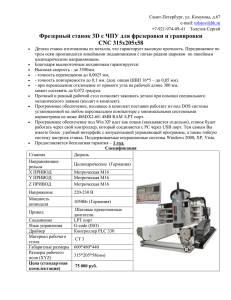
Содержание Введение ................................................................................................................................... 5 1. Общие сведения о станках данного типа ...................................................................... 7 1.1. Назначение и область применения. Типичные обрабатываемые детали .............. 7 1.2 Реализуемые методы и схемы обработки, применяемые методы и схемы обработки. Применяемы режущие и вспомогательные инструменты, станочные приспособления. ............................................................................................................................... 9 1.3 Обзор аналогичных станков ...................................................................................... 15 1.4 Направление совершенствования станков данного типа ....................................... 27 2. Конструкция Станка модели NBH 6............................................................................ 28 2.1 Описание компоновки. Параметры рабочей зоны .................................................. 28 2.2 Сведения о системе управления станком. Органы настройки параметров исполнительных движений. Настраиваемы параметры движений ........................................... 30 2.3 Описание структурной схемы станка ....................................................................... 32 3. Кинематическая настройка и наладка станка ............................................................. 35 Заключение............................................................................................................................. 36 Литература ............................................................................................................................. 37 Изм. Лист № докум. Разраб. Тарасюк Провер. Данилов Реценз. Н. Контр. Утверд. Подпись Дат а КР.МРС.12.00.000 ПЗ Многоперацион ные фрезернорасточные Лит. Лист Листов 4 37 Гр. 10301215 Введение Станочное оборудование, производимое сегодня, совместимо с разнообразными дополнительными устройствами, которые позволяют осуществлять самую различную обработку, в том числе шлифование, фрезерование, а также рифление, сверление и производить многие другие операции. Данная особенность современных станков предоставляет возможность расширить сферу их использования и применять эти механизмы с максимальной отдачей. На протяжении нескольких последних десятилетий способы обработки металла достигли заметного прогресса. Примитивные устройства, которые осуществляли не более двух операций, были сменены универсальными многооперационными станками широкого предназначения, которым под силу производить множество различных видов обработки при разных скоростях. Многоцелевые станки с ЧПУ (числовое программное управление) – это вид современного оборудования, конструкция которого предусматривает наличие специальных систем самонастройки. Прежде всего настройка станка на определенный вид обработки заготовки осуществляется оператором. Первый полученный опытный образец показывает изъяны в просчетах, после чего программа корректируется на основе результатов измерений, полученных после обработки заготовки. С каждой из последующих деталей производят аналогичные действия (осуществление полного измерения специальной системой) до того момента, пока не получат безупречно обработанный образец. Он и станет эталоном для последующей обработки заготовок остальной партии. Производственный цех может оснащаться десятками различных станков, которые могут функционировать одновременно. Соответственно, для каждого такого изделия необходимо по оператору, что является довольно затратным шагом для любого предприятия. Для того чтобы сократить расходную часть, необходимо уменьшить количество таких сотрудников. С станками современного времени можно сделать это, поскольку управление их осуществляется централизованным образом, благодаря заданной программе. В свое время для достижения таких результатов производственные участки с современным оборудованием оснащались АСУ – автоматизированной системой управления, контролируемой ЭВМ. Подобные меры начали принимать еще в конце прошлого века, и устройства с ЧПУ успели превратиться из сенсации в обыденность еще в период Советского Союза. Но стоит отметить, что актуальность данного способа нисколько не уменьшилась и в современном мире. Многооперационные станки сегодняшних дней, оснащенные системой ЧПУ, предоставляют возможность программировать такие значимые этапы процесса металлообработки, как сварка, газорезка, клепка и др., с целью максимального исключения из этих операций человеческий фактор. С годами работы в производственных цехах отличались все большим уровнем автоматизации, благодаря чему появилась возможность сократить участие оператора, как на этапе металлообработки заготовок, так и при сборке готовых деталей и их последующего испытания. Лист Изм Лист № документа Подпись Дата 5 Другими словами, оборудование с ЧПУ, предоставляющее возможность произвести максимальную автоматизацию производственных процессов, – это механизмы, за которыми будущее. Прошло уже немалое количество времени с того периода, когда в нашем государстве появились станки с ЧПУ. Накоплен внушительный опыт работы на таком оборудовании, благодаря чему можно сформировать определенные выводы, а именно выделить главные конкурентные особенности многооперационных устройств с ЧПУ перед механизмами обычного плана, которые задействуются в процессе металлообработки. Лист Изм Лист № документа Подпись Дата 6 1. Общие сведения о станках данного типа 1.1. Назначение и область применения. Типичные обрабатываемые детали Отличительной особенностью фрезерно – расточных станков является наличие горизонтального шпинделя, совершающего движение осевой подачи. Диаметр выдвижного шпинделя, определяющий основной размер станка, D = 80...320 мм. Станки являются широкоуниверсальными и