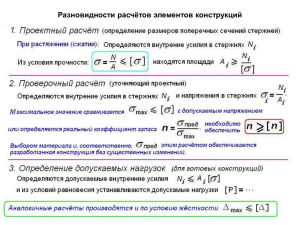
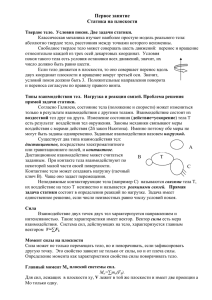
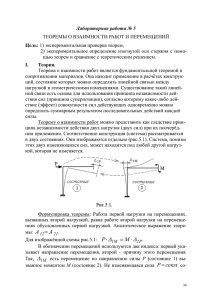
Статически неопределимая система - статически неопределимыми системами будем называть такие системы, у которых при расчете по недеформированному состоянию число неизвестных превышает число уравнений равновесия статики. Лишние связи - наибольшее количество связей, которое при этом условии может быть удалено одновременно, называют количеством лишних связей. Количество лишних связей определяет степень статической неопределимости системы. Различают связи условно необходимые и безусловно (или абсолютно) необходимые. При устранении из заданной системы условно необходимой связи, понижается степень статической неопределимости системы или она превращается в статически определимую, оставаясь при этом геометрически неизменяемой. При устранении же из системы абсолютно необходимой связи так же снижается степень статической неопределимости, но система становится геометрически изменяемой в целом или в отдельной своей части. Классифицируя статически неопределимые системы, можно различать: внешне статически неопределимые; внутренне статически неопределимые. Внешне статически неопределимой называют такую систему, которая имеет только лишние внешние связи, т.е. лишние опорные закрепления. Внутренне статически неопределимой (плоской) называют такую систему, для которой опорные реакции могут быть определены из условий равновесия статики, а в конструкции самой системы имеются лишние связи (элементы), делающие невозможным определение усилий в стержнях традиционными методами, используемыми для статически определимых систем. РАМЫ Л = 𝟐 ⋅ Ш + Со − 𝟑 ⋅ Д, где Д – число дисков, Со – число опорных стержней или связей, Ш – число простых шарниров, соединяющих диски друг с другом. В каждом замкнутом контуре имеются три лишние связи или каждый замкнутый контур трижды статически неопределим. Если в раме имеется K замкнутых бесшарнирных контуров, включая в это число и ломаные стержни с защемленными концами, то число лишних неизвестных будет Л = 𝟑 ⋅ 𝑲. В тех случаях, когда в контуре имеются шарниры, число неизвестных определится из следующих рассуждений. Каждый простой шарнир, т.е. шарнир, соединяющий два стержня, уменьшает количество связей на единицу. Следовательно, при наличии в замкнутом контуре Ш простых шарниров, число лишних связей или степень статической неопределимости составит: Л = 𝟑 ⋅ 𝑲 − Ш. В тех случаях, когда в системе кроме простых шарниров имеются кратные или сложные шарниры, соединяющие “n” стержней, то в формуле под Ш понимается приведенное число шарниров. При этом напомним, что кратный шарнир, соединяющий “n” стержней системы, эквивалентен (n-1) простым шарнирам. Свойства. На основе многочисленных расчетов и теоретического анализа работы статически определимых и неопределимых систем под нагрузкой, установлено следующее: - статически неопределимые сооружения ввиду наличия в них “лишних” связей в сравнении с соответствующими статически определимыми системами более жесткие; - в статически неопределимых системах ввиду их большей связности (в сравнении с соответствующими статически определимыми системами) при той же нагрузке возникают меньшие усилия, что ведет к экономии материала; - нарушение условно необходимых “лишних” связей статически неопределимых систем (или их перенапряжение) не приводит к немедленному разрушению всего сооружения, так как удаление этих связей оставляет систему геометрически неизменяемой. Потеря же связи статически определимой системой делает ее изменяемой; - усилия в статически неопределимых системах зависят от размеров сечений, а при различных модулях упругости – от жесткости элементов или от соотношений между ними. Изменение размеров сечений или жесткостей стержней статически неопределимых систем ведет к изменению усилий в связях и новому распределению усилий во всех элементах системы; - в статически неопределимых системах температурные воздействия, осадка опор, а также неточность изготовления и сборки вызывают отличные от нуля усилия. В статически определимых системах указанные факторы усилий в элементах не вызывают; - усилия в абсолютно необходимых связях (если таковые имеются) всегда могут быть определены из условий равновесия статики, т.е. всегда статически определимы. Методы Если основными неизвестными служат усилия в лишних связях, метод решения называют метод сил. Если основными неизвестными служат те или иные перемещения системы, являющиеся результатом ее деформации, метод расчета называют метод деформаций или метод перемещений. Если основными неизвестными служат частью усилия в лишних связях, а частью перемещения, метод решения называют смешанный метод. Сущность метода сил Одним из основных методов расчета статически неопределимых систем является метод сил. Сущность этого метода заключается в следующем: - устанавливают общее число неизвестных, т.е. число лишних связей или степень статической неопределимости системы; - устраняют (отбрасывают или перерезают) лишние связи, заменяя заданную (ис-ходную) статически неопределимую систему основной статически определимой систе-мой. Устранять можно только условно необходимые связи, чтобы основная система как в целом, так и в отдельных частях не оказалась геометрически изменяемой или мгновенно изменяемой; - действие отброшенных связей заменяем в основной системе силами, которые и принимаем за основные неизвестные x1 , x2 , … , xn ; - для основной системы составляют уравнения совместности перемещений (кано-нические уравнения метода сил), выражающие условия равенства нулю перемещений то-чек приложения каждого из неизвестных по направлению этих неизвестных. Общая форма канонических уравнений метода сил для расчета на действие внешней нагрузки Чтобы деформации основной системы были такими же, как и заданной системы, необходимо, чтобы перемещение точек приложения неизвестных усилий по их направлениям от этих неизвестных и от заданной нагрузки равнялись бы нулю, т.е.: o x1 ( x1 , x2 , x3 , P) 0 ; o x2 ( x1 , x2 , x3 , P) 0 : o x3 ( x1 , x2 , x3 , P) 0 , x o i - перемещение точки приложения неизвестного xi по его направлению от действия сил где x1, x2, x3 и заданной нагрузки P. Используя принцип независимости действия сил, в развернутом виде уравнения запишутся в форме (для краткости, в индексах при перемещениях буква “x” опущена): 011 012 013 01P 0 0 21 0 22 0 23 0 2P ; 0 ; 0. 