего
это
. выходные
трансформаторы
конденсаторных
и
дИНамических
100
микрофонов
и
магнитные
цепи
способств)ЪО~е
последних,
сосредоточенню поля помех в зоне расположения катушки или ленточки .
Источниками подобных наводок являются кабели мощных сценических
светильников,
прожекторов,
а
также
их
питающих
усчюйств .
Часто
элеКтромагнитные наводки возникают при прокладке микрофонного кабеля
иблизи от силового и параллельне eld)'. ·
Борьба
с
электромагнитными
наводками
осуществляется
защитой
звуковых трансформаторов электромагнmными экранами, изготовленными
из
магнито-мяrких
материалов
малоугл~дистой
-
стали
(железа),
пермаллоя и др. В ксnушечных динамических микрофонах с этой же целью
применяются так называемые антифоновые ксnушки, наматываемые на
корпус
капсюля.
Индуктивность
такой
~rушки
выбирается
равной
индуkТИВНОСТИ ЗК, но намотка производится в обратном направлении (с
целью компенсации поля, наводящего помеху на ЗК).
Электростатические
помехи
проявляются,
так
электромагнитные, в виде "фона" перемениого тока частотой
в
виде
щелчков,
шорохов
и
других
звуков,
же
50
возникающих
как и
Гд, а также
при
резком
перемещении микрофона или его кабеля. Механизм элеiqростатических
наводок имеет совершенно иной харакrер, чем магнитных, В связи с этим и
борьба с ними осуществляется иными средствами. Дело в том, что ЭДС
магнитной
помехи
индуктируются
в
ксnушках
микрофонной
цепи
(звуковой ксnушке, ленточке, обмотках трансфор:маrоров) пере:менными
:магнитными
возникает
в
полями,
в
результаrе
то
время как ЭДС
непосредственной
электростатических помех
перед(IЧи
части
сетевого
напряжения в микрофоНН)ЪО цепь через емкостной делитель напряжения с
коэффициентом передачи
К=_!;_.., с.
с. +С.
с.
101
Здесь С"- паразитны:е емкости соответственно между активными (не
заземленными) проводниками сетевой и микрофонной линий, С" - емкость
между незаземлеННЪIМ проводом микрофонной линии и землей (рис .2.16,а).
Защита от электростатических помех производится пуrем комбинации
двух
симметрирования
методов
микрофонных
цепей
и
их
электростатической экранировки .
Симметрирование осуществляется пуrем переноса точки заземления с
одного из проводов микрофонной линии на её середину пуrем вынесения на
отдельную клемму средней точки 1рансформатора (рис.2.16,6, спр~а) или
созданием
искусственной
средней
точки
с
помощью
двух
активнЫх
сопротивлений (рис.2 . 16,6, слева) . В такой схеме ЭДС сети (и других
элеК'IрОСТатических помех) передается симметрично на две половники цепи
противофазно, в результате чего происходиr взаимная компенсация помех.
Элекrростатическая
экранировка
реализуется
с
помощью
"чулка''
из
mбкой металлической оплетки, обязательно заземляемой (рис . 2.16,в).
О. о/зс
--=-r-тl--:=C=-n--::,...":u-cпь сш
_ _=_._т=~с____з
i>
--
Рис.
2.16,t. Иллюстрации,
пояСНJПОщие механизмы наведения электростатических помех
oi сети и защJПЫ от них иmсрофонных цепей: а· схема наведения ,
Металл, используемый для металлической оплетки, может не обладать
ферромагнитными
свойствами,
так
как
элеюрического поля помех, а "отведение
его
"
задача
не
"затягнвание"
обкладки паразитной емкости
102
Сп сетевой проводки от активного провода микрофошюй линии на "земто"
(это и решается с помощью заземления ометки) .
Рис.
2.16, б,
в.
Иллюстрации, поясняющие механизмы наведения электростатичещсих
помех От сети и защиты от них микрофонных цепей:
t):-защиrа методом снмме1рирования михрофонной лнннн; в-универсальная
"фанrомная" линия с комбинированной защитой методами симме1рирования и
электрической экранировки .
Практически оба ЭТИ)( метода используются в сочетании, причем ометка
экрана использ~ется в качестве "земляного" провода
( см.
рис.2 .16,в).
На рис. · 2.16,в nриведена принципиальная схема так называемой
стандарmой фатомной линии, позволяющей с помощью двух проводов
(1
и ~ · на· рис . .2 . 16,в) осуществлять., помимо· передачи микрофонного сигнала,
подачу на капсюль микрофона питающего нiшряжения (через два активных
провода подачей"+" в среднюю точку сопротивлений ~ и "-" на ометку
экрана), необходимого для работы конденсщ-орных микрофонов. Благодаря
такому стандарmому кабелю большинство производителей микрофонов
пересгало коммектовать производимые ими микрофоны блоками пиrания .
103
2.7.4.
Внеmние шумы
Акустический
шум
создается
источниками,
присуrствие
которых
в
первичном звуковом поле по разным причинам является неизбежным.. К
ним относятся кино- и виде<>еъемоЧНЪiе камеры, силовое и вентиляционное
оборудование, люди, присуrствующие при съемке
или передаче, и т.д.
Находясь в разных местах помещения, источники шума создают в нем
диффузное
поле, в котором, в результате произвольности размещения
источников
шума
-и
многократности
отражений
звуков
от
разных
поверхностей, ориентаЦ:Ия звуковЫх вОли имеет хаотичный характер, без ·
преобладания КЗJ(DГD-ЛИбо из направлений. Энергия шума распределяется
равномерно,
без сосредоточения ·в
каких- либо местах.
Источник же
полезного сигнала находится в одной или нескольких точках, что позволяет
использовать
определенные
приемы
расположения
микрофонов
для
повьппения уровня этого сигнала в сравнен.ии с уровнем проникающегQ в
юuщл шума. К такИм ПJ>Иемам относится прежде всего возможно более
близкое
расположение
микрофона
к
источнику
передаваемого
звука.
Однако этот эффективный прием не всегда может быть использован; т.к.
очень часто ему мешает нежелаrельность попадания микрофона в кадр
киносъемки или видеопередачи. Другой прием
и
остронаправленных
~икрофонов,
оси
-
.
ХН
применение направленных
.
которых
доЛЖНЬI
быть
сориенrиро- в сторону источника поЛезного звукk. В этом случае
основной источник звука оказывает прямое воздействие на микрофон, а
диффузное поле
окружающего
шумовых источников действует только из той части
пространства,
которая
попадает
в
соответствии с его коэффициентом направленности
пределы
n ).
ХН (т.е.
