Разбор задачи по моделированию
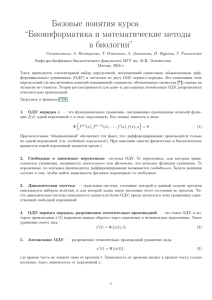
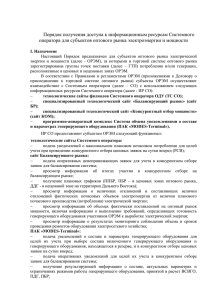
реклама

Задача (из раздела движение в поле тяжести) Построить траекторию движения тела, брошенного горизонтально с начальной скоростью v0 (2 м/с) с высоты H0 (50 м) без учета и с учетом сопротивления воздуха. Что это за кривая? Зависит ли время падения на землю от сопротивления воздуха? Какова зависимость горизонтальной скорости тела от времени? Бросают стальной шарик радиусом 0,01 м, плотность стали ρ = 7,8 г/м3. Сила сопротивления F = k∙v, k = 10-4 кг/м. Какова зависимость горизонтальной скорости тела от времени без учета и с учетом сопротивления воздуха? На каком расстоянии от точки бросания тело упадет на землю? Прежде чем приступить к выполнению задания, необходимо выяснить: 1) В каком разделе физики изучается явление (закон); 2) Какое физическое явление или закон лежат в основе данной задачи; 3) Запишите современную формулировку явления (закона), основные дифференциальные уравнения, описывающие явление (закон). Решение задачи представляем в редакторе электронных таблиц OO Calc. Расчет искомых физических величин ведем в зависимости от различных параметров (начальных условий и коэффициентов). Результаты проведенных расчетов должны продемонстрировать ответы на вопросы поставленной задачи с различными параметрами в виде таблиц и графиков. Работа предварительная (до применения компьютера) В соответствии с теорией, записываем систему дифференциальных уравнений (ОДУ) первого порядка, соответствующую задаче Далее преобразуем систему ОДУ в схему Эйлера для численного решения этой системы. В электронной таблице необходимо: организовать ввод начальных условий задачи; сформировать таблицу значений искомых величин; построить графики искомых зависимостей; Все графики должны быть оформлены в одном стиле: подписаны оси с указанием наименования и размерности физической величины, сделана разметку осей, подписан график в целом. Графики должны отражать зависимость изучаемых величин от различных факторов, согласно теории, изложенной в пояснительной записке. Внимание: Размерность величин в ячейки вводить не надо. Более того многие величины и константы для удобства могут иметь произвольные (абстрактные) значения. 1 Описание движения в поле тяжести с помощью ОДУ Физические явления обычно описываются одним или несколькими обыкновенными дифференциальными уравнениями (ОДУ). Необходимо проанализировав условие задачи, записать систему ОДУ и дополнительные условия в соответствии с порядком уравнения и разрешить уравнения относительно старшей производной. Рассмотрим движение тела, брошенного с начальной горизонтальной скоростью V0. Если не учитывать сопротивления воздуха, на такое тело действует только сила тяжести Fт=mg (см. рисунок). Уравнение движения тела получается из рассмотрения второго закона Ньютона: d 2r ma = m g или m 2 = mg dt (1) В общем виде: m ⃗a = ∑ F i Выберем систему координат, начало отсчета которой, связано с землей, ось у направлена вверх. Тогда из (1) в проекциях на оси координат имеем: d 2x m 2 =0 и dt . (2) Начальные условия: при t=0 (либо есть в условии, либо вы их придумайте сами): x= 0, dx dy = V 0 , y= H , =0 dt dt . Для понижения порядка ОДУ вводим новые переменные и переходим к системе ОДУ первого порядка: dx dt Vx m dVx 0 dt (3) dy Vy dt dV m y mg dt 2 Первое и третье уравнение в этой системе будут такими же без изменений, у всех, во всех задачах! Для решения задачи с использованием электронных таблиц воспользуемся определением производной через приращение функции: dx x lim dt t 0 t Выразим искомые величины через бесконечно малое приращение времени dt. Запишем схему Эйлера, которая позволяет решать систему ОДУ численно: ti 1 ti dt xi 1 xi dt Vxi Vxi 1 Vxi dt 0 y y dt V i yi i 1 Vyi 1 Vyi dt g (4) Где dt - шаг по времени. Значение индекса i определяет предыдущее значение функции, а i+1 последующее. Так как проекция ускорения на ось х равна нулю и скорость Vx не меняется, третье уравнение в системе (4) можно опустить. Учитывая начальные условия, получим V x,0= V 0 , x 0= 0, V y,0= 0 , y 0= H . (5) Таким образом, подставляя в схему Эйлера (4) начальные условия (5), можно получить значение координат и скоростей в момент времени t, а с их помощью – значения переменных в следующий момент времени и т.