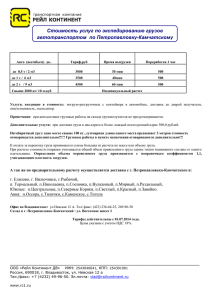
4. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОПРЕДЕЛЕНИЯ УДЕЛЬНОЙ СТОИМОСТИ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ЦЕЛЕВУЮ ОРБИТУ С ПОМОЩЬЮ РАЗГОННОГО БЛОКА 4.1 Обоснование разработки математической модели Сущность построения математической модели состоит в том, что реальная система упрощается, схематизируется и описывается с помощью того или иного математического аппарата. Математическая модель описывает взаимосвязь входных параметров системы X и ее выходных характеристик Y. Такие взаимосвязи могут быть представлены: • вектор-функциями У = F(X> t) • неявными функциями F(X, У, t) = 0; • обыкновенными дифференциальными уравнениями • дифференциальными уравнениями с частными производными • вычислительными алгоритмами; • вероятностными (стохастическими) описаниями, где X = Х]Г Х2, Хп — параметры системы; Y =YV Y2, Yn — выходные характеристики системы; F — функция, реализованная в модели. Цель построения математической модели сводится к выявлению вида функции F и представлению ее в форме, пригодной для вычисления выходных характеристик. При этом обеспечивается возможность оценки выходных характеристик при заданных значениях входных параметров, а следовательно, нахождение таких значений входных параметров, которые обеспечат получение оптимальных значений выходных характеристик. Состав выходных характеристик должен обеспечивать полноту отображения исследуемых свойств системы, таких, например, как производительность, стоимость, энергоемкость, надежность и т.д., определяемых целями и задачами исследования. Состав входных параметров, определенных в концептуальной модели, должен охватывать все существенные аспекты системы, влияющие на качество ее функционирования. Состав входных параметров, выходных характеристик, диапазон их изменения характеризуют область определения модели. Чем она шире, тем модель более универсальна и тем большее число задач можно решить с ее использованием. При описании математической модели должны быть изложены все допущения, использованные при ее построении, а также алгоритм перевода исходных параметров и выходных характеристик с модели на системуоригинал и обратно. В понятие «математическая модель» входят также все начальные, граничные и конечные условия и ограничения. Таким образом, разработать математическую модель — значит определить совокупность данных, допущений, ограничений, функций и методов вычислений, позволяющих получить требуемый результат. Помимо области определения математические модели принято характеризовать размерностью и сложностью вычислений, связанных с определением выходных характеристик. Размерность модели определяется числом входных параметров, внешних воздействий и выходных характеристик модели. Сложность вычислений характеризуется затратами ресурсов ЭВМ, таких как число операций процессора, необходимое для реализации модели, объем необходимой оперативной и внешней памяти. Сложность вычислений, как правило, является монотонно возрастающей функцией от размерности модели. Для реализации математической модели необходимо определить значения количественных параметров, которые будут использованы в виде исходных данных для моделирования. Исходные данные могут быть получены либо путем анализа ранее созданных аналогичных систем, либо путем экспертных оценок, когда выдвигаются и оцениваются гипотезы о возможных их значениях. При определении исходных данных необходимо учитывать, что параметры системы могут иметь различную степень неопределенности, могут быть детерминированными или стохастическими, стационарными или нестационарными и т.д. Ряд параметров системы могут являться случайными величинами по своей природе, но с целью упрощения модели они могут быть заменены детерминированными средними их значениями. В случае когда для оценки случайных параметров системы имеется определенный статистический материал, появляется возможность представления этих параметров случайными величинами с теоретическим законом распределения. Для этого реализуется распределения. По стандартная статистическим процедура данным определения строится закона гистограмма относительных частот параметра, которая аппроксимируется плавной кривой. По ее виду выбирается один из наиболее подходящих законов распределения и вычисляются его характеристики. Проверка совпадения эмпирического и теоретического законов распределения осуществляется по одному из критериев согласия, например критерию согласия Пирсона, Колмогорова и т.