в
Кроме того, ось
направленности МФ может быть сориентирована так, чтобы направление
104
его минимальной чувствительности совпало с направлением на ближайшие
и наиболее инrенсивные истоЧНИЮI помех.
Аэродинамические
шумы
-
это
внешние
помехи,
образующиеся
ВСледствие обтекания корпуса микрофона квазистационарными потоками
воздуха, возникающими по разным причинам : из-за резкого перемещения
микрофона, ветра, дыхания оратора или вокалиста, воздуmных потоков при
произнесении
взрывных
и
фрикативных
согласны:х
и
т.п.
Скорость
воздуmного потока распределяется неравномерно по поверхности обтекания
и, в соответствии с законом Бернулли, при этом изменяется и давление на
величину
bl' =A(U,f) · Рd (9cos 2 8 - 4)
1 -~
Здесь
(2.68)
постоянная, зависящая от средней скорости воздушного
A(U/) -
3
потока и частоты (приблизителъно обратно qропорционально
f
2 ),
. Рcr - атмосферное статическое давление воздуха, 8 - угол, отсчитываемый
от оси симметрии препятствия, наПравленной на~т~чу потоку. Из
видно, · что максимальное изменение давления Ы' происходит при
8 = 90°.
Это
изменение
давления
вызывает
колебания
(2.68)
8 = о• и
диафрагмы
и
"-
появление соответствующих напряжений помех на выходе МФ .
, . . , · . Защитой от этого вида помех, которые называют также ветровым или
''рор-зффе:ктом"'
е'ветрозащиты''),
многослойные
· , дающие
служат
противоветровые
ИЗГОТОВЛеННЬlе
металлические
ИЗ
сетки,
сферические
1равл8НОГО
рассекающие
ему возможности действовать
ПОрОЛОНа,
экраны
а
также
поток воздуха и не
непосредственно
на ;ZtИафраrму.
Эффекtивность действия сферического пористого экрана повышается с
увеличением объема сферы
.
Он способен обеспечиrь снижение уровня
аэродинамического шума приблизителъно на
6-12 дБ [ 1].
105
Подбор
оптимальнъrх
параме1ров
ветрозащитных
устройств
представляет собой непростую задачу, так :как эти устройства оказ:ывают
существенное влияние на ЧХЧ н ХН микрофона в области высоких частот,
причем увеличение степени закрытости (плотности поролоновых стенок
сферической
полости)
Положительное
влияние
повыmает
на
степень
ветрозаiЦИiу
искажения
характеристик.
оказывает также
увеличение
размеров пористого сферического эхрана. Однако в пракппсе примене:ние
таких экранов крайне .неудобно, а иногда и просто невозможн(). Следует
отметить также, что пенаправленные
преобразователя,
существеmю
аэродинамических помех в
микрофоны, независимо от тищ1
меньше
подвержены
ВJ111J1НЩ0
силу бощ.mей ВеJIИЧИIЩ щ м-~ханичеркоrо
импеданса. Поэтому в условрях уЛИЦЬI (ИаJЧ>ИМер, при тел~- и радио­
репортажах)
лучше
использовать
иенаправленные
динШiические
микрофоны .
Вибрационный и структурный шумы обусловлены низкочастотными
механическими колебаниями, действующими через элемеКIЪI конструкции
МФ· на капсюЛь, а затем, через упругий подвес и элементы акустико­
механической системы, на подвижный элемент.
Вибрационный
шум
возннкает
из-за механических
колебаний
опор
(пола, стола, стойки), тряски микрофона в руках нсполmrrеля, случайнъrх
ударов и толчков микрофонных стое:к, колебаний подиумов, трибун и т.п.
Вибрационные помехи характерны также для МФ, передвигаемых вслед за
исполннтелями ("накаты" кипо-и видеокамер).
Структурный шум возникает · вследствие трения МФ об одежду (в
"петличных" МФ) и сжимания МФ в руках (в "ручных" МФ). Отличается он
от вибрационного тем, что передача механических колебаний происходит
по твердому телу (оболочке корпуса и капсюля МФ) к чувствительному
элементу. Он характерен :как для динамических, так и ковденсаторНЬIХ МФ.
Защита от него осуществляется путем разделения металлических оболочек
106
корпуса
и
капсюля
резиновыми
акустическими сопротивлениями
уменьшению
уменьшение
покрытий .
этих
помех
его
защиты
полимерными
прокладками
с
сильно отличающимися от металла. К
приводит
шероховатости
Механизм
,
или
также
увеличение
поверхности
и
толщины
применение
корпуса,
специальных
от вибрационной помехи рассмотрен
на
примере применени~ внутреннего. амортизатора ручного микрофона. В
конструкции такого микрофона используется упругая изоляция капсюля от
корпуса МФ (рис. 2.17,а) . Принцип действия такого амортизатора можно
пояснить с помощью динамической модели, приведеиной на рис . 2.17 , б .
!J
f!J
~~
тк
--~~~
.~
"
\..
Рис.
2.17.
Защига микрофона от вибрационных помех: а· - схематичесk8Я конструкция
IСаПсюля и защ~m~оrо устройсгва;
Величина
паразитного
6- динамичесiСаЯ модель защ~m~ой системы; в-её ЭЭС
электрического
действием вибрационной сИЛЪI
системы (массы
m,
·.
Fвв ,
сигнала,
oбycJюWieннoru
определяется смещением подвижной
на рис.2.17 ,а, б) по
отношению к капсюmо (масре т.).
107
Если гибкость с, подвески массой т, (т. е. воротника диафрагмы) достаточно
мала; ' так что в частотном диапазоне действия вибросилы обеспечивается
условие nревышения упругого сопротивления
то массы
т,
и
т.
1/ CtJC,
над инерционным
OJm, ,
будут перемещаться практически синфазно и с
одинаковой скоростью . Это означает, что разностная скорость
(,;.- .;,)
будет мала и сигнал вибрационной помехи-незначителен (рис.2 . 17,в) . В
противоположном случае, т. е . когда
10011
упругое
не
сопротивление
подвески
> 11CtJC, (или w > w11
препятствует
=
11~w,c,
),
относительному
смещению масс т, и т" разностная скорость будет близка к вибрационной
скорости ; • и' сигнал вибропомехи достигнет наибольшего значения.
Таким образом, величина сигнала помехи определяетсЯ положением на
частотной шкале частоты
w11
резонанса ПС:
при НЧ резонансе (как в
динамических микрофонах) сигнал вибропомехи возрастает, при высоком
(как в КМ)
-
снижается. Поскольку положение частоты
w11 зависит от
принцила действия МФ, то борьба с вибрационными помехами путем
изменения частоты
w11
фактически не может быть реализована.