позволяют проводить различные виды работ: растачивание, фрезерование (в том числе отверстий), сверление, подрезание торцов, нарезание резьб метчиком и резцом, зенкерование и т. п. Точность формы расточенных отверстий зависит от их размеров и колеблется в пределах 2…15 мкм. Отклонение округлости отверстий, полученных фрезерованием с использованием системы ЧПУ, составляет около 30 мкм. Современные станки имеют индивидуальные приводы подач от регулируемых двигателей для каждой оси. Величина рабочих подач достигает 12 000 мм/мин, а ускоренных — 15 000 мм/мин, контурное управление с числом осей от 3 до 8. Точность позиционирования узлов составляет около 15…30 мкм на длине 1 м. Зона нечувствительности — около 5 мкм, а повторяемость — около 10 мкм. Дальнейшее повышение точности часто ограничивается температурными явлениями. Точность позиционирования поворотного стола 5′′. На рис. 1.1. представлена типовая деталь, включающая весь комплекс вышеописанных операций. Рис. 1.1. Типовая деталь Преимущества станков: 1) удобные установка, закрепление и обзор заготовки; 2) возможность обработки заготовок с четырех сторон без переустановки; 3) упрощена автоматизированная смена инструмента и стола-спутника с деталью и заготовкой. Лист Изм Лист № документа Подпись Дата 7 Недостатком станков является ограничение режимов обработки в зависимости от вылета шпинделя (особенно при вылете, превышающем 4...5 диаметров шпинделя). При малом вылете эффективно используется мощность главного привода, достигающая Р ≈ 0,3D, где Р в кВт, а D в мм. Лист Изм Лист № документа Подпись Дата 8 1.2 Реализуемые методы и схемы обработки, применяемые методы и схемы обработки. Применяемы режущие и вспомогательные инструменты, станочные приспособления. Станки являются широкоуниверсальными и позволяют проводить различные виды работ: растачивание, фрезерование (в том числе отверстий), сверление, подрезание торцов, нарезание резьб метчиком и резцом, зенкерование и т. п. (рис. 1.2). При использовании дополнительных сменных узлов (фрезерных головок, планшайб и др.) можно проводить фрезерование взаимно-перпендикулярных плоскостей (рис. 1.2, г, схема II), растачивать канавки при перемещении ползушки планшайбы, устанавливаемой на шпинделе, обрабатывать наружные цилиндрические поверхности (рис. 1.2, г, схема III) и т.п. Рис. 1.2. Схемы обработки различных поверхностей на горизонтально-расточном станке: а — сверление (схема I), развертывание (схема II), нарезание резьбы метчиком (схема III), зенкерование (схема IV); б — фрезерование (схема I) цилиндрической, торцовой (схема II), концевой (схема Ш), угловой (схема IV) фрезами; в — растачивание: сквозных отверстий (схема I), с подрезкой торца (схема II), подрезка торца (схема Ш), получение конической поверхности (схема IV); г — обработка различных поверхностей с использованием дополнительных приспо соблений: горизонтальных плоскостей с помощью угловой фрезерной головки (схема I), взаимно-перпендикулярных плоскостей с помощью поворотной (на 90°) фрезерной головки (схема II), наружной поверхности, торца и кольцевой канавки с помощью планшайбы с радиально перемещаемой ползушкой (схема III) Лист Изм Лист № документа Подпись Дата 9 Методы формообразования поверхностей При обработке заготовок резанием различают четыре метода формообразования поверхностей: копирования, следа, касания, обкатки. Выбор соответствующего метода для получения различных поверхностей сводится к установлению движений формообразования, которые воспроизводят образующие и направляющие линии этих поверхностей. Метод следа (рис. 1.3) состоит в том, что форма производящей линии получается в виде следа режущей точки (практически это весьма короткий отрезок линии) кромки инструмента при относительном движении заготовки и инструмента. Поэтому для получения производящей линии методом следа необходимо одно простое или сложное формообразующее движение (в зависимости от формы образуемой линии). Рис. 1.3. Метод следа Метод копирования основан на том, что режущая кромка инструмента по форме совпадает с производящей линией. На (рис. 1.4) показан пример обработки зубьев цилиндрического колеса. Контур режущей кромки фрезы совпадает с профилем впадин и воспроизводит образующую линию. Направляющая линия получается прямолинейным движением заготовки вдоль своей оси. Здесь необходимы два формообразующих движения: вращение фрезы и прямолинейное перемещение заготовки. Кроме этого, для обработки последующих впадин заготовка должна периодически поворачиваться на угол, соответствующий шагу зацепления. Такое движение называют делительным. Метод касания заключается в том, что форма производящей линии возникает в виде огибающей мест касания множества режущих точек вращающегося инструмента в результате относительных движений оси вращения инструмента (шпинделя) и заготовки. Этот метод характерен при образовании производящих линий с участием таких инструментов, как фрезы и шлифовальные круги, имеющих множество режущих точек, а следовательно, точек касания, формирующих траекторию образуемой производящей линии. Для получения производящей линии методом касания требуется два, реже три формообразующих движения не связанных функционально между собой. (рис. 1.4). Лист Изм Лист № документа Подпись Дата 10 Рис. 1.4. - Методы образования поверхностей: метод копирования в сочетании с методом касания Многоцелевой фрезерно-расточной станок отличает высокое быстродействие всех механизмов. Скорость вспомогательных перемещений приводов подач достигает 20 м/мин. Устройства автоматической смены инструмента обычно имеют цикл работы 3…6 с. Время автоматической смены заготовок при использовании столовспутников может занимать 20…70 с. В то время как один из столов-спутников находится на станке и установленная на нем заготовка обрабатывается, на других столах-спутниках могут производиться следующие операции: смена обработанной заготовки на необработанную, переустановка и