д. Особо сложно определять исходные данные по динамическим параметрам системы. Однако такого рода зависимости параметров от времени необходимо учитывать, так как в противном случае модель может оказаться неадекватной. Во многих случаях вид функциональной зависимости характеристик системы или ее элементов от входных параметров может быть легко выявлен. Однако для некоторых элементов системы удается получить лишь экспериментальные данные по входным параметрам и выходным характеристикам. Для этого случая характер функциональной зависимости определяется путем аппроксимации экспериментальных данных математическим уравнением. Поиск этого уравнения корреляционного, выполняется регрессионного или с использованием дисперсионного методов анализа. Вид математического уравнения определяет исследователь системы путем оценки и анализа экспериментальных данных. Затем, как правило, методом наименьших квадратов вычисляются коэффициенты уравнения. Оценка согласованности опытных данных и полученного аналитического выражения осуществляется с помощью корреляционного анализа. Процесс сбора и обработки исходных данных заканчивается их классификацией на непрерывные и дискретные, постоянные и переменные, внешние и внутренние, детерминированные и стохастические, стационарные и нестационарные, линейные и нелинейные. Для непрерывных количественных параметров определяются границы их изменения, а для дискретных — все возможные их значения. Математическая модель может быть исследована аналитическими или имитационными методами. Использование аналитических методов возможно лишь в случае наличия явных аналитических зависимостей между параметрами системы и внешних воздействий и ее выходными характеристиками. Однако такая возможность имеется в крайне редких случаях и в основном для простых систем. При имитационном моделировании процессы функционирования исследуемой системы подменяются процессами, реализуемыми в модели, но с соблюдением временной последовательности отдельных операций и всех других свойств, характерных для каждой операции. Методы имитационного моделирования могут быть реализованы для различного класса исследуемых систем, а также для любого вида параметров системы и внешних моделировании случайных вероятностных характеристик воздействий. процессов системы для При получения требуется их имитационном достоверных многократное воспроизведение с различными значениями случайных величин и их последующей статистической обработкой. В основу этого вида моделирования положен метод статистических испытаний, называемый методом Монте-Карло. При разработке имитационных моделей могут использоваться два вида подходов — алгоритмический или структурный. В алгоритмическом виде моделирования процессы управляют элементами системы, а в структурном — элементы системы управляют функционирования модели. процессами, определяют порядок По способу определения модельного времени методы имитационного моделирования делятся на два вида — методы с приращением временного интервала и методы с продвижением времени до особых состояний. В первом случае модельное время продвигается на некоторую дискретную величину 8t, определяемую исследователем. В основном в каждом из получаемых моментов времени определяются значения входных параметров системы, внешних воздействий и выходных характеристик. Затем модельное время продвигается на величину 8V и процедура повторяется. Такой процесс продолжается до конца установленного времени моделирования. Этот метод имитационного моделирования называют методом, реализованным по принципу Ып. Во втором случае сначала определяются так называемые особые состояния системы. К ним обычно относят моменты поступления дискретных входных воздействий или моменты завершения того или иного функционального процесса или другие интересующие исследователя события. Затем определяется момент наступления ближайшего особого состояния, анализируется реакция модели на это состояние, фиксируются параметры системы, внешних воздействий и выходные характеристики системы. Далее определяется момент наступления следующего ближайшего особого состояния и все операции повторяются. Так продолжается до завершения установленного времени моделирования. Этот метод имитационного моделирования называют методом, реализованным по принципу особых состояний. Основным техническим средством реализации имитационных моделей являются ЭВМ. Имитационные модели сложных систем предъявляют достаточно высокие требования к быстродействию ЭВМ и объемам оперативной и внешней памяти. Обычно эти требования выполняются не одной ЭВМ, а многопроцессорными вычислительными системами, построенными на основе локальных вычислительных сетей. Сущность имитационного моделирования состоит в проведении на ЭВМ (вычислительной