0 31 0 32 0 33 0 3P В этих выражениях 𝛥0𝑖𝑗 - перемещение в основной системе точки приложения неизвестного xi по его направлению от неизвестного xj , а 𝛥0𝑖𝑃 - перемещение в основной системе точки приложения неизвестного xi по его направлению от внешней нагрузки. Для линейно-деформируемых упругих систем, используя принцип пропорциональности, запишем: 𝛥0𝑖𝑗 = 𝛿𝑖𝑗 ⋅ 𝑥𝑗 , где 𝛿𝑖𝑗 - перемещение точки приложения неизвестного xi по его направлению, вызванное действием силы xj = 1 (удельное перемещение). Тогда в явной форме уравнения запишутся в следующем виде: 11 x1 12 x2 13 x3 01P 0 ; 21 x1 22 x2 23 x3 02 P 0 ; 31 x1 32 x2 33 x3 03P 0 . Эта система называется системой канонических уравнений метода сил. Коэффициенты при неизвестных представляют собой удельные перемещения двух видов: - 𝛿𝑖𝑖 - главные удельные перемещения; - 𝛿𝑖𝑗 - побочные удельные перемещения (𝑖 ≠ 𝑗). Эти перемещения определяются по формуле Мора-Максвелла: а) m l 1 0 ii ___ 0 i M M ds EI ij = ___ 0 2 i l [M ] ds 0 EI 0 1 - главные удельные перемещения всегда M - изгибающий момент в основной системе от x = 1; i ___ l m ___ 0 i положительны. Здесь m ___ 0 i ___ M i0 M 0j EI ds 0, 0 ___ 1 0 б) - побочные удельные перемещения. Здесь изгибающий момент в основной системе от xj = 1; M 0j - ___ iP в) M 0 M P0 i ds 0, 0 EI 1 0 m l грузовые перемещения или свободные члены канонических M0 P - изгибающий момент в основной системе от заданной нагрузки. Таким уравнений метода сил. образом, для определения удельных и грузовых перемещений необходимо в принятой основной системе построить эпюры моментов от единичных лишних неизвестных и от заданной нагрузки. Согласно теореме Максвелла, побочные удельные перемещения обладают свойством взаимности, т.е. 𝛿𝑖𝑗 = 𝛿𝑗𝑖 . Для построения эпюры моментов в заданной системе используем принцип независимости ___ воздействий, справедливый для упругой линейно-деформируемой системы: 𝑀𝑝0 ___ 𝑀10 𝑀𝑃 = 𝑀𝑃0 + ∑𝑛1(𝑀𝑖0 ⋅ 𝑥𝑖 ). Для рассматриваемого примера формула примет вид: 𝑀𝑝 = + ⋅ 𝑥1 + Аналогично запишутся и выражения для поперечных и продольных сил: ___ ___ ___ 𝑀20 ⋅ 𝑥2 + ___ 𝑀30 ⋅ 𝑥3 . ___ 𝑄𝑝 = 𝑄𝑝0 + 𝑄10 ⋅ 𝑥1 + 𝑄20 ⋅ 𝑥2 + 𝑄30 ⋅ 𝑥3 ; ___ ___ ___ 𝑁𝑝 = 𝑁𝑝0 + 𝑁10 ⋅ 𝑥1 + 𝑁20 ⋅ 𝑥2 + 𝑁30 ⋅ 𝑥3 , В общем виде: 𝑛 𝑀𝑃 = 𝑀𝑃0 ___ + ∑ 𝑀𝑖0 ⋅ 𝑥𝑖 ; 1 𝑛 ___ 𝑄𝑃 = 𝑄𝑃0 + ∑ 𝑄𝑖0 ⋅ 𝑥𝑖 ; 𝑁𝑃0 1 ___ ∑𝑛1 𝑁𝑖0 𝑁𝑃 = + ⋅ 𝑥𝑖 . В этих выражениях n – число лишних неизвестных или степень статической неопределимости системы Канонические уравнения для расчета на действие температуры Как уже было сказано выше, в статически неопределимых системах от изменения температуры возникают внутренние усилия 𝑀𝑡 , 𝑄𝑡 и 𝑁𝑡 . Алгоритм расчета статически неопределимой системы от изменения температуры следующий: - определяют число лишних связей или степень статической неопределимости заданной системы; - выбирают основную систему, устраняя лишние связи и заменяя их действием лишних неизвестных; - накладывают на основную систему требования, чтобы она работала как заданная, т.е. чтобы перемещение точек приложения неизвестных усилий по их направлениям от этих неизвестных и от температуры равнялись бы нулю, т.е.: o x1 ( x1 , x2 ,..., xn , t ) 0 ; o x2 ( x1 , x2 ,..., xn , t ) 0 ; ..................... o xn ( x1 , x2 ,..., xn , t ) 0 . - используя принцип независимости воздействий и принцип пропорциональности, составляют канонические уравнения метода сил: 11 x1 12 x2 ... 1n xn 01t 0 ; 21 x1 22 x2 ... 2n xn 02t 0 ; .................................. 31 x1 32 x2 ... 3n xn 03t 0 . Свободные члены канонических уравнений представляют собой перемещения точек приложения лишних неизвестных в основной системе по их направлениям от изменения температурного режима и определяются по формуле: 𝑙 𝛥0𝑖𝑡 = ∑𝑘1 ∫0 𝛼 ⋅ 𝛥𝑡 ℎ ___ 𝑙 ___ ⋅ 𝑀𝑖0 ⋅ 𝑑𝑆 + ∑𝑘1 ∫0 𝛼 ⋅ 𝑡0 ⋅ 𝑁𝑖0 ⋅ 𝑑𝑆 При условии постоянного изменения температуры по длине каждого стержня и однородности материала. Здесь: 𝛼– коэффициент линейного расширения материала; 𝑡0 = (𝑡1 +𝑡2 ) – 2 приращение температуры по оси стержня; 𝑡1 – приращение температуры наружных волокон; 𝑡2 – приращение температуры внутренних волокон; 𝛥𝑡 = 𝑡1 –𝑡2 – перепад температур; Н – высота сечения в плоскости изгиба ώ; На практике слагаемое Δit определяют по формуле 𝛥𝑖𝑡 = ∑𝑚 𝑣=1 𝛼𝑡0 𝜔 𝜔 _ 𝑀𝑖0 _ 𝑁𝑖0 + ∑𝑚 𝑣=1 𝛼 𝛥𝑡 𝜔 _ , 𝐻 𝑀𝑖0 где – площади эпюр нормальных сил и изгибающих моментов на стержне с меняющейся температурой от силового фактора Хi =1; m – число стержней, по длине которых происходит изменение температурного режима. Каждое слагаемое считается положительным, если деформации, вызванные силовым фактором Хi=1 и изменением температурного режима совпадают, и – отрицательным, если эти деформации не совпадают. Канонические уравнения для расчета рам на кинематические воздействия Как уже было сказано выше, в статически неопределимых системах от кинематических воздействий (осадка опор) возникают внутренние усилия 𝑀𝑐 , 𝑄𝑐 и 𝑁𝑐 . Алгоритм расчета статически неопределимой системы от осадки опор следующий: - определяют число лишних связей или степень статической неопределимости заданной системы; - выбирают основную систему, устраняя лишние связи и заменяя их действием лишних неизвестных; - накладывают на основную систему требования, чтобы она работала как заданная, т.е. чтобы перемещение точек приложения неизвестных усилий по их направлениям от этих неизвестных и от осадки опор равнялись бы нулю, т.е.: x1o ( x1 , x 2 ,..., x n , с) 0 ; o x 2 ( x1 , x 2 ,..., x n , с) 0 ; ..................... x no ( x1 , x 2 ,..., x n , с) 0 . - используя принцип независимости воздействий и принцип пропорциональности, составляют канонические уравнения метода сил: 11 x1 12 x 2 ... 1n x n 01с 0 ; 21 x1 22 x 2 ... 2 n x n 02с 0 ; .................................. 31 x1 32 x 2 ... 3n x n 03с 0 . Коэффициенты при неизвестных – главные и побочные удельные перемещения в этих уравнениях определяются по тем же формулам, что и при расчете от нагрузки. Свободные члены канонических уравнений представляют собой перемещения точек приложения лишних неизвестных в основной системе по их направлениям от осадки опор и определяются по формуле: 0 𝛥𝑖с = − ∑𝑤 𝑣=1 𝑟𝑣𝑖 𝑐𝑣 , 0 где 𝑟𝑣𝑖 – реакция в связи, получившей кинематическое воздействие, от силового фактора Хi=1; с𝑣 – величина кинематического воздействия; w – число опорных связей, получивших кинематические воздействия. 