зажим частично обработанной заготовки в другое положение, доставка заготовки после обработки в позиции контроля или промывки, доставка детали на межоперационные транспортные устройства. Комплект режущего и вспомогательного инструмента для МЦ при обработке корпусных и плоских деталей показан на рис. 1.5. Вспомогательным инструментом является ряд шпиндельных оправок, переходных оправок и зажимных патронов. Непосредственно в шпинделе станка закрепляются: оправки а, б, в — для расточного инструмента; оправки г, д, е — для фрез с торцовой или продольной шпонкой, передающих крутящий момент режущему инструменту; цанговый патрон ж — для сверл, зенкеров, разверток и небольших фрез, имеющих цилиндрический хвостовик; специальный патрон з — для метчиков; патрон и — для переходных оправок н—ф, позволяющих регулировать осевое положение инструмента; оправкацентроискатель к; оправка л — для концевого инструмента с конусом Морзе и поводком; оправка м — для концевого инструмента с конусом Морзе без поводка. Лист Изм Лист № документа Подпись Дата 11 Рис. 1.5. Комплект режущего и вспомогательного инструмента для ОЦ с ЧПУ На рис. 1.6. показан вариант привода поворота инструментального магазина, размещенного на верхнем торце стойки 2 станка. Приводом поворота магазина (с вертикальной осью вращения) служат регулируемый электродвигатель 10 и зубчатая передача 12, 18. Угол поворота отсчитывается с помощью датчиков 14 и 15, установленных на кронштейне 13: датчик 14 взаимодействует с упором 17, фиксирующим исходное положение магазина, а датчик 15 — с упорами 16, установленными против каждого гнезда 20 и служащими для отсчета гнезд инструментальных оправок 21. Корпус магазина 19 имеет круговые направляющие скольжения с накладками 3, 4, 5. Магазин оснащен фиксирующим устройством. На валу электродвигателя закреплен диск 11 с двумя полукруглыми пазами П. Когда инструментальная оправка подходит к позиции смены инструмента, ролик 9 вводится штоком гидроцилиндра 6 в паз диска, а датчик 8 подает команду на выключение электродвигателя и вызов автоматического цикла смены инструмента. Перед следующим поворотом ролик выводится из паза диска и датчик 7 включает электродвигатель. Инструментальные оправки фиксируются в гнездах магазина фиксаторами 24 с шариками 23 и пружинами 22. Датчик 1 контролирует наличие оправки в соответствующем гнезде. Каждая оправка устанавливается в гнездо магазина в определенном угловом положении по направляющей шпонке, что необходимо для совмещения паза оправки со шпонками шпинделя, который при смене инструмента также останавливается в определенном угловом положении. Лист Изм Лист № документа Подпись Дата 12 Рис. 1.6. Привод инструментального магазина Рис. 1.7. Автооператор Чтобы захватить инструмент из магазина, корпус 4 автооператора (рис. 1.7) поднимается гидроцилиндром 6 по цилиндрическим направляющим 5, 7 и один из захватов фиксирует фланец соответствующей оправки. Захваты 9, 10 с пружиной 13 и осями 11, 12 смонтированы в корпусе 20, соединенном с гильзой 18. В крышке 17 гильзы закреплен шарикоподшипник 16, посаженный на шток 15 гидроцилиндра 21. При перемещении поршня 22 движется гильза 18 с захватами и оправки с режущим Лист Изм Лист № документа Подпись Дата 13 инструментом выводятся из гнезда магазина или из посадочного конуса шпинделя. Для поворота корпуса 20 с захватами на 180° служат гидроцилиндр 8 и рейка 3, которая зацеплена с зубчатым венцом 2, закрепленным на стакане 1. Правая часть стакана соединена двумя шпонками 14 и 19 с гильзой 18. Устройство автоматической смены столов-спутников с обрабатывае мыми деталями показано на рис. 1.8. Спутник 11 устанавливают на поворотную платформу 7 (вместимостью два спутни ка), на которой смонтированы гидроцилиндры 10 и 13 с Т-образными за хватами 6 и 14 на штоках. При установке на платформу (перемещение по стрелке Б) спутник скобой 12 входит в зацепление с захватом 14. Спутник базируется в позиции ожидания и может перемещаться гидроцилиндром 10 по роликам 8 и 9. Очередную заготовку закрепляют на спутнике во время обработки предыдущей заготовки в позиции ожидания либо вне платформы. После завершения обработки заготовки стол станка автоматически передвигается к устройству смены спутников и фигурная скоба спутника входит в зацепление с захватом 6, предварительно выдвинутым штоком по стрелке А. Затем гидроцилиндром 13 спутник с обработанной заготовкой перемещается на платформу. Чтобы поменять два спутника местами, платформа со стойкой 15 поворачивается на 180o с помощью привода, имеющего гидроцилиндры 5, 16 и реечную передачу 4—3. Положение платформы относительно стола станка можно регулировать болтами 2, 17, расположенными на плите 1. Рис. 1.8. Устройство автоматической смены столов-спутников Лист Изм Лист № документа Подпись Дата 14 1.3 Обзор аналогичных станков Горизонтальный расточной станок с ЧПУ 2А622Ф4 Горизонтальный расточной станок с ЧПУ 2А622Ф4 (рис. 1.9) Предназначен для выполнения разнообразных расточных, фрезерных и сверлильных работ, включая контурное фрезерование и нарезание резьб метчиками. Шероховатость обработанной поверхности отверстия при чистовом растачивании резцом ВК8, установленным в выдвижном шпинделе, в чугуне СЧ15, ГОСТ 1412—79; Ra=1,6 мкм. Станок выполнен в компоновке с неподвижной стойкой, несущей вертикальноподвижную шпиндельную бабку с выдвижным шпинделем и встроенным поворотным столом, имеющим продольное и поперечное (относительно оси шпинделя) перемещение. Раздельные приводы подач позволяют осуществлять одновременную обработку по трем координатам и выбрать наиболее оптимальный режим резания, а также изменять величину подачи узлов в процессе резания. Подвижные узлы перемещаются с помощью шарико-винтовых передач качения с предварительным натягом. Смазка направляющих подвижных узлов и главного привода автоматизирована. Встроить станок в автоматическую линию нельзя. Степень автоматизации — Ф4 (управление в