Лабораторная работа № 5 ТЕОРЕМЫ О ВЗАИМНОСТИ РАБОТ И ПЕРЕМЕЩЕНИЙ Цель:
реклама

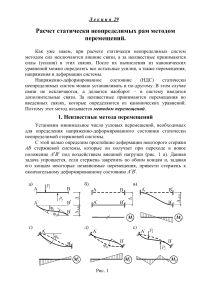
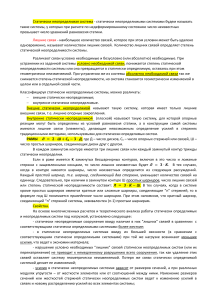
Лабораторная работа № 5 ТЕОРЕМЫ О ВЗАИМНОСТИ РАБОТ И ПЕРЕМЕЩЕНИЙ Цель: 1) экспериментальная проверка теорем, 2) экспериментальное определение изогнутой оси стержня с помощью теорем и сравнение с теоретическим решением. Теория. Теорема о взаимности работ является фундаментальной теоремой в сопротивлении материалов. Она находит применение в расчётах конструкций, состояние которых можно определить линейной связью между нагрузкой и геометрическими изменениями. Существование такой линейной связи есть основа для использования принципа независимости действия сил (принципа суперпозиции), согласно которому какое-либо действие (эффект) совокупности сил действующих одновременно можно определить суммарным результатом последовательных действий каждой силы. Теорему о взаимности работ можно представить как следствие принципа независимости действия двух нагрузок (двух сил) при их поочерёдном приложении. Соответственно конструкция (система) рассматривается в двух состояниях. Они изображаются отдельно (рис.5.1). Система, помимо этих двух изменяющихся сил, может находится под любой другой нагрузкой, которая не изменяется. I. Формулировка теоремы: Работа первой нагрузки на перемещениях, вызванных второй нагрузкой, равна работе второй нагрузки на перемещениях обусловленных первой нагрузкой. Аналитическое выражение теоремы: А 12 А 21 . Для изображённой схемы рис.5.1: Р 1М М 2 Р . В обозначении перемещений используются два индекса: первый указывает направление перемещения, второй – причину этого перемещения. Так, 1 М есть перемещение по направлению силы Р (состояние 1) вызванное моментом М (состояние 2). Не изменяющаяся сила P const со- 39 вершает работу на перемещении 1 М , когда изменяется момент M , и наоборот, не изменяющийся момент M const совершает работу на перемещении 2 Р , которое обусловлено изменением силы P . Теорему о взаимности перемещений можно представить как следствие теоремы о взаимности работ, когда изменяющиеся нагрузки единичные. Единичная нагрузка есть величина безразмерная: Р 1, М 1 . Перемещения от единичных нагрузок обозначаются строчной буквой "дельта" с теми же индексами, как и для физических перемещений. Аналитическое выражение теоремы: 1М 2 Р . Обычно второй индекс, указывающий причину перемещения, поскольку он обусловлен единичной нагрузкой, заменяют цифрой указывающей состояние. Так, для изображенных состояний на рис.1 при М=1 и Р=1 индекс М заменяют цифрой 2, индекс Р цифрой 1 и теорема приобретает вид: 1 2 2 1 или в общем случае i j j i , где буквы принимают числовые значения, обозначающие состояния. II. Эксперимент Оборудование: 1. Установка для исследования изгиба стержня 2. Индикаторы часового типа (цена деления 0,01мм). 3. Набор гирь (вес 1кГ). Проверка теорем Установка позволяет создавать различные опорные закрепления стержня (шарнирно-подвижное, шарнирно-неподвижное, защемление) и тем самым образовывать статически определимые и статически неопределимые системы. В любом сечении стержня нагрузка может быть задана в виде сосредоточенных сил и моментов. Здесь показана одна из возможных схем установки стержня и рядом изображение двух состояний. 40 В отчёте изображать заданную схему системы и её состояния. Таблица 1 При изменении нагрузки Р1 измерять перемещения по направлению нагрузки Р 2 , и наоборот. Для повышения точности эксперимента процесс изменения нагрузок осуществить три раза, результатом является среднее арифметическое значение. Для проверки теоремы о взаимности работ вычислить работу сил при Р1 Р 2 и установить их различие: 1) Р1 …, Р 2 … Из таблицы взять соответствующие им перемеще1 Р2 ..., 2 Р1 ..., ния вычислить работы: А12 Р1 1 Р2 ... , А21 Р2 2 Р1 ... Определить погрешность в процентах: А12 А21 100 ...