д. Расчет (c применениям компьютера) Рассмотренная ниже последовательность действий показывает, как можно использовать редактор электронных таблиц для расчета значений функций x(t ) , y (t ) ,Vx (t ) ,Vy (t ) в соответствии с уравнениями схемы Эйлера (4), и построить траекторию движения тела. 1) Запустить табличный редактор Open Office.Org. Calc. 2) Заносим в ячейках начальные условия (5), шаг по времени dt и прочие параметры 3 3) В ячейках А14-Е14 подписываем заголовки столбцов x(t ) , y(t) ,Vx ( t) ,Vy ( t) ; Нумерация согласно примера задачи. таблицы t, 4) В ячейках А15-Е15 вводим начальные значение величин, согласно (5). 5) В столбце А рассчитываем время. В ячейке А15 вводим 0 — начальное значение времени, а в ячейке А16 записываем формулу =А15+0,05, где 0,05 значение dt – шага времени (или используйте абсолютный адрес ячейки с шагом по времени $B$8, например =A15+$B$8). Заполняем значения времени. Щелкаем на ячейке А16. Перемещаем курсор в правый нижний угол ячейки А16, пока курсор на превратится в знак «+», зажимаем левую кнопку мыши и протягиваем вниз, примерно до ячейки А79. 6) В столбце B рассчитываем горизонтальную составляющую скорости Vx. В соответствие с (4) в ячейке B16 заносим =B15+$B$8*0, где 0 - это нулевое горизонтальное ускорение, а ячейка B8 содержит значение шага по времени, в нашем примере 0,05, значение в которой не должно изменяться. 7) В столбце С рассчитываем вертикальную составляющую скорости Vy. В ячейке С16 записываем формулу =С15-$B$8*$B$3, где $B$3 - это вертикальное ускорение g. 8) В столбце D рассчитываем координату х. В ячейке D16 набираем формулу =D15+$B$8*B16. 9) В столбце E рассчитываем координату у. В ячейке E16 аналогично записываем формулу =E15+$B$8*C16. 10) Используя маркер автозаполнения «+», растягиваем значения ячеек В-Е последовательно до 79 строки включительно. Получаем таблицу значений. При заполнении таблицы значений необходимо обратить внимание на значение координаты Y, которая не может быть <0 (мы принимаем поверхность земли за нулевой уровень). Для построения траектории движения тела необходимо выделить диапазон ячеек D15:E79. На панели инструментов выбрать пиктограмму диаграмма. В открывшемся окне мастера диаграмм, выбрать тип диаграммы <Диаграмма XY> и вид <линии и точки>. Нажимая последовательно кнопку <Далее>, подписываем название диаграммы и осей. Нажав кнопку готово, получаем траекторию движения тела. 4 Зависимость Y(X) 60 50 40 Y 30 20 10 0 0 1 2 3 4 5 6 7 -10 X Это траектория - парабола. Из полученной зависимости мы делаем вывод, что тело упадет на землю на расстоянии приблизительно 6,5 м от точки бросания (координата Y =0). Зависимость горизонтальной скорости тела от времени строится по точкам диапазона ячеек A15:B79. 5 Зависимость Vx(t) 2,5 2 1,5 1 0,5 0 0 0,5 1 1,5 2 2,5 3 3,5 Для учета сопротивления воздуха, во второй закон Ньютона (1) нужно включить еще одну внешнюю силу Fсопр. кV Тогда, (6). ma mg kV (7). Этот случай описывается следующей системой ОДУ первого порядка: dx dt = Vx (8) m dVx = kV x dt dy = Vy dt dV y m = mg kVy dt Эта же система уравнений будет описывать и случай вертикального движения тела (только Vx = V0=0 и два первых уравнения в системе (8) можно не рассматривать), и случай движения тела с начальной скоростью, направленной под углом к горизонту. Пример 2: Движение в поле тяготения Движение тела массой m1 в поле тяготения массивного тела М происходит под действием гравитационной силы: Fg = γ m1 M r r3 (9) Где r - радиус-вектор между взаимодействующими телами (направлен к m1), -гравитационная постоянная. Будем считать, что M>>m1. Тело массой М γ 6 в таком случае является неподвижным центром тяготения. Тогда уравнение движения тела массой m1: m1a = γ m1M r r3 (10) Совместим начало системы координат (0,0) с центром масс массивного тела М. Тогда уравнение (10) в проекциях будет иметь вид: m1M m a = γ x 1 x (11) r3 m a = γ m1M y 1 y r3 где x, y – координаты тела массой m1, r = x 2 y 2 . После замены переменных из (11) получается система ОДУ первого порядка: dx dt = Vx m dVx = γ Mm1 x 1 dt r3 dy = Vy dt dV 1 m1 y = γ Mm y dt r3 (12) Для численного интегрирования этой системы записываем схему Эйлера: ti+1 = ti + dt x = x + dt V i x,i i+1 M Vx,i+1 = Vx,i γ r 3 xi dt y = y + dt V i y,i i+1 M V = V γ y dt y,i+ 1 y,i i r3 r = xi2 + yi2 (13) Удобно решать эту систему со следующими начальными условиями: х(0)=х0; y(0)=y0=0; Vх(0)= Vх,0=0; Vy(0)= Vy,0=V; При этом тело массой m1 будет двигаться против часовой стрелки вокруг массивного тела М по эллипсу, оси которого будут параллельны осям координат. Планеты Солнечной системы, движения которых моделируются в задачах, движутся с периодами, измеряющимися годами, по орбитам, оси которых измеряются миллионами километров. Таким образом, моделирование «в реальном времени» представляется неразумным. Разумные времена и размеры орбит получаются, если взять γ=1, М=1200, х(0)=30, V~5. 