0 Реакция 𝑟𝑣𝑖 считается положительной, если ее направление совпадает с направлением кинематического воздействия, и – отрицательной, если не совпадает. Симметричные системы Симметричными будем называть такие системы, которые удовлетворяют следующим условиям: - геометрическая схема системы симметрична, т.е. имеет одну или несколько осей симметрии; - опорные закрепления и узловые сопряжения элементов системы симметричны относительно оси (осей) симметрии; - жесткости элементов, симметрично расположенных относительно оси (осей) симметрии системы, равны. Из этого примера наглядно следует, что: перемножение симметричных и обратно симметричных эпюр всегда дает ноль, или иначе, эпюры являются взаимно нулевыми или ортогональными. Существует три признака ортогональности эпюр: - в симметричных системах симметричные и обратно симметричные эпюры ортогональны; - две эпюры со взаимно безэпюрными участками ортогональны (см. рис. 2.6); - если под центром тяжести одной эпюры расположена нулевая ордината в другой эпюре, то такие эпюры ортогональны (см. рис. 2.7). первый вариант – нагрузка по рис. 2.8a; второй вариант – нагрузка по рис. 2.8b. При загружении системы нагрузкой по первому варианту будем иметь: (в соответствии с признаками ортогональности эпюр: эп. обратно симметричная, а эп. - симметричная). Тогда канонические уравнения примут вид: , а неизвестное x2 обратится в ноль. При загружении системы нагрузкой по второму варианту будем иметь: (в соответствии с признаками ортогональности эпюр: эп. симметричная, а эп. обратно симметричная). Тогда канонические уравнения примут вид: , а в ноль обратится неизвестное x1. Рис.2.6 Выводы приведенного примера выражают собой следующую общую теорему: при действии на симметричное сооружение симметричной нагрузки все обратно симметричные неизвестные обращаются в ноль. При действии на симметричное сооружение обратно симметричной нагрузки в ноль обращаются все симметричные неизвестные. При действии на симметричную систему нагрузки произвольного вида, последнюю всегда можно представить в виде двух вариантов загружений – симметричного и обратно симметричного. Решение системы от каждого загружения отдельно приводит к существенному упрощению вычисления неизвестных канонических уравнений, так как при симметричной основной системе вследствие ортогональности эпюр часть побочных удельных перемещений и свободных членов уравнений обратятся в ноль. Рис.2.8 Общие сведения о неразрезных балках Неразрезной балкой называют конструкцию в виде бруса, перекрывающего два и более пролета и неразрывно связанного с опорами, нигде не прерываясь по длине шарнирами или разрезами. Характерным отличием неразрезной балки от разрезной является то, что нагрузка, расположенная в любом пролете неразрезной балки изгибает ее на протяжении всех пролетов, создавая плавную упругую линию. Неразрезные балки экономичнее разрезных, так как при одинаковой нагрузке значения изгибающих моментов в них меньше. Недостатком неразрезных балок, как, в общем, и всякой статически неопределимой системы, является чувствительность их к неравномерной осадке опор, а также появление дополнительных напряжений при неравномерном изменении температурного режима. Степень статической неопределимости. Основная система Как известно, для обеспечения неподвижности стержня в плоскости требуется три опорных стержня, не пересекающихся в одной точке. Поэтому количество лишних связей неразрезной балки всегда меньше числа ее опорных связей на три единицы. Неразрезная балка может быть статически определимой только в одном случае: когда она имеет три опорных стержня, не пересекающихся в одной точке, не параллельных между собой и разбивающих длину балки на два пролета. При выборе основной системы необходимо стремиться к тому, чтобы канонические уравнения получались наиболее простыми. Такой эффект будет иметь место в том случае, когда максимальное количество побочных удельных перемещений обратятся в ноль. При более удачном выборе основной системы для неразрезной балки можно добиться того, что множество коэффициентов (побочных удельных перемещений) обратится в ноль и при любом количестве пролетов ни одно из уравнений не будет содержать больше трех неизвестных. Замечания по выбору основной системы Выше было отмечено, что в неразрезных балках с шарнирными крайними опорами или с консолями по концам количество неизвестных опорных моментов равно числу промежуточных опор, так как моменты на крайних опорах являются известными величинами. При жестко защемленных крайних опорах неизвестными являются моменты на промежуточных опорах, включая защемленные по концам опоры с примыкающими к ним дополнительными пролетами нулевой длины (см. рис. 3.9). Составляя для каждой промежуточной опоры уравнение трех моментов, получим совместную систему уравнений, решением которой определим неизвестные опорные моменты. Расчет неразрезных балок на внешнюю нагрузку. Уравнение трех моментов Выберем в качестве основной системы совокупность однопролетных шарнирно опертых балок. Такая статически определимая система получается из заданной неразрезной балки (рис. 3.4a) путем устранения жесткой (моментной) связи между сечениями на каждой промежуточной опоре и замене ее шарнирной. Число отброшенных моментных связей обозначим через “n”. За неизвестные x1, x2, …, xn примем изгибающие моменты, действующие в опорных сечениях. Все левые части каждого из уравнений выражают собой суммарный взаимный угол поворота сечения на рассматриваемой опоре, вызываемый всеми лишними неизвестными и заданной внешней нагрузкой. Этот угол взаимного поворота можно назвать также углом перелома упругой линии на соответствующей опоре. Из рис. видно, что момент x1 вызывает перелом упругой линии только на опорах 1 и 2; момент x2 – на опорах 1, 2 и 3; момент x3 – на опорах 2, 3 и 4 и т.д. В свою очередь перелом на опоре 1 зависит только от моментов x1 и x2 и от внешней нагрузки, но не зависит от всех остальных лишних неизвестных. Аналогично, перелом на опоре 2 зависит только от x1, x2, x3 и от внешней нагрузки и.т.