% . А12 (или А21 , или средняя ) Рассмотреть три комбинации сил, установить среднюю погрешность. Теорема о взаимности перемещений может быть проверена косвенно. При Р1 Р 2 должно быть 1 Р2 2 Р1 . Вычислить погрешность несоблюдения этого равенства (заполнить таблицу) и установить среднюю. Определение изогнутой оси стержня Изобразить заданную схему стержня с указанием всех размеров. Например, рис.5.3. Согласно теореме о взаимности работ для определения изогнутой оси стержня (заданная схема) необходимо установить индикатор в той точке, где приложена нагрузка, а нагрузку перемещать вдоль оси стержня (схема внизу). Индикатор фиксирует перемещения сечений стержня в за41 данной схеме при соответствующем положении груза на схеме внизу. Стержень имеет разметку 5см. Таблица 2 По экспериментальным значениям перемещений на поле не менее 10х15 см 2 с равномерной оцифровкой осей построить график, представляющий изогнутую ось стержня. Нанести теоретические значения перемещений вычисленные по уравнению изогнутой оси, используя для его записи универсальное уравнение метода начальных параметров: Pi x ai 3 . EJ z v EJ z vo EJ z o x 6 i Оценить погрешность. Выводы: заключение о результатах проверки теорем с анализом источников погрешностей. 42 Лабораторная работа № 6 ИССЛЕДОВАНИЕ СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ СИСТЕМЫ Цель: 1. экспериментально определить распределение нагрузки по элементам системы; 2. сравнить с результатами теоретического решения. Теория. Системы, для которых опорные реакции и внутренние силы (силовые факторы) невозможно определить из уравнений равновесия, являются статически неопределимыми. В таких системах, кроме связей необходимых для обеспечения кинематической неизменяемости, имеются дополнительные связи - "лишние". Число дополнительных связей может быть любым и оно определяет степень статической неопределимости. Степень статической неопределимости устанавливается как разность между числом неизвестных реакций во всех связях (внешних в опорных устройствах и внутренних в соединениях элементов) и числом уравнений статики (равновесия), которые могут быть составлены для системы в целом и для каждого её элемента. I. Так, в расчётной схеме заданной системы рис.6.1. имеются шесть внешних связей в опорных устройствах и одна внутренняя. Для каждого элемента можно составить три уравнения равновесия (для этого элемент освобождают от связей, действие которых выражается соответствующими 43 реакциями). В итоге имеем семь неизвестных реакций и шесть уравнений равновесия и, следовательно, система один раз статически неопределима – одна связь "лишняя". Расчёт статически неопределимых систем предусматривает составление дополнительных уравнений, число которых равно степени статической неопределимости. Эти уравнения представляют собой аналитические выражения ограничений на перемещения в системе, которые обуславливают имеющиеся связи. "Лишней" или дополнительной связью может считаться любая связь, устранение которой не создаёт кинематической изменяемости системы. Связи, устранение которых создаёт кинематическую изменяемость системы, называются абсолютно необходимыми. Такими в рассматриваемой системе являются горизонтальные связи в шарнирно неподвижных опорах. Система без "лишних" связей является статически определимой и называется "основной". Из одной статически неопределимой системы можно образовать несколько основных систем. Так, в заданной системе для образования основной системы можно убрать одну какую-либо вертикальную связь или внутреннюю (рис.6.3.). Если основную систему нагрузить заданной системой сил Р и неизвестными усилиями Х взамен отброшенных связей, а затем обеспечить ограничения на перемещения, которые накладывают эти связи в заданной системе, то такая система станет эквивалентной. Так, в системе без вертикальной внешней связи необходимо, чтобы перемещение точки В отсутствовало, в системе без внутренней связи необходимо обеспечить отсутствие перемещения точки С 1 относительно точки С 2 (взаимное перемещение). Введение понятий основной и эквивалентной систем канонизирует методику составления дополнительных уравнений и является основой расчёта статически неопределимых систем по "методу сил". 