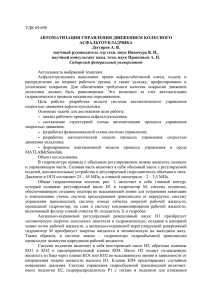
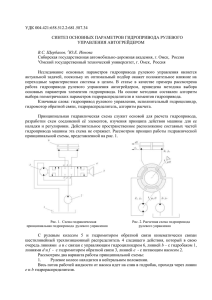
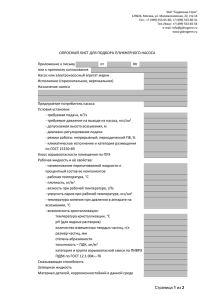
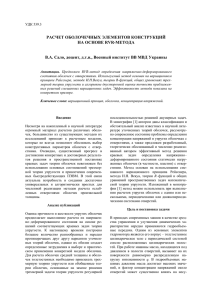
Министерство образования и науки РФ Государственное образовательное учреждение высшего профессионального образования Санкт-Петербургский государственный горный университет Кафедра транспорта и хранения нефти и газа ЗАДАНИЕ на домашнюю работу по дисциплине «Гидро- и пневмопривод машин для строительства газонефтепроводов и газонефтехранилищ» Студенту группы Тема: Составить принципиальную схему, выбрать оборудование, построить статические и динамические характеристики гидропривода машины для строительства газонефтепроводов. 2.Исходные данные: Нагрузка на гидродвигателе: средняя M ср 800 Нм , максимальная M мах 1000 Нм ; Скорость (частота вращения) гидромотора: минимальная 0, средняя ср 120 об / мин , максимальная max 150об / мин ; Масса подвижных частей (момент инерции), приведенных к выходному звену гидромотора: 1,5 кг/м 2 ; Приведенные длины трубопроводов: всасывающего 2 м. _ , нагнетательного 10 м. _ , сливного 8 м. _ . Предельные значения хода поршня гидроцилиндра_2 м; Минимальный сброс через переливной клапан в долях от номинальной подачи насоса_1%; Коэффициент расхода дросселя: 0,7. Закон измерения усилия сопротивления приведенный к выходному звену гидромотора: M ср при t 0 В динамике - M(t) 0,8M 0сс при t 0 Время перехода на новый режим при внешнем возмущении t 0,2с. Вид переходного процесса: апериодический с динамическим забросом не более 15% от нового установившегося значения параметра. 3. Работа оформляется на компьютере и должна содержать бумажную и электронную версии. Примечание: Применить гидромотор вращательного действия. Срок сдачи законченной работы Руководитель работы_________________доц. Дата выдачи задания Вид движения выходного звена гидропривода – вращательный. Реверсирование вращения затвора осуществляется с помощью реверсивного насоса. Системы дроссельного регулирования обычно дешевле систем объемного регулирования, так как позволяют использовать простые по устройству и дешевые насосы, но дроссельное регулирование приводит к более низким КПД и значительному выделению тепла за счет безвозвратных потерь на дросселе. При средней мощности привода до 3 кВт рекомендуется применять дроссели с ручным управлением, до 5 кВт - дроссельные регуляторы потока, а при мощностях выше 5 кВт - объемное регулирование. При одном насосе и гидромоторе, благоприятных условиях охлаждения и больших мощностях целесообразно применять замкнутую схему гидропривода с объемным способом регулирования скорости. Ориентировочно величину средней мощности привода можно вычислить по формуле: N M где М - средний момент на валу гидромотора, Нм; - угловая скорость выходного звена гидродвигателя при средней нагрузке, рад/с; - ориентировочное значение КПД гидропередачи. n 30 120 30 12,56 рад N M с – средняя скорость гидромотора; 800 12,56 12560 Вт 0,8 2 Анализ возможных гидравлических систем Разомкнутая система циркуляции жидкости применяется в многодвигательном гидроприводе с одним насосом. Поэтому выбираем замкнутую