д. Следовательно, в каждом из канонических уравнений, кроме первого и последнего, будут фигурировать только по три неизвестных, а в первом и последнем – только по два. 11 x1 12 x2 1P 0 ; 21 x1 22 x2 23 x3 2 P 0 ; ............................. i ,i 1 xi 1 ii xi i ,i 1 xi 1 i , P 0 ; .............................. n 1,n 2 x n 2 n 1,n 1 x n 1 n 1, P 0 . Такие уравнения называются трехчленными, так как каждое из них содержит не более трех неизвестных. При этом, учитывая, что неизвестными являются опорные моменты (x1=M1, xi=Mi , xn1=Mn-1), канонические уравнения называют уравнениями трех моментов. 1 1 1 𝑙 𝑖 𝛿𝑖,𝑖−1 = 2 ⋅ 1 ⋅ 𝑙𝑖 ⋅ 3 ⋅ 1 ⋅ 𝐸𝐼 = 6⋅𝐸𝐼 ; 𝑖 𝛿𝑖,𝑖 = 𝑖 1 2 1 1 2 1 ⋅ 1 ⋅ 𝑙𝑖 ⋅ ⋅ 1 ⋅ + ⋅ 1 ⋅ 𝑙𝑖+1 ⋅ ⋅ 1 ⋅ = 2 3 𝐸𝐼𝑖 2 3 𝐸𝐼𝑖+1 𝑙𝑖 𝑙𝑖+1 = + ; 3 ⋅ 𝐸𝐼𝑖 3 ⋅ 𝐸𝐼𝑖+1 𝛿𝑖,𝑖+1 = 1 1 1 𝑙𝑖+1 ⋅ 1 ⋅ 𝑙𝑖+1 ⋅ ⋅ 1 ⋅ = . 2 3 𝐸𝐼𝑖+1 6 ⋅ 𝐸𝐼𝑖+1 Обозначим через 𝐸𝐼0 жесткость, принятую за единичную. Тогда для i-ой промежуточной опоры каноническое уравнение примет вид: 𝑙𝑖 ⋅𝐸𝐼0 𝐸𝐼𝑖 𝑙 ⋅𝐸𝐼 ⋅ 𝑀𝑖−1 + 2 ⋅ ( 𝑖𝐸𝐼 0 + 𝑖 Величину Рис.3.5. 𝑙𝑖 ⋅𝐸𝐼0 𝐸𝐼𝑖 𝑙𝑖+1 ⋅𝐸𝐼0 ) ⋅ 𝑀𝑖 𝐸𝐼𝑖+1 = 𝜆𝑖 + называют приведенной длиной пролета i. Тогда: 𝜆𝑖 ⋅ 𝑀𝑖−1 + 2 ⋅ (𝜆𝑖 + 𝜆𝑖+1 )𝑀𝑖 + 𝜆𝑖+1 ⋅ 𝑀𝑖+1 = −6𝐸𝐼0 ⋅ 𝛥𝑖𝑃 Это и есть уравнение трех моментов. В том случае, когда балка имеет во всех пролетах один и тот же момент инерции, т.е. жесткость балки по длине постоянна и равна EI, целесообразно принять 𝐸𝐼0 = 𝐸𝐼 и тогда уравнение примет следующий вид: 𝑙𝑖 ⋅ 𝑀𝑖−1 + 2 ⋅ (𝑙𝑖 + 𝑙𝑖+1 )𝑀𝑖 + 𝑙𝑖+1 ⋅ 𝑀𝑖+1 = − 6 ⋅ 𝐸𝐼 ⋅ 𝛥𝑖𝑃 Полученное уравнение составляется для каждой промежуточной опоры. Для определения свободного члена уравнения трех моментов – грузового перемещений 𝛥𝑖𝑃 , необходимо построить эпюры изгибающих моментов в основной системе от единичного неизвестного 𝑥𝑖 = 𝑀𝑖 = 1 и от заданной нагрузки, расположенной в пролетах слева и справа от опоры i. Тогда: ___ ___ 𝛥𝑖𝑃 = 𝜔𝑖 ⋅ 𝑎 𝑖 𝑙𝑖 ⋅𝐸𝐼𝑖 + 𝜔𝑖+1 ⋅ 𝑏 𝑖+1 𝑙𝑖+1 ⋅𝐸𝐼𝑖+1 . Уравнение трех моментов примет вид: i M i 1 2 (i i 1 )M i i 1 M i 1 ___ 6( i a i EI 0 li EI i ___ i 1 b i 1 EI 0 li 1 EI i 1 ) , или: i M i 1 2 (i i 1 )M i i 1 M i 1 ___ 6( i a i li2 ___ i i 1 b i 1 li21 i 1 ) . При равных жесткостях всех пролетов балки: ___ ___ 𝑙𝑖 ⋅ 𝑀𝑖−1 + 2 ⋅ (𝑙𝑖 + 𝑙𝑖+1 ) ⋅ 𝑀𝑖 + 𝑙𝑖+1 ⋅ 𝑀𝑖+1 = −6 ⋅ ( 𝜔𝑖 ⋅ 𝑎 𝑖 𝑙𝑖 + 𝜔𝑖+1 ⋅ 𝑏 𝑖+1 ). 𝑙𝑖+1 Аналитические выражения для изгибающих моментов и поперечных сил в произвольном сечении неразрезной балки Для определения изгибающего момента Mx и поперечной силы Qx в произвольном сечении неразрезной балки необходимо рассмотреть один пролет как простую двухопорную балку, загруженную местной нагрузкой и найденными из решения канонических уравнений опорными моментами (реакциями в лишних связях). В соответствии с принятыми правилами знаков: - изгибающий момент считается положительным, если он вызывает растяжение нижних волокон балки; - поперечная сила считается положительной, если она стремится оба участка балки, разделяемые рассматриваемым сечением, поворачивать по часовой стрелке. Используя принцип независимости воздействий, построим эпюры изгибающих моментов в i-ом пролете от полученного загружения. Для произвольного сечения, отстоящего от левой опоры на расстоянии “x”, аналитическое выражение изгибающего момента примет вид: 𝑀𝑥 = 𝑀𝑥0 + 𝑀𝑖−1 ⋅(𝑙𝑖 −𝑥𝑖 )+𝑀𝑖 ⋅𝑥𝑖 𝑙𝑖 . Формула для поперечной силы в этом же сечении получается дифференцированием выражения изгибающего момента: 𝑄𝑥 = 𝑄𝑥0 + 𝑀𝑖 −𝑀𝑖−1 𝑙𝑖 . Опорная реакция на любой опоре i легко получается следующим способом: нужно вырезать двумя сечениями, расположенными по обе стороны от опоры, бесконечно малый участок балки (см. рис. 3.8) и спроектировать на вертикаль все действующие на него силы. Будем считать положительной реакцию, направленную вверх. Тогда, приняв слева и справа от i-ой опоры поперечные силы положительные, т.е. вращающие рассматриваемую отсеченную часть по часовой стрелке, получим: пр. 𝑅𝑖 = 𝑄𝑖 − 𝑄𝑖лев. = 𝑅𝑖0 + 𝑀𝑖+1 −𝑀𝑖 𝑙𝑖+1 + 𝑀𝑖−1 −𝑀𝑖 . 𝑙𝑖 В этом выражении 𝑅𝑖0 - реакция опоры i, которая возникает в ней в основной системе от заданной внешней нагрузки, расположенной на пролетах i и (i+1). Общие сведения. Метод перемещений Метод перемещений, наряду с методом сил, является одним из основных способов расчета статически неопределимых рам и, в настоящее время, получил большое распространение, особенно при расчете сложных статически неопределимых систем с большим количеством лишних связей, обладающих малой подвижностью узлов: сложные каркасные рамы, фермы с жесткими узлами и т.д. При расчете систем по методу перемещений вводятся следующие предпосылки: продольные (за исключением расчета на температуру) и сдвиговые деформации всех элементов рассматриваемой системы равны нулю. Отличны от нуля только деформации изгиба; полагая деформации изгиба малыми величинами, будем считать, что расстояние между узлами стержня системы до и после деформации остается неизменным; углы поворота всех стержней, сходящихся в жестком узле, равны. Углом поворота называют угол, на который поворачиваются касательные, проведенные к упругим линиям в этом узле. Например, на рис. углом поворота узла A будем называть угол A , общий для всех трех касательных, сходящихся в нем. Первые две предпосылки дают возможность легко определить, могут ли центры узлов рамы перемещаться под действием внешней нагрузки. Если перемещения возможны, то количество независимых геометрических параметров, характеризующих эти возможные перемещения, называют степенью линейной подвижности узлов рамы. При этом, степень линейной подвижности узлов рамы всегда совпадает со степенью изменяемости ее шарнирной схемы. Кроме линейной подвижности, имеет место и угловая подвижность узлов рамы вследствие образования упругих линий при изгибе стержней. Если для какой-либо рамы, нагруженной внешней нагрузкой, удается найти линейные и угловые перемещения узлов, то после этого нетрудно определить и все усилия в стержнях. Именно на этом и основан метод перемещений, в котором за основные неизвестные принимаются линейные и угловые перемещения узлов. Степень кинематической неопределимости системы (число неизвестных по методу перемещений) Степенью кинематической неопределимости называют число всех возможных перемещений узлов заданной системы, знание которых позволяет определить ее деформированный вид и, следовательно, при применении закона Гука – усилия во всех стержнях. Из определения ясно, что общее число неизвестных по методу перемещений “n” будет равно сумме неизвестных углов поворота всех жестких узлов рамы 𝑛уг. и неизвестных линейных перемещений узлов 𝑛л. , т.