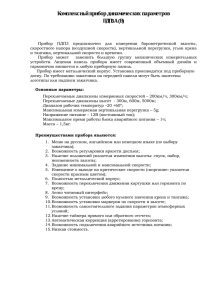
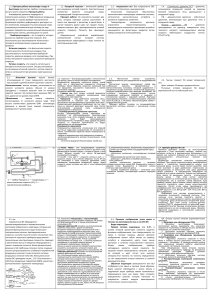
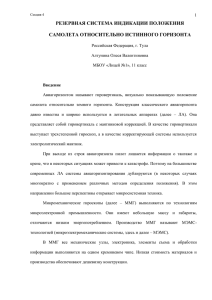
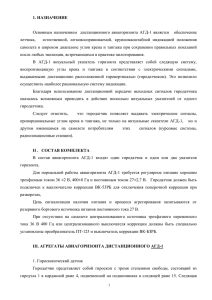
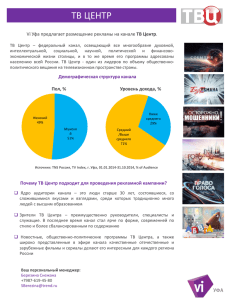
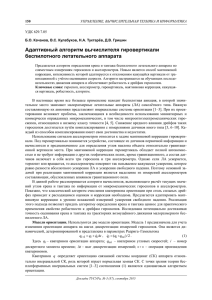
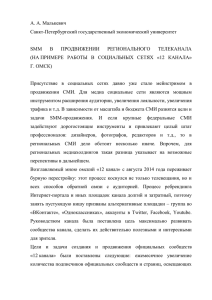
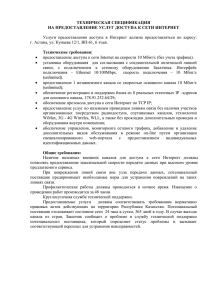
Лабораторная работа «Автопилот АП-28Л1» Цель работы – изучить назначение, основные технические данные, комплектность, конструктивные особенности и реализуемые законы управления автопилота АП-28Л1. – приобрести практические навыки определения статических коэффициентов передачи сервоприводов АП по каналам крена, тангажа и направления. – ознакомиться с особенностями функционирования АП в различных режимах работы. Назначение автопилота АП-28Л1 Автопилот АП-28Л1 предназначен для автоматического пилотирования пассажирских самолетов и обеспечивает: – стабилизацию углового положения самолета в пространстве относительно трех осей; – стабилизацию барометрической высоты полета самолета; – полет самолета по локсодромии от сигнала гироиндукционного компаса ГИК-1; – автоматический полет самолета по ортодромии от сигнала гирополукомпаса ГПК-52АП; – выполнение координированного разворота с углами крена до 3030; – выполнение автоматического доворота на углы до ±1200 при управляющем сигнале от задатчика курса ЗК-2, который является одновременно указателем ГПК-52АП; – автоматическое триммирование РВ при включенном АП с сигнализацией наличия и направления усилия на штурвальной колонке; – возможность управления самолетом с помощью штурвала, колонки и педалей при нажатии кнопки совмещенного управления с переводом АП в режим согласования на это время; – возможность отключения РМ высоты с переводом канала тангажа в режим согласования, что может потребоваться при заходе на посадку. Включение АП не требует предварительной настройки и может производиться на любых курсах и при любых положениях продольной и поперечной осей самолета в зоне углов 280 по крену и 200 по тангажу относительно истинного горизонта. Основные технические данные АП Время готовности к включению – 100с. Зона углов, в пределах которых возможно включение и управление АП: по крену – 280; по тангажу – 200. Скорость управления: по крену – 6 град·с-1; по тангажу – 0,7 град·с-1. Скорость приведения к горизонту: по крену – 4 град·с-1; по тангажу – 0,7 град·с-1. Максимальные моменты, развиваемые РМ: крена – 1,5 кг·м; тангажа – 1,2 кг·м; направления – 1,5 кг·м. Чувствительность автотриммера при приложении усилий к штурвалу – 2,6 кг·м. Время задержки срабатывания сигнализации автотриммера – 8с. Источники электрического питания: по постоянному току (бортовая сеть) – +27В; потребляемая мощность – 125Вт; по переменному току (бортовая сеть трехфазного напряжения) – 36В 400Гц (не более 3А в каждой фазе); бортовая сеть трехфазного напряжения – 115В 400Гц; (потребляемая мощность стабилизированного напряжения не более 320В·А); (потребляемая мощность нестабилизированного напряжения не более 800В·А). Масса АП – 58кг. АП-28Л1 Комплектность и функции, выполняемые основными агрегатами АП Автопилот АП-21Л1 состоит из отдельных агрегатов, соединенных на самолете общей электрической схемой. В комплект автопилота АП-28Л1 (рис. 1) входят: – блок триммирования БТ-1426А – 1 шт.; – блок усилителей фазочувствительных (БУФ) 5185ТБ – 1 шт.; – триммерная машина (ТМ) ТМ-5061Б – 1 шт.; – пульт управления ПУ-1248 – 1 шт.; – агрегат управления (АУ) АУ-1056 – 1 шт.; – корректор высоты (КВ) КВ-11 – 1 шт.; – блок реле (БР) БР-1444 – 1шт.; – блок связи (БС) с курсовой системой БС-1408А – 1 шт.; – задатчик курса ЗК-2 – 1 шт.; – усилитель рулевых машин (УРМ) УРМ-5026Б – 1 шт.; – рулевые машины РМ-5023Б (крена, тангажа, направления) – 3 шт.; – датчик предельных отклонений руля (ДПОР) ДПОР-1158А – 2 шт.; – датчик угловых скоростей ДУС-970В – 1 шт.; – кнопки отключения 512 вариант 2 – 2 шт. 4 5 6 7 3 8 2 9 1 13 12 11 10 Рис. 1. Комплект АП-28Л1: 1. – блок триммирования БТ-1426А; 2. – блок усилителей фазочувствительных 5185ТБ; 3.– триммерная машина ТМ-5061Б; 4. – пульт управления ПУ-1248; 5. – агрегат управления АУ-1056; 6. – корректор высоты КВ-11; 7. – блок реле БР-1444; 8. – блок связи с курсовой системой БС1408А; 9. – задатчик курса ЗК-2; 10. – усилитель рулевых машин УРМ-5026Б; 11. – рулевые машины РМ-5023Б (крена, тангажа, направления); 12. – датчик предельных отклонений руля ДПОР1158А; 13. – датчик угловых скоростей ДУС-970В. В качестве трехстепенного датчика углов крена и тангажа применяется авиагоризонт дистанционный АГД-1, в качестве датчиков угла курса – гироиндукционный компас ГИК-1 и гирополукомпас ГПК-52 АП. Указанные системы являются штатным оборудованием самолёта и в комплект АП-28Л1 не входят. АП-28Л1 Автопилот является системой автоматического управления (САУ) полетом самолета и осуществляющей автоматическое управление угловыми движениями самолета соответственно по крену, тангажу и направлению. АП состоит из трех самостоятельных сервоприводов: канала крена, канала тангажа и канала направления. Каждый канал АП управляет своей аэродинамической поверхностью самолёта: по крену – элеронами, по тангажу – рулём высоты (РВ), по направлению – рулём направления (РН). По роду выполняемых функций составные части системы «самолет–автопилот» могут быть разбиты на следующие группы: – чувствительные элементы (АГД-1, ДУС-9702В, ГПК-52АП, ГИК-1, КВ-11); – усилительные элементы (АУ1056, УРМ 5026Б); – силовые элементы (РМ-5023Б, ТМ-506Б0); – элементы управления (ПУ-1248, ЗК-2); – элементы обратной связи (ДОС РМ5023Б); – корректирующие и коммутационные элементы (БР-1444, БС-1408А); – источники питания (бортовые источники питания: +27В, 36В 400Гц, 115В 400Гц). На рис. 2 изображена функциональная схема, отражающая взаимодействие элементов системы «самолет–автопилот». x ~ ( , ) АГД-1 ~ ~ x ФЧВ ТГ МУ ЛУ Д УРМ ЛУ Д УРМ ДОС элероны РМ крена БУФ МС ( x , y , z ) крена ДУС разворот ПУ ( ) ~ ГПК-52 УРР доворот ЗК-2 z ~ (мм.вод.ст.) ФЧВ z КВ-11 ТГ МУ ДОС РВ РМ тангажа БТ ТМ МС тангажа спуск - подъем y ~ ФЧВ y ТГ МУ ЛУ Д УРМ ДОС РН РМ направления МС ( ) ГИК-1 ~ направления БС доп ~ АУ-1056 АП-28Л1 My САМОЛЕТ Рис. 2. Функциональная схема автопилота АП-28Л1. Mz Mx триммер АП-28Л1 Блок датчиков угловых скоростей ДУС-970В предназначен для измерения угловых скоростей вращения самолета относительно трех его координатных осей. Блок состоит из трех независимых измерителей угловых скоростей, использующих гироскопы с двумя степенями свободы. Корректор высоты КВ-11 предназначен для выдачи в АП сигнала отклонения самолета от заданной барометрической высоты полета ( ) . Блок усилителей фазочувствительных БУФ-5185Б предназначен для усиления сигналов переменного тока, поступающих с сельсинов датчиков АГД-1 (по крену и тангажу) и преобразования их в сигналы постоянного тока. Агрегат управления АУ-1056 представляет собой устройство, в котором сосредоточены элементы АП, обеспечивающие: – электрическую связь составных частей комплекта АП между собой; – преобразование, суммирование и усиление управляющих сигналов; – автоматическое согласование АП без предварительных настроек; – необходимые переключения и блокировки на всех режимах работы АП. Для удобства эксплуатации и быстрой замены отказавших элементов агрегат управления выполнен по блочному принципу. Элементы агрегата управления по их принадлежности к соответствующим каналам размещены в трех самостоятельных кассетах агрегата – крена, тангажа и направления. Элементы агрегата, имеющие общее назначение (реле включения и блокировок) и ответные части штепсельных разъемов кассет, смонтированы на литом алюминиевом основании. Основание с кассетами с помощью быстросъемных зажимов установлено на подставку с демпфированными амортизаторами, обеспечивающими виброизоляцию элементов агрегата в диапазоне частот от 10 до 300 Гц. Каждая кассета агрегата представляет собой литой алюминиевый каркас, на котором установлены реле, резисторы и подстроечные потенциометры, а элементы, обеспечивающие преобразование, суммирование, усиление и автоматическое согласование, собраны в специальные блочки, соединенные с кассетой с помощью межблочных разъемов. В кассетах АУ установлены следующие блоки: – механизм согласования (МС); – фазочувствительный выпрямитель (ФЧВ); – ламповый усилитель (ЛУ); – магнитный усилитель (МУ); – детектор (Д); – усилитель рукоятки РАЗВОРОТ (УРР) (только в кассете крена). Все потенциометры настройки АУ, выведенные на лицевую панель, снабжены шкалами с делениями и надписями, поясняющими их назначение, а на осях потенциометров закреплены индексы. Усилитель рулевых машин УРМ 5026Б предназначен для усиления сигнала постоянного тока, поступающего с выхода АУ на вход магнитного усилителя, и преобразования его в напряжение переменного тока, питающее управляющую обмотку двухфазного асинхронного двигателя ДГ-30 рулевой машинки. Рулевая машина РМ 5023Б является исполнительным агрегатом АП и предназначена для механического перемещения элеронов, РВ и РН и для удержания их в заданном положении. Блок триммирования БТ-1426А предназначен для измерения значения и знака напряжения на РМ РВ и выдачи сигналов включения ТМ и световой сигнализации нестриммирования. Триммерная машина ТМ-5061Б предназначена для управления триммерами РВ самолета. Пульт управления ПУ-1248 предназначен для включения и выключения питания АП, световой индикации режимов АП, выполнения основных операций по управлению (разворот, спуск-подъем, приведение к горизонту, доворот, переключение с гирополукомпаса (ГПК-52) на гироиндукционный компас (ГИК-1), включение автотриммера), а также настройки центровки АП. Задатчик курса ЗК-2 предназначен для дистанционного воспроизведения показаний текущего курса гирополукомпаса ГПК-52 АП, а также для формирования и выдачи в АП заданного угла разворота (доворота). АП-28Л1 Блок связи с курсовыми системами БС-1408А предназначен для связи АП с датчиками курса, имеющими трехпроводной потенциометрический или сельсинный выход и, совместно с датчиками курса обеспечивает: – выдачу в АП сигнала постоянного тока, пропорционального отклонению самолета от стабилизируемого курса ; – выдачу в АП дополнительного сигнала переменного тока при отклонении самолета от стабилизируемого курса, который использован для получения астатической стабилизации по