систему циркуляции жидкости. Управление приводом должно осуществлять возможность дистанционного и автоматического управления. Достоинством замкнутой системы циркуляции является то, что давление при всасывании значительно больше атмосферного, что позволяет применять более быстроходные и малогабаритные насосы, может быть любое направление потока в кольцевой линии. Рис. 1. Принципиальная схема гидропривода. Работа привода На рисунке (1) представлена гидравлическая схема проектируемого привода. Вращение от асинхронного короткозамкнутого электродвигателя передаётся насосу 1 и сидящему на одном валу с ним подпиточному насосу 5. Основной насос 1 с гидромотором 4 образуют замкнутую гидропередачу. Вспомогательный насос 5 предназначен для 3 покрытия утечек в гидроприводе. Масло засасывается из бака 8 насосом 5 через приёмный фильтр7 и подаётся к линиям подпитки к обратным клапанам 3. Защита насоса 5 и фильтра 7 осуществляется предохранительным клапаном 6. При повышении давления в гидропередаче выше установки предохранительных клапанов 2 они срабатывают, защищая систему от перегрузки. Выбор гидромотора вращательного действия Инерционная нагрузка Mu JM где , 0 J M 1,5 кг м 2 – момент инерции движущихся масс, приведённый к валу гидромотора; 12,56 рад с – средняя скорость гидромотора; 0 0,2 с – время разгона гидромотора до заданной скорости; M u 1,5 12,56 94,2 Н м . 0,2 Пиковая нагрузка: М ип М соmax M и 1000 94,2 1094,2 H м . По полученным данным выбираем гидромотор МРФ-400/25М1 Каталожные данные гидромотора МРФ-400/25М1 - рабочий объем: qmk 0,4 10 3 м3; - максимальное давление перед гидромотором p“ max = 25 МПа; к - пиковое давление перед гидромотором р м п = 32 МПа; k - номинальная угловая скорость вала m 31,4рад/с; - максимальная угловая скорость вала км.мах = 47,1 рад/с; - минимальная угловая скорость вала км.min.= 0,52 рад/с; к - номинальный момент на валу М м = 1492 H·м; - полный КПД мк 0,9 ; к 0,95 ; - объемный КПД ом Проверяем условие выбора гидромотора: 4 М к м 0 ≥ М с , где 1492 > 1094,2 H·м.; км.max 0 км.min , где 41,7 > 12,56 > 0,52 с-1, что удовлетворяет данным условиям. Перепад давлений на гидромоторе при средней и максимальной нагрузках с учетом, что в статике M м M со ; M м max M со max определяем по формулам: p p м max 2M м 2 800 13,9 МПа , q м гм м 0,4 10 3 0,9 2M M max 2 1000 17,4 МПа . q м гм м 0,4 10 3 0,9 Давление в сливной магистрали принимаем p сл p слk 0,7 МПа , определяем давление на входе гидромотора: p м p м pсл 13,9 0,7 14,6 МПа p м max p м max pсл 17,4 0,7 18,1 МПа Уточним объемный КПД гидромотора при средней нагрузке M со 800 Нм и угловой скорости м о 12,56 рад 1 ом ом 1 k с по формуле: 1 1 p k 1 14,6 31,4 1 мk ммо 1 1 0,90 0,95 18,1 12,56 pм Расход гидромотора при средней скорости о 12,56c 1 и нагрузке M со 800 Нм определим по формуле: Qм q м м 0,4 10 3 12,56 0,88 10 3 м 3 / с 53,2 л / мин 2ом 2 0,9 Выбор гидравлических устройств Клапаны 2 обеспечивают защиту привода при перегрузках гидромотора и должны быть настроены на давление рм max. Более точно давление открытия предохранительных клапанов можно определить после расчета