контурном режиме). Управление станком 2А622 осуществляется устройством числового программного управления (УЧПУ). Программируемые перемещения по четырем осям - X, Y, Z ,W. Ось В работает в режиме позиционирования. Отсутствуют загрузочное устройство и устройство для транспортирования стружки. Система СОЖ состоит из насосной станций емкостью 200 л, устройства полива инструмента и детали и системы сбора СОЖ. Станок имеет удобную вспомогательную систему ручного управления с пульта. Зона обработки освещается светильником с люминисцентными лампами, встроенным в шпиндельную бабку. Вредные выделения отсутствуют. По сравнению с предыдущими исполнениями станка модели 2А622Ф4 исполнение 04 имеет следующие преимущества: применена новейшая отечественная система ЧПУ класса CNC 2C42—65 с выносным пультом, увеличенными размерами дисплея, с увеличенным объемом памяти до 96К, в том числе объем энергонезависимой памяти (ПЗУ) составляет 48К; вся релейная автоматика станка записана в ПЗУ УЧПУ, что позволило исключить большое количество релейно-контактной аппаратуры на станке и тем самым повысить надежность и долговечность электрооборудования; режим записи управляющей программы во время обработки детали в ручном режиме (самообучение станка) исключил этап предварительной подготовки программы и ее проверки на станке; Лист Изм Лист № документа Подпись Дата 15 в режиме программного управления имеются дополнительные автоматические циклы расфрезерования отверстий и обработки крепежных отверстий под фланец, что упрощает и сокращает процесс управляющей программы; система диагностики поиска неисправностей с выведением причин неисправностей на дисплей повышает ремонтоспособность станка, резко сокращает время поиска неисправностей; устройство ЧПУ позволяет хранить программы как на перфоленте, так и на магнитной ленте кассетного магнитофона, что обеспечивает удобство записи, перезаписи и хранения программ; наличие подвижного пульта управления с дисплеем, на который выводятся необходимые для работы данные, обеспечивает удобство управления станком. Конструктивные и эксплуатационные особенности станка 2А622Ф4: Поворотный рабочий стол автоматически останавливается в положениях 0, 90, 180, 270 градусов и имеет высокоточные датчики обратной связи по всем координатам Телескопическая защита и автоматизированная смазка направляющих Быстродействующие автоматические гидрозажимы Шарико-винтовые передачи качения с предварительным натягом Механизированный зажим инструмента Шпиндельный узел смонтирован на прецизионных подшипниках качения Шпиндельная бабка с выдвижным шпинделем подвижна в вертикальном направлении Станок соответствует высоким требованиям современного технического уровня станкостроения. Шумовые характеристики в соответствии с ОСТ2 Н89-40—75. Уровень вибрации в соответствии с ГОСТ 12.2.009—80. Транспортирование станка должно осуществляться: для внутрисоюзных поставок в таре согласно ГОСТ 10198—78. Категория упаковки — КУ-2 по ГОСТ 23170—78Е и ОСТ2 М92-1—81. Временная противокоррозийная защита (консервация) осуществляется в соответствии с ГОСТ 9.014—78 и ОСТ2 Н89-30—79. Выбор транспортной упаковки и условий транспортирования осуществляется в соответствии с ГОСТ 7599—82 и ОСТ Н92-1—81. Разработчик—Ленинградское ОКБС. Класс точности станка Н по ГОСТ 8—82Е. Характеристики станка представлены в таблице 1.1. Лист Изм Лист № документа Подпись Дата 16 Рис. 1.9. Станок модели 2А622Ф4 Таблица 1.1 характеристики станка 2А622Ф4 Наименование параметра 2А622Ф4 Основные параметры станка Диаметр выдвижного расточного шпинделя, мм Ø 110 Наибольший диаметр растачиваемого отверстия, мм Ø 240 Наибольший диаметр сверла (по конусу), мм Ø 50 Наибольший диаметр фрезы, мм Ø 250 Стол Рабочая поверхность стола, мм 1250 х 1250 Наибольшая масса обрабатываемого изделия, кг 5000 Наибольшее продольное перемещение стола (Z), мм 1000 Наибольшее поперечное перемещение стола (X), мм 1250 Наибольший поворот (B), град Пределы рабочих подач стола (X, Y, Z, W), мм/мин 1..3200 Пределы рабочих подач стола (B), град/мин Наибольшее усиление подачи стола (вдоль и поперек), Н (кгс) 19600 (2000) Скорость быстрых продольных перемещений (X, Y, Z, W), м/мин 8 Лист Изм Лист № документа Подпись Дата 17 Скорость быстрых установочных круговых перемещений (B), об/мин Шпиндель Наибольшее горизонтальное (осевое, продольное) перемещение шпинделя, мм 710 Частота вращения шпинделя, об/мин 4..1250 Дискретность задания скоростей шпинделя 1 Наибольший крутящий момент на шпинделе, Н (кгс*м) 1765 (180) Пределы рабочих подач шпинделя (W), мм/мин 1..3200 Пределы рабочих подач шпиндельной бабки вертикально (Y), мм/мин 1..3200 Скорость быстрых перемещений шпиндельной бабки вертикально (Y), м/мин 8 Наибольшее вертикальное перемещение шпиндельной бабки (Y), мм 1000 Скорость быстрых перемещений шпинделя (W), м/мин 8 Наибольшее осевое усиление подачи (X, Y, Z, W), Н (кгс) 10780 (11000) Конец выдвижного шпинделя по ГОСТ19860-74 50АТ5 Устройство программного управления (УЧПУ) Модель УЧПУ 2C42—65 Количество одновременно управляемых координат 3/4 Дискретность задания координат 0,001 Привод Количество электродвигателей на станке 10 Электродвигатель привода главного движения Мощность, кВт 20 Электродвигатель привода подач, Н*м 47 Суммарная мощность электродвигателей, кВт 50,6 Габариты и масса станка Габариты станка, включая ход стола и салазок, мм 3980 х 6335 х 3980 Масса станка, кг 20500 Лист Изм Лист № документа Подпись Дата 18 Многоцелевой станок с ИС 800 Многоцелевой горизонтально-фрезерный обрабатывающий центр ИС-800 (рис 1.10) предназначен для обработки особо сложных корпусных деталей в автономном режиме работы и в составе гибких производственных систем. На станке выполняются сверление, зенкерование, растачивание точных отверстий по точным координатам, фрезерование по контуру с линейной и круговой интерполяцией, нарезание резьб резцами и метчиками. Конструктивные особенности Станок