курсу; – обнуление сигналов курса при согласовании АП, выполнении координированных разворотов при крене более 3 – 50 и быстрого согласования курсовых систем. Блок связи работает в двух основных режимах: – в режиме стабилизации, при котором блок связи выдает в АП сигнал, пропорциональный отклонению самолета от заданного стабилизируемого курса, (кроме того, при появлении статической ошибки стабилизации курса блок связи выдает дополнительный сигнал переменного тока в механизм согласования канала направления, который используется для получения астатической стабилизации по курсу); – в режиме согласования, при котором цепи съема сигналов в АП разомкнуты, а следящая система блока связи постоянно отрабатывает (обнуляет) сигнал изменения текущего курса, стремясь получить на выходе сигнал равный нулю. Блок реле БР-1444 предназначен для коммутации цепей АП. Датчик предельных отклонений руля ДПОР-1158А предназначен для отключения АП при отклонениях РВ и элеронов на углы, больше предельных. Режимы работы АП-28Л1: Согласно выполняемым функциям автопилот АП-28Л1 работает в следующих режимах: – режим согласования; – режим стабилизации; – режим управления; – режим автоматического триммирования руля высоты; – режим совмещенного управления. Режим согласования Режим согласования – это режим автоматической подготовки АП к включению силовой части. Перед включением АП может быть такое положение, когда сигналы с чувствительных элементов (датчиков угла, угловой скорости и обратной связи) в сумме не равны нулю. В таком случае при включении силовой части АП на сервоприводы поступили бы управляющие сигналы, что привело бы к перекладке рулей и изменению траектории полета. Чтобы избежать этого явления на вход магнитного усилителя (МУ) агрегата управления (АУ) подается сигнал, вырабатываемый механизмом согласования (МС). Этот сигнал должен быть равен по значению и противоположен по знаку суммарному сигналу от датчика угла и обратной связи. Благодаря этому результирующий сигнал на выходе МУ становится равным нулю, двигатели рулевых машин АП останавливаются, что и обеспечивает безрывковое включение силовой части АП с допустимыми перемещениями рулей и сохранение траектории полета. Как видно из структурной схемы канала крена (рис.3) в режиме согласования МС компенсирует сигнал текущего крена, поступающий с АГД-1 и потенциометра обратной связи РМ крена. Структурная схема канала тангажа (рис. 4) аналогична структурной схеме канала крена, отличие заключается в том, что в режиме согласования МС канала тангажа компенсирует не только сигнал угла и обратной связи РМ тангажа, но и сигнал с КВ-11. В канале направления (рис. 5) в режиме согласования МС обнуляет только сигнал обратной связи РМ (запоминает положение руля), сигнал же текущего угла курса с ГИК-1 в режиме согласования обнуляется механизмом согласования блока связи БС. АП-28Л1 Режим стабилизации В случае отклонения самолета от стабилизируемого положения происходит изменение углов крена, тангажа и направления. Это изменение воспринимается чувствительными элементами и передается далее усилительному и силовому элементам (рис.2). Силовые элементы АП (рулевые машинки) перемещают элероны (РВ, РН) на определенный угол. По мере поворота валов РМ нарастают сигналы обратных связей с потенциометров обратных связей РМ, поступающие на вход МУ агрегата управления со знаком обратным знаку входных сигналов углов с гиродатчиков. В результате этого скорость вращения валов РМ уменьшается. При достижении сигналов обратной связи величин, равных суммарным входным сигналам, вращение валов РМ прекращается, и аэродинамические поверхности оказываются переложенными на величины, пропорциональные суммарным входным сигналам. Отклонение рулевых поверхностей приводит самолет к заданному стабилизированному положению. Для осуществления стабилизации заданной барометрической высоты полета в схему канала тангажа введен корректор высоты КВ-11, вырабатывающий сигнал пропорциональный отклонению самолета от заданной барометрической высоты полета ( ) . Р1-1 X ДУС 970В АГД-1 X ФЧВ 1055 Р3-2 БУФ 5185ТБ МУ 1054 Σ ПУ-1248 Р9-1 Координированный разворот Р10-1 Р9-1 УРМ 5026Б РМ 5023Б-К БР 1444 МС 372Б ГПК-52 ЗК-2 элероны ЛУ 1052 УРР 1053 Сигнал компенсации высоты в канал тангажа Доворот САМОЛЕТ MX Рис. 3. Структурная схема канала крена (положение контактов реле Р1, Р2, Р3, Р9, Р10 на схеме соответствует режиму согласования). Реализуемые законы управления АП-28Л1 по каждому каналу можно записать в следующем виде: – для канала крена – Э К К х х где: Э – отклонение элеронов, град; ( зад ) – отклонение самолета по крену от заданного значения, град; х – угловая скорость самолета по крену, град.∙с-1; К , К х – статические коэффициенты передачи по углу и угловой скорости канала крена. АП-28Л1 – для канала тангажа – В К К z z К где: В – отклонение РВ град.; ( зад ) – отклонение самолета по тангажу от заданного значения, град.; z – угловая скорость самолета по тангажу, град.∙с-1; – отклонение самолета по высоте от заданного значения, мм. вод.