динамики системы. р2=рм max=18,1МПа Q2=Qм=53,2л/мин; Выбираем предохранительные клапаны КПЕ-20, их параметры: расход рабочей жидкости: - номинальный 63 л/мин; 5 - минимальный 8 л/мин; рабочее давление: - минимальное 5 МПа; - номинальное 32 МПа; Обратные клапаны КО-50: - условный проход 50 мм; - номинальный расход 500 л/мин; - номинальное давление 32 МПа; - потери давления 0,2 МПа; Фильтр ФГС32-05: - номинальная пропускающая способность 63 л/мин; - тонкость фильтрации 0,08 мм; - условный проход 32 мм. Расчет трубопроводов Принимаем металлические круглые трубы. Задаемся предельными скоростями течения: в нагнетательной гидролинии 3 м/с, сливной 2 м/с, всасывающей 1,2 м/с. Определим диаметры трубопроводов нагнетательного, сливного и всасывающего при угловой скорости вращения гидромотора 0= 12,56 рад/с: DTH 2 Qм 0,88 10 3 2 0,019 м; u max 3,14 3 DTСС 2 Qм 0,88 10 3 2 0,023 м; u max 3,14 2 DTВВ 2 Qм 0,88 10 3 2 0,03 м; umax 3,14 1,2 Так как гидромотор реверсивный, диаметры трубопроводов на нагнетание и слив 3мм , жидкость принимаем одинаковыми, т.е. D 23 мм , на всасывании D т твс принимаем – гидравлическое масло МГ-30 (ТУ38-10150-79), 890кг / м 3 . Фактические скорости: 6 uTBC uT 4Q м 4 0,88 10 3 1,23 м / с; 2 3,14 0,032 DTBC 4Q м 4 0,88 10 3 2,11 м / с; DT 2 3,14 0,0232 Числа Рейнольдса и коэффициенты гидравлического трения для ν = 30мм2/с = 3∙10м /с, где ν – коэффициент кинематической вязкости, м2/с. 5 2 Re T Re TВВ uT DT 2,11 0,023 64 64 1617,6; T 0,037 5 3 10 Re T 1617,6 ; uTBC DTBC 1,23 0,03 1230; TBC 0,052 3 10 5 Потери давления: - в нагнетательной гидролинии: pTH T 2 lTH иТ 10 ( 2,11) 2 0,037 890 3,18 10 4 Па 0,0318МПа ; DT 2 0,023 2 - в сливной: pсл T 2 lсл иТ 8 ( 2,11) 2 0,037 890 2,54 10 4 Па 0,0254 МПа DT 2 0,023 2 - во всасывающей: 2 l и 2 (1,23) 2 pвс TВВ вс ТВС 0,052 890 0,233 10 4 Па 0,00233МПа DTВВ 2 0,03 2 Выбор насоса и электродвигателя Давление и подачу на выходе из насоса определим для средней нагрузки и скорости: pн p м pTH 14,6 0,0318 14,63 МПа; Qн Q м Q13 Q14 Q15 Q12 Исходя из того, что утечки в предохранительных клапанах отсутствуют, требуемая подача насоса равна: Qн Q м 53,2 л / мин 0,88 10 3 м 3 / с ; 7 Для выбора насоса составим табл.1. Таблица № 1 Тип насоса НАР 63/20 p нk , p нk max , нk Q нk q нk , МПа МПа рад с л / мин м3/с 20 25 157 89 6,3·10 онk нk 0,95 0,89 -5 Параметр регулирования: 0,1 н 1; J нk 0,016кг м 2 Определим объемный КПД для подачи Qн : он qk k p k 1 (1 он ) н н нk 2Qн pн 1 63 10 6 157 14,63 1 (1 0,95) 2 0,89 10 3 20 1 0,94; Определим мощность на валу насоса при средней нагрузке и угловой скорости гидромотора с учетом, что для проектируемого привода pнр pн pTBC 14,63 0,00233 14,632 МПа; Полный КПД для средней нагрузки: н нк N вн Qн pнр н он 0,94 0,89 0,88 ; к он’ 0,95 0,89 10 3 14,632 106 14,8кВт 0,88 Емкость бака определим по трехминутной производительности насоса: 90 k k k 90 Wб qн н он 63 10 6 157 0,89 0,25 м 3 . 3,14 Полученную величину округляем до ближайшего значения по ГОСТу - Wб 0,25 м 3 . 