системе) экспериментов с моделью, которая представляет собой определенный программный комплекс, реализующий алгоритм поведения системы в целом и ее элементов. Процесс имитационного моделирования, включая разработку имитационной модели, алгоритма ее реализации, программного комплекса для ЭВМ, является, как правило, итерационным. Он реализуется с целью получения модели, приемлемой для решения поставленной задачи исследования и проектирования системы. Разработка программ имитационных моделей осуществляется с использованием различных алгоритмических языков, поэтому одной из важных задач разработки имитационной модели является выбор наиболее подходящего для поставленных целей исследования алгоритмического языка. Под алгоритмическим языком понимают набор символов, различаемых и реализуемых ЭВМ. Для разработки имитационных моделей систем используются: • универсальные и процедурно ориентированные языки общего назначения; • специализированные языки имитационного моделирования. При этом языки общего назначения предоставляют программисту-разработчику модели больше возможностей в смысле гибкости разработки, отладки и использования модели. Однако в них не предусмотрено выполнение некоторых операций, свойственных процессу создания модели системы, что существенно усложняет программирование модели. Имеющиеся языки имитационного моделирования можно разбить на три основные группы, соответствующие трем типам математических схем: непрерывные, дискретные и комбинированные. В основе рассматриваемой классификации в некоторых языках имитационного моделирования лежит принцип формирования системного времени. Непрерывное представление системы сводится к составлению уравнений, с помощью которых устанавливается связь между зависимыми и независимыми переменными модели. Для событий второго типа процесс моделирования состоит в продвижении системного времени от момента наступления события до следующего аналогичного момента. Представление системы в виде схемы, в которой участвуют как непрерывные, так и дискретные величины, называется комбинированным. Для моделирования непрерывных систем получил распространение язык CSMP и ряд других, такие как MIDAS, PACTOLUS, CSSL. К отечественным языкам и системам моделирования непрерывных систем относятся МАСЛИН и МАСС. Для моделирования дискретных систем разработаны языки высокого уровня SIMULA, SIMSCRIPT, GPSS, CSL и др. Наибольшее распространение из этих языков получил GPSS. В GPSS важное место занимает обработка таких объектов, как транзакции (сообщения, заявки, запросы). Примерами языков, реализующих комбинированное моделирование, являются GASP, НЕДИС и МИКС (моделирование имитационное комбинированных систем). Система МИКС имеет в своей основе блочно-ориентированный язык, позволяющей легко и быстро моделировать исследуемую систему, осуществлять быстрое преобразование модели, воспроизводить реально действующие сигналы и организовать вычислительный эксперимент. НЕДИС — язык моделирования непрерывно-дискретных систем, создан на основе алгоритмических языков высокого уровня и относится к системам программирования универсального тина. При разработке имитационных моделей получили широкое распространение такие программные системы, как MathCad, MATLAB, MATRIXX. В этих комплексных системах используются такие средства моделирования, как System Build и Simulink, существенно облегчающие процесс разработки программ. При выборе языка моделирования следует учитывать ряд требований, которые он должен обеспечить: • решение всех задач исследования системы; • ориентацию на данную предметную область; • наличие диалоговых и графических средств; • удобство описания процесса функционирования системы; • удобство ввода, уточнения или изменения исходных данных; • удобство составления и изменения структуры модели, ее алгоритма функционирования и параметров системы и внешних воздействий; • возможность реализации как детерминированного, так и стохастического режимов моделирования; • простоту отладки написанной программы модели и контроль ее выполнения; • возможность быстрого освоения и простоту использования языка. Наряду с вышеперечисленными общими требованиями, определяющими выбор языка моделирования, при сравнении языков общего назначения и языков имитационного моделирования следует учитывать следующие преимущества последних: • они содержит абстрактные конструкции, непосредственно отражающие понятия, в которых представлена формализованная модель, и близкие концептуальному уровню описания моделируемой системы, что упрощает процесс программирования, позволяет автоматизировать выявление многих ошибок в программах; • имеют эффективный