е. 𝑛 = 𝑛уг. + 𝑛л.. Число угловых перемещений узлов равно числу незакрепленных (свободных) жестких узлов. Для определения числа возможных линейных перемещений узлов рамы или, иначе, степени их линейной подвижности, необходимо заданную систему заменить шарнирно-стержневой моделью путем введения в каждый жесткий узел полного шарнира. Тогда степень геометрической изменяемости полученной шарнирно-стержневой модели и будет выражать число возможных линейных перемещений узлов заданной системы. Для рам степень геометрической изменяемости выражается формулой: 𝑾 = 𝟐 ⋅ У − С − С𝟎 , где: У - число узлов рамы; С – число стержней; С0 – число опорных стержней (связей). Основная система метода перемещений При расчете стержневых систем методом перемещений выбирают основную систему путем введения в заданную систему связей двух типов: - моментных или угловых связей, препятствующих угловым перемещениям свободных жестких узлов заданной системы; - силовых или линейных связей, препятствующих линейным перемещениям узлов шарнирностержневой модели заданной системы в направлении вводимых связей. Канонические уравнения метода перемещений Для приведения работы основной системы к работе заданной, придадим вновь введенным связям 1, 2, …, n в основной системе перемещения zi такие, при которых реакции в этих связях, вызванные перемещениями их самих и внешней нагрузкой, были бы равны нулю, т.е.: R1 ( z1 , z 2 , ..., z n , P) 0 ; R2 ( z1 , z 2 , ..., z n , P) 0 ; ................... Rn ( z1 , z 2 , ..., z n , P) 0 . Используя принцип независимости воздействий, будем иметь: R11 R12 ... R1n R1P 0 ; R21 R22 ... R2 n R2 P 0 ; ....................... Rn1 Rn 2 ... Rnn RnP 0 . R rik z k , где rik - удельная реакция в связи i от смещения С учетом принципа пропорциональности ik связи k на единицу ( z k 1) , окончательно получим: r11 z1 r12 z 2 ... r1n z n R1P 0 ; r21 z1 r22 z 2 ... r2n z n R2 P 0 ; ............................. rn1 z1 rn 2 z 2 ... rnn z n RnP 0 . Это и есть канонические уравнения метода перемещений, которые имеют статический смысл, так как выражают отсутствие реакций во введенных связях основной системы от перемещений самих введенных связей и от заданной нагрузки. Неизвестными этих уравнений являются угловые и линейные перемещения узлов рамы. Коэффициенты при неизвестных – удельные реакции, - целесообразно разделить на два вида: ___ - главные удельные реакции 𝑟𝑖𝑖 = 𝑙 (𝑀 ∗ )2 ∑𝑛𝑖=1 ∫0 𝑖 𝑑𝑆 𝐸𝐼 n l rik ___ * i - всегда положительные; ___ * k M M dS EI i 1 0 - побочные удельные реакции - могут принимать произвольные значения: меньше нуля, равны нулю и больше нуля. Поскольку побочные удельные реакции на основании теоремы Релея обладают свойством взаимности, т.е. 𝑟𝑖𝑘 = 𝑟𝑘𝑖 , то матрица, составленная из коэффициентов канонических уравнений, будет всегда симметрична относительно главной диагонали. Свободные члены 𝑅𝑖𝑃 уравнений представляют собой реакции во вновь введенных связях основной системы от действующей нагрузки и могут быть определены по формуле: ___ M * M P0 RiP i dS EI i 1 0 n ___ l . В приведенных выражениях удельных и грузовых реакций канонических уравнений: ___ - 𝑀𝑖∗ , 𝑀𝑘∗ - изгибающие моменты от единичных значений перемещений, соответственно, связей i и k (𝑧𝑖 = 1 , 𝑧𝑘 = 1) в основной системе метода перемещений; - 𝑀𝑃0 - изгибающий момент от заданной нагрузки в любой неизменяемой, в том числе и статически определимой системе, полученной из основной системы метода перемещений с обязательным исключением связи i. В соответствии с принципом независимости действия сил будем иметь: ___ ___ ___ ___ ___ ___ ___ ___ ___ 𝑀𝑃 = 𝑀1∗ ⋅ 𝑍1 + 𝑀2∗ ⋅ 𝑍2 +. . . +𝑀𝑛∗ ⋅ 𝑍𝑛 + 𝑀𝑃∗ . По этому способу аналогично строятся и эпюры поперечных и продольных сил, т.е. : 𝑄𝑃 = 𝑄1∗ ⋅ 𝑍1 + 𝑄2∗ ⋅ 𝑍2 +. . . +𝑄𝑛∗ ⋅ 𝑍𝑛 + 𝑄𝑃∗ ; 𝑁𝑃 = 𝑁1∗ ⋅ 𝑍1 + 𝑁2∗ ⋅ 𝑍2 +. . . +𝑁𝑛∗ ⋅ 𝑍𝑛 + 𝑁𝑃∗ . Использование свойств симметрии при расчете симметричных систем Ранее было дано определение симметричных систем. При этом было показано, что любую произвольную нагрузку, действующую на симметричную систему, всегда можно разложить на симметричную нагрузку и обратно симметричную (асимметричную). Расчет симметричных систем при действии симметричной и асимметричной нагрузки целесообразно проводить с учетом свойств симметрии. Свойства симметрии симметричной системы напрямую зависят от вида загружения (симметричного или асимметричного). Свойства симметричных систем при действии симметричной нагрузки В симметричных системах при действии симметричной нагрузки деформации и характер распределения внутренних усилий симметричны. Узлы поворота жестких симметричных узлов равны по величине и противоположны по знаку. Линейные перемещения узлов системы возникают только в направлении, параллельном оси симметрии. Линейные перемещения сечений, расположенных на оси симметрии системы, возникают только в направлении оси симметрии. В поперечных сечениях, расположенных на оси симметрии системы, возникают только симметричные внутренние усилия (см. рис. 5.1). Рис. 5.1 Свойства симметричных систем при действии обратно симметричной нагрузки В симметричной системе при действии обратно симметричной нагрузки деформации и характер распределения внутренних усилий обратно симметричный. Узлы поворота жестких симметричных узлов системы равны по величине и по знаку. Линейные перемещения узлов системы возникают только в направлении, ортогональном оси симметрии. Линейные перемещения сечений, расположенных на оси симметрии системы, возникают только в направлении, ортогональном оси симметрии. В поперечных сечениях, расположенных на оси симметрии системы, возникают только обратно симметричные внутренние усилия (см. рис. 5.2). Рис. 5.2 Используя рассмотренные свойства симметричных систем можно получить значительные упрощения их расчета при действии произвольной нагрузки. Метод расчета симметричных систем с учетом свойств симметрии называют комбинированным методом. Комбинированный метод расчета При расчете симметричных систем от действия симметричной нагрузки, целесообразно использовать метод перемещений, а при обратно симметричном загружении – метод сил. Таким образом, расчет симметричных систем при действии