ст.; К , К z , К – статические коэффициенты передачи по углу, угловой скорости и высоте канала тангажа; – для канала направления – Н К К y К 2 y доп где: Н – отклонение РН град.; ( зад ) – отклонение самолета по направлению от заданного значения, град.; y – угловая скорость вращения самолета вокруг оси у, град.∙с-1; Тр – передаточная функция фильтра, обеспечивающая задержку постоянного сигТр 1 нала угловой скорости по каналу направления (Тр RC 1,7с ) ; доп – отклонение РН от дополнительного сигнала, зависящего от величины отклонения самолета от заданного курса, град; К , К y – статические коэффициенты передачи по углу и угловой скорости канала направК2 ления. z z ik ip Mz Рис. 4. Структурная схема канала тангажа (положение контактов реле Р1, Р2, Р3, Р9 на схеме соответствует режиму согласования). АП-28Л1 Р1-1 y ДУС 970В y Р4-1 ФЧВ 1055 МУ 1054 Σ ГПК-52 ГИК-1 Р3-1 БУФ 5185ТБ Команда обнуления из канала каена при выполнении разворотов РН ЛУ 1052 Р9-1 УРМ 5026Б РМ 5023Б-Н Р3-2 доп Р2-1 БР 1444 МС 372Б My САМОЛЕТ Рис. 5. Структурная схема канала направления (положение контактов реле Р1, Р2, Р3, Р4, Р9 на схеме соответствует режиму согласования). Передаточные числа автопилота АП-28Л1 приведены в таблице 1. Канал АП Крена Тангажа Направления Наименование передаточных чисел АП и их размерность град(элеронов ) По углу град(самолета) град( элеронов) По угловой скорости градс 1 (самолета) град( элеронов) По ЗК град( ЗК ) град( РВ ) По углу град(самолета) град( РВ) По угловой скорости градс 1 (самолета) град( РВ) По высоте мм.вод.ст. град( РН ) По углу град(самолета) град( РН ) По угловой скорости градс 1 (самолета) Таблица 1. Значение передаточных чисел 1,4 0,75 0,9 1,0 0,5 0,06 1,1 1,1 Отклонение РН за счет слагаемого закона управления К y , К 2 y пропорционально скорости изменения угловой скорости на малых частотах вращения самолета вокруг вертикальной оси и пропорционально угловой скорости вращения самолета на больших частотах. АП-28Л1 Режим управления Режим управления осуществляется с ПУ-1248 с помощью переключателей РАЗВОРОТ, СПУСК-ПОДЪЕМ, ГОРИЗОНТ, АВТОТРИММЕР и совместно с ЗК-2 – ДОВОРОТ. Координированный разворот Выполнение координированных разворотов от рукоятки РАЗВОРОТ осуществляется по принципу управления по положению, т.е. положение рукоятки РАЗВОРОТ соответствует углу крена самолета. Схема формирования управляющего сигнала от рукоятки РАЗВОРОТ показана на рис.6. Как видно из схемы, потенциометр рукоятки РАЗВОРОТ и потенциометр П3 МС образуют мостовую схему, запитанную фазами ~Iф. и ~IIIф. напряжения 36В 400 Гц в диагональ которой включен усилитель У1053. При отклонении рукоятки РАЗВОРОТ мостовая схема оказывается разбалансированной и в её диагонали возникает сигнал рассогласования U вх , который после усиления в усилителе У1053 U вых подается на управляющие обмотки двигателя МС крена. i i Рис. 6. Принципиальная электрическая схема канала крена АП-28Л1 в режимах разворот и горизонт (фрагмент). Двигатель начнет вращаться и поворачивать щетку потенциометра П III механизма согласования до тех пор, пока равновесие моста не восстановится. Щетка потенциометра остановится в отклоненном положении. Угол поворота щетки будет соответствовать углу поворота рукоятки РАЗВОРОТ. Щетки потенциометров П III и Л механизма согласования крена жестко связаны между собой, поэтому одновременно поворачивается и щетка потенциометра Л. При повороте щетки потенциометра Л мост потенциометр Л МС – резисторы Р35, Р36 разбалансируется и с потенциометра П12 на управляющую обмотку суммирующего усилителя МУ1054 (точки 14, 15) будет подаваться управляющий сигнал. Значение этого сигнала будет соответствовать углу поворота рукоятки РАЗВОРОТ, а полярность будет зависеть от направления этого поворота. АП-28Л1 Одновременно с канала крена поступает сигнал на потенциометр П8, с которого снимается сигнал компенсации высоты ( ) на суммирующий усилитель МУ1054 канала тангажа (точки 24, 25) и отклоняет РВ на некоторый угол вверх для предотвращения потери высоты из-за уменьшения вертикальной составляющей подъемной силы. Доворот Для осуществления доворота самолета на желаемый курс необходимо кремальерой развернуть шкалу ЗК-2, установив по неподвижному верхнему индексу новое значение курса. При этом срабатывают реле Р8, Р9, Р10, которые своими контактами подключают питание потенциометра ЗК-2. При повороте шкалы следящая система ЗК-2 отрабатывает сигнал рассогласования и отклоняет при этом движок потенциометра. Потенциометр ЗК-2 и потенциометр П III механизма согласования крена образуют мостовую схему, в диагональ которой включен усилитель У1053. При отклонении движка потенциометра ЗК-2 мостовая схема разбалансируется и в конечном итоге сигнал рассогласования поступит на вход суммирующего МУ (точки 14, 15). Дальнейшая работа схемы осуществляется, как при управлении рукояткой РАЗВОРОТ. Одновременно с канала крена поступает сигнал на потенциометр П8, с которого снимается сигнал компенсации высоты ( ) на суммирующий усилитель МУ1054 канала тангажа (точки 24, 25) и отклоняет РВ на некоторый угол вверх для предотвращения потери высоты из-за уменьшения вертикальной составляющей подъемной силы. Схема формирования сигнала компенсации высоты при развороте (довороте) приведена на рис.6. Спуск-подъем Управление по