ВАРИАЦИОННО-СТРУКТУРНЫЙ МЕТОД РАСЧЕТА
реклама

УДК 539.3
РАСЧЕТ ОБОЛОЧЕЧНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
НА ОСНОВЕ RVR-МЕТОДА
В.А. Сало, доцент, д.т.н., Военный институт ВВ МВД Украины
Аннотация. Предложен RVR-метод определения напряженно-деформированного
состояния оболочек с отверстиями. Используемый метод основан на вариационном
принципе Рейсснера, методе И.Н.Векуа, теории R-функций, общих уравнениях трехмерной теории упругости и алгоритме двусторонней оценки точности приближенных решений смешанных вариационных задач. Эффективность метода показана на
конкретном примере.
Ключевые слова: вариационный принцип, оболочка, концентрация напряжений.
Введение
Несмотря на накопленный в научной литературе
огромный материал расчетов различных оболочек, большинство из существующих методов их
исследований приводят к расчетным моделям,
которые не всегда позволяют обосновать выбор
конструктивных параметров оболочек с отверстиями. Очевидно, существенный прогресс в
достижении конкретных и достоверных результатов решения в пространственной постановке
краевых задач теории оболочек невозможен без
использования основных соотношений трехмерной теории упругости и привлечения современных быстродействующих ПЭВМ. В этой связи
актуальна потребность в создании достаточно
универсальных и алгоритмически простых для
численной реализации методов расчета ослабленных отверстиями оболочек произвольной
толщины.
последовательностью решений двумерных задач.
В монографии [1] автором даны классификация и
обстоятельный анализ известных в научной литературе уточненных теорий оболочек, рассмотрено современное состояние проблемы определения
концентрации напряжений в упругих оболочках с
отверстиями, а также предложен разработанный,
теоретически обоснованный и численно реализованный автором эффективный метод решения
краевых
задач
определения
напряженно–
деформированного состояния статически нагруженных оболочек (в частности, пластин) с отверстиями. Метод основан на использовании смешанного вариационного принципа Рейсснера,
метода И.Н. Векуа, теории R–функций и общих
уравнений пространственных задач математической теории упругости. Изложенный в монографии [1] метод можно использовать при выполнении расчетов упругих оболочек с одним или несколькими, периодическими или двоякопериодическими системами отверстий.
Анализ публикаций
Цель и постановка задачи
Оценка прочности и жесткости упругих оболочек
предполагает выполнение расчета их напряженно–деформированного состояния на основе решений соответствующих краевых задач теории
упругости. К настоящему времени построено
большое количество разнообразных и нередко
противоречащих друг другу вариантов уточненных теорий оболочек, однако их обилие создает
определенные затруднения в выборе и практическом применении конкретной модели оболочки.
Для расчета оболочек средней толщины и оболочек толстостенных необходимо привлекать трехмерную теорию упругости или обобщенные теории оболочек, основанные на замене решения
трехмерной задачи теории упругости регулярной
В приводах современных машин в качестве средства управления и улучшения динамических характеристик нередко применяются гидрообъемные передачи. Одним из основных элементов
гидромотора является его корпус – толстостенное
цилиндрическое тело с периодической системой
соосно расположенных цилиндрических полостей. При работе машины масло, находящееся под
давлением в полости отверстий, вызывает на их
поверхности равномерно распределенную нагрузку интенсивности q. В гидрообъемных машинах давление масла достигает высоких значений, и фактор концентрации напряжений около
отверстий может существенно влиять на несу-
щую способность конструкции, поэтому при
проектировании гидромотора возникает потребность исследования его корпуса на прочность.
Покажем эффективность использования RVRметода [1] в задаче расчета корпуса гидромотора.
Введем цилиндрическую систему координат
{ r , ϕ , z } . Так как полости отверстий нагружены
силами, не изменяющимися вдоль оси корпуса и
перпендикулярными к этой оси, то в этом случае
часть корпуса, удаленная от торцов, подвергается
плоской деформации, а перемещение всех точек
деформированного тела происходит в плоскостях
( r , ϕ ) – в сечениях, перпендикулярных к оси z
цилиндрического тела, то есть
ε z = 0; γ rz = 0; γ ϕz = 0; ⎫⎪
⎬
σ rz = 0; σϕz = 0.
