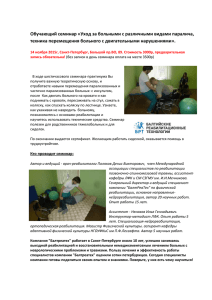
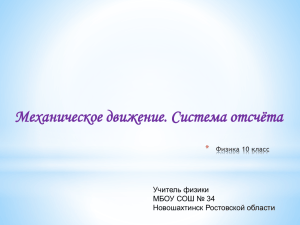
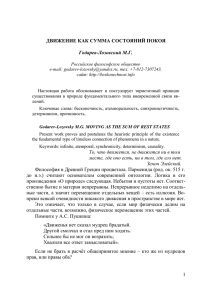
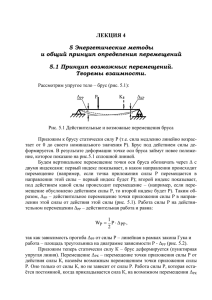
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В УПРУГИХ СИСТЕМАХ Обобщенные силы и перемещения Начало возможных перемещений и закон сохранения энергии позволили получить другие методы определения перемещений в стержневых системах. Как известно из теоретической механики, работа постоянной силы Р на перемещении по ее направлению равна произведению величины силы на указанное перемещение: А Р В задачах сопротивления материалов и строительной механики внешняя нагрузка отличается большим разнообразием и обычно представляет собой группы сил. Выражение для работы группы постоянных сил также можно представить в виде произведения двух величин (1) А Р Р, в котором множитель Р зависит только от сил группы и называется обобщенной силой, а Р зависит от перемещений и называется обобщенным перемещением. Таким образом, под обобщенной силой будем понимать любую нагрузку (сосредоточенные силы, сосредоточенные пары, распределенную нагрузку), а под обобщенным перемещением - тот вид перемещения, на котором обобщенная сила производит работу. Рассмотрим некоторые примеры часто встречающихся обобщенных сил и обобщенных перемещений. 1. На рис. 1 показана обобщенная сила, состоящая из двух равных по величине противоположных сил Р , приложенных в точках А и В и направленных по одной прямой. Предположим. Что точки приложения сил А и В переместились в направлении ВА на отрезки 1 и 2 . Очевидно, работа системы постоянных сил на этих перемещениях А Р 1 Р 2 Р 1 2 Р Р , (2) где Р 1 2 l – изменение расстояния l между точками приложения сил. Рис. 1 Следовательно, P в данном случае – обобщенная сила, а изменение l длины отрезка АВ - обобщенное перемещение. 2. Пусть группа сил состоит из двух пар сил, момент каждой из которых M P a (рис. 2). Допустим, что элемент АВ повернулся на угол d1 , а элемент CD на угол d 2 . Рис. 2. Легко убедиться, что обобщенной силой является момент пары М , а обобщенным перемещением – изменение угла между элементами АВ и CD : Р d1 d 2 Рассматривая достаточно жесткие конструкции, деформации которых следуют закону Гука, можно на основании принципа независимости действия сил определить полные перемещения точек как сумму перемещений, вызванных отдельными нагрузками. Рис. 2 Для показанной на рис. 3 балки прогиб и угол поворота сечения В можно записать в виде Р РР РQ PM Р; (3) M MР MQ MM где Р - полное перемещение сечения В в направлении действия силы РР - перемещение сечения В в направлении действия силы Р от действия силы Р ; РQ - перемещение сечения В в направлении действия силы Р от действия силы Q ; РM - перемещение сечения В в направлении действия силы Р от действия момента М ; M - полное перемещение сечения B по направлению пары М (угол поворота). MР - перемещение сечения В в направлении действия пары М от действия силы Р ; МQ - перемещение сечения В в направлении действия пары М от действия силы Q ; МM - перемещение сечения В в направлении действия пары М от действия пары М ; Перемещение, вызванное единичной силой ( P 1 ) или единичной парой ( М 1 ), будем обозначать буквой и называть удельным. При этом условимся считать единичные силы и единичные пары, вызывающие перемещения , безразмерными. Если единичная сила P 1 вызвала удельное перемещение Р , то на основании принципа независимости действия сил полное перемещение, вызванное силой Р , (4) Р Р Р Работа внешних сил При деформации конструкций происходит перемещение точек приложения внешних сил, при этом внешние силы на заданных перемещениях совершают работу. Вычислим работу некоторой обобщенной силы Р (рис. 4), которая возрастает от нуля до заданной величины достаточно медленно, чтобы можно было пренебречь силами инерции перемещаемых масс. Такую нагрузку принято называть статической. Рис. 3 Пусть в произвольный момент деформации силе Р соответствует обобщенное перемещение . Бесконечно малое приращение силы на величину dP вызовет бесконечно малое приращение перемещения d . Очевидно, что элементарная работа внешней силы, если пренебречь бесконечно малыми величинами второго порядка, dA ( P dP ) d P d Полная работа, совершенная статически приложенной обобщенной силой Р , вызвавшей обобщенное перемещение , (5) A P d Полученный интеграл представляет собой площадь диаграммы P , которая для линейно деформированных систем является площадью треугольника с основанием окончательного значения перемещения и высотой окончательного значения силы Р А Р (6) 2 Рис. 4 Таким образом, действительная работа при статическом действии обобщенной силы на упругую систему равна половине произведения окончательного значения силы на окончательное значение соответствующего ей обобщенного перемещения (теорема Клапейрона). В случае статического действия на упругую систему нескольких обобщенных сил работа деформаций равна полусумме произведений окончательного значения каждой силы на окончательное значение соответствующего суммарного перемещения 1 А Pi i 2 (7) и не зависит от порядка нагружения системы. Работа внутренних сил Внутренние силы, возникающие при деформировании упругих систем, также совершают работу. Рассмотрим элемент стержня длиной dl (рис. 6). В общем случае для плоского изгиба действие удаленных частей стержня на оставленный элемент выражается равнодействующими осевыми силами N , поперечными силами Q и изгибающими моментами M . Эти усилия, показанные на рис. 6 сплошными линиями, по отношению к выделенному элементу являются внешними. Рис. 5 Внутренние силы, показанные штриховыми линиями, препятствуют деформации, вызываемой внешними силами, равны им по величине и обратны по направлению. Вычислим работу, совершенную отдельно каждым внутренним силовым фактором. Пусть элемент испытывает только действие осевых усилий, равномерно распределенных по сечению (рис. 6). Рис. 6 Удлинение элемента в результате этого ds N ds , EF Работа, постепенно возрастающих от нуля до величины N внутренних сил на этом перемещении. 1 N 2 ds dW N N ds 2 2 E F (8) Работа внутренних сил отрицательна, поэтому в полученной формуле стоит знак «минус». Рассмотрим теперь элемент, находящийся под действием изгибающих моментов (рис. 8). Взаимный угол поворота сечений элемента d ds 1 ds M . EJ Работа изгибающих моментов 1 M 2 ds dW N M d 2 2 E J (9) Рис. 7 Работу постепенно возрастающих внутренних поперечных сил с учетом распределения касательных напряжений по поперечному сечению и на основании закона Гука можно записать в следующем виде 1 Q 2 ds dWQ k y , 2 GF (10) где k y - коэффициент, зависящий от формы поперечного сечения. Если стержень подвергается кручению, элементарная работа постепенно возрастающих крутящих моментов 2 M КР ds 1 dW M КР d 2 G JK (11) Наконец в общем случае действия на брус в сечениях имеем шесть внутренних силовых факторов, работу которых можно определить по формуле M y2 ds 2 M z2 ds M KP ds W S 2 E J y S 2 E Jz S 2G JK N ds 2 S 2 E F ky S Q 2y ds 2G F kz S (12) ds 2G F Q 2z Начало возможных перемещений Начало возможных перемещений, являясь общим принципом механики, имеет важнейшее значение для теории упругих систем. Применительно к ним этот принцип можно сформулировать следующим образом: если система находится в равновесии под действием приложенной нагрузки, то сумма работ внешних и внутренних сил на возможных бесконечно малых перемещениях системы равна нулю. Pi im Wim 0 , (13) где Pi - внешние силы; im - возможные перемещения этих сил; Wim работа внутренних сил. Заметим, что в процессе совершения системой возможного перемещения величина и направление внешних и внутренних сил остаются неизменными. Поэтому при вычислении работ следует брать на половину, а полную величину произведения соответствующих сил и перемещений. Рассмотрим два состояния какой-либо системы, находящейся в равновесии (рис. 9). В состоянии а система деформируется обобщенной силой Ра (рис. 9, а), в состоянии