имеет общую Т-образную станину, на которой расположены продольноподвижная портальная стойка и поперечно-подвижный стол. Внутри продольноподвижной стойки расположена бесконсольная вертикально-подвижная шпиндельная бабка. Вертикально-подвижная шпиндельная бабка (ось Y) перемещается по закаленным стальным направляющим внутри портальной стойки, перемещаемой продольно (ось Z). Поперечно-подвижной стол перемещается по оси X. Рядом со станком расположены инструментальный магазин и накопитель столовспутников. Все базовые детали имеют максимальную жесткость и виброустойчивость при высокопроизводительной обработке, а также гарантируют длительное сохранение точности. Жесткий шпиндель с конусом ISO 50 имеет высокую поверхностную прочность — 58 HRC. Шпиндель смонтирован на прецизионных подшипниках, что обеспечивает оптимальную точность, жесткость и виброустойчивость. Гидромеханическое устройство зажима инструмента в шпинделе гарантирует надежность и быстродействие крепления режущего инструмента с усилием 15000 кг. В конструкции предусмотрено устройство для обдува конуса шпинделя. Перемещения подвижных узлов по осям X, Y, Z осуществляются от высокомоментных электродвигателей, которые через сильфонные беззазорные муфты соединены с шариковыми винтовыми парами. Шпиндель приводится во вращение высокомоментным электродвигателем через трехступенчатую коробку скоростей. Изменение частоты вращения шпинделя достигается изменением частоты вращения электродвигателя и переключением зубчатых колес коробки скоростей. Стол размером 500 x 500 позволяет обрабатывать детали любой конфигурации. Стол с дискретной подачей обеспечивает поворот обрабатываемой детали с точностью до ±5 угловых секунд на углы, кратные 3° (120 позиций). На поворотной плите стола устанавливается стол-спутник. Для установки детали на поверхности стола-спутника имеется сетка отверстий. Автоматическая смена столов-спутников из двух- или восьмиместного накопителя обеспечивает работу станка в автоматическом режиме, исключает из технологического Лист Изм Лист № документа Подпись Дата 19 цикла время на установку и снятие детали, дает возможность встраивания станка в гибкие переналаживаемые системы. Автоматическая система смены инструмента расположена слева от станка и состоит из инструментального магазина и закрепленного на его корпусе манипулятора. Инструменты хранятся и транспортируются в кодированных гнездах цепной передачи. В зависимости от исполнения станки комплектуются магазинами емкостью в 64, 40 или 100 инструментов. Смена инструмента осуществляется сочетанием перемещения цепи и манипулятора. Выбор инструмента возможен в любой последовательности. Устройство автоматической уборки стружки. Из зоны резания стружка удаляется шнековыми транспортерами и системой лотков, что обеспечивает полное удаление стружки и СОЖ за пределы станка во время обработки и делает возможным встраивание станка в гибкие переналаживаемые системы, исключая из технологического цикла время на уборку стружки. Система СОЖ осуществляет: подачу СОЖ через инструмент в зону резания; подачу СОЖ в зону резания через сопло шпинделя; гидросмыв стружки из зоны резания; очистку СОЖ с помощью центрифуги; циркуляцию СОЖ из зоны резания в бак и удаление стружки. Ограждение надежно защищает оператора от стружки и СОЖ. Стеклянные стенки и окна позволяют вести визуальный контроль процесса резания Система смазки автоматическая, управляется от ЧПУ станка. Пневмосистема обеспечивает следующие операции по командам, получаемым от ЧПУ станка: обдув конуса шпинделя; обдув платиков стола; открытие и закрытие шторы манипулятора; открытие и закрытие дверей ограждения зоны резания. Класс точности станка — П по ОСТ2-Н72-6—85. Разработчик — Ивановское ГКБ «СТАНКОСИСТЕМА». Основные характеристики приведены в таблице 1.2. Лист Изм Лист № документа Подпись Дата 20 Рис. 1.10 – многоцелевой станок с ЧПУ ИС 800 Таблица 1.2. Характеристики станка ИС 800 Наименование параметра ИС-800ПМФ4 Основные параметры станка Класс точности по ГОСТ 8-82 П Размеры рабочей поверхности стола (длина х ширина), мм 800 х 800 Перемещение поперечное стола (ось X), мм 1000 Перемещение вертикальное шпиндельной бабки (ось Y), мм 1000 Перемещение продольное стойки (ось Z), мм 800 Вращение индексируемого поворотного стола (ось B), град 3° 120 поз. Дискретность непрерывного вращения индексируемого поворотного стола (ось B), град 0,001 Диаметр сверления в стали, мм 3..45 Наибольший диаметр нарезания резьбы в стали, мм М6..М100 Наибольший диаметр растачиваемого отверстия, мм 315 Наибольший диаметр торцовой фрезы, мм 315 Производительность съема стружки (22 кВт), см³/мин 450 Точность позиционирования по осям X/ Y, мм Точность позиционирования по осям Z, мм Рабочая подача по осям X, Y, Z, мм/мин 1..6000 Скорость быстрых установочных перемещений по осям X, Y, Z, м/мин 15 Наибольшее допустимое усилие подачи стола по оси X, Н 12500 Лист Изм Лист № документа Подпись Дата 21 Наибольшее допустимое усилие подачи шпиндельной бабки (вертикальное) по оси Y вниз/ вверх, Н 10000/ 5000 Наибольшее допустимое усилие подачи стойки по оси Z, Н 15000 Расстояние от оси шпинделя до стола, мм 20..1020 Расстояние от торца шпинделя до оси стола, мм 200..1000 Модель устройства ЧПУ Количество управляемых координат 3 Количество одновременно управляемых координат при линейной/ круговой интерполяции 3/3 Рабочий стол Максимальная нагрузка на стол (по центру), кг 1600 Количество резьбовых отверстий на поверхности стола 47 Диаметр резьбовых отверстий на поверхности стола, мм М16 Шпиндель Частота вращения шпинделя, об/мин 8..4500 Количество скоростей шпинделя Наибольший крутящий момент, Нм 980 Конус шпинделя для крепления инструмента 7:24 50 Магазин инструмента Количество инструмента в магазине 64 Время смены инструмента, с 8 Время смены инструмента от стружки к стружке, с 20 Максимальный диаметр рядом стоящего инструмента, мм 125 Максимальный диаметр свободно стоящего инструмента, мм Максимальная длина инструмента от торца шпинделя, мм 400 Масса инструментальной оправки с инструментом, кг 25 Устройство смены столов-спутников Время смены столов-спутников, с 40 Электрооборудование и привод Количество электродвигателей на станке Электродвигатель постоянного тока привода главного движения, кВт Электродвигатели привода подач (X, Y, Z, B) и магазина, Н.