произвольной нагрузки целесообразно выполнять по следующему алгоритму: - разложить действующую нагрузку на симметричную и обратно симметричную; - выполнить расчет заданной системы на действие симметричной нагрузки, используя метод перемещений; - выполнить расчет заданной системы на действие обратно симметричной нагрузки, используя метод сил; - выполнив наложение (суммирование) результатов двух расчетов получим окончательный результат расчета на действие заданной на систему нагрузки. Дальнейшее упрощение расчета симметричных систем можно получить путем членения заданной системы на симметричные части. При этом, все симметричные системы можно разделить на два вида: системы, у которых центральные оси сечения не одного из стержней не совпадают с осью симметрии заданной системы (рис. 5.7). системы, у которых центральная ось одного из стержней совпадает с осью симметрии заданной системы (рис. 5.8). Смешанный метод расчета При расчете статически неопределимых систем широко используются и метод сил и метод перемещений. При этом определяющим выбор того или иного метода расчета является число неизвестных – лишних связей по методу сил и возможных угловых и линейных перемещений узлов системы по методу перемещений. Однако для ряда статически неопределимых систем при вычислении усилий в ее элементах оказывается целесообразным совместное использование обоих методов сразу. Выбирая основную систему из заданной путем устранения 𝑛1 лишних связей из верхней части системы, которую удобнее рассчитывать методом сил, и введением 𝑛2 связей в нижней части системы, для которой рациональней использовать метод перемещений, мы получаем основную систему смешанного метода расчета (рис. 6. 1б ). При этом, устранение связей не должно приводить к подвижности звеньев системы, а введение дополнительных связей должно обеспечивать в этой части системы закрепление свободных жестких узлов от угловых и линейных смещений и шарнирных узлов от линейных смещений. Выбранная основная система отличается по своему состоянию от заданной. Для приведения ее работы к работе заданной системы составляем канонические уравнения смешанного метода расчета: 11 x1 12 x2 13* z3 14* z 4 1P 0 ; * * 21 x1 22 x2 23 z 3 24 z4 2P 0 ; r31* x1 r32* x2 r33 z3 r34 z 4 R3 P 0 ; r41* x1 r42* x2 r43 z3 r44 z 4 R4 P 0 . Из уравнений видно, что они имеют смешанный характер: первые два из них (в общем случае их число 𝑛1 ) имеют геометрический смысл, так как выражают отсутствие перемещений точек приложения устраненных связей основной системы; вторые два уравнения (в общем случае их число 𝑛2 ) имеют статический смысл, так как выражают отсутствие реакций во введенных связях основной системы. Неизвестными уравнений являются с одной стороны усилия 𝑥𝑖 , а с другой стороны перемещения 𝑧𝑘 . Коэффициенты при неизвестных представляют собой удельные перемещения и удельные реакции следующих видов: 𝛿𝑖𝑖 - главное удельное перемещение; 𝛿𝑖𝑗 - побочное удельное перемещение; ∗ 𝛿𝑖𝑛 - побочное удельное перемещение точки приложения лишнего неизвестного 𝑥𝑖 по его направлению от смещения связи 𝑛 на единицу (𝑧𝑛 = 1); 𝑟𝑛𝑛 - главная удельная реакция; 𝑟𝑛𝑘 - побочная удельная реакция; ∗ 𝑟𝑛𝑖 - побочная удельная реакция в связи 𝑛, вызванная действием единичного усилия 𝑥𝑖 = 1. Удельные реакции и удельные перемещения обладают свойством взаимности на основании: - первой теоремой Релея: 𝑟𝑛𝑛 = 𝑟𝑛𝑚 ; - теоремы Максвелла: 𝛿𝑖𝑗 = 𝛿𝑗𝑖 ; ∗ ∗ - теоремы Гвоздева (или 2-ой теоремы Релея): 𝑟𝑛𝑖 = −𝛿𝑖𝑛 . Определив неизвестные 𝑥𝑖 и 𝑧𝑘 из канонических уравнений смешанного метода, далее несложно определить внутренние усилия 𝑀𝑃 , 𝑄𝑃 , 𝑁𝑃 в заданной системе от заданной нагрузки: ___ ___ 𝑜 ∗ ⋅𝑧 ; 𝑀𝑃 = 𝑀𝑃𝑜 + ∑𝑛𝑖=1 𝑀𝑚𝑛 ⋅ 𝑥𝑖 + ∑𝑘𝑖=𝑛+1 𝑀𝑚𝑛 𝑖 ___ ___ ___ ___ 𝑜 ∗ ⋅𝑧 ; 𝑄𝑃 = 𝑄𝑃𝑜 + ∑𝑛𝑖=1 𝑄𝑚𝑛 ⋅ 𝑥𝑖 + ∑𝑘𝑖=𝑛+1 𝑄𝑚𝑛 𝑖 𝑜 ∗ ⋅𝑧 . 𝑁𝑃 = 𝑁𝑃𝑜 + ∑𝑛𝑖=1 𝑁𝑚𝑛 ⋅ 𝑥𝑖 + ∑𝑘𝑖=𝑛+1 𝑁𝑚𝑛 𝑖 В этих выражениях: 𝑀𝑃𝑜 , 𝑄𝑃𝑜 , 𝑁𝑃𝑜 - изгибающий момент, поперечная и продольная силы от заданной нагрузки в основной системе смешанного метода; ___ ___ ___ 𝑜 𝑜 𝑜 𝑀𝑚𝑛 , 𝑄𝑚𝑛 , 𝑁𝑚𝑛 - внутренние усилия в основной системе смешанного метода от единичного значения лишнего неизвестного 𝑥𝑛 = 1; ___ ___ ___ ∗ ∗ ∗ 𝑀𝑚𝑛 , 𝑄𝑚𝑛 , 𝑁𝑚𝑛 - внутренние усилия в основной системе смешанного метода от единичного смещения введенной связи 𝑧𝑛 = 1. Расчет статически неопределимых плоских ферм Различают три вида статически неопределимых ферм: внешне статически неопределимые, т.е. неопределимые относительно опорных реакций, внутренне статически неопределимые, т.е. неопределимые относительно усилий в стержнях и комбинированные - статически неопределимые относительно и опорных реакций и относительно усилий в стержнях. Первый вид ферм имеет “лишние” только внешние связи и степень их статической неопределимости равна Л = С0 − 3, где С0 - общее число опорных стержней. Ко вторым и третьим статически неопределимым относят фермы, имеющие, соответственно, или только “лишние” стержни в составе решетки, т. е. “лишние” внутренние связи или “лишние” и внутренние и внешние связи одновременно. Общая степень статической неопределимости таких систем определяется выражением: Л = С + С0 − 2 ⋅ У, где: С – количество стержней самой фермы, У – количество узлов, соединяющих стержни фермы друг с другом, при этом число “лишних” внешних связей определяется по той же формуле Л = С0 − 3. Расчет статически неопределимых ферм выполняется по той же принципиальной схеме, что и статически неопределимых рам. Выбирают основную систему: отбрасывают лишние опорные связи, а лишние стержни решетки - перерезают. При выборе основной системы необходимо помнить, что полученная после устранения лишних связей, она должна оставаться геометрически неизменяемой. Действие устраненных связей заменяют действием лишних неизвестных – опорных реакций и усилий в стержнях (см. рис. 8.2). Затем составляют канонические уравнения метода сил, выражающие собой отсутствие перемещений в основной системе по направлению каждого лишнего неизвестного от действия заданной нагрузки и всех лишних неизвестных: 11 x1 12 x2 ... 1n xn 01P 0 ; 21 x1 22 x2 ... 