8 Для выбора электродвигателя составим табл.2 Таблица № 2 Тип электродвиг ателя 4А160М4У З N kэ , кВт 18.5 M Эk max M Эk sk , sкр , эс , J kэ , % % рад / с кг / м 2 2,3 2,2 16,0 157 0,13 Момент на валу электродвигателя определяется по формуле: N эk 18,5 103 k Mэ 120,4 Вт эс (1 S k ) 157(1 0,022) Удовлетворяет условям M эк M и 120,4 94,2 N эk 1,1N вн 18,5 16,28 Скольжение при средней нагрузке: N вн’ к 14,8 S (1 S к ) 0,5 0,25 0,022 (1 0,022) 0,017 . к 18,5 NЭ Угловая скорость насоса при средней нагрузке н эс (1 S ) 157(1 0,017) 154,3 рад / с После выбора оборудования выполним расчет коэффициентов утечек и составим таблицу 3. Таблица № 3 S 0,5 0,25 Оборудование Формула Числовые значения коэффициентов, м4∙с/кг. аум = Гидромотор МРФ 400 q км км 1 1 к к 2 314 , p м о м а ум 0,4 10 3 31,4 1 1 4,2 10 12 6 2 3,14 25 10 0,95 а ум 63 10 6 157 1 0,95 3,9 10 12 2 3,14 20 106 аун = Насос НА 63/20 q кн кн 1 ко н к 2 314 , pн Расчет статических характеристик Момент на валу насоса при средней нагрузке и средней угловой скорости гидромотора по формуле Mн N вн н 14,8 103 95,9 Hм . 154,3 Коэффициент трансформации момента, передаточное число и КПД гидропередачи 9 kм i M м M со 800 8,35; M н M н 95,8 н н 154,3 12,28. м о 12,56 kм 8,35 0,67 . i 12,28 Уточенный полный КПД гидромотора при средней нагрузке по формуле м мk ом k гм м ом 0,89 0,9 / 0,95 0,87; k ом КПД гидросети с p мQ м 14,6 53,2 0,92 . p н Qн 14,63 53,2 КПД гидропередачи м с н 0,87 0,92 0,88 0,70 . Значение КПД отличаются менее чем на 5%, следовательно, расчет сделан правильно. Построим механистическую характеристику, соответствующую средней скорости вала гидромотора. Параметр регулирования насоса определяется по формуле: н 2Qн 2 0,89 10 3 0,61 . qннон 63 10 6 154,3 0,95 Параметры холостого хода определим по формулам: M мх qм 1 p м (1 гм м ) 0,4 10 3 14,6 106 (1 0,9) 92,9 Нм; 2 2 p м х 2M м х 2 92,9 1,62 МПа; q м гм м 0,4 10 3 0,9 p м х p м х pсл 1,62 0,7 2,32 Па pнх p м х pн 1,62 0,0318 1,65МПа. Пренебрегая скольжением на холостом ходу, определим объемный КПД насоса онх нk pн 1 (1 ) нн pнk k он онх 1 (1 0,95) Qнх qн н 157 1,65 0,993; 0,61 154,3 20 н 154,3 онх 63 10 6 0,61 0,994 1,53 10 3 м 3 / с . 2 2 10 Скорость холостого хода по формуле: мх 2 Qнх pнх a yн p м хa yм q мk 2 [1,53 10 3 1,65 106 4,2 10 12 2,32 106 3,9 10 12 ] 3 0,4 10 23,77 с 1 Точки с координатами (23,77; 0) и (12,56; 1000) определяют положение механической характеристики для н 0,61 . Мехническая характеристика Угловая скорость, рад/с 25 20 15 10 5 0 0 1000 Момент, Н·м Скоростную характеристику построим по формуле для средней нагрузки M м M со 800 Нм 2 2 q мk м k н нj k M с0 M MX a yM a yH a y14 a y15 qн qм 400 10 6 2 800 92,9(3,9 10 12 4,2 10 12 ), 154,3 нj 6 3 63 10 0,4 10 2 н 979,6 н 1,782. Зону нечувствительности при м = 0 определим по формуле: 0 1,782 0,0018 979,6 11 Угловая скорость, рад/с 30 Скоростная характристика 25 20 15 10 5 0 0,00182 0,00999 0,01815 0,02632 Параметр регулирования насоса 12 Расчет динамических характеристик гидропривода Расчет динамических характеристик гидропривода проведем при постоянном значении параметра регулирования и изменении нагрузки на гидромотор, которая в данном случае зависит от угловой скорости м и коэффициента k с , характеризующего сопротивляемость породы бурению и являющегося внешним возмущением. За исходный режим принимаем работу привода при средней нагрузке M м M со 800Нм и м о 12.56c 1 . Пренебрегая распределенностью параметров, примем pн ( t ) pм ( t ) Уравнение динамической характеристики асинхронного двигателя с учетом э (t ) н (t ) примет вид: T1 dM э (t ) M э (t ) (эс н (t )) dt Уравнение нагрузки электродвигателя: Jн d м (t ) q k (t ) q k p (t ) M э (t ) н н pн (t ) н вс н , dt 2гмн 2гмн где J н J kэ J нk . Уравнение нагрузки гидромотора: Jм d м (t ) q мk qk pн (t ) гмм м pсл гмм k с (t ) м (t ) . dt 2 2 Уравнение движения жидкости в нагнетательном трубопроводе, включая насос и гидромотор: q мk W dpн (t ) qнk нн (t ) м (t ) pн (t )a yм a yн a y14 a y15 . Eп dt 2 2 Перепишем систему уравнений в безразмерном виде, обозначая M э (t ) M э M э (t ) ; н (t ) н н (t ) ; м (t ) м м ( t ) ; pн ( t ) pн p н ( t ) ; k с (t ) k со k с (t ) , и вычислим постоянные коэффициенты при средней нагрузке и угловой скорости гидромотора. Тогда уравнение асинхронного двигателя примет вид T1 dM э M э (t ) k1 k1н (t ) , dt где T1 1 1 0,04с; c S кр 154,3 0,16 13 k1 эс Mн M эк 120,4 56,87. k S M н 0,022 95,9 Уравнение нагрузки электродвигателя после деления всех членов на коэффициент при M э ( t ) : dн (t ) M э (t ) k 2 pн (t ) k 3 , dt T2 где ( J нk J эk )н (0,016 0,13) 154,3 0,23с; Mн 95,9 T2 k2 k3 qнk н pнр 63 10 6 0,61 14,632 10 6 1,03 ; 2 0,9 95,9 2гм нM н qнk н pвс 63 10 6 0,61 2,33 103 1,6 10 4 0. 2гмнM н 2 0,9 95,9 Уравнение нагрузки гидромотора после деления на коэффициент при p н (t ) : d м (t ) pн (t ) 0,8M э (t ) , dt T3 где T3 2J м м 2 0,13 12,56 0,0019с; k q м pн гм м 0,4 10 3 14,63 106 0,9 Уравнение движения жидкости после деления на коэффициент при pн ( t ) : T4 dpн (t ) pн (t ) k 6н (t ) k 7 м (t ) 0 , dt где Eж EП 1 Eж DT' ET W W (0,023) 2 4 T4 10 W n E п a yi 1700 106 1550 МПа; 23 1 1700 2 2 105 ( DT' ) 2 4 lТП qн qм 2 2 63 10 6 0,4 10 3 4,38 10 3 м 3 ; 2 2 0,00438 0,348с; 1550 10 6 8,1 10 12 63 10 6 0,61 154,3 7,96; 2 14,63 106 8,1 10 12 i 1 k6 qнk нэс n 2 pн a yi i 1 14 k7 q мk м n 2 pн a yi 0,4 10 3 12,56 6,83. 2 14,63 106 8,1 10 12 i 1 Введем относительный параметр регулирования ' ( t) / н , тогда при расчетном значении ε(t)=εн=0,61, ε'=1 После вычисления постоянных коэффициентов система уравнений принимает вид: d M э (t ) M э (t ) 56,87 56,87 н (t ); dt d н (t ) 0,23 M э (t ) 1,03 p н (t ) ' ; dt d м (t ) 0,0019 p н (t ) 0,8M э (t ) dt d p (t ) 0,348 н p н (t ) 7,96 н (t ) '6,83 м (t ) 0. dt 0,04 Зададим начальные значения входных факторов k с 1и ε'=1. Приравнивая производные к нулю, определим начальные параметры: но н 154,3 0,982 ; эс 157 M эо 56,87 56,87 0,982 1,02 ; p но 1,07; мо 1 1 (7,96 м о p м о ) (7,96 0,982 1,07) 0,987 ; 6,83 6,83 Закон измерения усилия сопротивления приведенный к выходному звену гидромотора: M cp при t 0 В динамике - M(t) 0,8 M cp при t 0 Параметр регулирования примем ε = 1, тогда получим следующие графики: Пример программы 15 P t ,Wн t ,Wм t ,M t 2.5 2.0 1.5 1.0 0.5 0.2 0.4 0.6 0.8 1.0 t 0.5 График 1 Совмещенные характеристики. 16