Лабораторная работа по по дисциплине «Судовые автоматические приводы» по теме: «Расчёт статических и динамических характеристик электропривода постоянного тока»
реклама

МИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра САУ
ОТЧЁТ
по лабораторной работе №1
по дисциплине «Судовые автоматические приводы»
по теме: «Расчёт статических и динамических характеристик
электропривода постоянного тока»
Вариант №1
Студенты гр. 6493
Агафонова А.П.
Маевская А.Д.
Преподаватель
Доброскок Н. А.
Санкт-Петербург
2020
Цель работы: исследование статических и динамических характеристик при
работе ДПТ НВ в системе «ШИП – ДПТ»; сравнительный анализ полученных
характеристик с характеристиками, полученными в известной системе «УВ – ДПТ».
Общие теоретические положения:
В системах СЭП постоянного тока наибольшее распространение нашли
двигатели постоянного тока (ДПТ) параллельного (независимого) и смешанного
возбуждения. ДПТ последовательного возбуждения, в силу их специфических
характеристик, на судах используется крайне редко (например, для запуска аварийных
дизель-генераторов). К основным достоинствам ДПТ относят возможность плавно в
широких пределах регулировать угловую скорость вала двигателя. Одним из главных
недостатков ДПТ является относительная конструктивная сложность, уменьшающая их
надежность. ДПТ применяют как в простых системах нереверсивного СЭП с
нерегулируемой скоростью (электропривод вентиляторов, насосов), так и в сложных
следящих системах рулевого ЭП, ЭП буксирных лебедок, обеспечивающих постоянство
натяжения буксировочного троса, и др.
В общем случае все электродвигатели СЭП работают в статических (с
установившейся угловой скоростью) или динамических (при изменении угловой
скорости) режимах. К динамическим, или переходным, режимам работы
электродвигателя относятся пуск, переход с одной скорости на другую, торможение.
Статические характеристики описывают установившиеся режимы работы и
позволяют судить об электромеханических свойствах электродвигателя и возможности
его применения в составе СЭП с известными нагрузочными диаграммами. Среди
статических характеристик принято выделять механическую и скоростную
(электромеханическую) характеристики.
Механической характеристикой электродвигателя называется зависимость
между угловой скоростью и создаваемым двигателем вращающим моментом, т. е.
зависимость f M. Скоростной (электромеханической) характеристикой
электродвигателя называется зависимость между угловой скоростью и током,
протекающим по обмотке якоря.
ДПТ, как и двигатели переменного тока, имеет одну естественную механическую
характеристику, соответствующую нормальным условиям работы двигателя, и при
необходимости, диктуемой характерными условиями эксплуатации судовых
механизмов, семейство искусственных механических характеристик, формируемых УУ
посредством введения в якорную цепь или цепь обмотки возбуждения добавочных
сопротивлений, регулирования параметров напряжения питания якорной цепи или цепи
возбуждения.
В лабораторной работе исследуется вариант формирования семейства
искусственных механических характеристик регулированием параметров напряжения
питания ДПТ с независимым возбуждением (НВ) посредством ПЭ на базе статического
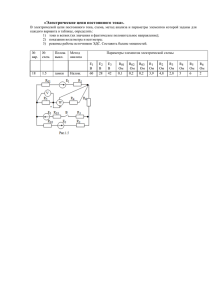
полупроводникового преобразователя. В зависимости от рода тока ИЭЭ возможны
принципиально различные подходы к построению ПЭ, три из которых в случае
управления по цепи якоря приведены на рис. 1.1, где введены следующие обозначения:
ШИП – широтно-импульсный преобразователь; УВ – управляемый выпрямитель; В –
неуправляемый выпрямитель.
2
Рис. 1.1. Варианты ПЭ: а – при питании от ИЭЭ постоянного тока; б – при питании от ИЭЭ
переменного тока на базе УВ;
в – при питании от ИЭЭ переменного тока на базе В и ШИП
В случае питания ДПТ НВ от ИЭЭ постоянного тока (аккумулятор,
электрохимический генератор, генератор постоянного тока) в качестве ПЭ используется
ШИП, который преобразует входное постоянное напряжение питания в постоянное
регулируемое напряжение на выходе. В случае питания от ИЭЭ переменного тока
(синхронный генератор) в качестве ПЭ используется либо УВ, преобразующий
трехфазное синусоидальное напряжение частоты 50 Гц постоянного действующего
значения в постоянное регулируемое напряжение на выходе, либо система «В – ШИП»,
в котором происходит двукратное преобразование. Сначала В преобразует трехфазное
синусоидальное напряжение частоты 50 Гц постоянного действующего значения в
постоянное напряжение на выходе с фиксированным средним значением, после чего
ШИП преобразует полученное постоянное напряжение в постоянное регулируемое
напряжение на выходе.