44 Так, для всех систем один раз статически неопределимых дополнительным уравнением является уравнение перемещений образуемого на основании принципа независимости действия сил 11 Х 1 1Р 1( Х , Р ) , 1 где 1( Х 1 , Р ) есть перемещение по направлению устранённой связи. В тех случаях, где связи не допускают перемещений 1( Х Р ) 0 . 1, Поскольку из одной статически неопределимой системы можно образовать несколько основных систем, необходимо из них выбрать какуюлибо для расчёта. Следует выбирать систему, расчёт которой представляет меньшие трудности. Например, возьмём как основную систему а: Перемещение в статически определимой системе от заданной нагрузки (грузовое состояние) по направлению отброшенной связи определяется произведением площадей диаграммы изгибающих моментов М Р 45 на ординаты диаграммы моментов М 1 вспомогательного состояния соответствующих положению центра тяжести площадей М Р : 1 Р 1 1 Р 2 2 2 2 E2 J 2 2 3 2 4 P 32 . 24 E J 2 2 (Диаграммы построены на растянутой стороне стержня и произведение отрицательно, если они для двух состояний находятся по разные сторону его оси). Перемещение от единичной нагрузки (вспомогательное состояние) определяется произведением площадей диаграммы М 1 на её же ординаты: 31 32 2 1 1 1 1 2 1 2 2 2 11 . E1 J 1 2 2 2 3 E 2 J 2 2 2 2 3 12 E1 J 1 12 E 2 J 2 Если вместо единичной нагрузки будет сила Х 1 , то перемещение от неё будет 1 Х 11 Х 1 . Суммарное перемещение от нагрузки Р силы Х 1 1 равно нулю. Из канонического уравнения находим: Х1 1Р 11 Р . 3 E J 21 2 2 31 E1 J 1 2 Соответственно этому результату (смотри грузовое и вспомогательное состояния) первый элемент воспринимает нагрузку Р Р1 2 Х 1 1 второй элемент E2 J 2 1 E1 J 1 2 3 P Р2 Р 2 Х 1 3 , . E1 J 1 2 E2 J 2 1 Соотношение между нагрузками на элементы при Р Р1 Р2 : 1 Р1 E1 J 1 2 3 . Р2 E 2 J 2 1 Каждый элемент воспринимает нагрузку соответственно своей жесткости. Самостоятельно можно убедиться, что расчёт системы b несколько проще. II. Эксперимент 1. Машина для испытаний (указать тип машины). 2. Измеритель стрелы прогиба. 46 3. Линейка. Таблица 1 Эксперимент заключается в установлении зависимостей "нагрузка – перемещение" для системы и затем для её элементов при упругом деформировании. Таблица 2 Обработка экспериментальных результатов По результатам наблюдений построить графики "нагрузка – перемещения" с равномерной оцифровкой осей и в одном масштабе по оси пере 47 мещений. Указать все экспериментальные точки и провести усредняющие прямые линии. Если усреднённая линия (прерывистая на иллюстрации представления графиков) не проходит через начало координат, провести соответствующую линию параллельную усредненной. В работе использовать линии, проходящие через начало координат. Сравнение теоретического и экспериментального решений Указать нагрузку на систему Р (назначить произвольно) и по графикам определить значения Р1Э и Р 2 Э . Определить Р1Т и Р 2Т для принятого значения нагрузки Р по результатам теоретического решения (см. теория). Установить погрешности: Р1Э Р1Т 100 ...% , Р1Т Р 2 Э Р 2Т 100 ...