2 т x3 02 P 0 ; .......................... .... n1 x1 n 2 x2 ... nn xn 0nP 0 . Коэффициенты и свободные уравнений определяют по формулам: ___ канонических ___ N 0 N 0 ii i i ds EA 1 0 m l Рис 8.2 члены m l ij 1 0 ___ 0 i [ N i0 ]2 li 0 = 1 EA ; m ___ 0 j N N EA ds = m N i0 N j0 1 EA l0 ; ___ N 0 N P0 iP i ds EA 1 0 m l N i0 N P0 1 EA l 0 = . m В этих выражениях: 𝑁̄𝑖0 , 𝑁̄𝑗0 - усилия в стержнях основной системы от xi=1 и xj=1, соответственно; 𝑁𝑃0 - усилия в стержнях основной системы от заданной нагрузки; A – площадь поперечного сечения стержня фермы. Усилия в стержнях основной системы от единичных значений неизвестных и от заданной нагрузки определяют любым известным методом (аналитическим или графическим). Найденные значения удельных и грузовых перемещений подставляют в уравнения метода сил и решают последние относительно неизвестных xi. Окончательно, усилие в любом i-ом стержне заданной статически неопределимой фермы определяют методом наложения: 0 0 0 0 𝑁𝑖𝑃 = 𝑁̄𝑖1 ⋅ 𝑥1 + 𝑁̄𝑖2 ⋅ 𝑥2 +. . . +𝑁̄𝑖𝑛 ⋅ 𝑥𝑛 + 𝑁𝑖𝑃 . При расчете статически неопределимой фермы на заданное температурное воздействие, канонические уравнения примут вид: 11 x1 12 x2 ... 1n xn 01t 0 ; 21 x1 22 x2 ... 2 т x3 02t 0 ; .......................... .... n1 x1 n 2 x2 ... nn xn 0nt 0 , где: 𝛥0𝑖𝑡 = 𝛼 ⋅ ∑ 𝑁̄𝑖0 ⋅ 𝑡 ⋅ 𝑙, 𝛼 - коэффициент линейного расширения, 𝑡 - изменение температуры стержня по сравнению с начальной. Усилие в любом i-ом стержне заданной системы выразится формулой: 0 0 0 𝑁𝑖𝑃 = 𝑁̄𝑖1 ⋅ 𝑥1 + 𝑁̄𝑖2 ⋅ 𝑥2 +. . . +𝑁̄𝑖𝑛 ⋅ 𝑥𝑛 Общие сведения об арочных конструкциях Конструктивную форму арки можно представить как модификацию рамной конструкции, при которой ее продольная ось приближается к кривой давления, в результате чего резко снижается доля изгибающего момента в работе конструкции, что приводит к существенной экономии материала. Правда при этом усложняется геометрическая форма покрытия, образуются неиспользуемые габариты помещения. Арочные системы становятся существенно экономичнее рамных, начиная с пролетов 80 м и более. В большепролетных покрытиях чаще всего встречаются однопролетные арки. По статической схеме они могут быть трехшарнирными статически определимыми, двухшарнирными один раз статически неопределимыми и бесшарнирными – трижды статичеси неопределимыми. Трехшарнирные арки, как статически определимые системы, нечуствительны к перемещениям (осадкам) опор и температурным изменениям. Однако наличие конькового шарнира усложняет конструкцию арки и требует выполнения дополнительных мероприятий, обеспечивающих герметичность кровли над шарниром, без стеснения взаимного поворота полуарок. Трехшарнирные арки по сравнению с другими типами наиболее деформативны и имеют повышенный расход материала. Бесшарнирные арки максимально реагируют на перемещения опор и изменение температуры. Кроме этого они требуют устройства массивных фундаментов для восприятия опорных моментов. С другой стороны, бесшарнирные арки обладают наибольшей жесткостью и наилучшим распределением изгибающих моментов по длине, что обеспечивает снижение расхода материала на арку. Отсутствие конькового шарнира упрощает и делает более надежной конструкцию кровли. В двухшарнирной арке достоинства и недостатки двух предыдущих систем сглажены. Она менее чувствительна к осадкам опор и изменениям температуры по сравнению с бесшарнирной аркой, более экономична по сравнению с трехшарнирной аркой, не имеет проблем, связанных с устройством конькового шарнира, а фундаменты не испытывают влияние опорных моментов. Именно поэтому, двухшарнирные арки получили в практике строительства наибольшее распространение. При слабых грунтах или установке арок на высоких стенах часто оказывается целесообразным устройство затяжек для восприятия распора. В этом случае фундаменты и стены будут воспринимать в основном только вертикальные нагрузки, что дает существенную экономию и улучшает архитектуру здания. Затяжки могут располагаться в уровне опорных шарниров. При отсутствии стен их располагают в специальных коробах ниже уровня пола. При наличии стен затяжки могут одновременно использоваться для поддержания технологического оборудования и различных устройств (вентиляция, освещение, подвесной потолок и т.д.). Очертание оси арок зависит от многих факторов: функционального назначения здания, его габаритов, действующих нагрузок, технологических условий изготовления и монтажа и т.п. По возможности, оси арок стремятся приближать к кривой давления (рациональная ось), зависящей от вида нагрузки. Однако, такое решение не является однозначным, так как в процессе эксплуатации арка испытывает различные виды нагрузок (постоянная, временные ветровая и снеговая и т.д.). Для пологих арок (𝑓/𝑙 ≤ 1/10) при преимущественном значении равномерно распределенной нагрузки наиболее выгодным оказывается очертание арки по квадратной параболе. Для упрощения изготовления и монтажа параболу часто заменяют дугой окружности, что не оказывает существенного влияния на работу арки. Для высоких арок (𝑓/𝑙 ≻ 1/10) с большим собственным весом покрытия наилучшей кривой является цепная линия (форму цепной линии принимает гибкая тяжелая нерастяжимая нить, подвешенная в двух точках; ее уравнение 𝑦 = 𝑎 ⋅ 𝑐ℎ(𝑥/𝑎)). Однако, при таком очертании существенное значение имеет ветровая нагрузка, которая может действовать в любых направлениях. В этом случае очертание арки целесообразно принимать по оптимально осредненной кривой. При этом в качестве критерия оптимальности можно принять, например, или расход материала, или стоимость всего покрытия. Расчет двухшарнирных арок Двухшарнирные арки один раз статически неопределимы. По конструктивным особенностям они могут быть без затяжки или с затяжкой. Двухшарнирные арки без затяжки При расчете двухшарнирных арок применяют основную систему по методу сил, получаемую заменой в заданной арке одной из шарнирно неподвижных опор подвижной (см. рис. 9.2). Отличие основной системы от заданной устраняют путем приложения горизонтальной силы x1 – лишнего неизвестного. Каноническое уравнение принимает вид: 𝛥 0 𝛿11 ⋅ 𝑥1 + 𝛥1𝑃 = 0, следовательно 𝑥1 = − 𝛿1𝑃 . 11 В этих выражениях: Рис 9.2 l l l ( M i0 ) 2 (Q 0 ) 2 (N 0 )2 dS i dS i dS EI GA EA 0 0 0 11 ; M M Q Q N N dS i dS dS EI GA EA 0 0 0 l 1 P 0 i 0 P l 0 l 0 P 0 i 0 P . На основании сравнительных расчетов, выполнявшихся для двухшарнирных арок с параболической и круговой осью при различных соотношениях стрелы подъема арки к ее пролету (𝑓/𝑙) и при различных соотношениях толщины арки в ключе к ее пролету (ℎ/𝑙) установлено, что при расчете 1 1 арок, применимых в строительстве, со стрелой подъема 𝑓 ≺ 3 𝑙 и с толщиной ℎ ≺ 10 𝑙 можно при определении 𝛿11 пренебречь влиянием поперечных сил, а при определении 𝛥1𝑃 - влиянием и поперечных и продольных сил. Кроме того указанными сравнительными расчетами установлено, что при 1 𝑙 3 1 ≻ 𝑓 ≻ 5𝑙 и ℎ ≺ силами, но и продольными. 