Другая возможностr. заключается в том, чтобы добиться уменьшения
вибрационной скорости самого сигнала ~ . (см. рис. 2.17,в), т.е. ослабить
· каким-то образом
на
передачу
капсюль, т.е. массу
т
вибраций корпуса
микрофона
(массы М)
•.
Это достигается устранением жесткого соединения корпуса с капсюлем
путем их разъединения гибкими прокладками, совокупный коэффициент
гибкости которых
сА (гибкость
амортизатора)
следует подобрать
так,
чтобы (в отличие от предыдущего случая) обеспечить как можно более
низкую частоту амортизации, т . е.
r
'
108
При этом в частотной обласm Ф > Ф А вибрации корпуса будуг nередаваться
на массу каnсюля (а следовательно, и на ПС) существенно ослабленными .
Более nодробные сведения о механизмах действия вибраций на МФ и
nринциnах защиты от них можно прочитать в
2.8.
[1]
(стр .
36 и 339).
Вопросы и задачи по микрофонам (МФ)
Общие вопросы по микрофонам _
2.8.1.
(2) Что
такое микрофон? Какова фунi<ционалъно-системная струкrура
микрофона?
2.
Что
такое
чувствительность
чувствительности (ЧХЧ)
?
микрофона?
Частотная
характеристика
За счет каких функциональны х звеньев она
формируется?
Q
Каковы основные классификационные nризнаки микрофона? Что такое
11
характерисmки наnравленносm (ХН)? Какие ХН бывают у МФ?
4.
Какие
тиn:ы
nреобразователей
nрименяются
в
профессиональных
микрофонах? В чем основные отличия этих nреобразователей?
(9 Какие
тиnы приемных антенн вы знаете? Какие ХН они реализуют?
Перечислите основные параметры nриёмнъiх антенн и поясните, какие
характеристики оnределяются этими параметрами?
6.
Какое явление имеет место в диаnазоне самых ·высоких частот при
взаимодействии поля звуковой волны с корпусом микрофона? Как это
отражается на его ХН?
109
~акие характеристики ~нов изме~ в бЛЕDКНем поле
источника
звука?
На
ICaiCИX,
nримерно,
часrотах
и
ка.ких
тиnах
микрофонов эти изменения наиболее заметны? Почему это nроисходит?
8.
Перечислите
и
обоснуйте,
какие
эцеiсrрОакустические
параметры
микрофонов оnределяют nравильиость передачи ими спектра полезного
сигнала и его динамического диаnазона?
G)перечислите и поясните, какие электрические параметры микрофонов
определяют сооnюшение "полезНЪIЙ сигнал
входе звукового тракта, а какие- "сигнал
10. Перечислите
разновидности ;- шумов
-
акустический шум" .на
,
- шум" в самом тракте?
в
микрофонах?
Как
они
хлассифицируются?
@:о такое внуrренние и наводимые шумы? Какие они быва:ют? I<а,ковЬ!- •
способы их снижения?
12.
Что
такое
акустический
и
аэродинамический
mум~~~ в
микрофонах?
Оnишите способы снижения их ВJ1ИЯ1Ц1Я .
Vто такое вибрациоННЬIЙ и стр~ный шум? Сопоставьте качещвешю
степень его влияния на различные ТИПЬ1 ~нов. Каковы способы
борьбы с этими тиnами помех в микрофонах различиого назначения?
14. Что
такое
оnорНЪIЙ
диаnазон
(зона)
частот?
Какие
параметры
и
характеристики можно считать посто~-ми в опорной зоне? Чем этот
диапазон ограничивается снизу и сверху?
2.8.2 .
Задача
Три источника звука, ИЗ-1, ИЗ-2 и ИЗ-3, создаюг на расстоянии lм по оси
от излучающей поверхности звуковые давления, соответственно р 1 , р 2 и Рз
•
110
ДавлеiШ.е р, ухазано в таблице к данной задаче.
Рз=
Известно, что р 2 =
2 р1
,
..fi · Р2 ·
Одним микрофоном с заданпой в таблице чувствителънОС1ЫО Е и типом
характеристики направленности
R(8)
надо записать звучание одвовремешю
всех трех источников, расставив их вокруг микрофона так, чтобы:
а) электрический сигнал от каждого источинка па выходе мmсрофона был
одной и той же величины;
б)
динамический диапазон
(ДД)
суммарпого сигнала был как можно
?о~mим ори выпоJПJепии условий, что расстоЯПИSI от каждого источинка до
микрофона .и между соседними Источинками не должны быть меньше lм .
Известно, ч.то уровень диффузного акустического шума в помещении,
где производится запись, составляет
элеюрического
5,08-10
1
шума
тракта,
N",
= 40дБ , а наоряжеiШе собственного
ориведенпое
к
его
входу,
равно
В (5,08 мкВ).
ПрИПЯТ}'Ю расстановку источников показа:rъ в масштабе па рисунке.
Определить:
а) динамический диапазон записанного суммарпого сигнала, имея в виду,
что его пик-факторсоставляет
10 дБ;
б) тип шума (акустического или элеюричесi<ого), определяющего 1Ш.ЖНИЙ
уровеньДД.
Пояснить, как следует .вычислять суммарный сигнал:
l 1l
Таблицы
для выбора параметров к задаче
мВ
Чувствительность Е,
~
Па
~
1
2
3
4
о
1
1,2
1,4
1,6
1,8
1
2,0
2,2
2,4
2,5
3,0
2
5
6
7
8
9
3
10
11
12
14
15
4
16
17
18
19
20
п
характеристики
шифру)
Звуковое давлениер,Да
-
о
Тип
2.8.2 (по инд.
направлен-
о
1
2
3
4
о
0,2
0,3
0,4
0,5
0,6
1
0,25 0,4
0,6
0,8
1,0
2
0,3
0,5
0,6
0,9
1,2
3
0,4
0,6
0,7
1,0
1,4
4
1,0
1,2
. 1,4 . 1,6
2,0
н о сти
Обозначения: ·
~
о
1
2
3
4
Характеристики направленности
Jlli -ненаправленная ("круг''),
о
I:ffi
к
в
гк
IOl
К
-
кардиоида,
1
к
в
гк
I:ffi
к
В
-
восьмерка,
2
в
гк
IOl
к
в
ГК
3
гк
Iffi
к
гк
Iffi
4
нн
к
гк
I:ffi
к
2.8.3.
1.
R(B):
-
mперкардиоида.
Вопросы по динамическим микрофонам
Как устроен ненаправлеННЬiй
динамический микрофон
(НН,ЦМ)?
Какова его динамическая модель и эквивалентная электрическая схема
(ЭЭС)?
Поясните
требуемой ЧХЧ.
способы
подбора
его
параметров
для
обеспечения
112
Как . устроен
2.