% , Р 2Т Сравнить соотношения: Р1Э Р ... , 1Т ... . Р 2Т Р2 Э Примечание: Модули упругости материала балок Е1 и Е 2 можно определить по соответствующим графикам (см. "Изгиб деревянной балки"). Выводы. Заключение о результатах проверки с анализом возможных источников погрешностей в эксперименте. Лабораторная работа № 7 ИССЛЕДОВАНИЕ КОСОГО ИЗГИБА 48 Цель: экспериментальная проверка основных положений теории косого изгиба: определение положения нейтральной линии tg tg Jz Jy и перемещений 2z 2y . Теория. Под косым изгибом понимается такой вид изгиба, когда плоскость действия изгибающего момента М И не совпадает с главными центральными осями поперечного сечения стержня y, z (рис.7.1,а). Косой изгиб возникает, если перпендикулярная к оси стержня нагрузка действует в разных плоскостях (рис.7.1b), или ориентирована произвольно по отношению к главным центральным осям его сечения (рис.7.1,с). На плоскости можно использовать следующее изображение моментов перпендикулярных к ней (рис.7.2). Косой изгиб представляется, как совокупность двух плоских изгибов в главных плоскостях моментами М Z и М Y . Результирующий момент определяется геометрической суммой: III. М И М Z2 M Y2 , а угол наклона, если его отсчитывать от оси у, отношением: tg MY . MZ Оси следует направлять таким образом, чтобы результирующий момент проходил через I и III квадранты. 49 Нормальные напряжения в любой точке сечения определяются алгебраической суммой напряжений от двух моментов: В MZ M yB Y zB . Jz Jy Координаты точки имеют знаки. Так, на рис.1,а координата z B отрицательна, y B положительна. Следовательно, во всех точках I квадранта напряжения положительны, а в точках III квадранта отрицательны. Нейтральная линия проходит через II и IV квадранты, и координаты её точек y0 , z 0 находятся из условия отсутствия напряжений в них: MZ M y0 Y z 0 0 . Jz Jy Нейтральная линия проходит через центр тяжести сечения, и её положение можно определить углом наклона к оси z: tg y0 M J J Y z tg z . z0 M Z J y Jy Если J z J y , то нейтральная линия в сечении стержня не перпендикулярна плоскости действия результирующего изгибающего момента ( ), стержень "предпочитает" изгибаться не в его плоскости, как это бывает при плоском изгибе. Именно этим и обусловлено название "косой" изгиб. Для сечений с равными моментами инерции J z J y нейтральная линия перпендикулярна плоскости действия результирующего момента и "косого" изгиба нет. Линейные перемещения сечений определяются геометрической суммой перемещений по направлениям главных осей. II. Эксперимент 4. Установка для испытаний стержня на изгиб. 5. Индикаторы часового типа (0,01мм). 6. Штангенциркуль, линейка. На установке консольный стержень (равнобокий уголок) можно установить под любым углом к вертикальной нагрузке, создаваемой гирями весом 1кг. Индикаторы показывают горизонтальное и вертикальное перемещения сечения в месте их расположения. Перед началом эксперимента установить размеры, номер уголка стержня и по сортаменту проката моменты инерции относительно главных центральных осей. Изобразить заданную ориентацию уголка (н/п, как на рис. 7.3). 50 Эксперимент заключается в определении перемещений при трёх ориентациях стержня к вертикальной нагрузке. Таблица наблюдений Графическое представление экспериментальных результатов По результатам наблюдений построить графики "нагрузка – перемещения" с равномерной оцифровкой осей. Указать все экспериментальные точки и провести усредняющие прямые линии. Если усреднённая линия (прерывистая на иллюстрации представления графиков) не проходит через начало координат, провести соответствующую линию параллельную усредненной. В работе использовать линии, проходящие через начало координат. 51 Сравнение эксперимента с теорией. 1. Положение нейтральной линии (следует изобразить для заданного угла ). Для любого принятого (расчётного) значения нагрузки Р ...кГ , по графикам для косого изгиба находим перемещения в горизонтальном и вертикальном направлениях гор ... мм , верт ... мм . Из рисунка гор гор , arc tg . верт верт Э . Вычисляем угол: tg Его теоретическое значение: Т arc tg Погрешность: 2. Определение перемещений: Jz . Jy Э Т 100 ...