тангажу осуществляется переключателями СПУСК-ПОДЪЕМ. Фрагмент принципиальной электрической схемы функционирования канала тангажа АП в режимах СПУСК – ПОДЪЕМ и ГОРИЗОНТ представлен на рис. 7. Рис. 7. Принципиальная электрическая схема канала тангажа АП-28Л1 в режиме СПУСКПОДЪЕМ и ГОРИЗОНТ (фрагмент). АП-28Л1 При нажатии на ПУ тумблера СПУСК-ПОДЪЕМ на вход МУ канала тангажа подается сигнал упреждения по цепи: «спуск» («подъем»), Р6 (Р7), ~ Iф., Р6-1 (Р7-1), БР29(30), R22 (23), ~IIIф.), с потенциометра механизма согласования тангажа П12 на вход МУ1054 (точки 14, 15) подается сигнал, вызывающий изменение угла тангажа с постоянной скоростью и действующий до тех пор, пока осуществляется нажатие. Сигнал упреждения идет соответственно по цепи: «спуск» («подъем»), Р6 (Р7), ~ Iф., Г22, БР31, Р6-1 (Р7-1), БР29(30), АУ а (б), ~IIIф., УО «МС», «Т», движки панелей II и III «МС», «Т», П12, 14, 15 МУ1054. Приведение к горизонту При необходимости выровнять самолет по крену и тангажу относительно горизонта на ПУ-1248 нажимается кнопка ГОРИЗОНТ. При этом отключаются обмотки управления двигателя МС канала крена от рукоятки РАЗВОРОТ, подключаются фазы ~Iф. и ~IIIф. к щетке ламельного устройства Г и к управляющим обмоткам двигателя МС канала крена (см. рис. 6). Двигатель МС канала крена начинает вращаться и поворачивать щетки ламельных устройств потенциометров к нулевому положению по цепи: ~Iф., Р4-1, а, П10, движок Г «МС» «К», ламель Г, в (с), ОУ1 (ОУ2). При повороте щетки Л к среднему положению управляющий сигнал с потенциометра П12 начинает уменьшаться. Превышение сигнала , снимаемого с АГД-1, над сигналом с МС приводит к отклонению элеронов, в результате чего самолет выводится из крена. В момент прихода щетки Г на изоляционный участок снимается напряжение с управляющей обмотки двигателя МС канала крена. Двигатель останавливается. При этом щетка потенциометра Л останавливается у нулевого положения. В канале тангажа (рис.7.) после нажатия на ПУ 1248 кнопки ГОРИЗОНТ и срабатывания реле Р4 к обмотке управления механизма согласования тангажа через контакты Р4-1 и Р4-2 подключаются фазы ~IIIф. и ~Iф. И если угол тангажа не равен нулю, т.е. движок ламели Г находится не в среднем положении, то двигатель МС канала тангажа начинает вращаться и одновременно вращать движки ламелей Л и IIIф. С потенциометра П12 на вход МУ-1054 (точки 14, 15) поступает сигнал приведения к нулевому положению. Режим автоматического триммирования При изменении центровки самолета или изменении режима полета необходимо изменить балансировочное положение РВ. При этом на руле высоты появится шарнирный момент и, следовательно, усилие в его тягах. О наличии шарнирного момента на РВ свидетельствует напряжение на обмотке управления двигателя основной РМ, которое подается на вход БТ. Шарнирный момент РВ может быть снят отклонением триммера на соответствующий угол. В автопилоте АП-28Л1 автоматическое триммирование РВ осуществляется с помощью специального привода – электрической триммерной машинки. Режим автоматического триммирования осуществляется включением тумблера АВТОТРИММЕР на ПУ-1248. Функциональная схема автоматического триммирования руля высоты показана на рис. 8. Блок триммирования измеряет значение и знак напряжения управляющего сигнала двигателя РМ РВ. При достижении напряжения определённого значения ТМ с некоторой задержкой времени подключается к источнику питания и отклоняет триммер в сторону компенсации шарнирного момента. Одновременно со срабатыванием ТМ включается световая сигнализация (лампочки «ОТ СЕБЯ» или «НА СЕБЯ» на ПУ-1248), указывающая наличие и направление усилия на РВ и, следовательно, на колонке штурвала. Лампочки сигнализации «ОТ СЕБЯ» и «НА СЕБЯ» подключаются параллельно управляющими обмотками ТМ, и после снятия усилий на штурвале и прекращения работы ТМ лампочки гаснут. АП-28Л1 Рис. 8. Функциональная схема автотриммера АП-28Л1. Режим совмещенного управления Совмещенное управление предусмотрено для того, чтобы в случае необходимости пилот мог легко и быстро взять на себя управление самолетом, пилотируемого АП. Совмещенное управление состоит из кнопки совмещенного управления (СУ), расположенной на штурвале, и реле, находящегося в БТ. Желая воспользоваться совмещенным управлением, пилот берется за штурвал, нажимает кнопку СУ и начинает выполнять нужный манёвр. При этом отключается корректор высоты, размыкается цепь питания муфт рулевых машинок и АП переводится в режим согласования. Во время совмещенного управления, АП, находясь в режиме согласования, обнуляет поступающие с датчиков сигналы, возникающие при эволюциях самолета. После того, как пилот, выполнив манёвр и задав новое угловое положение самолёта, прекращает пользоваться совмещенным управлением и отпускает на штурвале кнопку СУ, обеспечивается автоматическое безрывковое включение АП и происходит автоматическая стабилизация нового углового положения самолёта в пространстве. АП-28Л1 Описание лабораторной установки Общий вид лабораторной установки по снятию статических характеристик и исследованию функционирования автопилота АП-28Л1 представлен на рис. 9. В связи с компактностью размещения, часть блоков входящих в комплект АП-28Л1 (ДУС-970В, БУФ-5185ТБ, БР-1444, БТ1426А, КВ-11, БС-1408А, УРМ-5026Б) не видна. 