''восьмерки"?
лентоЧНЬIЙ
Какова
его
динамwiеский
эквиваленrная
микрофон
схема?
с
ХН
Поясните
в
виде
способы
согласования его параме-хров с требуемой Ч:ХЧ.
@
Как устроен однонаправленный динамический микрофон (ОДМ)?
Какова его ЭЭС? В чем состоит
определяются
его
параметры
его главное отличие от ННДМ?
.для
реализации
кардиоидной
Как
ХН
и
равномерной Ч:ХЧ в опорной зоне? Какие конкрепю тиnы ХН вы знаете?
За счет каких акустико-механических и конструктивных параметров
4.
можно изменять ХН динамического микрофона? Как это сделать?
,.
За счет каких акустико-механических
5.
Ч:ХЧ
ОДМ?
Влияют
ли
такие
элементов можно изменить
изменения
(и
каким
образом)
на
чувствительность?
6.
счет каких акустико-механических элементов можно изменять
Ja
тенденцшо Ч:ХЧ ОДМ? Скажугся ли такие изменения и каким образом на
ХН и чувствительности микрофона?
2.8.4.
Задача
ОДМ с кардиоидной ХН, расположенный в поле плоской волны, имеет в
режиме
холостого
частоты: резонанса
хода
/ 11
плоскую
частотную
начиная
с
подвижной системы (ПС). Известны следующие его
параметры: масса ПС m1 =
20
мг; радиусы Ь
диафрагмы, соответственно, Ь =5 мм
геометрической базы
характеристику
d = 17 мм;
,
а =
КЭМС -В/ =
10
-
звуковой юriyiiii(И и а
-
мм; размер (эффективный)
4,3
Тл·м .
По выбранному из прялагаемой таблицы значению
/ 11
и данным задачи
определить:
а) активную соС1'аJЩЯI()щую механического · сопротивления
rL "'r1 + r2
и
113
б) чувствительность Ео•
в оnорной зоне в режиме холостого хода,
принимая эффекrивную nлощадь диафрагмы равной
в) амплитуду смещения
уровне
звукового
давления
4..
S 1 =~(а + Ь )
звуковой ка'I)'шки на частоте
дБ
N_=140
(не
забываем,
f
2
;
= /
что
11
при
уровень
определяется по действующему значению, а не амnлн'I)'де давления) .
Рассчитать и построить график ЧХЧ микрофона при его помещении в
поле плоской волны (дальнее поле) и в ближнем поле, на расстоянии
R = 0,1 м
f = / 11
от источiПiка звука, начиная от
и до
f = 1000 Гц,
с треть­
окrавным шагом по стандартным частотам.
Таблица
для выбора резонансной частоты
ПС в J 'ц (по инд. nшфру)
/ 11
~
о
1
2
3
4
о
63,0
66,7
70,7
75,0
80,0
1
84,1
89,1
94,4
100
' 106
2
112
119
125
134
141
3
150
160
168
178
189
4
200
212
224
238
250
Стандартные частоты
(ГОСТ
Гц :
12090-80)
20;25;3 1,5;40;63;80;100;1 25;160;200;250;3 15;400;500;630;800;1000;
кГц : 1,25;1 ,60;2,00;3, 15;4,00;5,00;6,30;8,00; 10,0;12,5; 16,0;20,0;25,0;31 ,5.
114
ЛИТЕРАТУРА
1.
Вахитов Я.Ш. Теоретические основы электроакустики и
электроакустическая anпaparypa- М.: Искусство,
2.
.
1982.
Вахитов Ш.Я. Динамические микрофоны: Монография.
СПб.: Из).(.СПбl 'УКиТ,
3. Вахитов
-
2002.
Ш.Я. Современные микрофоны. Теория,
проектирование: Монография.- СПб.: Изд. СПбГУКиТ,
2003.
115
ПРИЛОЖЕНИЕ
Широкополосни
1.1.
.N'tl (К РАЗДIЩУ 2.5.2)
математическак
модель
частотно-
пространствеиной цраперистики ОДМ
Анализ, проведе:нный в разделах
2.5 .2 - 2.5.5,
носит приближенный
характер, обусловлеiПIЪlЙ тем обстоятельством, что общее выражение для
чувствительности микрофона
(2.8),
получеНiiое на основе
систеМного
анализа, · применимо для ·микрофонов с несколькими входами только в той
часrогной области, где влиянИе дифракционных факторов незВ:ачителъно,
т.е. D ... 1. В области же ВЧ, · где это условие не вЫIIоJШЯется, каждый вход
находится в своих дифракциоННЪIХ условиях: фронтальвый
-
в условиях
прямого ОТражения падающей воЛны, учитываемого коэффициентом DФ ;
боковое отверстие
вход
( если
-
в условиях скользящей волны, ког~а
D ""1 ;
ТЬUiовой
он предусм<nрен) или фронтальный ~и падении волны с ТЬUiа ­
в условиях "теневой" дифракции.
По этой причине испОJIЬЗОвание единого коэффициента дифракции, как
это представлено в формуле
(2.8),
УГУ формулу сопротивление
i
подвижной
системы ,
но
становится некорреК'l'НЪIМ, а входящее в
определяется не только сопротивлением
и
имиедапсами
внуrренней
z1
сq>укrуры,
участвующими также н g формировании антенной функции. Иначе говоря,
раздельное
представление
механической
и
затруднительным.
антенной
подсистем,
выражаемых
характеристика:м:и,
дифракционной,
становится
на
ВЧ
116
Здесь мы проведем более строгий анализ, в котором учтем отмеченвые
факторы, а также влияние сферичности фронта волны (см . раздел
позволит
получить
универсальную
(широкополосную)
2.5.5), что
математическую
модель частотно-пространствеиной характеристики микрофона.
С зтой целью рассмотрим эквивалентную электрическую схему АМС
микрофона, представленную на рис .. 2 . 13,б (см. раздел
опустим
все
IIЛриховые
индексы
параметров (т.е. будем писаrь F 2
на
2.5.1).
обозначениях
вместо F: ,
m2
Сопротивления ветвей схемы обозначим :i I>:i 2 и :i 3
,
Для простОТhl
сил,
скоростей
вместо т;
и т. д .
и
).
так что
)
(П
ОбОзначеНИЯ И СМЫСЛ Параметров
..
'
разделе
2.5.1.
1j , m1 ,
Не забываем, что под r 2
,
m2
С1 ,
72
,
m2
И С2
1.1)
приведеНЫ В
и с 2 предполагаются значения
параметров второго входа, приведенвые к площади диафрагмы.
В
соответствии
с
ЭЭС
(с~.
рис.