⎪⎭
Внешняя и внутренняя поверхность толстостенного цилиндра (корпуса гидромотора) свободны
от внешних напряжений, а поверхности цилиндрических полостей (круговых отверстий радиуса
R2 ) нагружены равномерно распределенным
давлением интенсивности q. Таким образом, граничные условия исследуемой плоской задачи
будут следующими:
σr = 0, σ r ϕ = 0 на
σn = − q , σ τ = 0 на
Γ 0 и Γ 1 ;⎫⎪
⎬
Γ2.
⎪⎭
(3)
Кроме того, на граничной поверхности, определяемой уравнением ϕ=γ, должны выполняться
условия периодичности
(1)
uϕ = 0, σrϕ = 0.
(4)
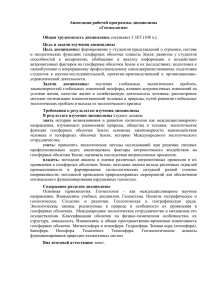
Рассмотрим в полярной системе координат
{ r , ϕ } с внешним и внутренним круговыми кон-
Нормальные σn и касательные στ напряжения на
границе Γ 2 связаны с радиальными σr , окруж-
турами радиусов R и R1 упругую область, ослабленную периодической системой N круговых
отверстий радиуса R2 (рис. 1).
следующими зависимостями:
ными σϕ и касательными σrϕ напряжениями
⎫⎪
⎬
σ rϕ , ⎪⎭
σn = f12 σr + 2 f1 f 2 σrϕ + f 22 σϕ ;
(
στ = f1 f 2 ( σϕ − σ r ) + f − f
r
M
f1 =
ψ
A B
R2
R1
Γ1
02 C D
R
Γ0
Пусть OO2 = a . Расчет упругой области сводится
из соображений симметрии к исследованию пе( 0 ≤ ϕ ≤ γ , где
риодического участка Ω
γ = π N ). Разобьем границу области Ω на элементы Γ i ( i = 0 , 2 ), которые зададим функциями
Γi
= 0 ):
2
1
⎛r⎞
ω0 = 1 − ⎜ ⎟ ; ω1 = 2 r 2 − R12
R
⎝R⎠
1 2
ω2 = 2 r − 2ra cos ϕ + a 2 − 1.
R2
(
(5)
(
)
⎬
⎪
⎪⎭
(6)
⎡ ( j + 1) πϕ ⎤ ⎫
⎛ j πϕ ⎞
C j = cos ⎜
⎥ ;⎪
⎟ ; S j = sin ⎢
γ
⎝ γ ⎠
⎣
⎦ ⎪
⎪⎪
ω0 ω1
m = i ( n2 + 1) + j + 1; Φ r =
;⎬
ω0 ω1 + ω2 ⎪
⎪
ω
1
0 ω1 S 0
; Φ rϕ =
; ⎪
Φϕ =
ω0 ω1 S0 + ω2
1 + ω2
⎪⎭
σψ = f 22 σr − 2 f1 f 2 σr ϕ + f12 σϕ .
(7)
(8)
Представим удовлетворяющие условиям (3) и (4)
радиальное ur , окружное uϕ перемещения и
⎫
) ;⎪⎪
R2 ∂ω2
R ∂ω2
; f2 = 2
.
2 ∂r
2 r ∂ϕ
Введем обозначения
Γ2
Рис. 1. Исследуемая периодическая область Ω
ωi ( ωi
)
Ω
γ
0
2
2
где направляющие косинусы f1 и f 2 нормали n
к контуру Γ 2 определяются выражениями
q
ϕ
2
1
(2)
напряжения в виде ( Pk – полиномы Лежандра)
n1 n2
n1 n2
⎫
ur = ∑ ∑ urm Pk C j ; uϕ = ∑ ∑ uϕm Pk S j ;⎪
k =0 j =0
k =0 j =0
⎪
n1 n2
⎛ 2
⎞ ⎪
2
σr = Φ r ⎜ − f1 q + f 2 ∑ ∑ σ m Pk C j ⎟ + ⎪
k =0 j =0
⎝
⎠ ⎪
n1 n2
⎪
+ω0 ω1ω2 ∑ ∑ σrm Pk C j ;
⎪
k =0 j =0
⎪
⎪
n1 n2
⎛ 2
⎞
⎪
σϕ = Φ ϕ ⎜ − f 2 q + f12 ∑ ∑ σ m Pk C j ⎟ + ⎬ (9)
k =0 j =0
⎝
⎠ ⎪
n1 n2
⎪
+ω2 ∑ ∑ σϕm Pk C j ;
⎪
k =0 j =0
⎪
n1 n2
⎛
⎞ ⎪⎪
σr ϕ = − f1 f 2 Φ r ϕ ⎜ q + ∑ ∑ σ m Pk C j ⎟ +
k =0 j =0
⎝
⎠ ⎪
⎪
n1 n2
⎪
+ω0 ω1ω2 ∑ ∑ σ rϕm Pk S j .