м Электродвигатель насоса гидростанции, кВт Электродвигатель вентилятора гидростанции, кВт Лист Изм Лист № документа Подпись Дата 22 Электродвигатель вентилятора шпинделя, кВт Электродвигатель насоса смазки шпиндельной бабки, кВт Электродвигатель насоса смазки направляющих, кВт Электронасос охлаждающей жидкости Мощность, кВт Суммарная мощность всех электродвигателей на станке, кВт Габариты и масса станка Габариты станка (длина ширина), мм 6150 х 4750 Габариты станка (высота), мм 4000 Масса станка, кг 17000 Лист Изм Лист № документа Подпись Дата 23 Многоцелевой станок с ЧПУ ИР 800 ИР-500 многооперационный горизонтальный обрабатывающий центр (рис 1.11) сверлильно-фрезерно-расточной станок с числовым программным управлением (ЧПУ), автоматической сменой инструмента (АСИ) и сменой обрабатываемых деталей предназначен для высокопроизводительной обработки корпусных деталей массой до 700 кг из конструкционных материалов от легких сплавов до высокопрочных сталей. Широкий диапазон частоты вращения шпинделя и скоростей подач позволяет производить сверление, зенкерование, развертывание, растачивание точных отверстий, связанных координатами, фрезерование по контуру с линейной и круговой интерполяцией, нарезание резьбы метчиками. Наличие поворотного стола, устанавливаемого с высокой точностью (±5 с через 5°), расширяет технологические возможности станка, позволяет обрабатывать соосные отверстия консольным инструментом. Повышенная степень точности станка (класс П) обеспечивает обработку отверстий по 7, 8 квалитетам точности с шероховатостью поверхности Ra 2,5 мкм. Высокая степень автоматизации вспомогательных функций станка включает автоматическую смену инструмента и обрабатываемых деталей, позволяет встраивать его в автоматическую линию с управлением от ЭВМ. Все узлы станка смонтированы на жесткой Т-образной станине, которая является общим основанием. Лобовая бесконсольная шпиндельная бабка расположена внутри портальной стойки. В таблице 1.3 представлены характеристики многоцелевого станка с ИР 800. Рис. 1.11 – многоцелевой станок с ЧПУ ИР 800 Лист Изм Лист № документа Подпись Дата 24 Таблица 1.3. характеристики многоцелевого станка с ЧПУ ИР 500. Наименование параметра ИР-800ПМФ4 Основные параметры станка Класс точности по ГОСТ 8-82 П Размеры рабочей поверхности стола (длина х ширина), мм 800 х 800 Перемещение поперечное стола (ось X), мм 1000 Перемещение вертикальное шпиндельной бабки (ось Y), мм 710 Перемещение продольное стойки (ось Z), мм 800 Вращение индексируемого поворотного стола (ось B), град 3° 120 поз. Наибольший диаметр сверления в стали, мм 40 Наибольший диаметр растачиваемого отверстия, мм 160 Наибольший диаметр торцовой фрезы, мм 160 Точность позиционирования по осям X/ Y, мм Точность позиционирования по осям Z, мм Рабочая подача по осям X, Y, Z, мм/мин 1..3200 Скорость быстрых установочных перемещений по осям X, Y, Z, м/мин 10 Наибольшее допустимое усилие подачи стола и стойки по осям X, Z, Н 10000 Наибольшее допустимое усилие подачи шпиндельной бабки (вертикальное) по оси Y, Н 8000 Расстояние от оси шпинделя до стола, мм 50..760 Модель устройства ЧПУ 2С45-65 Количество управляемых координат 3 Количество одновременно управляемых координат при линейной/ круговой интерполяции 3/3 Рабочий стол Максимальная нагрузка на стол (по центру), кг 150 Количество резьбовых отверстий на поверхности стола 45 Диаметр резьбовых отверстий на поверхности стола, мм М20 Усилие зажима поворотного стола, кН Шпиндель Частота вращения шпинделя, об/мин 21.2..3000 Количество скоростей шпинделя 89 Лист Изм Лист № документа Подпись Дата 25 Наибольший крутящий момент, Нм 630 Конус шпинделя для крепления инструмента 7:24 50 Магазин инструмента Количество инструмента в магазине 30 Время смены инструмента, с 6 Время смены инструмента от стружки к стружке, с 16,2..21,2 Максимальный диаметр рядом стоящего инструмента, мм 125 Максимальный диаметр свободно стоящего инструмента, мм 160 Максимальная длина инструмента от торца шпинделя, мм 300 Масса инструментальной оправки с инструментом, кг 20 Устройство смены столов-спутников Время смены столов-спутников, с 50..70 Электрооборудование и привод Количество электродвигателей на станке 12 Электродвигатель постоянного тока привода главного движения, кВт 18 Электродвигатели привода подач (X, Y, Z, B) и магазина, кВт 2,8 Электродвигатель насоса гидростанции, кВт 5,5 Электродвигатель вентилятора гидростанции, кВт 0,12 Электродвигатель вентилятора шпинделя, кВт 0,12 Электродвигатель насоса смазки шпиндельной бабки, кВт 1,1 Электродвигатель насоса смазки направляющих, кВт 0,02 Электронасос охлаждающей жидкости Мощность, кВт 0,12 Суммарная мощность всех электродвигателей на станке, кВт 43,18 Габариты и масса станка Габариты станка (длина ширина), мм 5388 х 4635 Габариты станка (высота), мм 3455 Масса станка, кг 10050 Лист Изм Лист № документа Подпись Дата 26 1.4 Направление совершенствования станков данного типа К основным направлениям совершенствования и модернизации станков данного типа можно отнести: Замена систем ЧПУ на более совершенные Замена устаревших направляющих на более совершенные Замена приводов подач на современные сервоприводы Применение в приводах главного движения современных асинхронных частотно регулируемых приводов, вместо двигателей постоянного тока Установка более надежных, качественных и современных датчиков линейного перемещения приводов, а так же угла поворота шпинделя Данные изменения позволят увеличить жесткость станков, плавность хода приводов, диапазон