Кратко рассмотрим математическую модель ДПТ НВ, которая, как и модель
любой электрической машины, состоит из двух частей: электромагнитной и
механической. У ДПТ НВ в общем случае имеются две независимые электрические
цепи: цепь якоря, в которую последовательно могут включаться обмотка
дополнительных полюсов и компенсационная обмотка, и цепь возбуждения. Обе цепи
могут получать питание от независимых источников. Система дифференциальных
уравнений, описывающая электромагнитные процессы в ДПТ НВ может быть
представлена в следующем виде:
𝑢в = 𝑖в 𝑅в + 𝐿в
𝑑𝑖в
;
𝑑𝑡
𝑑𝑖я
+𝑐𝑒 Ф𝜔;
𝑑𝑡
𝑀 = 𝑐𝑀 Ф𝑖я .
𝑢я = 𝑖я 𝑅я + 𝐿я
{
где 𝑢я – напряжение питания цепи якоря; 𝑢в – напряжение питания цепи возбуждения;
𝑒 – ЭДС вращения; 𝑖я – ток якорной цепи; – угловая скорость вращения якоря; 𝑅я и 𝐿я
– суммарные активное сопротивление и индуктивность цепи якоря соответственно; 𝑅в и
𝐿в – суммарные активное сопротивление и индуктивность цепи возбуждения
соответственно; 𝑐𝑒 и 𝑐𝑀 – конструктивные постоянная ЭДС и момента соответственно,
зависящие от числа пар полюсов, активных проводников и параллельных ветвей якоря;
Φ – магнитный поток, который определяется нелинейной зависимостью от тока
возбуждения (Ф = 𝑓(𝑖в )), обусловленной кривой намагничивания; M –
3
электромагнитный момент. Стоит отметить, что первые два уравнения системы
составлены на основе закона Кирхгофа для цепи возбуждения и якоря.
Из анализа данной системы можно получить механическую характеристику ДПТ
НВ, прировняв нолю все производные:
𝜔=
𝑢я
𝑅я
−
𝑀
𝑐𝑒 Ф 𝑐𝑒 𝑐𝑀 Ф2
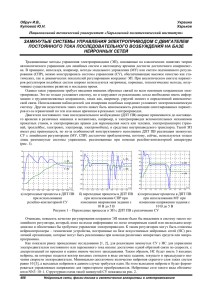
Анализ уравнения говорит о том, что естественная механическая характеристика
ДПТ НВ при постоянном значении магнитного потока представляет собой прямую
линию. Формирование семейства искусственных механических характеристик
управлением напряжения возможно либо со стороны якорной цепи, либо со стороны
обмотки возбуждения. На рис. 1.2 приведен вид естественных и искусственных
механических характеристик для двух указанных случаев, где 0 – угловая скорость
идеального холостого хода.
Рис 1.2. Механические характеристика ДПТ НВ
Из приведенных графиков и анализа выражения следует, что при изменении
напряжения, подводимого к цепи якоря, пропорционально изменяется скорость
холостого хода, жесткость механической характеристики при этом сохраняется. При
изменении же напряжения, подводимого к цепи возбуждения, изменяется как скорость
холостого хода, так и жесткость механической характеристики.
Анализ динамических режимов работы ДПТ НВ может производиться по системе
уравнений, дополненной уравнением движения, которое записывается на основании
закона Ньютона для вращательного движения:
𝑀 − 𝑀𝑐 = 𝐽
𝑑𝜔
,
𝑑𝑡
где J – постоянный суммарный момент инерции вращающихся масс.
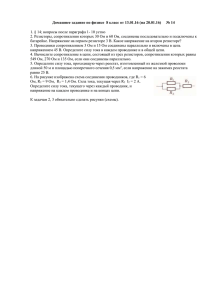
Для управления напряжением питания, подводимого к цепи якоря или цепи
возбуждения, наибольшее распространение получили схемы с ПЭ на основе ШИП,
простейшая схема которого при питании от ИЭЭ постоянного тока приведена на рис.