7 6 5 4 8 3 9 2 10 1 15 14 13 12 11 Рис. 9. Общий вид лабораторной установки исследования АП-28Л1: 1. – установка 63689/051; 2. – тумблер выбора режима работы лабораторного стенда (С–Р–Д); 3. – задатчик курса ЗК-2; 4. – тумблер питания стенда (В0); 5. – пульт управления ПУ-1248; 6. – установка 6368/024А; 7. – установка 63689/025А; 8. – установка 63689/023; 9. – установка 63689/026; 10. – переходник (имитатор бортовой кабельной сети); 11. – агрегат управления АУ-1056; 12. – триммерная машинка ТМ-5061Б; 13. – датчик предельных отклонений руля ДПОР-1158А; 14. – ручки установки валов рулевых машин; 15. – рулевые машины РМ-5023Б (крена, тангажа, направления). АП-28Л1 В состав лабораторной установки входят: – реальный учебный комплект автопилота АП-28Л1; – отдельные устройства комплекта проверочной аппаратуры ПАА-28Л1; – блок коммутации для выбора режима исследования; – переходник (имитатор бортовой кабельной сети) и жгуты, предназначенные для проверки АП в лабораторных условиях. В комплект проверочной аппаратуры лабораторной установки входят: – установка 63689/023 (рис. 9, поз. 8) для проверки приборов блока связи БС-1408 с курсовой системой (КС) и задатчиком курса ЗК-2; – установка 63689/024А (рис. 9, поз. 6) для имитации сигналов датчиков, подаваемых на агрегат управления и проверки агрегата управления АУ-1056; – установка 63689/025А (рис. 9, поз. 7) для проверки агрегата управления АУ-1056 и обнаружения неисправностей в комплекте АП-28Л1; – агрегат питания 63689/026 (рис. 9, поз. 9) для включения и регулировки напряжений +27В и 36В 400Гц; – установка 63689/051 (рис. 9, поз. 1) для преобразования и регулировки напряжения 36В 400Гц в напряжение 115В 400Гц. Подключение комплекта АП-28Л1 к переходнику и проверочной аппаратуре выполнено в соответствии со схемой кабельных соединений, приведенном на рис.11. В качестве имитатора АГД-1; ГПК 52 и ГИК-1 использованы задатчики установки 65689/024А. Исследование автопилота АП-28Л1 Подготовка к работе, подключение и контроль электропитания. Установить тумблеры и переключатели лабораторного стенда в исходное положение, указанное в таблице 2. Таблица 2 Наименование Наименование органа Исходное положение установки управления 1 2 3 Задатчик угла «0» Задатчик угловой скорости «0» Задатчик обратной связи «0» Переключатели: П21, П22, П23 Крайнее левое положение П10, П11, П13, П19 «1» П14 Среднее положение Установка П18 «Вкл.» (1056) 6368/024А Потенциометры центровки: Р24, Р25, Р26 Среднее положение Потенциометры управления: Р15, Р16, Р17 Среднее положение Тумблеры: В4 (Питание АП), В9 «Вкл.» АП-28Л1 Установка 63689/25А Установка 63689/026 Установка 63689/051 Переходник ПУ-1248 ЗК-2 Передняя панель установки Тумблеры: В7, В8 «Откл.» Переключатели: П1, П3 «Откл.» Переключатель П2 Тумблеры: В1, В2 «Крен» «Вкл.» Переключатель П1 «II – I» Тумблеры В1, В2 «Откл.» Аттенюаторы регулировки напряжений: I, II, III Крайнее левое положение Переключатели: П1, П2, П3, П4 Крайнее левое положение Переключатель П5 «Комплект» (выполнено) Тумблер В1 Тумблер В1 Тумблер В2 Переключатель П Тумблер АВТОТРИМ Тумблер ПИТАНИЕ Тумблер ТАНГАЖ Тумблер СПУСК-ПОДЪЕМ Тумблер СТАБИЛИЗАЦИЯ «Вкл.» (выполнено) «Вкл.» (выполнено) «Задержка триммера» (выполн.) «Вкл.» (выполнено) «Откл.» «Откл.» «Откл.» Среднее положение ГПК Рукоятка РАЗВОРОТ Кремальера ЗК Тумблер ВЫБОР РЕЖИМА РАБОТЫ Тумблер В0 (115В 400Гц) Валы РМ (К, Т, Н) Среднее положение «1550» «С» (статические характеристики) «Откл.» «00» Для подачи электропитания лабораторного стенда на передней панели установки тумблер В0 поставить в положение «ВКЛ.» На установке 63689/026 включить тумблер В1, при этом на V1 показание должно быть равно 27В±2,7В. Тумблер В2 поставить в положение 36В 400Гц, при этом загорится лампочка ПРАВ, на V2 показание должно быть равно 36В±2В. Устанавливая переключатель П1 в положение «I – II», «II – III» и «I – III» и вращая аттенюаторы напряжений I, II и III, добиться показаний прибора V2 равное 36В ±2В между фазами. На установке 63С689/024А должна загореться зеленая лампочка Л2, а на пульте управления ПУ-1248 – желтая лампочка ГОТОВ. Снятие статических характеристик канала крена АП-28Л1. Определить статические коэффициенты усиления по углу крена ( ) и угловой скорости крена ( х ) , сняв зависимость углов поворота вала РМ крена от сигналов и x задаваемых на установке 63689/024А. Взявшись рукой за валы РМ выставить их в положение «00». На установке 63С689/024А переключатели П21, П22 и П23 поставить в положение «К» и нажать кнопку ВКЛ. АП, при этом должна загореться лампочка Л2, а на ПУ-1248 зеленая лампочка ВКЛЮЧЕН. АП-28Л1 ПРИМЕЧАНИЕ: Если после включения АП вал РМ крена окажется не в положении «00», то с помощью задатчика обратной связи на установке 63689/024А установить вал РМ крена в положение «00». С помощью задатчика угла установки 63С689/024А установить последовательно значение углов 00; 50; 100; 150; 200; 250, отмечая положения вала РМ крена по угломеру в одну сторону. Вернуть задатчик угла в положение «00». Установить последовательно углы 