встроенный механизм продвижения модельного времени; • содержат встроенные датчики случайных чисел, генераторы других типовых воздействий; • имеют средства сбора и выдачи статистики результатов моделирования в табличной или графической форме; • имеют средства, упрощающие программирование имитационных экспериментов. Однако языкам моделирования присущи и определенные недостатки, главными из которых являются индивидуальный характер соответствующих трансляторов, затрудняющий их реализацию на различных ЭВМ, нехватка документации для пользователей и специалистов-кон- сультантов и др. Необходимость упрощения и ускорения процесса программирования привела к необходимости его автоматизации. К настоящему времени создан ряд систем автоматизации имитационного моделирования. 4.2 Математическая модель В работе с помощью разработанной модели выполнен анализ удельной стоимости выведения полезной нагрузки на геопереходную орбиту с помощью разгонного блока. На основе разработанной модели стоимости определены условия целесообразности разработки и эксплуатации космических разгонных блоков многократного использования. За основу транспортных операций взят переход с низкой околоземной орбиты 200 км на геопереходную орбиту. Сформулированы основные требования к выбору параметров двигательной установки разгонного блока многократного использования (тяга (или расход), соотношение компонентов, степень расширения давление в камере сгорания и др.) Список использованных сокращений ГПО – геопереходная орбита ГСО – геостационарная орбита ДУ – двигательная установка ЖРД – жидкостной ракетный двигатель КА – космический аппарат МРБ – многоразовый разгонный блок ОЗС – орбитальная заправочная станция ОРБ – одноразовый разгонный блок РБ – разгонный блок РН – ракета-носитель Введение Использование разгонных блоков стало ключевым элементом всей космической транспортной инфраструктуры. Для транспортировки КА на ГСО и другие высокоэнергетические орбиты наиболее предпочтительно использование кислородно-водородных РБ. В настоящее время кислородноводородными РБ обладают пять стран: США, ЕС, Япония, Индия и Россия. В ряду уже существующих кислородно-водородных ЖРД присутствуют все возможные схемы: открытая, закрытая и безгенераторная. Наиболее перспективной среди этих схем является безгенераторная схема. Хотя она и несколько уступает закрытой по энергетике из-за ограниченности давления в камере по балансу мощностей и открытой по степени теоретической и практической проработке, но превосходит их обоих по надежности и дешевизне отработки и производства. Одним из главных недостатков всех кислородно-водородных РБ является высокая стоимость доставки единицы массы полезного груза на целевую орбиту. И связано это прежде всего с большими затратами на производство и отработку кислородно-водородных ДУ. Одним из путей снижения этой стоимости является переход к использованию многоразовых разгонных блоков космического базирования с возможностью дозаправки на орбите. Применение таких РБ является наиболее предпочтительным средством снижения суммарных затрат на выполнение всей программы транспортировки. Помимо этого, одним из главных преимуществ применения МРБ перед ОРБ, будет существенное сокращение количества объектов космического мусора на орбите захоронения вблизи ГСО и на низких и эллиптических орбитах. Постановка задачи. Основным критерием выбора между ОРБ и МРБ является величина суммарных затрат на выполнение программы, то есть произведение уд. стоимости на суммарную массу выведенного полезного груза. Но, так как величина грузопотока для корректного сравнения должна быть равной, то основным критерием сравнения ОРБ и МРБ будет являться удельная стоимость выведения полезного груза при равном суммарном грузопотоке. Для создания конкурентоспособного МРБ необходимо еще на ранних этапах проектирования определить требования к его ДУ, обеспечивающие меньшую удельную стоимость выведения по сравнению с ОРБ. Для выбора требований необходимо создание модели, позволяющей проанализировать влияние основных проектных параметров на удельную стоимость. То есть для определения оптимальных по удельной стоимости требований к ДУ необходимо знать, как влияет изменение основных проектных параметров ДУ на удельную стоимость выведения. К основным проектным параметрам ДУ РБ относятся: - коэффициент избытка окислителя; - давление в камере сгорания; - расход в камеру сгорания; - степень расширения сопла. Кроме основных проектных параметров модель должна учитывать: - величину потребной характеристической скорости наиболее часто совершаемого межорбитального перехода; - высоту начальной (или базовой) орбиты; - стартовую массу РБ на начальной орбите; - суммарный грузопоток за все время программы космической транспортировки; - количество МРБ, задействованных в программе транспортировки; Учет вышеперечисленных факторов позволит выбрать требования для ДУ МБР специализированного под конкретную задачу. Проектирование МРБ, для широкого спектра задач и способного конкурировать с ОРБ по массе полезного груза, доставляемого на высокоэнергетические орбиты, практически нецелесообразно на данном уровне космического двигателестроения. Для решения поставленной задачи была разработана математическая модель. Математическая модель. В разработанной модели расчет удельной стоимости производиться в несколько этапов. На первом этапе интерполируются данные термодинамических расчетов [7] и, по методике изложенной в [7], и по основным проектным параметрам ЖРД определяются потери удельного импульса в сопле. Принимая потери в камере сгорания равными ?кам=0.985, находится ?уи= ?кам ?сопла и действительное значение удельного импульса. На втором этапе, по данным полученным из первого этапа, и по зависимостям, изложенным в [1], рассчитывается масса ЖРД. Далее с учетом результатов баллистического расчета вычисляется потребная масса топлива, сухая масса РБ и масса полезного груза. На третьем этапе по известной массе топлива, сухой массе РБ и массе полезного груза рассчитываются стоимости потребного запаса топлива, производства и разработки РБ и стоимость выведения полезного груза на целевую орбиту. И, наконец, по известному суммарному грузопотоку за всю программу космической транспортировки вычисляется удельная стоимость выведения полезного груза на целевую орбиту. Модель позволяет проанализировать влияние основных проектных параметров ДУ РБ на удельную стоимость выведения как для МРБ так для ОРБ (как для частного случая МРБ). Причем расчет может вестись как в прямом, так и в обратном направлении. То есть по известному значению удельной стоимости, решается обратная задача с учетом косвенных факторов, и вычисляются удовлетворяющие ему значения основных проектных параметров. В основу модели легли: - методика расчета массовых характеристик РБ подробно изложенная в [1]; - методика оценки стоимости разработки и производства космической техники, в которой, по статистическим зависимостям, определяется стоимость разработки и производства ДУ и РБ [2]. На рисунке 1 представлена блок-схема структуры математической модели. В общем виде, в используемых стоимостных зависимостях, стоимость производства и стоимость разработки представляет собой степенную функцию от массы, в которой показатель степени и коэффициенты являются аппроксимационными. Стоимость производства кислородно-водородной ДУ [2]: , (1) где MДУ – масса двигательной установки; f4(n) = nln(0.89)/ln(2) – фактор снижения затрат при массовом производстве n двигателей. Стоимость производства конструкции кислородно-водородного РБ [2]: , (2) где MДУ – масса двигательной установки; f4(n) = nln(0.89)/ln(2) – фактор снижения затрат при массовом производстве n разгонных блоков. [2] Потребное число разгонных блоков и двигателей к ним равно: , (3) где mПГ? – суммарный грузопоток на целевую орбиту за все время реализации программа космической транспортировки. Размерность в формулах (1) и (2) – человекогода. Для перевода в любую денежную валюту необходимо результат умножить на стоимость одного человекогода для данной страны. Для России стоимость человекогода была принята равной 100000 долларов США. [2] Стоимость производства кислородно-водородного РБ [2]: , (4) где f0 = 1.04 – фактор сложности интеграции систем, зависящий от количества модулей. В нашем случае РБ представляет собой единый модуль. f8 = 2.11 – фактор продуктивности производства. Значение взято для России. Удельная стоимость выведения КА на целевую орбиту: , где -стоимость производства кислородно-водородного РБ CF - стоимость топлива; - стоимость доставки полезного груза на орбиту 200 км. Данные взяты из источника [6] - масса сухого РБ. Для расчета удельной стоимости выведения на целевую орбиту с помощью МРБ необходимо внести некоторые изменения, так как требуемое количество МРБ для реализации программы транспортировки (вывода заданной суммарной массы полезного груза) значительно меньше по сравнению с ОРБ. В данном расчете количество МРБ требуемое для реализации программы (парк) взято равным двум. Для более корректного расчета необходимо находить требуемое количество МРБ с учетом заданного уровня надежности и ресурса, но в рассматриваемом варианте модели пока этого нет. С учетом высказанного фактор снижения затрат на