7 Если в задаче рассматривается движение вокруг тяготеющего центра М двух невзаимодействующих планет с массами m1 и m2, уравнение движения, подобное (10), записывается для каждого тела: m1M r1 r3 m1a1 = γ 1 (14) mM m2 a2 = γ 2 r2 r3 2 Если учитывать взаимодействие планет с массами m1 и m2 не только с Солнцем, но и друг с другом, необходимо учесть гравитационные силы взаимодействия между ними (см. рисунок). На первую планету со стороны второй действует сила: F12 = γ m1m2 r12 r 3 (15) 12 Вектор r12 имеет координаты и длину r12 = (x2 x1 , y2 y1 ) r12 = (x2 x1 )2 +(y2 y1 )2 (16) Проекции силы F12 на оси координат F12 ,x = γ m1m2 (x2 x1 ) r 3 12 mm F12 ,y = γ 1 2 (y2 y1 ) r 3 (17) 12 На вторую планету со стороны первой действует сила закону Ньютона: (18) F21 = F12 F21 = γ m1m2 r12 r 3 F 21 . По третьему (19) 12 3. Пример 3: Движение заряженных частиц в электрических и магнитных полях. В электрическом поле на частицу заряда e массой m действует электрическая сила Fe e E . Где Е – напряженность электрического поля. В магнитном поле на частицу, движущуюся со скоростью v действует сила Лоренца Fm ev B, где В- индукция магнитного поля. Таким образом, уравнение движения частицы в электрических и магнитных полях в векторной форме имеет вид: dv m eE e v B dt 8 В случае скрещенных однородных стационарных полей, если вектор Е направлен по оси y, а вектор магнитной индукции В – по оси z, после замены переменных v x x, v y y , (х,у –координаты заряженной частицы), получается система уравнений: dx dt v x dy v y dt dv x e vy B dt m dv y e E e vx B dt m m Удобно x(0) 0; решать эту систему ОДУ с начальными условиями y (0) 0; v x (0) v0 ; v y (0) 0. Разностная схема для метода Эйлера: t i 1 t i t xi 1 xi t v xi yi 1 yi t v yi eB m v yi t e( E v xi B) / m v x ,i 1 v xi t v yi v y ,i 1 Движение в поле рассеивающего центра. Движение заряженной частицы в неоднородном поле продемонстрируем на примере рассеяния. Рассмотрим частицу с зарядом e1, массой m, которая налетает на заряженный центр с зарядом e2, массы M>>m (см. рис.). На рисунке v0 –начальная скорость частицы, p –прицельное расстояние, θ – угол рассеяния. Сила взаимодействия между частицей и центром находится по закону Кулона e1 e2 r F r3 , где r – расстояние между центром и частицей. Если центр находится в точке с координатами (x0,y0), а (x,y) – координаты частицы, то проекции кулоновской силы 9 e1 e2 ( x x0 ) , r3 e1 e2 ( y y0 ) 2 2 , где r ( x x0 ) ( y y0 ) . 3 r Удобно связать начало координат с рассеивающим центром, тогда x0=0,y0=0 и систему уравнений, описывающую движение заряженной частицы в данном случае можно записать в виде Fx Fy dx dt v x dy v y dt dv x e1 e2 x dt m r3 dv y e1 e2 y dt m r3 r x 2 y 2 и решать с начальными условиями x= -L, y=p, vx=v, vy=0. 4. Механические колебания Математический маятник (шарик на невесомой нити), выведенный из равновесия, может колебаться под действием возвращающей силы, величина которой, можно считать, пропорциональна отклонению от положения равновесия: m a = mg sin(x) L (20) Здесь х – угол отклонения маятника от положения устойчивого равновесия, L – длина маятника, g – ускорение свободного падения. Таким образом, колебания математического маятника без учета силы трения и при отсутствии вынуждающей силы описываются уравнением: x+ω02sin(x)= 0, ω0 = g L (21) Здесь ω0 – собственная частота колебаний. Для решения уравнения второго порядка d 2x = ω0sin(x) dt 2 (22) Обозначим скорость маятника p=dx/dt и сведем ОДУ второго порядка к системе: 10 dp dt = ω0sin(x) (23) dx = p dt которую можно решать с разными начальными условиями. Для учета сопротивления воздуха в правую часть уравнения (20) добавляют слагаемое Fсопр 2bx , при наличии периодической вынуждающей силы – слагаемое F F0 cos( t ) , где ω – частота вынуждающей силы. Программа численного решения системы ОДУ (23) аналогична программе расчета характеристик движения тела в поле тяжести. Запишем схему Эйлера, которая позволяет решать систему ОДУ численно: t i 1 t i t xi 1 xi t pi pi 1 pi t w0 sin( xi 1 ) (4) 11