% . Т Э 2гор 2верт = мм. 52 В теоретическом представлении косого изгиба двумя плоскими, разлагаем нагрузку на составляющие и из соответствующих графиков плоского изгиба определяем перемещения в направлениях главных осей Р y P cos ...кГ , y ... мм , РZ P sin ...кГ , z ... мм Полное перемещение Погрешность: T 2y 2z = … мм. Э Т 100 ...% Т Примечание 1: В представлении косого изгиба двумя плоскими изгибами теоретическое значение полного перемещения определяется также с помощью универсального уравнения упругой кривой или интегралов Мора, вычисляемых по способу Верещагина. Так, по способу Верещагина: y nP M n cn n , EJ где n число элементарных площадей диаграммы. Если диаграмма грузового состояния ограничена прямыми линиями (линейные функции) можно перемножать площади диаграммы вспомогательного состояния на ординаты диаграммы грузового состояния: y n1 M 1 cn n EJ . 53 Соответственно, y 2 1 a EJ z 2 площадь ордината 2 Py a b . 3 Аналогично для другого направления: 1 a2 2 z Pz a b . EJ y 2 3 Как можно заметить (см. или), перемножение площадей грузовой диаграммы моментов на ординаты вспомогательной требует увеличения вычислительной работы. Примечание 2. Результаты измерений перемещений при изгибе стержня в направлениях главных осей позволяют по аналитическим связям перемещений с нагрузкой определить осевые моменты инерции сечения стержня, и сравнить их со значениями из сортамента стального проката: 1 a2 2 Jz Py a b . E y 2 3 Аналогично определяется и J y . Выводы. Заключение о результатах проверки с анализом возможных источников погрешностей в эксперименте. Лабораторная работа № 8 ИСПЫТАНИЕ МАТЕРИАЛОВ НА УДАР Цель: определить ударную вязкость материалов. Теория. Испытания материалов медленно изменяющейся нагрузкой (статической) не характеризуют полностью их механические свойства. В реальных условиях эксплуатации многие элементы конструкции подвергаются быстро изменяющимся нагрузкам (динамическим) и, выбирая материал для них, необходимо это учитывать. При большой скорости изменения нагрузки образование и развитие пластических деформаций запаздывает, в результате чего увеличивается предел текучести и разрушающее напряжение (рис.8.1). Наиболее заметно влияние скорости деформирования при высоких температурах. В сопротивлении материалов конструкций упругому деформированию динамическая нагрузка представляется как статическая умноженная на коэффициент динамичности: IV. 54 Р ДИН РСТ k дин . Соответственно этому представлению определяются напряжения, перемещения и формулируются условия прочности и жесткости: max ДИН мах СТ k дин , max ДИН мах СТ k дин . Понятно, что такое представление является условным и приблизительным, и особенно, в определении величины допускаемых напряжений, которые назначаются обычно по результатам статических испытаний. Все твёрдые материалы, в какой то мере способны поглощать энергию удара. За эту меру принята условная величина, названная ударной вязкостью. Ударная вязкость определяется величиной работы, затраченной на разрушения образца специальной формы, отнесённая к площади поперечного сечения в месте излома: а U работа Н м кГм . размерност ь : , 2 2 А площадь м см В размерности ударной вязкости не допускаются сокращения. Ударная вязкость не находит применения в расчётах на прочность. Эта специальная характеристика принята для оценки способности материалов сопротивляться ударным воздействиям. Для удовлетворительной работы в таких условиях её значение должно быть не менее (8 10 ) кГм / см 2 . Ударная вязкость сталей зависит от их структуры и эту зависимость нельзя обнаружить при статических испытаниях. Так, для примера в таблице приведены результаты определения ударной вязкости