1.3, где введены следующие обозначения: VT1 ... VT4 – силовые полупроводниковые
ключи (например, IGBT); VD1 ... VD4 – обратные диоды.
4
Рис. 1.3. Схема ШИП при питании от ИЭЭ постоянного тока
При управлении ШИП обычно используются три основных алгоритма
переключения полупроводниковых ключей: симметричный, несимметричный и
поочередный.
При симметричном алгоритме управления ШИП, поочередно переключаются все
четыре полупроводниковых ключа ШИП. При этом к цепи якоря прикладывается
полное напряжение источника с переменной полярностью. Положительная полярность
достигается, когда в проводящем состоянии находятся полупроводниковые ключи VT1
и VT4, отрицательная – тогда, когда в проводящем состоянии – ключи VT2 и VT3. При
положительной полярности ток в цепи якоря увеличивается, а при отрицательной –
уменьшается.
При несимметричном алгоритме управления ШИП к цепи якоря прикладывается
однополярное напряжение. При данном алгоритме при прямом протекании тока в цепи
якоря полупроводниковый ключ VT1 всегда находится в проводящем состоянии, а ключ
VT2 всегда закрыт. Поочередно коммутируются ключи VT3 и VT4. В тот момент, когда
в проводящем состоянии находится ключ VT4, к цепи якоря ДПТ НВ прикладывается
полное напряжение источника с положительной полярностью, что приводит к
возрастанию тока якоря. Если в проводящем состоянии находится ключ VT3, то на
выходе ШИП формируется нулевое напряжение. При этом через цепь якоря,
транзисторы VT3 и VT1 образуется разрядный контур.
В общем случае ШИП с позиций теории управления может рассматриваться как
нелинейный элемент со статической характеристикой типа трех-позиционное реле:
𝑢шип
+ 𝑈ян , открыты ключи 𝑉𝑇1 и 𝑉𝑇4;
= { 0, открыты ключи 𝑉𝑇1 и 𝑉𝑇3;
− 𝑈ян , открыты ключи 𝑉𝑇2 и 𝑉𝑇3.
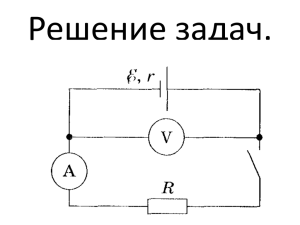
При этом состояние нелинейного элемента зависит от результатов сравнения
заданного УУ напряжения uз на выходе ШИП и высокочастотного опорного сигнала uоп,
как это показано на рис. 1.4 для управления по цепи якоря ДПТ НВ.
Рис. 1.4. Вибрационная линеаризация
5
Приведенная структура (см. рис. 1.4) соответствует физической реализации
вибрационной линеаризации: на вход нелинейного элемента кроме медленно
изменяющегося сигнала задания подается высокочастотное аддитивное периодическое
воздействие. В результате такой линеаризации статическая характеристика ШИП вместе
со своей системой управления изменяется от характеристики типа трехпозиционное
реле к характеристике типа насыщение. При этом ширина линейной зоны
характеристики
типа
насыщение
определяется
удвоенной
амплитудой
высокочастотного аддитивного воздействия, а величина полки насыщения –
напряжению питания ШИП. В случае, если задающее воздействие выходит за пределы
амплитуды высокочастотного аддитивного воздействия, то ШИП перестает работать в
линейной зоне.
Добавление высокочастотного аддитивного воздействия к задающему сигналу с
одной стороны используется для реализации алгоритма управления, а с другой
позволяет получить эквивалентную характеристику системы, при которой линейному
изменению задания соответствует линейное изменение среднего значения напряжения,
подаваемого на цепь якоря ДПТ НВ.
6
Выполнение работы:
Параметры модели ДПТ НВ и ИЭЭ согласно варианту (№1):
Pн,
кВт
nн,
об/мин
Uян, В
3,67
1750
240
Rя, Ом
Lя, Гн
0,9875 0,0124
J,
кг·м2
Uвн, В
Rв, Ом
Lв, Гн
Lяв, Гн
300
102,3
20,82
0,8355 0,1239
Структурная модель исследования ДПТ НВ:
Рис. 1. Общий вид модели
Выбираем Preset Model 5.