регулирования скоростей привода главного движения, скорости быстрых перемещений приводов подач, точность системы управления. Все вышеперечисленное положительным образом скажется на точности обработки, надежности станков, а так же, что является одним из наиболее важных параметров современного машиностроения, производительности оборудования. Далее рассмотрены некоторые из вышеперечисленных механизмов и систем. Лист Изм Лист № документа Подпись Дата 27 2. Конструкция Станка модели NBH 6 2.1 Описание компоновки. Параметры рабочей зоны Горизонтальный фрезерно-расточной станок с ЧПУ модели NBH 6 Предназначен для выполнения разнообразных расточных, фрезерных и сверлильных работ, включая контурное фрезерование и нарезание резьб метчиками. Шероховатость обработанной поверхности отверстия при чистовом растачивании резцом ВК8, установленным в выдвижном шпинделе, в чугуне СЧ15, ГОСТ 1412—79; Ra=1,6 мкм. Рис. 2.1 Общий вид станка мод. NBH 6 Станина 1 представляет собой тяжелую жесткую и оптимальным образом оребренную литую конструкцию. Цельная Т-образная станина основной части станка неподвижно фиксируется на полу цеха посредством трехточечной опоры на опорных элементах с гашением вибраций. Два транспортера для удаления стружки спиральной формы Лист Изм Лист № документа Подпись Дата 28 большого размера, которые расположены на оси Z корпуса станка, обеспечивают оптимальное удаление стружки из рабочей зоны. Закаленные и отшлифованные профильные направляющие с предварительно зажатыми без зазора элементами с циркуляцией роликов служат в качестве направляющих для унифицированных узлов привода осей X и Z. По направляющим 9 перемещается стойка 2. Мощная и оптимально оребренная литая конструкция обрабатывающего модуля с интегрированной осью Y выполнена в виде портальной стойки. Со своей термостабильной симметричной конструкцией она служит для направления корпуса шпинделя 4 в оси Y по закаленным и отшлифованным профильным направляющим 8 с предварительно напряженными без зазора роликовые опоры с циркуляцией роликов. Смазка направляющих осуществляется через расположенные перед направляющей тележкой смазочные блоки. По направляющим 5 перемещается стол 3, который имеет возможность поворота на 360 . Станок оснащен устройством смены столов спутников 6. Для очистки воздуха, подаваемого в различные пневмосистемы станка установлена очистительная станция 7. 0 Рабочая зона многоцелевого фрезерного центра мод. NBH 6 Рис. 2.3. Габарит рабочего пространства станка модели NBH 6 Рис. 2.4. Посадочные и присоединительные базы станка мод. NBH 6. Шпиндель Лист Изм Лист № документа Подпись Дата 29 2.2 Сведения о системе управления станком. Органы настройки параметров исполнительных движений. Настраиваемы параметры движений Для оси X, Y, Z и B установлены бесщеточные сервоприводы трехфазного тока с цифровым управлением в полностью закрытом исполнении. Они обеспечивают высокую скорость подачи и ускоренного хода при постоянной точности позиционирования на осях. Высокая динамика и большая скорость подачи и ускоренного хода станка предъявляют особенно высокие требования к системе компьютерного числового программного управления и к приводам станка. Эти требования могут быть полностью выполнены при помощи использования цифровой приводной техники и мощной системы компьютерного числового программного управления. Станок оснащен новыми системами автоматического управления производства компаний Fanuc и Siemens. Для достижения высоких рабочих характеристик и компактной конструкции двигатели и станок точно согласованы друг с другом. Поэтому нельзя использоватьдвигатели и измерительные системы типов, отличных отпредусмотренных. Система автоматического управления имеет следующие рабочие характеристики: Система компьютерного числового программного управления высшего класса мощности Нарезание резьбы без компенсационного патрона Программирование при помощи программируемого контроллера согласно IEC 1131 Компенсация погрешностей шага шпинделя Управление инструментами Контрольсрока службы (ресурса) режущего инструмента Автоматическое управление однотипными инструментами Счётчик обрабатываемых заготовок Питающий сетевой модуль с системой рекуперацией Цифровые регуляторы шпинделя двигателя и приводов с системой ориентации и контролем зоны перемещений o Подключение и использование двух измерительных систем при взаимном контроле; o Отсутствуют конечные выключатели в точках начала отсчета Из этого вытекает чрезвычайно высокая степень безопасности станка, что в свою очередь приводит к повышенной эффектвности станка и к снижению расходов на техническое обслуживание. Исполнительные движения: Главное движение В1. Скорость и направление вращения шпинделя настраивается с помощью системы управления. Вертикальная подача П2. Настройка скорости вертикального перемещения шпиндельной бабки, а также направление движения задается электродвигателем с Лист Изм Лист № документа Подпись Дата 30 помощью системы управления. Исходная точка, а так же путь обработки задаются при помощи системы управления. Продольная подача стола П3. Настройка скорости продольного перемещения салазок, а также направление движения задается электродвигателем с помощью системы управления. Исходная точка, а так же путь обработки задаются при помощи системы управления Продольная подача ползуна П4. Настройка скорости продольного перемещения ползуна, а также направление движения задается электродвигателем с помощью системы управления. Исходная точка, а так же путь обработки задаются при помощи системы управления Поперечная подача П5. Настройка скорости поперечного перемещения стойки , а также направление движения задается электродвигателем с помощью системы управления. Исходная точка, а так же путь обработки задаются при помощи системы управления Поворот стола В5. Настройка скорости поворота стола, а также направление вращения задается электродвигателем с помощью системы