мелкозернистой и крупнозернистой стали. Они проявляют почти одинаковые прочностные и деформационные свойства в статических испытаниях, но значительно отличаются по ударной вязкости. С понижением температуры ударная вязкость материалов понижается. Существует температура "критическая", при которой происходит резкое уменьшение её, и материал становится непригодным для работы при динамических воздействиях. Изменение ударной вязкости наблюдается и при повышенных температурах. Так, для углеродистых сталей она значительно понижается в интервале температур 200 о 500 о . 55 II. Эксперимент 7. Машина для испытаний на удар (маятниковый копёр). 8. Штангенциркуль. Образец и схема испытания Образец помещают свободно на плоские опоры так, чтобы надрез был обращён в сторону противоположную удару по его направлению, и разрушают его одним ударом. Надрез находится в области растяжения. Форма надреза, размеры образца, скорость удара оказывают влияние на значение ударной вязкости. Расстояние между опорами (пролёт) не влияет на результаты, если его отношение к высоте образца находится в пределах от 4 до 8. Для получения сопоставимых результатов форма и размеры образцов стандартизируются. Надрез является концентратором напряжений и служит для сосредоточения (локализации) энергии удара в месте разрушения. Чем острее и глубже надрез, тем меньше становится область распространения пластической деформации. Материал в области надреза находится в условиях всестороннего растяжения. В направлениях перпендикулярных растягивающим напряжениям от изгиба возникают растягивающие напряжения от стеснения поперечных деформаций. Всестороннее растяжение (даже неоднородное) является весьма жёстким условием работы материала и позволяет даже в самом пластичном материале обнаружить хрупкость. Перед испытанием осуществляется проверка размеров образца. Примечание. Получение излома надрезанного образца ударом является средством исследования структуры материала в материаловедении. Известно, что вид поверхности разрушения растянутого образца уже является ценным добавлением к цифровым данным о свойствах материала. Если в статических испытаниях влияние различных факторов на структуру материала является как бы замаскированным (до разрыва образца в нём происходит значительная деформация), то по виду структуры из56 лома надрезанного образца разрушенного ударом обнаруживается даже слабое изменение в термической обработке материала. Вычисление работы затраченной на излом образца Маятник поднимают в начальное положение на высоту Н, которая отмечается углом подъема . Из этого положения он освобождается и при отсутствии образца (холостой ход) в своём движении, преодолевая сопротивление сил трения в опорном узле и воздуха, поднимается на высоту ho (угол o ). Работа, затраченная на преодоление сил сопротивления на пути о , определяется разностью потенциальных энергий маятника в крайних положениях: U о Q H Q hо Q R cos o cos . С установленным образцом энергия маятника расходуется на его разрушение и преодоление сил сопротивления на пути . Считая, что работа на преодоление сил сопротивления пропорциональна пройденному пути маятника, работа, затраченная на разрушение образца, находится из выражения: U (Q H Q h ) U o Q R cos cos U o . o o Примечание: Перед началом работы необходимо ознакомится с устройством копра. 57 При работе соблюдать правила техники безопасности: 1. не находится в зоне движения маятника, 2. не останавливать маятник руками. 3. образец после разрушения поднимать после полной остановки маятника. Таблица наблюдений и результатов В таблице указать используемую размерность величин. Привести вычисление работ и ударной вязкости для каждого материала. Выводы. Характер разрушений образцов и сравнительное заключение о сопротивлении испытанных материалов удару. 58