00; -50; -100; -150; -200; 250, отмечая положения вала РМ крена по угломеру в другую сторону. Вернуть в положение «00» задатчик угла. Результаты проведенных измерений занести в таблицу 3. Таблица 3 Значение задатчика уг-250 -200 -150 -100 -50 00 50 100 150 200 250 ла, град. Угол поворота вала РМЭ, град. К По формуле К i РМ Э , вычислить статический коэффициент усиления по углу крена для n К i i 1 , где: РМ Э – угол поворота вала РМЭ, n – значение датчика угла крена, n – количество измерений. По результатам измерений построить зависимость РМ Э f ( ) . каждого измерения, а затем среднее значение К СР Определение статического коэффициента усиления по угловой скорости x канала крена провести в соответствии с методикой, изложенной выше. При этом с помощью задатчика угловой скорости установить значения x равные: -10; -7,5; -5; -2,5; 0; 2,5; 5; 7,5; 10 (град/с). Результаты проведенных измерений записать в таблице 4. Таблица 4 Значение задатчика угловой скорости, -10 -7,5 -5 -2,5 0 2,5 5 7,5 10 град./сек Угол поворота вала РМЭ, град. K x По формуле К хi РМ э вычислить статический коэффициент усиления по угловой скорох сти крена для каждого измерения, где х - значение задатчика угловой скорости крена, а РМ Э – угол поворота вала РМЭ, m К , где m - количество измерений. По результаm f ( x ) . Затем найти среднее значение К х ср там измерений построить зависимость РМ Э хi i 1 На установке 63689/024А нажать кнопку «Откл. АП» переведя АП в режим согласования, а стрелки задатчиков поставить в положение «00». Взявшись рукой за валы РМ выставить их в положение «00». Снятие статических характеристик канала тангажа АП-28Л1. АП-28Л1 Определить статические коэффициенты усиления по углу тангажа ( ) и угловой скорости тангажа ( z ) , сняв зависимость углов поворота вала РМ тангажа от сигналов и z задаваемых на установке 63689/024А. На установке 63689/024А переключатели П21, П22 и П23 поставить в положение «Т», и нажать кнопку ВКЛ. АП, при этом должна загореться лампочка Л2, а на ПУ-1248 зеленая лампочка ВКЛЮЧЕН. ПРИМЕЧАНИЕ: Если после включения АП вал РМ тангажа окажется не в положении «00», то с помощью задатчика обратной связи на установке 63689/024А установить вал РМ тангажа в положение «00». Руководствуясь вышеизложенной методикой определить: РМ РВ – статический коэффициент усиления по углу тангажа: К i , где РМ РВ - угол пово рота вала РМ; - значение задатчика угла тангажа; n К i – среднее значение статического коэффициента усиления по углу тангажа К ср i 1 n , где n - количество измерений. По результатам измерений построить зависимость: РМ РВ f ( ) . Руководствуясь вышеизложенной методикой определить: – статический коэффициент усиления по угловой скорости z канала тангажа К z РМ РВ z , где z - значение задатчика угловой скорости тангажа. m К – среднее значение статического коэффициента по сигналу z : К z i 1 m zi . По результатам измерений построить зависимость: РМ РВ f ( z ) . На установке 63689/024А нажать кнопку «Откл. АП» переведя АП в режим согласования, а стрелки задатчиков поставить в положение «00». Взявшись рукой за валы РМ выставить их в положение «00». Снятие статических характеристик канала направления АП-28Л1. Определить статические коэффициенты усиления по углу рыскания ( ) и угловой скорости рыскания ( y ) , сняв зависимость углов поворота вала РМ канала направления от сигналов и y задаваемых на установке 63689/024А. На установке 63689/024А переключатели П21, П22 и П23 поставить в положение «Н», и нажать кнопку ВКЛ. АП, при этом должна загореться лампочка Л2, а на ПУ-1248 зеленая лампочка ВКЛЮЧЕН. ПРИМЕЧАНИЕ: Если после включения АП вал РМ канала направления окажется не в положении «00», то с помощью задатчика обратной связи на установке 63689/024А установить вал РМ канала направления в положение «00». Руководствуясь вышеизложенной методикой определить: РМ H – статический коэффициент усиления по углу рыскания: К i , где РМ H - угол пово рота вала РМ; - значение задатчика угла рыскания; АП-28Л1 n К – среднее значение статического коэффициента усиления по углу рыскания К ср i 1 n i , где n - количество измерений. По результатам измерений построить зависимость: РМ H f ( ) . Руководствуясь вышеизложенной методикой определить: – статический коэффициент усиления по угловой скорости y канала направления К y РМ H y , где y - значение задатчика угловой скорости рыскания. m К – среднее значение статического коэффициента по сигналу y : К y i 1 m yi . По результатам измерений построить зависимость: РМ H f ( y ) . На установке 63689/024А нажать кнопку «Откл. АП» переведя АП в режим согласования, а стрелки задатчиков поставить в положение «00». Взявшись рукой за валы РМ выставить их в положение «00». Проверка функционирования АП-28Л1 согласно режимам работы. Проверка работы АП-28Л1 в режиме «согласование». На передней панели установки тумблер выбора режима работы В0 поставить в положение «Р», при этом на установке 63689/024А должна погаснуть лампочка Л2, а на ПУ-1248 – должна погаснуть зеленая лампочка ВКЛЮЧЕН. На ПУ-1248 тумблер ПИТАНИЕ поставить в положение «ВКЛ», при этом на ПУ должна загореться лампочка ГОТОВ. На установке 63689/025А тумблеры П1 и П2 