производство будет равен: , Удельная стоимость выведения с помощью МРБ будет равна: , где NМРБ – количество МРБ в парке; Рисунок 1. Блок-схема структуры математической модели. Зависимости для уд. стоимости с индексом МРБ являются идентичными с зависимостями для ОРБ. Погрешность стоимостных зависимостей для ОРБ около 10% [2]. Полученная модель позволяет проследить влияние изменения каждого из основных проектных параметров РБ и ДУ на величину массы ЖРД, сухой массы РБ, массы полезного груза, стоимости разработки РБ и ДУ, стоимости производства РБ и ДУ и величину удельной стоимости выведения КА на целевую орбиту. Погрешность вычислений каждой из перечисленных величин была определена по известной статистике и составила не более 7%. Анализ данных влияний позволяет сделать предварительные выводы по определению требований к оптимальной ДУ РБ, по критерию минимальной удельной стоимости выведения. При этом в модели не учитываются затраты на разработку, производство и эксплуатацию на орбите ОЗС и утилизацию отработавших ОРБ ввиду отсутствия для этого каких-либо объективных стоимостных оценок. Определение минимального суммарного грузопотока. Как уже говорилось ранее, создание МБР будет оправдано только если его использование приведет к снижению суммарных затрат на реализацию программы космической транспортировки. На рисунке 2 показан график зависимости удельной стоимости выведения на целевую орбиту с помощью МРБ и ОРБ от суммарного грузопотока. Характеристическая скорость межорбитального перехода здесь взята равной 1900 м/с. В качестве ДУ (и для МРБ и для ОРБ) выбран РД-0146, разработки КБХА (Воронеж), с базовыми характеристиками: тяга 98100 Н, Уд. импульс 4527 м/с, F`=185, Km=5.9, Pk=8.08 МПа. По графику видно, что при суммарном грузопотоке более 250 тонн применение МРБ становиться экономически более выгодно. Стоит также отметить, что при более высоких значениях характеристической скорости перехода кривая удельной стоимости МБР даже не пересекает кривую ОРБ. Этот случай для тех же условий, но для скорости 3900 м/с проиллюстрирован на рисунке 3. Одним из важнейших преимуществ МРБ перед ОРБ является то, что после выведения КА МРБ возвращается на орбиту базирования для дальнейшего использования. ОРБ же после выведения затапливается или уводится на орбиту хранения и становится объектом космического мусора. Рисунок 2. Зависимость удельной стоимости выведения от Рисунок 3. Зависимос суммарного грузопотока. ?V=2900 м/с. mпг=6100 кг. от суммарного грузоп Рисунок 4. Зависимость удельной Рисунок 5. Зависимость удельной стоимости выведения от стоимости выведения от характеристической скорости характеристической скорости межорбитального перехода. межорбитального перехода. Суммарный грузопоток mпг? – 300 тонн. Суммарный грузопоток mпг? – 50 тонн. В недалеком будущем отработавшие разгонные блоки будут представлять реальную угрозу для вновь выводимых КА. Поэтому при расчете удельной стоимости выведения с помощью ОРБ необходимо учитывать не только затраты на доставку КА на целевую орбиту, но затраты на утилизацию отработавшего ОРБ. В данном исследовании эти затраты не учитывались ввиду отсутствия каких либо объективных оценок стоимости решения этой проблемы в будущем. Для анализа влияния изменения параметров ДУ на уд. стоимость выведения в качестве определяющей величины удельного грузопотока было принято значение полученное из графика на рисунке 2 – 300 тонн. В случае учета таких факторов как стоимость утилизации ОРБ, разработка, запуск и эксплуатация на орбите ОЗС, техническое обслуживание на орбите МРБ, эта величина может существенно измениться в меньшую сторону и требует отдельного исследования. На рисунках 4 и 5 показана зависимость удельной стоимости выведения от характеристической скорости межорбитального перехода на целевую орбиту в один конец. Чем меньшей величина суммарного грузопотока, тем меньше разница удельной стоимости выведения МРБ и ОРБ. Но при значении характеристической скорости межорбитального перехода более 2500 м/с уд. стоимость выведения резко возрастает и применение МРБ становится невыгодно. Аналогичным образом модель позволяет проанализировать влияние и основных и второстепенных параметров на удельную стоимость выведения с помощью МРБ или ОРБ и найти их оптимальные значения для различных компонентов топлива и схем двигательных установок. Результаты этого анализа привести в рамках данной статьи не представляется возможным из-за большого количества полученных данных. В дальнейшем планируется ввести в модель расчет стоимости утилизации отработанных ОРБ и создания орбитальной заправочной базы для дозаправки МРБ.