2.13,6)
запишем
два уравнения,
составленных по коШурам прохождения коmурных "токов"
~~ и ~ 2 (на
рис. 2.13,6 - ~ 2 , ), физический смысл которых соответственНо - скорость
колебаний диафрагмы · и колебательная скорость воздуха в отверстиях
второго входа, приведеiПiая к площади диафрагмы.
Итак, по первому контуру
(П
1.2)
(П
1.3)
По второму контуру
Из уравнения (П
1.2) имеем
117
Подставив это выражение в (П
1.3), получим
F;
-(1+ : )-F
2
2
'
3.
(П
~1= --· ---
i,
(l+ ::)+Z
1.4)
2
Сила
f; =D1 ·pS1
где р- давление в свободном поле (в точке, где располагается диафрагма
микрофона с площадью S1 ),
D,- дифракционный коэффицненr первого
входа, выражающийся формулой
(2.50) (см. раздел 2.5.2), т.е.
D 1 = 1+ cosO.,J;:::
Сила
F2 ,
действующая
на
второй
вход,
.
т.е.
боковые
отверстия
в
цилиндрической части :корпуса микрофона, при фронтальном и тыловом
наnравлениях падения (о "-' 0°u(J = 180°) формируется волной, "скользящей"
вдоль корпуса. Поэтому D2 (0°)=D2 (180°)= 1. При падении боковой волны
(в= 90°) происходит е(; рассеяние цилиндрической поверхносnю :корпуса.
118
При этом часть отверстий оказывается в зоне рассеяния и примерно столько
же - в области "тени". Поэтому уменьшение · давления в теневой зоне
nокрывается его увеличением с nротивоположной стороны цилиндра и в
среднем,
с
достаточной
nолагать, что
для
ииженерНЪIХ
расчетов
точностью,
можно
D2 (90°)<>:1. Поэтому, приняв в целом D 2 =1 и учтя влияние
сферичности фропrа в соответствии с
[2] и выражением (2 .60), можем
наnисать
F2
S
-е -1=• -е
.
Р' d
""РS,-е -;м, ... в ·(1-d'cose)
1+-cos8
R
Здесь d' = d 1R
- значение базы d, нормированной по расстоянию
R
от
источника звуКа до диафрагмы ОДМ.
Функцию
опережения
запаздывания
при
воздействия
8=180°) мы
волны
представляли
на
ранее
второй
двумя
вход
(JШИ
членами
её
разложения в .ряд Маклорена. Для широкополосной модели необходимо
повысить точносrь её приближенного представления, для чего следует
учесть ещё и третий член ряда, полагая
е
-j=....
в
.
"" 1 -}ШТ
d
·COS 0
(ап- coseY
2
d
-~~--~
(П
1.5)
Оrиошение ~z/ ; 3 представим в развернуrом виде:
(П 1.6)
где
Поставив значения
F;
и F2 , а также (П 1.5) и (П 1.6) в (П 1.4), получим
119
~~
р
=S
1
. Re,+ jlm1
Rez + Jlmz
(П
1.7)
(П
1.8)
(П
1.9)
Здесь
Re z =r1 · 1- -ю 2
(
Im 2
ю
2J + r
22
~
2
+r2 · -
с1
ю11
(1- - -2J
ю
= ю·[т (1-ю 11 2 J·(l-~J
+m
22
1
Ю
2
ю
2
(П
2
+r
2J
·т
rc
1.10)
(Пl.ll)
]
Чувствительность ОДМ можно получить пyrel1 )'МJf()жения (П1 . 7) на КЭМС
(М =Вl) и коэффициент передачи К элеюрической цепи микрофона. Иначе
говоря, с формально-системной позиции выражение (Пl. 7) представляет
собой произведение парциальных характеристик трёх подсистем:
;, =
р
акустической,
Р" · .f_ · f. = D · S · У·:!.
р
р,.
F
1
1
(П1.12)
z
акуС'IИЧеско-механической
и
механической.
Однако
расчленить в общем виде выражение (Пl. 7) по этим признакам не удается.
'
Для отдельных же частотных областей такое разделение получается
автоматически . Например, для НЧ области, определяемой условиями
получаем
120
d
Re 1 "'-·cosB
R
Подсrавив в (П
'
1. 7) , имеем
!!_cosB + Jш(rrc +rd cosB)
;. .
Z!. - S . ~R'------...,.----.,....P - 1
rl + r2 + jш(ml + m2)
(!11.12)
1fГО совпадает с
ПРИЛОЖЕНИЕ
2.1.
.N'! 2
и
(2.57)
1
i
(2.6 1,а) из раздела 2.5 .5.
(к разделам
Вывод соотношения
s .у
2.5.3 - 2.5.5)
для разностной снлы
F,
действующей на
диафрагму ОДМ
Согласно ЭЭС ОДМ
Fз =
2Fz
'
Fz
=F; -e-i<'"• ... e
(1 - ~) + Jшrrc
(/) 21
Используем три члена разложения в ряд Маклорева функции б~~
задержки сигнала
Тогда
121
Приведя к общему знаменателю и сократив взаимно уничтожающие члены,
nолучаем
(П2 . 1)
что совnадает с
(2.57) в тексте.
Очевидно, что оmошение модулей
F
и
F1
(р
2.2)
выражает модуль апrеmюй функции ОДМ.
2.2. Вывод
приближенных соотношений
(2.59)
ДJП( аиrенных фуmщий
ОДМваВЧ
Область высоких частот оnределяем выполнением условий
ш>Ш 22 =11 ~m 2 c 2
li} 2
,
-
li} 2
22
>>1
Кроме того_,предnолагаем, что nараметры второго входа микрофона (масса
m2 и гибкость воздуха внуrрикорпусноrо объема с 2 ) подобраны так, что
вьmо.лняется условие
(2.58):
(П
Тогда можем в ( П 2.1) произвестИ следующие уnрощения:
а) вещественный член чнСJШТеЛЯ
2.3)
122
при 8 = 0°
и
8 = 180° в соответствии с условием (2.58) обращается в
нуль;
б)
при 8 = 90°, когда
u
составляющеп
cos8 =о
,
этот член определяется лишь первой
Шz
-
;
2
Шzz
в) вещественный член знаменателя с учетом условия
(2.59) принимает
вид
Учгя эm упрощения в
( П 2.1 ),
получим:
-для фрешального падения, когда
8 = 0° и cos8 = 1 ,
i(e=oo)= JШ(•" нd) - = Jш(r,. нd)
jйJ"l:,. - ш zт; jйJ"l: "'(1- шzт;
2jйJ"l: rc
2
J
(П
2.4)
1
здесь произведены подстановки :
т,. +тd =_2__=~
т,.
•,.