управления. Исходная точка, а так же угол поворота задаются при помощи системы управления Лист Изм Лист № документа Подпись Дата 31 2.3 Описание структурной схемы станка Станок состоит из нескольких частных структур. Каждая из этих структур содержит кинематические группы для двух исполнительных движений: - Движения резания Ф(В1) - Движение подачи – вертикальной Фs1(П2), продольной стойки Фs2(П3), продольной ползуна Фs3(П4), поперечной Фs4(П5). - Вспомогательные движения — все указанные перемещения стола, выполняемые на быстром ходу или вручную, а так же установочный поворот стола Ф(В6). Кинематическая группа движения резания Ф(В1) – простая. Внутренняя кинематическая связь находится между шпинделем и его подшипниками. Внешняя кинематическая связь с органом настройки iv находится между источником движения М1 и шпинделем: 1 iv 2 Кинематическая группа движения вертикальной подачи Фs1(П2) – простая, с внутренней связью в виде поступательной кинематической пары между консолью и станиной. Внешняя кинематическая связь соединяет электродвигатель М2 с передачей винт гайка цепью: 3 4 5 Кинематическая группа движения продольной подачи салазок Фs2(П3) – простая, с внутренней связью в виде поступательной кинематической пары между салазками и станиной. Внешняя кинематическая связь соединяет электродвигатель М3 с передачей винт гайка цепью: 6 7 8 Кинематическая группа движения продольной подачи ползуна Фs3(П4) – простая, с внутренней связью в виде поступательной кинематической пары между ползуном и гильзой. Внешняя кинематическая связь соединяет электродвигатель М4 с передачей винт гайка цепью: 9 10 11 Кинематическая группа движения поперечной подачи стойки Фs4(П5) – простая, с внутренней связью в виде поступательной кинематической пары между поперечными салазками и столом. Внешняя кинематическая связь соединяет электродвигатель М4 с передачей винт гайка цепью: 12 13 14. Кинематическая вспомогательного движения Ф(В6) – простая, с внутренней связью в виде кинематической пары между опорами круглого стала и непосредственно круглым столом. Ее внешняя кинематическая связь находится между источником движения М6 и круглым столом: 15 16 Лист Изм Лист № документа Подпись Дата 32 Рис. 2.5. структурная схема Лист Изм Лист № документа Подпись Дата 33 Описание кинематической схемы станка Чертеж КР.МРС.12.00.000КЗ Кинематическая схема станка приведена на рис. 2.6. Вращение шпинделя осуществляется от двигателя 1 с регулируемой частотой вращения через муфту передается на вал I и через колеса 7 – 8 на вал II. Блок зубчатых колес вала II через зубчатые передачи 9 – 10, либо 11 – 12 передает крутящий момент непосредственно на шпиндель. Вертикальное перемещение шпиндельной бабки, продольное перемещение салазок, продольное перемещение ползуна, поперечное перемещение стойки осуществляются от регулируемых высокомоментных двигателей 2, 3, 4, 5 с датчиками обратной связи через шариковые винтовые пары с шагом Р = 10 мм. Поворот стола осуществляется от электродвигателя 6, затем вращение передается через червячную однозаходную пару 1/120 на поворотный стол станка. Рис. 2.6. – Кинематическая схема станка Лист Изм Лист № документа Подпись Дата 34 3. Кинематическая настройка и наладка станка 1. Кинематическая настройка и наладка главного движения Ф(В1): Конечные звенья (КЗ): вал электродвигателя мощностью N= 50 кВт и номинальной частотой вращения nр = 1000 мин-1 и шпиндель с инструментом; Расчетные перемещения (РП): nэл, мин-1nшп, мин-1; Уравнение кинематического баланса (УКБ): nэд iv=nшп; УКБ в общем виде : 41 48 33 1 (200..9000) nшп мин 20 78 96 Формула настройки (ФН): iv= nшп/ nэд. 2. Кинематическая настройка и наладка вертикальной подачи шпиндельной бабки. Фs1(П2): КЗ: электродвигатель шпиндельная бабка; РП: nэ мин - 1 Sверт мм/мин шпиндельной бабки; УКБ: nэ p=Sверт; (2000) 10 Sверт мм / мин 3. Кинематическая настройка и наладка продольной подачи салазок. Фs2(П3): КЗ: электродвигатель салазки РП: nэ мин - 1 Sпр мм/мин салазок; УКБ: nэp=Sпр; (1...2000) 10 Sпр мм / мин 4. Кинематическая настройка и наладка продольной подачи ползуна. Фs3(П4): КЗ: электродвигатель позун РП: nэ мин - 1 Sпр мм/мин ползуна; УКБ: nэp=Sпр; (1...2000) 10 Sпр мм / мин 5. Кинематическая настройка и наладка поперечной подачи стойки Фs4(П5): КЗ: электродвигатель стойка; РП: nэ мин - 1 Sпоп мм/мин стойки; УКБ: nэ p=Sпоп; (1...2000) 10 Sпоп мм / мин Лист Изм Лист № документа Подпись Дата 35 Заключение В данной курсовой работе мною был произведен анализ реализуемых на станке кинематических схем обработки (их графическое изображение и описание), определены исполнительные движения и их настраиваемые параметры. Разработана и описана структурная схема станка (характеристика входящих в нею кинематических групп исполнительных движений). Разработана и описана кинематическая схема станка. Произведена кинематическая настройка станка (приведены расчетные перемещения, уравнения кинематического баланса). Лист Изм Лист № документа Подпись Дата 36 Литература [1] - Металлорежущие станки: учебник. В 2 т. Т. 2 / В.В. Бушуев, А.В. Еремин, А.А. Какойло и др.; под ред. В.В. Бушуева. Т. 2. — М.: Машиностроение, 2011. — 586 с.; ил. [2] – Расчёт главных приводов станков с ЧПУ: методическое пособие по дисциплине «Конструирование и расчёт станков» для студентов машиностроительных специальностей / В.И. Глубокий, В.И. Туромша. – Минск: БНТУ, 2010. – 176 с. [3] - Проектирование металлорежущих станков и станочных систем: Справочникучебник. В 3-х т. Т,2. Расчёт и конструирование узлов и элементов станков / А.С.Проников, Е.И.Борисов, В.В.Бушуев и др.; Под общ. ред. А. С. Проникова. — М.: Издательство МГТУ им. Н.Э. Баумана: Машиностроение, 1995. — 320 с.: ил. [4] ГОСТ 2.7032011 «Единая система конструкторской документации. Правила выполнения кинематических схем». [5] ГОСТ 2.770-68 «Обозначения условные графические в схемах. Элементы кинематики». Лист Изм Лист № документа Подпись Дата 37