1 𝑙 10 можно и при определении 𝛿11 пренебречь не только поперечными После определения неизвестного x1, определяют внутренние усилия, используя принцип независимости и принцип пропорциональности: M P M P0 M 10 x1 ; QP QP0 Q10 x1 ; N P N P0 N10 x1 . Внутренние усилия в двухшарнирной арке можно определить и по формулам, выведенным для трехшарнирной статически определимой арки, если вместо распора подставить найденное значение неизвестного x1. Тогда формулы примут вид: M P M P0 x1 y ; QP QP0 cos x1 sin ; N P [QP0 sin x1 cos ] . Двухшарнирные арки с затяжкой В арке с затяжкой распор воспринимается затяжкой и следовательно на опоры передаются лишь вертикальные составляющие реакций. С точки зрения воздействия на опоры, арку с затяжкой можно отнести к балочным системам. Однако по работе самой системы она несомненно является распорной, а по способу расчета – один раз статически неопределима. Основную систему расчета выбирают путем перерезания затяжки в середине ее длины (см. рис. 9.3). Отличие основной системы от заданной устраним, приложив в месте разреза затяжки две равные и противоположные силы x1. Каноническое уравнение метода сил ∗ 0 примет вид 𝛿11 ⋅ 𝑥1 + 𝛥1𝑃 = 0. = В этом выражении 𝑙 (𝑀̄ 0 )2 𝑙 (𝑄̄ 0 )2 𝑙 (𝑁̄ 0 )2 1⋅𝑙 ∗ Рис 9.3 𝛿11 = ∑ ∫ 𝑖 𝑑𝑆 + ∑ ∫ 𝜇 ⋅ 𝑖 𝑑𝑆 + ∑ ∫ 𝑖 𝑑𝑆 + з - вызываемое 0 𝐸𝐼 0 𝐺𝐴 0 𝐸𝐴 𝐸з ⋅𝐴з силами x1=1 взаимное горизонтальное перемещение концов затяжки в месте произведенного разреза; 0 𝛥1𝑃 - взаимное перемещение в том же месте, вызванное внешней нагрузкой. Последний член формулы ∗ для определения 𝛿11 выражает влияние продольной деформации затяжки. Его можно обозначить, 0 например, 𝛥̄з . Тогда каноническое уравнение примет вид: 𝛿11 ⋅ 𝑥1 + 𝛥1𝑃 = −𝛥̄з ⋅ 𝑥1 , или: 𝛿11 ⋅ 𝑥1 + 𝑥 ⋅𝑙 0 𝛥1𝑃 = − 𝐸 1⋅𝐴з . Отсюда лишнее неизвестное: з з 𝑥1 = − 𝛥01𝑃 𝛿11 + 𝑙з 𝐸з ⋅𝐴з . Здесь 𝛿11 - взаимное горизонтальное перемещение концов затяжки, вызванное влиянием изгибающих моментов, поперечных и продольных усилий в арке. Анализируя выражение для лишнего неизвестного, можно заметить следующее. Если мы будем постепенно уменьшать величину 𝐸з ⋅ 𝐴з или только величину площади Aз поперечного сечения затяжки, 𝑙 з то дробь 𝐸 ⋅𝐴 будет постепенно увеличиваться, а распор x1 – уменьшаться. Чем тоньше, чем податливее з з затяжка, тем меньше то усилие, которое оно воспринимает. Когда площадь затяжки сделается бесконечно малой, дробь обратится в бесконечность и усилие x1 сделается бесконечно малым. Арка, концы которой связаны бесконечно тонкой нитью, лишь формально будет еще статически неопределимой, фактически же она будет работать как кривая статически определимая балка. Если наоборот, увеличивать площадь затяжки, то x1 будет увеличиваться. При стремлении 𝐴з к 𝛥0 бесконечности 𝑥1 = − 𝛿1𝑃 . Этот предельный распор вызовет в бесконечно жесткой затяжке удлинение, 11 равное нулю. Следовательно, концы арки останутся неподвижными. В этом предельном случае арка с затяжкой превращается в обычную двухшарнирную арку – арку с двумя неподвижными пятовыми шарнирами. Расчет бесшарнирных арок Бесшарнирные арки, т.е. арки с защемленными пятами, трижды статически неопределимые. Их применяют в качестве несущих строений мостов и мостовых переходов, покрытий зрелищных и административных зданий больших пролетов. По затрате материала непосредственно на саму конструкцию арки, бесшарнирные арки наиболее экономичны. Но необходимость сооружать мощные опоры для защемления арок снижает их экономичность. Вследствие этого бесшарнирные арки по стоимости “в деле” не получают экономического преимущества в сравнении с другими типами арок. При выборе основной системы для расчета арок стремяться разделить неизвестные, т.е. получить самостоятельные уравнения, каждое из которых содержало бы только по одному неизвестному. С этой целью целесообразно применять основную систему путем разреза заданной арки по оси симметрии и прикрепления в месте разреза двух бесконечно жестких консолей (см. рис. 9.4). Отличие основной системы от заданной устраняем путем приложения на концах консолей двух моментов x1 , двух горизонтальных сил x2 и двух вертикальных сил x3. Канонические уравнения метода сил примут вид: 11 x1 12 x2 13 x3 01P 0 ; 21 x1 22 x2 23 x3 02 P 0 ; 31 x1 32 x2 33 x3 03 P 0 . Коэффициенты, входящие в эти уравнения, определяют по формулам: M m0 M n0 Q 0 Q 0 N0 N0 dS m n dS m n dS EI GA EA 0 0 0 l l mn l Для их вычисления построим эпюры 𝑀̄𝑖0 , 𝑄̄𝑖0 , 𝑁̄𝑖0 в основной системе от единичных неизвестных (см. рис. 9.5). Из рассмотрения рис. 9.4в видно, что уравнения эпюр от единичных лишних неизвестных имеют следующий вид: 0 0 M 10 1; M 2 1 ( y0 y ); M 3 1 x , где y0 – длина консолей. Рис 9.4 N10 0; N 20 cos ; N 30 sin ; Q10 0; Q20 sin ; Q30 cos . Из приведенных на рис. 9.5 эпюр видно, что: - эпюры 𝑀̄10 и 𝑀̄20 , 𝑁̄20 и 𝑄̄30 - симметричны; - эпюры 𝑀̄30 ,𝑁̄30 и 𝑄̄20 - обратно симметричны; - эпюры𝑄̄10 и 𝑁̄10 - нулевые по всей длине арки. Следовательно, побочные перемещения 𝛿13 и 𝛿23 будут равны нулю. Подберем длину консоли 𝑦0 исходя из условия, чтобы и третье побочное перемещение 𝛿12 обращалось в ноль, т.е. M 10 M 20 Q 0 Q20 N 0 N 20 M 0 M 20 dS 1 dS 1 dS 1 dS 0 EI GA EA EI 0 0 0 0 l l 12 Подставим вместо 𝐵 1⋅(𝑦0 −𝑦) 2 ∫𝐴 𝑑𝑆 𝐸𝐼 𝑀̄10 и 𝑀̄20 𝐵 𝑑𝑆 𝑦0 = 𝐵 𝐼0 Если рассматривать ∫𝐴 𝐼 𝐼 l . их выражения (см. выше). Тогда получим: = 0 или 𝑦0 ∫𝐴 Следовательно, 𝐵 l 𝐵𝑦⋅𝑑𝑆 ∫𝐴 𝐼 𝐵𝑑𝑆 ∫𝐴 𝐼 𝐼 = 𝐵 𝑦⋅𝑑𝑆 − ∫𝐴 𝐼 𝐵 𝐼 ∫𝐴 𝑦⋅ 𝐼0 𝑑𝑆 𝐵𝐼 ∫𝐴 𝐼0 𝑑𝑆 =0. . 𝑑𝑆 как приведенную длину арки или приведенный контур арки, а y ∫𝐴 𝑦0 ⋅ 𝐼0 𝑑𝑆 как статический момент приведенного контура арки, то 0 будет представлять собой координату центра тяжести приведенного контура арки. Именно вследствие этого, точку “B” (см. рис. 9.4б) называют упругим центром. Таким образом, если концы консолей совместить с упругим центром “B”, то и перемещения 𝛿12 обратятся в ноль. Канонические уравнения метода сил примут в этом случае следующий вид: 0 𝛿11 ⋅ 𝑥1 + 𝛥1𝑃 = 0; 𝛿22 ⋅ 𝑥2 + 𝛥02𝑃 = 0; 𝛿33 ⋅ 𝑥3 + 𝛥03𝑃 = 0. Рис. 9.5