А
-для флангового падения, когда
8 = 90°
и cosB = о
,
с учетом
( П 2.3 )
(П2.5)
123
-для1ЪШовогопадения,когда
8=180°, cosB=-1, cos 2 8 = 1,
А-В
А-В
ш2т 2
А+ jш'!j_B
1- - -d-
(П2.6)
2
2-jштrc
Здесь знаменатель совпадает с вариантом фронrалъного падения зв)'ка.
2.3.
Вывод выражении
Сила,
(2.61) дли антенной фуНIЩИИ ОДМ на НЧ [2] .
действующая
на
второй
вход,
согласно
(2.60)
выражается
соотношением
-е-i""•"""в
dR
F2 = р2 . S 1 = F1
(П2.7)
R(l+-cбsB)
R
Примем во внимание, что даже при очень малых
R его
величипа больше
так что всегда
d
R
-<1
Поэтому из (П 2.7) получим
и
d
d
""1-ясоsе.
1+ - cosB
R
d,
124
Поскольку
r • = d 1с 0
членами, содер~
d2
-
величина
и
сама по себе малая, то всеми
d 3 , можно пренебречь из-за их малости в
сравнении с членами первого порядка .
Тогда
F 2 = F , ·(1- ;'rur • cosO -!!_
R cos(})
и
F3 ""F2
..
(1- JrurJ,."r;(t- jw(r"' н. cos0)-%cos(})
Здесь также проигнорированы члепы второго порядка малости .
Таким образом
7
·
)
F -F
.
)
d
Y(w,O =-1- -3 =Jw(r,.+r. cos(} +-cos(}
r;
R
ИдИ
(П
2.8)
(П
2.9)
для модуля
,
Y(w,O)=w · (r,. н. ·cosO) +
-
d 2 · cos 2 0
2 2
wR
125
ПРИЛОЖЕНИВ N!!З
Примеры решения задач раздела
1 и 2.
Задача 1.5.2. (условие и численные данные приведены на стр.
Дано:
m=9,0r; Т) =О ,О87; fm=40 Гц; Rx=16
8
d==O,I мм; Рэм.=1,78 · 10" Ом·м.
Определить:
r-?;
Ом;
Lx=2,75
мГн:
34-36.
81=5,25
Вариант
00)
Тл·м;
с-?; f).м.-?; !-?;В-?
Рассчитать: !Zвxl
Решение:
Из условия механического резонанса:
1
, w.ч m=--;
йJмС
1
откуда с=--
2
OJмm
=
1
(2П)
2
40 2 ·9 ·10-3
Находим характеристическое сопротивление (см. формулу
ro=
и
=
9·10-
/1 .22/), затем r
3
1,76·10-3
= 2,26[кгjсек] ;
r==ТJ·ro=2,26 · 0,087= 1,968·1 о·':::::О, 197.
В соответствии с формулой
(1.18), находим f~.м.:
5 25
f = йl,м Bl
= 1,68 ·10 2 Гц=
•
"'" 21!' - 21!'JLкm- 2;r~2,75·10- 3 ·9·10-3
Из формулы
R. =
Рэ.м . ·
Sl = Рэ.м. · 1«i4/
2
1= к
1611' · 01 2 ·10-6
'
4 · 1,76 · 10-8
В=
= 7 47 ·10- 1 :::::О 75[Тл].
R ·1!'d 2
4Рэ ..11 •
В!= 5•25
1 7,06
168Гц.
находим длину провода, затем В:
7,06[м];
'
'
( 1.12) преобразуем к удобному для вычисления виду:
.
(Вl) 2 [r-j(шm-_J_)]
(В/)2
R
. L
шс
lzG.Т 1= R' + jOJLк+
1 = к + JШ к +
2
r+ jOJm+-. r2 +(OJm--1-)
Формулу
jйJC
йJС
Далее, подставив полученные значения, производим вычисления по формулам:
R - R
(вz)zr
. х
(Bl)2 (шm- . :с)
= OJL---->---"'---7
., - к+,'+(шт-~)" "
,'{ш•-:J
Результаты всех вычислений представляем в виде табл.
функции \Zвx(f)\.
1.5.2,
i
а и строим график
126
Задача
1.5.3 (условие и численные значения на стр. 37-40) .
Дано: материал мембраны- сталь, уд. плотность Руд.=8·10 3 кг/м 3 ; д=8мин.;
2
fо 1 =2500Гц; S=100мм ; 8=30мин.; 11=0,707; р=1,0 Па; fн=31,5Гц; f,=2f01 =5000Гц.
Определить: С 0 -?; m3 -?; С 3 -?; U 0 -? (при Свн=2с,);
Рассчитать: Uн(f) (при R;, из(1 ,40) и R;, =0, 1R;, ); дN . дN(f)=201g[Uн(f)!Uн( 1ОООГц)]
По формуле
(1 .3.6)
определяем
С =eoS =8,85·10-12.10-4 =295·10-11Ф=29,5пФ.
о
30·10-6
;;
'
Находим эквивалентную массу мембраны с учетом соколеблющейся массы
воздуха:
т 7 = ~р
·д· S + 2р0 а 3 = ~3 · 8 · 103 • 8 ·10-6 ·10-4 + 2 ·123
· 5 64 3 ·10-9 =
3 м
'
'
= 8,53 · 10- 6 + 0,44 ·10-6 = 8,97 · 10-6 кг ",g · 10-6 кг ,
гдеа-радиус мембраны а=
-v;(S{iQ-4
v---;=
= 5,64·10- м .
3
1
Из усло вия механическо~о резонанса, нахою:[м]
с
'
=--=
=45·10
шi 1 m , (2n) 2 ·2,5 2 ·10 6 ·9·10-6
'
н
;
,. -7с -9·10-4 [м]·
...,fJII
-
__.
Э
Из формулы
Ио =~
Из
fl
-
;;z
с.нСо
( 1.44)
=
с •н
;;
Jс.нСо
;;z
= - 2-
и о со
=
определяем величину
3 · 10з =1,84·102[8]=185[в] .
3·10-5
=
J9 · 10- 4 ·29,5·10- 12
.J9 · 29,5
( 1.40) следует
1
RнСо = Тн =-,откуда можем вычислить Rн:
!н
R:
=
1
·
3 1,5 . 29,5 ·1 о - 12
..
.
=1,076·10 9 0м"'10 9 0м=1г0м;
8
R" = O,lRн = 10 Ом= 0,1г0м .
Характеристическое сопротивление мембраны
ro=
~=
v~
9 · 10-6
4,5 ·10-4
=1,41·10-l[кг '].
сек
Механическое сопротивление потерь (трения) .