Номинальное значение момента ДПТ НВ:
𝑀н =
𝑃н
𝑃н
3670
= 30
= 30
= 20,04 (Н ∙ м)
𝜔н
𝜋𝑛н
𝜋 ∙ 1750
В качестве источника напряжения ДПТ НВ выбираем Ideal Source. Также
устанавливаем ступенчатое задание момента. Получим динамические характеристики
(рис. 2).
7
Рис. 2. Переходные характеристики при ступенчатом нарастании момента, Ideal
Source
Из рис. 2 видно, что установившееся значения скорости и момента равны
об
номинальным значениям скорости и момента (𝑛н = 1833 мин , 𝑀н = 21,08 Н ∙ м).
Отсюда же 𝐼ян = 20,85 А. Тогда можно вычислить конструктивные постоянные
противо-ЭДС и момента:
𝑘М = 𝑐М Фн =
𝑘𝑒 = 𝑐𝑒 Фн = 30
𝑀н 21,08
=
= 1,01
𝐼ян 20,85
𝑈ян − 𝑅я 𝐼ян
240 − 0,9875 ∙ 20,85
= 30
= 1,2
𝜋𝑛н
𝜋 ∙ 1750
Установим линейное нарастание момента и построим те же характеристики
(рис.3):
8
Рис. 3. Переходные характеристики при линейном нарастании момента, Ideal Source
В качестве источника напряжения ДПТ НВ выбираем Thyristor Rectifire.
Устанавливаем линейное задание момента. Построим динамические характеристики
(рис. 4):
Рис. 4. Переходные характеристики при линейном задании момента, Thyristor Rectifire
В качестве источника напряжения ДПТ НВ выбираем PWM Source. Установив
линейное задание момента, строим динамические характеристики (рис. 6):
9
Рис. 6. Переходные характеристики при линейном задании момента, PWM Source
Рис. 7
Рис. 8
Сравнивая вид динамических характеристик ДПТ НВ при питании от тиристорного
выпрямителя и ШИП можно сказать, что в них нет существенных различий. Однако в
случае тиристорного выпрямителя появляются пульсации (рис. 7), а при ШИП кривые
скорости и тока перестают быть гладкими, т.е. там также имеются пульсации только
меньшей амплитуды и меньшего периода (рис. 8).
Возвращаемся к Ideal Source для построения механических характеристик.
Построим статическую характеристику ДПТ НВ при различных значениях напряжения
питания (Ф = 𝑐𝑜𝑛𝑠𝑡):
10
Рис. 9. Механическая характеристика ДПТ НВ (Ф = const)
Построим статическую характеристику ДПТ НВ при различных значениях
напряжения обмотки возбуждения (Ф = 𝑣𝑎𝑟):
Рис.10. Механическая характеристика ДПТ НВ (Ф = var)
Используя уравнения, описывающие систему ДПТ НВ, соберём модель в Simulink
(рис. 11) для сравнения результатов моделирования переходных процессов пуска ДПТ
НВ, полученных по данной системе уравнений и по модели DC Machine.
11
𝑢в = 𝑖в 𝑅в + 𝐿в
𝑑𝑖в
;
𝑑𝑡
𝑑𝑖я
+𝑐𝑒 Ф𝜔;
𝑑𝑡
𝑀 = 𝑐𝑀 Ф𝑖я .
𝑢я = 𝑖я 𝑅я + 𝐿я
{
Рис. 11. Структурная схема системы
Рис. 12. График переходных процессов
Переходные процессы имеют другой вид, однако значение тока устанавливается
на то же значение 𝐼ян = 20,85 А.
Выводы: в ходе данной лабораторной работы мы исследовали модель ДПТ НВ в
виде DC Machine. С помощью данной модели нам удалось получить динамические и
статические характеристики при питании от разных источников. Так, мы выяснили, что
12
при использовании идеального источника на графиках переходных процессов будут
отсутствовать пульсации, тогда как включая тиристорный выпрямитель или ШИП мы
получали пульсации разных периодов и амплитуд на графиках скорости и тока.
Также
были
построены
естественные
и
искусственные
механические
характеристики. Регулирование механических характеристик управлением напряжения
было проведено со стороны якорной цепи и со стороны обмотки возбуждения.
Искусственные характеристики совпадают с теоретическими.
Была построена математическая модель при управлении по цепи якоря и
постоянном значении потока возбуждения (Ф = const), исходя из уравнений,
описывающих систему ДПТ НВ. Результаты моделирования переходных процессов
совпали с полученными ранее по модели DC Machine.
13