⎪⎭
k =0 j =0
После подстановки структур (9) в вариационное
уравнение Рейсснера задача сводится к решению
системы линейных алгебраических уравнений
относительно постоянных urm , uϕm , σrm , σϕm ,
σ r ϕm и σm , по значениям которых определяются
перемещения, напряжения, а также нормальное
напряжение σψ (8) на границе Γ 2 .
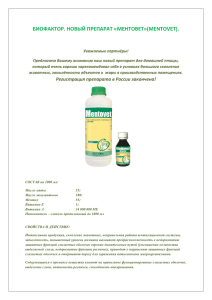
Численная реализация задачи
Численная реализация задачи выполнена для
изотропного ( E = 196, 2 ГПа ; ν = 0, 3 ) корпуса
гидромотора с параметрами: a = 46,5 мм ;
R = 65 мм ; R1 = 28 мм ; R2 = 13, 75 мм .
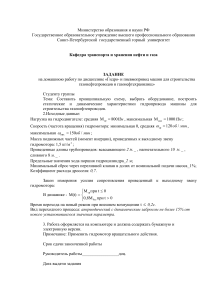
12.5
13.5
q
11.5
R2
B
02
Γ2
С
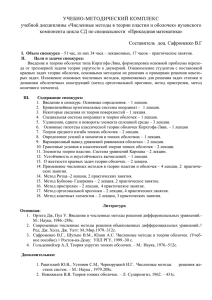
σ% = σψ q . В табл. 1 для характерных точек исследуемой области Ω представлены найденные
при различных значениях межцентрового расстояния a и радиуса R2 кругового отверстия
безразмерные приведенные напряжения σ% .
Таблица 1 Значения приведенного напряжения
a , мм
45
49.5
R2 , мм
11.5
13.75
11.5
13.75
σ% A
1.875
3.007
1.061
1.963
σ% B
1.288
0.542
1.371
2.265
σ% max
2.784
5.867
3.070
6.637
σ% C
2.322
3.727
2.436
6.637
σ% D
1.584
3.312
3.118
9.750
Выводы
Из полученных результатов следует, что напряженное состояние корпуса гидромотора существенно зависит от размеров концентратора и от его
расположения в исследуемой области. Так, при
изменении величины радиуса R2 от 11.5 мм до
13.75 мм максимальное напряжение σ% max , которое возникает на контуре Γ 2 отверстия при
ψ = 65° ÷ 85° , увеличивается почти в два раза, а
уровень напряжений σ% при этом уменьшается в
точке B ( ψ = 0 ) и увеличивается в точке C
( ψ = 180° ). При увеличении межцентрового расстояния a и соответственно уменьшении перемычки CD (рис. 2) окрестность точки D становится не менее напряженной, чем контур Γ 2
отверстия. Полученные результаты в виде установленных зависимостей напряженного состояния корпуса гидромотора от размеров отверстий
и от их расположения в расчетной области, использованы при проектировании гидромотора.
Литература
1. Сало В.А. Краевые задачи статики оболочек с
отверстиями. – Харьков, 2003. – 216 с.
Рис. 2. Распределение напряжения σ% на контуре
отверстия Γ 2
Рецензент: В.Г. Солодов, профессор, д.т.н.,
ХНАДУ.
На рис. 2 штриховыми линиями показано (числа
возле графиков соответствуют значениям радиуса
R2 ) распределение приведенного напряжения
Статья поступила в редакцию 4 марта 2005 г.