[.!5!_] ,
r, = 7J·r0 =0,707·1,41·10- 1 =9,97·10- 2 "'10-1
Находим полный механически~ импеданс
:
сек
127
z=z -z
С
=rЭ
GH
+·[m -9·10_6
}
+;'(mm --1-· ) - -1- = r +;·[mm _ _!:__(с."
Э
_
_1:__
•
OJc,
4 5 10
• ' -
;mc."
Э
Э
OJ
с." ·с.
4
OJ 4,5·10- 4 ·9 · 10-4
-с,)]=10- 1 +
J=10- 1 + ·(m·9·10- 6 }
1
)·
OJ·9·10- 4
Рассчитываем частотную зависимость колебательной скорости мембраны
:
, Рассчитываем ЭДС в соответствии с формулой (1.4 .1) :
и
е= -о-·~
'
jm5
Далее в соответствии с рис. 1.9 рассчитываем
u"(j)
для двух значений
R" (R~uR~) и Ыf(J):
е·Rн
И" (f) = --;=R:=+=(~===1::)=1
шС 1
Заполняем таблицу и строим график.
Задача
(условия и числ . значения на стр.
2.8.2
109-111).
Дано: Р1 1==О,З Па; Р21=2р1; Рз1=J2 Р21 ; Е =1,2 мБ/Па; ХН- кардиоида; Nшa=4Q дБ;
6
Uwз=5,08·10' B; 6.Nn=10 дБ; U1=U2=Uз.
Определить:
-
динамический диапазон
Dg;
тип шума, определяющий нижний уровень
Dg .
При решении этой задачи нужно учесть два важных обстоятельства:
-
уменьшение величины давления от источника звука обратно
-
уменьшение выходного напряжения
пропорционально расстоянию до микрофона (см. раздел
U
2.5 .5
и [1])~
направленного микрофона при
нахождении источника звука вне акустической оси микрофона в
соответствии с его ХН.
Решение:
Определяем величину звукового давления создаваемого каждым (первый индекс)
источником на расстоянии lм (второй индекс).
128
Р2 1 =2р 1 =О,6 Па;
Рз1=J2 pz=0,85 Па.
Величина выходного напряжения, создаваемого микрофоном от единичного
источника, расположенного под углом е от оси микрофона,
Их= Е(ео )· R(B)· Рх 1 _.!._
rx
В соответствии с этим определяем
И 1 = Е(оо )..!.(1 + cosB1)· Р11 -~
U2
;
r1
2
= Е(оо )-~(1+cosB2 ) · Р 21 _.!._ ~
2
U3 =
r2
Е(оо )..!.(1 + соsВз)· р 31 .!_ ·
2
r3
U 1=U 2=U 3, r 1 ~1 . Поскольку источник 1 самый слабый,
его на оси 9 1=0°, r 1= 1.
U1= 1,2·1 о· 3 ·1·0,3 ·1=3 ,6·1 о-4 в.
Пусть 9 2=8 3=60°, тогда U 2 = 1,2·10-3 · -1 (1 +0,5)·0,6_.!_ = 3,6·10- 4 В .
2
rz
По условию
то расположим
Откуда определяем r2 =1,5м.
Аналогичным образом находим r3=2, IЗм.
Находим величину суммарного сигнала:
U3 =
)U12 +UJ +И; = .J3U1 = 1,73 · 3,6·10-4 = 6,23·10- 4 В .
С учетом пик-фактора о,пределяем величину пикового напряжения на выход е :
20lg~=l0; и.
Иr.
=10°· 5
·Иr.
=3,16 ·6,24·10-4
~2·10- 3 8 .
Нах одим уровень электрического шума:
.
и
э)
0
Е\0° р
N, =201g 7.
=20lg
508 ·10-6
'
=40+201g2,12=46,5дБ.
1,2·10-3 · 2 · 10-5
НаХОДИМ уровень акустического шума:
Na = 40 -!O lgQ = 40-4,77 = 35,23дБ,
где Q=З(коэф. направленности для ХН
"кардиоида")
Вывод Nз>Na
·
Находим динамический диапазон:
Dк
и
= 201g-" = 201g
Задача
и,
2·10-3
_ = 40+ 11,9 = 52дБ .
5,08 · 10 6
2.8.4 (условия и численные значения на стр.112-113) .
2
Дано: m 1 =20мг=2·10'5 кг, Ь=5мм=5 · 10'3 м, а=10мм=10' м, В/=4,3 Тл·м, f11=lООГц.
Определить: rr. = r 1 + r 2 -?, Еоп -?, ~(fJ1==IOOГц) -?при N=!40дБ.
129
Рассчитать ЧХЧ при R~ оо и R=O,lм.
Определяем r1: из условия плоской ЧХЧ нач~ая с f 11 .
s
r.
.
'7 = _Е_ = 1 следует r1: = 2~ 1 m 1 =21Z'·100·2·10' =1,26·10" 2 кг/сек.
шт
1
Из формулы /2. 53 /следует, что в плоской звуковой волне для ХН «кардиоида», где
1,c=r1:c, rd
d
=-и численно
'trc='td,
при
k=l(x.x.)
Vo
. Е _ S1 · BL· к (
оп 'гс +
m1
'd cos
е)-
1Z'(a + ь? вz. 2.!!_ !:.(1,5? · 10-4. 4,3 . 2 · 1,7 . I o-z
И0
4
-
4
m1
2·10-
s
340
= 38· 10'3 ~Па
'
Находим максимальное давление при уровне, N=140дБ:
N = 20/g Pmax = 140, откуда Ртах= р 0 ·!0 7 = 2·10'5 ·10 7= 200Па .
Ро
Находим амплитуду смещения на f 11 :
~ =~.л= _f_-J2 ==
'>т
шlzl
<,
Pmax.S12!!_Ji
.
Vo
4
rE
2 25
· J2 · 10- 4 == 3,97 · 10-4
2 · 1,26
== "· •
~(1,5)2 ·10-4 ·2 · 10 2 -2 1•7 ' 10 1,26 · 10- 2
2
м"" 0,4мм .
Из формулыЦ.53/ следует, что в плоской волне (при R-->oo) от f 11 до
ЧХЧ
-fi
340
f= l ОООГц .
E(f) = const.
В сферической волне при R =О;! м и 6
= 0° с учетом форм)rлы (2.61, б) получим
для кардиоиды
По полученной формуле следует рассчитать и nостроить график ЧХЧ.
!30
СОДЕРЖАНИЕ
ОТ АВТОРА
. ... .... .. ..... ... ..... . . . : ... .. . ... .. . .. . .. . .. . .... .... . .. . ......... . .. . . . .. .... 3
1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ . . . .. ... . .. . .. .. .... .. . .. .. . .... . .. 4
l.l.Классификация и общие сведения .... ... .......... . .... .. ... .. .............. .. 4
1.2 . Элеюродинамические преобразователи ............