b - силой Pb (рис. 9, б). Работа сил состояния а на перемещениях состояния b , как и работа сил состояния b на перемещениях состояния а , будет возможной. Aab Pa ab Aba Pb ba (14) Вычислим теперь возможную работу внутренних сил состояния а на перемещениях, вызванных нагрузкой состояния b . Для этого рассмотрим произвольный элемент стержня длиной ds в обоих случаях. Для плоского изгиба действие удаленных частей на элемент выражается системой усилий Na , Q a , M a (рис. 10, а). Внутренние усилия имеют направления, противоположные внешним (показаны штриховыми линиями). На рис. 10, б показаны внешние усилия N b , Q b , M b , действующие на элемент ds в состоянии b . Определим деформации, вызванные этими усилиями. Очевидно удлинение элемента ds , вызванное силами N b ds b N b ds . EF Работа внутренних осевых сил N a на этом возможном перемещении N a ds b N a N b ds . EF (15) Взаимный угол поворота граней элемента, вызванный парами M b , d b M b ds . EJ Работа внутренних изгибающих моментов M a на этом перемещении M a d b M a M b ds . EJ (16) Аналогично определяем работу поперечных сил Q a на перемещениях, вызванных силами Q b Q a ds b k Q a Q b ds . (17) GF Суммируя полученные работы, получаем возможную работу внутренних сил, приложенных к элементу ds стержня, на перемещениях, вызванной другой, вполне произвольной нагрузкой, отмеченной индексом b dWab M a M b ds N a N b ds Q Q b ds k a (18) EJ EF GF Просуммировав элементарные работы в пределах стержня, получим полное значение возможной работы внутренних сил: M a M b ds N N ds a b EJ EF s s (19) Q Q ds k a b GF s Wab Применим начало возможных перемещений, суммируя работу внутренних и внешних сил на возможных перемещениях системы, и получим общее выражение начала возможных перемещений для плоской упругой стержневой системы: N N ds M M b ds a b Pa ab a E J E F s s Q Q ds k a b 0 G F s (20) Т. е., если упругая система находится в равновесии, то работа внешних и внутренних сил в состоянии а на возможных перемещениях, вызванных другой, вполне произвольной нагрузкой, отмеченной индексом b , равна нулю. Теоремы о взаимности работ и перемещений Запишем выражения начала возможных перемещений для балки, показанной на рис. 2.2.9, приняв для состояния а в качестве возможных перемещения, вызванные состоянием b , а для состояния b - перемещения, вызванные состоянием а . N N ds M M b ds Pa ab a a b EJ EF s s Q Q ds k a b 0 GF s (21) N N ds M M a ds Pb ba b b a E J E F s s Q Q ds k b a 0 G F s (22) Так как выражения работ внутренних сил одинаковы, то очевидно, что (23) Pa ab Pb ba Полученное выражение носит название теоремы о взаимности работ (теоремы Бетти). Она формулируется следующим образом: возможная работа внешних (или внутренних) сил состояния а на перемещениях состояния b равна возможной работе внешних (или внутренних) сил состояния b на перемещениях состояния а . Применим теорему о взаимности работ к частному случаю нагружения, когда в обоих состояниях системы приложено по одной единичной обобщенной силе Р1 1 и Р2 1 . Рис. 11 На основании теоремы о взаимности работ получаем равенство ab ba , (24) которое носит название теоремы о взаимности перемещений (теоремы Максвелла). Формулируется она так: перемещение точки приложения первой силы по ее направлению, вызванное действием второй единичной силы, равно перемещению точки приложения второй силы по ее направлению, вызванному действием первой единичной силы. Теоремы о взаимности работ и перемещений существенно упрощают решение многих задач при определении перемещений. Пользуясь теоремой о взаимности работ, определим прогиб 21 балки посредине пролета при действии на опоре момента М (рис. 12, а). Используем второе состояние балки – действие в точке 2 сосредоточенной силы Р . Угол поворота опорного сечения 12 0 определим из условия закрепления балки в точке В: 3 l 3 1 P l 2 v x l 0 l P 0 EJ 2 6 6 Рис. 12 P l2 0 12 16 E J Согласно теореме о взаимности работ M 12 P 21 , откуда 21 M 12 M l2 P 16 E J (25)