поставить в положение КРЕН. Имитируя воздействие пилотом на штурвал отклонить рукой вал РМ крена на угол 100 – 200 в одну сторону, а затем на тот же угол в другую сторону. Убедиться в работе МС канала крена путем наблюдения за обнулением сигнала крена на выходе агрегата управления по вольтметрам V1 и V2 установки 63689/025А. Вернуть вал РМ крена в положение «00». На установке 63689/025А тумблеры П1 и П2 поставить в положение ТАНГАЖ. Имитируя воздействие пилотом на штурвальную колонку отклонить рукой вал РМ тангажа на угол 100 – 200 в одну сторону, а затем на тот же угол в другую сторону. Убедиться в работе МС канала тангажа путем наблюдения за обнулением сигнала тангажа на выходе агрегата управления по вольтметрам V1 и V2 установки 63689/025А. Вернуть вал РМ тангажа в положение «00». На установке 63689/025А тумблеры П1 и П2 поставить в положение НАПРАВЛЕНИЕ. Имитируя воздействие пилотом на педали отклонить рукой вал РМ направления на угол 100 – 200 в одну сторону, а затем на тот же угол в другую сторону. Убедиться в работе МС канала направления путем наблюдения за обнулением сигнала рыскания на выходе агрегата управления по вольтметрам V1 и V2 установки 63689/025А. Вернуть вал РМ направления в положение «00». Проверка работы АП-28Л1 в режиме «координированный разворот». На ПУ-1248 убедиться в загорании желтой лампочки ГОТОВ. Тумблеры ТАНГАЖ и АВТОТРИМЕР поставить в положение ВКЛЮЧЕН. Включить АП в режим стабилизации углового положения, нажав кнопку ВКЛЮЧЕНИЕ АП. При этом загорится зеленая лампочка ВКЛЮЧЕН, а указатели валов РМ крена, тангажа и направления должны остаться в неизменном положении. ПРИМЕЧАНИЕ: При изменении положения вала РМ тангажа с помощью тумблера СПУСК-ПОДЪЕМ на ПУ-1248 установить вал РМ тангажа в положение «0». АП-28Л1 На ПУ-1248 переключатель РАЗВОРОТ установить в положение Л (левый разворот) на 150 до первого фиксированного положения. При этом будет наблюдаться вращение вала РМ крена и вала РМ тангажа по часовой стрелке. Вал РМ канала направления вращаться не будет. На ПУ-1248 переключатель РАЗВОРОТ установить в положение «0», при этом валы РМ тангажа и крена должны вернуться в исходное положение. На ПУ-1248 переключатель РАЗВОРОТ установить в положение П (правый разворот) на 0 15 до первого фиксированного положения. При этом будет наблюдаться вращение вала РМ крена против часовой стрелки и вращение вала РМ тангажа по часовой стрелке. Вал РМ канала направления вращаться не будет. На ПУ-1248 переключатель РАЗВОРОТ установить в положение «0», при этом валы РМ тангажа и крена должны вернуться в исходное положение. Оценить направление вращения РМ крена и тангажа в обоих случаях. На ПУ-1248 тумблер ПИТАНИЕ поставить в положение «Откл.», при этом зеленая лампочка ВКЛЮЧЕН должна погаснуть. Выставить валы РМ крена, тангажа и направления в положение «0». Проверка работы АП-28Л1 в режиме «доворот». с помощью кремальеры на задатчике курса ЗК-2 задать значение угла доворота –50; на ПУ-1248 тумблер СТАБИЛИЗАЦИЯ поставить в положение РАЗВОРОТ. (При этом будет осуществляться вращение вала РМ крена в сторону заданного доворота, а вал РМ тангажа будет вращаться по часовой стрелке.) По окончании переходного процесса на ПУ-1248 тумблер СТАБИЛИЗАЦИЯ поставить в положение ГПК. Проверка работы АП-28Л1 в режиме «горизонт». з) переключатель РАЗВОРОТ на ПУ-1248 установить в любое положение разворота на 150 до первого фиксированного положения. При этом будет наблюдать вращение валов РМ крена и тангажа. Оценить направление и значение углов поворота валов РМ крена и тангажа; и) на ПУ-1248 нажать кнопку ГОРИЗОНТ (При этом валы РМ крена и тангажа установятся в новое положение). Оценить полученные значения углов поворота валов РМ крена и тангажа; к) после приведения к горизонту переключатель РАЗВОРОТ на ПУ-1248 поставить в положение «0» и нажать кнопку ВКЛЮЧЕН АП. (При этом на ПУ-1248 должна загореться лампочка ВКЛЮЧЕН). Нажать кнопку КВ. (Должна загореться лампочка КВ.) Проверка работы АП-28Л1 в режиме «спуск-подъем». установив на ПУ-1248 тумблер СПУСК-ПОДЪЕМ в положение СПУСК или ПОДЪЕМ, наблюдать за вращением вала РМ тангажа в пределах ±200, не допуская превышения установленных пределов. Наблюдать за работой ТМ и сигнализацией на ПУ-1248; установить с помощью тумблера СПУСК-ПОДЪЕМ вал РМ тангажа в положение «0». Выключение лабораторной установки. На ПУ-1248 тумблеры «ТАНГАЖ» и «ПИТАНИЕ» поставить в положение ОТКЛ, при этом на пульте погаснет лампочка ВКЛЮЧЕН. На установке 63689/026 тумблеры В1 и В2 поставить в положение ОТКЛ. (При этом погаснут лампы Л1 и Л2, а приборы V1 и V2 будут показывать «0»). На передней панели установки тумблер В0 поставить в положение ОТКЛ. Содержание отчета. Отчет должен содержать: – назначение АП и блоков, входящих в комплект; – функциональную схему автопилота АП-28Л1; – режимы работы АП; – законы управления АП по каналам крена, тангажа и направления в режиме стабилизации; АП-28Л1 – таблицы снятия статических характеристик, средние значения коэффициентов и графики зависимостей по каналам крена, тангажа и направления и их производным; – заключение о функционировании АП-28Л1 в рассмотренных режимах управления.