.. ....................... .8
1.2 .1 . Устройство и коэффициент электромеханической связи ........ . 8
1.2.2. Входное элеюрическое сопротивление электродинамического
преобразователя - двигателя .. . .. . . . . .. . .. . . . . . .. . . . .. . . . . .. . . . . . . . . .. 11
1.2.3. Полное механическое сопротивление электродинамического
преобразователя -генератора ......... .. .. .............. ....... ... ...... 15
1.3 .Магнитные и магнитострикционные преобразователи ... .. .. .. :.. .. . 17
1.3 .1 . Магнитные преобразователи ...... ... ........ .... ...................... 17
1.3.2. Магнитострикционные преобразователи .... ... .. ... ... .. . .. ... . .... 20
1.4 .Электростатические преобразователи ... ............. ...... .. .. ... . ....... . 21
1.4. 1. Преобразователи с внешней поляризацией (конденсаторные) 21
1.4.2. Преобразователи с внутренней поляризацией (эJ1ектретные) ... 26
1.4.3. Пьезоэлектрические преобразователи . . . ... .. . ... ... ... ... . .. ... ... 30
1.5 . Вопросы и задачи по ЭМП .... .. ... ... .... . . .. . ..... . ........ . .... .. ....... .. . 32
1.5 .1. По общим вопросам ..... . ..... . ... ........ . ........... ... . ... .... .. ...... 32
1.5.2. По электродинамическим преобразователям .......... .. ...... .:. 33
1.5.3. По электростатическим и пьезоэлектрическим
преобразователям .. . .. . ... , .. .. . .. . .. . . .. . .. .. . .. . .. . .. . . ..
36
2 . МикРОФОНЫ ЭЛЕКТРОДИНАМИЧЕСКИЕ .. .
2.1. Общие
. . . . . . . .. .. . .
.41
сведения. Функционально-системная структура
микрофона и его чувствительность ........ ....
.. . ....... .. ......... .. .... .. . 41
46
2.2.1. Классификация микрофонов ........ . ...... ..... ... .. .. ... .. . ... .... .. .46
2.2.2. Показатели качества. как критерии выбора микрофонов. ..... 49
2.2.Классификация микрофонов и показатели их качества .. .. . . .. . ......
2.3 . Акустические
антенны
микрофонов:
устройство,
физические
проЦессы, характеристики ..... .... ......... .... .. . .............. .. ... . ......
53
2.3 .1 . Дифракционные коэффициенты и их характеристики .. . ... . . , 53
2.3 .2. Акустические характеристики приёмных антенн с одним и
двумя входами ... .............. . .. ... .. .. . .............................
56
2.4. Ка'I)'Шечные динамические микрофоны пенаправленного приема 6 6
2.4 . 1 .Соrласование
системных
звеньев .
требования к АМС ...........................
Чувствительностьи
.. . .. . .. . ... ... ... ..... . ... 66
2.4.2. Устройство и структура ..... . .............. . ................ .. ...... 68
2.4 .3. Эквивалентная схема. Подбор параметров ........ . ..... ... .... .. .. 70
2.5 .Ка'I)'Шечные
динамические
микрофоны
с
односторонней
направленностью...... . .. ...... .. . .. .......... ...... .... ...... ........ .. .
?5
131
2 .5 .1 . Устройство и эквивалентная схема ... .. ... .... ... .......... .. ... .... 7 5
2.5.2. Комnлексная математическая модель чувствительности и
направленности ОДМ .. ...... . .......... .. ... .. ... . .... .. .. . .. . .. . .... 79
2.5 .3. Характеристики ОДМ в опорной и НЧ областях ЧД .. . ...... 8.2
2.5.4. Частотно-пространствеиные харакrеристики ОДМ в области
высоких частот ..... . ..... . ........ . ...... .... .. .... .... . .. .. ....... . ... .. 8S
2.5.5. ВЛИЯIШе сферичности фронта волны на низких частотах .. .. ... 8?
2 .6.Ленточные
динамические
микрофоны
с
двусторонней
... ... .. . .... 94
2.6.1. Устройство и эквивалентная схема ..... . .... .. ..... . ..... ... ... . . ~ . 9~
2.6.2. Системный анализ и основные упраВJlЯЮщие элементы .. . .... 9'1
2.7. Шумы и nомехи в микрофонах и сnособы их снижения .. . .... .. .... .96
2.7.1. Классификация микрофонных шумов ... .. . .. ... . ... ...... .. ...... 96
2.7.2. Внутренние или собственные шумы .. . ... .. ........ ... .. .. . ... ... 98
2.7.3 . Наводимы.е шумы .. . ........................ .. ...... . ......... .. ....... 99
2.7.4. Внешние шумы . .. ........ . . .. ...... . .................... . . . .. . ...... 103
2.8. Вопросы и задачи по микрофонам . ........... . ..... . .. . ...... .. ... ... 108
2.8.1. Общие вопросы no микрофонам ... .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
2.8.2. Задача ........................ ... ... ... ..... . .. ... ... . ............... .. .. 109
2.8.3. В~просы no динамическим микрофонам ... ..... . .. . ........ ... . 111
2.8.4. Задача .............. . ........... . ... .. ... ... .......... ..... . ............ .11Z
направленностью ....... ....... . ........ .. .... . ............ ......
ЛИТЕРАТУРА
... ... . .. . .. . .. .... ..
.. ... .. .. .. . .. ...... ... ..... .. .. ..... .. .. .. .. . . 11!{
ПРИЛОЖЕНИВ N!! 1. (к разделу 2.5.2} . . . . . . . • .. • . . . . . . . . . . .. HS
ПРИЛОЖЕНИВ N2 2. (к разделам 2.5 .3 - 2.5.5) ... ... ... ...... ... .. . ... ... ......
ПPИЛOЖElllffi
12.0
.N'2 3 ................. . ........... . .... .. ... ...... ......... ..... . ... ... 125
Редактор Н.Н. КАЛИНИНА
Изд. лиц. ИД .Ni! 02558 от
18.08.2000 r.
15.11 .04 г. Формат 60х84 1/16.
Бумага офее'Пiая. Объем 8,5 печ. л. Уч. -изд. л. 8.
Тираж 250 экз. Заказ 323.
Подписано в печать
--- ----------------
Редакционно-издательский отдел СПбГУКиТ.
192102. Санкт-Петербург, ул.
Бухарестская,
22.
Подразделение оперативной полиграфин СПбГУКиТ.
192102. Санкт-Петербург, ул.
Бухарестская,
22.